第四章 根轨迹法
20
第第第 第第第第 第第第 第第第第 4.1 第 第 第 第 第 4.2 第第第第第第第第第第 4.3 第 第 第 第 第 En d 第第第第
-
Upload
callum-holman -
Category
Documents
-
view
44 -
download
0
description
第四章 根轨迹法. 4.1 根 轨 迹 方 程. 4.2 根轨迹绘制的基本法则. 4.3 广 义 根 轨 迹. 本章作业. End. R ( s ). C ( s ). (-). j . s 1. K =1/2. j0.5. . . . 0. -1. -0.5. s 2. 表示系统的闭环极点. 4.1 根轨迹方程. 4.2. 4.3. 4.1.1 根轨迹 ( root locus ) 概念. 根轨迹 : 是指开环系统某个参数 由 0 变化到 ∞, 闭环特征根在 s 平面 - PowerPoint PPT Presentation
Transcript of 第四章 根轨迹法

第四章 根轨迹法第四章 根轨迹法 第四章 根轨迹法第四章 根轨迹法
4.1 根 轨 迹 方 程
4.2 根轨迹绘制的基本法则
4.3 广 义 根 轨 迹
End
本章作业

4.1 4.1 根轨迹方程根轨迹方程4.1 4.1 根轨迹方程根轨迹方程
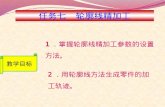
根轨迹:是指开环系统某个参数由 0 变化到∞,闭环特征根在 s 平面上移动的轨迹。根轨迹与系统性能密切相关。
Kss
K
Kss
Ks
2)1(
)(
2
41
2
1,
2
41
2
121
Ks
Ks
表示系统的闭环极点
0
j
j0.5K=1/2
-0.5-1
s1
s2
闭环特征方程为 s2+s+K=0, 解得闭环特征根表达式
令 K (由 0 到∞ )变动, s1 、 s2 在 s 平面的移动轨迹即为根轨迹。研究根轨迹的目的:分析系统的各种性能(稳定性、稳态性能、动态性能)
4.1.1 根轨迹 (root locus) 概念1)( ss
KR(s)
(-)
C(s)
4.2 4.3
动画演示

• 根轨迹增益: K* 为开环系统根轨迹增益;闭环系统根轨迹增益 等于开环系统前向通路根轨迹增益。 ( 由下式及 m<n 可知)
• 开环零点:指系统开环传递函数中分子多项式方程的根。• 开环极点:指系统开环传递函数中分母多项式方程的根。• 闭环零点:指系统闭环传递函数中分子多项式方程的根。闭环
零点由前向通道的零点和反馈通道的极点构成。对于单位反馈系统,闭环零点就是开环零点。
• 闭环极点:指系统闭环传递函数中分母多项式方程的根。闭环极点与开环零、极点以及根轨迹增益 K* 均有关。 (K*→0, 开闭环极点相同。 )
n
jj
m
ii
n
m
ps
zsK
pspspsa
zszszsbsHsG
1
1*
210
210
)(
)(
)())((
)())(()()(
m
ii
n
jj
n
jj
zsKps
pssG
sHsG
sGs
1
*
1
1
)()(
)()(
)()(1
)()(
4.1.2 开 / 闭环传递函数零极点表达式
• 根轨迹法的基本任务:• 由已知的开环零、极点分布 及根轨迹增益,通过图解的方法找出闭环极点。

1. 由闭环特征方程得根轨迹方程为 G(s)H(s)= –1 。
),2,1,0(1)(
)()12(
1
1
*
ke
ps
zsKk
n
ii
m
jj
,1||
||
1
1
*
n
ii
m
jj
ps
zsK)12()()(
11
kpszsn
ii
m
jj
4.1.3 根轨迹方程 (magnitude and phase equations)
再把矢量方程表示为模值方程与相角方程,其模值方程和相角方程分别为:
2. 将根轨迹方程写成零、极点表示的矢量方程为:

MATLAB 仿真 -Root
• 法则 4: 实轴上的根轨迹 :实轴上根轨迹区段的右侧,开环零、 极点数目之和应为奇数。
• 法则 2: 根轨迹对称于实轴 : 闭环极点若为实数,则位于 [s] 平面实轴;若为复数则共轭出现,所以根轨迹对称于实轴。
• 法则 3: 根轨迹的起点与终点 :根轨迹起始于开环极点,终止于开环零点;如果开环零点数 m 小于开环极点数 n ,则有( n-m )条根轨迹终止于无穷远处 (的零点 )。
mn
zpm
ii
n
ii
a
11• 法则 5:根轨迹的渐近线 :渐近线与实轴交点的坐标
而渐近线与实轴正方向的夹角 k 依次取 0,+1,–1,+2,–2,… 一直到获得 n-m 个倾角为止。其中, n
为开环极点数, m 为开环零点数。 (a 可由相角方程中 s 得到。 )
mn
ka
)12(
4.24.2 根轨迹绘制的基本法则根轨迹绘制的基本法则 4.24.2 根轨迹绘制的基本法则根轨迹绘制的基本法则
例 1a
4.3
证 1
4.1
例 1 例2
证 1
例 1b
• 法则 1: 根轨迹的分支数 :根轨迹在 [s] 平面上的分支数等于闭环 特征方程的阶数 n, 也就是分支数与闭环极点的数目相同。

• 法则 8: 根轨迹与虚轴的交点 ( 也可用劳斯判据 ):
• 法则 7: 分离点(会合点)坐标 d :o 几条根轨迹在 [s] 平面上相遇后又分开的点,称为分离点。o 分离点的坐标 d 可由方程
得到。
m
i i
n
i i zdpd 11
11
0)()(1 jHjG
0)]()(1Im[
0)]()(1Re[
jHjG
jHjG
)(111
常数apsn
ii
n
ii
)zz()pz()1k2( j
m
kj1j
ki
n
1ikzk
o 终止角:
紧转例 4
• 法则 9: 根之和:o 若 n-m>=2 ,则有
例 2 证 3
例 2
例 2
动画演示
• 法则 6: 根轨迹的起始角 (从极点 pk) 和终止角 (到零点 zk) :o 起始角: )()()12(
11i
n
ki
ikjk
m
jpk ppzpk
例3
证2

证明 1• 由根轨迹方程:
*/1)(
)(
1
1 Kps
zs
n
ii
m
jj
01
lim)(
)(
lim
1
1
mnsn
ii
m
jj
s sps
zs
)12()()(11
kpszsn
ii
m
jj
j
p01
p02
p03
p04 0 z01z 02
z 03
z 04
s0
z 05
其余 n-m 条终止于无穷远处 :
起点 :K*=0, 式 (#) ∞, 所以 s=pi (i=1,2,…n)
终点 :K* ∞, 式 (#) 0, 所以 s=zj (j=1,2,…m)

证明 2
• 由
n
kii
i
m
jjk pszskps
11
111 )12()(
n
kii
ik
m
jjkpskpk ppzpkps
k11
1 )12(1
)z(z)p(z)π1k2(θ j
m
kj1j
ki
n
1ikzk
)12()()(11
kpszsn
ii
m
jj
• 同理得
• 假设在一开环极点 pk 附近取一点 s1, 则

证明 3
• 系统闭环特征方程为 0)()(1
*
1
m
jj
n
ii zsKps
0)()(1
*
1
m
jj
n
ii zsKps 0)]()([
1
*
1
m
jj
n
ii zsKps
ds
d
m
jj
m
jj
n
ii
n
ii
zs
zsdsd
ps
psdsd
1
1
1
1
)(
])([
)(
])([
ds
zsd
ds
psdm
jj
n
ii
11
)(ln)(ln即
n
ii
n
ii psps
11
)ln()(ln又
m
jj
m
jj zszs
11
)ln()(ln
m
i i
n
i i zsps 11
11即
m
j
jn
i
i
ds
zsd
ds
psd
11
)ln()ln(代入得
• 根轨迹若有分离点,表明闭环特征方程有重根,重根条件为
• 两式相除得

例 1a
103
)2()1(011
mn
zpm
ii
n
ii
a
,3
,3
)12(
mn
ka
)2)(1()(
*
sss
KsG
例 1b 已知单位反馈系统的
动画演示
动画演示

)22()(
2
*
sss
KsG单位反馈系统的
例 2
p02
j
0-1
j1 j1.15
a
p03
p0160
603
2
45
2,4: * K临界稳定
3
2
03
)1()1(011
jj
mn
zpσ
m
ii
n
ii
a
mn
ka ,
3,
3
)12(
n
kii
ik
m
jjkpk ppzpk
11
)12(
0220)22(0)()(1 *23*23
KjjKssssHsGjs
即
4,202
02 *
3
*2
KK
44
3
20)12(2
kp
动画演示
)2( 此时另一闭环极点为

例 3
103
)2()1(011
mn
zpσ
m
ii
n
ii
a
π ,π
,π
mn
π2ka
33
1)(
02
1
1
11
ddd
)(58.1,42.0 21 舍去 dd
023
0)23(0)()(1
*23
*23
Kjj
KssssHsGjs
即
6K,2ω *
• 开环增益为 K=K * /2 , K 的稳定域为 0<K<3 .
)2)(1()(
*
sss
KsG• 例 : 某单位反馈系统
,
动画演示

例 4 (了解即可)
0
j
j2.45
j4
-4-2
10j
45
135
复数分离点
实数分离点)42)(42)(4(
)204)(4()()(
*
2
*
jsjsss
K
ssss
KsHsG
• 例 :
若开环零、极点个数均为偶数,且左右对称分布于一条平行于虚轴的直线,则根轨迹一定关于该直线左右对称。
MATLAB 仿真 -Root-6

2
* )1()(
s
sKsG
例 5
j
0
s1
s2
• 例 :
带开环零点的二阶系统,若能在复平面上画出根轨迹,则复平面根轨迹一定是圆或圆弧。
动画演示
MATLAB 仿真 -Root-7

•例 6: 已知系统 , 求 Ta 由0→∞ 的闭环根轨迹。
)15(
)1(5)()(
ss
sTsHsG a
•解 : 原系统的闭环特征方程为 D(s)=1+G(s)H(s)=s(5s+1)+5(Tas+1)=0 ,
所以 就是新的开环传函,而 5Ta 相当于新的开环增益。 55
52 ss
sTa
4.3 4.3 广义根轨迹广义根轨迹4.3 4.3 广义根轨迹广义根轨迹
• 变化的参数不是开环根轨迹增益 K* 的根轨迹叫参数根轨迹。• 将开环传函变形,让变化的参数处于开环增益的位置,就可以采用绘制常规根轨迹时的法则。
• 解题关键:要将开环传函变形,将非开环增益的参数变换到开环增益的地位。
将和参数有关的各项归并在一起,上式可写为 5s2+s+5+5Tas=0
4.1 4.2
4.3.1 参数根轨迹 (parameter root locus)
在负反馈系统中, K* 变化时的根轨迹叫做常规根轨迹。其他情况下的根轨迹称广义根轨迹。通常有参数根轨迹和零度根轨迹。

例 7 :求 Tm 从 0 → ∞ 时的根轨迹
1)( sTs
K
m
R(s)
(-)
C(s)
j
0
P1
P2
-K
原系统的闭环特征方程为 Tms2 + s + K = 0
整理可得等效开环传函
或由 s2 + s/Tm + K/Tm = 0
得新的特征方程为 s2 + (s+ K)/ Tm = 0
)1)()((
1
''2
sHsGs
KsTm 即
)(
则新的等效开环传函为
)1)()((01 ''2
sHsGKs
sTm 即)(
动画演示
MATLAB 仿真 -Root-8

• 如果系统的特征方程的形式为 1-G(s)H(s)=0,
),2,1,0k(e1
)ps(
)zs(Kk2
n
1ii
m
1jj
*
4.3.2 零度根轨迹 (0o root locus)
其根轨迹叫零度根轨迹。
此时因为其相角遵循条件:
零度根轨迹与 180 根轨迹的区别体现在:1. 实轴上的根轨迹;2. 渐近线与实轴的夹角;3. 出射角与终止角。

•附加开环零点的作用
( 参见 P132)
增加极点
增加零点
MATLAB 仿真 -Root-9
)22()()(
2
*
sss
KsHsG


本 章 作 业本 章 作 业本 章 作 业本 章 作 业
P147
• 4-1• 4-2(2)• 4-3(2)• 4-4• 4-5• 4-10(1)