센서와계측공학 Sensor & Measurement...
36
센서와 계측공학 Sensor & Measurement Engineering
Transcript of 센서와계측공학 Sensor & Measurement...

센서와 계측공학Sensor & Measurement
Engineering

1장 센서의 기초
1-3
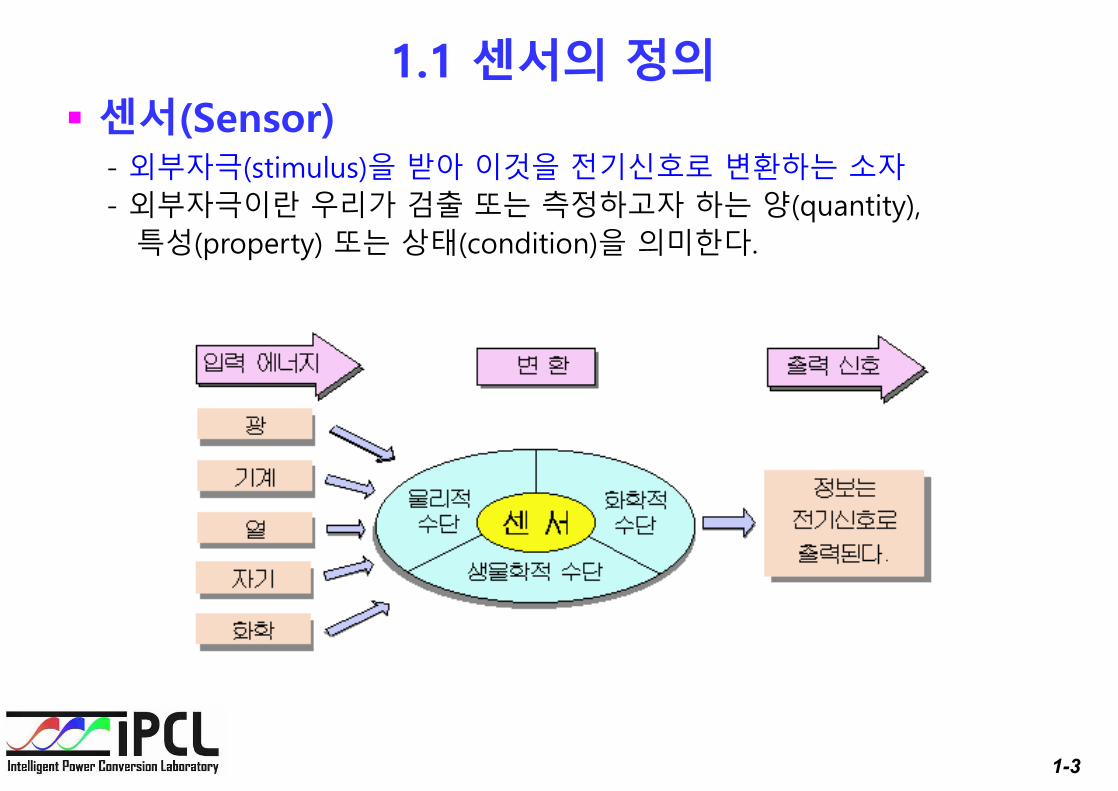
1.1 센서의 정의§ 센서(Sensor)
- 외부자극(stimulus)을 받아 이것을 전기신호로 변환하는 소자- 외부자극이란 우리가 검출 또는 측정하고자 하는 양(quantity),
특성(property) 또는 상태(condition)을 의미한다.
1-4
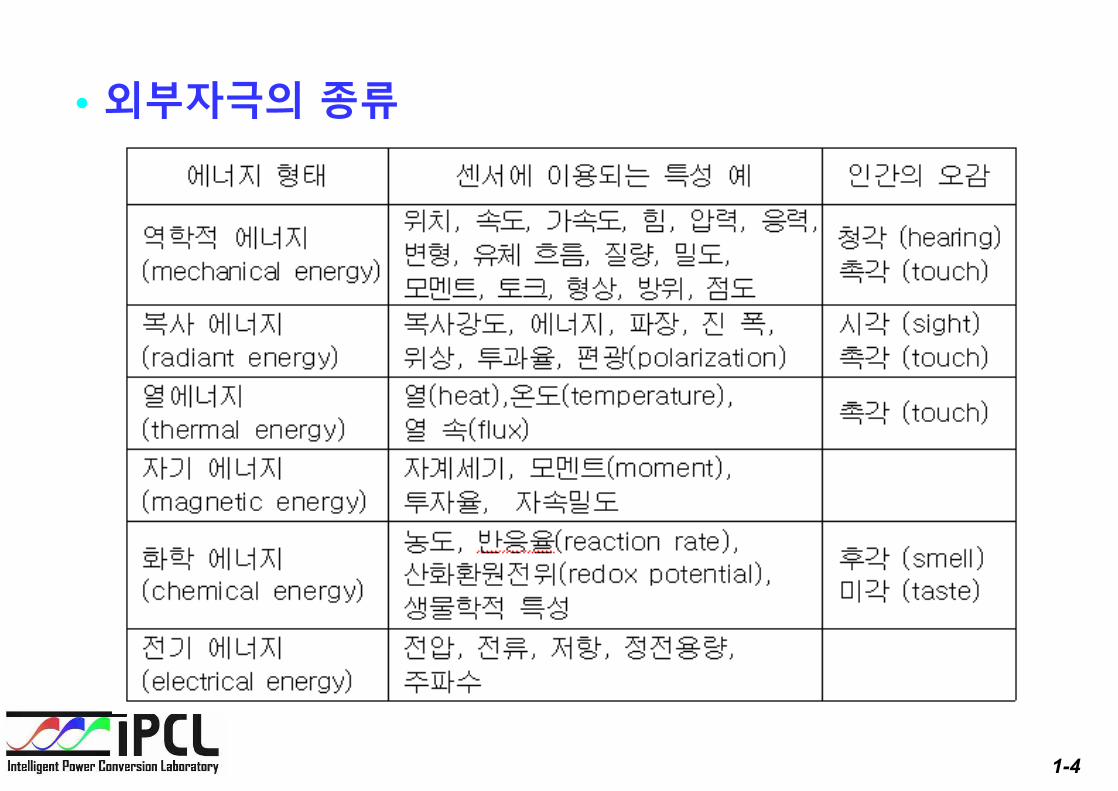
• 외부자극의 종류
1-5
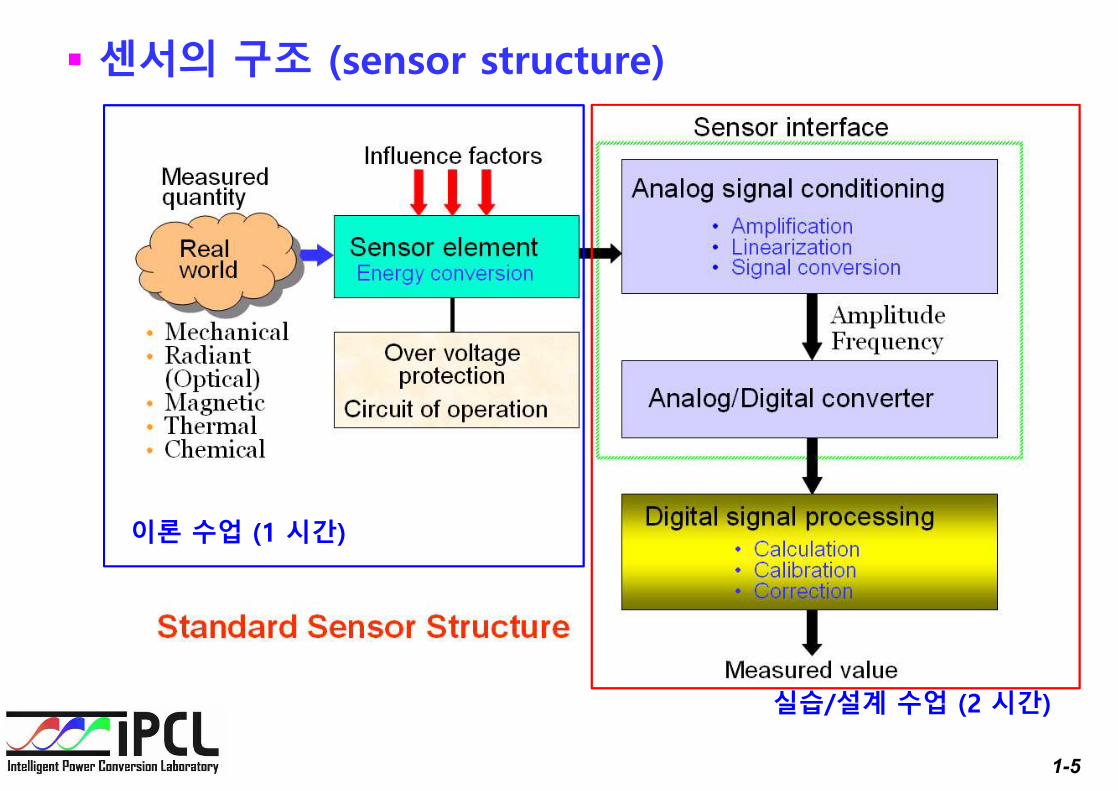
§ 센서의 구조 (sensor structure)
이론 수업 (1 시간)
실습/설계 수업 (2 시간)

1-6
§ 센서 기술 (sensor technology)• 센서와 센서 시스템은 센서구조, 제조기술, 신호처리 알고리즘이 서로 맞물린 상호작용을 통해서 그들의 기능을 수행하며, 결과적으로 센서기술의 발전도 이 분야들의 기술적 진보에 기초를 두고 있다.
• 센서 기술은 센서와 관련된 소프트웨어(S/W)와 하드웨어(H/W) 기술을 포함한다.
1-7
§ 센서의 특성• 정특성 (static characteristics) : steady state response
- 입력이 시간적으로 변하지 않을 때의 특성- 예 : 감도(sensitivity)
직선성(linearity)히스테리시스(hysteresis)
• 동특성 (dynamic characteristics) : transient response- 입력이 시간에 따라 변할 때의 특성- 예 : 응답시간
주파수 특성
1.2 센서의 용어 (Terminology)
1-8
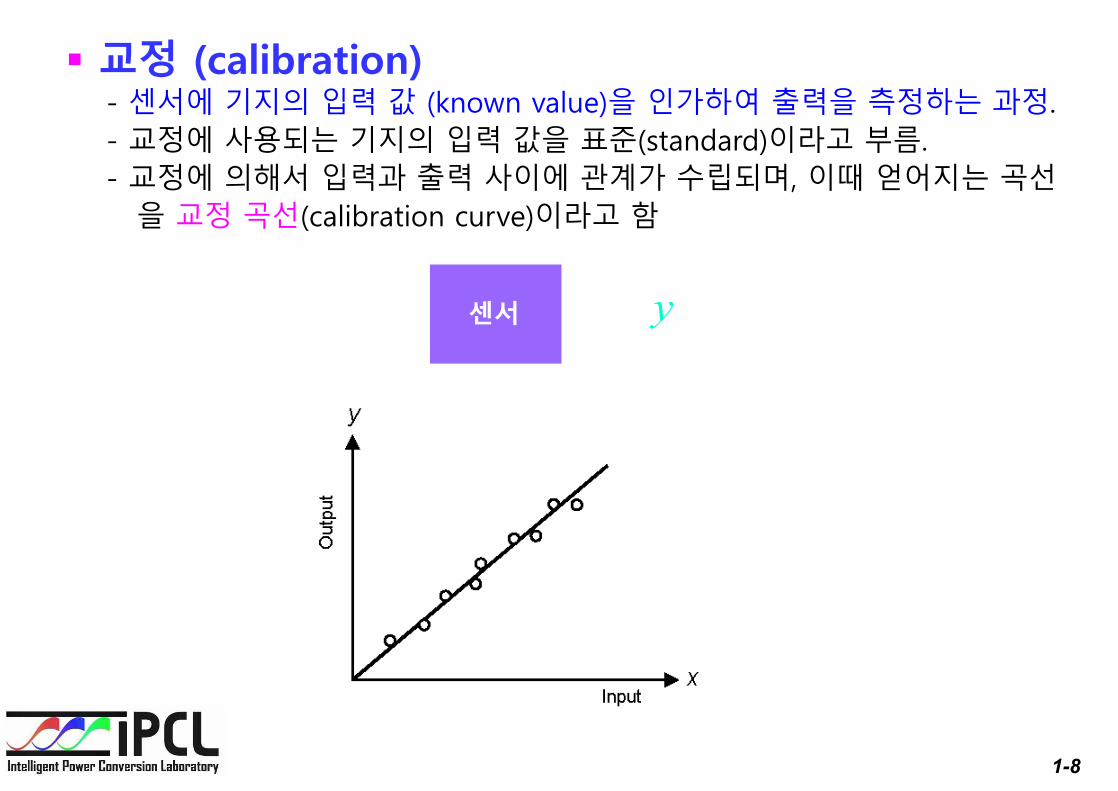
§ 교정 (calibration)- 센서에 기지의 입력 값 (known value)을 인가하여 출력을 측정하는 과정.- 교정에 사용되는 기지의 입력 값을 표준(standard)이라고 부름.- 교정에 의해서 입력과 출력 사이에 관계가 수립되며, 이때 얻어지는 곡선
을 교정 곡선(calibration curve)이라고 함
교정곡선
센서 y
1-9
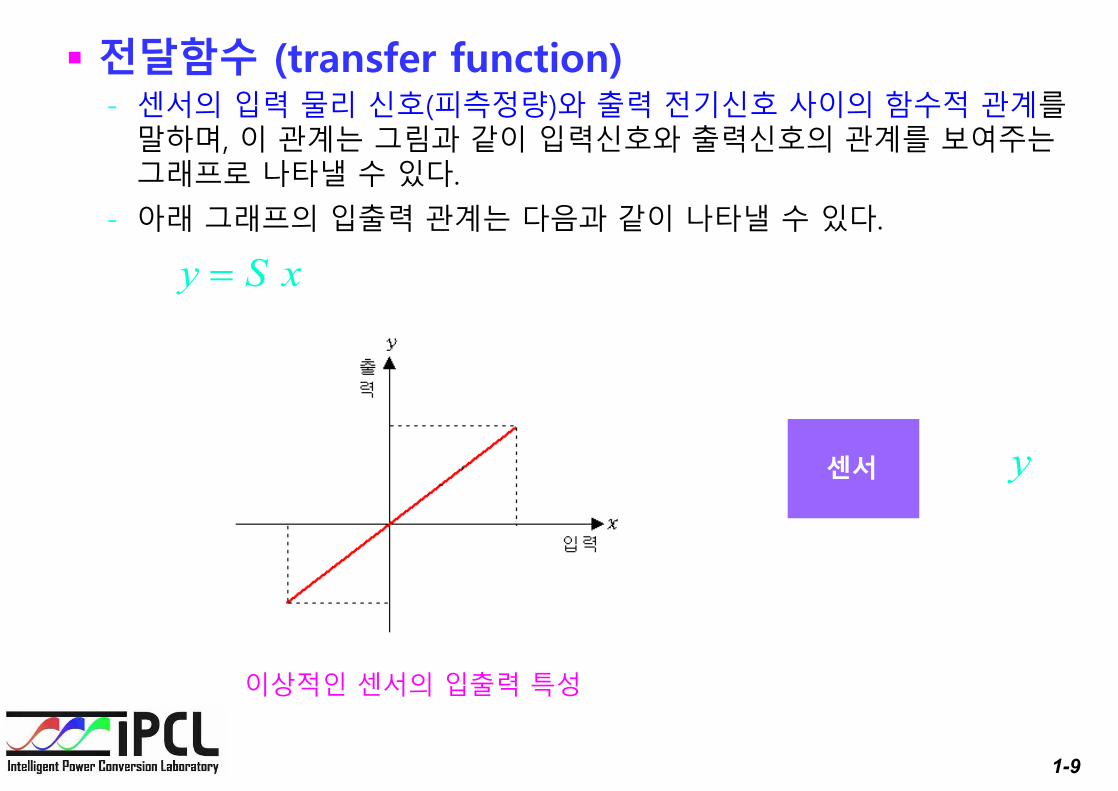
§ 전달함수 (transfer function)
xSy =
이상적인 센서의 입출력 특성
센서 y
- 센서의 입력 물리 신호(피측정량)와 출력 전기신호 사이의 함수적 관계를말하며, 이 관계는 그림과 같이 입력신호와 출력신호의 관계를 보여주는그래프로 나타낼 수 있다.
- 아래 그래프의 입출력 관계는 다음과 같이 나타낼 수 있다.
1-10
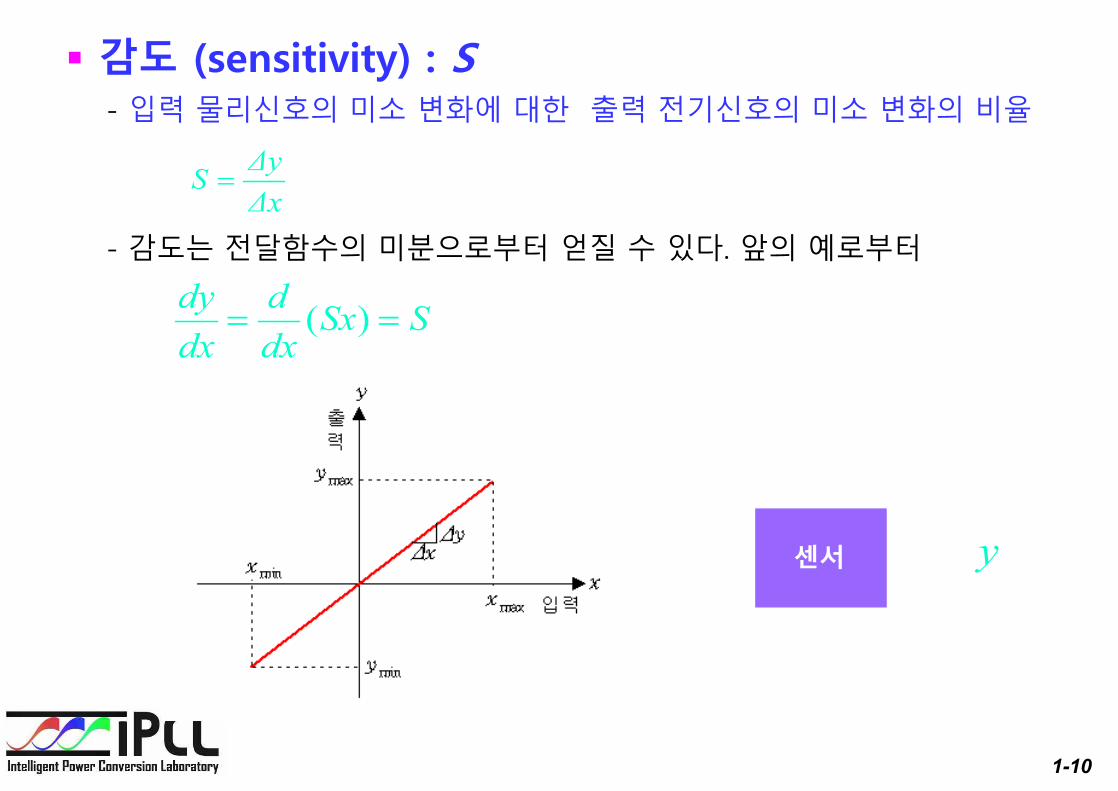
§ 감도 (sensitivity) : S- 입력 물리신호의 미소 변화에 대한 출력 전기신호의 미소 변화의 비율
ΔxΔyS =
SSxdxd
dxdy
== )(
센서 y
- 감도는 전달함수의 미분으로부터 얻질 수 있다. 앞의 예로부터
1-11
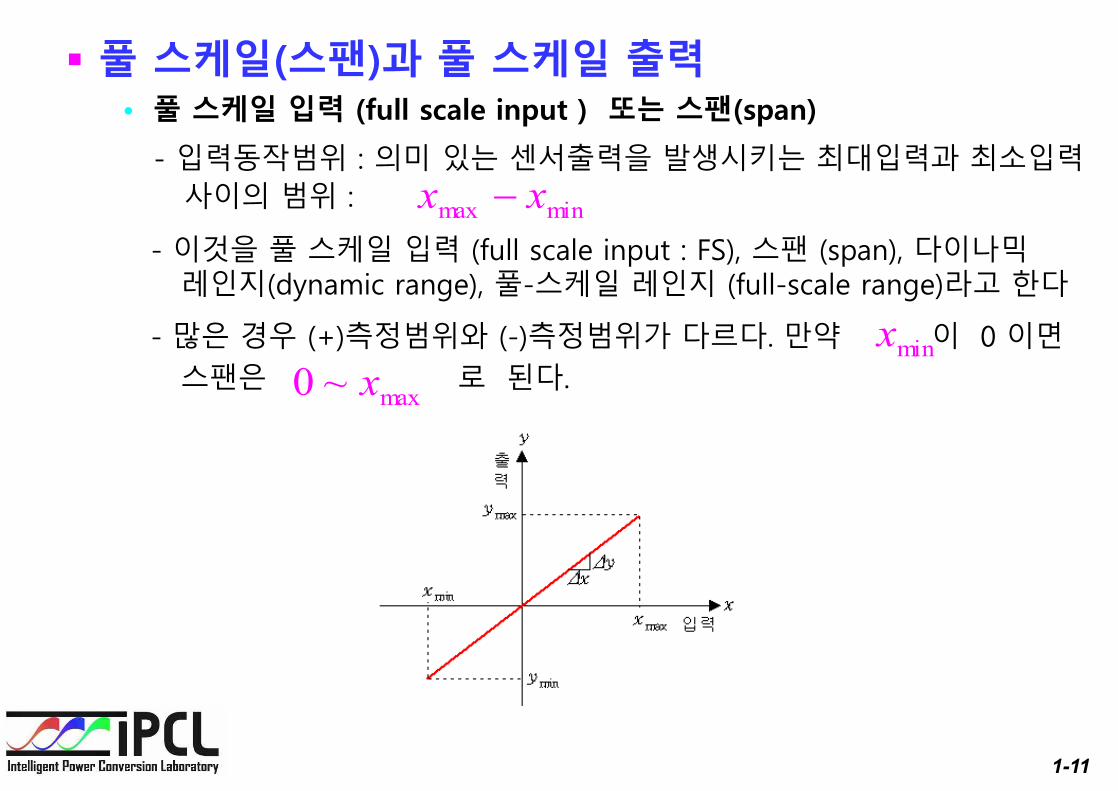
- 많은 경우 (+)측정범위와 (-)측정범위가 다르다. 만약 이 0 이면스팬은 로 된다.
§ 풀 스케일(스팬)과 풀 스케일 출력
- 입력동작범위 : 의미 있는 센서출력을 발생시키는 최대입력과 최소입력사이의 범위 :
• 풀 스케일 입력 (full scale input ) 또는 스팬(span)
minmax xx -- 이것을 풀 스케일 입력 (full scale input : FS), 스팬 (span), 다이나믹
레인지(dynamic range), 풀-스케일 레인지 (full-scale range)라고 한다.
minxmax~0 x
1-12
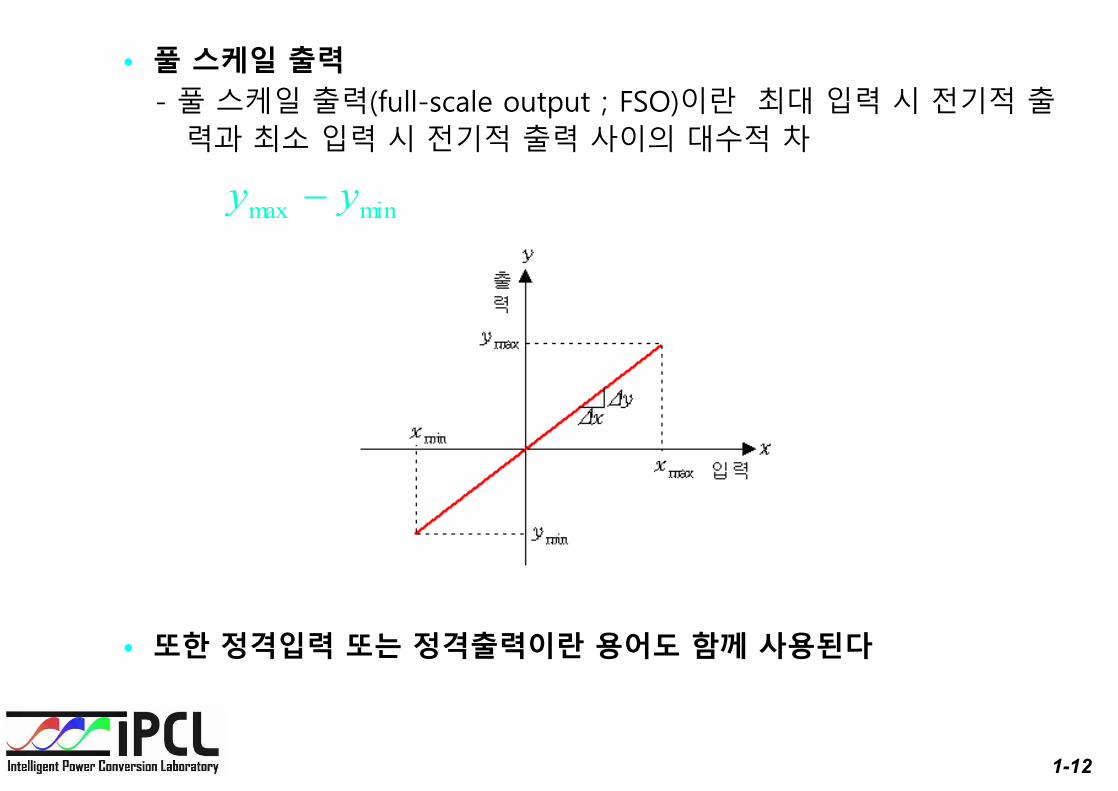
• 풀 스케일 출력- 풀 스케일 출력(full-scale output;FSO)이란 최대 입력 시 전기적 출
력과 최소 입력 시 전기적 출력 사이의 대수적 차
minmax yy -
• 또한 정격입력 또는 정격출력이란 용어도 함께 사용된다
1-13
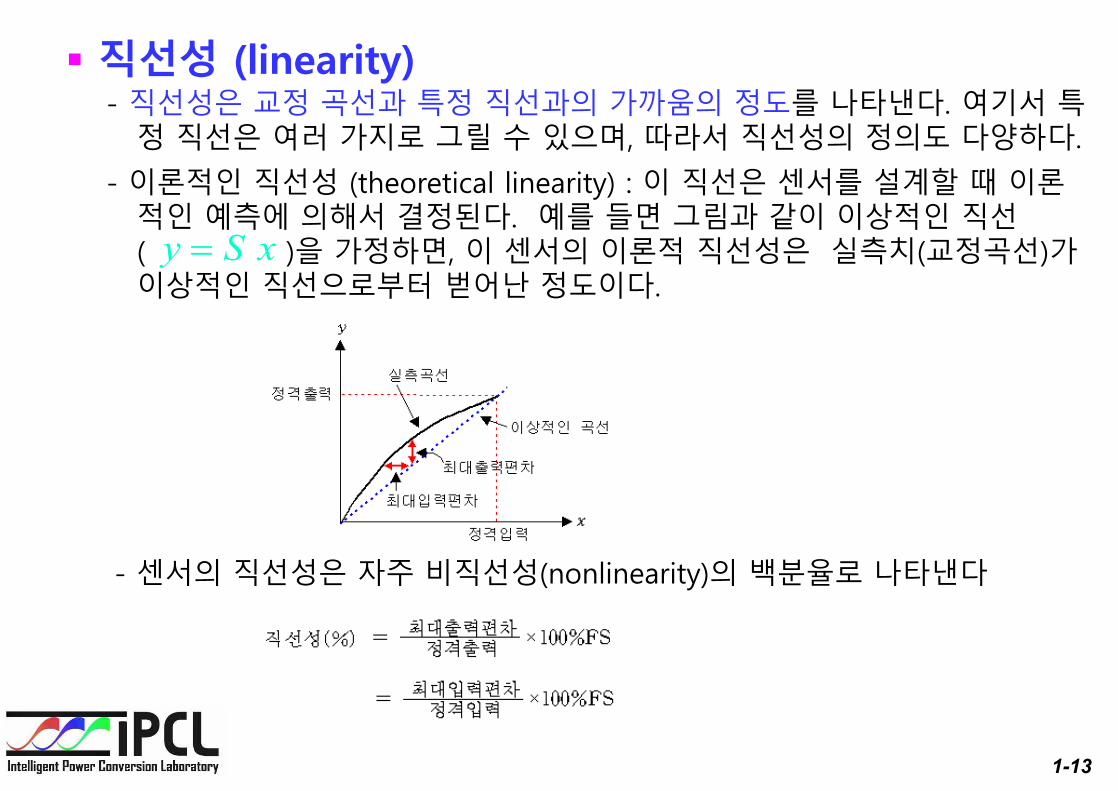
§ 직선성 (linearity)
- 이론적인 직선성 (theoretical linearity) : 이 직선은 센서를 설계할 때 이론적인 예측에 의해서 결정된다. 예를 들면 그림과 같이 이상적인 직선( )을 가정하면, 이 센서의 이론적 직선성은 실측치(교정곡선)가이상적인 직선으로부터 벋어난 정도이다.
xSy =
- 센서의 직선성은 자주 비직선성(nonlinearity)의 백분율로 나타낸다
- 직선성은 교정 곡선과 특정 직선과의 가까움의 정도를 나타낸다. 여기서 특정 직선은 여러 가지로 그릴 수 있으며, 따라서 직선성의 정의도 다양하다.
1-14
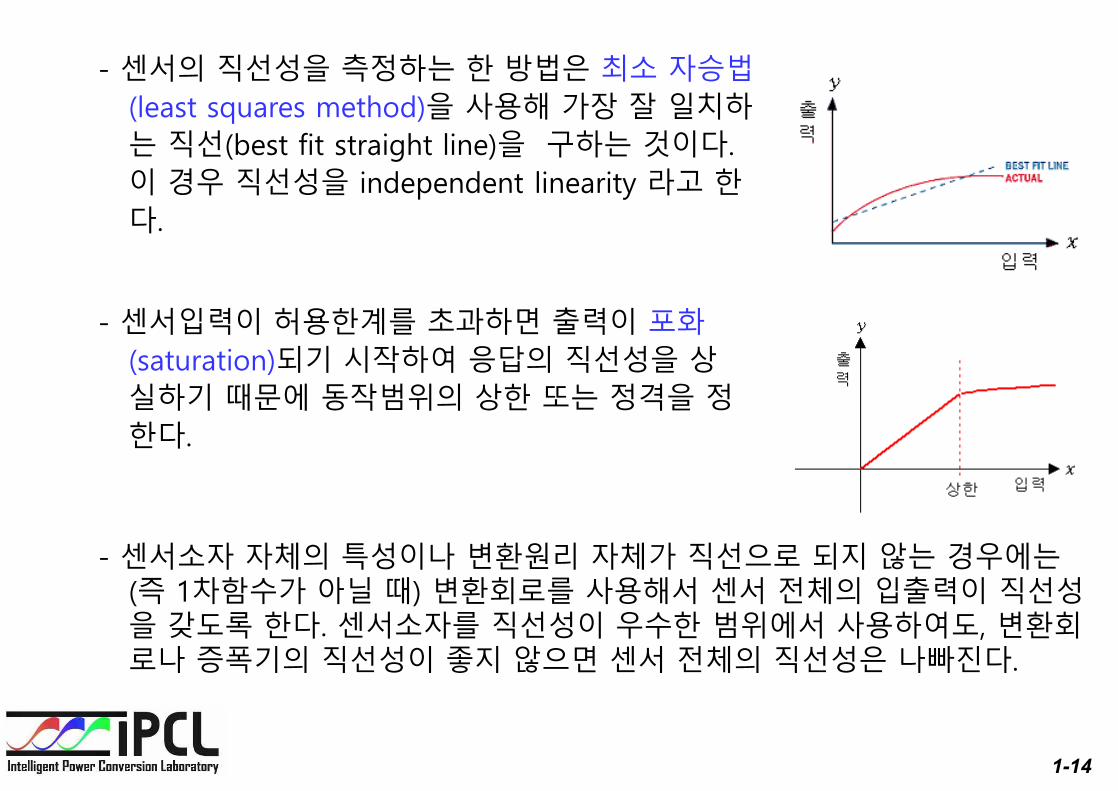
- 센서입력이 허용한계를 초과하면 출력이 포화(saturation)되기 시작하여 응답의 직선성을 상실하기 때문에 동작범위의 상한 또는 정격을 정한다.
- 센서의 직선성을 측정하는 한 방법은 최소 자승법(least squares method)을 사용해 가장 잘 일치하는 직선(best fit straight line)을 구하는 것이다. 이 경우 직선성을 independent linearity 라고 한다.
- 센서소자 자체의 특성이나 변환원리 자체가 직선으로 되지 않는 경우에는(즉 1차함수가 아닐 때) 변환회로를 사용해서 센서 전체의 입출력이 직선성을 갖도록 한다. 센서소자를 직선성이 우수한 범위에서 사용하여도, 변환회로나 증폭기의 직선성이 좋지 않으면 센서 전체의 직선성은 나빠진다.
1-15
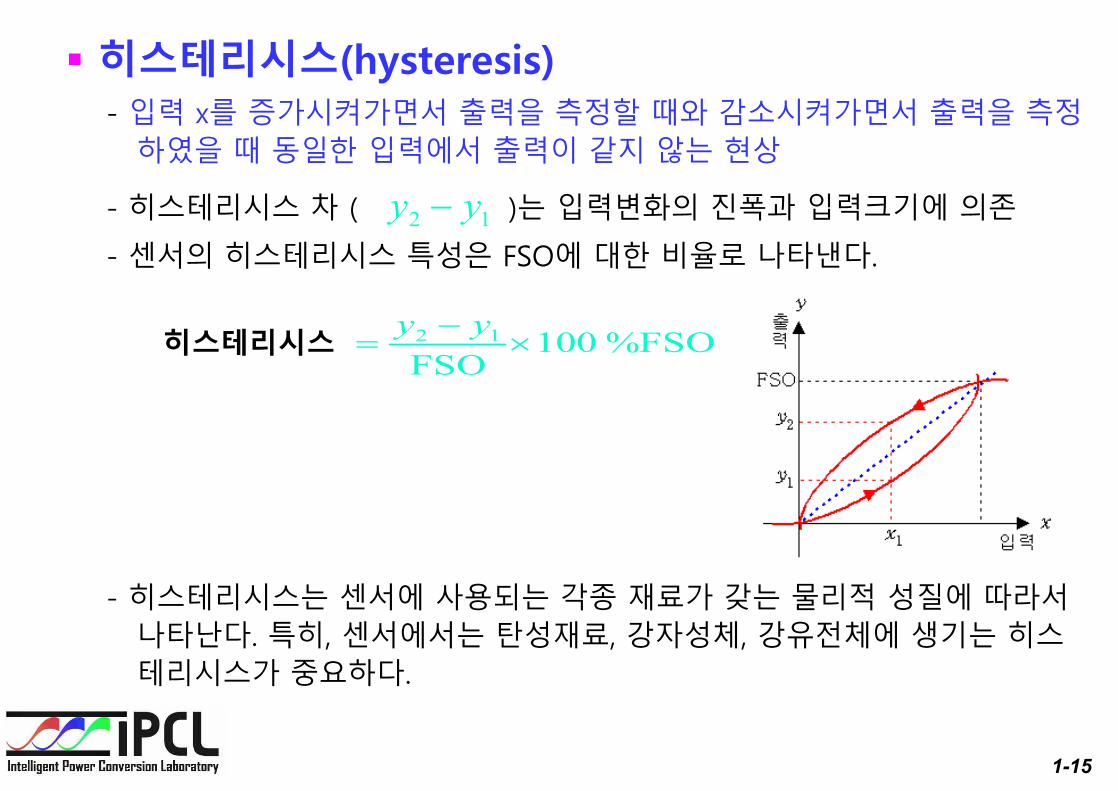
§ 히스테리시스(hysteresis)- 입력 x를 증가시켜가면서 출력을 측정할 때와 감소시켜가면서 출력을 측정
하였을 때 동일한 입력에서 출력이 같지 않는 현상
- 히스테리시스 차 ( )는 입력변화의 진폭과 입력크기에 의존12 yy -- 센서의 히스테리시스 특성은 FSO에 대한 비율로 나타낸다.
%FSO100FSO
12 ´-
=yy
히스테리시스
- 히스테리시스는 센서에 사용되는 각종 재료가 갖는 물리적 성질에 따라서나타난다. 특히, 센서에서는 탄성재료, 강자성체, 강유전체에 생기는 히스테리시스가 중요하다.
1-16
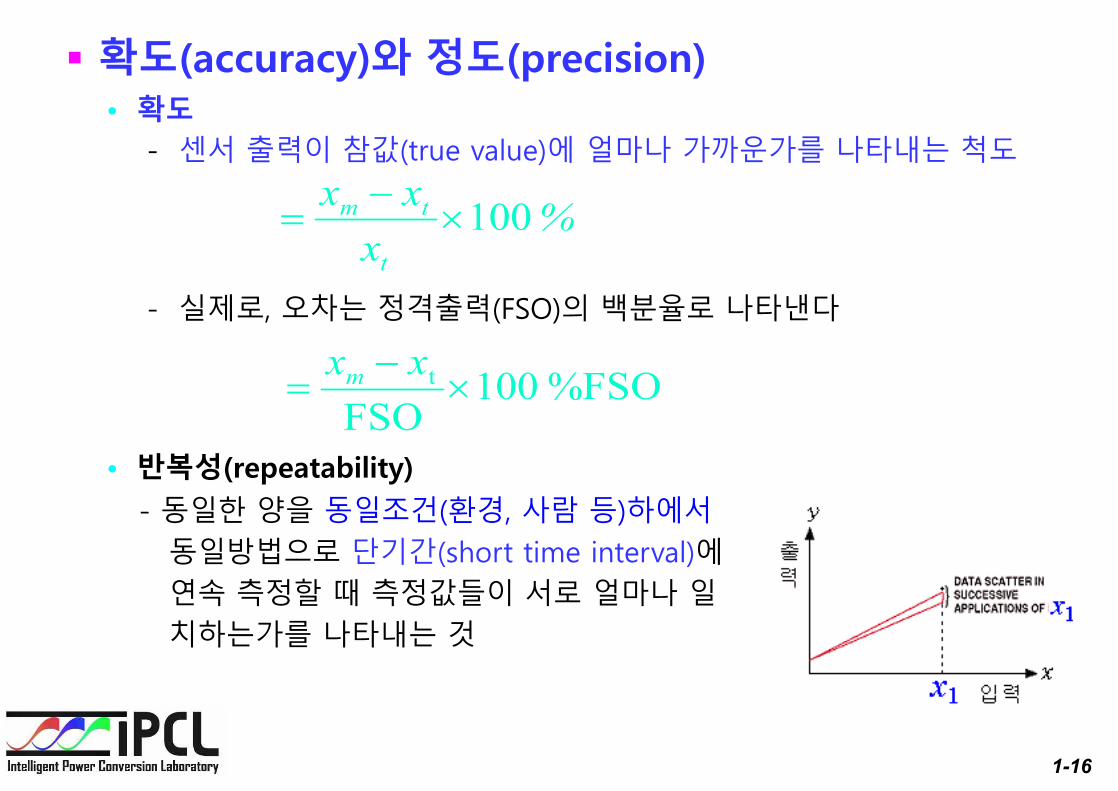
§ 확도(accuracy)와 정도(precision)
- 센서 출력이 참값(true value)에 얼마나 가까운가를 나타내는 척도• 확도
%FSO100FSO
t ´-
=xxm
오차 %xxx
t
tm 100´-
=
- 실제로, 오차는 정격출력(FSO)의 백분율로 나타낸다
오차
• 반복성(repeatability)
- 동일한 양을 동일조건(환경, 사람 등)하에서동일방법으로 단기간(short time interval)에연속 측정할 때 측정값들이 서로 얼마나 일치하는가를 나타내는 것
1-17
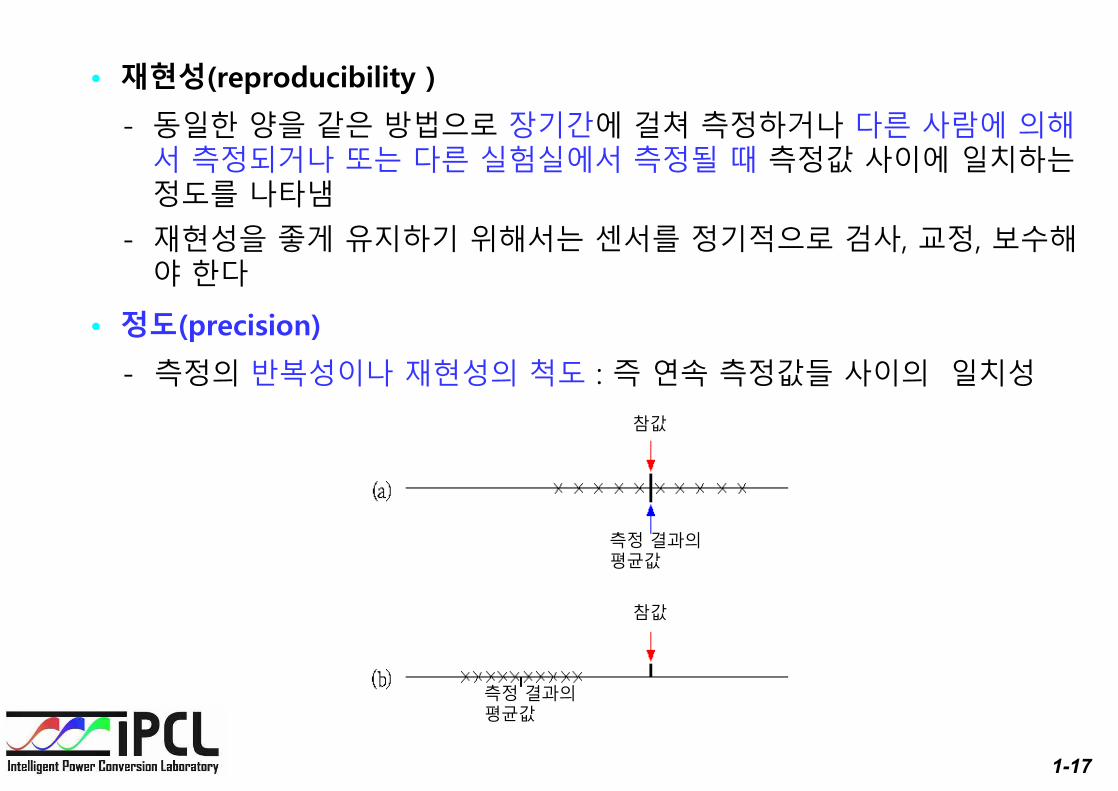
• 재현성(reproducibility )
- 동일한 양을 같은 방법으로 장기간에 걸쳐 측정하거나 다른 사람에 의해서 측정되거나 또는 다른 실험실에서 측정될 때 측정값 사이에 일치하는정도를 나타냄
- 재현성을 좋게 유지하기 위해서는 센서를 정기적으로 검사, 교정, 보수해야 한다
• 정도(precision)
- 측정의 반복성이나 재현성의 척도 : 즉 연속 측정값들 사이의 일치성
참값
측정 결과의평균값
측정 결과의평균값
참값
1-18
- 센서에 입력되는 여러 변수 중에서 원하는 변수만을 선택적으로 검출하는성질.
- 센서는 원하는 물리(화학)현상만을 검출하고, 다른 현상의 영향을 받지 않는 것이 바람직하다.
- 일반적으로 대부분의 센서는 온도나 습도의 영향을 받기 때문에, 센서 구조를 변경하거나 전자회로로 보상하여 센서의 선택성을 향상시키기도 하고, 또는 습도센서와 가스센서 등에서처럼 특정한 화학물질에 의해 선택성을 실현하기도 한다.
§ 선택성(selectivity)
1-19
- 잡음(雜音;noise)이란 원하지 않는 불규칙한 신호
- 센서소자나 변환회로로부터 불규칙적으로 변동하는 작음이 발생한다. 잡음은 원리적으로 제거할 수 없는 것이 있으며, 또한 전원의 리플(ripple)이나 진동 등 환경의 변동에 의한 것도 포함된다
- 센서의 입력변화에 대한 응답이 잡음레벨 이하로 되면 오차가 발생한다. 센서의 감도가 높으면, 미소입력신호도 검지할 수 있다
- 센서에 유입되는 잡음이 증대되면, 감도가 높더라도 미소입력신호의 검출이 불가능해져 측정 하한치는 크게 된다.
- 그러므로, 센서의 신호 대 잡음비(signal to noise ratio;S/N ratio)를 향상시킴으로써 검출 하한치를 작게 할 수 있다.
- 신호 대 잡음비를 개선하기 위해서는 필터(filter)등을 사용한다.
§ 잡음 (Noise)
1-20
§ 분해능 (resolution)- 검출할 수 있는 최소입력 증분(smallest increment) 또는 최소입력변화.
- 분해능을 제한하는 원인ü 입력의 변화분이 센서내부에서 흡수되어 출력으로 나타나지 않는 경우ü 센서내부에서 발생하는 잡음(noise)
- 분해능은 작을수록 좋다.
ü 아날로그 센서(analog sensor)에서는 0.1%/FS 정도ü 디지털 센서(digital sensor)에서는 비트(bit)로 정해진다.
예를 들면, 12 bit의 경우 분해능 :
0.024%FS40951
2112 ==
1-21
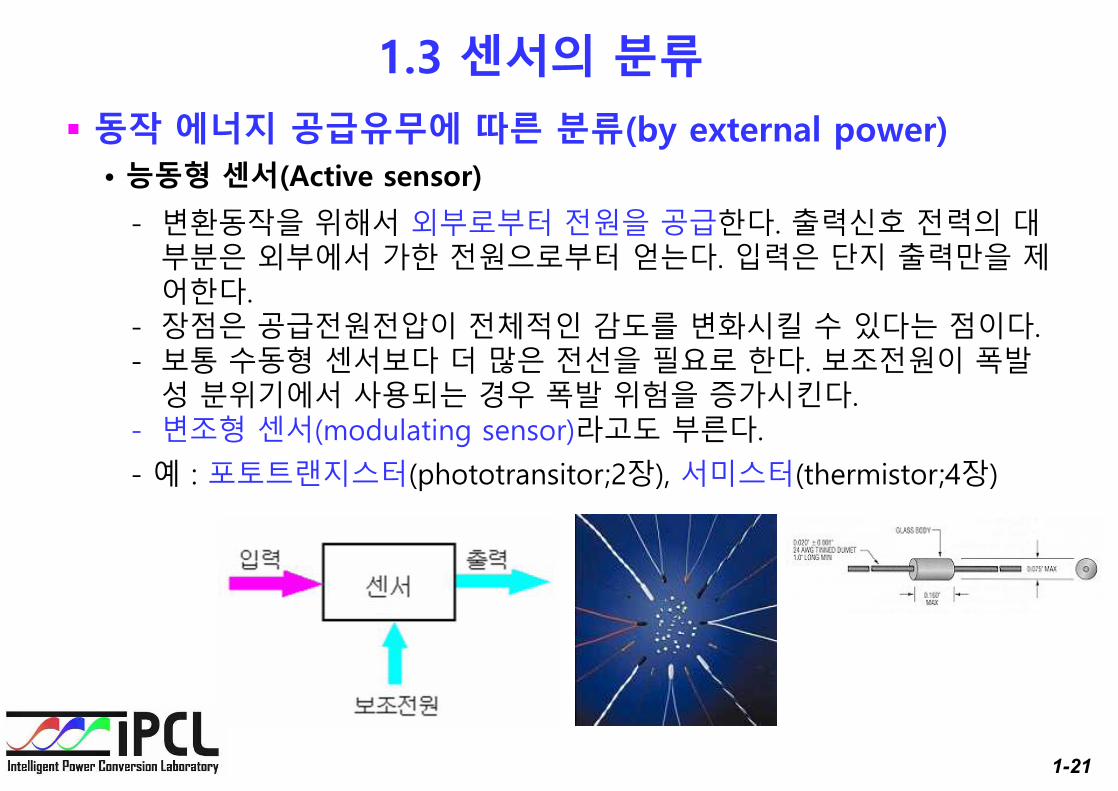
§ 동작 에너지 공급유무에 따른 분류(by external power)• 능동형 센서(Active sensor)
Thermistor
1.3 센서의 분류
- 변환동작을 위해서 외부로부터 전원을 공급한다. 출력신호 전력의 대부분은 외부에서 가한 전원으로부터 얻는다. 입력은 단지 출력만을 제어한다.
- 장점은 공급전원전압이 전체적인 감도를 변화시킬 수 있다는 점이다.- 보통 수동형 센서보다 더 많은 전선을 필요로 한다. 보조전원이 폭발
성 분위기에서 사용되는 경우 폭발 위험을 증가시킨다. - 변조형 센서(modulating sensor)라고도 부른다.
- 예 : 포토트랜지스터(phototransitor;2장), 서미스터(thermistor;4장)
1-22
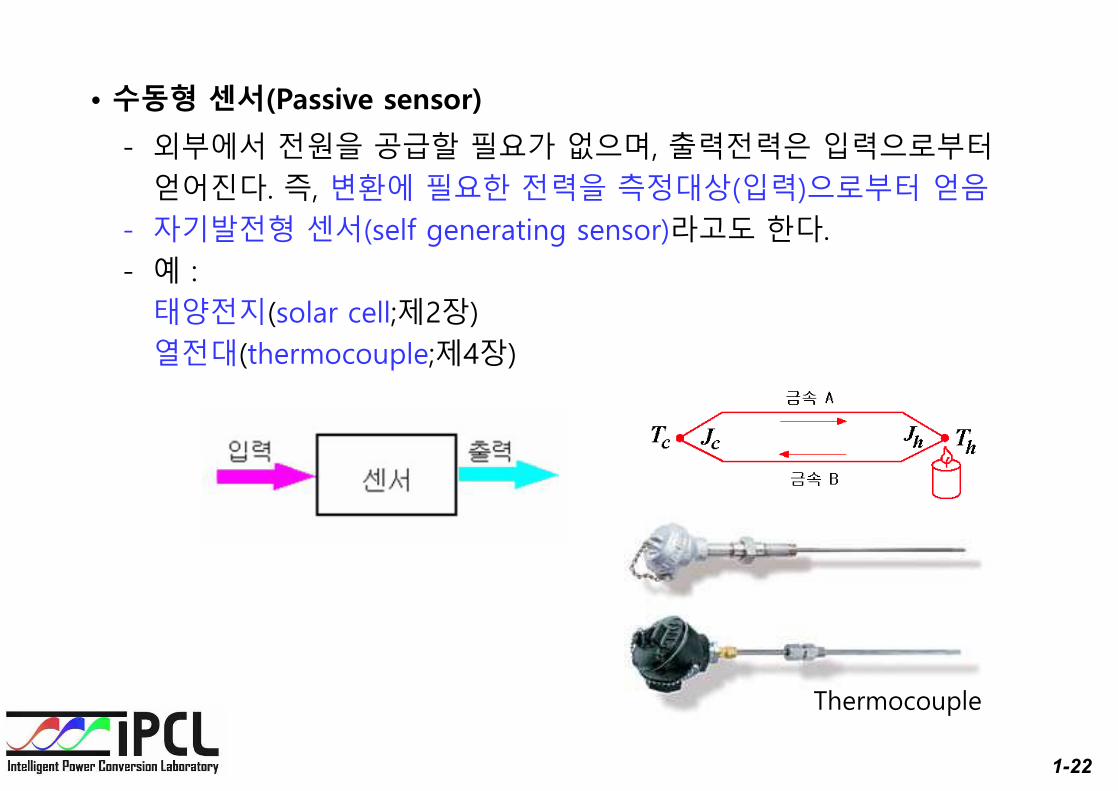
• 수동형 센서(Passive sensor)
Thermocouple
- 외부에서 전원을 공급할 필요가 없으며, 출력전력은 입력으로부터얻어진다. 즉, 변환에 필요한 전력을 측정대상(입력)으로부터 얻음
- 자기발전형 센서(self generating sensor)라고도 한다.- 예 :
태양전지(solar cell;제2장)열전대(thermocouple;제4장)
1-23
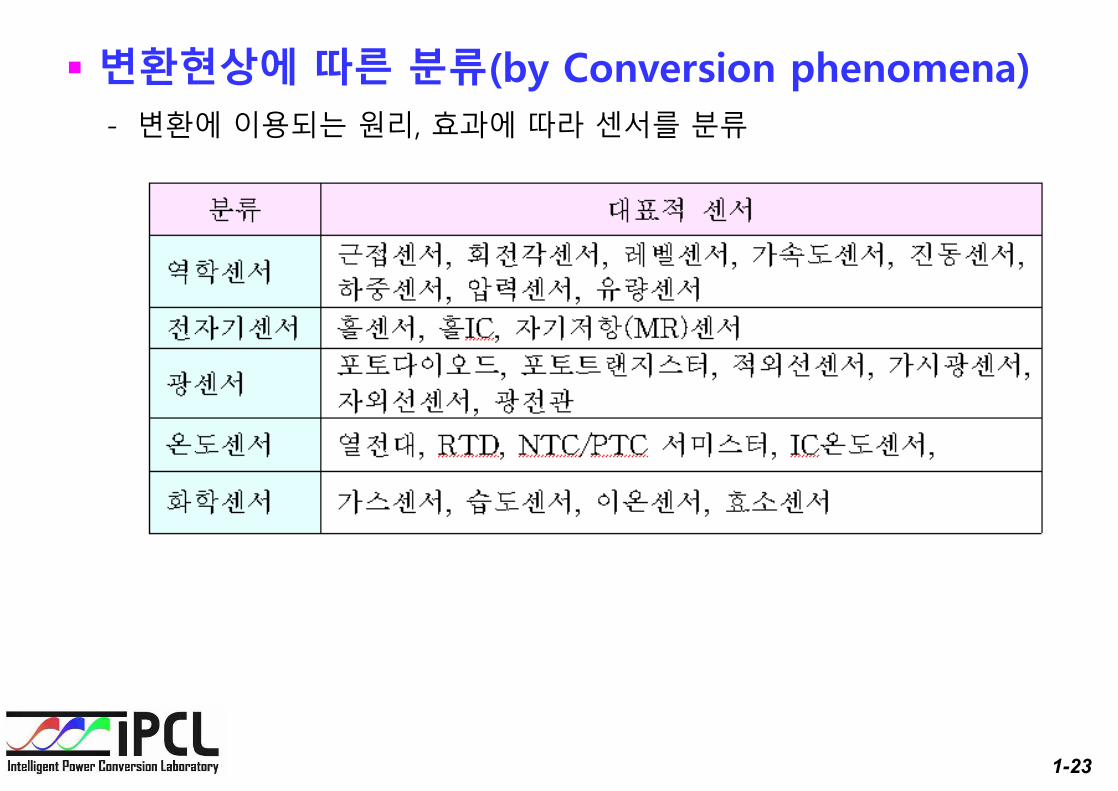
§ 변환현상에 따른 분류(by Conversion phenomena)- 변환에 이용되는 원리, 효과에 따라 센서를 분류
1-24
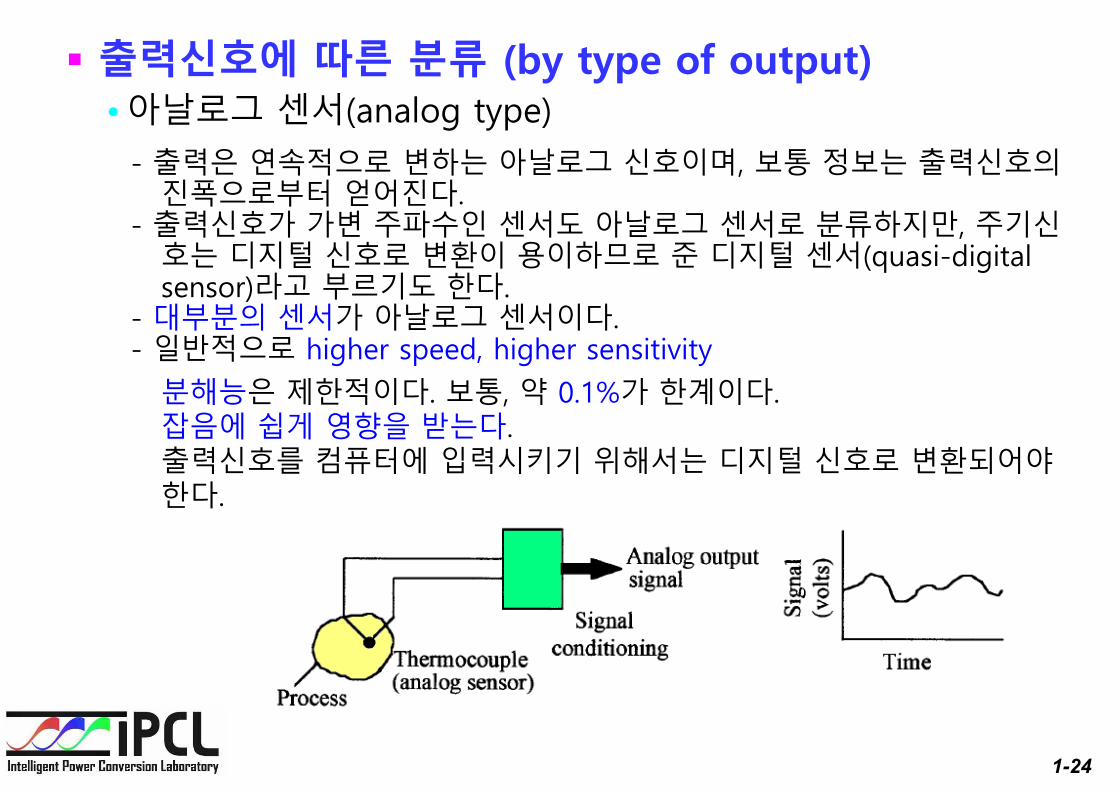
• 아날로그 센서(analog type)- 출력은 연속적으로 변하는 아날로그 신호이며, 보통 정보는 출력신호의
진폭으로부터 얻어진다. - 출력신호가 가변 주파수인 센서도 아날로그 센서로 분류하지만, 주기신
호는 디지털 신호로 변환이 용이하므로 준 디지털 센서(quasi-digital sensor)라고 부르기도 한다.
- 대부분의 센서가 아날로그 센서이다. - 일반적으로 higher speed, higher sensitivity
- 분해능은 제한적이다. 보통, 약 0.1%가 한계이다. - 잡음에 쉽게 영향을 받는다. - 출력신호를 컴퓨터에 입력시키기 위해서는 디지털 신호로 변환되어야
한다.
§ 출력신호에 따른 분류 (by type of output)
1-25
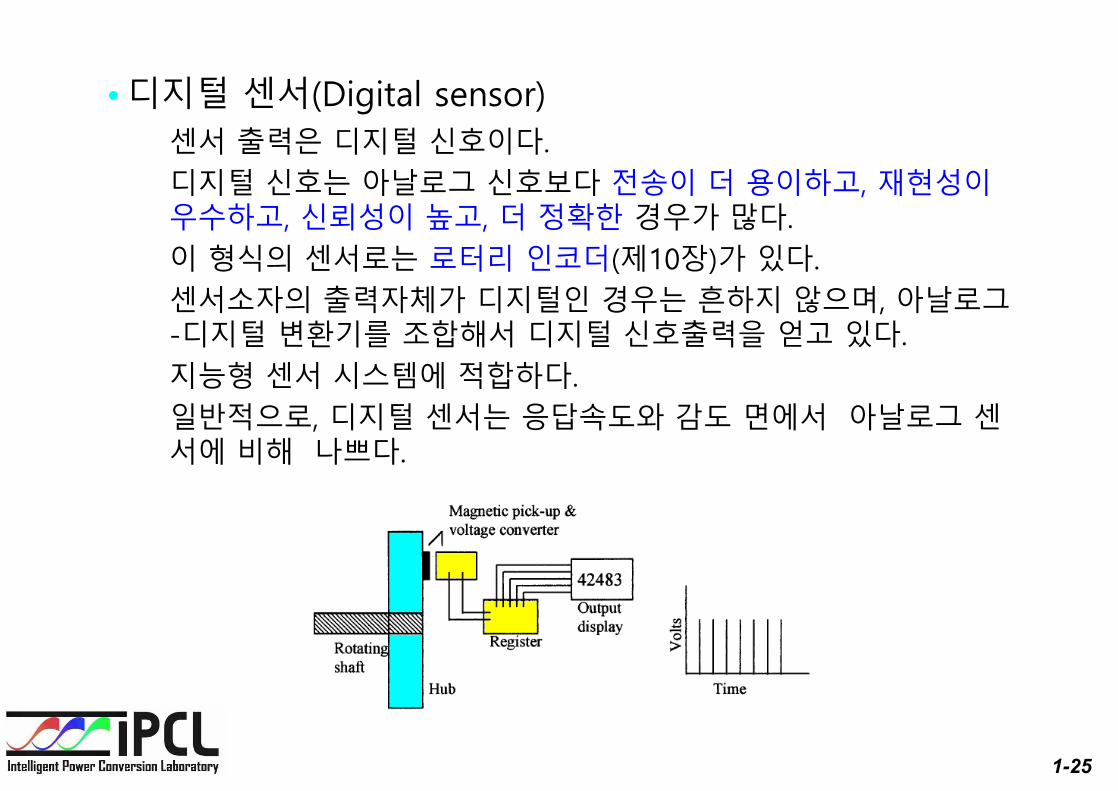
• 디지털 센서(Digital sensor)- 센서 출력은 디지털 신호이다. - 디지털 신호는 아날로그 신호보다 전송이 더 용이하고, 재현성이
우수하고, 신뢰성이 높고, 더 정확한 경우가 많다. - 이 형식의 센서로는 로터리 인코더(제10장)가 있다. - 센서소자의 출력자체가 디지털인 경우는 흔하지 않으며, 아날로그
-디지털 변환기를 조합해서 디지털 신호출력을 얻고 있다.- 지능형 센서 시스템에 적합하다.- 일반적으로, 디지털 센서는 응답속도와 감도 면에서 아날로그 센
서에 비해 나쁘다.
1-26
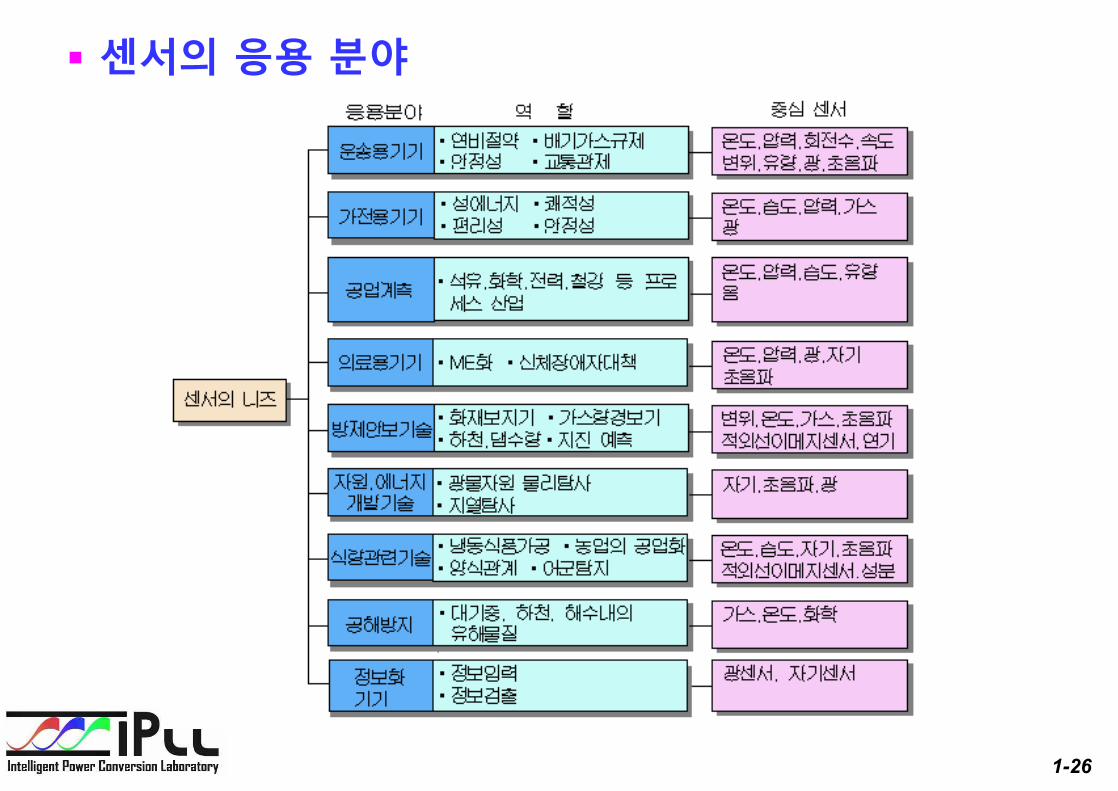
§ 센서의 응용 분야
1-27
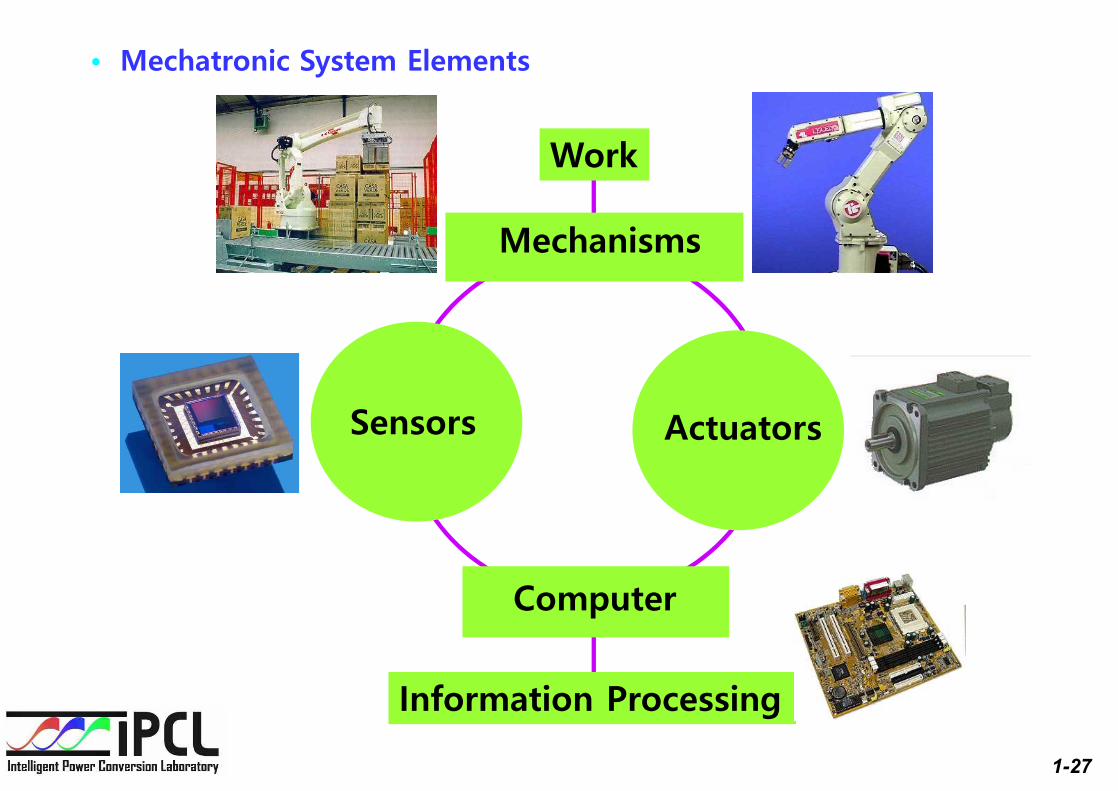
Sensors Actuators
Computer
Mechanisms
Work
Information Processing
• Mechatronic System Elements
1-28
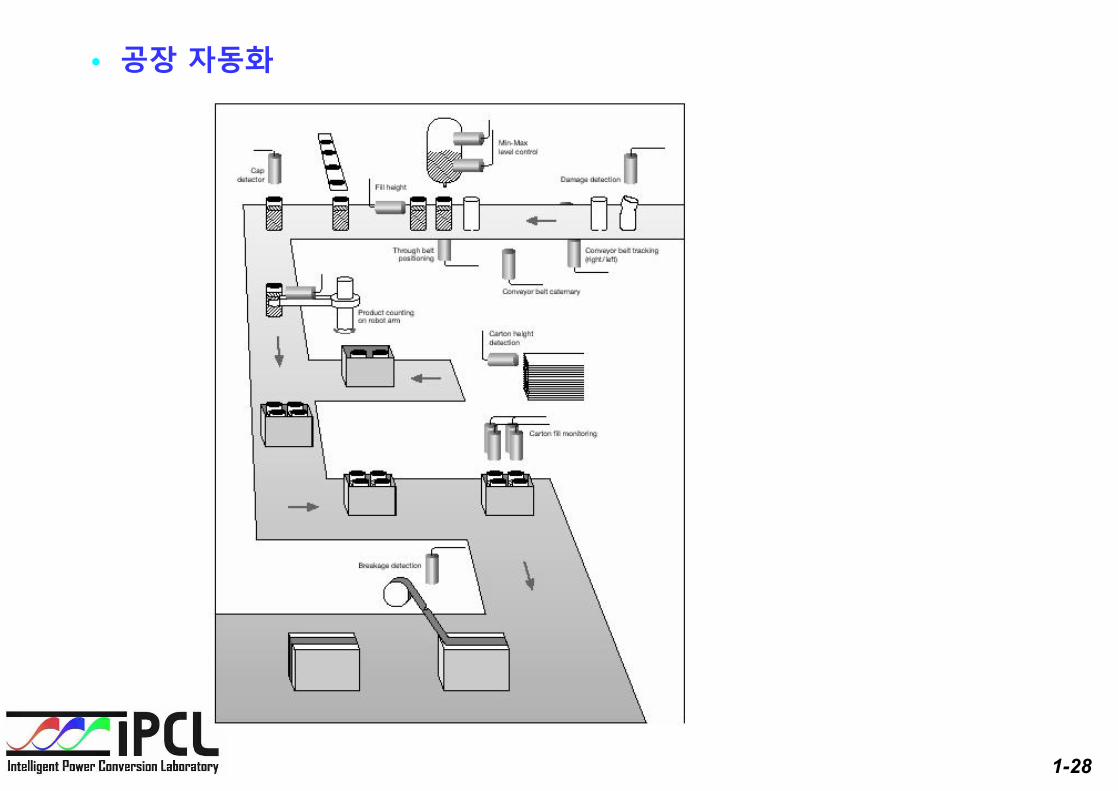
• 공장 자동화
1-29
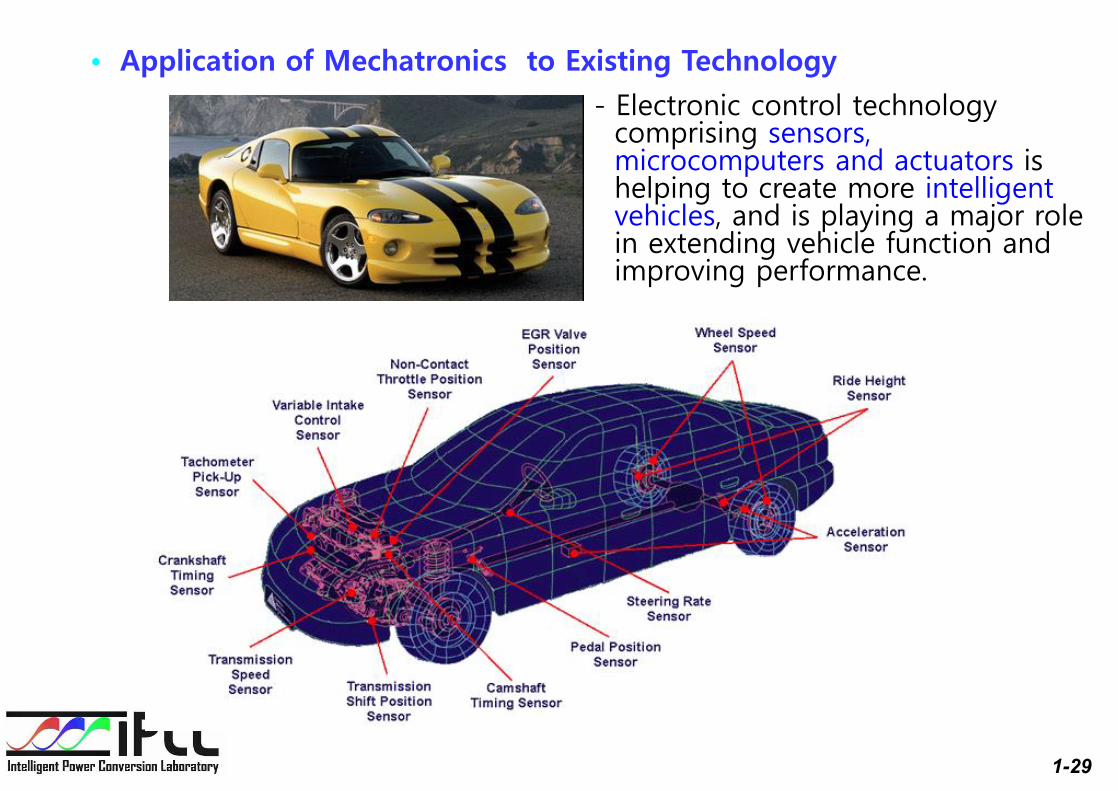
• Application of Mechatronics to Existing Technology
- Electronic control technology comprising sensors, microcomputers and actuators is helping to create more intelligent vehicles, and is playing a major role in extending vehicle function and improving performance.
1-30
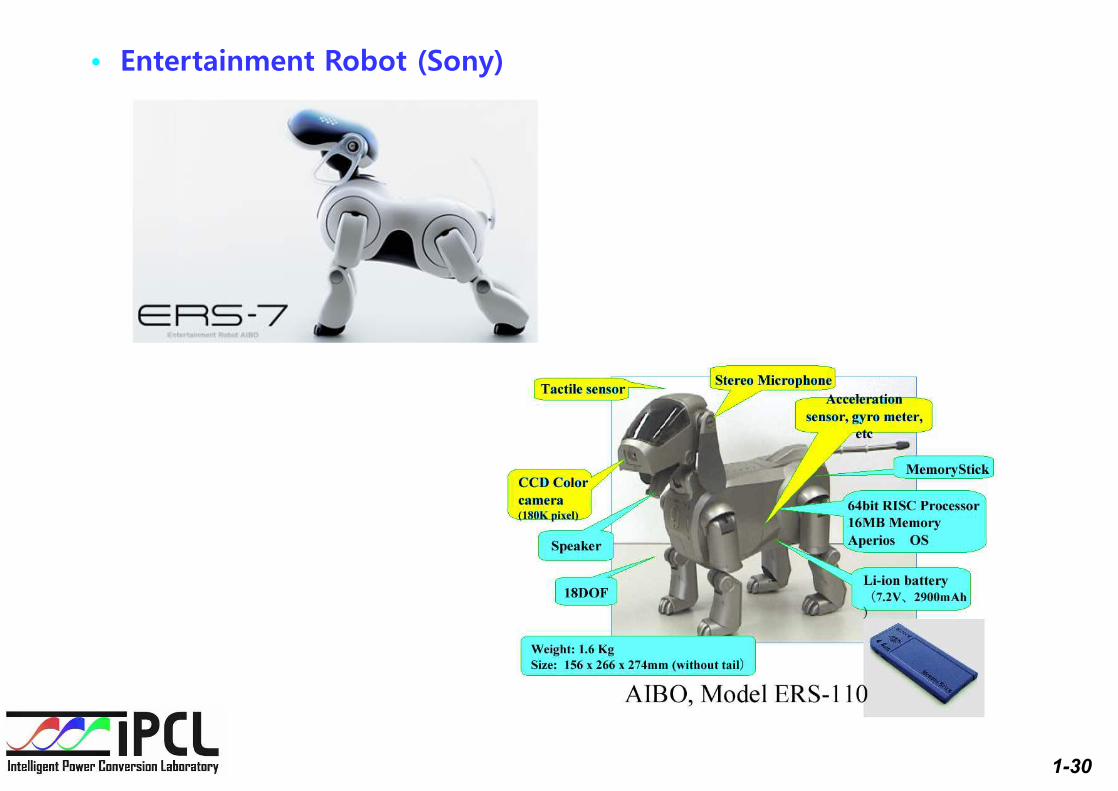
• Entertainment Robot (Sony)
1-31
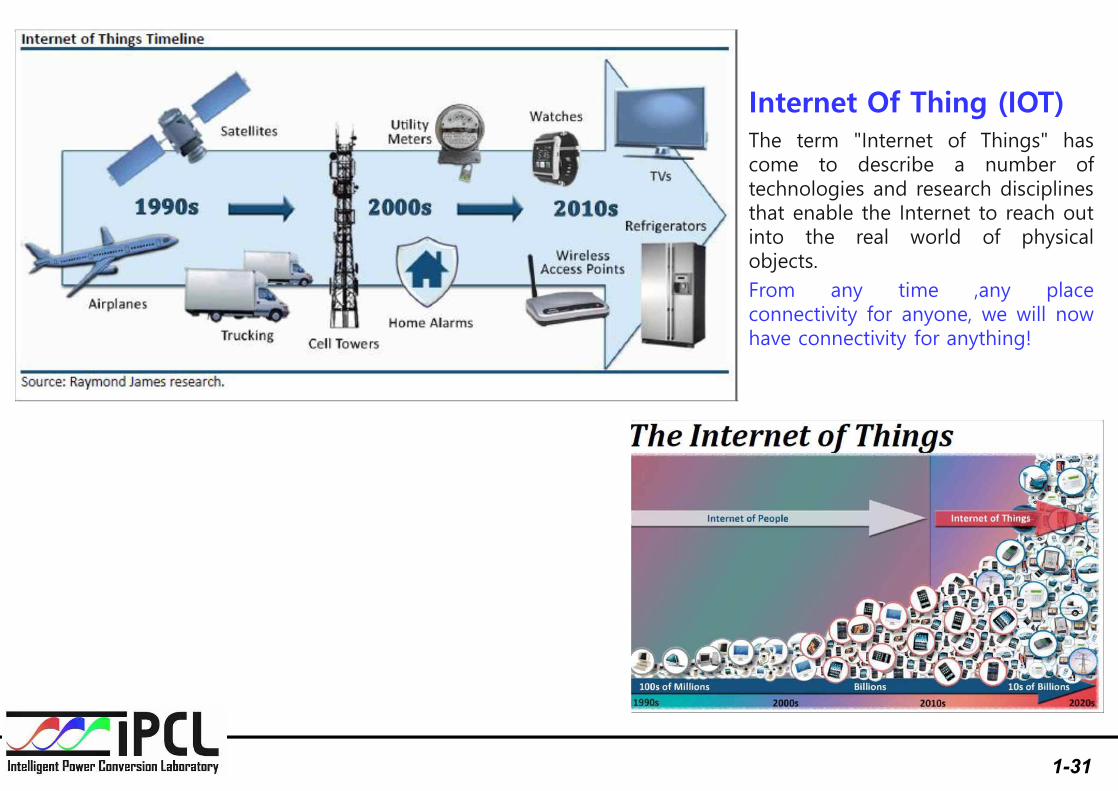
Internet Of Thing (IOT)The term "Internet of Things" hascome to describe a number oftechnologies and research disciplinesthat enable the Internet to reach outinto the real world of physicalobjects.From any time ,any placeconnectivity for anyone, we will nowhave connectivity for anything!
1-32
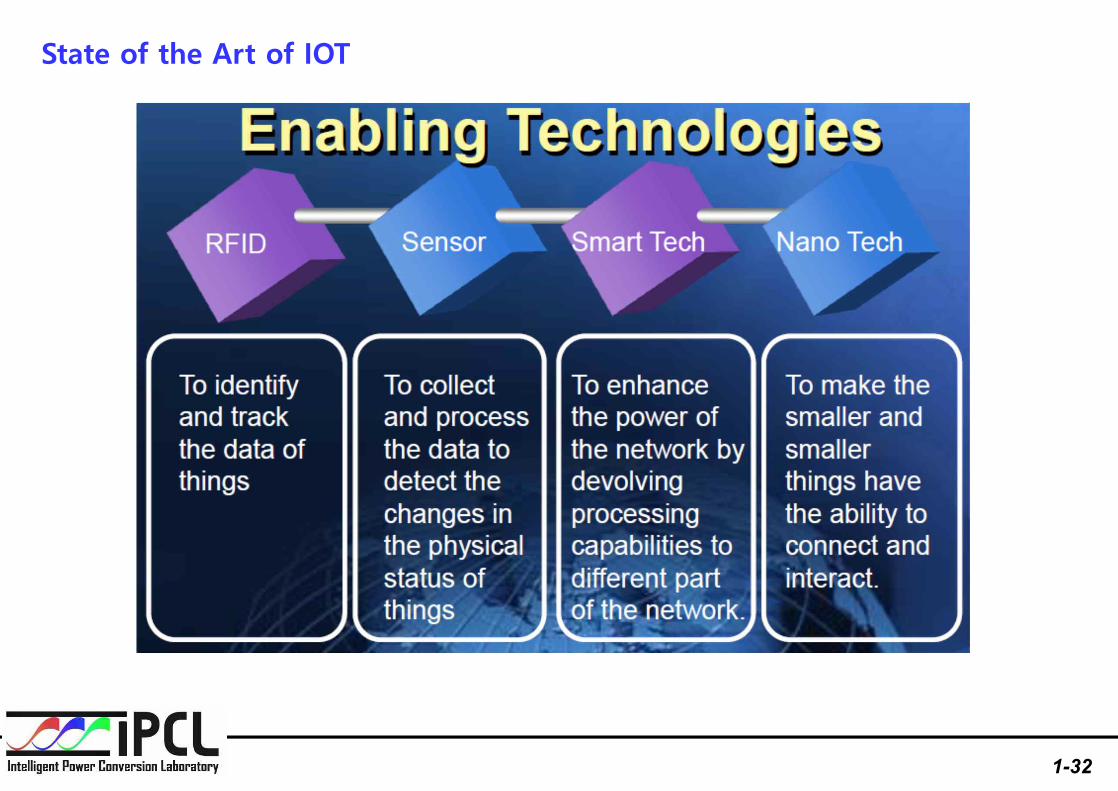
State of the Art of IOT
1-33
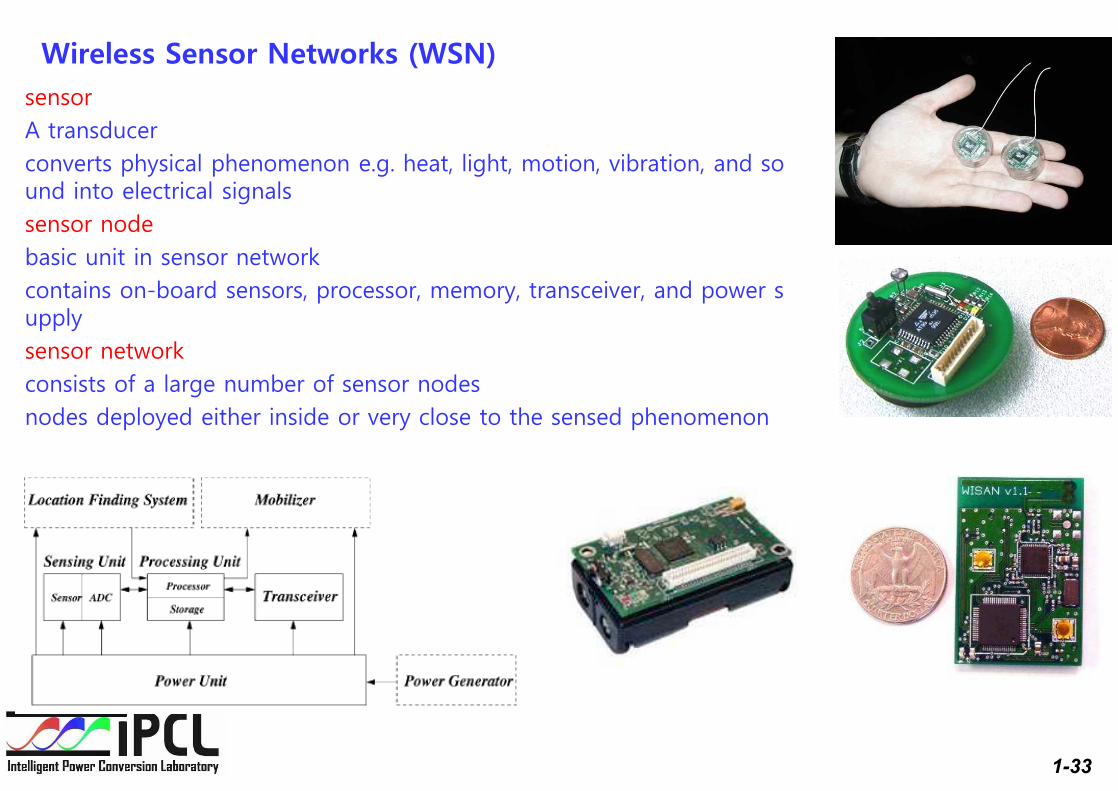
Wireless Sensor Networks (WSN) sensorA transducerconverts physical phenomenon e.g. heat, light, motion, vibration, and sound into electrical signalssensor nodebasic unit in sensor networkcontains on-board sensors, processor, memory, transceiver, and power supplysensor networkconsists of a large number of sensor nodes nodes deployed either inside or very close to the sensed phenomenon
1-34
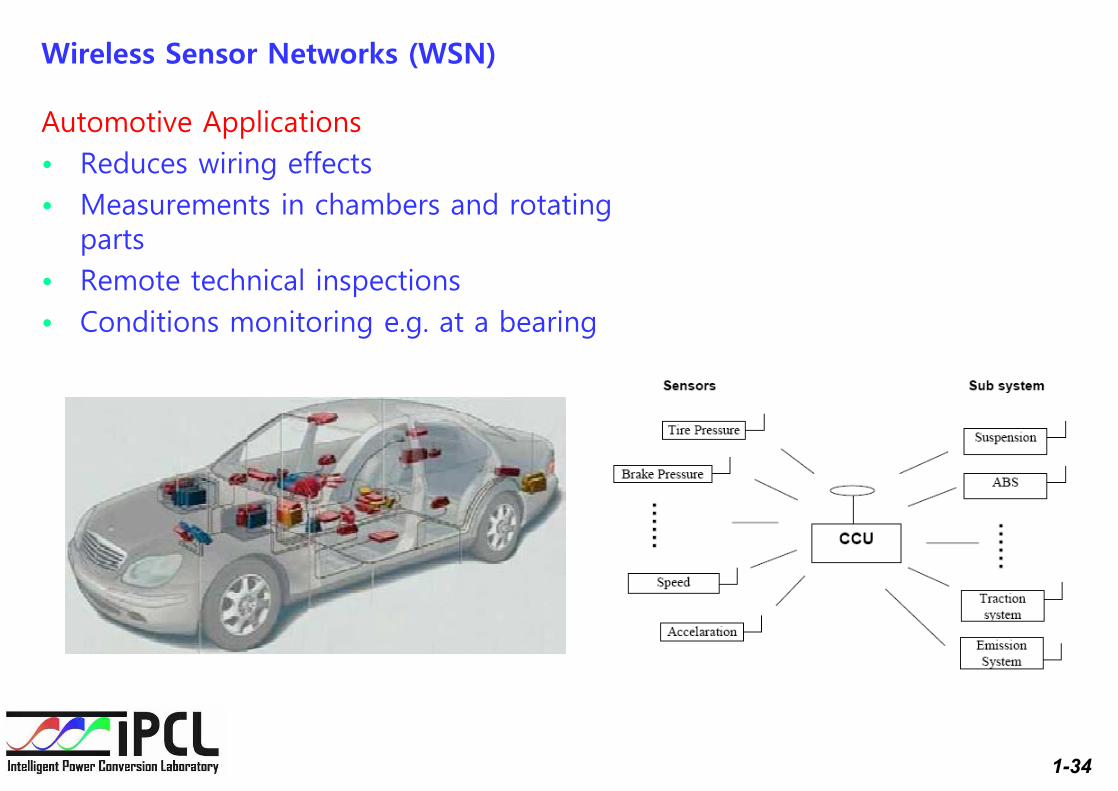
Wireless Sensor Networks (WSN)
Automotive Applications• Reduces wiring effects• Measurements in chambers and rotating
parts• Remote technical inspections• Conditions monitoring e.g. at a bearing
Sensor System Design
- 조편성(3인 1조)- ATmega128F 교육용 키드 소개- C 언어 개요- AVR-studio 소개- 실습보드를 컴퓨터와 연결하여 소스를 컴파일하고 다운로드하는과정 수행