






Languages
Pages
Legal

一般社団法人 電子情報通信学会 バイオメトリクス研究会資料 THE INSTITUTE OF ELECTRONICS, Proceedings of Biometrics Workshop INFORMATION AND COMMUNICATION ENGINEERS
マウス視機性動眼反射測定システム -マシンビジョンと PICマイコンの医・生物学的応用
藤田 陽† 福嶋 才貴† 田端 俊英†
†富山大学大学院理工学研究部神経情報工学研究室 〒930-8555 富山市五福 3190
E-mail: †{m1271130, m1371115}@ems.u-toyama.ac.jp, ttabata@ eng.u-toyama.ac.jp
あらまし 人口が高齢化するにつれて記憶障害を伴う脳変性疾患が問題化している.また人口の 1 割近くがアスペルガー症候群をはじめとする脳発達障害を抱えている.これらの疾患は,生活の質の著しい低下を招くため,その治療法の開発が社会の急務となっている.新規に考案・探索された処置法や薬物の学習機能に対する効果の評価法として視機性動眼反射順応[optokinetic reflex (OKR) adaptation]が注目されている.我々はこれまでにマシンビジョンを応用した操作が直感的でローコストの小動物用 OKR 測定システムを開発してきた.今回,動作ごとに独立したマイコン・チップを用いた刺激制御装置を製作し,刺激制御の操作性および時間的精度を向上させ,OKR 測定システムの実用性を高めた.
キーワード PICマイコン,マシンビジョン,視機性動眼反射,行動学実験
Optokinetic Reflex Measurement System for Mice -A Biomedical Application of Machine Vision and PIC microcontroller-
Akira FUJITA† Toshiki FUKUSHIMA† and Toshihide TABATA†
†Laboratory for Neural Information Technology, Graduate School of Sciences and Engineering, University of Toyama, 3190 Gofuku, Toyama, Toyama 930-8555, Japan
Keyword PIC microcontroller,Machine vision,Optokinetic reflex,Behavioral study
1. はじめに OKR は網膜上の画像の流れを抑えるために反射と
して起こる眼球運動である .左右に動くパターンを連続呈示すると ,学習により画像の流れに対する眼球の追随性 (OKR ゲイン )が向上する [1].とくに各種脳疾患モデルが揃っているマウスなどの小型動物を対象とし
た OKR が測定できれば ,学習に関する医・生物学的研究が大きく進展すると考えられている .測定システムは眼球方位を継時的に測定し ,OKR ゲインを測定する .
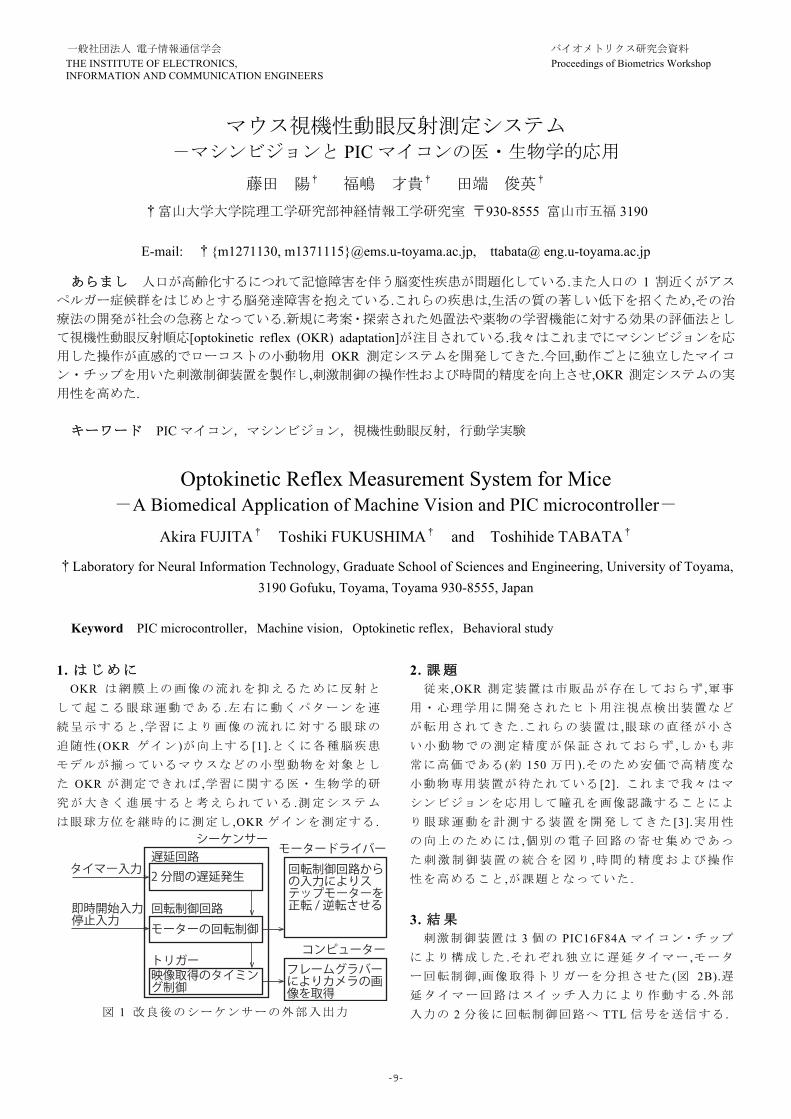
トリガー映像取得のタイミング制御
回転制御回路モーターの回転制御
遅延回路2分間の遅延発生
シーケンサー
フレームグラバーによりカメラの画像を取得
モータードライバー回転制御回路からの入力によりステップモーターを正転 /逆転させる
タイマー入力
即時開始入力停止入力
コンピューター
図 1 改良後のシーケンサーの外部入出力
2. 課題 従来 ,OKR 測定装置は市販品が存在しておらず ,軍事
用・心理学用に開発されたヒト用注視点検出装置など
が転用されてきた .これらの装置は ,眼球の直径が小さい小動物での測定精度が保証されておらず ,しかも非常に高価である (約 150 万円 ).そのため安価で高精度な小動物専用装置が待たれている [2]. これまで我々はマシンビジョンを応用して瞳孔を画像認識することによ
り眼球運動を計測する装置を開発してきた [3].実用性の向上のためには ,個別の電子回路の寄せ集めであった刺激制御装置の統合を図り ,時間的精度および操作性を高めること ,が課題となっていた .
3. 結果 刺激制御装置は 3 個の PIC16F84A マイコン・チップ
により構成した .それぞれ独立に遅延タイマー ,モーター回転制御 ,画像取得トリガーを分担させた (図 2B).遅延タイマー回路はスイッチ入力により作動する .外部入力の 2 分後に回転制御回路へ TTL 信号を送信する .
-9-
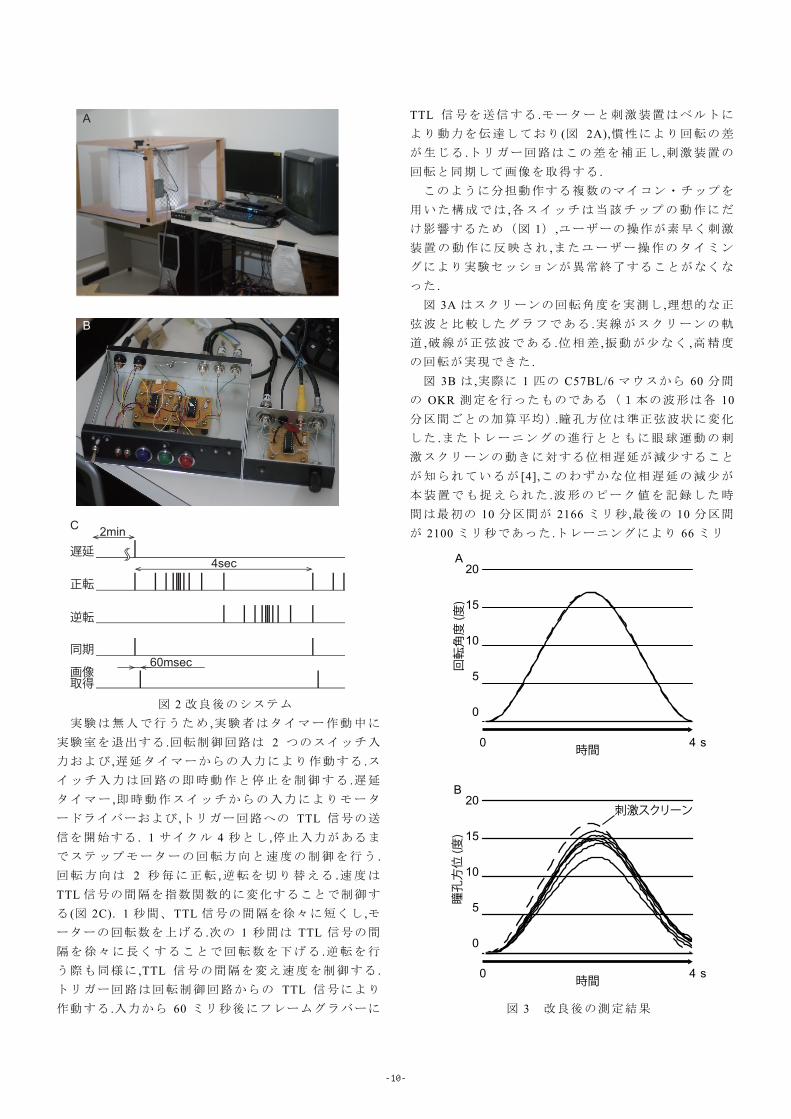
遅延
正転
逆転
同期
画像取得
4sec
60msec
2minC
B
A
図 2 改良後のシステム
実験は無人で行うため ,実験者はタイマー作動中に実験室を退出する .回転制御回路は 2 つのスイッチ入力および ,遅延タイマーからの入力により作動する .スイッチ入力は回路の即時動作と停止を制御する .遅延タイマー ,即時動作スイッチからの入力によりモータードライバーおよび ,トリガー回路への TTL 信号の送信を開始する . 1 サイクル 4 秒とし ,停止入力があるまでステップモーターの回転方向と速度の制御を行う .回転方向は 2 秒毎に正転 ,逆転を切り替える .速度はTTL 信号の間隔を指数関数的に変化することで制御する (図 2C). 1 秒間、TTL 信号の間隔を徐々に短くし ,モーターの回転数を上げる .次の 1 秒間は TTL 信号の間隔を徐々に長くすることで回転数を下げる .逆転を行う際も同様に ,TTL 信号の間隔を変え速度を制御する .トリガー回路は回転制御回路からの TTL 信号により作動する .入力から 60 ミリ秒後にフレームグラバーに
TTL 信号を送信する .モーターと刺激装置はベルトにより動力を伝達しており (図 2A),慣性により回転の差が生じる .トリガー回路はこの差を補正し ,刺激装置の回転と同期して画像を取得する . このように分担動作する複数のマイコン・チップを
用いた構成では ,各スイッチは当該チップの動作にだけ影響するため(図 1) ,ユーザーの操作が素早く刺激装置の動作に反映され ,またユーザー操作のタイミングにより実験セッションが異常終了することがなくな
った . 図 3A はスクリーンの回転角度を実測し ,理想的な正
弦波と比較したグラフである .実線がスクリーンの軌道 ,破線が正弦波である .位相差 ,振動が少なく ,高精度の回転が実現できた . 図 3B は ,実際に 1 匹の C57BL/6 マウスから 60 分間
の OKR 測定を行ったものである(1本の波形は各 10分区間ごとの加算平均).瞳孔方位は準正弦波状に変化した .またトレーニングの進行とともに眼球運動の刺激スクリーンの動きに対する位相遅延が減少すること
が知られているが [4],このわずかな位相遅延の減少が本装置でも捉えられた .波形のピーク値を記録した時間は 初の 10 分区間が 2166 ミリ秒 , 後の 10 分区間が 2100 ミリ秒であった .トレーニングにより 66 ミリ
20
15
5
0
0 s4
10
時間
回転角度 (度)
20
15
5
0
0 s4
10
時間
刺激スクリーン
瞳孔方位 (度)
A
B
図 3 改良後の測定結果
-10-
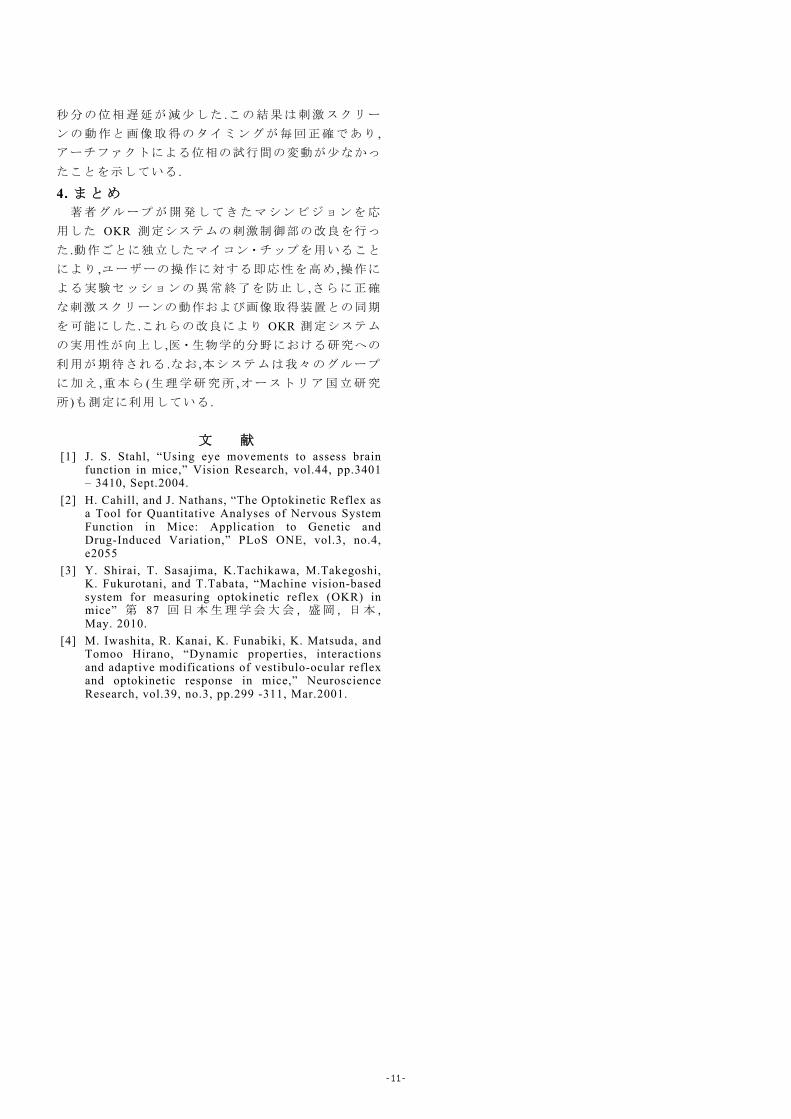
秒分の位相遅延が減少した .この結果は刺激スクリーンの動作と画像取得のタイミングが毎回正確であり ,アーチファクトによる位相の試行間の変動が少なかっ
たことを示している .
4. まとめ 著者グループが開発してきたマシンビジョンを応
用した OKR 測定システムの刺激制御部の改良を行った .動作ごとに独立したマイコン・チップを用いることにより ,ユーザーの操作に対する即応性を高め ,操作による実験セッションの異常終了を防止し ,さらに正確な刺激スクリーンの動作および画像取得装置との同期
を可能にした .これらの改良により OKR 測定システムの実用性が向上し ,医・生物学的分野における研究への利用が期待される .なお ,本システムは我々のグループに加え ,重本ら (生理学研究所 ,オーストリア国立研究所 )も測定に利用している .
文 献
[1] J. S. Stahl, “Using eye movements to assess brain function in mice,” Vision Research, vol.44, pp.3401 – 3410, Sept.2004.
[2] H. Cahill, and J. Nathans, “The Optokinetic Reflex as a Tool for Quantitative Analyses of Nervous System Function in Mice: Application to Genetic and Drug-Induced Variation,” PLoS ONE, vol.3, no.4, e2055
[3] Y. Shirai, T. Sasajima, K.Tachikawa, M.Takegoshi, K. Fukurotani, and T.Tabata, “Machine vision-based system for measuring optokinetic reflex (OKR) in mice” 第 87 回日本生理学会大会 , 盛岡 , 日本 , May. 2010.
[4] M. Iwashita, R. Kanai, K. Funabiki, K. Matsuda, and Tomoo Hirano, “Dynamic properties, interactions and adaptive modifications of vestibulo-ocular reflex and optokinetic response in mice,” Neuroscience Research, vol.39, no.3, pp.299 -311, Mar.2001.
-11-
Top Related