






Languages
Pages
Legal


Complex Eigenvalues and Phase Portraits

Fundamental Set of SolutionsFor Linear System of ODEs
y1y2
=a22
a12a11a21
� �y01y02
�
With Eigenvalues and Eigenvectors�1 v1and and v2�2
The General Solution Takes The Form
y1y2
�= C1 C2+e�1t v1 e�2tv2
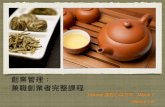
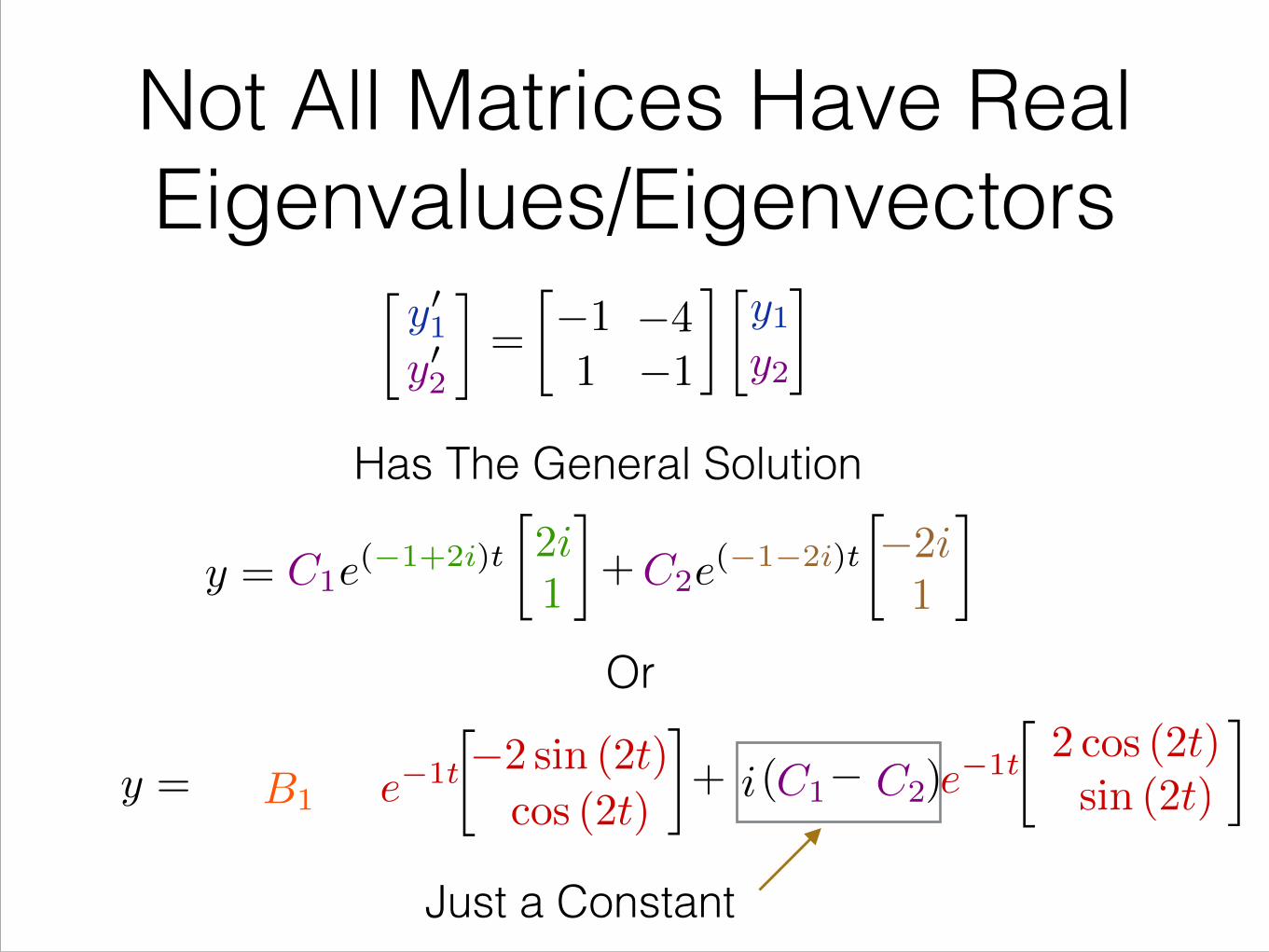
Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has Eigenvalues and Eigenvectors
�1 v1and=�1 + 2i =2i1
�and= =
�,
1�2i
�2 v2�1� 2i
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
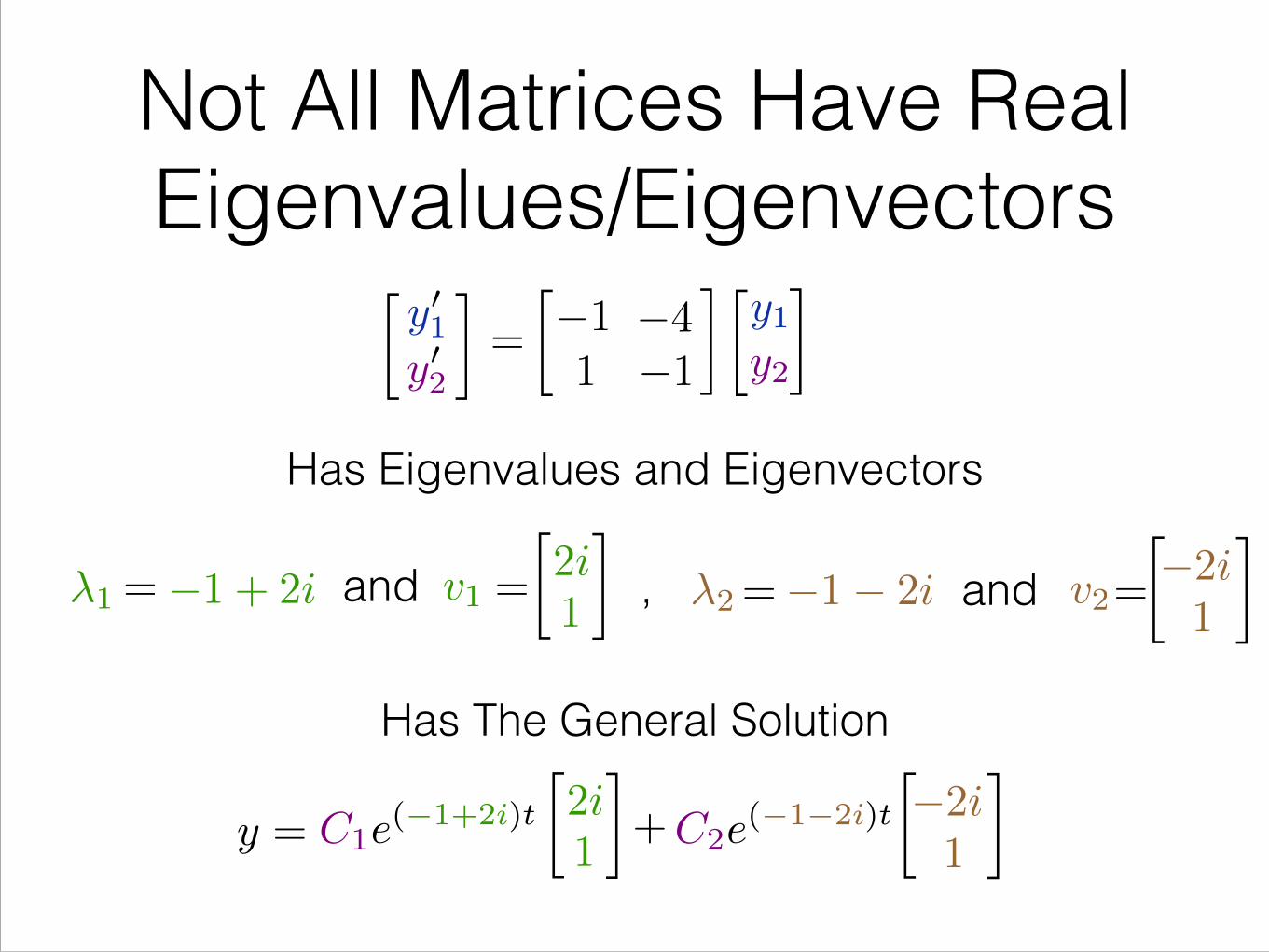
Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
Lots of Complex NumbersWe want a Real General Solution

Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
Lots of Complex NumbersWe want a Real General Solution
Recall Euler’s Formula
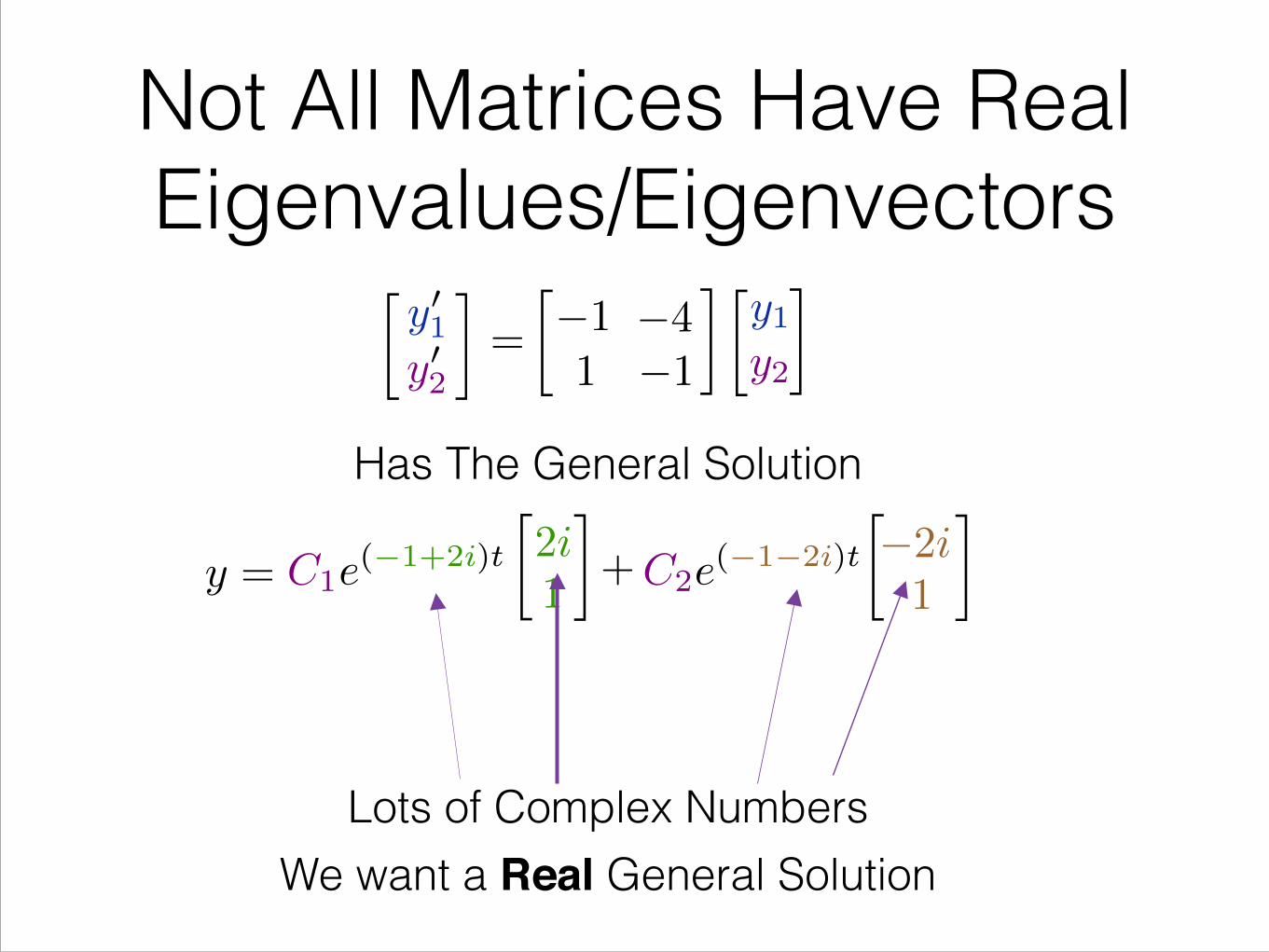
Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
y =�2 sin (2t)cos (2t)
�e�1tC1 C2+( )
�e�1tC1 C2( )+ i �
2 cos (2t)sin (2t)
Or
Just a Constant

Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
y =�2 sin (2t)cos (2t)
�e�1t
�e�1tC1 C2( )+ i �
2 cos (2t)sin (2t)
Or
Just a Constant
B1
Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
y =�2 sin (2t)cos (2t)
�e�1t
�e�1tC1 C2( )+ i �
2 cos (2t)sin (2t)
Or
Just a Constant
B1

Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
y =�2 sin (2t)cos (2t)
�e�1t
�e�1t+
2 cos (2t)sin (2t)
Or
Just a Constant
B1 B2
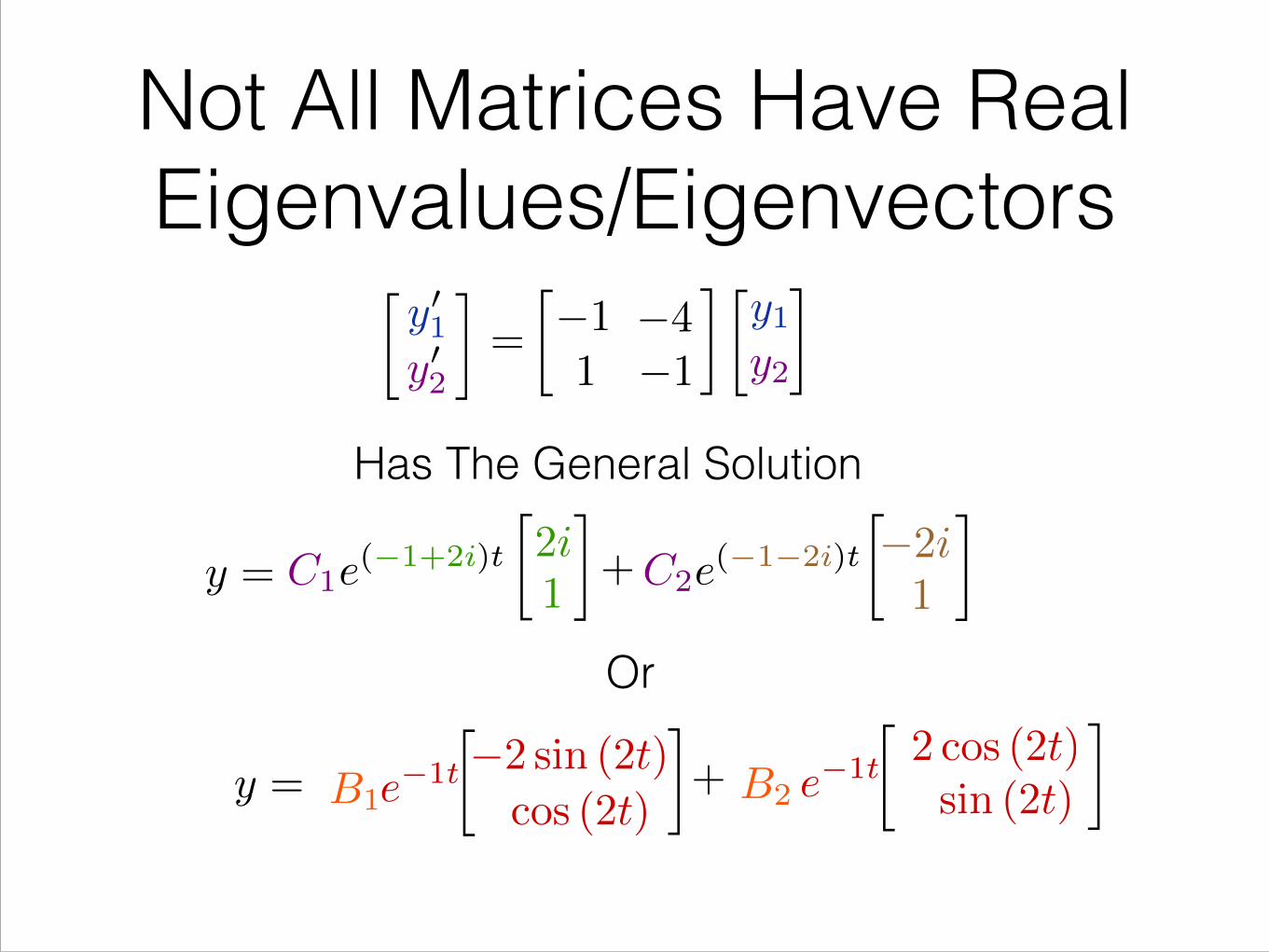
Not All Matrices Have Real Eigenvalues/Eigenvectors
y1y2
=
� �y01y02
��11
�4�1
Has The General Solution
C1e(�1+2i)t C2e
(�1�2i)t+2i1
� �
1�2i
y =
y =�2 sin (2t)cos (2t)
�e�1t
�e�1t+
2 cos (2t)sin (2t)
Or
B1 B2

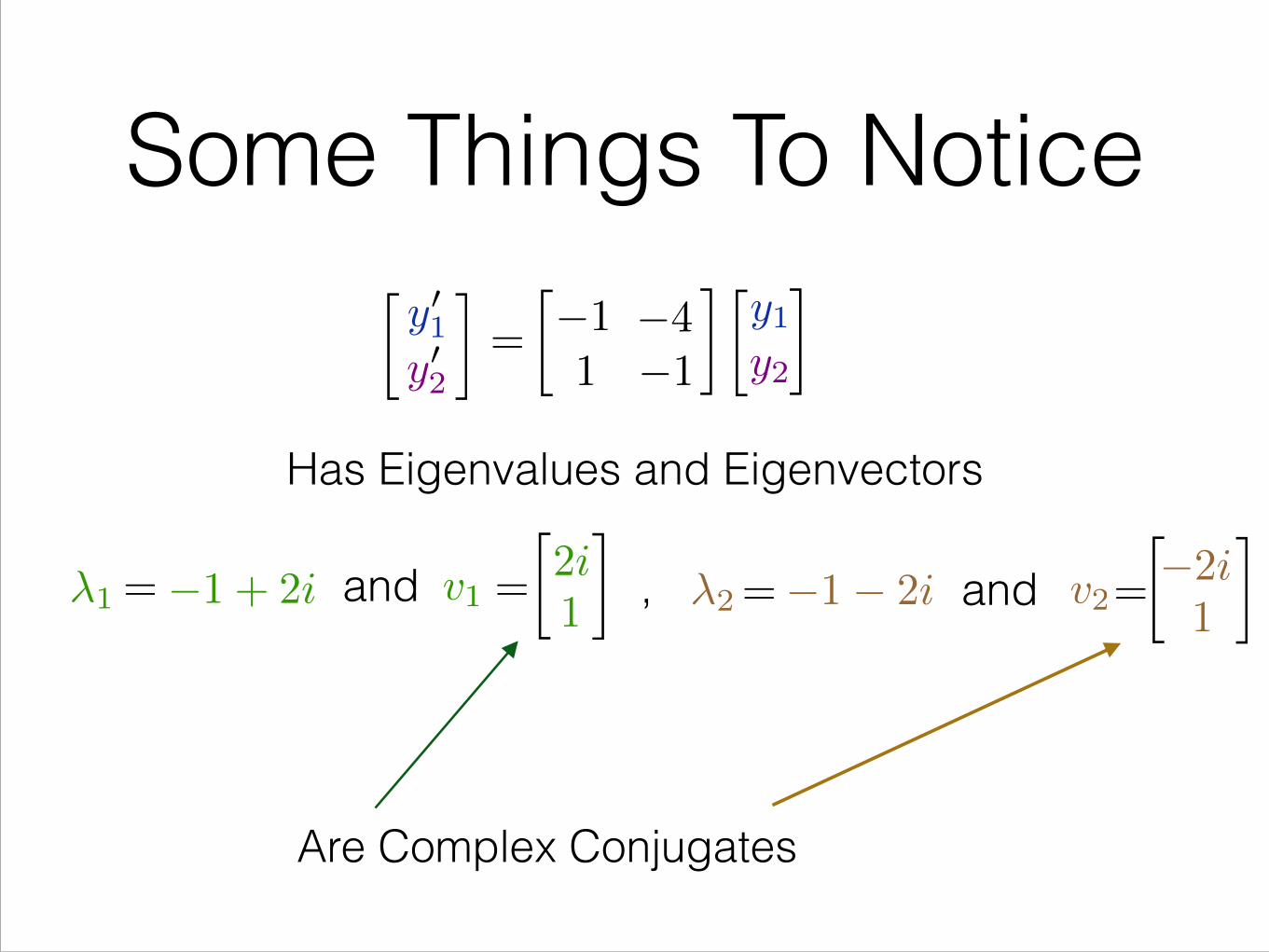
Some Things To Noticey1y2
=
� �y01y02
��11
�4�1
Has Eigenvalues and Eigenvectors
�1 v1and=�1 + 2i =2i1
�and= =
�,
1�2i
�2 v2�1� 2i
Are Complex Conjugates
Some Things To Noticey1y2
=
� �y01y02
��11
�4�1
Has Eigenvalues and Eigenvectors
�1 v1and=�1 + 2i =2i1
�and= =
�,
1�2i
�2 v2�1� 2i
Are Complex Conjugates
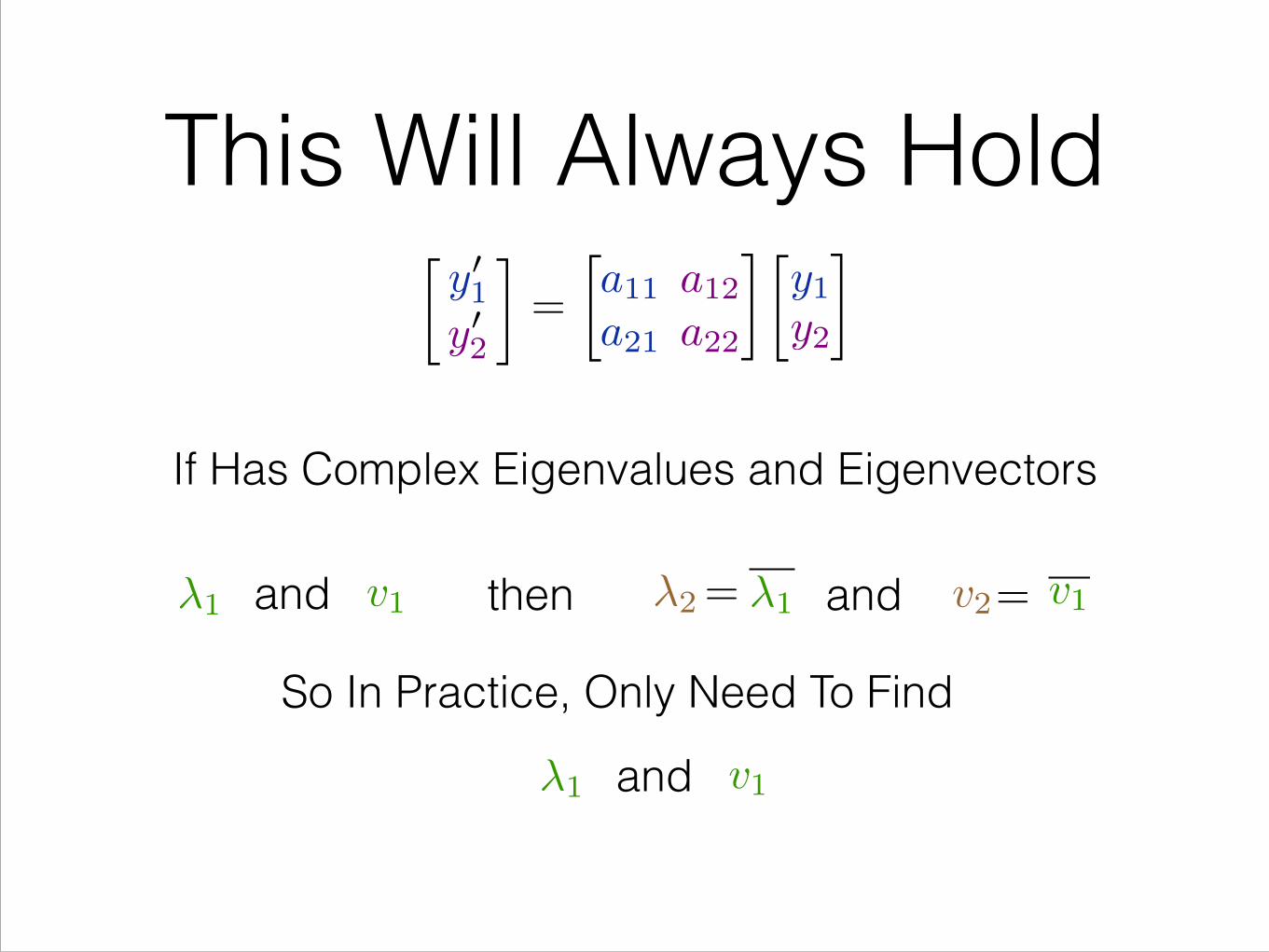
This Will Always Hold
If Has Complex Eigenvalues and Eigenvectors
�1 v1 then =�2
y1y2
=a22
a12a11a21
� �y01y02
�
and �1 and v1=v2
So In Practice, Only Need To Find
�1 v1and
This Will Always Hold
�1 v1 then =�2
y1y2
=a22
a12a11a21
� �y01y02
�
and �1 and v1=v2
So In Practice, Only Need To Find
�1 v1and
If This Has Complex Eigenvalues and Eigenvectors
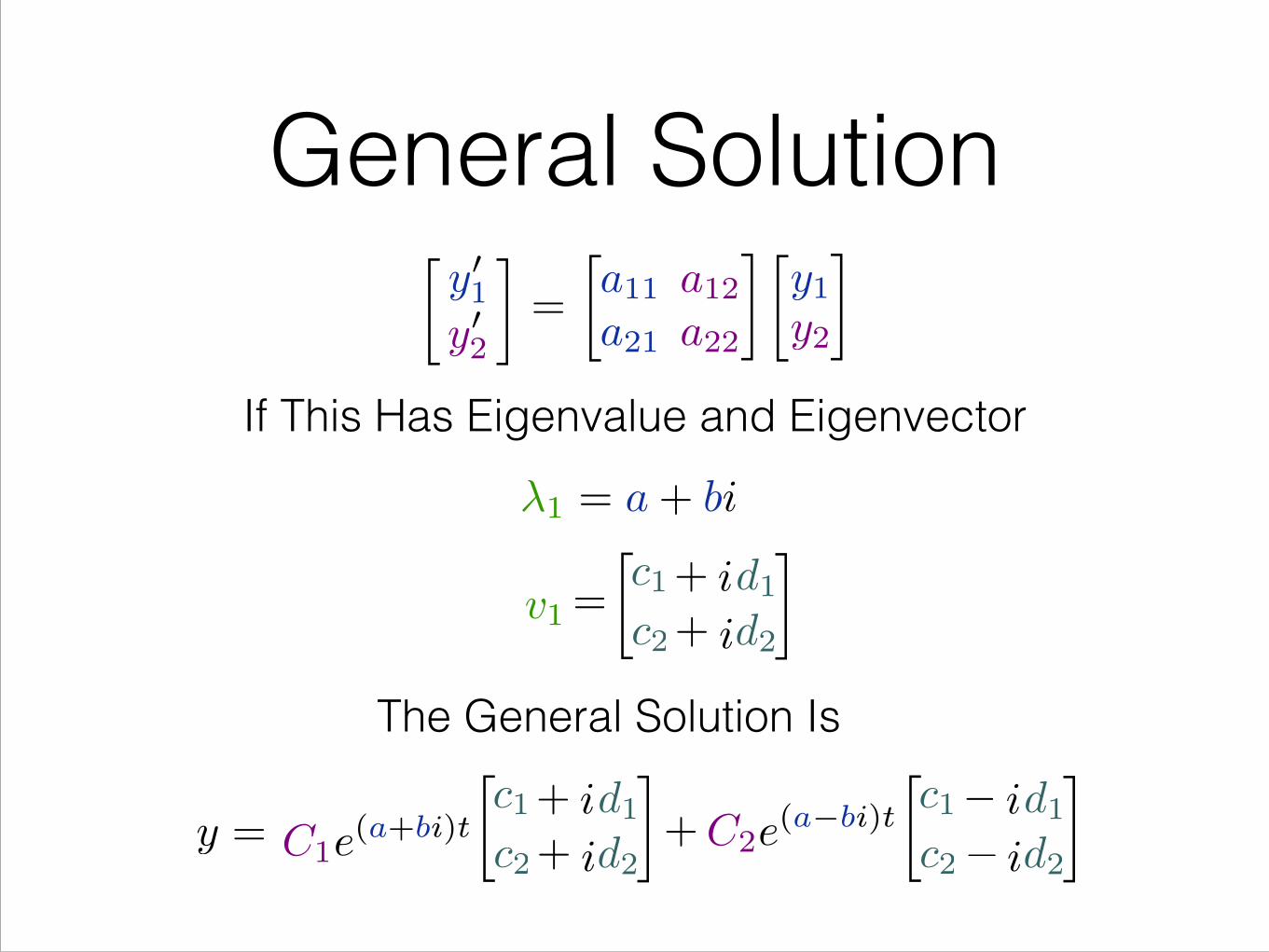
General Solutiony1y2
=a22
a12a11a21
� �y01y02
�
�1 = a+ bi
v1=
+
�y =
The General Solution Is
C1e(a+bi)t
c1c2
d1d2
ii
++ C2e
(a�bi)t
�c1c2
d1d2
ii
��
�c1c2
d1d2
ii
++
If This Has Eigenvalue and Eigenvector

General Solutiony1y2
=a22
a12a11a21
� �y01y02
�
�1 = a+ bi v1=
�c1c2
d1d2
ii
++
The General Solution Is
y = eatB1
�c1cos (bt) sin (bt)� d1cos (bt) sin (bt)�c2 d2
+
eat �c1 cos (bt)sin (bt) d1
cos (bt)sin (bt)c2 d2
++
B2
If This Has Eigenvalue and Eigenvector
Questions?

Phase PortraitsRemember Direction Fields:
t
y
y0 = (1� t) y
2.1
0.5 1.0 1.5
3.1
4.1
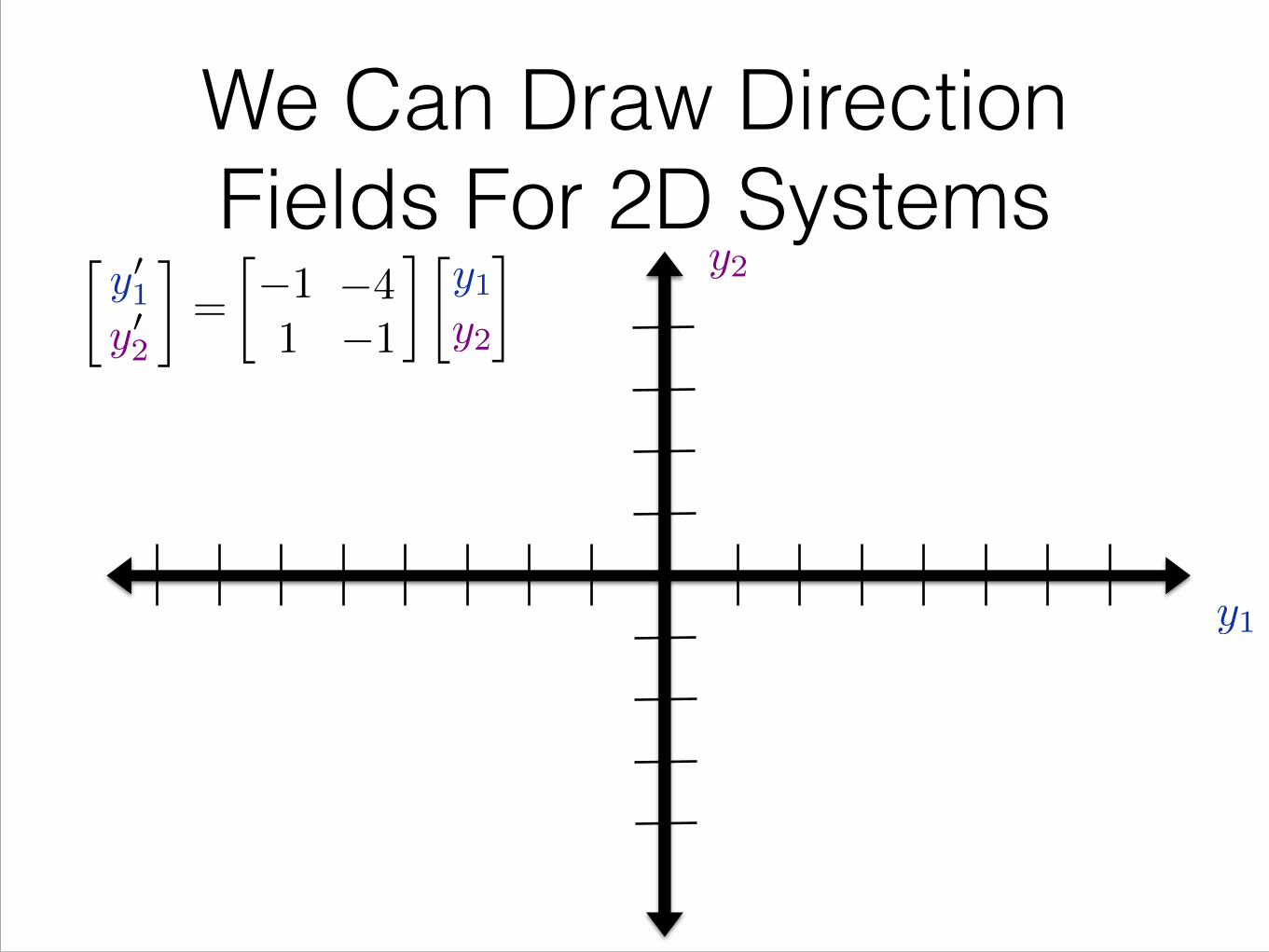
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2

We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
� ��11
�4�1
11
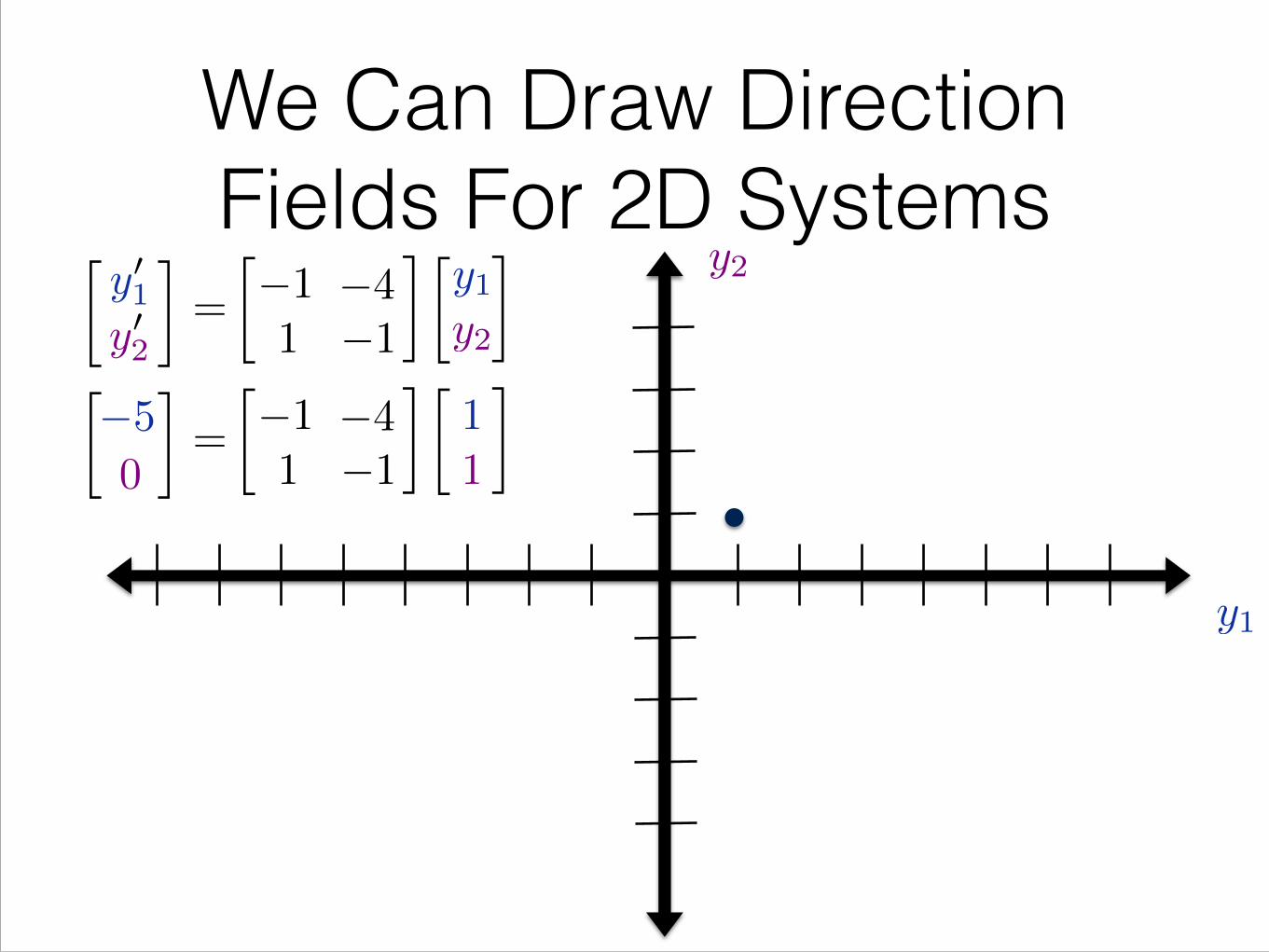
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
=
� � ��11
�4�1
110
�5

We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
=
� � ��11
�4�1
110
�5
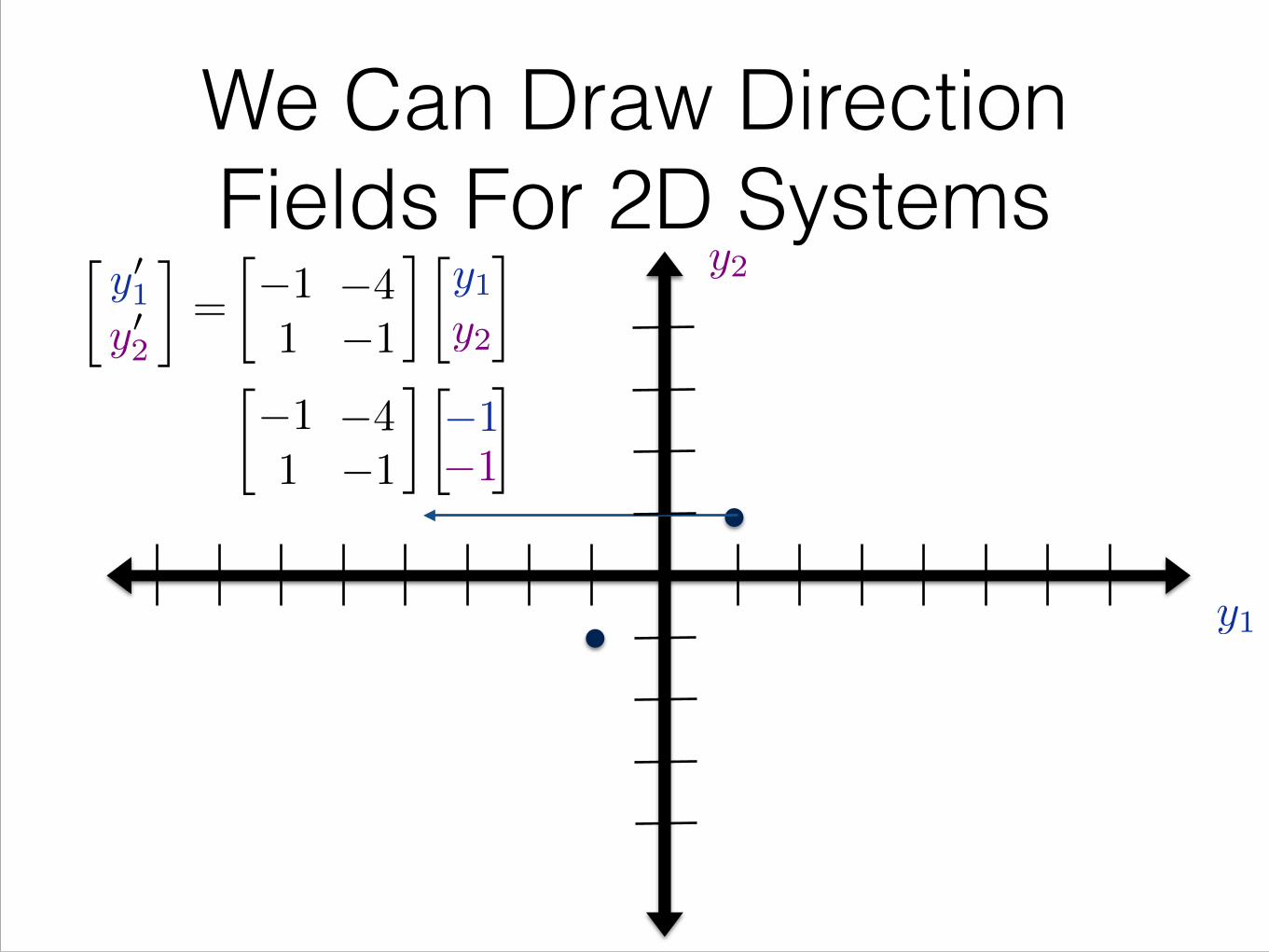
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
� ��11
�4�1
�1�1

We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
=
� � ��11
�4�1
�1�10
5

We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
=
� � ��11
�4�1
�1�10
5

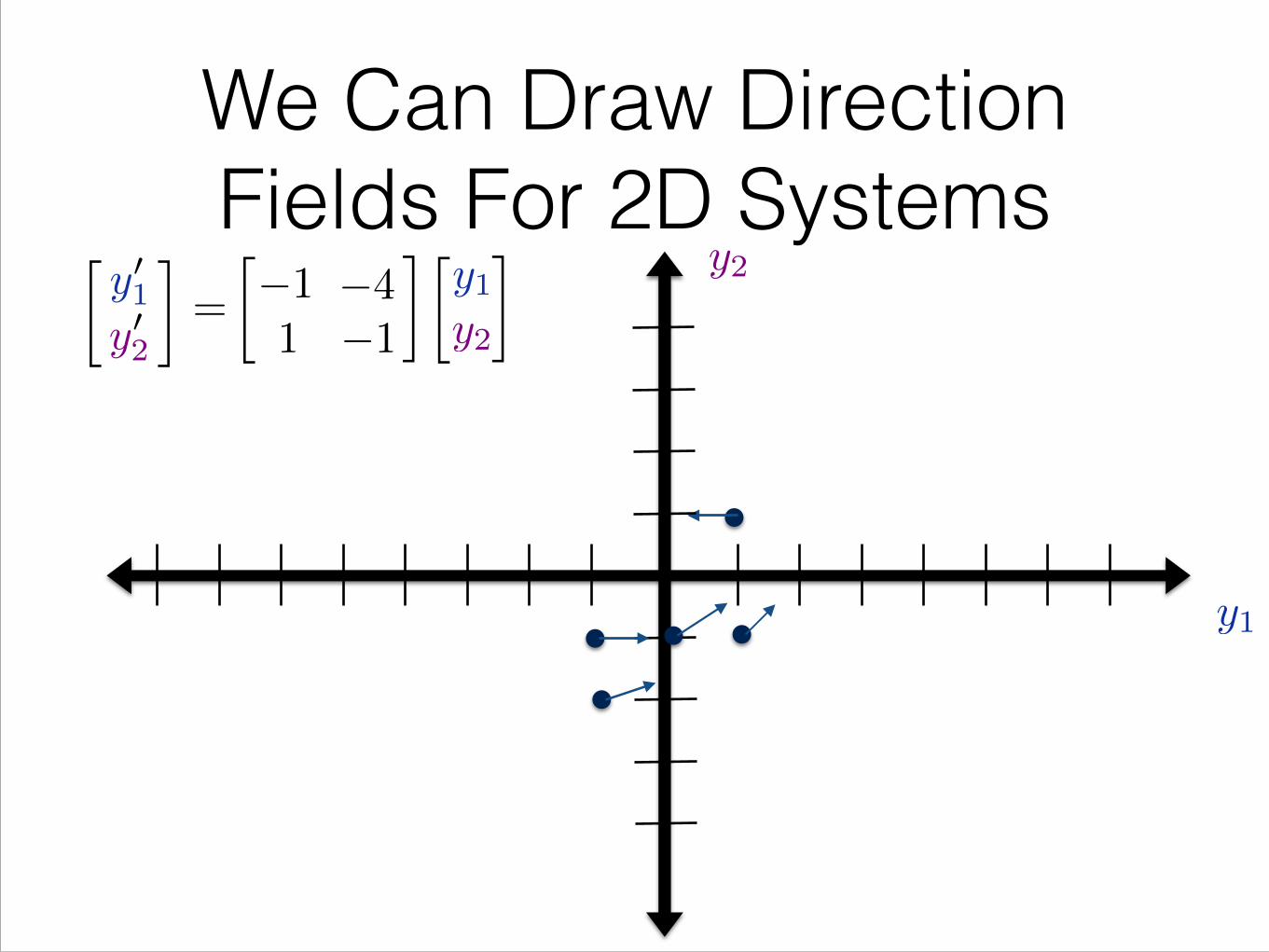
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2

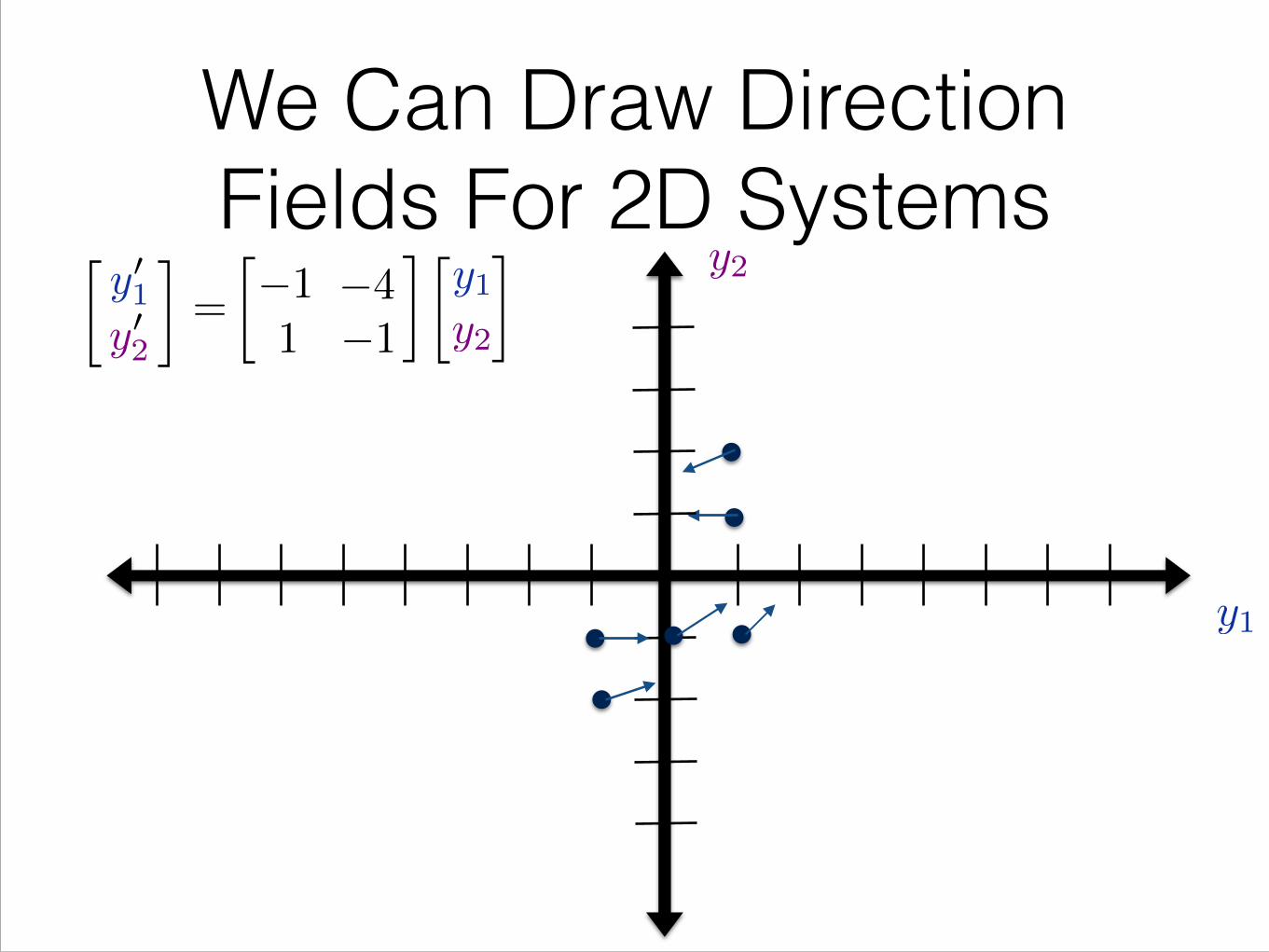
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2

We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2

We Can Draw Direction Fields For 2D Systems
y1y2
=
� �y01y02
��11
�4�1
y1
y2
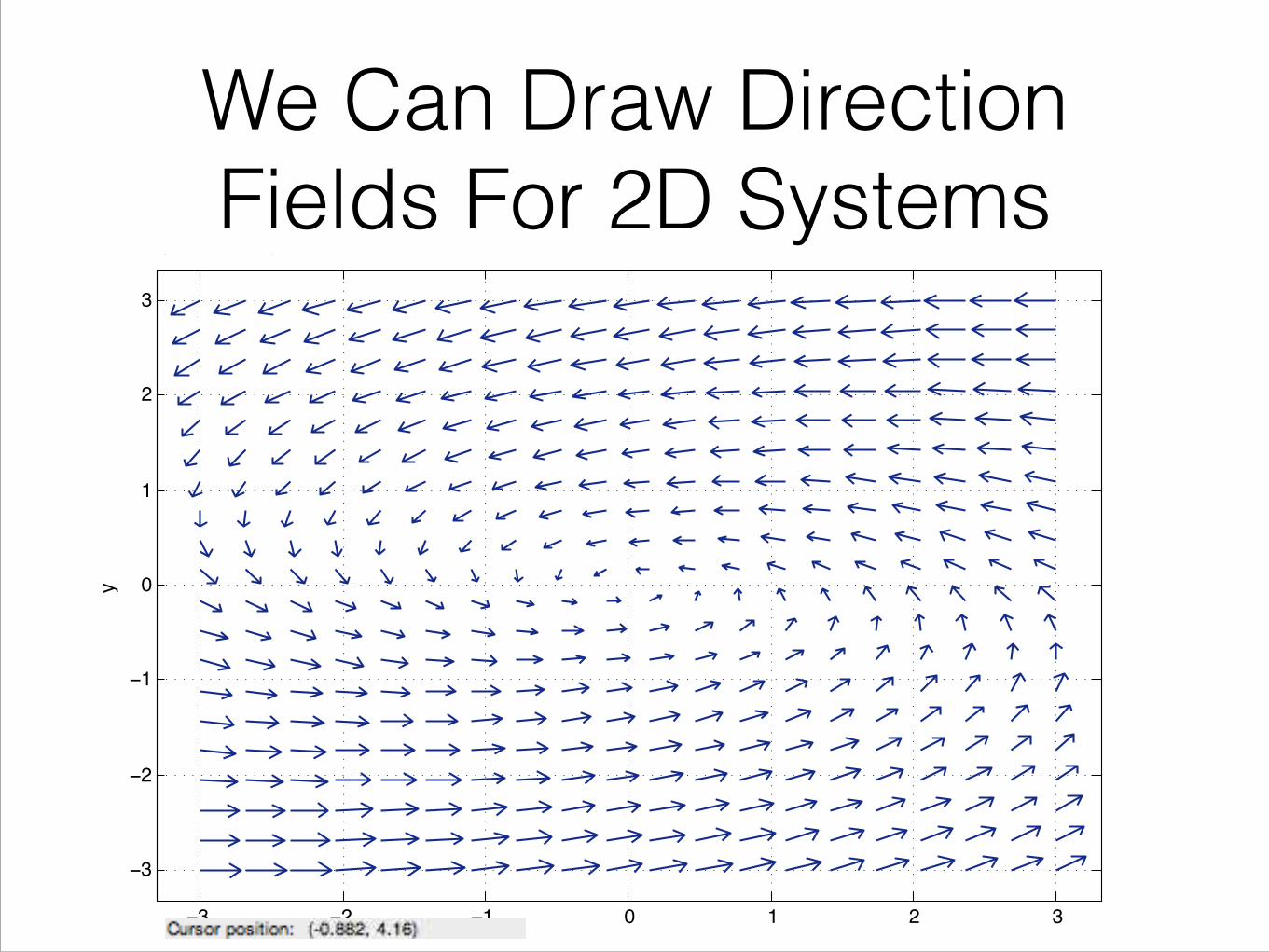
x ’ = − 1 x − 4 yy ’ = 1 x − 1 y
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
yWe Can Draw Direction Fields For 2D Systems
We Can Draw Direction Fields For 2D Systems
x ’ = − 1 x − 4 yy ’ = 1 x − 1 y
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y

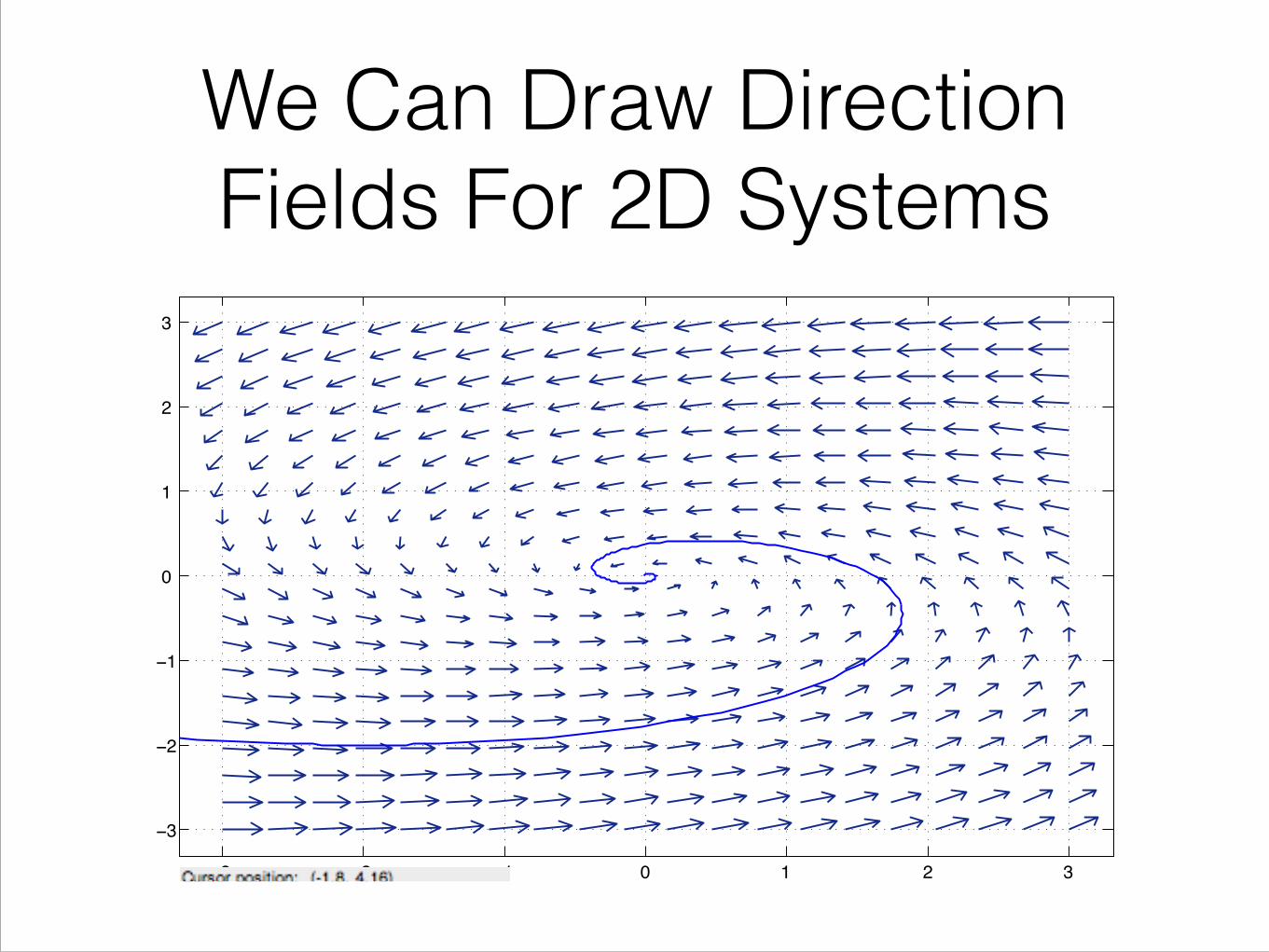
A Plot With Many Solutions Is Called a “Phase Portrait”x ’ = − 1 x − 4 y
y ’ = 1 x − 1 y
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y

Phase Portraits Give Us An Idea of How Solution Behavesx ’ = − 1 x − 4 y
y ’ = 1 x − 1 y
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y

Summary
• Can Use Euler’s Formula To Get General Solutions To Systems of Equations With Complex Eigenvalues
• Can Use Phase Portraits To Examine The Behavior Of Different Systems
Questions?
Top Related