稳定性是系统本身的性质之一,与激励信号无关。 稳
57
稳稳稳稳稳 稳稳稳稳稳稳 稳稳稳稳稳稳稳稳 稳 一,。 统 §3.6 LTI 系 系系系系 统 稳稳稳稳稳稳稳稳稳稳稳: 稳 稳稳稳稳稳稳 统 。 LTI 稳统 BIBO 稳稳稳稳稳稳稳稳稳 稳 BIBO 稳稳 稳稳稳稳稳稳稳 稳 稳稳稳稳稳稳 ) 。, , 统 统 稳稳稳稳稳稳稳稳 稳稳 稳稳稳稳稳稳稳稳稳稳稳 稳 :( 统 稳稳稳稳稳稳稳 稳稳稳稳稳稳稳稳稳稳稳 稳稳稳稳 ,。 稳稳 稳稳稳 稳稳稳稳稳稳稳稳稳稳 稳 稳稳稳稳稳稳稳 统一统一 M dt t h
description
§3.6 LTI 系统的稳定性. 稳定性是系统本身的性质之一,与激励信号无关。 稳. 定系统也是一般系统设计的目标之一。稳定性的概念有. 几种不同的提法,但是没有实质性的差别。 这里给出. 普遍采用的稳定系统定义:有界输入产生有界输出(简. 称 BIBO )的系统。如果对有界激励,系统的响应无界,. 系统就是不稳定的。 LTI 系统 BIBO 稳定的充分必要条件. 是单位冲激响应绝对可积:. 为一有界的实数。满足此式的,一定是随时间. 上式中. 。 LTI 系统的系统函数与单位. 衰减的函数,即. 冲激响应集中表征了系统特性,稳定性也必在其中。所. - PowerPoint PPT Presentation
Transcript of 稳定性是系统本身的性质之一,与激励信号无关。 稳

稳定性是系统本身的性质之一,与激励信号无关。 稳§3.6 LTI系统的稳定性
是单位冲激响应绝对可积:系统就是不稳定的。 LTI 系统 BIBO 稳定的充分必要条件称 BIBO )的系统。如果对有界激励,系统的响应无界,普遍采用的稳定系统定义:有界输入产生有界输出(简几种不同的提法,但是没有实质性的差别。 这里给出定系统也是一般系统设计的目标之一。稳定性的概念有
Mdtth
将系统稳定性分为三类。
上式中M
tht lim以既可由
0lim
tht
sH
为一有界的实数。满足此式的,一定是随时间衰减的函数,即 。 LTI 系统的系统函数与单位冲激响应集中表征了系统特性,稳定性也必在其中。所
的不同情况,也可由 的极点分布,
一、系统稳定性分类1 稳定由 §3.6 零、极点分析可知, 若的全部极点在的左半平面(不含虚轴),单位冲激响应满足
0lim
tht 系统稳定
1、系统稳定性分类(1) 稳定由 §3.6 零、极点分析可知, 若的全部极点在的左半平面(不含虚轴),单位冲激响应满足
0lim
tht 系统稳定
(2) 不稳定
系统不稳定。若 sH 有极点落在右半平面,或者 j 轴、原点处有二阶以上重极点,则单位冲激响应
thtlim
(3) 边(临)界稳定
,但
为使分类简化,可将其归为非稳定系统。
若 sH j在原点或 轴上有一阶极点,虽然单位冲激响应 0lim
th
t Mth t0
其单位冲激响应为无阻尼(等幅)的正弦振荡。因为3 是处于 1 、 2 两种情况之间,故称边(临)界稳定。
例如纯网络,
二、稳定系统与系统函数分母多项式系数的关系
设:
根,对应因式为
系统函数 sDsNsH /
011
1 asasasasD nn
nn
稳定系统的极点应位于平面的左半平面,因此 sD 根的实部应为负值。它的根一般有下面两种情况:一是实数
as
0a
二是共轭复根,对应因式为 jsjs
22 s
cbssss 2222 2
b c
b sD
as cbss 2 a
c
上式表明复数根只能共轭成对出现,否则不能保证 b 、c 0为实数。又因为复数根的实部应为负值,因此 ,
所以 、 必为正值。综上所述,将 分解后,只有、 两种情况,且 、 、 均为正值。

这两类因式相乘后,得到的多项式系数必然为正值,并
sD
sD 的系数关系:稳定系统与分母多项式且系数为零值的可能性也受到了限制。由此我们可得到
(1)
(2) 多项式从最高次方项排列至最低次项无缺项。 的系数 ia 全部为正实数。
以上是系统稳定的必要条件。

判断。当系统为一阶、二阶系统时,系数如果给定 sH
系统稳定的充分必要条件。0ia
表示式,由此可对系统稳定性作出初步
例 3-24 已知系统的
(3)
sH 如下,试判断是否为稳定系统?
(2)
(1) 234
1223
2
1
sss
sssH
9722
3
23
2
ssssssH
823
2423
2
3
sss
sssH
就是
解 1 分母有负系数所以为非稳定系统解 2
解 3 满足稳定系统的必要条件,是否稳定还需进一步进行分解
定系统。
中缺项,所以不是稳定系统。 sD
分解检验。对 sD
432823 223 sssssssD
可见 sD 有一对正实部的共轭复根,所以系统 3 为非稳
系统稳定性变化。
解
整理上式,得
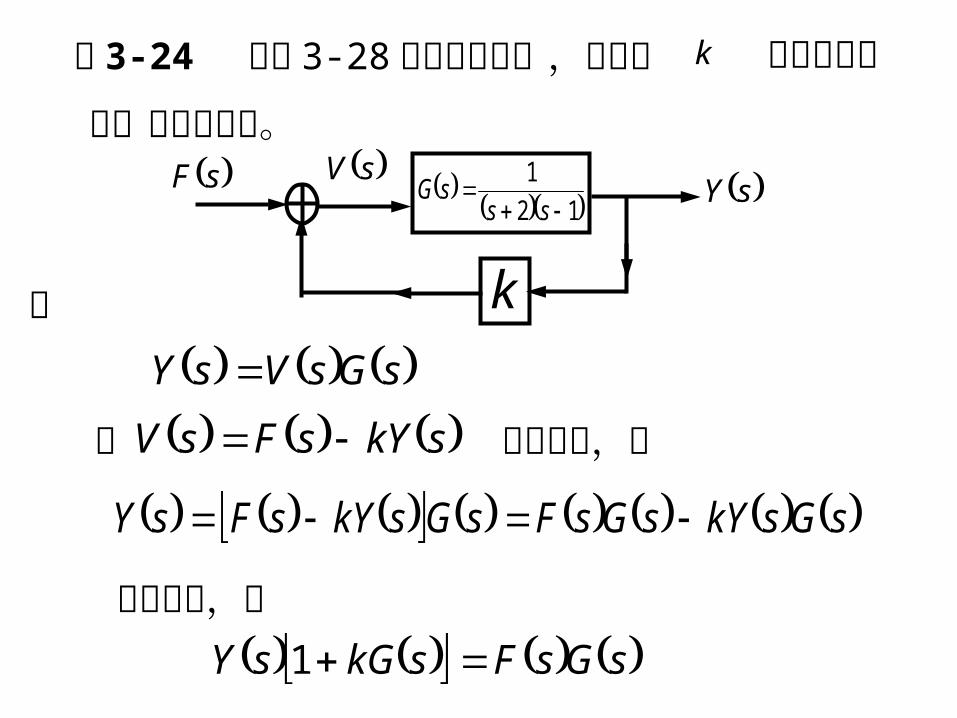
例 3-24 如图 3-28 所示反馈系统,讨论当k 从零增长时 12
1
ss
sG
k
sY sF sV
sGsVsY
skYsFsV
sGskYsGsFsGskYsFsY
将 代入上式,得
sGsFskGsY 1
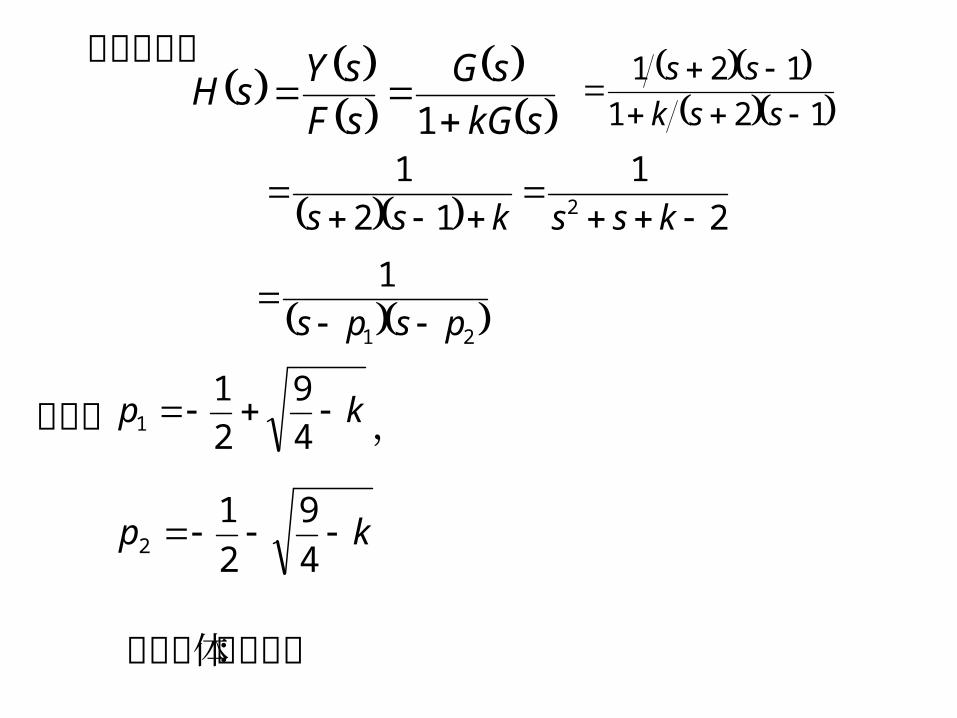
由此得到:
其中:
代入具体值讨论:
skG
sGsFsYsH
1 121
121
sskss
21
121
2
ksskss
kp 49
21
1
kp 49
21
2
21
1psps
,
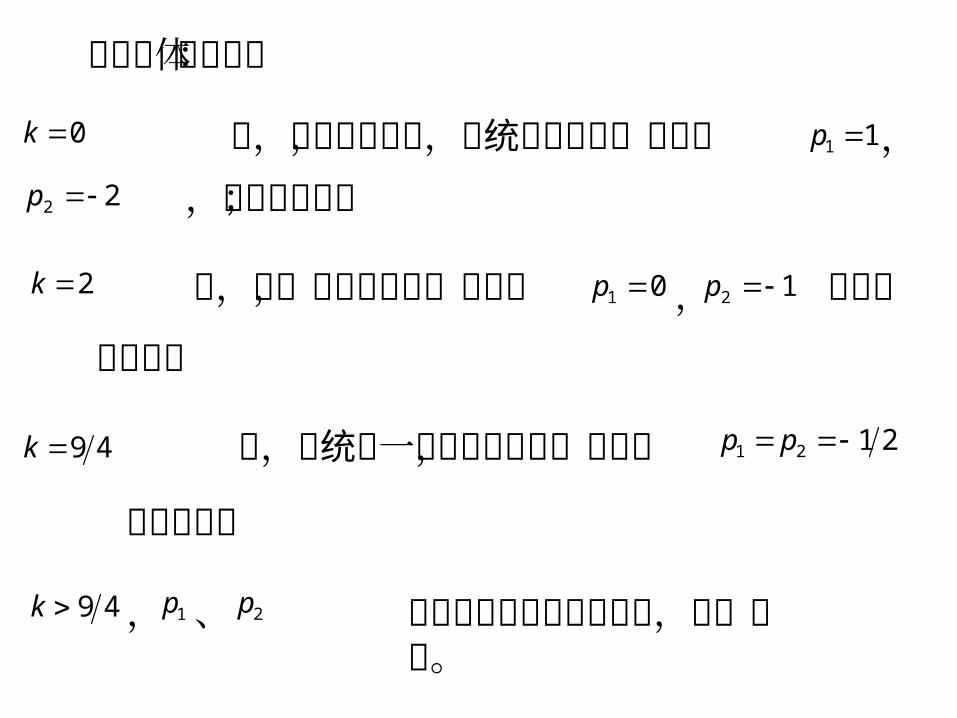
,系统不稳定;
界稳定;
为具有负实部的共轭复根,系统稳定。
代入具体值讨论:0k 11 p
22 p
2k 01 p 12 p
49k 2121 pp
49k 1p 2p
时,反馈支路开路,系统无负反馈,极点为 ,
时,系统加大了反馈,极点为 ,
, 、系统稳定;
时,系统进一步加大了反馈,极点为
系统临
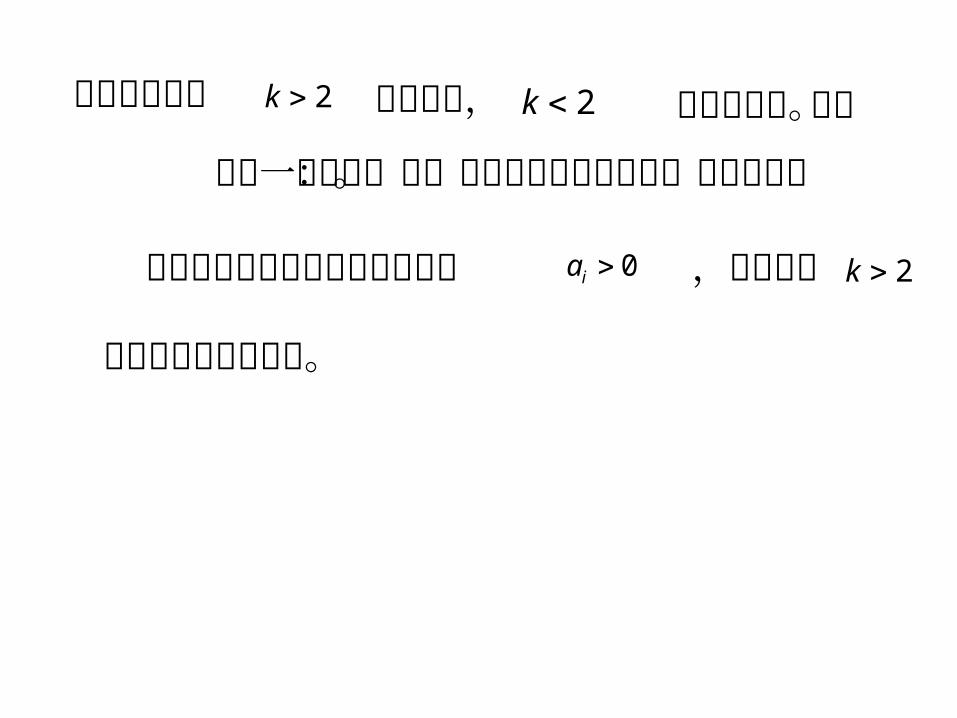
推得一般结论:系统加负反馈可以增加系统的稳定性。以上分析可知 2k 2k系统稳定, 系统不稳定。可以
系统稳定的相同结论。2k由二阶系统稳定的充分必要条件 0ia ,亦可得到
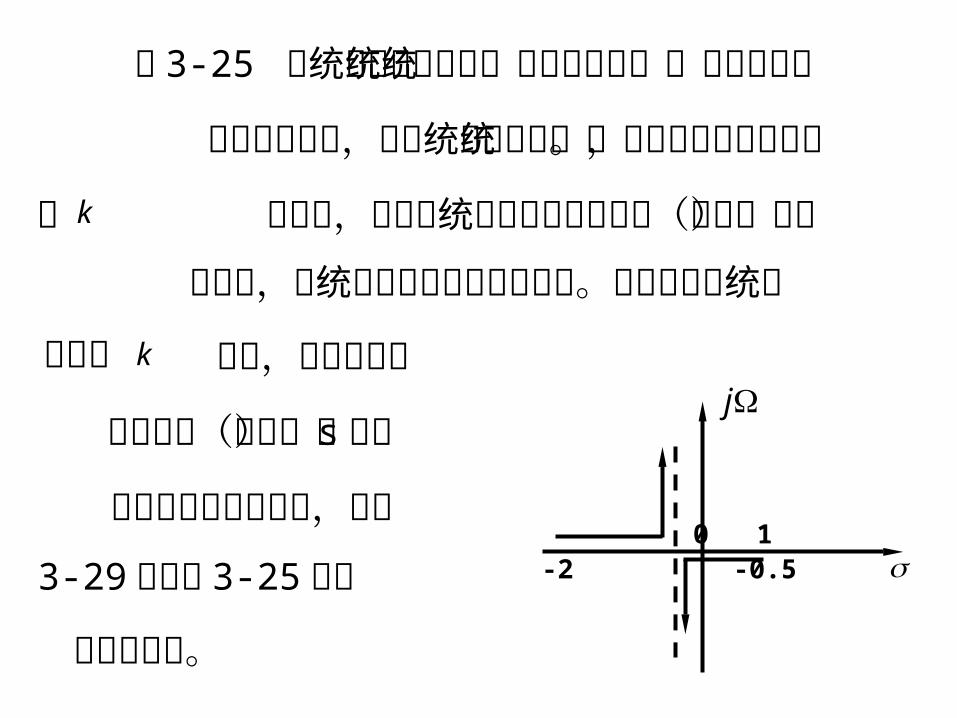
例 3-25 系统具有反馈环路,也称闭环系统。若断开系统中的反馈支路,则系统为开环系统。通过以上分析知道,当 k 变化时,闭环系统特征方程的特征根(极点)会随着变化,系统的稳定性也会发生改变。随着闭环系统函
移动的路径称根轨迹,如图3-29 就是例 3-25 系统
k数参数 变化,其特征方程
-2 -0.5
j
0 1
的根轨迹图。
的特征根(极点)在 s 平面
MATLAB 的程序,可以很方便的利用开环系统函数,由系统的根轨迹研究系统的稳定性,有独到之处。但对有若干极点的复杂系统,作根轨迹图并非易事。借助
如下作出闭环系统的根轨迹。例 3-25 根轨迹的 MATLAB 程序
a=[1 1 -2];% 开环分母多项式系数b=[0 0 1]; % 开环分子多项式系数rlocus(b,a);% 根轨迹
title(' 例 3.6-2 根轨迹 ')
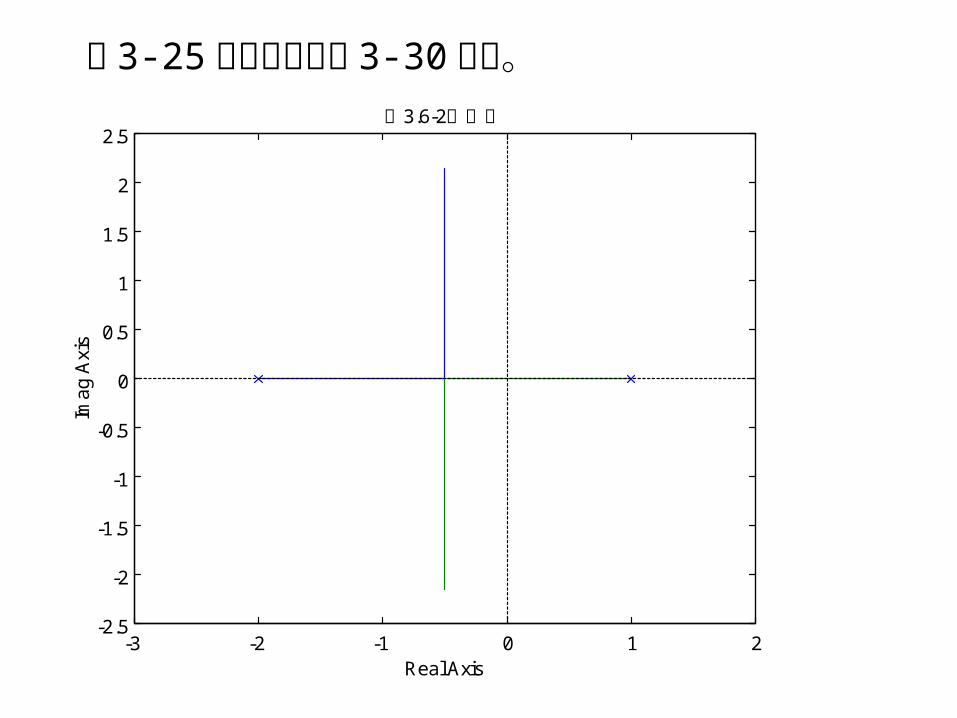
例 3-25 的根轨迹如图 3-30 所示。
-3 -2 -1 0 1 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Real Axis
Imag
Axi
s
3.6-2例 根轨迹
四、罗斯稳定性准则
确值,只要知道系统是否有正实部或零实部的特征根就
sH由上面的讨论,已知 满足稳定系统必要条件时,
项工作往往很繁,尤其求高阶系统的特征根不容易。实 sD为判断极点具体位置,需要求分母多项式 的根。这
际上为了判断系统稳定性,不需要解出方程全部根的准
否稳定。只判别具有正实部根数目的方法,可以用来判断系统是
可以。 1877年罗斯提出一种不计算代数方程根的具体值,
列数字符号相同。“罗斯阵列”排写如下:
若 011
1 asasasasD nn
nn
sD则 方程式的根全部位于 s 左半平面的充分必要条件是多项式的全部系数大于零;无缺项;罗斯阵列中第一
罗斯准则(判据)为
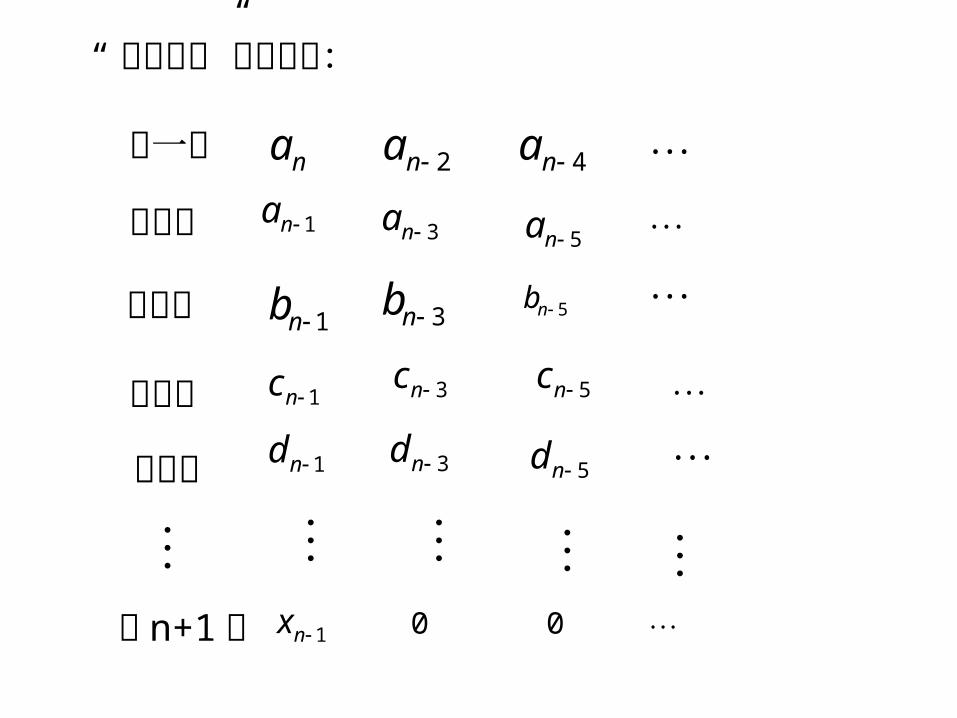
“罗斯阵列”排写如下:第一行第二行第三行第四行第五行
第 n+1 行
na 2na 4na
1na 3na 5na
1nb 3nb 5nb
1nc 3nc 5nc
1nd 3nd5nd
1nx 0 0
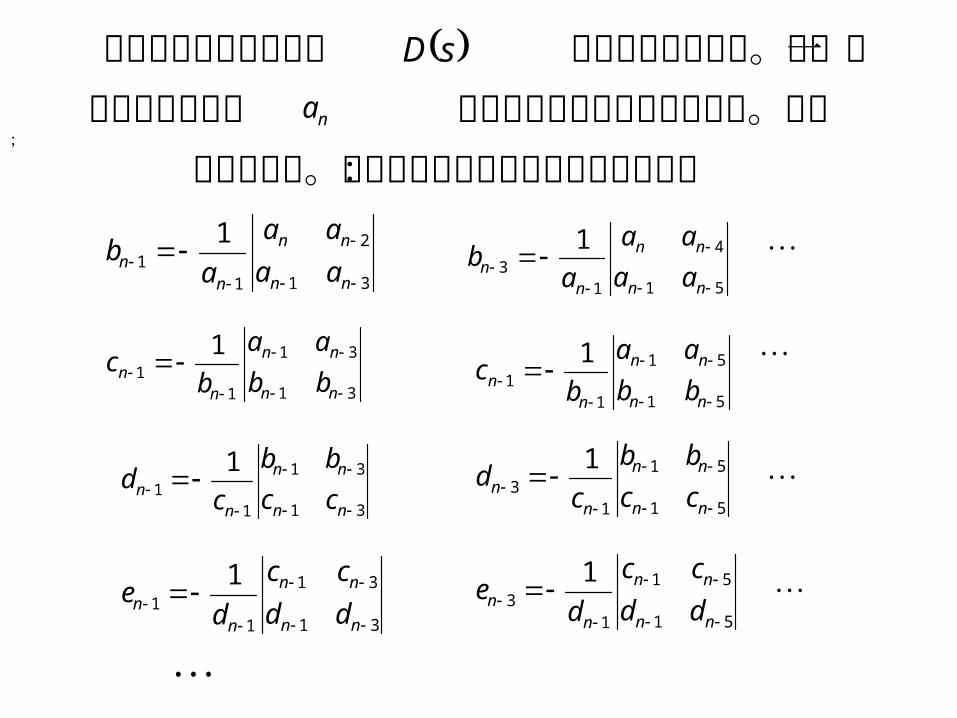
排在第二行。第三行以后的系数按以下规律计算: sD其中罗斯阵列前两行由 多项式的系数构成。第一行
由最高次项系数 na 及逐次递减二阶的系数得到的。其余
31
2
11
1
nn
nn
nn aa
aaa
b
;
51
4
13
1
nn
nn
nn aa
aaa
b
31
31
11
1
nn
nn
nn bb
aab
c51
51
11
1
nn
nn
nn bb
aab
c
31
31
11
1
nn
nn
nn cc
bbc
d51
51
13
1
nn
nn
nn cc
bbc
d
31
31
11
1
nn
nn
nn dd
ccd
e51
51
13
1
nn
nn
nn dd
ccd
e
31
31
11
1
nn
nn
nn cc
bbc
d51
51
13
1
nn
nn
nn cc
bbc
d
31
31
11
1
nn
nn
nn dd
ccd
e51
51
13
1
nn
nn
nn dd
ccd
e
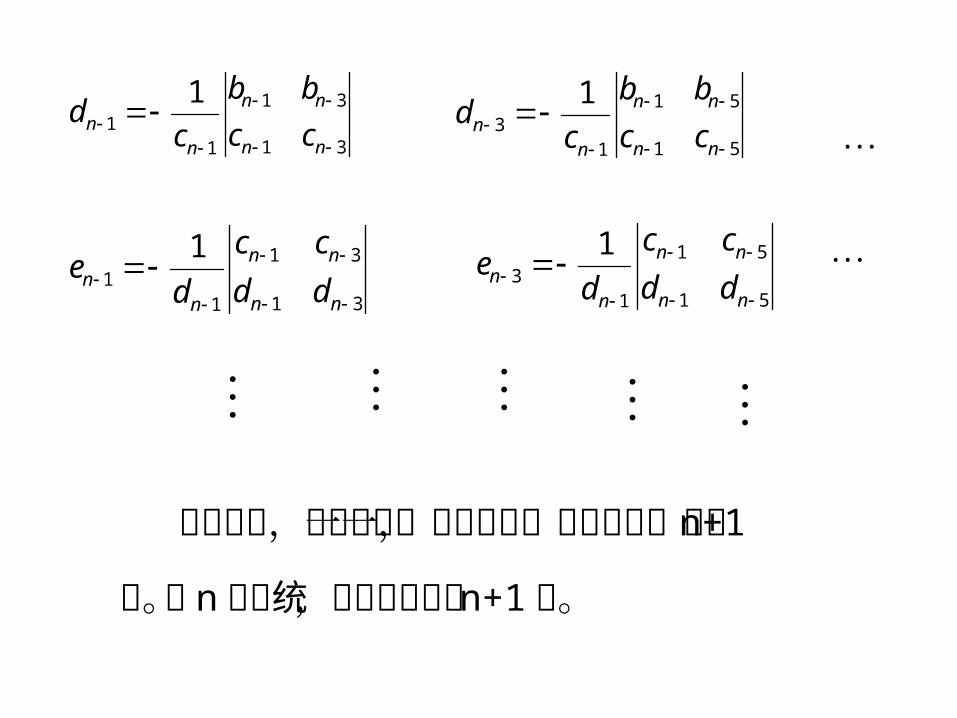
依次类推,直至最后一行只剩下一项不为零,共得 n+1
行。即 n 阶系统,罗斯阵列就有 n+1 行。
有符号不相同,则符号改变的次数就是具有正实部根的数目。
例 3-26 用罗斯准则判断下列方程是否具有正实部的根。 28122 234 sssssD
解:全部系数大于零,无缺项。n=4 ,排出 n+1=5 行。
如果第一列 11111 nnnnnn edcbaa 、、、、、 各元素数字
罗斯阵列为
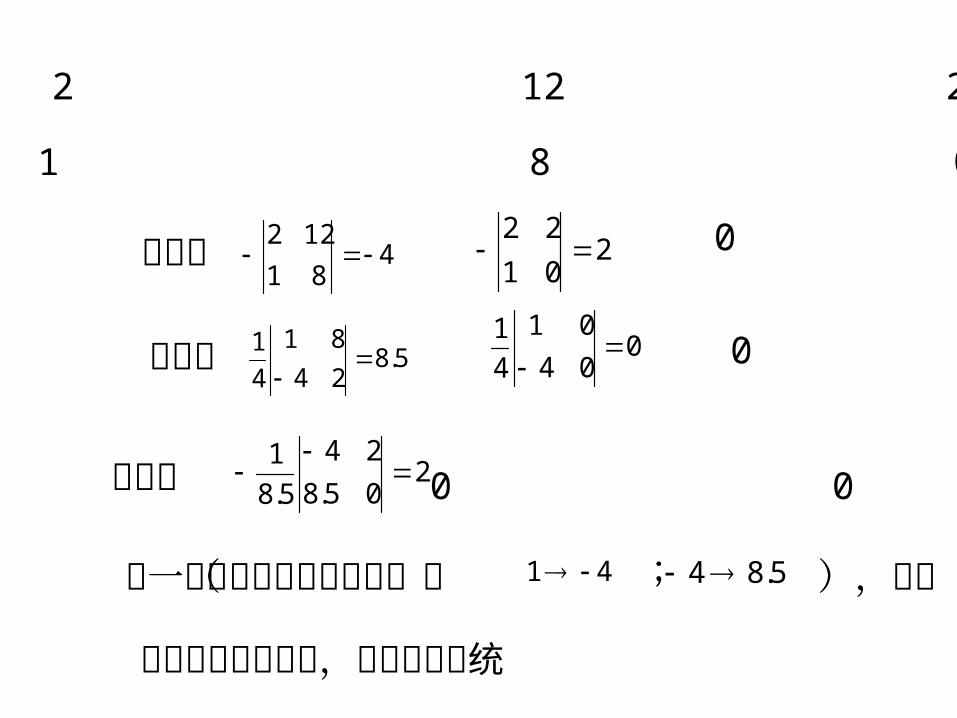
第一行 2 12 2
第二行 1 8 0
第三行第四行第五行
0
0
481
122 2
0122
5.82481
41
00401
41
0 0205.824
5.81
有两个正实部的根,为非稳定系统第一列数字两次改变符号(从 41 5.84 ; ),所以
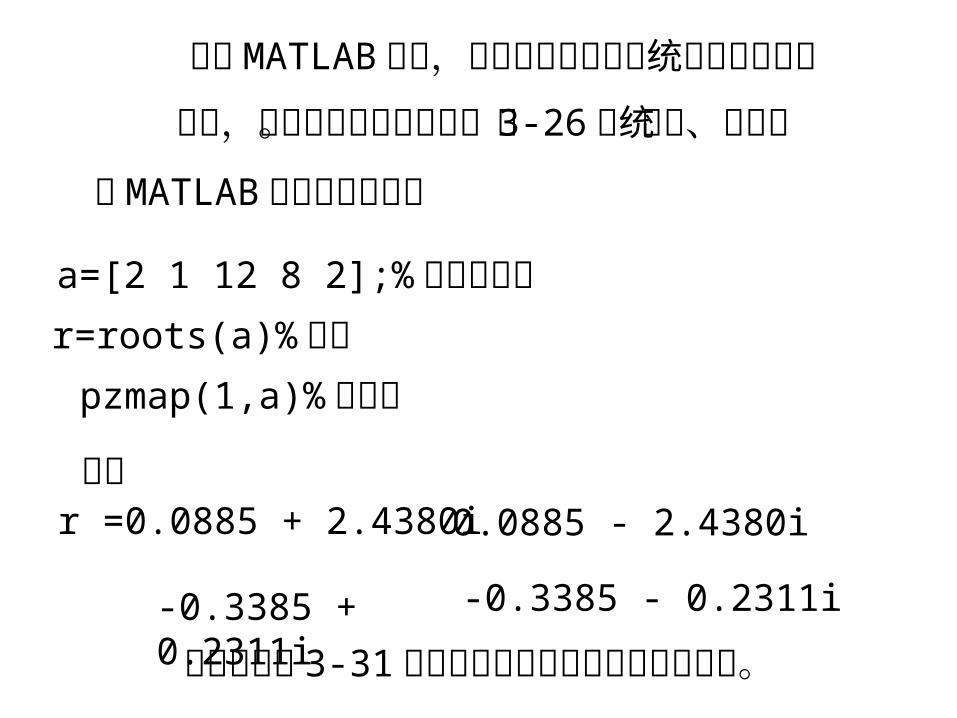
借助MATLAB 程序,求出极点并作出系统函数的极点分
的 MATLAB 程序及结果如下布图,可以验证上面的结论。例 3-26 系统的零、极点图
a=[2 1 12 8 2];% 多项式系数r=roots(a)% 极点pzmap(1,a)% 极点图
-0.3385 + 0.2311i
答案
由答案及图 3-31 可见确实有两个实部大于零的极点。
r =0.0885 + 2.4380i 0.0885 - 2.4380i
-0.3385 - 0.2311i
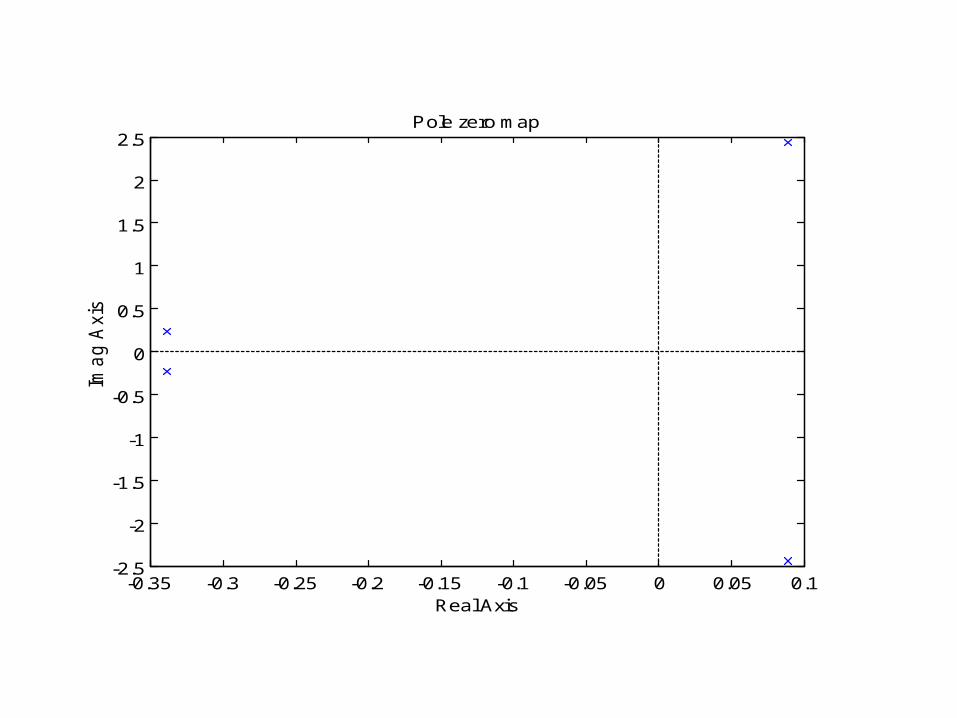
-0.35 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Real Axis
Imag
Axi
sPole zero map
§3.7 连续时间系统的模拟及流图表示在实际工作中,除了在理论上对线性系统进行数学分析
实效。
对系统的影响。这种方法往往比繁冗的数学运算更具有进行观察,以直观了解各种激励对响应的影响以及参数外,往往还通过计算机模拟(仿真)对系统的特性进行
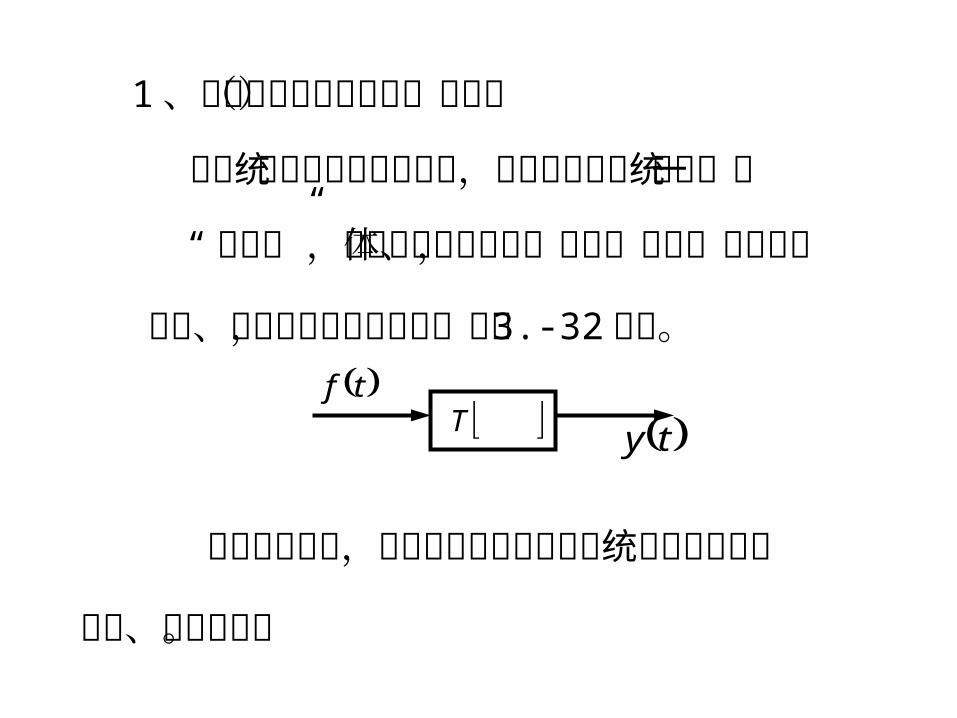
1 、连续时间系统的模拟(仿真)用系统的观点来分析问题时,我们可以把系统看做一个
输入、输出之间的转换关系,如图 3.-32 所示。“黑盒子”,不管它们内部的具体结构、参数,关心的是
ty tf
T
通过实例说明,不同的结构和参数的系统可以具有相同输入、输出关系。
+
-
+
-
+
-
+
- tf tf tuR tuC
H11
1
F1
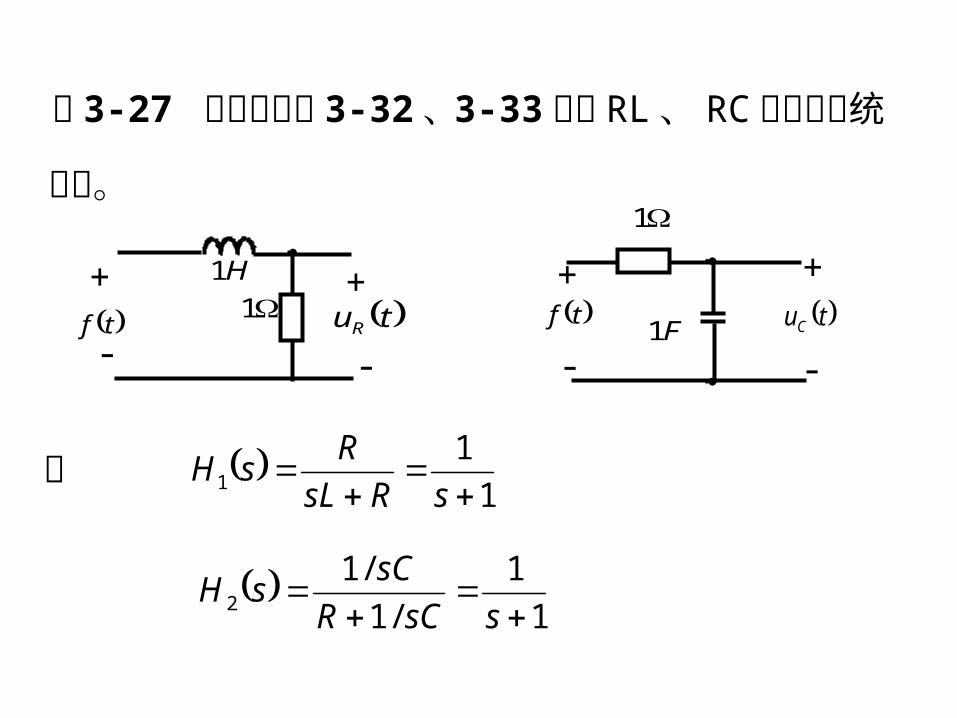
例 3-27 分别求如图 3-32、 3-33 所示 RL 、 RC电路的系统函数。
解 1
11
sRsL
RsH
1
1/1
/12
ssCR
sCsH
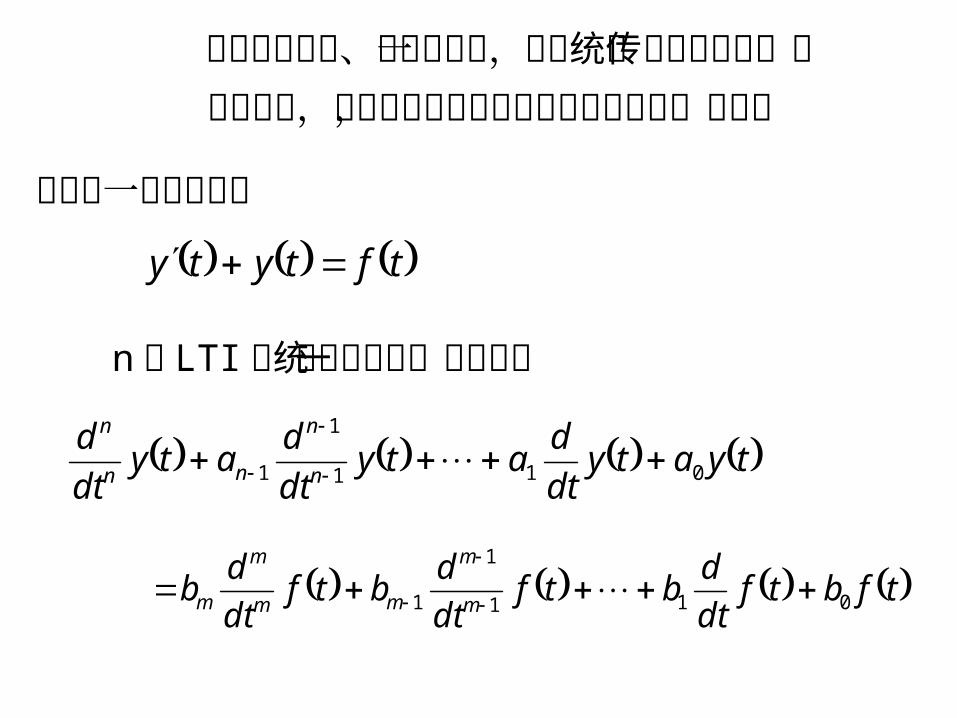
这是两个结构、参数不同的一阶系统,但由于它们传输
型都是一阶微分方程函数相同,因此它们的输入输出关系完全相同,数学模
tftyty
n 阶 LTI 系统微分方程的一般形式为 tyaty
dtdaty
dtdaty
dtd
n
n
nn
n
011
1
1
tfbtfdtdbtf
dtdbtf
dtdb m
m
mm
m
m 011
1
1
其系统函数为
011
1
011
1
asasasbsbsbsb
sFsYsH n
nn
mm
mm
要对连续 LTI 系统进行模拟 , 就要对它的系统传输函数或
为此可以选择实际上容易实现的结构进行模拟入输出关系的系统,系统实现的结构、参数不是唯一的,微、积分方程进行模拟。从上面的例子知道具有相同输
用三种基本运算,就可对 LTI 系统微分方程式的运算关系
基本运算的模拟开始。程描述 , 亦可由基本运算器组成的模拟图描述。下面先从器、积分器。描述系统的输入、输出关系既可用数学方
它们对应着三种基本模拟运算器件:加法器、标量乘法作系统模拟。这三种基本运算是加法、标量乘法与积分。
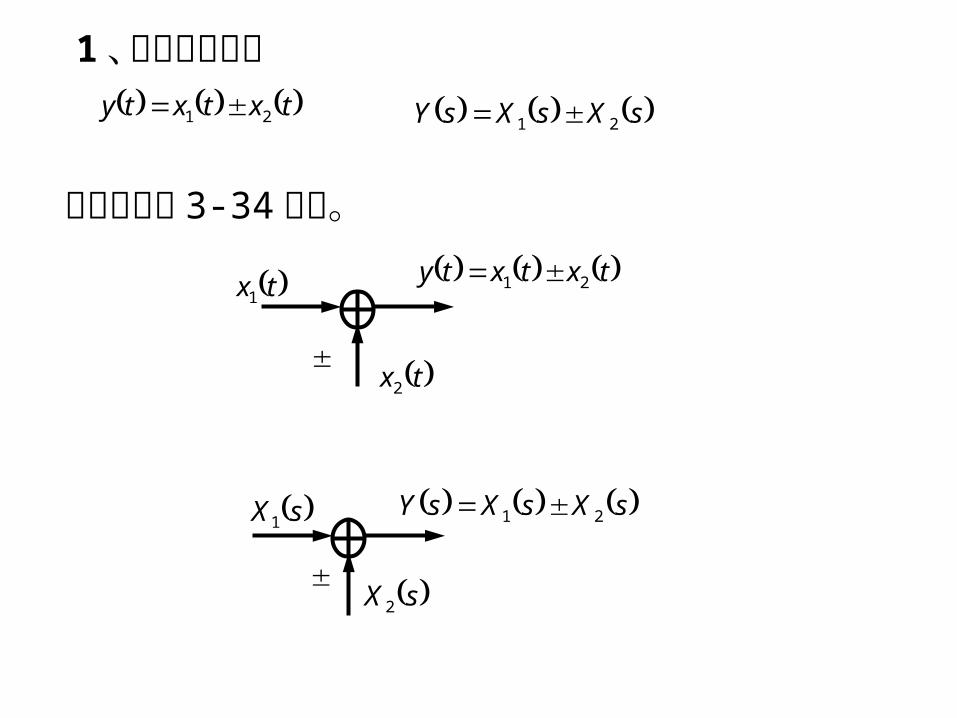
加法器如图 3-34 所示。
1、加法运算关系 txtxty 21 sXsXsY 21
txtxty 21
tx2
tx1
sXsXsY 21
sX 2
sX1
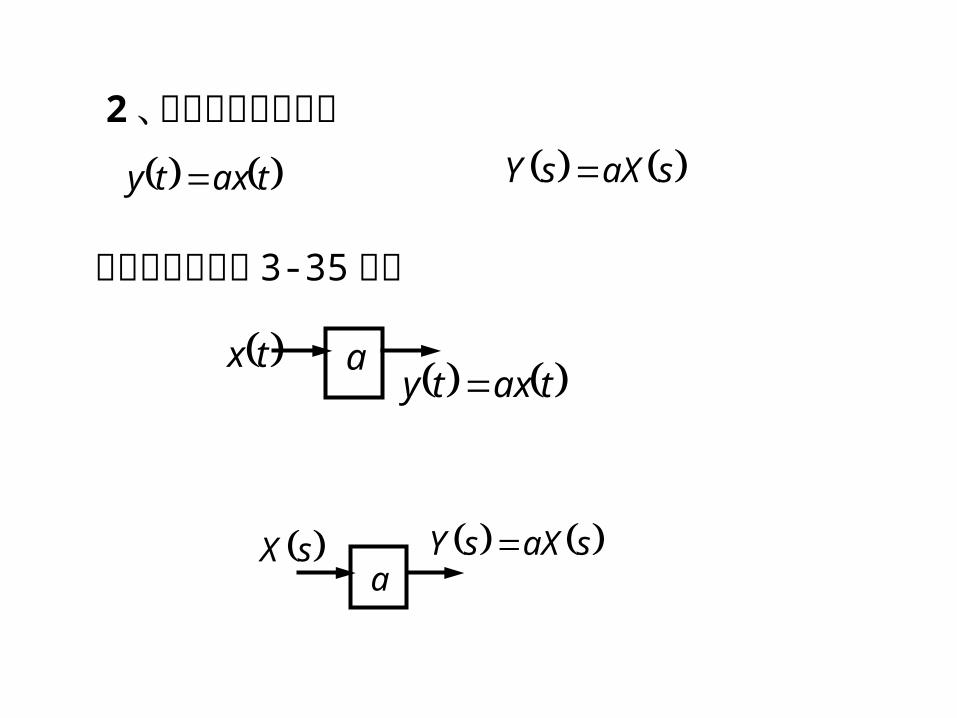
2、标量乘法运算关系
标量乘法器如图 3-35 所示 taxty saXsY
taxty a tx
a saXsY sX
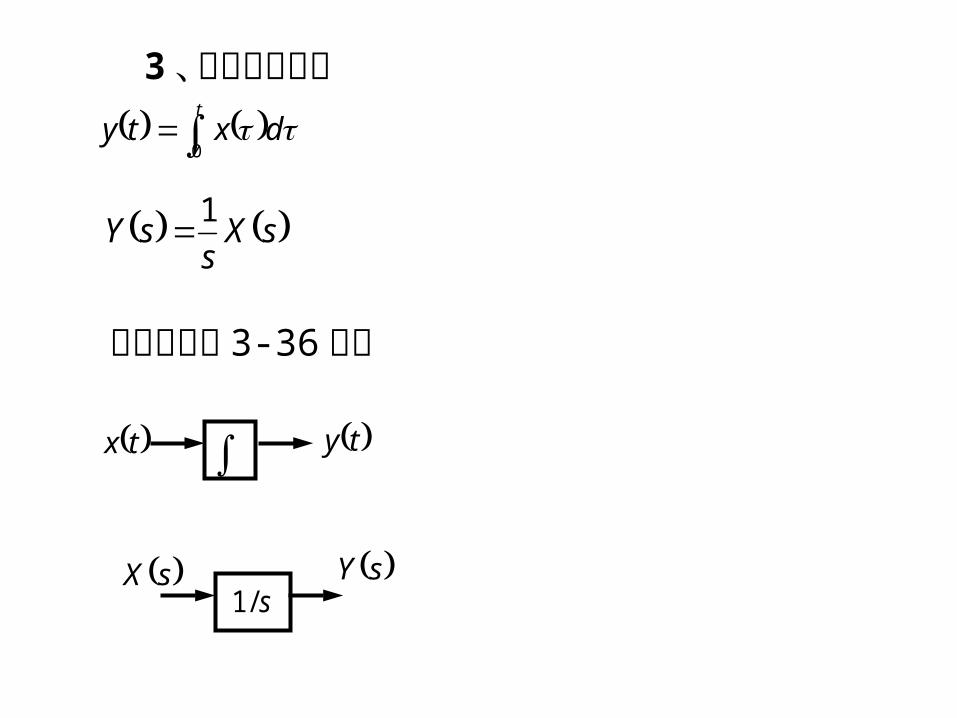
3、积分运算关系
积分器如图 3-36 所示
dxtyt
0
sXs
sY 1
ty tx
s/1 sY sX
2、系统模拟的直接形式 (微分方程形式 )
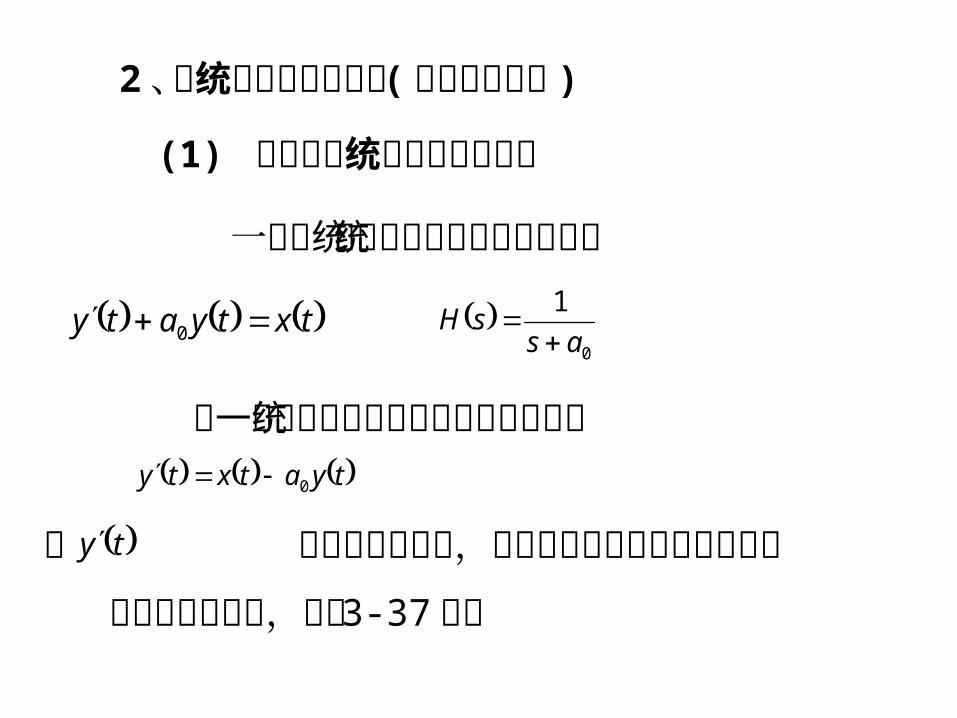
(1) 全极点系统模拟的直接形式一阶系统的微分方程及系统函数表示
txtyaty 0 0
1as
sH
将一阶线性线性系统的微分方程改写为 tyatxty 0
ty
与复频域模拟图,如图 3-37 所示将 做为积分器输入,得到用基本运算器组成的时域
ty tx 0a
sY sX s/1
0a
0
1as
sH
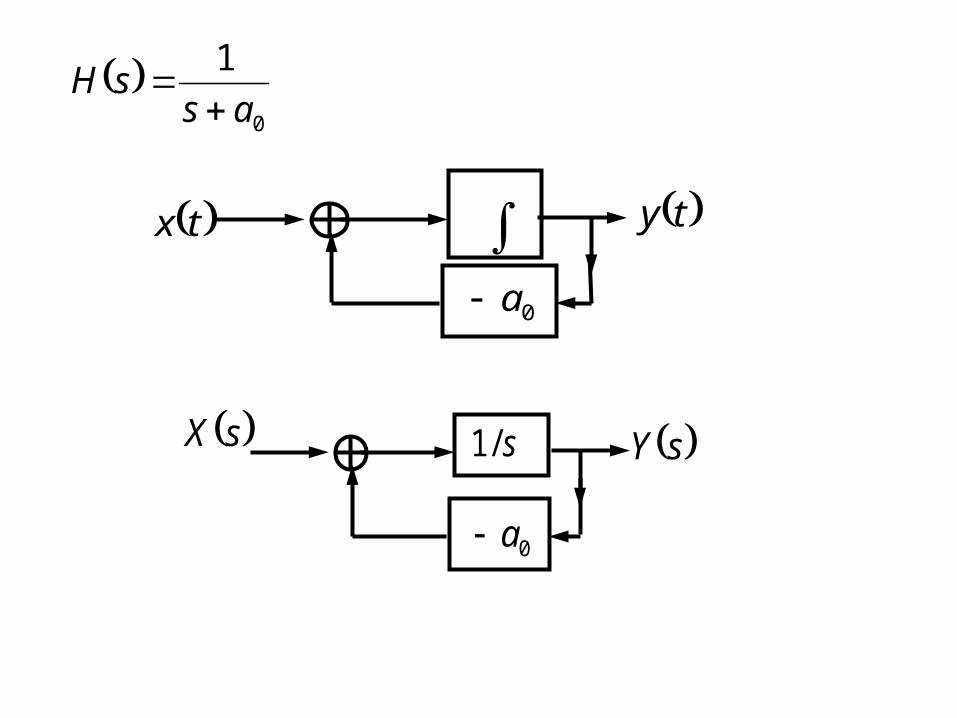
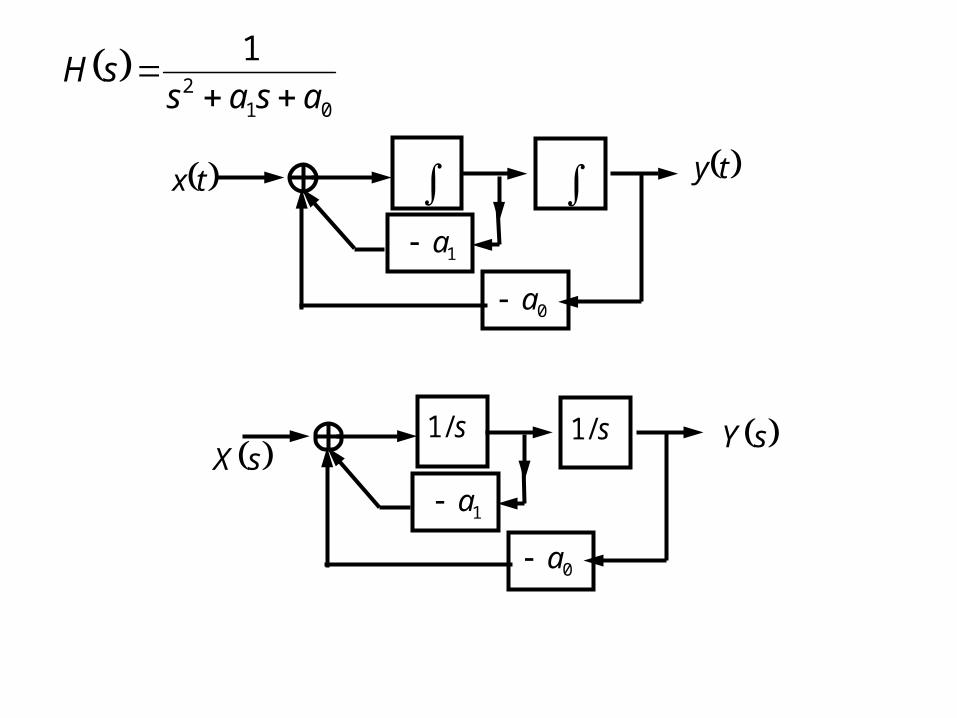
一阶系统模拟的方法可推广至全极点的二阶系统模拟,其微分方程及系统函数为
txtyatyaty 01
01
2
1asas
sH
改写微分方程 tyatyatxty 01
如图 3.-38 所示。积分器的输入为, ty ty ty、 经两次积分得到 ,其模拟
ty tx 1a
0a
sY sX
1a
0a
s/1 s/1
01
2
1asas
sH
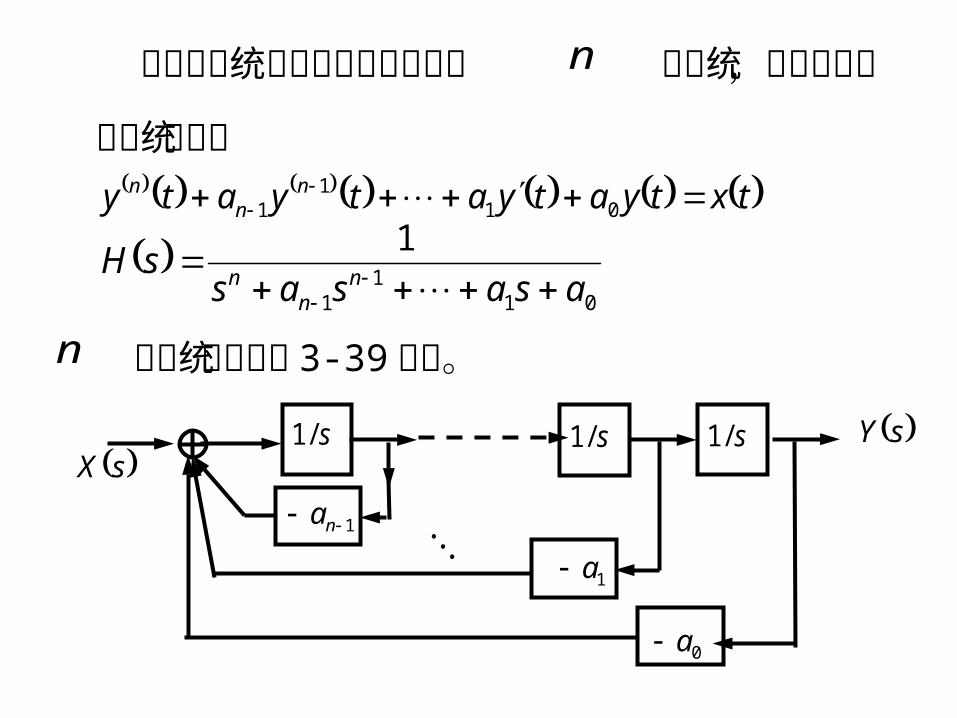
n由二阶系统模拟可推广至全极点及系统函数为
txtyatyatyaty nn
n 01
11
01
11
1asasas
sH nn
n
阶系统,其微分方程
n阶系统模拟如图 3-39 所示。 sY
sX
1a
0a
s/1 s/1 s/1
1 na
2、一般系统模拟的直接形式以上模拟实现了系统的极点,实际系统除了极点之外,
将上式改写为
式 3.7-8 的模拟如图 3-40 所示
一般还有零点。例如一般二阶系统的系统函数为
012
012
2
asasbsbsbsH
20
11
20
112
1
sasasbsbbsH
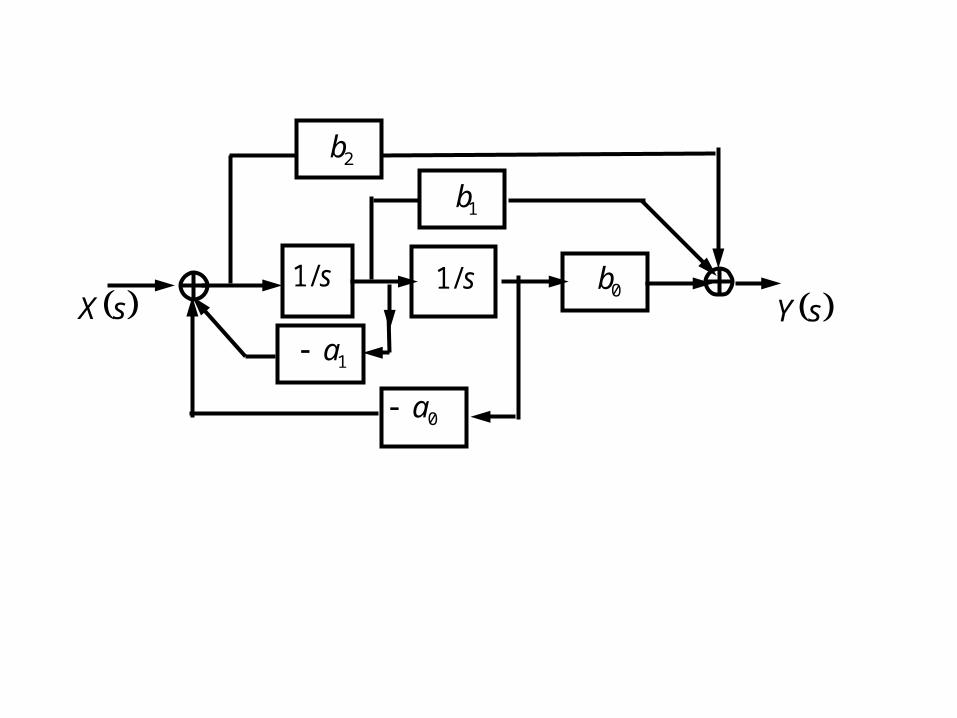
sY sX
1a
0a
s/1 s/1 0b
2b
1b
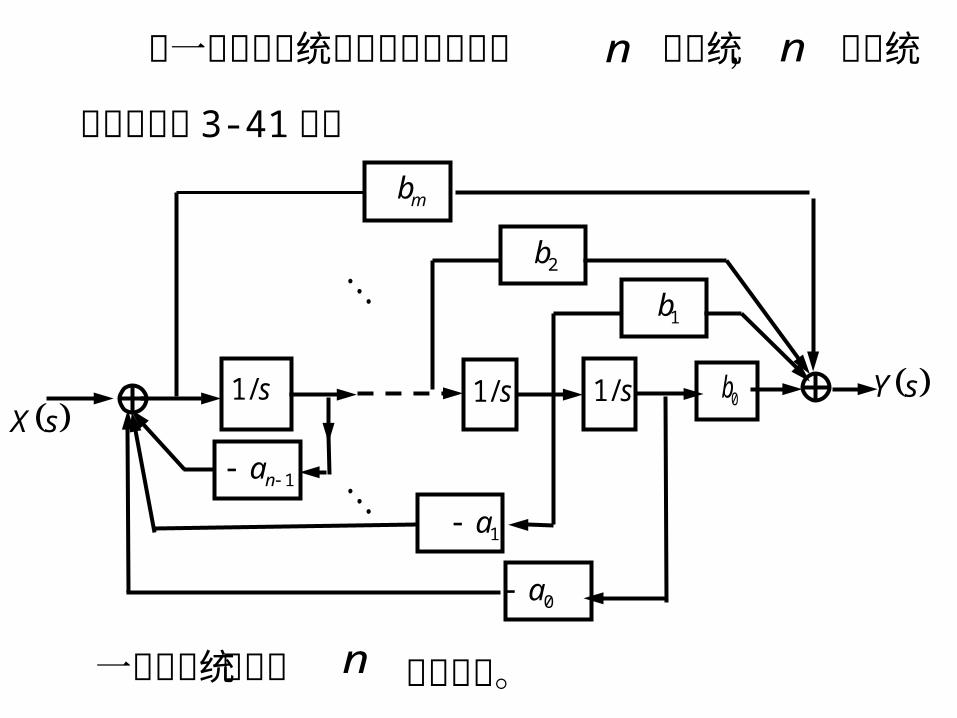
由一般二阶系统的模拟不难推广到的模拟如图 3-41 所示
阶系统,n n 阶系统
一般阶系统模拟有 n个积分器。
sX sY
1a
0a
s/1 s/1 s/1
1 na
0b
2b
1b
mb
在系统模拟图中, 0 ji ba 1 ji ba
时,实际为短路。时,实际为开路;
3、其他形式的模拟复杂系统往往由多个子系统组成,常见的组合形式有
通常用方框图表示子系统与系统的关系。可以简化复杂系统的表示,突出系统的输入输出关系,子系统的级联、并联、混联、反馈等。由于用方框图
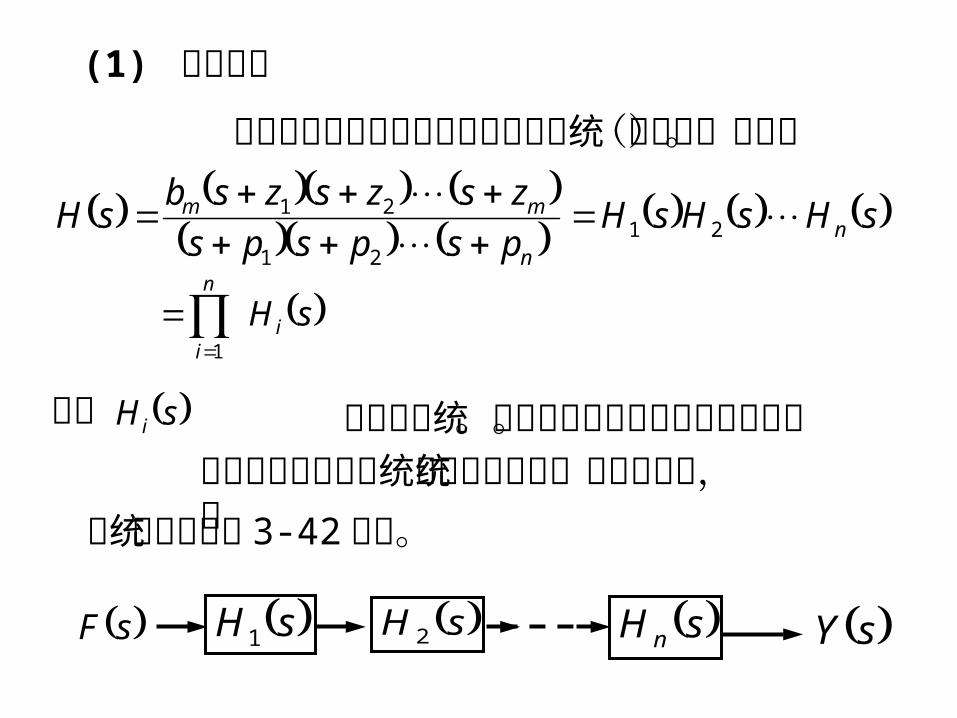
(1) 级联形式级联模拟实现方法是将分解为子系统(基本节)相乘。
是的子系统。也有将级联形式称为串联形式。上式表明级联的系统函数是各子系统函数的乘积,子
sHsHsH
pspspszszszsbsH nn
mm
2121
21
sH i
n
i
1
sH i式中系统的级联如图 3-42 所示。
sH1 sH n sH 2 sY sF
子系统模拟的基本形式有两种,一是实单极点的一阶模
将各子系统串联起来 , 可得系统模拟图,称为级联模拟图。则是系统内所有参数为实数。利用基本形式的模拟,再拟,二是共轭极点组成的二阶模拟,子系统模拟构成原
213
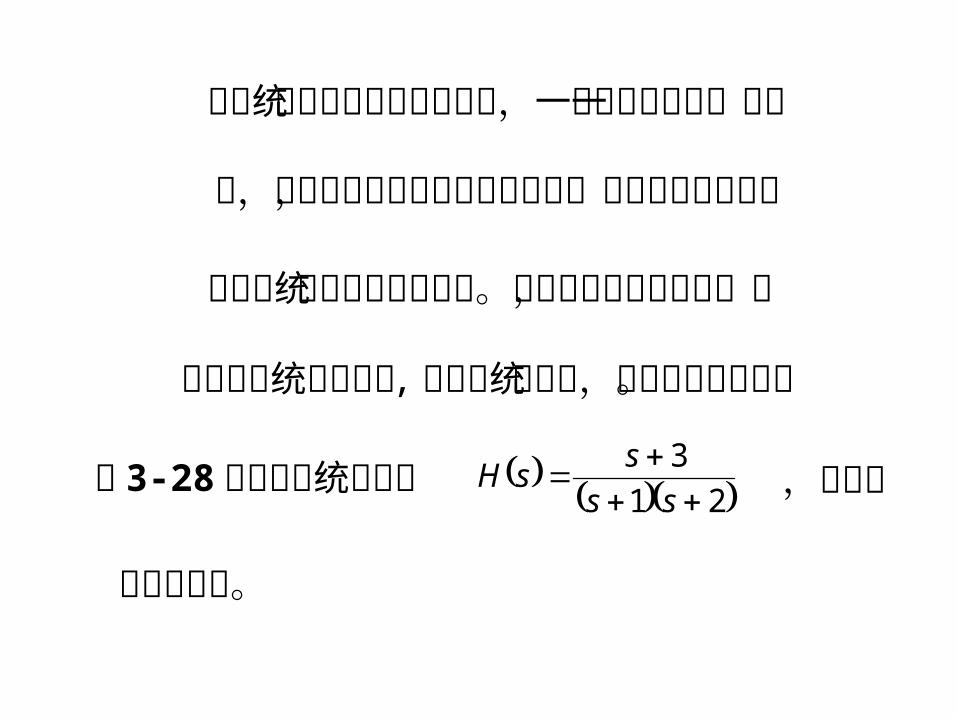
ssssH例 3-28 已知某系统函数为
级联模拟图。,画出其
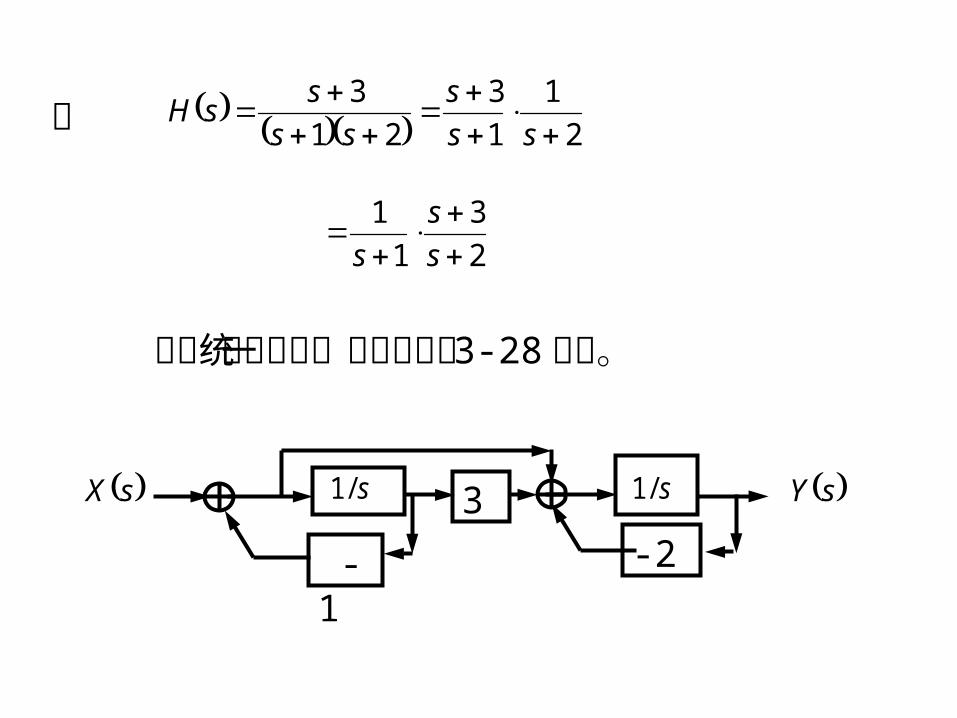
解 21
13
213
sss
ssssH
子系统的级联的一种形式如图 3-28 所示。
-1
3-2
s/1 s/1 sX sY
23
11
ss
s
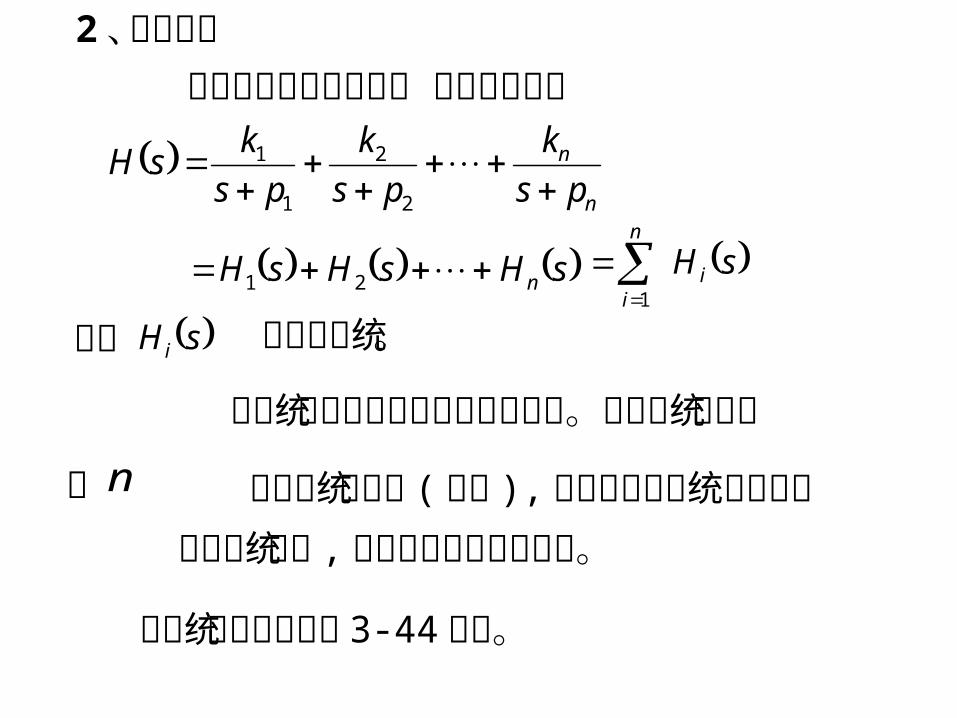
2、并联模拟并联模拟实现方法是对 部分分式展开
是的子系统。子系统模拟的基本形式同级联模拟。整个系统可以看个子系统的迭加 ( 并联 ), 其中每个子系统可按上面
n
n
psk
psk
psksH
2
2
1
1
sH i
n
i
1
sHsHsH n 21
sH i式中
成 n
的子系统模拟 , 这种形式称为并联形式。子系统的并联图如图 3-44 所示。
┇
sH n
sH 2 sY sF
sH1
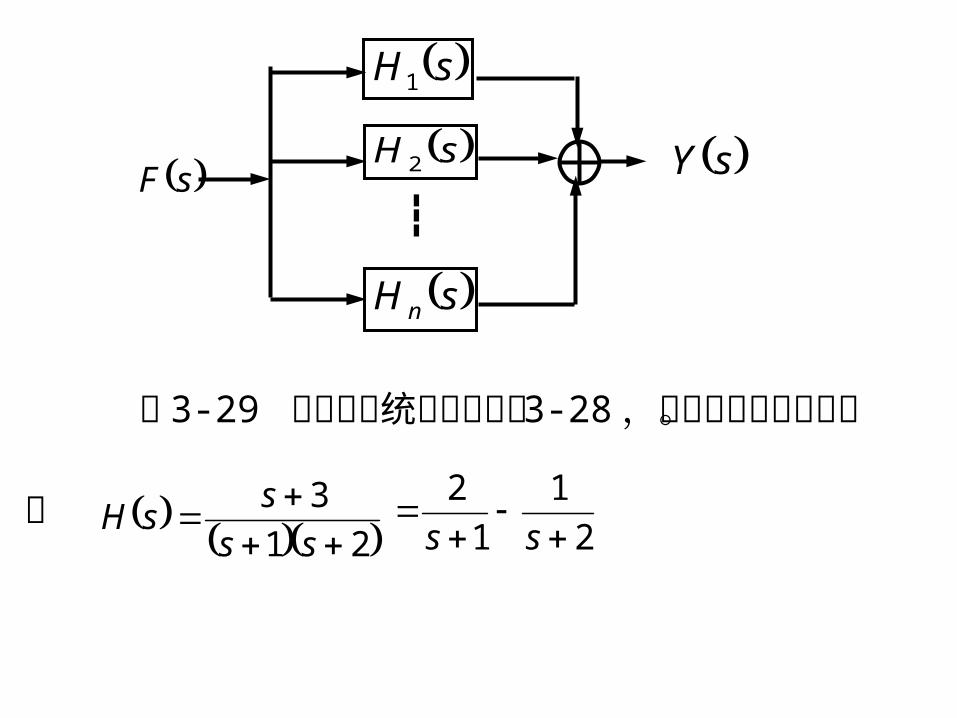
例 3-29 已知某系统函数为同例 3-28 ,画出其并联模拟图。解 21
3
ssssH 2
11
2
ss
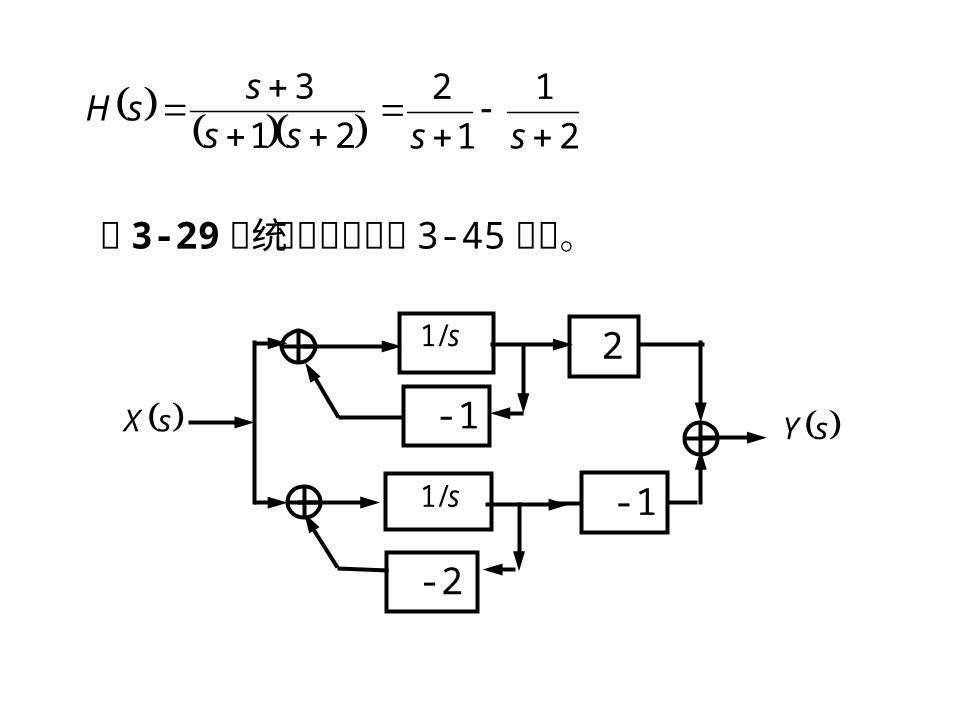
213
ssssH
21
12
ss
例 3-29 系统的并联式如图 3-45 所示。
-1
2
-2
-1s/1
s/1
sX sY
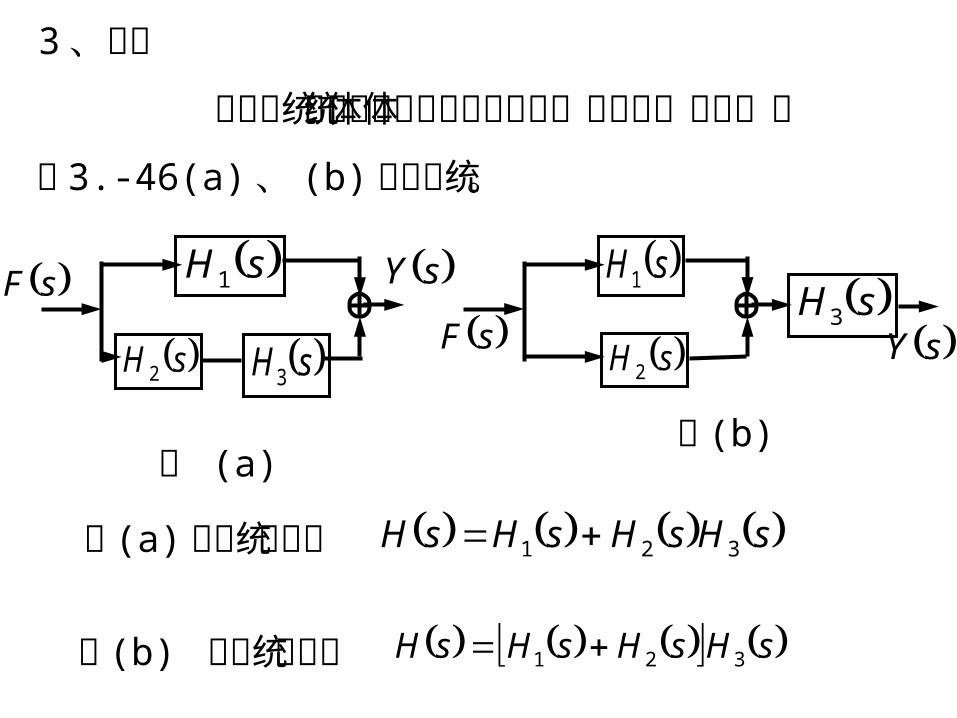
3 、混联混联系统的系统函数计算要根据具体情况具体对待。如
图 (b) 的系统函数为
图 (a)
图 3.-46(a) 、 (b) 所示系统。
图 (a) 的系统函数为
sH1 sH3
sH 2 sY sF sH3 sH 2
sY sF sH1
图 (b)
sHsHsHsH 321
sHsHsHsH 321
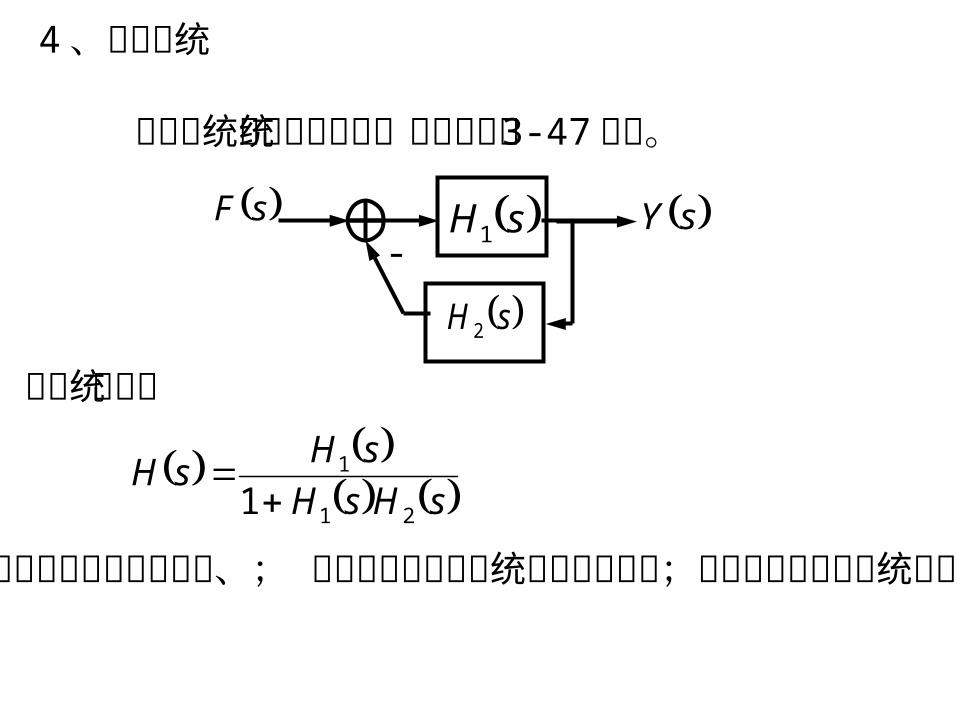
4 、反馈系统由子系统组合的反馈系统方框图如图 3-47 所示。
各种模拟方法的实现不同,调整的参数有所不同。例如,微分方程 (直接形式 ) 可调整的是微分方程的系数、; 级联形式可调整系统的极点与零点;并联形式可调整系统的极点与留数。 在实际工作中可根据各种因素 ,适当选择模拟方式达到较好的系统设计效果。
其系统函数为 sH 2
sY sF sH1-
sHsH
sHsH21
1
1
各种模拟方法的实现不同,调整的参数有所不同。例如,ia jb
统的极点与留数。 在实际工作中可根据各种因素 ,适当选
微分方程 (直接形式 ) 可调整的是微分方程的系数 ;、级联形式可调整系统的极点与零点;并联形式可调整系
择模拟方式达到较好的系统设计效果。
4、连续系统的信号流图表示在方框图中,系统函数可以由各子系统与连接方式决定。
可以将方框图与模拟图再加以简化。定。方框图和模拟图表示还不是最简表示,用信号流图在模拟图中,系统函数可以由各基本器件与连接方式决
统的具体处理方法是:用带箭头的有向线段代替模拟图
个节点的,表示相加或相减(传递系数有负号)。传递系数直接标在箭头旁;有两个以上有向线段指向一与输出;线段箭头的方向是信号传输的方向,原方框的中的方框;线段的两个端点是节点,表示原方框的输入
信号流图是用节点与有向支路描述系统。用流图表示系
前面的方框图与模拟图都可以用流图表示,例如 二阶系统的流图如图 3-48 所示。
sY sX
1a
0a
s/1 s/1
0b
2b 1b
n 阶系统模拟的流图如图 3.-49 所示
sY sX
1a
0a
s/1 s/1 s/1
1 na 0b
2b1b
mb

例 3-28 的流图如图 3-51 所示。s/1 s/1 sX sY3
-1 -2
例 3-29 系统的级联流图如图 3-53 所示。
s/1
s/1
sX sY
-1
-2
-1
2