







Languages
Pages
Legal

Single sourse shortest paths: formulation
GIVEN: weighted, directed graph G = (V, E), weight function w : E → R.
Weight of path p = (v0, v1, . . . , vk):
w(p) =
kX
i=1
w(vi−1, vi).
Shortest path weight from u to v:
δ(u, v) =
8
<
:
min{w(p)} if u v,
∞ otherwise.
Shortest path from u to v: every path p with w(p) = δ(u, v).
Single source shortest path: Given a graph G = (V, E) find a shortest path from anode u to each vertex v ∈ V .
BFS: shortest path in unweighted graphs.
Data Structures – p.1/32

Formulation (II)
Same algorithms can solve many variants:
Single destination shortest path. Find shortest paths from all nodes to a given node.
Single pair shortest path. No algorithm known that is asymptotically faster for thisproblem.
All-pairs shortest paths: we’ll study this problem on its own.
Data Structures – p.2/32

Optimal substructure property
Informally: A shortest path contain other shortest paths within it.
Hallmark of both dynamic programming and greedy.
Dijkstra: greedy, Floyd-Warshall dynamic programming.
Each task could be specified in terms of input and output.
Lemma 1 Given weighted, directed graph G = (V, E) with weight function w, letp = (v1, . . . vk) be a shortest path from v1 to vk and, for any 1 ≤ i < j ≤ k let pi,j thesubpath of p from vi to vj . Then pi,j is a shortest path.
Data Structures – p.3/32
Negative weight edges
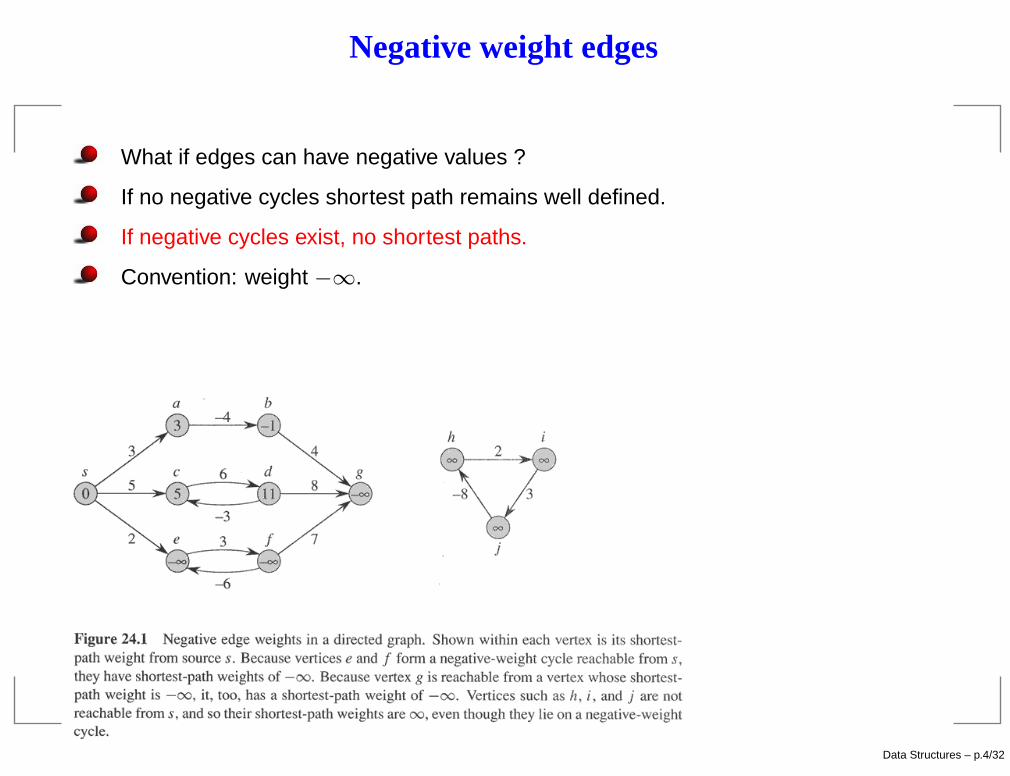
What if edges can have negative values ?
If no negative cycles shortest path remains well defined.
If negative cycles exist, no shortest paths.
Convention: weight −∞.
Data Structures – p.4/32

Positive weight cycles
No shortest path can contain any positive weight cycles.
0-weight cycles: can be eliminated from shortest path to produce another shortestpath with fewer edges.
Without loss of generality: acyclic shortest paths. At most |V | − 1 edges.
Representing shortest paths: like BFS trees. π[v] predecessor of v. Either anothervertex or NIL.
Can "go backwards" on π to print shortest paths.
During the execution of algorithm π does not indicate shortest paths.
Predecessor subgraph: Gπ = (Vπ , Eπ).
Vπ = {v ∈ V : π[v] 6= NIL} ∪ {s}.
Eπ = {(π[v], v) ∈ E : v ∈ Vπ \ {s}}.
At termination Gπ is a shortest path tree.
Data Structures – p.5/32

Shortest path trees
A shortest path tree rooted at s is a directed subgraph G′ = (V ′, E′), with V ′ ⊆ V and E′ ⊆ E
s.t.:
V ′ is the set of vertices reachable from s,
G′ forms a rooted tree with root s, and
for all v ∈ V ′, the unique simple path from s to v in G′ is a shortest path from s to v inG.
Shortest paths: not necessarily unique, neither shortest path trees.
Data Structures – p.6/32

Relaxation
Common technique for algorithms in this section.
We maintain an attribute d[v], upper bound on distance from s to v. shortest pathestimate.
Initialization: θ(|V |).
INITIALIZE-SINGLE-SOURCE(G,s){
for each v ∈ V [G]
{
d[v] = ∞;
π[v] = NIL;
}
d[s]=0;
}
Data Structures – p.7/32

Relaxation
Relaxing an edge (u,v): testing whether we can improve the shortest path to v foundso far by going through u, if so updating d[v] and π[v].
Name relatation: historical reasons. Relaxation of the constraint d[v] ≤ d[u] + w(u, v),must be satisfied for d = δ(s, ·).
RELAX(u,v,w){
if (d[v]>d[u]+w[u][v]){
d[v]=d[u]+w[u][v];
π[v] = u;
};
}
Data Structures – p.8/32

Properties of shortest paths and relaxation
For correctness purposes following lemmas, proofs omitted.
Triangle inequality: for any edge (u, v) ∈ E, δ(s, v) ≤ δ(s, u) + w(u, v).
Upper bound property: Always d[v] ≥ δ(s, v). Once d[v] becomes equal to δ(s, v) itnever changes.
No path property: If there is no path from s to v then always d[v] = δ(s, v) = ∞.
Path-relaxation property: If p = (v0, . . . , vk) is a shortest path from s = v0 to vk andthe edges of p are relaxed in the order (v0, v1, (v1, v2), . . . , (vk−1, vk) thend[vk] = δ(s, vk). This holds irrespective of other relaxations.
Predecessor-subgraph property: Once d[v] = δ(s, v) for all v ∈ V , the predecessorsubgraph is a shortest-path tree rooted at s.
Data Structures – p.9/32

Bellman-Ford algorithm
BELLMAN-FORD(G,w,s)
{
for (int i=1;i< n;i++)
for each (u, v) in E
RELAX(u,v,w);
for each edge (u, v) in E
if (d[v]>d[u]+w[u][v])
return FALSE;
return TRUE;
}
Works in general case.
If negative cycle exists returns FALSE;
If no negative cycle reachable from s exists algorithm returns TRUE;
One can read shortest path from shortest path tree (updated by procedure RELAX);
Data Structures – p.10/32

BELLMAN-FORD(II)
Data Structures – p.11/32

Bellman-Ford: Analysis and Implementation
Running time: θ(|V | · |E|). Main loop |V | times, each of them complexity θ(|E|).
Correctness: path-relaxation property.
Member data to the SP class: d, π, w a list of vertices, a list of edges. Memberfunction RELAX.
Data Structures – p.12/32
Single Source Shortest Paths in DAGS.
DAGS: θ(|V | + |E|), rather than O(|V | · |E|).
first topologically sort vertices of the DAG.
If path exists from u to v then u before v in topologically sorted order.
Make just one pass on vertices in top. sort. order. Relax each edge that leaves thevertex.
IMPLEMENTATION: some of the arguments shown in the pseudocode not used,member data.
DAG-SHORTEST-PATHS(G,s)
{
TOP SORT()
INITIALIZE SINGLE SOURCE(s)
for each u ∈ V // taken in top. sorted order
for each v ∈ Adj[u]
RELAX(u,v,w);
}
Data Structures – p.13/32
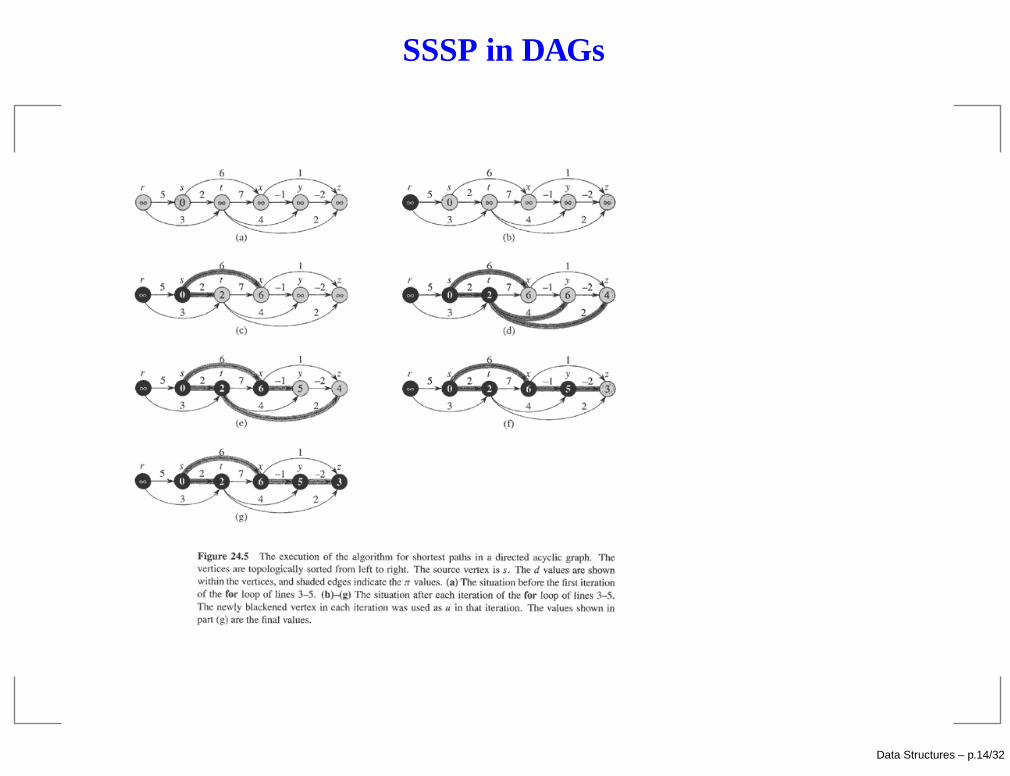
SSSP in DAGs
Data Structures – p.14/32

Application: PERT chart analysis
PERT chart: technique in project management.
edges represent jobs, edge weights represent times.
DAG: represents job dependencies.
critical path: longest path through the DAG. Lower bound on completion time.
ALGORITHM: negate all the weights and run DAG-SHORTEST-PATH.
Data Structures – p.15/32

Application: Difference constraints and shortest paths
Linear programming: m × n matrix A, m-vector B, n-vector C.
Want to find: vector x of n elements that maximizes the objective functionPn
i=1 cixi subjectto the m constraints Ax.
Simplex algorithm: randomized version runs in polynomial time (research result 2006)
More complicated method (ellipsoid method): polynomial time (worst case)
Feasibility problem: find feasible solution for Ax ≤ b or determine that none exists.
For vectors: x ≤ y if xi ≤ yi (componentwise inequalities).
Data Structures – p.16/32

System of difference constraints
Each constraint of type xj − xi ≤ bk.
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
@
1 −1 0 0 0
1 0 0 0 −1
0 1 0 0 −1
−1 0 1 0 0
−1 0 0 1 0
0 0 −1 1 0
0 0 −1 0 1
0 0 0 −1 1
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
·
0
B
B
B
B
B
B
B
@
x1
x2
x3
x4
x5
1
C
C
C
C
C
C
C
A
≤
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
@
0
−1
1
5
4
−1
−3
−3
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
Solution 1: x = (−5,−3, 0 − 1,−4), x′ = (0, 2, 5, 4, 1).
Lemma 2 If x is solution, then x + d = (xi + d) solution as well.
Data Structures – p.17/32

Constraint graphs
Each node corresponds to a variable.
Each directed edge corresponds to an inequality.
V = {v0, v1, . . . , vn}.
E = {(vi, vj) : xi − xj ≤ bk} ∪ {(v0, v1), (v0, v2), . . . , (v0, vn)}.
edge (vi, vj): edge weight bk.
weights: 0 for edges from v0.
Data Structures – p.18/32

Constraint graph: example
Data Structures – p.19/32
Solving difference constraints
Theorem 1 If constraint graph has no negative-weight cycles then
(δ(v0, v1), δ(v0, v1), . . . , δ(v0, vk)),
feasible solution. If negative cycle no solution.
ALGORITHM: Bellman-Ford. m constraints on n unknowns.COMPLEXITY: graph with n + 1 vertices and n + m edges. Using Bellman-Ford can solvesystem in O((n + 1)(n + m)) = O(n2 + nm) time.
Data Structures – p.20/32

Remember: Dijkstra’s algorithm
For the case of nonnegative weights.
With good implementation lower running time than Bellman-Ford.
Maintain: set S of vertices whose shortest-path weights from the source has alreadybeen determined.
Repeatedly selects the vertex u ∈ V \ S with minimum shortest path estimate, adds u
to S and relaxes all edges leaving u.
priority queue Q of vertices, keyed by values of function d.
priority queue: data structure for maintaining a set S of elements ordered by key.
Operations: INSERT(S,x), MINIMUM(S), EXTRACT-MIN(S), INCREASE-KEY(S,x,k).
EXTRACT-MIN(S): removes and returns the element of S with the largest key.
INCREASE-KEY(S,x,x): insert the value of element x’s key to the new value k,assumed to be at least as large as x’s current key.
Implemented: min-heap.
Data Structures – p.21/32

Dijkstra’s algorithm: pseudocode
DIJKSTRA(G,w,s){
INITIALIZE-SINGLE-SOURCE(G,s);
S = ∅
Q = V [G];
while (Q 6= ∅)
{
u = EXTRACT-MIN(Q);
S = S ∪ {u};
for each v ∈ Adj[u]
RELAX(u,v,w);
}
}
Data Structures – p.22/32
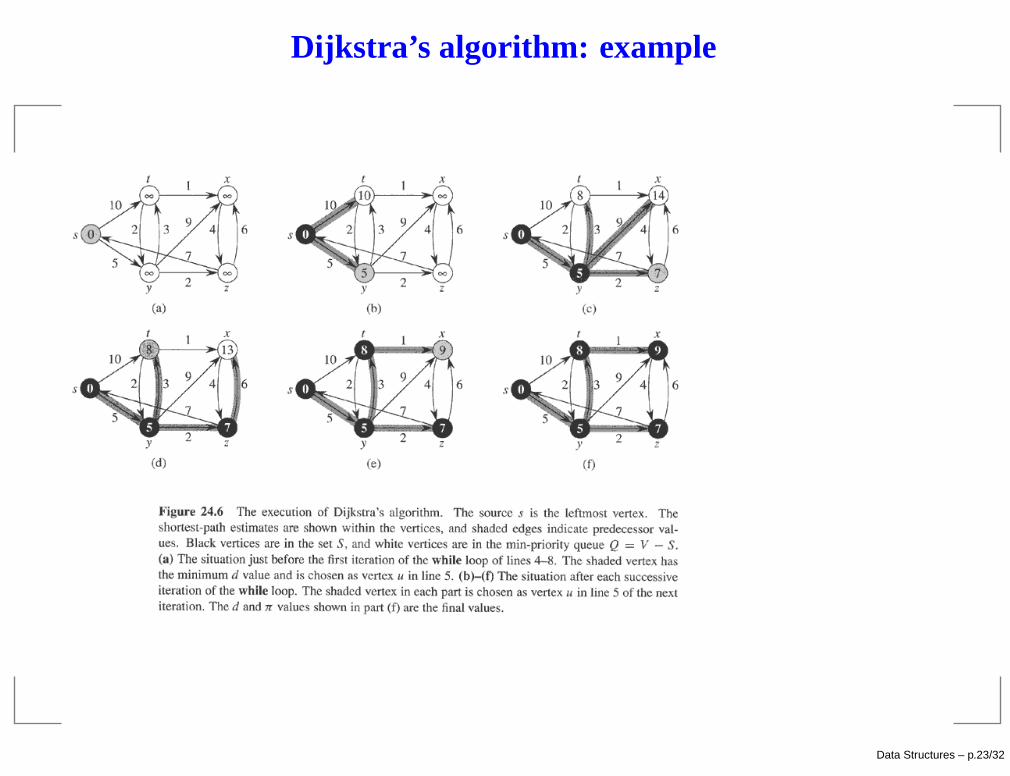
Dijkstra’s algorithm: example
Data Structures – p.23/32

Remember: Dijkstra’s algorithm (II)
used a min-priority queue.
Complexity: depends on the complexity of the min-heap implementation.
E iterations of the for loop, at most E DECREASE-KEY operations.
Simplest case: d[v] represented using vectors, written in the position INDEX(v).
INSERT, DECREASE-KEY: O(1), EXTRACT-MIN O(V ) time.
TOTAL: O(V 2 + E).
for sparse graphs: use min-binary heap.
EXTRACT-MIN: O(log(V )). DECREASE-KEY takes time O(log(V )), there are E
extractions.
TOTAL: O((V + E) log(V )).
Better for E = o(V 2/ log(V )).
Even better: using Fibonacci heaps: O(V log V + E).
Data Structures – p.24/32

All pairs shortest paths
Graph: represented as adjacency matrix with weights.
That is, W = (wi,j), where
wi,j =
8
>
>
<
>
>
:
0 if i = j,
w(i, j) if i 6= j and (i, j) ∈ E,
∞ if i 6= j and (i, j) 6∈ E,
Output: matrix D = (δ(i, j)), δ(·, ·) shortest distance.
Also want to print the shortest paths. Do so via predecessor matrix.
Π = (πi,j). πi,j = NIL if i = j or there is no shortest path from i to j.
Otherwise πi,j is a predecessor of j on a shortest path from i.
Subgraph induced by the i’th row: shortest path tree.
Data Structures – p.25/32
PRINT-ALL-PAIRS-SHORTEST-PATHS
PRINT-ALL-PAIRS-SHORTEST-PATHS(Π, i,j)
if (i == j)
print i;
else
if (πi,j== NIL)
print "no path from " i " to " j "exists";
else
{
PRINT-ALL-PAIRS-SHORTEST-PATH(i,πi,j);
print j;
}
Data Structures – p.26/32

Shortest paths and matrix multiplication
Consider a shortest path p from i to j, suppose no negative-weight cycles.
Then m finite.
If i = j then m = 0.
If i 6= j then p : i k →, p′ : i k has at most m − 1 edges.
By results from last time, p′ shortest path from i to k, so
δ(i, j) = δ(i, k) + wi,j .
δ(i, j) = min{δ(i, k) + wi,j}, min taken over all paths of length at most m − 1.
Dynamic programming !
Data Structures – p.27/32
Recursive solution to all-pairs shortest paths problem
Let l(m)i,j be the minimum weight of any path from i to j that contains at most m edges.
l(0)i,j =
8
<
:
0 if i = j,
∞ if i 6= j
For m ≥ 1
l(m)i,j = min{l
(m−1)i,j , min
k{l
(m−1)i,k
+ wk,j}} = mink
{l(m−1)i,k
+ wk,j}.
W = (wi,j), compute L(1), L(2), . . . , L(n−1), where for m = 1, 2, . . . , n − 1
L(m) = (l(m)i,j ).
L(n−1) contains all shortest path weights.
Data Structures – p.28/32
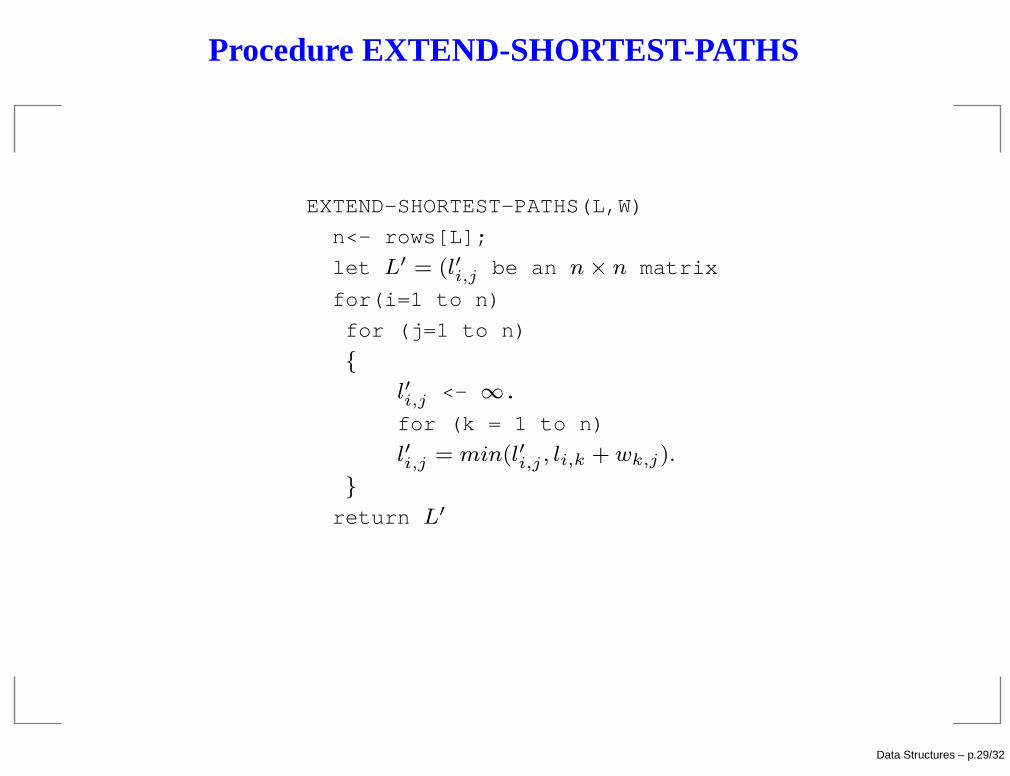
Procedure EXTEND-SHORTEST-PATHS
EXTEND-SHORTEST-PATHS(L,W)
n<- rows[L];
let L′ = (l′i,j be an n × n matrix
for(i=1 to n)
for (j=1 to n)
{
l′i,j <- ∞.
for (k = 1 to n)
l′i,j = min(l′i,j , li,k + wk,j).
}
return L′
Data Structures – p.29/32

All-pairs shortest paths and matrix multiplication
Matrix multiplication ci,j =P
k ai,k · bk,k.
If we make substitutions
l(m−1)− > a,
w− > b,
l(m)− > c,
min− > +,
+− > ·,
(also ∞ by 0) we obtain straightforward matrix multiplication algorithm.
Compute L(n−1). Faster algorithm.
Can assume n − 1 is a power of k.
Data Structures – p.30/32
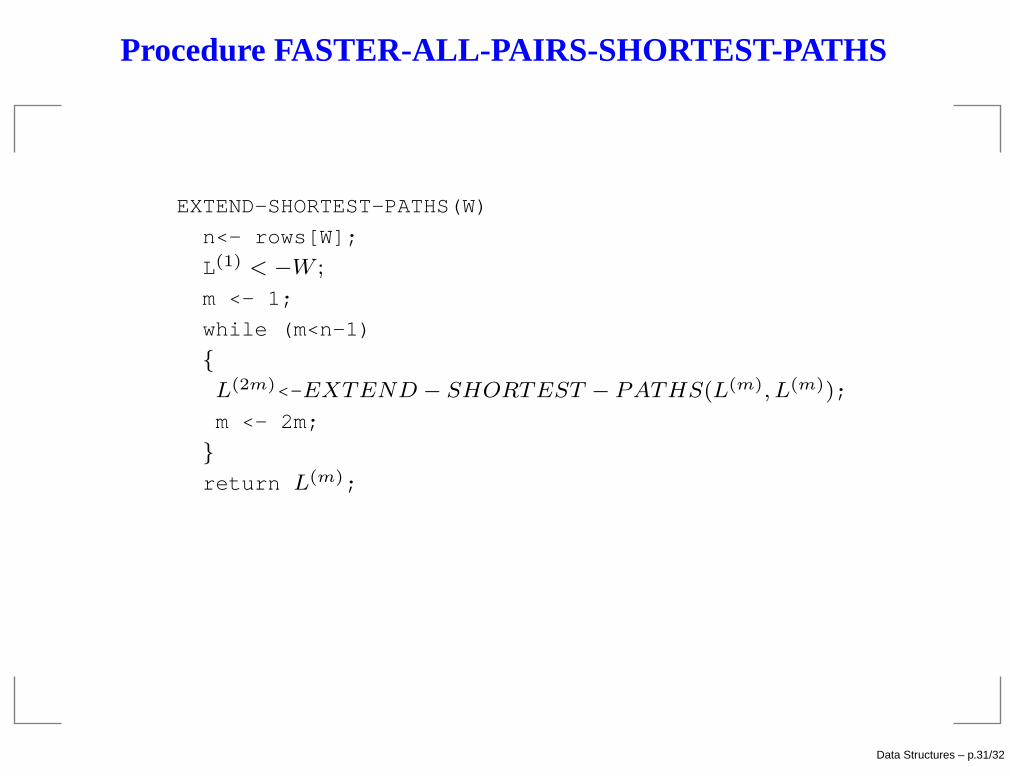
Procedure FASTER-ALL-PAIRS-SHORTEST-PATHS
EXTEND-SHORTEST-PATHS(W)
n<- rows[W];
L(1) < −W ;
m <- 1;
while (m<n-1)
{
L(2m)<-EXTEND − SHORTEST − PATHS(L(m), L(m));
m <- 2m;
}
return L(m);
Data Structures – p.31/32
Conclusions
Please ask questions if you don’t understand something!
Newsgroup for questions: adsuvt2007.
Any questions ?
Data Structures – p.32/32
Top Related