






Languages
Pages
Legal

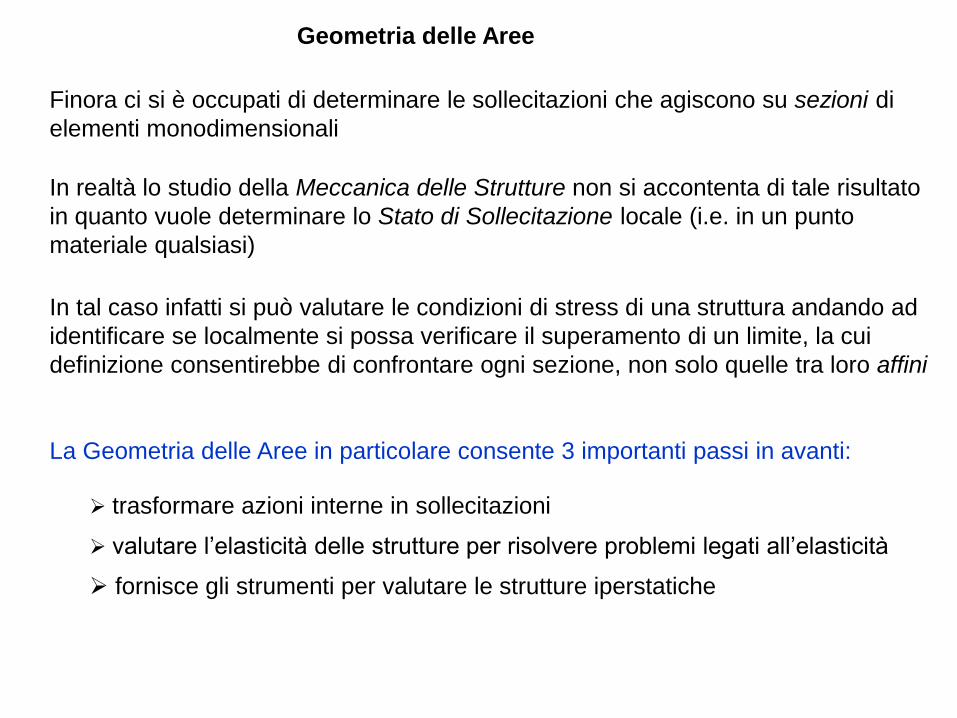
Geometria delle Aree
Finora ci si è occupati di determinare le sollecitazioni che agiscono su sezioni di
elementi monodimensionali
In realtà lo studio della Meccanica delle Strutture non si accontenta di tale risultato
in quanto vuole determinare lo Stato di Sollecitazione locale (i.e. in un punto
materiale qualsiasi)
In tal caso infatti si può valutare le condizioni di stress di una struttura andando ad
identificare se localmente si possa verificare il superamento di un limite, la cui
definizione consentirebbe di confrontare ogni sezione, non solo quelle tra loro affini
La Geometria delle Aree in particolare consente 3 importanti passi in avanti:
trasformare azioni interne in sollecitazioni
valutare l’elasticità delle strutture per risolvere problemi legati all’elasticità
fornisce gli strumenti per valutare le strutture iperstatiche
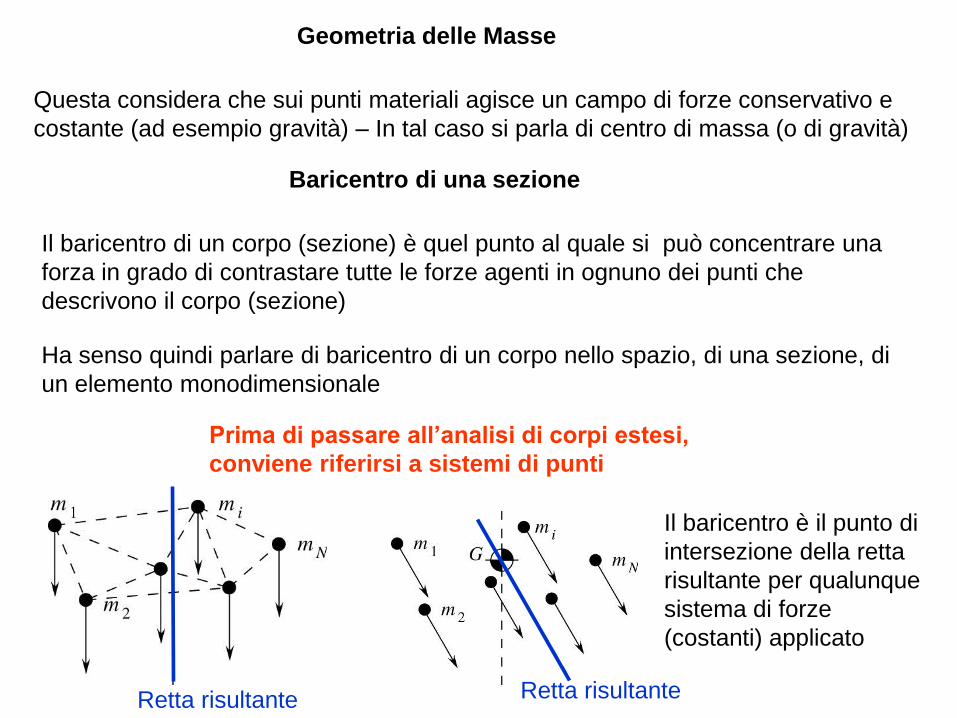
Baricentro di una sezione
Il baricentro di un corpo (sezione) è quel punto al quale si può concentrare una
forza in grado di contrastare tutte le forze agenti in ognuno dei punti che
descrivono il corpo (sezione)
Ha senso quindi parlare di baricentro di un corpo nello spazio, di una sezione, di
un elemento monodimensionale
Geometria delle Masse
Questa considera che sui punti materiali agisce un campo di forze conservativo e
costante (ad esempio gravità) – In tal caso si parla di centro di massa (o di gravità)
Prima di passare all’analisi di corpi estesi,
conviene riferirsi a sistemi di punti
Retta risultante Retta risultante
Il baricentro è il punto di
intersezione della retta
risultante per qualunque
sistema di forze
(costanti) applicato

Introdotto un sistema di riferimento cartesiano, il centro di massa risulta dal
calcolo della risultante delle forze – Somma pesata delle coordinate di ciascun
punto (il peso è la massa associata)
i i i i i ii i iG G G
x m g y m g z m gx y z
mg mg mg
Se le masse associate ad ogni punto sono identiche, il baricentro diviene
una sola proprietà geometrica
1 2 3 1 2 3 1 2 33
3 3 3G G
x x x y y y z z zx y z
Notare che in questo caso il baricentro coincide anche
con il baricentro del triangolo (incrocio mediane)
Se si considera i corpi continui come insieme di infiniti punti materiali, le
sommatorie si trasformano in integrali
V V V
G G G
x dV y dV z dV
x y zm m m
Nel caso di copri omogenei (ρ = cost) V V V
G G G
x dV y dV z dV
x y zV V V
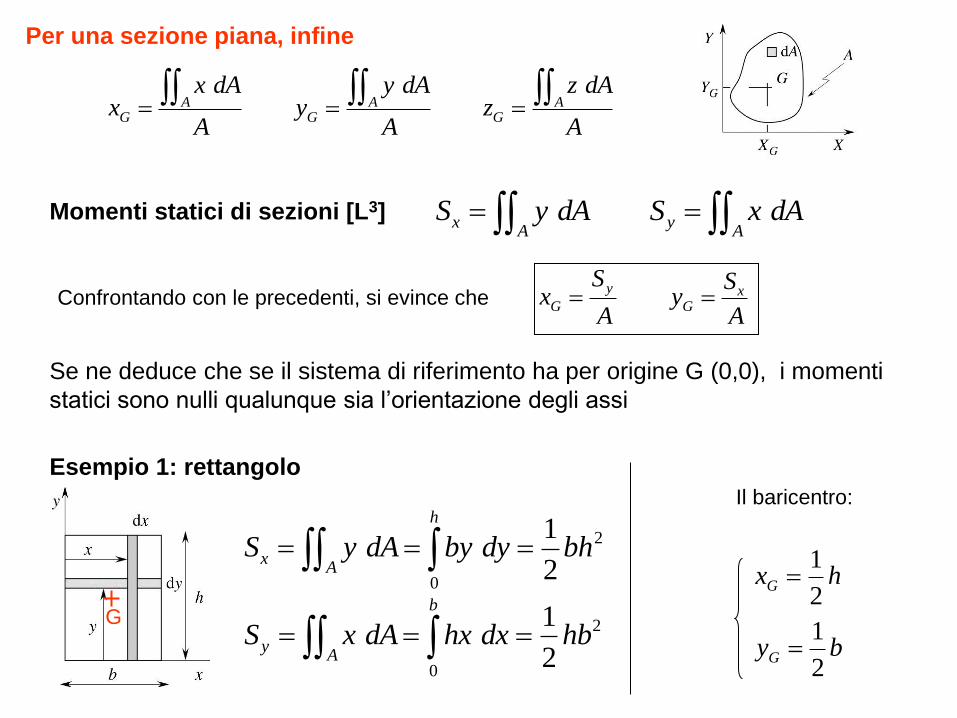
Per una sezione piana, infine
A A A
G G G
x dA y dA z dAx y z
A A A
Momenti statici di sezioni [L3] x yA A
S y dA S x dA
Confrontando con le precedenti, si evince che y x
G G
S Sx y
A A
Se ne deduce che se il sistema di riferimento ha per origine G (0,0), i momenti
statici sono nulli qualunque sia l’orientazione degli assi
Esempio 1: rettangolo
2
0
1
2
h
xA
S y dA by dy bh
2
0
1
2
b
yA
S x dA hx dx hb
Il baricentro:
1
2Gx h
1
2Gy b
G

Esempio 2: triangolo
2
0
1
6
h
xA
h yS y dA y b dy bh
h
Dal teorema di Talete: h y
l y bh
Riferimento appoggiato sulla base b
L’ordinata del baricentro:
Esempio 3: semicerchio ( , ) dA r r d dr
0
0
sin
R
xA
S y dA r r d dr
2 3
00
2cos
3
R
xS r dr R
1
3Gy h
3
2
2 3 1
1 2 3
xG
S Ry R
A R
L’ordinata del baricentro:
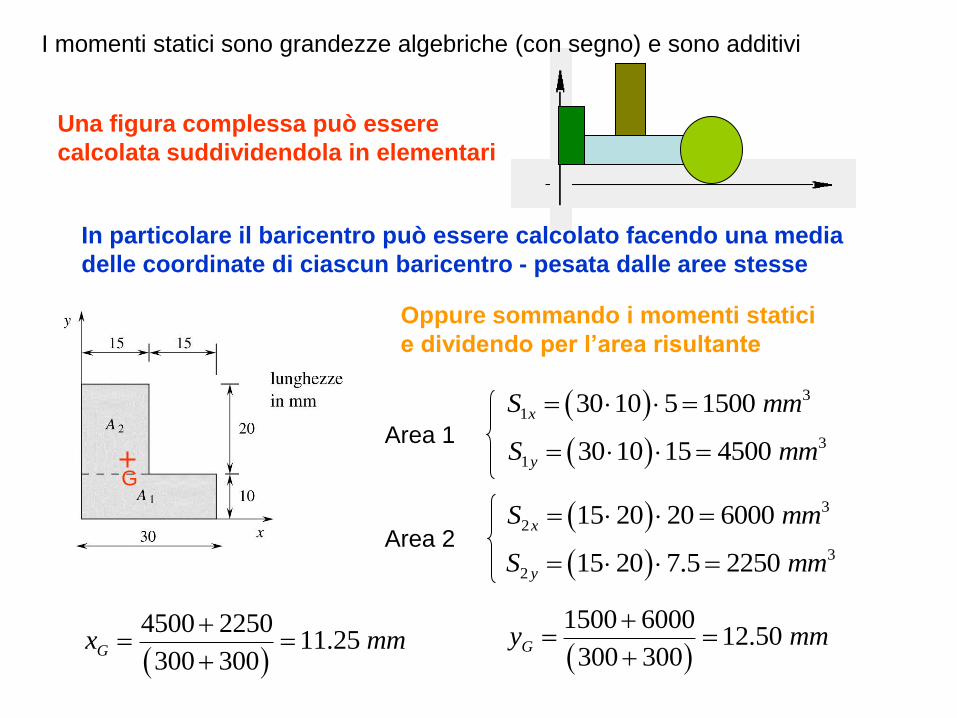
I momenti statici sono grandezze algebriche (con segno) e sono additivi
Una figura complessa può essere
calcolata suddividendola in elementari
In particolare il baricentro può essere calcolato facendo una media
delle coordinate di ciascun baricentro - pesata dalle aree stesse
3
1 30 10 5 1500 xS mm
G 3
1 30 10 15 4500 yS mm
3
2 15 20 20 6000 xS mm
3
2 15 20 7.5 2250 yS mm
Area 1
Area 2
Oppure sommando i momenti statici
e dividendo per l’area risultante
4500 2250
11.25 300 300
Gx mm
1500 600012.50
300 300Gy mm

Momenti d’inerzia di sezioni [L4]
Questi ultimi non sono altro che
momenti statici del II ordine 2 2 x y
A A
J y dA J x dA
I momenti d’inerzia sono
sempre positivi
Anche i momenti di inerzia
godono dell’additività
Si può anche definire un momento del II ordine misto (x-y) mom. centrifugo
xy
A
J xy dA Il momento centrifugo misto ha segno
Può anche essere nullo (ad esempio se anche uno solo
degli assi cartesiani è asse di simmetria)
3
22 2
2
12
h
xh
A
b hJ y dA y bdy
3
22 2
2
12
b
yb
A
h bJ x dA x hdx
2 2
2 2 0
h b
xyh b
A
J xy dA xdx ydy

Momenti d’inerzia polare [L4]
È un momento del II ordine calcolato
utilizzando un sistema di coordinate polari
2 p
A
J r dA
Si calcolare noti i momenti d’inerzia utilizzando la semplice relazione
2 2 2r x y p x yJ J J
Per una sezione rettangolare, ad esempio: 2 21
12pJ bh b h
Per una sezione circolare è più agevole calcolare Jp e poi desumere Jx e Jy
2 4 4
02
2 32
R
pJ r rdr R D
4 4
2 4 64
p
x y
JJ J R D
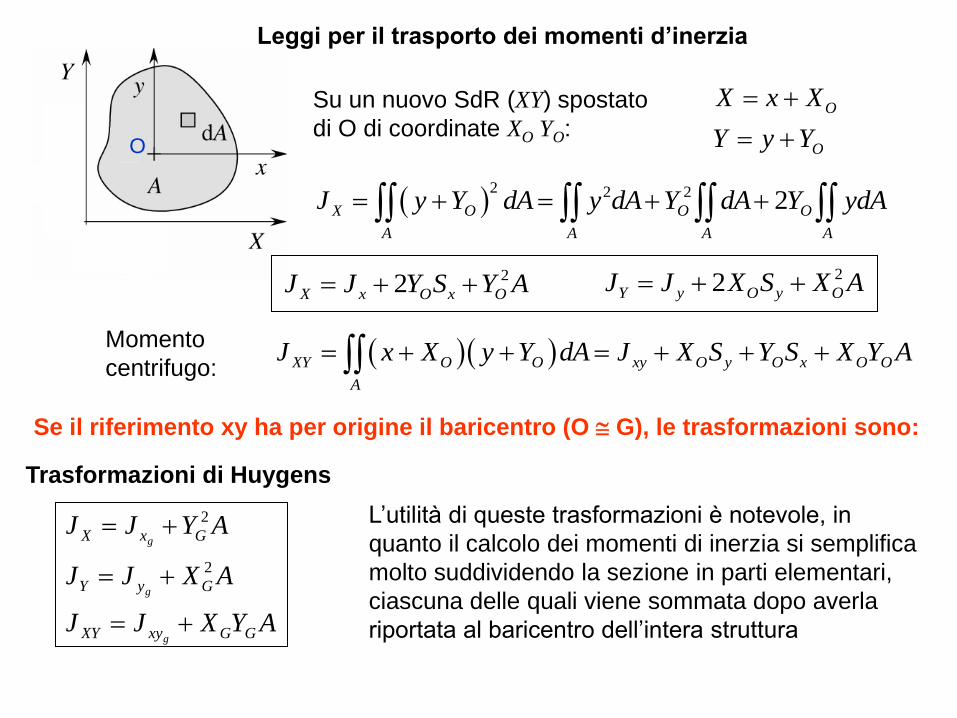
Leggi per il trasporto dei momenti d’inerzia
O
O
O
X x X
Y y Y
Su un nuovo SdR (XY) spostato
di O di coordinate XO YO:
2 2 2 2X O O O
A A A A
J y Y dA y dA Y dA Y ydA
22X x O x OJ J Y S Y A 22Y y O y OJ J X S X A
XY O O xy O y O x O O
A
J x X y Y dA J X S Y S X Y A Momento
centrifugo:
Se il riferimento xy ha per origine il baricentro (O G), le trasformazioni sono:
2
2
g
g
g
X x G
Y y G
XY xy G G
J J Y A
J J X A
J J X Y A
L’utilità di queste trasformazioni è notevole, in
quanto il calcolo dei momenti di inerzia si semplifica
molto suddividendo la sezione in parti elementari,
ciascuna delle quali viene sommata dopo averla
riportata al baricentro dell’intera struttura
Trasformazioni di Huygens
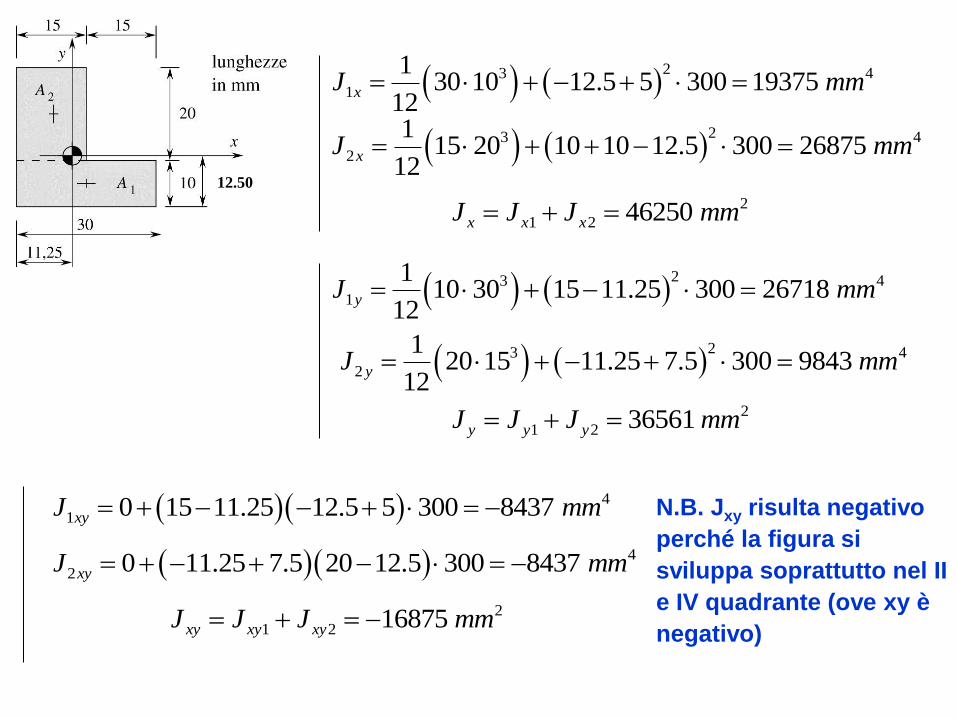
23 4
1
130 10 12.5 5 300 19375
12xJ mm
12.50
23 4
2
115 20 10 10 12.5 300 26875
12xJ mm
2
1 2 46250 x x xJ J J mm
23 4
1
110 30 15 11.25 300 26718
12yJ mm
2
1 2 36561 y y yJ J J mm
23 4
2
120 15 11.25 7.5 300 9843
12yJ mm
4
1 0 15 11.25 12.5 5 300 8437 xyJ mm
4
2 0 11.25 7.5 20 12.5 300 8437 xyJ mm
2
1 2 16875 xy xy xyJ J J mm
N.B. Jxy risulta negativo
perché la figura si
sviluppa soprattutto nel II
e IV quadrante (ove xy è
negativo)
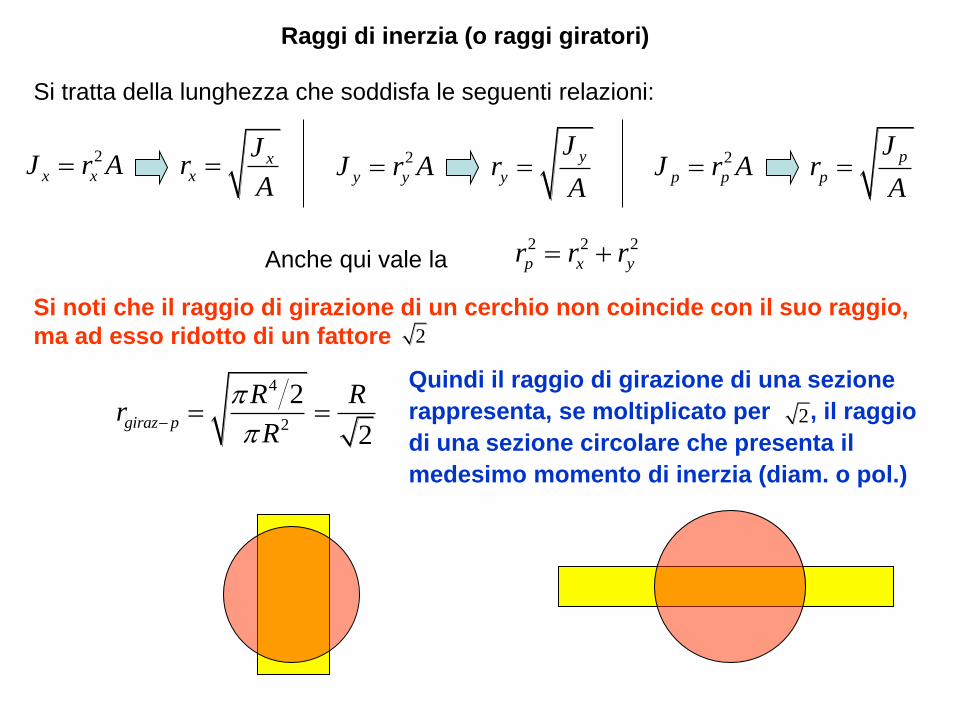
Raggi di inerzia (o raggi giratori)
Si tratta della lunghezza che soddisfa le seguenti relazioni:
2 xx x x
JJ r A r
A 2 y
y y y
JJ r A r
A 2 p
p p p
JJ r A r
A
Anche qui vale la 2 2 2
p x yr r r
Si noti che il raggio di girazione di un cerchio non coincide con il suo raggio,
ma ad esso ridotto di un fattore 2
4
2
2
2giraz p
R Rr
R
Quindi il raggio di girazione di una sezione
rappresenta, se moltiplicato per , il raggio
di una sezione circolare che presenta il
medesimo momento di inerzia (diam. o pol.)
2
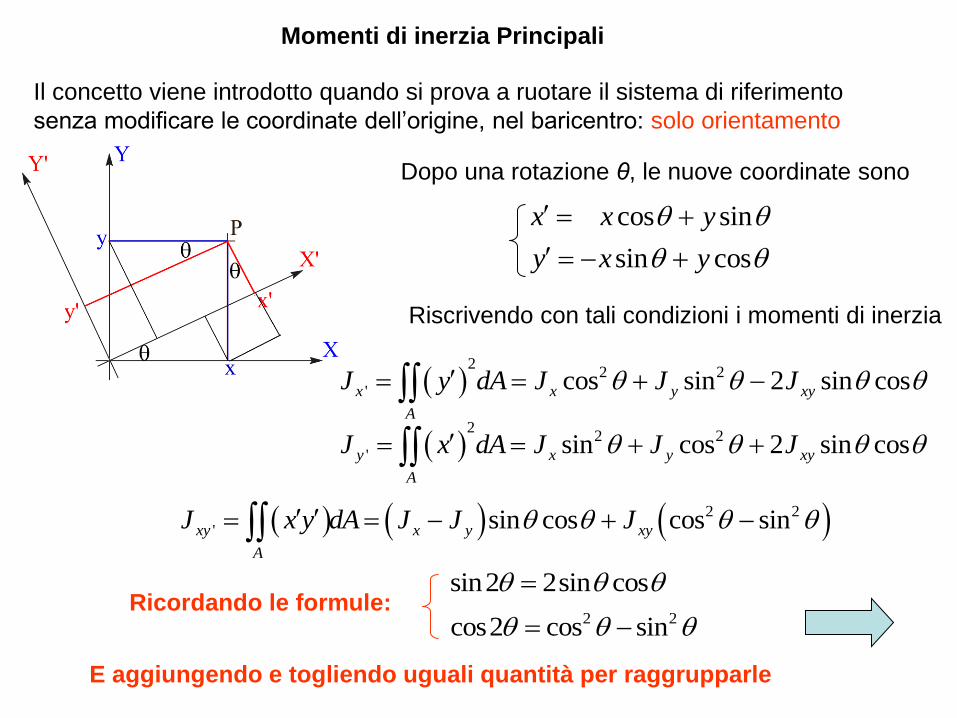
Momenti di inerzia Principali
Il concetto viene introdotto quando si prova a ruotare il sistema di riferimento
senza modificare le coordinate dell’origine, nel baricentro: solo orientamento
Dopo una rotazione θ, le nuove coordinate sono
cos sin
sin cos
x x y
y x y
Riscrivendo con tali condizioni i momenti di inerzia
2
2 2
' cos sin 2 sin cosx x y xy
A
J y dA J J J
2
2 2
' sin cos 2 sin cosy x y xy
A
J x dA J J J
2 2
' sin cos cos sinxy x y xy
A
J x y dA J J J
Ricordando le formule: sin2 2sin cos
2 2cos2 cos sin
E aggiungendo e togliendo uguali quantità per raggrupparle
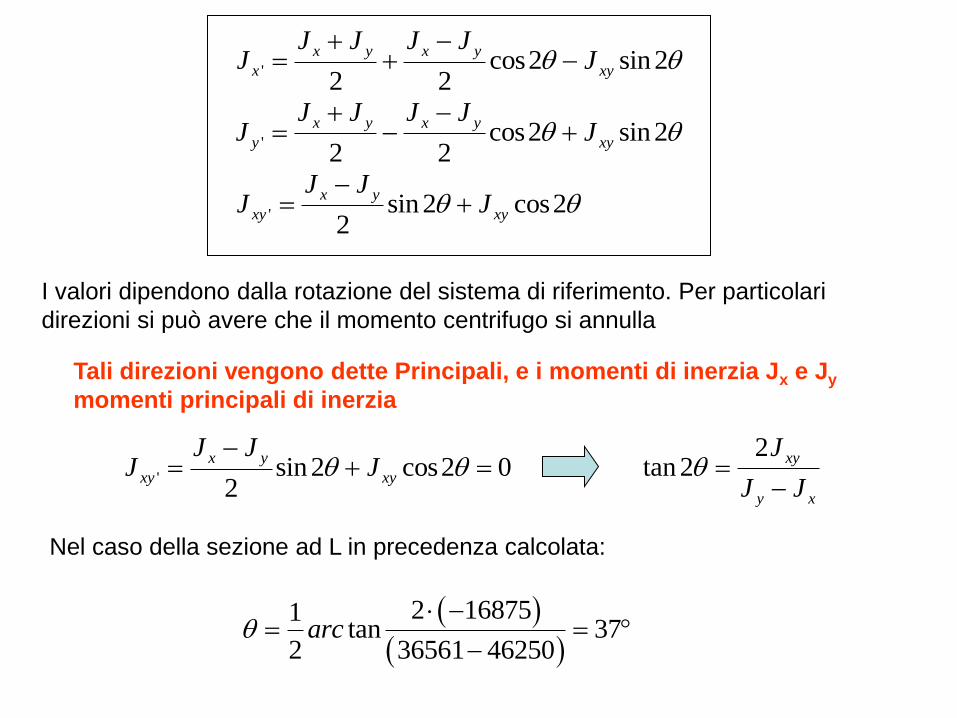
' cos2 sin22 2
x y x y
x xy
J J J JJ J
' cos2 sin22 2
x y x y
y xy
J J J JJ J
' sin 2 cos22
x y
xy xy
J JJ J
I valori dipendono dalla rotazione del sistema di riferimento. Per particolari
direzioni si può avere che il momento centrifugo si annulla
Tali direzioni vengono dette Principali, e i momenti di inerzia Jx e Jy
momenti principali di inerzia
' sin2 cos2 02
x y
xy xy
J JJ J
2tan 2
xy
y x
J
J J
Nel caso della sezione ad L in precedenza calcolata:
2 168751tan 37
2 36561 46250arc
Top Related