






Languages
Pages
Legal

Studienrichtung AMR
Studienrichtungen
• Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik
• Electric Power EngineeringElektroenergietechnik
• Geräte- und MikrotechnikKommunikationstechnik
• InformationstechnikInformationselektronik
• MikroelektronikMikro-/Opto-/Nanoelektronik
Folie 2
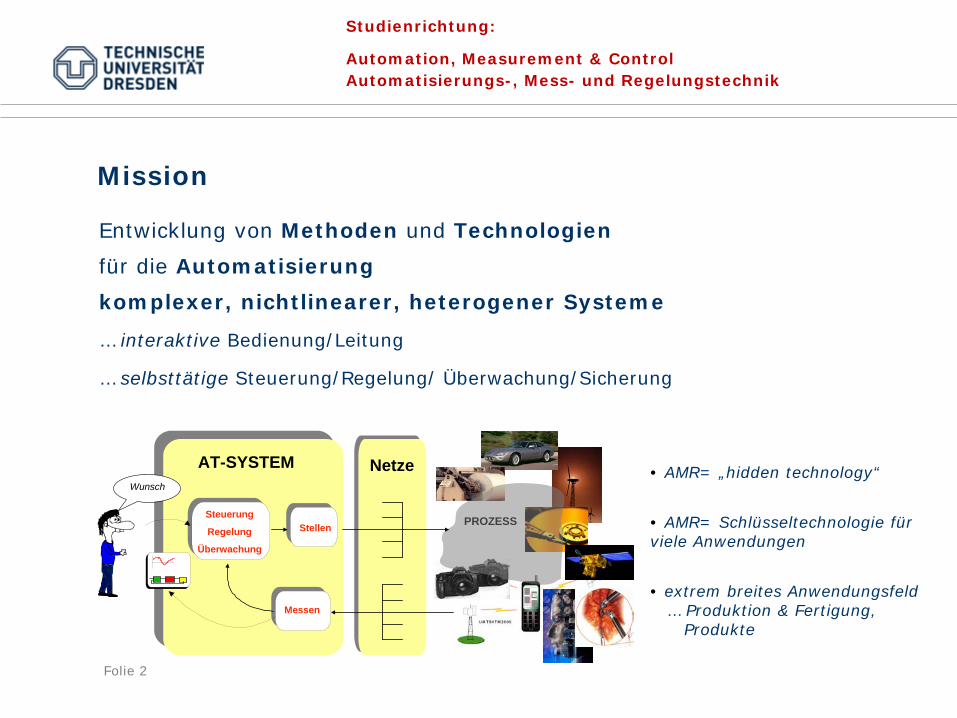
Mission
Entwicklung von Methoden und Technologienfür die Automatisierung komplexer, nichtlinearer, heterogener Systeme
… interaktive Bedienung/Leitung
… selbsttätige Steuerung/Regelung/ Überwachung/Sicherung
• AMR= „hidden technology“
• extrem breites Anwendungsfeld… Produktion & Fertigung,
Produkte
• AMR= Schlüsseltechnologie für viele Anwendungen
PROZESS
Messen
Steuerung
RegelungÜberwachung
AT-SYSTEM
Stellen
Wunsch
Netze
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik
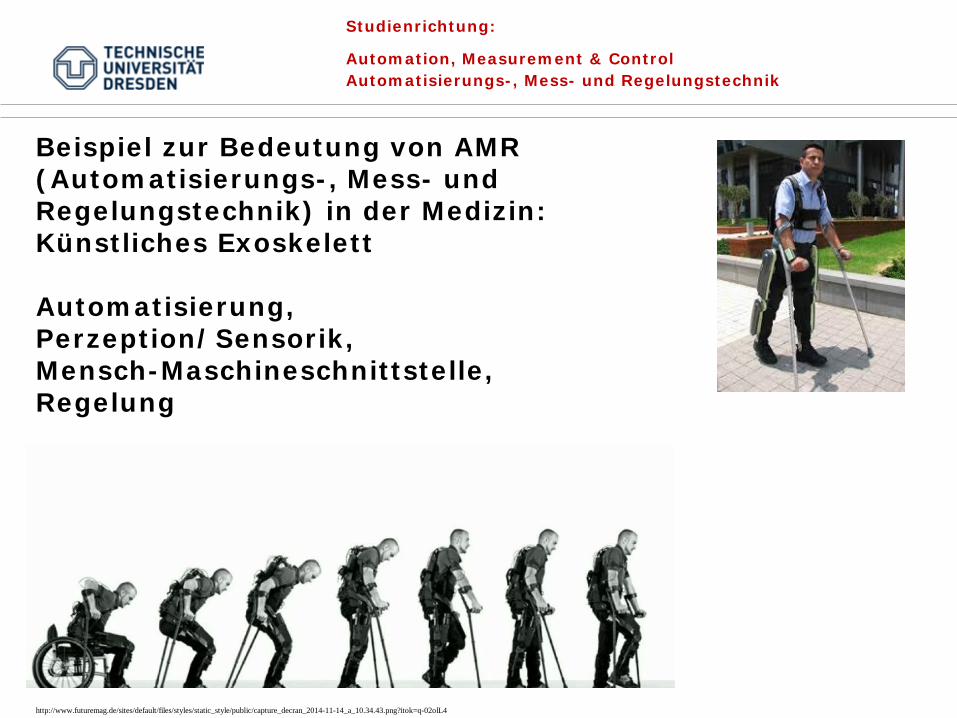
Beispiel zur Bedeutung von AMR (Automatisierungs-, Mess- und Regelungstechnik) in der Medizin:Künstliches Exoskelett
Automatisierung, Perzeption/Sensorik, Mensch-Maschineschnittstelle, Regelung
http://www.futuremag.de/sites/default/files/styles/static_style/public/capture_decran_2014-11-14_a_10.34.43.png?itok=q-02olL4
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik

Anfordungen an AMR-Ingenieure: Interdisziplinäres Projekt- und Lösungsgeschäft
• Aufgaben: Charakterisierung, Modellierung, Planung, Realisierung und Anwendung von AMR für komplexe technische Systeme
• Beispiel Schweißroboter – Automatisierungstechnik: Bahnplanung,
Trajektorienerzeugung, Modellbildung, Datenfusion– Mess- und Sensorsystemtechnik: Smarte adaptive
Sensorsysteme, Echtzeitdatenverarbeitung– Regelungs- und Steuerungstheorie: Regelung
nichtlinearer System, Überwachung– Prozessleittechnik: Informationstechnische
Modellierung und Einbettung in die Digitale Anlage,Mensch-Maschine-Kommunikation
Studienrichtung AMR Folie 4
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik
Quelle: KUKA Robotor GmbH + isravision.com
Folie 5
Herausforderungen 2025
Beiträge von AMR zur Lösung gesellschaftlicher Herausforderungen
• Globalisierung verkürzte Produktzyklen, flexible Produktion,
Individualisierung
• Ressourceneffizienz Erhöhung der Effizienz von Kraftwerken
und chemischen Anlagen
• Ökologie Messung und Vermeidung von Schadstoffen und
Lärm, Sicherung der Luft- und Wasserqualität
• Verkehr Mobilität, Sicherheit (Reduktion Verkehrstote,…)
• Demographischer Wandel Steigerung Lebensqualität,
Gesundheit, Roboter im Haushalt
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik

Hauptseminar AMR – WS19/205. Semester, 2 SWS, 4 LP, Team- und Projektarbeit
Autonomes Fahren - Einparkassistent
ET - Studienrichtung AMRAutomatisierungs-, Mess- und Regelungstechnik
LEGO Mindstorms NXT Roboter Parcour mit Parklücken
7‘‘ Android 4 Tablet
Ziel:• Straßenverlauf folgen• passende Parklücken finden• Parkvorgang autonom durchführen
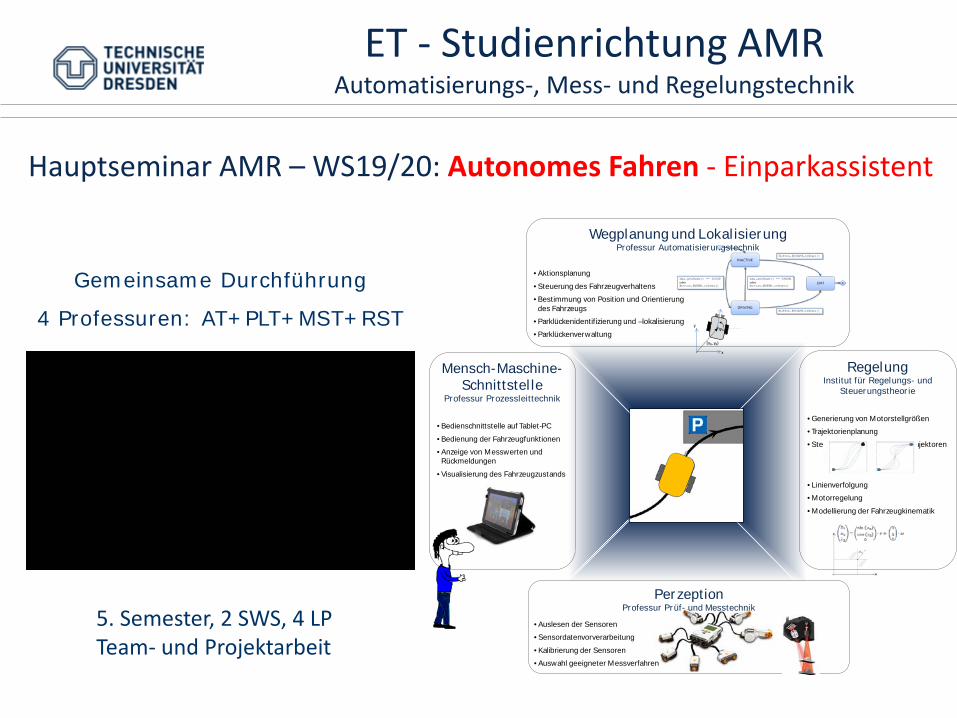
Gemeinsame Durchführung
4 Professuren: AT+PLT+MST+RST
RegelungInstitut für Regelungs- und
Steuerungstheor ie
• Generierung von Motorstellgrößen• Trajektorienplanung• Steuerung/Regelung entlang Trajektoren
• Linienverfolgung• Motorregelung
• Modellierung der Fahrzeugkinematik
Wegplanung und Lokal isierung Professur Automatisierungstechnik
• Aktionsplanung
• Steuerung des Fahrzeugverhaltens• Bestimmung von Position und Orientierung
des Fahrzeugs• Parklückenidentifizierung und –lokalisierung• Parklückenverwaltung
x
y
(xR, yR)
ϕR
Mensch-Maschine-Schnittstel le
Professur Prozessleittechnik
• Bedienschnittstelle auf Tablet-PC
• Bedienung der Fahrzeugfunktionen• Anzeige von Messwerten und
Rückmeldungen
• Visualisierung des Fahrzeugzustands
PerzeptionProfessur Prüf- und Messtechnik
• Auslesen der Sensoren• Sensordatenvorverarbeitung
• Kalibrierung der Sensoren• Auswahl geeigneter Messverfahren
ET - Studienrichtung AMRAutomatisierungs-, Mess- und Regelungstechnik
Hauptseminar AMR – WS19/20: Autonomes Fahren - Einparkassistent
5. Semester, 2 SWS, 4 LPTeam- und Projektarbeit

Organisation & Personen:
Studienrichtung AMR Folie 10
Regelungs- und Steuerungstheorie
RSTRöbenack
Automatisierungs-technik
ATJanschek
Prozessleit-technik
PLTUrbas
Mess- und Sensorsystemtechnik
MSTCzarske
AMR (c)
Studienrichtung AMR Folie 17
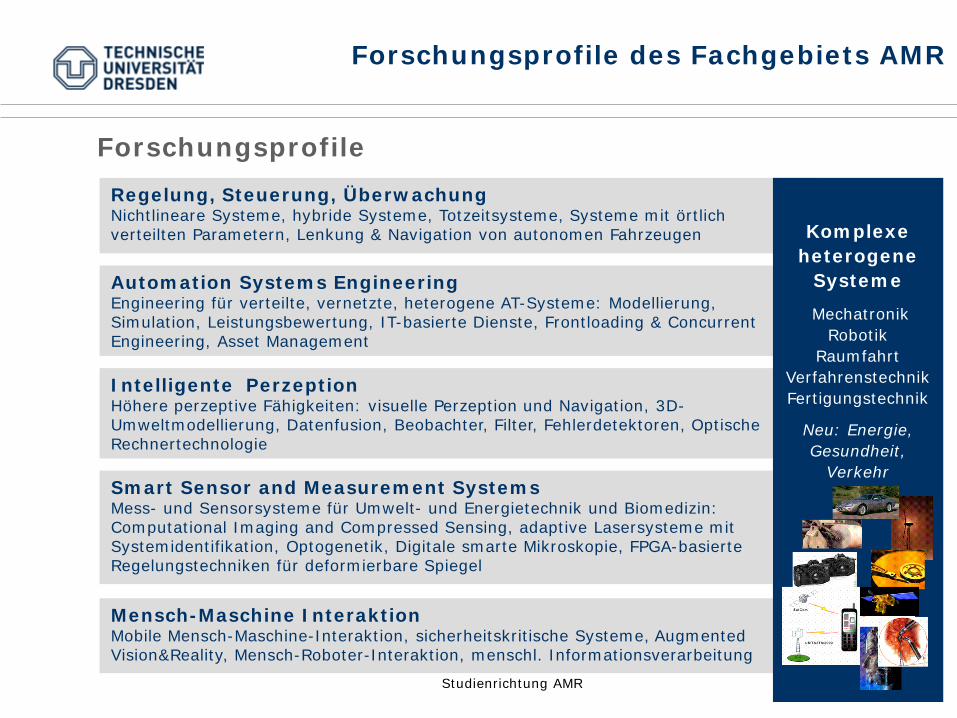
ForschungsprofileRegelung, Steuerung, ÜberwachungNichtlineare Systeme, hybride Systeme, Totzeitsysteme, Systeme mit örtlichverteilten Parametern, Lenkung & Navigation von autonomen Fahrzeugen
Automation Systems EngineeringEngineering für verteilte, vernetzte, heterogene AT-Systeme: Modellierung, Simulation, Leistungsbewertung, IT-basierte Dienste, Frontloading & Concurrent Engineering, Asset Management
Intelligente PerzeptionHöhere perzeptive Fähigkeiten: visuelle Perzeption und Navigation, 3D-Umweltmodellierung, Datenfusion, Beobachter, Filter, Fehlerdetektoren, OptischeRechnertechnologie
Smart Sensor and Measurement SystemsMess- und Sensorsysteme für Umwelt- und Energietechnik und Biomedizin:Computational Imaging and Compressed Sensing, adaptive Lasersysteme mitSystemidentifikation, Optogenetik, Digitale smarte Mikroskopie, FPGA-basierteRegelungstechniken für deformierbare Spiegel
Mensch-Maschine InteraktionMobile Mensch-Maschine-Interaktion, sicherheitskritische Systeme, Augmented Vision&Reality, Mensch-Roboter-Interaktion, menschl. Informationsverarbeitung
Komplexe heterogene
Systeme
Mechatronik Robotik
Raumfahrt VerfahrenstechnikFertigungstechnik
Neu: Energie, Gesundheit,
Verkehr
Forschungsprofile des Fachgebiets AMR

Professur für Mess- und Sensorsystemtechnik (MST)
Prof. Dr.-Ing. habil. Jürgen Czarske
Fakultät Elektrotechnik und Informationstechnik, Professur MST
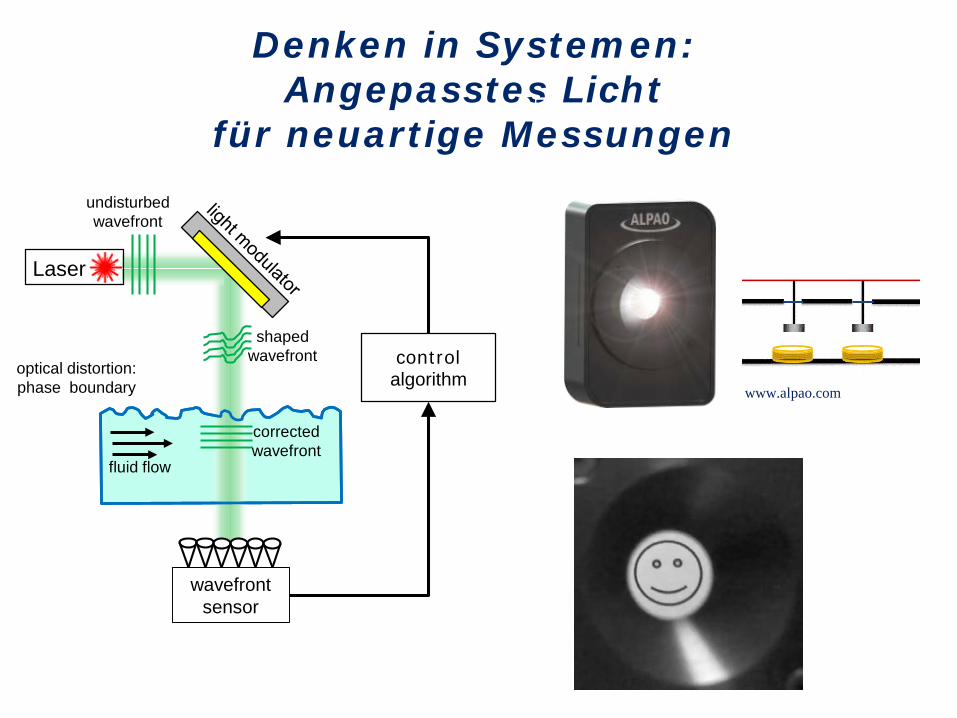
shapedwavefront
undisturbedwavefront
correctedwavefront
controlalgorithm
Laser
optical distortion: phase boundary
wavefrontsensor
fluid flow
Denken in Systemen:Angepasstes Licht
für neuartige Messungen 25
www.alpao.com
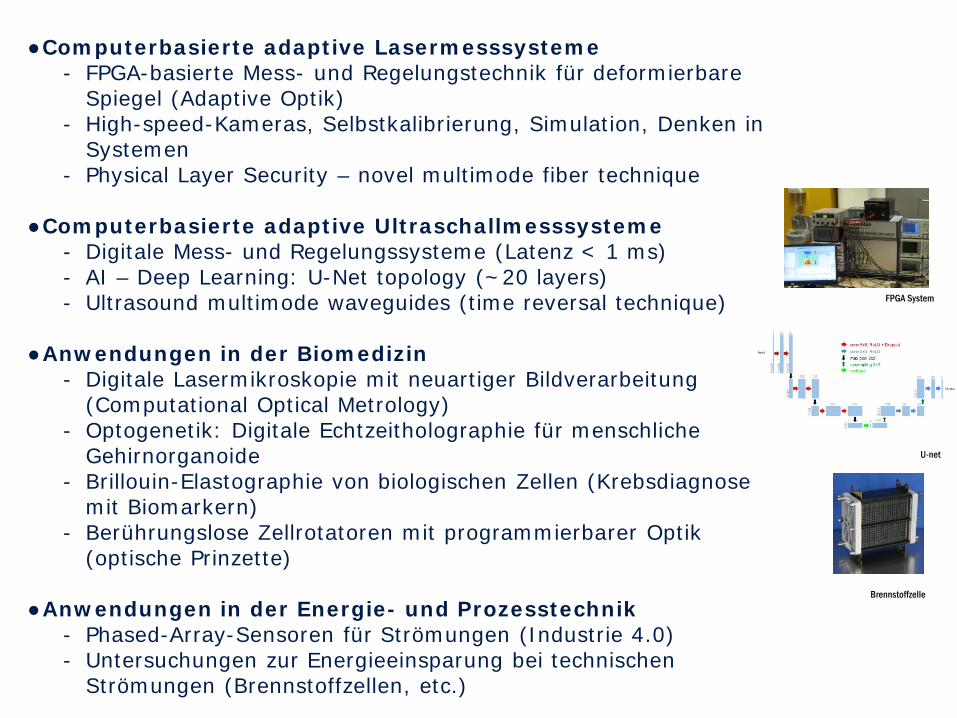
●Computerbasierte adaptive Lasermesssysteme- FPGA-basierte Mess- und Regelungstechnik für deformierbare
Spiegel (Adaptive Optik)- High-speed-Kameras, Selbstkalibrierung, Simulation, Denken in
Systemen- Physical Layer Security – novel multimode fiber technique
●Computerbasierte adaptive Ultraschallmesssysteme- Digitale Mess- und Regelungssysteme (Latenz < 1 ms)- AI – Deep Learning: U-Net topology (~20 layers)- Ultrasound multimode waveguides (time reversal technique)
●Anwendungen in der Biomedizin- Digitale Lasermikroskopie mit neuartiger Bildverarbeitung
(Computational Optical Metrology)- Optogenetik: Digitale Echtzeitholographie für menschliche
Gehirnorganoide- Brillouin-Elastographie von biologischen Zellen (Krebsdiagnose
mit Biomarkern)- Berührungslose Zellrotatoren mit programmierbarer Optik
(optische Prinzette)
●Anwendungen in der Energie- und Prozesstechnik- Phased-Array-Sensoren für Strömungen (Industrie 4.0)- Untersuchungen zur Energieeinsparung bei technischen
Strömungen (Brennstoffzellen, etc.)
FPGA System
U-net
Brennstoffzelle
Professur fürMess- und Sensorsystemtechnik
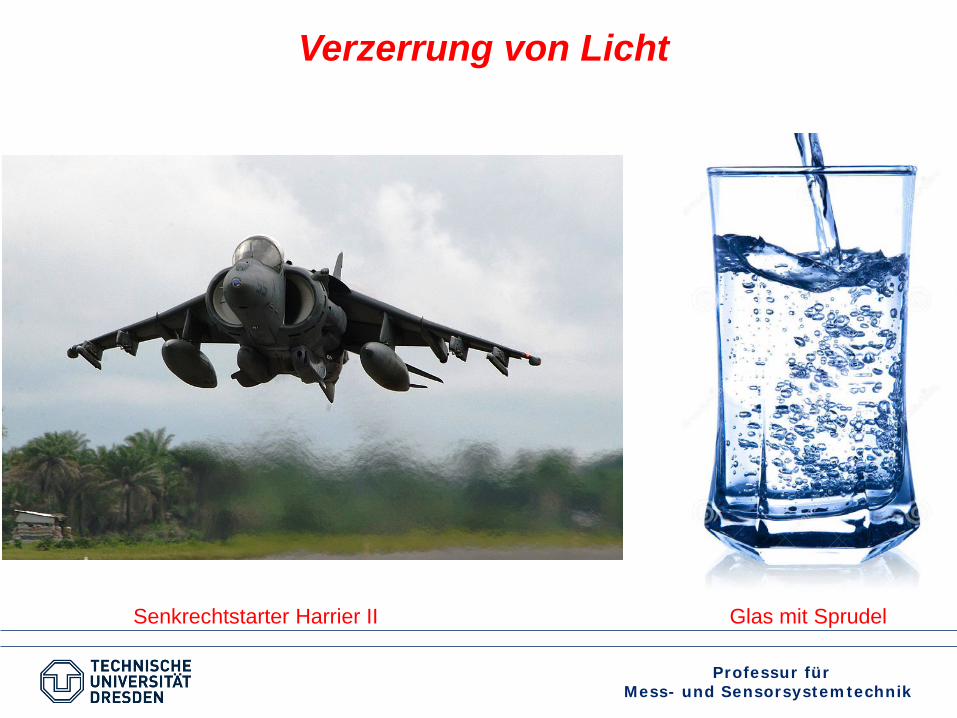
Verzerrung von Licht
Senkrechtstarter Harrier II Glas mit Sprudel
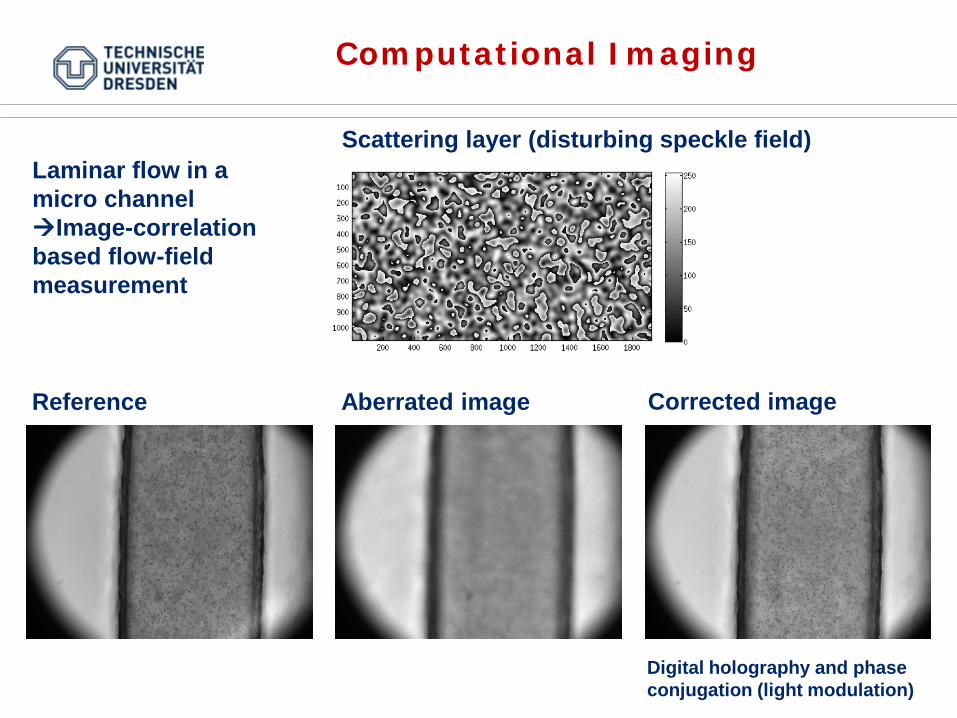
Computational Imaging
Reference
Laminar flow in a micro channelImage-correlationbased flow-fieldmeasurement
Scattering layer (disturbing speckle field)
Aberrated image Corrected image
Digital holography and phaseconjugation (light modulation)
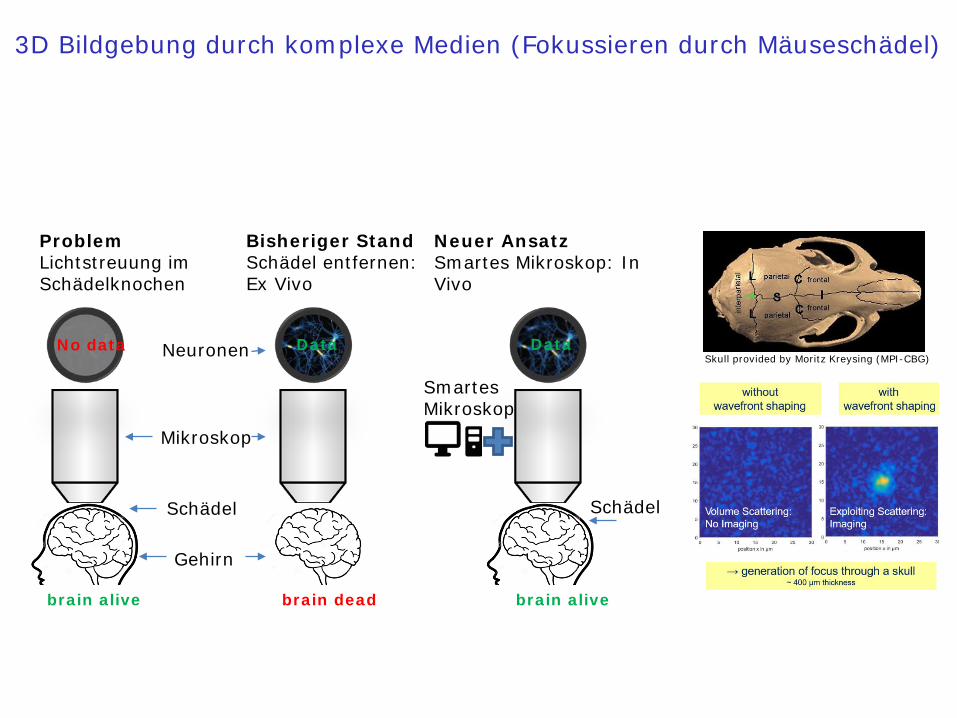
3D Bildgebung durch komplexe Medien (Fokussieren durch Mäuseschädel)
ProblemLichtstreuung imSchädelknochen
Bisheriger StandSchädel entfernen:Ex Vivo
Neuronen
Neuer AnsatzSmartes Mikroskop: In Vivo
Mikroskop
Schädel
Gehirn
brain alive
No data
brain dead
Data Data
brain alive
SmartesMikroskop
Skull provided by Moritz Kreysing (MPI-CBG)
Schädel
Studienrichtung AMR
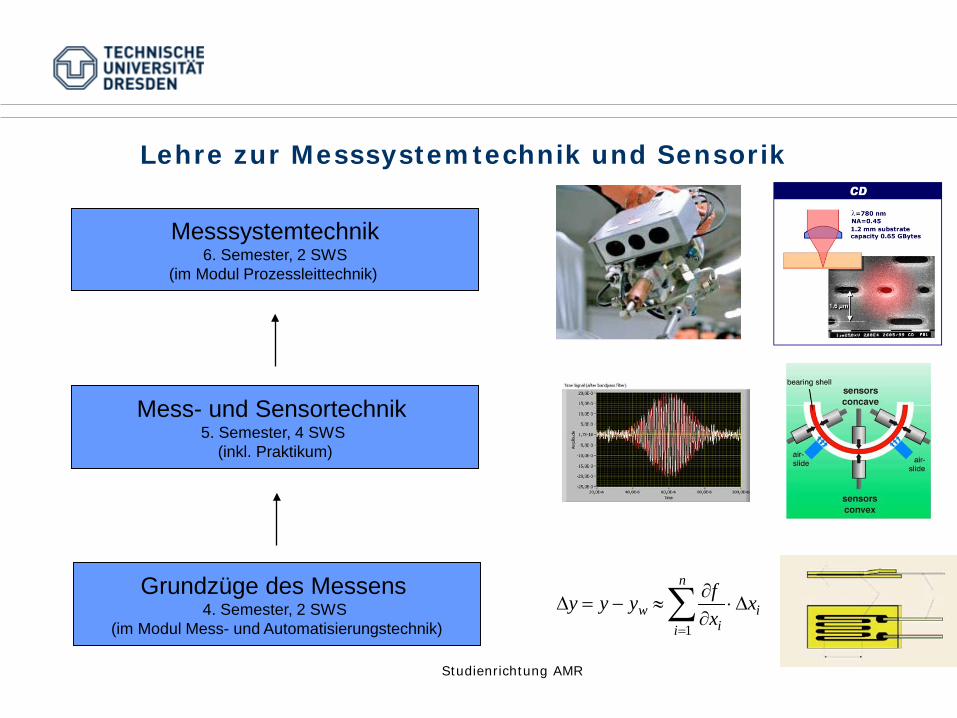
Lehre zur Messsystemtechnik und Sensorik
Mess- und Sensortechnik 5. Semester, 4 SWS
(inkl. Praktikum)
Grundzüge des Messens 4. Semester, 2 SWS
(im Modul Mess- und Automatisierungstechnik)
Messsystemtechnik6. Semester, 2 SWS
(im Modul Prozessleittechnik)
1
n
w iii
fy y y xx
=
∂∆ = − ≈ ⋅∆
∂∑
Professur für Prozessleittechnik
Prof. Dr.-Ing. habil. Leon Urbas
Fakultätsname ETIT Institut für Automatisierungstechnik, Professur für Prozessleittechnik
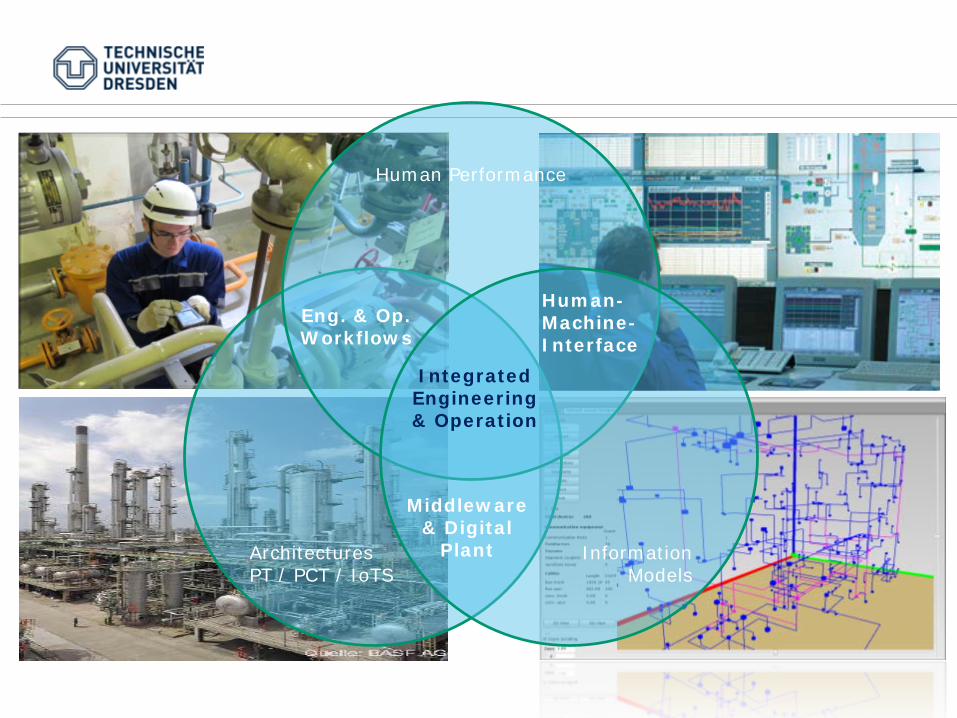
ArchitecturesPT / PCT / IoTS
Human Performance
InformationModels
Human-Machine-Interface
Eng. & Op.Workflows
Middleware & Digital
Plant
IntegratedEngineering& Operation
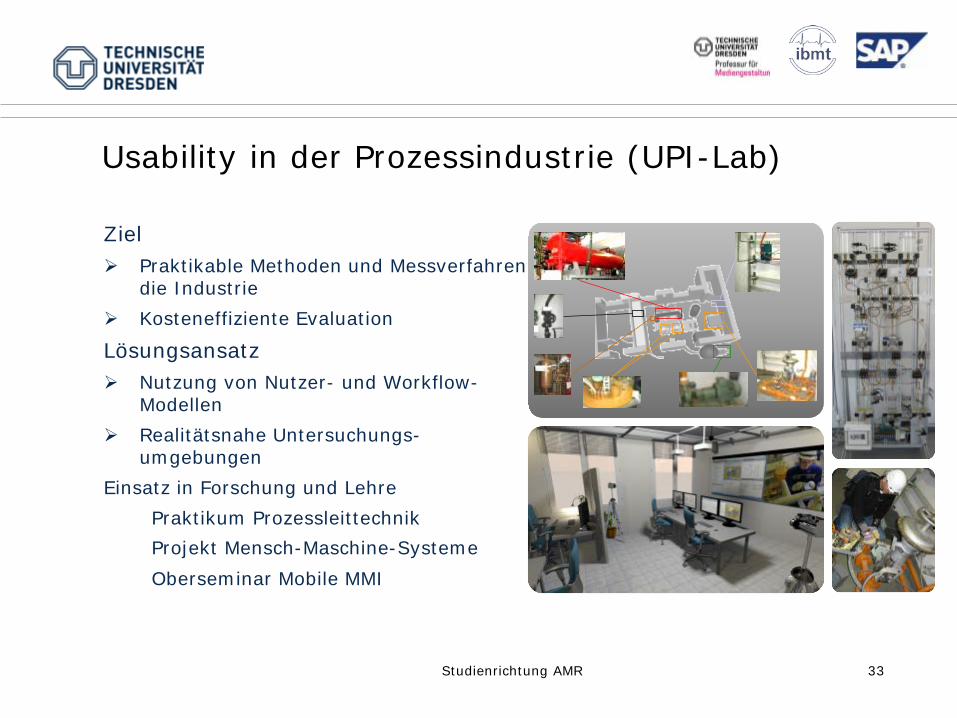
Studienrichtung AMR 33
Ziel Praktikable Methoden und Messverfahren für
die Industrie Kosteneffiziente Evaluation
Lösungsansatz Nutzung von Nutzer- und Workflow-
Modellen Realitätsnahe Untersuchungs-
umgebungenEinsatz in Forschung und Lehre
Praktikum ProzessleittechnikProjekt Mensch-Maschine-SystemeOberseminar Mobile MMI
Usability in der Prozessindustrie (UPI-Lab)
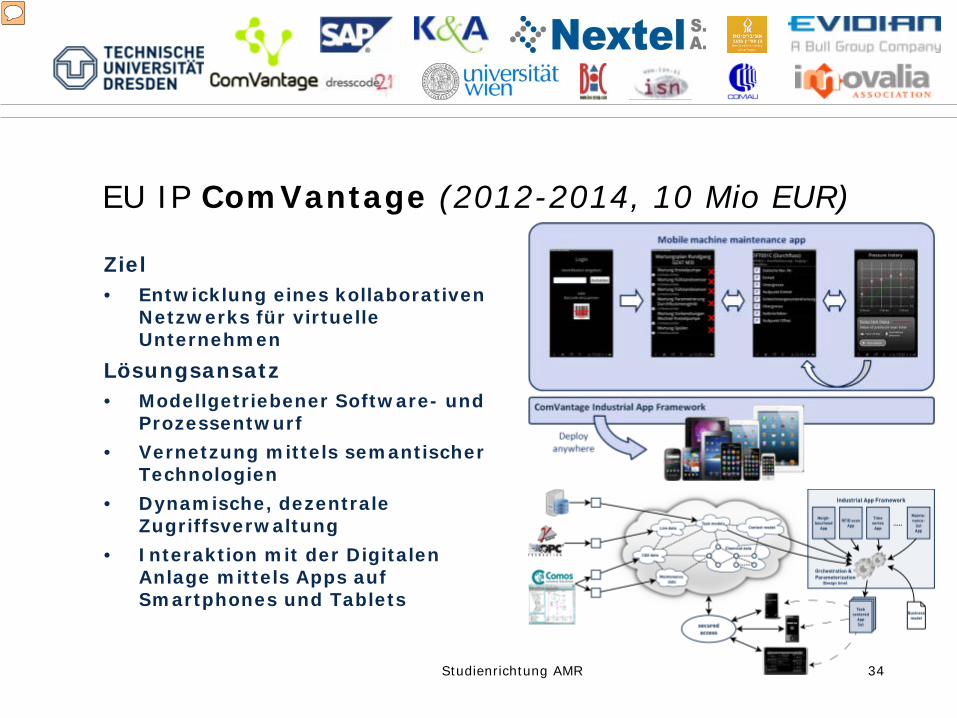
EU IP ComVantage (2012-2014, 10 Mio EUR)
Ziel• Entwicklung eines kollaborativen
Netzwerks für virtuelle Unternehmen
Lösungsansatz• Modellgetriebener Software- und
Prozessentwurf• Vernetzung mittels semantischer
Technologien• Dynamische, dezentrale
Zugriffsverwaltung• Interaktion mit der Digitalen
Anlage mittels Apps auf Smartphones und Tablets
Studienrichtung AMR 34
Professur für Regelungs- und Steuerungs-theorie
Prof. Dr.-Ing. habil. Dipl.-Math. Klaus Röbenack
Fakultät Elektrotechnik und Informationstechnik Institut für Regelungs- und Steuerungstheorie
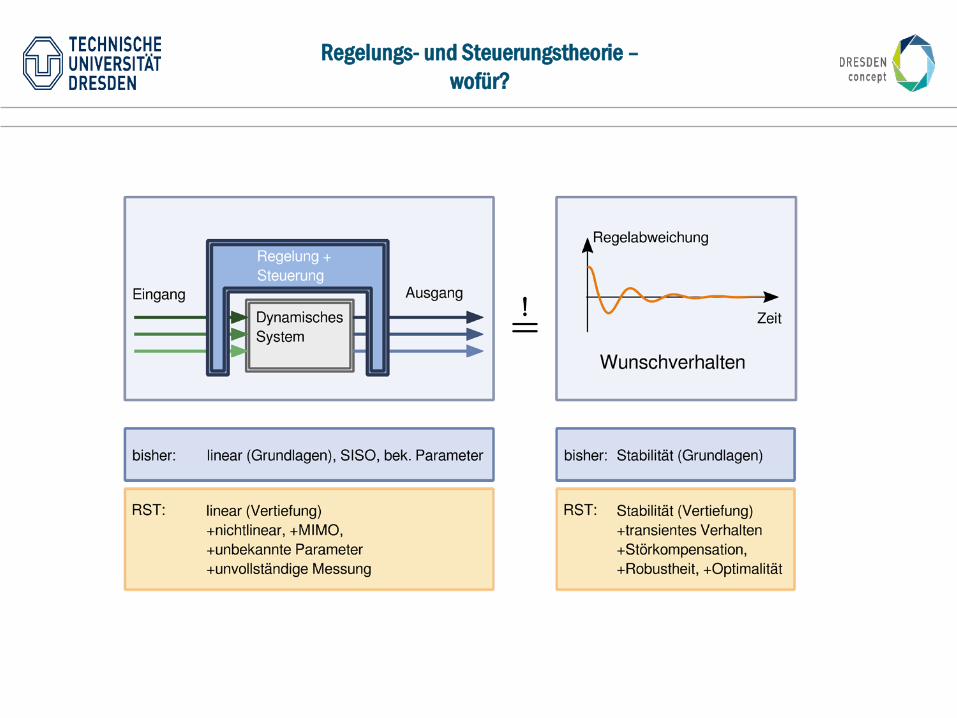
Regelungs- und Steuerungstheorie –wofür?
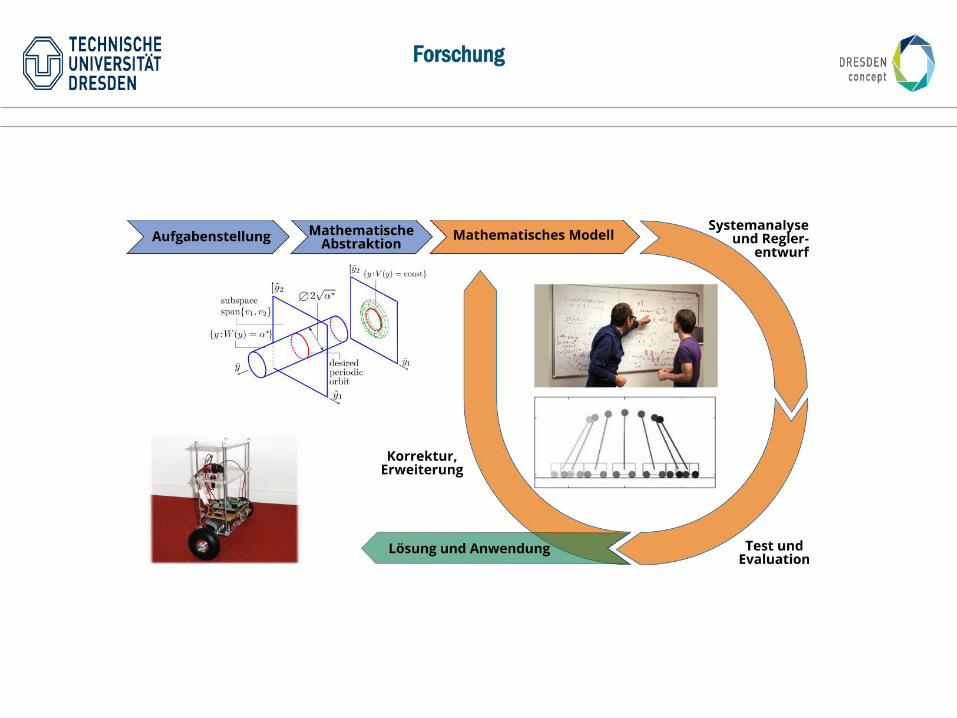
Forschung
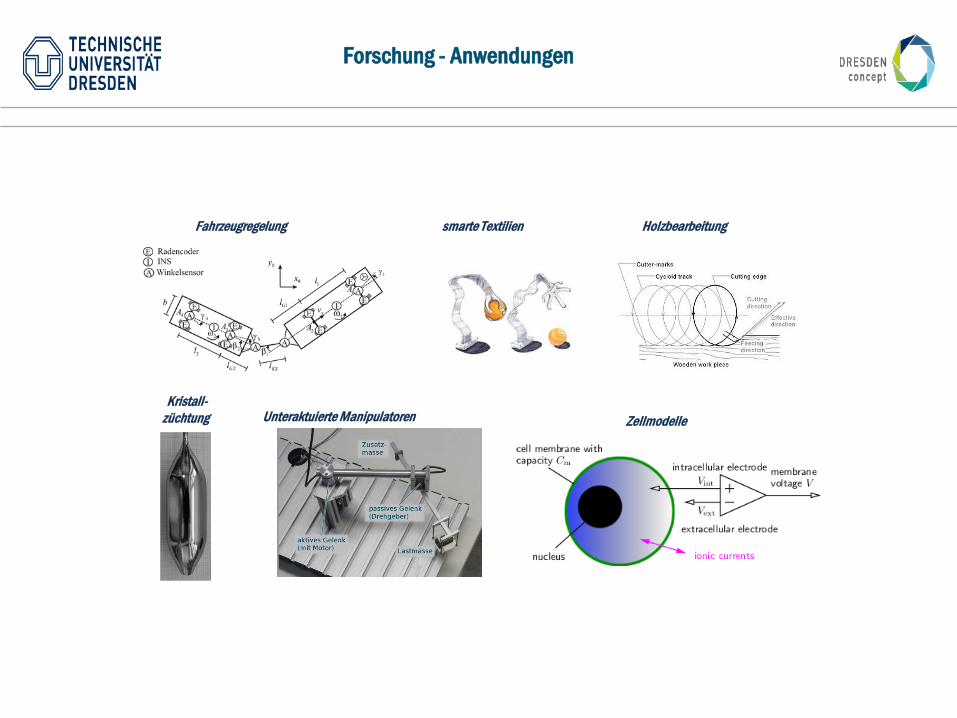
Forschung - Anwendungen
Kristall-züchtung
Holzbearbeitungsmarte TextilienFahrzeugregelung
ZellmodelleUnteraktuierte Manipulatoren
Vorlesungen: Regelungstechnik 1+2 Nichtlineare Regelungstechnik 1+2 Mehrgrößenregelung Prozessidentifikation Flachheitsbasierte Folgeregelung Optimale Steuerung Robuste Regelung
Zusätzlich Methodenwissen: Numerik Computer-Algebra Programmierung
Lehre – Vorlesungen/ Übungen

Didaktisch optimierte Praktikumsversuche zurErgänzung und Vertiefung der Theoriekenntnisse
Drehzahlregelung Schwebekörper Helikopter Mobiler balancierender Roboter Dreifachpendel
Lehre – Praktika

Professur für Automatisierungstechnik
Prof. Dr.techn. Klaus Janschek
Fakultätsname ETIT Institut für Automatisierungstechnik
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
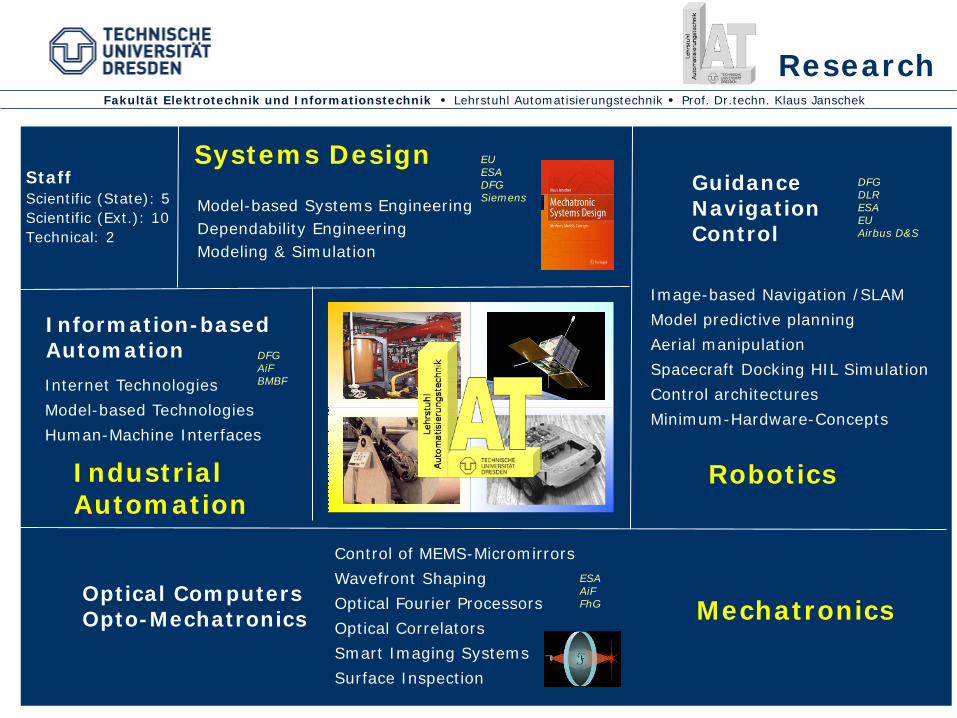
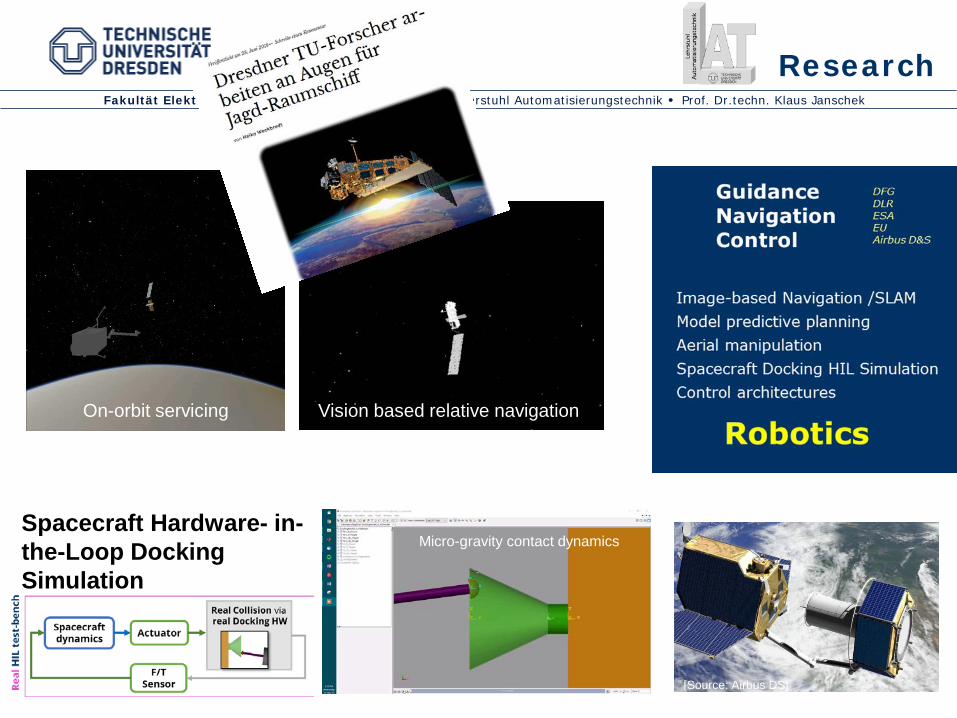
GuidanceNavigation Control
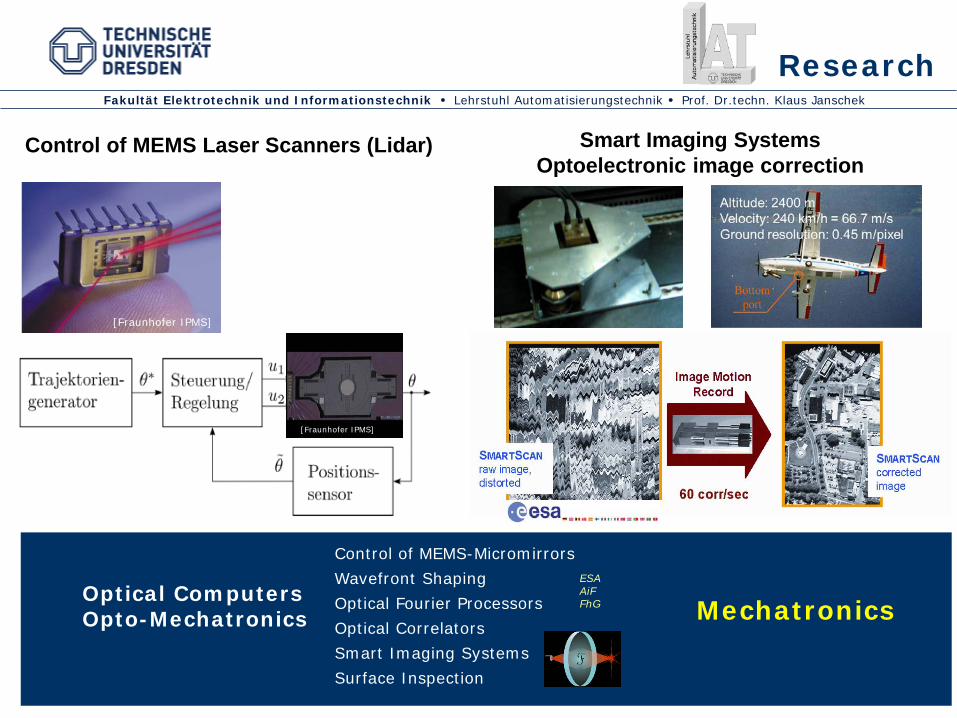
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Robotics
Information-basedAutomationInternet Technologies Model-based TechnologiesHuman-Machine Interfaces
Industrial Automation
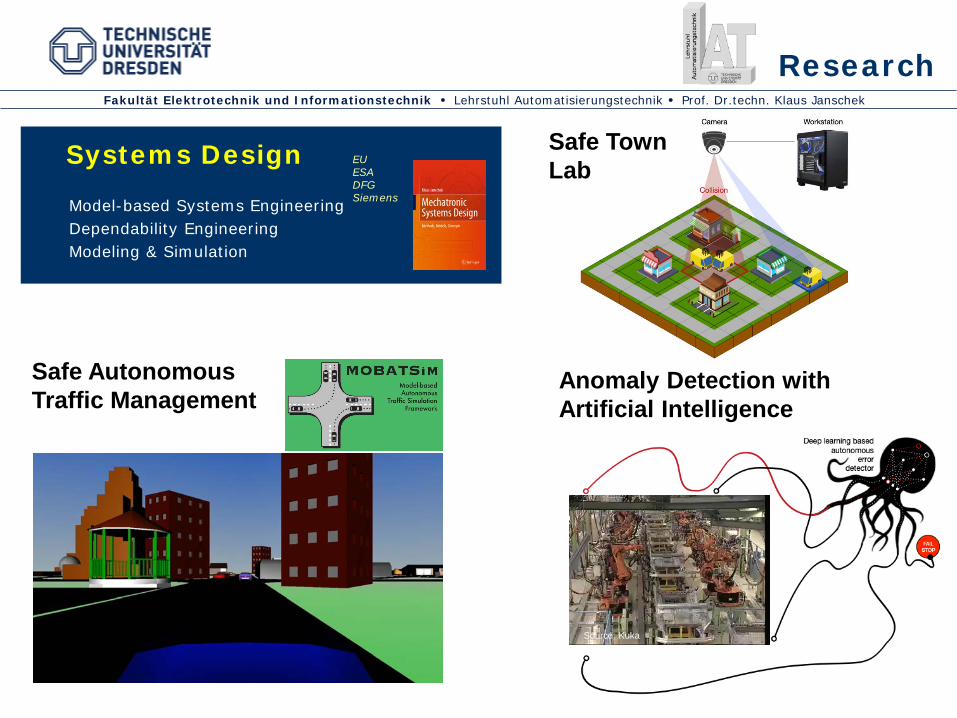
Systems Design
Research
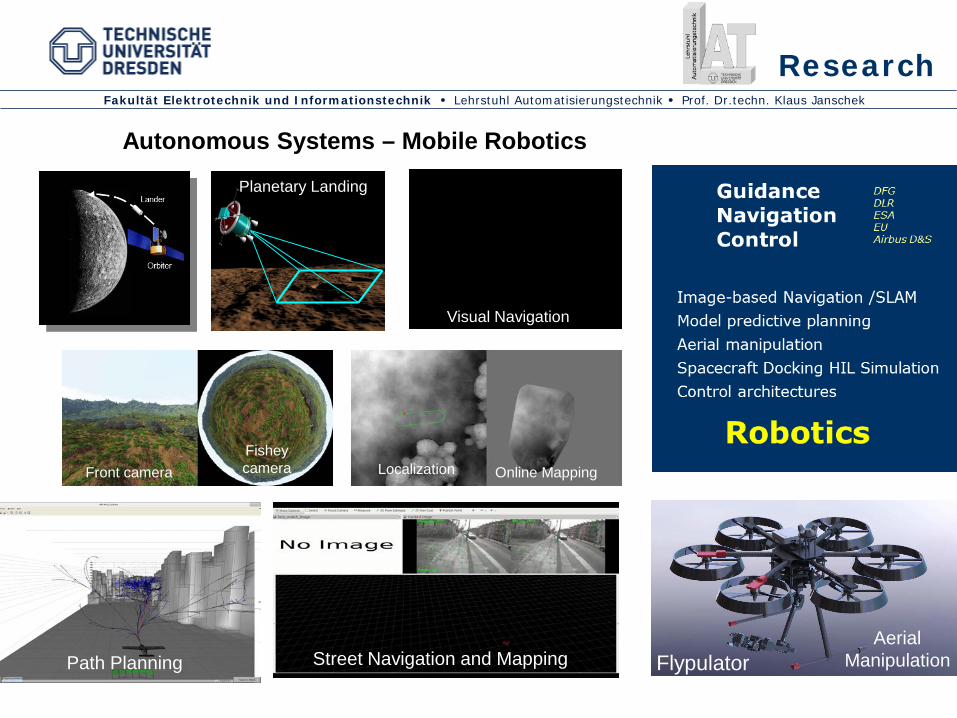
Image-based Navigation /SLAMModel predictive planningAerial manipulationSpacecraft Docking HIL SimulationControl architecturesMinimum-Hardware-Concepts
DFGDLRESAEUAirbus D&S
ESA AiFFhG
DFGAiFBMBF
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
StaffScientific (State): 5Scientific (Ext.): 10 Technical: 2
Mechatronics
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
FlypulatorAerial
ManipulationStreet Navigation and Mapping
Planetary Landing
Visual Navigation
FisheycameraFront camera Localization Online Mapping
Path Planning
Autonomous Systems – Mobile Robotics
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
Vision based relative navigationOn-orbit servicing
[Source: Airbus DS]
Spacecraft Hardware- in-the-Loop Docking Simulation
Micro-gravity contact dynamics
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Systems Design
Research
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
Safe Town Lab
Anomaly Detection withArtificial Intelligence
Safe AutonomousTraffic Management
Source: Kuka
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Research
ESA AiFFhG Mechatronics
Control of MEMS Laser Scanners (Lidar)
[Fraunhofer IPMS]
Smart Imaging Systems Optoelectronic image correction
[Fraunhofer IPMS]
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Lehre
Diplom-/Masterstudiengänge• Elektrotechnik• Mechatronik• Informationssystemtechnik• Regenerative Energiesysteme• Wirtschaftsingenieure• Maschinenbau (Luft- und Raumfahrt)
Lehrveranstaltungen• Automatisierungstechnik (Grundstudium)
• Ereignisdiskrete Systeme 1, 2 (+P)
• Modellbildung & Simulation (+P)
• Systementwurf (+P)
• Industrielle AT : Entwurf eingebetteter Systeme
• Internet in der AT, Teleautomation (P), XML- und Web@AT
• Mechatronische Systeme, Regelung von Mehrkörpersystemen
• Robotik: Steuerung von Manipulatoren + mobilen Robotern
• Bahn- und Lageregelung für Raumfahrzeuge
• Model-based Dependability Analysis
• Seminare: Hauptseminar AMR, Mobile Robotik, Modellbildung & Simulation

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
GuidanceNavigation Control
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Robotics
Information-basedAutomationInternet Technologies Model-based TechnologiesHuman-Machine Interfaces
Industrial Automation
Systems Design
Research
Image-based Navigation /SLAMModel predictive planningAerial manipulationSpacecraft Docking HIL SimulationControl architecturesMinimum-Hardware-Concepts
DFGDLRESAEUAirbus D&S
ESA AiFFhG
DFGAiFBMBF
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
StaffScientific (State): 5Scientific (Ext.): 10 Technical: 2
Mechatronics

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
FlypulatorAerial
ManipulationStreet Navigation and Mapping
Planetary Landing
Visual Navigation
FisheycameraFront camera Localization Online Mapping
Path Planning
Autonomous Systems – Mobile Robotics

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
Vision based relative navigationOn-orbit servicing
[Source: Airbus DS]
Spacecraft Hardware- in-the-Loop Docking Simulation
Micro-gravity contact dynamics

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Systems Design
Research
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
Safe Town Lab
Anomaly Detection withArtificial Intelligence
Safe AutonomousTraffic Management
Source: Kuka

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Research
ESA AiFFhG Mechatronics
Control of MEMS Laser Scanners (Lidar)
[Fraunhofer IPMS]
Smart Imaging Systems Optoelectronic image correction
[Fraunhofer IPMS]

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Lehre
Diplom-/Masterstudiengänge• Elektrotechnik• Mechatronik• Informationssystemtechnik• Regenerative Energiesysteme• Wirtschaftsingenieure• Maschinenbau (Luft- und Raumfahrt)
Lehrveranstaltungen• Automatisierungstechnik (Grundstudium)
• Ereignisdiskrete Systeme 1, 2 (+P)
• Modellbildung & Simulation (+P)
• Systementwurf (+P)
• Industrielle AT : Entwurf eingebetteter Systeme
• Internet in der AT, Teleautomation (P), XML- und Web@AT
• Mechatronische Systeme, Regelung von Mehrkörpersystemen
• Robotik: Steuerung von Manipulatoren + mobilen Robotern
• Bahn- und Lageregelung für Raumfahrzeuge
• Model-based Dependability Analysis
• Seminare: Hauptseminar AMR, Mobile Robotik, Modellbildung & Simulation
Top Related