


![IMP - MML IMP - MML IMP - MML IMP - IPDU[SA-5] CVCZ [EA-3] [EA-5] ZRP E1 RDM ZRP RDM CZ OU I1 VT E1 RDM PTP PTP E1 ZRP RDM E1 RDM PTP PTP E1 CZ RDM CV RDM RDM E1 E1 CV CZ RDM CV …](https://static.fdocument.pub/doc/165x107/613f5e17a7a58608c268e102/imp-mml-imp-mml-imp-mml-imp-sa-5-cvcz-ea-3-ea-5-zrp-e1-rdm-zrp-rdm.jpg)




Languages
Pages
Legal

OFPPTROYAUME DU MAROC
DOMAINE : MECANIQUE ET RDMPARTIE I : COURS
SECTEUR : BTP
SPÉCIALITÉ : GROS ŒUVRE
NIVEAU : TECHNICIEN SPÉCIALISÉ.
20 MAI 2004
Office de la Formation Professionnelle et de la Promotion du Travail
DIRECTION RECHERCHE ET INGÉNIERIE DE FORMATION
SUPPORTS PEDAGOGIQUES
Modules concernés : 8; 9

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
REMERCIEMENT
La DRIF remercie les personnes qui ont contribué à l’élaboration du présent document.
Pour la conception :
M. Alain BONHOMME Expert SFERE France
Pour la validation :
M. Khalid BAROUTI Chef projet BTP
Mme Najat IGGOUT Directeur du CDC BTP
M. Saïd MOURTAJI Formateur
M. Alain BONHOMME Expert SFERE France
SFERE – OFPPT Page 2 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SOMMAIRE
REMERCIEMENT 2
1 - COURS ET APPLICATIONS 6
1. NOTION DE FORCE 7
1.1. Notion de force et de vecteur-force 7
1.2. Composantes d’une force 8
1.3. Coordonnées cartésiennes d’un force (Repésentation algébrique) 8
1.4. Exercices 9
2. NOTION DE MOMENT 11
2.1. Notion de moment 11
2.2. Moment d’une force par rapport à un point 11
2.3. Notion de couple 13
2.4. Moment résultant de plusieurs forces 14
2.5. Exercices 15
3. NOTIONS GÉNÉRALES SUR LA MÉCANIQUE 16
3.1. Définitions 16
3.2. Les actions mécaniques ou charges. 16
3.3. Exercices sur les actions mécaniques 18
3.4. Exercice sur les unités : 19
4. SYSTEMES EQUIVALENTS / REDUCTION DE SYSTEME (DE FORCES) 21
4.1. Systèmes de forces équivalents 21
4.2. Réduction d’un système de forces (en 1 point) 24
4.3. Notion de torseur 25
4.4. Exercices : Notion de résultante 26
4.5. Exercices : Notions de forces/moments/résultantes 27
5. ETUDE DES LIAISONS 29
5.1. Presentation 29
5.2. Effort transmissible par une liaison 29
5.3. Nombre d’inconnues induites par les liaisons 30
5.4. Exemples de differents types d’appuis de poutre 31
SFERE – OFPPT Page 3 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
6. CONDITIONS GENERALES DE L’EQUILIBRE 33
6.1. Hypothèses 33
6.2. But : 33
6.3. Notion d’action mécanique de liaison extérieure et intérieure à un système donné
33
6.4. Enoncé du principe Fondamental de la statique (P.F.S): 34
6.5. Cas particuliers : 34
6.6. Résolution d'un problème de statique : 35
6.7. Methode de resolution des problemes de statique 35
6.8. Le Degré Hyperstatique 35
6.9. Exercices : Degré Hyperstatique 35
6.10. Exercices d’applications du PFS 35
6.11. Diaporama 35
7. CENTRE DE GRAVITE 35
7.1. Cours élève 35
7.2. Exercices d’Applications : élève 35
7.3. Cours prof 35
7.4. Exercices d’Applications : prof 35
8. EQUILIBRE D’UN SYSTEME RETICULE 35
8.1. Définition 35
8.2. Méthode des nœuds 35
8.3. Méthode de RITTER 35
8.4. Applications 35
9. RDM : GÉNÉRALITÉS 35
9.1. But de la RDM. 35
9.2. Hypothèses de la RDM. 35
9.3. Notion de contrainte. 35
9.4. Répartition uniforme des contraintes (sur une section) 35
10. TRACTION SIMPLE ET COMPRESSION SIMPLE 35
10.1. Définitions. 35
10.2. Essai de traction 35
10.3. Applications : traction simple 35
10.4. Coefficient de Poisson : u 35
11. CISAILLEMENT SIMPLE 35
11.1. Définitions. 35
11.2. Contrainte de cisaillement ( En cisaillement simple). 35
11.3. Equation de déformation 35
11.4. Calcul pratique 35
11.5. Exercice d’application 35
11.6. Exercice Formatif 35
SFERE – OFPPT Page 4 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12. N, V, M 35
12.1. Généralités 35
12.2. Diagramme de N(x), V(x), M(x) Méthode de détermination. 35
12.3. Exercices 35
12.4. Diaporama 35
13. CARACTÉRISTIQUES DES SESSIONS 35
13.1. MOMENT STATIQUE 35
13.2. Moment quadratique 35
13.3. Changement de coordonnees ( th d’huygens) 35
13.4. Exercices 35
13.5. Moment quadratique polaire 35
14. CONTRAINTES DES POUTRES FLÉCHIES 35
14.1. Hypothèses. 35
14.2. Contraintes normales (dues à M(x). 35
14.3. Déformations. 35
14.4. Contraintes de cisaillement longitudinal (dues à V(x)) 35
14.5. Applications 35
15. FLEXION COMPOSÉE 35
15.1. Définition 35
15.2. Exemples 35
15.3. Contraintes normales 35
15.4. Contraintes Tangentielles 35
15.5. Excentricité de charge 35
15.6. Remarque 35
15.7. Exercices 35
16. LES FLÈCHES 35
16.1. Définition 35
16.2. Formulaire 35
16.3. Utilisation 35
17. POUTRE CONTINUE EN BETON ARME 35
17.1. Généralité 35
17.2. Méthode forfaitaire. Artb.6.2,21 page 149 35
17.3. Méthode CAQUOT 35
17.4. Méthode CAQUOT minorée. 35
17.5. Contrôle de beton 35
17.6. Diaporama 35
2 - : ANNEXES 35
SFERE – OFPPT Page 5 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
1 - COURS ET APPLICATIONS
SFERE – OFPPT Page 6 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
1. NOTION DE FORCE
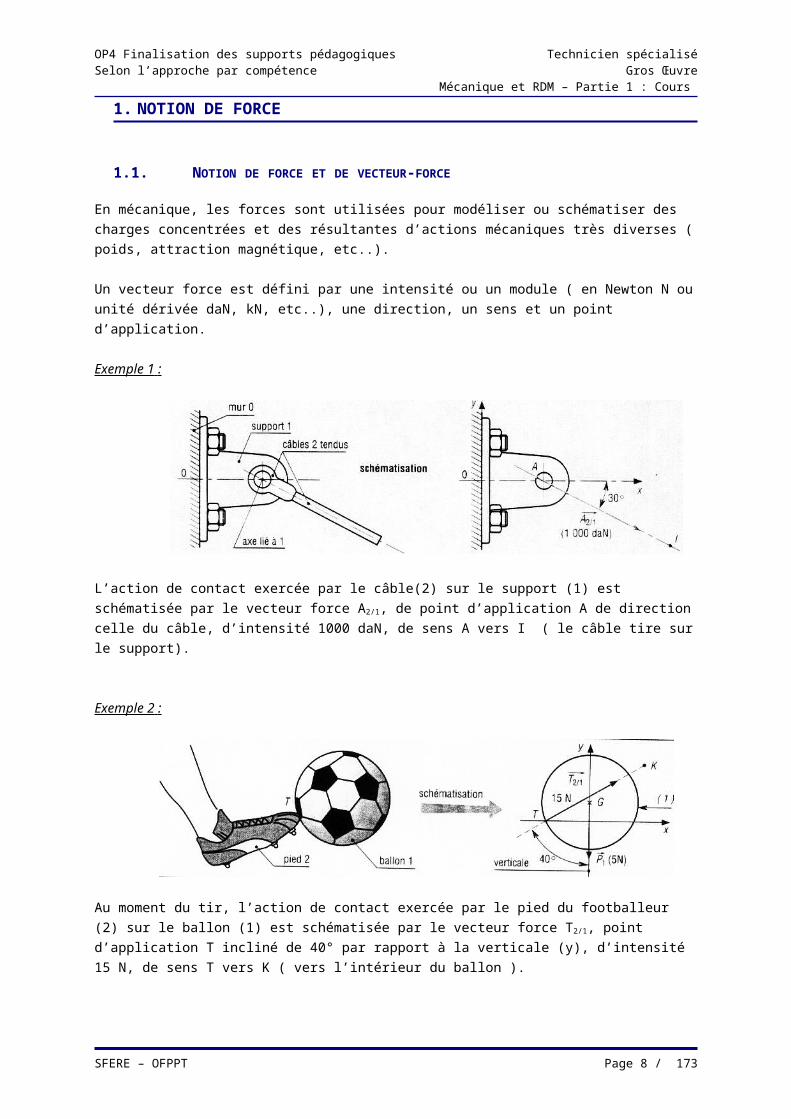
1.1. NOTION DE FORCE ET DE VECTEUR-FORCE
En mécanique, les forces sont utilisées pour modéliser ou schématiser des charges concentrées et
des résultantes d’actions mécaniques très diverses ( poids, attraction magnétique, etc..).
Un vecteur force est défini par une intensité ou un module ( en Newton N ou unité dérivée daN, kN,
etc..), une direction, un sens et un point d’application.
Exemple 1 :
L’action de contact exercée par le câble(2) sur le support (1) est schématisée par le vecteur force A2/1,
de point d’application A de direction celle du câble, d’intensité 1000 daN, de sens A vers I ( le câble
tire sur le support).
Exemple 2 :
Au moment du tir, l’action de contact exercée par le pied du footballeur (2) sur le ballon (1) est
schématisée par le vecteur force T2/1, point d’application T incliné de 40° par rapport à la verticale (y),
d’intensité 15 N, de sens T vers K ( vers l’intérieur du ballon ).
Le poids du ballon est schématisé par le vecteur-poids P1, vertical (axe y), intensité 5N, sens du haut
vers le bas et de point d’application G, le centre de gravité du ballon.
SFERE – OFPPT Page 7 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
1.2. COMPOSANTES D’UNE FORCE
Une force F agissant en un point A peut toujours être remplacée par deux autres forces ou
composantes ( U et V ) agissant au même point et vérifiant la condition F = U + V
Les composantes sont les valeurs algébriques des projections de F sur un
1.3. COORDONNÉES CARTÉSIENNES D’UN FORCE (REPÉSENTATION ALGÉBRIQUE)
On peut considérer les coordonnées cartésiennes Fx et Fy comme étant des composantes
orthogonales particulières de la force F dans les directions x et y. (F(x) ) horizontale et (F(y)) verticale
Elles sont positives si elles sont orientées dans la même direction que ox et oy (négative dans le cas
contraire.
FA
Exemple : coordonnées cartésiennes de la force A 2/1.
Ax = A2/1cos30° = 1000 x 0.866 = 866daN
Ay = -A2/1sin30° = -1000 x 0.5 = -500daN
║A2/1║ = 866² + 500² = 1000
SFERE – OFPPT Page 8 / 137
Fy
ox
FA(x)
FA(y)
AFA(y)
FA(x)

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
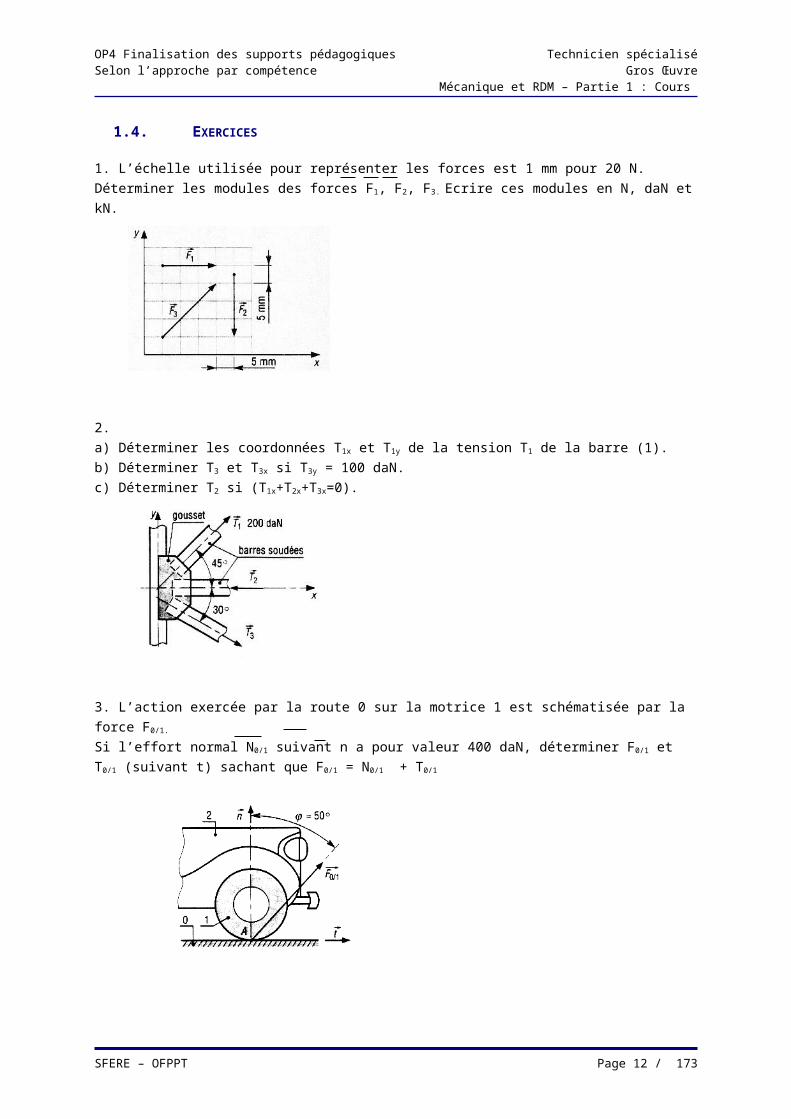
1.4. EXERCICES
1. L’échelle utilisée pour représenter les forces est 1 mm pour 20 N.
Déterminer les modules des forces F1, F2, F3. Ecrire ces modules en N, daN et kN.
2.
a) Déterminer les coordonnées T1x et T1y de la tension T1 de la barre (1).
b) Déterminer T3 et T3x si T3y = 100 daN.
c) Déterminer T2 si (T1x+T2x+T3x=0).
3. L’action exercée par la route 0 sur la motrice 1 est schématisée par la force F0/1.
Si l’effort normal N0/1 suivant n a pour valeur 400 daN, déterminer F0/1 et T0/1 (suivant t) sachant que
F0/1 = N0/1 + T0/1
SFERE – OFPPT Page 9 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
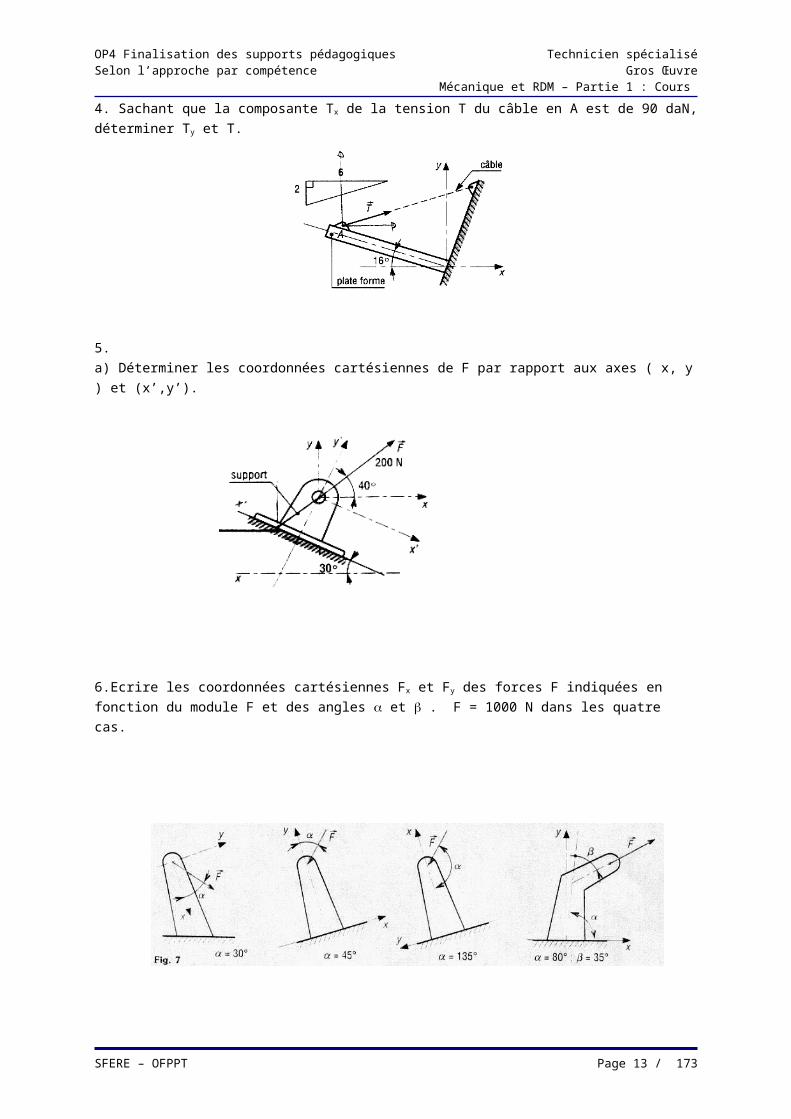
4. Sachant que la composante Tx de la tension T du câble en A est de 90 daN, déterminer Ty et T.
5.
a) Déterminer les coordonnées cartésiennes de F par rapport aux axes ( x, y ) et (x’,y’).
6.Ecrire les coordonnées cartésiennes Fx et Fy des forces F indiquées en fonction du module F et des
angles et . F = 1000 N dans les quatre cas.
SFERE – OFPPT Page 10 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
2. NOTION DE MOMENT
2.1. NOTION DE MOMENT
Les effets d’une force sur un solide dépendent de la position de la force par rapport à ce corps.
Exemple de la navette spatiale :
Si la Force F passe par le centre de gravité G de la navette, le vaisseau est animé d’un mouvement
de translation de même direction que F.
Si la force ne passe pas par G, le vaisseau est à la fois animé d’un mouvement de translation et d’un
mouvement de rotation ( orientation des moteurs).
Pour traduire avec précision les effets d’une force, compte tenu de sa position, il est nécessaire de
faire intervenir la notion de moments.
2.2. MOMENT D’UNE FORCE PAR RAPPORT À UN POINT
2.2.1. Définition
Le moment de la force F par rapport au pont A, noté MA(F), est égal au produit de F par le bras de
levier d :
MA(F)= F.d (d : distance entre A et F)
Bras de levier : longueur du segment de droite issu du point de
calcul et joignant orthogonalement la droite d’action de F
SFERE – OFPPT Page 11 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
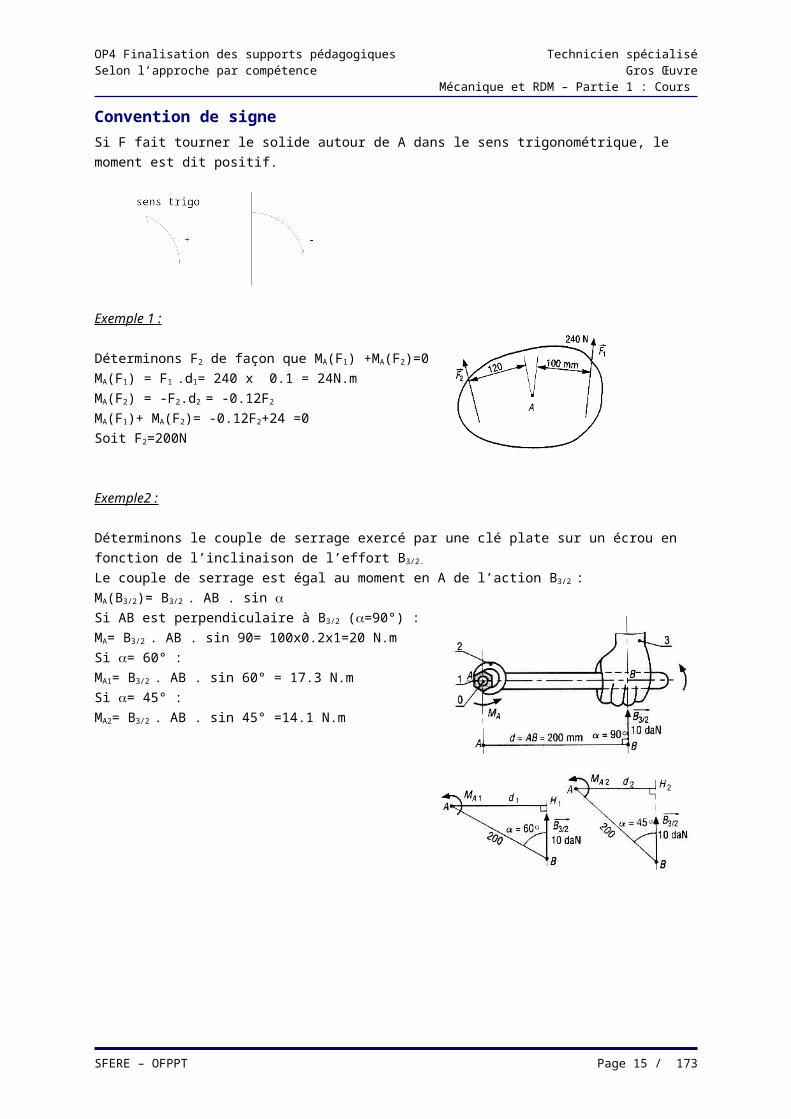
Convention de signe
Si F fait tourner le solide autour de A dans le sens trigonométrique, le moment est dit positif.
Exemple 1 :
Déterminons F2 de façon que MA(F1) +MA(F2)=0
MA(F1) = F1 .d1= 240 x 0.1 = 24N.m
MA(F2) = -F2.d2 = -0.12F2
MA(F1)+ MA(F2)= -0.12F2+24 =0
Soit F2=200N
Exemple2 :
Déterminons le couple de serrage exercé par une clé plate sur un écrou en fonction de l’inclinaison de
l’effort B3/2.
Le couple de serrage est égal au moment en A de l’action B3/2 :
MA(B3/2)= B3/2 . AB . sin Si AB est perpendiculaire à B3/2 (=90°) :
MA= B3/2 . AB . sin 90= 100x0.2x1=20 N.m
Si = 60° :
MA1= B3/2 . AB . sin 60° = 17.3 N.m
Si = 45° :
MA2= B3/2 . AB . sin 45° =14.1 N.m
SFERE – OFPPT Page 12 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
2.2.2. Théorème de Varignon
Le moment de la force F au point A est égal à la somme des moments de ses composantes U et V par
rapport au même point.
MA(F)= MA(U) + MA(V)
Pour notre cas: MA(F) = F.d = -U.dU + V.dV
Exemple :
Déterminons MA(F) de la Force F.
Fx = F cos60° = 1000 X 0.5 = 500 N
Fy = F sin60° = 1000 x 0.866 = 866 N
MA(F) = MA(Fx)+ MA(Fy)
= -500 x 0.1 + 866 x 0.16
= 88.6 N.m = F.d
Rq: Le calcul à partir des composantes est ici plus simple que l’application directe à partir de
F.d (détermination de d plus difficile).
2.3. NOTION DE COUPLE
2.3.1. Définition
Le moment engendré par deux forces égales et opposées ayant des
lignes d’action différentes constitue un couple (M).
L’intensité F.d du couple est indépendante du point O choisi ou de la
valeur de a. Elle ne dépend que de la distance d entre les deux forces
et de l’intensité F.
M= MO(F) + MO(-F) = F(a+b) – F.a = F.d
SFERE – OFPPT Page 13 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
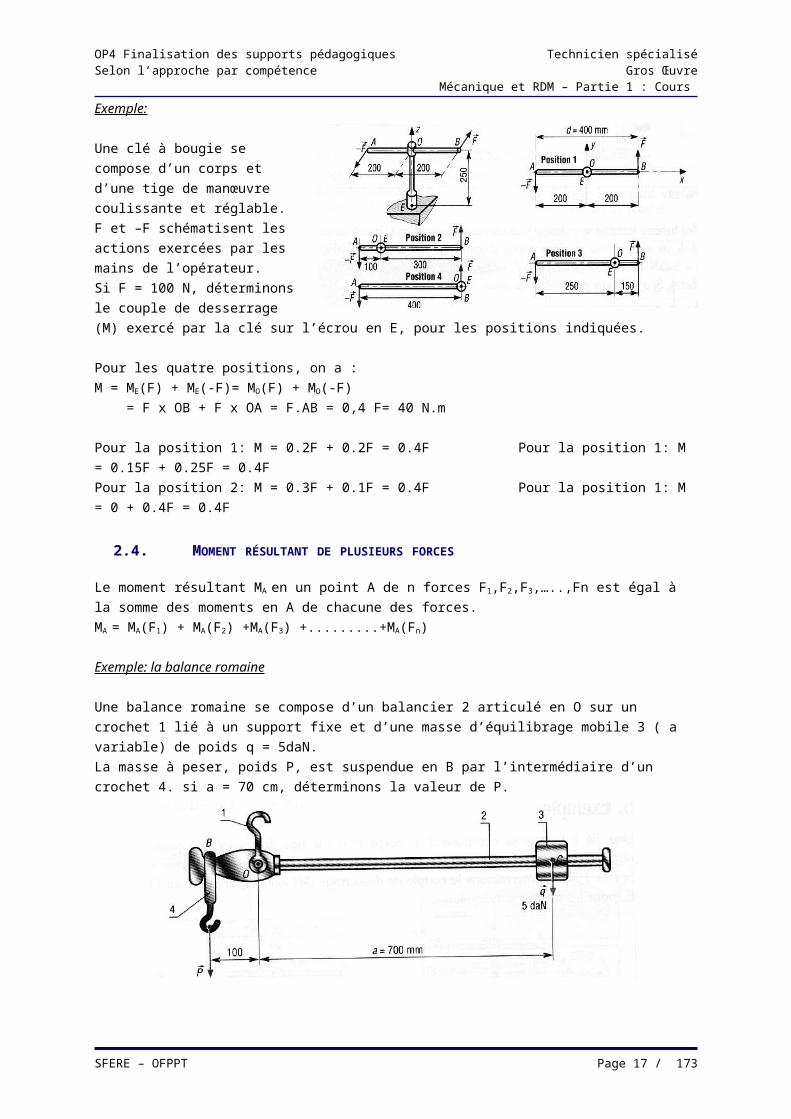
Exemple:
Une clé à bougie se compose d’un
corps et d’une tige de manœuvre
coulissante et réglable.
F et –F schématisent les actions
exercées par les mains de
l’opérateur.
Si F = 100 N, déterminons le
couple de desserrage (M) exercé
par la clé sur l’écrou en E, pour les
positions indiquées.
Pour les quatre positions, on a :
M = ME(F) + ME(-F)= MO(F) + MO(-F)
= F x OB + F x OA = F.AB = 0,4 F= 40 N.m
Pour la position 1: M = 0.2F + 0.2F = 0.4F Pour la position 1: M = 0.15F + 0.25F = 0.4F
Pour la position 2: M = 0.3F + 0.1F = 0.4F Pour la position 1: M = 0 + 0.4F = 0.4F
2.4. MOMENT RÉSULTANT DE PLUSIEURS FORCES
Le moment résultant MA en un point A de n forces F1,F2,F3,…..,Fn est égal à la somme des moments
en A de chacune des forces.
MA = MA(F1) + MA(F2) +MA(F3) +.........+MA(Fn)
Exemple: la balance romaine
Une balance romaine se compose d’un balancier 2 articulé en O sur un crochet 1 lié à un support fixe
et d’une masse d’équilibrage mobile 3 ( a variable) de poids q = 5daN.
La masse à peser, poids P, est suspendue en B par l’intermédiaire d’un crochet 4. si a = 70 cm,
déterminons la valeur de P.
Lorsqu’il y a équilibrage des deux masses, le moment résultant en O des poids P et q est nul.
MO = MO(P) + MO(q) = P x 0.1 – q x 0.7 = 0
D’où P = 7q = 7 x 5 = 35 daN
SFERE – OFPPT Page 14 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
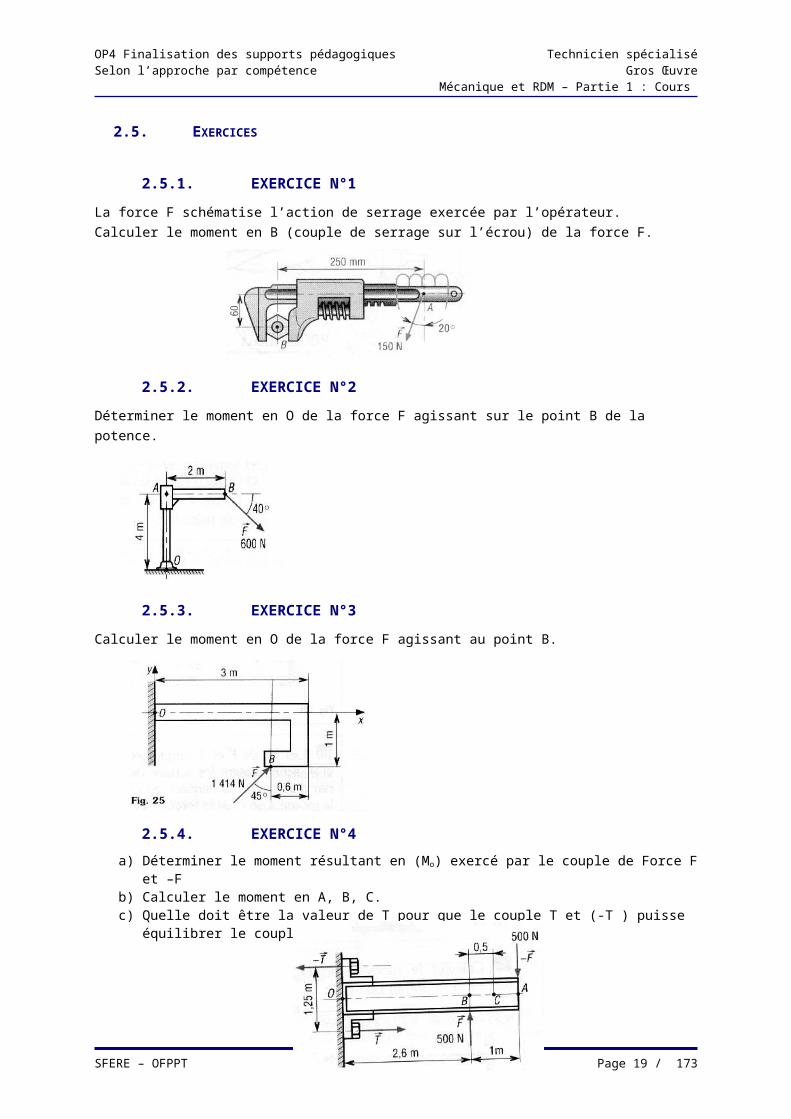
2.5. EXERCICES
2.5.1. EXERCICE N°1
La force F schématise l’action de serrage exercée par l’opérateur.
Calculer le moment en B (couple de serrage sur l’écrou) de la force F.
2.5.2. EXERCICE N°2
Déterminer le moment en O de la force F agissant sur le point B de la potence.
2.5.3. EXERCICE N°3
Calculer le moment en O de la force F agissant au point B.
2.5.4. EXERCICE N°4
a) Déterminer le moment résultant en (Mo) exercé par le couple de Force F et –Fb) Calculer le moment en A, B, C.c) Quelle doit être la valeur de T pour que le couple T et (-T ) puisse équilibrer le couple
précédent ?
SFERE – OFPPT Page 15 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
3. NOTIONS GÉNÉRALES SUR LA MÉCANIQUE
3.1. DÉFINITIONS
3.1.1. Buts de la Mécanique:
- Etudier l'équilibre des solides (statique) ou le mouvement (dynamique)
- Déterminer un état de contrainte et un état de déformation en tout point de la matière (R.d.M)
3.1.2. Définition du solide en statique.
En statique, un solide est un corps :
Homogène : la masse est répartie de façon homogène sur tout le volume.
Géométriquement parfait : les défauts de forme ne sont pas pris en compte dans la schématisation
du solide.
Indéformable : on ne tient pas compte des déformations du solide soumis à un effort.
Isotrope : le solide a les mêmes caractéristiques mécaniques dans toutes les directions.
3.1.3. Principe des actions mutuelles
Pour deux solides 0 et 1 en contact, l’action exercée par
le solide 0 sur le solide 1 est égale et opposée à l’action
exercée par le solide 1 sur le solide 0.
3.2. LES ACTIONS MÉCANIQUES OU CHARGES.
Les actions mécaniques représentent les efforts exercés sur des solides ou entre solides. Ces actions
mécaniques sont schématisées ou modélisées par des forces et des moments.
Il existe deux types d’actions mécaniques :
les actions à distance
les actions de contact
3.2.1. Les actions mécaniques à distance
On se limitera au poids d’un solide (effet de la gravité).
Le poids est représenté par un vecteur P :
Point d’application : centre de gravité G
Direction : verticale
Sens : vers le bas
Intensité : P = Mg (N)
M : masse en Kg
g = 9,81 m/s² : accélération de la pesanteur
ou attraction terrestre
SFERE – OFPPT Page 16 / 137
P
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Dans le domaine du Génie Civil, on prendra :
o pour un solide en surface (plancher) : le poids surfacique (relatif à une surface) N/m²
o pour un solide en longueur (poutre) : le poids linéaire (relatif à une longueur) N/m
Exemple :
Déterminer le poids surfacique d’un plancher de 18 cm d’épaisseur.
Déterminer le poids linéaire d’une poutre de section 50x20 cm.
Données : Poids volumique du béton armé 25 kN/m3
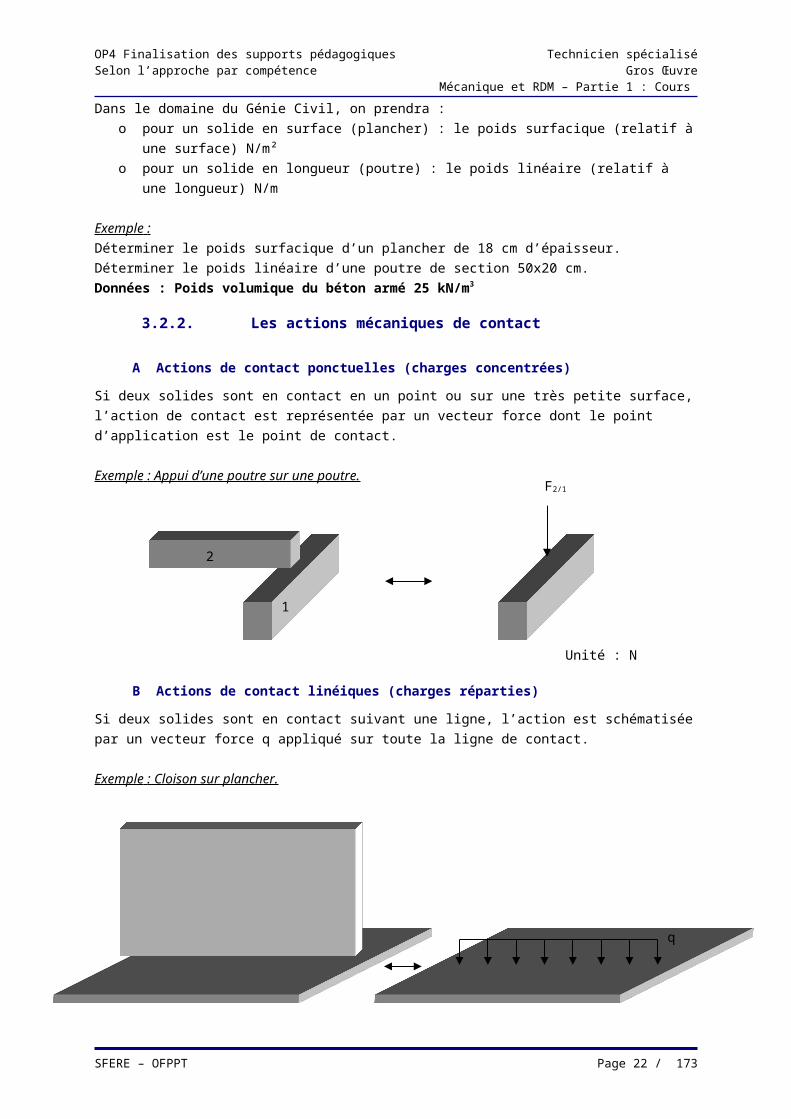
3.2.2. Les actions mécaniques de contact
A Actions de contact ponctuelles (charges concentrées)
Si deux solides sont en contact en un point ou sur une très petite surface, l’action de contact est
représentée par un vecteur force dont le point d’application est le point de contact.
Exemple : Appui d’une poutre sur une poutre.
Unité : N
B Actions de contact linéiques (charges réparties)
Si deux solides sont en contact suivant une ligne, l’action est schématisée par un vecteur force q
appliqué sur toute la ligne de contact.
Exemple : Cloison sur plancher.
Unité : N/ml
SFERE – OFPPT Page 17 / 137
q
1
2
F2/1

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
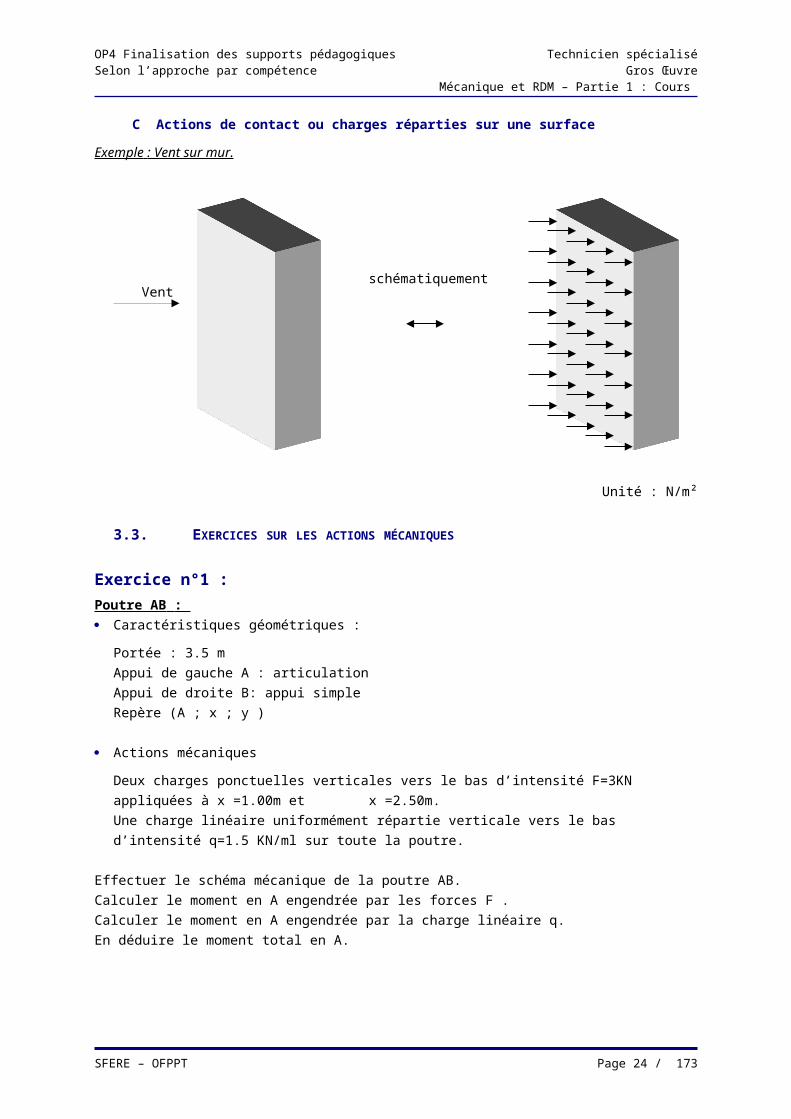
C Actions de contact ou charges réparties sur une surface
Exemple : Vent sur mur.
Vent
Unité : N/m²
3.3. EXERCICES SUR LES ACTIONS MÉCANIQUES
Exercice n°1 :
Poutre AB :
Caractéristiques géométriques :
Portée : 3.5 m
Appui de gauche A : articulation
Appui de droite B: appui simple
Repère (A ; x ; y )
Actions mécaniques
Deux charges ponctuelles verticales vers le bas d’intensité F=3KN appliquées à x =1.00m et x
=2.50m.
Une charge linéaire uniformément répartie verticale vers le bas d’intensité q=1.5 KN/ml sur toute la
poutre.
Effectuer le schéma mécanique de la poutre AB.
Calculer le moment en A engendrée par les forces F .
Calculer le moment en A engendrée par la charge linéaire q.
En déduire le moment total en A.
SFERE – OFPPT Page 18 / 137
schématiquement
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Poutre CD :
Caractéristiques géométriques :
Portée : 5.60m
Appui de gauche C : encastrement
Appui de droite D: libre
Repère ( C ; x ;y )
Actions mécaniques
Une charge ponctuelle verticale F vers le bas d’intensité 10KN appliquées à x =2.50m
Une charge linéaire uniformément répartie verticale vers le bas d’intensité q=1 KN/ml sur toute
la poutre.
Effectuer le schéma mécanique de la poutre CD.
Calculer le moment en C engendrée par les forces F .
Calculer le moment en C engendrée par la charge linéaire q.
En déduire le moment engendrée par F + q
3.4. EXERCICE SUR LES UNITÉS :
10000cm² = m² 0.800MN/m = KN/m
10 000 000cm3= m3 10KN/mm² = KN/m²
25KN/mm = KN/m 1MN/cm² = KN/m²
300N/m = KN/m
3.4.1. Exercice N°2
Soit une poutre AB en béton armé de section 50 x 20cm et de portée 6.00m.
Appui A : articulation
Appui B : appui simple
Poids volumique du béton armé : 25 KN/m3
1. Déterminer le poids P en KN de la poutre considérée.
2. En déduire le poids linéaire p en KN/m de la poutre.
3. Effectuer le schéma mécanique de la poutre AB.
4. Calculer le moment en A engendré par le poids de la poutre.
3.4.2. Exercice N°3
Soit un plancher en béton armé d’épaisseur 18 cm et de surface 200m².
1. Déterminer le poids surfacique Ps du plancher (KN/m²) .
2. Déterminer le poids P du plancher (KN).
SFERE – OFPPT Page 19 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
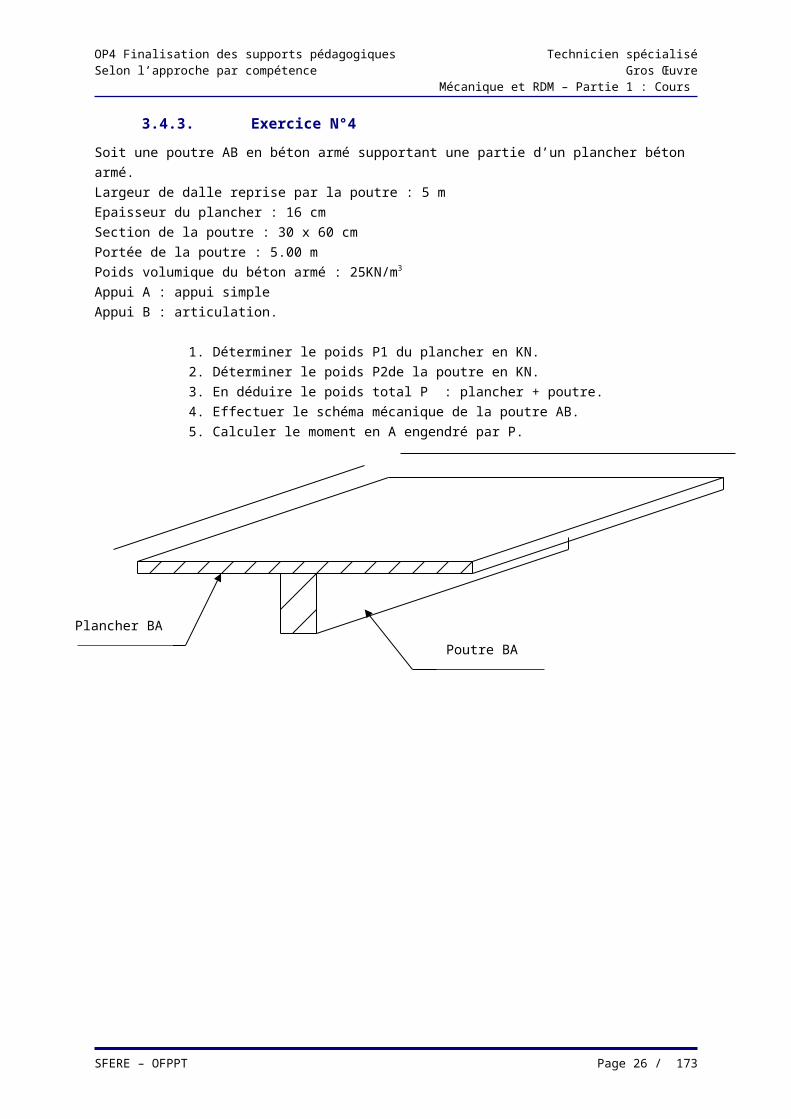
3.4.3. Exercice N°4
Soit une poutre AB en béton armé supportant une partie d’un plancher béton armé.
Largeur de dalle reprise par la poutre : 5 m
Epaisseur du plancher : 16 cm
Section de la poutre : 30 x 60 cm
Portée de la poutre : 5.00 m
Poids volumique du béton armé : 25KN/m3
Appui A : appui simple
Appui B : articulation.
1. Déterminer le poids P1 du plancher en KN.
2. Déterminer le poids P2de la poutre en KN.
3. En déduire le poids total P : plancher + poutre.
4. Effectuer le schéma mécanique de la poutre AB.
5. Calculer le moment en A engendré par P.
SFERE – OFPPT Page 20 / 137
Poutre BA
Plancher BA
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
4. SYSTEMES EQUIVALENTS / REDUCTION DE SYSTEME (DE FORCES)
4.1. SYSTÈMES DE FORCES ÉQUIVALENTS
4.1.1. Définitions.
Un système de forces est un ensemble de forces agissant simultanément sur un système matériel
(= solide ou ensemble de solide)
Des systèmes de forces différents sont dits équivalents si appliqués séparément à un solide ils
provoque les mêmes effets :
On dit également qu’ils ont les mêmes éléments de réductions.
C'est à dire :
Ils ont la même résultante et le même moment résultant en un point donné.
Forces = identique
Moment = identique
Remarque : Il est toujours possible de remplacer un système de forces par un autre s'il est équivalent
au précédent.
4.1.2. Exemples
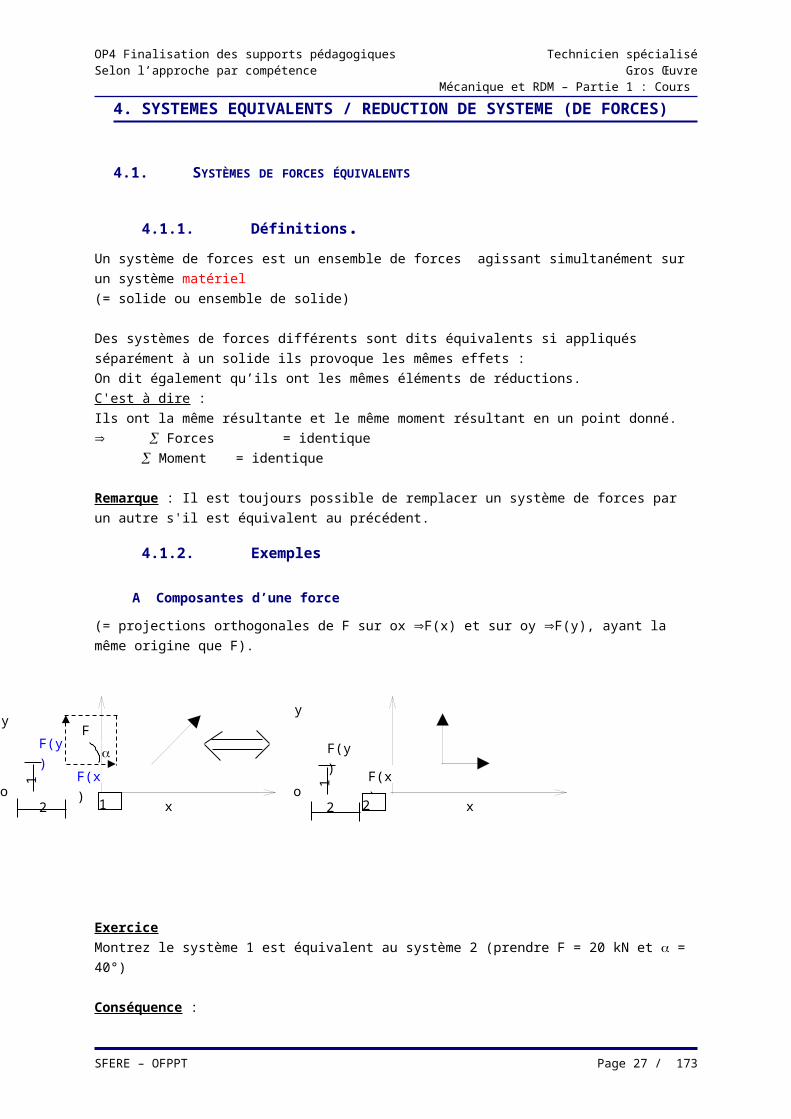
A Composantes d’une force
(= projections orthogonales de F sur ox F(x) et sur oy F(y), ayant la même origine que F).
Exercice
Montrez le système 1 est équivalent au système 2 (prendre F = 20 kN et = 40°)
Conséquence :
Le Mt F/o = F x OA est égal aussi à Mt Fx/o + Mt Fy/o
= -F(x) x A + F(y) x B
SFERE – OFPPT Page 21 / 137
y
ox
F
F(x)
F(y)
12
1
y
ox
F(x)
F(y)
2
1
2
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
En pratique :
Il sera plus simple de faire le moment d’une force en utilisant les valeurs de ses composantes, placées
à l’origine de F.
SFERE – OFPPT Page 22 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
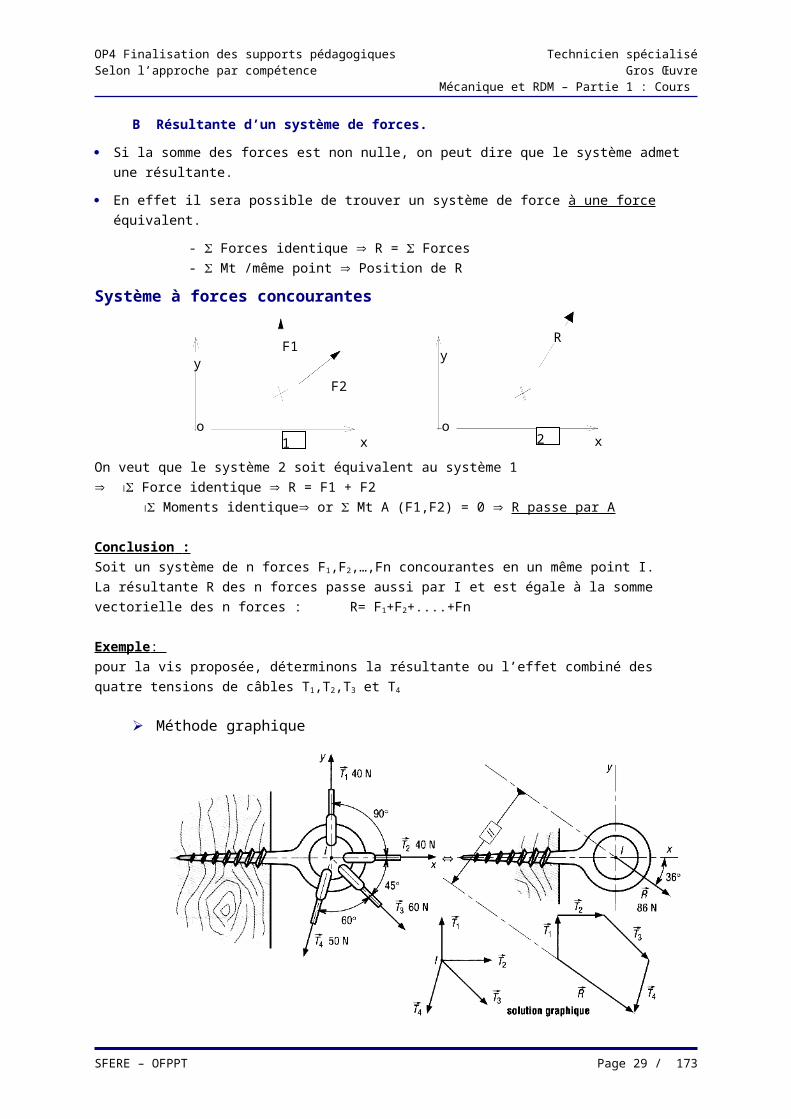
B Résultante d’un système de forces.
Si la somme des forces est non nulle, on peut dire que le système admet une résultante.
En effet il sera possible de trouver un système de force à une force équivalent.
- Forces identique R = Forces
- Mt /même point Position de R
Système à forces concourantes
On veut que le système 2 soit équivalent au système 1
Force identique R = F1 + F2
Moments identique or Mt A (F1,F2) = 0 R passe par A
Conclusion :
Soit un système de n forces F1,F2,…,Fn concourantes en un même point I.
La résultante R des n forces passe aussi par I et est égale à la somme vectorielle des n forces : R=
F1+F2+....+Fn
Exemple :
pour la vis proposée, déterminons la résultante ou l’effet combiné des quatre tensions de câbles
T1,T2,T3 et T4
Méthode graphique
SFERE – OFPPT Page 23 / 137
1 2
yy
F1
F2
R
o ox x
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Par le calcul :
R = T1+T2+T3+T4 donne en projection sur les axes x et y
Rx=
Ry=
║R║=
tan =
Système à forces parallèles
Soit le système 1 à deux forces : déterminer R dans le système 2 ( position et intensité)
Avec F1 = 10 KN et F2 = 40 KN
Exercice
Déterminer la résultante du système 1 (intensité, position)
Exemple
Pour l’exemple ci-contre :
Déterminons par le calcul la résultante de F1, F2 et F3
(intensité, position)
Résultante d’un système de forces planes quelconques
Si les forces connues ne sont pas toutes concourantes au même point, il est nécessaire de déterminer
graphiquement la ligne d’action de la résultante par approches successives, en combinant les forces
deux à deux.
SFERE – OFPPT Page 24 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
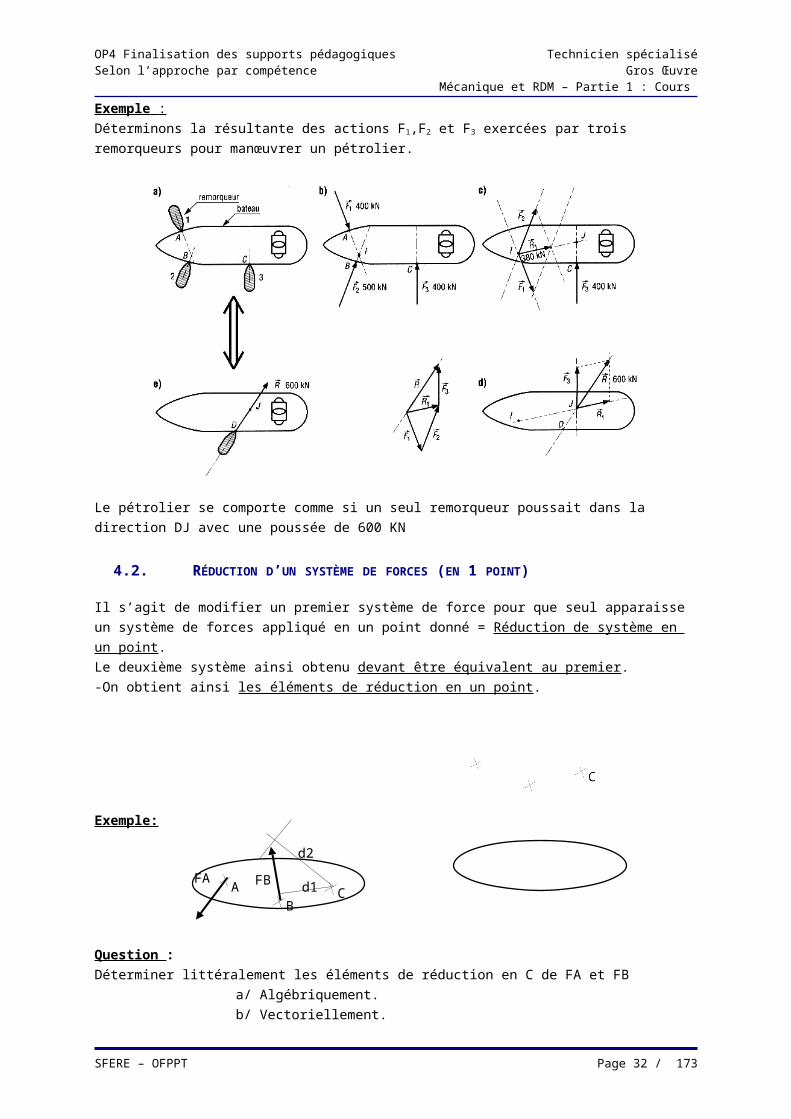
Exemple :
Déterminons la résultante des actions F1,F2 et F3 exercées par trois remorqueurs pour manœuvrer un
pétrolier.
Le pétrolier se comporte comme si un seul remorqueur poussait dans la direction DJ avec une
poussée de 600 KN
4.2. RÉDUCTION D’UN SYSTÈME DE FORCES (EN 1 POINT)
Il s’agit de modifier un premier système de force pour que seul apparaisse un système de forces
appliqué en un point donné = Réduction de système en un point.
Le deuxième système ainsi obtenu devant être équivalent au premier.
-On obtient ainsi les éléments de réduction en un point.
Exemple:
Question :
Déterminer littéralement les éléments de réduction en C de FA et FB
a/ Algébriquement.
b/ Vectoriellement.
SFERE – OFPPT Page 25 / 137
d1
d2
FA FBA
B
C
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
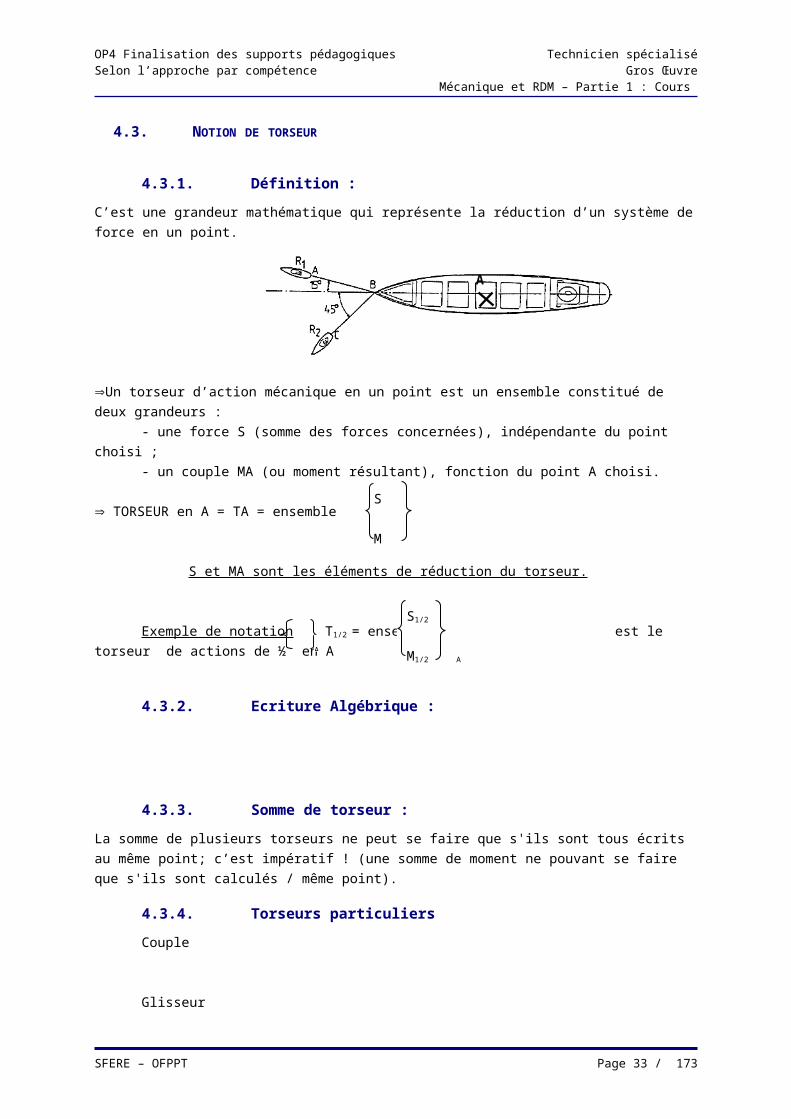
4.3. NOTION DE TORSEUR
4.3.1. Définition :
C’est une grandeur mathématique qui représente la réduction d’un système de force en un point.
Un torseur d’action mécanique en un point est un ensemble constitué de deux grandeurs :
- une force S (somme des forces concernées), indépendante du point choisi ;
- un couple MA (ou moment résultant), fonction du point A choisi.
TORSEUR en A = TA = ensemble
S et MA sont les éléments de réduction du torseur.
Exemple de notation T1/2 = ensemble: est le torseur de actions de ½ en A
4.3.2. Ecriture Algébrique :
4.3.3. Somme de torseur :
La somme de plusieurs torseurs ne peut se faire que s'ils sont tous écrits au même point; c’est
impératif ! (une somme de moment ne pouvant se faire que s'ils sont calculés / même point).
4.3.4. Torseurs particuliers
Couple
Glisseur
Torseur nul
SFERE – OFPPT Page 26 / 137
A
S
M A
A
S1/2
M1/2 A
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
4.4. EXERCICES : NOTION DE RÉSULTANTE
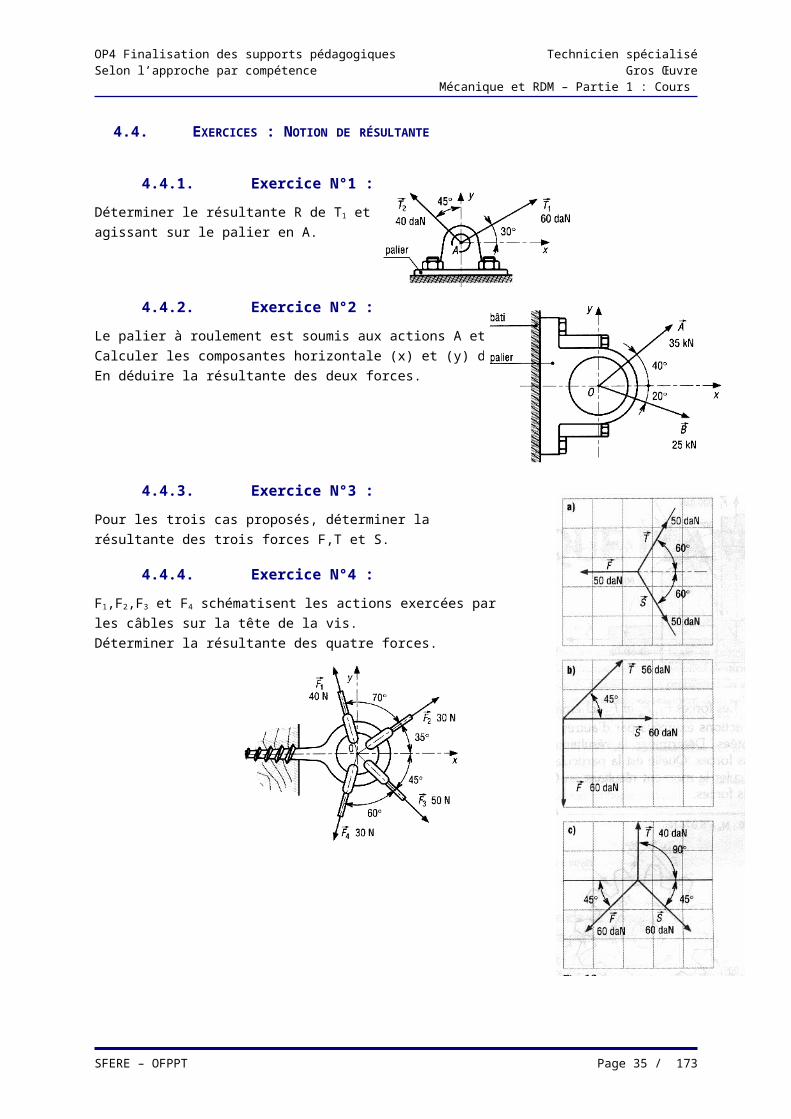
4.4.1. Exercice N°1 :
Déterminer le résultante R de T1 et T2
agissant sur le palier en A.
4.4.2. Exercice N°2 :
Le palier à roulement est soumis aux actions A et B.
Calculer les composantes horizontale (x) et (y) des forces A et B.
En déduire la résultante des deux forces.
4.4.3. Exercice N°3 :
Pour les trois cas proposés, déterminer la résultante des trois forces
F,T et S.
4.4.4. Exercice N°4 :
F1,F2,F3 et F4 schématisent les actions exercées par les câbles sur la
tête de la vis.
Déterminer la résultante des quatre forces.
SFERE – OFPPT Page 27 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
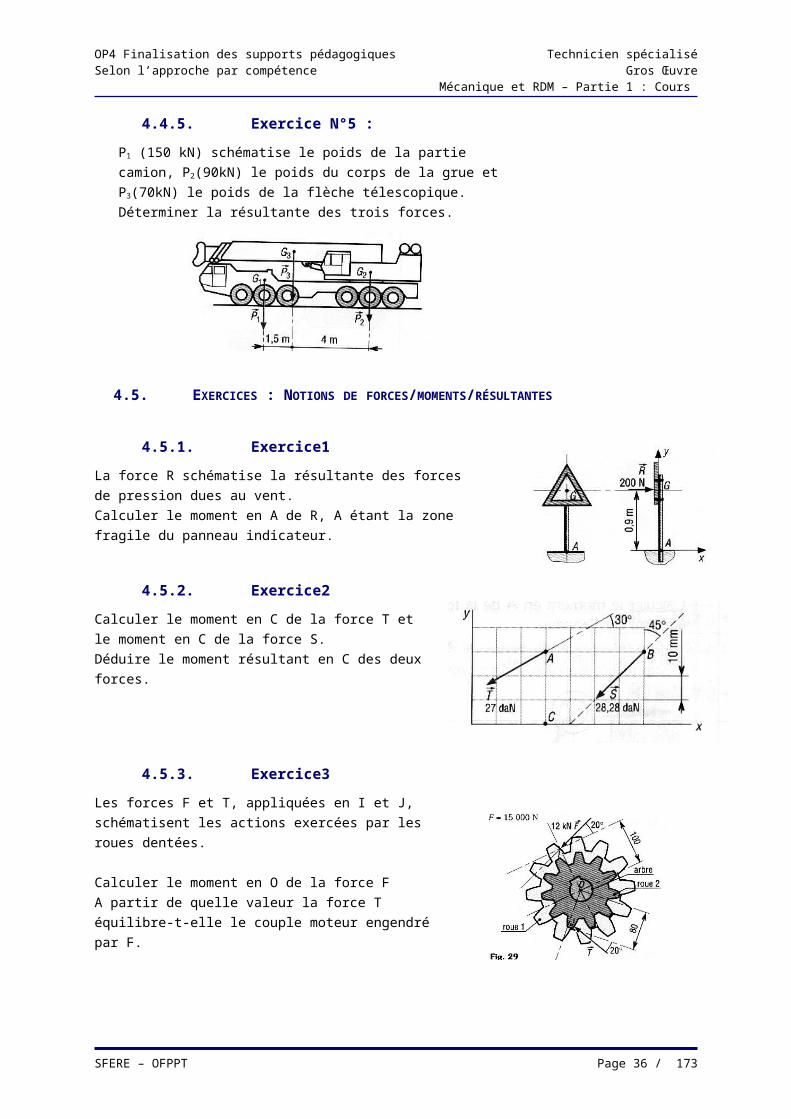
4.4.5. Exercice N°5 :
P1 (150 kN) schématise le poids de la partie camion, P2(90kN) le
poids du corps de la grue et P3(70kN) le poids de la flèche
télescopique.
Déterminer la résultante des trois forces.
4.5. EXERCICES : NOTIONS DE FORCES/MOMENTS/RÉSULTANTES
4.5.1. Exercice1
La force R schématise la résultante des forces de pression
dues au vent.
Calculer le moment en A de R, A étant la zone fragile du
panneau indicateur.
4.5.2. Exercice2
Calculer le moment en C de la force T et le moment en C
de la force S.
Déduire le moment résultant en C des deux forces.
4.5.3. Exercice3
Les forces F et T, appliquées en I et J, schématisent les
actions exercées par les roues dentées.
Calculer le moment en O de la force F
A partir de quelle valeur la force T équilibre-t-elle le couple
moteur engendré par F.
SFERE – OFPPT Page 28 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
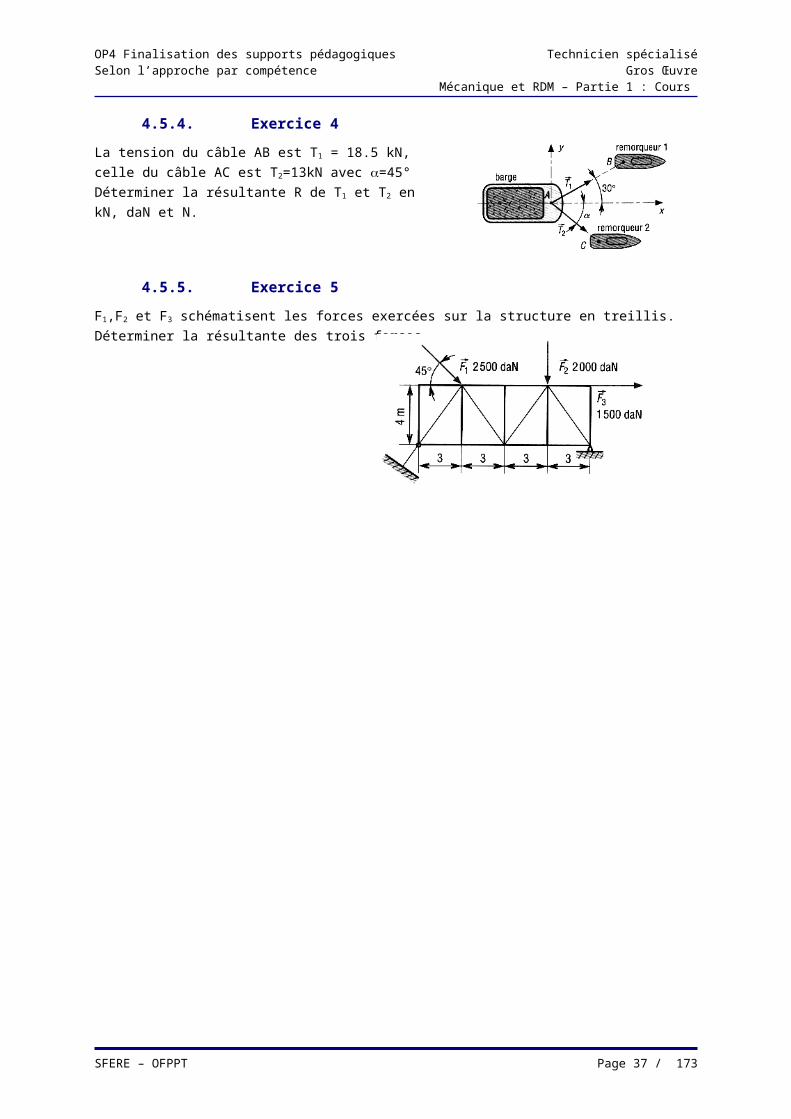
4.5.4. Exercice 4
La tension du câble AB est T1 = 18.5 kN, celle du câble
AC est T2=13kN avec =45°
Déterminer la résultante R de T1 et T2 en kN, daN et N.
4.5.5. Exercice 5
F1,F2 et F3 schématisent les forces exercées sur la structure en treillis.
Déterminer la résultante des trois forces.
SFERE – OFPPT Page 29 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
5. ETUDE DES LIAISONS
5.1. PRESENTATION
Dans le bâtiment, les liaisons entre solides se ramènent à trois familles principales :
Appui simple, articulation ou pivot et encastrement.
Chaque famille peut supporter ou transmettre des efforts différents.
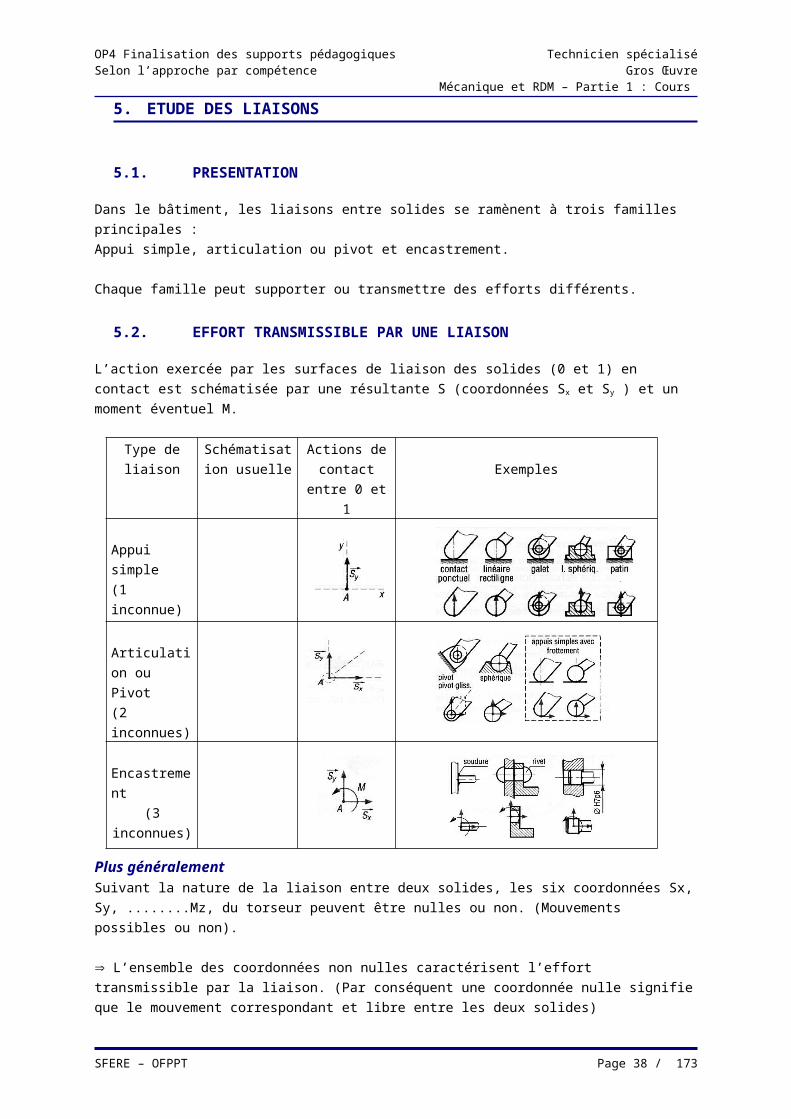
5.2. EFFORT TRANSMISSIBLE PAR UNE LIAISON
L’action exercée par les surfaces de liaison des solides (0 et 1) en contact est schématisée par une
résultante S (coordonnées Sx et Sy ) et un moment éventuel M.
Type de
liaison
Schématisation
usuelle
Actions de
contact entre
0 et 1
Exemples
Appui simple
(1 inconnue)
Articulation
ou Pivot
(2 inconnues)
Encastrement
(3 inconnues)
Plus généralement Suivant la nature de la liaison entre deux solides, les six coordonnées Sx, Sy, ........Mz, du torseur
peuvent être nulles ou non. (Mouvements possibles ou non).
L’ensemble des coordonnées non nulles caractérisent l’effort transmissible par la liaison. (Par
conséquent une coordonnée nulle signifie que le mouvement correspondant et libre entre les deux
solides)
Le nombre de degré de liberté correspond au nombre des composantes nulles du torseur associé.
SFERE – OFPPT Page 30 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
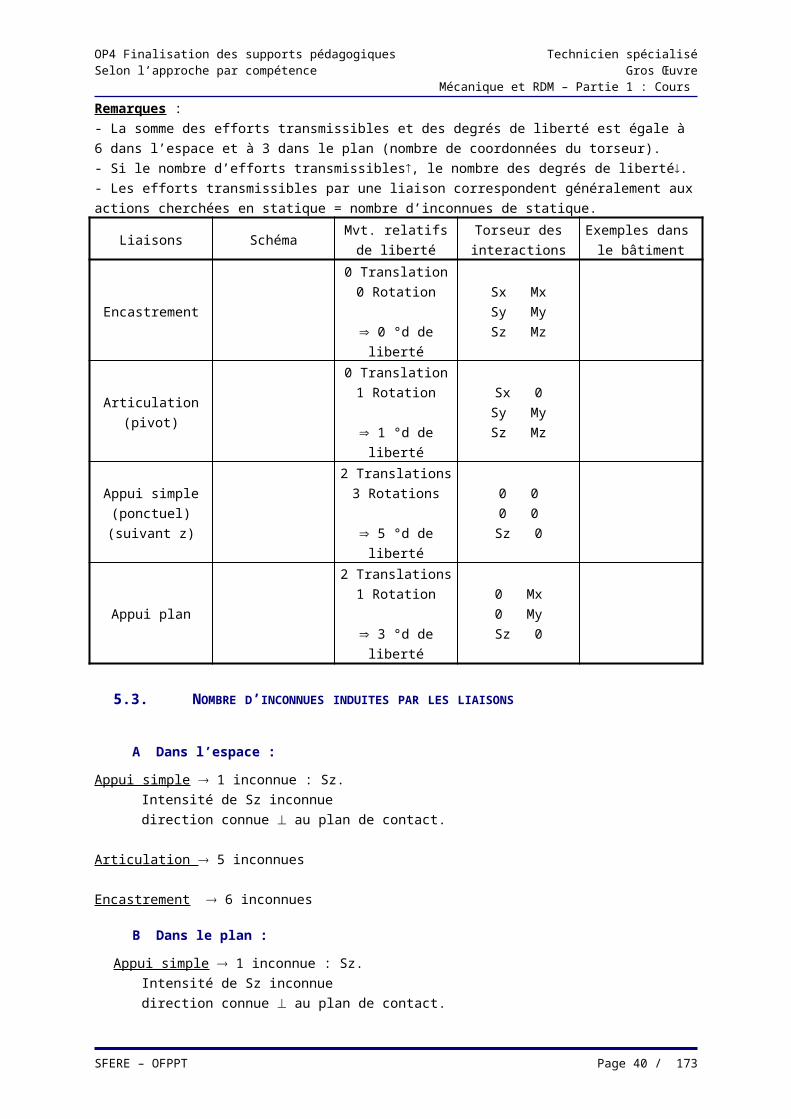
Remarques :
- La somme des efforts transmissibles et des degrés de liberté est égale à 6 dans l’espace et à 3 dans
le plan (nombre de coordonnées du torseur).
- Si le nombre d’efforts transmissibles, le nombre des degrés de liberté.- Les efforts transmissibles par une liaison correspondent généralement aux actions cherchées en
statique = nombre d’inconnues de statique.
Liaisons SchémaMvt. relatifs
de liberté
Torseur des
interactions
Exemples dans
le bâtiment
Encastrement
0 Translation
0 Rotation
0 °d de liberté
Sx Mx
Sy My
Sz Mz
Articulation
(pivot)
0 Translation
1 Rotation
1 °d de liberté
Sx 0
Sy My
Sz Mz
Appui simple
(ponctuel)
(suivant z)
2 Translations
3 Rotations
5 °d de liberté
0 0
0 0
Sz 0
Appui plan
2 Translations
1 Rotation
3 °d de liberté
0 Mx
0 My
Sz 0
5.3. NOMBRE D’INCONNUES INDUITES PAR LES LIAISONS
A Dans l’espace :
Appui simple 1 inconnue : Sz.
Intensité de Sz inconnue
direction connue au plan de contact.
Articulation 5 inconnues
Encastrement 6 inconnues
B Dans le plan :
Appui simple 1 inconnue : Sz.
Intensité de Sz inconnue
direction connue au plan de contact.
Articulation 2 inconnues : direction et intensité de S (= Sx, Sy) (Mz = 0)
Encastrement 3 inconnues : direction et intensité de S (= Sx, Sy) et intensité de Mz
SFERE – OFPPT Page 31 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
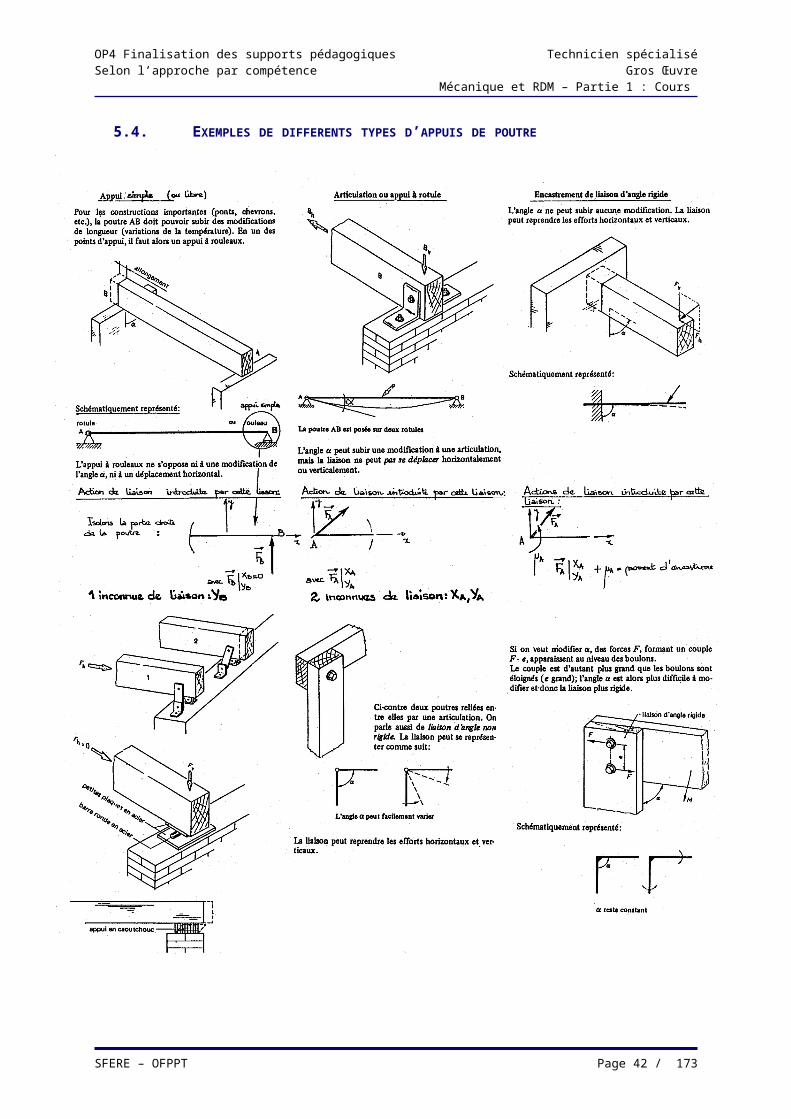
5.4. EXEMPLES DE DIFFERENTS TYPES D’APPUIS DE POUTRE
SFERE – OFPPT Page 32 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 33 / 137
A
B
C
D E3
2
1
F
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
6. CONDITIONS GENERALES DE L’EQUILIBRE
6.1. HYPOTHÈSES
Tous les corps étudiés sont indéformables.
Les coordonnées d'un point quelconque sont constantes.
Les supports des forces sont invariables.
6.2. BUT :
On veut déterminer les actions extérieures agissant sur un système, dans le but ultérieur d’appliquer
la R.d.M.
Un système étant composé d’un solide unique ou d’un ensemble de solides.
6.3. NOTION D’ACTION MÉCANIQUE DE LIAISON EXTÉRIEURE ET INTÉRIEURE À UN SYSTÈME DONNÉ :
Généralités :
- A chaque liaison s’exercent des actions mécaniques (Forces et moments) dites de liaison,
correspondant à l’action d’une barre sur une autre (plus généralement d’un système sur un autre au
niveau de cette liaison).
- Ces actions mécaniques sont dites :
Extérieures au système lorsqu’elles remplacent l’action d’une liaison que l’on vient de couper
pour isoler ce système.
Intérieures au système quand la liaison n’a pas été coupée.
Exemple :
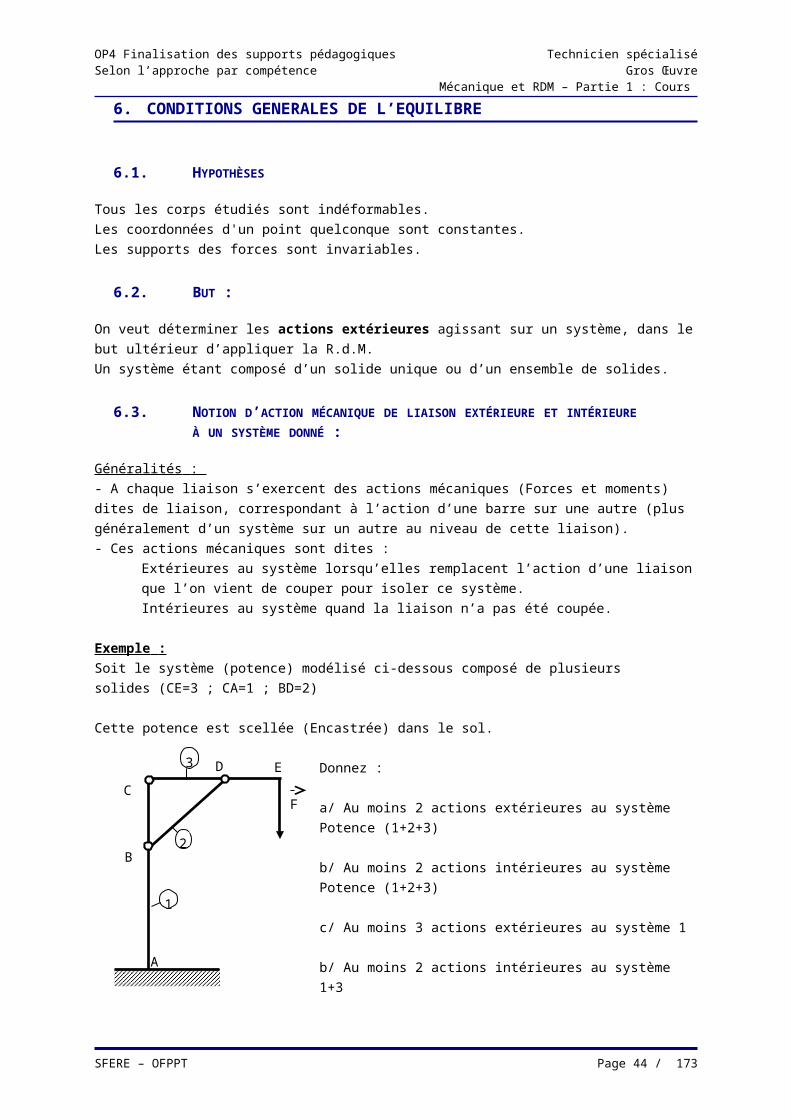
Soit le système (potence) modélisé ci-dessous composé de plusieurs solides (CE=3 ; CA=1 ; BD=2)
Cette potence est scellée (Encastrée) dans le sol.
Donnez :
a/ Au moins 2 actions extérieures au système Potence (1+2+3)
b/ Au moins 2 actions intérieures au système Potence (1+2+3)
c/ Au moins 3 actions extérieures au système 1
b/ Au moins 2 actions intérieures au système 1+3
SFERE – OFPPT Page 34 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
6.4. ENONCÉ DU PRINCIPE FONDAMENTAL DE LA STATIQUE (P.F.S):
Pour qu'un solide soit en équilibre (statique) il faut qu'il ne subisse aucun déplacement :
Pas de translation (dans n'importe quelle direction).
Pas de rotation
Donc un solide indéformable en équilibre sous l’action de n forces extérieures (F1,F2,….,Fn) reste en
équilibre si :
la somme vectorielle S de toutes les forces extérieures est nulle (pas de translation)
Fext = F1 +F2+ …..+Fn =0
En projection sur x et y : 2équations
Fx = F1x+F2x+…….+Fnx=0 (1)
Fy = F1y+F2y+……..+Fny=0 (2)
Le moment résultant MI en n’importe quel point I de toutes les forces extérieures est nul (Pas de
rotation).
MI(Fext) = MI(F1)+ MI(F2)+.......+ MI(Fn) =0 (3)
Dans le plan :
1/ F(x) = 0
2/ F(y) = 0
3/ M(z) = 0
3 équations de la statique 3 inconnues.
Dans l'espace :
1/ F(x) = 0 4/ M(x) = 0
2/ F(y) = 0 5/ M(y) = 0
3/ F(z) = 0 6/ M(z) = 0
6 équations de la statique 6 inconnues.
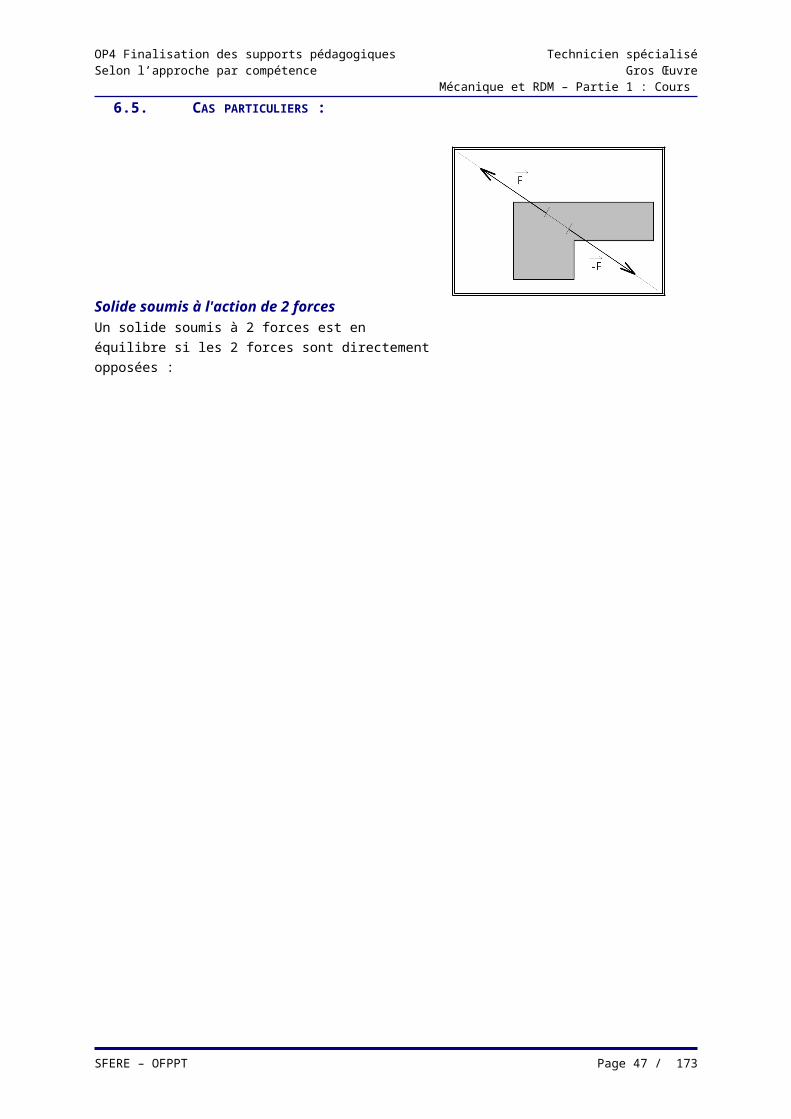
6.5. CAS PARTICULIERS :
Solide soumis à l'action de 2 forcesUn solide soumis à 2 forces est en équilibre si les 2 forces
sont directement opposées :
SFERE – OFPPT Page 35 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
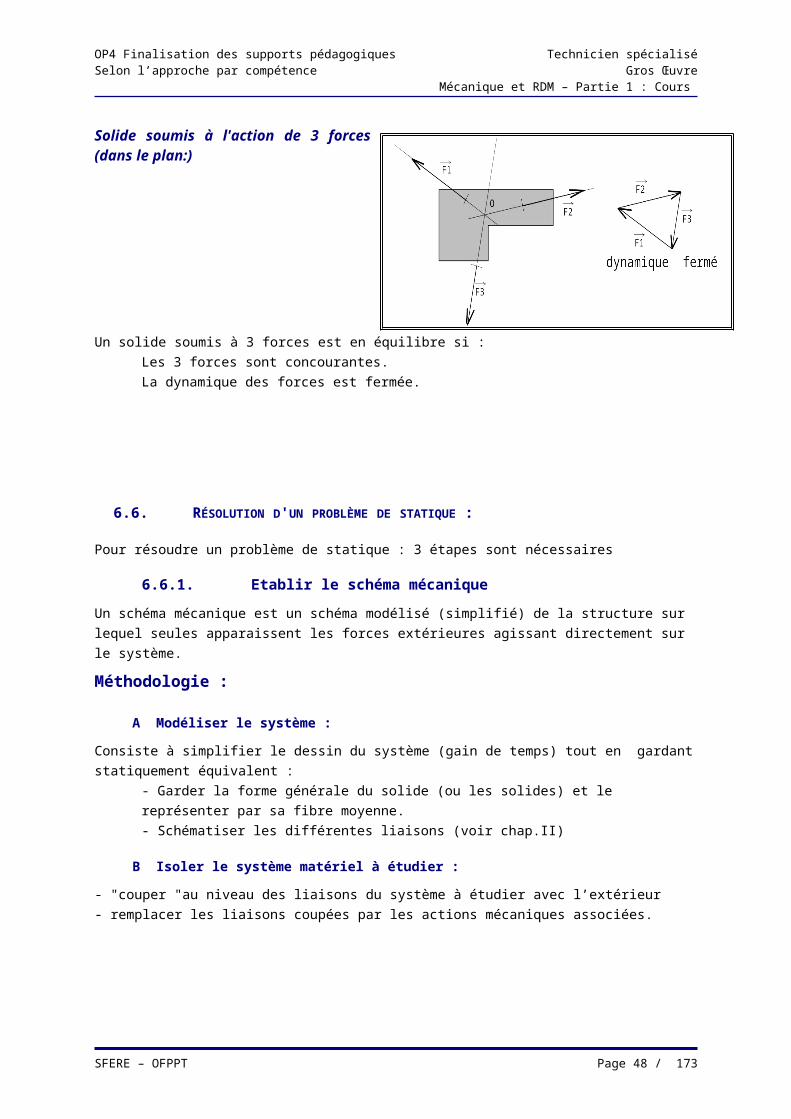
Solide soumis à l'action de 3 forces (dans le plan:)
Un solide soumis à 3 forces est en équilibre si :
Les 3 forces sont concourantes.
La dynamique des forces est fermée.
6.6. RÉSOLUTION D'UN PROBLÈME DE STATIQUE :
Pour résoudre un problème de statique : 3 étapes sont nécessaires
6.6.1. Etablir le schéma mécanique
Un schéma mécanique est un schéma modélisé (simplifié) de la structure sur lequel seules
apparaissent les forces extérieures agissant directement sur le système.
Méthodologie :
A Modéliser le système :
Consiste à simplifier le dessin du système (gain de temps) tout en gardant statiquement équivalent :
- Garder la forme générale du solide (ou les solides) et le représenter par sa fibre moyenne.
- Schématiser les différentes liaisons (voir chap.II)
B Isoler le système matériel à étudier :
- "couper "au niveau des liaisons du système à étudier avec l’extérieur
- remplacer les liaisons coupées par les actions mécaniques associées.
C Ajouter les actions extérieures :
- représenter les actions extérieures (charges d'exploitation, charges permanentes) par des vecteurs
forces (charges ponctuelles, charges réparties) ou des vecteurs moments.
- indiquer toutes les cotes nécessaires.
SFERE – OFPPT Page 36 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
6.6.2. Faire le bilan
- Faire le bilan des inconnues (I)
- Faire le bilan des équations possibles (E) dans notre exemple :
si I E résoluble.
I E non résoluble.
SFERE – OFPPT Page 37 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
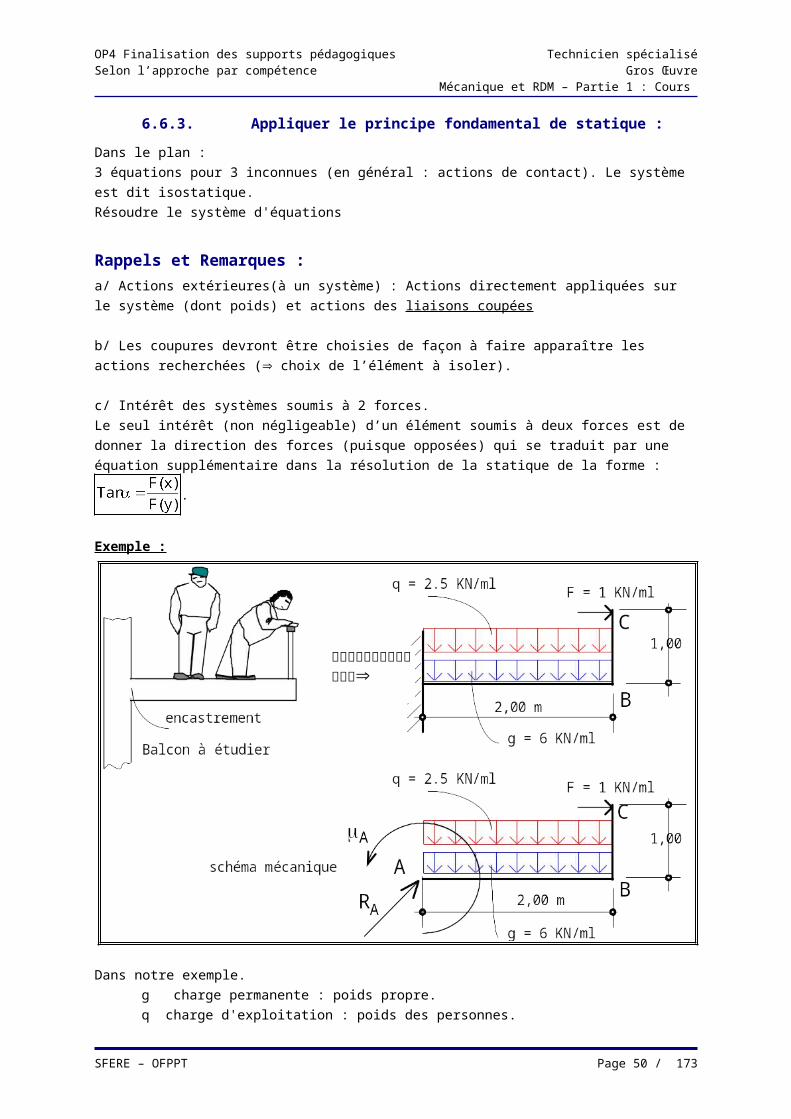
6.6.3. Appliquer le principe fondamental de statique :
Dans le plan :
3 équations pour 3 inconnues (en général : actions de contact). Le système est dit isostatique.
Résoudre le système d'équations
Rappels et Remarques :
a/ Actions extérieures(à un système) : Actions directement appliquées sur le système (dont poids) et
actions des liaisons coupées
b/ Les coupures devront être choisies de façon à faire apparaître les actions recherchées ( choix de
l’élément à isoler).
c/ Intérêt des systèmes soumis à 2 forces.
Le seul intérêt (non négligeable) d’un élément soumis à deux forces est de donner la direction des
forces (puisque opposées) qui se traduit par une équation supplémentaire dans la résolution de la
statique de la forme : .
Exemple :
Dans notre exemple.
g charge permanente : poids propre.
q charge d'exploitation : poids des personnes.
F charge d'exploitation horizontale.
SFERE – OFPPT Page 38 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
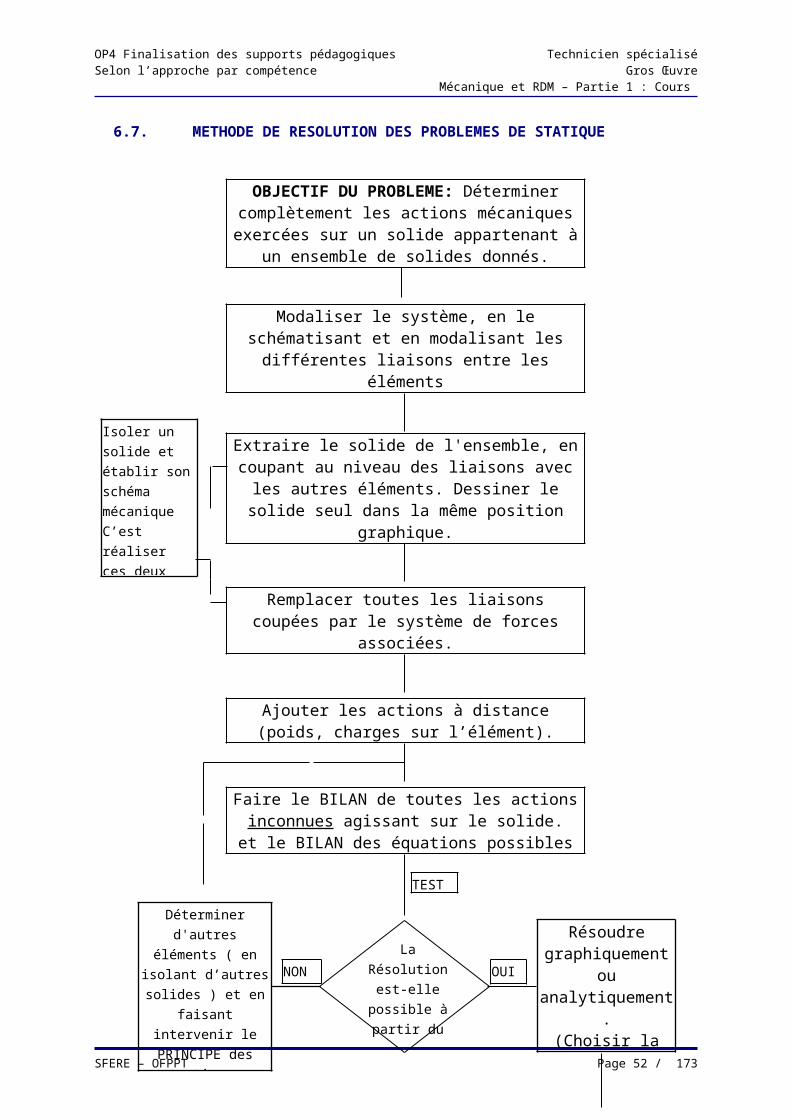
6.7. METHODE DE RESOLUTION DES PROBLEMES DE STATIQUE
OBJECTIF DU PROBLEME: Déterminer complètement les actions mécaniques exercées sur un solide appartenant à un ensemble de solides donnés.
Modaliser le système, en le schématisant et en modalisant les différentes liaisons entre les éléments
Extraire le solide de l'ensemble, en coupant au niveau des liaisons avec les autres éléments. Dessiner le
solide seul dans la même position graphique.
Remplacer toutes les liaisons coupées par le système de forces associées.
Ajouter les actions à distance (poids, charges sur l’élément).
Faire le BILAN de toutes les actions inconnues agissant sur le solide.
et le BILAN des équations possibles
RESULTATS : Le problème est terminé lorsque toutes les actions agissant sur le solide sont
entièrement connues.
SFERE – OFPPT Page 39 / 137
Déterminer d'autres
éléments ( en isolant
d’autres solides ) et
en faisant intervenir le
PRINCIPE des
actions mutuelles.
Exemple : éléments
biarticulés
Résoudre graphiquement ou analytiquement.
(Choisir la méthode la plus performante)
en appliquant le P.F.S.
a partir des
Isoler un solide
et établir son
schéma
mécanique
C’est réaliser
ces deux
étapes
La
Résolution est-elle
possible à partir du
bilan précédent
TEST
NON OUI
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
6.8. LE DEGRÉ HYPERSTATIQUE
Un solide, ou un ensemble de solides, qui possède des appuis ou des liaisons surabondantes par
rapport à ce qui est strictement nécessaire au maintien de l’équilibre, est dit statiquement
indéterminable ou hyperstatique.
Pour ce cas, les actions exercées ne peuvent pas être déterminées à partir des seules équations de la
statique.
Rappel :
Le PFS nous permet d’obtenir 3 équations :
Fext =0
En projection sur x et y 2 équations
M(Fext)=0 1 équation
notation : Ne : nombre d’équations fournies par le PFS
Ni : Nombre d’inconnues
Degré Hyperstatique DH : Ni -Ne
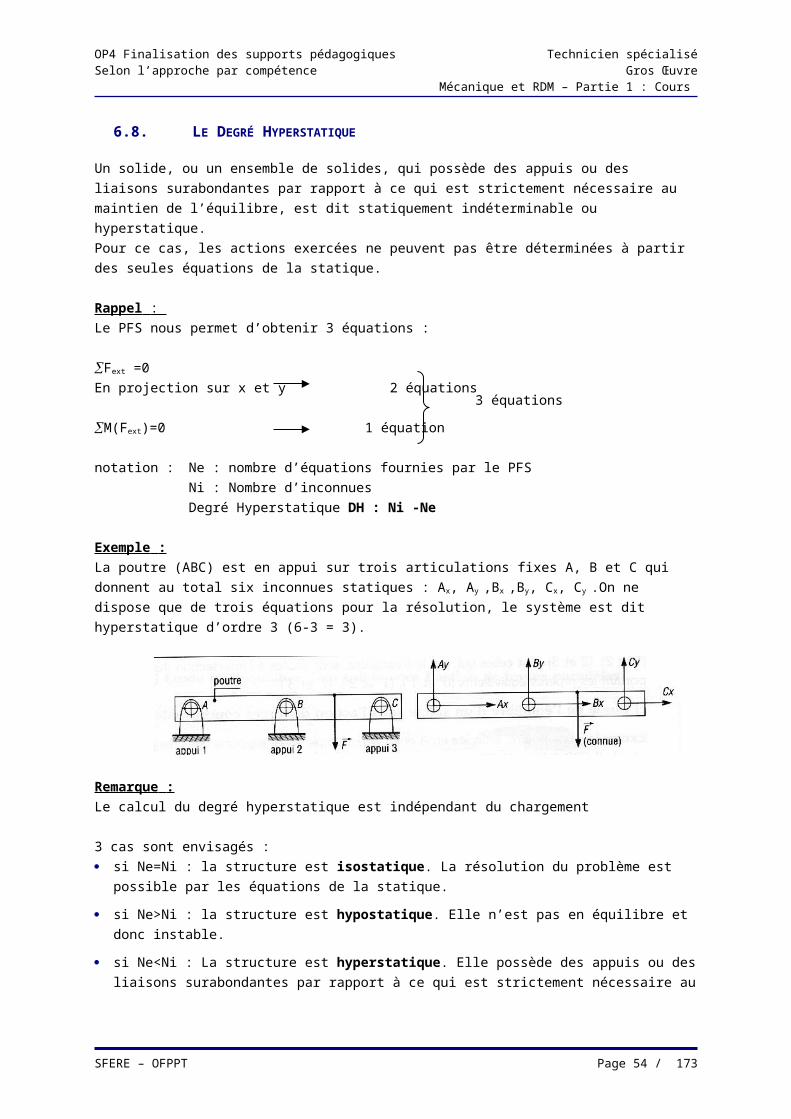
Exemple :
La poutre (ABC) est en appui sur trois articulations fixes A, B et C qui donnent au total six inconnues
statiques : Ax, Ay ,Bx ,By, Cx, Cy .On ne dispose que de trois équations pour la résolution, le système est
dit hyperstatique d’ordre 3 (6-3 = 3).
Remarque :
Le calcul du degré hyperstatique est indépendant du chargement
3 cas sont envisagés :
si Ne=Ni : la structure est isostatique. La résolution du problème est possible par les équations de
la statique.
si Ne>Ni : la structure est hypostatique. Elle n’est pas en équilibre et donc instable.
si Ne<Ni : La structure est hyperstatique. Elle possède des appuis ou des liaisons surabondantes
par rapport à ce qui est strictement nécessaire au maintien de l’équilibre. Les équations de la
statique ne suffisent pas pour la résolution du problème.
SFERE – OFPPT Page 40 / 137
3 équations
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
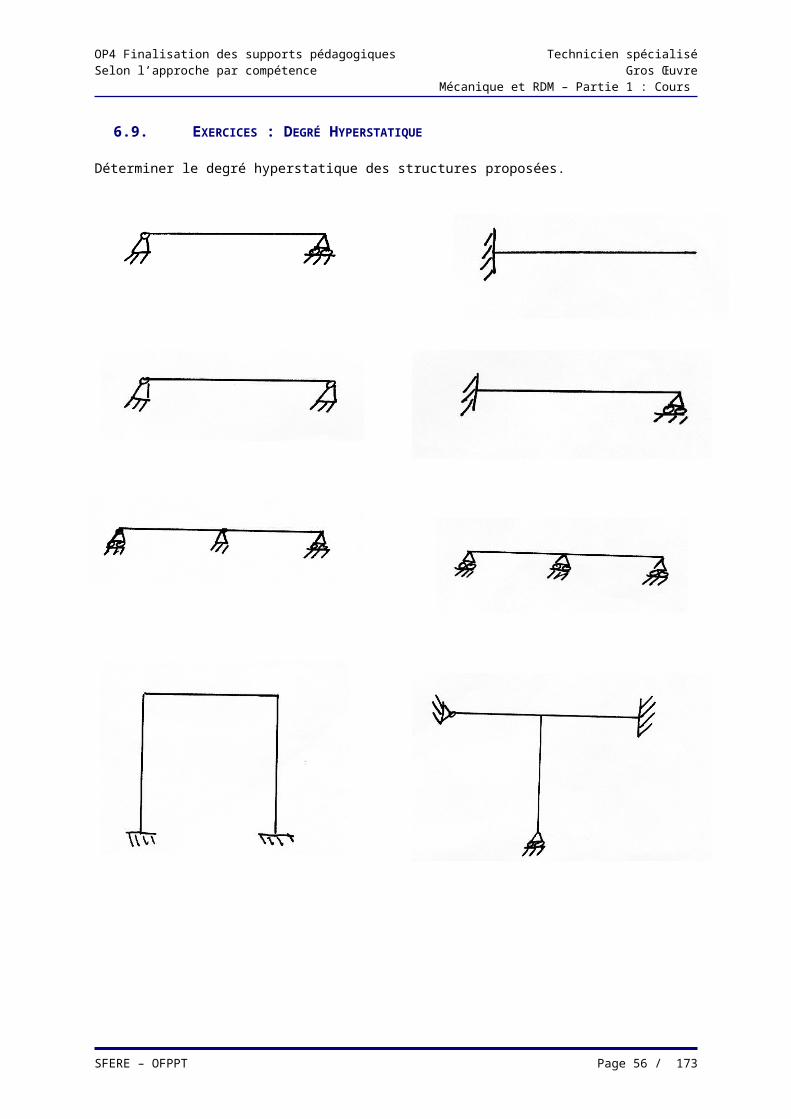
6.9. EXERCICES : DEGRÉ HYPERSTATIQUE
Déterminer le degré hyperstatique des structures proposées.
SFERE – OFPPT Page 41 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
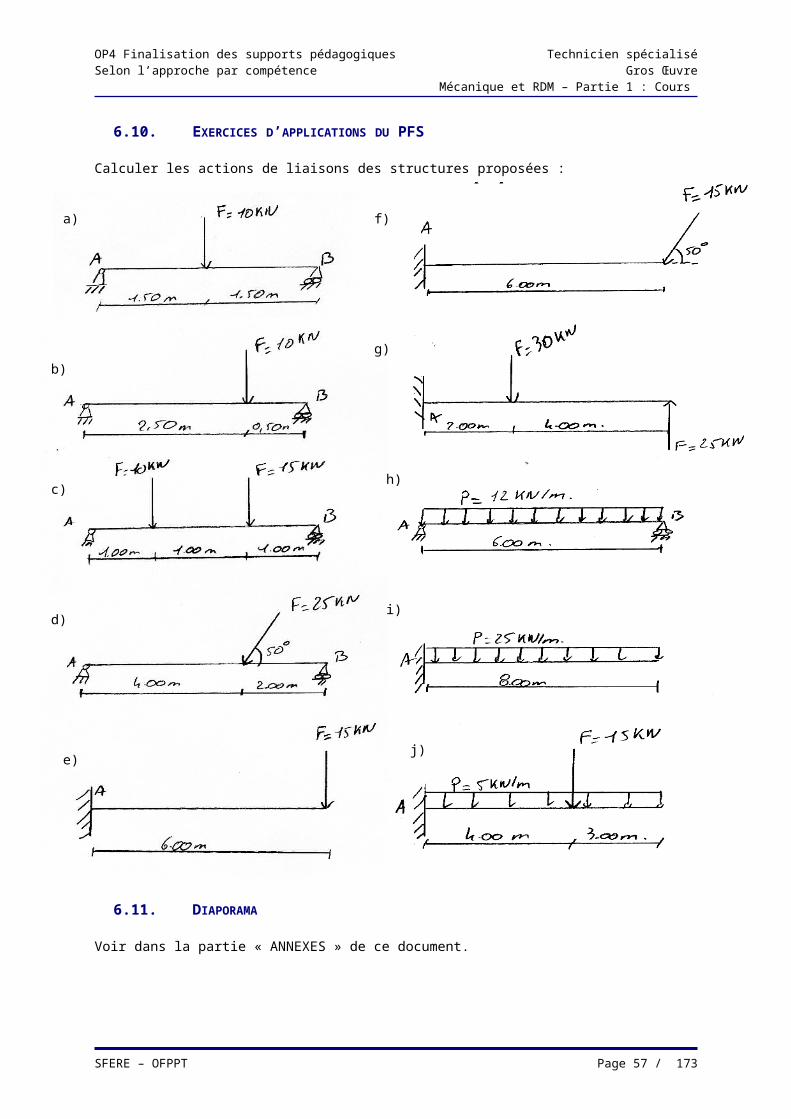
6.10. EXERCICES D’APPLICATIONS DU PFS
Calculer les actions de liaisons des structures proposées :
6.11. DIAPORAMA
Voir dans la partie « ANNEXES » de ce document.
SFERE – OFPPT Page 42 / 137
a)
b)
c)
d)
e)
f)
g)
h)
i)
j)
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
7. CENTRE DE GRAVITE
7.1. COURS ÉLÈVE
7.1.1. Définitions
Points matériels : points qui ont une masse donc un poids (P = m.g)
Poids : force d’attraction terrestre qui est constante et toujours orientée vers le bas suivant une
verticale
Centre de gravité : point particulier où l’on peut concentrer la masse (ou poids) de tous les points
matériels constituant le système de façon que le système reste équivalent statiquement parlant.
Détermination de la position de la résultante
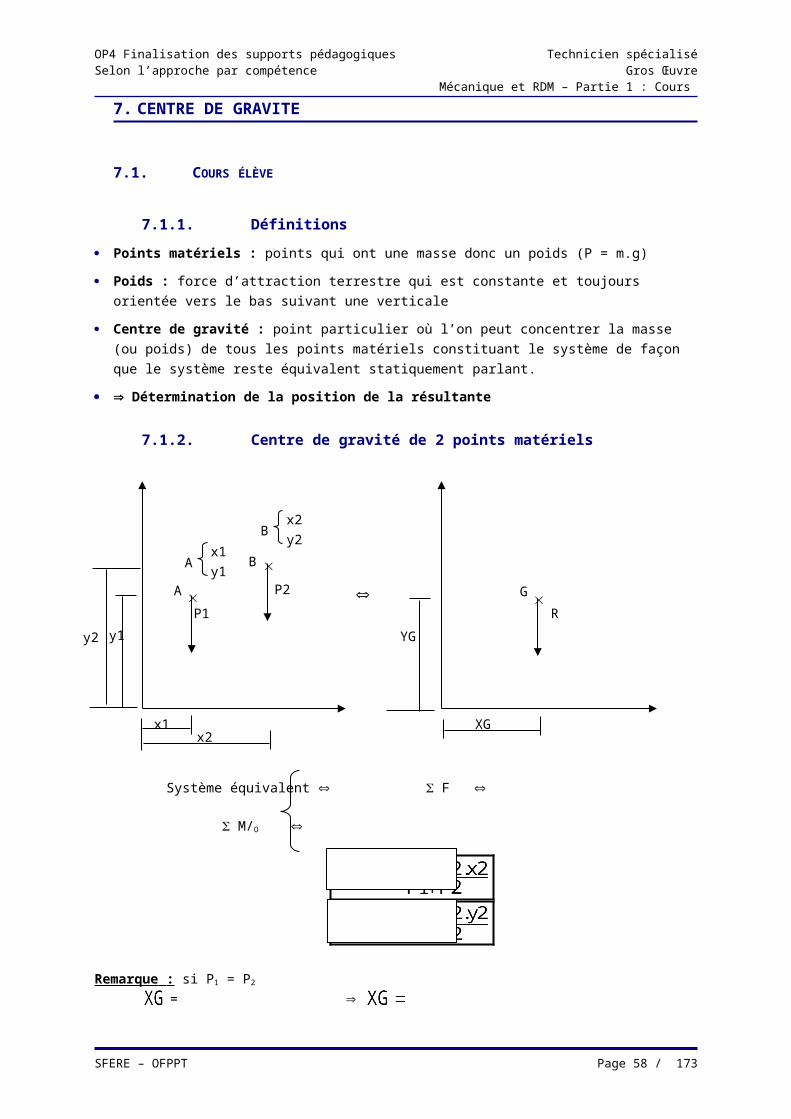
7.1.2. Centre de gravité de 2 points matériels
Système équivalent F
M/O
Remarque : si P1 = P2
=
SFERE – OFPPT Page 43 / 137
x2
R
Ax1
y1
A
x1
y2
P2
Bx2
y2
B
y1 YG
G
XG
P1
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
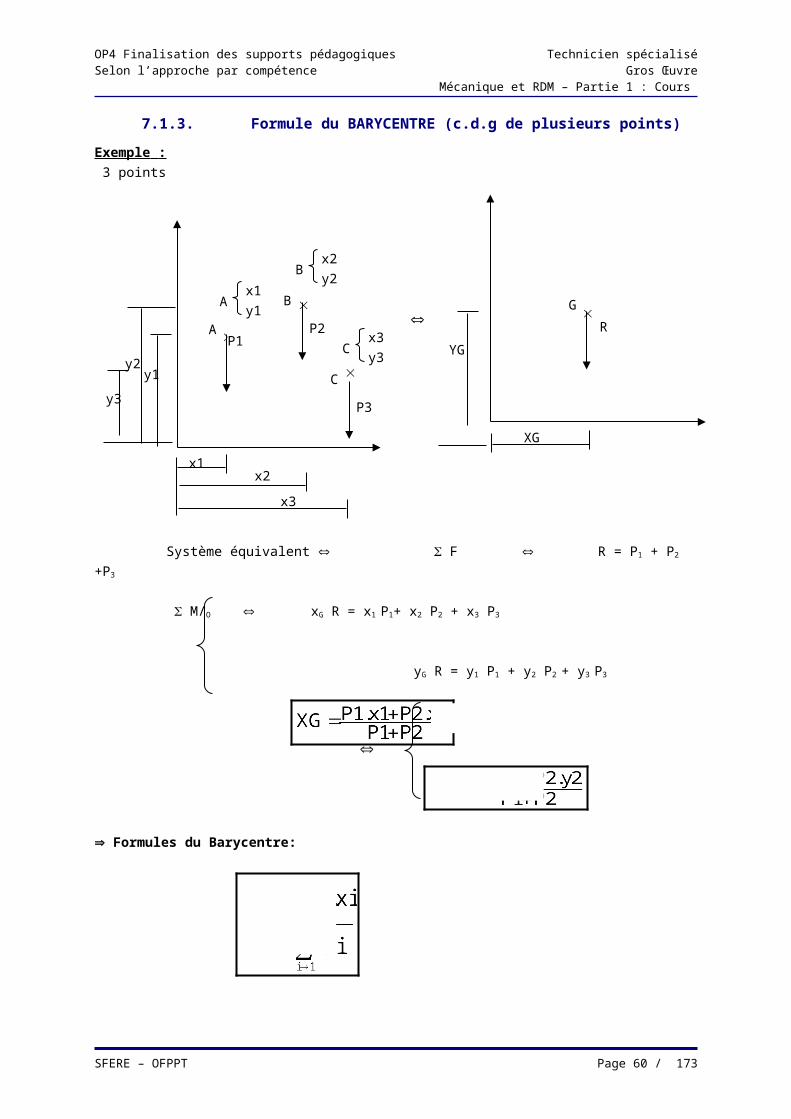
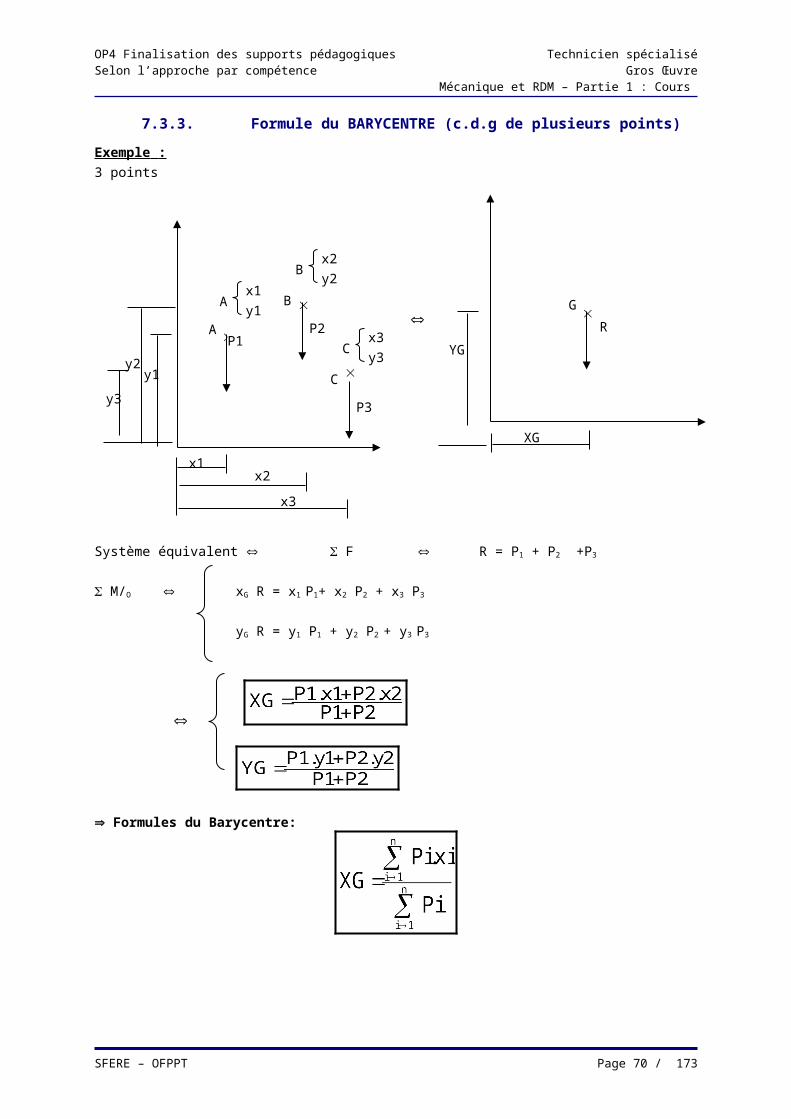
7.1.3. Formule du BARYCENTRE (c.d.g de plusieurs points)
Exemple :
3 points
Système équivalent F R = P1 + P2 +P3
M/O xG R = x1 P1+ x2 P2 + x3 P3
yG R = y1 P1 + y2 P2 + y3 P3
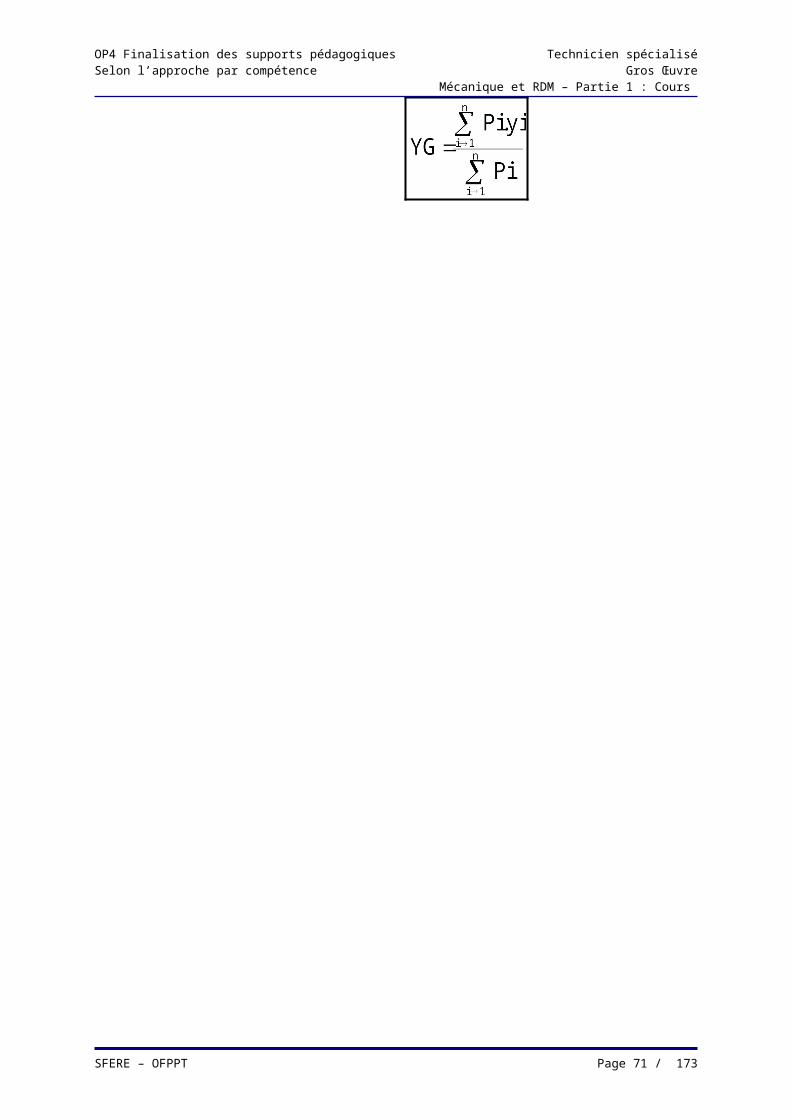
Formules du Barycentre:
SFERE – OFPPT Page 44 / 137
Ax1
y1
A
x1
y2
P2
Bx2
y2
B
y1
x3
P3
Cx3
y3
C
P1
x2
R
YG
G
XG
y3

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
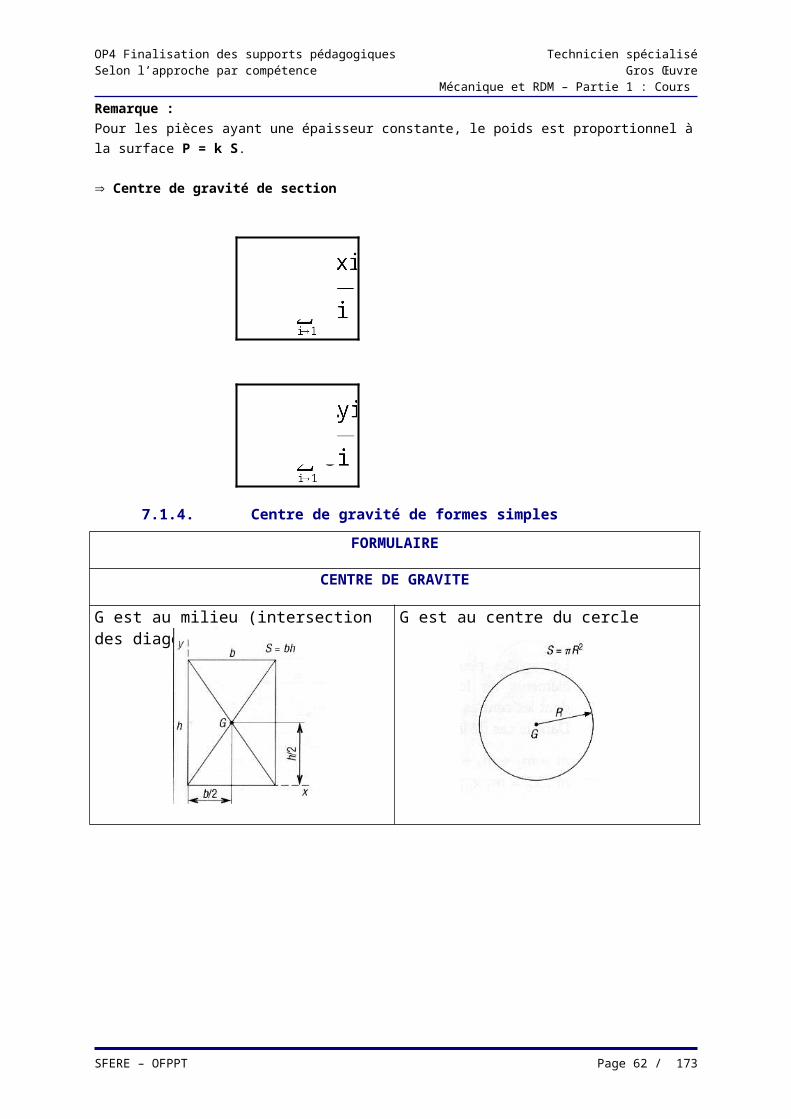
Remarque :
Pour les pièces ayant une épaisseur constante, le poids est proportionnel à la surface P = k S.
Centre de gravité de section
7.1.4. Centre de gravité de formes simples
FORMULAIRE
CENTRE DE GRAVITE
G est au milieu (intersection des diagonales)
G est au centre du cercle
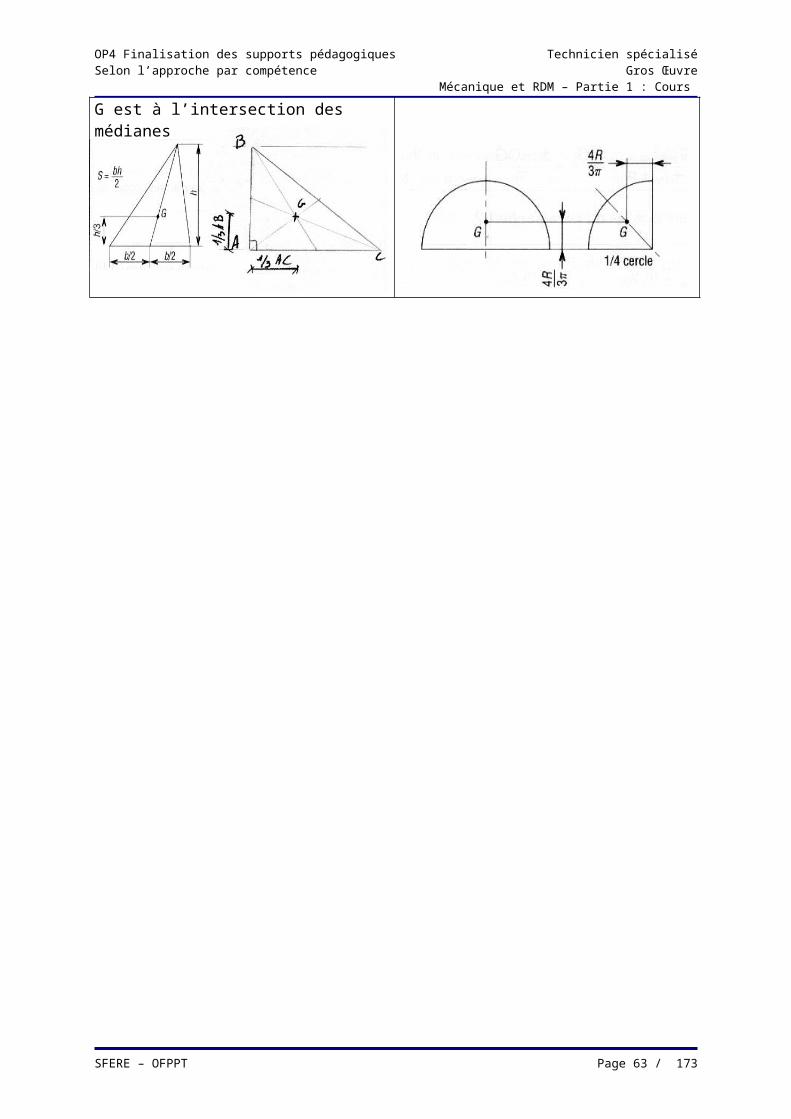
G est à l’intersection des médianes
SFERE – OFPPT Page 45 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
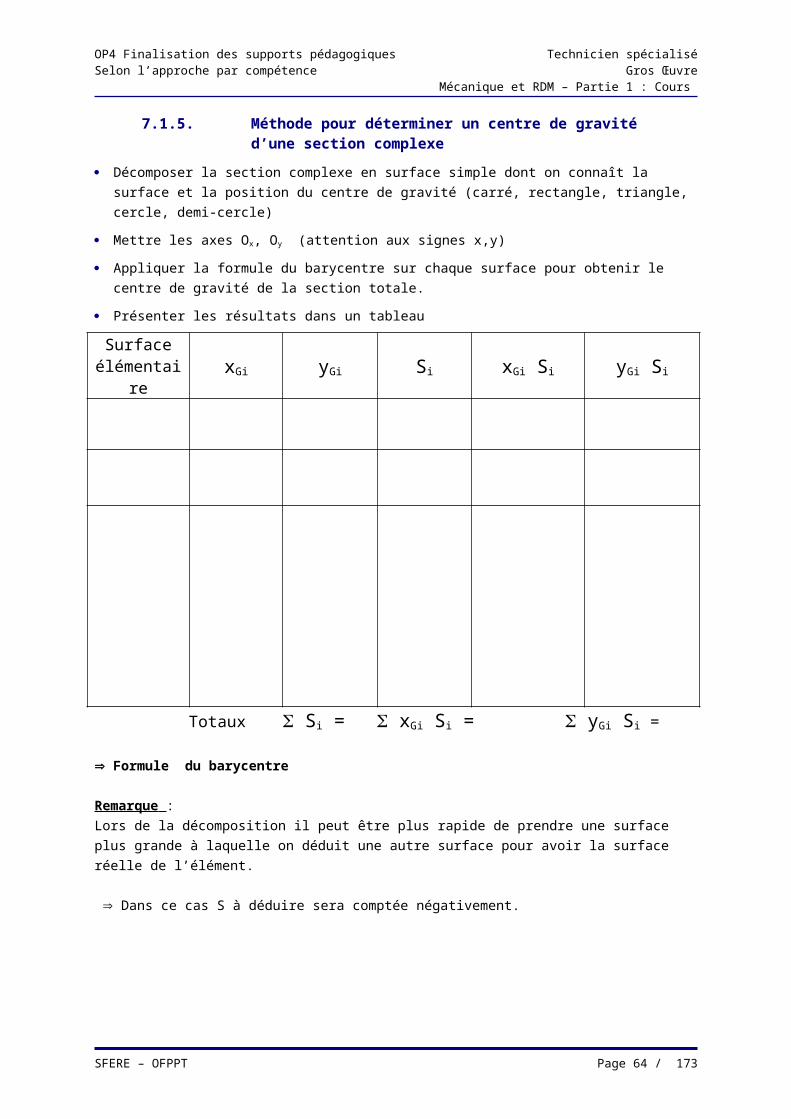
7.1.5. Méthode pour déterminer un centre de gravité d’une section complexe
Décomposer la section complexe en surface simple dont on connaît la surface et la position du
centre de gravité (carré, rectangle, triangle, cercle, demi-cercle)
Mettre les axes Ox, Oy (attention aux signes x,y)
Appliquer la formule du barycentre sur chaque surface pour obtenir le centre de gravité de la
section totale.
Présenter les résultats dans un tableau
Surface élémentaire
xGi yGi Si xGi Si yGi Si
Totaux Si = xGi Si = yGi Si =
Formule du barycentre
Remarque :
Lors de la décomposition il peut être plus rapide de prendre une surface plus grande à laquelle on
déduit une autre surface pour avoir la surface réelle de l’élément.
Dans ce cas S à déduire sera comptée négativement.
SFERE – OFPPT Page 46 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
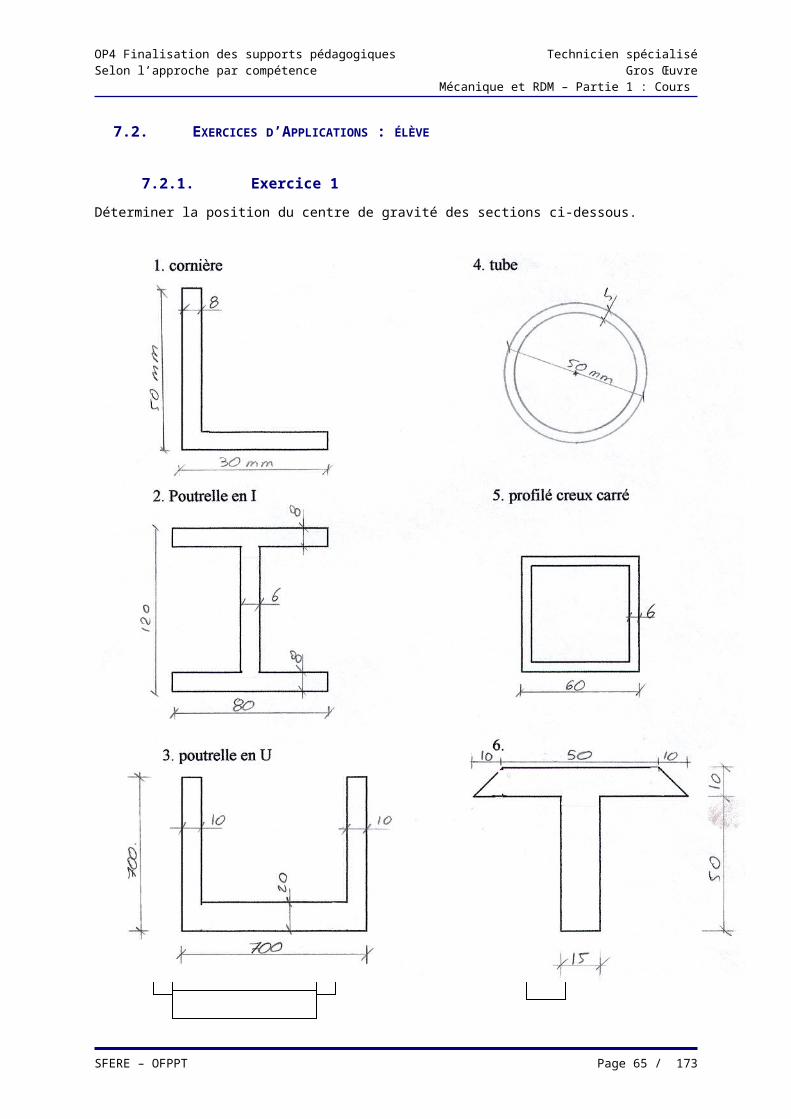
7.2. EXERCICES D’APPLICATIONS : ÉLÈVE
7.2.1. Exercice 1
Déterminer la position du centre de gravité des sections ci-dessous.
SFERE – OFPPT Page 47 / 137
2. Poutrelle en I
3. poutrelle en U
5. profilé creux
6.
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
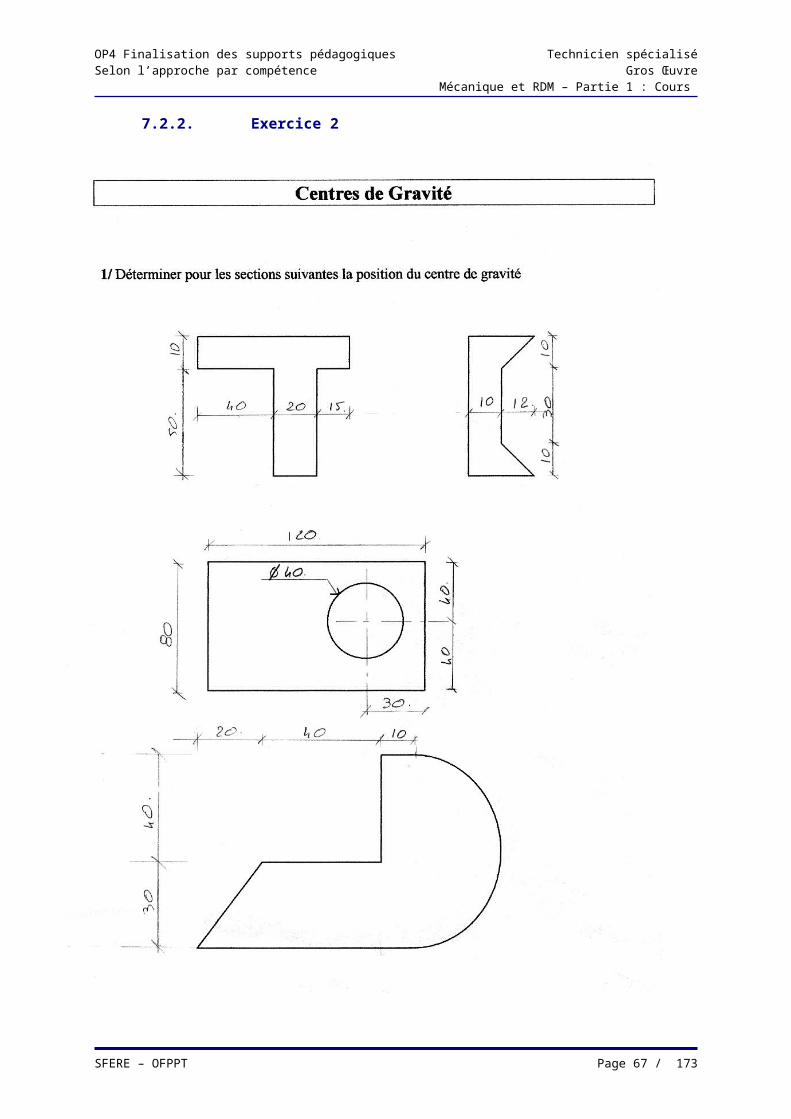
7.2.2. Exercice 2
SFERE – OFPPT Page 48 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
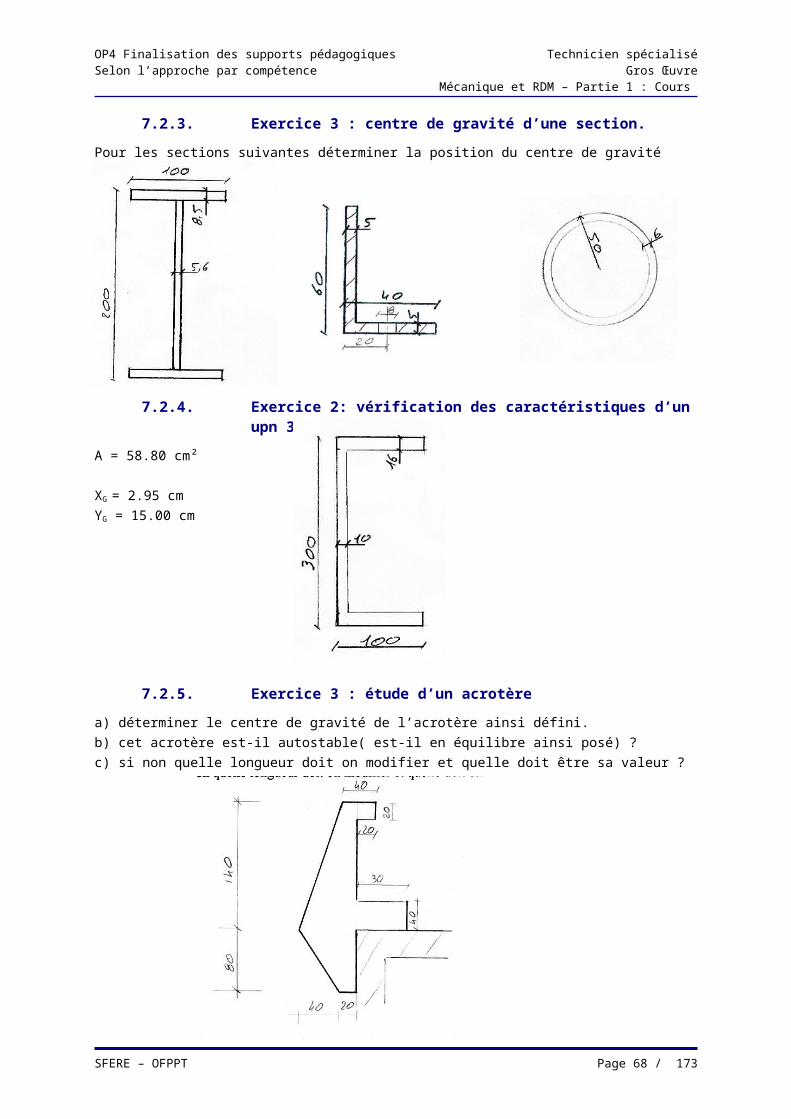
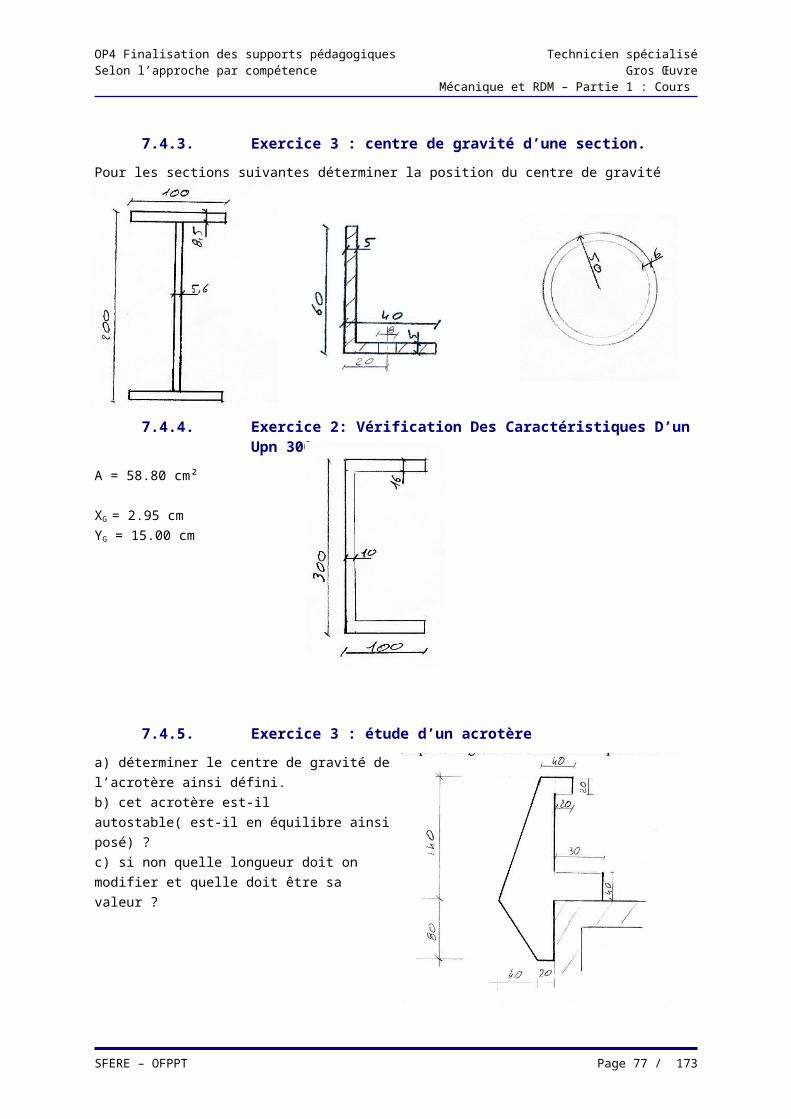
7.2.3. Exercice 3 : centre de gravité d’une section.
Pour les sections suivantes déterminer la position du centre de gravité
7.2.4. Exercice 2: vérification des caractéristiques d’un upn 300
A = 58.80 cm²
XG = 2.95 cm
YG = 15.00 cm
7.2.5. Exercice 3 : étude d’un acrotère
a) déterminer le centre de gravité de l’acrotère ainsi défini.
b) cet acrotère est-il autostable( est-il en équilibre ainsi posé) ?
c) si non quelle longueur doit on modifier et quelle doit être sa valeur ?
SFERE – OFPPT Page 49 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
7.3. COURS PROF
7.3.1. Définitions
Points matériels : points qui ont une masse donc un poids (P = m.g)
Poids : force d’attraction terrestre qui est constante et toujours orientée vers le bas suivant une
verticale
Centre de gravité : point particulier où l’on peut concentrer la masse (ou poids) de tous les points
matériels constituant le système de façon que le système reste équivalent statiquement parlant.
Détermination de la position de la résultante
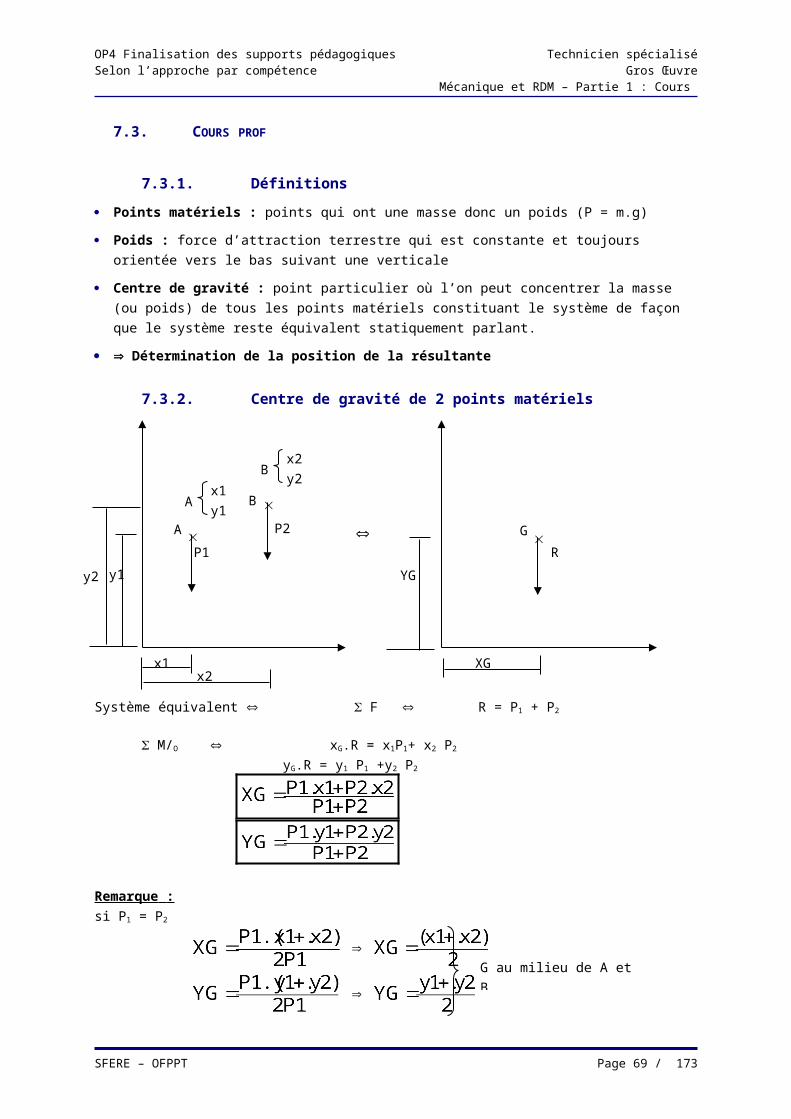
7.3.2. Centre de gravité de 2 points matériels
Système équivalent F R = P1 + P2
M/O xG.R = x1P1+ x2 P2
yG.R = y1 P1 +y2 P2
Remarque :
si P1 = P2
SFERE – OFPPT Page 50 / 137
G au milieu de A et B
x2
R
Ax1
y1
A
x1
y2
P2
Bx2
y2
B
y1 YG
G
XG
P1

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
7.3.3. Formule du BARYCENTRE (c.d.g de plusieurs points)
Exemple :
3 points
Système équivalent F R = P1 + P2 +P3
M/O xG R = x1 P1+ x2 P2 + x3 P3
yG R = y1 P1 + y2 P2 + y3 P3
Formules du Barycentre:
SFERE – OFPPT Page 51 / 137
Ax1
y1
A
x1
y2
P2
Bx2
y2
B
y1
x3
P3
Cx3
y3
C
P1
x2
R
YG
G
XG
y3
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Remarque :
Pour les pièces ayant une épaisseur constante, le poids est proportionnel à la surface P = k S.
Centre de gravité de section
7.3.4. Centre de gravité de formes simples
FORMULAIRE
CENTRE DE GRAVITE
G est au milieu (intersection des diagonales)
G est au centre du cercle
G est à l’intersection des médianes
SFERE – OFPPT Page 52 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
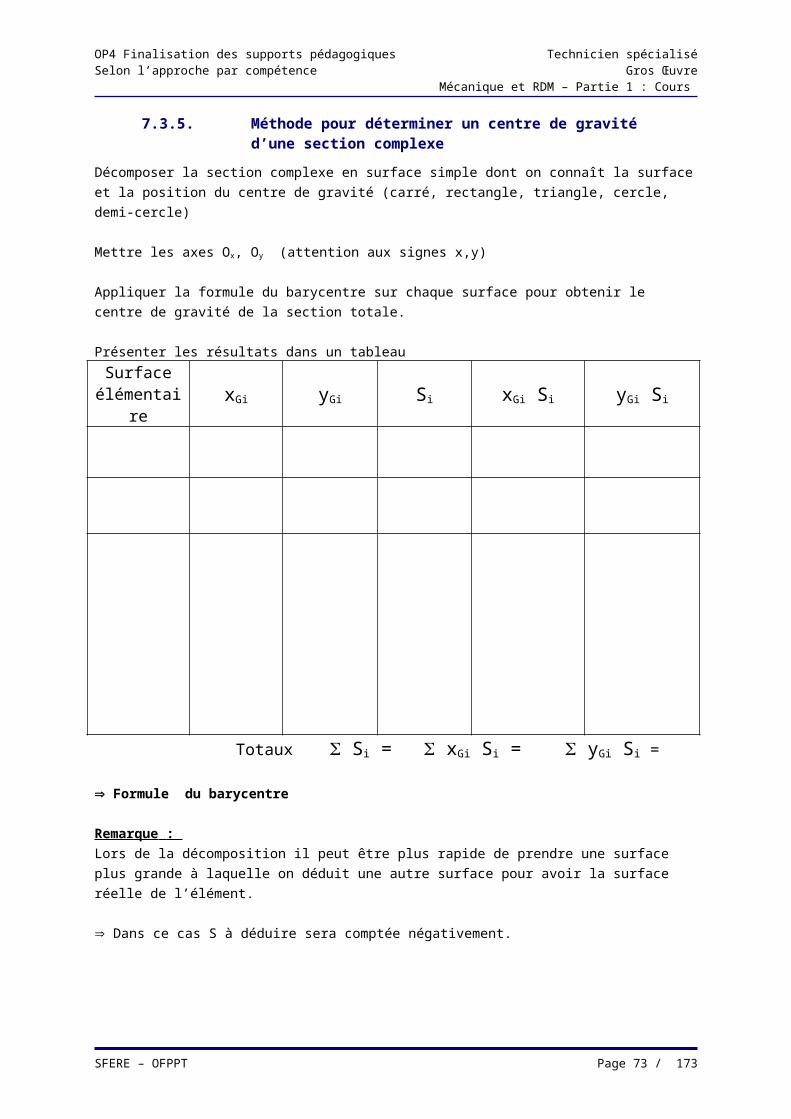
7.3.5. Méthode pour déterminer un centre de gravité d’une section complexe
Décomposer la section complexe en surface simple dont on connaît la surface et la position du centre
de gravité (carré, rectangle, triangle, cercle, demi-cercle)
Mettre les axes Ox, Oy (attention aux signes x,y)
Appliquer la formule du barycentre sur chaque surface pour obtenir le centre de gravité de la section
totale.
Présenter les résultats dans un tableau
Surface élémentaire
xGi yGi Si xGi Si yGi Si
Totaux Si = xGi Si = yGi Si =
Formule du barycentre
Remarque :
Lors de la décomposition il peut être plus rapide de prendre une surface plus grande à laquelle on
déduit une autre surface pour avoir la surface réelle de l’élément.
Dans ce cas S à déduire sera comptée négativement.
SFERE – OFPPT Page 53 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
7.4. EXERCICES D’APPLICATIONS : PROF
7.4.1. Exercice 1
Déterminer la position du centre de gravité des sections ci-dessous.
SFERE – OFPPT Page 54 / 137
1. cornière
2. Poutrelle en I
3. poutrelle en U
4. tube
5. profilé creux
6.

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
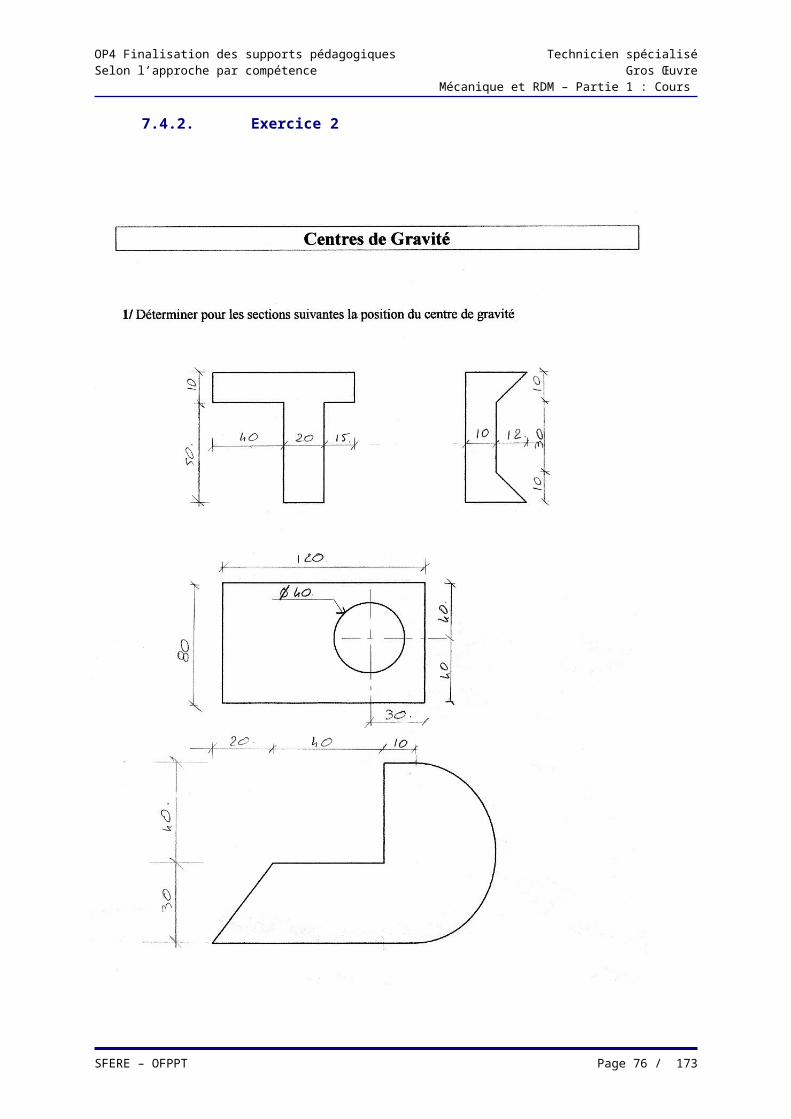
7.4.2. Exercice 2
SFERE – OFPPT Page 55 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
7.4.3. Exercice 3 : centre de gravité d’une section.
Pour les sections suivantes déterminer la position du centre de gravité
7.4.4. Exercice 2: Vérification Des Caractéristiques D’un Upn 300
A = 58.80 cm²
XG = 2.95 cm
YG = 15.00 cm
7.4.5. Exercice 3 : étude d’un acrotère
a) déterminer le centre de gravité de l’acrotère
ainsi défini.
b) cet acrotère est-il autostable( est-il en équilibre
ainsi posé) ?
c) si non quelle longueur doit on modifier et quelle
doit être sa valeur ?
SFERE – OFPPT Page 56 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
8. EQUILIBRE D’UN SYSTEME RETICULE
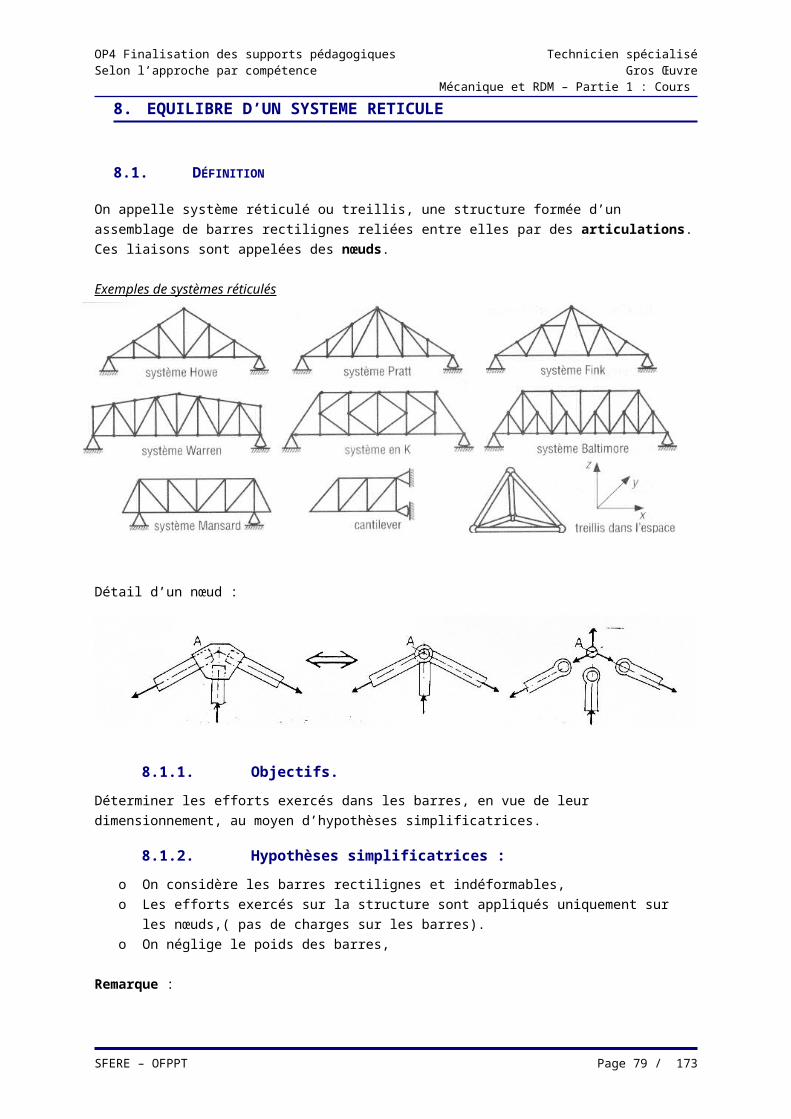
8.1. DÉFINITION
On appelle système réticulé ou treillis, une structure formée d’un assemblage de barres rectilignes
reliées entre elles par des articulations. Ces liaisons sont appelées des nœuds.
Exemples de systèmes réticulés
Détail d’un nœud :
8.1.1. Objectifs.
Déterminer les efforts exercés dans les barres, en vue de leur dimensionnement, au moyen
d’hypothèses simplificatrices.
8.1.2. Hypothèses simplificatrices :
o On considère les barres rectilignes et indéformables,
o Les efforts exercés sur la structure sont appliqués uniquement sur les nœuds,( pas de
charges sur les barres).
o On néglige le poids des barres,
Remarque :
Une barre articulée à ses deux extrémités est appelée biellette et n’est soumise qu’à de l’effort
normal.
SFERE – OFPPT Page 57 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Les barres sont par conséquent soumises à de la traction ou de la compression.
Barre en compression :
Barre en traction :
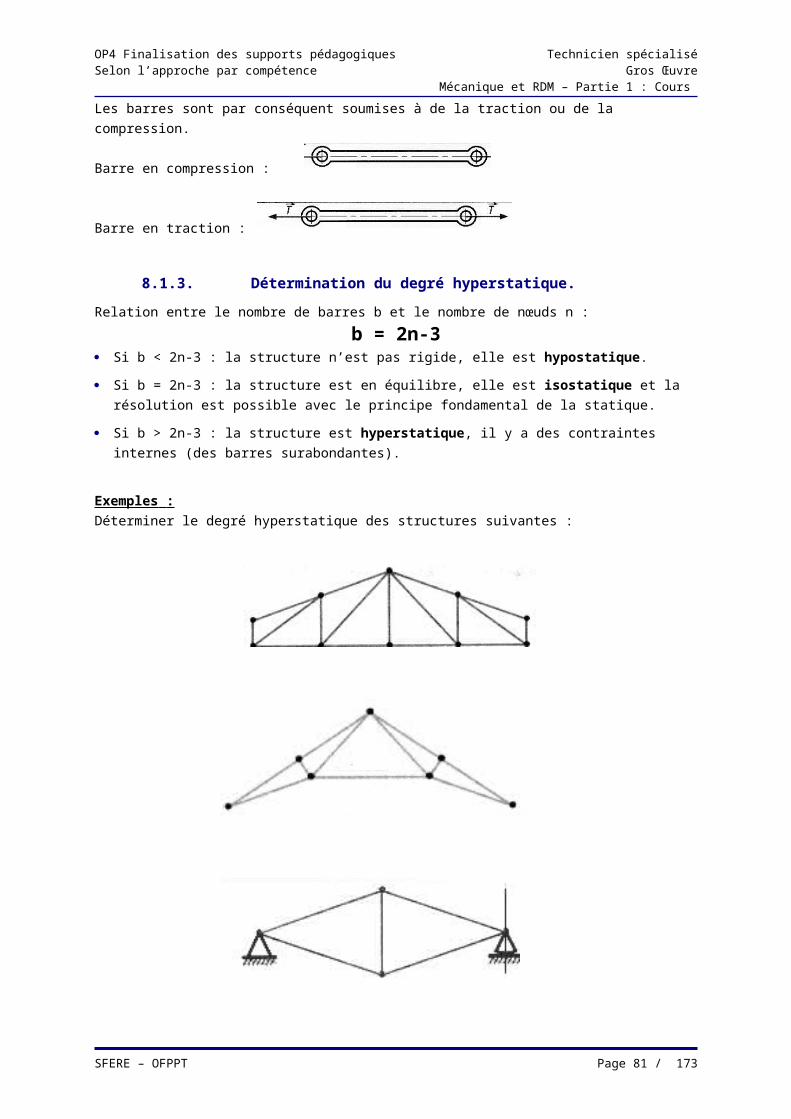
8.1.3. Détermination du degré hyperstatique.
Relation entre le nombre de barres b et le nombre de nœuds n :
b = 2n-3 Si b < 2n-3 : la structure n’est pas rigide, elle est hypostatique.
Si b = 2n-3 : la structure est en équilibre, elle est isostatique et la résolution est possible avec le
principe fondamental de la statique.
Si b > 2n-3 : la structure est hyperstatique, il y a des contraintes internes (des barres
surabondantes).
Exemples :
Déterminer le degré hyperstatique des structures suivantes :
SFERE – OFPPT Page 58 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
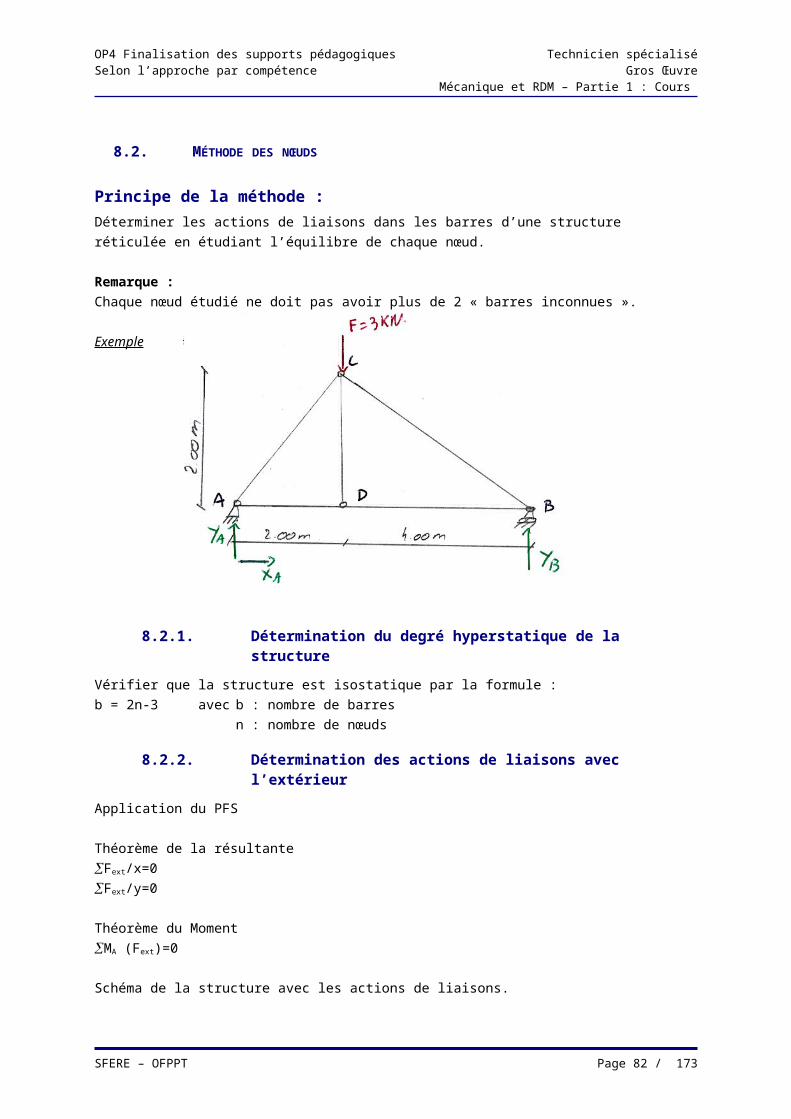
8.2. MÉTHODE DES NŒUDS
Principe de la méthode :
Déterminer les actions de liaisons dans les barres d’une structure réticulée en étudiant l’équilibre de
chaque nœud.
Remarque :
Chaque nœud étudié ne doit pas avoir plus de 2 « barres inconnues ».
Exemple
8.2.1. Détermination du degré hyperstatique de la structure
Vérifier que la structure est isostatique par la formule :
b = 2n-3 avec b : nombre de barres
n : nombre de nœuds
8.2.2. Détermination des actions de liaisons avec l’extérieur
Application du PFS
Théorème de la résultante
Fext/x=0
Fext/y=0
Théorème du Moment
MA (Fext)=0
Schéma de la structure avec les actions de liaisons.
SFERE – OFPPT Page 59 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
8.2.3. Equilibre des différents nœuds
Rappel : un solide soumis à deux forces est en équilibre si et seulement si ces 2 forces sont égales et
opposées.
- équilibre du nœud A
F/x=0 soit
F/Y=0 soit
- équilibre du nœud B
F/x=0 soit
F/Y=0 soit
- équilibre du nœud C
F/x=0 soit
F/Y=0 soit
- équilibre du nœud D
F/x=0 soit
F/Y=0 soit
8.2.4. Tableau récapitulatif :
Barres Effort Type d’effortADACCBCDDB
Remarque :
Si la barre pousse le nœud, elle est en compression
Si la barre tire le nœud, elle est en traction
8.3. MÉTHODE DE RITTER
Principe de la méthode :
1/Après avoir déterminer les actions de liaison entre le treillis et son support (réactions d’appuis)
2/ Pour déterminer les forces dans une ou plusieurs barres il suffit de la couper (pour faire apparaître
la force cherchée) .
3/ Continuer la coupure de façon à couper le treillis en deux
4/ Etudier l’équilibre d’un morceau pour déterminer les efforts dans les barres
Remarque :
Lors de la coupure du treillis il ne doit pas avoir plus de 3 « barres inconnues » coupées.
SFERE – OFPPT Page 60 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Exemple :
On veut déterminer la force dans la barre DB
1/ couper CB
2/ Continuer la coupure pour couper le treillis en 2
SFERE – OFPPT Page 61 / 137
FCB
FCB
FCB
FCB
FDB FDB
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
3/ Etudier l’équilibre d’un morceau.
ou
P.F.S
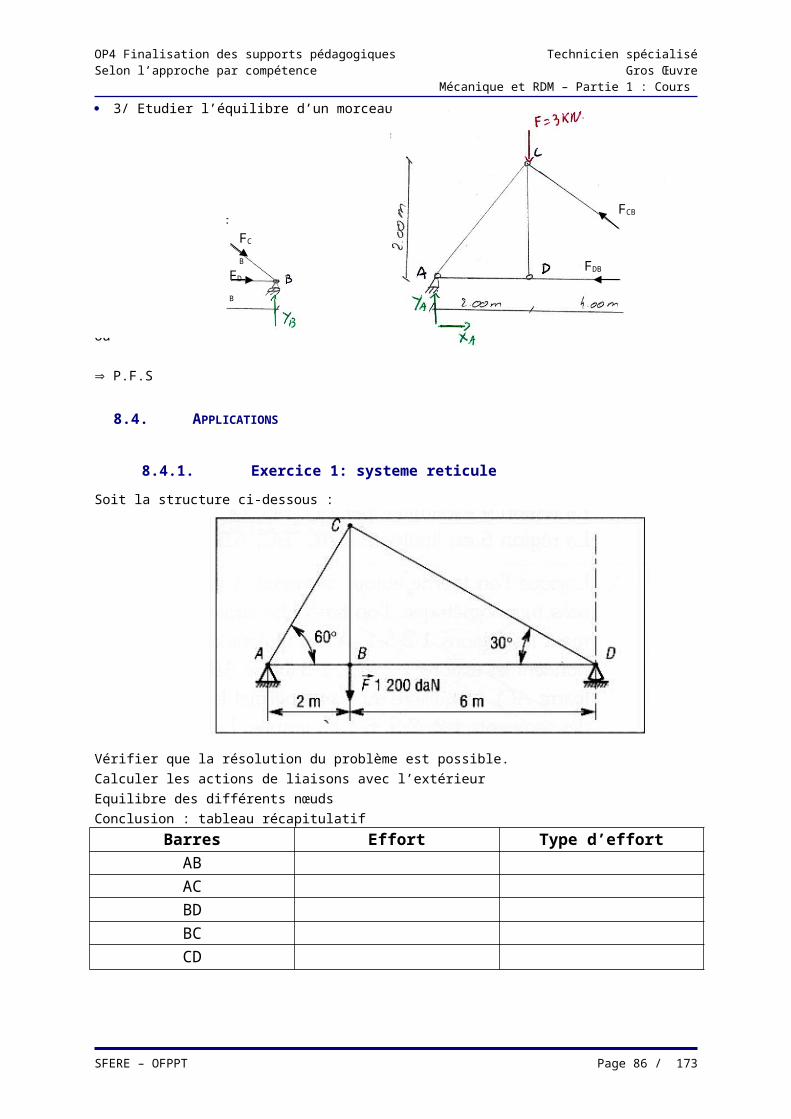
8.4. APPLICATIONS
8.4.1. Exercice 1: systeme reticule
Soit la structure ci-dessous :
Vérifier que la résolution du problème est possible.
Calculer les actions de liaisons avec l’extérieur
Equilibre des différents nœuds
Conclusion : tableau récapitulatif
Barres Effort Type d’effort
AB
AC
BD
BC
CD
SFERE – OFPPT Page 62 / 137
FCB
FCB
FDB FDB
FFC
B
FD
B
FD
B
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
8.4.2. Exercice 2 :
Un pont est réalisé à partir d’une plate-forme soutenue par deux structures identiques en treillis.
AE = EB = DC = 5m ;
AD=DE = EC = CB;
F (8000daN) appliquée en E schématise l’action exercée par la plate-forme chargée.
Déterminer le degré hyperstatique de la structure.
Déterminer les actions exercées sur les appuis en A et B.
Déterminer les actions dans toutes les barres de la structure.
Présenter les résultats dans un tableau récapitulatif.
8.4.3. Exercice 3 :
1. Déterminer le degré hyperstatique de la structure.
2. Déterminer les actions exercées sur les appuis en A et B.
3. Déterminer les actions dans toutes les barres de la structure.
4. Présenter les résultats dans un tableau récapitulatif.
SFERE – OFPPT Page 63 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
8.4.4. Exercice 2 : système réticule
Soit la structure ci-dessous :
Vérifier que la résolution du problème est possible.
Calculer les actions de liaisons avec l’extérieur
Equilibre des différents nœuds
Conclusion : tableau récapitulatif
Barres Effort Type d’effortACADAEBEBFCDDEDFEF
SFERE – OFPPT Page 64 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
9. RDM : GÉNÉRALITÉS
9.1. BUT DE LA RDM.
La résistance des matériaux se propose d'étudier la déformation et la limite de résistance d'un solide
(structure) soumis à un système de forces extérieures.
Concrètement :
Contrainte :
Flèche :
9.2. HYPOTHÈSES DE LA RDM.
1) Les matériaux sont : homogènes (texture du matériau continue et identique)
isotropes (mêmes propriétés mécaniques dans toutes les
directions)
2) Les solides étudiés sont en forme de poutre.
Solide engendré par une aire plane (s) dont le centre de gravité décrit une droite ou une faible courbe
G0G1, le plan de (S) restant normal à cette courbe.
* On étudie essentiellement les poutres droites possédant un plan de symétrie.
3) Navier Bernouilli :
Les sections planes perpendiculaires à la ligne moyenne restent planes après déformation et
perpendiculaires.
4) Loi de Hooke : les déformations sont faibles, progressives et réversibles
Domaine élastique
Relation linéaire entre contraintes et déformations
5) Principe de St Venant : les effets sont indépendants du mode de liaison, mais uniquement
fonction des sollicitations en se plaçant suffisamment loin de ces liaisons.
9.3. NOTION DE CONTRAINTE.
* Soit un solide en équilibre sous l'action de forces extérieures :
SFERE – OFPPT Page 65 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
* Coupons le solide suivant une section (S).
SFERE – OFPPT Page 66 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
* Isolons le tronçon (1) située à gauche et établissons son schéma mécanique :
Bilan des forces appliquées
Forces extérieures (F1, F2, F3)
Actions de contact de (2) (1) en tous points de S
* Sur chaque élément de surface (s) sur S agit une force
F (de direction quelconque en générale)
Composantes d'une contrainte.
F : à 2 composantes Composante normale perpendiculaire à (S) : Fn
Composante tangentielle dans le plan (S) : Ft
L'ensemble des forces F est:
a) des forces intérieures lorsque l'on étudie le solide en entier
b) des forces extérieures lorsque l'on étudie un tronçon de solide.
Définitions
On appelle contrainte normale : = (traction, compression)
On appelle contrainte tangentielle : = (cisaillement)
Unités en Pascal et MégaPascal MPa
SFERE – OFPPT Page 67 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
9.4. RÉPARTITION UNIFORME DES CONTRAINTES (SUR UNE SECTION)
Soit une section fictive soumise à des contraintes et
Hypothèse : Répartition uniforme des contraintes sur S (traction ou compression).
Problème : Résultante des forces normales fn sur S (Intensité ; position).
9.4.1. Intensité de F (résultante des fn)
Sur chaque élément de surface s agit une force normale fn.
or fn1 = x s1 ; fn2 = x s2
et fn // oz F // oz
F = ( s1 + s2 + .............) = S
F = S
SFERE – OFPPT Page 68 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
9.4.2. Point d'application de F
Méthode : Système équivalent ( Mt identique)
Mt/ox(F) = Mt/ox(fn)
F . yG = fn1 . y1 + fn2 . y2 .
.S.yG = .si.yi
Si Mt/oy(F)
Concrètement :
SFERE – OFPPT Page 69 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.TRACTION SIMPLE ET COMPRESSION SIMPLE
10.1. DÉFINITIONS.
Un solide est sollicité :
En traction simple lorsqu'il est soumis à deux forces
directement opposées situées sur la ligne moyenne et qui
tendent à l'allonger.
En compression simple lorsqu'il est soumis à deux forces
directement opposées situées sur la ligne moyenne et qui
tendent à le raccourcir
10.2. ESSAI DE TRACTION
On soumet une éprouvette cylindrique de dimensions normalisées à un essai de traction. On
enregistre les déformations en fonction de la force N ( N augmentant progressivement jusqu’à obtenir
la rupture de l’éprouvette).
10.2.1. Etude du graphe :
N : effort de traction
L : allongement de l'éprouvette.
L : longueur de l'éprouvette.
10.2.2. Etude de la Zone élastique OA.
Les allongements sont proportionnels aux efforts de traction.
N = k L
Limite élastique : feNe
S avec S section de l'éprouvette.
Les fournisseurs d'acier garantissent cette valeur ; exemple : FeE 500 fe = 500 MPa
L’allongement de l’éprouvette L est proportionnel à sa longueur initiale Lo
L : allongement de l’éprouvette
Lo : longueur initiale
définit un allongement relatif L
Lo
SFERE – OFPPT Page 70 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Contraintes.
Pour faire apparaître les contraintes dans l’éprouvette il faut couper celle-ci (à une abscisse x)
Par application du principe de Bernouilli ( x et donc constant pour toutes les fibres)
et de la Loi de Hooke = k L ou = k : identique pour toutes les fibres est uniformément répartie sur la section S
SFERE – OFPPT Page 71 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.2.3. Diagramme contrainte - déformation:
Puisque L
Lo et
N
S : on peut
tracer le diagramme de l’essai en
fonction de et (diagramme
homothétique au précédent)
Loi de Hooke .
On peut remarquer que dans la zone élastique les contraintes sont bien proportionnelles aux
déformations :
tan
= .tan si on pose E = tan = .E
E : module de Young ou module d'élasticité longitudinal E : est une constante pour un matériau donné ; par exemple : E = 2 MPa pour l'acier
SFERE – OFPPT Page 72 / 137
x
x
y
O
(S)
N= N
S
A
O
BC
E l a s t i q u e P l a s t i q u e
f e
f r
A c i e r d o u x
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.2.4. Zone plastique AC.
Lorsque l'on atteint cette zone on constate un allongement appréciable de l’éprouvette sans que
l’effort augmente beaucoup.
En déchargeant l'éprouvette on constate qu'il reste un allongement permanent de l'éprouvette e
(déformation rémanente).
Résistance à la rupture Rr :
SFERE – OFPPT Page 73 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.2.5. Calculs pratiques :
Compte tenu des hypothès de la RDM ( Bernoulli ) la contrainte dans les matériaux devra toujours être
inférieure à contrainte admissible fixée réglementairement, notée (contrainte normale admissible)
Exemple :
= fe = 240 MPa ( pour un un acier FeE 240 suivant le CM 66)
= fsu = 500/1.15 (pour un acier FeE 500 suivant le BAEL 93 à l’ELU)
= = 0.6 fc28 (pour le béton comprimée, suivant le BAEL 93 à l’ELS)
A Vérification d’une section
Données :
N : Effort de traction ou de compression, en N.
S : Aire de la section sollicitée, en m².
: Contrainte admissible du matériaux.
On doit vérifier que la contrainte normale N
S
B Détermination d’une section
Données :
N : Effort de traction ou de compression, en N.
: Contrainte admissible du matériaux.
On veut déterminer la section nécessaire et suffisante de façon à ce l’élément « résiste » :
Donc faire en sorte que : S
C Calcul d’allongement ou de raccourcissement:
Données :
N : Effort de traction ou de compression, en N.
S : Aire de la section sollicitée, en m².
Lo: Longueur initiale de l’élément.
E : Module d'élasticité longitudinal
= .E
L
Lo
D Remarque :
Les formules précédentes sont valables pour les pièces tendues et les pièces comprimées, dites
courtes ( pour les pièces comprimées « longues », le calcul sera mené au flambement).
SFERE – OFPPT Page 74 / 137
1/
2/
3/ L =.Lo
Ou L

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.2.6. Exercice:
Soit un tirant métallique de longueur Lo = 5m en acier FeE 240 soumis à un effort de traction de 200
KN.
E = 2.1 105 MPa
a/ Déterminer les dimensions néssaires et suffisantes de sa section :
Cas d’une section carrée (arrondir au mm supérieur)
Cas d’une section circulaire (arrondir au mm supérieur)
b/ Déterminer les dimensions néssaires et suffisantes de sa section de façon à limiter son
allongement à 5mm:
Cas d’une section carrée (arrondir au mm supérieur)
Cas d’une section circulaire (arrondir au mm supérieur)
10.3. APPLICATIONS : TRACTION SIMPLE
10.3.1. EXO 1:
DONNEES :
Pc = 1200 N
E = 2.1 105 MPa
QUESTIONS
1/ Déterminer les efforts dans EB
2/ En déduire l'allongement de EB, si son diamètre est de 6 mm
SFERE – OFPPT Page 75 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 76 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.3.2. EXO 2
DONNEES :
Pc = 1000 N
= 160 MPa
E = 2.1 105 MPa
QUESTIONS
1/ Déterminer le diamètre de BC (arrondir au diamètre paire supérieur.
2/ En déduire son allongement.
10.3.3. EXO 3
DONNEES :
P = 50 N
= 160 MPa
E = 2.1 105 MPa
SFERE – OFPPT Page 77 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
QUESTIONS
1/ Déterminer le diamètre de BC et de AB (arrondir au mm supérieur).
2/ En déduire leur allongement.
SFERE – OFPPT Page 78 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
10.4. COEFFICIENT DE POISSON : U
Il existe un rapport constant entre la déformation transversale r
r et l'allongement longitudinal .
r
r= - u (r quand L )
u = coefficient de poisson (caractéristique du matériau)
Problème : déterminer la variation relative de volume en fonction de la variation relative de longueur
V = .r² L
dV
V
dl
l ( )1 2
Valeur de u
Cas limite = 0.5 dV = 0 ( caoutchouc)
Cas général : compris entre 0.25 et 0.3.
SFERE – OFPPT Page 79 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
11.CISAILLEMENT SIMPLE
11.1. DÉFINITIONS.
Un solide est sollicité en cisaillement simple lorsqu'il est soumis à
deux forces directement opposées agissant de part et d’autre d’une
même section
Remarques :
- Une telle disposition étant très théorique, les cas de cisaillement simple sont très rares et
s’accompagne souvent de flexion et de compression.
- On admet toutefois qu’il y a cisaillement simple dans les cas suivant :
Découpage d’une tôle
Assemblage au moyen de
rivets ou de boulons de 2
pièces minces soumises à un
effort de traction simple
Assemblage par un axe créant une articulation
11.2. CONTRAINTE DE CISAILLEMENT ( EN CISAILLEMENT SIMPLE).
On admettra dans un but de simplification que les contraintes de cisaillement ( parallèles à la section
S) sont uniformément réparties sur la section cisaillée ( ce qui est faux en réalité, car cela dépend de
la forme de la section)
SFERE – OFPPT Page 80 / 137
T
T
S
o u t i ltô le
rivet
N N
T
S
: contrainte moyenne de cisaillement
T : effort tranchant
S : section cisaillée
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Contrainte limite de cisaillement pour de l’acier
Elle est fonction de fe de l’acier : 65
100fe
SFERE – OFPPT Page 81 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
11.3. EQUATION DE DÉFORMATION
Le cisaillement entraîne le décrochement de la section droite ab par glissement par rapport à sa
voisine a’b’
La déformation unitaire est ici une déformation angulaire i =dy
dx = tan
Or est petit tan = (en radian)
= G En appliquant la loi de Hooke dans cas on a :
G : Module d’élasticité transversal
: Déformation unitaire en radian
: Contrainte de cisaillement
Par l’élasticité on peut démontrer que
11.4. CALCUL PRATIQUE
A Vérification d’une section
Données :
N : Effort de traction ou de compression, en N.
S : Aire de la section cisaillée, en m².
: Contrainte admissible de cisaillement du matériau.
On doit vérifier que la contrainte de cisaillement
B Détermination d’une section
Données :
N : Effort de traction ou de compression, en N.
: Contrainte admissible de cisaillement du matériau.
On veut déterminer la section nécessaire et suffisante de façon à ce l’élément « résiste » :
Donc faire en sorte que : S
SFERE – OFPPT Page 82 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
11.5. EXERCICE D’APPLICATION
Soit l’assemblage définit ci-contre
L’effort de traction dans le tirant et de 400 kN
L’axe est cylindrique est en FeE 240.
Déterminer le diamètre minimal de l’axe.
11.6. EXERCICE FORMATIF
Ferme métallique
SFERE – OFPPT Page 83 / 137
Tirant
Axe

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.N, V, M
12.1. GÉNÉRALITÉS
12.1.1. Forme de poutre.
Voir définition dans le chapitre R D M.
12.1.2. Nature des charges.
A Charges ponctuelles (concentrées) :
Charges appliquées en un point.
B Charges uniformément réparties : (q/ml ou g, v etc. ).
Sur chaque segment de même longueur agit la même charge.
Ex : - Poutre de section constante soumise à son poids propre
- Poutre sous un plancher B.A.
Unité : q s’exprime en N/ml = le taux de charge.
Diagramme de charge rectangulaire.
C Charges réparties quelconques:
sur x f
Intensité locale de la charge
q(x) = (fonction de x).
SFERE – OFPPT Page 84 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
D Equivalence vectorielle des charges réparties :
Sur x : charge f = q(x) . x (= aire hachurée)
Charge totale = aire totale du diagramme des charges.
Position de la résultante = au Cdg du diagramme.
SFERE – OFPPT Page 85 / 137
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.1.3. Eléments de réduction des forces extérieures.
- Soit une poutre isostatique
- Si on coupe en S est qu’on isole le morceau de gauche (enlève le morceau de droite).
Il est nécessaire de rétablir l’équilibre de ce morceau en appliquant sur S les efforts suivants :
N : Effort suivant la ligne moyenne
V : Effort perpendiculaire à la ligne moyenne.
M : Moment autour de z.
N, V, M, remplacent les actions à droite de la coupure.
On peut dire aussi que les actions à gauche de la coupure + N, V, M = 0
Définition :
Remarque :
N, V, M, sont fonction de x (position de la coupure) Diagramme N(x), V(x) et M(x) le long de la
poutre.
Cas particuliers :
1/ N 0 V = 0 M = 0 (Traction, compression simple)
2/ N = 0V = 0 M 0 ( )
3/ N = 0V 0 M = 0 ( )
4/ N = 0V 0 M 0 ( )
5/ N 0 V 0 M 0 ( )
SFERE – OFPPT Page 86 / 137
N = - projections / ox des forces à gauche de S
Ou projections / ox des forces à droite de S.
V = - projections / oy des forces à gauche de S
Ou projections / oy des forces à droite de S.
M = - Moments / oz au cdg de S des forces à gauche de S.
Ou Moments / oz au cdg de S des forces à droite de S.
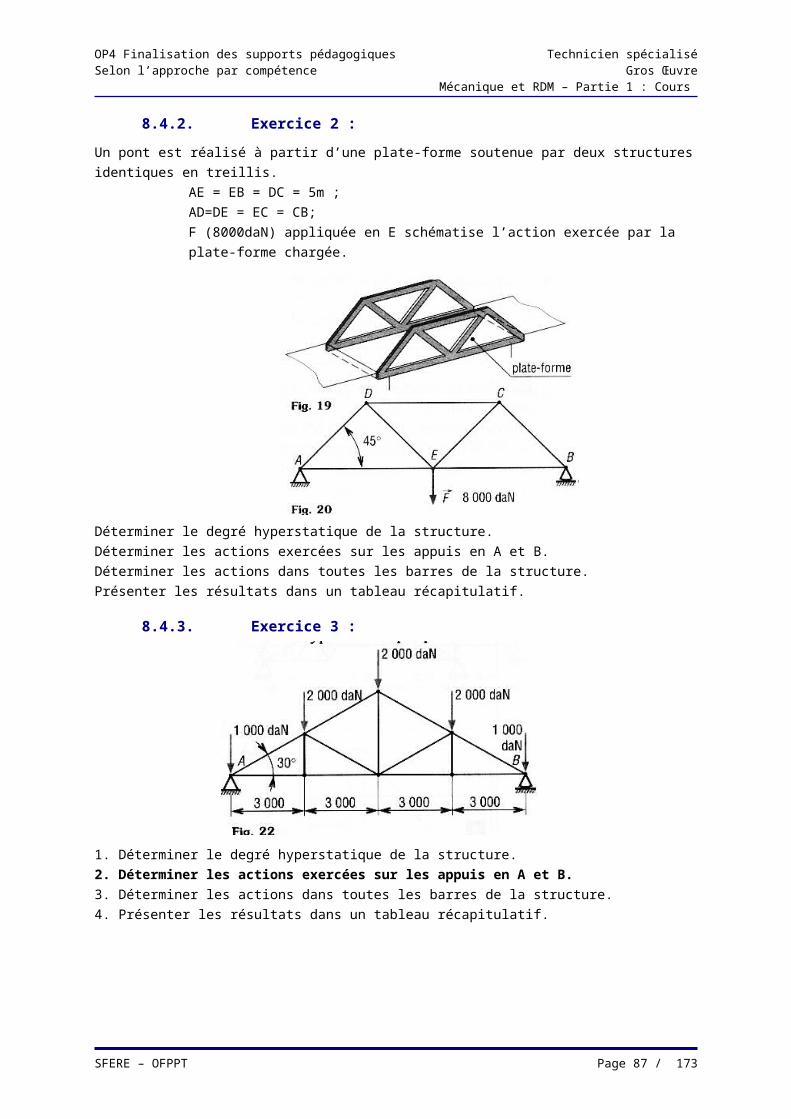
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.1.4. Relations entre V, M et q
* Soit un tronçon de poutre définie ci-dessous :
q(x)
-(M+dM)
-(V+dV)
V
M dx
Equilibre du tronçon :
proj/oy = 0
V - q(x).dx - V -dV = 0
dV = q(x).dx
q(x) =
Mt/oz = 0
M - V.dx + q(x) - M -dM = 0
- V.dx = dM
V = 0 extremum de M
+
12.1.5. Allure des diagrammes
Charge concentréeCharge uniformément
répartie
Charge triangulaire
p(x) = p.x
V(x)
M(x)
x0 x1
m0
m1
Remarque :
dM = -Vdx
SFERE – OFPPT Page 87 / 137
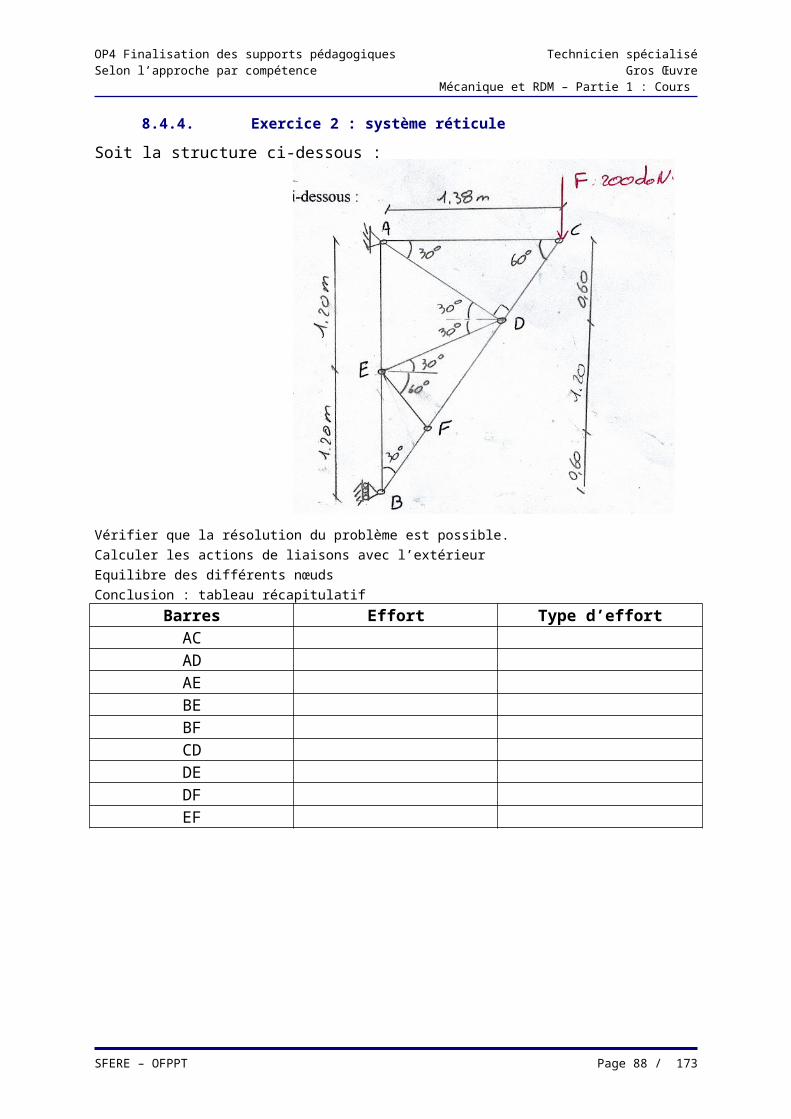
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 88 / 137
M0 = aire à droite de S de l’effort tranchant. + M1
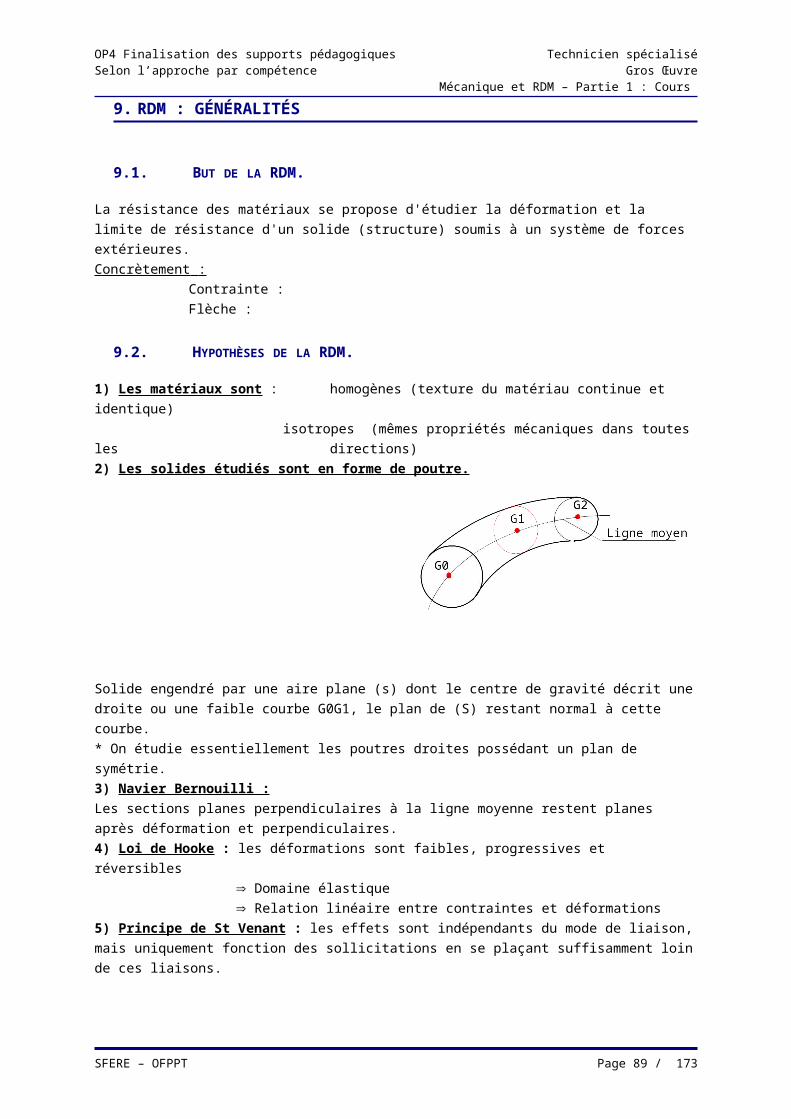
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.2. DIAGRAMME DE N(X), V(X), M(X) MÉTHODE DE DÉTERMINATION.
12.2.1. La statique est supposée terminée :
Schéma mécanique réel ( ne pas concentrer les charges réparties ).
Rb F
Ra Mc
L
b
a
Exemple :
12.2.2. Si N(x) 0 ( Flexion composée)
Dans un premier temps : Faire 2 schémas mécaniques
Un en ne prenant que les projections à la ligne moyenne de la poutre et les couples ( F(y), Mt)
Rb(y) F(y)
RaMc
Un en ne prenant que les projections // à la ligne moyenne (F(x).
SFERE – OFPPT Page 89 / 137
Rb(x)
F(x)
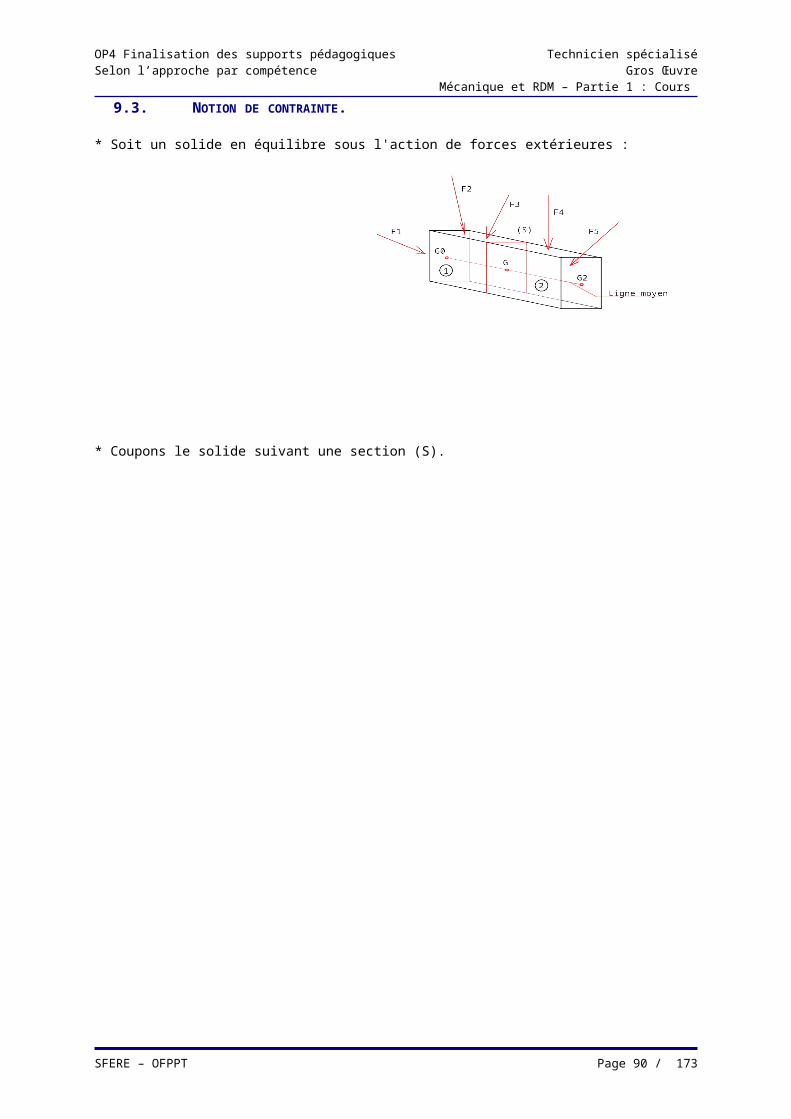
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.2.3. Définir les zones pour chaque schéma 1 et 2
Donne une équation et donc une allure différente dans chaque zone.
Remarque :
Changement de zone quand :
pour N(x) : - Changement de taux de charge en compression ou traction
- Rencontre une force normale à la poutre.
pour V(x) : - Changement de taux de charge à la ligne moyenne
- Rencontre une force à la poutre.
pour M(x) : - Changement de zone de V(x)
- Rencontre un moment appliquée à la poutre.
SFERE – OFPPT Page 90 / 137
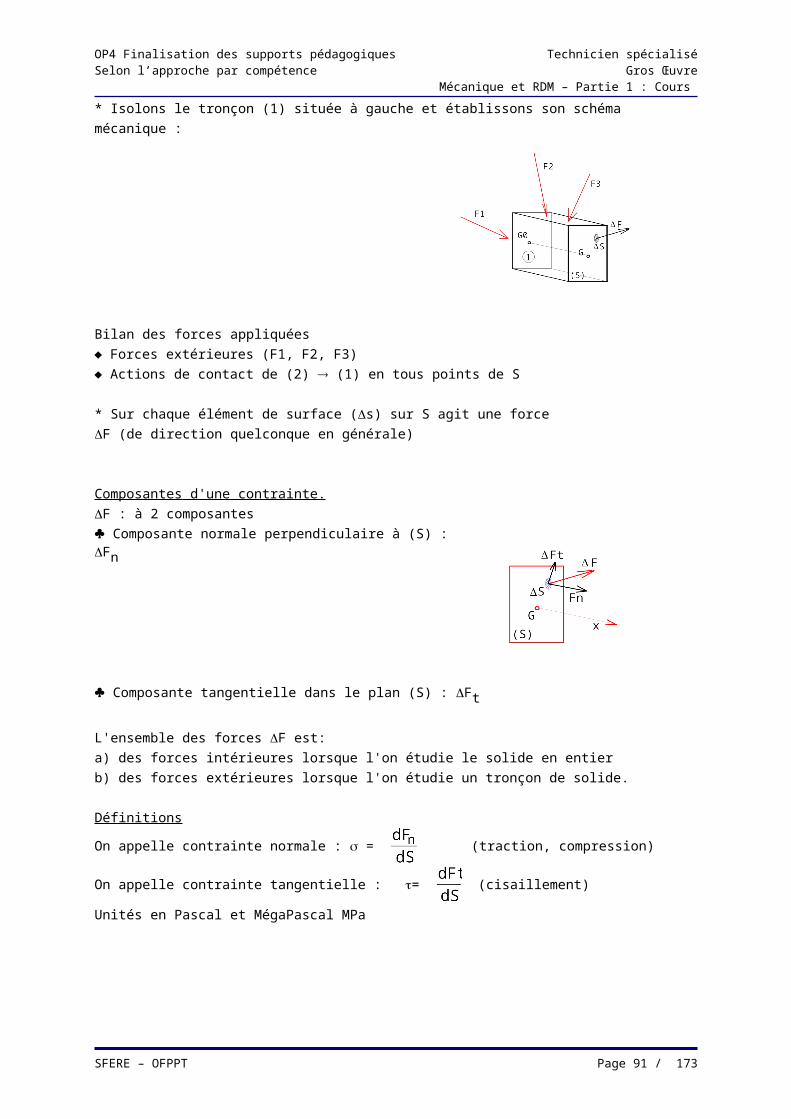
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.2.4. Tracé
Avec équations Sans équations
Exemple de résultats
SFERE – OFPPT Page 91 / 137
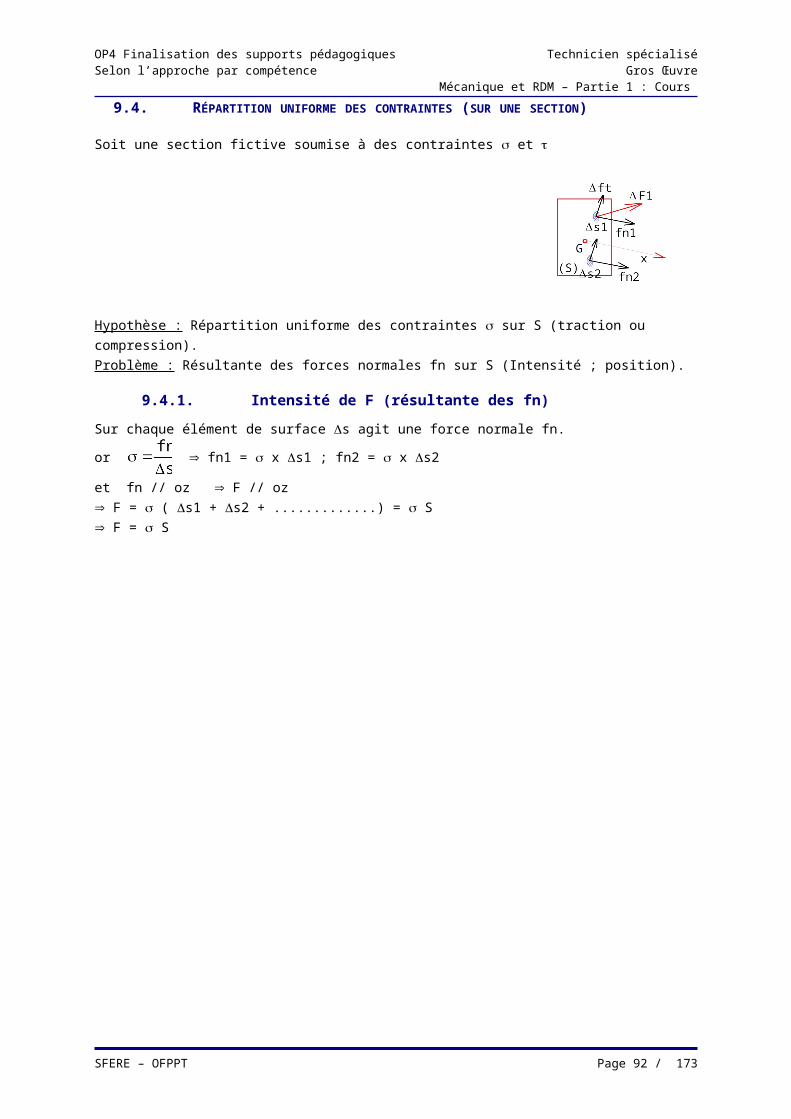
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.3. EXERCICES
Pour chacun des schémas mécaniques ci-dessous
1/ Donner l'équation de V(x) et du moment fléchissant M(x) le long de la poutre.
(littéralement pour les 4 premiers schémas, puis prendre L =5 m, a =2 m, p = 2 kN/m, q= 5
kN/m et F = 10 kN pour les autres cas
2/ Tracer les diagrammes correspondants (allure et valeurs particulières)
Tracer l'allure des graphes de V(x) et M(x) des schémas mécaniques suivants :
SFERE – OFPPT Page 92 / 137
q L
q
A BL
L/2P
L
q
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
12.4. DIAPORAMA
Voir dans la partie « ANNEXES » de ce document.
SFERE – OFPPT Page 93 / 137
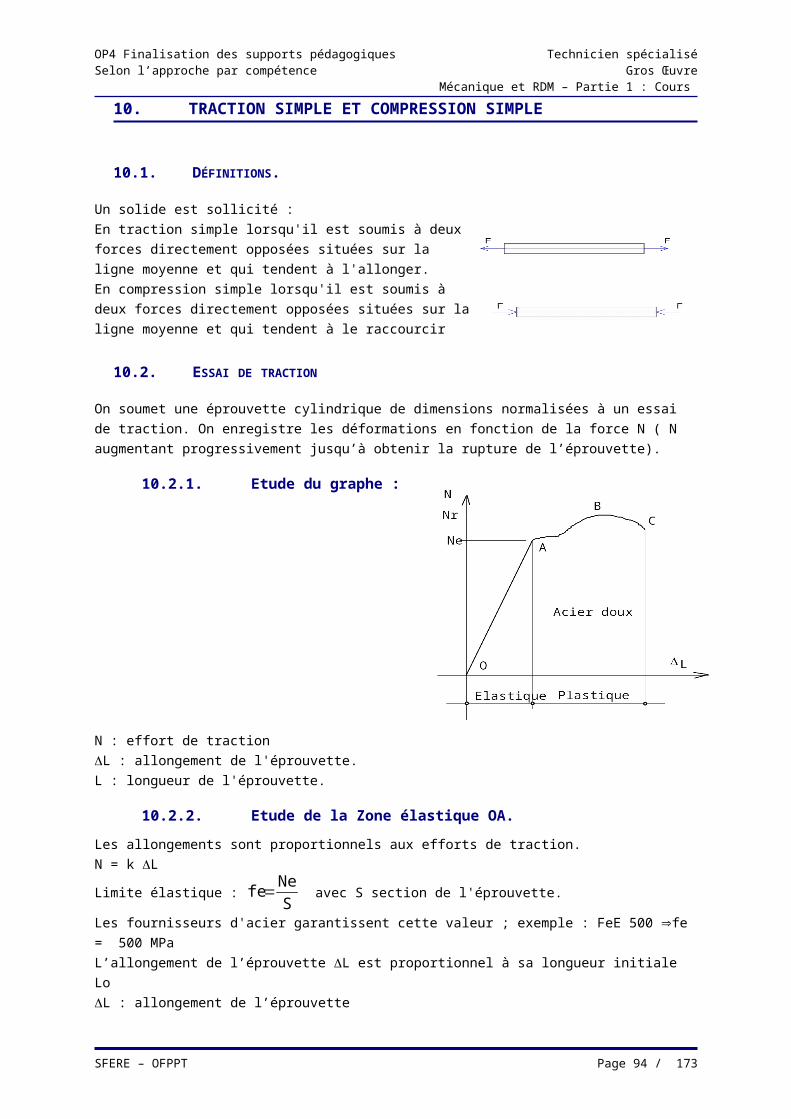
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
13.CARACTÉRISTIQUES DES SESSIONS
13.1. MOMENT STATIQUE
13.1.1. Hypothèse
Soit une section S appartenant à un plan x.o.y soumise à des contraintes proportionnelles à x ( =
k.x).
avec
avec
Remarque : Si l’axe oy traverse S, les f sont de sens contraire de part et d’autre de oy.
SFERE – OFPPT Page 94 / 137
1 = k.x1
2 = k.x2
3 = k.x3
oz xf1f2f3
S1
S3
S2
x1
x2
x3
o x
12
3
y
S1
S3
S2
x1
x2
x3
o
z
x
f1f2
f3
y
y
z y
x
f1 = k.x1.S1
f2 = k.x2.S2
f3 = k.x3.S3
S
S
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
13.1.2. Problème
On veut déterminer l’intensité de la résultante R des f qui sera appelé :
= Moment statique de S/oy (oy appartenant au plan de S)
R = f1 + f2 + f3….
= k.x1.S1 + k.x2.S2 + k.x3.S3 +….
= k.x.S
Si S0 R = k
13.1.3. Définition du Moment statique
Moment statique de S/oy
Ay = Moment statique de S/ox
Ax =
Exercice : Calculer le moment statique d’un rectangle /base en fonction de b et h.
13.1.4. Propriété du Moment statique
a / On sait que XG =
Ay = XG x S
Ax = YG x S
b / Si oy passe par G XG= 0 Ay = 0
c / Unité : L3 ( m3, cm3 …) et Signe de Ax ou Ay : Quelconque.
Exercice : Recalculer le moment statique d’un rectangle /base en fonction de b et h, mais en utilisant
le C.D.G.
SFERE – OFPPT Page 95 / 137
b
h
x
y
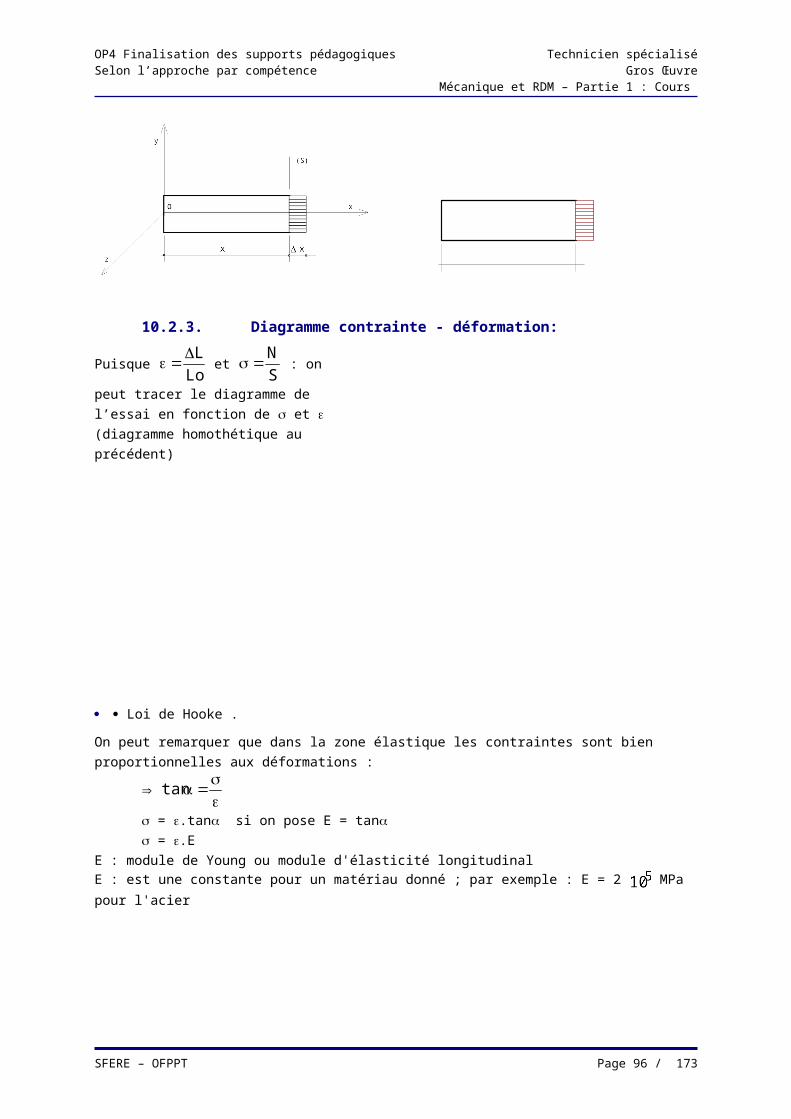
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
13.2. MOMENT QUADRATIQUE
13.2.1. Hypothèse
Même hypothèse que pour le moment statique.
13.2.2. Problème
On veut déterminer le moment résultant/oy. = Moment quadratique de S/oy (oy appartenant au plan
de S)
Mtr/oy = f1.x1 + f2.x2 + f3.x3 + …..
= 1.S1.x1 + 2.S2.x2 + 3.S3 x3 +….
= k.x1.S1.x1 + k.x2.S2 x2 + k.x3.S3 x3+….
= k.x1².S1 + k.x2².S2 + k.x3².S3 +….
Mtr/oy = k x².ds
= k
13.2.3. Définition du Moment quadratique
Moment quadratique de S/oy
Iy = Moment quadratique de S/ox
Ix =
13.2.4. Unité : L4 ( m4, cm4…..)
Exercice : Déterminer le moment quadratique d’un rectangle
1/base (ox) en fonction de b et h
2/médiatrice (Gx’)en fonction de b et h
SFERE – OFPPT Page 96 / 137
b
h
x
y
x’G
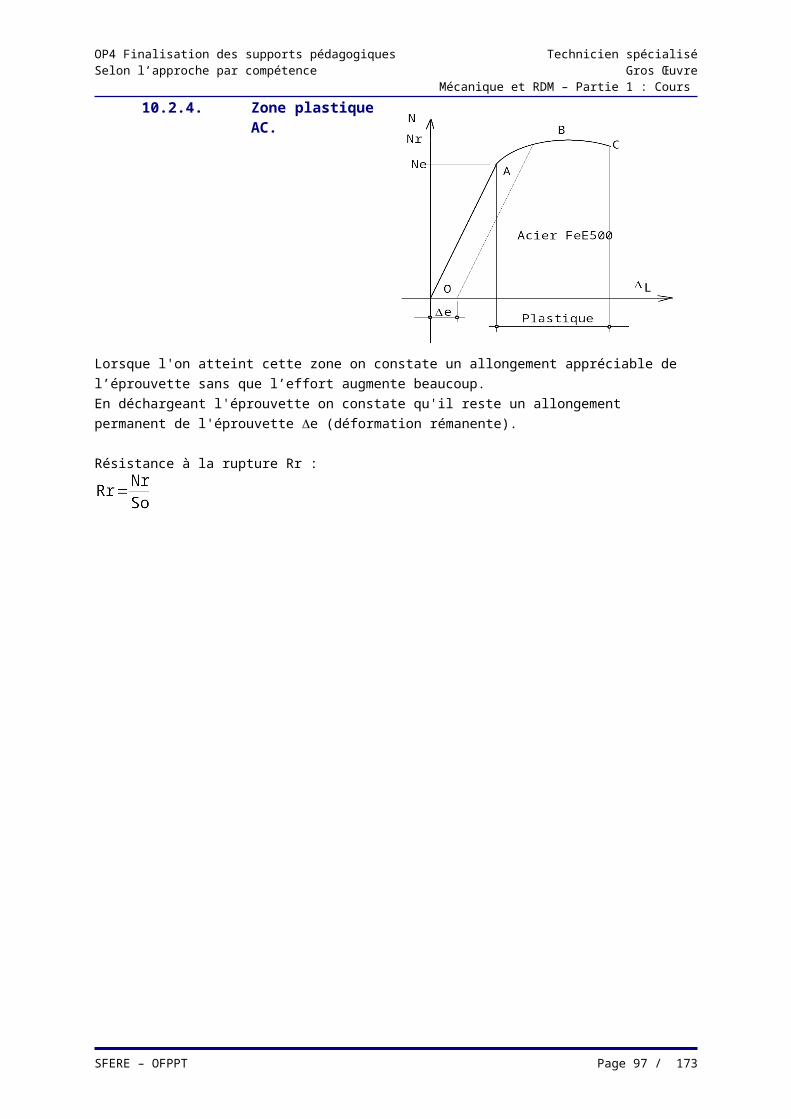
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
13.3. CHANGEMENT DE COORDONNEES ( TH D’HUYGENS)
Problème
Connaissant Ix’ on veut déterminer Ix ; Or Ix =
Soit le point M à l’abscisse y
Ix = =
Ix = Signe de Ax ou Ay : Quelconque.
Ix = +2d + d²
Ix = Ix’ + 2d + Sd²
Théorème d’HUYGENS
Ix = Ix’ + Sd²
S : Aire de la section
d : Distance entre les 2 axes
N.B : Le théorème d’Huygens permet de déterminer le moment quadratique d’une surface par rapport
à un axe quelconque, en partant uniquement d’un axe passant par G dont on connaît le moment
quadratique, et en y ajoutant le terme Sd² (les 2 axes étant //).
SFERE – OFPPT Page 97 / 137
M
y
x
x’
y
H
dG
= Ay/Gx’= 0

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
13.4. EXERCICES
1/ Déterminer les moments statiques et quadratiques des sections suivantes :
a/ par rapport à ox
b/ par rapport à oy
c/ par rapport à Gx’
2/ Déterminer les moments quadratiques/ Gz (cdg de l’ensemble) des sections suivantes, composées
d’assemblage soudé de profilés du commerce.
13.5. MOMENT QUADRATIQUE POLAIRE
13.5.1. Hypothèses
Soit une section S appartenant à un plan x.o.y soumise à des contraintes tangentielles avec :
a/ proportionnelles à x (=
k.x).
b/ perpendiculaire au rayon
issu de oz.
a/ ou ft dans le même sens
de rotation/ oz ( cas de la
torsion).
SFERE – OFPPT Page 98 / 137
x
x’
y
G
x
x’
y
G
50 mm
5 m
m5
mm
100
mm
3 mm
5 mm
4 m
m
35 mm
40 m
m
ft = .S
1 = k.1
2 = k. 2
3 = k. 3
S1
S3
S2
x
2
3
oft1ft2
ft3
y
S
2
1
et
zG
UAP 100
IPE 200
IPE 200
IPE 200
G z

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
13.5.2. Problème
On veut déterminer le moment résultant des ft/oz. = Moment quadratique polaire de S/oz (S
appartenant au plan xoy)
Mtr/oz = f1. 1 + f2. 2 + f3. 3 + …..
= k. 1.S1. 1 + k. 2.S2 2 + k. 3.S3 3+….
= k. 1².S1 + k. 2².S2 + k. 3².S3 +….
Mtr/oy = k ².s
= k
13.5.3. Définition du Moment polaire
Moment quadratique polaire de S/oz
Ip =
13.5.4. Unité : L4 ( m4, cm4…..)
13.5.5. Propriété :
² = x² + y²
Ip = = + Le moment quadratique polaire est la somme des moments quadratiques/ 2 axes perpendiculaires
Ip = Ix + Iy
SFERE – OFPPT Page 99 / 137
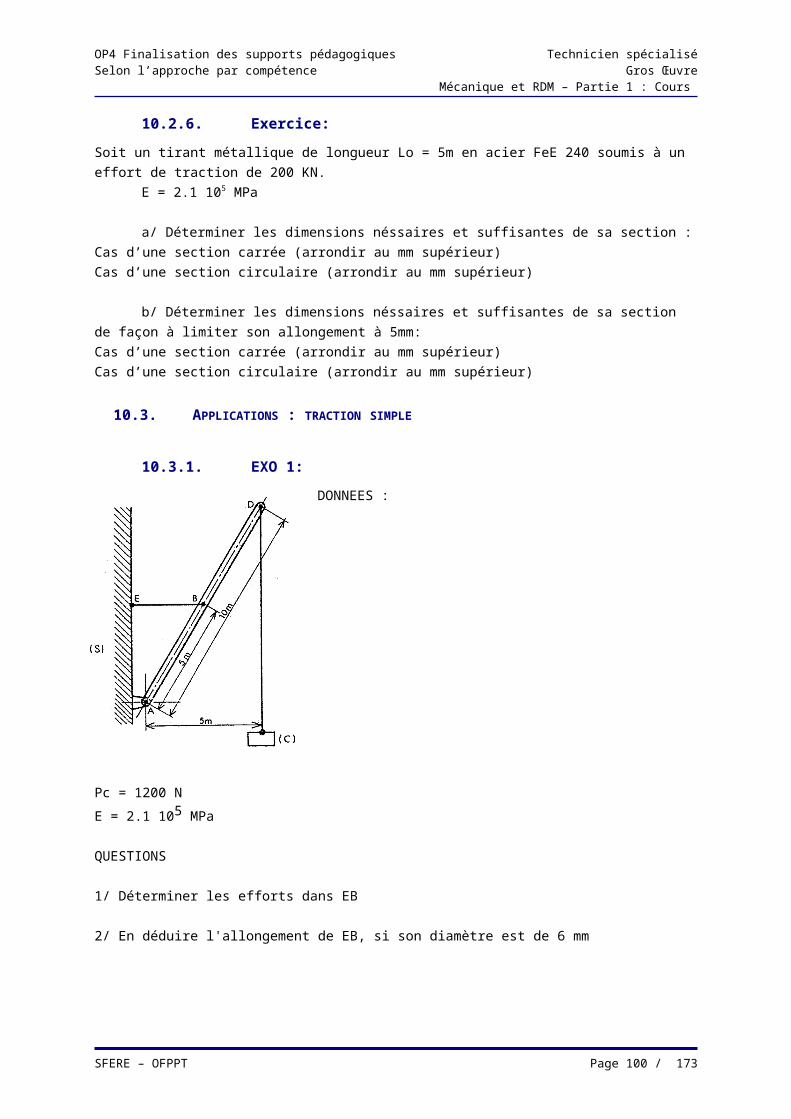
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.CONTRAINTES DES POUTRES FLÉCHIES
14.1. HYPOTHÈSES.
Poutre comportant un plan de symétrie vertical.
Lignes d'action des forces dans ce plan de symétrie
Poutre en flexion simple (N=0 ; V0 ; M0)
14.2. CONTRAINTES NORMALES (DUES À M(X).
Soit la poutre suivante reposant sur deux appuis simples et soumise à la flexion.
Etudions la section (S) :
Isoler un petit tronçon de longueur dx.
D'après Navier Bernoulli les sections droites restent planes pendant la déformation.
On constate donc une rotation de la section (S) autour de G.
Les allongements ou les raccourcissements sont proportionnels à l'ordonnée y de la fibre
correspondante.
Prenons une fibre ab’// ligne moyenne
SFERE – OFPPT Page 100 / 137
dx
S

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
bb’= x = -y d (x <0 qd. d >0
En appliquant la Loi de Hooke : = E:
On déduit que les contraintes normales sont proportionnelles aux déformations
: déformation
E : module de Young ou module d'élasticité longitudinal.
= E = = E = est proportionnelle à y
SFERE – OFPPT Page 101 / 137
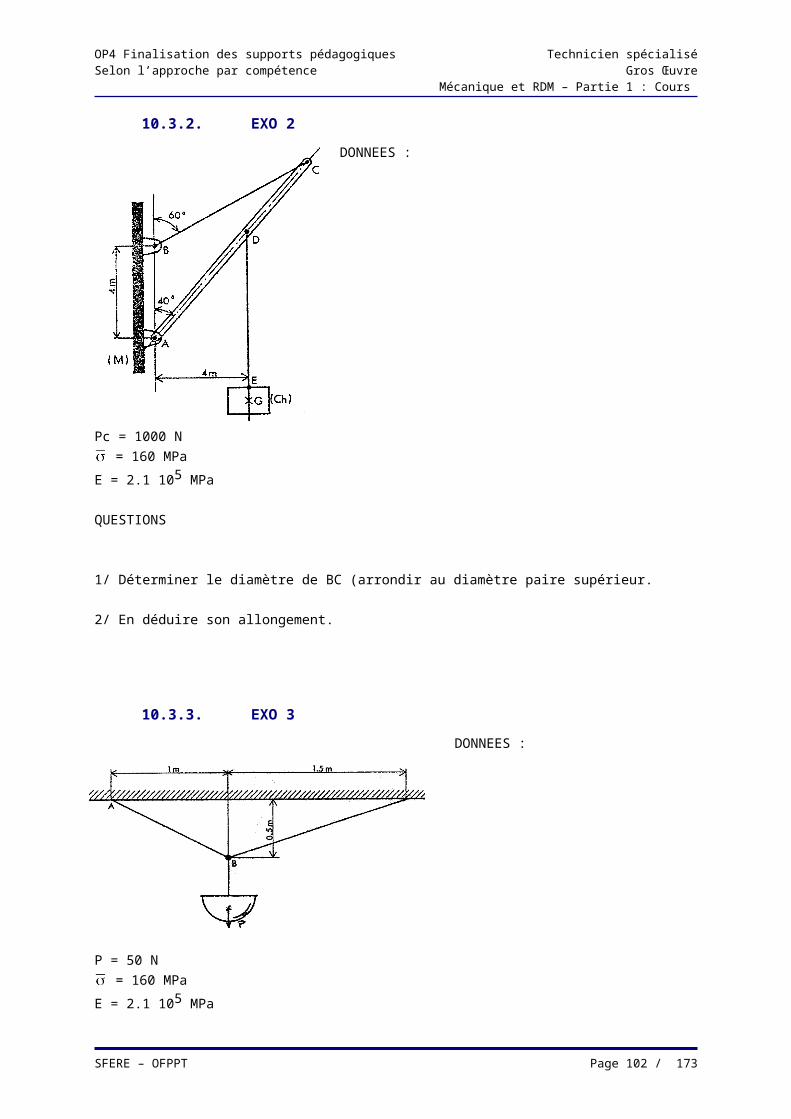
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.3. DÉFORMATIONS.
Hypothèses : On néglige l’influence de V
La section S étant en équilibre :
Les forces élémentaires exercées sur la section (S) (forces de liaisons) doivent équilibrer le moment
fléchissant M.
Calcul du moment résultant . des efforts sur S :
= = - M
df = ds et = k y
= = = -E. = - E. = - M
Expression de (Contrainte normale).
Avec : (y) = contrainte normale à l’ordonnée y et l’abscisse x de la poutre.
y ordonnée du point de calcul de .
M(x) Moment fléchissant à l’abscisse du point de calcul
SFERE – OFPPT Page 102 / 137
Contrainte de flexion : (y) =
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Contraintes ExtrêmesPour obtenir les contraintes normales extrêmes sollicitant une poutre donnée, il suffit de « prendre »
les moments extrêmes ( Mmax) et les ordonnées extrêmes de la section.
Fibre sup ..... sup =
Fibre inf ..... inf =
SFERE – OFPPT Page 103 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Utilisation de l’expression a/ Vérification d’une section donnée :
Données: Mf maxi
I/GZ
ad
Calcul de et vérifie < ad
b/ Choix d’un profilé du commerce :
Données: Mf maxi
ad
On veut : = ad
Posons v = y
=
avec = caractéristique du profilé ( dans un tableau)
Remarque : quand le profilé est symétrique
Exercice : Etablir la formule de (max) pour une section rectangulaire pleine en fonction de b et h.
14.4. CONTRAINTES DE CISAILLEMENT LONGITUDINAL (DUES À V(X))
Mise en évidence :
Soit un empilage de planches (ou autre) reposant sur deux appuis simples et soumises à de la flexion.
SFERE – OFPPT Page 104 / 137
On remarque que les planches glissent les
unes sur les autres ce qui implique des
contraintes au plan de glissement
( contraintes tangentielles )
déformation
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Expression de :
Soit le tronçon de poutre de longueur dx. Sur ce tronçon étudions la portion inférieure représentée par
des hachures. L'équilibre de ce morceau de tronçon nous permet d'écrire :
+ + = 0 si on peut considérer sur dx que est constant
= si en le moment fléchissant est égal
en le moment fléchissant est égal
= = =
= - =
or = Moment statique de So par rapport à Gz
= = sachant que l'effort tranchant V =
: contrainte de cisaillement longitudinal au niveau de la corde (coupure fictive)
SFERE – OFPPT Page 105 / 137
=

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
V : effort tranchant
/Gz : moment statique /Gz de la portion de section située au-delà de y: Inertie totale de la section / Gz
b : est la largeur de la coupure fictive.
SFERE – OFPPT Page 106 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Exercices :
1/ Etablir la formule des situées sur G(z) pour une section rectangulaire pleine en fonction de V,b et
h
2/ Tracer le diagramme d’évolution des le long d’une section rectangulaire en fonction de V, b et h
pour y = h/2, h/4, 0 et symétriquement.
3/ Tracer le diagramme d’évolution des le long d’une section d’ I.P.E défini ci-dessous pour les point
A, B+, B-, C, G et symétriquement
SFERE – OFPPT Page 107 / 137
x
x’
y
G
50 mm
5 m
m5
mm
h =
100
mm
3 mm
A
B
C
h/4
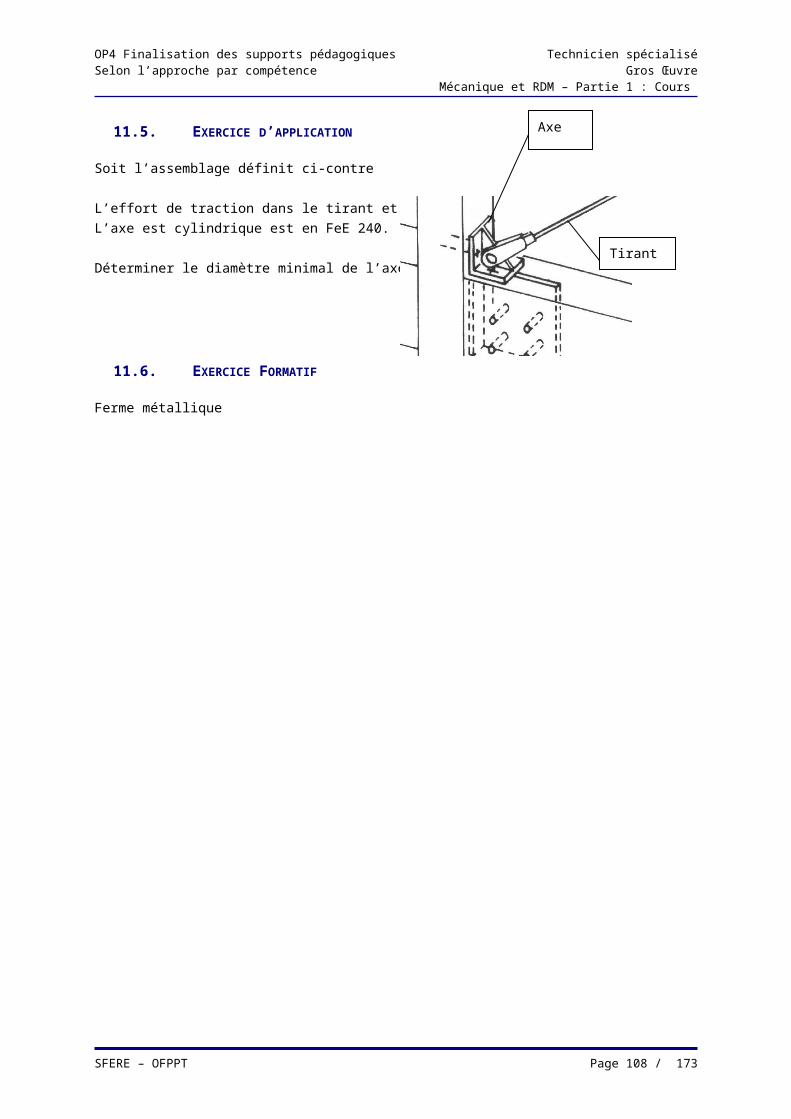
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.5. APPLICATIONS
14.5.1. PLONGEOIR
L'ensemble proposé sur la figure est un plongeoir à une seule planche utilisé sur le bord des piscines.
Soit à étudier la flexion de la planche ABC représentée schématiquement sur les figures 2 et 3. Le
poids propre de la planche est négligé.
1/ Déterminer les actions mécaniques de contacts exercées en A et B sur la planche
2/ Tracer les digrammes de V(x) et M(x) (sans équations) en précisant toutes les valeurs particulières.
3/ Tracer le diagramme des contraintes normales sur la section la plus sollicitée (section 30 x 600 mm
sur le tronçon AB)
4/ Calculer la contrainte de cisaillement maxi (section 30 x 600 mm sur le tronçon AB)
SFERE – OFPPT Page 108 / 137
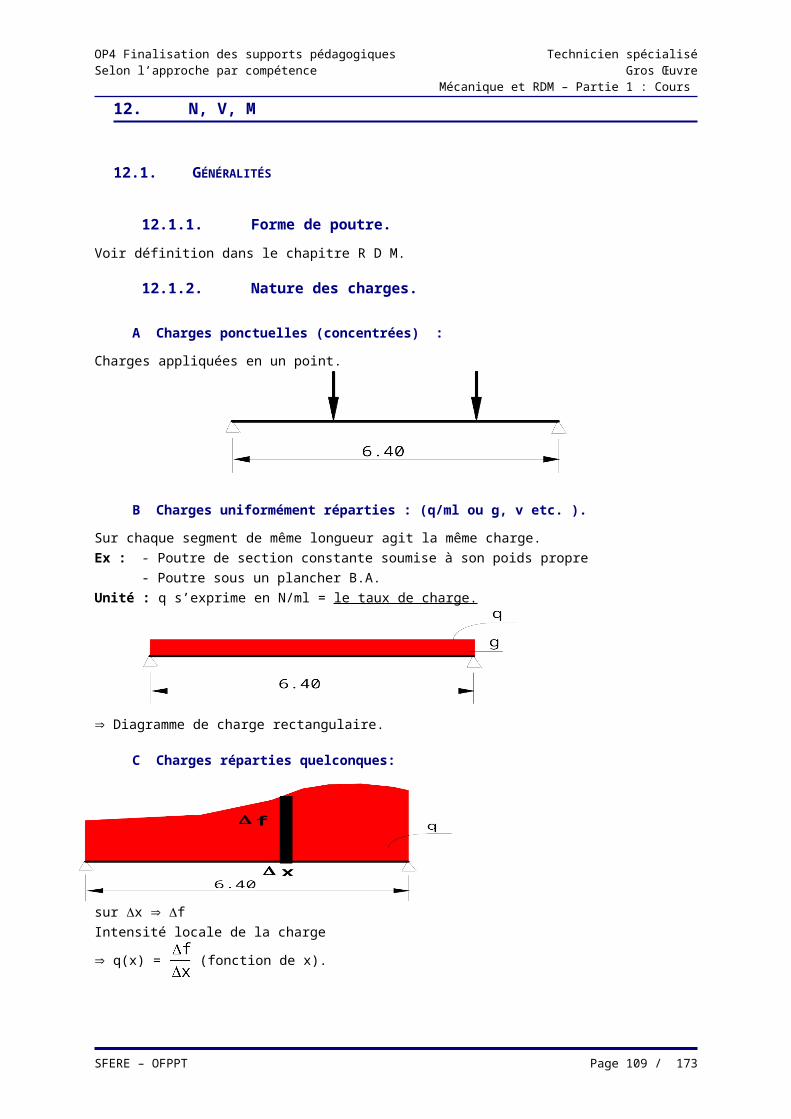
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.5.2. PORTIQUE TOURNANT
Le portique tournant, d'une usine de poutres B.A préfabriquées, proposé sur les figures 1 et 2 se
compose d'une poutre principale en I. La poutre est liée en A ( liaison pivot ou articulation vertical )à
un fût fixe 2, elle est en appui sur un support mobil 3. Ce support est guidé par un rail circulaire ( rayon
R, centre A ), il est équipé de deux moteurs. L'ensemble tu portique pivote autour de A. Le porte-palan
avec cabine 4 translate le long de AC, il peut effectuer le levage d'une charge ne dépassant pas
10000 daN.
Notre étude portera sur la poutre 1 dont on propose le schéma de calcul (fig. 3). Les 500 daN/m
correspondent au poids propre de la poutre, et la charge de 10000 daN est située en C (cas le pus
défavorable ).
1/ Déterminer les actions mécaniques de contacts exercées en A et B sur la poutre
2/ Tracer les diagrammes de V(x) et M(x) le long de la poutre (sans équations) en précisant toutes les
valeurs particulières.
3/ Tracer le diagramme des contraintes normales sur la section B (section la plus sollicitée : fig 4).
4/ Calculer la contrainte de cisaillement en C. ( même section qu'en B, excepté la hauteur = 800 mm).
Vous justifierez succinctement le choix de cette section.
SFERE – OFPPT Page 109 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.5.3. CUVE DE STOCKAGE
La cuve de stockage proposée ci-dessous est réalisée d'une virole (1)et de deux fonds (2 et 3) soudés
aux extrémités. La cuve repose sur deux supports (4 et 5) posés à même le sol (0).
On se propose d'étudier le comportement de la cuve en flexion.
Le schéma de calcul correspondant est défini fig. 2, dans lequel la charge répartie q de 5000 daN
représente l'action exercée par le liquide contenu dans la cuve.
1/ Déterminer les actions mécaniques de contacts exercées en A et B sur la cuve.
2/ Donner les équations de V(x) et M(x) le long de la poutre, ainsi que toutes les valeurs particulières.
2/ Tracer les diagrammes de V(x) et M(x) le long de la poutre.
3/ Déterminer littéralement la valeur de a en fonction de L donnant le même moment maxi sur appuis
qu'en travée (en valeur absolue).
4/ Tracer le diagramme des contraintes normales sur la section de cuve située sur l'appui A.
SFERE – OFPPT Page 110 / 137
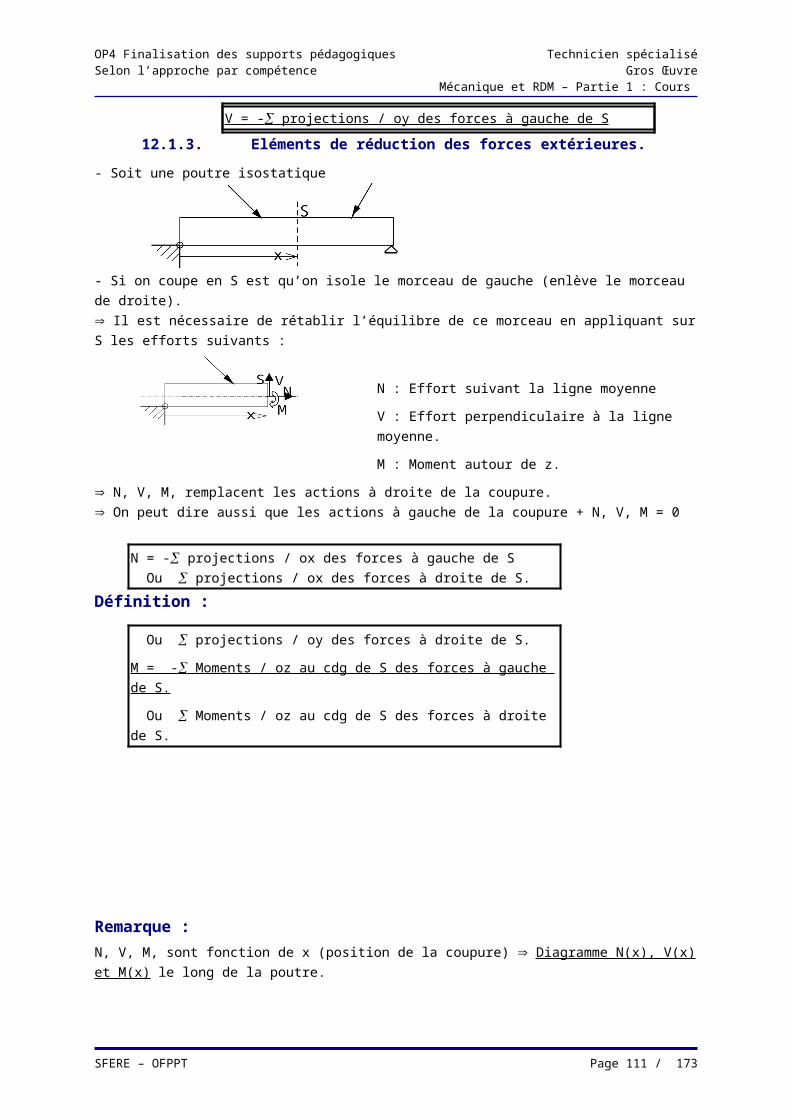
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.5.4. PONT ROULANT
Le pont roulant ci-dessous proposé sur la figure 1 se compose d'une poutre principale (1) ( Profilé
IPER ) monté sur deux sommiers latéraux (3) ( composés chacun de deux UAP soudés). L'ensemble
translate sur deux rails (0) aux moyen de deux moteurs de translation (4).
La charge est fixé au crochet (5), et manœuvrée par le palan (2) ( levage et translation le long de (1)).
L'élément étant le boîtier de commande.
A ETUDE DE LA POUTRE 1
Le palan 2 occupe la position définie par la figure 2 ( a = 4000 mm ). Le schéma de calcul de la poutre
ABC est représenté par la figure 3.
P représente l'action exercée par le palan sur (1) dont le poids propre est négligé
1/ Déterminer RA et RB.
2/ Tracer les graphes de V(x) et M(x) en précisant toutes les valeurs particulières.
3/ Exprimer RA en fonction de P, a et L; puis l'équation de M(x) en fonction de P, a et L ( dans le
tronçon AB ).
SFERE – OFPPT Page 111 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
4/ Déterminer la valeur de a donnant le moment fléchissant maxi pour le tronçon AB et en déduire sa
valeur numérique.
5/ Si Mmax = 80.1 kN/m et la = 100 MPa, choisir L'IPER qui convient.
B ETUDE DU SOMMIER 3
Le chargement maximum du sommier est obtenu lorsque le palan (2) est situé au droit de l'appui
correspondant, la charge est P (3000 daN ). L'étude du sommier se ramène schématiquement à la
poutre DAE figure 5 (le poids propre du sommier sera négligé).
1/ Déterminer le moment maxi dans le sommier.
2/ Choisir l'UAP nécessaire et suffisant pour satisfaire la condition de résistance si = 160 MPa.
3/ Vérifier que la contrainte de cisaillement longitudinal reste inférieur à 150 Mpa dans le sommier.
SFERE – OFPPT Page 112 / 137
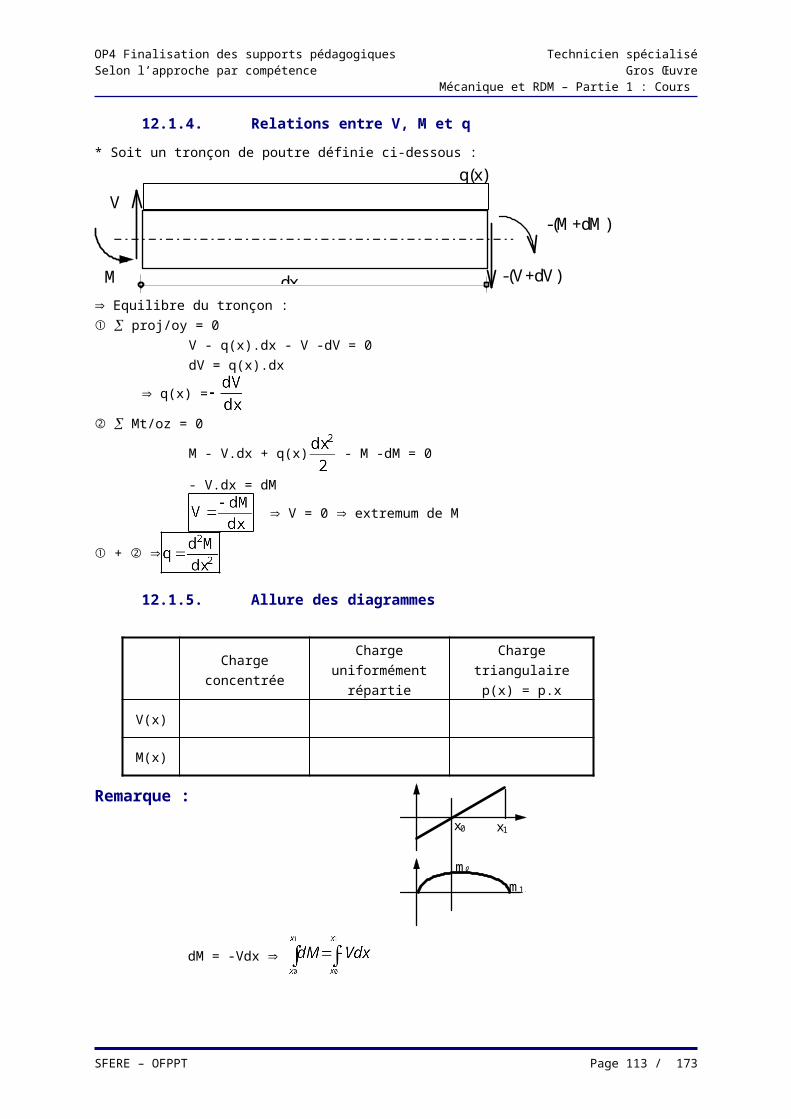
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 113 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
14.5.5. ANTENNE RADIO
Pour effectuer le levage d'une antenne radio on utilise le montage de la figure 1. L'antenne (1) est liée
à sa base O à un mât de charge (2)de 15 m de long. Le câble (5) , lié en B à (2) et en A sur (1),
maintient constant l'écartement AB ( l'angle BOA reste constamment égal à 90° ) Un deuxième câble
(4) fixé en B sur (2) et en D à un treuil réalise le levage de l'ensemble (1) + (2) + (5). Cet ensemble
pivote autour de O jusqu'à la position verticale.
On se propose étudier le comportement de l'antenne en flexion au début du levage (OA horizontal )
dont le schéma de calcul est définit à la figure 3.
1/ Donner la charge répartie q ( poids propre de l'antenne/m )
2/ En déduire les actions mécaniques de contact en O et A.
3/ Déterminer le diamètre minimal du câble (5) réalisé en acier dont e = 1600 Mpa et compte tenu
d'un coefficient de sécurité de 6.
4/ Tracer les diagrammes de N(x), V(x) M(x) de long de l'antenne. Préciser les valeurs particulières.
Dans la suite du problème On négligera l'effet de N(x).
5/ Déterminer le moment quadratique de la section de l'antenne définit par la figure 4.
6/ Tracer le diagramme de Navier
de la section de l'antenne située
sur l'appui A.
SFERE – OFPPT Page 114 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
15.FLEXION COMPOSÉE
15.1. DÉFINITION
Un élément est soumis à de la flexion composée, si étant sollicité en flexion simple il est soumis en
plus à un effort normal.
Flexion composée (N0 ; V0 ; M0)
15.2. EXEMPLES
Arbalétrier d’une ferme
Poutre inclinée
Poteau de portique
Etc…
15.3. CONTRAINTES NORMALES
Puisque l’élément en flexion composé est soumis à M(x) et à N(x) les contraintes auront deux
origines
f (due à M(x)) = (diagramme triangulaire)
N (due à N(x)) = (diagramme rectangulaire)
En appliquant le principe de superposition on peut écrire :
=
Le diagramme des contraintes ( ou de Navier) sur une section donnée pourra être défini en
additionnant les diagrammes de f et N
SFERE – OFPPT Page 115 / 137
p
p
p
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Allures possibles du diagramme
Valeurs relatives de f
et N
Diagramme du à N(x) :
N (+)
Diagramme du à M(x) :
f (+ en haut)Diagramme Résultat
>
=
<
Remarque (fibre neutre , ligne moyenne)
Exercice
Soit une section d’une poutre en bois de hauteur h = 50 cm et de largeur b = 10 cm soumis à un
moment fléchissant = 5 kN.m et à un effort normal N = 50 kN
1/ Tracer le diagramme de Navier sur cette section ( précisez les valeurs extrêmes
2/ Déterminer e (distance entre la fibre neutre et la ligne moyenne en fonction de N, I/GZ, M et S
3/ En déduire la valeur de e.
15.4. CONTRAINTES TANGENTIELLES
Les contraintes tangentielles n’étant engendrées que par la flexion (V(x))
Comme en flexion simple
SFERE – OFPPT Page 116 / 137
=
l.m l.m l.m
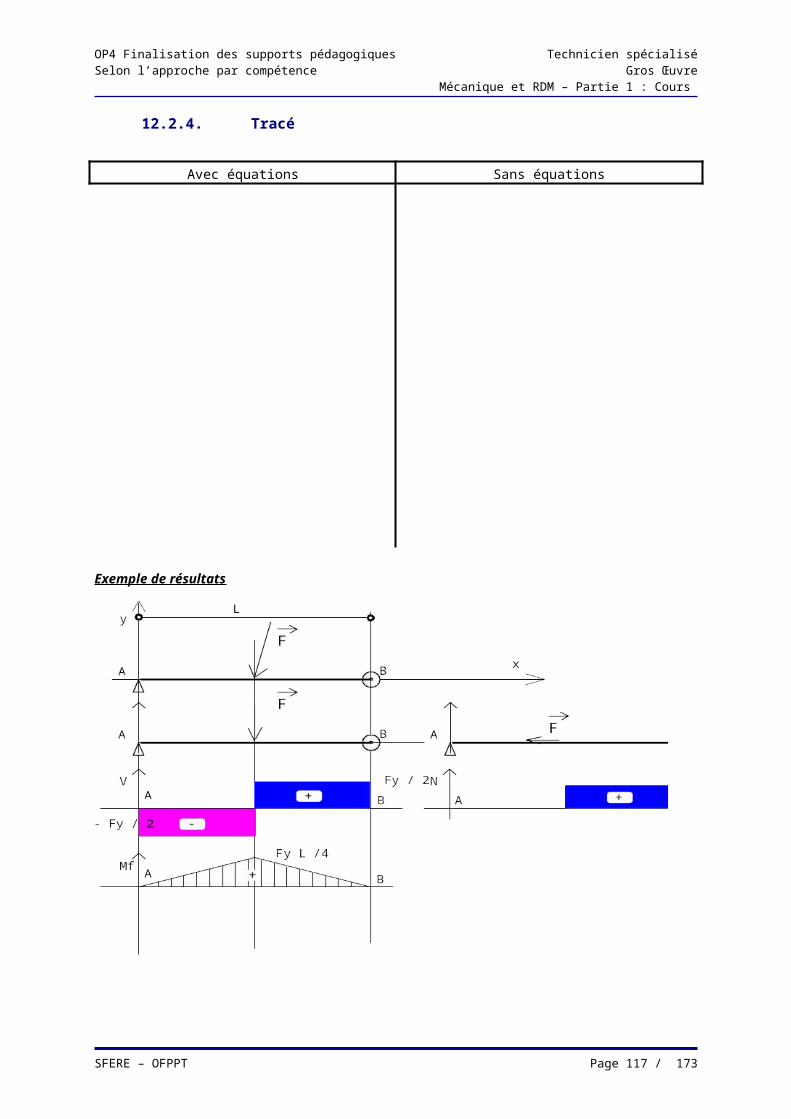
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
15.5. EXCENTRICITÉ DE CHARGE
Soit une pièce soumise uniquement à un effort normal N non appliqué au C.d.G de la section, mais
excentré d’une valeur e.
Remarque : pour faire la RdM il faut déterminer les éléments de réduction des charges au CdG de la
section (transférer les actions en G).
Conclusion : Une pièce comprimée ou tendue par une force non appliquée au CdG de sa section, est
sollicitée en flexion composée, (N et M = N.e)
Problème : Déterminer dans le cas ci dessus l’excentricité maxi e en fonction de h de façon qu’aucune
des fibres du poteau ne soit tendue.
Solution : Il faut > avec y = h/2 et I/GZ =
or M = Ne e (Noyau central)
15.6. REMARQUE
On ne peut déterminer une poutre en flexion composée (2 inconnues I/V et S pour une équation : ). On ne peut donc que la vérifier.
En pratique : choisir le profilé en flexion simple (néglige N(x)) puis vérifier en flexion composée.
SFERE – OFPPT Page 117 / 137
e
NG
h
n
e
Réduction
en G
NM =N.e
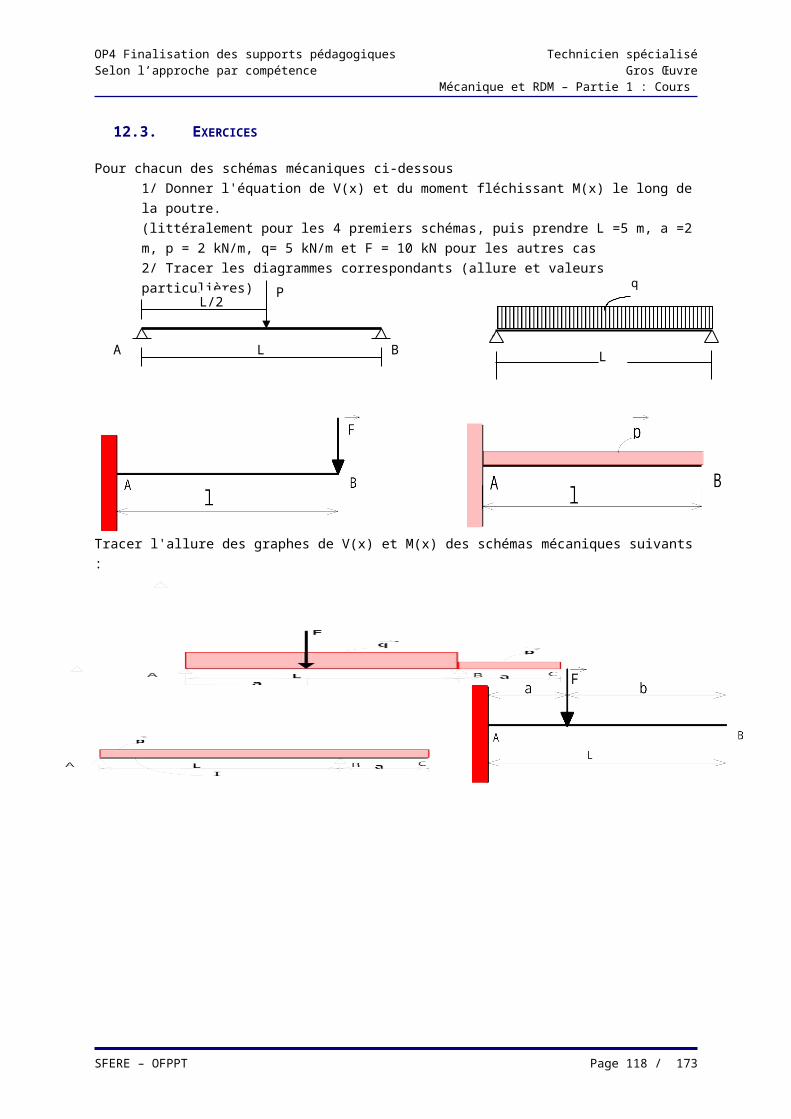
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
15.7. EXERCICES
Soit la ferme définie ci-dessous. L’entrait est un I.P.E 120 et les arbalétriers en I.P.E 160
1/ Déterminer l’effort dans l’entrait, puis en déduire le diagramme de Navier
2/ Etablir les diagrammes de N(x), V(x) et M(x) le long d’un l’arbalétrier.
3/ Tracer le diagramme de Navier sur la section A
4/ Donner la valeur de la contrainte maxi pour l’arbalétrier.
soit la prédalle précontrainte définie ci-dessous
On vous demande de vérifier la prédalle ( vérifier que la contrainte du béton situé sur la fibre
supérieure est toujours comprise entre 0 et 15 Mpa) dans les cas suivants
a/ au stockage
b/ au levage
SFERE – OFPPT Page 118 / 137
p = 8 kN/m horizontal
2.00
A
1.00
=5 mm55 m
m
2 m
m
115 mm
Données :
Câble
-Taux de travail du câble = 90 %
-Effort de rupture = 35 kN
Prédalle : longueur = 5.50 m
4 m
4 m
60°
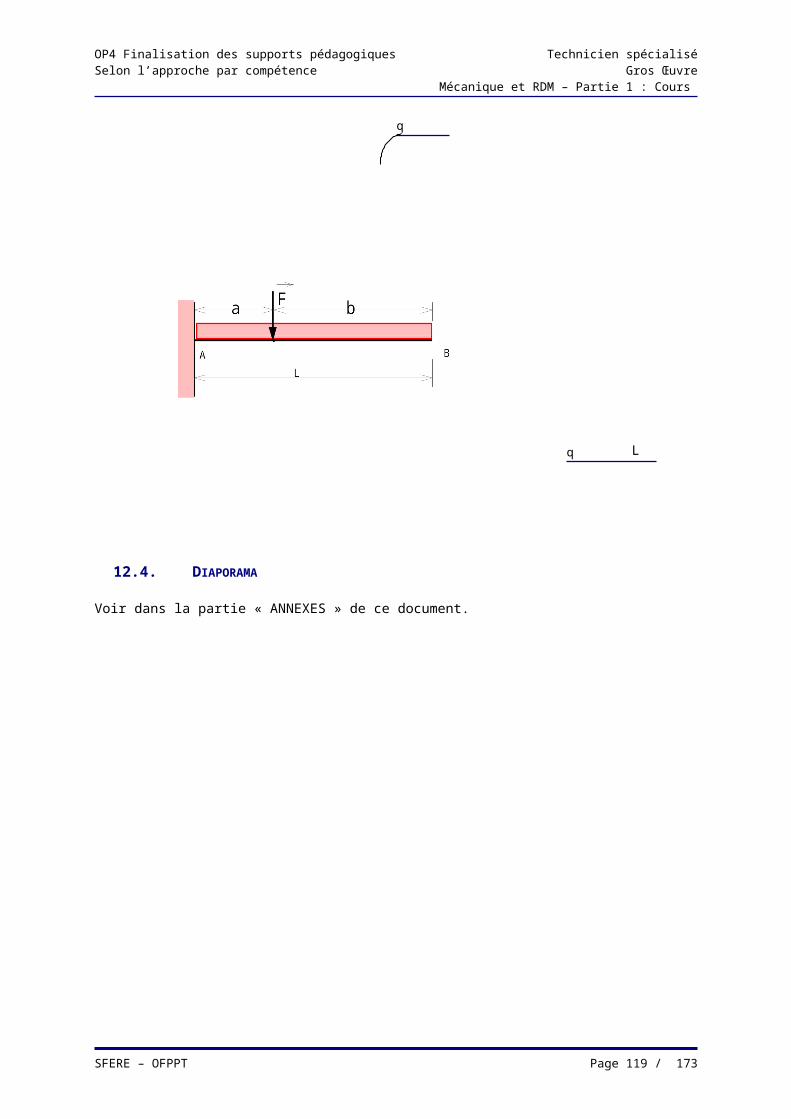
A
p N/ml
L
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
16.LES FLÈCHES
16.1. DÉFINITION
La flèche d’une poutre fléchie est la longueur du déplacement de sa ligne moyenne par rapport à sa
position théorique (droite) sous l’effet des charges qui lui sont appliquées
16.2. FORMULAIRE
Le formulaire fourni (pages 3 à 6) donne entre autres choses:
Les équations de V(x) (noté T ici) et de M(x)
L’équation de la déformée ( fonction des appuis et des charges)
Les valeurs particulières de V(x), M(x) et la flèche (F max, …)
16.3. UTILISATION
16.3.1. Vérification d’un profilé.
Ici les caractéristiques de la poutre ainsi que son chargement sont connus
Il suffit de vérifier que la flèche maxi reste inférieure à une flèche limite ou flèche admissible
Exemple : L/200 =portée/200)
Exercice
SFERE – OFPPT Page 119 / 137
P
flèche déformée
Questions (si p = 5 kN/m et L = 5 m)
a/ Déterminer le profilé à la résistance
( )
b/ Déterminer sa flèche maxi. ( E = 2.1
105¨Mpa)
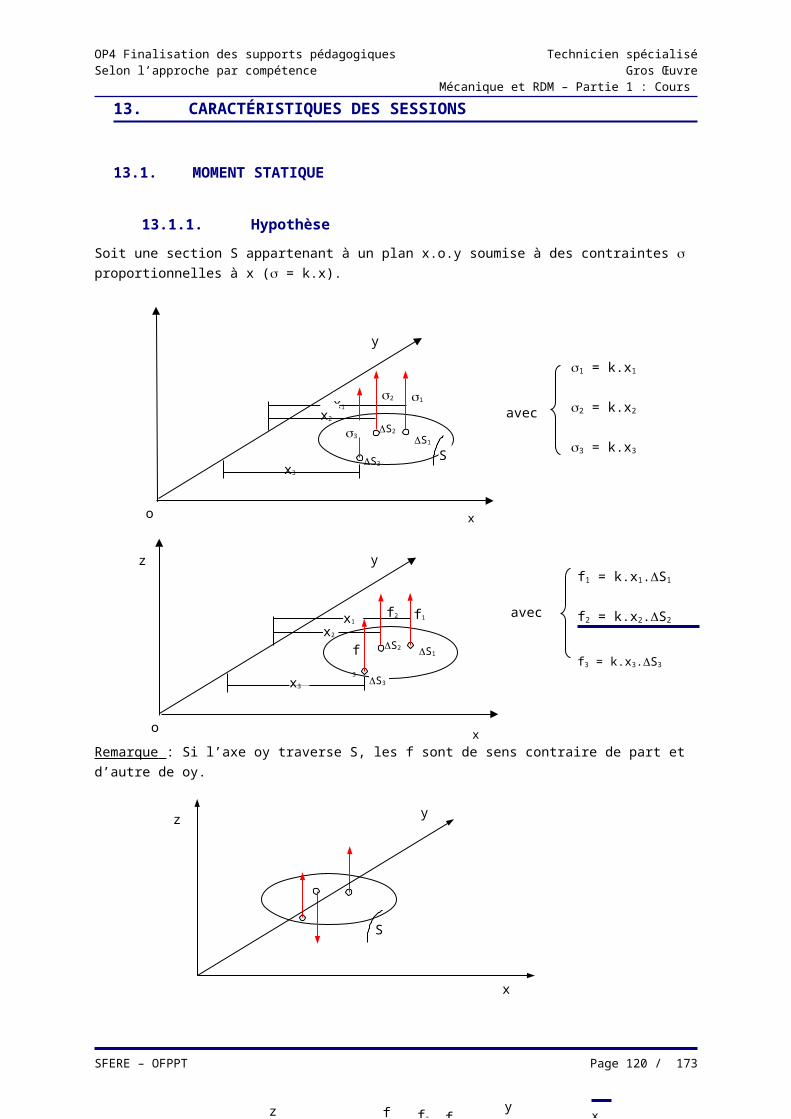
A
p N/ml
L
A
p N/ml
L
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
16.3.2. Détermination d’un profilé à la flèche.
Choisir le profilé nécessaire et suffisant pour satisfaire la condition de flèche imposée.
1/ Données
Formulaire des flèches
Schéma mécanique de la poutre
Tableau de profilé
Flèche admissible
2/ Méthode
Ecrire que la flèche (fonction de I/GZ ) flèche admissible
Sort I/GZ de l'inéquation choix du profilé (dans le tableau)
Exercice
16.3.3. Résoudre un problème hyperstatique
1/ Données
Formulaire des flèches
Schéma mécanique de la poutre : hyper de degré 1
2/ Méthode
Décomposer le schéma mécanique en 2 schémas isostatiques dont l’un des deux fait apparaître une
réaction d’appui.
Puis écrire que la somme des flèches au niveau de cet appui = 0 ; ce qui constitue une équation
supplémentaire. (permet de déterminer la réaction d’appui)
Exercice
Déterminer RB pour le schéma mécanique suivant
SFERE – OFPPT Page 120 / 137
Question (si p = 5 kN/m et P = 10 kN et =5
m)
En utilisant le principe de superposition,
déterminer le profilé nécessaire et suffisant
pour que la flèche maxi reste inférieur à
L/200
b/ Déterminer sa flèche maxi. ( E = 2.1
P
B
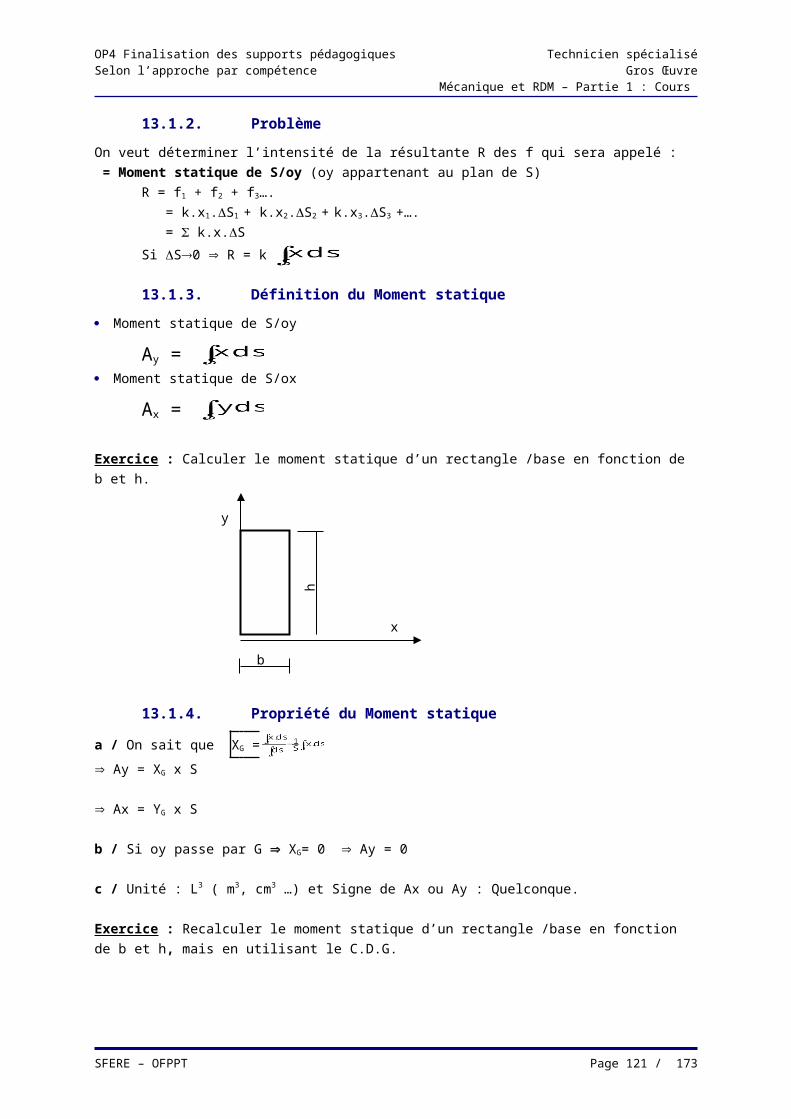
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 121 / 137
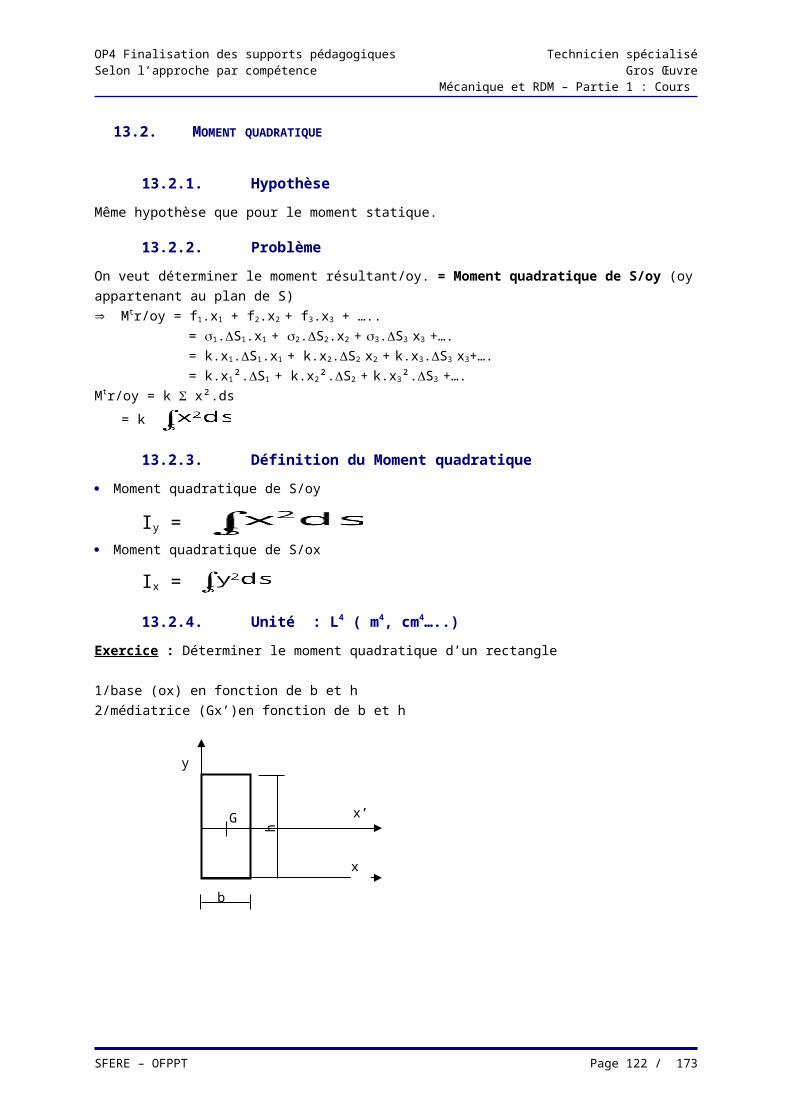
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 122 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 123 / 137
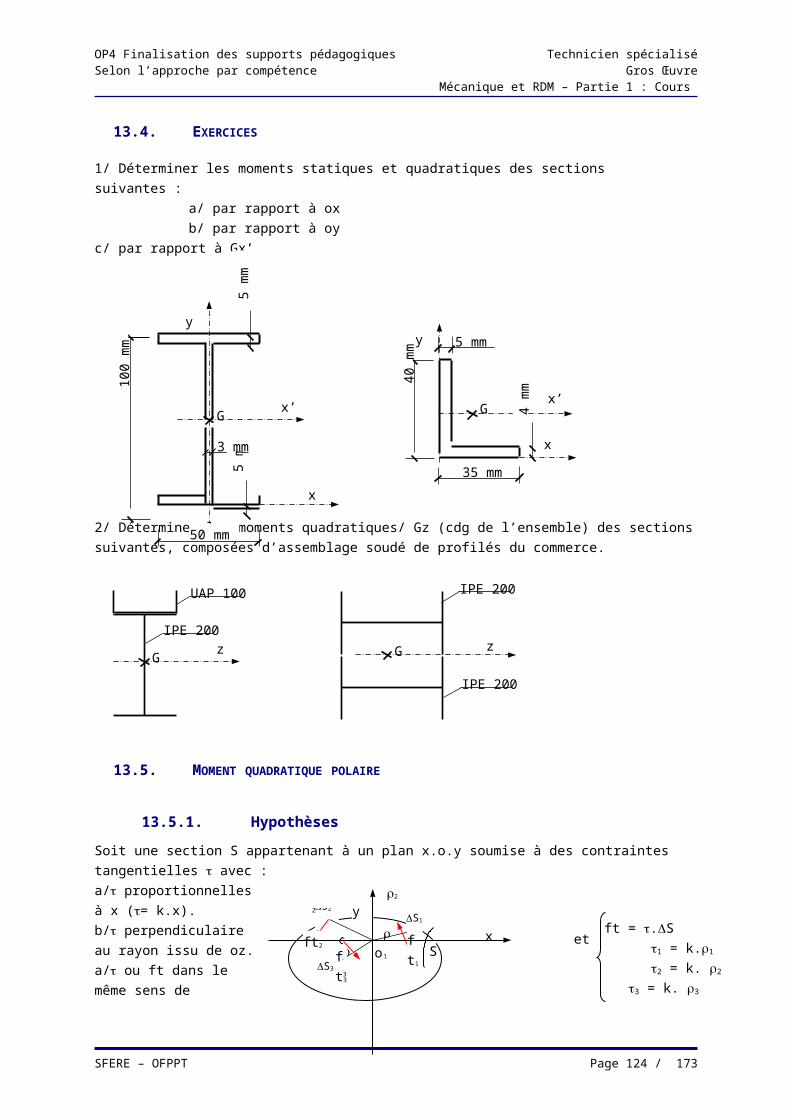
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 124 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
17. POUTRE CONTINUE EN BETON ARME
17.1. GÉNÉRALITÉ
On a remarqué qu’en utilisant les méthodes de R.D.M ( Méthodes des forces ; Théorème des trois
moments ) pour les poutres continues en B.A, les résultats obtenus ne coïncidaient pas avec la réalité.
En particulier les moments sur appuis sont surestimés. Cela vient du fait que les méthodes de R.D.M
Ne tiennent pas compte de la variation d’inertie de la poutre en béton ( inertie différente en travée
et sur appui )
Ne tient pas compte du caractère fluant du béton.
Est trop parfaite puisqu’elle tient compte des charges situées sur des travées éloignées de la
travée considérée, alors que le béton amorti rapidement les effets.
Par conséquent pour les poutres en B.A il existe 2 méthodes
Méthode forfaitaire
Méthode Caquot
Remarques
Calculs envisagés à l' ELU ou à l' ELS.
Ne concerne que les poutres associées à un plancher ou dalles calculées en flexion dans un seul
sens.
17.2. MÉTHODE FORFAITAIRE. ARTB.6.2,21 PAGE 149
17.2.1. Domaine d'utilisation. artB.6.2,210
a) Applicable aux planchers à charges d'exploitation modérée: QB soit G : charges permanentes
il faut QB 2G
ou
QB 5 kN/m2
b) Travées ayant même inertie.
c) Les portées successives sont dans un rapport compris entre 0,8 et 1,25.
d) Fissuration peu nuisible.
Ces quatre conditions sont impératives pour utiliser cette méthode forfaitaire définie ci- après.
SFERE – OFPPT Page 125 / 137

Ao
P
P
Ao
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
17.2.2. Principe de la méthode. artB.6.2,211
Principe de la méthode basé sur le phénomène d’adaptation des poutres en B.A
On évalue les moments maxi sur appuis et en travées en fonction du moment de flexion maxi Mo de la
travée iso associée ( avec le même chargement). Les moments correspondent à une fraction de Mo
Mt = kt x Mo Mt moment en travée
Ma = ka x Mo Ma moment sur appui
Les coefficients kt et ka sont choisis forfaitairement dans les plages définies au 2.3
Démonstration
Soit la poutre sur appuis simples
M0 = PL/4 A0
Soit la même poutre encastrée à chaque extrémité avec uniquement des aciers inférieurs
Après fissuration : Cas 1
Encore Mo A0
Soit encore la même poutre encastrée à chaque extrémité mais avec uniquement des aciers en
chapeau
Après fissuration :
M max= P/2 x L/2 =PL/4 = Mo
A0
SFERE – OFPPT Page 126 / 137
P
Ao
P/2 P/2
+
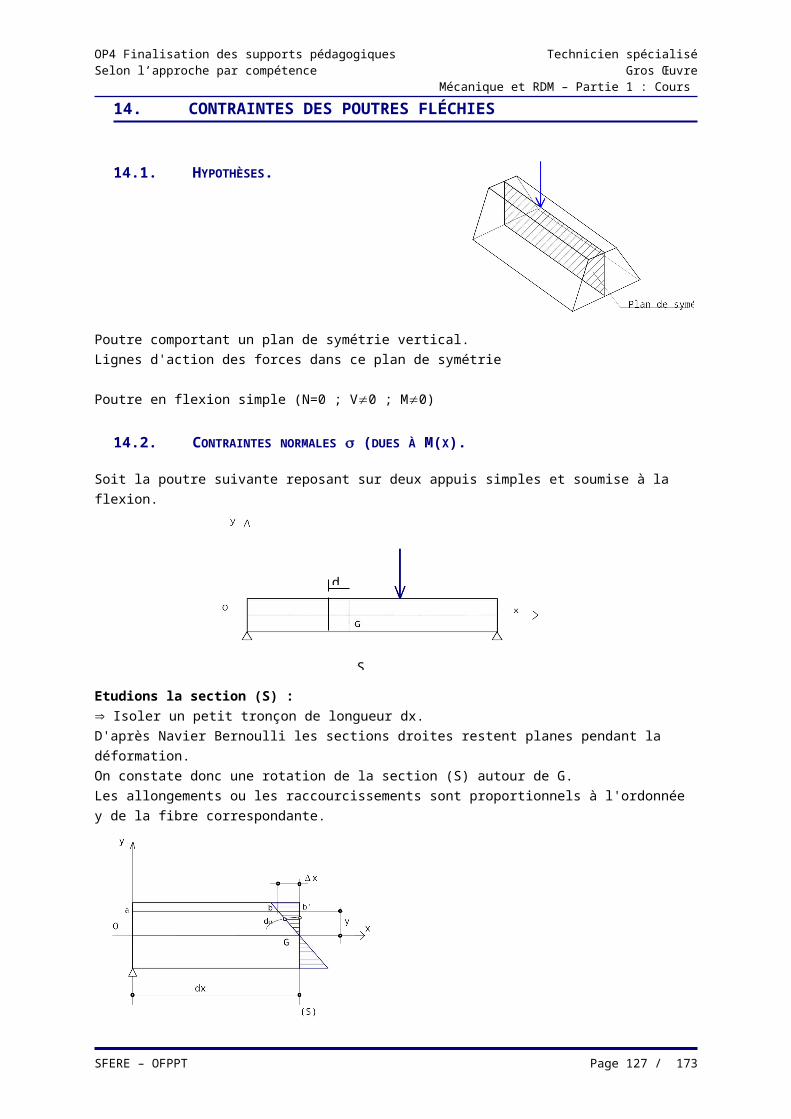
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Conclusion
Quelle que soit la position des aciers pour une poutre bi-encastrée, la section d’acier nécessaire est la
même et correspond à la section obtenue pour une poutre iso.
Il suffira donc de répartir cette section Ao (légèrement majorée par sécurité) dans la poutre de façon à
éviter les fissures.
Avec :
Or A est proportionnelle à M
Avec une sécurité
17.2.3. Détermination des moments en travées et sur appuis
Annexes E page 231
Notation des moments en valeurs absolues
Mw: moment de flexion sur l'appui de gauche (à l'Ouest)
Me: moment de flexion sur l'appui de droite (à Est)
Mt: moment de flexion maximal dans la travée
Mo: moment de flexion maximal dans la travée iso associée
Mo = pour une charge uniformément répartie
Les valeurs de Mt, Mw, et Me doivent vérifier les conditions suivantes :
QB : charge d'exploitation non pondérée
G : charge permanente non pondérée
pour une travée intermédiaire
pour une travée de rive
SFERE – OFPPT Page 127 / 137
Aw Ae
At

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Les moments sur appuis intermédiaires ne sont pas inférieurs à:
-pour une poutre à deux travées
. -pour une poutre à plus de deux travées
De part et d’autre de chaque appui intermédiaire, on retient la plus grande valeur des moments sur
appuis (gauche ou droite).
17.2.4. Evaluation des efforts tranchants
- Soit en calculant les efforts tranchants en tenant compte des moments sur appuis.
- Soit en appliquant une pondération forfaitaire.
SFERE – OFPPT Page 128 / 137

OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
17.2.5. Longueur des chapeaux et arrêts des barres inférieures du second lit.
Annexe E.l,3 page 232Cas général: on trace les courbes enveloppes et l'on détermine l'épure d'arrêt des barres ( décalage
de 0,9 d + longueur d'ancrage ).
Toutefois si QB G et si les charges sont uniformément réparties on peut adopter la disposition
suivante :
. avec L' = Max si travée de rive
L' = Max - si travée intermédiaire
L " = Max ( Ls : longueur de scellement
17.3. MÉTHODE CAQUOT
17.3.1. Domaine d'application. art B.6.2,220
S'applique aux poutres, poutrelles, associées à des planchers de constructions industrielles, c'est à
dire à charges d'exploitation relativement élevées.
QB > 2G
ou
QB > 5 kN/m2
17.3.2. Principe de la méthode. artB.6.2,221
Méthode de continuité simplifiée due à Albert CAQUOT :
Cette méthode est dérivée du théorème des trois moments, mais avec certains ajustements,
propre aux poutres en B.A .(cf : Généralités)
Elle permet donc de déterminer les moments sur chaque appui, en ne considérant, notamment, que
les deux travées adjacentes et leur chargement.
SFERE – OFPPT Page 129 / 137
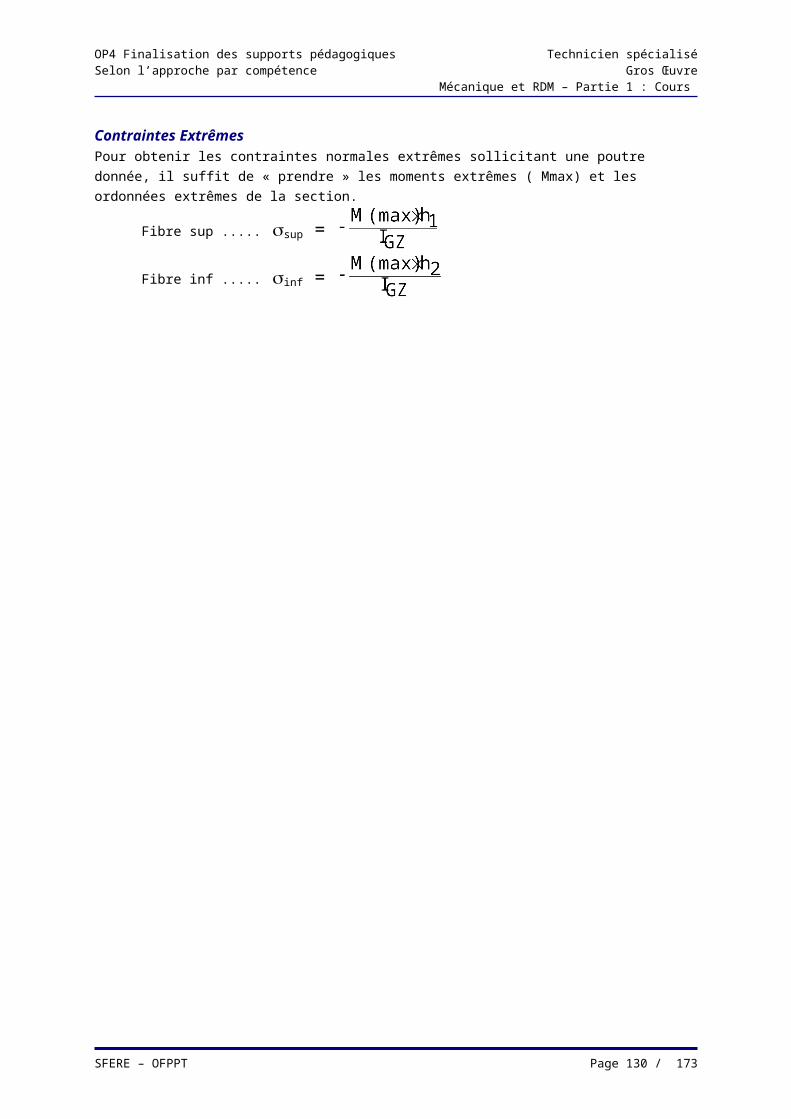
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
17.3.3. Méthode Caquot.
Annexe E2
Appliquée poutres à moments d'inertie égaux dans les différentes travées et non solidaires des poteaux. Annexe E2,2
Moment sur appui
Moment sur appui A pour des charges uniformément réparties. (l = Cte )
I= Cte
avec L' = L si c'est une travée de rive
avec L' = 0,8 L dans les autres cas.
Moment sur appui A pour des charges ponctuelles. ( l = Cte )
Kw et Ke sont lus sur un tableau pour une valeur de -et -voir BAEL Annexe E.2.2, 1
Kw et Ke sont lus dans un tableau pour une valeur de et voir BAEL Annexe E.2.2,1
SFERE – OFPPT Page 130 / 137
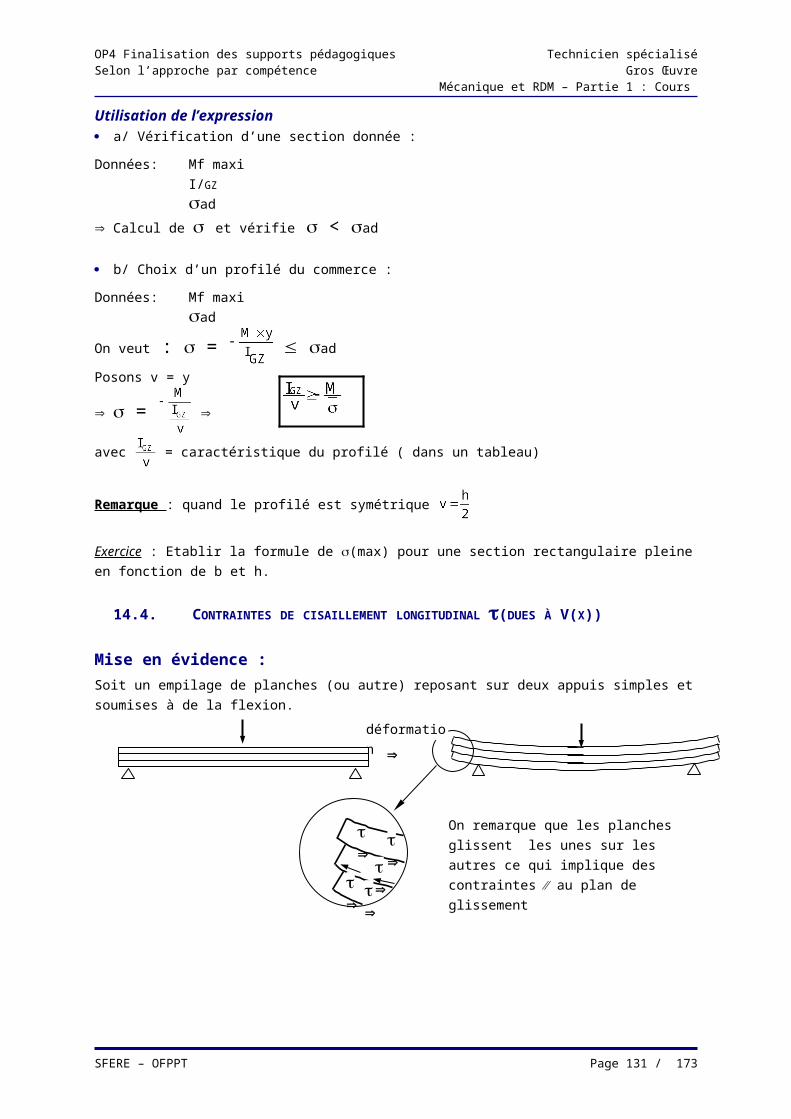
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
17.3.4. Courbes enveloppes des M(x) art B.6.2,3 et art B.6.1,21
A Cas de charge
Pour construire la courbe enveloppe des moments ou même déterminer les moments extrêmes, il est
nécessaire de considérer 3 cas de charge différents :
Cas 1
Moments maxis sur appui.
Section des aciers sur appuis
Cas 2
Moments maxis pour les travées impaires.
Section des aciers dans les travées impaires.
Moments maxis pour les travées paires.
Section des aciers dans les travées paires.
Cas 3
Moments maxis pour les travées impaires
Longueurs des chapeaux dans les travées paires
Moments maxis pour les travées paires
Longueurs des chapeaux dans les travées impaires
SFERE – OFPPT Page 131 / 137
1.35g +1.5q
1.35g +1.5q(travées impaires)
1.35g +1.5q(travées paires)
g +1.5 q(travées impaires)
g +1.5q(travées paires)
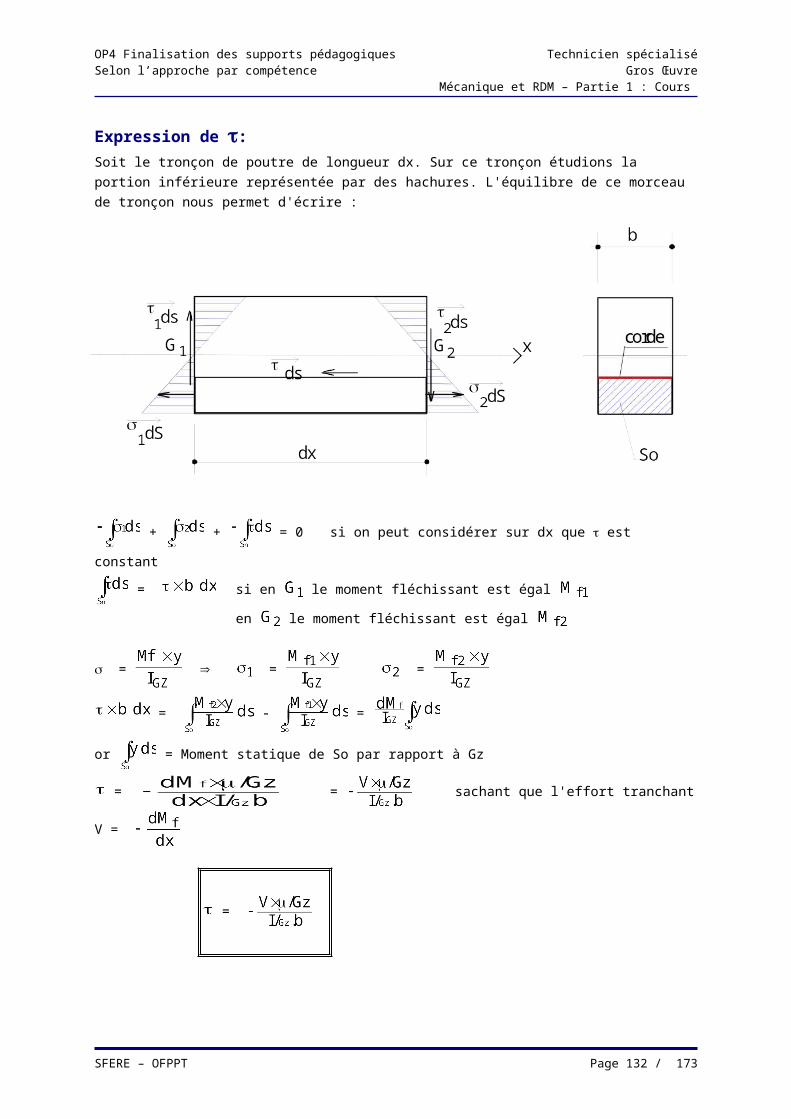
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
B Résultat
C Tracé d’une courbe enveloppe
On peut envisager deux Méthodes
Méthode théorique (équation de M(x) et calculette )
M(x) =-(Mw-RA.x + p.x2/2) Avec RA = pL/2 -
M(x) =
M(x) = (équation à rentrer dans la calculette)
Les Moments ont un signe.
Méthode graphique’
L’étude d’une travée d’une poutre continue peut se décomposer en 2 cas de base :
Moment sur appuis seuls
Chargement iso
SFERE – OFPPT Page 132 / 137
Cas 3
Cas 2
Cas 1
0.8h0.8h
0.8h0.8h
Courbe enveloppe décalée de 0.8h
p
Mw Me
!
Mt = +
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Tracer sur la travée considérée la ligne de fermeture à partir des moments sur appui
puis le moment iso seul et enfin faire l’addition des deux diagrammes
Remarque : pour tracer la parabole correspondant au cas iso d’une charge uniformément répartie, il
suffit de calculer les valeurs des moments tous les 0.1L
Or M(x) = pl/2.x-px2/2
M(0.1L) = =0.36Mo
M(0.2L)= 0.64Mo
M(0.3L)= 0.84Mo
M(0.4L)= 0.96Mo
SFERE – OFPPT Page 133 / 137
Ligne de fermeture
M2M1
Cas d’une charge uniformément répartie Cas d’une charge ponctuelle
M2M1
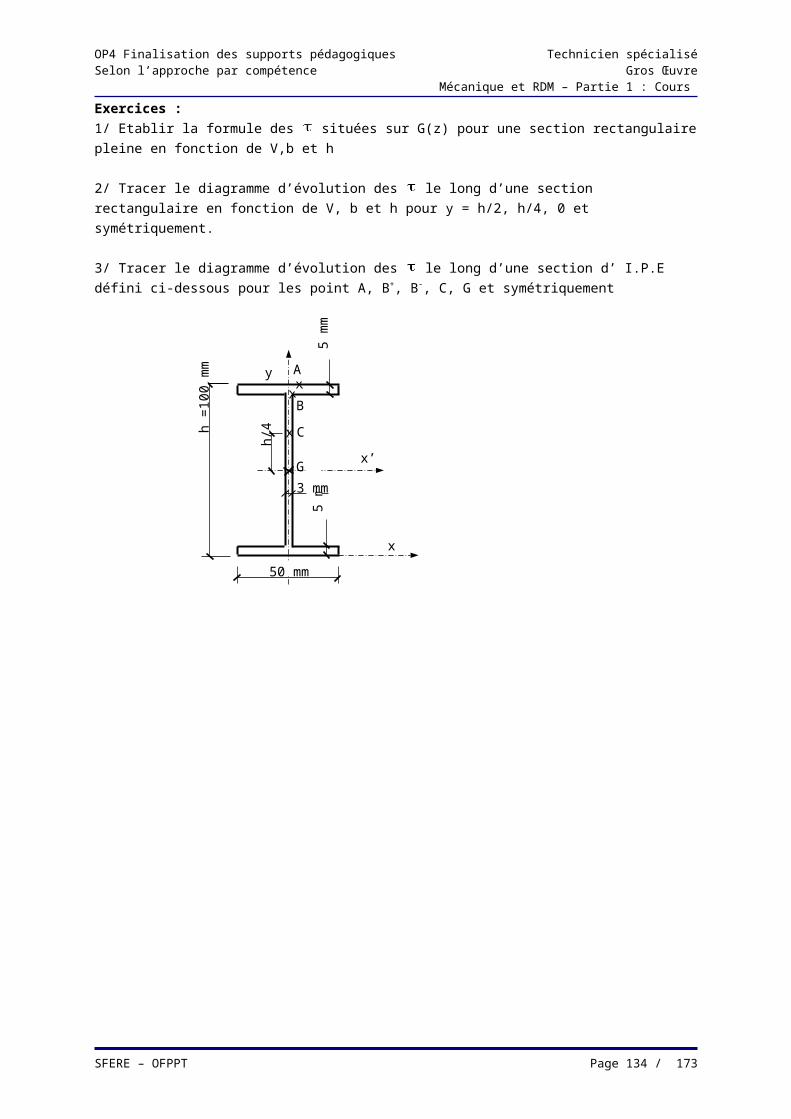
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
D Détermination de Mmax
Précis
Or M(x) =-(Mw-RA.x + p.x2/2)
Et M est maxi quand V(x) =0
Or V(x) =-RA +px/2 Avec RA = pL/2 - signe des moments
X(o) = (valeur à rentrer dans l’expression de M(x))
17.3.5. Calcul de Vu max (Effort Tranchant) Annexe E.2.2,3
A Expression de V
Les efforts tranchants d'appui sont calculés par la méthode générale aux poutres continues en faisant
état des moments de continuité.
Isolons une travée d’une poutre continue
V(A-B) = -RA
V(A-B) = -(RAiso + - )
V(A-B) = -RAiso -
V(B-A) = RB
V(B-A) = RAiso -
Formule générale V(x) = Viso -
avec Viso effort tranchant de la poutre isostatique
B Cas à considérer
Pour obtenir l’effort tranchant sur chaque appui il suffit de charger au maximum les travées
adjacentes à celui-ci :
Appui de rive
SFERE – OFPPT Page 134 / 137
!
p
M2 M3
A B
A B
p
M3
A B
M2
A B
1.35g +1.5q(travées de rive)
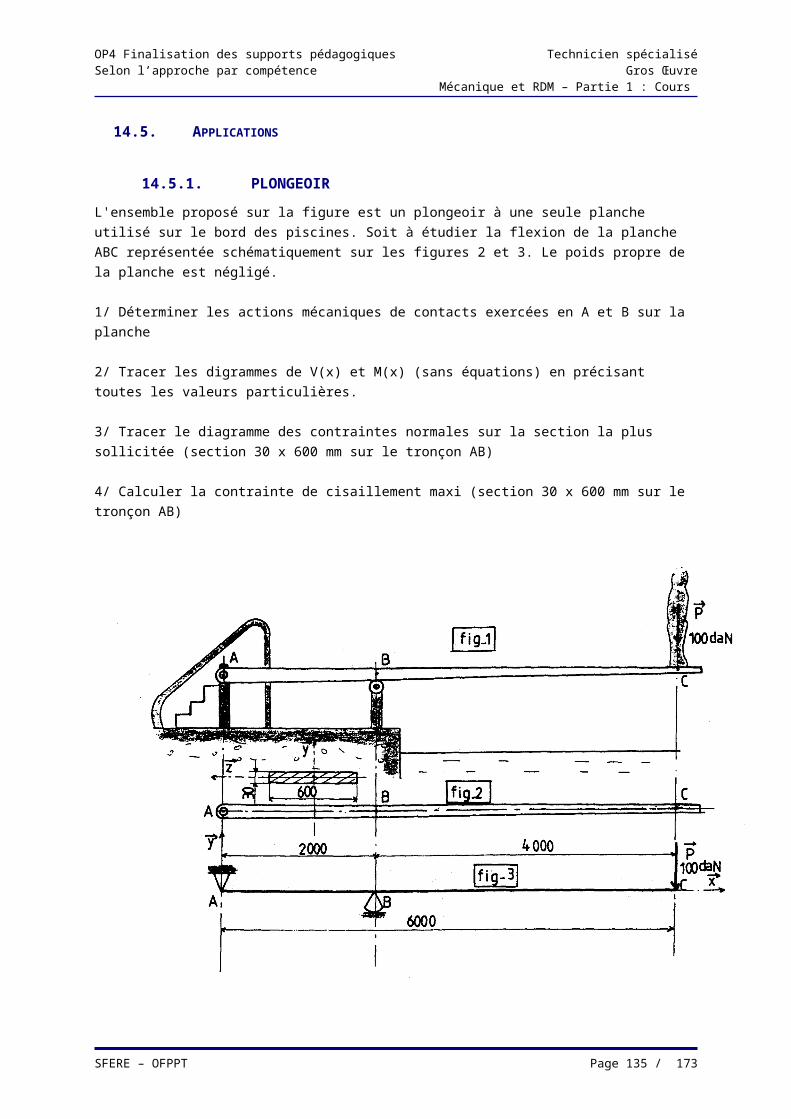
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
SFERE – OFPPT Page 135 / 137
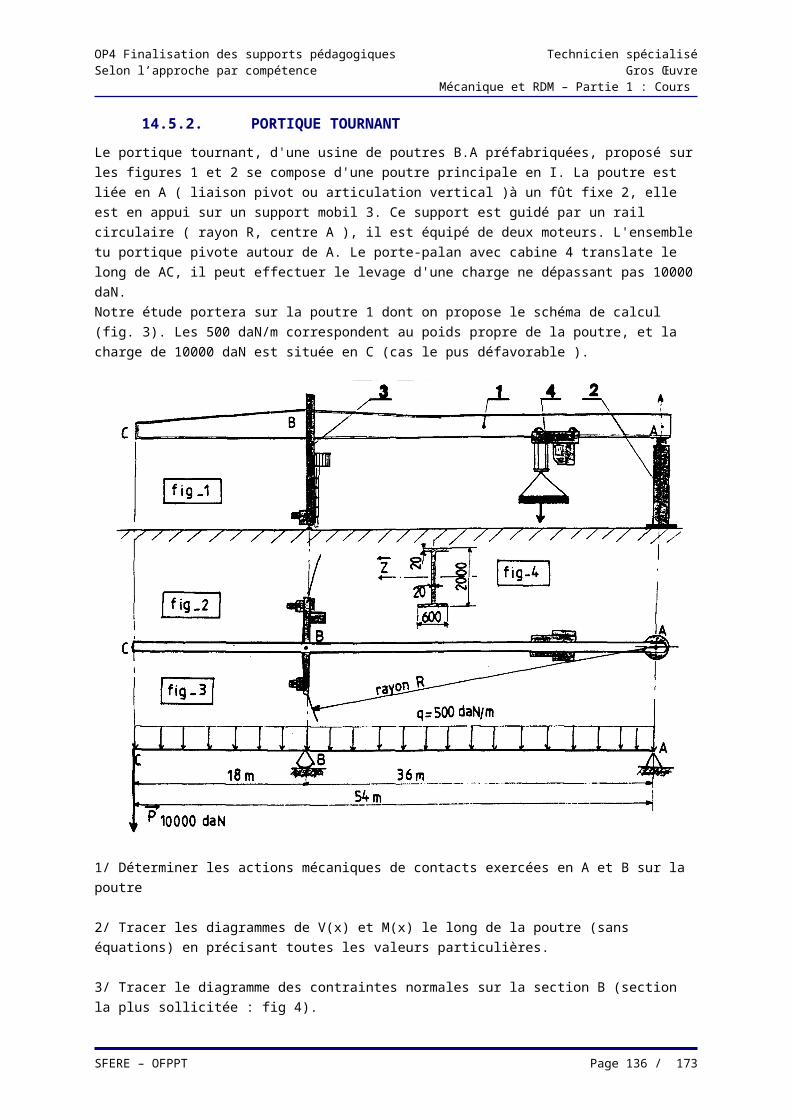
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
Appui intermédiaire
Etc..
17.4. MÉTHODE CAQUOT MINORÉE.
Dans le cas où l'une des trois conditions complémentaires à celle du chargement ne serait pas
satisfaite, on doit appliquer la méthode CAQUOT et il est admissible de minorer les moments sur
appuis dus aux seules charges permanentes par un coefficient compris entre 1 et 2/3 ; les valeurs des
moments en travée sont majorées en conséquence
17.5. CONTRÔLE DE BETON
Méthode Forfaitaire et méthode Caquot .
17.5.1. DONNEES
Soit la poutre continue définie ci-dessous
La fissuration est jugée peu préjudiciable.
17.5.2. QUESTIONS
I/ Méthode forfaitaire
1/ MtA étant estimé à 0.4 Mo, déterminer tous les moments minimaux réglementaires sur appuis et en
travée en utilisant la méthode forfaitaire.
2/ En déduire l'allure du diagramme de M(x) en précisant les valeurs particulières.
II/ Méthode Caquot
1/ En ne considérant que les cas de charge donnant les moments maximaux en travée, déterminer
ces moments.
2/ Tracer pour ces cas de charge, et de façon précise, le diagramme de M(x) pour les travées AB et
CD.
17.6. DIAPORAMA
Voir dans la partie « ANNEXES » de ce document.
SFERE – OFPPT Page 136 / 137
1.35g +1.5q : de part et d’autre de l’appui considéré
OP4 Finalisation des supports pédagogiques Technicien spécialiséSelon l’approche par compétence Gros Œuvre
Mécanique et RDM – Partie 1 : Cours
2 - : ANNEXES
SFERE – OFPPT Page 137 / 137
Top Related