







Languages
Pages
Legal


制御系の設計
現実には不可能!!制御偏差:e(t) = r(t) ! y(t)
制御の目的:e(t) ! 0, t " 0
か,これを出来るだけ小さくする
e(!) = limt!"
e(t) = 0
閉ループが安定であれば...
= lims!0
sE(s)
目標値から誤差までの伝達関数:E(s) =1
1 + G(s)C(s)R(s)
制御偏差
€
−R(s) E(s)
C(s) G(s)Y (s)+

t
(分母多項式がsでくくれる)
「1型の制御系」と呼ぶ
:定常位置偏差,オフセットep(!)
ep(!) = limt!"
e(t) = lims!0
sE(s)
=P0
1 + lims!0 G(s)C(s)
= lims!0
s1
1 + G(s)C(s)
P0
s
:位置偏差定数Kp = lims!0
G(s)C(s)
G(s)C(s) =(!)
s(•) Kp = !
ep(!) = 0
ステップ状目標値信号の場合:r(t) = P0, R(s) =P0
s

:速度偏差定数t
(分母多項式がs2でくくれる)
「2型の制御系」と呼ぶ
:定常速度偏差ev(!)
ev(!) = limt!"
e(t) = lims!0
sE(s)
=r0
1 + lims→0
sG(s)C(s)
= lims!0
s1
1 + G(s)C(s)
r0
s2
Kv = lims!0
sG(s)C(s)
G(s)C(s) =(!)
s2(•)
ランプ状目標値信号の場合:r(t) = r0t, R(s) =r0
s2
Kv = !
ev(!) = 0

例題
€
−R(s) E(s)
C(s) G(s)Y (s)
D(s)
H(s)
Y (s) =G(s)C(s)
1 + G(s)C(s)H(s)R(s) +
G(s)
1 + G(s)C(s)H(s)D(s)
W (s) Yd(s)

Y (s) =G(s)C(s)
1 + G(s)C(s)H(s)R(s) +
G(s)
1 + G(s)C(s)H(s)D(s)
W (s) Yd(s)
ステップ状の外乱について:D(s) =d0
s
yd(!) = lims!0
sYd(s) = lims!0
sG(s)
1 + G(s)C(s)H(s)
d0
s
D(s) =d0
lims!0
!
1
G(s)+ C(s)H(s)
"
1
G(s)+ C(s)H(s)が 1型のとき yd(!) = 0

例題:タンクのレベル制御u(t)
y(t)
v(t)A
k
Ady(t)
dt= u(t) ! v(t)
v(t) !
v0
s: ステップ状外乱
R(s) : ステップ状信号C(s)をどのように設計すればよいか?
:一定に保つ
1
AsC(s)
R(s)+ E(s) U(s)
V (s)
Y (s)!
!

1.システムを安定化する!システムの極は0だから安定限界
しかし...
u(t) = Ke(t)とする
W (s) =K/As
1 + K/As=
K
As + K
1
AsC(s)
R(s)+ E(s) U(s)
V (s)
Y (s)!
!
Kを適切に選べば から までは安定化できるR(s) Y (s)

目標値信号に対して...
1型の制御系となる
ステップ状外乱に対して...
どうすればよいのか...
1型とはならない!!
G(s)C(s) =K
As
1
G(s)+ C(s)H(s) = As + K
y(!) = r "
v0
Kとなる

目標値信号に対して…
ステップ状外乱にして...
2型の制御系となる.
ステップ状目標値に対する定常偏差は0となる.
1型となる!!
としてみる...C(s) = KP +KI
s
W (s) =(KP s + KI)/As2
1 +1
As
KP s + KI
s
G(s)C(s) =1
As
(
KP s + KI
s
)
1
G(s)+ C(s)H(s) = As +
KP s + KI
s
yd(∞) = 0
を適切に選べば から は安定となる.
R(s)
Y (s)
KP , KI
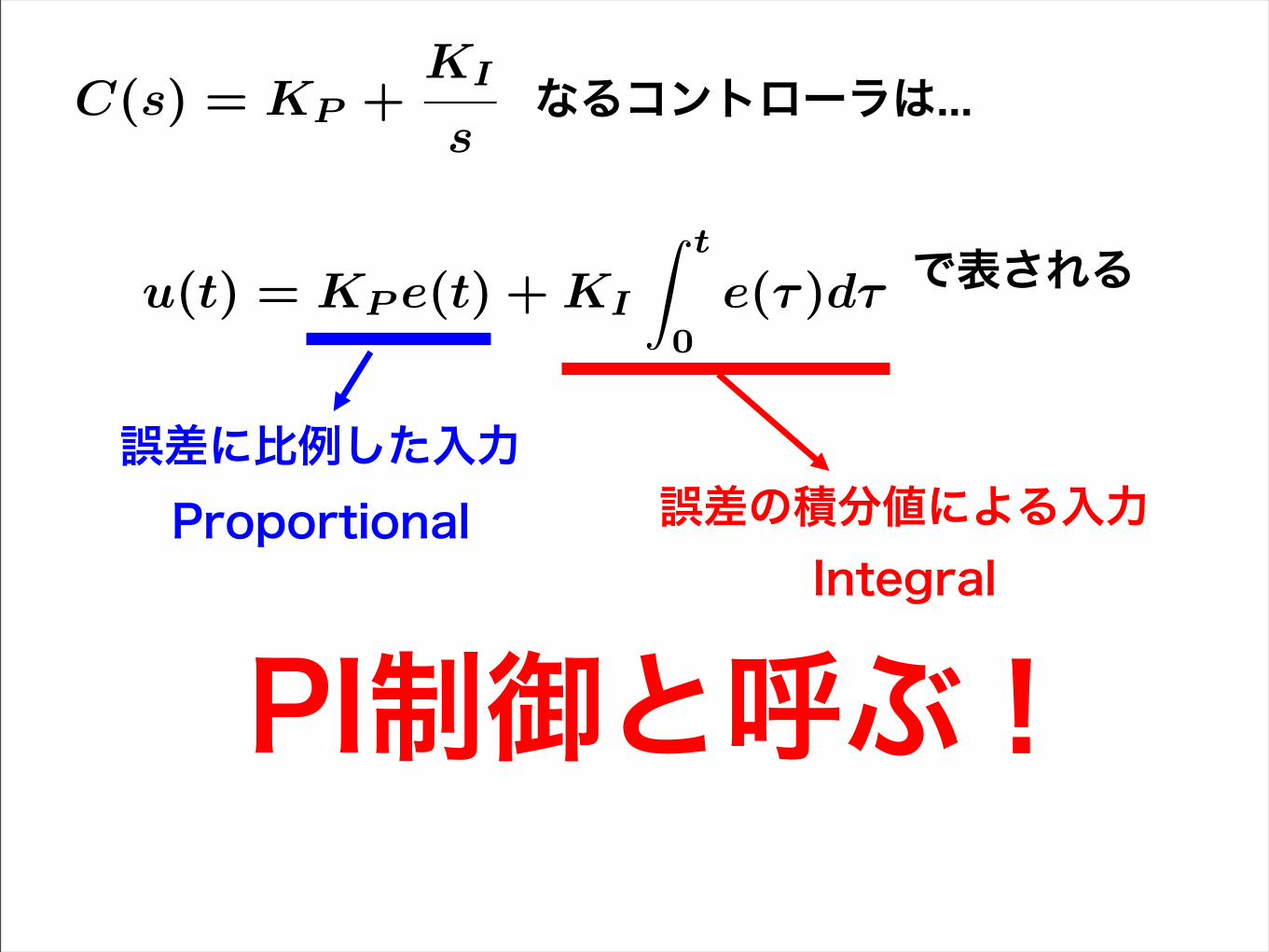
PI制御と呼ぶ!
誤差に比例した入力誤差の積分値による入力Proportional
Integral
で表されるu(t) = KP e(t) + KI
! t
0
e(! )d!
なるコントローラは...C(s) = KP +KI
s

制御系の設計:状態フィードバックを用いたもの制御対象:状態空間表現:
d
dt
!
x1(t)
x2(t)
"
=
!
0 1
0 −1
" !
x1(t)
x2(t)
"
+
!
0
2
"
u(t)
y(t) =!
1 0"
#
x1(t)
x2(t)
$
伝達関数表現:
G(s) =2
s(s + 1)
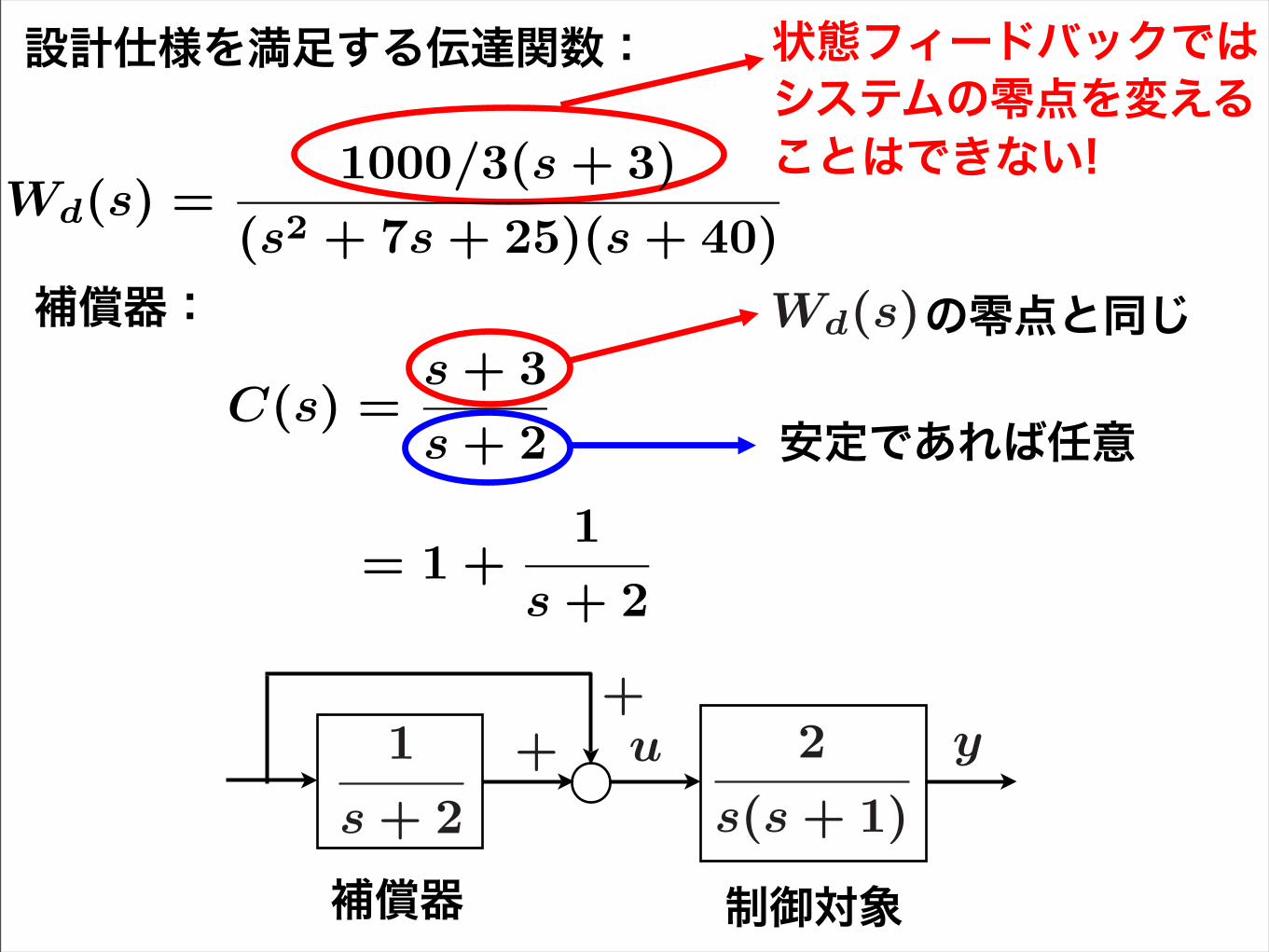
設計仕様を満足する伝達関数: 状態フィードバックではシステムの零点を変えることはできない!
補償器:
安定であれば任意
Wd(s) =1000/3(s + 3)
(s2 + 7s + 25)(s + 40)
C(s) =s + 3
s + 2
= 1 +1
s + 2
の零点と同じWd(s)
2
s(s + 1)
制御対象
u y
補償器:補償器:
1
s + 2
補償器
+
+

補償器の状態空間表現:dx3(t)
dt= !2x3(t) + v(t), u(t) = x3(t) + v(t)
v(t)から y(t)までの状態空間表現d
dt
!
"
#
x1(t)
x2(t)
x3(t)
$
%
&=
!
"
#
0 1 0
0 !1 2
0 0 !2
$
%
&
!
"
#
x1(t)
x2(t)
x3(t)
$
%
&+
!
"
#
0
2
1
$
%
&v(t)
y(t) =!
1 0 0"
#
$
%
x1(t)
x2(t)
x3(t)
&
'
(
1
s + 2
+
+
x3v u

状態フィードバックで安定化(極配置)する.v(t) = Kr ! k1x1(t) ! k2x2(t) ! k3x3(t)
2
s(s + 1)
u y1
s + 2
補償器
+
+
x3
x1 x2
k2k1k3
vK
+
!
r
! ! !+

閉ループ系:
閉ループ伝達関数:
係数比較より...
d
dt
x1(t)
x2(t)
x3(t)
=
0 1 0
!2k1 !1 ! 2k2 2 ! 2k3
!k1 !k2 !2 ! k3
x1(t)
x2(t)
x3(t)
+
0
2K
K
r
Wd(s) =2K(s + 3)
s3 + (3 + 2k2 + k3)s2 + (2 + 2k1 + 6k2 + k3)s + 6k1
K =500
3, k1 =
500
3, k2 = !
223
12, k3 =
487
6

設計仕様を満たす r(t)から y(t)までの伝達関数Wd(s) =
1000/3(s + 3)
(s2 + 7s + 25)(s + 40)
2
s(s + 1)
u y1
s + 2
補償器
+
+
x3
x1 x2
k2k1k3
vK
+
!
r
! ! !+
新たな制御対象
オブザーバ
Top Related