AA 断面図 - Kobe...別図4(第2章第2節第8-1の(1)関係)採水口設備(KY-Ⅱ型)構造図(参考例) 正面図 断面図 平面図 定石 量水標示板

確率ロボティクス
Sebastian Thrun (著), Wolfram Burgard (著), Dieter Fox (著), 上田 隆一 (翻訳) 2007.
参考図書
国友 直人(監修), 山本 拓 (監修), 北川 源四郎(編), 竹村 彰通(編), 2008.
21世紀の統計学IIISequential MonteCarlo Methods inPractice
Arnaud Doucet (Ed.),Nando de Freitas (Ed.),Neil Gordon (Ed.), 2000.
10.1 パーティクルフィルタを学ぶための参考図書
第10回 確率システム制御特論
データ同化入門―次世代のシミュレーション技術―樋口知之 編著,朝倉書店,2011.
10.2 パーティクルフィルタの種類
第10回 確率システム制御特論
モンテカルロフィルタ(G.Kitagawa, 1992)
ブートストラップフィルタ(N.Gordon, 1993)
CONDENSATION(M.Isard & A.Blake動画像追跡に利用)
モンテカルロローカリゼーション(S.Thrun etc.自律移動ロボットに利用)
パーティクルフィルタ(粒子フィルタ)は多数の粒子により最適フィルタ問題を解く手法の総称
パーティクルフィルタ
材料 動画像における対象物の状態推定
移動ロボットの状態推定
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
4/36
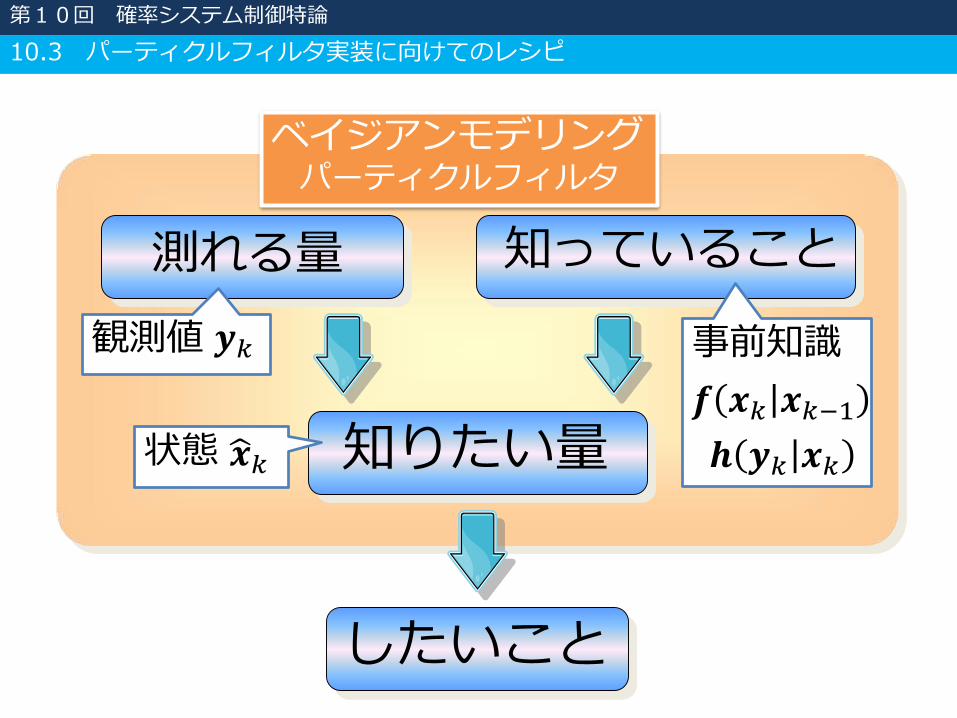
ベイジアンモデリングパーティクルフィルタ
したいこと
測れる量 知っていること
知りたい量
観測値
状態
事前知識
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
𝒚𝑘
𝒙𝑘
𝒇 𝒙𝑘 𝒙𝑘−1
𝒉 𝒚𝑘 𝒙𝑘
ろ波
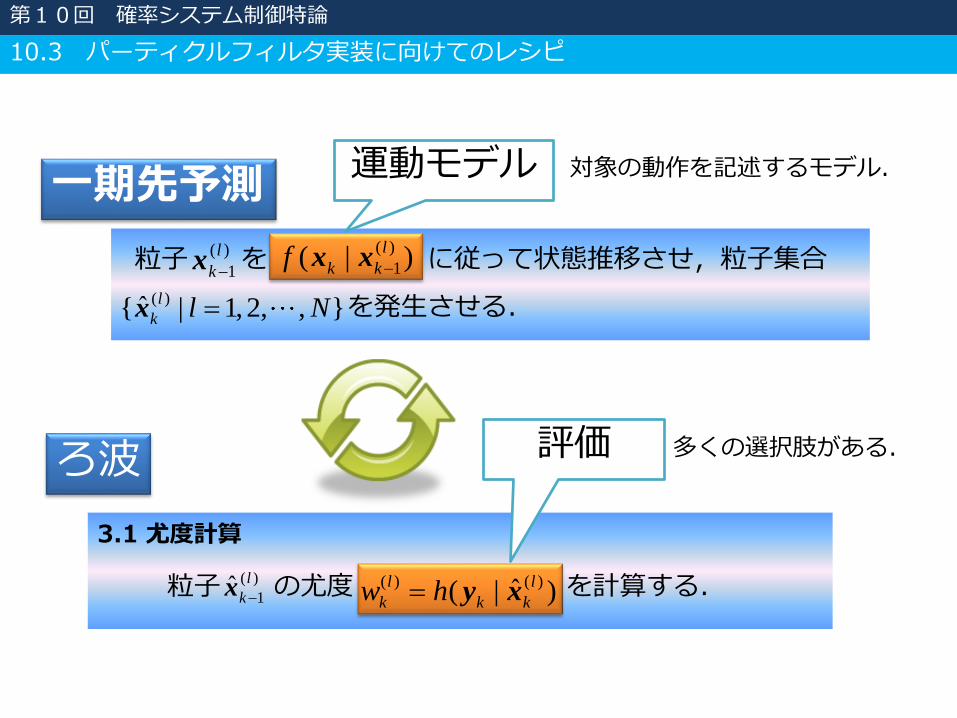
対象の動作を記述するモデル.
評価 多くの選択肢がある.
一期先予測
粒子 を に従って状態推移させ,粒子集合
を発生させる.( )ˆ{ | 1, 2, , }l
k l Nx
( )
1
l
kx( )
1( | )l
k kf x x
運動モデル
3.1 尤度計算
粒子 の尤度 を計算する.( )
1ˆ l
kx ( ) ( )ˆ( | )l l
k k kw h y x
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

知りたい量(隠れ変数):状態ベクトル
位置 位置+回転角度
1k
k
位置+回転角度+大きさ
1k
k
( , )T
k k kx yx ( , , )T
k k k kx y x ( , , , )T
k k k k kx y sx
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
𝒙𝑘
𝑘 − 1𝑘

測れる量(観測値):画像特徴量ky
色(濃淡)パターン 特徴点位置 ヒストグラム
, ,, ,T
k x y x m y nf f y 1 1, , , ,T
k m mx y x yy 1 1 1, , , ,m m m
T
k R G B R G Bh hy
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

知っていること:運動モデル1( | )k kf x x
ベイズ推定の立場:状態を確率変数として扱う
「物体の真の位置は,直接観測できないとはいえ,あらかじめ唯一に決まっているはずだ!」
ベイズ統計以外の立場ベイズ推定の立場
「ここらへんにあるだろう」物体の位置を
確率変数として扱う
したがって
パーティクルフィルタの出力は確率分布
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

最も簡単な運動モデル1k k k x x v
確率的な変動項(ガウス分布が典型的)
1( | )k kf x x
システム雑音とも呼ばれるが雑音というよりも,状態を駆動(変化)させる項として働く
知っていること:運動モデル1( | )k kf x x
1kx
kv
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
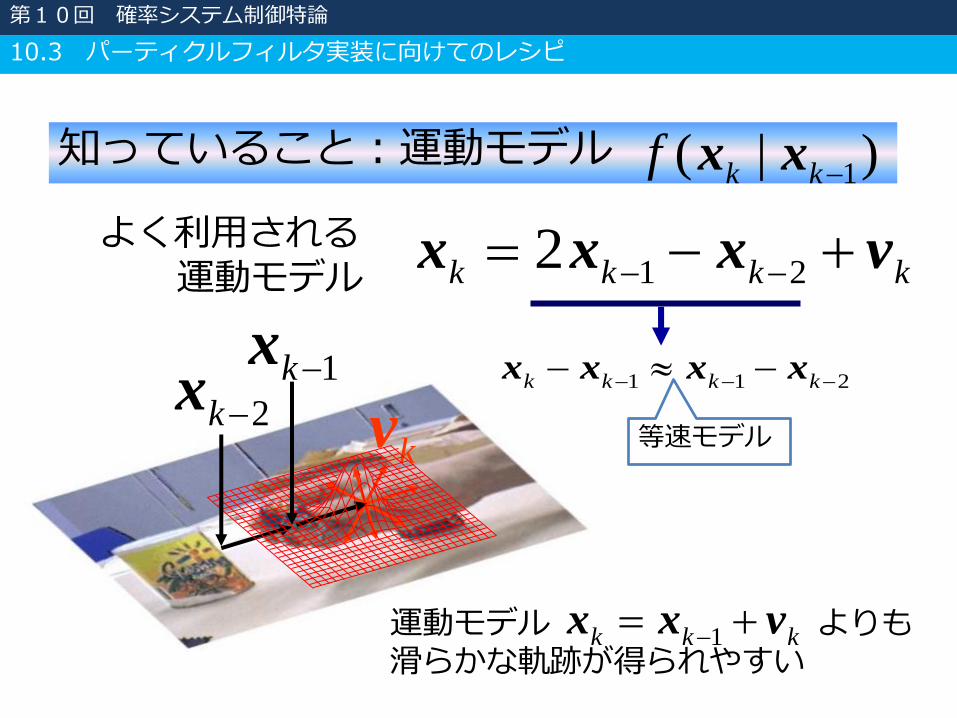
kv 等速モデル
よく利用される運動モデル 1 22k k k k x x x v
1 1 2k k k k x x x x
1k k k x x v運動モデル よりも滑らかな軌跡が得られやすい
知っていること:運動モデル1( | )k kf x x
2kx1kx
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
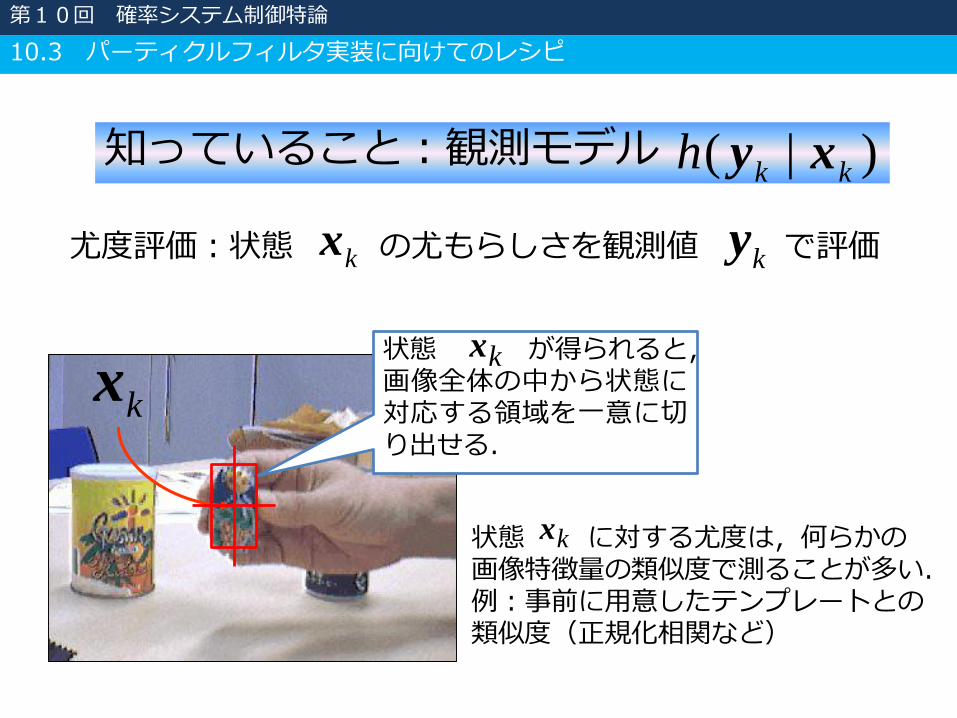
kx
尤度評価:状態 の尤もらしさを観測値 で評価kxky
状態 が得られると,画像全体の中から状態に対応する領域を一意に切り出せる.
kx
状態 に対する尤度は,何らかの画像特徴量の類似度で測ることが多い.例:事前に用意したテンプレートとの類似度(正規化相関など)
kx
知っていること:観測モデル ( | )k kh y x
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

類似度類似度
尤度
( | )k kh y x 類似度
例1:
尤度
2
2( | ) expk kh
y x類似度例2:
知っていること:観測モデル ( | )k kh y x
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
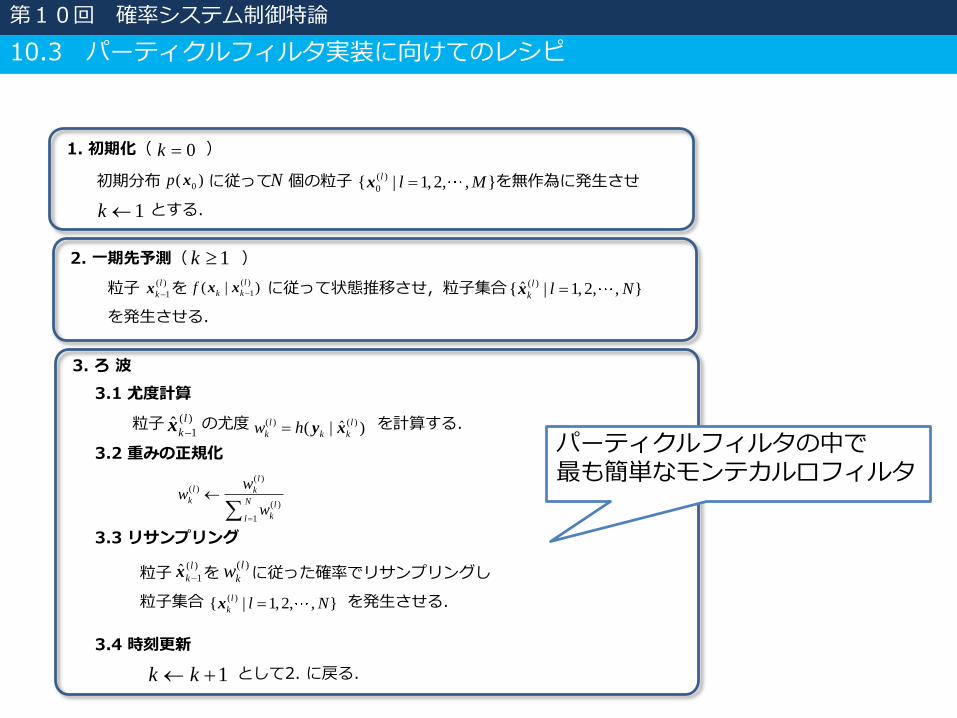
1. 初期化( )
初期分布 に従って 個の粒子 を無作為に発生させ
とする.
0k
0( )p x N ( )
0{ | 1, 2, , }l
l Mx
1k
2. 一期先予測( )1k
粒子 を に従って状態推移させ,粒子集合
を発生させる.
( )ˆ{ | 1, 2, , }l
k l Nx( )
1
l
kx( )
1( | )l
k kf x x
3. ろ 波
3.1 尤度計算
粒子 の尤度 を計算する.( )
1ˆ l
kx ( ) ( )ˆ( | )l l
k k kw h y x
3.2 重みの正規化
( )
( )
( )
1
l
l k
k N l
kl
ww
w
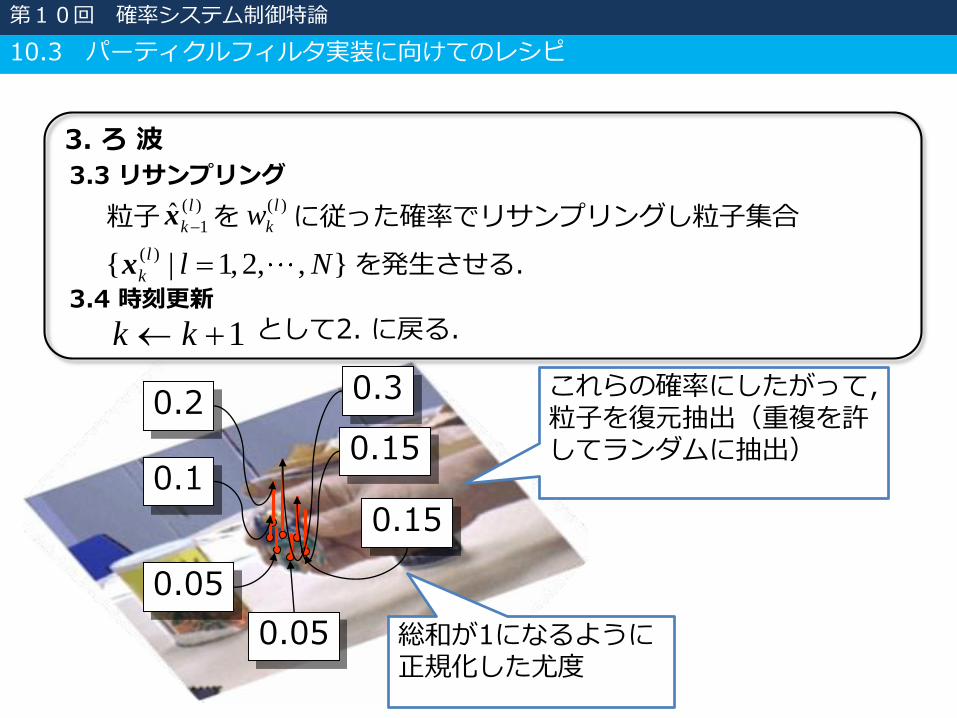
3.3 リサンプリング
粒子 を に従った確率でリサンプリングし
粒子集合 を発生させる.
( )
1ˆ l
kx( )l
kw
( ){ | 1, 2, , }
l
k l Nx
3.4 時刻更新
1k k として2. に戻る.
パーティクルフィルタの中で最も簡単なモンテカルロフィルタ
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
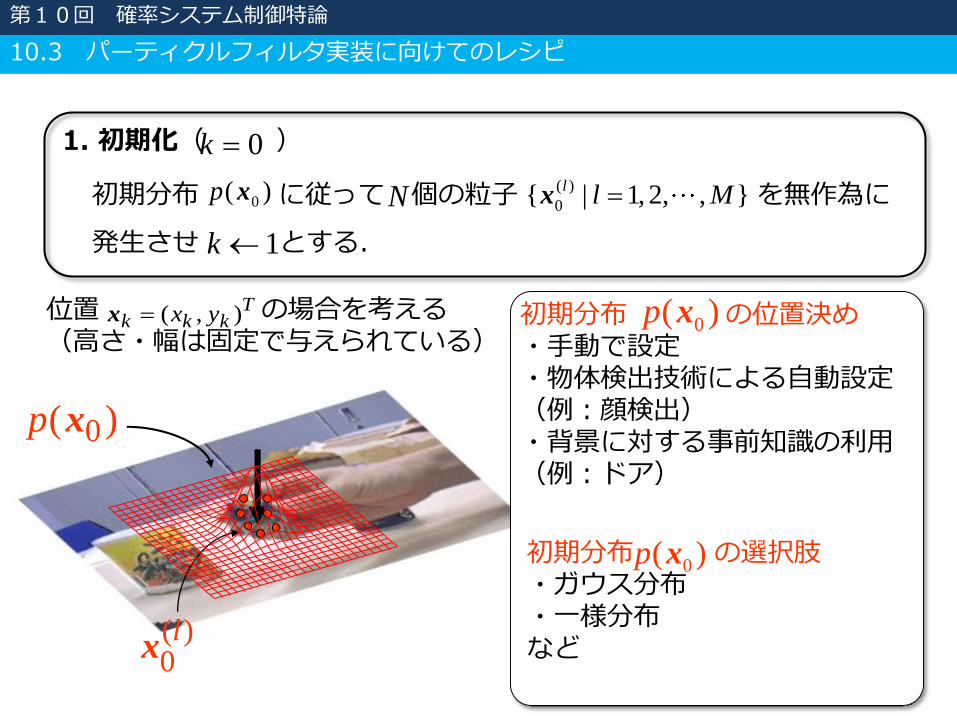
位置 の場合を考える(高さ・幅は固定で与えられている)
( , )T
k k kx yx
0( )p x
初期分布 の位置決め・手動で設定・物体検出技術による自動設定(例:顔検出)・背景に対する事前知識の利用(例:ドア)
初期分布 の選択肢・ガウス分布・一様分布など
0( )p x
0( )p x
( )0l
x
1. 初期化( )
初期分布 に従って 個の粒子 を無作為に
発生させ とする.
0k
0( )p x N( )
0{ | 1, 2, , }l
l Mx
1k
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
15/36
( )
0{ | 1, }l l Nx ( )
1ˆ{ | 1, }l l Nx
0k 1k
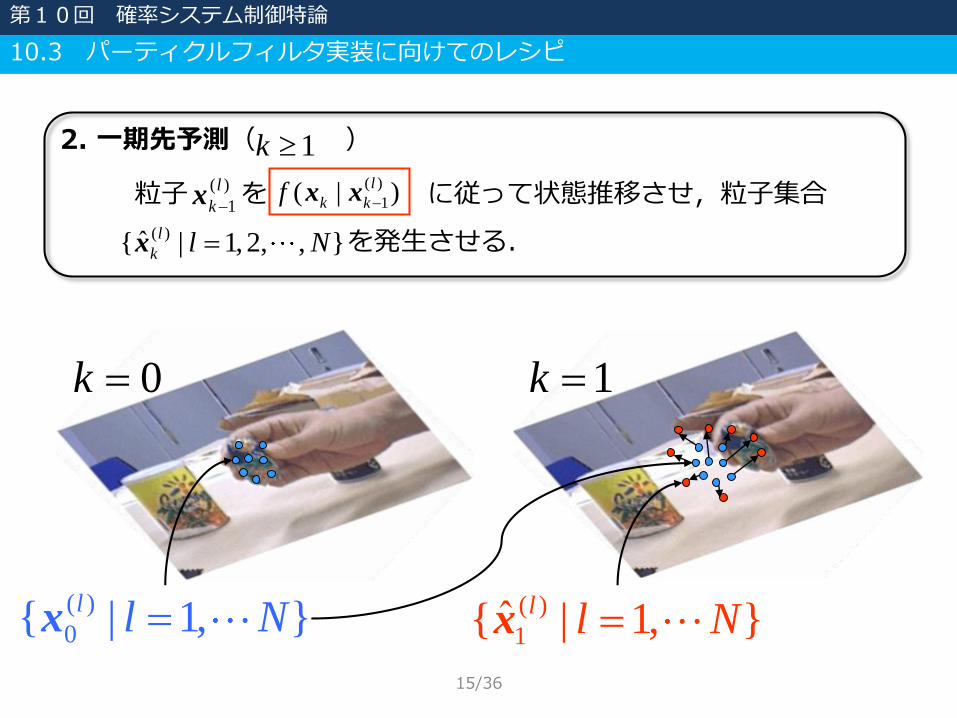
2. 一期先予測( )1k
粒子 を に従って状態推移させ,粒子集合
を発生させる.( )ˆ{ | 1, 2, , }l
k l Nx
( )
1
l
kx( )
1( | )l
k kf x x
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

16/36
番目の粒子の動きl
( )
0
lx
( )
1ˆ lx
( ) ( ) ( )
1
l l l
k k k x x v( )
1ˆ( | )
l
k kf x x例えば
前時刻の粒子に確率的な成分を加える
2. 一期先予測( )1k
粒子 を に従って状態推移させ,粒子集合
を発生させる.( )ˆ{ | 1, 2, , }l
k l Nx
( )
1
l
kx( )
1( | )l
k kf x x
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

17/36
( )ˆ{ | 1, }l
k l Nx
( )ˆ l
kx
( ) ( )ˆ( | )l l
k k kw h y x
粒子 の尤もらしさを評価
( )ˆ l
kx
粒子 が与えられるとそれに対応する領域が特定できる
( )l
kx
( )l
kw
各粒子の尤もらしさ(尤度)を評価
3. ろ 波
3.1 尤度計算
粒子 の尤度 を計算する.( )
1ˆ l
kx( ) ( )ˆ( | )l l
k k kw h y x
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
18/36
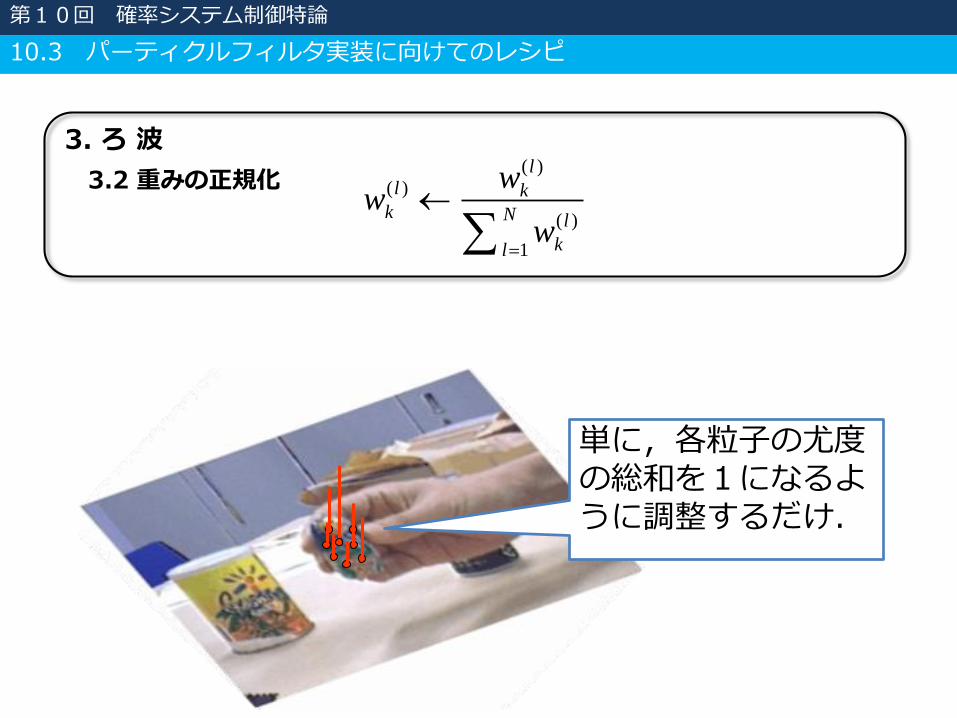
単に,各粒子の尤度の総和を1になるように調整するだけ.
3. ろ 波
3.2 重みの正規化( )
( )
( )
1
l
l k
k N l
kl
ww
w
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
19/36
0.30.2
0.1
0.05
0.05
0.15
0.15
総和が1になるように正規化した尤度
これらの確率にしたがって,粒子を復元抽出(重複を許してランダムに抽出)
3. ろ 波
3.3 リサンプリング
粒子 を に従った確率でリサンプリングし粒子集合
を発生させる.
( )
1ˆ l
kx( )l
kw
( ){ | 1, 2, , }
l
k l Nx
3.4 時刻更新
1k k として2. に戻る.
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

20/36
0.30.2
0.1
0.05
0.05
0.15
0.15
消滅
3個複製
2個複製
1個複製
複製( ){ | 1, }l
k l Nx
3. ろ 波
3.3 リサンプリング
粒子 を に従った確率でリサンプリングし
粒子集合 を発生させる.
( )
1ˆ l
kx( )l
kw
( ){ | 1, 2, , }
l
k l Nx
3.4 時刻更新
1k k として2. に戻る.
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論
21/36
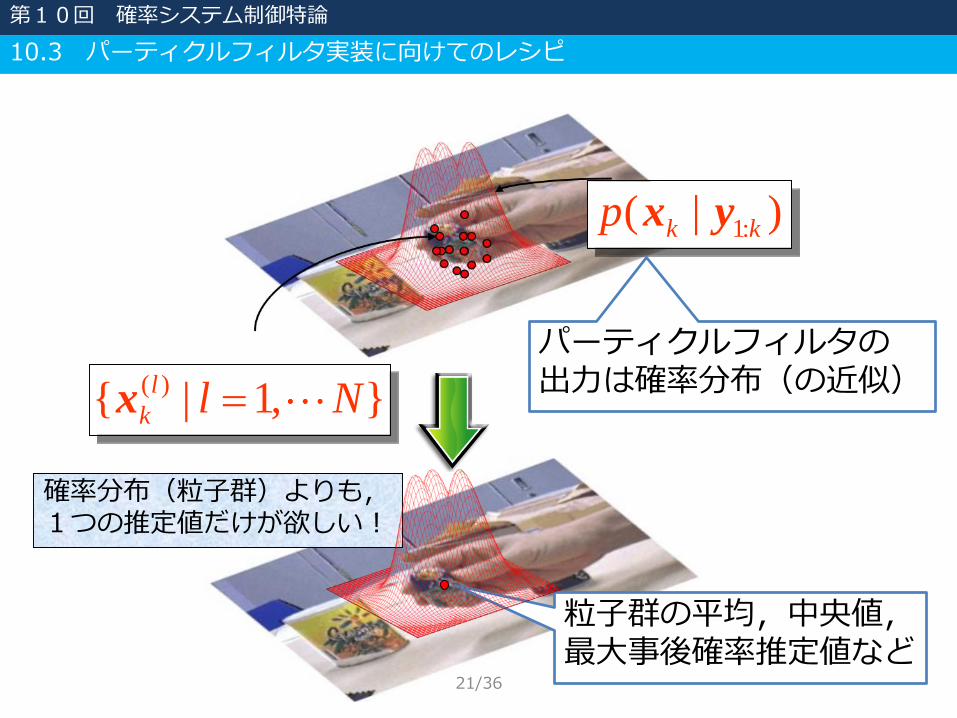
( ){ | 1, }l
k l Nx
1:( | )k kp x y
パーティクルフィルタの出力は確率分布(の近似)
確率分布(粒子群)よりも,1つの推定値だけが欲しい!
粒子群の平均,中央値,最大事後確率推定値など
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論

22/36
材料
kx・状態 → 位置,角度,大きさ…
ky・観測値 → 画素値,ヒストグラム,輪郭,特徴点…
( )
1( | )l
k kf x x・運動モデル → 1
1 2
,
2
k k k
k k k k
x x v
x x x v
kv・システム雑音 → ガウス分布,コーシー分布,t分布…
・初期分布 0( )p x → ガウス分布,一様分布…
決定法:手動設定,物体検出技術,背景構造に対する知識
・観測モデル( )( | )l
k kh y x → 画像処理・パターン認識による類似度
10.3 パーティクルフィルタ実装に向けてのレシピ
第10回 確率システム制御特論





![納まり参考図 - fujisash.co.jp61]drawing.pdf · 納まり参考図 rcタイル貼り(掃き出し窓) fns-70 引違い窓 fd-70n 開きドア rc打ち放し(腰窓) fns-70](https://static.fdocument.pub/doc/165x107/5af81c277f8b9a5b1e915ead/-61drawingpdf-rc.jpg)