







Languages
Pages
Legal


Poglavje 7
Industrijski robot ABB IRB 1600-7/145
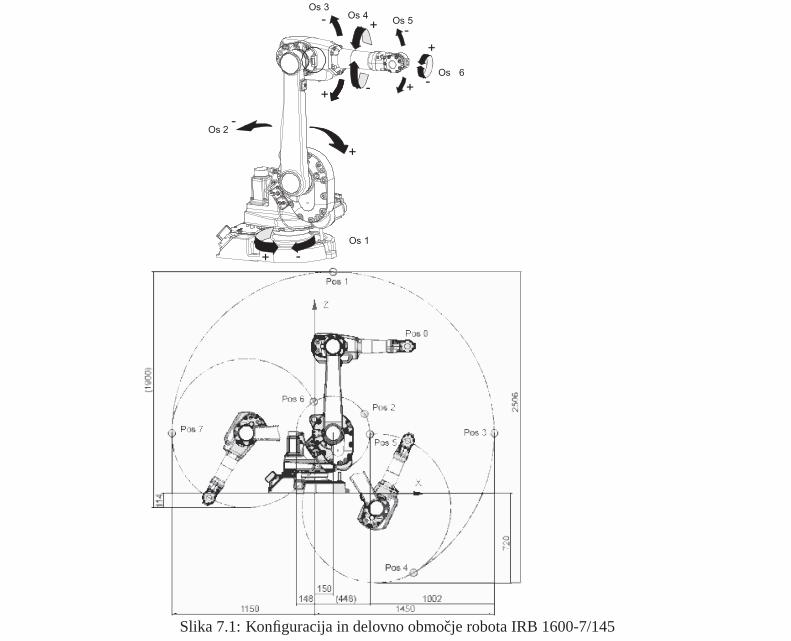
Industrijski robot ABB IRB 1600-7/145 je robot s šestimi prostostnimi stopnjami gibanja antropo-morfne konfiguracije. Robot je namenjen izvajanju razlicnih operacij v industrijskem okolju, kot sonpr. manipulacija objektov, varjenje, lakiranje ali nanašanje lepila. Sposoben je prenašati breme 7kg.
Tip ABB IRB 1600-7/145Horizontalni Doseg 1.45mNosilnost nominalna/maksimalna 7/10 kgPonovljivost pozicioniranja ±0.05mmMaksimalna hitrost Os 1 1800/s
Os 2 180 0/sOs 3 180 0/sOs 4 320 0/sOs 5 400 0/sOs 6 460 0/s
Delovni prostor Os 1 +180/ − 180 0
Os 2 +150/ − 90 0
Os 3 +65/ − 245 0
Os 4 +200/ − 200 0
Os 5 +115/ − 115 0
Os 6 +400/ − 400 0
Teža 250 kgI/O linije 28 elektricnih, (10 napajalnih) , 2 pnevmatskiZavore vseh šest osiDelovni pogoji temperatura 5 − 45oC
vlažnost max95 % RH brez kondensavibracije manj kot4.5 m/s2 (0.5G)
79
80 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
-
+
+
+
+
+
+
-
-
-
-
-
Os 3Os 4
Os 5
Os 6
Os 2
Os 1
Slika 7.1: Konfiguracija in delovno obmocje robota IRB 1600-7/145
7.1 ROBOTSKI KRMILNIK IRC5 81
7.1 Robotski krmilnik IRC5
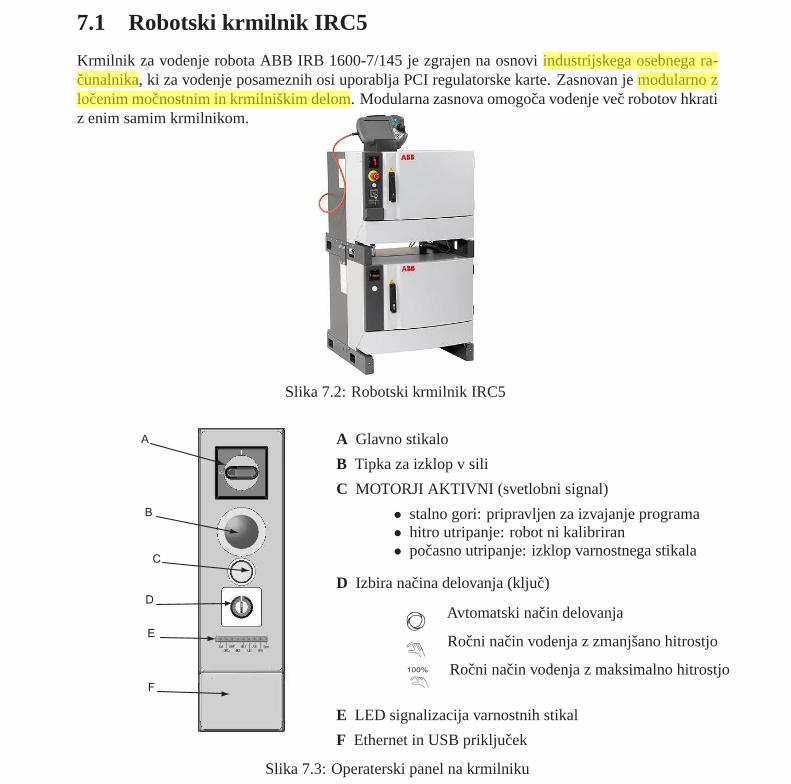
Krmilnik za vodenje robota ABB IRB 1600-7/145 je zgrajen na osnovi industrijskega osebnega ra-cunalnika, ki za vodenje posameznih osi uporablja PCI regulatorske karte. Zasnovan je modularno zlocenim mocnostnim in krmilniškim delom. Modularna zasnova omogoca vodenje vec robotov hkratiz enim samim krmilnikom.
Slika 7.2: Robotski krmilnik IRC5
A
B
C
D
E
F
A Glavno stikalo
B Tipka za izklop v sili
C MOTORJI AKTIVNI (svetlobni signal)
• stalno gori: pripravljen za izvajanje programa• hitro utripanje: robot ni kalibriran• pocasno utripanje: izklop varnostnega stikala
D Izbira nacina delovanja (kljuc)
100%
Avtomatski nacin delovanja
Rocni nacin vodenja z zmanjšano hitrostjo
Rocni nacin vodenja z maksimalno hitrostjo
E LED signalizacija varnostnih stikal
F Ethernet in USB prikljucek
Slika 7.3: Operaterski panel na krmilniku

82 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
7.2 Rocna ucna napravaFlexPendant
Kot uporabniški vmesnik za rocno vodenje robota, ucenje tock in razvoj robotskega programa služirocna ucna naprava imenovanaFlexPendant. Napravo odlikuje zaslon obcutljiv na dotik ter krmilnapalica s tremi prostostnimi stopnjami gibanja.
BG C
EH
A Konektor
B Zaslon obcutljiv na dotik (ang. Touch Screen)
C Tipka za izklop v sili
D Omogocitvena tipka (stisk do polovice!)
E Krmilna palica za rocno vodenje
F “Hold-to-Run” gumba
G Uporabniško programabilne tipke
H Tipke za testno izvajanje programa: START,KORAK NAPREJ, KORAK NAZAJ, STOP
Slika 7.4: Rocna ucna napravaFlexPendant
7.2 ROCNA UCNA NAPRAVA FLEXPENDANT 83
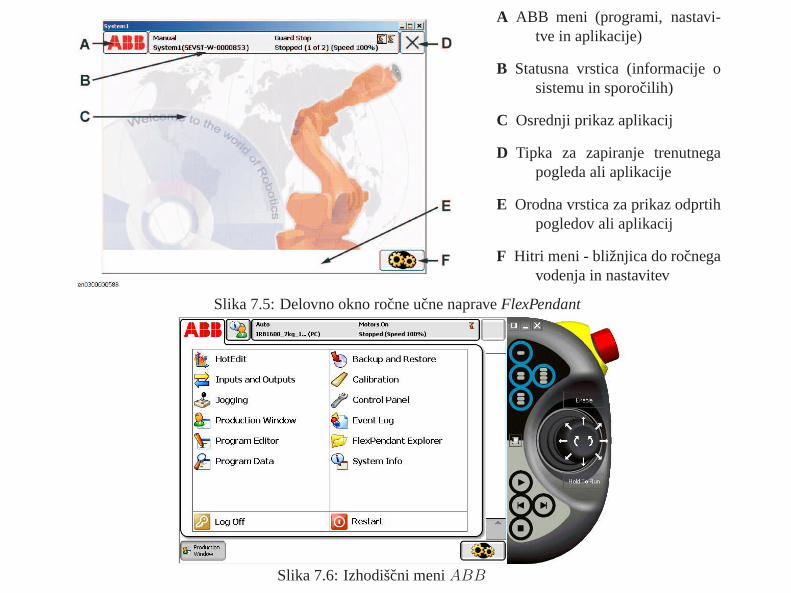
A ABB meni (programi, nastavi-tve in aplikacije)
B Statusna vrstica (informacije osistemu in sporocilih)
C Osrednji prikaz aplikacij
D Tipka za zapiranje trenutnegapogleda ali aplikacije
E Orodna vrstica za prikaz odprtihpogledov ali aplikacij
F Hitri meni - bližnjica do rocnegavodenja in nastavitev
Slika 7.5: Delovno okno rocne ucne napraveFlexPendant
Slika 7.6: Izhodišcni meniABB

84 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
7.3 Rocno vodenje robota
Rocno vodenje je nacin vodenjarobota s pomocjo krmilne palice. Robot lahko rocno vodimo glede napoložaje sklepov ali glede na razlicne koordinatne sisteme. Izbrano delovanje gibanja in/ali koordina-tnega sistema doloca nacin premikanja robota. V linearnem nacinu gibanja se tocka središca orodja(TCP - tool center point) premika po ravnicrti v prostoru, oz. v smeri osi izbranega koordinatnegasistema. V nacinu gibanja “os-za-osjo” pa se premika dolocena os robota. Ker ima krmilna palicatri prostostne stopnje gibanja, lahko naenkrat spreminjamo pozicijo le treh koordinat.V oknu za rocno vodenje (ang. Jogging), do katerega dostopamo preko glavnega menijaABB,so prikazani parametri rocnega vodenja:
A
B
CD
E
F
G
H
I
J
K
L
A Izbrana enota - robot
B Popolna natancnost
C Izbran nacin gibanja
D Izbran koordinatni sistem
E Izbrano orodje
F Izbran “work-object”
G Izbrano breme
H Izbrana zapora usmerjanja krmilnepalice
I Izbira inkrementov premika
J Izpis pozicij posameznih osi
K Format izpisa pozicij
L Prikaz smeri krmilne palice
Slika 7.7: Meni za rocno vodenjeJogging
7.3 ROCNO VODENJE ROBOTA 85
A B C D
E F G H
1
2
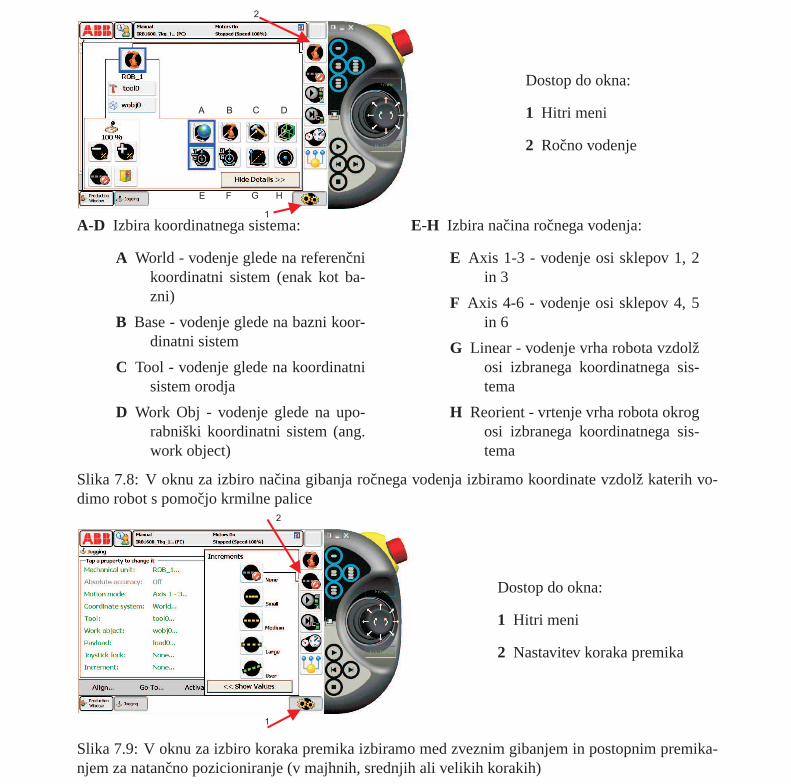
Dostopdo okna:
1 Hitri meni
2 Rocno vodenje
A-D Izbira koordinatnega sistema:
A World - vodenje glede na referencnikoordinatni sistem (enak kot ba-zni)
B Base - vodenje glede na bazni koor-dinatni sistem
C Tool - vodenje glede na koordinatnisistem orodja
D Work Obj - vodenje glede na upo-rabniški koordinatni sistem (ang.work object)
E-H Izbira nacina rocnega vodenja:
E Axis 1-3 - vodenje osi sklepov 1, 2in 3
F Axis 4-6 - vodenje osi sklepov 4, 5in 6
G Linear - vodenje vrha robota vzdolžosi izbranega koordinatnega sis-tema
H Reorient - vrtenje vrha robota okrogosi izbranega koordinatnega sis-tema
Slika 7.8: V oknu za izbiro nacina gibanja rocnega vodenja izbiramo koordinate vzdolž katerih vo-dimo robot s pomocjo krmilne palice
1
2
Dostop do okna:
1 Hitri meni
2 Nastavitev koraka premika
Slika 7.9: V oknu za izbiro koraka premika izbiramo med zveznim gibanjem in postopnim premika-njem za natancno pozicioniranje (v majhnih, srednjih ali velikih korakih)

86 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
7.4 Kalibracija orodja
Orodje je objekt, ki ga namestimo na vrh robota. Orodje je potrebnodefinirati s tocko TCP (ToolCenter Point), ki podaja lego vrha orodja glede na zadnji segment robota. Koordinatni sistem orodjaje definiran glede na pozicijo, orientacijo in geometrijo orodja. Gibanje glede na koordinatni sistemorodja uporabljamo kadar robot izvaja operacije navijanja, vrtanja ali gibanja po krožnici.
Slika 7.10: Koordinatni sistem na vrhu orodja
7.4.1 Kreiranje orodja
korak 1 Dostop:ABB>Jogging>Tool>New
korak 2 Name: izberi ime orodja
korak 3 Scope: doseg naj bo globalni(za vse module)
korak 4 Storage type: izberi persistent
korak 5 ostalo nespremenjeno
Slika 7.11: Kreiranje orodja

7.4 KALIBRACIJA ORODJA 87
7.4.2 Nastavljanje parametrov orodja
korak 1 Dostop:ABB>Jogging>Tool>Edit>ChangeDeclaration
korak 2 Nastavite maso orodja na 1kg
Slika 7.12: Spreminjanje parametrov orodja
7.4.3 Definiranje orientacije orodjakorak 1 Dostop:
ABB>Jogging>Tool>Edit>Define
korak 2 Izberite želeno metodo:TCP & Z
korak 3 Izberite število približevalnihtock: 4
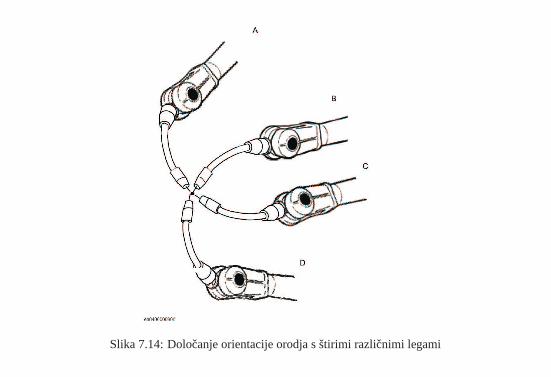
korak 4 Rocno vodite robot v isto pozi-cijo s štirimi razlicnimi orientaci-jami (glej sliko 7.17). Vsako potr-dite zModify Position.
korak 5 Rocno dolocite tocko Elonga-tor Point Z, ki doloca smerz osi.Potrdite zModify Position.
korak 6 Dolocitev orientacije zaklju-cite s potrditvijoOK
Slika 7.13: Dolocanje orientacije orodja
88 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
Slika 7.14: Dolocanje orientacije orodja s štirimi razlicnimi legami
7.5 UPORABNIŠKI KOORDINATNI SISTEM - “WORK OBJECT” 89
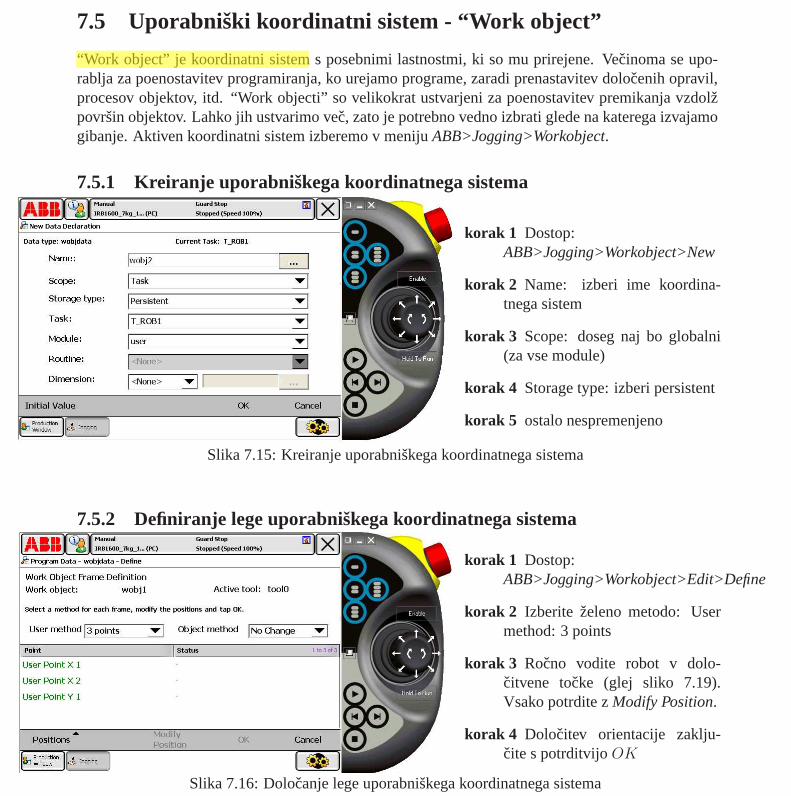
7.5 Uporabniški koordinatni sistem - “Work object”
“Work object” je koordinatni sistem s posebnimi lastnostmi,ki so mu prirejene. Vecinoma se upo-rablja za poenostavitev programiranja, ko urejamo programe, zaradi prenastavitev dolocenih opravil,procesov objektov, itd. “Work objecti” so velikokrat ustvarjeni za poenostavitev premikanja vzdolžpovršin objektov. Lahko jih ustvarimo vec, zato je potrebno vedno izbrati glede na katerega izvajamogibanje. Aktiven koordinatni sistem izberemo v menijuABB>Jogging>Workobject.
7.5.1 Kreiranje uporabniškega koordinatnega sistema
korak 1 Dostop:ABB>Jogging>Workobject>New
korak 2 Name: izberi ime koordina-tnega sistem
korak 3 Scope: doseg naj bo globalni(za vse module)
korak 4 Storage type: izberi persistent
korak 5 ostalo nespremenjeno
Slika 7.15: Kreiranje uporabniškega koordinatnega sistema
7.5.2 Definiranje lege uporabniškega koordinatnega sistema
korak 1 Dostop:ABB>Jogging>Workobject>Edit>Define
korak 2 Izberite želeno metodo: Usermethod: 3 points
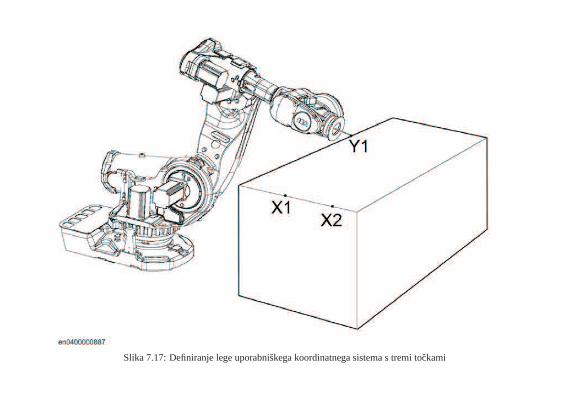
korak 3 Rocno vodite robot v dolo-citvene tocke (glej sliko 7.19).Vsako potrdite zModify Position.
korak 4 Dolocitev orientacije zaklju-cite s potrditvijoOK
Slika 7.16: Dolocanje lege uporabniškega koordinatnega sistema
90 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
Slika 7.17: Definiranje lege uporabniškega koordinatnega sistema s tremi tockami

7.6 PROGRAMSKI UREJEVALNIK - “PROGRAM EDITOR” 91
7.6 Programski urejevalnik - “Program editor”Dostop: ABB > Program Editor > Ta-
sks and Programs > File
Kreiranje programa File > New Pro-gram
Nalaganje programa File > Load Pro-gram
Shranjevanje programa File > SaveProgram As
Preimenovanje programa File > Re-name Program
Brisanje programa File > Delete Pro-gram
7.6.1 Vrivanje ukazov
Dostop: ABB > Program Editor > Ta-sks and Programs > Add Instruc-tion
Nabor ukazov izbiranje pod opcijoCommon
Vrivanje ukaza izbira ikonce ukaza
7.6.2 Osnovni ukazi za gibanje
Za programsko vodenje uporabljamo tri osnovne ukaze z razlicno interpolacijo. UkazMoveJje ukazpri katerem je izvršen gib v koncno tocko glede na interpolacijo v koordinatah posameznih sklepov.UkazMoveLizvrši premik v koncno tocko po premici. UkazMoveCpa izvrši premik v koncno tockopreko vmesne tocke po krožnici.

92 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
MoveJ p10, v1000, z50, tool0;
Končna točka
Začetna točkap10
MoveL p10, v1000, z50, tool0;
Začetna točka Končna točkap10
MoveC p5, p10, v1000, z50, tool0;
Začetna točka
Končna točka
Točka na krožnici
p10
p5
Slika 7.20: Osnovni nacini gibanja: a) gibanje v koordinatah sklepov, b) gibanje po premici in c)gibanje po krožnici
7.6 PROGRAMSKI UREJEVALNIK - “PROGRAM EDITOR” 93
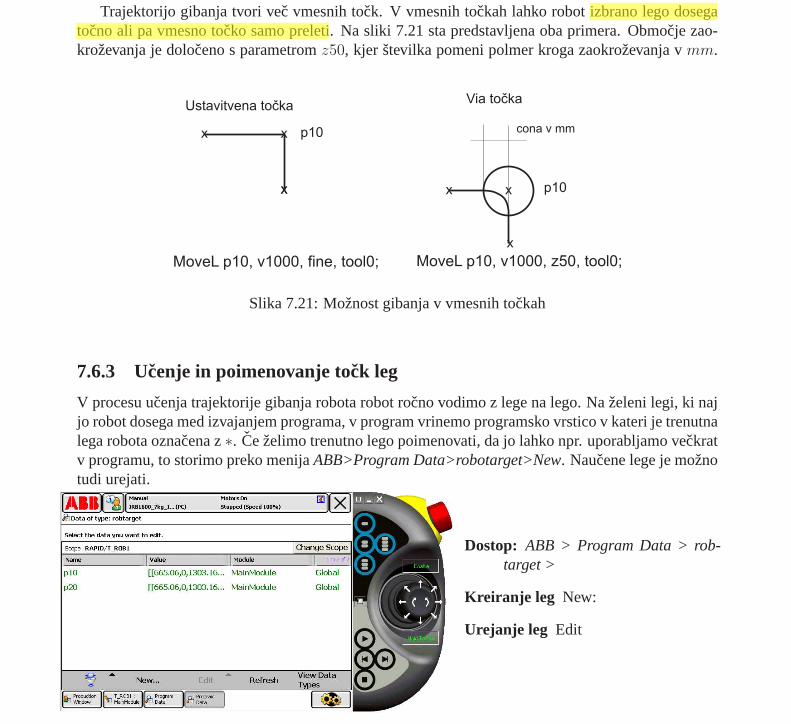
Trajektorijo gibanja tvori vec vmesnih tock. V vmesnih tockah lahko robot izbrano lego dosegatocno ali pa vmesno tocko samo preleti. Na sliki 7.21 sta predstavljena oba primera. Obmocje zao-kroževanja je doloceno s parametromz50, kjer številka pomeni polmer kroga zaokroževanja vmm.
x x
xx x
x
x
Ustavitvena čkatoVia točka
cona v mm
MoveL p10, v1000, fine, tool0;
p10
p10
MoveL p10, v1000, z50, tool0;
Slika 7.21: Možnost gibanja v vmesnih tockah
7.6.3 Ucenje in poimenovanje tock leg
V procesu ucenja trajektorije gibanja robota robot rocno vodimo z lege na lego. Na želeni legi, ki najjo robot dosega med izvajanjem programa, v program vrinemo programsko vrstico v kateri je trenutnalega robota oznacena z∗. Ce želimo trenutno lego poimenovati, da jo lahko npr. uporabljamo veckratv programu, to storimo preko menijaABB>Program Data>robotarget>New. Naucene lege je možnotudi urejati.
Dostop: ABB > Program Data > rob-target >
Kreiranje leg New:
Urejanje leg Edit

94 Poglavje 7. INDUSTRIJSKI ROBOT ABB IRB 1600-7/145
7.6.4 Krmiljenje vhodno/izhodnih linij
Dostop: ABB > Program Editor > AddInstruction >
Vklop digitalnega izhoda Set
Vklop digitalnega izhoda Reset
Slika 7.23: Krmiljenje vhodno/izhodnih linij
7.6.5 Urejanje programskih vrstic
Dostop: ABB > Program Editor > Ta-sks and Programs > Edit
Urejanje vrstic kopiranje, brisanje, ko-mentiranje vrstic
Spreminjanje argumentov ukazaizbiraChange selected
Slika 7.24: Urejanje programskih vrstic
7.6 PROGRAMSKI UREJEVALNIK - “PROGRAM EDITOR” 95
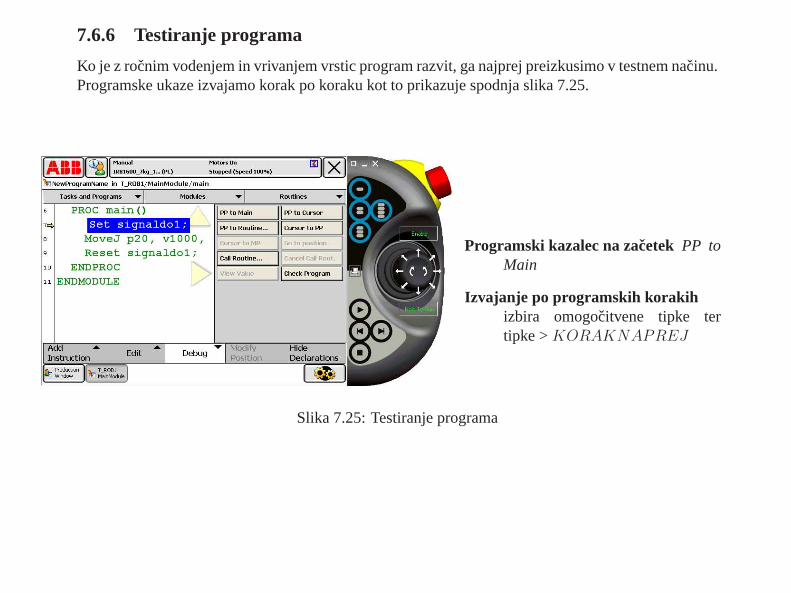
7.6.6 Testiranje programa
Ko je z rocnim vodenjem in vrivanjem vrstic program razvit, ga najprej preizkusimo v testnem nacinu.Programske ukaze izvajamo korak po koraku kot to prikazuje spodnja slika 7.25.
Programski kazalec na zacetek PP toMain
Izvajanje po programskih korakihizbira omogocitvene tipke tertipke >KORAKNAPREJ
Slika 7.25: Testiranje programa
7.8 IZVEDBA NALOGE 97
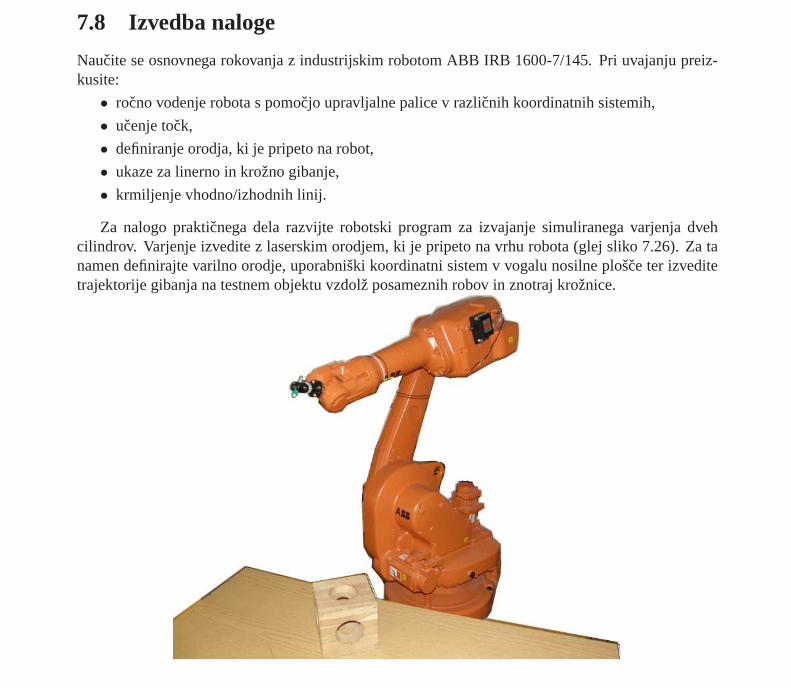
7.8 Izvedba naloge
Naucite se osnovnega rokovanja z industrijskim robotom ABB IRB 1600-7/145. Pri uvajanju preiz-kusite:
• rocno vodenje robota s pomocjo upravljalne palice v razlicnih koordinatnih sistemih,
• ucenje tock,
• definiranje orodja, ki je pripeto na robot,
• ukaze za linerno in krožno gibanje,
• krmiljenje vhodno/izhodnih linij.
Za nalogo prakticnega dela razvijte robotski program za izvajanje simuliranega varjenja dvehcilindrov. Varjenje izvedite z laserskim orodjem, ki je pripeto na vrhu robota (glej sliko 7.26). Za tanamen definirajte varilno orodje, uporabniški koordinatni sistem v vogalu nosilne plošce ter izveditetrajektorije gibanja na testnem objektu vzdolž posameznih robov in znotraj krožnice.
Top Related