クイーン・ヴィクトリア...就航:2007年 船籍:英領バミューダ 巡航速度:18ノット (最大23.7ノット) 総トン数:90,000トン 乗客定員数:1,990人
Upload
owen-hollandCategory
view
90download
0description

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
Robot and Servo Drive Lab.
具模糊控制之具模糊控制之巡航定速巡航定速
學生:黃建智 老師:王明賢 教授日期: 2012/04/20

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
大綱大綱
巡航定速介紹 變結構馬達概述 行車阻力之分析與探討 模糊控制之巡航定速設計 系統架構
Robot and Servo Drive Lab. 2

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
巡航定速巡航定速介紹介紹
巡航定速( Cruise Control ),是安裝在汽車中能夠自動控制車輛行駛速度的裝置。也被稱為速度控制( Speed Control )或自動巡航( Autocruise )。
行駛過程中,駕駛員可以啟動巡航定速,之後不需再踩油門,車輛既可按照一定的速度前進。在巡航定速啟動後,駕駛員也可通過巡航定速的手動調整裝置,對車速進行小幅度調整,而無需踩油門。
在平緩的道路上,使用巡航定速可以保持車輛勻速行駛,減少耗油量;在長途駕駛時,巡航定速裝置可以把駕駛員的腳從油門踏板上解放出來,從而減少疲勞程度。
Robot and Servo Drive Lab. 3

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
變結構馬達概述變結構馬達概述 -- 各結線繞組之電氣特各結線繞組之電氣特性的差別性的差別
Robot and Servo Drive Lab. 4
wye 結線之電氣阻抗為 delta 結線的 3倍
)(2
1_ RLs
eVi Ys
Ybus
等效電路等效電路
U+
V+ W+
+
_
+
_
+
_
U+
V+W
+
+
+
+
_
_
_
2L2R
ibus_YVs
Ye eL3
2R
3
2
ibus_Δ
Vs
)(2
3_ RLs
eVi sbus

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
變結構馬達概述變結構馬達概述 -- 變結構馬達變結構馬達
的電氣特性的電氣特性
Robot and Servo Drive Lab. 5
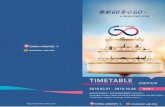
Wye 結線之等效反電動勢常數為Delta 結線的 1.732 倍
Ytt KK __3
1
理論之曲線
受限電流所能達到之最大轉矩
Wye結線Delta結線
速度
轉矩
_topT
YtopT _
Ytit
Y
KI
T
_lim
max_
Ye
sY K
V
_max_
_lim
max_
tit KI
T
_max_
e
s
K
V
較小之轉矩常數與反電動勢常數(Delta結線)
速度
轉矩 較大之轉矩常數與反電動勢常數(Wye結線)
Wye 結線:低速高扭力 Delta 結線:高速低扭
力
Y
Y
T
TT
max_max_
max_max_
3
3
Ybusss
bus iR
V
R
Vi __ 3
23
)32
(
TP moutput
tbus KiT
ems KV

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 行車阻力組行車阻力組
成元素成元素
Robot and Servo Drive Lab. 6
Fa
Fg
Fr
Fac
空氣阻抗
加速阻抗
滾動阻抗
爬坡阻抗

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 行車阻力組行車阻力組
成元素成元素
滾動阻抗 (Rolling resistance) :此阻抗係由車輪滾動時,輪胎與地面接觸所產生摩擦阻力,故稱為滾動阻抗
Robot and Servo Drive Lab. 7
路面狀況 路面狀況良好柏油平滑路面 0.010 經整理平坦未鋪路面 0.04
良好水泥平滑路面 0.011 未經整理多石路面 0.08
良好粗石平華路面 0.014 新鋪設砂石路面 0.12
良好鋪磚路面 0.018 沙或石質路面 0.16
良好鋪石路面 0.020 鬆弛沙、黏土路面 0.3
rr gMF cos rF
M
rg
:滾控阻抗 (N) :滾控阻抗係數:車重 (Kg) :重力加速度 (9.8m/s2)
:爬坡角度 (degree)

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 行車阻力組行車阻力組
成元素成元素
空氣阻抗 (air resistance) :空氣阻抗阻要是與行車時的車速成平方正比關係
Robot and Servo Drive Lab. 8
測試車參考車重 ( 含騎乘者 )(kg) 慣性模擬車重 C
0~105 100 0.328
105~115 110 0.334
115~125 120 0.340
125~135 130 0.346
135~145 140 0.352
145~155 150 0.358
155~165 160 0.364
165~175 170 0.370
175~185 180 0.376
2vCF da
:空氣阻抗 (N)
:風阻係數 (Ns2/m2)
:車速 (m/s)
aF
dC
v

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 行車阻力組行車阻力組
成元素成元素
爬坡阻抗 (grade resistance) :當車輛爬坡時重力在斜坡方向之分力極為爬坡阻抗
加速阻抗 (acceleration resistance) :當車輛克服了滾動阻抗、空氣阻抗與爬坡阻抗後,剩餘之驅動力即是用來作為車輛的加速力
Robot and Servo Drive Lab. 9
a
aMFac
:加速阻抗 (N)
:加速阻抗 (N)
:為車重 (kg)
:加速度 (m/s2)
:爬坡角度 (degree)
M
acF
gF
sin gMFg

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 克服行車阻克服行車阻
力所需扭力計算力所需扭力計算
輸入已知固定參數值 ( 車重 50kg 、成人 75kg 、物重 25kg) ( 良好的柏油平滑路面 )
(150kg 下空氣阻抗係數 )
輸出值
「車速」與「克服行車阻力所需的扭力 T 」 克服行車阻力所需的扭力 T (N . m) = 行車阻抗 Fd (N) × 輪胎半徑 R (m)
= 轉矩常數 Kt × 輸入電流 ibus(A)
Robot and Servo Drive Lab. 10
aMgMVCgM
FFFFF
r
acgard
sincos 2
22/mNs 358.0C
m 203.02/0254.016 R
kgM 15001.0r

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 小輕型載具小輕型載具
參考指標參考指標
Robot and Servo Drive Lab. 11
項目 輕型等級 小型輕型等級
整車
安全性能 符合 TES-0A-08-01 或 TES-0A-08-02 電動機車抽換式電池安全準則要求
符合 TES-0A-10-01 電動機車特殊安全規範及試驗法要求
爬坡性能 18% 斜坡每小時達 10 公里以上 12% 斜坡每小時達 10 公里以上
最高車速 平坦路面每小時達 45 公里以上 平坦路面每小時達 25 公里以上
加速性能 0 至 100 公尺,加速時間 12 秒以下
0 至 50 公尺,加速時間 9 秒以下
續航性能 變速行駛續航距離 30 公里以上 變速行駛續航距離 30 公里以上
耐久性 加速劣化行駛測試 3500 公里以上
且無故障等級 A類之故障
加速劣化行駛測試 2300 公里以
上且無故障等級 A類之故障
參考指標為 , , 。
0 20 m/sa 25 km/hrv
參考指標為 , 。 7 20 m/sa
參考指標為 , 。 0 21.23 m/sa
來源:「電動機車性能、安全補助標準及相關測試規範」修正案,經濟部工業局,2010/08/25 公布並生效

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 不同道路狀不同道路狀
況之行車阻力況之行車阻力
Robot and Servo Drive Lab. 12
12% 斜坡每小時達 10 公里以上
平坦路面每小時達 25 公里以上
輸入電壓: 48V輸入電流: 40A

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
行車阻力之分析與探討行車阻力之分析與探討 -- 不同道路狀不同道路狀
況之行車阻力況之行車阻力
Robot and Servo Drive Lab. 13
0 至 50 公尺,加速時間 9 秒以下

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University Robot and Servo Drive Lab. 14
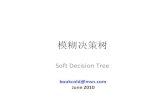
平地之阻力曲線
最大坡度之阻力曲線
速度
轉矩
所能產生加速度的轉矩
定轉矩區 定功率區
最大加速之阻力曲線
max_Ymax_
YTmax_
max_T
轉矩
速度
行車阻力曲線
switchmax_Ymax_
YTmax_
max_T
轉矩
速度
行車阻力曲線
switch
行車阻力之分析與探討行車阻力之分析與探討 -- 不同道路狀不同道路狀
況之行車阻力況之行車阻力

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
模糊控制之模糊控制之巡航定速設計巡航定速設計-- 模糊控制器架構模糊控制器架構
模糊控制器的工作原理與一般傳統控制器之不同,在於一般傳統控制器的輸入值通常為一個明確值,輸出也是明確值才能對受控體產生作用。
模糊控制器則是以語言化的模糊規則為主體,則必須先將輸入值模糊化,經過推論單元推理所得到的結果將其解模糊化,得到精確值。
Robot and Servo Drive Lab. 15
資料庫 規則庫
模糊化介面 推論引擎 解模糊化介面 受控體+
-
初始命令
回授值
模糊控制器基本架構圖

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
模糊控制之模糊控制之巡航定速設計巡航定速設計-- 速度迴路架構圖速度迴路架構圖
Robot and Servo Drive Lab. 16
速度估測
模糊控制器 六步方波Fe
( 1)se k
PWM
( )se k
sensor hall
馬達
速度迴路架構圖

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
模糊控制之模糊控制之巡航定速設計巡航定速設計-- 模糊控制器設計模糊控制器設計
速度迴路主要目標就是系統依最新所估測之馬達轉速計算出與預定轉速差異值後,輸出一速度修正值。
Robot and Servo Drive Lab. 17
Fuzzy Logic
Controller
)(kes
)1( kes
)(keF
模糊控制器輸入輸出變數示意圖
)(kes
)1( kes
:速度誤差
:前次速度誤差:補償速度命令
)()()( * kkke rmrms
*rm
rm
:速度命令
:馬達回授速度
)(keF

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
模糊控制之模糊控制之巡航定速設計巡航定速設計-- 定義模糊集合的歸屬函數定義模糊集合的歸屬函數
Robot and Servo Drive Lab. 18
歸屬函數 歸屬函數
歸屬函數
60 3 9 12 rpm
11E 4
1E21E 3
1E 51E
100 5 15 20 rpm
12E 2
2E 32E 4
2E 52E
11K 2
1K 31K 4
1K
40 2 6 8 rpm
51K
)(kes )1( kes
)(keF

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University
電子式變速與容錯功能之系統設計電子式變速與容錯功能之系統設計--系統架構系統架構
Robot and Servo Drive Lab. 19
油門命令
estDuty
切換命令
馬達
48V
Drive board
Control board
5V
Battery
驅動器
Relay
Delta接結構
Wye接結構
限電流保護
電流感測器
霍爾元件
中央控制單元
硬體電流保護
驅動器異常偵測
速度計算
模糊控制定速器

Department of Electrical Engineering Southern Taiwan University
Department of Electrical Engineering Southern Taiwan University Robot and Servo Drive Lab. 20
Thanks for your attention!Thanks for your attention!