






Languages
Pages
Legal


NICOLAS ES SIS-BRETON
Méthodes du calcul de la prime : Bonus-malus, Réassurance, Système aléatoire à liaisons complètes
Mémoire présenté à la Faculté des études supérieures de l'Université Laval
dans le cadre du programme de maîtrise en mathématiques pour l'obtention du grade de maître ès sciences (M.Sc.)
DÉPARTEMENT DE MATHÉMATIQUES ET DE STATISTIQUE FACULTÉ DES SCIENCES ET GÉNIE
UNIVERSITÉ LAVAL QUÉBEC
2009
© Nicolas Essis-Breton, 2009

11
Résumé
Dans ce mémoire, nous considérons différentes méthodes du calcul de la prime et de révision de la prime. Dans l'introduction, nous examinons d'abord les propriétés souhaitables d'un calcul de la prime ainsi que les différentes méthodes pour déterminer un principe de prime. Nous nous concentrons ensuite sur deux contextes où le principe de prime est déterminé de façon à réviser la prime en fonction de l'expérience de l'assuré. Nous considérons aussi un contexte où les aspects numériques reliés au calcul d'un principe de prime peuvent être analysés. Avec les systèmes bonus-malus, nous présentons une méthode classique de révision de la prime. Puis, après une analyse des principaux produits de réassurance, nous expliquons différentes méthodes numériques pour évaluer la prime. Avec les systèmes aléatoires à liaisons complètes, nous introduisons une approche nouvelle au problème de révision de la prime qui permet de déterminer des principes de prime optimaux dans certaines situations.

111
A vant-propos
Je tiens à remercier M. Léveillé, mon directeur de recherche, qui a su me guider dans cette entreprise formidable qu'est la rédaction d'un mémoire. Je ne saurais trop exprimer ma gratitude pour son encadrement et le support qu'il m'a apporté. Son enthousiasme et sa rigueur pour la recherche m'ont inspiré et continueront de le faire.
À ma femme, Ivana, je tiens à exprimer ma grande reconnaissance. Le soutien qu'elle m'a apporté est inestimable. C'est sans compter qu'elle m'a constamment encouragé. Je lui en serais toujours redevable.
Enfin, je voudrais remercier le Conseil de recherche en sciences naturelles et en génie du Canada et la Chaire en assurance L'Industrielle-Alliance (Université Laval). Par des octrois à mon directeur, ils ont contribué financièrement à ce travail. Je remercie aussi la Chaire en assurance L'Industrielle-Alliance pour la bourse de deuxième cycle qu'elle m'a accordée.

TABLE DES MATIÈRES
Table des matières
Résumé
Avant-propos
Table des matières
Table des figures
Liste des tableaux
1 Introduction
2 Systèmes bonus-malus 2.1 Vue d'ensemble des systèmes bonus-malus 2.2 Description d'un système bonus-malus 2.3 Analyse d'un système bonus-malus
2.3.1 Structure markovienne 2.3.2 Mesures d'efficacité
3 Réassurance 3.1 Principaux produits de réassurance 3.2 Réassurance stop-Ioss ....... .
3.2.1 Résultats les plus importants 3.2.2 Formule récursive . . . . . . . 3.2.3 Approximations........
3.3 Réassurance proportionnelle et non proportionnelle 3.4 Optimalité de certains produits de réassurance .
3.4.1 Optimalité du stop-Ioss ...... . 3.4.2 Optimalité du proportionnel . . . .
3.5 Réassurance dans un contexte économique
4 Systèmes aléatoires à liaisons complètes 4.1 Introduction.... 4.2 Historique..... 4.3 Théorie des SALe
IV
ii
iii
IV
vi
vii
1
6 6 7 9 9
12
19 19 26 26 27 28 32 34
..... 34 36 36
38 38 38 39

TABLE DES MATIÈRES
4.3.1 Nature d'un SALC · 4.3.2 SALC en actuariat
4.4 Exemples ........ . 4.4.1 Contexte et notation 4.4.2 Probabilité de ruine. 4.4.3 Distribution du temps de la ruine 4.4.4 Espérance du moment de la ruine en cas de ruine 4.4.5 Fonctions de répartition du surplus 4.4.6 Espérances et écart-types
4.5 Comparaison .......... .
5 Conclusion
Bibliographie
v
39 41 44 44 46 47 47 49 50 54
56
59

TABLE DES FIGURES VI
Table des figures
3.1 Fonction de répartition exacte et obtenue par approximation 31
4.1 Fonction de répartition du surplus pour BI . 50 4.2 Fonction de répartition du surplus pour B2. . 51 4.3 Fonction de répartition du surplus pour B3. . 51 4.4 Fonction de répartition du surplus pour B4 . 52 4.5 Fonction de répartition du surplus pour B5 .. 52 4.6 Évolution de E ((i) et E (Çi) pour B3 .... 53 4.7 Évolution de JVar((i) et JVar(çJ pour B3 .. 53 4.8 Évolution de E (IIi), E (Si) et E (Ri) pour B3 . 54 4.9 Évolution de JVar (IIi), JVar (Si) et JVar (Ri) pour B3 54

LISTE DES TABLEAUX vu
Liste des tableaux
2.1 Classe attribuée selon le nombre de points d 'inaptitude 9 2.2 Classe attribuée après k réclamations . . . . . . . . . . 10 2.3 c', b' et NSRE pour le système de la Thaïlande . . . . 15 2.4 Coefficient de variation de la prime de l'assuré pour le système de la Thailande 1 7 2.5 Stationnarité et variation totale moyenne pour le système de la Thailande . 18
3.1 Paramètres des contrats de réassurance . . . . . . . . . . . . . . . . . 3.2 Écart relatif entre les contextes sans réassurance et avec réassurance . 3.3 Caractéristiques du portefeuille S . . . . . . . . . . 3.4 Paramètres des différentes approximations 3.5 Écart relatif avec la prime stop-loss exacte
4.1 Notation pour les cinq cas étudiés .. 4.2 Paramètres pour les cinq cas étudiés 4.3 Probabilité de ruine. . . . . . . . . . . . 4.4 Distribution du temps de la ruine . . . 4.5 Espérance et écart-type du moment de la ruine 4.6 Espérance et écart-type de la sévérité de la ruine.
23 25 30 31 33
45 45 46 48 49 49

1
Chapitre 1
Introduction
La prime chargée par un assureur permet aux assurés de bénéficier d'une couverture d'assurance contre un risque financier. Le montant de cette prime dépend de nombreux facteurs. Dans ce mémoire, nous présentons différentes méthodes et différents contextes où la théorie du risque aide à la modélisation de certains facteurs et ultimement à la détermination de la prime. Pour ce faire, nous nous concentrerons principalement sur les systèmes bonusmalus, la réassurance et les systèmes aléatoires à liaisons complètes. Avant de présenter le contenu de ces chapitres, nous discutons de ce qu'est un principe de prime, des propriétés désirables qu'il peut posséder, et présentons certains principes de primes importants. Cette discussion préliminaire soutient le contenu des chapitres où nous pourrons nous concentrer sur le calcul de la prime en tant que tel et son ajustement en fonction du contexte. Le lecteur souhaitant obtenir plus de détails sur ce sujet peut se référer à Goovaerts et autres [18], Kaas et autres [24].
Nous notons par II (X) la prime chargée par l'assureur pour couvrir le risque X. Toute règle qui permet d'associer à un risque X, une prime II (X) est appelée un principe de prime. Les propriétés suivantes sont des propriétés désirables pour un principe de prime. La liste n'est pas exhaustive, mais n'en présente pas moins les propriétés les plus importantes en pratique.
1 Marge de sécurité positive: II (X) ~ lE (X) Cette propriété exige que la prime soit supérieure ou égale au montant espéré des réclamations. Un principe de prime qui ne respecte pas cette propriété conduit l'assureur avec certitude à la ruine.
2 Additivité: II (X + Y) = II (X) + II (Y) Si X et Y sont des variables aléatoires indépendantes, cette propriété spécifie que la prime pour le risque combiné II (X + Y) doit être égale à la somme des primes individuelles II (X) et II (Y). Cette propriété garantit qu'il n'y a aucune différence entre assurer la totalité des risques ou répartir la couverture sur plusieurs contrats.
3 Proportionnalité: pour toute constante a ~ 0, II (aX) = aIl (X) Si le montant des réclamations subit un changement d'échelle, à cause de l'inflation par exemple, cette propriété spécifie que la prime pour le nouveau risque aX est proportionnelle à la prime du risque de base II (X). Cette propriété garantit à l'assureur le même

2
niveau de profitabilité en cas de changement d'échelle du montant des réclamations.
4 Cohérence: pour toute constante a 2 0, II (X + a) == II (X) + a Si le montant de toutes réclamations est augmenté de a, à cause d'une taxe à l'émission du contrat par exemple, cette propriété spécifie que la prime de base II (X ) est augmentée de a. Cette propriété garantit que le principe de prime donne un résultat logique face à de nouveaux coûts fixes par contrat.
5 Plafonnement: II (X) ~ X m où X m == max Dom (X) Si le montant maximal de réclamation est X m , cette propriété spécifie que la prime ne dépasse pas ce montant maximal. Dans le cas contraire, il n'y aurait aucune raison pour l'assuré de souscrire à la couverture d'assurance.
Lors du choix d'un principe de prime, les propriétés qu'il possède sont déterminantes. En effet, il n'existe malheureusement pas de principe de prime qui satisfasse à toutes les propriétés. C'est le contexte qui dicte les propriétés requises pour le principe de prime. Toutefois, plusieurs tentatives ont été faites pour créer un principe de prime qui satisfasse au plus grand nombre de propriétés. Nous présentons maintenant les plus importants.
A - Principe de la prime nette: II (X) == E (X) La prime est égale au montant espéré des réclamations. Ce principe est attrayant du fait qu'il est simple à utiliser. Cependant, il n'inclut aucune marge de sécurité et ne peut donc être utilisé pour établir la prime finale. Ce principe reste tout de même intéressant pour donner une idée de la prime de par sa simplicité. En plus, il respecte toutes les autres propriétés'.
B - Principe de la valeur espérée : II (X) == (1 + e) lE (X) ,e > 0
Le montant espéré des réclamations est majoré d'une marge de sécurité elE (X). Ce principe est aussi simple à utiliser. Il est très utile en théorie du risque pour déterminer des bornes sur la probabilité de ruine. En pratique, l'inconvénient majeur de ce principe est qu'il alloue la n1ême marge aux risques qui ont le même montant espéré. Par exemple, soit X et Y des variables aléatoires tel que
Pr (X = 10)
Pr (Y == 0) Pr (X == 20) == 1/2,
Pr (Y == 30) == 1/2.
Les risques X et Y ont la même espérance, mais charger la même prime pour ces deux risques n'est pas prudent puisque la variance de Y est beaucoup plus grande (450 vs 50). Les deux prochains principes tentent de remédier à cet inconvénient.
Ce principe ajoute une marge de sécurité positive, est additif et proportionnel. Cependant il n'est pas cohérent, ni plafonné,
C - Principe de la variance: II (X) == lE (X) + eVar (X) ,e > 0
Ce principe modifie le principe de la valeur espérée en faisant dépendre la majoration de la variance du risque. Cette modification pern1et de donner une prime différente à des risques qui n'ont pas la même variance. Ce principe a aussi' l'avantage d'être cohérent. Cependant, il n'est pas proportionnel puisque

II (aX) lE (aX) ~ eVar (aX)
aIE (X) + ea2Var (X)
-# aIT (X).
3
Il n'est pas plafonné non plus, car pour une certaine valeur de e, il est possible d'avoir II (X) > Xm.
D - Principe de l'écart-type: II (X) = lE (X) + eJVar (X), e > 0 Ce principe est inspiré du principe de la valeur espérée et du principe de la variance. Ceci lui permet de bénéficier des avantages de chacun. En effet, ce principe donne une prime différente à des risques qui n'ont pas la même variance, en plus d'être proportionnel. Cependant, il n'est pas additif, car les écarts-types ne s'additionnent pas. Pour les mêmes raisons que pour le principe de la variance, ce principe n'est pas plafonné.
E - Principe de l'utilité équivalente: u (w) = E (u (w - X + II (X))) Soit u la fonction d'utilité de l'assureur et w son surplus initial. Ce principe établi la prime comme le montant minimal que l'assureur doit charger, conformément à son aversion au risque, pour offrir la couverture. Ce principe inclut une marge de sécurité positive puisque, avec l'inégalité de Jensen
u (w) = E (u (w - X + IT (X))) ~ u (w - X + II (X)) .
Le principe est cohérent et plafonné, cependant, il n'est pas additif ni proportionnel.
F - Principe exponentiel: II (X) = ~ ln lE (exp (f3X)) ,f3 > 0 Ce principe découle du principe de l'utilité équivalente lorsque la fonction d'utilité u est exponentielle, i.e. u = - exp ( - f3x ) ,f3 > O. Ce principe possède la propriété de ne pas dépendre du surplus initial. Il est aussi proportionnel puisque
II (X + Y) 1 :a ln lE (exp (8 (X + Y)))
1 - ln lE (exp (,oX) exp (f3Y)) f3 . 1 1 :B ln lE (exp (/3X)) + :Bln lE (exp (f3Y))
fI (X) + II (Y) .
Cependant, comme le principe de l'utilité équivalente, il n'est pas additif.
G - Principe d'Esscher : II (X) = lE (X ehX) lIE (e hX
)
Ce principe découle du principe de l'utilité exponentiel. Il survient lorsque l'assureur vise à optimiser son utilité selon le principe de l'utilité équivalente
Inax u (w) - hE (u (w - X + II (X))) ,h > O. TI

4
Ce principe peut aussi être vu comme une pondération du risque où plus de poids est donné aux évènements extrêmes.
Il possède l'avantage d'être additif. Cependant, il n'est pas proportionnel puisque
II (aX) aIE (X ehaX) lIE (e haX
)
i- aIE (X ehX) lIE (e hX
) .
Bülhman dérive ce principe de façon économique en [11] et [12].
H - Principe du risque ajusté: II (X) = Jooo Sx (t)C dt, 0 < c < 1
où S x = 1 - F x est la fonction de survie du risque X. Ce principe est semblable au principe d'Esscher en ce sens qu'il produit aussi une pondération du risque où plus de poids est donné aux évènements extrêmes. Contrairement au principe d'Esscher, il t
proportionnel, mais pas additif puisque
II (X + Y) = 100
Sx+Y (t)C dt
#- 100
Sx (tt dt + 100
Sy (tt dt.
Ce principe possède toutes les autres propriétés.
La list,e de propriétés désirables pour un principe de prime et la liste des principes de prime, nous permettent de choisir un principe de prime de deux façons (Young [50)). Soit nous adoptons un principe de prime, puis nous analysons les propriétés qu'il possède. Soit nous déterminons une liste de propriétés désirables puis nous adoptons le principe de prime dont les propriétés s'approchent le plus de cette liste. Une troisième façon, dite économique, consiste à modéliser le contexte associé au problème étudié puis à en déduire un principe de prime. Par exemple, en assurance automobile, le problème consiste à attribuer à chaque assuré la bonne classe de tarif. Une des solutions classiques consiste à utiliser un système bonus-malus, dont le principe de prime implicite est de faire dépendre la marge de sécurité de l'expérience de l'assuré.
Dans ce mémoire, avec les systèmes bonus-malus et les systèmes aléatoires à liaisons complètes, nous présentons plus en détail deux contextes où le principe de prime est déterminé de façon économique. Avec la réassurance nous présentons les aspects numériques reliés au calcul d'un principe de prime.
Dans le chapitre sur les systèmes bonus-malus, nous considérons une approche classique au problème de révision de la prime. Dans le cadre de ces systèmes, l'accent est mis sur une modélisation adéquate des réclamations individuelles qui permet d'offrir la meilleure prime tout en maintenant un niveau raisonnable pour la probabilité de ruine. De par leur prise en compte de l'expérience de l'assuré et un ensemble de mesures d'efficacité permettant d'évaluer la santé financière du système, les systèmes bonus-malus parviennent à atteindre ces buts.
Dans le chapitre sur la réassurance, nous analysons les principaux produits de réassurance et considérons les facteurs qui influencent le choix de la forme du contrat. Même si certains

5
contrats sont plus optimaux que d'autres, la cédante peut opter pour un contrat moins onéreux du moment qu'il maintient une probabilité de ruine raisonnable. Nous abordons ensuite les différentes méthodes de calcul et d'approximation de la valeur d'un contrat de réassurance. En effet, la complexité de la distribution de probabilité des contrats de réassurance doit être surmontée afin de pouvoir obtenir la prime.
Dans le chapitre sur les systèmes aléatoires à liaisons complètes, nous considérons une approche nouvelle au problème de révision de la prime. Les systèmes aléatoires à liaisons complètes offrent un modèle qui explicite la relation entre la distribution des réclamations et le processus de révision de la prime. En analysant la probabilité de ruine, il est possible de déterminer des règles de décisions optimales pour le niveau de prime, et des situations optimales pour la dépendance entre le niveau de prime et la distribution des réclamations.

,-----------------~----------------------------------~ - - - ---- ---~-~-
6
Chapitre 2
Systèmes bonus-malus
2.1 Vue d'ensemble des systèmes bonus-malus
Les premiers systèmes bonus-malus furent utilisés en assurance automobile et remontent à aussi loin qu'en 1910 en Angleterre, suivi de près par le Canada en 1930 (Lemaire [29)) . Ces systèmes accordaient une réduction de 10 % par exemple, en cas d'une année passée saris réclamation. En cas de réclamation, aucune pénalité n'était appliquée.
Depuis ce temps, les systèmes bonus-malus ont beaucoup évolué et une théorie fondée sur les chaînes de Nlarkov a permis de mieux les analyser. Leur principal avantage est d'offrir un moyen simple de tenir compte de variables de tarification à posteriori, tout en récompensant les assurés qui conduisent prudemment.
Les systèmes bonus-malus sont surtout utilisés en assurance automobile car il est généralement reconnu qu'un conducteur a un certain contrôle sur son nombre d'accidents. C'est pour ce domaine que la théorie a été le plus développée et a acquis sa terminologie. Le principe des bonus-malus se retrouve aussi, entre autres, en réassurance et en assurance collective. La théorie de la tarification par l'expérience et la théorie de la crédibilité, tout comme les bonus-malus, visent à tenir compte de variables à posteriori. Les deux précédents domaines ayant leurs propres saveurs théoriques, ils ne seront pas abordés ici.
À travers le monde, soit les systèn1es bonus-malus sont imposés par le gouvernement, soit le marché est complètement libre. Lorsqu'ils sont imposés par le gouvernement, tous les assureurs doivent adopter le même système. Tandis que lorsque le marché est complètement libre chaque assureur construit son propre système. En Europe, une loi sur le libre marché est en cours d'application, tandis que dans les pays asiatiques les bonus-malus sont généralement réglementés par le gouvernement (Lemaire [30]). En An1érique, les deux types se retrouvent. Dans le cas particulier du Québec, la SAAQI utilise un système semblabe au bonus-malus pour pénaliser les infractions au code de la route. La configuration des systèmes varie aussi à travers le monde. Certains sont très simples et ne tiennent compte que du nombre de réclamations, tandis que d'autres tiennent aussi compte de la sévérité des accidents, de la possibilité de non augmentation de la prime et de la possibilité de couverture gratuite (Lemaire [29], [30)).
l Société de l 'Assurance Automobile du Québec

~----------~ ---~--~--- -- -~ -- -- -
2.2. DESCRiPTION D'UN SYSTÈME BONUS-MALUS 7
Dans ce chapitre, nous analyserons les systèmes bonus-malus à partir du concept de système de tarification. Cette présentation offre un cadre mathématique rigoureux qui permet de synthétiser les notions essentielles de la théorie. Dans la section (2.2) nous précisons la terminologie et les définitions utilisées dans la section (2.3) pour l'analyse théorique. La structure markovienne d'un système bonus-malus est analysée dans la section (2.3.1 ) et un ensemble de mesure d'efficacité du système est défini en (2.3.2). Un fait notable de la présentation, de par l'utilisation du cadre mathématique des systèmes de tarificat ion, st le recours à la notion de règle de décision et l'obtention d 'une classification cohérente des mesures d'efficacité.
2.2 Description d'un système bonus-malus
En assurance automobile, un assureur doit établir un système de tarification de sorte à être compétitif tout en contrôlant le risque qu'il assume. Soit (Xt)tE N le risque à tarifer et (Ct)t EN la classe de tarif d'un risque. Muni de cette notation, nous allons préciser la terminologie.
Définition 1 (Classe de tarif) Une classe de tarif Ct détermine la prime à être chargée au temps t pour assumer le risque encouru dans la période [t, t + 1]. Le processus (Ct )tEN représente l 'évolution de la classe de tarif d 'un risque dans le temps.
Il est généralement supposé que (Xt\ EN est indépendant de (Ct)t EN ' i.e. que le risque ne dépend pas de la classe de tarif. Nous adopterons aussi cette hypothèse. Cependant, la classe de tarif dépend du risque comme le requiert tout système de tarification.
Définition 2 (Système de tarification) Un système de tarification est une règle de décision u (indépendante du temps) qui permet, au temps t, d 'associer une classe de tarif Ct au risque X t +1 à couvrir dans la prochaine période [t,t + 1].
La définition précédente est largen1ent inspirée de Krahnen ([25]). Dans le contexte des bonus-malus, la règle de décision u d'un système de tarification définit la classe de tarif Ct à partir de variables de tarification. Ce que nous noterons par
Ct == u (variables de tarification) .
Les variables de tarification dépendent du risque à tarifer et peuvent être classées en deux catégories.
Définition 3 (Variable de tarification à priori) Variable de tarification dont la valeur est connue avant que le risque soit observé, i. e. si (At)t EN est une variable de tarification à
priori pour le risque (Xt) tENJ alors
At est connue avant que X t+1 soit observé, Yt EN.

2.2. DESCRIPTION D'UN SYSTÈME BONUS-MALUS 8
Définition 4 (Variable de tarification à posteriori) Variable de tarification dont la valeur est connue après que le risque soit observé, i. e. si (Yt)tEN est une variable de tarification à posteriori pour le risque (Xt)tE N' alors
Yt+l est connue une fois X t+1 observé, Yt EN.
Des exemples de variables à priori sont l'âge, le sexe, le ,type de voiture, le lieu d'habitation . . Pour les variables à posteriori, le nombre de réclamations, le nombre d'accidents responsables, ou le nombre d'infractions au code de la route, sont des exemples. Des études comme celle de Lemaire, [27], montrent que les variables à posteriori sont de bien meilleurs prédicateurs pour l'estimation du risque comparativement aux variables à priori. C'est pourquoi il est crucial que la règle de décision u d 'un système de tarification incorpore des variables à posteriori dans son design. Un système bonus-malus définit Yt comme le nombre d'accidents responsables et At comme la classe de tarif de la période précédente.
Définition 5 (Système bonus-malus) (i) Un système bonus-malus est un système de tarification où en début de période un risque est classé dans la classe de tarif Ct . En fin de période, le risque est classé dans la classe Ct + 1, d 'après la règle de décision u . La règle de décision u détermine la classe de tarif Ct + 1 en fonction de la · classe de tarif Ct et du nombre d'accidents responsables observé Yt+l de la période précédente
(2.1)
À t == 0, la valeur de Co est fixé à io'
(ii) les classe de tarif (Ct )tEN peuvent prendre . leur valeur parmi l classes possibles. La classe 1 accorde le plus grand bonus, tandis que la classe l accorde le plus grand malus.
(iii) À la i-ième classe de tarif correspond un pourcentage d 'une prime de base bi tel que bl S b2 S ... S bl .
Dans un système bonus-malus, les variables à priori mentionnées plus haut, comme l'âge ou le type de voiture, sont utilisées pour déterminer la prime de base d'un nouvel assuré. La prime accordée par la classe i correspond ainsi à la prime de base multipliée par le niveau de prime bi.
Le système bonus-malus classique, présenté dans la définition précédente, peut être généralisé en modifiant la règle de décision u. Par exen1ple, en plus du nombre d'accidents responsables observé Yt+l, nous pourrions aussi faire dépendre les classes de tarifs du type d'accident ~~1 tel que
Exemple 6 (Système bonus-malus de la SAAQ) Au Québec, la SAAQ utilise un système de points d'inaptitude basé sur la gravité relative des infractions au code de la route. Par exemple, brûler un feu rouge entraîne 3 points d 'inaptitude, tandis qu 'un excès de vitesse, de 100km sur la limite prescrite, entraîne 12 points d 'inaptitude. Ces points sont inscrits au dossier du conducteur pour une période de deux ans. Le système bonus-malus tel que présenté dans ([46 j) possède 5 classes (voir le tableau 2.1).

2.3. ANALYSE D'UN SYSTÈME BONUS-NIALUS 9
Ce système n'est pas un bonus-malus traditionel du f ait que les classes sont définies d'après la gravité relative des infractions au code de la route, plutôt que du nombre d'infractions au code de la route. Cependant, le système n'en demeure pas moins un système bonus-malus en tant que tel et constitue un exemple d'un système où les infractions mineures n'entraînent pas les mêmes sanctions que les infractions majeures. E n ce sens, le système de la SAA Q corrige un des déf auts des systèmes bonus-malus que plusieurs auteurs ont relevés (Lemaire [30]).
Classe P oints d' inaptitude Niveau de prime 5 > 15 796 % 4 [12, 14] 572 % 3 [8, Il] 348 % 2 [4 , 7] 200 % 1 [0,3] 100 %
T AB . 2.1 - Classe attribuée selon le nombre de points d' inaptit ude
Remarque 7 Le système bonus-malus de la SAAQ entre dans le cadre des systèmes alétaoires à liaisons complètes (SA L C) car il garde un historique du moment où sont inscrits les points au dossier. N ous appronf ondirons plus en détails ces systèmes dans le chapitre sur les SA L C.
Exemple 8 (Système bonus-malus classique) Le systèm e bonus-malus de la Thaïlande, tel que présenté dans !28), constitue un exemple représentatif d 'un système bonus-malus clas-sique. Il possède 7 classes avec un niveau de prime (bl , ... , b7 ) = (60 %,70 %,80 %, 100 %,120 %,130 %, 140 et la classe de départ Co = 4 . La règle de transition est
{
min( 1 ,i - :~k =O etl~i~7
( . k) = 4, k - 1 et 'l < 4 u 'l, 5, k ~ 2 et i < 4
mi n (7, i + 1) , k -::J 0 et i 2 4
Ceci est représenté de f açon compacte dans le tableau (2 .2) .
2.3 Analyse d'un système bonus-malus
2.3.1 Structure markovienne
Il est généralement supposé que (Yt)tEN forme une suite de variables aléatoires indépendantes et identiquement distribuées. Ceci revient à assumer que les habiletés de conduite d'un assuré ne changent pas dans le temps, i.e. que les conduct eurs n'apprennent pas de leurs expériences. Nous poserons aussi cette hypothèse. Comnle nous le verrons à la remarque (31) les systèmes bonus-malus possèdent un mécanisme pour compenser les lacunes de cette hypothèse.

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS 10
Classe Niveau de prime k=O k=l k?2 7 140 6 7 7 6 130 5 7 7 5 120 4 6 6 4 100 3 5 5 3 80 2 4 5 2 70 1 4 5 1 60 1 4 5
TAB. 2.2 - Classe attribuée après k réclamations
Proposition 9 (Chaîne de Markov de la classe de tarif) Le processus de classe de ta
rif (Ct)tE N forme une chaîne de Markov homogène.
Preuve. Soit it la valeur prise par la classe de tarif au temps t. Avec (2.1) nous obtenons
Pr (Ct+1 = it+1lCt = it, ... , Co = io)
Pr (u (it, Yt+1) = it+1lu (it-1, Yt) = it, ... , Co = io)
Pr ( u (it, Yt+ 1) = it+ 1 )
Pr (u (it, Yt+1) = it+1lCt = it) = Pr (Ct+1 = i t+1!Ct = it) .
(2.2)
En (2.2) nous utilisons le fait que les variables Co, ... , Ct définies par Yi, ... , Yt sont indépendantes de u (it, Yt+1). La probabilité conditionnelle Pr (Ct+1 = i t +1 lCt = it) donnée par Pr (u (it, Yt+ 1) = it+ 1) ne dépend pas de la classe de tarif Ct puisque les Yt sont identiquement distribuées. Donc le processus de classe de tarif (Ct)tEN forme une chaîne de Markov hon10gène. _
Remarque 10 (Équation stochastique récursive) L 'équation (2.1) peut être vU,e comme une équation stochastique récursive et, comme il est souligné dans Rolski et autres [41 j, le processus (Ct)tE N forme alors automatiquement une chaîne de Markov. La preuve utilisée ci-haut est d'ailleurs celle prése'ntée dans la référence précédente.
Soit {Pk} kE N la distribution de probabilité commune à la suite (Yt )tEN' nous pouvons obtenir la matrice de transition Q associée à (Ct)tEN en considérant chacun des éléments qij
tel que Q = (qij) i, j=l ,,,.,l.
Proposition Il (Probabilités de transition de la classe de tarif) La probabilité de transition qij de passer de la classe i à la classe j est donnée par
LPk1j (u (i, k)) . k=O

2.3. ANALYSE D'UN SYSTÈNIE BONUS-MALUS Il
Preuve. Comme (Ct)tE N forme une chaîne de Markov, avec (2.1), nous obtenons le résultat
•
qij Pr (Ct+1 == jlCt == i) Pr ( u ( i, Yt) == j 1 Ct == i)
E (1 j (u (i, Yt+ 1) )) .
Remarque 12 La quantité Ij (u (i, k)) est parfois notée comme une règle de transition t ij (k)
{
1, si la police passe de la classe i à la classe j tij (k) == lorsque k réclamations surviennent .
0, autrement
Ceci permet de former une matrice de transition T (k) == (tij (k))i,j=l, ... ,l' T (k) est une matrice 0-1 ayant exactement un 1 dans chaque ligne. La notation Ij (u (i, k)) facilit e l'analyse comme nous l'avons vu à la proposition (9). Tandis que la notation t ij (k) facilit e la présentation de la règle de décision comme nous l 'avons vu dans les exemples (6) et (8). Les tableaux récapitulatifs de ces exemples correspondent en effet à la matrice T (k) représentée de façon compacte. Le choix de l'une où l'autre des notations dépend du contexte.
En pratique, il est généralement supposé que le nombre d'accidents responsables Yt suit une loi de Poisson avec intensité aléatoire A (Lemaire [28]). La distribution de A est définie par sa fonction de densité g appelée fonction de structure. Le choix classique pour la distribution de A est une distribution Gamma. La fréquence des réclamations suit alors une loi Binomiale Négative
Lemma 13 Si Y V'"I Poisson( A) où A V'"I r ( Œ, (3) avec
alors Yt ~ Binomiale Négative ( Cf, 1!/3 )' Preuve. En conditionnant sur A, nous pouvons utiliser la fonction génératrice des probabilités d'une loi de Poisson
E (E (ysIA))
E ( exp (A (s - 1))) .
En reconnaissant la dernière égalité comme la fonction génératrice des n10ments de A, nous obtenons la fonction génératrice des moments d'une loi Binomiale Négative
(1 - /3 (s - 1)) -Q
( 1 ) Q ( (3 )-Q
1+ /3 1- 1+ f3 s

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS 12
-Avec la proposition (11) et le lemme (13) nous pouvons calculer qf;), la probabilité de passer de la classe i à la classe j en n périodes, en multipliant la matrice Q par elle-même n fois. Pour analyser le comportement asymptotique de la classe de tarif, nous utilisons la notion de communication entre les classes i.e. que la classe i communique avec la classe j si 3 n E N tel que q~n) > 0 (Ross [42]).
Proposition 14 (Ct\EN est une chaîne de Markov ergodique si et seulement si toutes les classes de tarif communiquent entre elles.
Preuve. Si toutes les classes de tarif communiquent entre elles, la matrice de transition Q est irréductible et apériodique, d'où l'ergodicité de la chaîne de Markov (Ct)tEN _
Proposition 15 Si (Ct )tEN est une chaîne de Markov ergodique alors il existe une distribu
tion stationnaire a = (aj)j=l , .. ,P où aj = limn-too qf;) est la solution unique de l'équation
l
a = aQ, Laj = 1. j=l
Preuve. Suit directement de la théorie sur les chaînes de Markov. _
Remarque 16
(i) Pour vérifier que toutes les classes d'une chaîne de Markov communiquent entre elles, une façon simple consiste à faire le graphe de la chaîne de Markov. Si le graphe est fermé, i. e. que tous les états peuvent être rejoint à partir de n'importe quel état de départ, alors tous les états communiquent entre eux. Si ce n'est pas le cas, tous les états ne communiquent pas entre eux, et la chaîne de Marko v n'est pas ergodique.
(ii) Plus de détails sur les notions d'ergodicité, d'irréductibilité et d' apériodicité peuvent être trouvés dans Rolski et autres [41 j. Ces notions y sont introduites en utilisant le concept de matrice régulière. Comme ces concepts ne sont pas directement reliés à notre sujet, nous ne les élaborons pas davantage.
2.3.2 Mesures d'efficacité
L'efficacité d'un système constitue sa capacité à atteindre ses buts. Pour un système de tarification, trois buts distincts sont visés. En premier lieu, de par son influence directe sur les primes chargées, un système de tarification vise à maintenir les réserves de l'assureur à un bon niveau. En même temps, ce but n'est atteint que si le systèn1e estin1e adéquatement le risque encouru par l'assureur. Finalement, les corrections à la prime effectuées par le systènle ne doivent pas être trop sévères sinon le système ne parvient pas à offrir aux assurés une couverture d'assurance qui pourrait les intéresser.
Définition 17 (Efficacité d'un système de tarification) Un système de tarification est efficace s'il entraîne

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS
(i) une stabilité financière du système,
(ii) une estimation adéquate du risque,
(iii) un respect du principe d'assurance de transfert du risque.
13
La définition précédente, ainsi que le reste de cette section, suit le traitement proposé par Lemaire pour analyser l'efficacité d'un système bonus-malus(Lemaire [29], [30)).
Les sections suivantes précisent la définition des éléments sur lesquels reposent l'efficacité d'un système de tarification, et donnent les mesures applicables dans le contexte d'un système bonus-malus. Pour ce faire, nous utiliserons le processus de surplus (Ut)tE N dont voici la définition rigoureuse.
Définition 18 (Surplus dans un systèIl1.e bonus-Illalus) Soit X t +1 le montant des ré
clamations dans la période [t, t + 1], 1r ( Ct) la prime chargée en début de période pour la classe Ct et u le niveau de réserve initial. Avec le niveau de surplus Ut+1 , évalué en fin de période, nous définissons le processus de surplus (Ut)tE N par
t+l
Ut +1 u+ ~1r(Cs) - ~Xs s=O s=l
t t+1
u+ ~1r(U(CS-1,YS)) - ~Xs. s=o 8=1
Sans perte de généralité, nous supposerons que la prime de base est de 1 et que le montant des réclamations est mis à une échelle unitaire. Ceci permet de focaliser l'analyse sur l'impact des niveaux de primes {b j } propre aux systèmes bonus-malus.
l
~ q~~~bj. j=l
1,Vt E N.
Remarque 19 Voici un bref aperçu de la procédure qui même à la calibration d'un système bonus-malus. Dans une première étape les (b j )j=l "" l sont déterminées à l'aide de données et d'outils statistiques. Ensuite, u et (bj ) j=l, .. ,l sont choisies afin d'atteindre un équilibre entre les critères d'efficacité donnés à la définition (17). L'atteinte de l'équilibre entre les critères peut éventuellement demander un rajustement des (b j ) j = l , .. ,z. En [29j, Lemaire dresse un bon exposé de cette démarche. L'exemple détaillé de Denuit, [14j, éclaire aussi par son aspect très concret et orienté vers la pratique.
2.3.2.1 Stabilité financière
Un bon système de tarification doit induire une structure de primes qui apporte une stabilité financière à l'assureur. Les bonus attribués par le système ne doivent pas ultimement causer une insuffisance des tarifs.

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS ,14
Définition 20 Pour les systèmes bonus-malus, la stabilité financière est analysée à partir du pourcentage stationnaire espéré de la prime de base que nous noterons par b'
l
b' == ~ajbj. j=l
Nous définissons aussi la classe stationnaire espérée Cl
l , ~ .
c == ~ajJ, j=l
et le niveau de stationnarité relatif N S RE
N S RE == b' - b1 .
bl - b1
, Un pourcentage stationnaire espéré bl supérieur à 1 suggère que le système n'accorde ultimement que des malus. Parallèlement, si ce pourcentage est inférieure 1, le système n'accorde ultimement que des bonus. L'interprétation du NSRE est semblable. Un niveau faible du N S RE suggère une forte proportion des assurés dans les classes à fort bonus. Tandis qu'un niveau élevé du N S RE suggère une meilleure répartition des assurés à travers les classes.
Des mesures comme la probabilité de ruine, ou le niveau du surplus à la ruine, peuvent aussi être utilisées. Mais, dans la littérature sur les bonus-malus, bl est mis de l'avant à cause de la nature markovienne des systèmes bonus-malus.
Proposition 21 (Stabilité financière d'un système bonus-malus) Un système bonusmalus est stable financièrement si
(i) il est transparent b' == 1.
(ii) lorsque la stationnarité est atteinte, l'assuré ne se retrouve pas dans une classe extrême
O<NSRE<1.
Remarque 22 1. Le terme transparent découle du fait que, lorsque b' #- l, les tarifs changent progressivement dans le temps et les assurés ne peuvent alors anticiper convenablement les bonis. Le cas de figure où un assureur charge une prime très élevée aux nouveaux conducteurs pour compenser son déséquilibre financier est aussi dit non équitable.
2. Dans la plupart des pays développés, la fréquence moyenne des réclamations est souvent en deçà de 10 %. Ceci entraîne un agglutinement des assurés dans. les classes à haut bonus et une non transparence du système. Parallèlement, même si ce phénomène est connu, il est -difficile à éviter car un système qui pénaliserait trop sévèrement les assurés ne respecterait pas le principe d'assurance de transfert du risque présenté à la section (2.3.2.2).

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS 15
3. Le N S RE est une mesure particulièrement utile pour comparer des systèmes entre eux, car, généralement, des systèmes différents ont des niveaux de prime minimum b1
et maximum bl différents.
Pour les systèmes imposés à tous les assureurs par le gouvernement, les mesures de stabilité financière permettent d'anticiper le comportement des tarifs. Pour les assureurs agissant dans un libre marché, les mesures de stabilité permettent, dans la phase de conception d'un système, de corriger les défaillances.
Exemple 23 (Suite de l'exemple (8)) Supposons que la fréquence des réclamations suit une loi de Poisson de paramètre À. Le tableau (2.3) présente la classe stationnaire espérée c', le pourcentage stationnaire espéré b' et le niveau de stationnarité relatif N S RE pour différentes valeurs de À.
Le système bonus-malus de la Thaïlande est transparent et maintient les assurés dans la classe médiane, si la fréquence des réclamations est de 0.5. La classe initiale de ce système, la classe 4, est aussi la classe stationnaire espérée pour À == 0.5. Le système est donc stable financièrement dans un environnement où il y a une réclamation tous les deux ans. Pour un environnement où le risque est plus élevé, le système réagit en chargeant une surprime. Parallèlement, pour un environnement où le risque est · moins élevé, le système réagit en accordant un boni.
À 0.10 0.25 0.50 1.00 1.25 c' 1.59 2.49 4.02 6.01 6.40 b' 67.19 % 79.03 % 100.82 % 128.52 % 133.42 % NSRE 8.99 % 23.78 % 51.03 % 85.65 % . 91.78 %
TAB. 2.3 - c', b' et NSRE pour le système de la Thaïlande
2.3.2.2 'Iransfert adéquat du risque
Un système de tarification vise à faire contribuer équitablement chaque assuré au financen1ent des réclamations. Cependant, si les malus sont trop élevés, le système n'encourage pas les assurés à faire une réclamation et les empêche ainsi de bénéficier de la couverture à laquelle ils ont droit. Pire, il peut encourager les assurés à s'enfuir après avoir causé des dommages à des tiers. Pour éviter ces problèmes, les changements de prime entraînés par les bonus et les malus doivent être raisonnables, sans quoi le système ne transfère pas adéquatement le risque. La définition suivante présente des n1esures permettant de quantifier l'ampleur des changements de prime induits par le système.
Définition 24 Pour les systèmes bonus-malus, l'ampleur des changements de prime induits par le système est analysée à partir du coefficient de variation de la prime
JVar (IT (Ct)) Pt == E ( IT (Ct))

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS 16
et la rétention optimale moyenne
é* = max E (Rt (x, é)) , E:
où Rt (x, é) est la compensation réelle induite par le système pour une rétention de é
ex) ex)
s=t+1 s=t+1
La compensation réelle met en perspective le montant versé pour les réclamations et la perte de bonus reliée à la déclaration d'une réclamation. Pour ce faire, il est nécessaire de considérer toutes les réclamations et les bonus à venir (Holtan [21]). La rétention E correspond ainsi à un déductible que l'assuré s'impose pour maximiser sa compensation réelle.
Un coefficient de variation de la prime faible suggère que les changements de primes apportés par les bonus ou les malus entraînent une variation faible dans la prime et permettent donc un transfert adéquat du risque. De même, une rétention optimale moyenne faible suggère que le système transfère adéquatement le risque
Remarque 25 La rétention optimale moyenne est aussi appelée « appétit pour les bonus » de la terminologie anglaise « bonus hunger ». Ce phénomène a traditionnellement été compris comme la façon dont les systèmes bonus-malus introduisent le concept de déductible. Récemment, les travaux de Moreno et autres [37] ont montré que ce phénomène peut aussi être considéré comme un mécanisme peu coûteux contre la fraude.
Proposition 26 (Principe de transfert du risque dans un système bonus-malus) Un système bonus-malus respecte le principe de transfert du risque si
(i) Le coefficient de variation de la prime de l'assuré Pt est raisonnable,
(ii) La rétention optimale moyenne é* est raisonnable.
Exemple 27, (Suite de (23)) À la stationnarité, si la prime de base est de l, nous avons
lim 1r (Ct) t~oo
b' ,
l
L ajbJ - (b,)2, j=l
d'où, pour le coefficient de variation de la prime de l'assuré
lÎln Pt = t~oo
Le tableau (2.4) présente les résultats de calcul pour différentes valeurs de À

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS 17
Coefficient de variation
TAB. 2.4 - Coefficient de variation de la prime de l'assuré pour le système de la Thailande
Exemple 28 Pour les valeurs de À présentées, à la stationnarité, la prime de l 'assuré peut varier entre 8.46. % et 2l.05 % entre chaque période. Par exemple, pour À = 0.5, la prime de l 'assuré peut augmenter ou diminuer de 25.73 % entre chaque période. De nos jours, il n'est pas rare de voir une police d 'assurance augmenter de 25 % suite à la déclaration d 'un accident. En ce sens, le système bonus-malus de la Thaïlande respecte le principe de transfert du risque.
Remarque 29 Le calcul de la rétention optimale moyenne est complexe et utilise des m éthodes qui dépassent le cadre de ce chapitre. Nous référons le lecteur à Holtan [21} pour des exemples de calcul de la rétention optimale moyenne.
2.3.2.3 Estimation adéquate du risque
Un système de tarification, dans le contexte de l'assurance automobile, vise à attribuer à chaque assuré une prime qui reflète le risque qu'il représente. Cette personnalisation de la prime attribue ainsi une juste proportion des réclamations totales à chaque assuré. Pour ce faire, l'écart entre la prime chargée 1[ (Ct) et le risque encouru E (Xt+l ) constitue une mesure de la capacité d'un système à estimer adéquatement le risque. La façon dont évolue cet écart dans le temps doit aussi être considérée, de même que la capacité du système à réagir à des changements dans la distribution de X t .
Proposition 30 (Estimation adéquate du risque pour un système bonus-malus) Un système bonus-malus entraîne une estimation adéquate du risque (Xt)tEN si
(i) l 'erreur quadratique de tarification espérée en régime stationnaire ET est suffisamment faible i. e. que le niveau de prime stationnaire est proche de l 'espérance du montant des réclamations
ET=E((b' - E(X))2) ,
(ii) il parvient à avoir une élasticité TJ proche de 1 pour x E [al, a2] , [al, a2] étant un intervalle de valeurs communes pour l 'espérance des classes de tarifs
dln b' db'/ dx TJ=--==- -
dln x b' x '
(iii) les probabilités de transition atteignent la stationnarité rapidement, i. e. si la variation totale VTn décroît rapidement dans le temps
1 .
VT~ = L 1 q~j - aj 1 .
j=l

2.3. ANALYSE D'UN SYSTÈME BONUS-MALUS 18
L'élasticité'T) constitue une mesure de la capacité du système à réagir à des changements dans la distribution de Y. Il est généralement impossible de concevoir un systèn1e capable de réagir à tous les changements possibles dans la distribution de Y, d'où la restriction à un intervalle de valeurs communes.
Si le système estime adéquatement le risque, alors il est en mesure de séparer les bons conducteurs des mauvais conducteurs le plus rapidement possible. Or, ce tri des conducteurs est finalisé une fois que les probabilités de transition atteignent la stationnarité. C'est pourquoi un système qui atteint la stationnarité rapidement atteint aussi son but d'estimer adéquatement le risque.
Remarque 31 1. Le niveau de prime de la classe de départ bio doit être le plus près possible de b' afin d 'accélérer la convergence. Les règles de transition ont généralement peu d Jimpact sur la vitesse de convergence.
2. L'hypothèse d 'homogénéité de la distribution du risque dans le temps d'un système bonus-malus est souvent remise en question, entre autres par son ignorance de la possibilité d 'apprentissage des assurés. Un système possédant une bonne élasticité compense cependant pour cette lacune.
3. La majorité des systèmes bonus-malus suppose que la fréquence est indépendante de la sévérité. Dans ce cas, le système bonus-malus constitue un moyen d'estimer l 'intensité des réclamations. L 'erreur de tarification espérée peut alors être réécrite comme
Exemple 32 (Suite de (27)) Soit VT la variation totale moyenne jusqu 'au moment où est atteint la stationnarité
T' , ---- 1 VT= - ~VTt.
T'~ t=O
Le tableau (2.5) présente le moment où le système atteint la stationnarité T' et la variation totale moyenne fusqu 'à ce moment. Dans le cas où À = 0.5, le système atteint la stationnarité après 42 ans. C 'est aussi le cas où la variation totale moyenne décroit le plus lentement.
À 0.1 0.25 0.5 1 1.25
T' 18 29 42 38 31
VT -47.11 % -33.18 % -23.79 % -26.40 % -31.57 %
TAIL 2.5 - Stationnarité et variation totale moyenne pour le système de la Thailande

19
Chapitre 3
Réassurance
3.1 Principaux produits de réassurance
La réassurance est une activité majeure de la plupart des assureurs. Pour les risques ordinaires qui ne mettent pas en danger la solvabilité de l'assureur, la réassurance n'est généralement pas considérée. Cependant, pour les autres types de risques, soit les risques catastrophiques, soit les risques où le montant des réclamations peut être très élevé, la réassurance est une alternative stratégique très intéressante. En effet, elle consiste en un transfert du risque entre l'assureur, la cédante, vers un autre assureur, le réassureur. Ce transfert libère la cédante d'une partie du risque et permet de solidifier sa solvabilité.
Un contrat de réassurance détermine les règles selon lesquelles le risque est transféré entre la cédante et le réassureur. L'évaluation de la prime du contrat est une difficulté importante pour la détermination des bénéfices de la réassurance. Il existe de nombreuses formes de contrats, mais elles peuvent généralement toutes être ramenées à une combinaison de contrats de base (Patrick [40]). Les définitions suivantes décrivent ces contrats de base .
. Elles nous seront très utiles pour simplifier la discussiqn des contrats complexes.
Définition 33 (Contrat de réassurance) Pour un risque X, un contrat de réassurance définit la portion il retenue par la cédante, et la portion R transférée au réassureur tel que
X = R+R.
La répartition du risque peut être faite sur une base proportionnelle, une base non proportionnelle ou une combinaison des deux.
Définition 34 (Réassurance proportionnelle) Un contrat de réassurance proportionnel limite la responsabilité de la cédante à . une proportion c du risque X, 0 < c < 1 , appelée le facteur de proportionnalité. Le réassureur assume le risque (1 - c) X.
R cX,
R (1 - c) X.

3.1. PRINCIPAUX PRODUITS DE RÉASSURANCE 20
Définition 35 (Réassurance non proportionnelle) Un contrat de réassurance non proportionnel limite la responsabilité de la cédante à un montant b, appelée limite de rétention. Le réassureur assume le risque (X - b) + .
R min (X,b) ,
R (X-b)+,
où (X - b)+ = max(O , X - b).
Il existe deux types de contrats de réassurance proportionnel, le contrat de quote-part ( quota-share) et le traité de surplus (surplus treaty).
Définition 36 (Réassurance quote-part) Un contrat de quote-part est un contrat de réassurance proportionnel où le facteur de proportionnalité c est constant. Le transfert de risque entre la cédante et le réassureur est défini comme
Rqp cX,
Rqp (l-c)X.
Définition 37 (Réassurance de surplus) Un contrat de surplus est un contrat de réassurance proportionnel où le facteur de proportionnalité c varie selon le montant maximal de réclamation a que la cédante souhaite assumer et ' la valeur maximale m que le risque peut prendre
a min (X, a) + - (X - a)+ '
m -
(1 - ;) (X - a)+ '
m max {x : x E support (X)} .
Remarque 38 (Secteur couvert en réassurance proportionnelle) Les contrats proportionnels sont utilisés dans presque tous les domaines de l'assurance. C'est l'origine de la volatilité du risque qui détermine le choix entre le contrat de quote-part et le traité de surplus (Goovaerts, Vyncke [19]). La volatilité du risque correspond à la composante du risque qui provoque le plus de fluctuations tel que mesuré par la variance par exemple. Le contrat de quote-part est surtout utilisé si la volatilité du risque provient de la fréquence des réclamations. Tandis que le contrat de surplus est utilisé si la volatilité du risque provient de la sévérité des réclamations.
En réassurance non proportionnelle, il existe trois types de contrats (Splitt [47]). Les contrats d'excédent de sinistre (excess-of-loss) qui s'appliquent aux contrats individuels, les contrats d'excédent de perte (stop-loss) qui s'applique à un portefeuille de contrat, et les contrats couvrant les réclamations les plus élevées (largest claim et ECOlVIOR). Pour décrire ces différents contrats, définissons Yi le montant de la réclamation i, i = 1, .. , N, et N le nombre total de réclamations tel que le risque S est défini comme S = I:~1 Yi.

3.1. PRINCIPAUX PRODUITS DE RÉASSURANCE 21
Définition 39 (Réassurance excess-of-Ioss) Un contrat de réassurance « excess-of-loss )) est un contrat de réassurance non proportionnel avec limite de rétention b applicable à chaque réclamation individuelle
N
Rxl L min (Yi, b) , i=l
N
Rxl = L(Yi-b)+. i=l
Définition 40 (Réassurance stop-Ioss) Un contrat de réassurance « stop-loss )) est un contrat de réassurance non proportionnel avec limite de rétention b applicable au total des réclamations
Rsl min (S, b) ,
R sl (S - b)+ .
Définition 41 (Réassurance des réclamations les plus élevées) Un contrat de réassurance pour les réclamations les plus élevées, aussi appelé « largest claim cover )), est un contrat de réassurance non proportionnel avec limite de rétention b, applicable au total des réclamations, définie comme la somme des j plus petites réclamations. Le contrat est semblable à un contrat · stop-lo$s avec limite de rétention définie par
j
b = LY(i)' i=l
où (Y(l), ... , Y(N)) désigne les statistiques d'ordre du vecteur aléatoire (YI, ... , YN ).
Définition 42 (Réassurance ECOMOR) Un contrat de réassurance de l'Excédent du Coût Moyen Relatif (ECOMOR), est un contrat de . réassurance non proportionnel avec limite de rétention b, applicable à chaque réclamation individuelle, définie comme la j -ième plus grande réclamation. Le contrat est semblable à un contrat excess-of-loss avec limite de rétention
b = Y(N - j).
Remarque 43 (Secteurs couverts en réassurance non proportionnelle) Les contrats stop-loss sont surtout utilisés si la volatilité du risque provient de la fréquence des réclamations. Tandis que les contrats excess-of-loss sont utilisés si la volatilité du risque provient de la sévérité des réclamations. Cette remarque s'applique aussi aux contrats largest claim et ECOMOR, puisque ce sont aussi des contrats, respectivement, stop-loss et exces-of-loss. Notons cependant que ces deux derniers types de contrats sont rarement utilisés en pratique (Splitt [4 ~).
Pour identifier le besoin et les bénéfices d'un contrat de réassurance, la cédante doit adopter une ll1esure_ de risque. Dans cette optique, la cédante doit minimiser le risque du portefeuille retenu R, en regard de sa mesure de risque, tout en respectant ses contraintes budgétaires.

3.1. PRiNCIPAUX PRODUITS DE RÉASSURANCE 22
Définition 44 Une mesure de risque p est une fonction qui associe à tout risque X un score
p(X).
Le concept de mesure de risque est distinct du concept de fonction d'utilité. La différence est qu'une mesure de risque est indépendante des préférences du preneur de décision, et permet donc d'introduire une séparation entre la quantification d'un risque et la quantification des préférences associées au processus de décision. Par exemple, pour un risque X et une mesure de risque p, différents preneurs de décision peuvent prendre des décisions complètement différentes, même s'ils se basent tous sur le même score p (X). Ainsi, le score p (X) quantifie le risque, tandis que les préférences des différents preneurs de décisions ne sont pas explicitées.
L'exemple suivant illustre le calcul de la prime pur pour les différents contrats de réassurance présentés.
Exemple 45 Soit un portefeuille de n polices d'assurance automobile. Supposons que, pour chaque police, la fréquence suit une loi de Poisson À et que la sévérité suit une loi Exponentielle de moyenne (3. Considérons le risque retenu par la cédante R, pour différents cas de réassurance
- sans réassur:ance : aucun transfert de risque au réassureur, la cédante assume tout le r'lsque
S rv Poisson Composé (nÀ; Y rv Exponentielle ((3)) ,
E (R) = E(S) = nÀ(3.
- réassurance quote-part : en diminuant l'impact de chaque réclamation, la cédante se
protège contre une hausse inattendue du nombre de réclamations
Rqp rv Poisson Composé (nÀ; Y rV Exponentielle (c(3 )) ,0 < c < 1,
E ( Rqp ) = nÀ(3c.
- réassurance de surplus : en plaçant une limite sur le montant des réclamations, la cédante se protège contre une hausse inattendue de la sévérité
Rs rv Poisson Composé (nÀ; y') i
y' = min (y, a) + ~ (y - a)+ ,0 < a < m < 00, m
y rv Exponentielle (f3) ,
E (As) = nÀ(3 (1- (1- ;) e-a
/i3 ).
- réassurance excess-of-loss : effet semblable à ta réassurance de surplus, mais plus pro-
noncé, car la cédante ne contribue plus après la limite
Rxs rv Poisson Composé (nÀ; y') ,
y' = min (y, bxs ) ,0 < bxs < 00,
y rv Exponentielle ((3) ,
E (Rxs ) = nÀ(3 (1 - e-bx,/i3) . (3.1)

3.1. PRINCIPAUX PRODUITS DE RÉASSURANCE 23
- réassurance stop-loss : la cédante se protège à la fois contre la volatilité de la fréquence et la volatilité des réclamations en plaçant une limite sur le montant total des réclamations
Rsl == min (5, bsl ) ,0 < bsl < 00,
5 rv Poisson Composé (nÀ; Y rv Exponentielle ((3)) .
Exemple 46 Reprenons le contexte de l'exemple précédent et supposons que le portefeuille est constitué d 'une police avec À == 0, 5 et (3 == 0, 5 tel que
5 rv Poisson Composé (0,5; Y rv Exponentielle (0,5)) .
Considérons le cas où la cédante souhaite transférer 50 % du risque au réassureur tel que
E ( Rqp ) = E ( Rs) = E ( Rxs) = E ( RSl) = 50 %E (S) . (3.2)
Les paramètres des différents contrats de réassurance sont présentés dans le tableau (3.1) .
Paramètres quote-part c == 50 % surplus a == 0.3236, m == 9 excess-of-Ioss bxs == 0.3466 stop-Ioss bsl == 0.4642
TAB. 3.1 - Paramètres des contrats de réassurance
Les calculs sont réalisés en discrétisant la distribution Exponentielle sur 250 points. Nous utilisons la formule récursive de Panjer pour obtenir la distribution de probabilité de 5, tel que présentée dans Klugman et autres [26] en (4.16). Les paramètres du contrat de surplus, du contrat excess-of-Ioss et du contrat stop-Ioss sont déterminés par optimisation numérique afin de satisfaire la relation (3.2). Nous utilisons la méthode du gradient réduit généralisé. Comme point de départ de l'algorithme d'optimisation, nous utilisons:
- pour le contrat de surplus: la limite de rétention donnée par le contrat excess-of-Ioss en (3.1). Pour estin1er m, nous approximons la distribution de 5 par une loi Gamma, tel que présenté à la proposition (1) , et obtenons le 99,99 % percentile de la distribution approximée.
- pour le contrat excess-of-Ioss : la limite de rétention donnée par le contrat excess-of-Ioss en (3.1) .
- pour le contrat stop-Ioss : la borne de Bowers tel que présenté dans la proposition (57). Avec ces exemples, notre but est de montrer l'impact des différents contrats de réassu
rance. En effet, comme nous discrétisons la distribution Exponentielle sur 250 points, notre précision est de 2;0 == 8 %. Cependant, cette précision est relative à la distribution Ex:' ponentielle. Si nous considérons la distribution discrétisée comme une distribution en tant que telle, la notion de précision disparaît et nos exemples deviennent un cas de portefeuille Poisson avec une sévérité discrète très semblable à la sévérité Exponentielle.
Avant de présenter le prochain exemple, nous définissons les quantités suivantes.

3.1. PRiNCIPAUX PRODUITS DE RÉASSURANCE 24
Définition 47 Nous définissons la moyenne, la variance, le coefficient d'asymétrie (skewness) et le coefficient d'aplatissement (kurtosis) d'une distribution X par
f-L E (X) , 0-2 E ((X - f-L)2) ,
K3 E [ eX ;/)3] K4 E [ex ~~)4]
où 0- == JVar (X) .
Exemple 48 Reprenons le contexte de l'exemple précédent et supposons que la cédante appréhende trois scénarios d'aggravation du risque :
- la sévérité augmente de 50 % : (À == 0.5, f3 == 0.75) , - la fréquence augmente de 50 % : (À == 0.75, (3 == 0.5) , - la sévérité et la fréquence augmentent de 50 % : (À == 0.75, (3 == 0.75) .
A nalysons comment le risque retenu par la cédante se comporte dans ces différentes situations. Pour ce faire considérons les quatre caractéristiques de base d 'un risque soit l'espérance, l'écart-type, le coefficient d'asymétrie et le coefficient d'aplatissement. Pour chacune de ces quantités, le tableau (3.2) montre l'écart relatif dans un contexte sans réassurance. Par exemple, lorsque la sévérité augmente ' de 50 %, avec le contrat de surplus, l'espérance du risque retenu diminue de 23 % par rapport à l'espérance sans réassurance de 0.2591. Tandis que si le risque ne s 'aggrave pas l 'espérance du risque retenu diminue plutôt de 48 %, toujours par rapport au contexte sans réassurance et avec le contrat de surplus.
Le contrat de réassurance stop-loss apporte la plus grande protection à la cédante et ce dans tous les cas de figure. C'est le contrat qui engendre le plus petit écart-type, le plus petit coefficient d'asymétrie et le plus petit coefficient d'aplatissement. Les trois quantités mentionnées sont toujours considérablement réduites par rapport aux autres contrats et par rapport au cas sans réassurance. Cette supériorité du stop-loss ne va pas sans une plus grande exigence du réassureur qui apportera une surprime à la tarification d'un aussi bon contrat.
Le contrat de réassurance quote-part ne garantit pas à la cédante une aussi grande réduction du risque que le contrat stop-loss. Cependant, ce contrat réagit très bien à une augmentation du risque. En effet, lorsque l'espérance de S s'aggrave de 125 %, le contrat quote-part limite cette augmentation à 17 %. Au niveau de l'écart-type, lorsqu 'il s'aggrave de 84 %, le contrat quote-part maintient l'écart type à son niveau sans aggravation. Le contrat permet aussi de dimin'4er les coefficients d'asymétrie et d'aplatissement. Ainsi, même si le contrat quote-part ne protège pas autant la cédante que le contrat stop-loss, il constitue un très bon moyen pour la cédante de se protéger contre une aggravation du risque avec un coût moindre que dans un contrat stop-loss.
Les contrats de surplus et d'excess-of-loss offrent une protection à mi-chemin entre le contrat quote-part et le contrat stop-loss. Comme ces contrats sont sur base de réclamation

3.1. PRiNCIPAUX PRODUITS DE RÉASSURANCE 25
individuelle, la protection supplémentaire qu'ils apportent par rapport à un contrat quote-part ne vaut peut- être pas la peine, vue la complexité administrative qu 'ils impliquent. De même, en comparant avec un contrat stop-loss, 'la complexité administrative de ces deux contrats peut être équivalente à la surprime requise par un contrat stop-Ioss.
Espérance Ecart-type ,\ 0.5 0.5 0.75 0.75 0.5 0.5 0.75 0.75 f3 0.5 0.75 0.5 0.75 0.5 0.75 0.5 0.75 sans réassurance 0.2591 50 % 50 % 125 % 0.5091 50 % 22 % 84 % quote-part -48 % -23 % -22 % 17 % -49 % -24 % -38 % -6 % surplus -48 % -42 % -22 % -13 % -59 % -55 % -50 % -46 % excess-of- loss -49 % - 42 % - 23 % - 8 % - 60 % -56 % -51 % -43 % stop-loss -48 % -42 % -28 % -21 % -62 % -60 % -59 % -58 %
Coeff. d'asymétrie Coeff. d'aplatissement ,\ 0.5 0.5 0.75 0.75 0.5 0.5 0.75 0.75 f3 0.5 0.75 0.5 0.75 0.5 0.75 0.5 0.75 sans réassurance 2.9456 0% -18 % -18 % 14.5609 0% -27 % -27 % quote-part -2 % -2 % -20 % -20 % -3 % -3 % -28 % -28 % surplus -44 % -47 % -54 % -56 % -60 % -62 % -67 % -68 % excess-of-loss -44 % -47 % -54 % -56 % -60 % -62 % -67 % -68 % stop-loss -68 % -74 % -86 % -92 % -86 % -88 % -91 % -92 %
TAB. 3.2 - Écart relatif entre les contextes sans réassurance et avec réassurance
Exemple' 49 Dans la situation présentée à l'exemple précédent, est-il possible d 'identifier le meilleur contrat pour la cédante? Pour répondre à cette question nous devons supposer que la cédante utilise une certaine mesure de risque. Le meilleur contrat de réassurance est celui qui obtient le score le plus bas dans les différentes situations par rapport à la mesure de risque de la cédante. Considérons les mesures de risque suivantes :
- L'écart-type , p(S)=E(S)+VVar(S).
- L'espérance, l'écart-type, le coefficient d'asymétrie et le coefficient d'aplatissement
Le contrat stop-loss obtient de loin le plus bas score pour les deux mesures de risque et ce dans tous les scénarios d'aggravation du risque. Suivent ensuite le contrat de surplus et d'excess-of-loss qui obtiennent à peu près le même score pour les deux mesures de risque, le contrat quote-part obtenant le plus haut score. Pour raffiner notre étude, nous pourrions donner un poids à chaque scénario d'aggravation du risque et obtenir un score absolu pour chaque 'contrat de réassurance. Cependant notre classement des contrats resterait le même puisque l'impact de chaque contrat est identique dans chaque scénario d'aggravation du risque.

3.2. RÉASSURANCE STOP-LOSS 26
3.2 Réassurance stop-Ioss
3.2.1 Résultats les plus importants
Devant différents contrats de réassurance offerts pour la même prime, nous pouvons prouver que le contrat de réassurance stop-loss est celui qui apportera le plus de protection à la cédante. En effet, le contrat stop-loss est celui qui minimisera la variance du portefeuille. Inversement, nous pouvons auss~ prouver que pour un niveau de variance donnée, un contrat stop-loss minimise la prime de réassurance. Dans cette section nous analysons ce résultat, pour la démonstration voir le théorème (64) .
Proposition 50 (Variance minimale du stop-Ioss) Soit 1f la prime de réassurance, un contrat de réassurance stop-Ioss est la solution unique au problème d'optimisation
min Var (il), sous la contrainte Ir = E (il) .
Il en est de même pour le problème d 'optimisation
m1nE (il), sous la contrainte (}"2 = V ar (il) ,
a 2 étant la variance que la cédante est prête à assumer.
Ce résultat a été prouvé pour la première fois par Borch, [7], en 1960. Borch soulignait déjà à ce moment, [8], que ce résultat n'était pas directement applicable en pratique.
Remarque 51 Si la limite de rétention b, tel que définie en (40) , est suffisamment élevée, la cédante' peut se munir d 'une protection totale contre la ruine. Cependant, cette optimalité du stop-Ioss bénéficie seulement à la cédante. Du point de vue du réassureur, un contrat stop-Ioss est le plus désavantageux : lorsque la variance est minimale pour l 'assureur, la variance est maximale pour le réassureur. En effet, comme le contrat stop-Ioss minimise la variance du risque retenu par la cédante R, c'est le contrat qui transfère le plus de risque au réassureur. Ainsi, la variance de R se trouve maximisée par un contrat stop-Ioss. Un contrat proportionnel est beaucoup plus avantageux pour le réassureur. Comme nous pouvons le voir dans l'exemple (48), le réassureur demandera une surprime pour offrir un contrat stop-loss à la cédante.
Un réassureur conçoit généralement un contrat stop-loss de sorte que la cédante ne fasse pas un profit garanti (Rytgaard [44], Schmitter [45]). Ceci est particulièrement important, car c'est le seul moyen que le réassureur possède pour empêcher la cédante d'abuser du contrat stop-loss. La forme du contrat rencontrée en pratique s'apparente donc plus à
{
0, X < b R == (1 - c) (X - b), b < X ~ l
(1 - c) l, X > l

3.2. RÉASSURANCE STOP-LOSS 27
où b est une limite de rétention qui doit être plus élevée que la somme des primes souscrites afin que la cédante subisse une perte avant que la protection du contrat stop-Ioss ne soit effective,
c est un pourcentage de co-assurance qui force la cédante à contribuer lorsque la protection du contrat s'applique afin de l'inciter à maintenir la qualité de sa souscription des risques,
- l est une limite maximale placée sur le montant total de la couverture du contrat, afin d'éviter des comportements opportunistes comme une plus grande souscription de polices que d'habitude.
Remarque 52 (Stop-loss comme outil interne de répartition du risque) Une compagnie d'assurance pourrait u,tiliser un contrat stop-loss à l'interne pour se couvrir contre un risque particulier ou pour financer un fonds en cas de catastrophe. La procédure est décrite dans Ammeter [2] et suppose que la prime soit répartie sur différents portefeuilles de la compagnie, qu 'ils soient reliés ou non au risque en question. Bien qu'attrayante, cette possibilité est difficilement applicable dans le marché actuel de l'assurance où la compétition aurait tôt fait de supprimer cette augmentation de la prime .
. 3.2.2 Formule récursive
Pour le calcul de la prime stop-Ioss en tant que tel, des données sont généralement disponibles, et le réassureur peut s'en servir pour déterminer la prin1e 1T
'if == E (Rsl ) == E (S - b) + .
Proposition 53 (Prime stop-loss théorique) Soit F (x ) la fonction de répartition du risque S. La prime d'un contrat de réassurance stop-Ioss RSl' tel que définie en (40), peut être obtenue par
1T E(X-b)+
100
(x - b)+ dF (x)
100
F (x) dx, (3.3)
où P (x) == 1 - F (x ) et la troisième égalité est obtenue en intégrant par parties.
Il est possible d'évaluer de façon récursive la prime stop-Ioss. Nous présentons le cas du modèle collectif du risque. Nous supposons que le support des réclamations est sur les entiers positifs.

3.2. RÉASSURANCE STOP-LOSS 28
Proposition 54 (Récursion pour la prime stop-Ioss) Soit le modèle collectif du risque S == I:~l Yi, avec F (k) == Pr (S ~ k) , kEN et support( S) EN. La prime stop-loss peut être calculée selon la formule récursive
E (S _ b) == { E (S) , b == 0 + E(S-b-1)+ -F(b-1),b==1,2,3, ...
Preuve. Comme la sévérité suit une distribution discrète, l 'expression (3.3) pour la prime stop-loss devient
00
E(S.-b)+ == LF(i ). i=b
En décomposant la somme nous obtenons
00
E (S - b)+ == L F (i) - F (b - 1) , i=b-l
d'où la formule récursive. •
D'un point de vue théorique, la formule récursive présentée a le désavantage d'imposer que la distribution de la sévérité soit discrète. D'un point de vue pratique, cela ne constitue pas un désavantage car il est toujours possible de recourir à des méthodes de discrétisation comme présentées dans Klugman et autres [26] et Rolski et autres [41]. Nous pouvons ainsi approximer des sévérités continues et utiliser la proposition.
Dans le cas où la distribution de la fréquence N appartient à la famille (a, b, k), il est possible de déterminer F (x) par l'algorithme récursif de Panjer [26]. Tandis que dans le cas du n10dèle individuel du risque, la formule récursive tient toujours et F (x) peut être déterminé par l'algorithme récursif de De Pril [26].
Remarque 55 (Méthodes d'estimation de la distribution des réclamations) De nombreux articles présentent des méthodes d'estimation de distribrutions. Nous suggérons d'utiliser la méthode de la distance quadratique pondérée qui repose sur la méthode des moindres carrés. Luong et Thompson [34] soulignent que cette méthode est simple d'application et per-
. met d'obtenir facilement des intervalles de confiance. Elle convient généralement à toutes les situations d 'estimations, en particulier celles où la méthode du maximum de vraisemblance est difficile à appliquer, comme le montrent Luong et Doray [35].
3.2.3 Approximations
Lorsque seulernent les moments de la distribution des réclamations sont disponibles ou si les données ne sont pas assez précises pour pern1ettre d'estimer la distribution des réclamations, nous aurons recours à des méthodes d'approximation de la distribution du montant ' des réclamations. Nous suivons Reijen et al. [43] pour la notation, et nous utilisons les définitions de l'espérance J-L, de l'écart-type (J, du coefficient d'asyn1étrie /\'3 et du coefficient d' aplatissement ~4 tel que définis en (47) .

3.2. RÉASSURANCE STOP-LOSS 29
Proposition 56 (Approximations de la sévérité des réclamations)
1. L 'approximation « N orma-l Power » introduit une correction à la loi Normale en utilisant le coefficient d' asyrnétrie "'3
où <I> (x) est la distribution de la loi Normale standard.
2. L 'approximation de Edgeworth · introduit une correction à la loi Normale en utilisant les coefficients d'asymétrie et d 'aplatissement
(X) ( - 2) - ~ ~3 ~4 ~3 P -- < z ~ <I> (z ) - cp (z ) -H2 (z ) + -H3 (z ) + -H5 (z ) ,
a - 6 24 72
avec cp (z ) la fonction de densité de probabilité de la loi Normale standard et les polynômes d'Hermite H2 (z) == z2 - 1; H3 (z) == z3 - 3z et H5 (z ) == z5 - 10z3 + 15z
3. L 'approximation Gamma translaté est très utilisée en pratique. La translation permet d'utiliser les trois premiers moments de la distribrution des réclamations S
f (x) ~ ( )
0-1 -(x-xo)j{3 X - Xo e
fgamma( x ) == j30 f(o:) ,
( )
2 2 . ~3a 2a
- , j3 == -, Xo == P - -. ~3 2 "'3
0: ==
4. L 'approximation Inverse-Gaussienne est récente (Chaubey et autres [1 3]) . Reijen et al. [43] la recommande pour les cas où le coefficient d'asymétrie de la sévérité ~3X et le coefficient d'aplatissement du total des réclamations "'45 sont tels que 5 < "'3X < 15 et 1.5 < ~4S < 50
f (x) ~ fIG (x) == e exp (_ (()Z2 )), · /2 ( ) 3 2 x - x 0 V 'Tf X - Xo
x - Xo - m 3a2 3a2m2 Z == ,m == -,8 == ---,Xo == P - m.
m ~3 "'3
5. L 'approximation Gamma Inverse-Gaussienne (Chaubey et autres [13]) combine l'approximation Gamma et l 'approximation Inverse- Gaussienne afin d'approximer aussi ' le coefficient d'aplatissement de la distribution des réclamations. Reijen et al. [43] la recommande pour les cas où nous avons 0 < ~3X < 5 et 0 < ~4S < 1.5
f (x) ~ wfgamma (x) + (1 - w) fIG (x) ,
""4S - ""4IG f-C4 - 5",,~/3 w
""4gamma - ~4IG -",,~/6

3.2. RÉASSURANCE STOP-LOSS 30
En [23], Kaas souligne qu'en pratique il n'y a pas de différence significative entre la prime stop-loss déterminée de façon exacte après avoir estimé la distribution des réclamations, ou la prime stop-loss déterminée à l'aide d'une méthode d'approximation. Son argumentation repose sur le fait que la distribution des réclamations est estimée à partir des données. Ainsi, comme les données contiennent toujours des imperfections, ces deux alternatives seraient équivalentes.
Les propositions suivantes présentent deux méthodes simples pour avoir une idée de la prime stop-loss. Nous référons le lecteur à Bowers [9] et Benktander [6] pour plus de détails sur ces méthodes.
Proposition 57 (Borne de Bowers) Dans le cas où seulement f.1 et (J sont connues, une borne sur la prime stop-loss peut-être obtenue par
maxEF (Rsl ) F
K =
a 1
2 K + JI + K2' b-f.1
où F représente l'ensemble des distributions possibles pour le risque.
Proposition 58 (Approximation de Benktander) Considérons un contrat stop-loss spécial où b = E (X), la prime peut être approximée par
Exemple 59 Considérons un portefeuille S f"'J Poisson Composé (À = 1; Y f"'J Exponentiel (f3 = 1)). Nous pouvons calculer le r-ième cumulant de S avec la formule Cr = ÀE (yr). Le tableau (3.3) présente les résultats.
Moments de la sévérité Y Cumulants de S Caractéristiques de S
1e r moment 1.0000 1 el' cumulant 1.0000 Espérance 1.0000 2è moment 2.0000 2è cumulant 2.0000 Ecart-type 1.4142 3è moment 6.0000 3è cumulant 6.0000 Coeff. d'asymétrie 2.1213 4è mOll1ent 24.0000 4è cumulant 24.0000 Coeff. d'aplatissement 9.0000
TAB. 3.3 - Caractéristiques du portefeuille S
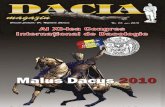
Exemple 60 Avec le portefeuille de l'exemple précéd,ent, étudions les approximations les plus utilisées, soit l'approximation Gamma, l'approximation Inverse-Gaussienne et l'approximation Gamma Inverse-Gaussienne. Une application directe des formules est présentée dans le tableau (3.4). Comme le montre le graphique (3.1), les approximations sous-estiment la masse à 0, mais performent très bien par la suite.

3.2. RÉASSURANCE STOP-LOSS 31
Gamma Inverse-Gaussienne Gamma-Inverse-Gaussienne Π== 0.8889 m == 2.0000 w == 0.0556 (3 == 1.5000 () == 4.0000
Xo == -0,333 Xo == -1.0000
T AB . 3.4 - P aramètres des différentes approximations
100,00% ------.--------------------------:--=--=--:.--~-~-M-;-;-;;---.. --.-~--~--~--~- f.4l- -~. '~~~~"'"~~~~l
90,00%
80,00%
70,00%
0
0,
60,00% o ~ 0 ,
0,
0 ,'
o , 50,00% o-f
0 1
0 :
40,00%
20,00% ·1-------------------
10,00% ·1--------------------- ----
0,00% --!-----,------,.---..,...------,------,----- ...,....----..-----,----...,-----1
o 3 4 6 8 9 10
,..----- - - - - 1
; 0 exacte. - - - - gamma + inverse-gaussienne --gamma Inverse-gaussl.enne i
FIG. 3.1 - Fonction de répartition exact e et obtenue par approximation
Exemple 61 R eprenons le portef euille précédent et étudions le calcul de la prime stop-loss pour les différentes méthodes introduites. Nous suivons Klugman et autres [26] pour la notation des distributions.
- Nous utilisons r pour désigner la fo nction Gamma Incomplète et f' la fo nction de survie de la f onction Gam m a Incomplète
r (x ; Œ, (3) == 1 - r (x; Œ.j3) .

3.3. RÉASSURANCE PROPORTIONNELLE ET N ON PROPORTIONNELLE 32
- Pour calculer la prime exacte nous utilisons la formule
E(S-b)+ 00 Àk
L k! e-À E (Yi + .. + Yk - b)+
k=O
00 Àk
L k! e- À (k{3 - k{3f (b; k + 1, {3) - br (b; k, {3) ) , k=O
où la deuxième égalité découle du fait que la convolution de k variables aléatoires exponentielles suit une loi Gamma de paramètre et = k.
- L 'approximation Gamma avec 8 ~ t (et, {3) + xo nous donne la prime stop-loss
E (S) ~ et{3 - et{3f (b - Xo; Ct + 1, {3) - (b - xo) r (b - Xo; et, {3) .
- L 'approximation Inverse-Gaussiene avec 8 ~ IG (m, e) + Xo
x -m x+m z = ---;y =---, x =b- xo.
m m
- Pour la méthode récursive, nous discrétisons la distribution Exponentielle sur 250 points et utilisons l'algorithme récursif de Panjer pour obtenir la distribution de S , tel que présenté dans Klugman et autres [26].
Exemple 62 Avec les résultats des exemples précédents, nous pouvons comparer les primes stop-loss à différents niveaux de rétention. Le tableau (3.5) donne l 'écart relatif avec la prime stop-loss calculée de façon exacte. La ligne en gras du tableau correspond à la limite de rétention b = E (8). Les approximations Inverse-Gaussienne et Gamma Inverse-Gaussienne sont désignées par IG et G-IG. Notons que l 'approximation de B enktander peut seulement être obtenue pour le cas où la rétention correspond à l 'espérance des réclamations et donne une approximation de la prime stop-loss avec un écart de 10.60 %.
Nous pouvons tirer les conclusions suivantes : - Pour la formul e récursive, plus la limite de rétention est grande, moins la précision est
bonne. Ceci est dû au fait qu 'à chaque itération de la formul e récursive, nous ajoutons une erreur provenant de la discrétisation de la distribution.
- Les approximations Gamma, Inverse-Gaussienne, et Gamma Inverse-Gaussienne performent très bien. La formule de Benktander ne performe pas très bien, cependant, elle est plus appropriée que la borne de Bowers pour avoir une idée de la prime stop-loss .
3.3 Réassurance proportionnelle et non proportionnelle
Dans cette section nous passons en revue les aspects des autres types de contrats de réassurance. J\!lême s'ils ne possèdent pas de propriété aussi forte que l'optimalité du stoploss, ils possèdent bien d'autres avantages qui font qu'ils sont aussi utilisés en pratique que

3.3. RÉASSURANCE PROPORTIONNELLE ET NON PROPORTIONNELLE 33
Rétention Exact Récurrence Bowers Gamma IG G-IG 0.0000 1.0000 0.00 % 36.60 % 4.52 % 6.25 % 6.15 % 0.0800 0.9506 -0.12 % 37.13 % 3.82 % 5.47 % 5.38 % 0.1600 0.9034 -0.26 % 37.52 % 3.16 % 4.69 % 4.60 %
0.2400 0.8585 -0.41 % 37.77 % 2.54 % 3.91 % 3.83 % 0.3200 0.8156 -0.57 % 37.89 % 1.96 % 3.14 % 3.07 % 0.4000 0.7747 -0.74 % 37.88 % 1.43 % 2.38 % 2.33 %
0.4800 0.7357 -0.94 % 37.74 % 0.92 % 1.65 % 1.61 % 0.5600 0.6986 -1.15 % 37.50 % 0.45 % 0.94 % 0.91 % 0.6400 0.6632 -1.37 % 37.16 % 0.01 % . 0.25 % 0.24 %
0.7200 0.6295 -1.62 % 36.75 % -0.39 % -0.41 % -0.41 % 0.8000 0.5974 -1.88 % 36.28 % -0.78 % -1.04 % -1.02 % 0.8800 0.5669 -2.16 % 35.78 % -1.13 % -1.64 % -1.61 %
0.9600 0.5378 -2.47 % 35.26 % -1.46 % -2.20 % -2.16 % 1.0400 0.5101 -2.80 % 34.75 % -1.77 % -2.74 % -2.69 % 1.1200 0.4838 -3.15 % 34.28 % -2.05 % -3.25 % -3.18 %
1.2000 0.4588 -3.53 % 33.87 % -2.31 % -3.72 % -3.64 % 1.2800 0.4350 -3.94 % 33.53 % -2.55 % -4.16 % -4.07 % 1.3600 0.4123 -4.37 % 33.30 % -2.77 % -4.57 % -4.47 %
1.4400 0.3908 -4.83 % 33.18 % -2.97 % -4.95 % -4.84 % 1.5200 0.3704 -5.33 % 33.20 % -3.14 % -5.30 % -5.18 % 1.6000 0.3510 -5.86 % 33.37 % -3.30 % -5.62 % -5.49 %
1.6800 0.3325 -6.42 % 33.70 % -3.44 % -5.91 % -5.77 % 1.7600 0.3150 -7.02 % 34.20 % -3.57 % -6.17 % -6.02 % 1.8400 0.2984 -7.67 % 34.87 % -3.67 % -6.40 % -6.25 % 1.9200 0.2826 -8.35 % 35.73 % -3.76 % -6.60 % -6.44 %
TAB. 3.5 - Écart relatif avec la prime stop-Ioss exacte
le contrat stop-Ioss. Notons que les méthodes d'approximations de distribution présentées pour le contrat stop-Ioss s'appliquent aussi à ces contrats.
Le contrat de réassurance quote-part est le contrat de réassurance dont les effets sont les plus transparents. Tous les aspects du risque sont répartis entre la cédante et le réassureur selon le facteur de proportionnalité c.

3.4. OPTIMALITÉ DE CERTAINS PRODUITS DE RÉASSURANCE 34
Proposition 63 Soit il un contrat de réassurance quote-part tel que défini en (36) , la distribution de probabilité, l'espérance et la variance du risque retenu par la cédante sont
Fil (x)
E(il) V (il)
Fx (~) , cE (X),
c2V (X).
Pour le risque retenu par le réassureur R, la forme des quantités mentionnées est similaire. Preuve. Avec l'égalité Pr [il < x] = Pr [X < x/cl, les résv,ltats suivent. _
Pour la cédante le seul impact d'un contrat quote-part est de diminuer la sévérité des réclamations. En effet, le coefficient de variation avant et après réassurance reste le même
/V(X) E(X)
Un contrat quote-part est très utile lorsque la cédante souhaite pénétrer un nouveau marché sans s'exposer complètement au risque. Il permet aussi à la cédante de bénéficier de l'expérience du réassureur. De plus, la prime de réassurance d'un contrat quote-part tient compte du fait que la cédante assume seule les coûts administratifs. De ce fait, le réassureur rembourse généralement une partie de la prime à la cédante, appelée commission de réassurance. Cependant, un contrat quote-part est inadéquat pour transférer le risque provenant des réclamations élevées puisque la responsabilité de la cédante n'est pas limitée.
Pour un risque élevé un traité de surplus est moins profitable pour le réassureur (Mata [36]). Il en est de même pour un contrat excess-of-loss. La cédante doit donc balancer la protection que lui apporteraient ces contrats par rapport au coût moindre d'un contrat quote-part.
En terminant, notons qu'un contrat de réassurance excess-of-loss peut être défini en fonction d'un risque ou en fonction d'un évènement. Ces deux types de couverture excessof-loss offrent à la cédante l'accès à des contrats qui peuvent être très personnalisés.
3.4 Optimalité de certains produits de réassurance
3.4.1 Optimalité du stop-Ioss
Nous considérons l'optimalité du stop-loss dans le cadre des mesures de risque (Artzner et autres [4]). Le théorème suivant est généralement présenté dans le cadre de la théorie de l'utilité (Bo\vers et autres [10]). Mais, comme nous le verrons le résultat est le mên1e et la saveur du théorème ne change qu'à un signe près.

3.4. OPTIMALITÉ DE CERTAINS PRODUITS DE RÉASSURANCE 35
Théoreme 64 (Optimalité du stop-Ioss) Si la cédante - possède une réserve u, . - présente de l'aversion au risque, i. e., que sa mesure de risque est telle que
pli (u) > 0,
- fait face à un risque X, - souhaite acheter un contrat de réassurance pour P, et que le marché de la réassurance offre pour une prime de 1r tous les contrats de ré
assurance R, 0 < R < X, avec E (R) = 1r, alors le risque assumé par la cédante, tel que mesuré par la fonction p, est minimisé par l 'achat d'un contrat de réassurance stop-Ioss R* avec limite de rétention b* tel que E (R*) = 1r.
Preuve. Le théorème stipule que l'incertitude associée au contrat stop-loss est minimale, i.e., que
E (p (u - X + R)) 2:: E (p (u - X + R*)). (3.4)
Comme la cédante présente de l'aversion au risque, sa mesure de risque est une fonction convexe qui est toujours au-dessus de sa tangente
p (y) 2:: p (x) + p' (x) (y - x), \:Ix, y.
En utilisant ce résultat avec y = u - X + R et x = u - X + R*, nous avons
p (u - X + R) > P (u - X + R*) + p' (u - X + R*) (R - R*) > P (u - X + R*) + p' (u - b*) (R - R*) .
(3.5)
(3.6)
Pour vérifier l'inégalité (3.6), rappelons que R* = (X - b*)+, puis distinguons le cas X > b*, où l'égalité tient, et le cas, X :::; b*, où
p' (u - X + R*) (R - R*) p' (u - X + (X - b*)+) (R - (X - b*)+) p' (u - X) R
> p'(u-b*)R p' (u - b*) (R - R*) .
En prenant l'espérance de (3.6) et en utilisant l'hypothèse que E (R*) = E (R) = 1r nous obtenons bien (3.4) .•
Ce théorème a été démontré pour la première fois par Arrow [3] en 1963. En pratique, l'applicabilité du théorème n'est pas toujours aussi directe. Premièrement le
niveau de réserve requis u est le même pour toutes les formes de contrats de réassurance. Or, le niveau de réserve requis par la législation dépend généralement de la forme des contrats de réassurance. Deuxièmement, le théorème suppose que toutes le formes possibles de réassurance sont disponibles pour la même prime 1r. Cette hypothèse n'est pas réaliste, car, comme nous le mentionnons dans la remarque (51) certaines formes de réassurance sont plus désavantageuses pour le réassureur que d'autres. Le réassureur demandera donc en contrepartie une prime plus élevée.

3.5. RÉASSURANCE DANS UN CONTEXTE ÉCONOMIQUE 36
3.4.2 Optimalité du proportionnel
Vue les résultats du théorème (64) sur l'optimalité du stop-loss, il semble que, pour la cédante, un contrat de réassurances proportionnel soit moins efficace. En pratique cependant, ce n'est pas le cas et, malgré le résultat du théorème, la cédante peut tirer plus d'avantages d'un contrat proportionnel que d'un contrat non proportionnel. En effet, un contrat de réassurance quote-part est la façon la plus simple de répartir le risque entre la cédante et le réassureur. Les primes et les réclamations étant simplement réparties entre la cédante et le réassureur selon les proportions du contrat. Un contrat de quote-part constitue aussi un moyen très simple de diminuer la probabilité de ruine (Walhin [49]).
Proposition 65 Soit c la probabilité de ruine sans réassurance quote-part, soit X le risque, u la réserve et 1r la prime perçue par la cédante tel que
c == Pr (X > u + 1f) ,
La probabilité de ruine après réassurance quote-part cR- est qp
c Rqp Pr ( (1 - c) X > u + (1 - c) 1f)
Pr (X > _u + 1f) 1-c
< c .
. Un contrat quote-part augmente ainsi la réserve proportionnellement au pourcentage de cess'ton.
Les contrats de quote-part permettent aussi de financer des coûts par la commission de réassurance que la cédante reçoit du réassureur (Dickson [15]).
3.5 Réassurance dans un contexte économique
L'environnement économique dans lequel prend place tout contrat de réassurance affecte la distribution du risque retenu par la cédante. L'évolution de l'inflation peut augmenter l'impact des réclamations. De même, l'évolution des taux d'intérêt peut diminuer le montant de réserve nécessaire et donc diminuer le montant de réassurance requis. Tenir compte de l'environnement économique lors de la détermination du besoin en réassurance peut être crucial, particulièrement pour les contrats de réassurance à long terme. Les approximations et méthodes numériques présentées dans ce chapitre peuvent jouer un rôle clé dans l'évaluation de tels contrats.
Dickson et Waters [16] présentent un exemple de cette analyse sur le risque retenu par la cédante avec une approximation Gamma. Dans le même esprit, nous suggérons d'utiliser la méthode présentée par Léveillé et Garrido ([32], [31]) pour calculer les moments de la distribution des réclamations. En effet, les formules récursives qu'ils présentent pour calculer les n10ments sont simples d'utilisation et s'appliquent à un très grand nombre de situations. Ensuite, nous pouvons utiliser une des approximations, toujours en conjonction avec un calcul récursif des moments, pour procéder à l'analyse.

3.5. RÉASSURANCE DANS UN CONTEXTE ÉCONOMIQUE
Exemple 66 Soit le processus escompté du risque
N(t)
Z == L e-bTkYi.
k=l
37
Ce processus peut représenter la valeur présente d'une police d'assurance automobile avec l 'impact de l'inflation et de l'intérêt représentés dans le taux d'intérêt net 6". Posons
N (t) Poisson (Àt) ,
Yi Exponentiel ((3) .
Avec le théorème (2.1) de Léveillé et Garrido ([31]), nous pouvons obtenir les quatre premiers moments de Z (t) par la formule récursive
Ensuite, nous pouvons utiliser une des approximations présentées pour calculer la prime sous différents contrats de réassurance.

Chapitre 4
Systèmes aléatoires à liaisons complètes
4.1 Introduction
38
Un système aléatoire à liaisons complètes (SALC) est une classe de processus stochastiques dans laquelle l 'historique de tout le processus est pris en compte. En actuariat, les systèmes bonus-malus, ainsi que les autres types de systèmes de révision de la prime basés sur la crédibilité de l'expérience des assurés, sont les systèmes qui y ressemblent le plus. Les SALC constituent en fait une généralisation de la théorie des chaînes de Markov.
La généralisation qu'apporte les SALC explicite l'interaction qui existe entre la révision de la prime et le changement dans la distribution des réclamations suite à cette révision de la prime. Cette mise en évidence permet de construir!2 des modèles dynamiques de contrôle de prime. Par exemple, la règle de révision de la prime peut viser à faire augmenter la masse à 0, i.e., la probabilité de n'avoir aucune réclamation.
Dans le cadre de notre étude, nous appliquons les SALC dans le contexte du modèle classique du risque. D'une part, cette application permet d'introduire une règle de décision pour réviser la prime à chaque période en fonction des réclamations encourues dans la période. D'autre part, elle permet de modéliser l'influence du changement de la prime sur le comportement de l'assuré en introduisant une dépendance entre la distribution des réclamations et le niveau de prime. Nous verrons que, comparativement à un système classique, un système basé sur les SALC diminue grandement la probabilité de ruine.
Dans un premier temps, nous dressons un historique du développement de la théorie de ces processus. Nous présentons ensuite cette classe de processus en tant que tel et nous les introduisons dans le cadre actuariel. Nous terminons le chapitre avec un exemple numérique très détaillé qui n10ntre comment les SALC peuvent être utilisés en actuariat.
4.2 Historique
Les SALC ont été introduits en 1935 par Onicescu et Mihoc [39] comme une extension dela théorie des chaînes de Markov. Ils ont initialement appliqué ces systèmes à la modélisation

4.3. THÉORIE DES SALe 39
des problèmes d'urnes et aux problèmes d'invalidité. À partir de 1950, ces systèmes ont ensuite été appliqués en psychologie, dans le cadre des modèles d'apprentissage (Norman [38], Iosifescu et Theodorescu [48]). En 1985, ces systèmes ont été appliqués en physique dans le cadre de la théorie des fractales (Barnsley [5]) . Plus récemment, leur importance en physique a été soulignée par Fernandez et Maillard [17]. En génétique, Agapie [1] propose leur utilisation pour dépasser les limites apportées par les modèles Markoviens.
En actuariat, la première application de ces systèmes a été faite par Herkenrath [20]. À l'aide des SALC, il a considéré le problème de convergence de la prime sous différentes règles d'ajustement. Son étude s'instaure sur un horizon de temps infini et utilise les propriétés de convergence des SALC pour identifier les systèmes qui présentent une bonne convergence.
Léveillé [33] va plus loin et propose les SALC comme un nouveau modèle stochastique du risque. Son étude met en évidence les bénéfices que les SALC pourraient apporter en actuariat. D'une part, l'existence de structure de dépendance dans la plupart des problèmes actuariels, et d'autre part la capacité des SALe à modéliser à la fois cette structure de dépendance, l'influence des réclamations sur la prime et l'influence des primes sur les réclamations, fait des SALC un modèle approprié en actuariat.
Dans le cadre de notre étude, nous visons à poursuivre sur la lancée de ses recherches. En établissant, à l'aide des SALC, un programme dynamique stochastique sur un horizon de temps fini, nous espérons montrer les bénéfices de l'utilisation de ces systèmes en actuariat.
4.3 Théorie des SALe
Nous présentons dans cette section certaines propriétés ergodiques des SALC et les principaux résultats que nous utiliserons. Comme les preuves des différents théorèmes dépassent le cadre de" ce mémoire, nous référons le lecteur au livre de Iosifescu et Grigores~u [22].
4.3.1 Nature d'un SALe
La section suivante définit les SALe et précise la notation et la terminologie des différentes quantités qui y sont associées.
Définition 67 (SALe) Un système aléatoire à liaisons complètes est un quadruplet
{(W, W), (X, X) ,u,P},
où
(i) (W, W) et (X, X) sont des espaces arbitraires mesurables,
(ii) u : W X X ---t West (W ® X, X)-mesurable,
(iii) P est une probabilité de transition de (W, W) dans (X, X) .
Remarque 68 (Extension de la définition de chaîne de Markov) La définition d'un BAL C étend la définition d'une chaîne de Markov à temps discret en permettant une dépendance complète dans l 'historique du processus.

4.3. THÉORIE DES SALe
Notation 69 (Vecteur) Nous notons par x (r) le vecteur à r composantes
(r) _ ( ) x - Xl, .. ,Xr ,
et par x};) le vecteur à r composantes commençant au temps n
(r) _ ( ) xn - Xn, .. , Xn+r- l .
Notation 70 (Itérée de u) Pour n EN* et x(n) nous définissons récursivement la fonction u : W X xn ----7 W par
u(n+l) (w x (n+l)) _ { U (w, Xl), n = 0 . , - u(u(n)(w,x(n)),Xn+l),n2:: 1
La condition (iii) de la définition d 'un SALe (67) implique la mesurabilité de cette fonction.
Le théorème suivant précise la structure stochastique d'un SALe et Je sens probabiliste des quantités définies en (67) . Les remarques qui suivent le théorème illustrent son sens par analogie avec la théorie des chaînes de Markov.
Théoreme 71 (Existence d'un SALe) (i) Pour un SALe {(W, W) , (X, X) ,u, P} et un élément arbitraire fixé .Wo E W, il existe un espace de probabilité (n, K, P wo) et une suite {çn} nEN* de variables aléatoires, appelée chaîne à liaisons complètes, définies sur n à valeurs dans X telles que, pour tout m,n,r EN* et A E xr, nous avons
P Wo ([ ç n' .. , ç n+r -1] E A)
Pwo U;n+m, .. , çn+m+r-d E Alç(n))
Pwo ([çn+m," çn+m+r-1l E AlçCn), (cn))
Prn (wo,A) , (4.1)
Prm ( u (wo, ç-cn)) ,A), Pwo -p.S. , (4.2)
Prm((n,A) , Pwo-p.s., (4.3)
. où, ç(n) = (Ç1' .. , çn), (Cn) = ((l' .. , (n) et (n = u Cn) (wo, ç(n)) . (ii) La suite {(n} nEN' avec (0 = wo, est une chaîne de Markov · à valeurs dans W, dont
la distribution initiale est concentrée à Wo et dont la fonction de transition de probabilité est donnée par
Q(w,B) = P(w,{x: u(w,x) E B}),
pour tout w E W and B E W.
Remarque 72 (Terminologie SALe) Si nous posons m = r nous obtenons
( 4.4)
1 dans l'égalité (4.2),
ce qui montre que la distribution de Çn+l' étant donné le passé ç(n), dépend bien de tout ce passé par l'intermédiaire de la fonction u.

4.3. THÉORiE DES SALe 41
Remarque 73 (Probabilité d'une trajectoire) L'équation (4.1) correspond à la probabilité que, à partir de la période n, la chaîne à liaisons complètes parcoure une certaine trajectoire durant r périodes, sachant que la chaîne de Markov associée a débuté avec la
valeur (0 == Wo
P;: (wo, A) = Pr (ç~) E Aleo = wo) .
Remarque 74 (Probabilité de transition sur n périodes) L'équation (4.2) correspond à la probabilité que, sàchant tout l 'historique de la chaîne jusqu'à la période n, la chaîne à liaisons complètes parcoure m périodes plus tard une certaine trajectoire durant r autres périodes
Remarque 75 (Fonction de transition u) L'équation (4.3) vient définir la relation dé
terministe en = u(n) ( WO, t,tn)) et souligne la relation de dépendance qui existe entre chaque
période
L'équation (4.3) montre aussi que la probabilité, à partir de la période n, que la chaîne à liaisons complètes parcoure m périodes plus tard une certaine trajectoire durant r autres périodes, .peut être calculée seulement en connaissant (n
Remarque 76 (Équation de Chapman-Kolmogorov) Pour la chaîne de Markov associée, la probabilité de transition sur n périodes est donnée par
Qn (w, B) == pn (w, {x : u ( w, x) E B}) ,
et l'équation de Chapman-Kolmogorov tient
Qn+n' (w, B) = J Qn (w , dw') Qn' (w', B) .
4.3.2 SALe en actuariat
Les notions introduites dans la section précédente définissent la nature stochastique d'un SALe. Nous allons appliquer cette classe de processus au modèle classique du risque. Nous verrons que cette application permet de construire un modèle dynamique de contrôle du risque.
Définition 77 (Processus du total des réclamations et des primes) 1. Nous défi-nissons par { Sn} nEN* et {IIn} nEN les processus du total des réclamations et du total des

4.3. THÉORiE DES SALe 42
primes sur les n premières périodes par
n
k=l
n-l
où {çn} nEN* est une chaîne à liaisons complètes et {(n} nEN est la chaîne de Markov associée telle que définie dans le théorème (71).
Notons que la chaîne à liaisons complètes {çn} nEN* peut être une suite de modèle collectif ou de modèle individuel du risque. Le processus total des réclamations {Sn} nEN* peut ainsi posséder n'importe quel niveau de complexité désiré.
Définition 78 (Processus de surplus et temps de la ruine) 1. Nous définissons le processus de surplus {Rn} nEN' le temps de la ruine Tn sur un horizon de n périodes et la probabilité de ruine ?/J (n) sur un horizon de n périodes par
Rn r + IIn - Sn, r > 0, n E N*,
Tn inf{i=l, .. ,n:Ri<O},
?/Jn Pr (Tn ::; n) ,
avec Tn > n si la ruine ne survient pas d'ici la n-ième période et Ro = r.
Remarque 79 1. Nous n'avons pas posé de restrictions pour la fonction de transition u, ni pour la probabilité de transition P, car la spécification de ces quantités dépendra du contexte étudié.
2. Nous nous intéressons seulement à un horizon de temps fini, car cela reflète plus la réalité actuarielle : la solvabilité d'une compagnie est en effet souvent évaluée annuellement. De même, la viabilité d'un produit d'assurance est tOUjOUTS évaluée sur une période de temps fini.
3. En représentant le processus des réclamations par la chaîne à liaisons complètes {Çi} i EN*' une dépendance est introduite entre le processus des réclamations et le processus de prime { (i} iEN · Ainsi, par un choix adéquat de la fonction de transition u, il est possible de contrôler l'évolution du processus des réclamations.
Considérons un processus de surplus où les réclamations suivent une loi Binomiale, et supposons que
Çi I(i- l ~ Bin (m, P ((i-l)) , où m EN* et P ((i-l) E ]0,1 [ est la probabilité qu'il n'y ait aucune réclamation dans la
période i

4.3. THÉORIE DES SALe 43
Supposons que la fonction de transition u est donnée par la fonction en escalier
où Œ E lR est le facteur d'augmentation de la prime si le montant des réclamations dans la période i est inférieur au seuil 1 E N. Si le montant des réclamations est supérieur au seuil " un facteur d'augmentation plus grand (3 E lR, Œ < (3, est appliqué afin de mieux contrôler le risque de l'assuré. Une telle fonction de transition peut-être interprétée comme une règle de tarification où l'assureur change les tarifs d'un facteur Œ tant que le montant de réclamations ne dépasse pas le seuil l, et change les tarifs d'un facteur (3 si le seuil de tolérance 1 est dépassé.
Le seuil de tolérance 1 peut ainsi correspondre au montant espéré des réclamations plus une certaine marge, ou faire la différence entre des réclamations ordinaires et des réclamations extraordinaires.
Supposons que la probabilité qu'il n'y ait aucune réclamation soit comprise entre deux bornes Pl et P2
. Pl :::; pm (( i) :::; P2,
p((O) ~p~/m,
ffi0Xpl/m ((i) :::; p~/m. ~
Ces bornes représentent l'intervalle possible pour la probabilité qu'il n'y ait pas de réclamations. À chaque période notre but pourrait être par exemple d'augmenter la masse à 0 de façon à ce que l'espérance des réclamations diminue.
Dans un tel contexte, nous considérons trois cas particuliers pour la forme de la probabilité qu'il n'y ait aucune réclamation P : le cas classique Pc, le cas linéaire Pz et le cas concave Pv
Pc ((i) Pl,
Pz ((i) az ((i ~ (0) + B,
Pv ((i) aV{!(i - (0 + B,
où
l/m l/m
az P2 - Pl
(fJk-l)(o ,
l/m l/m P2 - Pl
av \1 ((3k - 1) (0 ,
B ~ l/m
Pl .
Nous allons aussi considérer le cas où la fonction de transition u est à trois paliers
11 et { 2 classifient les réclamations en fonction du risque que l'assureur souhaite assumer.

4.4. EXEMPLES
Le dernier cas est celui où les réclamations suivent une loi Binomiale Composée
~il(i-l
Pr(X == x)
4.4 Exemples
Bin.Comp. (m,p ((i- l) ,Pr (X == x)) , 1 - [1{1} (x) + 1{2} (x)] . 2
4.4.1 Contexte et notation
44
Dans cette section nous analysons l'impact des différents modèles introduits dans la section précédente. Notre analyse prend comme point de départ une distribution Binomiale pour les réclamations avec
m == 100, k == 10,
a == 1.025, f3 == 1.05,! == 5, (0 == 3.3,
Pl == 0.97, P2 == 0.99, r == 3,
où k est le nombre de périodes. À partir de ce modèle, nous considerons : - le cas classique: u ((i-l, ~i ) == ( i-l et P ((i ) == Pc ((i ) , = le cas linéaire :. u (C-1, ~i ) =:. C-1 [al lo;'!1 (~i ) + ,BI [-y ,m] (~i ) 1 et P ((i) =:. Pl (C) ,
le cas concave. u ((i-l,~i) - (i-l [a1[0 ,,[ (~i ) + f3 1[r ,m] (~i )] et P((i ) - Pv ((i)' Nous avons ainsi trois cas de référence que nous appellerons le cas binomial classique
BI (1), le cas binomial linéaire BI (2) et le cas binomial concave BI (3) .
En remplaçant la fonction de transition u, dans les cas binomiaux précédemment définis , par la fonction de transition à trois paliers
avec
1'1 5,1'2 == 10,
al 1.025,02 == 1.05,03 == 1.075,
nous avons le cas binomial classique à trois paliers B2 (1), le cas binomial linéaire à trois paliers B2 (2) et le cas binomial concave à trois paliers B2 (3).
De façon similaire, nous analysons : - le n10dèle binomial avec k augmenté: situation identique au modèle binomial de base
avec k == 20 et r == 3.8, nous notons B3 (1) ,B3 (2) et B3 (3) . - le modèle binomial avec m augmenté: situation identique au modèle binomial de base
avec m == 200, (0 == 4.9, r == 3, nous notons B4 (1) ,B4 (2) et B4 (3) . - le modèle binomial composé : situation identique au modèle binomial de base avec
(0 == 4.7 , r == 4.5 et distribution Binomiale composée pour les réclamations
~il(i- l
Pr (X == x)
Bin.Comp. (m,p ((i- l) ,Pr (X == x)) , 1 - [1{1} (x) + 1{2} (x)] . 2

4.4. EXEMPLES 45
Nous notons B5 (1) ,B5 (2) et B5 (3) . Le tableau (4.1) résume la notation pour les cinq cas étudiés. Tandis que le tableau (4 .2)
résume les paramètres des cinq cas étudiés.
classique linéaire concave modèle bi nomial classique BI (1) BI (2) BI (3) modèle bi nomial classique à trois paliers B2 (1) B2 (2) B2 (3) modèle bi nomial avec k augmenté B3 (1) B3 (2) B3 (3) modèle bi nomial avec m augmenté B4 (1) B4 (2) B4 (3) modèle bi nomial composé B5 (1) B5 (2) B5 (3)
TAB. 4.1 - Notation pour les cinq cas étudiés
m k 'Y (0 r ex Pl,P2 BI 100 10 5 3.3 3 1.025,1.05 0.97,0.99 B2 100 10 5,10 3.3 3 1.025,1.05, 1.075 0.97,0.99 B3 100 20 5 3.3 3.8 1.025,1.05 0.97,0.99 B4 200 10 5 4.9 3 1.025,1.05 0.97,0.99 B5 100 10 5 4.7 4.5 1.025,1.05 0.97,0.99
TAB. 4.2 - Paramètres pour les cinq cas étudiés
Nous donnons maintenant quelques remarques générales sur les cas étudiés. Pour le cas binomial de référence BI, la prime initiale (0 est déterminée à partir de
l'espérance des réclamations dans la première période et une marge de sécurité de 10 %. Le surplus initial r est posé égal à l'espérance des réclamations dans la première période.
(0 E (Çl) * 1.1,
r E(Çl).
Comme les cas étudiés sont très différents entre eux, il est difficile de les comparer directement. Cependant, nous pouvons présumer que le risque associé à chaque cas peut être comparé. Dans cette optique, chaque cas peut être vu comme un portefeuille d'assurance, et notre analyse vise à ordonner ces risques. Pour ce faire, plusieurs mesures d'ordonnancement de risque sont disponibles dans la littérature. Nous choisissons d'utiliser comn1e mesure d'ordonnancement la probabilité de ruine, car cette mesure saisi toute la dynamique du portefeuille et permet de con1parer directement les portefeuilles entre eux.
Ainsi, soit 1jJ (r(i)) la probabilité de ruine du cas « classique» correspondant au problème Bi. Afin de pouvoir comparer les résultats entre les différents cas, il suffit de choisir (0 et r
empiriquement de telle sorte que .
Pour B2 nous pouvons garder (0 == 3,3 et r == 3 puisque le risque associé aux réclamations ne change pas, pour B3 augmenter seulement le surplus est suffisant puisque l'accroissement

4.4. EXEMPLES 46
du risque provient de l'accroissement du nombre de périodes couverte. Tandis que pour B4 et B 5 nous d~vons ajuster à la fois la prime initiale et le surplus initial puisque le risque associé aux réclamations change.
Les calculs qui suivront seront obtenus à partir de l == 100, 000 simulations. Ce nombre de simulations est suffisamment large pour garantir une bonne précision des résultats. La procédure de simulation consiste à simuler une trajectoire du processus de la façon suivante
1 À partir de (0' simuler ç l' puis obtenir (1'
2 Simuler Ç2' puis obtenir (2'
3 répéter l'étape 2, jusqu'à ce que la ruine survienne ou jusqu'à l'atteinte de la fin de l'horizon de temps considéré.
Les Çi sont simulés à partir de la méthode de transformation inverse (Ross [42]). Les simulations et l'analyse de celle-ci sont réalisées à l'aide de Microsoft SQL Server
2005 sur un processeur Intel Core Duo 1.86 GHz avec 2 GB de mémoire vive.
4.4.2 Probabilité de ruine
La probabilité de ruine est donnée par
1 l
?jJ == l L 13 , l == 100, 000, 3=1
où la variable indicatrice 13 vaut 1 si la ruine survient dans la trajectoire s, 0 autrement.
Pour le cas binomial de référence BI, la probabilité de ruine diminue grandement dans le cas linéaire et encore plus dans le cas concave.
Dans tous les autres cas, un comportement semblable de la probabilité de ruine est observable. La probabilité de ruine diminue du cas classique au cas concave, pour les différents cas étudiés.
Dans le tableau (4.3) les cas étudiés sont ordonnés en fonction de la probabilité de ruine obtenu pour le cas classique.
classique linéaire concave BI 29.63 % 12.98 % 4.96 % B4 29.35 % Il.03 % 4.53 % B2 29.73 % 14.86 % 5.57 % B3 30.16 % 9.94 % 2.76 % B5 30.19 % 6.92 % 2.06 %
TAB. 4.3 - Probabilité de ruine

4.4. EXEMPLES 47
4.4.3 Distribution du temps de la 'ruine
La distribution du temps de la ruine P (Tn == i), i == l .. n, est donnée par
l Z
P (Tn == i) == l L ls (Tn == i) , l == 100, 000, s=l
où la variable indicatrice 18 (Tn == i) vaut 1 si, pour la trajectoire s, la ruine survient à la période i, 0 autrement.
Pour le cas binomial de référence BI, nous observons que le cas classique BI (1) a une distribution du temps de la ruine répartie sur l'ensemble de l'horizon de temps. Tandis que BI (2) a une distribution du temps de la de ruine concentrée dans les premières périodes. Pour BI (3) la concentration de la distribution du temps de la ruine est encore plus prononcée. Un phénomène semblable est observé pour les quatre autres cas, comme le montre le tableau (4.4).
Notons que pour le cas classiques BI, la distribution du temps de la ruine dans 'chaque période est assez similaire. Ceci appuie la normalisation que nous avons fait avec les probabilités de ruine dans la construction de nos exemples.
Sans résumer les caractéristiques des distributions de ruine, il est difficile de comparer nos cinq situations. Nous effectuerons cette comparaison dans la section suivante à l'aide des mesures d'impact de la ruine.
4.4.4 Espérance du moment de la ruine en cas de ruine
L'espérance du moment de la ruine en cas de ruine E (TnlTn < n) est donnée par
E(TnITn < n) == _L......:..~----'=l:::...-L----'-~...,::.ll_iI_s_(Tc_n_· ~_i) , l == 100,000.
L8=1 1S
L'espérance de la sévérité de la ruine encas de ruine E (RITn < n) est donnée par
L Z Ln R, l (Tc - i) E(RITn < n) == s=l i=lZ 'L ,S S n - ,l == 100,000,
. L8=1 18
où Ri , 8 est le niveau du surplus à la période i pour la trajectoire s. L'écart-type du moment de la ruine en cas de ruine JV (TnlTn < n) et l'écart-type de
la sévérité de la ruine en cas de ruine JV (RITn < n ) peuvent être obt,enus en calculant E (T~ITn < n) et E (R2ITn < n)
E (RITn < n)

4.4. EXEMPLES 48
BI B2 i classique linéaire concave i classique linéaire concave 0 0.0315 0.0306 0.0317 0 0.0316 0.0323 0.0316 1 0.0591 0.0523 0.0149 1 0.0589 0.0543 0.0187 2 0.0599 0.0181 0.0018 2 0.0594 0.0212 0.0030 3 0.0230 0.0193 0.0011 3 0.0234 0.0232 0.0020 4 0.0303 0.0061 0.0002 4 0.0307 0.0096 0.0003 5 0.0297 0.0021 0.0000 5 0.0305 0.0042 0.0001 6 0.0122 0.0010 0.0000 6 0.0127 0.0026 0.0000 7 0.0167 0.0002 0.0000 7 0.0165 0.0008 0.0000 8 0.0187 0.0001 0.0000 8 0.0184 0.0003 0.0000 9 . 0.0153 0.0000 0.0000 9 0.0154 0.0001 0.0000
B4 B5 1 classique linéaire concave i classique linéaire concave 0 0.0377 0.0387 0.0369 0 0.0158 0.0164 0.0152 1 0.0500 0.0397 0.0069 1 0.0604 0.0232 0.0042 2 0.0396 0.0234 0.0014 2 0.0417 0.0164 0.0009 3 0.0308 0.0057 0.0001 3 0.0321 0.0092 0.0002 4 0.0464 0.0024 0.0000 4 0.0380 0.0031 0.0000 5 0.0280 0.0004 0.0000 5 0.0317 0.0007 0.0000 6 0.0206 0.0001 0.0000 6 0.0222 0.0001 0.0000 7 0.0158 0.0000 0.0000 7 0.0173 0.0000 0.0000 8 0.0137 0.0000 0.0000 8 0.0262 0.0000 0.0000 9 0.0111 0.0000 0.0000 9 0.0165 0.0000 0.0000
B3 B3 i classique linéaire concave i classique linéaire concave 0 0.0112 0.0104 0.0110 10 0.0066 0.0001 0.0000 1 0.0338 0.0314 0.0111 Il 0.0097 0.0000 0.0000 2 0.0415 0.0188 0.0031 12 0.0104 0.0000 0.0000 3 0.0413 0.0196 0.0018 13 0.0084 0.0000 0.0000 4 0.0171 0.0083 0.0004 14 0.0060 . 0.0000 0.0000 5 0.0236 0.0054 0.0002 15 0.0071 0.0000 0.0000 6 0.0236 0.0027 0.0000 16 0.0077 0.0000 0.0000 7 0.0104 0.0015 0.0000 17 0.0034 0.0000 0.0000 8 0.0143 0.0009 0.0000 18 0.0049 0.0000 0.0000 9 0.0149 0.0003 0.0000 19 0.0060 0.0000 0.0000
TA B . 4.4 - Distribution du temps de la ruine
Soit T (r(1)) la variable aléatoire du moment où survient la ruine, pour les cinq cas, nous observons que
Comme présentée dans la section précédente, l'espérance du moment de la ruine est au

4.4. EXEMPLES 49
début de l'horizon de temps pour les cas linéaires et concaves. En combinant cette observation avec l'espérance de la sévérité de la ruine, nous pouvons conclure qu'une légère augmentation du surplus serait suffisante pour diminuer encore plus la probabilité de ruine. Tandis que pour le cas classique comme la ruine survient beaucoup plus tard et avec une sévérité espérée plus grande, c'est le niveau de prime qu'il faudrait ajuster pour diminuer la probabilité de ruine.
L'écart-type du moment de la ruine montre que la diminution du risque observé pour les cas linéaire et concave est réelle puisque ceux-ci sont beaucoup plus petits que dans le cas classique. L'écart-type de la sévérité de la ruine confirme similairement ces observations.
Les tableaux (4.5) et (4.6) présentent ces résultats.
Espérance Ecart-type classique linéaire concave classique linéaire concave
BI 3.0000 1.0000 0.0000 2.6533 1.3196 0.7013 B2 3.0000 1.0000 0.0000 2.6472 1.5163 0.8138 B3 6.0000 2.0000 0.0000 5.0029 1.7441 1.0098 B4 3.0000 1.0000 0.0000 2.5279 1.0143 0.5010 B5 3.0000 1.0000 0.0000 2.6360 1.1930 0.6052
TAB. 4.5 - Espérance et écart-type du monlent de la ruine
Espérance Ecart-type classique linéaire concave classique linéaire concave
BI -1.0640 -0.9947 -1.0197 0.9843 0.8822 0.8241 B2 -1.0629 -1.0292 -0.9921 0.9772 0.9167 0.7957 B3 -1.0490 -1.0811 -1.0482 0.9793 0.9032 0.7514 B4 -1.4195 -1.2222 -1.2774 1.1611 0.9973 0.9406 B5 -1.2905 -1.4006 -1.3141 1.1928 0.9991 0.8310
TAB. 4.6 - Espérance et écart-type de la sévérité de la ruine
4.4.5 Fonctions de répartition du surplus
La fonction de répartition du surplus à la période i, Ri, est donnée par
1 l
P(Ri S x) = l LIs (Ri ,s S x), l == 100,000, s= l
où la variable indicatrice Is (Ri,s S x ) vaut 1 si, pour la trajectoire s, le surplus à la période i est inférieure où égale à x .
Soit FI (x) et F2 (x) les fonctions de répartitions des variables aléatoires Xl et X 2 . Nous disons que Xl est stochastiquement inférieure à X 2 .si
P (Xl > x) :S P (X2 > x) ,'Vx.

4.4. EXEMPLES 50
Si Xl est stochastiquement inférieure à X 2 , cela indique que Xl donne généralement des montants de réclamations moins élevés que X 2 . Xl est donc moins risqué du point de vue de l'ordonnancement stochastique (Rolski et autres [41]). Cependant, si nous analysons une variable aléatoire comme le surplus, c'est l'interprétation inverse qu'il faut faire. Si le surplus RI est stochastiquement inférieure au surplus R2, alors RI est plus risqué que R2 car RI donne généralement un montant de surplus moindre que R2.
Sur l'horizon de temps étudié, à chaque période, la fonction de répartition du cas concave est stochastiquement inférieure à la fonction de répartition du cas linéaire. De même la fonction de répartition du cas linéaire est stochastiquement inférieure à la fonction de répartition du cas classique. Sauf pour t = 0 où, par constructions des exemples, ces trois cas ont des fonctions de répartition similaires.
Les graphiques (4.1) à (4.5) illustrent ce comportement de la fonction de répartition du surplus R.
Le cas concave produit ainsi un niveau de surplus supérieur aux. deux autres cas. Ceci semble montrer que le cas concave est celui qui permet de mieux contrôler le risque. Nous verrons dans la section suivante ce qui explique ce comportement.
100% ,--------'-----=----,-,.-=-~~~~-~..l!-=-------,..i
. x'>< · /><"
;' )< 'f 90% +---------+-----.f----;',I-r------x'--~'----_____;__;
80% ·1-----
70% -I---------!-----I-
1 1
1
1 •
/ ?'-1
1 Y.
1 /
i
60% +---------1--1 I--><-x ---,------------11 '=----~-o --tou- s ----,
1 j - 5 - classique
" j •• - · · ·5 - linéaire
50% 1---------+-1-- 1 1 ; - - - 5 - concave
40% -1-------1--1- -)/ "_/ ----"---li i 1 ~:: ::::~::' 1 1
1 -J. 1 1
30% +----------+-1--1- I-~--~/--------~-
1 " : 20% -----------1-: . 1 " i - ,-: - -;-,x' /' 10% ______ -1_-1--'----__ <-/ ----,-'-'->< _' -----'1
/ ./ j ~--::. x · )( ~)(
O%~~ __ ~-*~~~~~~~~~~~~~~~~~~
-9 -7 -5 -3 -1 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35
FIG. 4.1 - Fonction de répartition du surplus pour BI
4.4.6 Espérances et écart-types
Par nature, les SALC introduisent un changement de la prime dans le temps. De même, ils entraînent un changement de la distribution des réclamations dans le temps.
Pour la prime espérée E (Ci) , nous observons dans le graphique (4.6) que les cas linéaire et concave produisent une plus grande prime espérée que le cas classique. Cependant, entre les cas concave et linéaire, c'est le cas linéaire qui produit la plus grande prime espérée. Ceci

4.4. EXEMPLES
/ )(
8o% r---------------f----~-~~---~--~x~· ------_+I--------------~ / '/.. ,
'J. 1 ,
70% r-------------~---~--~---;r--~------~;~--------------~
, ' , 1
60% r--------------~--/~~----r__+--------~----------------~
"
, 1
50% r-------------11--+-~~---/~--------~~~----------------~
1 1 1 1
40% +------------~-+--~----,'--+-------~i~------------------~ , 1
1 1
30% +-----------+-~-f_----~-~--------~,--------------------~ 1 :
1 .' 1
1 i. 1 20% r-----------/~~~~---+'~· --------~:~----~--------------~
/ ,/ 1
1 .: /' 10% r----------v-~~--~-~--------r_------------------------~
-7 -5 -3 -1 9 11 13 15 17 19 21 23 25 27 29 31 33 35
~-O-tous
--5 - classique
- - - . - ,5 - linéaire
- - - 5 - concave
--9 - classique - - ~. - ,9 - linéaire
- '* - 9 - concave
FIG. 4.2 - Fonction de répartition du surplus pour B2
90% +--------1----1
80% r-------~--~~~-~---L----------~~-------iL---------~
70% -'1------,
60% -J--------I- ---/
40% -1-----1
30%
20% -
• 1 /
1 .1 1
1 -J:
1 1 'f 1
:J. 1
/' 1
--~:------~ :fI
L-_________ '!-___ ---/-------------i ' : !
----~-----i~/ ----------------~1 1
'1-
___ '- ----L---• 1
xx>'- ~ l ' O% -.~~~~~~~~/~/~~~~x~x~x~~~~~~--x~~~~~~~~~~, 1
~-O-tous
---10 - classique
- - - - - , 10 - linéaire
- - - 10 - concave
--19 - classique
- -~. - , 19 -linéaire
- ... - 19 - concave
FIG. 4.3 - Fonction de répartition du surplus pour B3
51
s'explique par le fait que le cas concave produit une espérance des réclamations E (Ç"J moins grande. En d'autres termes, le cas concave contrôle plus efficacement le comportement des réclamations que les cas linéaires et classiques.
Cependant, mên1e si dans le graphique (4.8) nous avons le même comportement pour l'espérance de la somme des primes E (ni) et l'espérance de la somme des réclamations

4.4. EXEMPLES
1 1
1
1
1 80% +-------r--~-~--,_---~---~-----~ , ,
1
-J.
li " 70% ,-------~--f--~~-_,·---_7---_7~------~ 1 1 , x " 1
60% +------~-+_~_7---~---~----~------~ 1 J 1
1 1
J 50% +------T--~~~~-~~--~---_f-------~
40% -l---------J , , ,
, 1 ,
30% +--~--_+-r_+-~-~~--~---~--------~ , J ,
, i 1
20% ,~----~--f-~--~--~-----t'---------~ X
1
x .) 10% +----~r,~~--~---_+---~L/ ---------~
/ x)< /
O%~, ~~~Ç~~~~~~~~~~~r~~x~~~~~~~~~~~~~
~-O-tous
--5 - classique
- - -" ,5 -linéaire
- - - 5 - concave
--9 - classique - , te' , . 9 - linéaire
- * - 9 - concave
FIG. 4.4 - Fonction de répartition du surplus pour B4
100% ,-----------:::;;>~-----=~-:-;a::~--........ t--.x-.x~~~' ~~-i
1 90% +--------1---1
80% -+--------1
70% -1--------1----1
'1. ,
1
.J. 1
1
.~~-~----~--~-J.~---------
/ x,' !
60% -1-------1- --1 -- ---::---; ~:'-----/"'--'--------;11 ~-, _-, ,-. ~-:-~~-~:-:i~-~u-e l 1 ~'--___ L-' ----------i' 1---5 - concave 1 50% -1----------1-1
" " i --9 - classique 1
l '1- ; " t(" ' 9 - linéaire 40% ~-----.--__I__,
1 , . ,
, r
30% -------J-j---l-- _--!--___ ,L------ -L-------
20%
. 1 , 1
---~/ ----~---I----·-----~ 1
1
mro~w~~~N-O_N~~~w~oomO_N~v~~~~mO_N~v~w~romo_NMv~w~wmO_NMv~w~oom_ 1 1 lit 1 1 1 1 ...--..-..---..---...-..-----NNN N .NNN NNNf""') r')r'1 MM MMMMf"')"I:tv ..... vvvv .......... vlf>
- ... - 9 - concave
FIG. 4.5 - Fonction de répartitIon du surplus pour B5
52
E (Si) , le graphique montre une très nette diminution du risque dans le cas concave pour E (Si)' Le cas linéaire ne fait en effet pas beaucoup diminuer l'espérance de cette somme. Ceci est visible dans la réserve E (Ri ) puisque le niveau espéré de réserve est nettement plus élevé dans le concave que dans les autres cas.
Ce contrôle plus grand du risque entraîné par le cas concave est confirmé par l'écart-type

' 4.4. EXEMPLES 53
qui est le plus faible dans ce cas (4.7 et 4.9) Les graphiques (4.6) à (4.9) illustre ce comportement pour B3. Nous observons un com
portement similaire pour les 4 autres cas.
6,00 ,. .. _ ................... _._ ........................ .......... .. ...... _ .................... _ ....... ..................... __ .................. _ ............................. _ ......................................................... _ ... _ ... __ ........ _ .. ,
S,DO -t----------------------;---'-'~--=------;
4,00 -I------------=-::!~. =-:::.....:..-- .--.. -;..-.--------------------.; _ . .;..;,..;;..... ;.. . .;. .;:..-
...-------3,00 +-~~"ir.:"~---~--«---+<---------------l--«-_I--___ -~ ~.
2,00 -I-------''''''---..::=----------------------~
. 1< • •• • >< •• • 1< •• •• ,..
'"'' ' x",",," .. ·x . .. "* . . ,x","* .
'X ' " 'X"" x
~ -------------" --l ,DO -1--------------------------------.;
10 11 12 13 14 15 16 17 18 19
--Ozeta . classique
· . • •• Ozeta · linéaire
- - - Ozeta . concave
---Xi . classique ··O(·· ·Xi • linéaire
---Xi • concave
FIG. 4.6 - Évolution de E (Ci) et E (Çi) pour B3
2,00
1,80 1---------------------------
1,60
1C; ' --W' .. ·lL \
\ \
\..
'1< ... . ,. ------"~ . . 'x·~..,..c------
::: 1-------=--><-><-· ~ -. - - -. - ~- _. _ ~ __ • _ ~ _ __ • _ ~_. ~~c.c x ; r::..-':"-':"- O- ze- ta- ,-cl-as-siq- u-e '
· • . •• Ozeta · linéaire
1,00 - - - Ozeta . concave
--- Xi . classique
• • 0(.. Xi · linéaire
0,80 - "* - Xi . concave
0,60 -j----------------------------
0,40
0,20
------------- - ---------~- ----------- --::----...:...-~ - - - - - --D,DO .1.-.-::::. ___ ___.-......---.---,----------,..--__ -....__-----.--------'
10 11 12 13 14 15 16 17 18 19
FIG. 4.7 - Évolution de JVar (Ci) et JVar (Çi) pour B3

54
---''-- Pi - classique
- - 0- - . Pi - linéaire
- - - Pi - concave
--><- S - classique
- - .. - - . S - linéaire
- '* - S - concave
--R - classique
- - - - - . R - linéaire
- - - R - concave
10 11 12 13 14 15 16 17 18 19
FIG. 4.8 - Évolution de E (IIi), E (Si) et E (Ri) pour B3
7,00 ----- "'---,------,-------------------------------
6,00 I-----------------------~.......:....:~~~---'
5,00 -
x' ~
4 ,00 ____ __ _~: ~:X)~/~:/=--:....-"--~~~-_:_~~_-:_-:_/_,..-_/ __________ _
3,00 _ __ __ • .. ;y-~Y--'--~// ~ --r
,/~
--R - classique
- - - - - . R - linéaire
- - - R - concave
--S - classique
- - .. - - . S - linéaire
- '* - S - concave
--Pi - classique
- - • - - . Pi - linéaire
- ~ - Pi - concave
)1.' 2,00 -
. ,-' .
l ,DO ----
10 11 12 13 14 15 16 17 18 19
FIG. 4.9 - Évolution de JVar (IIi), JVar (Si) et JVar (Ri) pour B3
4.5 Comparaison
L'exemple présenté montre qu'il est possible de mieux contrôler le risque avec une probabilité de transition linéaire qu'avec une probabilité de transition classique. Le contrôle peut être encore meilleur avec une probabilité de transition concave. Cette amélioration du

4.5. COMPARAISON 55
contrôle se traduit par une diminution réelle de la probabilité de ruine et ce dans tous les cinq cas de figure considérés. Nous avons pu déterminer, avec la section sur les espérances et les variances, que cette amélioration du contrôle du risque provient de deux facteurs. D'une part, l'augmentation de la prime à chaque période, apportée par la règle de transition u, permet d'augmenter les réserves. D'autre part, la diminution de la sévérité des réclamations à chaque période, apportée par la probabilité de transition, permet de maintenir le niveau de réserves accumulées.
Les avantages des conclusions précédentes peuvent être modérés par le fait que nous avons . seulement utilisé une distribution Binomiale. Cependant, même si une distribution différente pour les réclamations est utilisée, le comportement général du système devrait rester le même, dans la mesure où le contrôle du risque est semblable. C'est-à-dire, avec une fonction de transition u monotone croissante et une probabilité de transition contrôlée de telle façon que la masse à 0 augmente entre chaque période.
Comparativement aux systèmes bonus-malus présentés dans le premier chapitre, les SALC partage beaucoup de . similarité. En particulier, une révision de la prime périodique est effectuée, en fonction d'une règle de décision établie à l'avance. Cependant, les systèmes bonus-malus prennent en compte de façon implicite le comportement des réclamations face à la révision périodique de la prime. Alors que les SALC explicitent ce comportement par la probabilité de transition. En ce sens, les SALC constituent un cadre plus précis d'analyse du comportement d'un risque.
Dans un contexte de réassurance, tel que présenté dans le deuxième chapitre, les SALC permettraient d'analyser des programmes de réassurance. En effet, dans un programme de réassurance, la prime de réassurance détermine la couverture dont la cédante va bénéficier dans la période. Comme la règle de transition u peut modéliser les primes de réassurance de chaque période, l'impact sur la distribution des réclamations P peut ainsi être analysé. Un programme optimal de réassurance pourrait être dét~rminé en choisissant adéquatement la règle de transition u.
Les résultats présentés montrent, nous l'espérons, que les SALC pourraient être très utiles en actuariat. La portée de cette utilité fera l'objet de futures recherches.

56
Chapitre 5
Conclusion
La théorie du risque permet d'analyser différents aspects d'un risque afin de pouvoir éventuellement l'assumer en totalité ou en partie. Ce partage de risque passe généralement par le choix d'un principe de prime qui permet d'associer une prime au risque. Dans l'introduction de ce mémoire, nous présentons certains principes de prime et certaines propriétés désirables pour un principe de prime. Malheureusement, il n'existe pas de principe de prime qui combine toutes les propriétés désirables. Le choix d'un principe dépend ainsi du contexte de l'analyse.
Pour les contextes où nous souhaitons réviser la prime en fonction de l'expérience de l'assuré, il est possible d'utiliser des principes de prime qui font dépendre implicitement la marge de sécurité de l'expérience de l'assuré. Dans ce mémoire, nous analysons plus en détail deux contextes où un tel principe de prüne se retrouve. Avec les systèmes Bonusmalus, nous considérons une approche classique à ce problème de révision de la prime. Avec. les systèmes aléatoires à liaisons complètes (SALC), nous introduisons une approche nouvelle à ce problème qui permet de déterminer des principes de prime optimaux dans certaines situations. Afin, de présenter les différentes difficultés et solutions relatives au calcul des principes de prime en tant que telle, nous présentons aussi une analyse des principaux produits de réassurance. Les méthodes de calcul exactes ainsi que les méthodes numériques pour évaluer la prime y sont présentées.
Les systèmes bonus-malus proposent une méthode de révision de la prime en assurance automobile, qui permet de recalculer périodiquement la prime en fonction de l'expérience de l'assuré. Ces systèn1es reposent sur la théorie des chaînes de Markov. Pour appliquer un tel système, nous déterminons un ensemble de classes de tarif et une matrice de transition de probabilité entre ces classes. La matrice de transition de probabilité dépend de la classe de tarif dans la période précédente et du nombre d'accidents responsables observés dans la période précédente.
En plus de réviser adéquatement la prime, ces systèmes doivent remplir trois conditions pour que leur application soit réussie. D'abord, de par leur influence directe sur les primes chargées, ils doivent induire un niveau de réserve approprié. Ensuite, la révision de la prime induite par le système doit effectivement induire une prime qui correspond au risque de l'assuré. Finalement, les corrections à la prime effectuées par le système doivent être raisonnables et ne pas entraîner une surtarification. Nous avons présenté différentes mesures d'efficacité

57
qui permettent de mesurer à quel point le système atteint ces conditions. Une conséquence immédiate de l'utilisation de ces systèmes est la présence d'un déductible
implicite appelée l'appétit pour les bonus. Un des grands défis de l'utilisation de ces systèmes est de maintenir un niveau raisonnable d'appétit pour les bonus .. Au cas contraire, le système ne parviendrait pas à constituer un moyen efficace de transfert du risque entre l'assuré et l'assureur. La quantification de ce déductible repose sur des analyses dynamiques complexes. La recherche de méthodes plus simples pour le quantifier faciliterait beaucoup la conception d'un système bonus-malus.
La réassurance propose des méthodes de transfert du risque qui permettent de diminuer l'impact d'un risque que la cédante appréhende. Par exemple, lorsque la cédante fait son entrée dans un nouveau marché, la réassurance quote-part est un bon moyen de diminuer le risque d'une insuffisance dans la tarification. L'optimalité et les bénéfices des différents contrats de réassurance sont bien connus. En particulier, l'optimalité des contrats stoploss et quote-part comparativement aux autres contrats. Du point de vue de la cédante, un contrat stop-Ioss est la solution optimale en ce sens que pour une même prime, c'est le contrat qui entraîne la plus petite variance du portefeuille. Cependant, cette optimalité ne va pas sans une surprime pour compenser l'augmentation du risque supporté par le réassureur. Parallèlement, le contrat quote-part constitue aussi un très bon moyen de transférer le risque, pour un coût moindre qu'un contrat stop-loss.
L'évaluation de la prime d'un contrat de réassurance est une des difficultés majeures lors de la détermination du besoin en réassurance. Cette difficulté se retrouve dans d'autres contextes, et la plupart des méthodes de calculs présentés peuvent s'appliquer à plusieurs situations de calcul de la prime. Nous présentons plusieurs méthodes d'approximation de la distribution de probabilités, qui constituent une très bonne alternative aux méthodes de calculs exactes. En effet, comme la précision de ces approximations est suffisante, elles peuvent être utilisées pour simplifier les calculs. En particulier, les approximations Gamma et Inverse-Gaussienne, dont les convolutions restent simples à évaluer.
Il serait intéressant d'étudier la performance de ces approximations dans le cadre d'une analyse de ruine en présence de réassurance et d'un contexte économique plus réaliste. En effet, une analyse d'un programme de réassurance sur un certain horizon de temps demande de prendre en compte l'inflation et le taux d'intérêt. Ces facteurs complexifient les calculs, mais sont généralement incontournables car ils peuvent influencer grandement le montant de la prime. Si les approximations performent bien, l'analyse en serait facilitée. Par exemple, déterminer un programme de réassurance qui minimise la probabilité de ruine sur un certain horizon de temps serait plus simple à effectuer.
Les systèmes aléatoires à liaisons complètes proposent une extension « naturelle » du modèle classique du risque. En plus du processus de prime et du processus des réclamations, ils introduisent une dépendance entre la distribution des réclamations et la prime chargée. À chaque période, la prime est révisée en fonction du montant des réclamations dans la période précédente et de la prime chargée dans la période précédente. Ensuite, la distribution de probabilité des réclamations est déterminée en fonction de cette prime révisée. Les SALC étendent donc le modèle classique du risque en introduisant une règle de transition pour la prime et une dépendance entre la prime et le montant des réclamations. Le niveau de complexité induit par ces systèmes fait généralement appel à la simulation pour effectuer le

58
calcul de la prime. En explicitant la règle de révision de la prime ainsi que la réaction de l'assuré suite à
ce changement, soit le changement dans la distribution des réclamations, ils introduisent une interaction plus réaliste dans le modèle. En ce sens, les systèmes aléatoires à liaisons complètes constituent un modèle dynamique du risque puisque, de période en période, le risque du système peut être contrôlé. Ceci est visible dans l'exemple numérique que nous avons présenté où, en spécifiant les différents paramètres du modèle, nous avons observé une nette diminution de la probabilité de ruine comparativement au modèle classique du risque. Cette diminution est apportée par une augmentation adéquate de la prime à chaque période et une diminution de la sévérité des réclamations.
Comparativement aux systèmes bonus-malus, les systèmes aléatoires à liaisons complètes partagent plusieurs similarités. Les deux systèmes introduisent une règle de révision de la prime et un changement dans la distribution de probabilité des réclamations suite à la révision de la prime. Cependant, les systèmes bonus-malus sont conceptuellement plus simples et s'appliquent plus facilement que les systèmes aléatoires à liaisons complètes. Toutefois, les SALC, de par leur nature dynamique de contrôle du risque rOéussissent un peu mieux à limiter « l'appétit pour les bonus ».
Mis à part les systèmes aléatoires à liaisons complètes, les systèmes bonus-malus et la réassurance sont des sujets classiques en théorie du risque. La recherche n'est actuellement pas aussi volumineuse qu'elle ne l'a été lors de l'établissement des bases théoriques de ces sujets. Cependant, il serait intéressant de pousser l'analyse de ces sujets dans un contexte économique à long terme. En ce sens, les systèmes aléatoires à liaisons complètes pourraient constituer un outil qui permet de mener à bien l'analyse.
Par exemple, en utilisant les méthodes d'approximation vues dans le chapitre sur la réassurance et les mesures d'efficacité présentées dans le chapitre des systèmes bonus-malus, il est possible d'appliquer les systèmes aléatoires à liaisons complètes à une grande variété de situations concrètes et de mesurer l'efficacité du système dynamique engendré. Par exen1ple, les SALC pourraient être utilisés pour analyser des systèmes bonus-malus où la matrice de transition de probabilité est remplacée par des règles de transition plus complexes.
Les systèmes aléatoires à liaisons complètes pourraient aussi être utilisés pour analyser un programme de réassurance à long terme. En effet, dans un programme de réassurance à long terme, la prinle de réassurance détermine la couverture dont la cédante va bénéficier pour la période. Comme les SALC peuvent modéliser la dépendance entre la prime de réassurance et le montant de réclamations dans la période, nous pouvons minimiser le montant de réclamations en choisissant judicieusement la règle de transition entre les primes de réassurance de chaque période.

BIBLIOGRAPHIE 59
Bibliographie
[1] Agapie, A., 1998, Modelling genetic algorithms : from Markov chains to dependence with complete connections, PPSN V, LNCS 1498, 3-12, Springer-Verlag, Berlin.
[2] Ammeter, H., Spreading of exceptional claims by means of an internaI stop-Ioss cover,
Asti!} Bulletin, vol. 2, no. 3, 380-387.
[3] Arrow, K., J., 1963, Uncertainty and the welfare of medical care, The American Economie Review, LIlI, 941-973.
[4] Artzner, P., Delbaen, F., Eber, J-M., Heath, D., 1999, Coherent measures of risk, Mathematical Finance, 9 (3), 203-228.
[5] Barnsley, lV1., F., Demko, S., G., Iterated f~nction systems and the global construction of fractals, Proc. Roy. Soc. London Serv., A., 1985, 339, 24-275.
[6] Benktander, G., 1977, On the rating of a special stop-Ioss cover, Astin Bulletin, vol. 9, no. 1 & 2,33-41.
[7] Borch, K., 1960, An attempt to determine the optimum amount of stop loss reinsurance, Transactions of the 16th Internatiqnal Congress of Actuaries, 597-610.
[8] Borch, K., 1969, The optimal reinsurance treaty, Astin Bulletin, vol. 5, no. 2, 293-297.
[9] Bowers, N., L., 1969, An upper bound on the stop-Ioss net premium- actuarial note, Transactions of the Society of Actuaries, 21, 211-217.
[10] Bowers, N., L., Gerber, H., U., Hickman, J., Jones, D., A., Nesbitt, C., 1997, Actuarial mathematics, Society of Actuaries.
[11] Bühlmann, H., 1980, An economic premium principle, ASTIN Bulletin 11(1),52-60.
[12] Bühlmann, H., 1984, The general economic premium principle, ASTIN Bulletin 14(1),13-22.
[13] Chaubey, Y. P., Garrido, J., Trudeau, S., 1998, On the computation of aggregate claims distributions: sorne new approximations, Insur : Math. and Econ., 23, 215-230.
[14] Denuit, M., Pitrebois, S., Walhin, J.-F., Marketing et Systèmes Bonus-Malus, Actu-L 3, 89-105, 2003.
[15] Dickson, D., C., M., 2004, Quota-share reinsurance, Encyclopedia of Actuarial Science, Wiley, 1361-1362.
[16] Dickson, D., C., M., Waters, H., R., 2006, Optimal dynamic rein-surance, Preprint, University of Melbourne, ePrints Repository, http :j jeprints.infodiv.unimelb.edu.aujarchivej00002192j.

BIBLIOGRAPHIE 60
[17] Fernandez, R., Maillard, G., 2005, Chains with Complete Connections: General Theory, Uniqueness, Loss of Memory and Mixing Properties, Journal of Statistical Physics, vol. 118, 3-4, 555-588, Springer.
[18] Goovaerts, M. J., Kass, R., Van Heerwarden, A. E., Bauwelinckx, T., 1990, Effective Actuarial Methods, North-Holland, Amsterdam.
[19] Goovaerts, M., L., Vyncke, D., 2004, Reinsurance forms, Encyclopedia of Actuarial Science, Wiley, 1403-1404.
[20] Herkenrath, U., 1994, Premium adjustment by generalized adaptive exponential smoothing, lnsurance : Mathematics and Economics, vol. 15, 2-3, 203-217.
[21] Holta:n, J., 2001, Optimal Loss Financing under Bonus-Malus Contracts, ASTlN Bulletin, Vol. 31, no. 1, 161-173.
[22] losifescu, M., Grigorescu, S., 1990, Dependence with complete connections and its applications, Cambridge U niverty Press.
[23] Kaas, R., 1993. How to (and how not to) compute stop-Ioss premiums in practice. lnsur. : Math. Econ.13, 241- 254ries, vol. 27.
[24] Kaas, R., Goovaerts, M., Dhaene, J., Denuit, M., 2004, Modern Actuarial Risk Theory, Springer Verlag.
[25] Krahnen, J., Weber, M., 2001, Generally Accepted Rating Principles : A Primer, Journal of Banking and Finance, Vol. 25, 3-23.
[26] Klugman, S., A., Panjer, H., H., Willmot, G., E., 1998, Loss Models : From data to decisions, Wiley.
[27] Lemaire, J. , 1977, Selection procedures of regression analysis applied to automobile insurance, Mitteilungen der Vereinigung Schweizerischer Versicherungsmathematiker, 143-160. .
[28] Lemaire, J., Zi, H., A Comparative Analysis of 30 Bonus-Malus Systems, ASTlN Bulletin, vol. 24, no. 2, 287-309.
[29] Lemaire, J., 1995, Bonus-Malus Systen1s in Automobile lnsurance, Kluwer Academic, Publisher, Boston.
)[30] Lemaire, J., 2004, Bonus-Malus system, Encyclopeadia of Actuarial Science, Wiley, New York, 184-191.
[31] Léveillé, G., Garrido, J., 2001, Recursive moments of compound renewal sums with discounted claims, Scan. Actuarial J., 2, 98-100.
[32] Léveillé, G., Garrido, J., 2001, Moments of compound renewal sums with discounted claims, lns Math. and Econ., 28, 27-23l.
[33] Léveillé, G., An actuarial model based on random systems with complete connections, Université Laval.
[34] Luong, A., Thompson, M., E., 1987, Minimum-distance methods based on quadratic distances for transforms, La Revue Canadienne de Statistique, vol. 15, no. 3, 239-25l.
[35] Luong, A., Doray, L. G., 2002, General quadratic distance methods for discrete distri,.. butions definable recursively, lnsur : Math. and Econ., 30, 2, 255-267.

BIBLIOGRAPHIE 61
[36] Mata, A., J. 2003, Surplus Treaty, Encyclopedia of Actuarial Science, Wiley, 1650-1652.
[37] Moreno, L, Vazquez, F. J., Watt, R., 2006, Can Bonus-Malus Allieviate Insurance Fraud?, The Journal of risk and Insurance, Vol. 73, No. 1, 123-151.
[38] Norman, M. F. 1972, Markov process and learning models, Academic Press, New York.
[39] Onicescu, O." Mihoc, G., 1935, Sur les chaînes de variables statistiques, Comptes Rendus de l'Académie des Sciences de Paris, 200, 511-512.
[40] Patrick, G., 2004, Reinsurance, Encyclopedia of Actuarial Science, Wiley, 1400-1403.
[41] Rolski, T., Schmidli, H., Schmidt, V., Tengels, J., 1998, Stochastic Processes for insurance and Finance, Wiley, New York.
[42] Ross, S., 2003,Introduction to Probability Models, Academic Press, eighth edition, New York.
[43] Reijen, R., Albers, W., Kallenberg, W. C.M., 2005, Approximations for stop-loss rein-surance premiums, Insur : Math. and Econ., 36, 237-250.
[44] Rytgaard, M., 2004, Stop-loss reinsurance, Encyclopedia of Actuarial Science, Wiley.
[45] Schmitter, H., Reinsurance pricing, Wiley, 1405-1410.
[46] Société de l'Assurance Automobile du Québec, Les points d'Inaptitude, http : j jwww.saaq.gouv.qc.cajdocumentsj documents _pdfjpermisjpoints _ inaptitude. php.
[47] Splitt, A., 2004, Nonproportional reinsurance, Encyclopedia of Actuarial Science, Wiley, 1191-1194.
[48] Iosifescu, M., Theodorescu, R., 1969, Random process and learning, Springer, New York.
[49] Walhin, J., F., Lampaert, L, 2005, On the optimality of proportional reinsurance, Scand. Act. Journal, vol. 2005, no. 3, 225-239.
[50] Young, V., 2004, Premium principles, Encyclopedia of Actuarial Science, Wiley.
Top Related