È Ts¢& Ïtlh ËméØ¿Äw Ú S 2æM - Osaka University · Tomomichi Sugihara | Osaka University...
4
滑らかな曲線経路に沿った二脚ロボットの任意速度歩行制御 Arbitrary Speed Walk Control of A Biped Robot Along a Smooth Curved Path ( 大) ( 大) Haruki Nozaki,Osaka University,[email protected] Tomomichi Sugihara,Osaka University This paper presents a trajectory-free biped robot control to walk along a smooth curved path. The previous version of the controller which only worked for a straight walk is redesigned with respect to the moving frame attached to the robot body in order to achieve a walk along an arc. It is found that the controller only requires a local curvature of the referential path in addition to the state with respect to the frame, so that it is directly applicable to an arbitrary smooth path including the straight walk. Key Words: Biped robot, Omnidirectional walk, Path tracking 1. はじめに ロボット , 帯 き い を に えた移 態 ある. されておらず, に んだ を に移 するこ が められる. 安 に る う に え, 意 タイミング 移 を変 し, に対 きる が ある. 々 学 , を け が ら, ロボットを に移 させる だ 題 あ る. が によくわかっていれ , め 運 を して し,これにロボットを わせる こ ある を するこ が きる [1] [2].しか し , を きるほ が に られるこ ある. に ら い [3][4][5][6][7] 案されているが,それら 多く しか してい い , 移 を するま に 題が している. こ よう ,Sugihara[8][9][10][11] 々 運 を 一 に する 学変 に づく を 案している.これ を いず, 意 タイミング き し, 変 , し,また運 に大き を けて み しによって を れる を にする ある.ただし移 に られていた.これを拡 し, を するこ が ある. , に え て 右 移 による を し けれ ら い. ら [12] により された. ため を 案する. ,ロボットに って ・ 右 が慣 に対して あり, を するこ く り扱うこ が される. を う , ・ 右 運 に って慣 に対し変 する.したがって を,移 に対して する がある. まず,ロボットがある円 に沿って する し を , を 右 して, [11] 案された を 変 する.これにより, を う運 において じる コリオリ を する が られる. 意 らか 円 によって きるため,こうし たアプローチ 妥 ある. に て る が み あり, 意 らか にそ まま あるこ を す.これ に, 案する が を するこ を意 する. 2. 力学変容に基づく前後進歩行制御 [11] ロボット 運 を, およびそこに す る に づいて に らえる.ロボット が に し, りトルク きる する.ロボッ ト , , をそれぞれ x,y,z に り,また ため さ に一 せる する ,ロボット 運 される. ¨ x = ζ 2 (x - x Z ) (1) ¨ y = ζ 2 (y - y Z ) (2) ただし, 位 を p =[xyz] T , ZMP 位 を p Z =[x Z y Z z Z ] T おいた.また ζ ≡ r g z ,g =9.8[m/s 2 ] ある. ZMP[13] に , に 域( ) に し けれ ら い いう が される.これ ように さ れる. p Z ∈ S (3) ただし S 域 あり,運 に って変 する. 移 ために , 域 ZMP , み替えによる 域 変 を し けれ ら い. (1)(2) 対 あるが, ロボット 体 が 右 について 対 いため, ま 対 に するこ き い.す わち, に に を み して を り替えら れる に対し, 右 において が するため, 対 を越えて み すこ け けれ ら い.また片 を させる , 影 を に維 き く る,す わちそ まま 安 を つこ が き い. これに対し Sugihara[11] が 案した , を つ. 1. 右 について を安 リミットサイクルに さ せる.こ き, 位 ZMP するこ が かっている ,これ して安 み替え を うこ が きる. 䢵䣒䢳䢯䣆䢲䢹 䢵䣒䢳䢯䣆䢲䢹䢪䢳䢫 䣐䣱䢰 䢳䢶䢯䢴 䣒䣴䣱䣥䣧䣧䣦䣫䣰䣩䣵 䣱䣨 䣶䣪䣧 䢴䢲䢳䢶 䣌䣕䣏䣇 䣅䣱䣰䣨䣧䣴䣧䣰䣥䣧 䣱䣰 䣔䣱䣤䣱䣶䣫䣥䣵 䣣䣰䣦 䣏䣧䣥䣪䣣䣶䣴䣱䣰䣫䣥䣵䢮 䣖䣱䣻䣣䣯䣣䢮 䣌䣣䣲䣣䣰䢮 䣏䣣䣻 䢴䢷䢯䢴䢻䢮 䢴䢲䢳䢶
Transcript of È Ts¢& Ïtlh ËméØ¿Äw Ú S 2æM - Osaka University · Tomomichi Sugihara | Osaka University...
滑らかな曲線経路に沿った二脚ロボットの任意速度歩行制御
Arbitrary Speed Walk Control of A Biped Robot Along a Smooth Curved Path
© 野崎 晴基(阪大) 杉原 知道(阪大)
Haruki Nozaki,Osaka University,[email protected]
Tomomichi Sugihara,Osaka University
This paper presents a trajectory-free biped robot control to walk along a smooth curved path. The previousversion of the controller which only worked for a straight walk is redesigned with respect to the moving frameattached to the robot body in order to achieve a walk along an arc. It is found that the controller only requiresa local curvature of the referential path in addition to the state with respect to the frame, so that it is directlyapplicable to an arbitrary smooth path including the straight walk.
Key Words: Biped robot, Omnidirectional walk, Path tracking
1. はじめに
二脚ロボットは,車輪や履帯では発揮できない機動力を潜在的
に備えた移動形態である.整備されておらず,外乱に富んだ環境
内を自在に移動することが求められる.複雑な地形上で安定に振
る舞う能力に加え,任意のタイミングで移動方向や速度を変更
し,咄嗟の状況に対応できる即応性が必要である.
様々な力学的拘束条件の下で,転倒や脚同士の干渉を避けなが
ら,二脚ロボットを自在に移動させるのは未だ困難な問題であ
る.環境や状況が事前によくわかっていれば,予め詳細な参照運
動軌道を時刻の関数として設計し,これにロボットを従わせる
ことである程度高度な作業を遂行することができる [1] [2].しか
し現実的な状況で,詳細な軌道を準備できるほどの情報が事前
に得られることは稀である.参照軌道に頼らない二脚歩行制御
[3][4][5][6][7] も提案されているが,それらの多くは歩行しか想定
していない等,自在な移動と作業を実現するまでには課題が山積
している.
このような中,Sugihara[8][9][10][11] は様々な二脚運動を統一
的に実現する力学変容に基づく制御を提案している.これは参照
軌道を用いず,任意のタイミングで動き出し,速度可変直進歩行,
停止し,また運動中に大きな摂動を受けても踏み出しによって転
倒を免れるなどを可能にするものである.ただし移動は直線的な
前後進歩行に限られていた.これを拡張し,全方向への歩行を可
能とすることが本研究の目的である.全方向歩行は,直進に加え
て左右方向移動と旋回による方向転換を可能としなければならな
い.前者は熱田ら [12] により実現された.本稿では後者のため
の制御を提案する.
直線的な歩行では,ロボットにとっての前後・左右方向が慣性
系に対して固定的であり,両者を区別することなく取り扱うこと
が許容される.旋回を伴う歩行の場合,前後・左右方向は運動に
伴って慣性系に対し変化する.したがって制御器を,移動座標系
に対して設計する必要がある.本稿ではまず,ロボットがある円
周経路に沿って歩行するものと仮定し経路の接線方向を前後方
向,動径方向を左右方向として,先行研究 [11]で提案された直進
歩行制御を座標変換する.これにより,旋回を伴う運動において
生じる遠心力やコリオリ力等を補償する表現が得られる.任意の
滑らかな曲線経路は円弧の接続によって近似できるため,こうし
たアプローチは妥当である.最終的に直進歩行制御と比べて必要
となる情報が経路の局所的な曲率のみであり,任意の滑らかな曲
線経路への追従歩行にそのまま適用可能であることを示す.これ
は同時に,提案する制御器が直進歩行制御器を包含することを意
味する.
2. 力学変容に基づく前後進歩行制御 [11]
二脚ロボットの運動を,重心と両足接地点およびそこに発生す
る反力の関係に基づいて巨視的にとらえる.ロボットの全質量が
重心に集中し,重心周りトルクは無視できるものとする.ロボッ
ト前方向,左手方向,鉛直上方向をそれぞれ x,y,z 軸正方向に
とり,また簡単のため重心の鉛直高さは常に一定と見なせると仮
定すると,ロボットの運動方程式は次式で表される.
x = ζ2(x− xZ) (1)
y = ζ2(y − yZ) (2)
ただし,重心位置を p = [x y z]T,ZMP位置を pZ = [xZ yZ zZ ]T
とおいた.また ζ ≡√
g
z,g =9.8[m/s2] は重力加速度である.
ZMP[13]には,常に支持領域(接触点群の凸包)の内部に存在し
なければならないという制約が課される.これは次のように表さ
れる.
pZ ∈ S (3)
ただし S は支持領域であり,運動に伴って変化する.二脚移動
のためには,支持領域内での ZMP操作と,足の踏み替えによる
支持領域の変形を両立しなければならない.式 (1)(2) は対称で
あるが,二脚ロボットの身体構造が前後方向と左右方向について
対称でないため,制御器まで対称に構成することはできない.す
なわち,前後方向には交互に足を踏み出して支持脚を切り替えら
れるのに対し,左右方向においては両脚が干渉するため,反対側
の脚を越えて踏み出すことは避けなければならない.また片足を
離床させると,重心投影点を両足の中点に維持できなくなる,す
なわちそのまま平衡安定を保つことができない.
これに対し Sugihara[11] が提案した制御器は,次の性質を
持つ.
1. 左右方向については重心を安定リミットサイクルに収束さ
せる.このとき,重心と同位相で ZMPも振動することが分
かっているので,これと連動して安定な足の定常的踏み替え
を行うことができる.
P D0
P D0 (
N . 4 2 Pr d n f th 20 4 J nf r n n R b t nd h tr n , T , J p n, 2 2 , 20 4

Fig.1 Phase portrait of COM state controlled based on dynamics morphing
2. 前後方向については重心速度を目標速度に追従させる.支持
領域が不変なままでは不可制御な状態に陥り転倒するが,左
右方向の定常的踏み替えが既に実現されているので,これと
自然に連動して転倒を防ぐ位置に次の支持足を送り出すこと
ができる.
3. 上記の左右方向,前後方向制御とも,立位制御 [9]から連続
的に遷移できる.
具体的には次のように制御器を設計する.
xZ = dx+ (qx + 1)
(x− dx+
x− dvxζ
)(4)
xZ =
xZmax (T1: xZ > xZmax)xZ (T2: xZmin ≤ xZ ≤ xZmax)xZmin (T3: xZ < xZmin)
(5)
yZ = dy + (qy + 1)
(y − dy + f(γ)
y
ζ
)(6)
yZ =
yZmax (S1: yZ > yZmax)yZ (S2: yZmin ≤ yZ ≤ yZmax)yZmin (S3: yZ < yZmin)
(7)
ただし
f(γ) ≡ 1− ρ exp k
{1− (qy + 1)2γ2
R2
}(8)
γ ≡
√(y − dy)2 +
y2
ζ2qy(9)
であり,dx, dy は参照重心位置,dvx は前後方向の参照速度, 定数
qx(≥ 0), qy(≥ 0), k(> 0), R(> 0) および ρ(≥ 0) は定数である.
これは ρ = 0,qx > 0で立位安定化制御器となり,ρ = 1,qx = 0
で前後進歩行制御器となる.このとき qy および kはそれぞれ,安
定リミットサイクルの周期およびそれへの収束速さを決定する.
上記の制御器を用いた際の重心の振る舞いを図 2.の相図(解曲
線群)に示す.これらは横軸に位置,縦軸に速度をとっている.
図中の青の点線で挟まれた領域を立位安定領域と呼び,重心の状
態がこの領域内にあるときは平衡点に収束,そうでないときは発
散する.
また重心と連動し,両足を踏み替える.左右方向の振る舞い
は,重心に同期して振動する ZMPと各々の足裏接地面との位置
関係に基づいて決定し,前後方向は離床している足を強立位可安
定条件 [9]に基づいて決まる位置へと運ぶ.これにより継続的な
前後進歩行が達成される.
Fig.2 Moving frame accompany with the COMmovement along
a circular orbit
3. 滑らかな曲線に沿った任意速度歩行制御
3.1 円弧に沿った重心制御
前章の制御器において,運動の方向は変わらないものとし,前
後方向および左右方向をそれぞれ慣性座標系の x軸,y 軸として
取り扱うことができた.しかし,ロボットが慣性系内を自由に歩
行する場合,これに伴って前後・左右方向は変化する.したがっ
て制御器を,ロボットと共に移動する座標系に対して設計する必
要がある.
簡単のため,ロボットがある円周経路に沿って歩行する状況を
考えよう.重心が,図 2のように慣性系内の点 (ax, ay)を中心と
して運動しているものとし,次のように座標変換する.
[xy
]= r
[cos θsin θ
]+
[axay
](10)
ただし,重心座標の動径および偏角をそれぞれ rおよび θとおい
た.ロボットにとっての前後方向および左右方向は,重心運動の
接線方向および動径方向とそれぞれ対応づけることができる.そ
こで,重心位置を原点とし,接線方向に u軸,動径方向に w軸を
設け,u-w 座標系における ZMP 位置を (uZ , wZ) として運動方
程式 (1),(2)を変換すると,次式を得る.
r = rθ2 − ζ2wZ (11)
θ = −2rθ
r− ζ2uZ
r(12)
式 (11)の第 1項は遠心力に,式 (12)の第 1項はコリオリ力にそ
P D0 (2
N . 4 2 Pr d n f th 20 4 J nf r n n R b t nd h tr n , T , J p n, 2 2 , 20 4
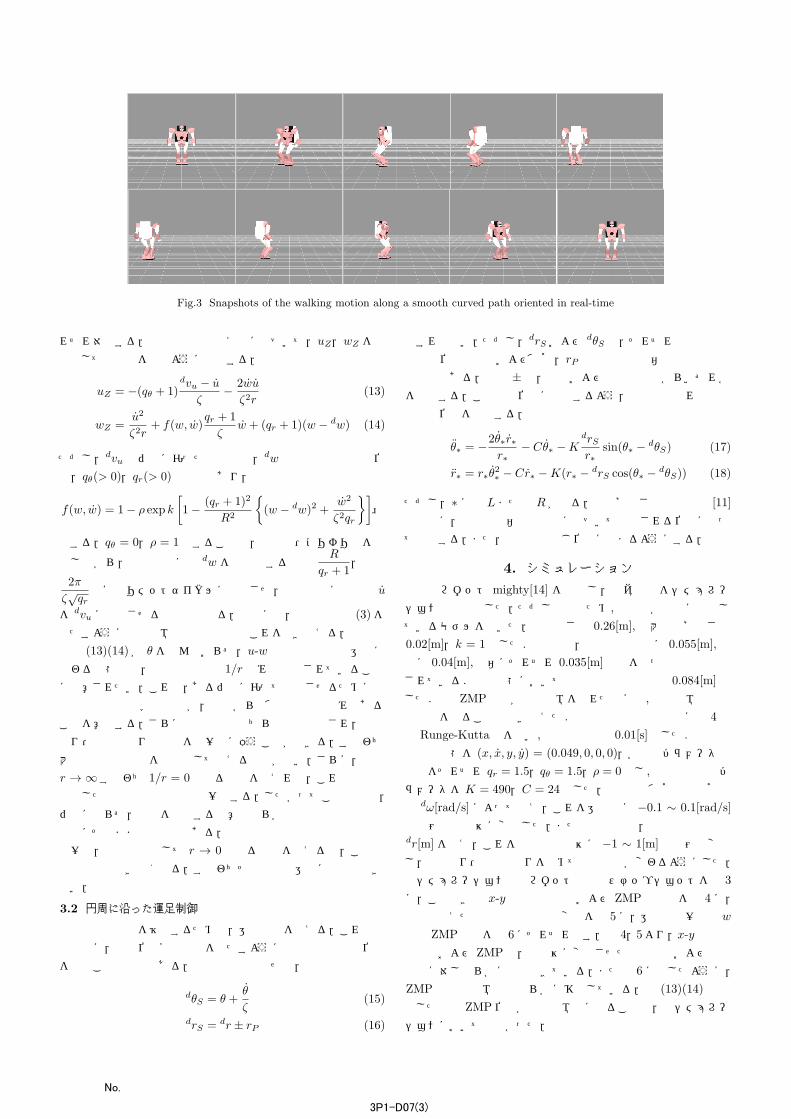
Fig.3 Snapshots of the walking motion along a smooth curved path oriented in real-time
れぞれ対応する.前章の制御の考え方に基づいて,uZ,wZ を入
力として制御器を次のように設計する.
uZ = −(qθ + 1)dvu − u
ζ− 2wu
ζ2r(13)
wZ =u2
ζ2r+ f(w, w)
qr + 1
ζw + (qr + 1)(w − dw) (14)
ただし,dvu は円周に沿った参照速度,dw は動径方向の参照位
置,qθ(> 0),qr(> 0)は定数であり,
f(w, w) = 1− ρ exp k
[1− (qr + 1)2
R2
{(w − dw)2 +
w2
ζ2qr
}]
とする.qθ = 0,ρ = 1とすることで,遠心力・コリオリ力を補
償しながら,動径方向には dw を中心とする振幅R
qr + 1,周期
2π
ζ√qrの安定リミットサイクルに収束させ,前後方向には速度 u
を dvu に収束させる制御器となる.実際には,拘束条件式 (3)を
満たすように支持領域上の最近傍点でこれを置き換える.
式 (13)(14) が θ を含んでおらず,u-w 座標系での重心運動に
関わる状態量と,局所的な曲率 1/r のみで定義されていること
に注意されたい.これは,ある円周に沿って歩行させるために必
要な経路の幾何学的情報が,経路からの偏差と曲率のみである
ことを意味する.さらに曲率は正負どちらの値も許容され,時計
回り・反時計回りの旋回を統一的に扱うことができる.すなわち
大局的な経路形状を情報として与える必要がない.さらに,極限
r → ∞すなわち 1/r = 0となる場合を考えれば,これは前章で
設計した前後進歩行制御器と一致する.したがってこの制御は,
円周に限らず,直線を包含する任意の滑らかな曲線経路への追従
歩行にそのまま適用可能である.
一方,逆の極限として r → 0 となる場合を考えると,この制
御器は定義できなくなる.すなわちその場旋回運動には適用でき
ない.
3.2 円周に沿った運足制御
継続的な歩行を維持するための,運足制御を考える.これは前
章同様に,強立位可安定条件を満たすように遊脚足先の着地位置
を選ぶことで可能である.平面極座標で表せば,
dθS = θ +θ
ζ(15)
drS = dr ± rP (16)
とすれば良い.ただし,drS および dθS は,それぞれ遊脚足先目
標着地位置の動径および偏角,rP は両足間の左右方向幅の半分
の距離である.復号 ± は,遊脚および曲率の符号からいずれかを決定する.この目標位置に追従するよう,次の二次遅れ系で遊
脚足先位置を制御する.
θ∗ = −2θ∗r∗r∗
− Cθ∗ −KdrSr∗
sin(θ∗ − dθS) (17)
r∗ = r∗θ2∗ − Cr∗ −K(r∗ − drS cos(θ∗ − dθS)) (18)
ただし,∗ には L または R が入る.足上げ高さは先行研究 [11]
と同様に,重心の左右方向揺動に基づいて定義される位相に従っ
て決定する.また,着地後は同じ位置に留まるようにする.
4. シミュレーション
人型ロボット mighty[14] を想定し,提案方法をシミュレー
ション上で実装した.ただし簡単のため, 全質量が重心に集中し
ているモデルを用いた.重心高さは 0.26[m], 最大足上げ高さは
0.02[m],k = 1とした.足形状は,両足とも前方に 0.055[m],後
方に 0.04[m],左右にそれぞれ 0.035[m]の幅を持つ長方形で表現
されている. 初期状態において両足間の幅の距離は 0.084[m] と
した.目標 ZMP座標が支持領域を外れた際には, 支持領域上の最
近傍点をとることで置き換えた.微分方程式の数値解法には 4次
の Runge-Kutta法を用い, 積分時間幅は 0.01[s]とした.
初期状態を (x, x, y, y) = (0.049, 0, 0, 0),各制御パラメータ初
期値をそれぞれ qr = 1.5,qθ = 1.5,ρ = 0とし,遊脚時の設計パ
ラメータを K = 490,C = 24とした.指令値は偏角の目標角速
度 dω[rad/s] によって与え,これを運動中に −0.1 ∼ 0.1[rad/s]
の範囲で無作為に変更した.また曲率半径も,動径の目標半径dr[m] を与え,これを手動で無作為に −1 ∼ 1[m] の範囲で変更
し,時計回り・反時計回りを含めて曲線経路が変わるようにした.
シミュレーション中のロボット歩行のスナップショットを図 3
に,このときの x-y 平面上の重心および ZMPの軌跡を図 4に,
手動で与えた経路の曲率半径の変化を図 5に,運動中の一部の w
方向 ZMP軌跡を図 6にそれぞれ示す.図 4,5より,x-y平面上
で重心および ZMPは,無作為に変化させた目標速度および曲率
半径に対し滑らかに追従できている.また図 6に示したように,
ZMP は支持領域内で滑らかに移動している.式 (13)(14) で決
定した目標 ZMP位置が支持領域外に出ることは,本シミュレー
ションにおいては無かった.
P D0 (
N . 4 2 Pr d n f th 20 4 J nf r n n R b t nd h tr n , T , J p n, 2 2 , 20 4
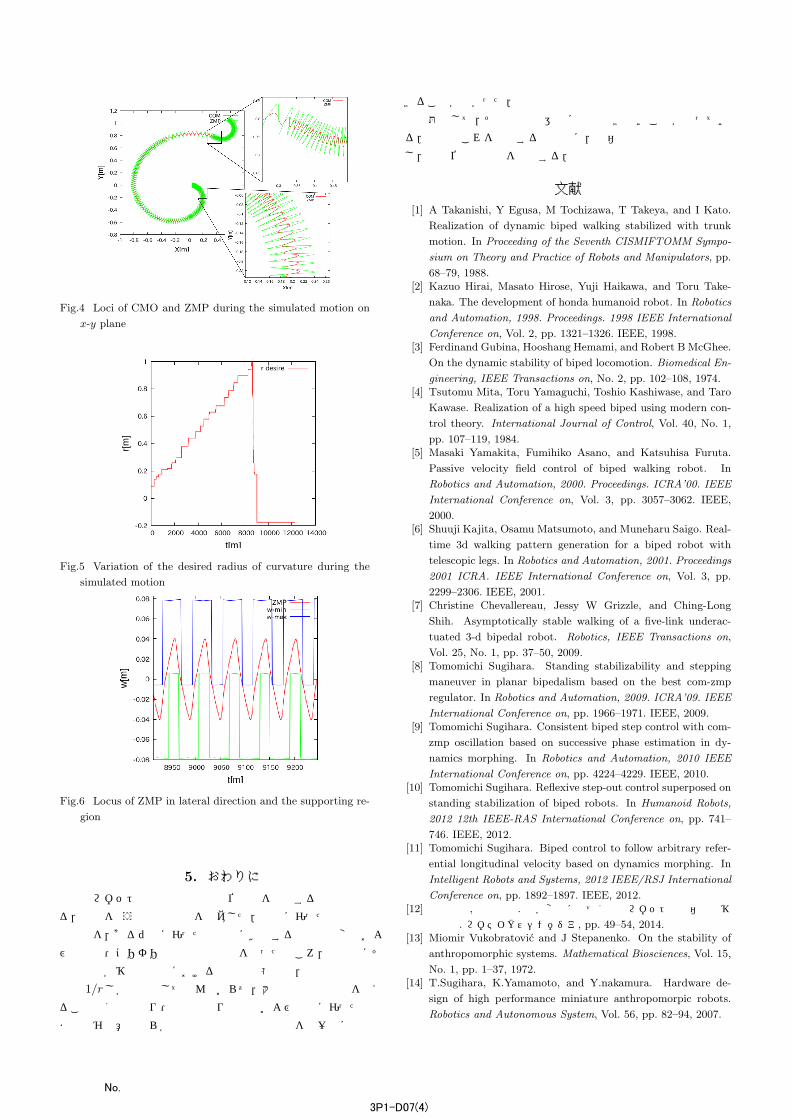
Fig.4 Loci of CMO and ZMP during the simulated motion on
x-y plane
Fig.5 Variation of the desired radius of curvature during the
simulated motion
Fig.6 Locus of ZMP in lateral direction and the supporting re-
gion
5. おわりに
二脚ロボットの平面内での全方位歩行を実現する上で必要とな
る,旋回を伴う歩行制御器を提案した.直線に沿った前後進歩行
制御器を,ある円周に沿った制御器に拡張する形で座標変換およ
び遠心力・コリオリ力補償項の付加を行ったところ,結果的にそ
の制御器が移動座標系における重心の状態量と,経路の局所的な
曲率 1/rしか情報として含んでおらず,大局的な経路形状を与え
ることなく時計回り・反時計回りの旋回および直線に沿った歩行
まで含む任意の滑らかな曲線経路への追従歩行を統一的に実現で
きることが分かった.
問題として,その場旋回運動に適用できないことが残ってい
る.今後はこれを解決すると同時に,左右方向歩行制御とも統合
し,全方位歩行制御を実現する.
文献[1] A Takanishi, Y Egusa, M Tochizawa, T Takeya, and I Kato.
Realization of dynamic biped walking stabilized with trunk
motion. In Proceeding of the Seventh CISMIFTOMM Sympo-
sium on Theory and Practice of Robots and Manipulators, pp.
68–79, 1988.[2] Kazuo Hirai, Masato Hirose, Yuji Haikawa, and Toru Take-
naka. The development of honda humanoid robot. In Robotics
and Automation, 1998. Proceedings. 1998 IEEE International
Conference on, Vol. 2, pp. 1321–1326. IEEE, 1998.[3] Ferdinand Gubina, Hooshang Hemami, and Robert B McGhee.
On the dynamic stability of biped locomotion. Biomedical En-
gineering, IEEE Transactions on, No. 2, pp. 102–108, 1974.[4] Tsutomu Mita, Toru Yamaguchi, Toshio Kashiwase, and Taro
Kawase. Realization of a high speed biped using modern con-
trol theory. International Journal of Control, Vol. 40, No. 1,
pp. 107–119, 1984.[5] Masaki Yamakita, Fumihiko Asano, and Katsuhisa Furuta.
Passive velocity field control of biped walking robot. In
Robotics and Automation, 2000. Proceedings. ICRA’00. IEEE
International Conference on, Vol. 3, pp. 3057–3062. IEEE,
2000.[6] Shuuji Kajita, Osamu Matsumoto, and Muneharu Saigo. Real-
time 3d walking pattern generation for a biped robot with
telescopic legs. In Robotics and Automation, 2001. Proceedings
2001 ICRA. IEEE International Conference on, Vol. 3, pp.
2299–2306. IEEE, 2001.[7] Christine Chevallereau, Jessy W Grizzle, and Ching-Long
Shih. Asymptotically stable walking of a five-link underac-
tuated 3-d bipedal robot. Robotics, IEEE Transactions on,
Vol. 25, No. 1, pp. 37–50, 2009.[8] Tomomichi Sugihara. Standing stabilizability and stepping
maneuver in planar bipedalism based on the best com-zmp
regulator. In Robotics and Automation, 2009. ICRA’09. IEEE
International Conference on, pp. 1966–1971. IEEE, 2009.[9] Tomomichi Sugihara. Consistent biped step control with com-
zmp oscillation based on successive phase estimation in dy-
namics morphing. In Robotics and Automation, 2010 IEEE
International Conference on, pp. 4224–4229. IEEE, 2010.[10] Tomomichi Sugihara. Reflexive step-out control superposed on
standing stabilization of biped robots. In Humanoid Robots,
2012 12th IEEE-RAS International Conference on, pp. 741–
746. IEEE, 2012.[11] Tomomichi Sugihara. Biped control to follow arbitrary refer-
ential longitudinal velocity based on dynamics morphing. In
Intelligent Robots and Systems, 2012 IEEE/RSJ International
Conference on, pp. 1892–1897. IEEE, 2012.[12] 熱田洋史, 杉原知道. 力学変容に基づく二脚ロボットの左右方向移
動制御. ロボティクスシンポジア, pp. 49–54, 2014.[13] Miomir Vukobratovic and J Stepanenko. On the stability of
anthropomorphic systems. Mathematical Biosciences, Vol. 15,
No. 1, pp. 1–37, 1972.[14] T.Sugihara, K.Yamamoto, and Y.nakamura. Hardware de-
sign of high performance miniature anthropomorpic robots.
Robotics and Autonomous System, Vol. 56, pp. 82–94, 2007.
P D0 (4
N . 4 2 Pr d n f th 20 4 J nf r n n R b t nd h tr n , T , J p n, 2 2 , 20 4