







Languages
Pages
Legal

1
Chapter 16
Wave Motion
Prof. Raymond Lee,revised 11-21-2010

2
• Types of waves
• 2 main types of waves
• Mechanical waves
• A physical medium is disturbed
• Wave is propagation of disturbance throughthe medium
• Examples: sound, water waves
• Electromagnetic waves
• No medium required
• Examples: light, radio waves, x-rays

3
• General wave features
• In wave motion, energy is transferred overa distance
• Matter isn’t transferred over a distance
• All waves carry energy, but amount &mechanism of energy transport differ

4
• Mechanical wave requirements
• Some source of disturbance
• Medium that can be disturbed
• A physical mechanism via which medium’selements can influence each other

5
• Pulse on a rope
• Wave is generated byflicking 1 end of rope,which is under tension
• A single bump (or pulse)forms & travels along rope
(compare Fig. 16-1,p. 414)
6
• Pulse on a rope, 2
• Rope is medium via which pulse travels
• Pulse has definite height & propagationspeed within medium
• Continually flicking rope ! periodicdisturbance in form of a wave
7
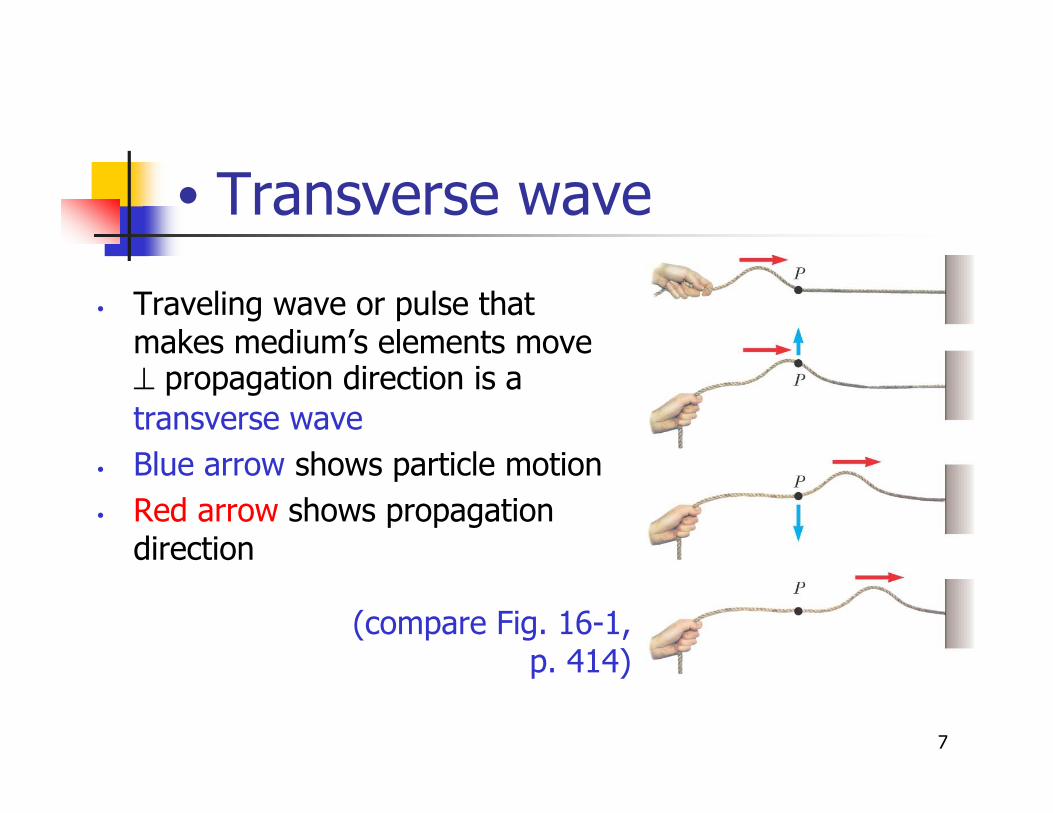
• Transverse wave
• Traveling wave or pulse thatmakes medium’s elements move" propagation direction is a
transverse wave
• Blue arrow shows particle motion
• Red arrow shows propagationdirection
(compare Fig. 16-1,p. 414)

8
• Longitudinal wave
• Longitudinal wave makes disturbed medium’s elements
move || propagation direction
• Here, coils’ displacement || to propagation direction
(compare Fig. 16-2, p. 414)
9
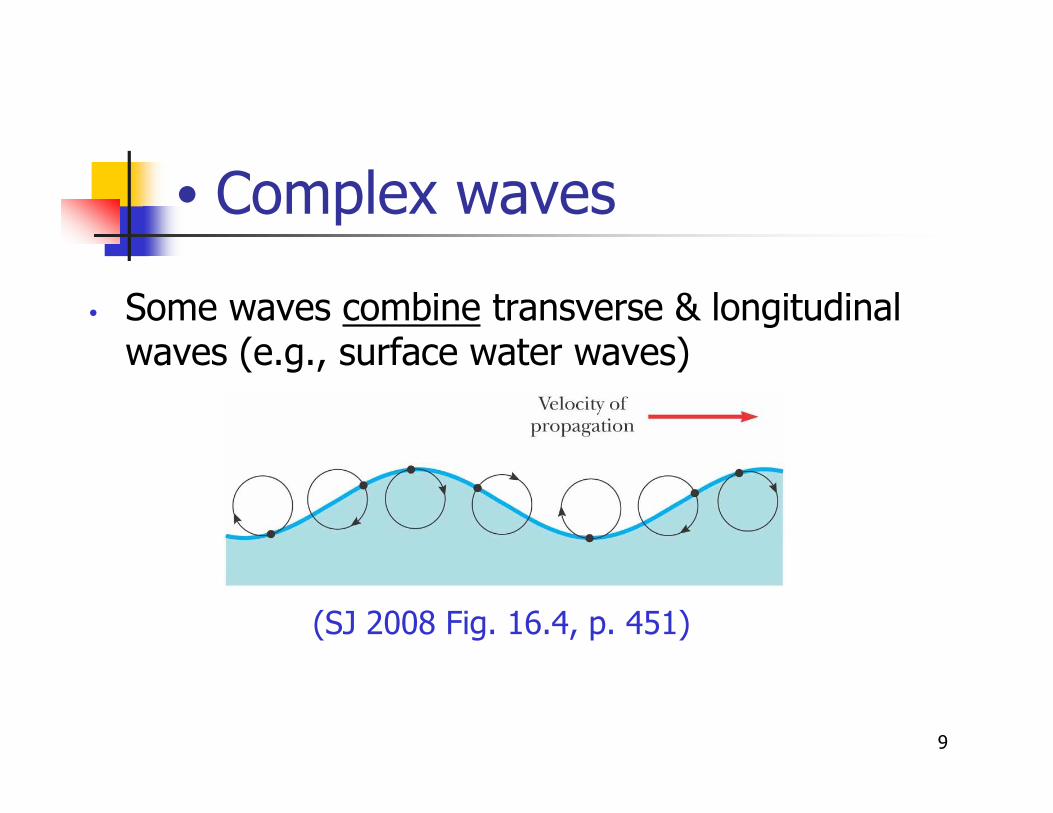
• Complex waves
• Some waves combine transverse & longitudinalwaves (e.g., surface water waves)
(SJ 2008 Fig. 16.4, p. 451)
10
• Example: Earthquake waves
• P (or primary) waves
• Fastest, at 7–8 km/s• Longitudinal
• S (or secondary) waves
• Slower, at 4–5 km/s• Transverse
• Seismograph records waves & helps determineinformation about earthquake’s place of origin

11
• Traveling pulse
• Pulse shape at t = 0 isshown
• Represent shape by y(x,0)= f (x), which gives stringelements’ transverse ypositions for all x at t = 0
(compare Fig. 16-4, p. 415)

12
• Traveling pulse, 2
• Pulse speed = v
• At time t, pulse hastraveled a distance vt
• Pulse’s shape doesn’tchange, but its position isnow y = f (x–vt)
• So at time t, y(x=0) equalsy(t=0) at a distance vt toleft of x=0 at t=0
(compare Fig. 16-4, p. 415)

13
• Traveling pulse, 3
• For pulse traveling to right, y(x, t) = f (x – vt)
• For pulse traveling to left, y(x, t) = f (x + vt)
• Function y also called wave function y(x,t)
• y(x,t) represents y coordinate (or transverseposition) of an element at position x at time t
• For fixed t, y(x,t) is called waveform & itdefines a curve that is pulse’s geometricshape at t
14
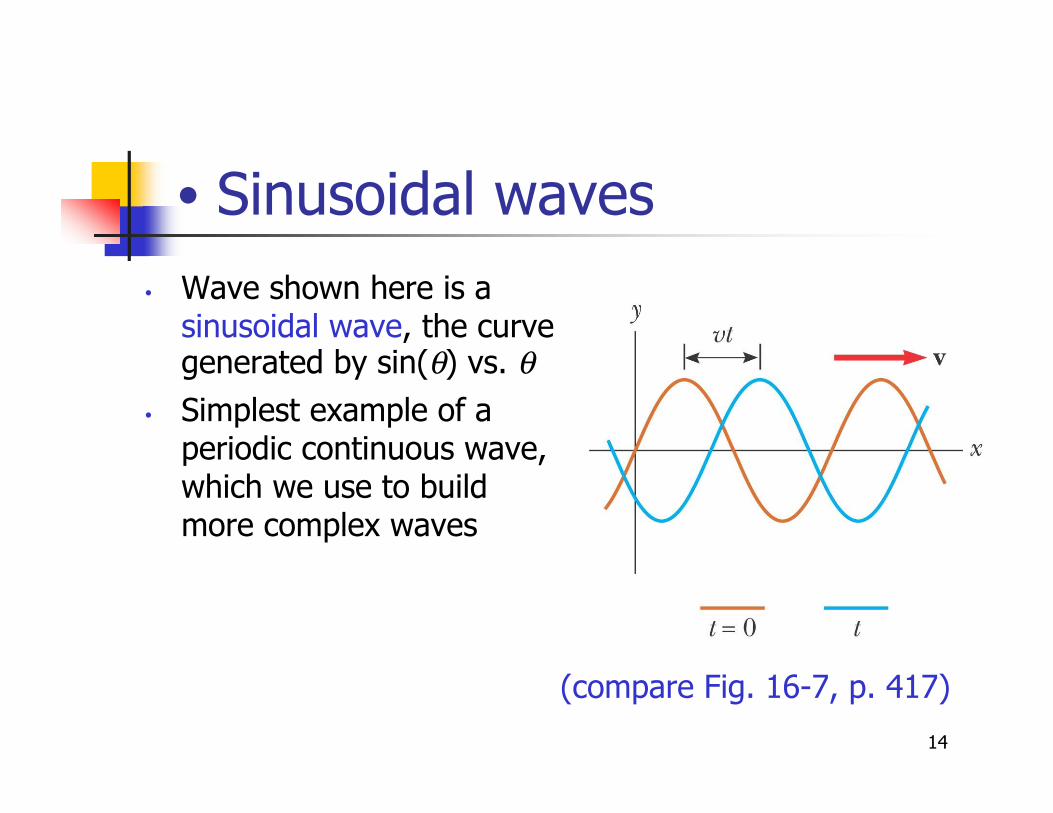
• Sinusoidal waves
• Wave shown here is asinusoidal wave, the curvegenerated by sin(!) vs. !
• Simplest example of aperiodic continuous wave,which we use to buildmore complex waves
(compare Fig. 16-7, p. 417)

15
• Sinusoidal waves, 2
• Wave moves to the right• In last figure, brown wave is initial position
• As wave travels rightward, it eventually gets toblue curve’s position
• Each element moves up & down in SHM
• Distinguish between wave’s motion & motionof medium’s particles

16
• Terminology: A & #
• Wave’s crest is where anelement has its maximumdisplacement (amplitudeA) from normal position
• Wavelength " is distancebetween adjacent crests
(compare Figs. 16-4 & 16-5, pp. 415-416)

17
• Terminology: # & T
• More generally, " is minimum distancebetween any 2 identical points onadjacent waves
• Period T is time interval required for 2identical points of adjacent waves topass by a point• Wave T is same as T for SHM of 1 element
in the medium
18
• Terminology: ƒ
• Frequency ƒ = # of crests (or any point onwave) passing given point in unit time
interval (typical ƒ units = 1/sec = Hz)
• Wave ƒ is same as ƒ for SHM of 1 element inthe medium
• ƒ & T are related by ƒ = 1/T (Eq. 16-9, p. 416)

19
• Wave speed
• Waves travel with speed determined byproperties of medium being disturbed
• Wave function is given by:
for a rightward-moving wave. For a leftward-moving wave, replace x–vt with x+vt
(Eq. 16-2, p. 415)

20
• Alternative wave function
• Since speed is distance/time, v = "/T
• Then rewrite wave function as:
• This form shows y’s periodic nature
(see Eq. 16-2,p. 415)

21
• Wave equations (on pp. 415-417)
• Define angular wave number k $ 2%/# (Eq. 16-5)
• Rewrite angular frequency & $ 2%/T (Eq. 16-8)
• Then write wave function as y = A sin(kx–#t) {Eq.
16-2} & wave speed v = "ƒ {Eq. 16-13}
• If y ! 0 at t = x = 0, generalized wave function isy = A sin (kx – #t + $) {Eq. 16-10}, with phaseconstant $
22
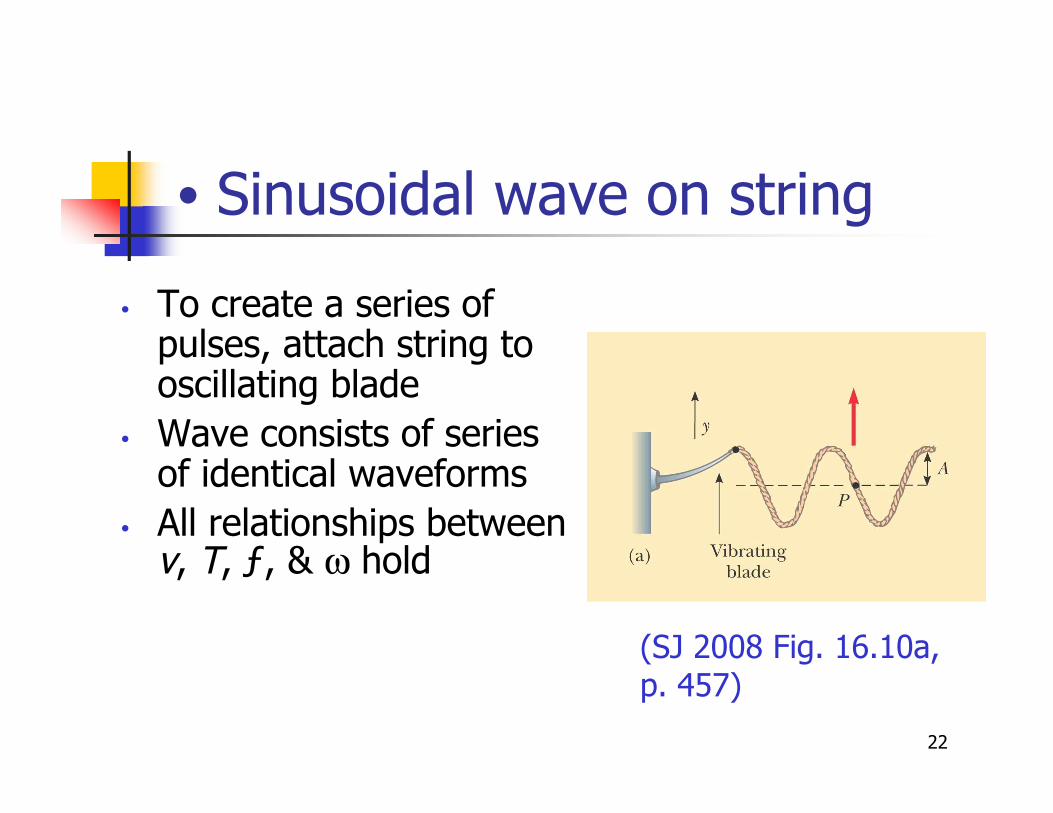
• Sinusoidal wave on string
• To create a series ofpulses, attach string tooscillating blade
• Wave consists of seriesof identical waveforms
• All relationships betweenv, T, ƒ, & & hold
(SJ 2008 Fig. 16.10a,p. 457)
23
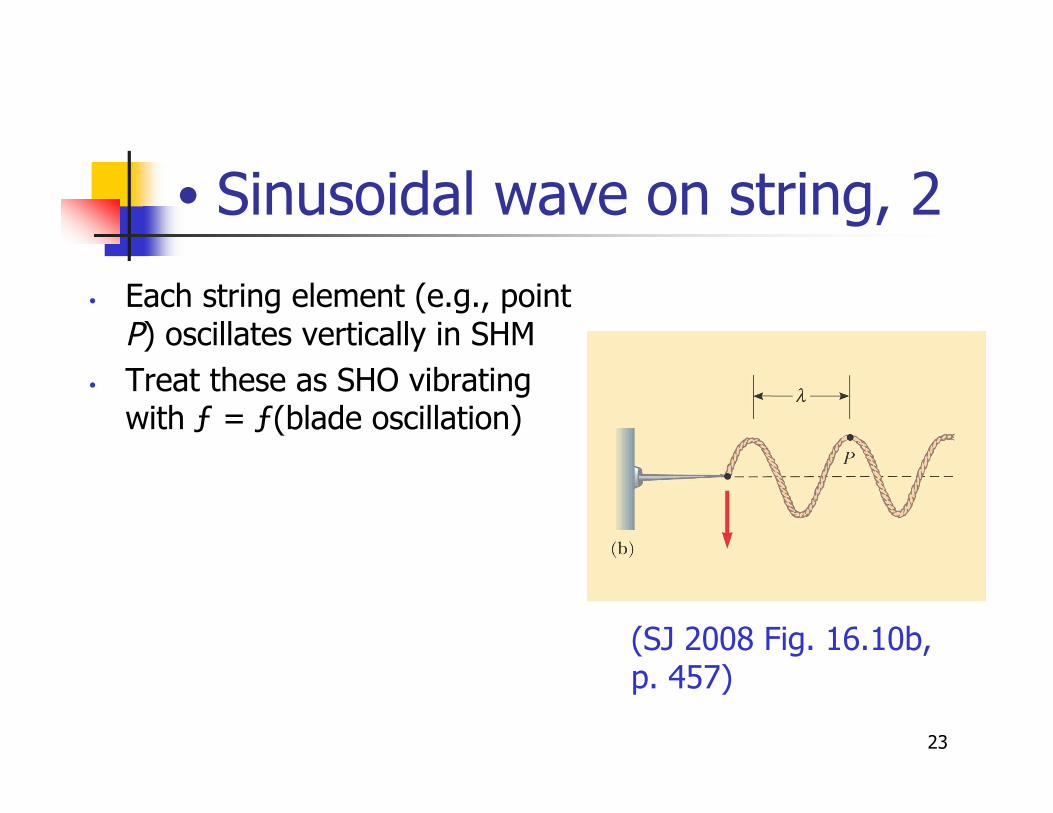
• Sinusoidal wave on string, 2
(SJ 2008 Fig. 16.10b,p. 457)
• Each string element (e.g., pointP) oscillates vertically in SHM
• Treat these as SHO vibratingwith ƒ = ƒ(blade oscillation)
24
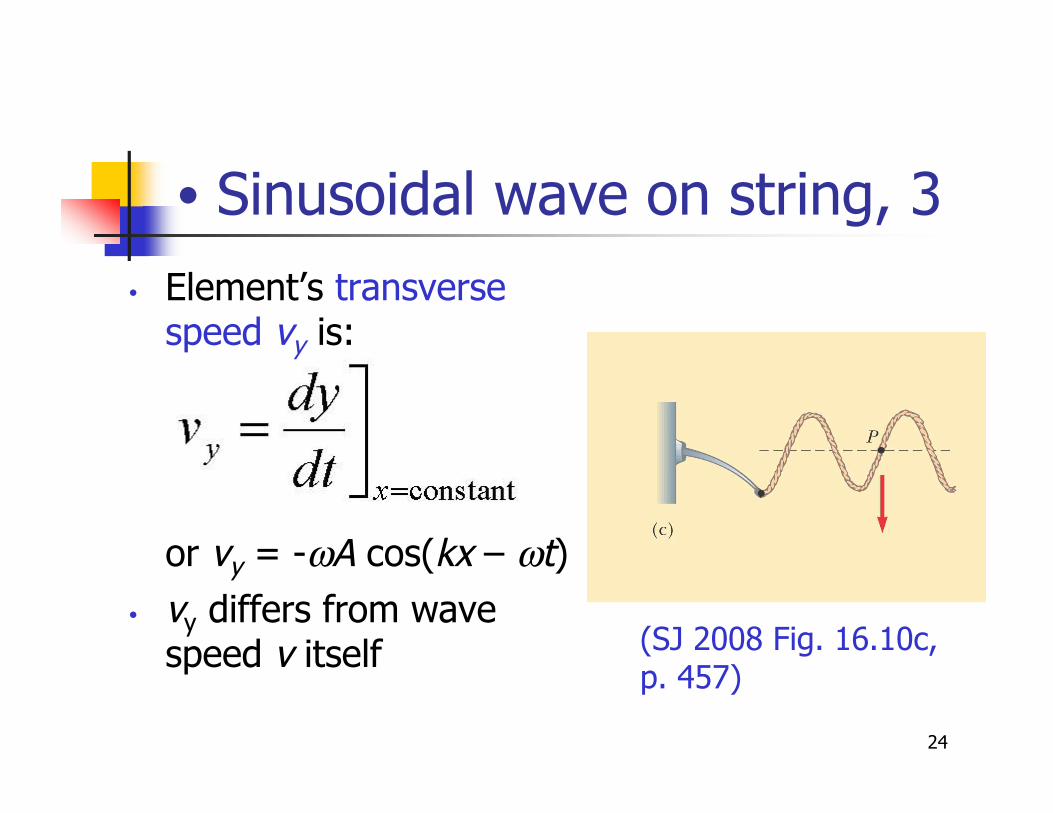
• Sinusoidal wave on string, 3
• Element’s transversespeed vy is:
or vy = -#A cos(kx – #t)
• vy differs from wavespeed v itself (SJ 2008 Fig. 16.10c,
p. 457)
25
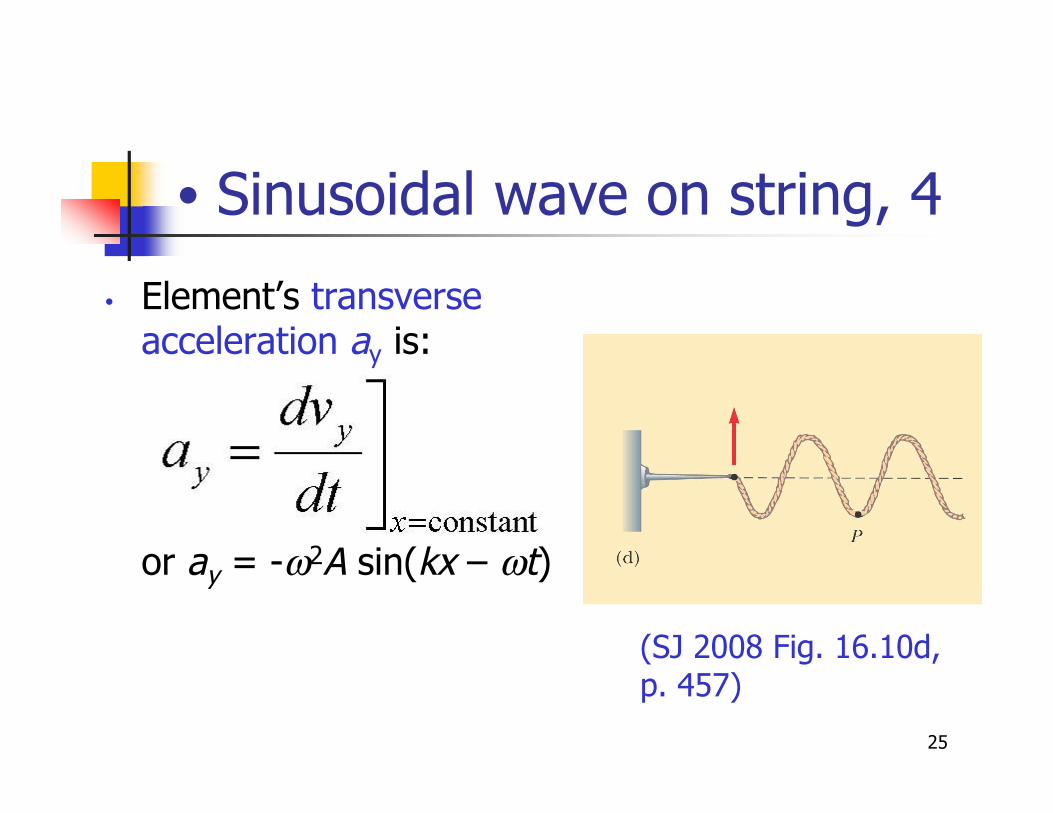
• Sinusoidal wave on string, 4
• Element’s transverseacceleration ay is:
or ay = -#2A sin(kx – #t)
(SJ 2008 Fig. 16.10d,p. 457)

26
• Sinusoidal wave on string, 5
• vy & ay maxima are:• vy, max = #A (SJ 2008 Eq. 16.16, p. 457)
• ay, max = #2A (SJ 2008 Eq. 16.17, p. 457)
• vy & ay maxima don’t occur simultaneously:• v maximum at y = 0
• a maximum at y = ±A

27
• v depends on (1) string’s physicalcharacteristics & (2) string tension T
for µ $ linear mass density (= mass/length)
• Eq. 16-26 assumes:(1) pulse doesn’t affect T(2) no particular pulse shape
• Wave speed on a string
(Eq. 16-26, p. 421)

28
• Energy in string waves
• Waves transport energy in propagatingthrough a medium
• Model each string element as a SHOwith oscillation in y-direction
• Each element has same total energy

29
• Energy in string waves, 2
• Each element has mass = 'm
• Each 'm’s KE is 'K = 1/2('m)vy2
• Now 'm = µ'x for µ $ linear mass density
• As string element 'x ! 0, above equationbecomes dK = 1/2(µdx)vy
2

30
• Energy in string waves, 3
• Integrating over all elements, total KE in 1wavelength is K" = (1/4)µ#2A2" (compare Eq. 16-29, p. 422)
• Total PE in 1 wavelength is U" = (1/4)µ#2A2"
• So total ME of E" = K" + U" = (1/2)µ#2A2"(units: (kg/m)*(m/s)2*m = kg*m2/s2 = J)
• Next consider wave power "E/"t as opposed towave energy ...
31
• Wave power
• Power is rate at which energy is transferred:
• Thus sinusoidal wave transfers power (:&2, A2, & wave speed v
(Eq. 16-33,p. 423)
32
Waves vs. particles
Multiple waves cancombine at a point insame medium – canexist at same location
Multiple particles canexist only at differentlocations
Waves have acharacteristic size –their #
Particles have 0 size

33
• Superposition principle
• If # 2 traveling waves move through amedium, wave function’s resultant at a point= algebraic sum of individual wave functions
• Waves obeying this superposition principle arelinear waves (for mechanical waves, linear
waves’ amplitudes « their #s)

34
• Superposition & interference
• 2 traveling waves can pass through each otherw.o. being destroyed or altered, a result ofsuperposition principle
• Interference: Combining separate waves insame region of space to ! resultant wave

35
• Superposition
• 2 pulses travel in opposite directions
• y1 is wave function of right-moving pulse; y2 is thatof left-moving pulse
• Pulses have same v but different shapes; eachelement’s displacement > 0
(compare Fig. 16-11, p. 425)
36
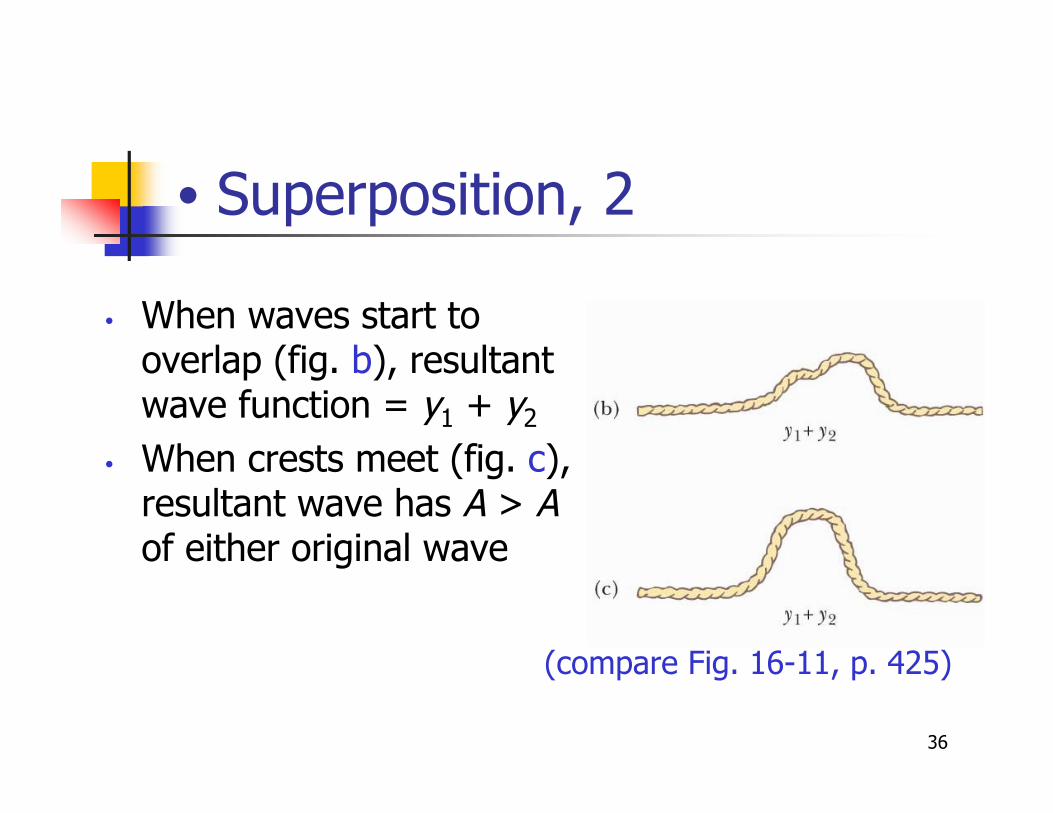
• Superposition, 2
• When waves start tooverlap (fig. b), resultantwave function = y1 + y2
• When crests meet (fig. c),resultant wave has A > Aof either original wave
(compare Fig. 16-11, p. 425)
37
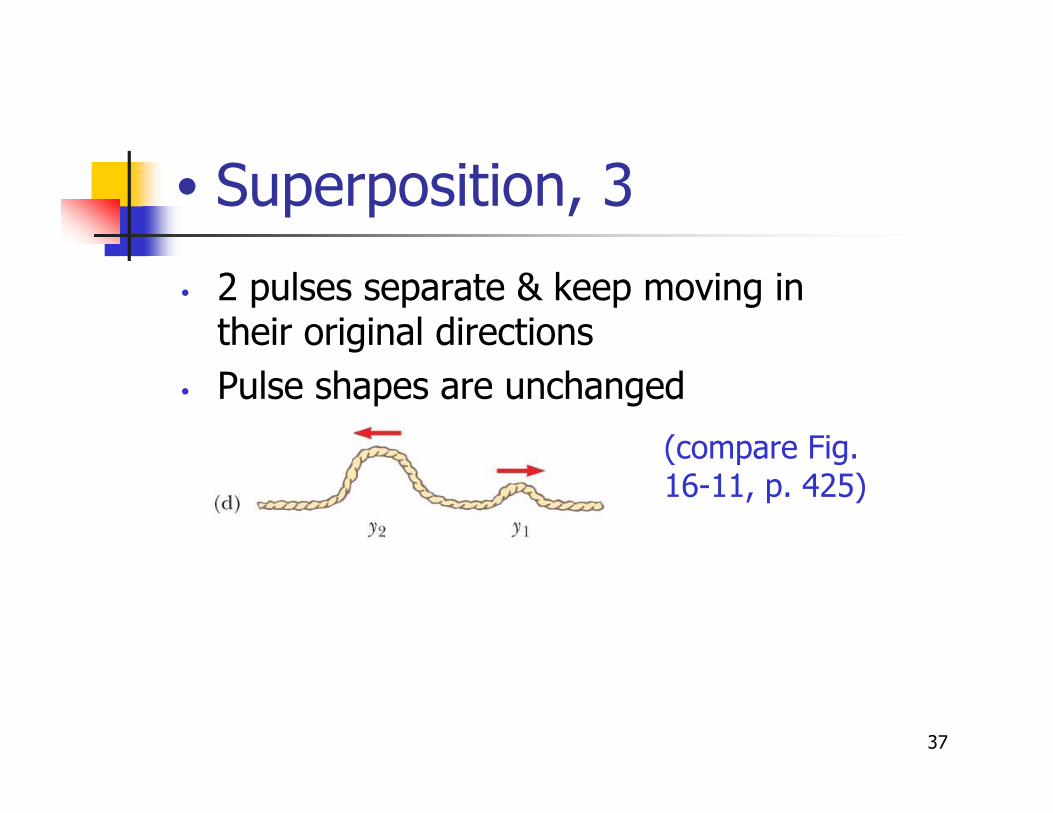
• Superposition, 3
• 2 pulses separate & keep moving intheir original directions
• Pulse shapes are unchanged
(compare Fig. 16-11, p. 425)

38
• Superposition in stretched spring
• 2 equal, symmetric pulsesthat travel in oppositedirections along stretchedspring obey superpositionprinciple
(SJ 2004 Fig. 18.1e)
time)

39
• Types of interference
• Constructive interference: 2 pulses’displacements are in same direction• Resultant pulse’s A > A of either individual pulse
• Destructive interference: 2 pulses’displacements are in opposite directions• Resultant pulse’s A < A of either individual pulse

40
• Destructive interference
• 2 pulses travel in oppositedirections
• Displacements are invertedw.r.t. each other
• When pulses overlap (fig.c), displacements partiallycancel each other
(SJ 2008 Fig. 18.2, p. 502)
41
• Superposition of sinusoidal waves
• Assume 2 waves travel in samedirection with the same &, #, & A
• But, waves differ in phase
• y1 = A sin(kx - #t) (Eq. 16-47, p. 425)
• y2 = A sin(kx - #t + $) (Eq. 16-48, p. 425)
• y = y1+y2 (Eq. 16-51, p. 426)
= 2A cos($/2) sin(kx - #t + $/2)

42
• Superposition of sinusoidal waves, 2
• Resultant wave function y is alsosinusoidal
• y has same & & # as original waves
• Resultant wave’s amplitude =2Acos($/2) & its phase = $/2

43
• Sinusoidal waves with constructive
interference
• If $ = 0 or an even multiple of %,then cos($/2) = 1
• Resultant wave amplitude = 2A• Crests of 1 wave coincide
with crests of other wave
• Waves are in phaseeverywhere & interfereconstructively
(compare Fig. 16-13, p. 426)

44
• Sinusoidal waves with destructiveinterference
• When $ = any odd multiple of %,then cos($/2) = 0
• Resultant wave’s amplitude = 0• Crests of 1 wave coincide with
troughs of other wave
• Waves interfere destructively
(compare Fig. 16-13, p. 426)

45
• Sinusoidal waves, general interference
• When $ is other than 0or integer multiple of %,
get 0 < Aresultant < 2A
• Wave functions still add
(compare Fig. 16-13, p. 426)
46
• Summary: Sinusoidal wave interference
• Constructive interference occurs when phasedifference $ = 0 or any even multiple of %• Resultant’s amplitude Aresultant = 2Acos($/2) = 2A
• Destructive interference occurs when$ = any odd multiple of %• Aresultant = 2Acos($/2) = 0
• General interference occurs when0 < $ < n% for integer n• Aresultant is 0 < Aresultant < 2A
47
• Standing waves
• Assume 2 waves with same &, #, & Atravel in opposite directions in a medium
• y1 = A sin(kx – #t) & y2 = A sin(kx + #t)
• Waves interfere according to superpositionprinciple

48
• Standing waves, 2
• Resultant is y = 2A sin(kx)cos(#t)(Eq. 16-60, p. 431)
• ! Wave function of standing wave (nokx–#t term since not a traveling wave)
• While y = f (t) everywhere sin(kx) ! 0,at any time t, ymax = 2A cos(#t) is nolonger a f (x) {i.e., a standing wave}
• Standing wave ! no apparent motion inoriginal waves’ propagation directions
(SJ 2008 Fig. 18.6, p. 505)
49
• Note on amplitudes
• Use 3 A types to describe standingwaves• Individual waves’ A
• SHM A for medium’s elements, 2A sin(kx)
• Standing-wave amplitude, 2A• standing-wave elements vibrate within
constraints of envelope function 2A sin(kx),where x is an element’s position in medium

50
• Standing waves, particle motion
• Each element in medium oscillates inSHM with same frequency #
• However, A of SHM depends onelement’s location within medium

51
• Standing-wave definitions
• Nodes occur wherever A = 0 (i.e., xpositions s.t. x = n#/2 for n = 0, 1, 2, 3, ...)(Eq 16-62, p. 432)
• Antinodes occur at maximum displacements2A (i.e., at x = n#/4 for n = 1, 3, 5, ...)(Eq. 16-64, p. 432)
• Distance between adjacent: antinodes = "/2,
nodes = "/2, node & adjacent antinode = "/4

52
• Nodes & antinodes
• Above: standing-wave patterns produced by 2waves of equal A traveling in opposite directions
• In standing wave, medium’s elements alternatebetween extremes shown in (a) & (c)
(compareFig. 16-16,
p. 431)
53
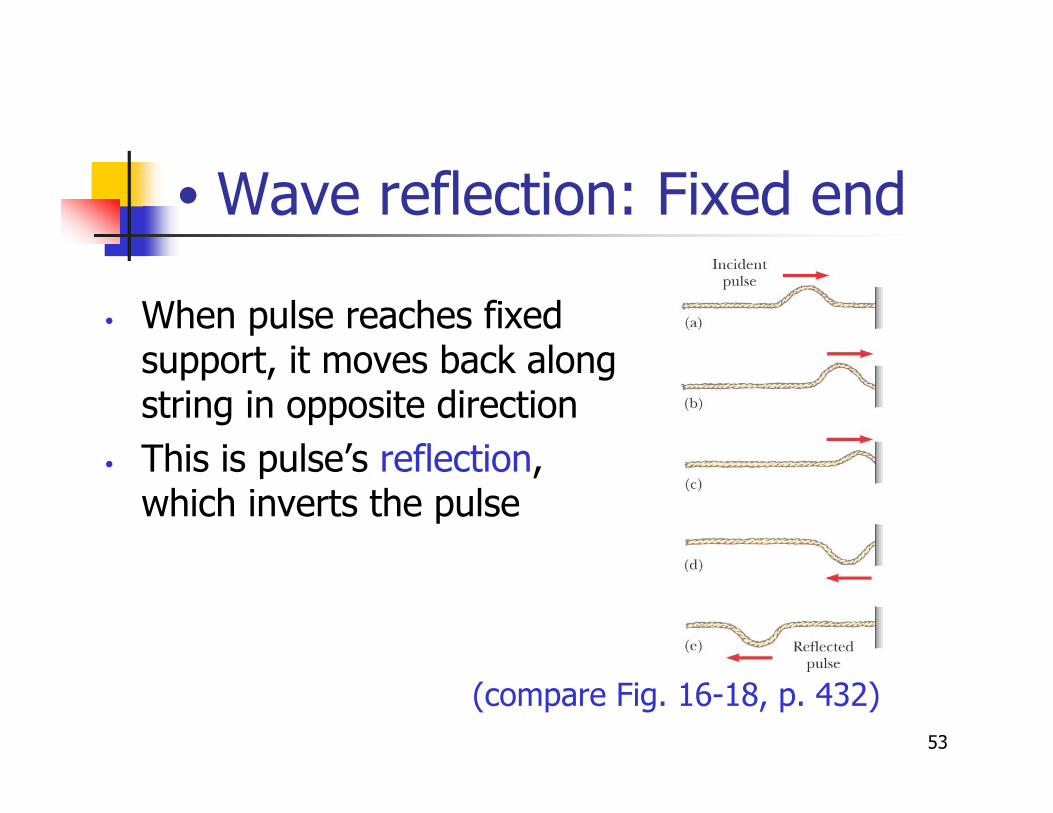
• Wave reflection: Fixed end
• When pulse reaches fixedsupport, it moves back alongstring in opposite direction
• This is pulse’s reflection,which inverts the pulse
(compare Fig. 16-18, p. 432)

54
• Wave reflection: Free end
• With a free end,string is free tomove vertically
• Pulse is reflectedbut not inverted
(compare Fig. 16-18, p. 432)
55
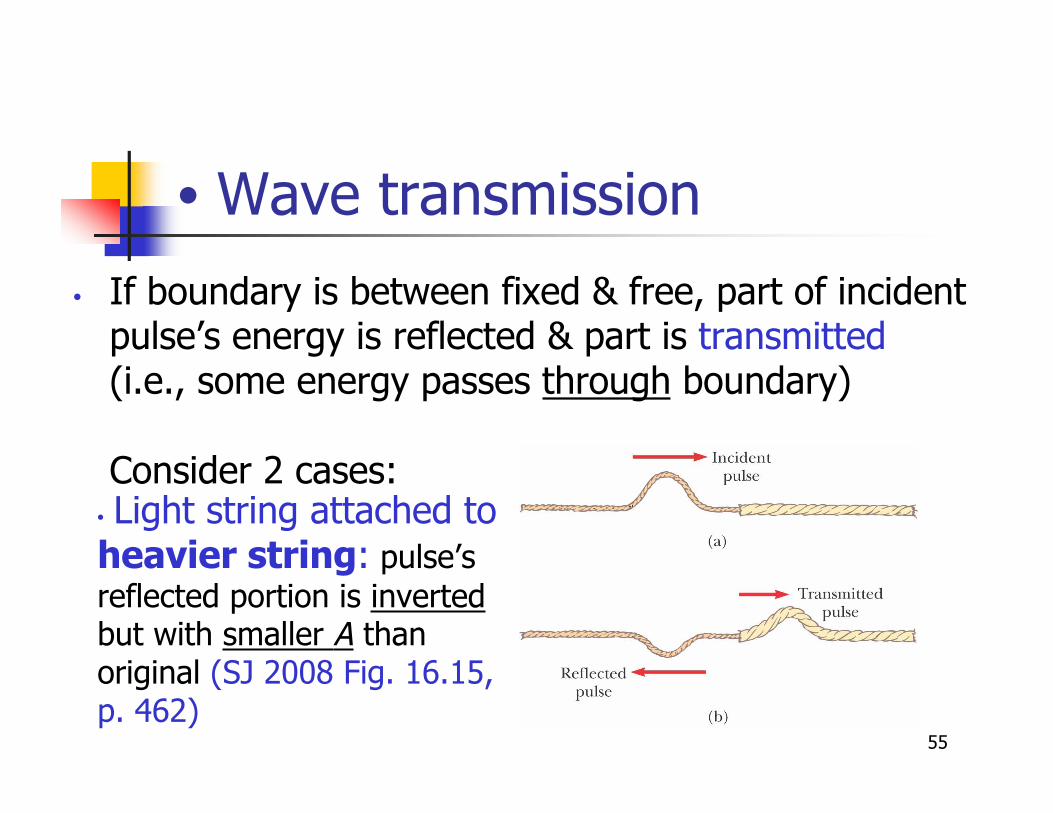
• Wave transmission
• If boundary is between fixed & free, part of incidentpulse’s energy is reflected & part is transmitted(i.e., some energy passes through boundary)
Consider 2 cases:• Light string attached toheavier string: pulse’s
reflected portion is invertedbut with smaller A thanoriginal (SJ 2008 Fig. 16.15,p. 462)

56
• Wave transmission, 2
• Heavier string attachedto light string: pulse’s
reflected portion is not inverted(SJ 2008 Fig. 16.16, p. 462)

57
• Wave transmission, 3
• Energy conservation governs pulse:If boundary breaks up a pulse intoreflected & transmitted parts, sum oftheir energies = original pulse’s energy
58
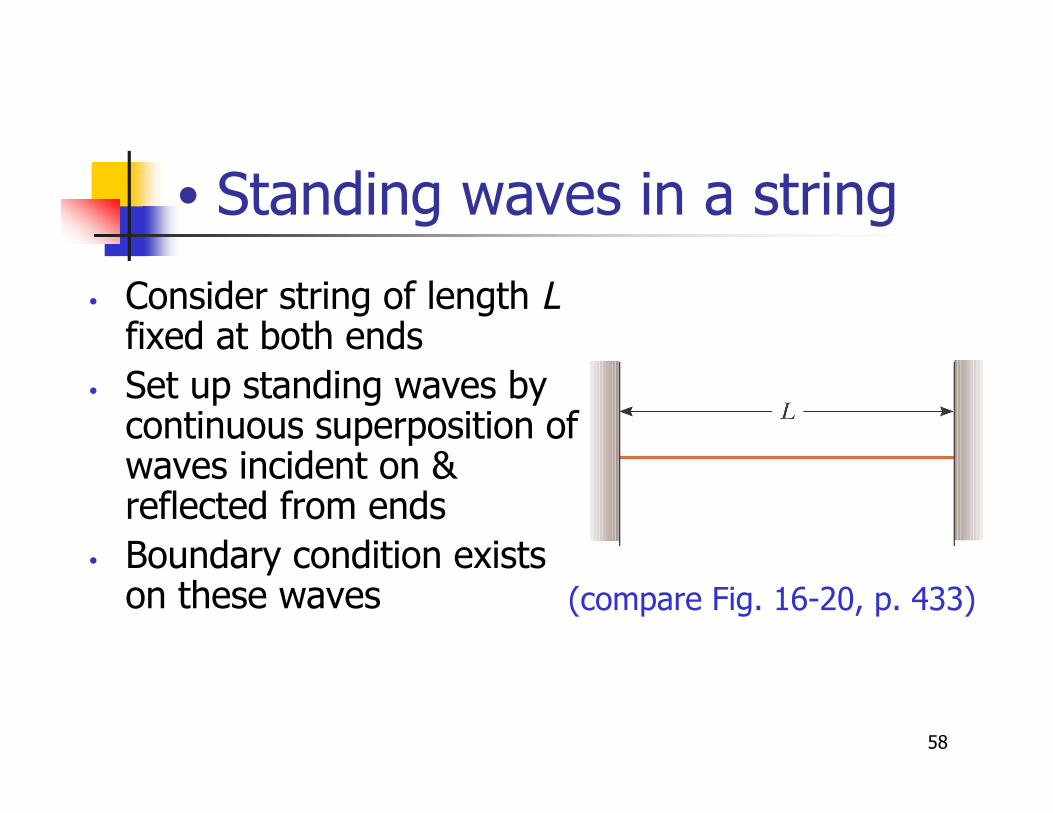
• Standing waves in a string
• Consider string of length Lfixed at both ends
• Set up standing waves bycontinuous superposition ofwaves incident on &reflected from ends
• Boundary condition existson these waves (compare Fig. 16-20, p. 433)
59
• Standing waves in a string, 2
• Strings ends are necessarily nodes, since they’refixed & * have 0 displacement
• This boundary condition ! string having a set ofnormal modes of vibration:• Each mode has characteristic ƒ
• String’s normal oscillation modes follow from imposingrequirements that (1) string ends are nodes &(2) nodes & antinodes are separated by "/4

60
• Standing waves in a string, 3
• First normal modeconsistent with boundaryconditions
• Nodes at both ends & 1antinode in middle
• Longest wavelength mode,
so 1/2" = L or " = 2L
(1st harmonic)(compare Fig. 16-20, p. 433)
61
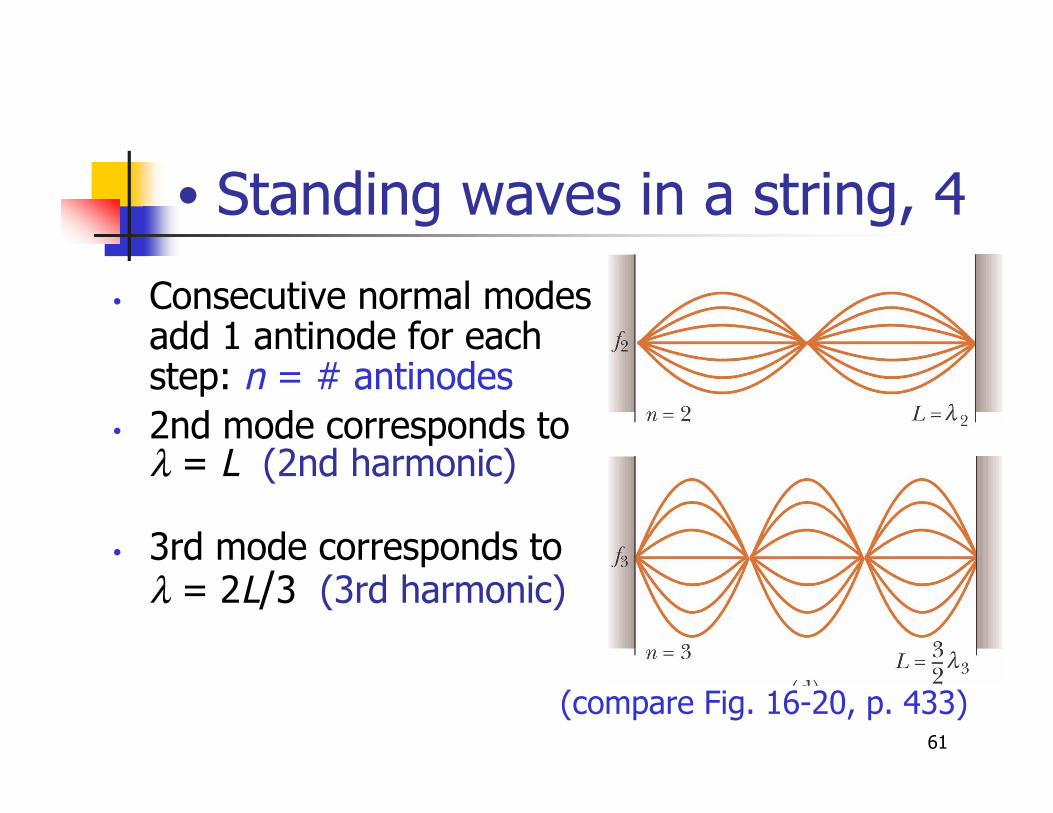
• Standing waves in a string, 4
• Consecutive normal modesadd 1 antinode for eachstep: n = # antinodes
• 2nd mode corresponds to" = L (2nd harmonic)
• 3rd mode corresponds to" = 2L/3 (3rd harmonic)
(compare Fig. 16-20, p. 433)

62
• Standing waves in a string, 5
• Normal-mode " for string of length L fixed
at both ends: "n = 2L/n for n = 1, 2, 3, …
• n is nth normal mode of oscillation
• Above defines all possible modes for string
• Corresponding natural ƒ are:
(Eqs. 16-66, p. 434& 16-26, p. 421)

63
• Resonance
• System can oscillate in # 1 normalmodes
• If we apply a periodic F to thissystem, then resulting motion’samplitude is greatest whenapplied F’s & = &0 (a systemnatural &)
• Since oscillating system has largeA when driven at any of its &0,call such ƒ the system’s resonancefrequencies ƒ0
• System friction limits Amax
(SJ 2004 Fig. 18.14,p. 558)
64
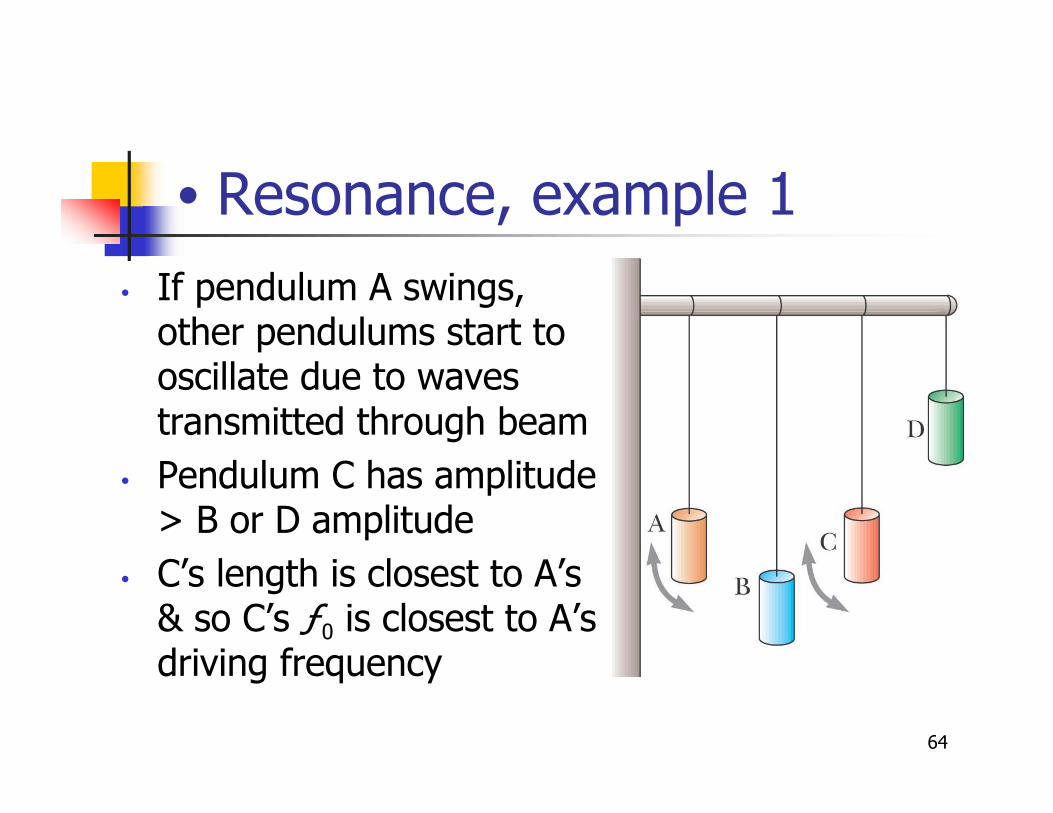
• Resonance, example 1
• If pendulum A swings,other pendulums start tooscillate due to wavestransmitted through beam
• Pendulum C has amplitude> B or D amplitude
• C’s length is closest to A’s& so C’s ƒ0 is closest to A’sdriving frequency

65
• Resonance, example 2
• Set up standing waves in astring if 1 end is connectedto a vibrating blade
• When blade vibrates at astring’s ƒ0, large-amplitudestanding waves result
(SJ 2008 Fig. 18.12, p. 512)
Top Related