






Languages
Pages
Legal

Support du sujet: Bride hydraulique. Plusieurs parties :
Présentation.
Partie automatique. 6 points
Partie statique. 6 points
Partie construction & analyse. 3 points
Partie dessin. 5 points
Présentation :
Nous allons étudier pendant ce partiel un système de bridage utilisé sur fraiseuse à commande
numérique dans un atelier de fabrication. Cette bride hydraulique permet de maintenir en position une
pièce à usiner. Un vérin à double effet, alimenté hydrauliquement, fait partie de la bride, il est sur le coté
gauche du système sur la coupe A-A du dessin d’ensemble.
L’alimentation en huile peut se faire par les orifices H ou G du plan d’ensemble.
Partie construction & analyse : répondre sur documents réponse analyse.
Partie statique: répondre sur documents réponse statique.
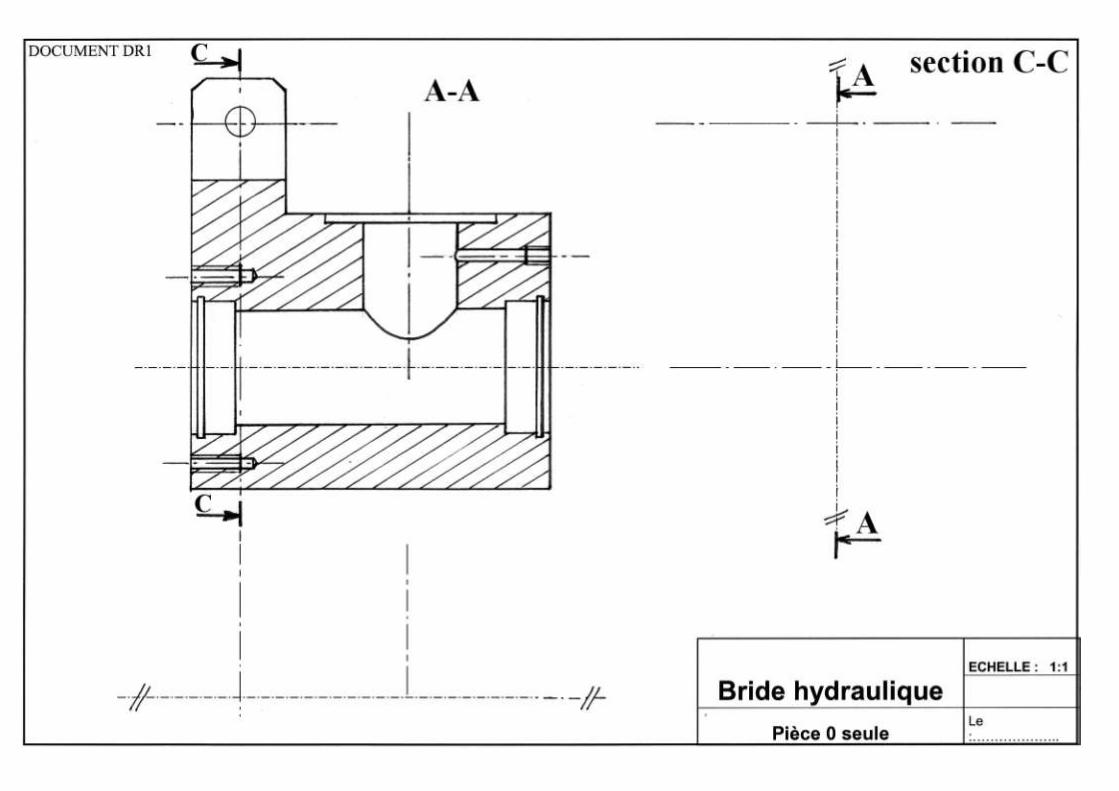
Partie dessin:
Dessiner sur le document réponse DR1 la pièce 0 seule, sans les pointillés :
½ vue extérieure gauche + ½ section C-C
½ Vue extérieure de dessus
Vue de face en coupe A-A est déjà dessinée.
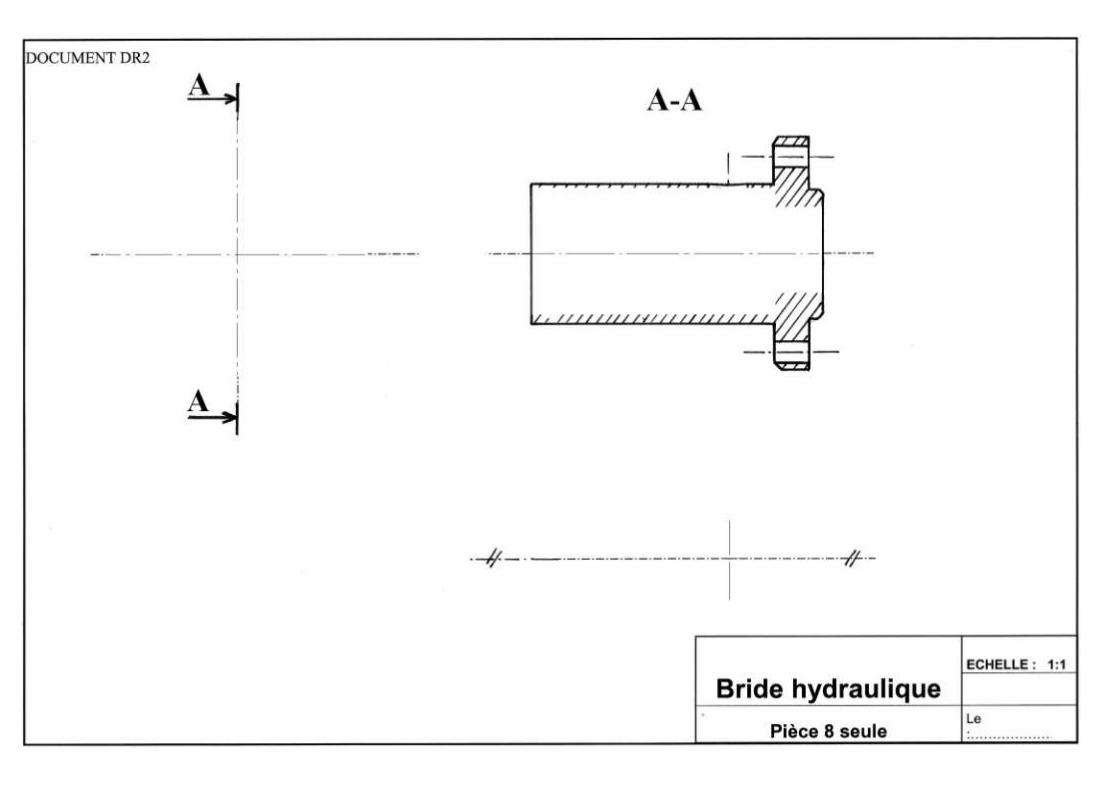
Compléter sur le document réponse DR2 la pièce 8 seule sans les pointillés :
Vue de face en coupe A-A (à compléter)
Vue extérieure droite
½ Vue extérieure de dessus
Partie automatique:
1- Etude de l’aiguillage des types de pièces.
Six types de pièce peuvent être usinés dans l’atelier. Pour identifier les six types de pièces on
utilise le code à barres « 2 parmi 5 ».
Le code « 2 parmi 5 » utilise 5 bits (2 sont à l’état logique 1, et 3 sont à l’état logique 0) pour
coder un chiffre décimal.
L’état logique 1 est représenté par une barre large et l’état logique 0 est représenté par une
barre étroite.
Chaque chiffre de 0 à 9 est codé sur quatre bits (a, b, c, d) ; le code est complété par un bit de
contrôle e.
Un calculateur traduit chaque chiffre de ce code à barres « 2 parmi 5 » en un nombre binaire
codé sur les quatre bits S3, S2, S1, S0.
On vous donne ci-dessous la table de vérité des sorties Si en fonction des entrées a, b, c, d et
e.
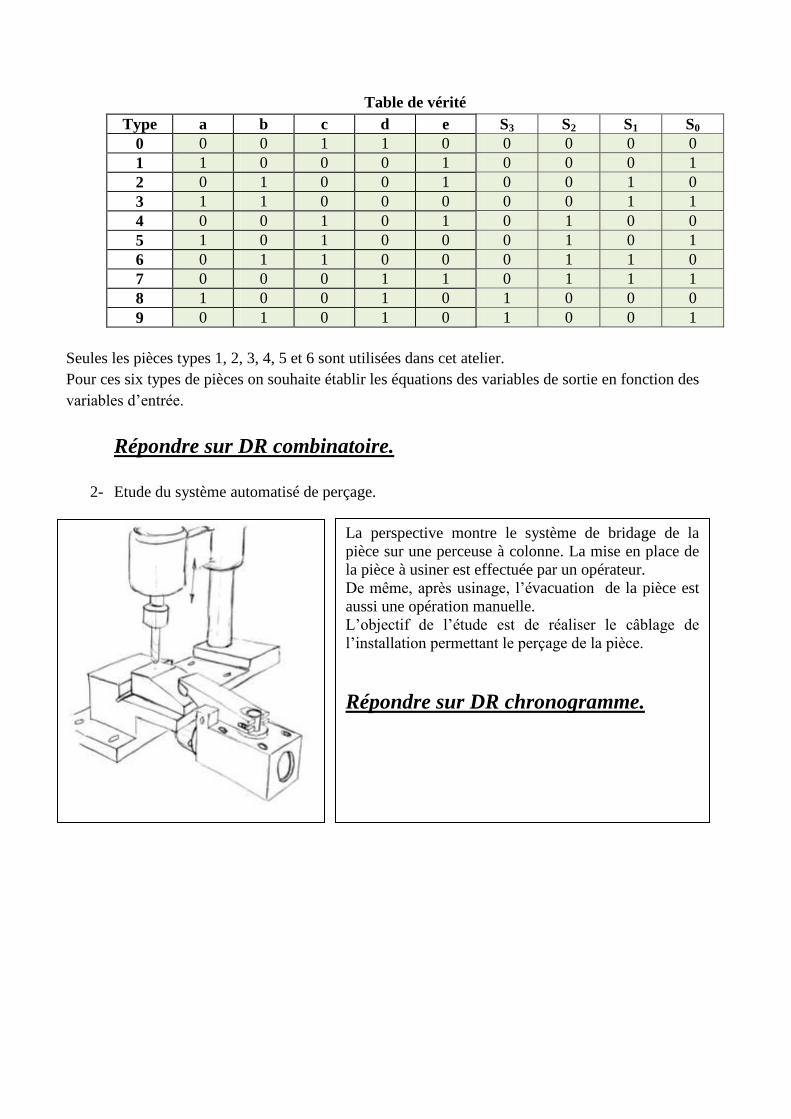
Table de vérité
Type a b c d e S3 S2 S1 S0
0 0 0 1 1 0 0 0 0 0
1 1 0 0 0 1 0 0 0 1
2 0 1 0 0 1 0 0 1 0
3 1 1 0 0 0 0 0 1 1
4 0 0 1 0 1 0 1 0 0
5 1 0 1 0 0 0 1 0 1
6 0 1 1 0 0 0 1 1 0
7 0 0 0 1 1 0 1 1 1
8 1 0 0 1 0 1 0 0 0
9 0 1 0 1 0 1 0 0 1
Seules les pièces types 1, 2, 3, 4, 5 et 6 sont utilisées dans cet atelier.
Pour ces six types de pièces on souhaite établir les équations des variables de sortie en fonction des
variables d’entrée.
Répondre sur DR combinatoire.
2- Etude du système automatisé de perçage.
La perspective montre le système de bridage de la
pièce sur une perceuse à colonne. La mise en place de
la pièce à usiner est effectuée par un opérateur.
De même, après usinage, l’évacuation de la pièce est
aussi une opération manuelle.
L’objectif de l’étude est de réaliser le câblage de
l’installation permettant le perçage de la pièce.
Répondre sur DR chronogramme.
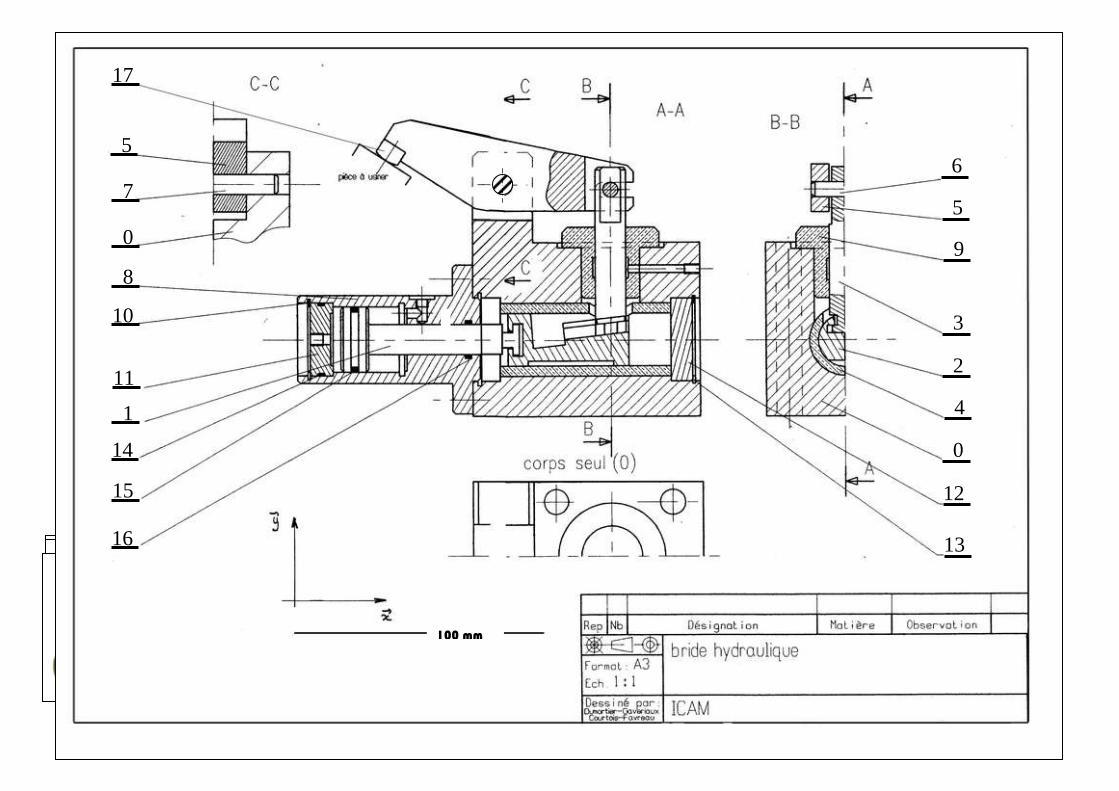
100 mm
17
7
5
0
8
6
10
16
15
14
1
11
5
9
3
2
4
0
12
13
Partie construction et analyse :
Les pièces 9 et 4 n’ont pas les mêmes hachures. A quoi correspondent-elles ?
On remarque que les « chambrages » dans 0 recevant 12 et 8 sont identiques ;
pourquoi ?
Retrouver la fonction et la désignation normalisée des joints 15 et 16.
Donner le nom usuel et l’utilisation de la pièce 13.
Recenser les matières d’œuvre entrante et sortante, tracer le diagramme A-0 de la
bride hydraulique étudiée.
Indiquer ici le chapitre et
la page du GSTI où on
retrouve cette notion
SADT.

Déterminer les sous-ensembles cinématiquement équivalents (ou classes
d’équivalence) à partir du dessin d’ensemble de la bride ; colorier ces S.E.C.E. sur le
dessin ci-dessous:
Lister les pièces constituant les différents SECE :
S0 : { 0,
S1 : { 1,
S2 : { 2,
S3 : { 3,
S4 : { 5,
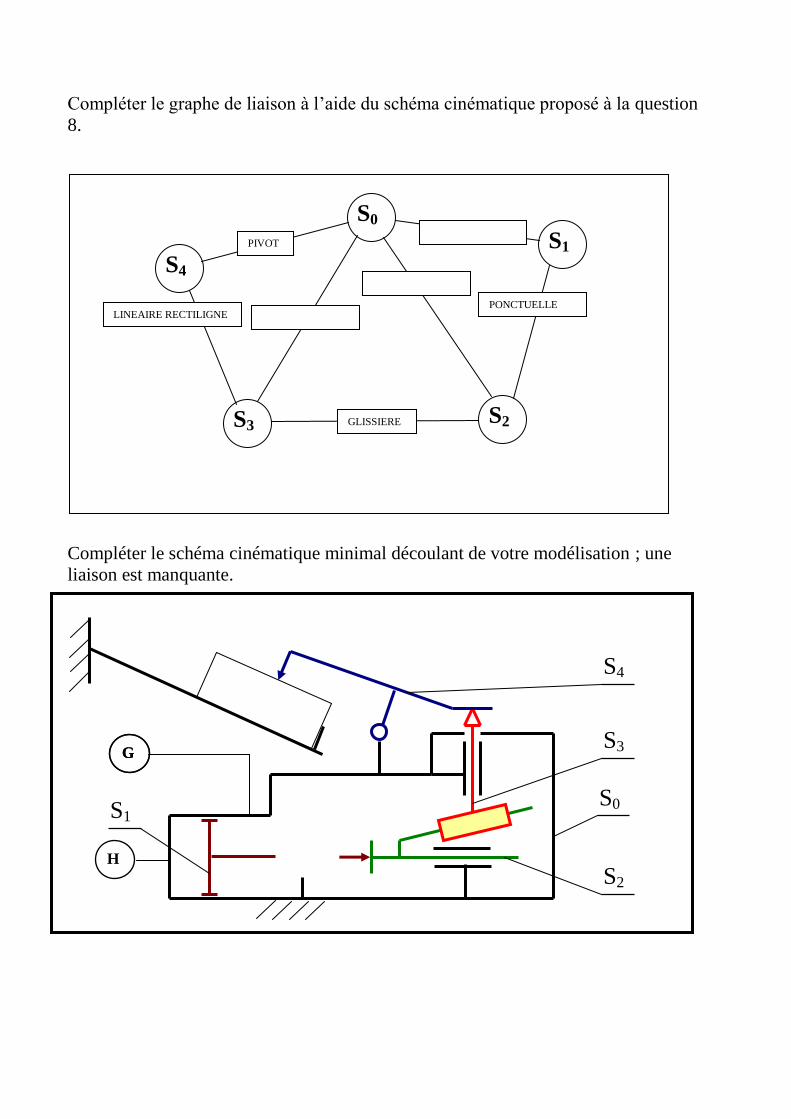
Compléter le graphe de liaison à l’aide du schéma cinématique proposé à la question
8.
Compléter le schéma cinématique minimal découlant de votre modélisation ; une
liaison est manquante.
S0
S3
S1
S2
S4
PONCTUELLE
PIVOT
GLISSIERE
LINEAIRE RECTILIGNE
S0 S1
S2
S3
S4
G G
H
Partie statique:
On se propose de calculer la force de serrage par deux méthodes (analytique et
graphique). Connaissant la pression hydraulique dans le vérin (20.105Pa) nous allons
isoler 2, puis 5+17 en tenant compte d’une force de serrage utile. On considèrera les
liaisons parfaites, la liaison S2 / S3 ponctuelle.
1 - A partir du plan d’ensemble , donner le diamètre intérieur du vérin en mm.
2 – Calculer la force développée par le vérin lors du desserrage de la pièce.
3 – Calculer la force développée par le vérin lors du serrage de la pièce.
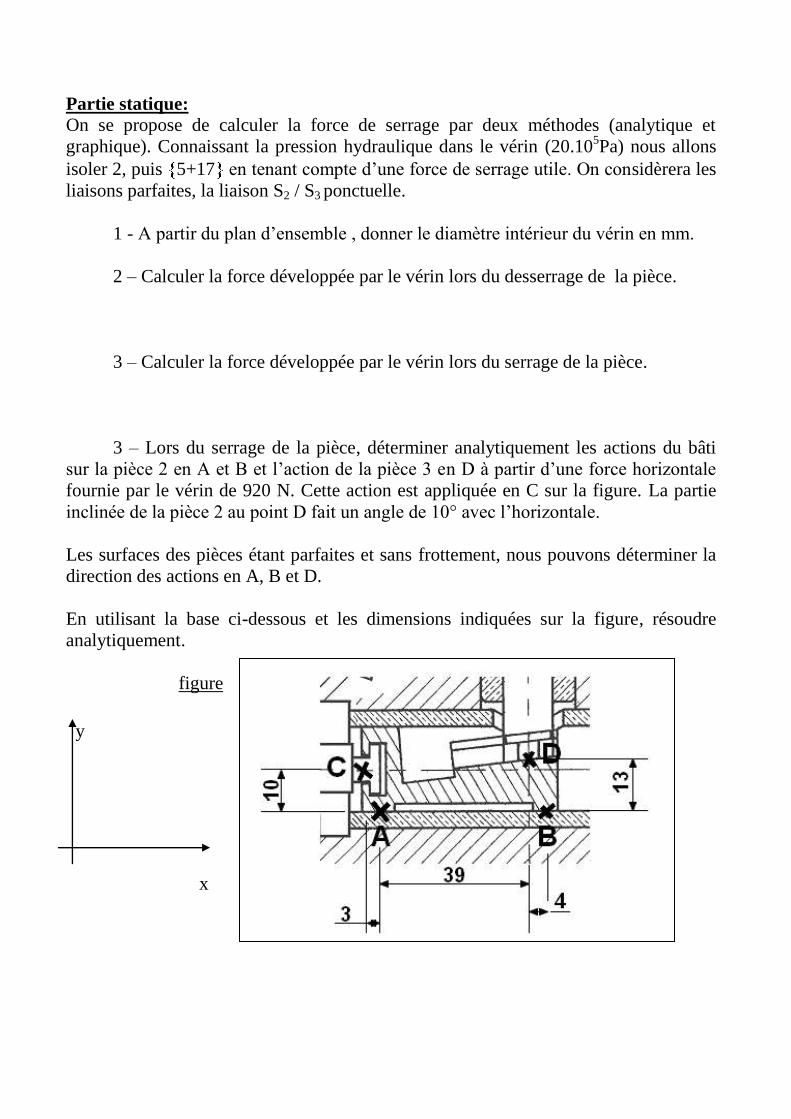
3 – Lors du serrage de la pièce, déterminer analytiquement les actions du bâti
sur la pièce 2 en A et B et l’action de la pièce 3 en D à partir d’une force horizontale
fournie par le vérin de 920 N. Cette action est appliquée en C sur la figure. La partie
inclinée de la pièce 2 au point D fait un angle de 10° avec l’horizontale.
Les surfaces des pièces étant parfaites et sans frottement, nous pouvons déterminer la
direction des actions en A, B et D.
En utilisant la base ci-dessous et les dimensions indiquées sur la figure, résoudre
analytiquement.
figure
y
x
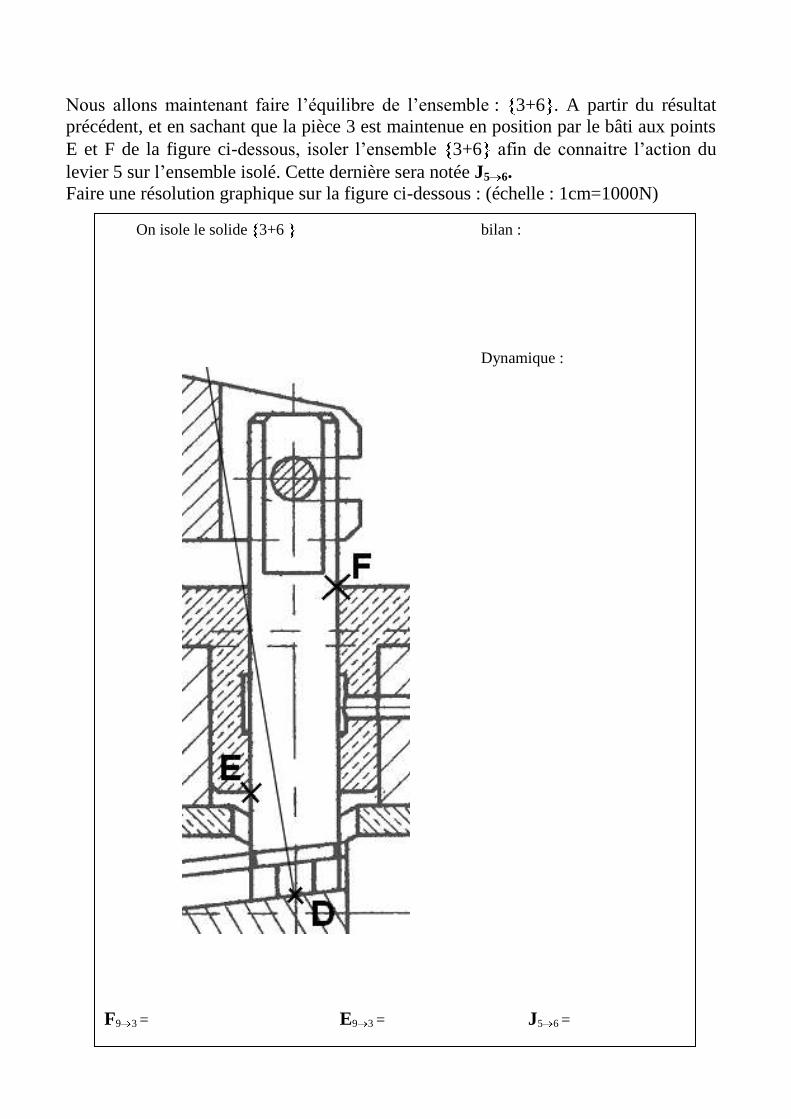
Nous allons maintenant faire l’équilibre de l’ensemble : 3+6 . A partir du résultat
précédent, et en sachant que la pièce 3 est maintenue en position par le bâti aux points
E et F de la figure ci-dessous, isoler l’ensemble 3+6 afin de connaitre l’action du
levier 5 sur l’ensemble isolé. Cette dernière sera notée J5 6.
Faire une résolution graphique sur la figure ci-dessous : (échelle : 1cm=1000N)
On isole le solide 3+6 bilan :
Dynamique :
F9 3 = E9 3 = J5 6 =
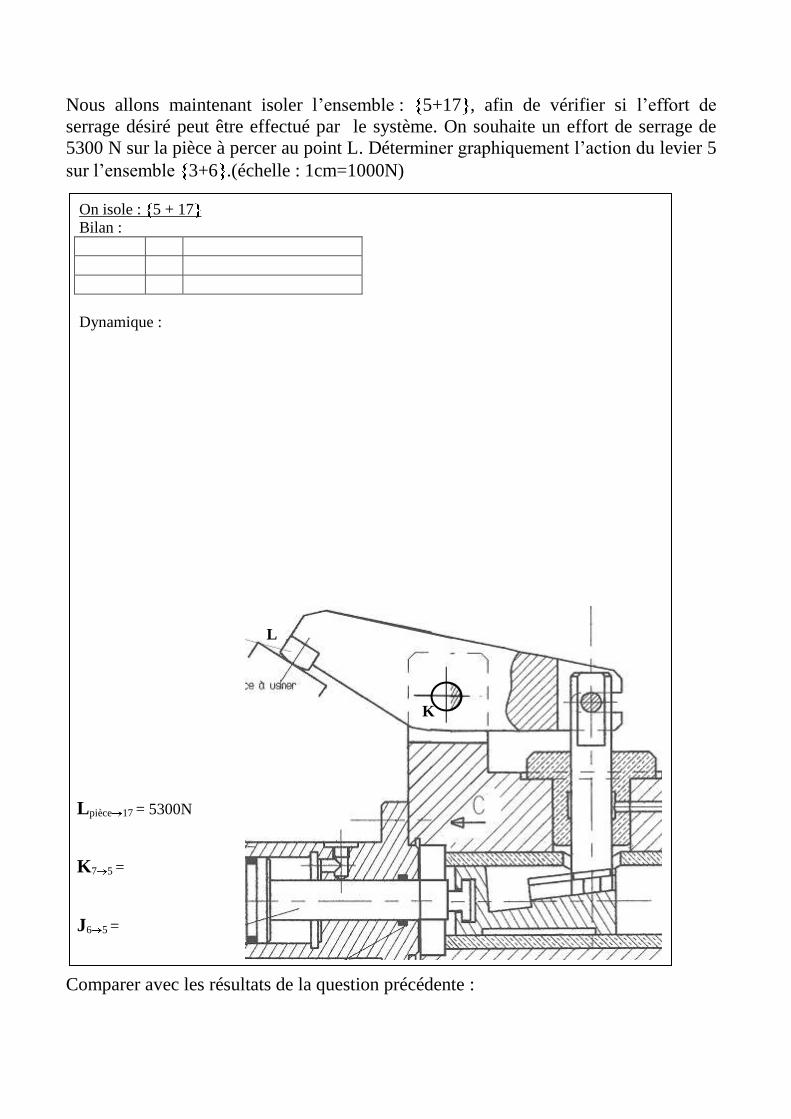
Nous allons maintenant isoler l’ensemble : 5+17 , afin de vérifier si l’effort de
serrage désiré peut être effectué par le système. On souhaite un effort de serrage de
5300 N sur la pièce à percer au point L. Déterminer graphiquement l’action du levier 5
sur l’ensemble 3+6 .(échelle : 1cm=1000N)
Comparer avec les résultats de la question précédente :
On isole : 5 + 17
Bilan :
Dynamique :
K
L
Lpièce 17 = 5300N
K7 5 =
J6 5 =
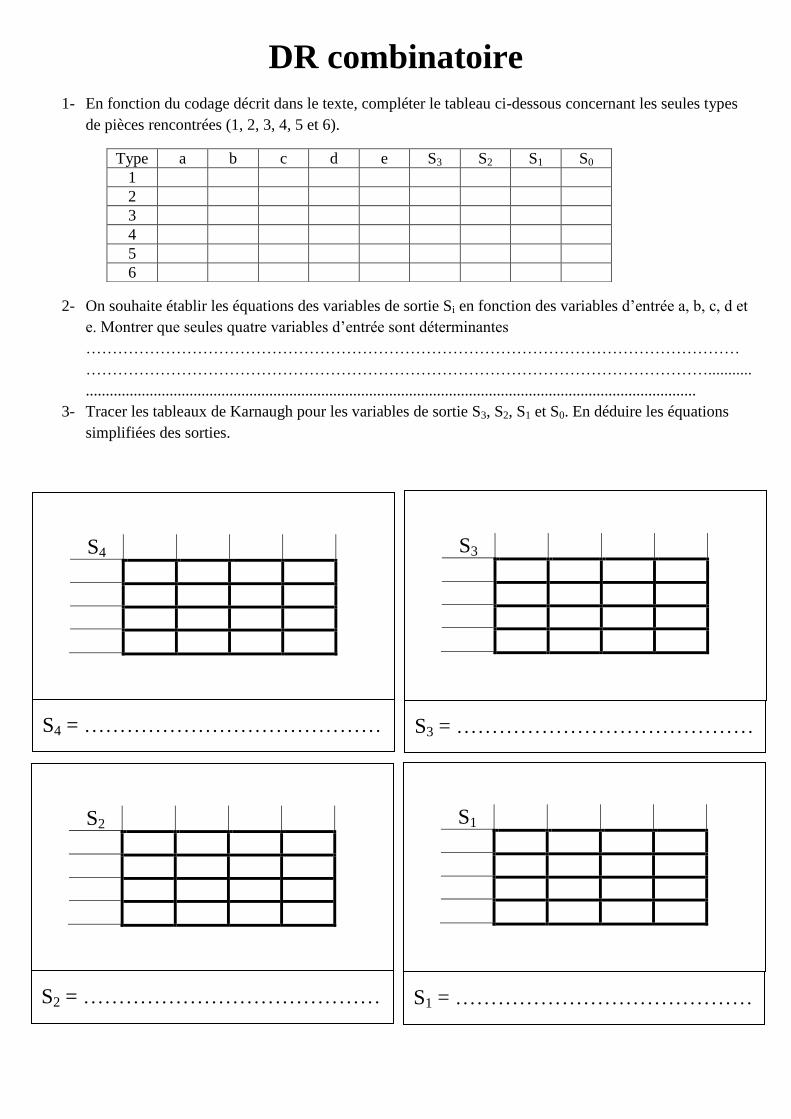
DR combinatoire
1- En fonction du codage décrit dans le texte, compléter le tableau ci-dessous concernant les seules types
de pièces rencontrées (1, 2, 3, 4, 5 et 6).
2- On souhaite établir les équations des variables de sortie Si en fonction des variables d’entrée a, b, c, d et
e. Montrer que seules quatre variables d’entrée sont déterminantes
……………………………………………………………………………………………………………
………………………………………………………………………………………………………...........
.........................................................................................................................................................
3- Tracer les tableaux de Karnaugh pour les variables de sortie S3, S2, S1 et S0. En déduire les équations
simplifiées des sorties.
Type a b c d e S3 S2 S1 S0
1
2
3
4
5
6
S3
S3 = ……………………………………
S4
S4 = ……………………………………
S1
S1 = ……………………………………
S2
S2 = ……………………………………
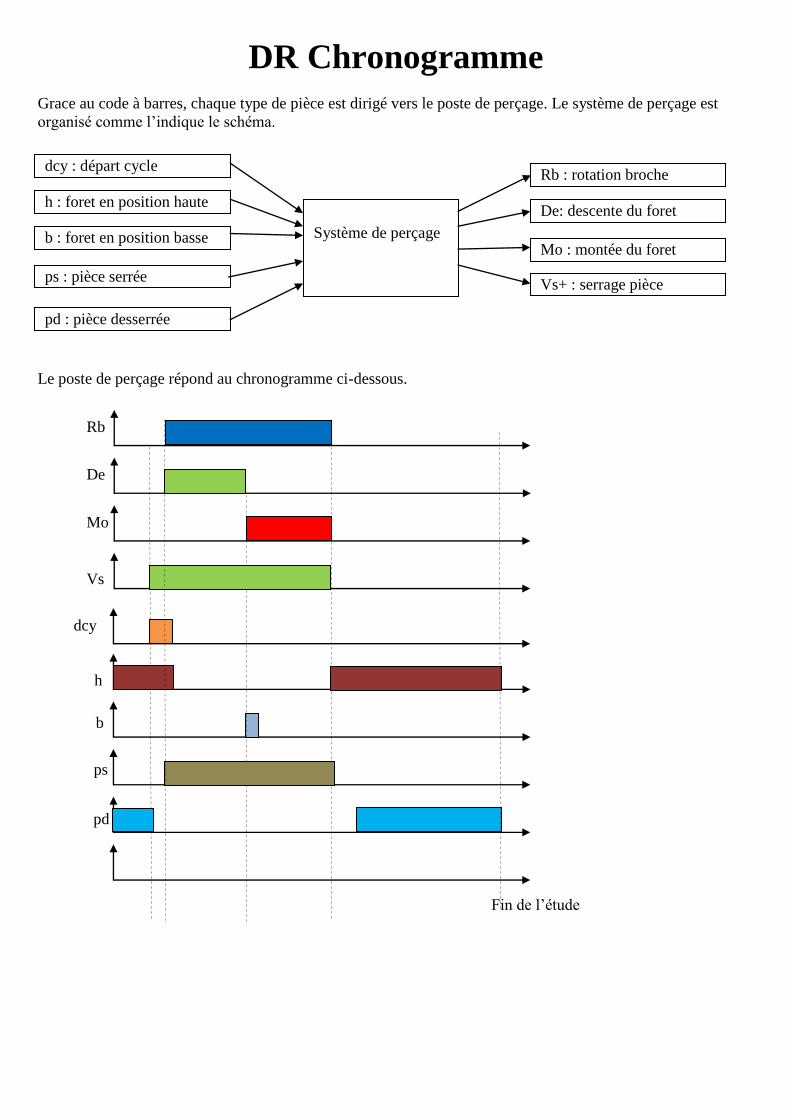
DR Chronogramme
Grace au code à barres, chaque type de pièce est dirigé vers le poste de perçage. Le système de perçage est
organisé comme l’indique le schéma.
Le poste de perçage répond au chronogramme ci-dessous.
Rb
De
Mo
dcy
h
ps
b
pd
Vs
+
Fin de l’étude
Système de perçage
dcy : départ cycle
h : foret en position haute
b : foret en position basse
ps : pièce serrée
pd : pièce desserrée
Rb : rotation broche
De: descente du foret
Mo : montée du foret
Vs+ : serrage pièce
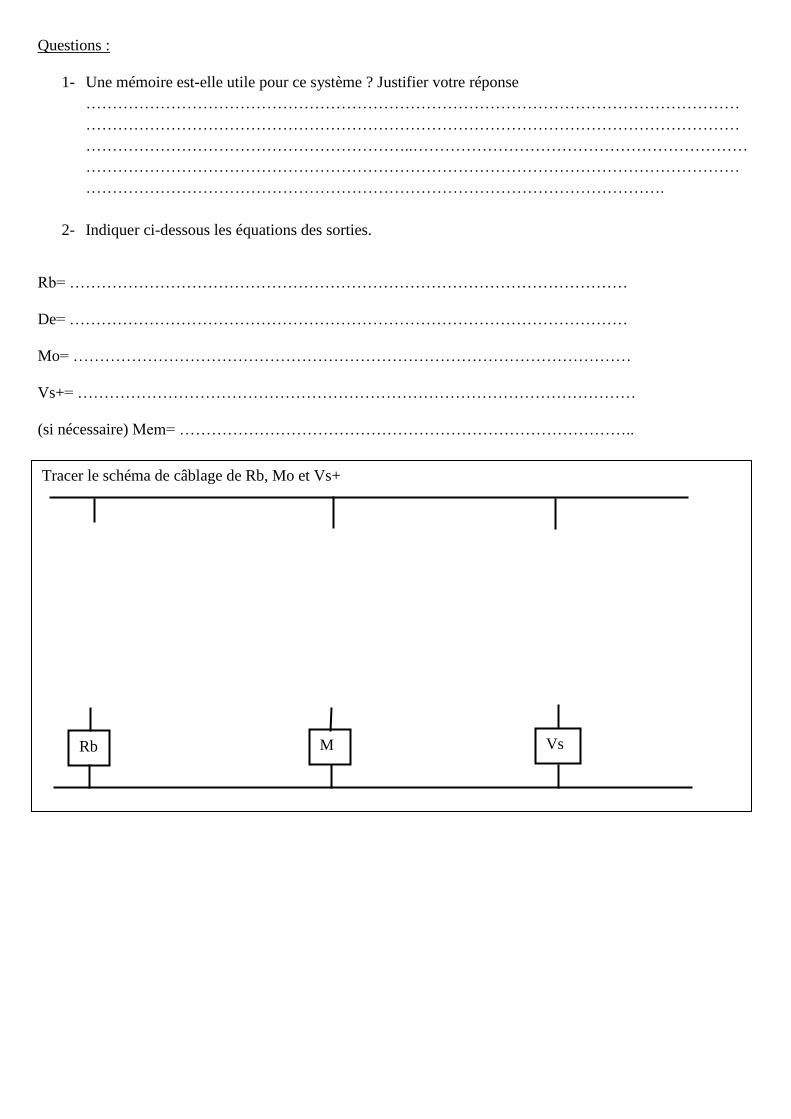
Questions :
1- Une mémoire est-elle utile pour ce système ? Justifier votre réponse
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………..………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………….
2- Indiquer ci-dessous les équations des sorties.
Rb= ……………………………………………………………………………………………
De= ……………………………………………………………………………………………
Mo= ……………………………………………………………………………………………
Vs+= ……………………………………………………………………………………………
(si nécessaire) Mem= …………………………………………………………………………..
Tracer le schéma de câblage de Rb, Mo et Vs+
Rb Vs
+ M
o
Top Related