







Languages
Pages
Legal


Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
DISEÑO E IMPLEMENTACIÓN DE EXOESQUELETO PARA SIMULACIÓN DE PRÓTESIS
MIOELECTRICA DE ANTEBRAZO TRANSRADIAL
DESIGN AND IMPLEMENTATION OF EXOSKELETON FOR SIMULATION OF
FOREARM TRANSRADIAL MYOELECTRIC PROSTHESIS
Henry Montaña Quintero. Juan Darío Vivas Mateus1*. Jhon Pacanchique Martínez2**.
Resumen
En este proyecto se desarrollo un EXOESQUELETO CON EL FIN DE SIMULAR UNA
PRÓTESIS MIOELÉCTRICA [1]. DE ANTEBRAZO TRANSRADIAL
La metodología que se empleo en el desarrollo de este proyecto fue la siguiente. Se adquirió
la señal mediante electrodos, estos capturan señales mioeléctricas “pequeño voltaje
producido por los músculos al ser movidos”, las cuales se filtraran para dejar una señal
limpia, y la misma se ajustara a niveles eléctricos deseados. Posteriormente se ingreso esta
señal a un Arduino Nano3 que cumple con la función de control de todo el sistema, este a su
vez manipulara unos pequeños actuadores “servomotores” que serán soportados por medio
de una etapa de potencia la cual es alimentada por una batería de li-po, de esta forma la
1* Estudiante Tecnología en Electrónica de la Universidad Distrital francisco José de caldas. e-mail: [email protected] 2** Estudiante Tecnología en Electrónica de la Universidad Distrital francisco José de caldas. e-mail: [email protected] 3 https://www.arduino.cc/en/Main/ArduinoBoardNano

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
2
prótesis tiene movimiento, que depende de las pequeñas señales eléctricas capturadas al
mover los músculos, para este proyecto no se tuvo en cuenta el peso del exoesqueleto ya
que es un proyecto experimental, pero si se hará una breve investigación de cual material
seria el adecuado para una prótesis final.
Adicional a esto el exoesqueleto cuenta con una estructura que simulara la prótesis, esta
cuenta con 5 dedos los cuales cada uno tiene movimiento independiente. El prototipo está
diseñado en Solidwork [2]. Este mismo está basado en el proyecto INMOOV4 el cual es de
código abierto. A este se le realizaron pequeñas modificaciones para poder implementarlo en
este proyecto, toda la estructura fue elaborada en plástico ABS5 con una impresora
Solidoodle 3D de 2° generación.
Este proyecto se realizo en la Universidad Distrital Francisco José De Caldas.
Palabras clave
Señales electromiografías, electrodo superficial, dispositivos electromecánicos,
Procesamiento de señales biomédicas, extremidades artificiales, Mano protésica,
Extremidades protésicas, EGM.
Summary
This project is an EXOSKELETON DEVELOPED TO SIMULATE A MYOELECTRIC
PROSTHESIS [1]. TRANSRADIAL BENCH. The methodology employed in the development
of this project will be as follows. You want to acquire the signal electrodes by these
4 http://www.inmoov.fr/ 5 https://es.wikipedia.org/wiki/Acrilonitrilo_butadieno_estireno

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
myoelectric signals capture "small voltage produced by the muscles to be moved," which
leaked to leave a clean signal, and it would fit desired electrical levels. Subsequently seeking
to enter this signal to a Arduino Nano to comply with the control function of the whole system,
this in turn manipulate a small actuators "servo" which are supported by a power amplifier
which is powered by a battery Li-po, thus the prosthesis may have movement, which depends
on tiny electrical signals captured by moving the muscles, for this project at first the weight of
the exoskeleton is not taken into account because it is a pilot project, but if you do a little
research of what would be the right material for a final prosthesis.
In addition to this the exoskeleton has a structure that simulates the prosthesis, this has 5
fingers which each have independent movement. The prototype is designed in Solidwork [2].
The same is based on the INMOOV project which is open source. In this small modifications
were performed to implement this project, the entire structure was made of ABS plastic with a
3D printer Solidoodle 2nd generation.
This project was conducted in the University Francisco Jose De Caldas.
Key Words
Electromyography signal, electrode surface, electromechanical devices, biomedical signal
processing, artificial limbs, prosthetic hand, prosthetic limbs.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
4
1. OBJETIVOS
General
Diseñar e implementar un exoesqueleto que simule una prótesis mioeléctricas para
amputación de antebrazo transradial capaz de abrir, cerrar y girar 90 grados una pinza
en la terminación que hará las veces de mano.
Específicos
Diseñar e implementar la estructura del exoesqueleto que simule el antebrazo.
Seleccionar e Implementar sensores para la captura de potenciales mioeléctricas en el
antebrazo.
Diseñar e implementar la etapa de Filtrado de la señal adquirida y procesamiento de la
misma.
Diseñar e implementar la etapa Control de potencia para los actuadores
Ensamble y pruebas del diseño final.
2. Introducción
La electromiografía (EMG) es el estudio de los potenciales eléctricos generados por los
músculos durante el movimiento. En los últimos años se han estado utilizando en el diseño y
construcción de interfaces hombre-máquina con diferentes aplicaciones [3]. En este
documento se describe el proceso de diseño e implementación de un sistema que permite
detectar, mediante tres electrodos de superficie, las señales electromiograficas, producidas
en el brazo, específicamente en los músculos flexor de la muñeca flexor radial carpo, todos
del brazo derecho con el fin de manipular un prototipo de exoesqueleto que simulara una
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
prótesis de antebrazo con todos sus dedos. Los dedos serán controlados por las señales
electromiograficas las cuales le otorgaran al usuario la capacidad de abrir, cerrar y girar la
muñeca de la mano hasta 90 grados.
El exoesqueleto está diseñado para poder simular una prótesis en su funcionamiento ya que
las prótesis son sistemas muy complejos y estos tienen un diseño que se adapte al muñón
del usuario, el cual dificultaría la realización del proyecto ya que esto tiene que ser
supervisado directamente con especialistas en este campo. Al realizar este proyecto se
enfoco no solo en la parte electrónica del mismo, también se enfoco en la estética del
prototipo y buen funcionamiento frente a las órdenes del usuario.
La adquisición de las señales mioeléctricas se realizo mediante electrodos Ya que el poder
controlar una prótesis con el estimulo de los músculos facilita tareas a personas con
amputación transradial.
El diseño de la prótesis fue diseñado mediante el software Solidwork, teniendo en cuenta
detalles en las terminaciones de los dedos, para lograr ubicar los sensores resistivos que
indican la fuerza que se está aplicando sobre algún objeto, con la retroalimentación de estos
sensores en el sistema electrónico, se logran controlar los movimientos de apertura y cierre
de la mano sin dañar el objeto.
En esta sección se presenta la forma en que se obtienen las señales EMG, el tratamiento y
procesamiento de las mismas para posteriormente ser enviadas al dispositivo controlador y
actuadores.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
6
3. Diagrama De Solución.
A continuación en la figura 1 se presenta el diagrama de la solución del proyecto.
Figura 1. Diagrama de solución de la prótesis. ¨Autor ¨
4. Electrodos Superficiales
Los electrodos superficiales son colocados sobre la piel, estos electrodos son principalmente
superficies de metal, sin embargo, debido al estar en contacto directo con la piel hay que
tomar ciertas consideraciones: la piel es un tejido conductivo cuyo material intracelular y
extracelular está compuesto de soluciones electrolíticas, en la cual la corriente es
transportada por iones; mientras que el metal es un material altamente conductivo, en el cual
la corriente es transportada por electrones, en consecuencia, la interfaz electrodo piel es en
sí muy ruidosa [4]. Existen varios tipos de electrodos de superficie, estos se dividen principal
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
mente en dos grandes grupos: electrodos secos y electrodos húmedos [5]. Los electrodos
húmedos son aquellos en los que entre la placa de metal y la piel se encuentra una
substancia electrolítica o gel conductor [6]. esto se hace con el fin de minimizar el ruido
intrínseco que se genera entre el contacto de la piel y el metal, este gel conductor mejora la
conductividad y el flujo de la corriente.
En este proyecto se utilizaron electrodos de Ag/AgCl figura 2. Los cuales son ubicados 2 de
ellos en el musculo flexor radial carpo, y el tercero de ellos se ubica en la flexor de la muñeca
del paciente. Estos electrodos pueden tener otra ubicación la cual es: dos de ellos en el
biceps y el tercero en el tríceps.
Figura 2. Electrodo de Ag/AgCl “Autor”
5. Adquisición de la Señal EMG
A partir de las características conocidas de las señales EMG, corroboradas y mediante
prácticas de laboratorio, se implemento una etapa de amplificación, conformada inicialmente
por un amplificador diferencial, para lo cual se trabajo con el amplificador de instrumentación
AD620A (Analog Device ®) [7], con un rechazo en modo común (CMRR) entre 90-100 dB
que permite obtener una alta ganancia, esta es ajustable mediante una resistencia entre los
pines 1 y 8 y la siguiente ecuación (1), donde G es la ganancia que se desea obtener

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
8
𝑅𝐺 =49.4kΩ
G−1 (1)
Al resolver la ecuación (1). Se ha obtenido como resultado una resistencia de 330 ohmios y
para una mayor exactitud se usaron dos resistencias una de 220 y otra de 100 lo cual se
aprecia en la figura 3.
Figura 3 disposición de resistencias y entradas de señales de los electrodos en el AD620A6
5.1 Filtrado de la señal
Se implemento un filtro activo pasa banda, el cual limita las frecuencias de la señal a un
rango de entre 16 – 500 Hz, determinadas por las características propias de las señales
electromiografías [8]. El filtro que se utilizo para esta aplicación es el de Butterworth con
topología sallen-key de 4° orden, puesto que su respuesta en el circuito minimiza el rizado
en la banda de transmisión, esta es la característica más importante en la selección del filtro
de Butterworth para la detección de la señal EMG.
6 Hoja de datos AD620A “Análoga Device”

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Se ponen en serie un filtro Butterworth Pasa-bajos de 4° orden con frecuencia de corte de
500 Hz con un filtro Butterworth Pasa-altos de 4° orden con frecuencia de paso de 16Hz. El
cálculo de los componentes se presenta a continuación.
Los cálculos que se emplearon para realizar estos filtros fueron los siguientes: Lo primero
que se realiza es diseñar el filtro pasa bajas de Butterworth con ganancia unitaria con
topología Sallen-Key y una frecuencia de corte. En la tabla 1. Se muestran los coeficientes
los cuales se calcularon con la ecuación (2). Ésta ecuación corresponde a la función de
transferencia para un filtro Pasa-Bajas.
𝐴 𝑠 =𝐴0
1+𝑎1s+𝑏1𝑠2 1+𝑎2s+𝑏2𝑠2 … 1+𝑎𝑛 s+𝑏𝑛 𝑠2 =
𝐴0
(1+𝑎𝑖s+𝑏i𝑠2)i
(2)
Resolviendo la fórmula para un filtro de 4to orden, los coeficientes quedarían de la siguiente
forma.
Ai bi
Filtro 1 18.478 1.000
filtro 2 0.7654 1.000
Tabla 1. Coeficientes de Butterworth de cuarto orden7.
7 Robert F. Coughlin et al. Amplificadores operacionales y circuitos integrados lineales. Prentice Hall, Quinta edición

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
10
5.2 Filtro Pasa Bajas
Etapa 1 de filtro pasa bajas
Calculos.
Primero se calcula 𝐶2, proponiendo el valor para el capacitor 𝐶1. (3)
𝐶2 ≥ 𝐶14𝑏2
𝑎22 (3)
Se calcula 𝑅1 y 𝑅2. (4)
𝑅1/2 =𝑎2𝐶2± 𝑎2
2𝐶22−4b2C1C1
4π𝑓𝑐𝐶1𝐶2 (4)
Donde:
𝑓𝑐 es la frecuencia del corte.
𝑎2, 𝑏2 son los coeficientes de Butterworth para filtros de 4to orden.
𝐶1 Y 𝐶2 son los valores de los capacitores para el filtro Pasa-Bajas de la topología
Sallen-Key.
Etapa 2 de filtro pasa bajas
Calculos.
El cálculo de esta etapa es idéntico al de la etapa 1 difiriendo sólo en los valores de 𝑎𝑖 y 𝑏𝑖 .
Se especifica
Dado el 𝐶1, se calcula 𝐶2 (5)
𝐶2 ≥ 𝐶14𝑏1
𝑎12 (5)

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Y los valores de 𝑅1, y 𝑅2 son: (6)
𝑅1/2 =𝑎1𝐶1± 𝑎1
2𝐶22−4b1C1C2
4π𝑓𝑐𝐶1𝐶2 (6)
Donde:
𝑓𝑐 es la frecuencia del corte.
𝑎1 Y 𝑏1 son los coeficientes de Butterworth para filtros de 4to orden.
𝐶1 Y 𝐶2 son los valores de los capacitores para el filtro Pasa-Bajas de la topología
Sallen-Key.
En la figura 4 se puede observar el circuito de un filtro pasa bajas 𝑅2,𝑅3,𝐶3 y 𝐶4 son los
capacitores y las resistencias de la Etapa 2.
Figura 4 Filtro Pasa-Bajas Butterworth de cuarto orden con topología Sallen-Key8.
8 Robert F. Coughlin et al. Amplificadores operacionales y circuitos integrados lineales. Prentice Hall, Quinta edición
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
12
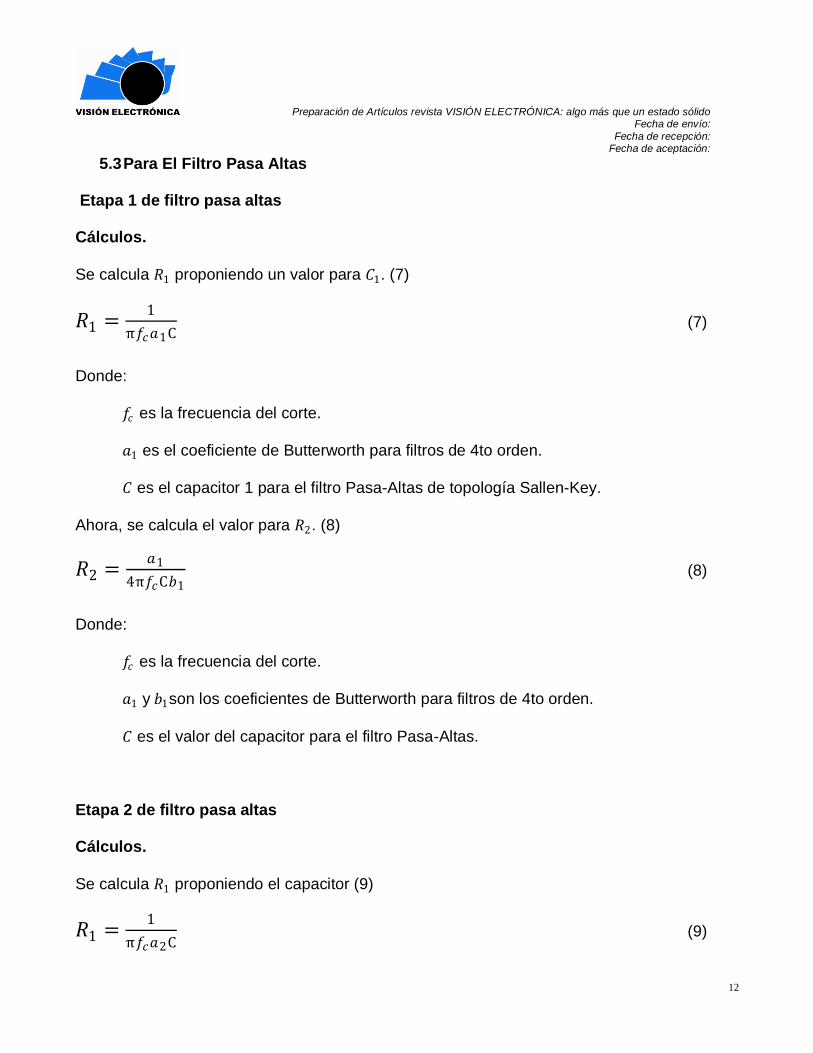
5.3 Para El Filtro Pasa Altas
Etapa 1 de filtro pasa altas
Cálculos.
Se calcula 𝑅1 proponiendo un valor para 𝐶1. (7)
𝑅1 =1
π𝑓𝑐𝑎1C (7)
Donde:
𝑓𝑐 es la frecuencia del corte.
𝑎1 es el coeficiente de Butterworth para filtros de 4to orden.
𝐶 es el capacitor 1 para el filtro Pasa-Altas de topología Sallen-Key.
Ahora, se calcula el valor para 𝑅2. (8)
𝑅2 =𝑎1
4π𝑓𝑐C𝑏1 (8)
Donde:
𝑓𝑐 es la frecuencia del corte.
𝑎1 y 𝑏1son los coeficientes de Butterworth para filtros de 4to orden.
𝐶 es el valor del capacitor para el filtro Pasa-Altas.
Etapa 2 de filtro pasa altas
Cálculos.
Se calcula 𝑅1 proponiendo el capacitor (9)
𝑅1 =1
π𝑓𝑐𝑎2C (9)

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Ahora, se calcula el valor de 𝑅2. (10)
𝑅2 =𝑎2
4π𝑓𝑐C𝑏2 (10)
Donde:
𝑓𝑐 es la frecuencia del corte.
𝑎2 y 𝑏2 son los coeficientes de Butterworth para filtros de 4to orden.
C es el valor del capacitor para el filtro Pasa-Altas.
El filtro Pasa-Altas de 4to orden consta de dos filtros de 2do orden conectados en cascada.
Por lo que el circuito final se muestra en la figura 5., tomando en cuenta que 𝐶3, 𝐶4 𝑅3 y 𝑅4
son de la segunda etapa.
Figura 5. Filtro Pasa-Altas Butterworth de cuarto orden con topología Sallen-Key9.
9 Robert F. Coughlin et al. Amplificadores operacionales y circuitos integrados lineales. Prentice Hall, Quinta edición

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
14
Como se describió anteriormente, el filtro Pasa-Bandas de 4to orden resulta de la conexión
en cascada del filtro Pasa-Bajas con el filtro Pasa-Altas, ambos de 4to orden. El resultado
final, se muestra en la figura 6.
Figura 6. Filtro Pasa-Bandas Butterworth de cuarto orden con topología Sallen-Key10.
5.4 Filtro Notch Rechaza Banda
El filtro Notch también es llamado filtro de muesca o filtro de rechazo de banda por la forma
en que rechaza a todas las frecuencias excepto un determinado rango de ellas. Este filtro es
de mucha utilidad cuando se necesita amplificar señales con muy pequeña amplitud y
cuando interfieren señales de mucho ruido que no son deseables. Las luces fluorescentes, la
fuente de voltaje, e incluso las personas provocan mucho ruido a la señal que se desea. La
frecuencia de ruido es de 50 o 60 Hz dependiendo el país donde se encuentre, es muy difícil
eliminar esta frecuencia de la señal, pero se puede lograr disminuir mediante el filtro notch.
Para diseñar un filtro muesca se tiene que construir un filtro pasa banda que tenga la misma
frecuencia resonante, ancho de banda y en consecuencia el Q del filtro muesca. Después se
conecta el sumador inversor eligiendo resistencias del mismo valor o muy cercanas para R
10 Robert F. Coughlin et al. Amplificadores operacionales y circuitos integrados lineales. Prentice Hall, Quinta edición

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
para lograr un funcionamiento satisfactorio. Por lo general los filtros muesca son ganancia
unitaria. Las ecuaciones correspondientes a Q,B,fl,fh, y fr, son idénticas a las del filtro pasa
banda.
Cálculos de filtro notch
Solamente se calcula 𝑅 y 𝑅𝑟 que son las resistencias del filtro pasa banda ya que los
capacitores se proponen. 𝑄 =𝐹𝑅
𝐵
𝑅 =0.1591
𝐵𝐶 (11)
𝑅𝑟 =𝑅
2𝑄2−1 (12)
De acuerdo a los componentes del filtro pasa banda se puede confirmar con la ecuación (13)
de la frecuencia de resonancia que si elimine la frecuencia de 60hz.
𝑓𝑟 =0.1125
𝑅𝐶 1 + 𝑅𝑅𝑟 (13)
Finalmentese requiere un circuito detector de envolvente11 para poder obtener una señal más
estable.
11 https://es.wikipedia.org/wiki/Detector_de_envolvente
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
16
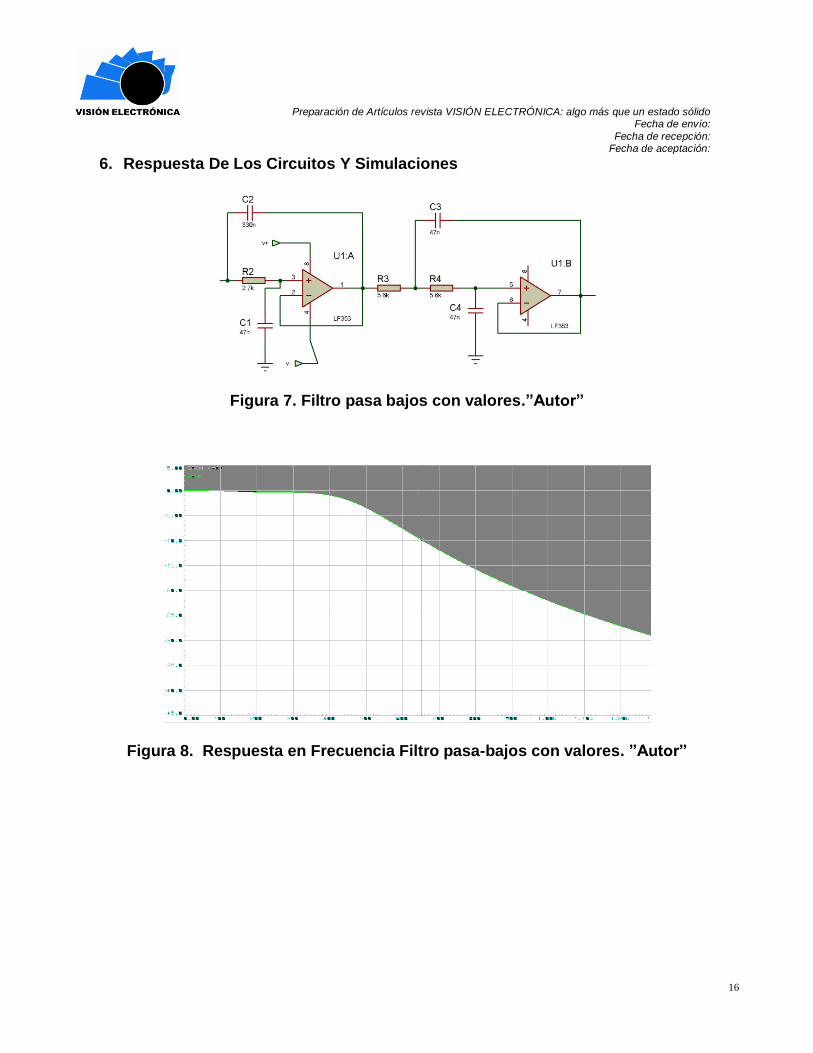
6. Respuesta De Los Circuitos Y Simulaciones
Figura 7. Filtro pasa bajos con valores.”Autor”
Figura 8. Respuesta en Frecuencia Filtro pasa-bajos con valores. ”Autor”
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
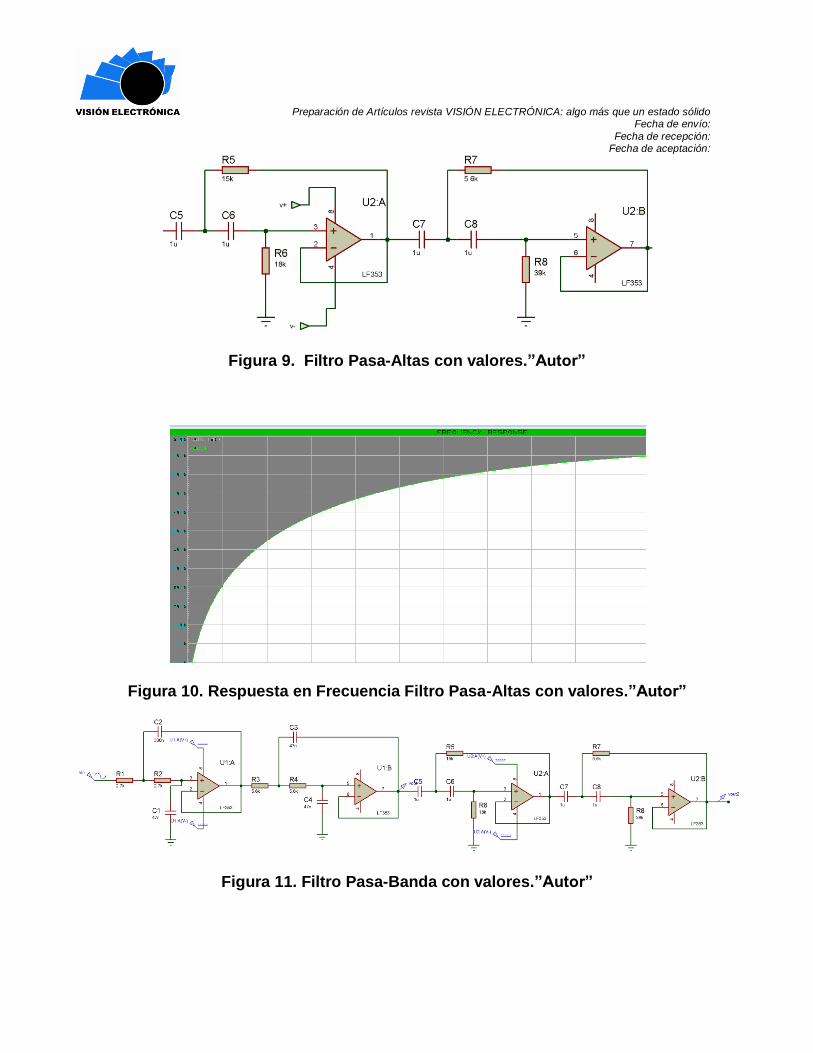
Figura 9. Filtro Pasa-Altas con valores.”Autor”
Figura 10. Respuesta en Frecuencia Filtro Pasa-Altas con valores.”Autor”
Figura 11. Filtro Pasa-Banda con valores.”Autor”

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
18
Figura 12. Respuesta en frecuencia Filtro Pasa-Banda con valores.”Autor”
Figura 13. Filtro Rechaza-Banda con valores. “Autor”
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 14. Respuesta en frecuencia Filtro Rechaza-Banda con valores.”Autor”
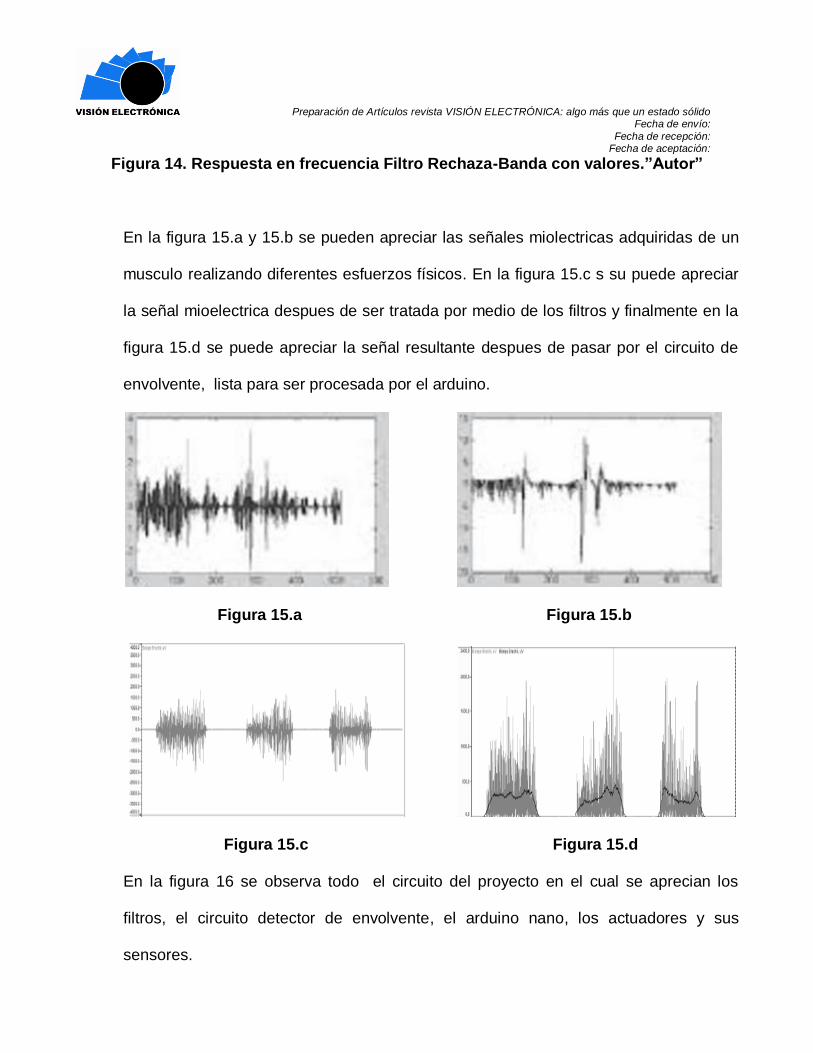
En la figura 15.a y 15.b se pueden apreciar las señales miolectricas adquiridas de un
musculo realizando diferentes esfuerzos físicos. En la figura 15.c s su puede apreciar
la señal mioelectrica despues de ser tratada por medio de los filtros y finalmente en la
figura 15.d se puede apreciar la señal resultante despues de pasar por el circuito de
envolvente, lista para ser procesada por el arduino.
Figura 15.a Figura 15.b
Figura 15.c Figura 15.d
En la figura 16 se observa todo el circuito del proyecto en el cual se aprecian los
filtros, el circuito detector de envolvente, el arduino nano, los actuadores y sus
sensores.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
20
Figura 16. Circuito completo.”Autor”
7. Sensor De Fuerza
El sensor de fuerza resistivo (FSR) es un dispositivo de película de polímero (PTF) que
presenta una disminución de la resistencia cuando aumenta la fuerza aplicada a la superficie
activa. Su sensibilidad a la fuerza está optimizada para uso en el control por toque humano
de dispositivos electrónicos. Las FSRs no son células de carga o galgas extensiométricas
aunque tengan propiedades similares. Las FSRs no son adecuadas para medidas de
precisión [9].
En la figura 17.a se aprecia la composición del sensor, en la figura 17.b. se puede observar
el circuito empleado para el sensor.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 17. a Figura 17. b
En el proyecto el sensor se implemento mediante la figura 14.b en configuración de divisor de
tensión, la señal obtenida es enviada a un pin análogo del arduino nano. Para ser procesada
en función a la fuerza ejercida en cada falange.
8. Servomotor
Un servomotor (o servo) es un motor de corriente continua que tiene la capacidad de ser
controlado en posición. Es capaz de ubicarse en cualquier posición dentro de un rango de
operación (generalmente de 180º) y mantenerse estable en dicha posición. Los servos se
suelen utilizar en robótica, automática y modelismo (vehículos por radio-control, RC) debido a
su gran precisión en el posicionamiento [10].
En el proyecto se implementaron servomotores mg996r los cuales trabajan desde 4.8 V a 7.4
V, alto torque 11 kgf∙cm (a 6 V), estos son controlados por medio de un arduino nano. La

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
22
disposición eléctrica del mismo se puede presenciar en la figura 18. En esta misma se
observa que el control y la potencia manejan fuentes de tensión individuales.
Figura 18. Disposición eléctrica del servo.”Autor”
9. Procesamiento Y Control De La Señal.
En esta etapa se realizo el control con un Arduino Nano, para controlar los seis servomotores
y capturar las señales de los cinco sensores de la prótesis. Con él se logro diferenciar las
diversas tensiones adquiridas y tratadas en la etapa anterior.
Al poder procesar la señal del paciente, con las señales de los sensores se puede tomar una
decisión según sea el caso. Mediante el Arduino Nano se ha logrado características únicas
en la prótesis las cuales se mencionan a continuación.
Calibración asistida de señales EMG para el uso de cualquier paciente sin necesidad
de un entrenamiento previo para usar la prótesis “cualquiera la puede usar”
Cierre paulatino de extremidades con el fin de recibir otra orden y poder actuar en el
momento
Cierre instantáneo configurable

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Apertura paulatina de extremidades con el fin de recibir otra orden y poder actuar en el
momento
Apertura instantánea configurable
Rotación de la muñeca de hasta 90 grados
Censado de fuerza en todo momento
Test al inicio de su funcionamiento para verificar el buen funcionamiento de cada
extremidad.
Configuraciones adicionales según programación.
10. Fabricación De La Prótesis
Para la fabricación de la prótesis fue necesaria la utilización de una impresora 3D12. En este
proyecto se utilizo una impresora Soliddodle13 de segunda generación. Los diseños fueron
adquiridos del proyecto INMOOV14 el cual es de código abierto y se modificaron algunos
diseños para beneficio del prototipo. El material que se utilizo para la elaboración del
prototipo es el plástico ABS el cual tiene unas características muy buenas en cuanto a
resistencia a impactos y a la abrasión entre otras. A continuación serán presentadas algunas
imágenes de los diseños.
10.1 Diseño De Un Dedo.
12 https://es.wikipedia.org/wiki/Impresora_3D 13 http://www.hd-tecnologia.com/solidoodle-impresora-3d-de-2o-generacion/ 14 http://www.inmoov.fr/download/
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
24
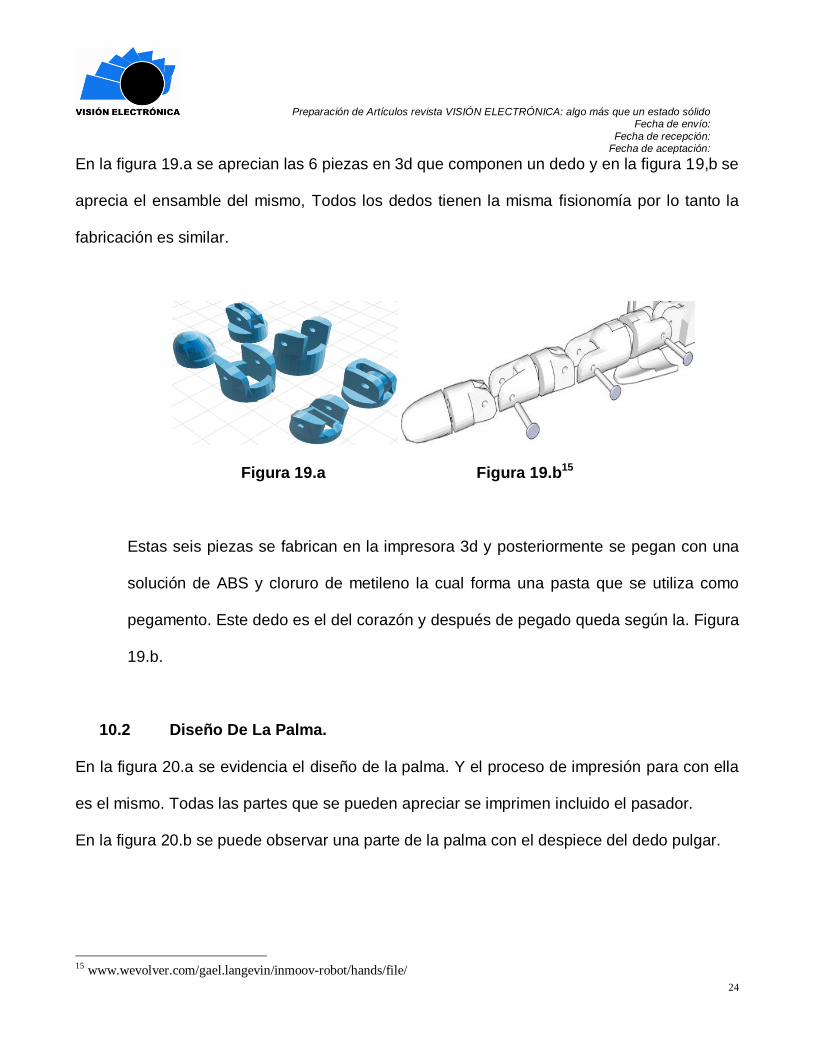
En la figura 19.a se aprecian las 6 piezas en 3d que componen un dedo y en la figura 19,b se
aprecia el ensamble del mismo, Todos los dedos tienen la misma fisionomía por lo tanto la
fabricación es similar.
Figura 19.a Figura 19.b15
Estas seis piezas se fabrican en la impresora 3d y posteriormente se pegan con una
solución de ABS y cloruro de metileno la cual forma una pasta que se utiliza como
pegamento. Este dedo es el del corazón y después de pegado queda según la. Figura
19.b.
10.2 Diseño De La Palma.
En la figura 20.a se evidencia el diseño de la palma. Y el proceso de impresión para con ella
es el mismo. Todas las partes que se pueden apreciar se imprimen incluido el pasador.
En la figura 20.b se puede observar una parte de la palma con el despiece del dedo pulgar.
15 www.wevolver.com/gael.langevin/inmoov-robot/hands/file/

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 20.a Figura 20.b16.
10.3 Mano Completa
Figura 21 Ensamble de toda la mano.17
11. Ensamblaje De La Mano
En el ensamble de la mano se puede apreciar dos cables, los cuales cumplen la función de
tendones en los dedos, “permitiendo abrir y cerrar los dedos”. Estos mismos facilitan la
transmisión de las señales de los sensores resistivos que se encuentran ubicados en la yema
16 www.wevolver.com/gael.langevin/inmoov-robot/hands/file/ 17 www.wevolver.com/gael.langevin/inmoov-robot/hands/file/
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
26
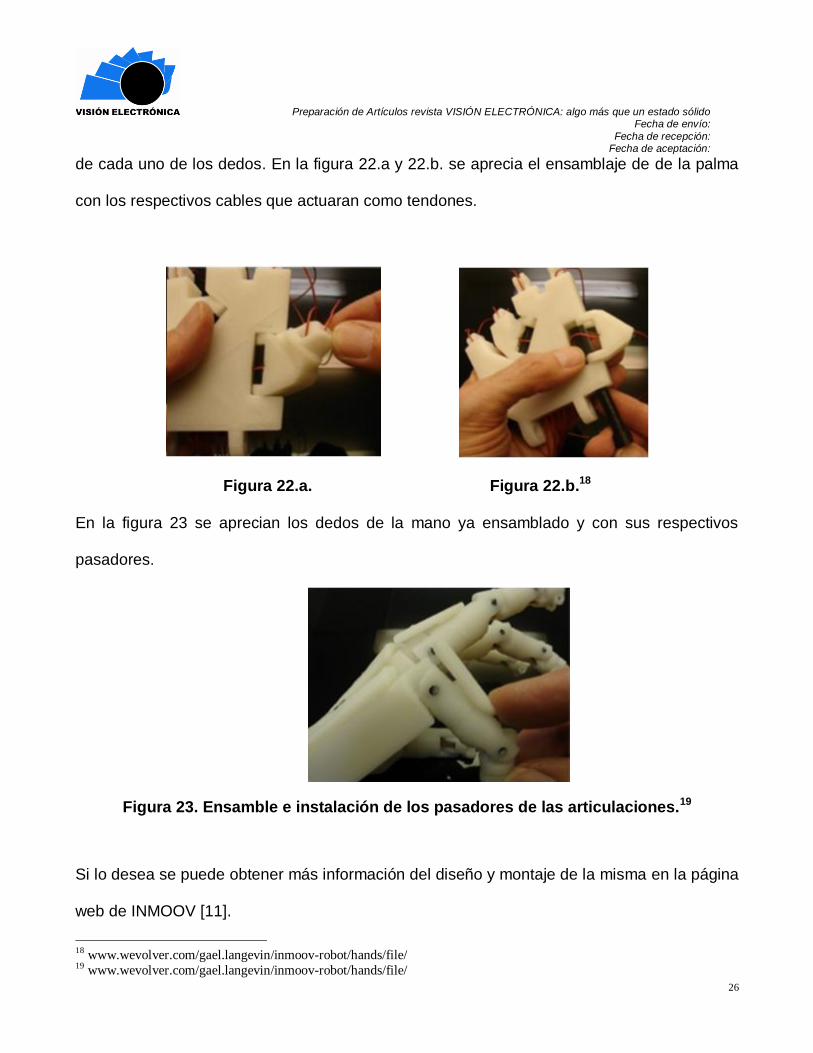
de cada uno de los dedos. En la figura 22.a y 22.b. se aprecia el ensamblaje de de la palma
con los respectivos cables que actuaran como tendones.
Figura 22.a. Figura 22.b.18
En la figura 23 se aprecian los dedos de la mano ya ensamblado y con sus respectivos
pasadores.
Figura 23. Ensamble e instalación de los pasadores de las articulaciones.19
Si lo desea se puede obtener más información del diseño y montaje de la misma en la página
web de INMOOV [11].
18 www.wevolver.com/gael.langevin/inmoov-robot/hands/file/ 19 www.wevolver.com/gael.langevin/inmoov-robot/hands/file/

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Figura 24. Prototipo ensamblado donde se presencian los cinco actuadores.”Autor”
En estas imágenes se puede apreciar el montaje de los actuadores “servomotores” los
cuales controlaran los movimientos de los dedos. Se eligieron hilos de nylon como tendones
en lugar de los cables ya que estos no presentan fatiga a la torsión y fuerza que se le
ejercen. La punta de los dedos es de goma ya que presentan mejor agarre y ocultan los
sensores de fuerza que se encuentran en cada dedo.
En la figura 25.a y 25.b se visualiza la prótesis ensamblada en su totalidad por ambas caras.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
28
Figura 25.a Figura 25.b.”Autor”
Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
12. Calibración De La Prótesis
La prótesis posee un auto ajuste al arrancar el cual es visualizado por medio de dos diodos
emisores de luz “led´s”:
Mientras que el led 1 esté encendido la mano del paciente debe permanecer relajada.
Después de dos segundos el led 1 se apaga y se enciende el led 2, el cual indica que
la mano del paciente debe estar cerrada pero sin ejercer fuerza.
Posteriormente el led 2 se apaga, quedando así la prótesis calibrada para ese
paciente.
12.1 Manejo De la Prótesis
Una vez calibrada la prótesis estará lista para su uso. La forma de uso es la siguiente.
Para abrir la mano de la prótesis, simplemente basta con relajar la mano del paciente
al máximo.
Para cerrar la mano de la prótesis, simplemente el paciente debe cerrar la mano
suavemente sin realizar mucha fuerza.
Para que la mano de la prótesis rote el paciente debe cerrar su mano con fuerza.
12.2 Tabla De Pruebas
A continuación se presenta la tabla 2 de pruebas repetitivas realizadas a la prótesis
en donde se evidencia, el porcentaje de respuesta positiva a las señales generadas en
seis pacientes de diferentes edades, en donde la mano abierta en el paciente hace

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
30
que la prótesis abra la mano, la mano cerrada del paciente hace que la prótesis cierre
y cuando el paciente cierra la mano con fuerza la prótesis responde realizando una
rotación en la muñeca hacia el lado izquierdo. Se realizaron 5 pruebas por paciente.
Tabla 2 Pruebas en diversos pacientes.”Autor”
13. Fuentes de Alimentación
Para la alimentación se utilizaron en total siete baterías de Li-po “polímero de litio”, ya que
son baterías muy eficientes y de muy bajo peso, las cuales son usadas también en
aeromodelismo. Cada batería entrega 3,7v y 1300mAh por lo cual fue necesario
disponerlas de la siguiente forma.
Mano Paciente
%Respuesta Prótesis
Mano Paciente
%Respuesta Prótesis
Mano Paciente
%Respuesta Prótesis
Niño 3 Años
Mano Abierta
92 Mano Cerrada
94 Mano Cerrada Fuerte
91
Mujer 21
Años
Mano Abierta
87 Mano Cerrada
88 Mano Cerrada Fuerte
90
Hombre 29
Años
Mano Abierta
85 Mano Cerrada
83 Mano Cerrada Fuerte
88
Hombre 66
Años
Mano Abierta
72 Mano Cerrada
73 Mano Cerrada Fuerte
72
Hombre 26
Años
Mano Abierta
87 Mano Cerrada
90 Mano Cerrada Fuerte
88
Mujer 54
Años
Mano Abierta
75 Mano Cerrada
77 Mano Cerrada Fuerte
78

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Para la etapa de potencia o servomotores se utilizaron cuatro baterías en
configuración serie y paralelo, para así conformar una fuente de 7.4V y 2600mAh.
Para las etapas de procesamiento de la señal y el control fue necesario utilizar
tres baterías. Obteniendo una fuente dual de +7.4V y -3,7V a 1300mAh.
Las baterías utilizadas se pueden apreciar en la figura 26.
Figura 26. Batería de li-po. “Autor”
14. Conclusiones
Para obtener las señales EMG es necesario que la piel del paciente se encuentre muy
limpia y libre de cabellos.
Para poder realizar un buen trabajo con las señales EMG es necesario implementar
filtros de alto orden ya que los filtros de bajo orden no proporcionan un filtrado tan
eficiente para poder tratar la señal posteriormente.
Es importante saber en qué puntos ubicar los electrodos para que las señales sean
de buena amplitud.
Al realizar las pruebas se encontró que se tiene mejor respuestas en pacientes
jóvenes, en este caso el niño de 3 años es quien tuvo mejor respuesta, aun cuando
este no tenía la disposición para las pruebas.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
32
Mediante la tabla 2 se puede apreciar que las señales mioeléctricas tienen mejor
respuesta en las personas jóvenes, cuando no hay un previo entrenamiento. Para las
personas de mayor edad es aconsejable que tengan un previo entrenamiento.
Es necesaria la utilización de sensores en cada dedo para que tome de manera
adecuada los objetos.

Preparación de Artículos revista VISIÓN ELECTRÓNICA: algo más que un estado sólido Fecha de envío:
Fecha de recepción: Fecha de aceptación:
Referencias Bibliográficas.
[1] Merletti, Roberto “Electromyography - Physiology, Engineering, and Noninvasive
Applications”. Editado por: Merletti, Roberto; Parker, Philip © 2004 John Wiley & Sons.
[2] Arduino Nano: www.arduino.cc/en/Main/ArduinoBoardNano.
[3,4] Merletti, Roberto “Electromyography - Physiology, Engineering, and Noninvasive
Applications”. Editado por: Merletti, Roberto; Parker, Philip © 2004 John Wiley & Sons.
[5] Searle A. and L Kirkup “A direct comparison of wet, dry and isolating bioelectric recordings
electrodes ”. Departament of Applied Physics, university of technology, Sydney, Broadway,
NSW, 2007, Australia
[6] Khandpur R.S. “Biomedical instrumentations. Technology and aplications”, MacGraw-Hill.
[7] Hoja de datos AD620A ANALOG DEVICES.
[8] Merletti, Roberto “Electromyography - Physiology, Engineering, and Noninvasive
Applications”. Editado por: Merletti, Roberto; Parker, Philip © 2004 John Wiley & Sons.
[9] Análisis del funcionamiento del sensor de fuerza resistivo (fsr) con labview
[10] Servomotores. Grupo de Automática, Robótica y Visión Artificial – Universidad De
Alicante
[11] http://inmoov.fr/download/
[12] Hoja de datos LF353 TEXAS INSTRUMENTS.
[13] Hoja de datos IRF740 FAIRCHILD Semiconductor.
[14] Hoja de datos LM7805 FAIRCHILD Semiconductor.
Top Related