






Languages
Pages
Legal

Gymnasium und Realgymnasium Mürzzuschlag 8680 Mürzzuschlag, Roseggergasse 10
Vorwissenschaftliche Arbeit
Titel der vorwissenschaftlichen Arbeit:
Conformal Mapping Eine Einführung in die konforme Abbildung im
Allgemeinen und im Speziellen in der Aerodynamik
Verfasser:
Thomas Albert Maierhofer
Mürzzuschlag, im Februar 2015
Prüfungsgebiet: Mathematik
Klasse: 8B
Schuljahr: 2014/15
Betreuerin: Prof. Mag. Birgit Leistentritt
Abstract
Das Ziel dieser Vorwissenschaftlichen Arbeit ist es, eine Einfuhrung in das Thema Confor-
mal Mapping (konforme Abbildungen), ein Teilgebiet der komplexen Analysis, zu geben
und eine praktische Verwendung desselben, anhand einer Anwendung in der Aerodynamik,
zu veranschaulichen.
Die Arbeit baut auf der Behandlung der theoretischen Grundlagen und Eigenschaften der
komplexen Zahlen auf und erklart die komplexen Funktionen, welche den Grundstein fur
die konformen Abbildungen darstellen. In weiterer Folge wird auf deren wichtigste Ei-
genschaften detailliert eingegangen und es werden verschiedene Klassen von konformen
Abbildungen erlautert.
Abschließend wird eine praktische Anwendung in der Aerodynamik, im Speziellen die Be-
deutung dieser fur die Modellierung von Tragflachenprofilen, gezeigt. Hierbei wird sowohl
theoretisch als auch graphisch veranschaulicht, wie sich durch Anderung einzelner Para-
meter, die zahlreichen Formen der Abbildung ergeben.
Abstract
The aim of this thesis is to introduce the topic Conformal Mapping which is part of Com-
plex Analysis, and to demonstrate a practical application in Aerodynamics of the same.
The paper commences with introducing the theoretical principles and properties of com-
plex numbers and explains complex functions, which form the basis for conformal map-
pings. Additionally their most important properties will be covered in detail and various
classes of conformal mappings will be shown.
Finally a practical application in aerodynamics is illustrated, with focus on its importance
for the modelling of aerofoils. In the course of this it is demonstrated theoretically as well
as graphically how changes in distinct parameters result in various shapes of the image.
2
Vorwort
Mit dem Thema der komplexen Analysis wurde ich erstmals im Rahmen der Austrian
Summer School 2013, in Saalbach, konfrontiert. Wahrend eines Workshops erhielten wir
von Univ.-Prof. Dr. F. Haslinger, Universitat Wien, eine Einfuhrung in dieses Themenge-
biet der Mathematik.
Bei einem Gesprach mit meinem Bruder uber diesen Workshop stellte sich heraus, dass er,
von seiner Teilnahme an der Austrian Summer School 2011, ein Skriptum uber Conformal
Mapping, das auf komplexer Analysis aufbaut, besitzt. Nachdem ich mich damit befasst
hatte und vor allem von der beschriebenen Anwendung in der Aerodynamik fasziniert
war, wusste ich, dass ich das Thema meiner vorwissenschaftlichen Arbeit in Mathematik
gefunden hatte.
Daraufhin begann ich mich in dieses Thema einzulesen und je mehr ich mich darin ver-
tiefte, umso mehr fuhlte ich mich in meiner Wahl bestatigt.
3

Inhaltsverzeichnis
Abstract 2
Vorwort 3
1 Einleitung 6
2 Komplexe Zahlen 7
2.1 Geschichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Die graphische Darstellung komplexer Zahlen . . . . . . . . . . . . . . . . 8
2.4 Elementare Rechenoperationen . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.1 Addition und Subtraktion . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.2 Multiplikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.3 Division . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.4 Konjungiert komplexe Zahl . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Der Fundamentalsatz der Algebra . . . . . . . . . . . . . . . . . . . . . . . 10
3 Komplexe Funktionen 12
3.1 Definition und Begriffserklarung . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Differenzieren im Komplexen . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2.1 Begriffserklarung und Definition . . . . . . . . . . . . . . . . . . . . 13
3.2.2 Regeln fur das Differenzieren in C . . . . . . . . . . . . . . . . . . . 15
3.2.3 Analytische Funktionen . . . . . . . . . . . . . . . . . . . . . . . . 15
3.3 Cauchy-Riemann Differentialgleichungen . . . . . . . . . . . . . . . . . . . 16
4 Konforme Abbildungen 17
4.1 Definition und Begriffserklarung . . . . . . . . . . . . . . . . . . . . . . . . 17
4
4.2 Konformer Abbildungssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 Die Riemannsche Zahlenkugel und stereographische Projektionen . . . . . 20
4.3.1 Koordinatenbeziehungen . . . . . . . . . . . . . . . . . . . . . . . . 21
4.3.2 Kreisverwandtschaft . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.3.3 Winkeltreue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.4 Gebrochen lineare Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4.1 Ganze lineare Funktionen . . . . . . . . . . . . . . . . . . . . . . . 25
4.4.2 Inversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.5 Mobiustransformationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.5.1 Eigenschaften von Mobiustransformationen . . . . . . . . . . . . . . 31
4.5.2 Mobiustransformationen auf der Riemannschen Zahlenkugel . . . . 33
4.6 Abbildung von Kreisen und Geraden . . . . . . . . . . . . . . . . . . . . . 34
5 Anwendung in der Aerodynamik - Tragflachenprofile 37
5.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2 Die Funktion w = z2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2.1 Abbildung von Geraden . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2.2 Abbildung von Kreisen . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3 Joukowski Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.3.1 Zusammensetzung der Joukowski Funktion . . . . . . . . . . . . . . 40
5.3.2 Graphische Darstellung der Joukowski Funktion und Auswirkungen
von Anderungen der Parameter x, y . . . . . . . . . . . . . . . . . . 41
6 Zusammenfassung 46
Literaturverzeichnis 47
Abbildungsverzeichnis 49
Selbststandigkeitserklarung 51
5

1 Einleitung
Conformal Mapping (konforme Abbildungen) ist ein Teilbereich der komplexen
Analysis. Es gibt in zahlreichen Gebieten der Mathematik und Physik eine Vielzahl an
Anwendungsmoglichkeiten, die sich aufgrund ihrer speziellen Eigenschaften ergeben. Ein
Beispiel dafur ware die haufig benutzte Verwendung der konformen Abbildungen in der
Luftfahrttechnik, im Speziellen der Aerodynamik zur Entwicklung von Tragflachen.
Diese Arbeit setzt sich zum Ziel, das Thema konforme Abbildungen von Grund auf zu
erklaren und einen Einblick in eine Anwendung in der Aerodynamik zu gewahren. Am
Beginn wird zunachst eine Einfuhrung in die komplexen Zahlen gegeben, anschließend
werden die komplexen Funktionen behandelt, die eine Grundlage fur die konformen Ab-
bildungen bilden. Im Kapitel Konforme Abbildungen werden vor allem eine Einfuhrung in
das Verfahren und einige ihrer Eigenschaften behandelt. Abschließend gibt es einen kurzen
Einblick in eine Anwendung in der Aerodynamik, bei der auf eine Art der Berechnung von
Tragflachenprofilen eingegangen wird.
Grundsatzlich basiert diese vorwissenschaftliche Arbeit auf dem Selbststudium der The-
matik unter Verwendung diverser Fachliteratur (siehe Literaturverzeichnis). Sie wird durch
Beispiele und einer Programmierung in MATLAB, zur graphischen Darstellung von ver-
schiedenen Abbildungen bis zum Tragflachenprofil, erganzt. Zur Erarbeitung der Grund-
lagen zeigten sich die Bucher”Complex Variables - Introduction and Applications“ von
Mark J. Ablowitz und Athanassios S. Fokas1 und”Komplexe Zahlen und ebene Geometrie“
von Joachim Engel2 als sehr hilfreich.
1 Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applications. 2. Auf-lage. Cambridge: Cambridge University Press, 2003,
2 Engel, Joachim: Komplexe Zahlen und ebene Geometrie. 2., verbesserte Auflage. Munchen: OldenbourgVerlag, 2011,
6
2 Komplexe Zahlen
2.1 Geschichte
Als einer der wichtigsten Mathematiker bei der Entdeckung der komplexen Zahlen gilt
Hieronimo Cardano (1501-1576). Er beschrieb in seinem 1545 erschienenen Buch”Ars
magna“ die unmoglichen Losungen der Gleichung x(10 − x) = 40 mit x1,2 := 5 ±√−15.
Dieser Ausdruck, der Form a +√−b bzw. a + i
√b 1, welcher die sogenannte
”numeri
imaginarii“ (eingebildete Zahl)2 i :=√−1 beinhaltet, ist seither der Mathematik erhalten
geblieben.
Leonhard Euler (1707-1783) fuhrte das Symbol i ein. Er konnte mit dieser”neuen“ Zahl
und seiner 1748 entwickelten”Eulerschen Formel“
eiϕ = cosϕ+ i sinϕ
eine wichtige Verbindung zu grundlegenden Funktionen herstellen und erreichte somit,
dass die komplexen Zahlen immer mehr Anerkennung fanden.3
Durch Carl Friedrich Gauß (1777-1855) wurden die komplexen Zahlen endgultig als”echte“
Zahlen anerkannt. Mithilfe der geometrischen Darstellung in der Gaußschen Zahlenebene
(siehe Kapitel 2.3) konnte er die komplexen Zahlen”anschaulich“ machen.4
1vgl. Heuser, Harro: Lehrbuch der Analysis Teil 1. 10., durchgesehene Auflage. Wiesbaden: SpringerFachmedien, 1993, S. 41
2vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 63vgl. Forst, Wilhelm; Hoffmann, Dieter: Funktionentheorie erkunden mit Maple. 2., uberarbeitete und
aktualisierte Auflage. Berlin: Springer Spektrum, 2012, S. 24vgl. Roth, Jurgen: Die Zahl i - fantastisch, praktisch, anschaulich. Sekundarstufe I, 10. Schuljahr.
In: mathematik lehren. 2003, Nr. 121, S. 47-49, S. 48
7
2.2 Definition
Definition 2.2.1. Die Menge der Komplexen Zahlen C ist definiert durch:
C := {x+ iy : x, y ∈ R},
wobei x der Realteil <(z) und y der Imaginarteil =(z) einer komplexen Zahl z ist und
i2 = −1 (i ∈ C).
(Definitions-Quelle: 5)
Um zeigen zu konnen, dass in C dieselben Rechenregeln gelten wie in R benotigen wir
in C := R2 lediglich zwei Operationen:
(x1, y1) + (x2, y2) := (x1 + x2, y1 + y2)
(x1, y1) (x2, y2) := (x1x2 − y1y2, x1x2 + y1y2) .
Daraus folgt, dass (C,+, ·) ein kommutativer Korper ist und es gelten somit ∀ z ∈ C
dieselben Gesetze wie fur die reellen Zahlen, sofern diese rein uber die Korperaxiome
erreicht werden konnen.6 Außerdem gilt, dass zwei komplexe Zahlen z1 und z2 genau dann
gleich sind, wenn ihre Realteile und Imaginarteile gleich sind:
z1 = z2 ⇔ x1 + iy1 = x2 + iy2 ⇔ (x1 − x2) = i (y2 − y1)
⇔ (x1 − x2)2 = (−1) (y2 − y1)2 ⇔ x1 = x2 , y1 = y2.
2.3 Die graphische Darstellung komplexer Zahlen
Eine Besonderheit tritt bereits bei der Darstellung einer komplexen Zahl auf. Jede reelle
Zahl kann als Punkt auf einer Zahlengerade dargestellt werden. Damit man aber komplexe
Zahlen geometrisch darstellen kann, benotigt man ein zweidimensionales Koordinatensys-
tem, einen”komplexen Raum“ (Gaußsche Zahlenebene). Jede komplexe Zahl z = x + iy
kann als zweidimensionaler Vektor(xy
)seiner Realteile und Imaginarteile verstanden wer-
den (vgl. Abbildung 2.1). Wie man in Kapitel 2.4 sehen kann, ist es sinnvoll, komplexe
5vgl. Forst, Wilhelm; Hoffmann, Dieter: Funktionentheorie erkunden mit Maple, S. 46vgl. ebda, S. 4
8

Zahlen in Polarkoordinaten (r, ϕ): x = r cosϕ, y = r sinϕ, (r ≥ 0) darzustellen.
Somit kann man komplexe Zahlen z in der Polarform schreiben:7
z = x+ iy = r(cosϕ+ i sinϕ)
⇔ z = re(iϕ) = r(cosϕ+ i sinϕ).
<{z}
={z}
x=r
sinϕ
y = r cosϕ z = x+ iy = reiϕz = x+ iy = reiϕz = x+ iy = reiϕ
r
ϕ
Abb. 2.1: Darstellung einer komplexen Zahl in der Gaußschen Zahlenebene
2.4 Elementare Rechenoperationen
2.4.1 Addition und Subtraktion
Nimmt man zwei komplexe Zahlen z1 = x1 + iy1 und z2 = x2 + iy2, dann ist:8
z1 + z2 = x1 + x2 + i (y1 + y2) .
Die Subtraktion von zwei Zahlen ∈ C funktioniert nach denselben Prinzipien wie die
Addition, indem man jeweils die < und die = der Zahlen subtrahiert.
2.4.2 Multiplikation
Fur das Produkt zweier komplexer Zahlen z1 und z2 gilt:
z1z2 = x1x2 − y1y2 + i (x1y2 + x2y1) .
7vgl. Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applications,S. 3f.
8vgl. Johnson, R.S.: An introduction to the theory of complex variables. 2012.Als Download: http://bookboon.com/de/an-introduction-to-the-theory-of-complex-variables-ebook(Zugriff: 24.08.2014)
9

Die Multiplikation von z1 und z2 kann jedoch viel einfacher in Polarform dargestellt werden.
z1z2 = r1eiϕ1r2e
iϕ2 = r1r2ei(ϕ1+ϕ2)
2.4.3 Division
z1
z2
=x1 + iy1
x2 + iy2
=(x1 + iy1) (x2 − iy2)
(x2 + iy2) (x2 − iy2)=
(x1 + iy1) (x2 + iy2)
x22 + y2
2
=
=x1x2 + y1y2
x22 + y2
2
+ i
(x2y1 − x1y2
x22 + y2
2
)
Bei der Division kann man genauso wie bei der Multiplikation erkennen, dass es einfacher
ist in Polarform zu rechnen.
z1
z2
=r1e
iϕ1
r2eiϕ2=r1
r2
· ei(ϕ1−ϕ2)
2.4.4 Konjungiert komplexe Zahl
Zu einer komplexen Zahl x + iy existiert eine konjugiert komplexe Zahl, welche durch
z := x− iy definiert ist und deren Produkt zz ∈ R+ betragt.9
zz = x2 + y2
zz = (reiϕ)(re−iϕ) = r2
2.5 Der Fundamentalsatz der Algebra
Von jedem Polynom, bis einschließlich 4. Grades, lassen sich dessen Nullstellen mit den
jeweiligen Losungsformeln bestimmen. So kann man die Nullstellen von quadratischen
Gleichungen mit den quadratischen Losungsformeln berechnen und fur Polynome 3. und
4. Grades ist es moglich, diese durch Verwendung der Losungsformeln von Cardano zu
erhalten.
So erhalt man fur die Gleichung der Form x3 + px+ q = 0, unter Anwendung der Formel
9vgl. Heuser, Harro: Lehrbuch der Analysis Teil 1, S. 43
10
von Cardano, die Losung:10
x =3
√−q
2+
√(q2
)2
+(p
3
)3
+3
√−q
2−√(q
2
)2
+(p
3
)3
.
Das eigentliche Problem ergibt sich jedoch ab Polynomen 5. Grades. Ein wesentlicher Fak-
tor, von der die Losbarkeit abhangt, ist die Grundmenge. Nimmt man z.B. die Gleichung
z2 + 1 = 0, so hat diese in R keine Losung, jedoch in der Grundmenge C besitzt sie die
Losungen L = {±i}.
Die erste Version des Fundamentalsatzes stammt von Carl Friedrich Gauß. Sie besagt, dass
jede Gleichung vom Grad n (n ≥ 1) in der Form:
f(z) = anzn + an−1z
n−1 + ...+ a1z + a0 = 0 ∀ai ∈ C
in C mindestens eine Losung besitzen muss. Daraus kann man nun schließen, dass wenn
z0 Losung der Funktion f(z) ist, diese in ein Produkt aufgespalten werden kann:
f(z) = (z − z0) · f1(z),
in dem f1(z) ein Polynom des Grades n−1 ist. Dies wiederum besagt, dass man in C jedes
Polynom vom Grad n komplett in Linearfaktoren zerlegen kann:
f(z) = an(z − z0) · (z − z1) · (z − z2) · ... · (z − zn−1).
Die zweite Fassung des Fundamentalsatzes sagt aus, dass jede Gleichung mit derselben
Form wie zuvor exakt n Nullstellen in C besitzt. Zusatzlich zu den vorherigen Bedingun-
gen muss jedoch gelten, dass an 6= 0 ist. Somit kann man in C jedes Polynom in genau n
Linearfaktoren aufspalten, woraus folgt, dass der Korper (C,+, ·) algebraisch abgeschlos-
sen ist.
Da man nun jede Gleichung in C losen kann, benotigt man keine weiteren Zahlenerweite-
rungen, um eine Gleichung losen zu konnen.11
10vgl. Roth, Jurgen: Die Zahl i - fantastisch, praktisch, anschaulich. Sekundarstufe I, 10. Schuljahr, S. 4711vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 89f.
11

3 Komplexe Funktionen
3.1 Definition und Begriffserklarung
Definition 3.1.1. Unter einer komplexen Funktion f einer komplexen Variablen z versteht
man eine Abbildung, welche jedem Element z ∈ D, D ⊆ C genau ein Element w ∈ T ,
T ⊆ C zuordnet.
f : D → T, f : z 7→ w = f(z)
D wird als Definitionsmenge von f(z), T als Zielmenge der Funktion f(z) und W als
Wertemenge von f(z) bezeichnet, fur die gilt:
W = {w ∈ T | ∃ z ∈ D : w = f(z)}.
(Definitions-Quelle: 1)
Jede komplexe Funktion ordnet einem reellen Zahlenpaar (x, y), wobei z = x+ iy ∈ D,
genau ein eindeutiges Zahlenpaar (u, v) zu, sodass w = u+ iv ∈ T erfullt ist. Fur u und v
gilt, dass sie reelle Funktionen von x und y sind.
Dadurch kann man jede komplexe Funktion in ihren Realteil <(z) und ihren Imaginarteil
=(z) aufspalten:2
w = f(z) = f(x+ iy) = u(x, y) + iv(x, y).
1vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 1112vgl. Greuel, Otto; Kadner, Horst: Komplexe Funktionen und konforme Abbildungen. 3. Auflage. Leipzig:
Springer Fachmedien, 1990, S. 24
12

Beispiel 3.1.1. Gegeben sei die Funktion w = f(z) =1
z.
Da w = u+ iv und z = x+ iy ist, kann diese folgendermaßen zerlegt werden:
w =1
x+ iy=
1
x+ iy· x− iyx− iy
=x
x2 + y2− i y
x2 + y2
⇒ <(w) : u(x, y) =x
x2 + y2und =(w) : v(x, y) =
y
x2 + y2.
Um eine komplexe Funktion geometrisch darstellen zu konnen, benotigt man fur die
Definitionsmenge D eine z-Ebene und fur die Zielmenge T eine w-Ebene.3
x
iy
u
iv
z-Ebene w-Ebene
z
D
w
T
Abb. 3.1: Geometrische Darstellung der Funktion w = f(z)
3.2 Differenzieren im Komplexen
3.2.1 Begriffserklarung und Definition
Definition 3.2.1. Die Differenzierbarkeit einer Funktion w = f(z) in einem Punkt z0 ist
durch die Existenz des Grenzwertes vom Differenzenquotienten definiert:
f ′(z0) = lim∆z→0
f(z0 + ∆z)− f(z0)
∆z= lim
∆z→0
∆w
∆z.
Damit dies erfullt ist, muss gelten, dass w0 = f(z0) und somit w0 + ∆w = f(z0 + ∆z) ist.
(Definitions-Quelle: 4)
Die Definition ist nur dann gultig, wenn sich z0 innerhalb des Bereiches, fur den die
Funktion definiert ist, befindet. Ist z0 jedoch ein Randpunkt dieses Bereiches, so benotigt
3vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 1124vgl. ebda, S. 113
13

man ∀ ausreichend kleinen ε > 0 ∃ δ > 0 sodass gilt:
|f(z)− w0| < ε immer dann, wenn 0 < |z − z0| < δ.
Graphisch wird in der Abbildung von w = f(z) zu jedem Punkt innerhalb des Kreises
δ = |z − z0| ohne z0 ein Punkt innerhalb des Kreises ε = |w − w0| abgebildet. Nur wenn
unabhangig von der Richtung der Annaherung z → z0 geht, kann ein Grenzwert existieren
und daraus folgt, dass w → w0 geht.5
z-Ebene w-Ebene
z0
w0
zδ
w
ε
w = f(z)
Abb. 3.2: Punkte mit |z − z0| < δ abgebildet auf |w − w0| < ε
Die Differentialrechnung im Komplexen kann nach denselben Regeln, wie sie auch fur
die Durchfuhrungen der Differentiation im Reellen gelten, ausgefuhrt werden. Allerdings
muss zusatzlich beachtet werden, dass die zu differenzierende Funktion zumindest in einem
gewissen Umfeld um einen Punkt z0 kontinuierlich ist.6
5vgl. Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applications,S. 20f.
6vgl. Johnson, R.S.: An introduction to the theory of complex variables S. 29
14

3.2.2 Regeln fur das Differenzieren in CCC
Fur das Differenzieren von Funktionen in C gelten dieselben Grundregeln wie fur Funk-
tionen in R.
1. f(z) = zn ⇒ f ′(z) = nz(n−1)
2. f(z) =√z ⇒ f ′(z) =
1
2√z
3. f(z) =1
z⇒ f ′(z) = − 1
z2
4. f(z) = g(z) · h(z)⇒ f ′(z) = g′(z) · h(z) + g(z) · h′(z)
5. f(z) = g(h(z))⇒ f ′(z) = g′(h(z)) · h′(z)
Beweisen lasst sich jede einzelne Regel analog fur C zu den Beweisen dieser fur R.7
3.2.3 Analytische Funktionen
Definition 3.2.2. Eine Funktion f(z) ist genau dann an der Stelle z0 differenzierbar,
wenn fur eine Funktion f : C ⊃ W → C,W der Grenzwert
f ′(z0) := limz→z0
f(z)− f(z0)
z − z0
= lim∆z→0
f(z0 + ∆z)− f(z0)
∆z
existiert. Die Funktion f(z) ist analytisch an der Stelle z0, falls ∃ ε > 0 sodass f(z) komplex
differenzierbar fur jedes z mit |z− z0| < ε ist. Kann man f uberall in W differenzieren, so
heißt f analytisch auf W . Wenn W = C ist, so bezeichnet man f als eine ganze Funktion.
(Definitions-Quelle: 8)
7vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 114f.8vgl. Bobenko, Alexander I.: Komplexe Analysis. Berlin: 21. November 2006. Als Download:
http://page.math.tu-berlin.de/∼bobenko/Lehre/Skripte/FT.pdf (Zugriff: 12.12.2014) S. 4
15

3.3 Cauchy-Riemann Differentialgleichungen
Verwendet man nun die Regeln der Differentialrechnung und schreibt eine Funktion
w = f(z) mithilfe ihrer Transformationsgleichungen u(x, y) und v(x, y) an, so erhalt man:
w = f(z) = u(x, y) + iv(x, y)
f ′(z) = lim∆z→0
f(z + ∆z)− f(z)
∆z
= lim∆z→0
(u(x+ ∆x, y + ∆y)− u(x, y)
∆x+ i∆y+ i
v(x+ ∆x, y + ∆y)− v(x, y)
∆x+ i∆y
).
Der Grenzwert dieser Funktion muss immer existieren und denselben Wert haben, un-
abhangig davon, wie man sich an z annahert. Man kann nun zwischen zwei Fallen unter-
scheiden, einmal nahert man sich der reellen Achse an und das zweite Mal der imaginaren.
Fall 1:
f ′(z) = lim∆x→0
(u(x+ ∆x, y)− u(x, y)
∆x+ i
v(x+ ∆x, y)− v(x, y)
∆x
)=∂u(x, y)
∂x+ i
∂v(x, y)
∂x
Fall 2:
f ′(z) = lim∆y→0
(u(x, y + ∆y)− u(x, y)
i∆y+ i
v(x, y + ∆y)− v(x, y)
i∆y
)= −i∂u(x, y)
∂y+∂v(x, y)
∂y
Aufgrund der Voraussetzung, dass alle Grenzwerte den gleichen Wert haben mussen folgt:
∂u(x, y)
∂x=∂v(x, y)
∂y
−∂u(x, y)
∂y=∂v(x, y)
∂x.
Diese zwei Gleichungen besitzen die Bezeichnung Cauchy-Riemann Differentialgleichun-
gen. Ist eine komplexe Funktion f(z) = u(x, y) + iv(x, y) differenzierbar, dann erfullt sie
die Cauchy-Riemannschen Differentialgleichungen.9
9vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 115f.
16
4 Konforme Abbildungen
4.1 Definition und Begriffserklarung
Definition 4.1.1. Eine komplexe Abbildung einer Funktion f : D 7→ C heißt genau dann
konform, wenn sie winkeltreu, analytisch auf D, orientierungstreu und injektiv ist.
1. f ist analytisch
2. f ist injektiv
3. ∀z ∈ D : f ′(z) 6= 0
(Definitions-Quelle: 1)
Einer konformen Abbildung liegt allgemein zu Grunde, dass eine Kurve aus der
z-Ebene in die w-Ebene abgebildet wird. Zunachst betrachte man eine Kurve k fur die
gilt, dass z = z(t), t ∈ R. Der Differenzenquotient zweier benachbarter Punkte z0 und
z1 = z0 + ∆z = z(t0 + ∆t) lasst sich berechnen mit:
∆z
∆t=z(t0 + ∆t)− z(t0)
∆t.
Die Richtung der Sekante ergibt sich nun durch den Winkel bzw. das arg∆z
∆t. Um sich
nun den Winkel einer Tangente ausrechnen zu konnen bildet man, wie im Reellen, den
Grenzwert, wobei ∆t→ 0 geht. Mit argdz
dtist es moglich die Richtung der Tangente in z0
anzugeben.
Der Schnittwinkel zwischen den Tangenten zweier Kurven k1 und k2 im Punkt z0 in der
z-Ebene kann berechnet werden, indem man die beiden Steigungswinkel beider Tangenten
voneinander subtrahiert, also γ2− γ1. Bildet man nun diese Kurven in die w-Ebene ab, so
1vgl. Lowen, R.; Schroth, A.E.; Wirths, K.-J.: Funktionentheorie. Als Download:http://www.iaa.tu-bs.de/et/ft.pdf (Zugriff: 12.11.2014) S. 20
17

schneiden sie sich im Punkt w0 = f(z0). Nach den Cauchy-Riemann Differentialgleichun-
gen wissen wir, dass jede Abbildung einer Kurve von der z-Ebene in die w-Ebene einer
Drehstreckung entspricht. Deshalb darf behauptet werden, dass sich die Tangente an w0
gegenuber jener Tangente an z0 nur um den Winkel arg(f ′(z0)) dreht:2
(γ2 + arg(f ′(z0)))− (γ1 + arg(f ′(z0))) = γ2 − γ1.
Daraus folgt, dass der Schnittwinkel erhalten bleibt und somit ist eine differenzierbare
Funktion winkeltreu.
Um die Streckung einer Kurve zu beschreiben betrachtet man die Anderung des Betrages:
lim∆z→0
|∆w||∆z|
= limz→z0
|f(z)− f(z0)||z − z0|
= |f ′(z0)|.
Es werden also in einem Bereich um z0 die Abstande um denselben Faktor |f ′(z0)| ge-
streckt. Man nennt f im Kleinen maßstabsgetreu, wenn w = f(z) differenzierbar ist und
der Faktor |f ′(z0)| 6= 0.3
4.2 Konformer Abbildungssatz
Die Cauchy-Riemann Differentialgleichungen spielen in weiterer Folge auch eine wesent-
liche Rolle fur die konformen Abbildungen, da man mithilfe von ihnen nachweisen kann,
dass eine Abbildung konform ist.
Satz 4.2.1. Ist eine Abbildung f(z) fur einen Definitionsbereich D ∈ C analytisch, dann
ist fur jeden Punkt z ∈ D mit Ableitung f ′(z) 6= 0 die Abbildung konform. Das wiederum
heißt, dass fur diese Punkte Winkeltreue erfullt ist.
(Satz-Quelle: 4)
Beweis. Angenommen f ist eine analytische Funktion, dann kann mithilfe der Identifika-
tion der komplexen Ebene C mit der reellen Ebene R2 die Funktion f als Funktion von
2vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 117f.3vgl. ebda, S. 118f.4vgl. Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applications,
S. 314
18

R2 zu sich selbst gesehen werden.
f(x, y) := (<f(x+ iy),=f(x+ iy)) = (u(x, y), v(x, y))
Zunachst benotigt man noch die Jacobi-Matrix J . Grundsatzlich weiß man:
f(x, y) =
u(x, y)
v(x, y)
.
Die Jacobi Matrix der Funktion f lautet also:
J(x, y) :=∂(u, v)
∂(x, y)=
ux uy
vx vy
.
Da zu Beginn jedoch festgelegt wurde, dass es sich um eine analytische Funktion handelt
und somit die Cauchy-Riemann Differentialgleichungen erfullt sind, kann fur einen Punkt
die Jacobi Matrix definiert werden. So kann fur z = x + iy ∈ C festgelegt werden, dass
a = ux(x, y) = vy(x, y) und b = uy(x, y) = −vx(x, y) ist. Schreibt man a und b nun als
Polarkoordinaten, also (r cosϕ, r sinϕ), so erhalt man:
J(x, y) =
a b
−b a
= r
cosϕ sinϕ
− sinϕ cosϕ
,
die Matrix einer Drehstreckung.
Man stelle sich nun zwei Kurven ψ1(t) =
u1(t)
v1(t)
und ψ2(t) =
u2(t)
v2(t)
vor.
Bildet man den Differentialquotienten dieser z.B.:
dψ1
dt=
u′1(t)
v′1(t)
,
so erhalt man die Steigung der Tangenten dieser Kurve in jedem beliebigen Punkt.
Bildet man nun ψ1 ab, so ist:
f ◦ ψ1 = f(ψ1(t)).
19

Es darf nun angenommen werden, dass
df(ψ1(t))
dt= J · dψ1
dt.
Dasselbe darf auch fur ψ2 gemacht werden und da die Jacobi-Matrix eine Drehstreckung
bewirkt, bleibt der Winkel, den die beiden Tangenten einschließen, erhalten. Weiters bleibt
auch die Orientierung erhalten.
Es folgt daraus, dass es sich in jedem Punkt um eine konforme Abbildung handelt, fur den
seine Ableitung ungleich 0 ist.
(Beweis-Quelle: 5)
4.3 Die Riemannsche Zahlenkugel und stereographische
Projektionen
In einigen Fallen erwies sich die Gaußsche Zahlenebene als unpassend fur die geometrische
Veranschaulichung von komplexen Zahlen. So fuhrte der Mathematiker Bernhard Riemann
(1826-1866) die Riemannsche Zahlenkugel ein, da sich herausstellte, dass sich eine Kugel
besser fur die Darstellung eignet. Dabei entspricht jede komplexe Zahl genau einem Punkt
auf der Kugel. Ubertragen kann man einen Punkt der z-Ebene indem man ihn mit dem
Nordpol verbindet und die dabei entstandene Gerade mit der Kugelsphare schneidet (vgl.
Abbildung 4.1). Je weiter ein Punkt P vom Mittelpunkt der Kugel entfernt ist, umso naher
ist der Schnittpunkt Q, mit der Kugelsphare und der Geraden PN , dem Nordpol N der
Kugel. Wurde man sich nun den Punkt ∞ vorstellen, so wurde der Schnittpunkt mit der
Kugel genau dem Nordpol entsprechen.6
5vgl. Bruin, Peter: Proof of conformal mapping theorem. Zurich: 21. Marz 2013.Als Download: http://planetmath.org/sites/default/files/texpdf/34502.pdf (Zugriff: 22.12.2014)
6vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 103
20

4.3.1 Koordinatenbeziehungen
Somit kann man also die komplexen Zahlen mit Punkten des R3 beschreiben. Jede kom-
plexe Zahl z = x+ iy, kann man folgendermaßen auf die Einheitskugelsphare
S2 := {(ξ1, ξ2, ξ3) ∈ R3 :3∑
a=1
ξ2a = 1}
ubertragen. Setzt man nun mit N(0/0/1) als Nordpol und P (x/y/0) als Punkt ein, so
erhalt man:
Q =
ξ1
ξ2
ξ3
= λ
x
y
0
+ (1− λ)
0
0
1
(0 < λ ∈ R) .
Unter Einbeziehung der Einheitsspharengleichung3∑
a=1
ξ2a = 1 erhalt man:
λ =2
x2 + y2 + 1.
Dadurch konnen wir uber
ξ1 =2x
x2 + y2 + 1=
z + z
zz + 1, ξ2 =
2y
x2 + y2 + 1=i (−z + z)
zz + 1, ξ3 =
x2 + y2 − 1
x2 + y2 + 1=zz − 1
zz + 1
eine stereographische Projektion ζ von C auf S2 \ {N} und mit
x =ξ1
1− ξ3
, y =ξ2
1− ξ3
(4.1)
also z =ξ1 + iξ2
1− ξ3
die Umkehrabbildung beschreiben.7
7vgl. Forst, Wilhelm; Hoffmann, Dieter: Funktionentheorie erkunden mit Maple, S. 13
21

x, ξ1
y, ξ2
ξ3
N
P
Q
z
Abb. 4.1: Darstellung einer komplexen Zahl auf der Riemannschen Zahlenkugel8
4.3.2 Kreisverwandtschaft
Unter der Kreisverwandtschaft versteht man, dass Kreise in der z-Ebene auf der Rie-
mannschen Kugel auch als Kreise erscheinen. Um dies zeigen zu konnen verwendet man
die Eigenschaften der Koordinatenbeziehungen und betrachtet einen allgemeinen Kreis der
Form:
x2 + y2 + αx+ βy = γ und γ > −α2 + β2
4.
Der Mittelpunkt dieses Kreises ist (−α2,−β
2) und der Radius r2 = γ +
α2 + β2
4.
Durch Einsetzen von x, y aus 4.1 erhalt man die Gleichung:
ξ21
(1− ξ3)2+
ξ22
(1− ξ3)2+
αξ1
1− ξ3
+βξ2
1− ξ3
= γ
ξ21 + ξ2
2
1− ξ3
+ αξ1 + βξ2 = γ(1− ξ3),
welche fur Kreispunkte im R3 erfullt ist. Diese Punkte Q liegen jedoch auch auf der Rie-
mannschen Zahlenkugel und mussen somit die Kugelgleichung erfullen:
ξ3(1− ξ3)
1− ξ3
+ αξ1 + βξ2 = γ(1− ξ3)
8geanderter TikZ/LaTeX Code. Quelle: Trzeciak Tomas M.: Example: Stereographic and cylindri-cal map projections. 8. August 2008. Als Download: http://www.texample.net/tikz/examples/map-projections/ (Zugriff: 15.11.2014)
22
bzw.
ξ3(1 + γ) + αξ1 + βξ2 = γ.
Da es sich hierbei um eine lineare Gleichung handelt, befinden sich alle Bildpunkte in
derselben Ebene. Schneidet man diese Ebene mit der Riemannschen Kugel, so ergeben die
Schnittpunkte selbst wieder einen Kreis.9
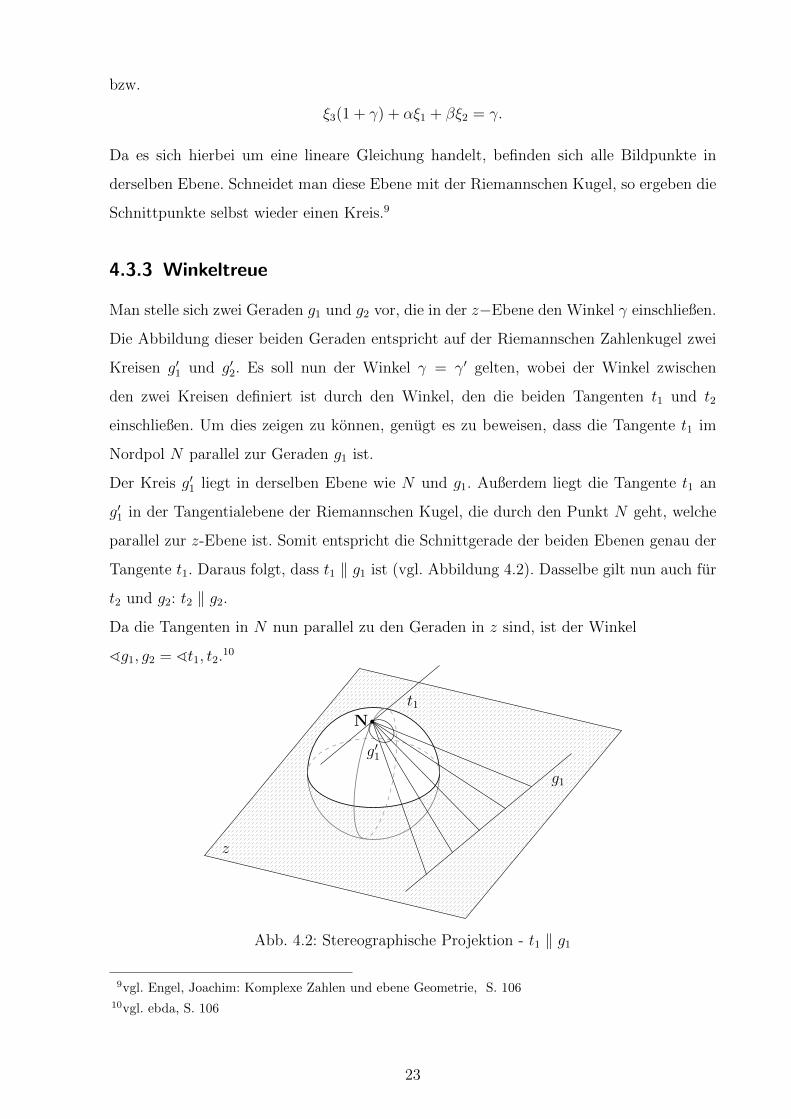
4.3.3 Winkeltreue
Man stelle sich zwei Geraden g1 und g2 vor, die in der z−Ebene den Winkel γ einschließen.
Die Abbildung dieser beiden Geraden entspricht auf der Riemannschen Zahlenkugel zwei
Kreisen g′1 und g′2. Es soll nun der Winkel γ = γ′ gelten, wobei der Winkel zwischen
den zwei Kreisen definiert ist durch den Winkel, den die beiden Tangenten t1 und t2
einschließen. Um dies zeigen zu konnen, genugt es zu beweisen, dass die Tangente t1 im
Nordpol N parallel zur Geraden g1 ist.
Der Kreis g′1 liegt in derselben Ebene wie N und g1. Außerdem liegt die Tangente t1 an
g′1 in der Tangentialebene der Riemannschen Kugel, die durch den Punkt N geht, welche
parallel zur z-Ebene ist. Somit entspricht die Schnittgerade der beiden Ebenen genau der
Tangente t1. Daraus folgt, dass t1 ‖ g1 ist (vgl. Abbildung 4.2). Dasselbe gilt nun auch fur
t2 und g2: t2 ‖ g2.
Da die Tangenten in N nun parallel zu den Geraden in z sind, ist der Winkel
^g1, g2 = ^t1, t2.10
N
z
t1
g1
g′1
Abb. 4.2: Stereographische Projektion - t1 ‖ g1
9vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 10610vgl. ebda, S. 106
23

4.4 Gebrochen lineare Funktionen
Definition 4.4.1. Man spricht von einer gebrochen linearen Funktion, wenn fur die Ab-
bildung gilt: w =az + b
cz + d, mit a, b, c, d ∈ C, unter der Voraussetzung, dass c, d nicht gleich-
zeitig 0 sein durfen.
(Definitions-Quelle: 11)
Fall 1: Zuerst betrachtet man c = 0 und d 6= 0:
⇒ w = f(z) =a
dz +
b
d= mz + n m, n ∈ C.
Diese Funktion wird als ganze lineare Funktion bezeichnet (vgl. Kapitel 4.4.1).
Fall 2: Als Nachstes setzt man fest, dass c 6= 0 ist. Der Ausgangsterm w =az + b
cz + dkann
mithilfe einer Polynomdivision umgeformt werden, sodass:
w =az + b
cz + d=a
c− ad− bc
c· 1
cz + d.
Wurde man nun ad− bc = 0 setzen, so wurde w =a
csein und daher ware die Abbildung
konstant und nicht umkehrbar. Aus diesem Grund kann man voraussetzen, dass ad−bc 6= 0
ist. In weiterer Folge kann man einer Abbildung die MatrixM =
a b
c d
zuweisen. Daraus
folgt, dass die Determinante der Matrix M ungleich 0 ist:
detM =
∣∣∣∣∣∣a b
c d
∣∣∣∣∣∣ 6= 0.
Es ergibt sich ein weiterer Sonderfall, wenn a = d = 0 und b = c = 1:
⇒ w = f(z) =1
z.
Dieser Sonderfall wird allgemein als Inversion bezeichnet (vgl. Kapitel 4.4.2).
Die Besonderheit von gebrochen linearen Funktionen liegt darin, dass man jede als
11vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 121
24

Verkettung einer ganzen linearen Funktion, einer Inversion und einer weiteren ganzen
linearen Funktion anschreiben kann.
p = h(z) = cz + d (ganze lineare Funktion)
q = k(p) =1
p(inverse Funktion)
w = l(q) =bc− ad
cq +
a
c(ganze lineare Funktion)
Verbindet man diese drei Funktionen miteinander f = l(q) ◦ k(p) ◦ h(z), so erhalt man
wieder die Ausgangsform von einer gebrochen linearen Funktion:12
w = f(z) = l(k(h(z))) =bc− ad
c
1
cz + d+a
c=az + b
cz + d.
4.4.1 Ganze lineare Funktionen
Definition 4.4.2. Ganze lineare Funktionen sind Spezialfalle von gebrochen linearen
Funktionen. Eine ganze lineare Funktion ist vorhanden, wenn f(z) = mz+n mit m,n ∈ C
und m 6= 0.
(Definitions-Quelle: 13)
Beispiel 4.4.1. Gegeben sei die Funktion f(z) = (1 + 2i)z.
Wir betrachten das Verhalten der Funktion am Beispiel des kartesischen Koordinatensys-
tems. Ihre Abbildung wird um den Winkel arg(1 + 2i) = tan−1(21) gedreht und um den
Faktor |1 + 2i| =√
5 gestreckt.
Da es sich um eine konforme Abbildung handelt, wird jede gerade Linie als gerade Linie
abgebildet, alle Winkel bleiben erhalten und somit werden auch alle Quadrate als solche
abgebildet.
12vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 121f.13vgl. The Open University: Complex Analysis UNIT D1 Conformal Mappings. 1. Auflage. Malta: Gu-
tenberg Press Limited, 2006, S. 5f.
25

u
v
0
−2 + 6i
x
y
0
2 + 2i
f(z) = (1 + 2i)z
Abb. 4.3: Abbildung des kartesischen Koordinatensystems unter f(z) = (1 + 2i)z
Es konnen nicht nur Drehungen und Streckungen durchgefuhrt werden, sondern auch Spie-
gelungen und Transformationen, bei denen ebenso die geometrischen Formen erhalten blei-
ben. Allerdings andert eine Spiegelung die Orientierung der Winkel und ist deshalb keine
konforme Abbildung. Funktionen die transformiert werden haben im allgemeinen die Form
f(z) = z + n und sind immer konforme Abbildungen.
Unter den linearen Funktionen gibt es einige Sonderfalle, die es wert sind, einzeln betrach-
tet zu werden:
1. m = 1 : w = z + n
(a) n = 0→ w = z.
Nachdem w = u + iv und z = x + iy ist folgt, dass x = u und y = v. Ist dies
der Fall, so spricht man von einer identischen Abbildung.
(b) n 6= 0→ w = z + b.
Diese Abbildung ist durch eine Translation dargestellt. Die geometrischen Fi-
guren sind zueinander kongruent.14
2. m 6= 1, n = 0 : w = mz
(a) |m| = 1⇒ m = cos γ + i sin γ, 0 ≤ γ < 2π
Daraus folgt, dass die Funktion mit dem Winkel γ um den Ursprung gedreht
wird.
14vgl. Greuel, Otto; Kadner, Horst: Komplexe Funktionen und konforme Abbildungen, S. 98f.
26

(b) m ∈ R, dann kann man m als m = p, p ∈ R+ schreiben.
→ w = pz, γ = 0 und die Funktion f ist eine zentrische Streckung mit p als
Streckungsfaktor.
(c) m = p(cos γ + i sin γ), p 6= 1, γ 6= 0
In diesem Fall wird eine Drehstreckung durchgefuhrt. Es wird um den Faktor
p skaliert und um den Winkel γ gedreht.15
Eine konforme Abbildung einer ganzen linearen Funktion kann somit als eine Zusammen-
setzung einer Streckung, einer Drehung und einer Verschiebung ausgedruckt werden.16
4.4.2 Inversion
Definition 4.4.3. Die Inversion oder Umkehrfunktion f ist definiert als:
f : C \ {0} → C, f : z 7→ w =1
z.
(Definitions-Quelle: 17)
4.4.2.1 Abbildung eines Punktes
Bildet man einen Punkt z = reiϕ unter der Inversion w =1
zab, so ist die Abbildung
dieses Punktes w = f(z) =1
reiϕ. Fur den abgebildeten Punkt gilt, dass die Distanz zum
Nullpunkt genau dem Kehrwert des anfanglichen Abstandes entspricht. Außerdem ist der
Winkel entgegen der Richtung des ursprunglichen, jedoch bleibt die Große dieselbe. Man
kann deshalb beobachten, wie jeder Punkt, der außerhalb des Einheitskreises liegt nach
Innen (vgl. Abbildung 4.4) und jeder der innerhalb liegt nach Außen (vgl. Abbildung 4.5)
abgebildet wird. Eine Ausnahme hierbei stellen diejenigen Punkte dar, welche exakt auf
dem Einheitskreis liegen (vgl. Abbildung 4.6). Sie werden auf der reellen Achse gespiegelt
und sind somit die zugehorigen konjugiert komplexen Zahlen.18
15vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 122f.16vgl. The Open University: Complex Analysis UNIT D1 Conformal Mappings, S. 5f.17vgl. ebda, S. 718vgl. Needham, Tristan: Anschauliche Funktionentheorie. 2. Auflage. Munchen: Oldenbourg Wissen-
schaftsverlag, 2011, S. 144
27

<{z}
={z}
ϕ−ϕ
O
z
r
1z
1r
Abb. 4.4:
z außerhalb des
Einheitskreises
<{z}
={z}
ϕ−ϕ
Ozr
1z
1r
B
Abb. 4.5:
z innerhalb des
Einheitskreises
<{z}
={z}
ϕ−ϕ
O
z
r
1z
1r
= r
B
Abb. 4.6:
z auf dem Einheitskreis
4.4.2.2 Abbildungen von Kreisen und Geraden
In den folgenden zwei Beispielen betrachten wir die Abbildung einer Geraden und eines
Kreises durch die Inversion:
Beispiel 4.4.2. Gegeben sei die Gerade y + 4x = 1.
Wir wissen, dass z = x+ iy und w = u+ iv ist. Zusatzlich muss gelten, da die Abbildung
unter w =1
zdurchgefuhrt wird, dass z =
1
w:
z = x+ iy =1
u+ iv=
u− ivu2 + v2
.
Man kann nun x und y durch u und v ausdrucken:
x =u
u2 + v2, y =
−vu2 + v2
. (4.2)
28

Nun setzt man fur x, y in die Ausgangsgleichung ein:
−vu2 + v2
+ 4
(u
u2 + v2
)= 1
−v + 4u = u2 + v2
−u2 + 4u− v2 − v = 0
(−1)
[(u− 2)2 − 4 +
(v +
1
2
)2
− 1
4
]= 0
(u− 2)2 +
(v +
1
2
)2
=17
4. (4.3)
Betrachtet man die Gleichung 4.3, so kann man erkennen, dass es sich um eine Kreis-
gleichung der Form (u2 − <M)2 + (v2 − =M)2 = r2 handelt. Die Abbildung der Geraden
y+4x = 1 unter der Inversion entspricht also einem Kreis mit dem Mittelpunkt m = 2− i
2
und dem Radius r =
√17
2.
Beispiel 4.4.3. Gegeben sei der Kreis (x− 3)2 + y − 42 = 25.
(x− 3)2 + (y − 4)2 = 25
x2 − 6x+ 9 + y2 − 8y + 16 = 25
x2 − 6x+ y2 − 8y = 0
Da wir nach 4.2 wissen, dass x =u
u2 + v2, y =
−vu2 + v2
ist, kann man fur x und y in die
obige Gleichung einsetzen:
(u
u2 + v2
)2
− 6
(u
u2 + v2
)+
(−v
u2 + v2
)2
− 8
(−v
u2 + v2
)= 0
u2 + (−v)2
(u2 + v2)2− 6
(u
u2 + v2
)− 8
(−v
u2 + v2
)= 0
1
u2 + v2− 6
(u
u2 + v2
)− 8
(−v
u2 + v2
)= 0
1− 6u+ 8v = 0
6u− 8v = 1. (4.4)
29

Aus der Gleichung 4.4 kann man erkennen, dass der Kreis als Gerade abgebildet wird.
Grund dafur ist, dass der Kreis in der z-Ebene durch den Koordinatenursprung geht.19
Lemma 4.4.1. Jede Punktmenge ∈ C, welche die Gleichung der Form
a(x2 + y2) + bx+ cy + d = 0 mit a, b, c, d ∈ R und b2 + c2 > 4ad erfullt, stellt eine Gerade
oder einen Kreis dar. Dabei gilt:
(i) Wenn a = 0 handelt es sich immer um eine Gerade.
(ii) Nur wenn d = 0 geht der Kreis oder die Gerade durch den Koordinatenursprung.20
Beweis.
(i) Ist a=0, dann folgt nach b2 + c2 > 4ad, dass b2 + c2 > 0 sein muss. Dies ist allerdings
nur zutreffend, wenn b und c nicht gleichzeitig 0 sind. Daraus lasst sich schließen,
dass unter dieser Bedingung immer eine Gerade entstehen muss.
(ii) Fur a 6= 0 darf durch a dividiert werden:
x2 + y2 +bx
a+cy
a+d
a= 0(
x+b
2a
)2
− b2
4a2+(y +
c
2a
)2
− c2
4a2+
4ad
4a2= 0(
x+b
2a
)2
+(y +
c
2a
)2
=b2 + c2 − 4ad
4a2.
Ist b2 + c2 > 4ad, so ist die Gleichung eine Kreisgleichung.
Der Kreis oder die Gerade geht durch den Ursprung, dann und nur dann, wenn
x = y = 0, was wiederum genau dann erfullt ist, wenn d = 0.
(Beweis-Quelle: 21)
19vgl. The Open University: Complex Analysis UNIT D1 Conformal Mappings, S. 8f.20vgl. ebda, S. 921vgl. ebda, S. 10
30
4.5 Mobiustransformationen
Definition 4.5.1. Jede Abbildung in der Form w = f(z) =az + b
cz + dmit a, b, c, d ∈ C
und ad − bc 6= 0 nennt man Mobiustransformation. Sie sind definiert im Bereich aller
komplexer Zahlen, fur die cz + d 6= 0 gilt. Ist c 6= 0, so umfasst der Definitionsbereich
Df = C \ {−dc} und fur die Wertemenge Wf = C \ {a
c}. Andernfalls umfasst sowohl die
Wertemenge als auch der Definitionsbereich alle Elemente von C.
(Definitions-Quelle: 22)
Diese Transformationen sind nach dem deutschen Mathematiker August Ferdinand Mobius
benannt und werden haufig auch als bilineare Transformationen oder gebrochen lineare
Transformationen (siehe Kapitel 4.4) bezeichnet.
4.5.1 Eigenschaften von Mobiustransformationen
Die wichtigsten Eigenschaften der Mobiustransformationen seien hier aufgezahlt:
(i) Wie bereits in Kapitel 4.4 gezeigt, lasst sich jede Mobiustransformation als Kombi-
nation zweier ganzer linearer Funktionen und einer inversen Funktion schreiben.
(ii) Weiters wurde bereits in Lemma 4.4.1 behandelt, dass jede Mobiustransformation
Kreise und Geraden als solche abbildet.
(iii) Aus dem konformen Abbildungssatz (vgl. Kapitel 4.2) folgt, dass
Mobiustransformationen konform sind. Es gilt somit fur jeden Punkt
z ∈ C \ {−dc, ∞}, dass dieser komplex differenzierbar und seine Ableitung
f ′(z) 6= 0 und daher dessen Abbildung konform ist.
(iv) Mobiustransformationen bilden eine Gruppe. Fur Mobiustransformationen gilt, dass
das Inverse und das Produkt von ihnen ebenfalls Mobiustransformationen sind und
sie sind somit geschlossen unter der Operation Multiplikation. Das Inverse der Funk-
tion f(z) ist gegeben durch:dz − b−cz + a
.
Aus diesen Anderungen a→ d, b→ −b, c→ −c, d→ a, woraus sich ad−bc→ ad−bc
ergibt, folgt, dass das Inverse von f eine Mobiustransformation ist.
22vgl. Forst, Wilhelm; Hoffmann, Dieter: Funktionentheorie erkunden mit Maple, S. 235
31

Um zu zeigen, dass das Produkt von zwei Transformationen auch eine
Mobiustransformation ist, bildet man ihr Produkt. Angenommen z2 = f2(z) und
w = f1(z2) und f1, f2 sind von der Form f(z) =az + b
cz + d, dann erhalt man durch
Verknupfen von f1 und f2, sprich w = f1(f2(z)) = f3:
f3(z) =a3z + b3
c3z + d3
.
Es ist nun moglich a3 = a1a2 +b1c2, b3 = a1b2 +b1d2, c3 = c1a2 +d1c2, d3 = c1b2 +d1d2
zu berechnen. Es bleibt zu zeigen, dass a3d3 − b3c3 = (a1d1 − b1c1)(a2d2 − b2c2) 6= 0,
damit f3(z) ebenfalls eine Mobiustransformation ist.23
Beweis. Damit a3d3 − b3c3 = (a1d1 − b1c1)(a2d2 − b2c2) 6= 0 erfullt ist, muss jeder
Faktor (a1d1 − b1c1) und (a2d2 − b2c2) ungleich 0 sein.
Wir wissen, aus der Definition (vgl. 4.5.1) einer Mobiustransformation (bilinearen
Transformation), dass ad − bc 6= 0 ist. Außerdem ist sowohl f1 als auch f2 jeweils
eine gebrochen lineare Transformation. Daraus folgt, dass fur beide Faktoren gelten
muss, dass sie ungleich 0 sind. Nachdem wir nun das Produkt zweier Faktoren, welche
nicht 0 sein durfen, nach Definition bilden, muss dieses auch kleiner oder großer als
0 sein.
Die Identitat dieser Gruppe ist gegeben durch b = c = 0 und a = d = 1, wodurch
w = f(z) zu w = z reduziert wird.
Es ist somit gezeigt, dass Mobiustransformationen eine Gruppe bilden.
(v) Jede Transformation hat 1 oder 2 sogenannte Fixpunkte, welche bei der Abbildung
von z → w ihre Position beibehalten. Sie werden also nicht von einer Ebene auf eine
andere, sondern auf die Ebene selbst abgebildet. Man kann diese Punkte durch Losen
der Gleichung z =az + b
cz + d, oder anders geschrieben cz2−az+dz− b = 0, berechnen.
Interessanter ist die zweite Form dieser Gleichung, da man erkennen kann, dass mit
Ausnahme von c = 0, a = d oder c = b = 0, eine quadratische Gleichung vorliegt
und man zwei Fixpunkte erhalt.24
23vgl. Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applications,S. 366f.
24vgl. ebda, S. 370
32
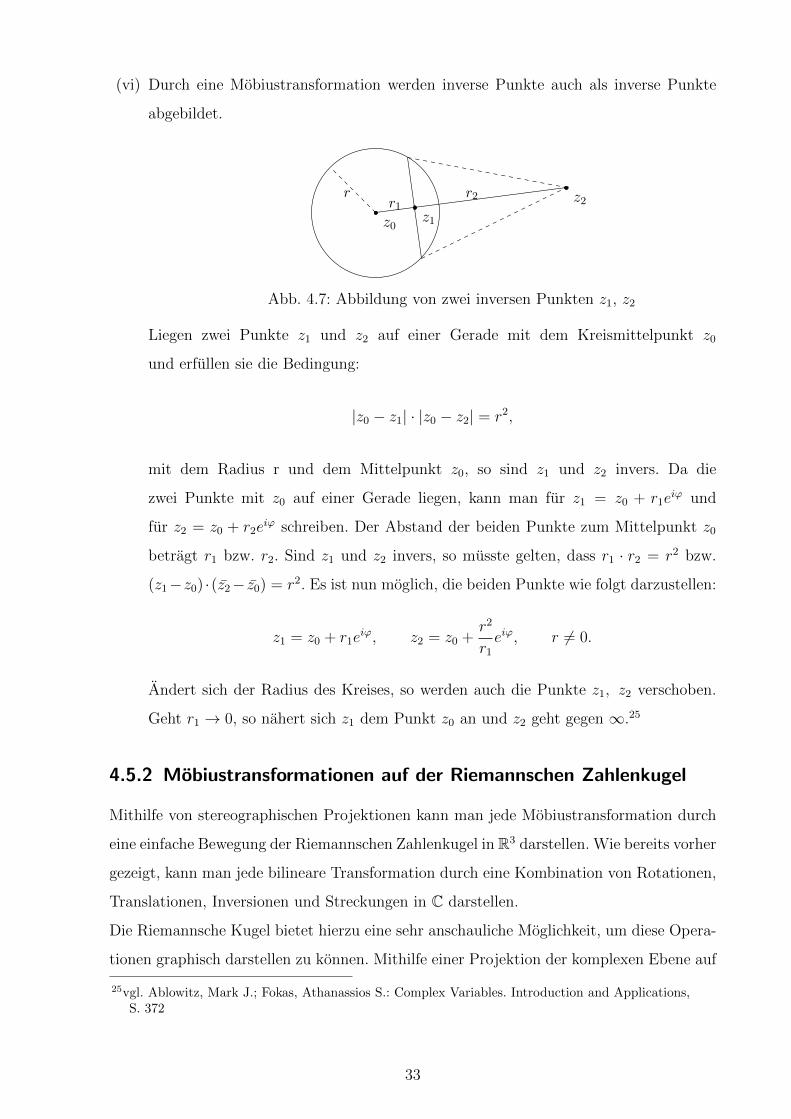
(vi) Durch eine Mobiustransformation werden inverse Punkte auch als inverse Punkte
abgebildet.
z0
z2
z1
rr1
r2
Abb. 4.7: Abbildung von zwei inversen Punkten z1, z2
Liegen zwei Punkte z1 und z2 auf einer Gerade mit dem Kreismittelpunkt z0
und erfullen sie die Bedingung:
|z0 − z1| · |z0 − z2| = r2,
mit dem Radius r und dem Mittelpunkt z0, so sind z1 und z2 invers. Da die
zwei Punkte mit z0 auf einer Gerade liegen, kann man fur z1 = z0 + r1eiϕ und
fur z2 = z0 + r2eiϕ schreiben. Der Abstand der beiden Punkte zum Mittelpunkt z0
betragt r1 bzw. r2. Sind z1 und z2 invers, so musste gelten, dass r1 · r2 = r2 bzw.
(z1−z0) ·(z2− z0) = r2. Es ist nun moglich, die beiden Punkte wie folgt darzustellen:
z1 = z0 + r1eiϕ, z2 = z0 +
r2
r1
eiϕ, r 6= 0.
Andert sich der Radius des Kreises, so werden auch die Punkte z1, z2 verschoben.
Geht r1 → 0, so nahert sich z1 dem Punkt z0 an und z2 geht gegen ∞.25
4.5.2 Mobiustransformationen auf der Riemannschen Zahlenkugel
Mithilfe von stereographischen Projektionen kann man jede Mobiustransformation durch
eine einfache Bewegung der Riemannschen Zahlenkugel in R3 darstellen. Wie bereits vorher
gezeigt, kann man jede bilineare Transformation durch eine Kombination von Rotationen,
Translationen, Inversionen und Streckungen in C darstellen.
Die Riemannsche Kugel bietet hierzu eine sehr anschauliche Moglichkeit, um diese Opera-
tionen graphisch darstellen zu konnen. Mithilfe einer Projektion der komplexen Ebene auf
25vgl. Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applications,S. 372
33

die Kugel kann man, mit einfachen Bewegungen dieser, die Transformationen darstellen:
◦ Rotationen: Durch Drehen der Kugel um die vertikale Achse (0, 0, ξ3).
◦ Translationen: Diese entsprechen einer Parallelverschiebung der Kugel entlang der
Ebene (ξ1, ξ2, 0).
◦ Streckungen: Indem man die Kugel entlang seiner vertikalen Achse (0, 0, ξ3) ver-
schiebt, verkleinert oder vergroßert man die Abbildung auf C.
◦ Inversion: Eine Inversion erhalt man, indem man die Kugel um die horizontale-Achse
(ξ1, 0, 0) mit dem Winkel π rotieren lasst.26
Abb. 4.8: Darstellung einer Mobiustransformation durch Bewegungen der RiemannKugel27
4.6 Abbildung von Kreisen und Geraden
Satz 4.6.1. Wenn zwei Kreise K1 und K2 zwei allgemeine Kreise darstellen, so existiert
immer eine Mobiustransformation, welche den Kreis K1 zu K2 abbildet.
(Satz-Quelle: 28)
26vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 148f.27Quelle: Douglas N. Arnold and Jonathan Rogness: Mobius Transformations Revealed. 2007.
Als Download: http://www.ima.umn.edu/∼arnold/moebius/ (Zugriff: 21.12.2014)28vgl. The Open University: Complex Analysis UNIT D1 Conformal Mappings, S. 24
34

Beweis. Man nimmt drei voneinander verschiedene Punkte α, β, γ, welche auf dem
Kreis K1 liegen und bildet diese ab. Fur diese drei Punkte existiert genau eine
Mobiustransformation f(z), die sie zu α′, β′, γ′ abbildet. Da die Abbildung Kreise er-
gibt und α, β, γ auf K1 liegen, mussen α′, β′, γ′ sich auf K2 befinden. Die Abbildung
des Kreises K1 entspricht dem Kreis K2.
(Beweis-Quelle: 29)
Beispiel 4.6.1. Gegeben sei der Kreis K1 = {z : |z − (1 + i)| =√
2}, welcher durch die
Mobiustransformation f(z) =−z + 2
z + 2abgebildet wird:
Zuerst ist es notwendig drei Punkte des Kreises in der z-Ebene zu bestimmen:
α = 0, β = 2, γ = 2 + 2i.
Als nachsten Schritt bildet man diese in die w-Ebene ab:
α = 0 7→ 1 = α′
β = 2 7→ 0 = β′
γ = 2 + 2i 7→ −1 + 2i
5= γ′.
Unter der Abbildung f(z) =−z + 2
z + 2wird der Kreis K1 = {z : |z − (1 + i)| =
√2} zum
Kreis K2 = {z : |z − 1
2(1 − i)| =
√0, 5}, welcher den Mittelpunkt z0 =
1− i2
und den
Radius r =√
0, 5 hat, abgebildet. Die graphische Darstellung dieser konformen Abbildung
ist in Abbildung 4.9 dargestellt.
<{z}
={z}
<{z}
={z}
0 2
2 + 2i
0 1
−1 + 2i
5
K1
K2
f(z) =−z + 2
z + 2
Abb. 4.9: Abbildung des Kreises K1 mit f(z) =−z + 2
z + 2nach K2
29vgl. The Open University: Complex Analysis UNIT D1 Conformal Mappings, S. 24
35

Beispiel 4.6.2. Gegeben sei die Gerade L = {z : <(z) = =(z)} ∪ {∞}, welche durch die
Mobiustransformation f(z) =z + i
z − iabgebildet wird.
Um eine Gerade abbilden zu konnen, ist es moglich nach dem exakt gleichen Schema
wie im vorhergehenden Beispiel vorzugehen. Da eine Gerade nur eine Spezialform eines
allgemeinen Kreises darstellt, ist ebenfalls das Dreipunktschema anwendbar, wobei durch
Verwendung von ∞ die Berechnung haufig vereinfacht werden kann.30
Zuerst wahlen wir drei Punkte α, β, γ ∈ L:
α = 0, β = 1 + i, γ =∞.
Anschließend werden diese drei Punkte abgebildet:
α = 0 7→ −1 = α′
β = 1 + i 7→ 1 + 2i = β′
γ =∞ 7→ 1 = γ′.
Durch Abbilden der Geraden L mit der gebrochen linearen Transformation f(z) =z + i
z − ientsteht der Kreis K = {z : |z − i| =
√2} (siehe Abbildung 4.10) mit Mittelpunkt z0 = i
und Radius r =√
2, .
<{z}
={z}
<{z}
={z}
0
1 + i
−1 1
1 + 2i
∞
K
Lf(z) =
z + i
z − i
Abb. 4.10: Abbildung der Geraden L durch f(z) =z + i
z − inach K
30vgl. The Open University: Complex Analysis UNIT D1 Conformal Mappings, S. 26
36

5 Anwendung in der Aerodynamik -
Tragflachenprofile
5.1 Motivation
In den vorangehenden Kapiteln wurde die Theorie von den Anfangen der komplexen Zahlen
bis hin zu wichtigen Grundlagen der konformen Abbildungen behandelt. Damit kann nun,
ausgehend von den vorhergehenden Kapiteln, auf eine Anwendung in der Aerodynamik
eingegangen werden. Der russische Mathematiker und Aerodynamiker Nikolay Yegorovich
Zhukovsky (1847-1921) gilt als einer der wichtigsten Vorreiter fur die moderne Aerodyna-
mik. Dank seiner Verbindung der Stromungslehre mit den konformen Abbildungen gelang
es erstmals die Stromungen auf einem Tragflachenprofil darzustellen. Durch Anwendung
der Joukowski Funktion an Kreisen konnen Tragflachenprofile berechnet und konstruiert
werden.
5.2 Die Funktion w = z2
Definition 5.2.1. Die Funktion w = z2 ist eine konforme Abbildung fur alle Punkte
z ∈ C\{0}. Durch ihre Anwendung werden die Radien quadriert und die Winkel verdoppelt.
(Definitions-Quelle: 1)
Betrachtet man eine komplexe Zahl:
z = x+ iy = r(cosϕ+ i sinϕ)
1vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 153
37

und bildet diese mithilfe von w = f(z) = z2 ab, so erhalt man:
w = x2 − y2 + 2ixy = r2(cos 2ϕ+ i sin 2ϕ). (5.1)
Vergleicht man nun diese Abbildung eines Punktes z mit dessen Darstellung in der
z-Ebene, so kann man erkennen, dass der Radius quadriert wurde und sich der Win-
kel ϕ verdoppelt hat.
Aufgrund des Quadrats ergeben sich bei der Abbildung einige Besonderheiten:
(i) Fur <(z) > 0 gilt, dass sich auch seine Abbildung im positiven reellen Bereich
befindet.
(ii) Ist <(z) < 0, wird dieser ebenfalls im positiven reellen Bereich abgebildet.
(iii) =(z) wird jedoch immer im negativen Bereich der reellen Achse abgebildet.2
5.2.1 Abbildung von Geraden
Satz 5.2.1. Die Abbildung einer Geraden durch die Funktion w = z2, die einen Winkel
ϕ mit der reellen Achse einschließt und den Abstand d > 0 auf der imaginaren Achse
zum Koordinatenursprung hat, ist eine Parabel. Der Winkel, den diese Parabel mit der
horizontalen Achse einschließt, betragt 2ϕ und die Distanz zum Ursprung ist d2.
(Satz-Quelle: 3)
Beweis. Nachdem nach 5.1 die Winkel verdoppelt und die Radien quadriert werden, genugt
es zu zeigen, dass eine Gerade, mit dem Ausgangsabstand |d|, als Parabel mit Abstand
d2 abgebildet wird. Ohne Verletzung der Allgemeinheit genugt es zu zeigen, dass dies fur
eine zur reellen Achse parallelen Gerade der Form y = d stimmt.
Jeder Punkt, der auf der Geraden liegt, ist gegeben durch z = x + id. Bildet man jeden
beliebigen Punkt mit w = z2 ab, so erhalt man:
w = z2 = (x+ id)2 = x2 + 2xid− d2.
2vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 153f.3vgl. ebda, S. 154
38
Betrachtet man den letzten Teil der Gleichung, so fallt auf, dass es sich um eine quadrati-
sche Gleichung der Art y = ax2 + bx+ c, mit a = 1, b = 2id und c = −d2 handelt. Daraus
folgt, dass das Abbild eine Parabel mit dem Abstand d2 zum Ursprung ist.
(Beweis-Quelle: 4)
5.2.2 Abbildung von Kreisen
Definition 5.2.2. Durch Abbildung eines Kreises K mit der Funktion w = z2 entsteht
eine Pascalsche Schnecke, welche genau dann eine innere Schleife hat, wenn der Koordi-
natenursprung der z-Ebene innerhalb des Kreises liegt.
(Definitions-Quelle: 5)
(a) Fur jeden Kreis, dessen Mittelpunkt dem Ursprung entspricht, gilt, dass die Abbil-
dung eines solchen wiederum denselben Mittelpunkt erhalt und nur dessen Radius r
quadriert wird.
(b) Ist r = 1, so bleibt auch der Radius konstant.
(c) Ist das Bild eines Kreises achsensymmetrisch, so schließt seine Symmetrieachse, im
Vergleich zur Geraden, welche den Koordinatenursprung mit dem Mittelpunkt des
Kreises verbindet, einen doppelt so großen Winkel mit der reellen Achse ein.6
Satz 5.2.2. Die Abbildung eines Kreises K mit dem Radius r und dem Mittelpunkt m,
dessen Ursprung um d verschieden ist, schneidet ihre Symmetrieachse im Abstand (r±d)2
zum Koordinatenursprung, welcher nicht zwischen den beiden Schnittpunkten liegt.
(Satz-Quelle: 7)
Beweis. Ebenfalls wie bei Geraden gilt, dass Radien quadriert und Winkel verdoppelt
werden. Daher genugt es zu zeigen, wie sich die beiden Schnittpunkte verhalten, wenn
sich m auf der reellen Achse befindet. Die Abbildung hat die Nullstellen (r + d)2 und
(r−d)2. Da die Nullstellen des Kreises (r+d) und (r−d) Elemente der reellen Achse, also
4vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 1545vgl. ebda, S. 1566vgl. ebda, S. 1557vgl. ebda, S. 155
39

reelle Zahlen sind, die mit w = z2 auf (r + d)2 und (r− d)2 abgebildet werden, folgt, dass
diese ebenfalls reelle Zahlen sind, da das Quadrat einer reellen Zahl immer einer solchen
entspricht.
(Beweis-Quelle: 8)
5.3 Joukowski Funktion
Nikolay Y. Zhukovsky (Joukowski) hat eine komplexe Funktion gefunden, durch die es
moglich ist einen Kreis als Kontur eines stromlinienformigen Korpers darzustellen.
Definition 5.3.1. Gegeben ist die Joukowski Transformation durch:
J(z) :=1
2
(z +
1
z
).
Man definiert J fur z ∈ C \ {0} als analytisch und fur ∀z ∈ C \ {−1, 0, 1} als konforme
Abbildung.
(Definition-Quelle: 9)
5.3.1 Zusammensetzung der Joukowski Funktion
Die Joukowski Abbildung kann mithilfe verschiedener Funktionen dargestellt werden. Um
diese Transformationen zu bestimmen, ist es sinnvoll zuerst den Quotientenw − 1
w + 1zu
betrachten:
w − 1
w + 1=
1
2
(z +
1
z
)− 1
1
2
(z +
1
z
)+ 1
=
1
2
(z +
1
z
)− 1
1
2
(z +
1
z
)+ 1
·(
2z
2z
)=
=z2 − 2z + 1
z2 + 2z + 1=
(z − 1
z + 1
)2
. (5.2)
Es lasst sich nun aus Gleichung 5.2 folgern:
w =1
2
(z +
1
z
).
8vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 1569vgl. Forst, Wilhelm; Hoffmann, Dieter: Funktionentheorie erkunden mit Maple, S. 245
40

Verwendet man nun die Transformationen
g(z) =z − 1
z + 1, g−1(z) =
1− z1 + z
, h(z) = z2,
so ist es unter Einbezug der Gleichung 5.2 moglich durch Verketten der zwei
Mobiustransformationen g(z) und g−1(z) und der Transformation w = z2:
w = f(z) = g−1(h(g(z))),
die Joukowski Funktion zu erhalten.10
5.3.2 Graphische Darstellung der Joukowski Funktion und
Auswirkungen von Anderungen der Parameter x, y
Durch Verschieben des Kreises im komplexen Raum ergeben sich durch die Joukowski
Transformation verschiedene Arten von Abbildungen. Jedoch nur durch Verschiebung in
eine bestimmte Richtung ist es moglich Joukowski-Tragflachenprofile zu erzeugen.
Im Folgenden werden verschiedene Falle der Abbildungen gezeigt:
(i) Die Abbildung des Einheitskreises K = {z : |z| = 1} entspricht einer Geraden
entlang der reellen Achse.
Abb. 5.1: Joukowski Transformation des Kreises K = {z : |z| = 1}
10vgl. Engel, Joachim: Komplexe Zahlen und ebene Geometrie, S. 156f.
41

(ii) Entspricht der Mittelpunkt m dem Koordinatenursprung, so wird der Kreis K, mit
r ∈ R+ \ {1}, als Ellipse abgebildet.
Abb. 5.2: Joukowski Transformation des Kreises K = {z : |z| = 1, 5}
(iii) Wenn der Kreis nun entlang der reellen Achse verschoben wird, ergeben sich zwei
weitere unterschiedliche Abbildungen. Wird der Kreis in die positive Richtung der
reellen Achse verschoben, entsteht ein in die negative reelle Achse schmalerwerdendes
symmetrisches Tragflachenprofil. Bei Verschiebung in den negativen Bereich wird
diese um die imaginare Achse gespiegelt.
Abb. 5.3: Joukowski Transformation des Kreises K = {z : |z − 0, 5| = 1, 5}
42
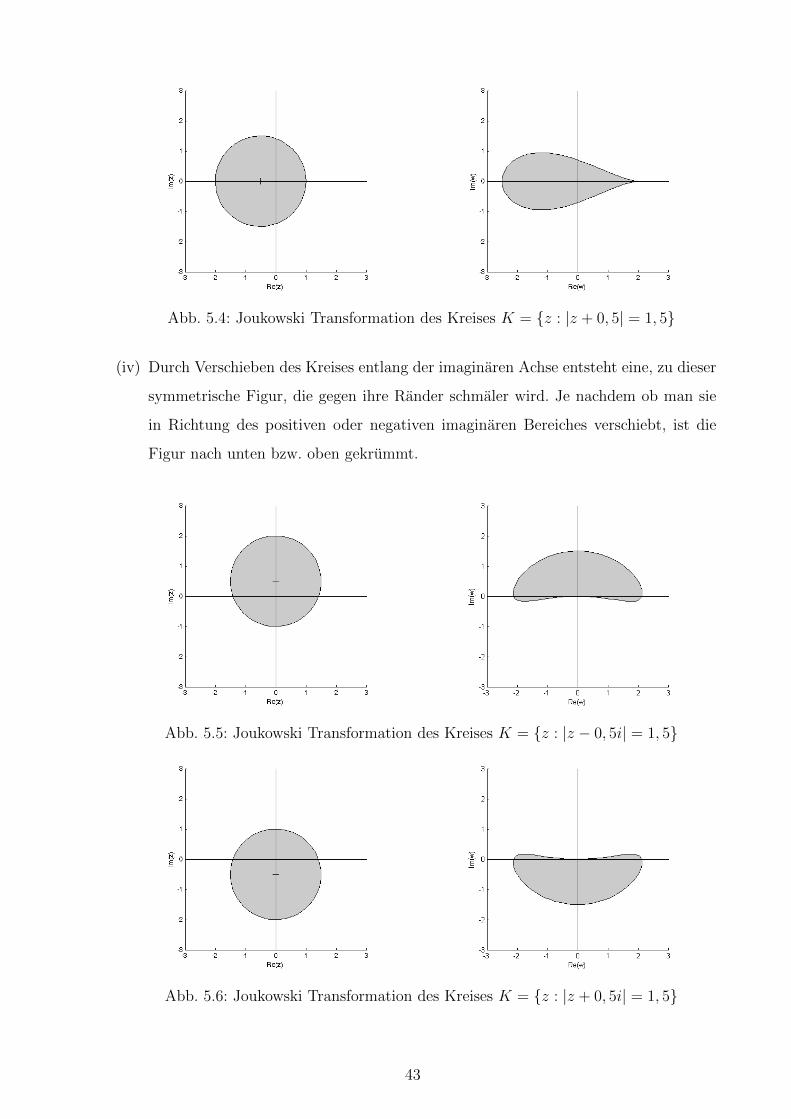
Abb. 5.4: Joukowski Transformation des Kreises K = {z : |z + 0, 5| = 1, 5}
(iv) Durch Verschieben des Kreises entlang der imaginaren Achse entsteht eine, zu dieser
symmetrische Figur, die gegen ihre Rander schmaler wird. Je nachdem ob man sie
in Richtung des positiven oder negativen imaginaren Bereiches verschiebt, ist die
Figur nach unten bzw. oben gekrummt.
Abb. 5.5: Joukowski Transformation des Kreises K = {z : |z − 0, 5i| = 1, 5}
Abb. 5.6: Joukowski Transformation des Kreises K = {z : |z + 0, 5i| = 1, 5}
43

(v) Liegt der Mittelpunkt m des Kreises K innerhalb des 1. Quadranten, so ergibt sich
ein um die imaginare Achse gespiegeltes Tragflachenprofil. Dabei muss gelten, dass
m = x+ iy, mit x, y ∈ R+ und |x|, |y| < r.
Abb. 5.7: Joukowski Transformation des KreisesK = {z : |z − (0, 35 + 0, 35i)| = 1, 4}
(vi) Befindet sich nun der Mittelpunkt des Kreises im 4. Quadranten, so ist die Joukowski
Transformation ahnlich zu dem Tragflachenprofil aus Fall (v), aber um die reelle
Achse gespiegelt.
Abb. 5.8: Joukowski Transformation des KreisesK = {z : |z − (0, 35− 0, 35i)| = 1, 4}
44

(vii) Eine weitere Moglichkeit ist, dass m im 3. Quadranten liegt, wodurch wieder
ein ahnliches Tragflachenprofil wie im Fall (vi) entsteht, diesmal jedoch um die
imaginare Achse gespiegelt.
Abb. 5.9: Joukowski Transformation des KreisesK = {z : |z − (−0, 35− 0, 35i)| = 1, 4}
(viii) Die eigentlichen, fur die Aerodynamik interessanten, Joukowski-Tragflachenprofile
ergeben sich, wenn fur den Kreismittelpunkt m = x+ iy gilt:
x ∈ R−, y ∈ R+ und x, y < r.
⇒ m muss sich im 2. Quadranten befinden.11
Abb. 5.10: Joukowski Tragflachenprofil durch Transformation des KreisesK = {z : |z − (−0, 12 + 0, 15i)| = 1, 15}
11vgl. Walsh, Paul: Introduction to Conformal Mapping in Aerodynamics. 2007. Als Download:http://www.ryerson.ca/∼p3walsh/aer504/conformal.doc (Zugriff: 28.11.2013), S. 4f
45

6 Zusammenfassung
In dieser vorwissenschaftlichen Arbeit wird das Thema Conformal Mapping (konforme
Abbildungen) und eine Anwendung dieser, zur Berechnung von Tragflachenprofilen
behandelt. Es werden die grundlegenden Eigenschaften, die fur das konforme Abbilden
relevant sind, dargestellt.
Da konforme Abbildungen auf komplexen Zahlen aufbauen, werden der Leserin
bzw. dem Leser diese in Kapitel 2 naher gebracht.
Anschließend beschaftigt sich das 3. Kapitel mit komplexen Funktionen, die eine Grundla-
ge fur die konformen Abbildungen sind. Dieser Teil erlautert, was eine komplexe Funktion
ist, wann man von einer analytischen Funktion spricht und wie man im Komplexen
differenziert.
Nach dieser Einfuhrung folgt eine Auseinandersetzung mit konformen Abbildungen in
Kapitel 4. In diesem Abschnitt der Arbeit werden die Besonderheiten der konformen
Abbildungen gezeigt. Aus der Definition der konformen Abbildung geht hervor, dass sie
immer winkeltreu, komplex differenzierbar, orientierungstreu sowie injektiv ist.
Im 5. Kapitel folgt nun eine Anwendung der konformen Abbildung in der Aerodynamik.
Dieses Kapitel setzt sich zum Ziel zu zeigen, wie man zur Ausgangsfunktion (Joukow-
ski Funktion), die zur Berechnung von Tragflachenprofilen dient, kommt und welche
Voraussetzungen fur die Ausgangssituation gelten mussen, damit ein Tragflachenprofil
abgebildet werden kann.
Die Konforme Abbildung ist eine Methode um die Theorie der Potentialstromung
fur die praktische Aerodynamik nutzbar zu machen. Damit lassen sich Auftriebsberech-
nungen an Tragflachen durchfuhren.
Eine weitere Vertiefung in dieses Thema wurde den Rahmen dieser Arbeit uberschreiten.
46
Literaturverzeichnis
Ablowitz, Mark J.; Fokas, Athanassios S.: Complex Variables. Introduction and Applica-
tions. 2. Auflage. Cambridge: Cambridge University Press, 2003.
Bobenko, Alexander I.: Komplexe Analysis. Berlin: 21. November 2006. Als Download:
http://page.math.tu-berlin.de/∼bobenko/Lehre/Skripte/FT.pdf
(Zugriff: 12.12.2014)
Bruin, Peter: Proof of conformal mapping theorem. Zurich: 21. Marz 2013. Als Download:
http://planetmath.org/sites/default/files/texpdf/34502.pdf (Zugriff: 22.12.2014)
Engel, Joachim: Komplexe Zahlen und ebene Geometrie. 2., verbesserte Auflage. Munchen:
Oldenbourg Wissenschaftsverlag, 2011.
Forst, Wilhelm; Hoffmann, Dieter: Funktionentheorie erkunden mit Maple. 2.,
uberarbeitete und aktualisierte Auflage. Berlin: Springer Spektrum, 2012.
Greuel, Otto; Kadner, Horst: Komplexe Funktionen und konforme Abbildungen. 3. Auf-
lage. Leipzig: Springer Fachmedien, 1990.
Heuser, Harro: Lehrbuch der Analysis Teil 1. 10., durchgesehene Auflage. Wiesbaden:
Springer Fachmedien, 1993.
Johnson, R.S.: An introduction to the theory of complex variables. 2012. Als Download:
http://bookboon.com/de/an-introduction-to-the-theory-of-complex-variables-ebook
(Zugriff: 24.08.2014)
Lowen, R.; Schroth, A.E.; Wirths, K.-J.: Funktionentheorie. Als Download:
http://www.iaa.tu-bs.de/et/ft.pdf (Zugriff: 12.11.2014)
47

Mejlbro, Leif: Elementary Analytic Functions. Complex Functions Theory a-1. 2010.
Als Download: http://bookboon.com/de/elementary-analytic-functions-ebook
(Zugriff: 03.09.2014)
Needham, Tristan: Anschauliche Funktionentheorie. 2. Auflage. Munchen: Oldenbourg
Wissenschaftsverlag, 2011.
Roth, Jurgen: Die Zahl i - fantastisch, praktisch, anschaulich. Sekundarstufe I, 10. Schul-
jahr. In: mathematik lehren, 2003. Nr. 121, S. 47-49.
The Open University: Complex Analysis UNIT A2 Complex Functions. 1. Auflage.
Malta: Gutenberg Press Limited, 2008.
The Open University: Complex Analysis UNIT D1 Conformal Mappings. 1. Auflage.
Malta: Gutenberg Press Limited, 2006.
Walsh, Paul: Introduction to Conformal Mapping in Aerodynamics. 2007. Als Download:
http://www.ryerson.ca/∼p3walsh/aer504/conformal.doc (Zugriff: 28.11.2013)
48

Abbildungsverzeichnis
2.1 Darstellung einer komplexen Zahl in der Gaußschen Zahlenebene . . . . . . 9
3.1 Geometrische Darstellung der Funktion w = f(z) . . . . . . . . . . . . . . 13
3.2 Punkte mit |z − z0| < δ abgebildet auf |w − w0| < ε . . . . . . . . . . . . . 14
4.1 Darstellung einer komplexen Zahl auf der Riemannschen Zahlenkugel . . . 22
4.2 Stereographische Projektion - t1 ‖ g1 . . . . . . . . . . . . . . . . . . . . . 23
4.3 Abbildung des kartesischen Koordinatensystems unter f(z) = (1 + 2i)z . . 26
4.4 z außerhalb des Einheitskreises . . . . . . . . . . . . . . . . . . . . . . . . 28
4.5 z innerhalb des Einheitskreises . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.6 z auf dem Einheitskreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.7 Abbildung von zwei inversen Punkten z1, z2 . . . . . . . . . . . . . . . . . 33
4.8 Darstellung einer Mobiustransformation durch Bewegungen der Riemann
Kugel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.9 Abbildung des Kreises K1 mit f(z) =−z + 2
z + 2nach K2 . . . . . . . . . . . 35
4.10 Abbildung der Geraden L durch f(z) =z + i
z − inach K . . . . . . . . . . . . 36
5.1 Joukowski Transformation des Kreises K = {z : |z| = 1} . . . . . . . . . . 41
5.2 Joukowski Transformation des Kreises K = {z : |z| = 1, 5} . . . . . . . . . 42
5.3 Joukowski Transformation des Kreises K = {z : |z − 0, 5| = 1, 5} . . . . . . 42
5.4 Joukowski Transformation des Kreises K = {z : |z + 0, 5| = 1, 5} . . . . . . 43
5.5 Joukowski Transformation des Kreises K = {z : |z − 0, 5i| = 1, 5} . . . . . 43
5.6 Joukowski Transformation des Kreises K = {z : |z + 0, 5i| = 1, 5} . . . . . 43
5.7 Joukowski Transformation des Kreises
K = {z : |z − (0, 35 + 0, 35i)| = 1, 4} . . . . . . . . . . . . . . . . . . . . . 44
5.8 Joukowski Transformation des Kreises
K = {z : |z − (0, 35− 0, 35i)| = 1, 4} . . . . . . . . . . . . . . . . . . . . . 44
49
5.9 Joukowski Transformation des Kreises
K = {z : |z − (−0, 35− 0, 35i)| = 1, 4} . . . . . . . . . . . . . . . . . . . . 45
5.10 Joukowski Tragflachenprofil durch Transformation des Kreises
K = {z : |z − (−0, 12 + 0, 15i)| = 1, 15} . . . . . . . . . . . . . . . . . . . . 45
50

Selbststandigkeitserklarung
Ich, Thomas Albert Maierhofer, erklare, dass ich diese vorwissenschaftliche Arbeit
eigenstandig angefertigt und nur die im Literaturverzeichnis angefuhrten Quellen und
Hilfsmittel benutzt habe.
Langenwang, 19. Februar 2015 .......................................................................
Thomas Albert Maierhofer
51
Top Related