Кинематика на равнинен механизъм
29
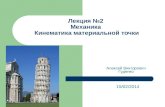
КИНЕМАТИКА НА РАВНИННОТО ДВИЖЕНИЕ НА ТЯЛО Зад.1 В разглеждания момент механизмът има положението, показано на фиг.1.1. Дадени са ъгловата скорост s -1 и ъгловото ускорение s -2 на прът . Да се определят: 1. Скоростите на точки , , , , и ъгловите скорости на всички тела; 2. Ускорението на т. и ъгловото ускорение на тяло ; 3. Въртящото, центростремителното, нормалното, тангенциалното и пълното ускорения на т. . Фиг. 1.1 Решение: 1. Определяне на броя на телата и вида на движение на всяко от тях Телата са четири на брой – прът (тяло 1), прът (тяло 2), прът (тяло 3) и прът (тяло 4). За определяне на вида на движението на всяко от тях, ще разгледаме по-ранен момент от движението на механизма (Фиг.1.2). 1
-
Upload
ivan-ivanov -
Category
Technology
-
view
4.121 -
download
4
description
...
Transcript of Кинематика на равнинен механизъм

КИНЕМАТИКА НА РАВНИННОТО ДВИЖЕНИЕ НА ТЯЛО
Зад.1
В разглеждания момент механизмът има положението, показано на фиг.1.1. Дадени са ъгловата скорост s-1 и ъгловото ускорение s-2 на прът .
Да се определят:
1. Скоростите на точки , , , , и ъгловите скорости на всички тела;2. Ускорението на т. и ъгловото ускорение на тяло ;3. Въртящото, центростремителното, нормалното, тангенциалното и пълното
ускорения на т. .
Фиг. 1.1
Решение:1. Определяне на броя на телата и вида на движение на всяко от тяхТелата са четири на брой – прът (тяло 1), прът (тяло 2), прът (тяло 3) и
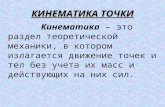
прът (тяло 4). За определяне на вида на движението на всяко от тях, ще разгледаме по-ранен момент от движението на механизма (Фиг.1.2).
Фиг. 1.2
1

Тяло 1 има неподвижна точка (т. ) във всеки един момент от движението, т.е. то извършва ротационно движение.
За тела 2 и 3 виждаме, че те нямат неподвижна точка и не остават успоредни сами на себе си в процеса на движение. В такъв случай приемаме, че тези тела извършват равнинно движение.
Всички точки на тяло 4 също се преместват в процеса на движение, но през цялото време прътът остава успореден сам на себе си. Това означава, че тяло 4 се движи транслационно.
2. Определяне на скоростите на точки , , , , и ъгловите скорости на отделните тела
Определянето на скоростите на отделните точки и тела започва от тяло, за което са дадени някои кинематични характеристики. В нашия случай това е тяло 1 – за него знаем ъгловата скорост. Освен това, при анализа в предишната точка установихме, че тялото извършва ротационно движение около т. . Тогава, за определяне на скоростта на т. имаме:
m/s,като направлението на е перпендикулярно на , а посоката й се определя от тази на (Фиг.1.3).
След това трябва да намерим ъгловата скорост на тяло 2, което извършва равнинно движение. Ще представим това движение като ротация на тялото около точка, чиято скорост е нула, наречена моментен център на скоростите (МЦС). За да определим положението на МЦС, трябва да разгледаме две точки от тяло , за които знаем направленията на скоростите. Първата точка е , понеже като част от тяло , тя е точка от ротационно движещо се тяло – направлението на скоростта й е перпендикулярно на . Втората разглеждана точка ще бъде – движението й е ограничено от опората, която позволява движение само в едно направление, съответно в същото направление ще бъде и скоростта на т. . След това спускаме перпендикуляри от направленията на скоростите на точки и и пресичайки ги намираме положението на т. – МЦС на тяло (Фиг.1.3).
Тогава:
,
където е скоростта на т. , а е разстоянието от т. до МЦС на тяло .За определянето на е разгледан правоъгълния триъгълник :
;
m;
m.
Окончателно, за ъгловата скорост на тяло 2 се получава:
s-1.
Посоката на се определя от посоката на .Скоростта на т. е:
,
2

където е разстоянието от т. до МЦС на тяло . Това разстояние определяме с помощта на питагоровата теорема:
m.За скоростта на т. се получава:
m/s,като нейната посока се определя от посоката на .
Скоростта на т. е:,
където е разстоянието от т. до МЦС на тяло :
m.Тогава:
m/s.Тяло 3 също извършва равнинно движение. В разглеждания момент обаче,
направленията на скоростите на двете негови точки и са успоредни, което означава, че МЦС на тяло 3 е в безкрайността (Фиг.1.3). В такъв случай:
m/s.Тяло 4 се движи транслационно, от което следва, че скоростите на всички негови
точки са равни. Тогава:m/s.
Фиг.1.3
проверка с теоремата за проектираните скорости
3

пр. = пр. ;
пр. = пр. ;
пр. = пр.;
пр. = пр. .
3. Определяне на ускорението на т. и ъгловото ускорение на тяло Ускорението на т. е ускорението на точка от тяло, което извършва равнинно
движение и то е:, (1)
където е ускорението на т. , избрана за полюс, а и са центростремителната и въртящата компоненти на ускорението на т. при въртенето й около полюса. Директрисата на е известна, защото в т. има опора, позволяваща движение само в едно направление.
Избраният полюс /т. / свързва двете тела, а като част от тяло , той е точка от тяло, което се движи ротационно. В такъв случай ускорението на т. има две компоненти – центростремителна и въртяща:
(2)и формула (1) добива окончателния вид:
. (3)
В това уравнение неизвестните са две – големините на и и за да ги определим трябва да съставим две проекционни уравнения. Преди това обаче, трябва да определим големините на останалите ускорения в (3).
Центростремителното ускорение на т. е насочено към т. (центъра на ротация) и се получава от израза:
m/s2.Въртящото ускорение на т. се дава с формулата:
m/s2,
като направлението му е перпендикулярно на , а посоката му съвпада с тази на .Центростремителното ускорение на т. при въртенето й около полюса е:
m/s2,като то е насочено от т. към т. .
Въртящото ускорение на т. при въртенето й около полюса се получава във функция на ъгловото ускорение на тяло 2:
,
а направлението му е перпендикулярно на .Сега остава само да се запишат две проекционни уравнения, но за целта трябва да се изберат произволни посоки на и на (съответно и на ). Освен това, добре е осите, по които се извършва проектирането така да бъдат избрани, че в получените скаларни уравнения да се съдържа само по едно от неизвестните. В нашия случай така са избрани осите и (Фиг.1.4).
4

Фиг.1.4
Проектирайки уравнение (3) по се получава:,
,
m/s2.Получената величина е положителна, т.е. избраната посока за е вярна.Записваме уравнение (3) по :
,
,
m/s2;
s-2.
За и се получават отрицателни числа, което означава, че избраната посока е грешна, затова я задраскваме и поставяме вярната.
4. Определяне на въртящото, центростремителното, нормалното, тангенциалното и пълното ускорения на т.
Точка принадлежи на тяло, извършващо равнинно движение и определяйки неговия моментен център на ускоренията (МЦУ), ускорението на т. е:
.МЦУ се бележи с и е точка, чието ускорение в разглеждания момент от
движението е равно на нула. За определяне на нейното местоположение са необходими и достатъчни ускорението на полюса и ъгловата скорост и ъгловото ускорение на тялото – и .
5

Фиг.1.5
При определяне на и в предишната точка от задачата бяха необходими само центростремителната и въртящата компоненти на ускорението . Тук обаче ни трябват големината на пълното ускорение на т. и неговата директриса:
m/s2;
.
От теорията е известно, че МЦУ лежи на права, минаваща през полюса т.А и сключваща ъгъл с директрисата на ускорението , като този ъгъл се нанася от в посока на ъгловото ускорение (Фиг.1.5). Ъгълът се определя по формулата:
.
След това върху вече определената права се разполага отсечка (Фиг.1.5), чиято дължина е:
m.
Свързваме т. с т. (Фиг.1.6). Центростремителното ускорение е по правата с посока от към и големина:
,
а въртящото е перпендикулярно на с посока, определена от тази на , и големина:
.За определяне на дължината на използваме косинусовата теорема:
,,
m.Замествайки, получаваме:
6

m/s2;
m/s2.За големината на пълното ускорение на т. имаме:
m/s2,а направлението и посоката му се получават по правилото на паралелограма (Фиг.1.6).
Фиг.1.6
Освен центростремителна и въртяща компонента, ускорението на т. има и нормална и тангенциална:
,като за определянето им ще използваме формули, познати от „Кинематика на точка”.
Тангенциалното ускорение е:
,
а нормалното: .Тангенциалното ускорение е насочено по тангентата, а нормалното – по
нормалата към траекторията на т. . Понеже и скоростта е насочена по тангентата към траекторията на точката, а освен това е и перпендикулярна на правата през т. и МЦС – т. , то МЦС на тяло 2 лежи на нормалата (Фиг.1.7).
7

Фиг.1.7
По-рано определихме скоростта и ускорението на т. : m/s; m/s2.
Техните проекции по осите и са: m/s; m/s;
m/s2; m/s2.Тогава:
m/s2;
m/s2.На фиг.1.8 са показани ускорението на т. и неговите компоненти –
центростремителното, въртящото, нормалното и тангенциалното ускорения.
8

Фиг.1.8
9

Зад. 2. В разглеждания момент, механизмът има положението, показано на фиг.2.1.
Дадени са скоростта и ускорението на т. – m/s, m/s2. Да се определят:1. Скоростите на точки , , , и ъгловите скорости на всички тела;2. Ускорението на т. и ъгловите ускорения на тела и ;3. Ускорението на т. .Заб.: Цилиндърът се търкаля без плъзгане.
Фиг.2.1
Решение:1. Определяне на броя на телата и вида на движение на всяко от тяхТелата са четири на брой – цилиндър с център т. (тяло 1), прът (тяло 2),
прът (тяло 3) и прът (тяло 4). За определяне на вида на движението на всяко от тях, ще разгледаме по-ранен момент от движението на целия механизъм (Фиг.2.2).
Фиг.2.2
Тяло 1 се търкаля, т.е. извършва равнинно движение.
10

Тела 2 и 3 нямат неподвижна точка и не остават успоредни сами на себе си в процеса на движение. В такъв случай приемаме, че те извършват равнинно движение.
Тяло 4 има неподвижна точка (т. ) във всеки един момент от движението, т.е. то извършва ротационно движение.
2. Определяне на скоростите на точки , и и ъгловите скорости на отделните тела
Определянето на скоростите на отделните точки и тела започва от тяло или точка, за които са дадени някои кинематични характеристики. В случая това е т. – нейната скорост е известна.
Започваме от тяло 1 – за него установихме, че извършва равнинно движение. То ще бъде представено като ротация около моментния център на скоростите (МЦС). Тук МЦС на тялото е точката на допиране между цилиндъра и повърхността, върху която цилиндърът се търкаля без плъзгане (тази повърхност е неподвижна и всяка точка от тялото, която съвпада с нея, също е неподвижна).
Ъгловата скорост на тяло 1 се дава с израза:
s-1,
където е разстоянието от т. до МЦС на тяло 1. Посоката на се определя от
тази на (Фиг.2.3).Точка е от тяло 1 и нейната скорост е:
m/s,като направлението й е перпендикулярно на , а посоката й се определя от .
Точка също принадлежи на тяло 1 и нейната скорост е:m/s,
като направлението й е перпендикулярно на , а посоката й се определя от .Преминаваме към определяне на ъгловата скорост на тяло 2 и понеже то също се
движи равнинно, търсим МЦС. За целта ще използваме две точки от тяло 2, за които знаем направленията на скоростите – в случая и . Точка е от тяло 1 и нейното движение е по хоризонтална права, т.е. направлението на нейната скорост ще бъде също хоризонтално. Движението на т. е ограничено от опората, която позволява движение само по направление под ъгъл 450 спрямо хоризонта; в същото направление ще бъде и скоростта на т. . Спускаме перпендикуляри към директрисите на скоростта на двете точки. Там, където те се пресекат, се намира т. , която е МЦС на тяло (Фиг. 2.3). Тогава:
,
където е разстоянието от т. до МЦС на тяло 2 . За определянето му разглеждаме правоъгълния равнобедрен триъгълник :
,
,
m.
Окончателно, за се получава:
11

s-1,
като посоката й се определя от тази на .Скоростта на т. се дава с формулата:
, където m, защото са катети в равнобедрения правоъгълен триъгълник
.Скоростта е:
m/s, като тя е перпендикулярна на , а посоката й съвпада с тази на .
Фиг.2.3
За определянето на ъгловата скорост на тяло 3 отново използваме скоростта на т.. Тяло 3 извършва равнинно движение и неговият МЦС се получава като от
направленията на скоростите на т. и т. се спуснат перпендикуляри (направлението на скоростта на т. е известно, тъй като т. е от тяло 4, което се движи ротационно). Точка , в която те се пресичат, е МЦС на тяло 3 (Фиг.2.3).
Ъгловата скорост на тяло 3 се определя с уравнението:
,
където е разстоянието от т. до МЦС на тяло 3. Разглеждайки правоъгълния триъгълник :
12

m.
За ъгловата скорост на тяло 3 се получава:
s-1,
като посоката й се определя от тази на .За скоростта на т. имаме:
,където е разстоянието от т. до МЦС на тяло 3, което се определя по теоремата на Питагор:
m.Тогава:
m/s,като направлението й е перпендикулярно на , а посоката се определя от тази на .
За определянето на ъгловата скорост на тяло 4, използваме:
,
в която разстоянието се определя с уравнението:
m.
Тогава за ъгловата скорост на тяло 4 се получава:
s-1,
като посоката й се определя от тази на . проверка с теоремата за проектираните скорости пр. = пр. ;пр. = пр.
;пр. = пр. ;
пр. =пр.
3. Определяне на ускорението на т. и ъгловите ускорения на тела иВ тази задача е точка едновременно от две тела (3 и 4), като направлението и
големината на нейното ускорение са неизвестни. Определянето им става от два израза за ускорението на точката:
т. от тяло 3, което се движи равнинно:, (1)
където е ускорението на т. , избрана за полюс, а и са центростремителната и въртящата компонента на ускорението на т. при въртенето й около полюса. В уравнение (1) неизвестните са три – големината и директрисата на и големината на
, т.е. намирането на ускорението на т. само от него е невъзможно. т. от тяло 4, което извършва ротационно движение:
, (2)
13

където и са центростремителното и въртящото ускорение на т. . В (2)
неизвестните също са три – големината и директрисата на и големината на , т.е. намирането на ускорението на т. само чрез това уравнение също е невъзможно.
Като приравним обаче десните страни на (1) и (2), получаваме:. (3)
В израз (3) неизвестните вече са две – големините на и , но проектирайки го върху две оси, имаме две уравнения с две неизвестни и задачата може да се реши.
Първото, което трябва да направим е да определим големините на ускоренията в уравнение (3). Центростремителните ускорения се получават по формулите:
m/s2,
m/s2,като посоката на първото е от т. към т. , а на второто – от т. към т. (Фиг.2.4).
Въртящите ускорения са перпендикулярни на центростремителните и са:,
,
където и са ъгловите ускорения на тела 3 и 4. Сега ще проектираме уравнение (3) по оси и , като предварително сме
избрали произволни посоки на неизвестните и , и и (Фиг.2.4).
Фиг.2.4
Проекция на уравнение (3) по ос :,
,
m/s2,
s-2.
Знаците на и на се получават положителни – избраната за тях посока е вярна (Фиг.2.4).
Проекция на уравнение (3) по ос :
14

,
,
m/s2,
s-2.
Знаците на и на са отрицателни – избраната посока не е вярна и я сменяме (Фиг.2.4).
За получаване на големината на ускорението на т. , ще използваме уравнение (2), тъй като то се състои от две компоненти – и , които са взаимноперпендикулярни. Тогава:
m/s2.
Посоката и направлението на се определят по правилото на паралелограма (Фиг.2.5).
Фиг.2.5
4. Определяне на ускорението на т.Точка е от тяло 1, което извършва равнинно движение. За определяне на
нейното ускорение ще използваме познатата формула, като за полюс ще вземем т. :
. (4)
От теорията е известно, че ускорението на т. (МЦС на тяло 1) е насочено към центъра на цилиндъра (т. ), а неговата големина е:
m/s2.
Големините на центростремителната и въртящата компоненти на ускорението на т. спрямо т. определяме по познатите формули:
m/s2;
.
15

Фиг.2.6
Ъгловото ускорение се дава от зависимостта:
s-2,
като посоката му е съобразена с ориентацията на .Тогава:
m/s2.
След като всички компоненти на уравнение (4) са известни, остава да го проектираме върху две взаимноперпендикулярни оси. Тук отново ще използваме осите
и (Фиг.2.6).Проекция на (4) по :
m/s2.
Проекция на (4) по :
m/s2.
Големината на е:
m/s2,а посоката и направлението му се определят по правилото на паралелограма (Фиг.2.7).
Фиг.2.7
Зад.3
16

В разглеждания момент механизмът има положението, показано на фиг.3.1. Дадени са ускорението m/s2, ъгълът , който то сключва с и посоката на . Да се определят:
1. Скоростите на точки , , , , и ъгловите скорости на всички тела;2. Ускорението на т. и ъгловото ускорение на тяло .
Фиг.3.1
Решение:1. Определяне на броя на телата и вида на движение на всяко от тяхТелата са три на брой – прът (тяло 1), прът (тяло 2) и прът (тяло 3).
За определяне на вида на движението на всяко от тях, ще разгледаме предишен момент от движението на механизма (Фиг.3.2).
Фиг.3.2
Ясно се вижда, че тяло 1 има неподвижна точка (т. ) във всеки един момент от движението, т.е. то извършва ротационно движение.
17

Разглеждайки движението на тела 2 и 3, можем да кажем, че всички техни точки се преместват, като самите тела не остават успоредни сами на себе си в процеса на движение. Поради това приемаме, че тези тела извършват равнинно движение.
2. Определяне на ъгловата скорост и ъгловото ускорение на тяло 1В тази задача решението започва с определянето на ъгловата скорост и ъгловото
ускорение на тяло 1, защото е зададено ускорението на точка , която е част от него.
Фиг.3.3
Тяло 1 извършва ротационно движение и в такъв случай ускорението на т. е:.
Центростремителното ускорение е насочено към центъра на ротация (Фиг.3.3):,
където е ъгловата скорост на тяло 1, а разстоянието се получава по теоремата на Питагор:
m.Въртящото ускорение е перпендикулярно на центростремителното (Фиг.3.3) и
формулата за определянето му е: ,
където е ъгловото ускорение на тяло 1.От друга страна, познавайки големината, посоката и направлението на
ускорението на т. и разглеждайки правоъгълния триъгълник , можем да определим проекциите на по нормалата и тангентата. Това става по следния начин:
.
След това от изваждаме и получаваме ъгъла, който сключва с нормалата – той е равен на . Тогава:
; .
Сега, приравнявайки десните страни на горните равенства, за и имаме:
18

, ,
, ,
, ,
s-1; s-2.
3. Определяне на скоростите на точки , , , , и ъгловите скорости на телата
Определянето на скоростите на отделните точки и тела започва от тяло 1 – вече определихме ъгловата му скорост. Тялото извършва ротационно движение около т. и за скоростта на т. е в сила:
,
като направлението на е перпендикулярно на , а посоката се определя от . Разстоянието определяме чрез Питагоровата теорема:
m.Тогава:
m/s.Точка също е част от тяло 1. Нейната скорост е:
m/s, като направлението й е перпендикулярно на , а посоката й съвпада с тази на .
Продължаваме с определяне на ъгловата скорост на тяло 2, което се движи равнинно. Ще представим това движение като ротация на тялото около моментния център на скоростите (МЦС), като за да определим положението му разглеждаме т. и т. . Точка е от тяло и направлението на скоростта й е перпендикулярно на . Движението на т. е ограничено от опорното устройство затова направлението на скоростта й ще бъде същото като на опората. След това спускаме перпендикуляри към направленията на скоростите на точки и и пресичайки ги намираме положението на т. – МЦС на тяло (Фиг.3.4).
Тогава:
,
където е разстоянието от т. до МЦС на тяло 2. За определяне на разглеждаме подобните правоъгълни триъгълници и
:
m.
За ъгловата скорост на тяло 2 получаваме:
s-1,
като нейната посока се определя от тази на .Скоростта на т. е:
,където е разстоянието от т. до МЦС на тяло . Това разстояние определяме с помощта на Питагоровата теорема:
m.
Скоростта е:
19

m/s,като нейната посока съвпада с тази на .
Фиг.3.4 Точка също е от тяло 2 и нейната скорост се получава по формулата:
,където разстоянието се определя с теоремата на Питагор:
m.
Окончателно: m/s,
а посоката й се определя от тази на .Преминаваме към определяне на ъгловата скорост на тяло 3, което също
извършва равнинно движение. Определянето на положението на неговия МЦС става като към направленията на скоростите на точки и спуснем перпендикуляри. Точка
е от тяло 2 и извършва ротация около неговия моментен център на скоростите. Тогава директрисата на скоростта на т. е перпендикулярна на . Движението на т.
е ограничено от опората, която позволява движение по хоризонтална права, съответно в същото направление ще бъде скоростта на т. . Тогава, спускайки перпендикуляри към директрисите на скоростите на точки и и пресичайки ги, намираме положението на т. – МЦС на тяло 3 (Фиг.3.4).
В такъв случай, ъгловата скорост на тяло 3 е:
,
където е разстоянието от т. до МЦС на тяло 3 . За определянето му разглеждаме подобните правоъгълни триъгълници и :
20

m.
Тогава:
s-1,
като нейната посока съвпада с тази на . Скоростта на т. е:
,където разстоянието се определя с теоремата на Питагор:
m.
За скоростта получаваме:m/s,
като посоката й се определя от тази на .Посоките на скоростите на отделните точки и на ъгловите скорости на трите
тела са дадени на фиг.3.5.
Фиг.3.5
проверка с теоремата за проектираните скорости пр. = пр.
;пр. = пр. ;
пр. =пр.
21

пр. = пр. ;
пр. = пр. .
3. Определяне на ускорението на т. и ъгловото ускорение на тяло Ускорението на т. е ускорението на точка от тяло, което извършва равнинно
движение и е:, (1)
където е ускорението на т. , избрана за полюс, а и са центростремителната и въртящата компоненти на ускорението на т. при въртенето й около полюса (Фиг.3.6). Директрисата на е известна, защото в т. има опора, позволяваща движение само в хоризонтално направление.
Избраният полюс /т. / свързва двете тела, а като част от тяло , той е точка от тяло, което се движи ротационно. Тогава за определяне на неговото ускорение се опираме на израза:
(2)и формула (1) добива окончателния вид:
. (3)
В това уравнение неизвестните са две – големините на и . За определянето на тези неизвестни, трябва (3) да се проектира върху две оси.
Центростремителното ускорение на т. е насочено към т. (центъра на ротация) и се получава по формулата:
m/s2.Въртящото ускорение на т. се дава с израза:
m/s2,
като направлението му е перпендикулярно на , а посоката му се определя от .Центростремителното ускорение на т. при въртенето й около полюса се
получава от зависимостта:m/s2,
като то е насочено от т. към т. (Фиг.3.6).Въртящото ускорение на т. при въртенето й около полюса се получава във
функция на ъгловото ускорение на тяло 2:,
а направлението му е перпендикулярно на (Фиг.3.6). Сега остава само да се запишат две проекционни уравнения, но за целта трябва да се изберат произволни посоки на и на (съответно и на ). Освен това, добре е осите, по които се извършва проектирането да бъдат така избрани, че в получените скаларни уравнения да се съдържа само по едно от неизвестните. В нашия случай така са избрани осите и (Фиг.3.6).
22

Фиг.3.6
Проекция на (3) по :,
,
m/s2.За ускорението на т. се получава положително число, което означава, че
избраната предварително посока е вярна.Проекция на (3) по :
,
,
m/s2;
s-2.
За и също се получиха положителни числа, което означава, че избраната за тях посока е вярна.
23