





Languages
Pages
Legal

11/16/2021
1
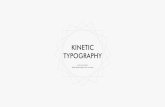
Rotational Motion Overview (Chapter 8, 9, 10)Chapters
[Pure] Rotational
Motion (8.1-4, 8.6-7):
Rotation about a fixed
Axis
Angular Kinematic Variables ( Ԧ𝜃, 𝜔, Ԧ𝛼) – Axis of Rotation (8.1-2)
Torque 𝝉 (8.3)
Moment of Inertia 𝐼 (8.4-5) and Rotational Kinetic Energy
Conservation of Energy including rotational motion (8.6)
Conservation of Angular Momentum 𝐿 (8.7)
Rolling Motion (9.1-9.5)
= rotation + translation
Understanding Rolling Motions (9.1-9.3)
Conservation of Energy: rotation and translation (9.5)
Newton’s 2nd Law: rotation and translation: acceleration (9.4)
Equilibrium (10.1-10.3) Σ Ԧ𝐹 = 0 and ΣԦ𝜏 = 0 (10.1, 10.2)
Equilibrium Lab, Applications (10.3)
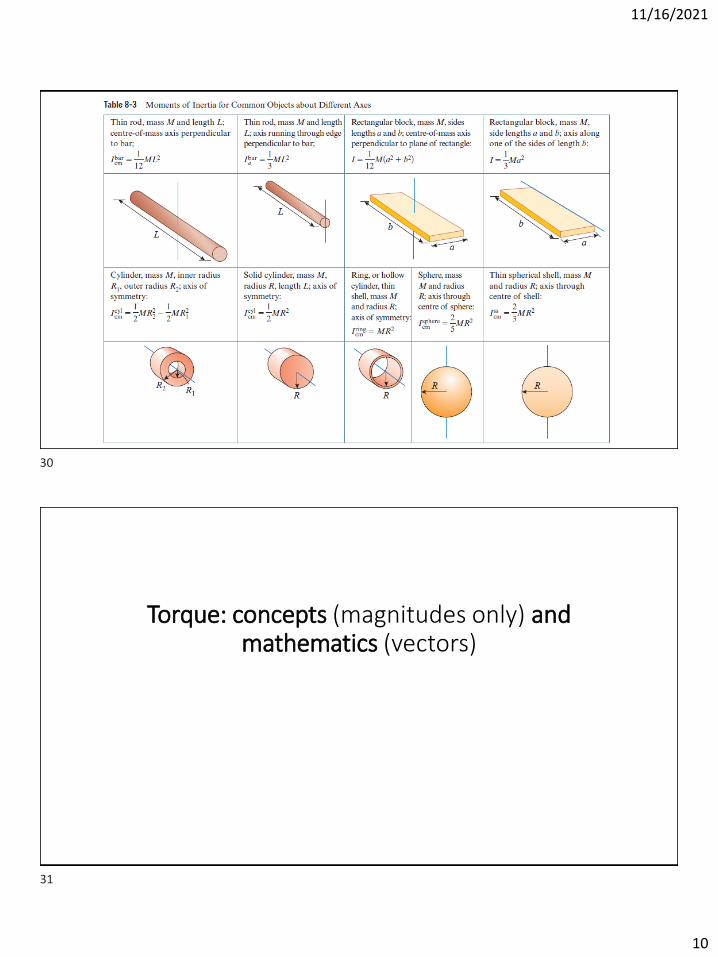
Overview: Rotational Kinetic Energy
• Use conservation of energy to solve rotational motion problems.• This requires knowing the Kinetic Energy in rotational motion.• Moment of Inertia.• Moment of Inertia depends on the axis of rotation.
• Moment of Inertial for rigid bodies.• Moment of inertia for a rod• Moment of inertial for a rectangle• Moment of inertia for a cylinder• Moment of inertia for a sphere
• Example Problems along the way
1
4
11/16/2021
2
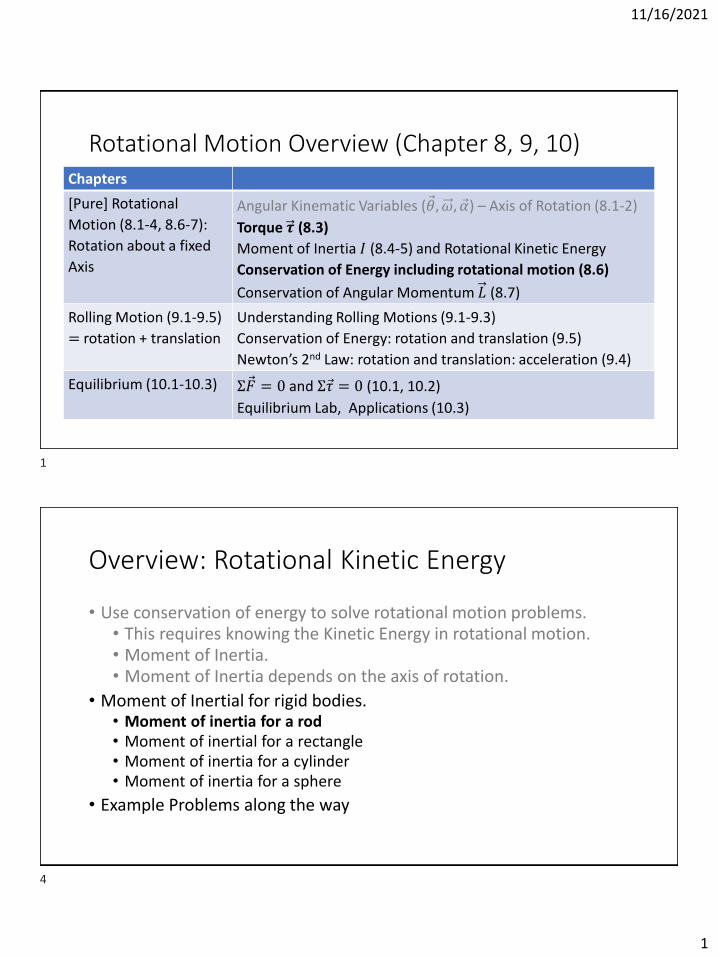
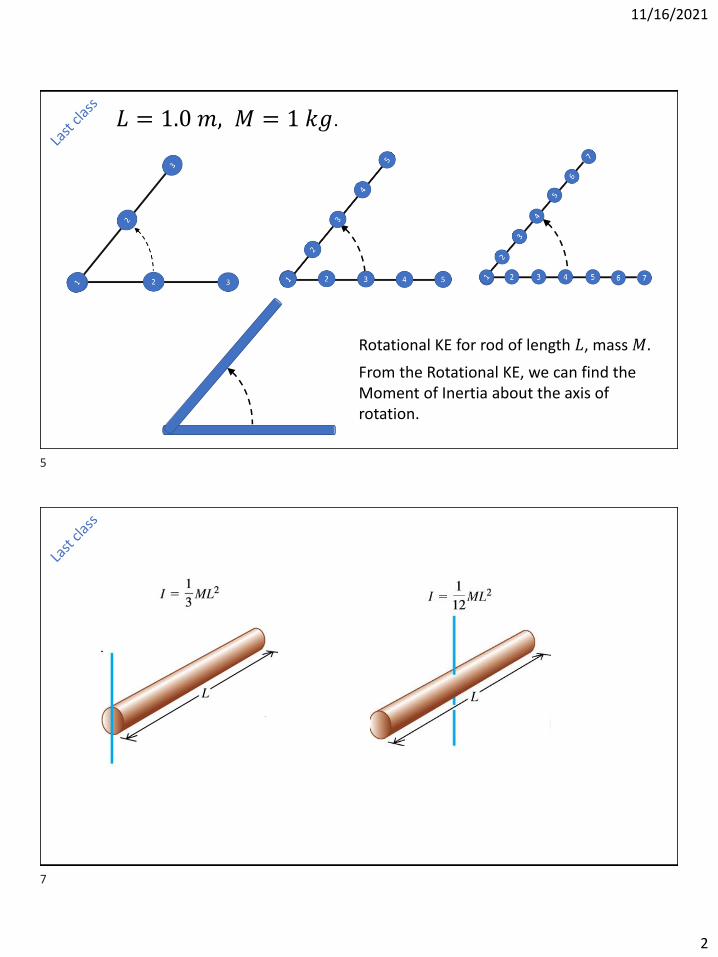
𝐿 = 1.0 𝑚, 𝑀 = 1 𝑘𝑔.
Rotational KE for rod of length 𝐿, mass 𝑀.
From the Rotational KE, we can find the Moment of Inertia about the axis of rotation.
5
7
11/16/2021
3
𝐿
𝑚1
𝑚2
𝑚2
𝑣 = ?
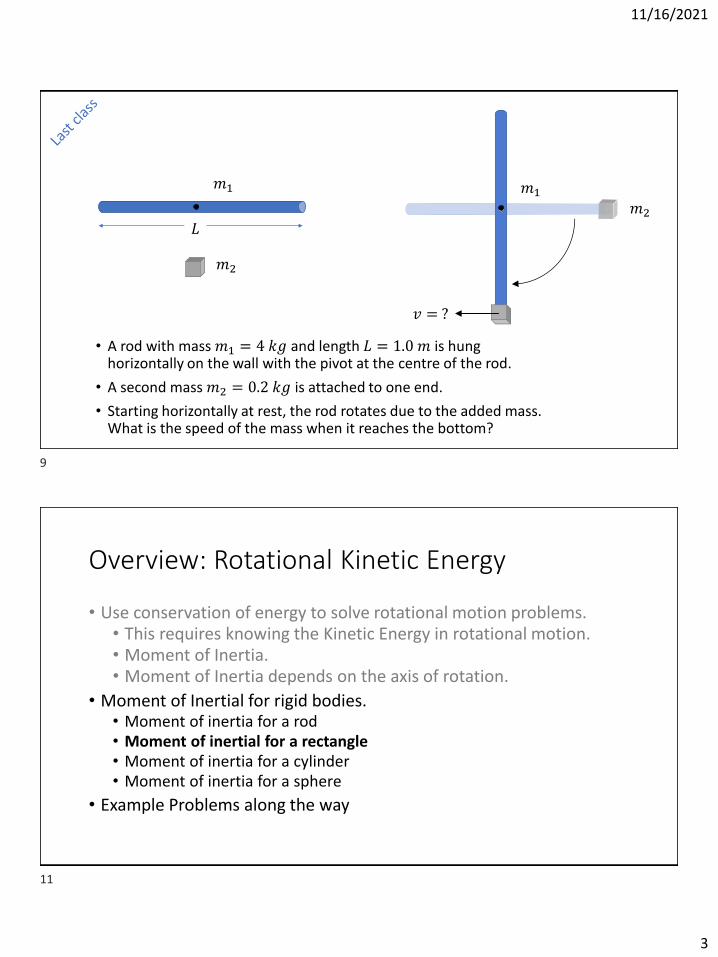
• A rod with mass 𝑚1 = 4 𝑘𝑔 and length 𝐿 = 1.0 𝑚 is hung horizontally on the wall with the pivot at the centre of the rod.
• A second mass 𝑚2 = 0.2 𝑘𝑔 is attached to one end.
• Starting horizontally at rest, the rod rotates due to the added mass. What is the speed of the mass when it reaches the bottom?
𝑚1
Overview: Rotational Kinetic Energy
• Use conservation of energy to solve rotational motion problems.• This requires knowing the Kinetic Energy in rotational motion.• Moment of Inertia.• Moment of Inertia depends on the axis of rotation.
• Moment of Inertial for rigid bodies.• Moment of inertia for a rod• Moment of inertial for a rectangle• Moment of inertia for a cylinder• Moment of inertia for a sphere
• Example Problems along the way
9
11

11/16/2021
4
Moment of inertia not in table.
• A rectangle has sides 𝑎 = 0.25 𝑚,𝑏 = 0.75 𝑚 with mass 𝑀 = 2.0 𝑘𝑔.
• Given that the moment of inertia of a
rectangle is 1
12𝑀(𝑎2 + 𝑏2) about the
centre of a rectangle, what are the moment of inertia at point A?
× × A
𝑏
𝑎
12
13
11/16/2021
5
Overview: Rotational Kinetic Energy
• Use conservation of energy to solve rotational motion problems.• This requires knowing the Kinetic Energy in rotational motion.• Moment of Inertia.• Moment of Inertia depends on the axis of rotation.
• Moment of Inertial for rigid bodies.• Moment of inertia for a rod• Moment of inertial for a rectangle• Moment of inertia for a cylinder• Moment of inertia for a sphere
• Example Problems along the way
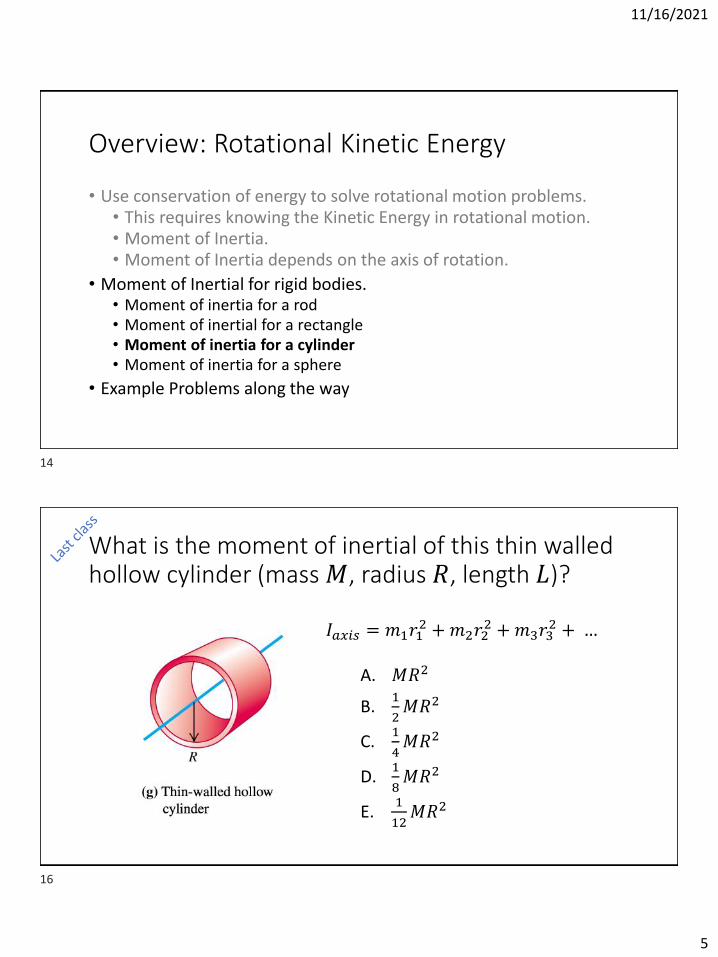
What is the moment of inertial of this thin walled hollow cylinder (mass 𝑀, radius 𝑅, length 𝐿)?
𝐼𝑎𝑥𝑖𝑠 = 𝑚1𝑟12 +𝑚2𝑟2
2 +𝑚3𝑟32 + …
A. 𝑀𝑅2
B.1
2𝑀𝑅2
C.1
4𝑀𝑅2
D.1
8𝑀𝑅2
E. 1
12𝑀𝑅2
14
16

11/16/2021
6
𝑚1
𝑚2
Rotational KE example problem
• Two masses, 𝑚1 = 2 𝑘𝑔,𝑚2 = 1 𝑘𝑔 are connected by a string with negligible weight.
• The string is then put around a pulley with mass 𝑀 = 6 𝑘𝑔 and radius 𝑅 = 0.5 𝑚.
• The pulley is made like a bicycle wheel where the mass is concentrated on the rim only.
• Initially, mass 𝑚1is at rest at height ℎ = 2 𝑚while 𝑚2 is resting on the ground.
• When released, what is the speed of 𝑚1 just before it hits the ground?
𝑀 = 6 𝑘𝑔𝑅 = 0.5 𝑚
𝑚1 = 2 𝑘𝑔
𝑚2
= 1 𝑘𝑔
𝑚1
𝑚2
Massless wheel for the moment (𝑀 = 0)
• Δ𝐾𝐸 =1
2𝑚1𝑣
2 +1
2𝑚2𝑣
2
• What is −Δ𝑃𝐸 = 𝑃𝐸𝑖 − 𝑃𝐸𝑓?
A. 𝑚1𝑔ℎ
B. 𝑚2𝑔ℎ
C. 𝑚1𝑔ℎ +𝑚2𝑔ℎ
D. 𝑚1𝑔ℎ −𝑚2𝑔ℎ
Conservation of Energy Δ𝐾𝐸 = −Δ𝑃𝐸𝑀 = 0
𝑚1 = 2 𝑘𝑔
𝑚2
= 1 𝑘𝑔
18
19

11/16/2021
7
𝑚1
𝑚2
Massless wheel for the moment (𝑀 = 0)
• Δ𝐾𝐸 =1
2𝑚1𝑣
2 +1
2𝑚2𝑣
2
• −Δ𝑃𝐸 = 𝑃𝐸𝑖 − 𝑃𝐸𝑓 = 𝑚1𝑔ℎ −𝑚2𝑔ℎ
Conservation of Energy Δ𝐾𝐸 = −Δ𝑃𝐸
1
2𝑚1𝑣
2 +1
2𝑚2𝑣
2 =𝑚1𝑔ℎ −𝑚2𝑔ℎ
𝑀 = 0
𝑚1 = 2 𝑘𝑔
𝑚2
= 1 𝑘𝑔
𝑚1
𝑚2
Massless wheel for the moment (𝑀 = 6 𝑘𝑔)
• −Δ𝑃𝐸 = 𝑃𝐸𝑖 − 𝑃𝐸𝑓 = 𝑚1𝑔ℎ −𝑚2𝑔ℎ
• Δ𝐾𝐸 =1
2𝑚1𝑣
2 +1
2𝑚2𝑣
2 + Δ𝐾𝐸𝑟𝑜𝑡𝑎𝑡𝑖𝑜𝑛
Conservation of Energy Δ𝐾𝐸 = −Δ𝑃𝐸𝑀 = 6 𝑘𝑔𝑅 = 0.5 𝑚
𝑚1 = 2 𝑘𝑔
𝑚2
= 1 𝑘𝑔
20
21
11/16/2021
8
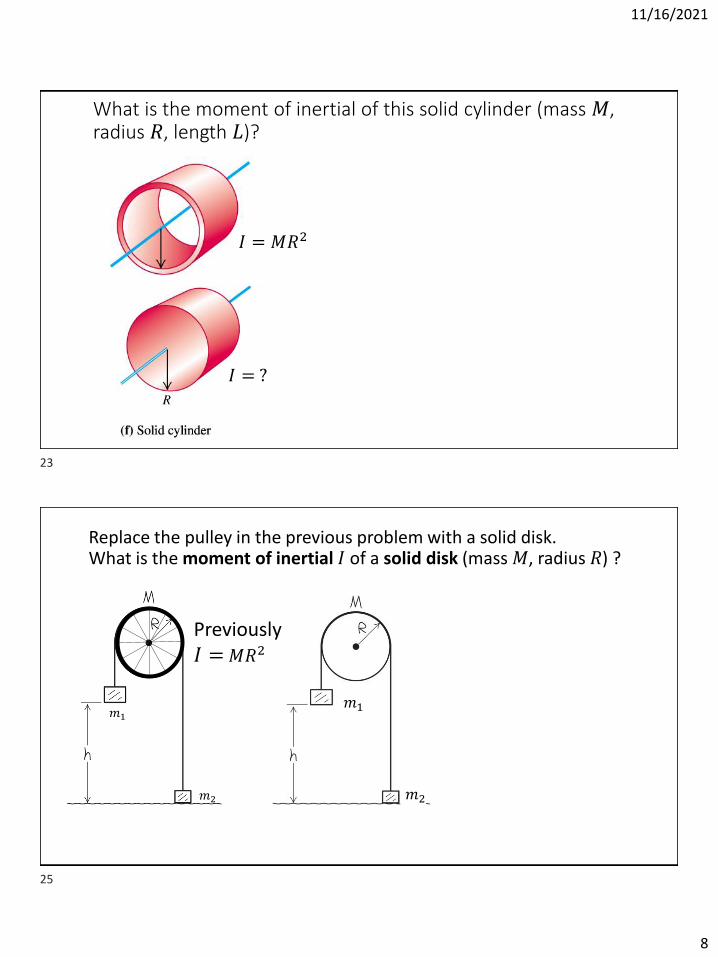
What is the moment of inertial of this solid cylinder (mass 𝑀, radius 𝑅, length 𝐿)?
𝐼 = 𝑀𝑅2
𝐼 = ?
Replace the pulley in the previous problem with a solid disk. What is the moment of inertial 𝐼 of a solid disk (mass 𝑀, radius 𝑅) ?
𝑚1
𝑚2
𝑚1
𝑚2
Previously 𝐼 =𝑀𝑅2
23
25
11/16/2021
9
Overview: Rotational Kinetic Energy
• Use conservation of energy to solve rotational motion problems.• This requires knowing the Kinetic Energy in rotational motion.• Moment of Inertia.• Moment of Inertia depends on the axis of rotation.
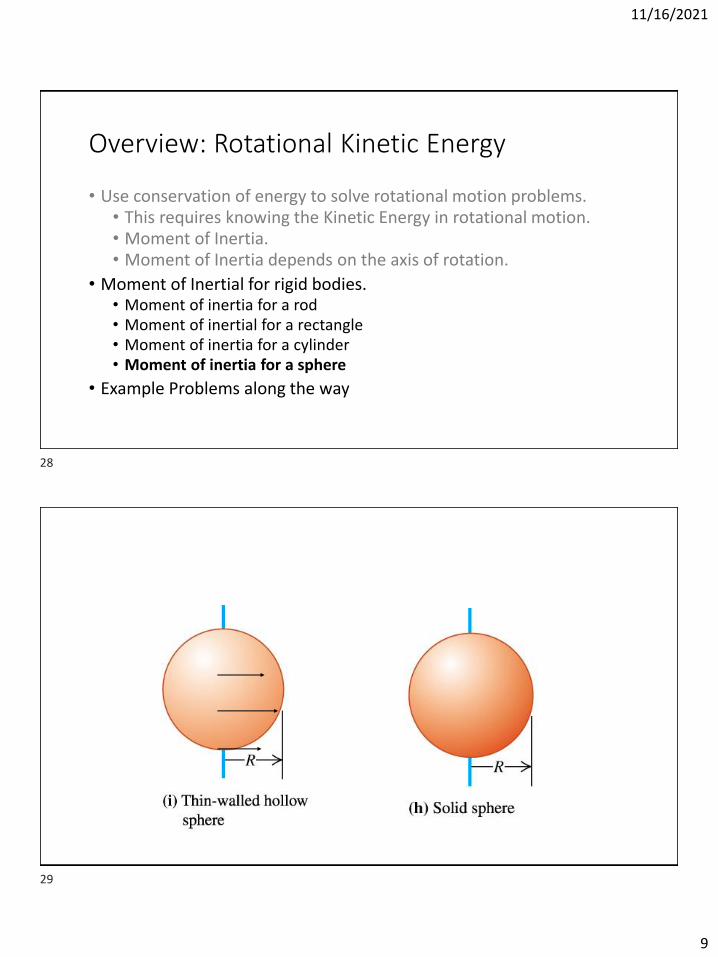
• Moment of Inertial for rigid bodies.• Moment of inertia for a rod• Moment of inertial for a rectangle• Moment of inertia for a cylinder• Moment of inertia for a sphere
• Example Problems along the way
28
29
11/16/2021
10
Torque: concepts (magnitudes only) and mathematics (vectors)
30
31
11/16/2021
11
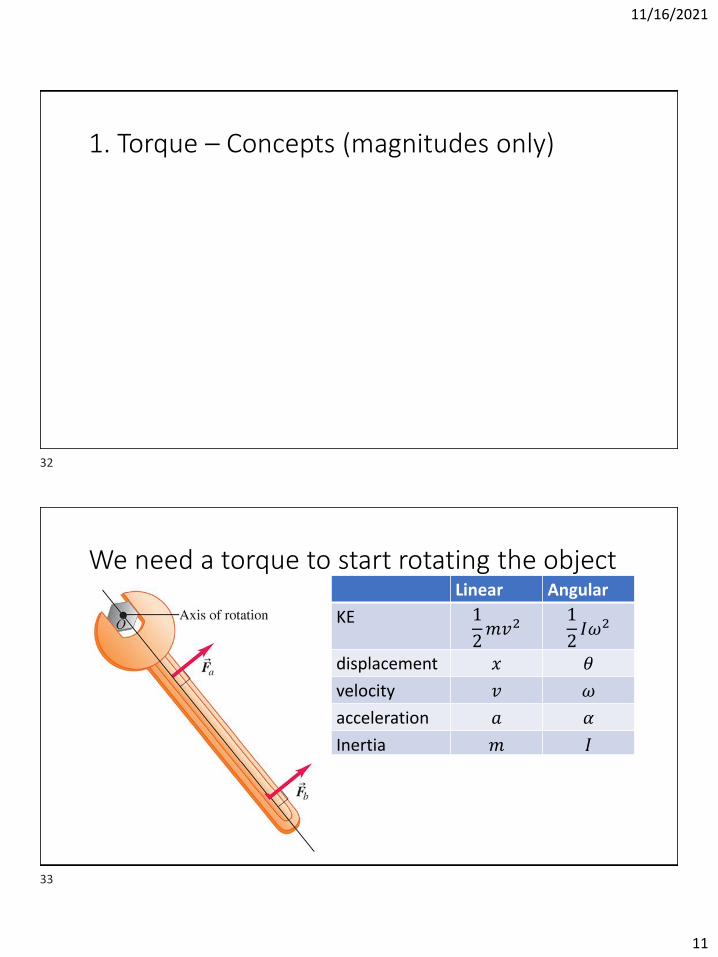
1. Torque – Concepts (magnitudes only)
We need a torque to start rotating the objectLinear Angular
KE 1
2𝑚𝑣2
1
2𝐼𝜔2
displacement 𝑥 𝜃
velocity 𝑣 𝜔
acceleration 𝑎 𝛼
Inertia 𝑚 𝐼
Force Torque
𝐹 𝜏
32
33

11/16/2021
12
Definition of torque 𝜏
𝑟𝑏
𝑟𝑎
Same force Ԧ𝐹 applied at two different locations yield different torques
Easier to rotate the nut when the force is applied at 𝑟𝑏 than at 𝑟𝑎
Applied force here is perpendicular to 𝑟𝑏 and 𝑟𝑏.
Magnitudes only:
Definition of torque 𝜏
Ԧ𝑟
𝜃Ԧ𝐹
The radial component 𝐹 cos 𝜃 does not rotate the wrench/nut. Only the tangential component of the force 𝐹 sin 𝜃 does rotate it.
𝐹 sin 𝜃
𝐹 cos 𝜃
When Ԧ𝐹 is not perpendicular to Ԧ𝑟
34
35
11/16/2021
13
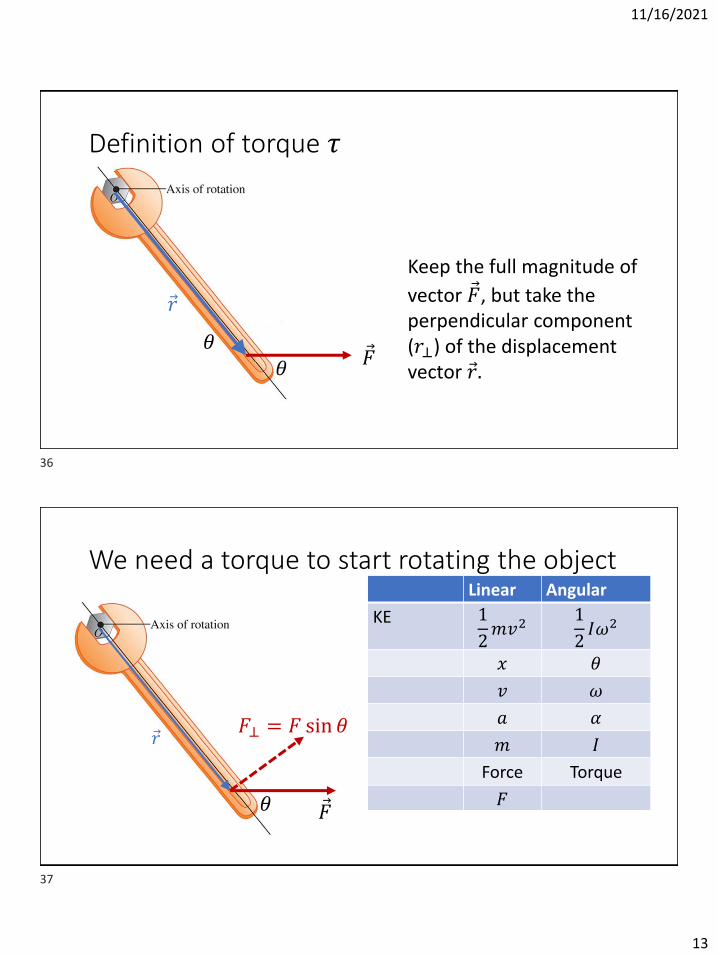
Definition of torque 𝜏
Ԧ𝑟
𝜃Ԧ𝐹
𝜃
Keep the full magnitude of
vector Ԧ𝐹, but take the perpendicular component (𝑟⊥) of the displacement vector Ԧ𝑟.
We need a torque to start rotating the objectLinear Angular
KE 1
2𝑚𝑣2
1
2𝐼𝜔2
𝑥 𝜃
𝑣 𝜔
𝑎 𝛼
𝑚 𝐼
Force Torque
𝐹
Newton’s Law
𝐹 = 𝑚𝑎
Ԧ𝑟
𝜃 Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
36
37
11/16/2021
14
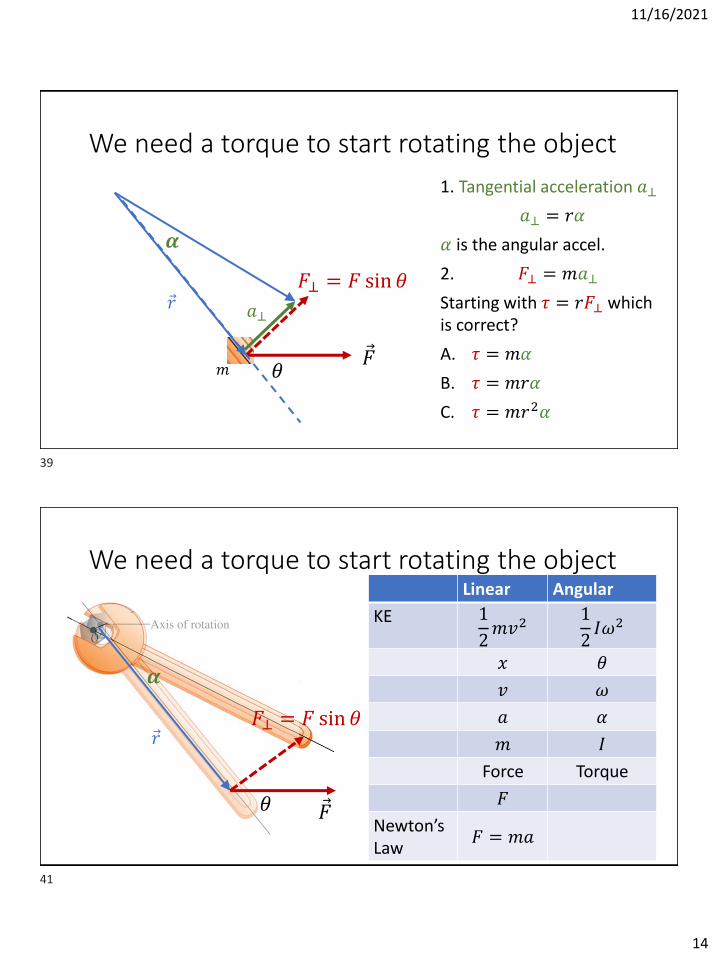
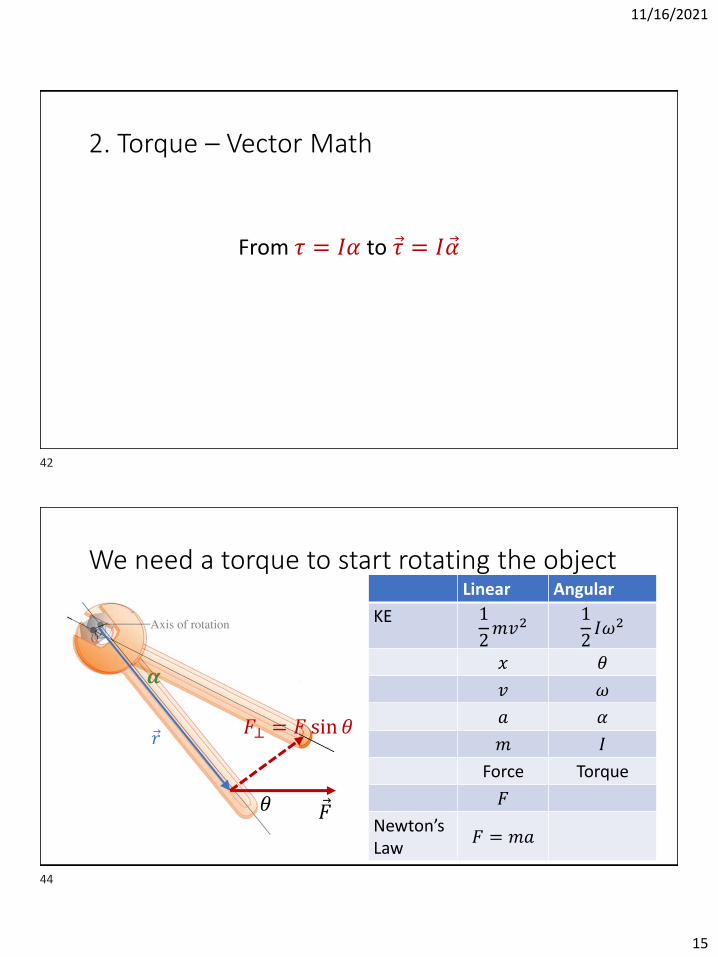
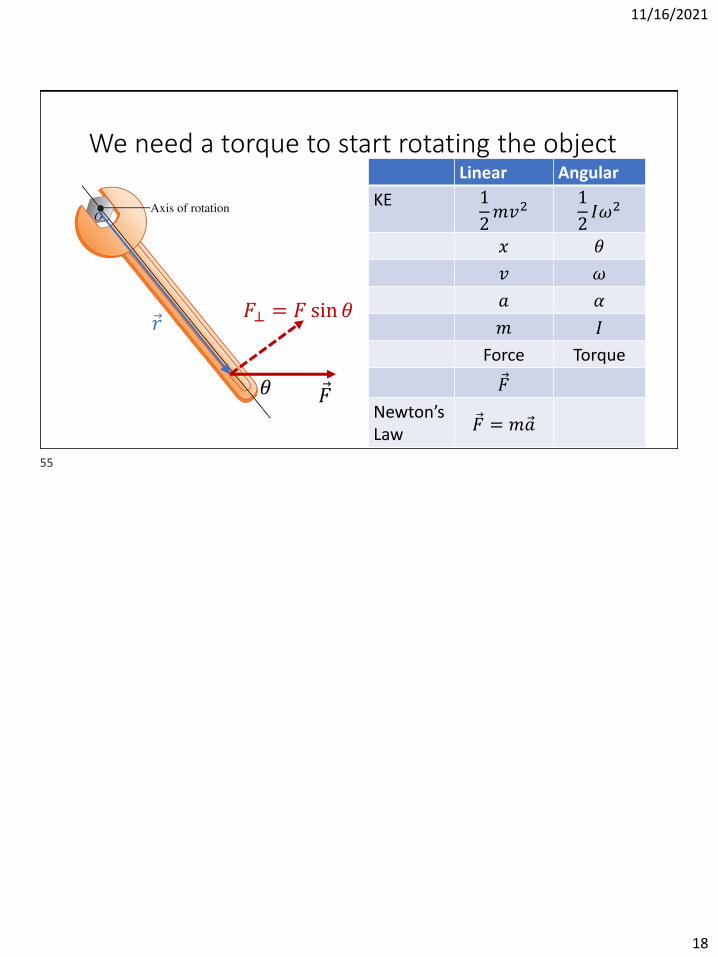
We need a torque to start rotating the object
1. Tangential acceleration 𝑎⊥
𝑎⊥ = 𝑟𝛼
𝛼 is the angular accel.
2. 𝐹⊥ = 𝑚𝑎⊥
Starting with 𝜏 = 𝑟𝐹⊥ which is correct?
A. 𝜏 = 𝑚𝛼
B. 𝜏 = 𝑚𝑟𝛼
C. 𝜏 = 𝑚𝑟2𝛼
Ԧ𝑟
𝜃Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
𝑎⊥
𝜶
𝑚
We need a torque to start rotating the objectLinear Angular
KE 1
2𝑚𝑣2
1
2𝐼𝜔2
𝑥 𝜃
𝑣 𝜔
𝑎 𝛼
𝑚 𝐼
Force Torque
𝐹
Newton’s Law
𝐹 = 𝑚𝑎
Ԧ𝑟
𝜃 Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
𝜶
39
41
11/16/2021
15
2. Torque – Vector Math
From 𝜏 = 𝐼𝛼 to Ԧ𝜏 = 𝐼 Ԧ𝛼
We need a torque to start rotating the objectLinear Angular
KE 1
2𝑚𝑣2
1
2𝐼𝜔2
𝑥 𝜃
𝑣 𝜔
𝑎 𝛼
𝑚 𝐼
Force Torque
𝐹
Newton’s Law
𝐹 = 𝑚𝑎
Ԧ𝑟
𝜃 Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
𝜶
42
44
11/16/2021
16
𝜃
𝑥
𝑦
𝑧
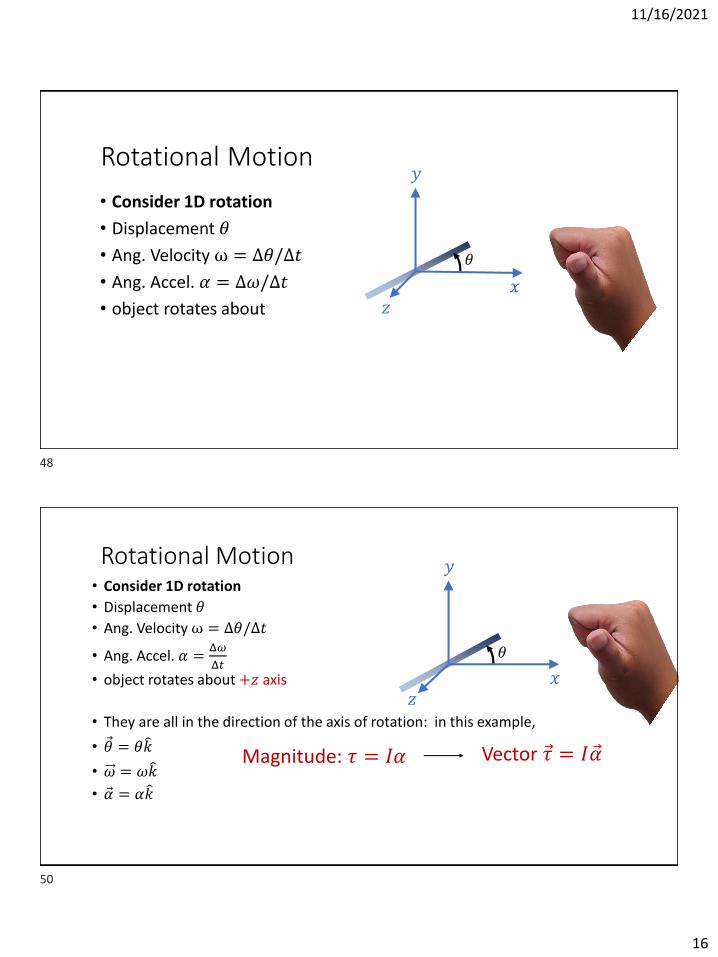
• Consider 1D rotation
• Displacement 𝜃
• Ang. Velocity ω = Δ𝜃/Δ𝑡
• Ang. Accel. 𝛼 = Δ𝜔/Δ𝑡
• object rotates about
Rotational Motion
• Consider 1D rotation
• Displacement 𝜃
• Ang. Velocity ω = Δ𝜃/Δ𝑡
• Ang. Accel. 𝛼 =Δ𝜔
Δ𝑡
• object rotates about +𝑧 axis
• They are all in the direction of the axis of rotation: in this example,
• Ԧ𝜃 = 𝜃𝑘
• 𝜔 = 𝜔𝑘
• Ԧ𝛼 = 𝛼𝑘
Rotational Motion
𝜃
𝑥
𝑦
𝑧
Vector Ԧ𝜏 = 𝐼 Ԧ𝛼Magnitude: 𝜏 = 𝐼𝛼
48
50

11/16/2021
17
We need a torque to start rotating the objectLinear Angular
KE 1
2𝑚𝑣2
1
2𝐼𝜔2
𝑥 𝜃
𝑣 𝜔
𝑎 𝛼
𝑚 𝐼
Force Torque
𝐹 𝜏 = 𝑟𝐹 sin𝜃
Newton’s Law
Ԧ𝐹 = 𝑚 Ԧ𝑎
Ԧ𝑟
𝜃 Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
𝜶
We need a torque to start rotating the object
Ԧ𝑟𝜃 Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
Recall
Axis of rotation:+𝒛
Torque, angular accel, velocity, displacement are all in the + 𝒛 direction.
𝝉 = 𝒓𝑭 𝐬𝐢𝐧𝜽 can be rewritten as
𝑥
𝑦
𝑧𝝉 = 𝑟𝐹⊥ = 𝒓𝑭𝐬𝐢𝐧𝜽
52
53
11/16/2021
18
We need a torque to start rotating the objectLinear Angular
KE 1
2𝑚𝑣2
1
2𝐼𝜔2
𝑥 𝜃
𝑣 𝜔
𝑎 𝛼
𝑚 𝐼
Force Torque
Ԧ𝐹
Newton’s Law
Ԧ𝐹 = 𝑚 Ԧ𝑎
Ԧ𝑟
𝜃 Ԧ𝐹
𝐹⊥ = 𝐹 sin 𝜃
55
Top Related