






Languages
Pages
Legal


Amplificatoare şi convertoare de măsurare
131
Capitolul V CONVERTOARE ANALOG-NUMERICE – ADC
V.1. CARACTERISTICA DE TRANSFER A UNUI ADC
Conversia analog-numerică – A/D, constă în exprimarea valorii unei mărimi printr-un număr. Mărimea fizică care se pretează cel mai bine conversiei A/D, ca de altfel tuturor prelucrărilor de semnale pe cale electronică, este tensiunea electrică. Ca urmare, celelalte mărimi electrice sau neelectrice, trebuie convertite mai întâi în tensiune şi apoi A/D. La fel ca în cazul DAC şi ADC au nevoie de o tensiune de referinţă – cel puţin din motive dimensionale, cu care este comparată tensiunea de intrare, rezultatul comparaţiei fiind chiar numărul căutat – reprezentând mărimea de ieşire. Relaţia care descrie funcţia de transfer a unui ADC, este următoarea:
rx VvN = sau rx NVv = , (V.1) în care N este un număr fracţionar binar, cu forma binecunoscută:
∑=
=
−=ni
1i
ii 2aN unde { }1 ,0i ∈a , (V.2)
reprezintă biţii codului numeric de ieşire – a1, a2, …, an. Valoarea maximă a numărului N se obţine când 1 , i =∀ ai :
nni
1i
imax 212 −
=
=
− −==∑N (V.3)
şi ca urmare: ( ) r
nxmax 21 Vv −−= . (V.4)
Două valori consecutive ale tensiunii vx diferă între ele cu cantitatea:
rn2 Vq −= , (V.5)
interval de tensiune care se numeşte cuanta procesului de discretizare şi reprezintă aproximaţia cu care este valabilă (V.1). Ca urmare, intervalul de variaţie al tensiunii de intrare este împărţit în 2n intervale de cuantificare cu lăţimea q. Toate valorile vx aflate în acelaşi interval de cuantificare vor primi acelaşi cod numeric, chiar dacă aceste valori sunt diferite între ele. Plecând de la aceste premize, un ADC de 3 biţi poate fi realizat conform schemei reprezentate în Fig.V.1.

V. Convertoare analog-numerice
132
U1
Vr
R
R
R
R
R
R
R
R
U3
U5
U7
U2
U4
U6
a3
a2
a1
vx
(7/8)Vr
(6/8)Vr
(5/8)Vr
(4/8)Vr
(3/8)Vr
(2/8)Vr
(1/8)Vr
CO
DIF
ICA
TOR
Fig.V.1. Principiul de funcţionare al unui ADC de 3 biţi.
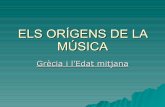
Din Fig.V.1, se observă că schema prezentată permite implementarea (V.1) cu precizarea (V.2). Astfel, ADC este constituit din 7 comparatoare – U1-U7, cărora li s-au fixat praguri cu valorile (1/8)V, (2/8)V, …, (7/8)V şi dintr-un codificator care formează un cod numeric binar egal în valoare cu numărul de comparatoare acţionate. Caracteristica de transfer corespunzătoare acestui ADC este reprezentată în Fig.V.2. În Fig.V.2.a diferenţa dintre caracteristica de transfer ideală şi reală poate atinge valoarea maximă de −1 LSB, adică eroarea de cuantificare este cuprinsă în intervalul [0, −1 LSB]. Pentru o eroare de cuantificare simetrică este necesară introducerea în schema ADC a unei deplasări a pragurilor comparatoarelor cu 1/2 LSB, echivalent cu 1/16 Vr, rezultatul fiind cel ilustrat în Fig.V.2.b. Concret, acest rezultat se poate obţine dacă rezistenţa care fixează pragul de 1/8 Vr are valoarea R/2, în loc de R. În acest caz, eroarea de cuantificare se încadrează în intervalul [−1/2 LSB, +1/2 LSB]. Rezoluţia unui ADC reprezintă variaţia mărimii de intrare care produce o schimbare între două valori consecutive, a codului numeric de ieşire. Ca şi în cazul DAC, rezoluţia este egală cu vmax/2n, unde vmax reprezintă limita superioară a intervalului de variaţie a mărimii analogice de intrare, iar n – numărul de biţi ai codului numeric de ieşire. Prin urmare, rezoluţia poate fi exprimată în milivolţi, având valoarea egală cu cuanta procesului de cuantificare – q (V.5), în procente din capăt de scală – FS sau în număr de biţi.

V.2. ADC cu funcţionare paralel
133
−LSBvx
0
∆vx
(a)
vx0
−LSB/2
+LSB/2∆vx
(b)
81
82
83
84
85
86
rV87×
111110101100011010001000 vx
COD
82
83
84
85
86
rV87×
81
111110101100011010001000
COD
vx
IDEAL REAL IDEAL REAL
Fig.V.2. Caracteristica de transfer a unui ADC de 3 biţi: (a) – caracteristică necentrată şi eroarea corespunzătoare;
(b) – caracteristică centrată şi eroarea corespunzătoare.
V.2. ADC CU FUNCŢIONARE PARALEL
Există o mare varietate de principii şi metode de realizare a ADC, fiecare soluţie practică urmărind un compromis optim între două sau mai multe din criteriile: viteză, rezoluţie şi complexitate – determinantă pentru preţul de cost. Dintre toate tipurile, ADC cu funcţionare paralel sunt cele mai rapide. Principiul lor de funcţionare, indiferent de numărul de biţi, este cel prezentat în Fig.V.1. În acest caz, timpul de conversie este constituit din suma timpilor de răspuns ai comparatoarelor şi al porţilor din structura codificatorului. Utilizând circuite logice rapide (ECL, Schottky etc.) se pot realiza timpi de conversie reduşi, cum ar fi de ordinul a 8 ns pentru un ADC paralel de 4 biţi. Dezavantajul major al ADC paralel îl constituie complexitatea, determinată de numărul mare de rezistenţe, comparatoare şi porţi logice din schema de codificare. Din Fig.V.1 se poate deduce imediat că pentru realizarea unui asemenea ADC este necesar un număr de 2n rezistenţe, 2n−1 comparatoare şi un număr de porţi logice proporţional cu acelaşi ordin de mărime.

V. Convertoare analog-numerice
134
De exemplu, pentru un ADC de 8 biţi sunt necesare 28 – 1 = 255 comparatoare. Din cauza complexităţii care creşte exponenţial cu numărul de biţi, rezoluţia acestui tip de ADC este de regulă limitată la un număr de biţi care rareori depăşeşte valoarea 8. Un prim compromis între viteză, rezoluţie şi complexitate, îl reprezintă ADC cu funcţionare paralel-serie, conform schemei de principiu reprezentată în Fig.V.3.
+
-+
- UbVr
R
R
R
R
∞vx
CO
DIF
ICA
TOR−1
Ua
Vr
CO
DIF
ICA
TOR−2
R
R
R
R
∞R1
R1
R1
R1
R2
DA
C –
n/2
biţi
Un−1
Un−2
Un/2
Un/2−1
Un/2−2
U0
ADC-1 – n/2 biţi
LINIE DE ÎNTÂRZIERE
v1
ADC-2 – n/2 biţi
Fig.V.3. Principiului de funcţionare al unui ADC paralel-serie.
Un ADC paralel-serie de n biţi, cu n număr par, este constituit în principiu din două ADC paralel fiecare de n/2 biţi, conectate în serie printr-un artificiu de schemă. Astfel, conform Fig.V.3, primul ADC paralel este constituit din comparatoarele Un−1, Un−2, …, Un/2 şi codificatorul aferent, realizând o conversie A/D de n/2 biţi, cei mai semnificativi. Treapta de cuantificare în acest caz este vmax/2n/2. Codul numeric rezultat este aplicat unui DAC tot de n/2 biţi, care produce la ieşire o tensiune v1. Dacă DAC are aceeaşi rezoluţie în tensiune (vmax/2n/2), rezultă că valoarea tensiunii v1 poate diferi de tensiunea de intrare vx cu o cantitate cuprinsă între valoarea zero şi valoarea treptei de cuantificare. Ca urmare diferenţa dintre vx şi v1 va avea valoarea:
2nmax1x 20 vvv ≤−≤ . (V.6)
Această diferenţă de tensiune fiind amplificată de etajul Ub cu factorul R2/R1 = 2n/2, tensiunea de ieşire a acestuia se va situa în intervalul:
( ) max2n
max1
21x
1
2 20 vvRRvv
RR
=≤−≤ . (V.7)

V.3. ADC cu reacţie
135
Tensiunea de ieşire a etajului Ub este aplicată celui de al doilea ADC paralel, constituit din comparatoarele Un/2−1, Un/2−2, …, U0 şi codificatorul aferent, realizând o conversie de n/2 biţi, cei mai puţin semnificativi. Se poate deduce că în acest caz, timpul de conversie este cel puţin dublul timpului realizat de un ADC paralel de n biţi, în schimb se reduce substanţial complexitatea şi se păstrează rezoluţia de n biţi. De exemplu, pentru un ADC de 12 biţi, schema paralel necesită 212 – 1 = 4095 comparatoare, pe când schema paralel-serie necesită 2(26 – 1) = 126 comparatoare.
Un ADC paralel-serie poate avea o rată de conversie de 200 ns. Ponderea cea mai mare în timpul de răspuns o au etajele Ua şi Ub. Pentru a se asigura sincronizare de fază între tensiunile vx şi v1, efectul timpilor de propagare prin ADC-1 şi DAC se poate compensa cu o linie de întârziere, după cum este sugerat punctat în Fig.V.3.
V.3. ADC CU REACŢIE
Aceste tipuri de ADC includ de regulă în structura lor un DAC, cu ajutorul căruia codul numeric de ieşire este convertit analogic şi comparat cu tensiunea de intrare. Ca urmare, tensiunea de intrare nu mai este comparată cu 2n−1 tensiuni de referinţă, ci este comparată cu o tensiune proporţională cu codul numeric de ieşire.
V.3.1. ADC CU REACŢIE ŞI NUMĂRĂTOR
O soluţie simplă de realizare a unui ADC cu reacţie este reprezentată în Fig.V.4.
vx
t
vc
vx
vc
TC1 TC2
T0
(b)(a)
+
-
S
∞U
TACT
RQ
DAC
N
. . .. . .
P
B
vx
CO
DIEŞI
RE
vc
START
f0
TC
RCK
Fig.V.4. ADC cu reacţie şi numărător: (a) – schemă bloc; (b) – forme de undă.

V. Convertoare analog-numerice
136
Pentru iniţializarea unei conversii se resetează numărătorul – N prin comanda RS şi se setează bistabilul – B prin comanda START, fiind astfel permis accesul impulsurilor de tact prin poarta – P, spre numărător. Codul numeric de la ieşirea numărătorului este convertit analogic cu un DAC, iar tensiunea rezultată – vc este comparată cu tensiunea de intrare – vx. În momentul în care se atinge condiţia vc ≥ vx, comparatorul – U îşi schimbă starea resetând bistabilul – B, accesul impulsurilor de tact prin poarta – P este blocat şi numărătorul rămâne în starea din acel moment, iar codul numeric de la ieşirea numărătorului reprezintă rezultatul conversiei A/D.
Semnalele analogice de la intrarea comparatorului sunt ilustrate grafic în Fig.V.4.b. Se observă că timpul de conversie – TC depinde de valoarea tensiunii de intrare – vx. Timpul maxim de conversie pentru n biţi are valoarea TCmax = 2nT0, unde T0 reprezintă perioada impulsurilor de tact, cu frecvenţa f0. Prin urmare, viteza de conversie este proporţională cu frecvenţa de tact. Deci pentru creşterea vitezei de conversie, se impune reducerea perioadei de tact – T0. Valoarea minimă T0 este impusă de timpul total de propagare al semnalului pe buclă:
maxpP
maxpB
maxpU
maxpDAC
maxpN
maxpP0 ttttttT +++++≥ , (V.8)
unde indicii cu majuscule desemnează circuitele electronice cu aceeaşi notaţie. Dacă, utilizând circuite de mare viteză, timpul de conversie creşte, poate apare necesitatea utilizării unor circuite de eşantionare-memorare şi filtrare antialising (pct.IV.7.1). Însă, de regulă, ADC cu reacţie şi numărător este adecvat pentru conversia A/D a semnalelor continue sau lent variabile, cu frecvenţa maximă sub ordinul kiloherţilor. O altă variantă a acestei scheme include un numărător reversibil, obţinându-se astfel, un ADC cu urmărire, aşa cum este exemplificat în schema din Fig.V.5.
(b)(a)
+
-
∞U
TACT
DAC
N
. . .. . .
vx
CO
DIEŞI
RE
vc
CKU/D
vx
vc
vx
t
vc
Fig.V.5. ADC cu urmărire: (a) – schemă bloc; (b) – forme de undă.

V.3. ADC cu reacţie
137
În schema din Fig.V.5 comparatorul schimbă sensul de numărare – up/down, al numărătorului, astfel ca semnalul de ieşire al DAC să urmărească semnalul de intrare.
Pentru ca acest tip de DAC să funcţioneze corect, este necesară existenţa unei corelaţii între perioada impulsurilor de tact şi viteza de variaţie a semnalului de intrare şi anume: variaţia semnalului de intrare pe durata unei perioade de tact trebuie să nu depăşească valoarea unei trepte de cuantificare, adică un LSB. În acest scop, pentru o frecvenţă de tact precizată, se pune problema stabilirii componentei de frecvenţă maximă care poate exista în spectrul semnalului de intrare. Aşadar, dacă:
tVv ω= sin2max , rezultă ω=
2dd max
max
Vtv , (V.9)
deci condiţia de mai sus poate fi exprimată matematic astfel:
nmax
0max
22VTV
≤ω sau 0nmax 21 ffπ
≤ , (V.10)
unde T0 şi f0 reprezintă perioada şi frecvenţa impulsurilor de tact, iar fmax – frecvenţa maximă din spectrul semnalului de intrare, care mai poate fi convertită A/D corect.
V.3.2. ADC CU APROXIMAŢII SUCCESIVE
Convertoarele ADC cu aproximaţii succesive, spre deosebire de cele cu numărător, au durata de conversie constantă şi egală cu un număr de perioade ale tactului identic cu numărul de biţi. Rezultă deci, că la un nivel comparabil al preciziei şi complexităţii, viteza acestor convertoare va fi net superioară celor cu numărător. Există o mare varietate de ADC cu aproximaţii succesive. Funcţionarea acestora se bazează pe faptul că într-un şir de termeni ponderaţi binar, fiecare din termeni este mai mare decât suma termenilor de rang inferior. Presupunând că:
( ) ∑=
=
−−−− =+++=ni
0i
iir
ii
22
11rx 2222 aVa...aaVv , (V.11)
şi luând în considerare faptul că:
( ) ( )1rn-1rni
ri
i 2222 −−−−=
=
− <−=∑ , (V.12)
se poate compara vx cu 2−1Vr. Dacă vx > 2−1Vr, rezultă a1 = 1, în caz contrar a1 = 0,
deoarece 1ni
2i
i 22 −=
=
− <∑ . Astfel se stabileşte valoarea bitului a1, deci a bitului MSB.
Pentru stabilirea valorii bitului a2, se compară vx cu a12−1Vr + 2−2Vr = Vr(a12−1 + 2−2). Dacă vx > a12−1Vr + 2−2Vr sau vx − a12−1Vr > 2−2Vr, rezultă a2 = 1, în caz contrar a2 = 0.

V. Convertoare analog-numerice
138
În general, pentru stabilirea valorii unui bit oarecare i, dacă:
+> ∑
−=
=
−−1iq
1q
irx 22 aVv , rezultă ai = 1, în caz contrar ai = 0; (V.13)
sau:
ri
1iq
1q
qqrx 22 VaVv −
−=
=
− >− ∑ , rezultă ai = 1, în caz contrar ai = 0, (V.14)
Ca urmare, la fiecare pas oarecare i se testează acceptarea sau neacceptarea
termenului 2−iVr în suma ∑−=
=
−1iq
1q
qqr 2aV , necesară în pasul următor, acceptarea fiind
echivalentă cu ai = 1, iar neacceptarea fiind echivalentă cu ai = 0. O schemă de ADC cu aproximaţii succesive şi reacţie, cu largă utilizare practică, este reprezentată în Fig.V.6. După cum se observă, ADC este constituit dintr-un comparator şi un DAC – componente indispensabile schemelor cu reacţie şi dintr-un registru de aproximaţii succesive – SAR, care prezintă 3 intrări: date, tact şi start şi 3 ieşiri: semnalizare sfârşit conversie, ieşire numerică serie şi ieşire numerică paralel. Funcţia SAR poate fi implementată prin hardware sau poate fi simulată prin software.
+
-
∞U
DAC
. . . . . .
vx
vc
CK
D
SARS
MSB LSB
IEŞIRENUMERICĂPARALEL
STOP CONVERSIE
IEŞIRE NUMERICĂ SERIE
START CONVERSIE
TACTDATA
Fig.V.6. ADC cu aproximaţii succesive.
După primirea comenzii de START, SAR generează codul 100…0, adică compară vx cu 2−1Vr, iar funcţie de rezultatul comparaţiei bitul a1 este păstrat cu valoarea 1 sau 0, prin memorarea în SAR a stării logice a comparatorului. Apoi, SAR generează codul a110…0, pentru stabilirea valorii bitului a2 şi procesul continuă până la bitul LSB, după care se emite semnalul STOP CONVERSIE şi schema intră în regim de standby, în aşteptarea unei noi comenzi de START. Pentru exemplificare, în Fig.V.7 se prezintă organigrama aproximaţiilor succesive, pentru un ADC de trei biţi.

V.4. ADC cu integrare
139
vx
rx V21v >
rx V43v > rx V
41v >
rx V87v > rx V
85v > rx V
83v > rx V
81v >
YES110
NO100
YES010
NO000
YES100
NO000
YES111
NO110
YES101
NO100
YES011
NO010
YES001
NO000
100
110 010
111 101 011 001
Fig.V.7. Organigrama comparaţiilor succesive pentru un ADC de 3 biţi.
Există şi o mare varietate de scheme de ADC cu aproximaţii succesive, care nu intră în categoria ADC cu reacţie. Aceste funcţionează pe baza (V.14), cu deosebirea că tensiunea necesară pentru comparaţiile succesive nu este generată de un DAC, ci este obţinută cu ajutorul unor reţele rezistive ponderate binar. Deci, aceste ADC vor fi implicit afectate de dezavantajele binecunoscute ale reţelelor ponderate binar. Ca urmare, din categoria ADC cu aproximaţii succesive, cel mai utilizat rămâne ADC cu reacţie şi DAC, conform Fig.V.6. El este utilizat atât în aplicaţiile de viteză, fiind un circuit de viteză relativ mare, cât şi în aplicaţiile care necesită rezoluţie mare (14-16 biţi), având un factor de merit (= viteză × rezoluţie) dintre cele mai ridicate.
V.4. ADC CU INTEGRARE
Un criteriu de clasificare al ADC se poate stabili şi funcţie de faptul dacă acestea sunt integratoare sau neintegratoare. Prin aceste denumiri se face referire la includerea unor operaţii de integrare în principiul de funcţionare al ADC. Se poate constata că de fapt acest criteriu de clasificare este cel fundamental, fiindcă separă ADC în două categorii distincte, în ceea ce priveşte viteza şi rejecţia perturbaţiilor.

V. Convertoare analog-numerice
140
Astfel, ADC neintegratoare măsoară valoarea instantanee a tensiunii de intrare, fapt pentru care, în general, trebuie precedate de circuite de eşantionare-memorare. Sunt circuite de viteză, dar prezintă dezavantajul că perturbaţiile suprapuse peste semnalul util sunt foarte greu de eliminat sau redus, prin mijloace hardware. Şi aceasta, fiindcă soluţia cea mai simplă de reducere a perturbaţiilor, care este filtrarea, intră în contradicţie cu viteza de conversie. Ca urmare, chiar dacă rămân la dispoziţie tehnicile antiperturbative numerice, eficienţa acestora este proporţională cu nivelul iniţial al perturbaţiilor, deoarece raportul de rejecţie realizat are valoare limitată. Cele mai reprezentative ADC, care intră în categoria de neintegratoare, sunt cele cu funcţionare paralel, cu aproximaţii succesive, cu rampă liniară şi cu rampă în trepte. Spre deosebire de acestea, ADC integratoare convertesc numeric valoarea medie a tensiunii de intrare pe un anumit interval de timp, prin integrarea acestei tensiuni. Din acest fapt decurg două consecinţe şi anume: ca dezavantaj rezultă viteza mică de conversie, iar ca avantaj este filtrarea implicită a tensiunii de intrare, fiindcă orice integrator constituie un filtru trece-jos, care asigură o rejecţie a perturbaţiilor serie. În categoria ADC integratoare intră cele cu conversiune intermediară în frecvenţă (convertoare tensiune-frecvenţă) şi cele cu conversiune intermediară în timp (cu simplă integrare, cu dublă integrare şi cu multiplă integrare), datorită faptului că timpul şi frecvenţa sunt două mărimi analogice care pot fi măsurate numeric direct.
V.4.1. REJECŢIA PERTURBAŢIILOR SERIE LA ADC CU INTEGRARE
Valoarea medie pe o perioadă a unui semnal alternativ fiind zero, raportul de rejecţie serie – RRS depinde de timpul de integrare şi de relaţia acestuia cu perioada semnalului perturbator. Fiindcă, semnalul perturbator cel mai puternic şi răspândit provine din reţeaua de curent alternativ, majoritatea ADC cu integrare au timpul de conversie corelat cu perioada acestui semnal, adică este un multiplu de 20 ms. În general, RRS este o funcţie periodică de frecvenţa semnalului perturbator. Pentru a o evalua, se consideră un semnal perturbator sinusoidal:
tVv ω= sinmp , (V.15) suprapus peste semnalul util, care în cazul ADC cu integratoare trebuie să fie o tensiune continuă sau lent variabilă. Dacă se notează cu T timpul de integrare al ADC, valoarea medie a semnalului perturbator va avea expresia:
2sin
2sin2sin1 m
Tt
tmmed
TTtT
VtVT
V ω
+ω
ω=ω= ∑
+
. (V.16)

V.4. ADC cu integrare
141
Valoarea maximă a tensiunii medii, conform (V.16), este:
2sin2sin1 m
Tt
tm
maxmed
TT
VtVT
V ωω
=ω= ∑+
, (V.17)
iar valoarea maximă a semnalului perturbator se consideră Vm. Având în vedere relaţia de definiţie, se obţine pentru RRS următoarea expresie:
fT
fTRRSπ
π=
sinlog20 , (V.18)
unde f reprezintă perioada semnalului perturbator. Dacă se reprezintă grafic (V.18), în coordonate logaritmice, graficul RRS, funcţie de produsul fT, arată ca în Fig.V.8.
RR
S [d
B]
01020304050
0,1 1 10fT 100
60
Fig.V.8. Reprezentarea grafică a RRS, în coordonate logaritmice.
Din (V.18) şi Fig.V.8 se observă că pentru valori întregi ale produsului fT sinωt → 0 şi RRS → ∞, iar în rest, valoarea minimă a RRS creşte proporţional cu fT.
V.4.2. ADC CU DUBLĂ INTEGRARE
Deşi, ADC cu dublă integrare, dublă pantă sau dublă rampă, este un circuit clasic, cunoscut de la alte discipline anterioare, este reluat pe scurt şi în acest context doar pentru a constitui un punct de plecare pentru alte tipuri de ADC cu integrare. Schema de principiu a ADC cu dublă rampă este reprezentată în Fig.V.9. În regim de aşteptare, care intervine între două cicluri de conversie, comutatorul S = 2, tensiunea de la ieşirea integratorului – U1 are valoarea vi > 0, comparatorul – U1 se află în starea logică 0, deci poarta P este blocată. La apariţia comenzii de start conversie, blocul de comandă – BC încărcă numărătorul – N cu un număr N1 egal sau apropiat cu capacitatea maximă a acestuia şi trece comutatorul în poziţia S = 1. Ca urmare, tensiunea vi devine liniar descrescătoare cu panta dependentă de nivelul vx, iar la trecerea prin zero poarta este validată şi numărătorul începe să se decrementeze.

V. Convertoare analog-numerice
142
vi
T1 T2
vx1 > vx2
t
(b)
+
-
+
-
+vx
1
−Vr
2 SR
D C
∞U1
∞U2
P
BC
N
COD OUTf0
vi
(a)
Fig.V.9. Principiul de funcţionare al ADC cu dublă rampă: (a) – schema de principiu; (b) – forme de undă caracteristice.
La trecerea numărătorului prin zero, BC comandă S = 2 şi inversarea sensului de numărare al numărătorului, ca urmare vi îşi schimbă sensul de variaţie devenind liniar crescătoare cu pantă constantă determinată de Vr. Acest proces continuă până când vi trece din nou prin zero spre valori pozitive şi comparatorul blochează poarta. Dacă se notează cu f0 = 1/T0 frecvenţa impulsurilor de tact, se pot scrie relaţiile:
( ) tRCvtv x
i −= şi ( ) 1x
1i TRCvTv −= , (V.19)
valabile pentru prima rampă (S = 1), iar pentru a doua rampă (S = 2):
( ) ( ) tRCVTvtv r
1ii += , şi ( ) 02i =Tv , (V.20)
de unde se obţine relaţia:
1
2rx TTVv = . (V.21)
Dacă pe intervalul T2 numărătorul a înregistrat N2 impulsuri, având în vedere că T1 = N1T0 şi T2 = N2T0, din (V.21) rezultă expresia caracteristicii de transfer a ADC:
x1
2 vVNN
r
= , (V.22)
prin urmare, N2 este proporţional cu vx, constanta de proporţionalitate fiind N1/Vr. Se observă că în relaţia de mai sus nu intervin mărimile f0, R şi C, fapt ce contribuie substanţial la eliminarea unor surse importante de erori. Din considerente de rejecţie a perturbaţiilor (pct.V.4.1), durata T1 de integrare a tensiunii de intrare se alege egală cu un multiplu al perioadei tensiunii din reţeaua de alimentare cu energie electrică, adică 20 ms în cazul reţelelor de 50 Hz. Dar frecvenţa reţelei ne fiind riguros constantă, acest fapt afectează negativ rejecţia perturbaţiilor.

V.4. ADC cu integrare
143
Din considerentul de mai sus, ADC cu dublă rampă mai performante, pot avea durata de integrare T1 egală riguros cu un multiplu de perioade ale tensiunii de reţea, prin sincronizarea frecvenţei de tact cu frecvenţa reţelei de curent alternativ, cu ajutorul unei bucle cu calare de fază – PLL (Phase-Locked-Loop), conform Fig.V.10. Bucla PLL este constituită dintr-un comparator de fază – COMP.FAZĂ, care comandă VCO (Voltage Controlled Oscialtor), astfel încât semnalele de intrare să fie în fază.
VCO
DIVIZOR1/K
f0 = Kf≈COMPFAZĂ
≈= fKf0
f≈ (≅ 50 Hz)PLL
Fig.V.10. Sincronizarea frecvenţei de tact cu frecvenţa reţelei de c.a.
Plecând de la principiul ADC cu dublă rampă sau dezvoltat o serie de ADC cu integrare şi mai multe pante, care urmăresc atingerea a două obiectiv principale şi anume, fie reducerea timpului de conversie, fie creşterea rezoluţiei de conversie.
V.4.3. ADC CU MAI MULTE PANTE PENTRU CREŞTEREA VITEZEI
Durata T1 a ciclului de conversie al unui ADC cu dublă rampă nu poate fi redusă sub 20 ms, din motive de rejecţie. Ca urmare, singura posibilitate de reducere mai departe a timpului de conversie rămâne reducerea duratei T2. În acest scop, se cunosc ADC cu dublă integrare în trei pante, care pentru aducerea integratorului la zero utilizează iniţial o descărcare cu pantă de zece ori mai mare, pentru reducerea duratei T2, iar în final se revine la o panta normală pentru a se asigura rezoluţia dorită. Pe durata descărcării cu pantă mare, impulsurile de tact sunt introduse într-un rang superior al numărătorului, iar pe durata descărcării cu pantă normală impulsurile de tact sunt introduse la intrarea numărătorului (rangul cel mai puţin semnificativ).
O altă variantă de ADC din această categorie are la bază integrarea cu mai multe pante, conform diagramei temporale reprezentată în Fig.V.11. Prima pantă a integratorului – vi1(t) este identică cu cea de la ADC cu dublă rampă şi anume:
( ) tRCvtv x
i1 −= şi ( ) 1x
1i1i1 TRCvVTv −== , unde τ= 11 NT . (V.23)

V. Convertoare analog-numerice
144
Vi1
t
t
vi1
αm
vim
∆vim
αs
∆vis
vis
αz
∆viz
viz
αu
∆viuviu
T1=N1τ Tm=Nmτ Ts=Nsτ Tz=Nzτ Tu=Nuτ. . . . . . . . . . . . . . .
Tm0 tm
τ=T0=1/f0 – PERIOADA IMPULSURILOR DE TACT
Fig.V.11. Diagrama temporală pentru un ADC cu mai multe pante.
A doua fază a procesului de dublă integrare se realizează după mai multe pante, aranjate în progresie geometrică cu raţia 10:
tv
tv
tv
tv
dd1000
dd100
dd10
dd iuizisim −==−= ;
sau: (V.24) uzsm tg1000tg100tg10tg α−=α=α−=α .
Schema ADC cu mai multe pante este asemănătoare cu a celui cu dublă rampă, cu deosebirea că, comutatorul are mai multe poziţii, iar tensiunea de referinţă (sau rezistenţa R) are mai multe valori pozitive şi negative, conform (V.24). Totodată, numărătorul are 4 ranguri zecimale şi posibilitatea ca fiecare rang să fie incrementat sau decrementat individual. Intervalele de timp în care se face numărarea pe cursa inversă sunt Tm – pentru rangul miilor, Ts – pentru rangul sutelor, Tz – pentru rangul zecilor şi Tu – pentru rangul unităţilor. Aceste intervale de timp sunt delimitate de primul front crescător al impulsurilor de tact care apare după trecerea prin zero a tensiunii integratorului. După expirarea intervalului de timp T1, urmează panta de măsurare cu ponderea miilor, în care se înregistrează Nm impulsuri în rangul miilor al numărătorului, pe durata de timp Tm. Din cauza caracterului discret al numărării, intervalul Tm va fi mai mare decât Tm0, care reprezintă măsura exactă a lui vx, cu cel mult o perioadă de tact τ = T0, altfel spus, cifra miilor este rotunjită prin adaos. Prin urmare, tensiunea integratorului va depăşi trecerea prin zero cu o anumită cantitate:

V.4. ADC cu integrare
145
τ=≤=∆t
vqtt
vvd
dd
d immm
imim , deoarece τ≤mt ; (V.25)
unde qm reprezintă cuanta de conversie (rezoluţia) corespunzătoare rangului miilor. Pe durata Tm, tensiunea integratorului – vim variază conform relaţiei:
( ) tt
vTRCvt
tvVtv
dd
dd im
1xim
i1im +−=+= , (V.26)
iar la expirarea intervalului de timp Tm, (V.26) devine:
( ) mim
1x
immim dd T
tvT
RCvvTv +−=∆= , (V.27)
din care, având în vedere că T1 = N1τ şi Tm = Nmτ, unde τ = T0 = 1/f0, rezultă:
τ∆
−= imimm
1x d
d vt
vNNRCv . (V.28)
Pentru obţinerea valorii exacte a tensiunii vx trebuie determinată tensiunea reziduală ∆vim, printr-un nou proces de integrare corespunzător rangului sutelor:
( ) tt
vvtvd
d isimis −∆= . (V.29)
În mod analog, la expirarea Ts = Nsτ şi rampa vis depăşeşte trecerea prin zero cu:
( ) τ=≤−∆=∆−=t
vqTt
vvvTvd
dd
d isss
isimissis , (V.30)
care introdusă în (V.28), conduce la relaţia:
τ∆
+−= isiss
imm
1x d
dd
d vt
vNt
vNNRCv . (V.31)
Tensiunea reziduală ∆vis se determină prin integrare pe rampa zecilor:
( ) tt
vvtvd
d izisiz +∆−= . (V.32)
La expirarea duratei Tz = Nzτ rampa viz depăşeşte trecerea prin zero cu cantitatea:
( ) τ=≤+∆−=∆=t
vqTt
vvvTvd
dd
d izzz
izisizziz , (V.33)
care introdusă în (V.31), conduce la relaţia:
τ∆
−+−= izizz
iss
imm
1x d
dd
dd
d vt
vNt
vNt
vNNRCv . (V.34)
În final, se determină tensiunea ∆viz printr-o integrare pe rampa unităţilor:
( ) tt
vvtvd
d iuiziu −∆= . (V.35)
La expirarea duratei Tu = Nuτ rampa viu depăşeşte trecerea prin zero cu cantitatea:

V. Convertoare analog-numerice
146
( ) τ=≤−∆=∆−=t
vqTt
vvvTvd
dd
d iuuu
iuiziuuiu , (V.36)
care introdusă în (V.34), conduce la relaţia:
τ∆
+−+−= iuiuu
izz
iss
imm
1x d
dd
dd
dd
d vt
vNt
vNt
vNt
vNNRCv . (V.37)
Având în vedere relaţiile (V.24) dintre pante şi considerând că:
RCV
tv riu
dd
= , (V.38)
se obţine:
∆+−+−=
u
iuuzsm
1
rx 1001001000
qvNNNN
NVv . (V.39)
unde:
τ=τ=RCV
tvq riu
u dd . (V.40)
Prin urmare, valoarea tensiunii de intrare – vx poate fi exprimată prin numărul:
uzsmx1
2 101001000 NNNNvVNN
r
−+−== , (V.41)
cu o eroare mai mică decât unitatea. Timpul de conversie al ADC cu mai multe pante poate fi comparat cu cel al unui ADC cu dublă rampă. Astfel, pentru ADC cu dublă rampă durata conversiei este :
( )τ+=+= 2121cdp NNTTT , (V.42) iar pentru ADC cu mai multe pante durata conversiei are valoarea:
( )τ++++=++++= uzsm1uzsm1cmp NNNNNTTTTTT , (V.43) deci:
( ) ( )τ+=<τ+≤ 21cdp1cmp 36 NNTNT , fiindcă 999936 2 ≤<< N . (V.44) Dacă se admite că N2max = N1 = 9999, rezultă că Tcmp(max) ≅ N1T0 = (1/2)Tcdp(m. Prin urmare, deşi T2 scade radical, viteza de conversie nu poate creşte mai mult de 2 ori.
V.4.4. ADC CU MAI MULTE PANTE PENTRU CREŞTEREA PRECIZIEI
O soluţie ce poate fi utilizată în scopul creşterii preciziei de conversie, constă în introducerea unor cicluri suplimentare de integrare, pentru reducerea influenţei erorilor statice ale circuitelor componente. Schema de principiu a unui astfel de ADC, cunoscut şi sub denumirea de ADC cu integrare în patru pante sau ADC cu dublă integrare şi corecţie în patru pante, este reprezentată în Fig.V.12.

V.4. ADC cu integrare
147
+
-
+
-
S1
S2
S3
Vn
V1
vx
V2
S0
RC
U1∞ U2∞
N1 N2 N3 N f0
BLOC DE CONTROL
vi
Fig.V.12. Schema de principiu a unui ADC cu integrare în patru pante.
Un ciclu de conversie cuprinde şase faze, în afara fazei de aşteptare. Variaţia în timp a tensiunii de la ieşirea integratorului – vi, este reprezentată în Fig.V.13.
t
F0 F1 F2 F3 F4 F5
T1=N1τ∗2T ∗−τ 21 T3N ( ) ∗+τ−− 213 TN3NN Nτ
vi vx=−vxmax
vx=0vx=+vxmax
T2=N2τ=4N1τT3=N3τ
Fig.V.13. Diagrama temporală pentru un ADC cu patru pante.
În Fig.V.12, cu Vn s-a notat potenţialul masei de semnal, iar V1 şi V2 reprezintă două tensiuni de referinţă pozitive, îndeplinind condiţia V1 = 2V2. Tensiunea de intrare vx poate fi atât pozitivă cât şi negativă, dacă se respectă condiţia vx< V2. Faza de integrare F0 începe cu conectarea comutatorului S2, pentru ca tensiunea integratorului – vi să fie adusă la zero, prin urmare este o fază de iniţializare. În faza F1, se conectează S1 şi se pornesc numărătoarele N1 şi N2, care numără impulsuri de tact cu perioada τ = 1/f0, până la nişte valori fixe, anume N1 şi N2 = 4N1.

V. Convertoare analog-numerice
148
Pe durata T1 = N1τ, a fazei F1, se integrează Vn, apoi începe faza F2, prin conectarea S2 şi aducerea tensiunii vi din nou la zero. Durata T1 fiind fixă, rezultă că durata ∗
2T va fi variabilă, în funcţie de tensiunea totală de decalaj din schemă. Faza F3 debutează prin conectarea comutatorului S3 şi pornirea numărătorului N3, care va număra până la o valoare fixă N3 şi se încheie la un moment de timp prestabilit şi anume la expirarea duratei T2 = 4N1τ. Faza F4 începe cu conectarea S2 şi aducerea tensiunii vi la zero. Momentul vi = 0 constituie terminarea fazei F4 şi startul fazei F5, când se porneşte numărătorul N. Faza F5 durează până când expiră intervalul de timp T3 = N3τ, iar conţinutul numărătorului N reprezintă valoarea numerică a tensiunii vx, care poate fi exprimată în cod binar deplasat sau în cod complementar faţă de 2, conform pct.IV.1. În Fig.V.13 s-au trasat diagramele pentru vx = +vxmax, 0, –vxmax, intervalul de timp Nτ fiind figurat numai pentru vx = 0, chiar dacă în acest caz ar trebui să fie zero. Pentru prima dublă integrare – fazele F1 şi F2, se poate scrie relaţia:
∗−=τ
−− 2
211
2n TRC
VVNRC
VV , (V.45)
iar pentru a doua dublă integrare – fazele F3 şi F4, este valabilă relaţia:
( ) ( )[ ]∗∗ +τ−−−
=−τ−
− 21321
21nx 33 TNNN
RCVVTN
RCVv . (V.46)
Rezolvând sistemul de ecuaţii (V.45) şi (V.46), se obţine:
−−
−−−
−=21
n2
21
x113 3
VVVV
VVvVNNN . (V.47)
Dacă se consideră o tensiune echivalentă de decalaj – Vd suprapusă peste tensiunea V2, având în vedere faptul că V2 = V1/2 şi Vn = 0, din (V.47) rezultă:
d1
d1
d1
x113 2
42
4VVVV
VVvVNNN
−−
⋅−−
−= , (V.48)
expresie care poate fi pusă sub următoarea formă mai explicită:
( )2
1
d1
x113
d11
2d1
x113
41
14
441
14
+
⋅−
−≅
−+
⋅−
−=
VVV
vVNN
VVVVV
vVNNN , (V.49)
unde s-a considerat că 4Vd << V1. În cazul ideal când Vd = 0, (V.48)-(V.49) devenind:
1
x113 4
VvVNNN −
−=∗ , (V.50)
se poate calcula eroarea generată de tensiunea totală de decalaj ∆N = N – N*→ 0.

V.5. Convertoare tensiune-frecvenţă – VFC
149
Dacă în acelaşi mod ca mai sus, se calculează eroarea generată de tensiunile de decalaj şi în cazul ADC cu dublă rampă, se poate constata că aceasta este cu aproximativ două ordine de mărime mai mare decât în cazul ADC cu patru rampe. O altă metodă de integrare cu mai multe pante, deosebit de eficace în reducerea erorilor statice ale schemei electronice, este implementată printr-un ADC cu dublă integrare multiplu repetată. Şi în acest caz, se utilizează două tensiuni de referinţă, V1 şi V2, dubla integrare fiind repetată de şase ori pentru fiecare din următoarele perechi de tensiuni: (−vx/V2), (V1/−V2), (−V2/V2), (V2/−V2), (−V1/V2) şi în fine, (vx/−V2).
V.5. CONVERTOARE TENSIUNE-FRECVENŢĂ – VFC
Convertoarele tensiune-frecvenţă – VFC (Voltage to Frequency Converter) intră în categoria ADC cu conversiune intermediară în frecvenţă. VFC pot fi foarte utile acolo unde viteza de conversie nu este critică. Un mare avantaj al VFC îl constituie posibilitatea de prelucrare locală a informaţiei şi transmiterea rezultatului la distanţă, fără sau cu izolare galvanică. Frecvenţa este o mărime mult mai insensibilă la perturbaţii, comparativ cu nivelul. Izolarea galvanică, atunci când este necesară, se poate realiza simplu prin transformator de impulsuri sau prin optocuplor. Există o mare varietate de scheme şi posibilităţi de realizare a VFC. Însă toate acestea funcţionează în general după următoarele două principii de bază: • încărcarea şi descărcarea unui condensator de integrare, între două nivele de
referinţă, la un curent proporţional cu tensiunea de măsurat; • compararea tensiunii de măsurat cu valoarea medie a unui şir de impulsuri de arie
constantă şi perioadă de repetiţie variabilă; aceste VFC au la bază metodele de compensare sau echilibrare, deci reacţia negativă, fiind cunoscute şi sub denumire de VFC cu acumulare sau echilibrare de sarcină.
Având în vedere aspectul menţionat mai sus, în cele ce urmează va fi ilustrat doar principiul de funcţionare al celor două mari categorii constructive de VFC.
V.5.1. VFC CU CONDENSATOR DE INTEGRARE
Principiul de funcţionare al unui VFC cu condensator de integrare este ilustrat în Fig.V.14. Pe durata de timp T1, în care S1 = 2 şi S2 = 1, variaţia tensiunii de ieşire a integratorului – U1 este descrisă de relaţia:
( ) tRCvVtv x
ri +−= . (V.51)

V. Convertoare analog-numerice
150
vi+Vr
−Vrt
T1 T2t
vc
(b)
+
-
+
-
vi
vc
R CU1∞ U2∞
+Vr
−Vr
+vx
−vx S1
S2
1
21
2(a)
Fig.V.14. Principiul de funcţionare al VFC cu condensator de integrare: (a) – schema de principiu; (b) – forme de undă.
La momentul de timp T1 (V.51) conduce la concluzia:
( ) r1i VTv = , deci x
r1 2
vVRCT = . (V.52)
Pe durata de timp T2, în care S1 = 1 şi S2 = 2, tensiunea vi este descrisă de relaţia:
( ) tRCvVtv x
ri −= . (V.53)
La momentul de timp T2 (V.53) conduce la concluzia:
( ) r2i VTv −= , deci x
r2 2
vVRCT = . (V.54)
Pe baza (V.52) şi (V.54) se poate determina expresia frecvenţei de ieşire:
x
r21x 4
vVRCTTT =+= , deci
r
x
xx 4
1RCVv
Tf == . (V.55)
V.5.2. VFC CU ECHILIBRARE DE SARCINĂ
Principiul de funcţionare al unui VFC cu echilibrare de sarcină este ilustrat în Fig.V.15. Se observă că blocurile de bază, integratorul şi comparatorul, apar şi aici.
(a)
+
-+
-
vi
vc
GIR
CU1∞ U2∞
vxR1
R2−Vr
−Vp
(b)
vi
−Vr T2
t
t
−Vp
vxvr
T1
Fig.V.15. Principiul de funcţionare al VFC cu echilibrare de sarcină: (a) – schema de principiu; (b) – forme de undă.

V.5. Convertoare tensiune-frecvenţă – VFC
151
La aplicarea tensiunii de intrare – vx, presupusă pozitivă, integratorul – U1 generează o tensiune liniar descrescătoare, care este comparată de comparatorul – U2 cu tensiune de prag negativă – Vp. În momentul atingerii pragului de către tensiunea vi, comparatorul comandă generatorul impulsurilor de referinţă – GIR, care generează un impuls de tensiune negativ cu amplitudinea Vr şi durata T1. Acest impuls produce asupra integratorului o acţiune de sens contrar celei a tensiunii vx şi panta tensiunii vi devine liniar crescătoare. După expirarea duratei T1, asupra integratorului acţionează din nou numai tensiunea de intrare vx şi ciclul se repetă. Deci, durata T2 de revenire la nivelul tensiunii de prag este dependentă de tensiunea de intrare vx. Prin urmare, integratorul sumează curenţii prin R1 şi R2, dintre care vx/R1 circulă permanent iar Vr/R2 circulă numai pe durata T1. Matematic, acest fapt poate fi exprimat astfel:
( ) 12
r21
1
x TCR
VTTCR
v=+− . (V.56)
Această relaţie descrie echilibrul de sarcină furnizată integratorului, din care rezultă:
1r
2
121x T
vV
RRTTT
x
⋅=+= , deci r1
x
1
2
xx
1VT
vRR
Tf ⋅== . (V.57)
Se poate observa că tensiunea Vp nu intervine în expresia frecvenţei de ieşire. Elementul esenţial al acestui tip de VFC este generatorul impulsurilor de referinţă, care trebuie să genereze impulsuri cu aria ∫ = const.dr tv O soluţie simplă în
acest sens, utilizată cu precădere în circuitele integrate, o constituie încărcarea unui condensator la tensiunea de referinţă şi descărcarea acestuia la intrarea integratorului. O altă soluţie, mai complicată dar şi mai precisă, constă în utilizarea unui monostabil de precizie pentru obţinerea duratei T1, care comandă mai departe un generator de tensiune sau de curent, cu amplitudinea constantă şi cunoscută cu precizie. În ambele cazuri, erorile asupra duratei T1 depind de performanţele analogice ale circuitelor.
O soluţie ingenioasă care asigură reducerea radicală a erorilor asupra duratei T1, constă în utilizarea unei frecvenţe etalon care sincronizează VFC, conform Fig.V.16. În acest caz, generatorul impulsurilor de referinţă este constituit dintr-un bistabil tip D – U3, sincronizat cu frecvenţa f0 şi DAC – U4, utilizat ca generator comandat de curent. Impulsul de curent necesar pentru echilibrarea sarcinii pe condensatorul C are durata T0 = 1/f0 şi este generat sincron cu primul front crescător al impulsurilor de tact, care apare după ce tensiunea integratorului a atins valoarea zero. Această soluţie este extrem de precisă, eliminând complet erorile asupra duratei T1, fiindcă f0 poate fi obţinută cu precizie net mai mare decât durata de temporizare a unui monostabil, cum ar fi de exemplu derivarea din frecvenţa de clock a unui sistem cu microprocesor.

V. Convertoare analog-numerice
152
+
-+
-
vi
vc
CU1∞ U2∞
vxR f0 CK
DQ
+Vref
B1
U3
I0
vq(fx)
U4
LM 301 LM 311 HC 7474DAC 08(a)
(b)
f0
T2T1
t
t
t
t
vi
vc
vq
0
Fig.V.16. Principiul de funcţionare al VFC cu echilibrare de sarcină sincronizat: (a) – schema de principiu; (b) – forme de undă.
Funcţia de transfer pentru VFC sincronizat are aceeaşi formă ca şi cea pentru
VFC nesincronizat – conform (V.57), cu deosebirea că în acest caz T1 = T0. Pentru a fi posibilă funcţionarea în jurul valorii zero sau pentru tensiuni de
intrare negative, se utilizează o deplasare de nivel care poate fi realizată cu ajutorul unui generator de tensiune sau de curent adecvat.
Convertoarele VFC funcţionând pe acest principiu, pot atinge performanţe ridicate, cum ar fi: rezoluţie de 16-18 biţi, echivalentă cu 5 1/2 cifre zecimale, adică 1/200.000, liniaritate de 0,0025% şi stabilitate cu temperatura de 5 ppm/°C.

Bibliografie
153
BIBLIOGRAFIE
[1]. M. Bodea. Aparate electronice de măsură şi control. EDP, Buc. 1981. [2]. M. Sâmpăleanu. Circuite pentru conversia datelor. Ed.Tehn.Buc., 1980. [3]. A. Millea. Măsurări electrice. Principii şi metode. Ed.Tehn.Buc., 1980. [4]. C. Bulucea, M. Vais, H. Profeta. Circuite integrate liniare. Ed.Tehn.Buc, 1975. [5]. R. Stere, I. Ristea, M. Bodea. Tranzistoare cu efect de cîmp. Ed.Tehn.Buc., 1972. [6]. E. Pop, V. Stoica, I. Naforniţă. Tehnici moderne de măsurare. Ed.Facla, 1983. [7]. P.A. Paratte. Systeme de mesure. Lausanne, 1986. [8]. ANALOG DEVICES. Analog-Digital Conversion Handbook. Norwood, 1986. [9]. TEXAS INSTRUMENTS. Circuits lineaires. Guide de Conception. 1991. [10]. D.F. Hoeschele. Analog to digital and digital to analog conversion techniques.
John Wiley & Sons Inc., 1994. [11]. B. Razavi. Principles of data conversion techniques. IEEE Press, 1995. [12]. I. Szekely, W. Szabo, R. Munteanu. Sisteme pentru achiziţie şi prelucrarea
datelor. Ed.Mediamira, Cluj-Napoca, 1997. [13]. A.M. Manolescu. Analog Integrated Circuits. Ed.Foton International, 1999. [14]. C. Harja. Circuite de condiţionare a semnalelor. Proiectare şi experimentări.
Rotaprint U.T. “Gh.Asachi” Iaşi, 2000.
Top Related