
10장속도센서contents.kocw.net/KOCW/document/2016/chungnam/chahanju/... · 2017-02-20 · CNU...
28
10장 속도 센서
Transcript of 10장속도센서contents.kocw.net/KOCW/document/2016/chungnam/chahanju/... · 2017-02-20 · CNU...
10장 속도 센서
CNU EE 10-2
속도 센서
- 직선 속도 센서
- 가동코일형 직선속도 센서
- 가동코어형 직선속도 센서
- 각속도 센서
- 전기식 타코미터
- 광학식 회전속도 센서
- 톱니바퀴식 회전속도 센서
CNU EE 10-3
10.1 개요
- 직선 운동(linear motion)과 속도(linear velocity)§ 운동과 속도
> 직선속도는 물체 위치의 시간적 변화율로 정의된다.> 속도는 크기와 방향을 갖는 벡터량이며, 그 방향은 위치변화의 동일방향> 속도의 크기를 속력(speed or pace)라고 부르는데, 이는 물체가 얼마나 빠
르게 움직이고 있나를 정량적으로 나타낸 것이다. (예) 자동차의 스피도미터(speedometer)는 우리에게 자동차의 속력을 알려준다.
> 직선속도는 항상 어떤 기준 물체에 대해서 측정된다. 앞에서 예를 든 자동차의 스피도미터는 대지에 대해서 우리가 얼마나 빠르게 움직이고 있는가를 말해준다. 흔히 직선속도를 그냥 속도라고 부른다.
> 물체의 순간 속도는
(1)
speedometer
= lim∆→ ∆∆ = = �
CNU EE 10-4
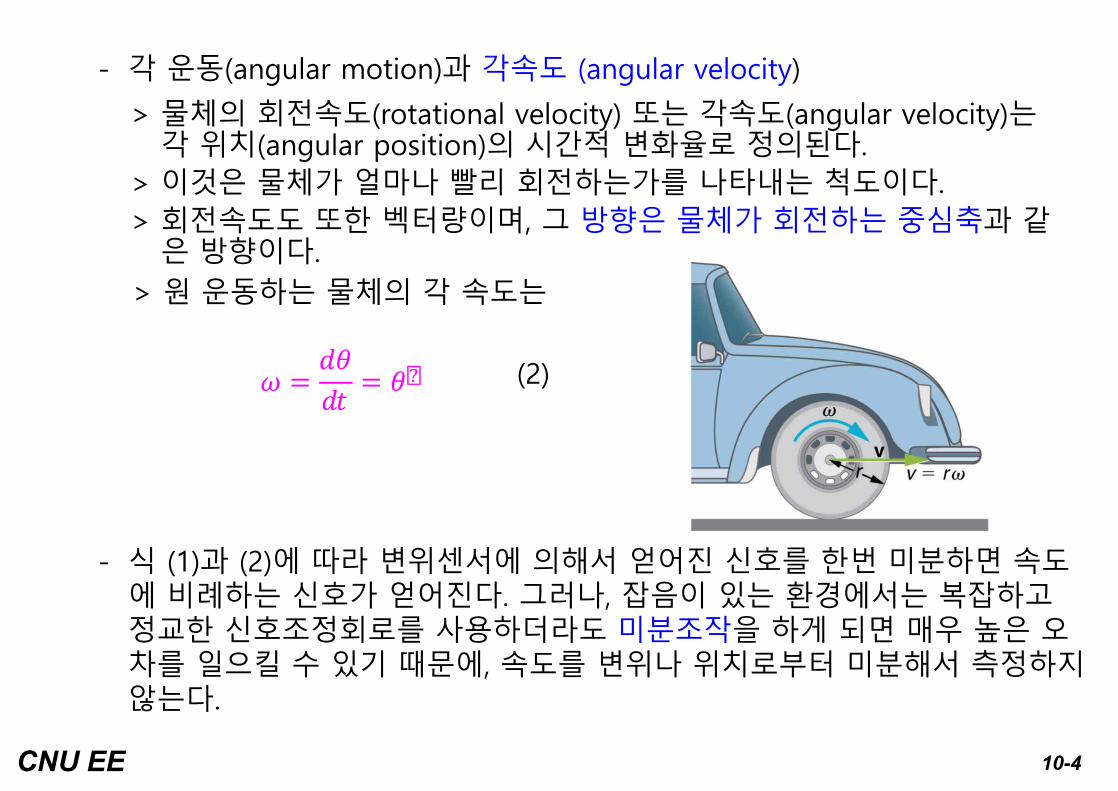
> 물체의 회전속도(rotational velocity) 또는 각속도(angular velocity)는각 위치(angular position)의 시간적 변화율로 정의된다.
> 이것은 물체가 얼마나 빨리 회전하는가를 나타내는 척도이다. > 회전속도도 또한 벡터량이며, 그 방향은 물체가 회전하는 중심축과 같
은 방향이다.
- 각 운동(angular motion)과 각속도 (angular velocity)
(2)
> 원 운동하는 물체의 각 속도는
- 식 (1)과 (2)에 따라 변위센서에 의해서 얻어진 신호를 한번 미분하면 속도에 비례하는 신호가 얻어진다. 그러나, 잡음이 있는 환경에서는 복잡하고정교한 신호조정회로를 사용하더라도 미분조작을 하게 되면 매우 높은 오차를 일으킬 수 있기 때문에, 속도를 변위나 위치로부터 미분해서 측정하지않는다.
= = �
CNU EE 10-5
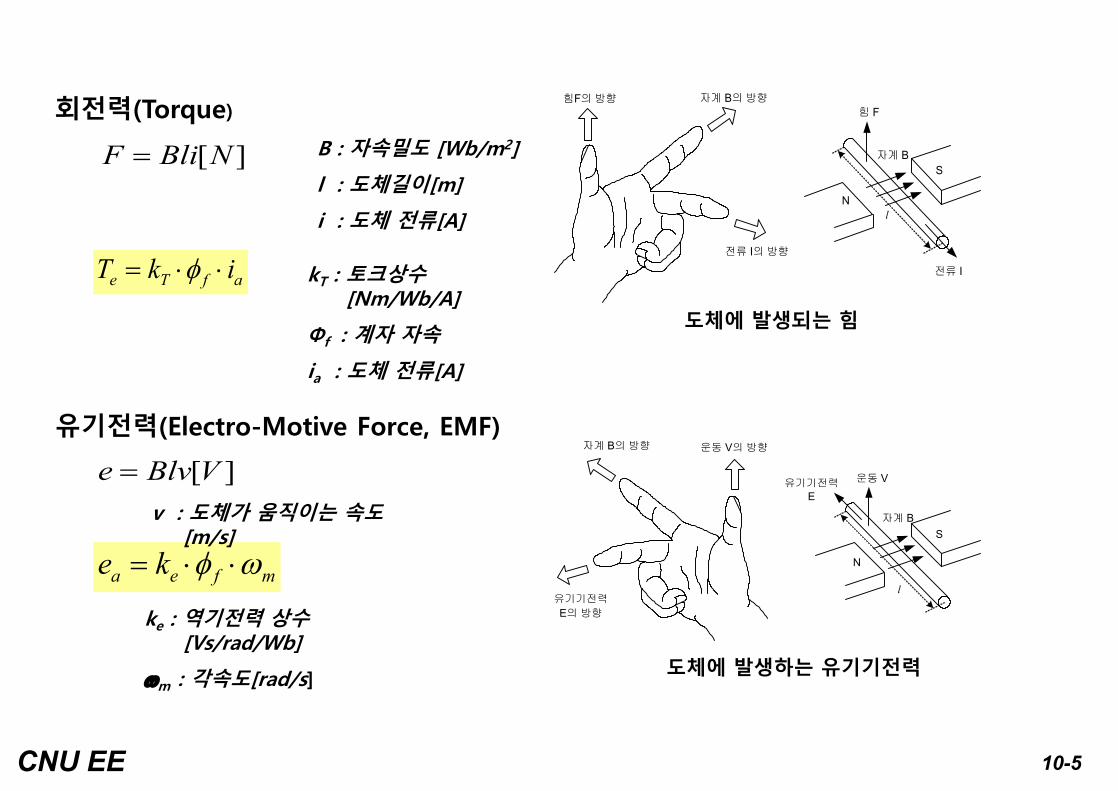
afTe ikT ××= f
][NBliF =
][VBlve =
회전력(Torque)자계 B의 방향
전류 I의 방향
힘F의 방향
전류 I
자계 B
힘 F
N
S
l
유기전력(Electro-Motive Force, EMF)
mfea ke wf ××=
자계 B의 방향
유기기전력 E의 방향
운동 V
자계 B
N
S
유기기전력 E
운동 V의 방향
l
도체에 발생되는 힘
도체에 발생하는 유기기전력
kT : 토크상수[Nm/Wb/A]
Φf : 계자 자속
ia : 도체 전류[A]
B : 자속밀도 [Wb/m2]
l : 도체길이[m]
i : 도체 전류[A]
ke : 역기전력 상수[Vs/rad/Wb]
wm : 각속도[rad/s]
v : 도체가 움직이는 속도[m/s]
CNU EE 10-6
10.2 직선속도센서
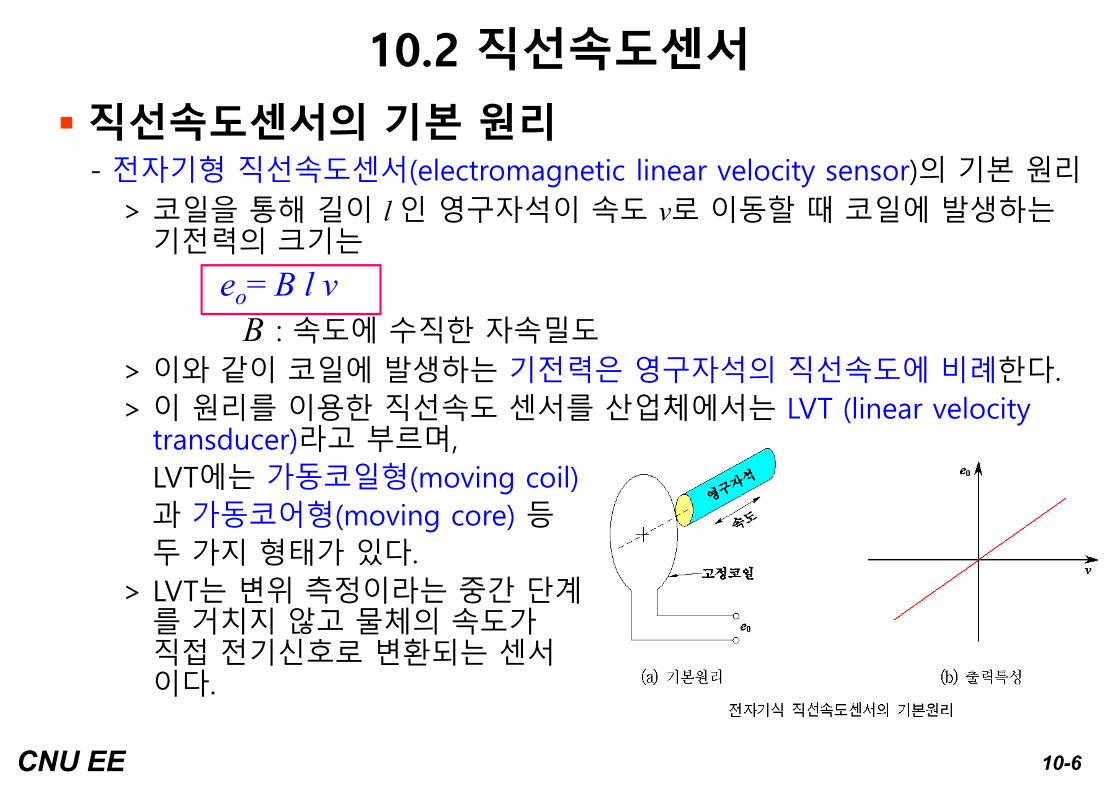
§ 직선속도센서의 기본 원리- 전자기형 직선속도센서(electromagnetic linear velocity sensor)의 기본 원리
> 코일을 통해 길이 l 인 영구자석이 속도 v로 이동할 때 코일에 발생하는기전력의 크기는
eo= B l vB : 속도에 수직한 자속밀도
> 이와 같이 코일에 발생하는 기전력은 영구자석의 직선속도에 비례한다. > 이 원리를 이용한 직선속도 센서를 산업체에서는 LVT (linear velocity
transducer)라고 부르며, LVT에는 가동코일형(moving coil)과 가동코어형(moving core) 등두 가지 형태가 있다.
> LVT는 변위 측정이라는 중간 단계를 거치지 않고 물체의 속도가직접 전기신호로 변환되는 센서이다.
CNU EE 10-7
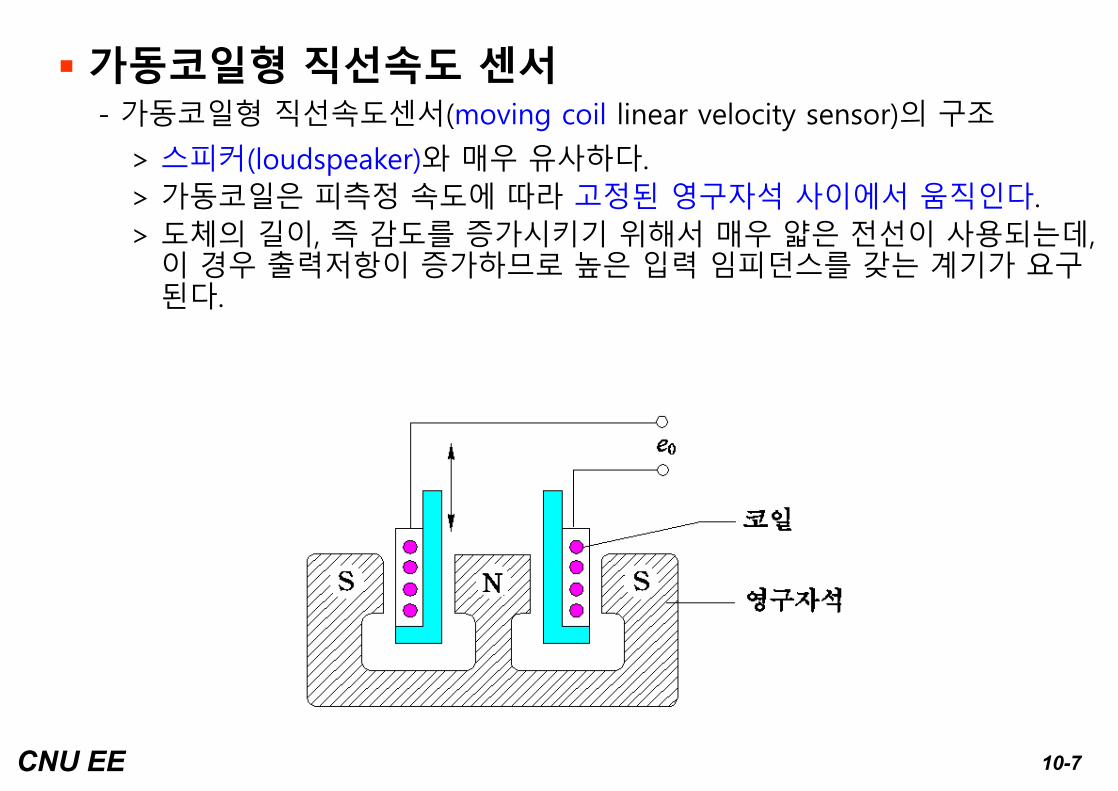
- 가동코일형 직선속도센서(moving coil linear velocity sensor)의 구조
> 스피커(loudspeaker)와 매우 유사하다. > 가동코일은 피측정 속도에 따라 고정된 영구자석 사이에서 움직인다.> 도체의 길이, 즉 감도를 증가시키기 위해서 매우 얇은 전선이 사용되는데,
이 경우 출력저항이 증가하므로 높은 입력 임피던스를 갖는 계기가 요구된다.
§ 가동코일형 직선속도 센서
CNU EE 10-8
CNU EE 10-9
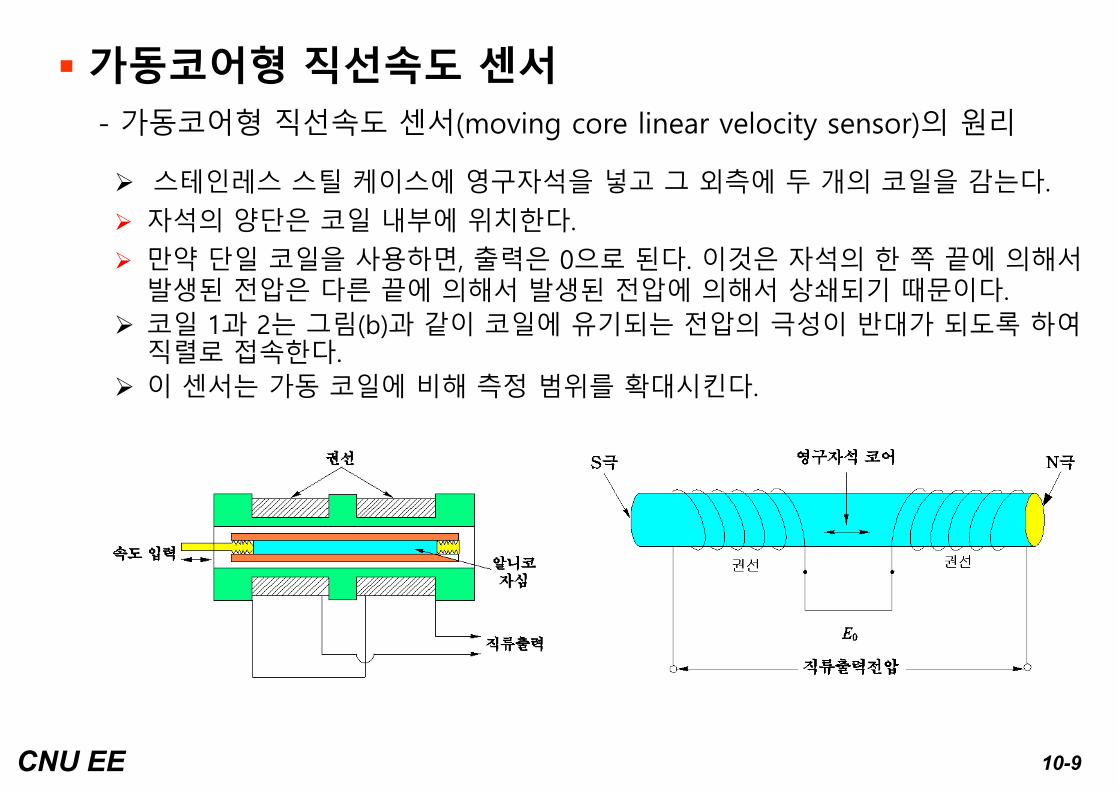
- 가동코어형 직선속도 센서(moving core linear velocity sensor)의 원리
Ø 스테인레스 스틸 케이스에 영구자석을 넣고 그 외측에 두 개의 코일을 감는다.
Ø 자석의 양단은 코일 내부에 위치한다.
Ø 만약 단일 코일을 사용하면, 출력은 0으로 된다. 이것은 자석의 한 쪽 끝에 의해서발생된 전압은 다른 끝에 의해서 발생된 전압에 의해서 상쇄되기 때문이다.
Ø 코일 1과 2는 그림(b)과 같이 코일에 유기되는 전압의 극성이 반대가 되도록 하여직렬로 접속한다.
Ø 이 센서는 가동 코일에 비해 측정 범위를 확대시킨다.
§ 가동코어형 직선속도 센서
CNU EE 10-10
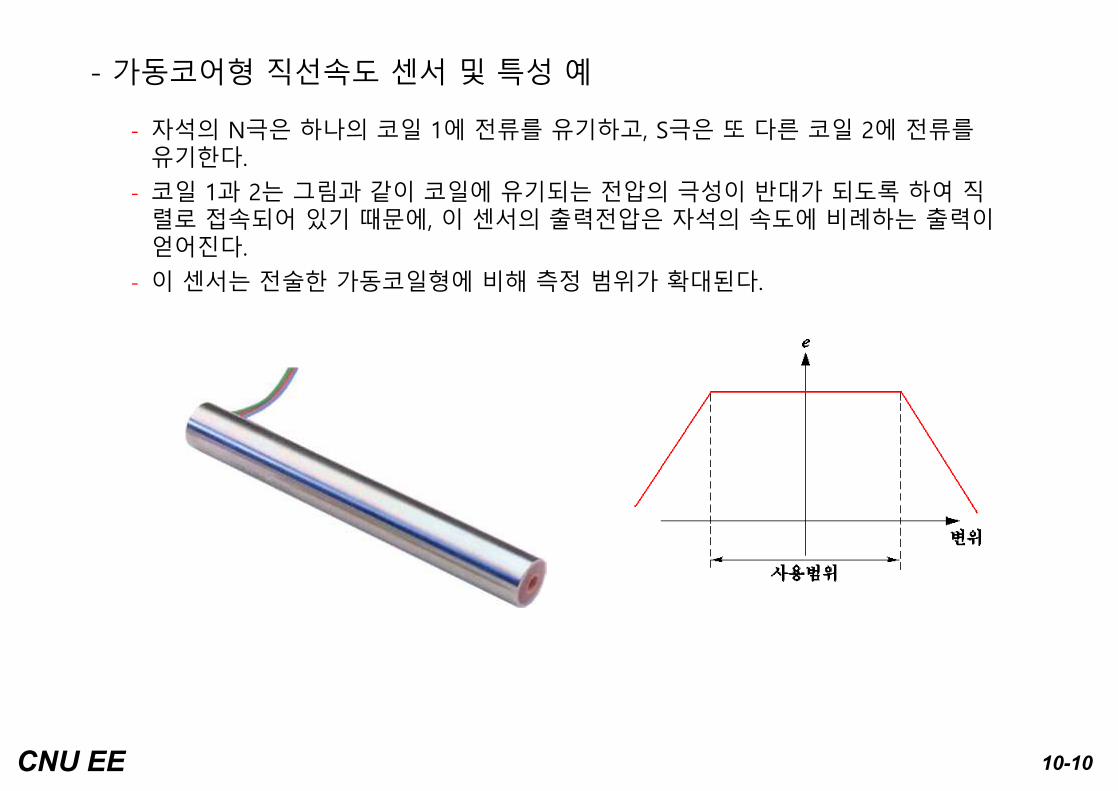
- 가동코어형 직선속도 센서 및 특성 예
- 자석의 N극은 하나의 코일 1에 전류를 유기하고, S극은 또 다른 코일 2에 전류를유기한다.
- 코일 1과 2는 그림과 같이 코일에 유기되는 전압의 극성이 반대가 되도록 하여 직렬로 접속되어 있기 때문에, 이 센서의 출력전압은 자석의 속도에 비례하는 출력이얻어진다.
- 이 센서는 전술한 가동코일형에 비해 측정 범위가 확대된다.
CNU EE 10-11
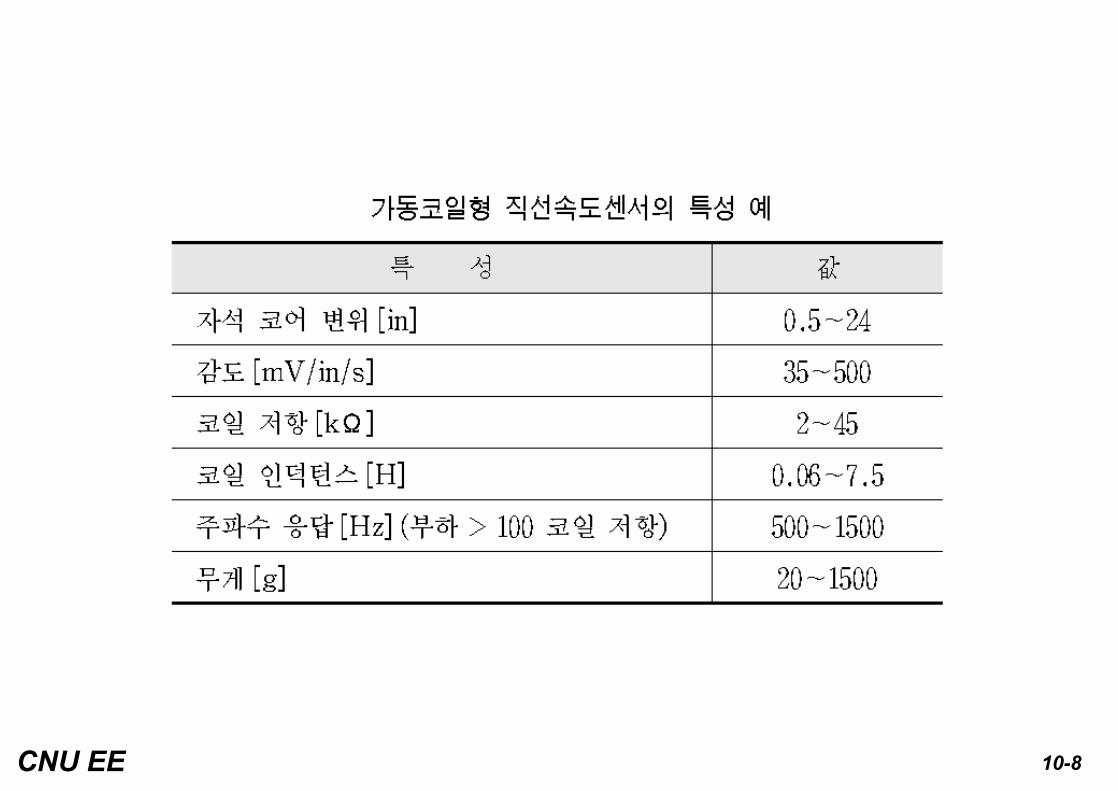
§ 전자기식 직선속도 센서의 특성
• 가동코일형 속도센서의 감도는 보통 약 10[mV/mm/s]이고, 대역폭은 10[Hz]~1000[Hz] 이다.
• 가동코어형 직선속도센서의 동작범위는 0.5[in.]~24[in.]이고, 전형적인 감도는40[mV/in/s]~600[mV/in/s] 이다.
• 전자기식 속도 센서의 가장 큰 특징은 자기 스스로 직류전압을 출력하기 때문에외부 전원이 불필요하다는 점이다.
• 감도가 우수하고 사용 주파수가 높다.
• 이 센서의 최대 검출가능 속도는 주로 인터페이스 회로의 입력단에 의해서 결정된다. 최소 검출 속도는 잡음에 의해서 결정된다.
• 직선속도센서는 센서 크기에 의해서 제약을 받는 거리를 따라 속도를 검출한다. 그러므로 대부분의 경우 이 속도센서는 진동속도 측정에 사용된다.
§ 전자기식 직선속도 센서의 특징
CNU EE 10-12
10.3 각속도 센서- 회전체에서 단위시간당 변위하는 각을 각속도, 각속도가 일정할 때 단위시간당
회전수를 회전속도로 구분한다. - 일반적으로 회전속도를 단순히 회전수라고 부르며 보통 1분간의 회전수
(revolution per minute; rpm)로 나타낸다.- 각속도(angular velocity) 측정은 펌프, 엔진, 발전기 등과 같은 회전기기에서 자
주 요구된다.
CNU EE 10-13
패러데이의전자유도 법칙
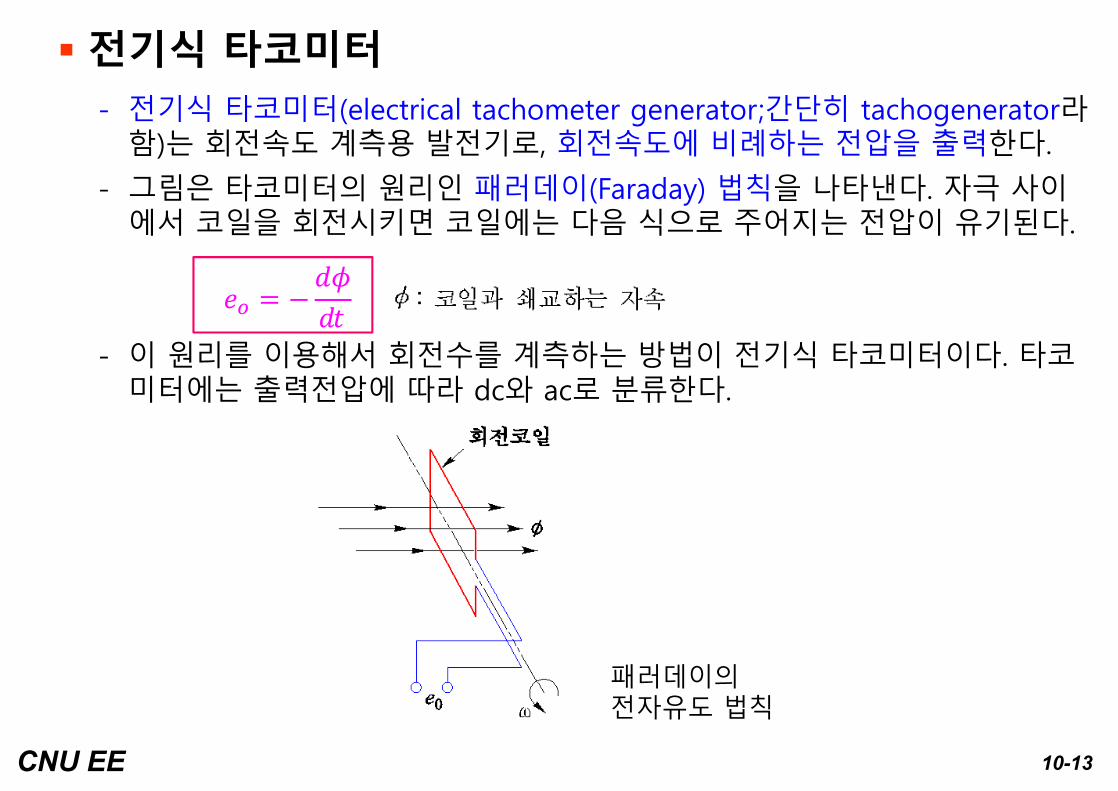
§ 전기식 타코미터- 전기식 타코미터(electrical tachometer generator;간단히 tachogenerator라
함)는 회전속도 계측용 발전기로, 회전속도에 비례하는 전압을 출력한다.
- 그림은 타코미터의 원리인 패러데이(Faraday) 법칙을 나타낸다. 자극 사이에서 코일을 회전시키면 코일에는 다음 식으로 주어지는 전압이 유기된다.
- 이 원리를 이용해서 회전수를 계측하는 방법이 전기식 타코미터이다. 타코미터에는 출력전압에 따라 dc와 ac로 분류한다.
= −
CNU EE 10-14
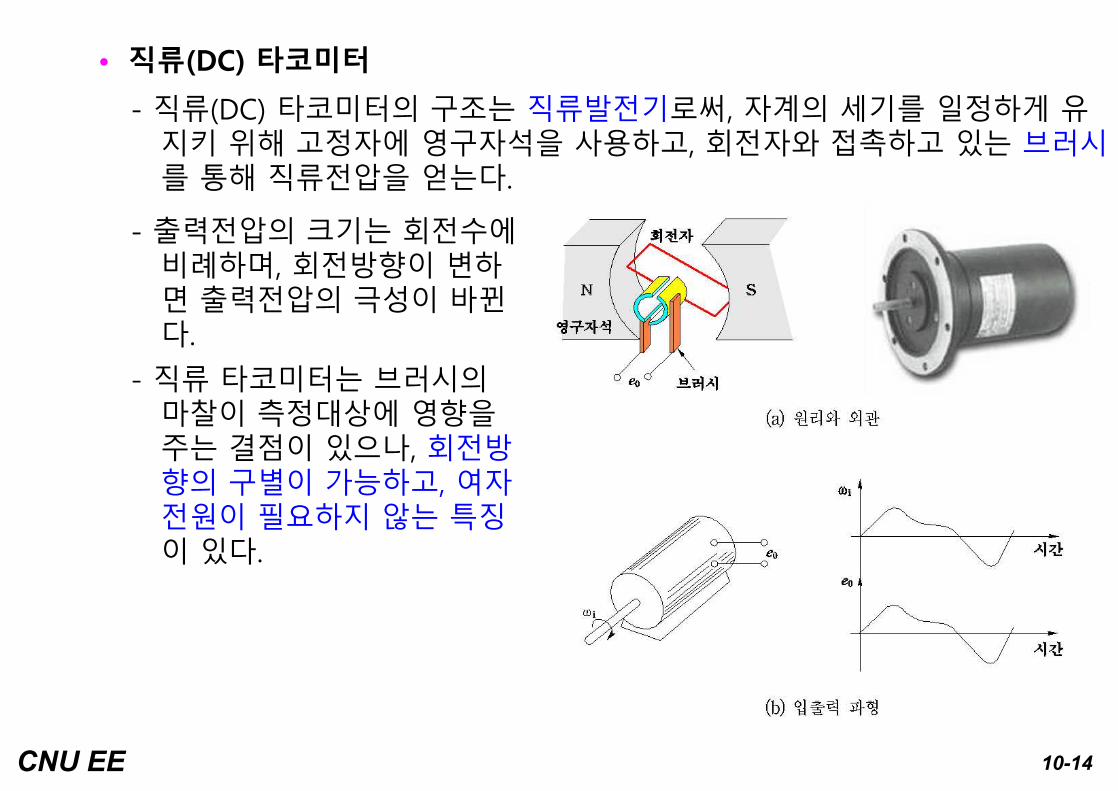
• 직류(DC) 타코미터
- 직류(DC) 타코미터의 구조는 직류발전기로써, 자계의 세기를 일정하게 유지키 위해 고정자에 영구자석을 사용하고, 회전자와 접촉하고 있는 브러시를 통해 직류전압을 얻는다.
- 출력전압의 크기는 회전수에비례하며, 회전방향이 변하면 출력전압의 극성이 바뀐다.
- 직류 타코미터는 브러시의마찰이 측정대상에 영향을주는 결점이 있으나, 회전방향의 구별이 가능하고, 여자전원이 필요하지 않는 특징이 있다.
CNU EE 10-15
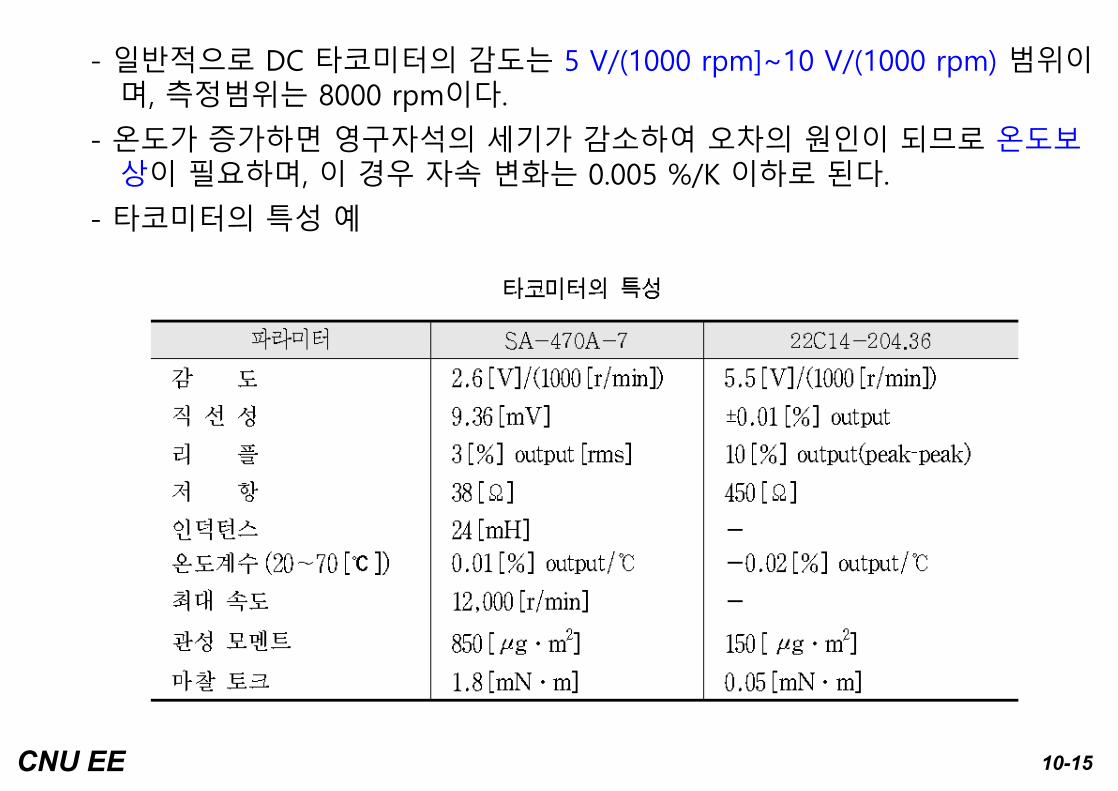
- 일반적으로 DC 타코미터의 감도는 5 V/(1000 rpm]~10 V/(1000 rpm) 범위이며, 측정범위는 8000 rpm이다.
- 온도가 증가하면 영구자석의 세기가 감소하여 오차의 원인이 되므로 온도보상이 필요하며, 이 경우 자속 변화는 0.005 %/K 이하로 된다.
- 타코미터의 특성 예
CNU EE 10-16
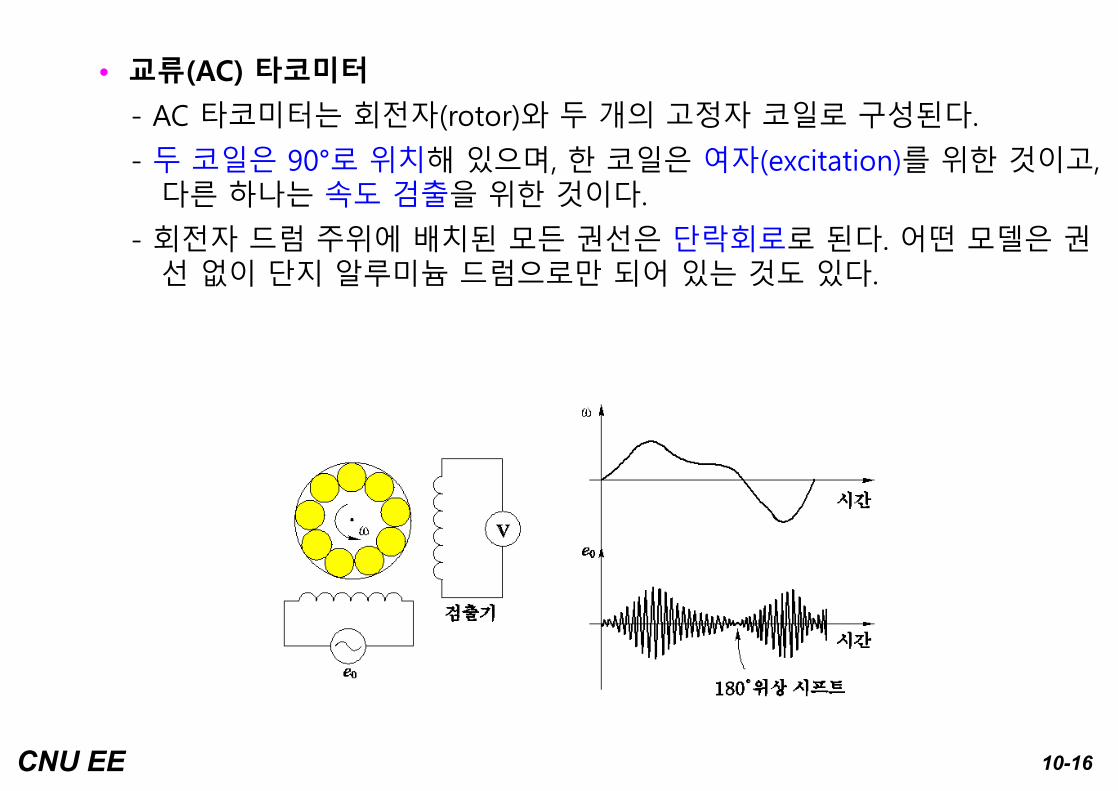
- AC 타코미터는 회전자(rotor)와 두 개의 고정자 코일로 구성된다.
- 두 코일은 90°로 위치해 있으며, 한 코일은 여자(excitation)를 위한 것이고, 다른 하나는 속도 검출을 위한 것이다.
- 회전자 드럼 주위에 배치된 모든 권선은 단락회로로 된다. 어떤 모델은 권선 없이 단지 알루미늄 드럼으로만 되어 있는 것도 있다.
• 교류(AC) 타코미터
CNU EE 10-17
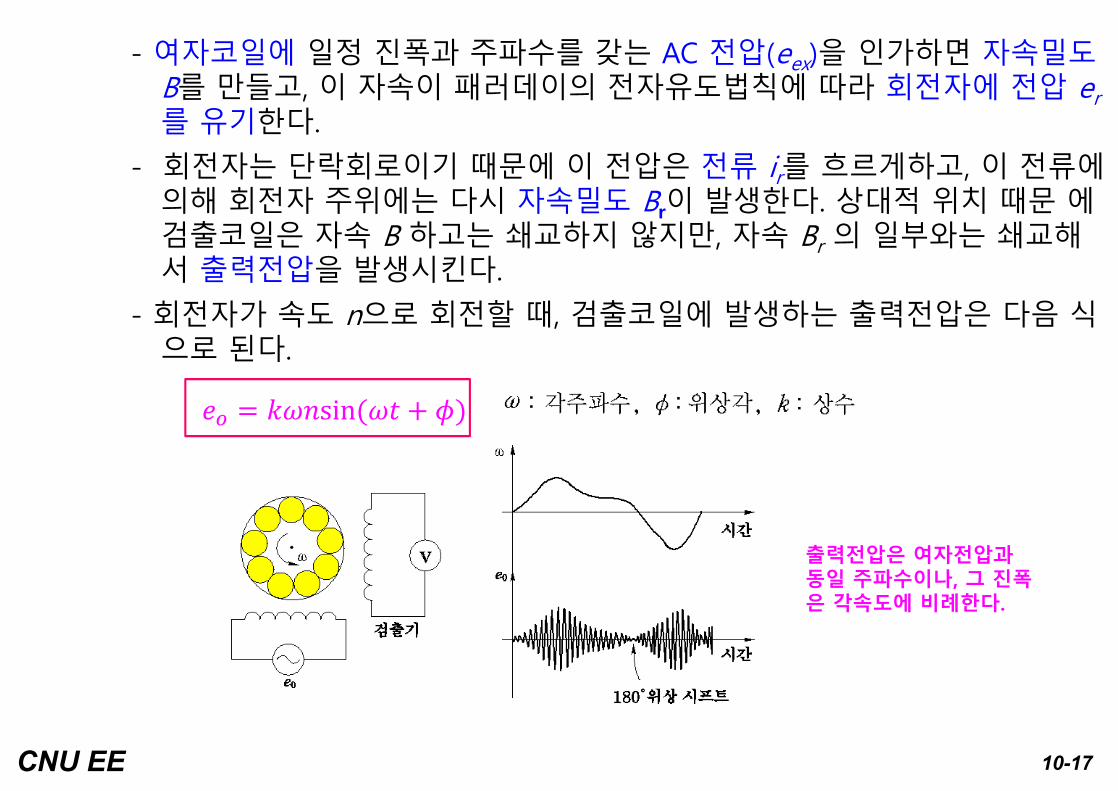
- 여자코일에 일정 진폭과 주파수를 갖는 AC 전압(eex)을 인가하면 자속밀도B를 만들고, 이 자속이 패러데이의 전자유도법칙에 따라 회전자에 전압 er를 유기한다.
- 회전자는 단락회로이기 때문에 이 전압은 전류 ir를 흐르게하고, 이 전류에의해 회전자 주위에는 다시 자속밀도 Br이 발생한다. 상대적 위치 때문 에검출코일은 자속 B 하고는 쇄교하지 않지만, 자속 Br 의 일부와는 쇄교해서 출력전압을 발생시킨다.
- 회전자가 속도 n으로 회전할 때, 검출코일에 발생하는 출력전압은 다음 식으로 된다.
출력전압은 여자전압과동일 주파수이나, 그 진폭은 각속도에 비례한다.
= sin( + )
CNU EE 10-18
- 이와 같이 출력전압은 여자전압과 동일 주파수이나 그것의 진폭은 각속도에 비례한다.
- 회전방향은 신호의 위상차가 180° 이상(異相; out of phase)이 되는 것에의해서 결정된다.
- AC 타코미터의 전형적인 감도는 3 V/(1000 rpm)~10 V/(1000 rpm) 범위이다.
- 권선저항이 온도에 따라 변하기 때문에 감도는 온도에 의존한다. 이것을보상하기 위해서 일부 모델은 보상용 NTC 써미스터가 사용되고 있다.
CNU EE 10-19
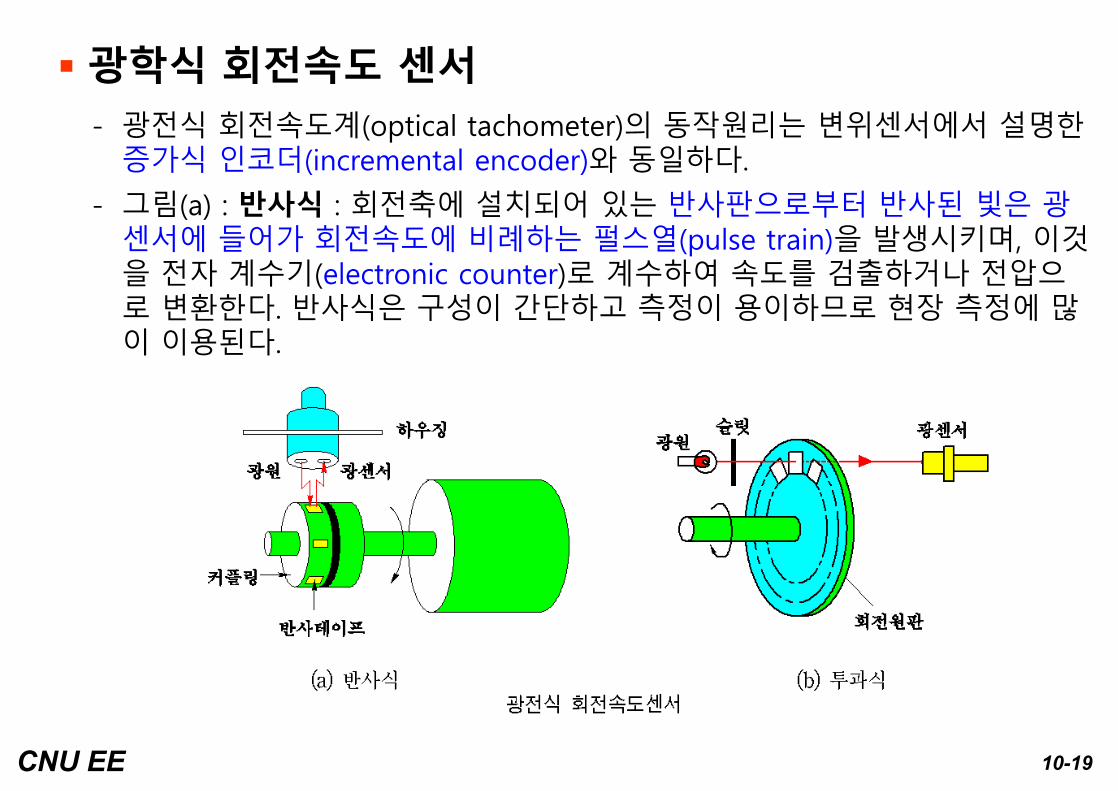
§ 광학식 회전속도 센서- 광전식 회전속도계(optical tachometer)의 동작원리는 변위센서에서 설명한
증가식 인코더(incremental encoder)와 동일하다.
- 그림(a) : 반사식 : 회전축에 설치되어 있는 반사판으로부터 반사된 빛은 광센서에 들어가 회전속도에 비례하는 펄스열(pulse train)을 발생시키며, 이것을 전자 계수기(electronic counter)로 계수하여 속도를 검출하거나 전압으로 변환한다. 반사식은 구성이 간단하고 측정이 용이하므로 현장 측정에 많이 이용된다.
CNU EE 10-20
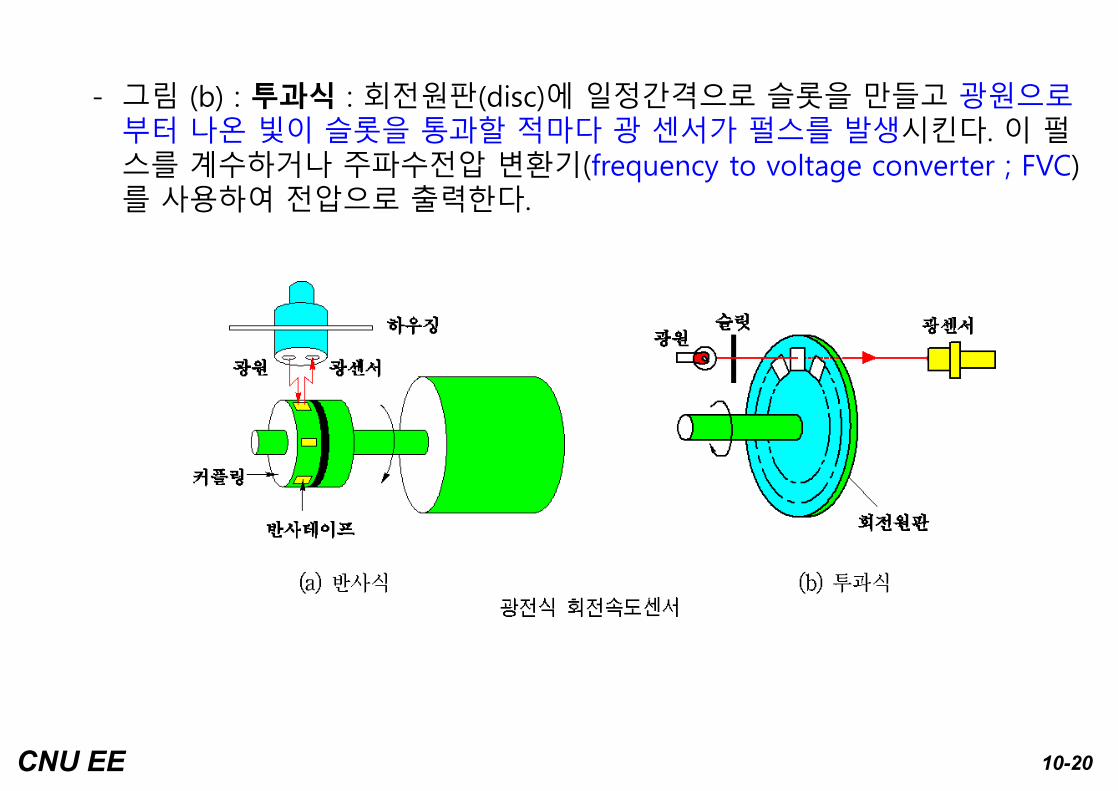
- 그림 (b) : 투과식 : 회전원판(disc)에 일정간격으로 슬롯을 만들고 광원으로부터 나온 빛이 슬롯을 통과할 적마다 광 센서가 펄스를 발생시킨다. 이 펄스를 계수하거나 주파수전압 변환기(frequency to voltage converter ; FVC)를 사용하여 전압으로 출력한다.

CNU EE 10-21
§ 톱니바퀴식 회전속도 센서- 톱니바퀴식 회전속도센서(geartooth sensor)는 자동차에서 캠샤프트(cam
shaft)와 크랭크샤프트(crankshaft) 등의 위치 및 회전속도 측정에 널리 사용되는 센서이다.
- 검출용 센서에 따라 여러 가지로 분류한다.
> 자기식 톱니바퀴 센서(magnetic gear-tooth sensor)
> 홀 효과 톱니바퀴 센서(Halleffect gear-tooth sensor)
> 자기저항식 톱니바퀴 센서(magetoresistive gear-tooth sensor)
CNU EE 10-22
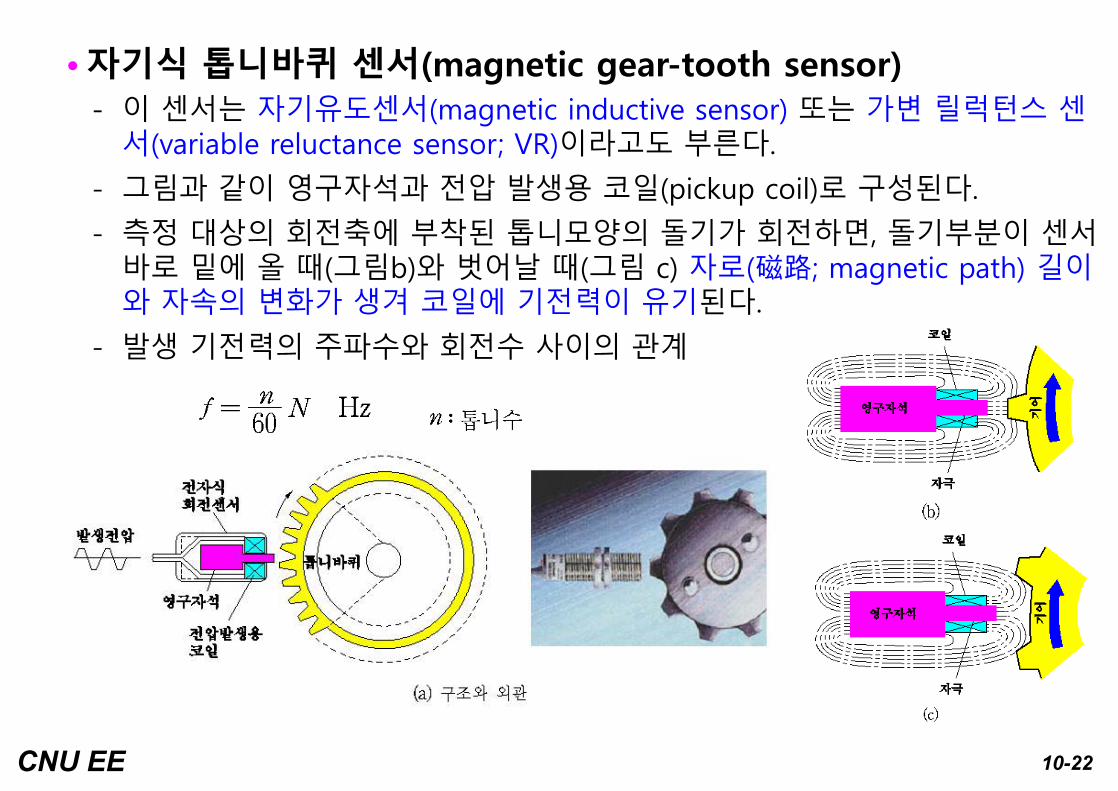
• 자기식 톱니바퀴 센서(magnetic gear-tooth sensor)- 이 센서는 자기유도센서(magnetic inductive sensor) 또는 가변 릴럭턴스 센
서(variable reluctance sensor; VR)이라고도 부른다.
- 그림과 같이 영구자석과 전압 발생용 코일(pickup coil)로 구성된다.
- 측정 대상의 회전축에 부착된 톱니모양의 돌기가 회전하면, 돌기부분이 센서바로 밑에 올 때(그림b)와 벗어날 때(그림 c) 자로(磁路; magnetic path) 길이와 자속의 변화가 생겨 코일에 기전력이 유기된다.
- 발생 기전력의 주파수와 회전수 사이의 관계
CNU EE 10-23
- 전자식 검출기는 영구자석과 코일만을 사용하므로 전원이 불필요한 장점이있으나, 저속회전에서는 출력이 현저히 작아지는 결점이 있다.
- 그래서, 코일 대신에 홀 소자(Hall effect device)나 자기저항소자(MR)를 사용한다.
CNU EE 10-24
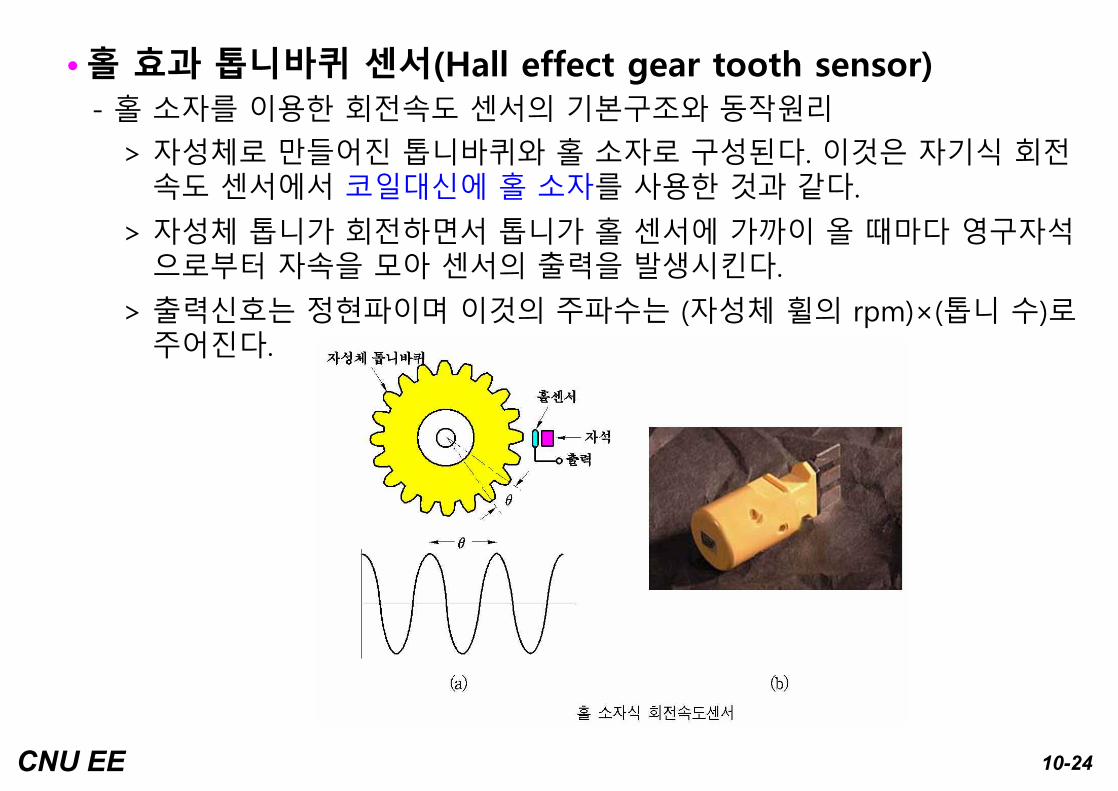
• 홀 효과 톱니바퀴 센서(Hall effect gear tooth sensor)- 홀 소자를 이용한 회전속도 센서의 기본구조와 동작원리
> 자성체로 만들어진 톱니바퀴와 홀 소자로 구성된다. 이것은 자기식 회전속도 센서에서 코일대신에 홀 소자를 사용한 것과 같다.
> 자성체 톱니가 회전하면서 톱니가 홀 센서에 가까이 올 때마다 영구자석으로부터 자속을 모아 센서의 출력을 발생시킨다.
> 출력신호는 정현파이며 이것의 주파수는 (자성체 휠의 rpm)×(톱니 수)로주어진다.
CNU EE 10-25
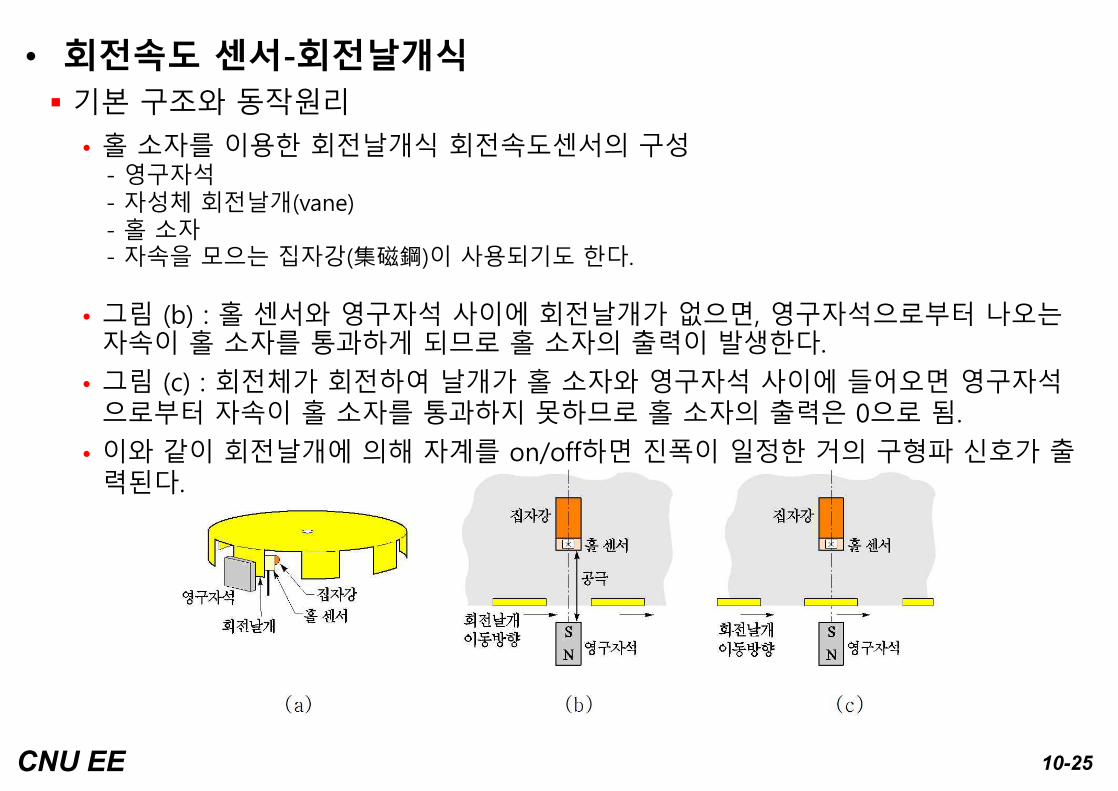
• 회전속도 센서-회전날개식
• 홀 소자를 이용한 회전날개식 회전속도센서의 구성- 영구자석- 자성체 회전날개(vane)- 홀 소자- 자속을 모으는 집자강(集磁鋼)이 사용되기도 한다.
• 그림 (b) : 홀 센서와 영구자석 사이에 회전날개가 없으면, 영구자석으로부터 나오는자속이 홀 소자를 통과하게 되므로 홀 소자의 출력이 발생한다.
• 그림 (c) : 회전체가 회전하여 날개가 홀 소자와 영구자석 사이에 들어오면 영구자석으로부터 자속이 홀 소자를 통과하지 못하므로 홀 소자의 출력은 0으로 됨.
• 이와 같이 회전날개에 의해 자계를 on/off하면 진폭이 일정한 거의 구형파 신호가 출력된다.
§ 기본 구조와 동작원리
CNU EE 10-26
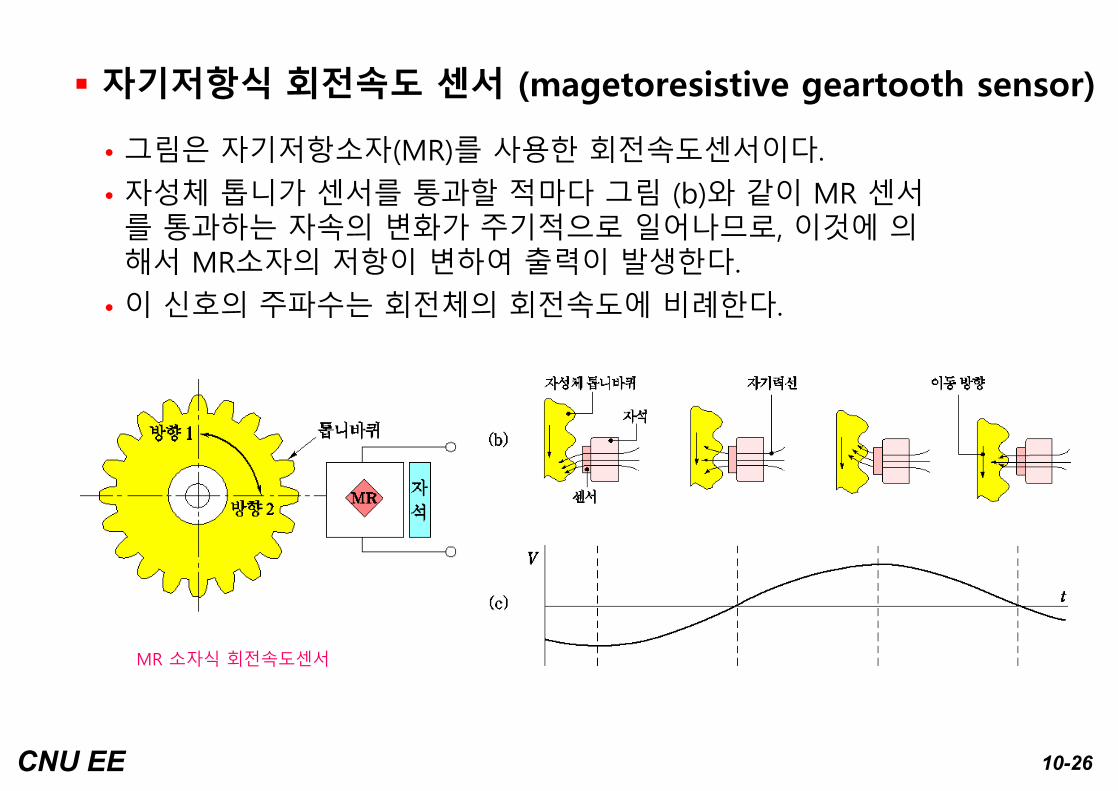
• 그림은 자기저항소자(MR)를 사용한 회전속도센서이다.
• 자성체 톱니가 센서를 통과할 적마다 그림 (b)와 같이 MR 센서를 통과하는 자속의 변화가 주기적으로 일어나므로, 이것에 의해서 MR소자의 저항이 변하여 출력이 발생한다.
• 이 신호의 주파수는 회전체의 회전속도에 비례한다.
§ 자기저항식 회전속도 센서 (magetoresistive geartooth sensor)
MR 소자식 회전속도센서
Sensor System Design
- 3주간 Team project 수행- 최종 발표시 프로그램, 발표자료, 동영상 제출- 발표 당일에 시연
![week2.ppt [호환 모드] - KOCWcontents.kocw.net/KOCW/document/2016/chungnam/chahanju/2.pdf · 2017-02-20 · Microsoft PowerPoint - week2.ppt [호환 모드] Author: 삼성컴퓨터](https://static.fdocument.pub/doc/165x107/5f80e2c404b78e35333f9290/week2ppt-eeoe-2017-02-20-microsoft-powerpoint-week2ppt-.jpg)


![CNU · è g , &$$, Ú] ` % 의과대학 ...](https://static.fdocument.pub/doc/165x107/606cdacf17fc011f295260b2/cnu-g-eeoe-.jpg)



![week3.ppt [호환 모드] - KOCWcontents.kocw.net/KOCW/document/2016/chungnam/chahanju/3.pdf · 2017-02-20 · Microsoft PowerPoint - week3.ppt [호환 모드] Author: 삼성컴퓨터](https://static.fdocument.pub/doc/165x107/5f5a97fbf28fd635b65e569d/week3ppt-eeoe-2017-02-20-microsoft-powerpoint-week3ppt-.jpg)










