Wyklad Podstawy Automatyki I prof. dr hab. inż. Stanisław Płaska
55
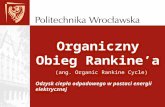
0 Wykład Podstawy Automatyki prof. dr hab. inż. Stanisław Płaska TRANSFORMATY LAPLACE`A NAJCZĘŚCIEJ SPOTYKANYCH FUNKJI Lp. Oryginał Transformata 1 impuls jednostkowy (funkcja Diraca) 1 2 skok jednostkowy funkcja Heviside`a) 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Transcript of Wyklad Podstawy Automatyki I prof. dr hab. inż. Stanisław Płaska

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
TRANSFORMATY LAPLACE`A NAJCZĘŚCIEJ SPOTYKANYCH FUNKJILp. Oryginał Transformata 1 impuls jednostkowy (funkcja Diraca) 1
2 skok jednostkowy funkcja Heviside`a)
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
PLAN WYKŁADÓW Z PODSTAW AUTOMATYKI

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Wykład 1
Podstawowe modele matematyczne stosowane w opisie procesów. Relacje w układzie (pojęcia transmitancja, obserwowalność, sterowalność, niezmienniczość,
wrażliwość, optymalizacja).
Treść wykładu:Wprowadzenie do przedmiotu. Układy dynamiczne i sterowanie (historia sterowania). Podstawowe pojęcia i terminologia (modelowanie układu, formułowanie problemu). Statyka układu i linearyzacja (przyczynowość, zależności w stanie ustalonym, aproksymacja liniowa).
Wykład 2
Opis procesów: model, przyczynowo-skutkowy, model w przestrzeni stanu. Uogólnione zmienne sygnałowe.
Treść wykładu:Przepływ sygnału w układzie (przekształcenie Laplace’a, schematy blokowe i grafy przepływu sygnałów). Opis procesów: równania różniczkowe o parametrach skupionych, inne równania różniczkowe. Własności przekształcenia Laplac’a. Odwrotne przekształcenie Laplac’a. Inne metody opisu (logika rozmyta). Relacje w układzie (pojęcia transmitancja, obserwowalność, sterowalność, niezmienniczość, wrażliwość, optymalizacja). Transmitancja operatorowa i macierz transmitancji operatorowych
Wykład 3
Klasyfikacja układów sterowania
Treść wykładu:Przykłady rachunkowe związane z przekształceniem Laplace’a. Klasyfikacja układów regulacji automatycznej. Przykłady. Schematy.
Wykład 4
Układy sterowania zwykłego. Układy adaptacyjne. Układy rozgrywające.
Treść wykładu:Układy sterowania zwykłego. Układy adaptacyjne. Układy rozgrywające. Budowa, cechy charakterystyczne. Przykłady praktyczne.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Wykład 5
Właściwości układów. Typowe wymuszenia.
Treść wykładu:Właściwości układów: właściwości statyczne, właściwości dynamiczne. Wymuszenie: skokowe, impulsowe itp. Realizacja praktyczna typowego wymuszenia.
Wykład 6
Klasyfikacja podstawowych właściwości dynamiczne. Wyznaczanie charakterystyk czasowych.
Treść wykładu:Charakterystyka impulsowa. Charakterystyka skokowa. Odpowiedź układu na dowolne wymuszenie. Transmitancja widmowa. Macierz transmitancji widmowej.
Wykład 7
Charakterystyki częstotliwościowe. Wyznaczenie charakterystyk częstotliwościowych układu złożonego.
Treść wykładu:Charakterystyki częstotliwościowe. Charakterystyka amplitudowa. Charakterystyka fazowa. Logarytmiczna charakterystyka amplitudowa. Logarytmiczna charakterystyka fazowa. Charakterystyka amplitudowo – fazowa. Człony układów regulacji automatycznej. Przykłady - wyznaczenie charakterystyk częstotliwościowych układu złożonego.
Wykład 8
Właściwości obiektów sterowania. Właściwości regulatorów.
Treść wykładu:Przekształcanie schematów blokowych. Wyznaczanie charakterystyk częstotliwościowych różnych obiektów sterowania. Układy ze sprzężeniem zwrotnym. Regulatory liniowe. Regulator proporcjonalny. Regulator całkujący. Regulator proporcjonalno-całkujący. Regulator proporcjonalno – różniczkujący. Regulator proporcjonalno – różniczkująco – całkujący. Zasady budowy regulatorów. Struktura regulatora PD. Struktura regulatora PI. Struktura regulatora PID.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Wykład 9
Stabilność układu Kryteria stabilności
Treść wykładu:Wymagania stawiane układom, warunek stabilności. Stabilność i jakość liniowych układów regulacji. Kryterium Hurwitza. Kryterium Routha. Kryterium Michałowa. Kryterium Nyquista.
Wykład 10
Dobór nastaw regulatora na podstawie kryterium Nyquista. Uchyb statyczny.
Treść wykładu:Dobór nastaw regulatora na podstawie kryterium Nyquista. Reguły Zieglera – Nicholsa. Uchyb statyczny. Korekcja przez kompensacje zakłóceń.
Wykład 11
Wymagania stawiane układom regulacji automatycznej.
Treść wykładu:Układy statyczne i astatyczne. Kryteria jakości w układach liniowych. Kryteria całkowe.
Wykład 12
Synteza układu sterowania. Regulacja dwupołożeniowa. Regulacja kaskadowa.
Treść wykładu:Synteza układu sterowania - tok postępowania. Regulacja dwupołożeniowa – przykłady. Regulacja kaskadowa – przykłady.
Wykład 13
Wybrane zagadnienia programowania sterowników PLC.
Treść wykładu:Budowa i programowanie sterowników FESTO i Simens.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Wykład 14
Komputerowe karty pomiarowe.
Treść wykładu:Rodzaje kart pomiarowych. Stosowane standardy kart pomiarowych. Przetworniki A/C i C/A, budowa, programowanie.
Wykład 15
Sterowanie „rozmyte” (FLC)
Treść wykładu:Wybrane zagadnienia ze sterowania fuzzy- logic.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
LITERATURA DO PRZEDMIOTU:
Athans, Fall: „Sterowanie optymalne” Cypkin: „Układy impulsowe” Y. Takahashi, M.J. Rabins, D. M. Auslander, Sterowanie i systemy dynamiczne, WNT,
Warszawa 1976
M. Żelazny, Podstawy automatyki, WNT 1976 T. Mikulczycki (red.), Podstawy Automatyki, Oficyna Wydawnicza Politechniki
Wroclawskiej, 1998 A. Morecki, J. Knapczyk (ed.), Podstawy robotyki, wyd. III, WNT 1999 T. Kaczorek: „Teoria sterowania i systemów”, Warszawa, Wydaw. Naukowe PWN, 1993,
1996, 1999 Krasowski, Pospieł: „Podstawy automatyki i cybernetyki technicznej Węgrzyn: „Podstawy automatyki” Tou: „Nowoczesna teoria sterowania” D. Holejko Niewczas, W. Kościelny: Zbiór zadań z podstaw automatyki. Skrypt
Politechniki Warszawskiej

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
PYTANIA EGZAMINACYJNEPODSTAWY AUTOMATYKI
1. Omówić podstawowe modele matematyczne stosowane w opisie procesów.2. Relacje w układzie (pojęcia: transmitancja, obserwowalność, sterowalność,
niezmienniczość, wrażliwość, optymalizacja).3. Opisy parametryczne procesów: model przyczynowo-skutkowy, model w
przestrzeni stanu.4. Uogólnione zmienne sygnałowe.5. Uogólnione prawo Kirchoffa.6. Wrotniki energetyczne.7. Klasyfikacja układów sterowania.8. Układy sterowania zwykłego.9. Układy adaptacyjne.10.Układy rozgrywające.11.Typowe wymuszenia.12.Charakterystyki dynamiczne czasowe.13.Klasyfikacja podstawowych właściwości dynamicznych.14.Właściwości obiektów sterowania.15.Układ regulacji.16.Właściwości regulatorów.17.Charakterystyki częstotliwościowe.18.Stabilność układu.19.Kryteria stabilności20.Wyznaczenie charakterystyk częstotliwościowych układu złożonego.21.Dobór nastaw regulatora na podstawie kryterium Nyquista.22.Uchyb statyczny.23.Astatyzm układu.24.Wskaźniki jakości dynamicznej.25.Synteza układu sterowania - tok postępowania.26.Regulacja dwupołożeniowa.27.Regulacja kaskadowa.28.Sterowanie w przestrzeni stanu.29.Sterowanie "rozmyte" (FLC).

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
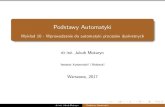
1. RYS HISTORYCZNY
Zestawienie na rys. 1 rzuca światło na pewne tendencje i zdarzenia w dziedzinie rozwoju sterowania w ciągu paru ostatnich stuleci. Na rys. 1 pokazano, w jaki sposób i dlaczego dziedzina ta rozwinęła się właśnie tak.
Okres Rok Teoria sterowania Zastosowanie sterowania Aktualna sytuacja
I. S
ztuk
a
1750
18001850
Artykuł Maxwella.Analiza układu sterowania teleskopu.
Regulator Watta i jego ulepszenie.
Regulatory związane z wytwarzaniem i transmisją energii.
Wiatrak.
Maszyna parowa postęp w pewnych układach mechanicznych
Energia elektryczna.
II. O
kres
prz
ejśc
iow
y
1900 Książka o sterowaniu prędkości. Użycie równań różniczkowych i kryteriów Routha-Hurwitza do pewnych prostych układów.
Metoda Zieglera-NicholsaPodejście przy użyciu metody Laplace'a i metody częstotliwościowej.
Autopilot dla samolotu. Przyrząd i regulatory dla przemysłów przetwórczego i energetycznego.Sterowanie w komunikacji.Serwomechanizm Sterowanie w zastosowaniach wojskowych.Regulatory elektroniczne.Obiekty i procesy ze sterowaniem jako istotnym elementem.
Pierwsza wojna światowa.Postęp w przemyśle.
Druga wojna światowa.
III.
Nau
ka
1950
1970
Metoda miejsc geometrycznychMetoda przekształcenia ZMetoda przestrzeni stanów, metody Lapunowa, teoria sterowania optymalnego i matematyczna teoria dynamiki procesówSzczegółowe analizy sterowań optymalnych
Przetwarzanie danych.
Komputery cyfrowe dla sterowania.Bezpośrednie sterowanie cyfrowe (DDC).
Postęp w kierunku optymalizacji dynamicznej.Rozwój „software"
Energia jądrowa.
Komputery.
Automatyzacja.Projekty kosmiczne. Systemy i koncepcje sterowania w biomedycynie i w różnych innych dziedzinach.Człowiek na Księżycu
Rys. 1 Wybrane wydarzenia w historii rozwoju sterowania
Trzy okresy czasu pokazane na rysunku zajmują prawie tyle samo miejsca wskutek nieliniowej skali czasu, w rzeczywistości mają się do siebie w przybliżeniu jak 9:3:1.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
2. PODSTAWOWE POJĘCIA I TERMINOLOGIA
Przystępując do rozważania problemu definiujemy cel (sterowania). Dla sformułowania reguł decyzyjnych zmuszeni jesteśmy określić model matematyczny
rozważanego problemu. Na podstawie modelu matematycznego przyjmujemy związek przyczynowo-skutkowy
pomiędzy wielkościami sterującymi (wejściami) i sterowanymi (wyjściami). Każdy związek słuszny jest w ściśle określonym zakresie; dokonujemy wyboru tzw. punktu
prac procesu i zakresu zmienności. Dokonujemy wyboru zmiennych (zadanie optymalizacji statycznej) dzieląc je na: wejścia,
wyjścia i parametry. Określamy struktury procesu decyzyjnego (układu sterowania). Określamy kryteria jakości procesu decyzyjnego. Dokonujemy syntezy układu sterowania.
Sterowanie: celowe i świadome oddziaływanie na procesy prowadzące do przyjmowania przez nie ściśle określonych stanów zgodnie z przyjętymi kryteriami jakości.
Sterowanie: proces decyzyjny o ściśle zdefiniowanym charakterze przyczynowo - skutkowym.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
MODELOWANIE MATEMATYCZNE
Należy zdecydować, czy układ można uważać za liniowy, czy też za nieliniowy.
Dla układów liniowych lub linearyzowanych obowiązuje zasada superpozycji, co oznacza, że np. zależność między siłą a przemieszczeniem jest liniowa, jeżeli uzyskane zostało podczas łącznego działania sił i , czyli przy , jest sumą przemieszczeń
i pochodzących od sił i działających oddzielnie.
Znaczenie symboli:
Rozpatrywany proces, tj. zjawisko fizyczne łącznie z aparaturą niezbędną dla jego realizacji.
Sygnał jedno lub wielowymiarowy. Ilustruje przepływ informacji w kierunku wskazanym strzałką.
Węzeł sumacyjny – ilustruje sumowanie sygnałów, zgodnie z równaniem
lub
Węzeł ilustrujący powiązania mnożnikowe
sygnałów
Węzeł ilustrujący powiązania splotowe sygnałów

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
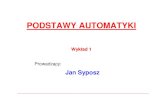
Wybrane klasyfikacje modelowania matematycznego
a)Układliniowy
Masa m i stała sprężyny
niezależne od siły u i
przesunięcia x
Układnieliniowy
k zależy od x
Układ oparametrach skupionych
Masa punktowa i sprężyna bez
masy
Układ o parametrach rozłożonych
Sprężyna z masą
b)Układstacjonarny
m i kniezależnaod czasu
Układ niestacjonarny
m zmienna w czasie
c)
Zmienna determistyczna
Zmienna losowa
d)
Dane próbkowane
Skupienie parametrów układu – proces rozdzielania mierzonych efektów i rozważania układu jako złożonego z elementów idealnych, takich jak idealna masa bez sprężystości i idealna sprężystość bez bezwładności. Przeciwieństwem do modelu skupionego jest model przedstawiony przez pręt sprężysty, zawierający nieskończenie małe elementy bezwładności i sprężystości połączone w szereg.
Układy o parametrach rozłożonych (b) opisywane są za pomocą równań różniczkowych cząstkowych.
Układ, którego parametry zmieniają się w czasie nazywa się niestacjonarnym albo zmiennym w czasie
Charakter zmiennych może być albo zdeterminowany albo przypadkowy (c).
Zmiany zmiennej mogą odbywać się w sposób ciągły w czasie lub też w sposób przerywany dyskretny uzyskany przez próbkowanie. Zmienna próbkowana może przyjmować dowolną wartość w przyjętym zakresie, albo wartości te mogą być ograniczone do pewnych skwantowanych, odrębnych punktów, np. sygnały cyfrowe lub dane kodowe binarne (0,1).

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Złożoność modelu – wynika z celu badań.Sformułowanie problemu i cel badań są ze sobą ściśle związane.
Zależność ogólna układu:
- zależność macierzowa (wektorowa); - wektor wyjść (mierzony); - wektor stanu (wewnętrzna zmienna opisu układu); - wektor sterowania (wejść); - wektor zakłóceń (szumów); - parametry układu; - wskaźnik jakości; - czas.
Relacje w układzie

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
3. MATEMATYCZNE I GRAFICZNE REPREZENTACJE UKŁADÓW DYNAMICZNYCH O PARAMETRACH SKUPIONYCH
Wektor stanu i wektorowe równania różniczkowe
Stan układu charakteryzuje się za pomocą zbioru zmiennych dynamicznych, zwanych zmiennymi stanu. Zmienne te nie są jednoznaczne i stosuje się kilka różnych metod ich wyboru. Wyjście układu definiowane jest jako funkcja liniowa wybranych zmiennych stanu i wejść układu. Dla (układu) równania różniczkowego opisującego pojedynczą zmienną stanu i wejść
:
Odpowiedź:
- stałe współczynniki.
Podane relacje można uogólnić celem zastosowania do układów wyższych rzędów. Dla układu o wejściach i wyjściach mamy wektory:
Wektor wejść Wektor stanu Wektor wyjść
- macierze.
Zależność przyczynową można opisać przy pomocy dwu rodzajów diagramów

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Schemat w postaci wektorowej
Schemat w postaci grafu przepływu

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
4. MODELOWANIE MATEMATYCZNE UKŁADÓW TECHNICZNYCH
Pojecie układu
Pierwszym krokiem od układu fizycznego do modelu matematycznego jest wyodrębnienie tego fragmentu, który nas interesuje.
Tę interesująca część nazywamy układem, a pozostałą część współpracującą z tym układem nazywamy otoczeniem.
Rezystancja, pojemność i indukcyjność
Wygodnie jest traktować podstawowe elementy układów dynamicznych ogólnie, bez konieczności rozróżniania środowiska fizycznego, elektrycznego, płynowego, mechanicznego itp. Jest to możliwe, ponieważ z doświadczenia wiemy że ta sama klasa równań opisuje różne układy dynamiczne.
Formalizację opisu ogólnego rozpoczyna się od zdefiniowania uogólnionych zmiennych sygnałowych i zdefiniowania zbioru elementów podlegających klasyfikacji.
Zmienne sygnałowe:
- potencjał, - przepływ
w każdej chwili ustalają stan wzajemnego oddziaływania energetycznego między dwoma układami lub częściami układów.
Moc układu przenoszona w danej chwili:

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Elementy podstawowe:Rozpraszanie energii: rezystancja - energia opuszczająca układ nie może do niego
powrócić w postaci jakiej go opuściła.
- rezystancja statyczna liniowa.
Przepływ mocy musi odbywać się zawsze w tym samym kierunku niezależnie od kierunku (przepływu):
Rezystor jest elementem pozbawionym odwracalności przetwarzania energii.
Pojemność i indukcyjność – traktowane są łącznie, ponieważ ich relacje są wzajemnie dualne. Są to elementy bezstratnie magazynujące energię.
- element pojemnościowy;
- element indukcyjny.
Ujednolicony opis elementów układu dynamicznego

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
ZASTOSOWANIE DO UKŁADÓW Z PRZEPŁYWEM CIECZYRozsądnym wyborem na zmienne - potencjał i - przepływ, w układach z przepływem cieczy jest ciśnienie (albo wysokość słupa cieczy) i natężenie objętościowe przepływu.Rezystancja – opory tarcia o ścianki lub otwory zwężki. Równania nieliniowe (kwadratowe). Dla oporów zlinearyzowanych uwzględnia się ją szeregowo, przy czym - potencjał jest ciśnieniem a - przepływ jest natężeniem przepływu.
Rezystancja uogólniona: a) przepływ cieczy; b) przepływ gazu; c) wymiana ciepła przez powierzchnię; d) przewodzenie ciepła (lub dyfuzja); e) ogólna wymiana ciepła; f) przenoszenie ciepła (lub substancji) za pośrednictwem nośnika; g) poślizg wału lub przegubu (tarcie lepkościowe); h) tarcie posuwiste (lub coulombowskie)Pojemność – reprezentowana jest przez zbiornik o zwierciadle swobodnym.
Pojemność uogólniona:a) układ cieczowy;b) układ gazowy:c) układ cieplny;d) układ mechaniczny
Indukcyjność – w układach z cieczą odpowiada jej bezwładność cieczy.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Przykład:Rozważmy zbiornik z otworem u dołu, otwarty do atmosfery. Chcemy znaleźć równanie tego układu w zależności od i .
Na pierwszy rzut oka nie wiemy, jakiego rodzaju wielkości mogą być powiązane w punkcie1. Punkt 2 jest punktem przed otworem wylotowym ze zbiornika, a punkt 3 jest punktem za otworem wylotowym w kierunku wypływu. Ciśnienie i przepływ w punkcie 1 są powiązane z ciśnieniem i przepływem w punkcie drugim za pomocą równania:
a stan w punkcie 2 jest powiązany ze stanem w punkcie 3 za pomocą równania:
Możemy połączyć te dwa równania celem otrzymania relacji obejmującej cały układ
Ale , tak że:, ,
czyli:
co jest szukaną relacją.
ZASTOSOWANIE DO UKŁADÓW Z PRZEPŁYWEM GAZU - potencjał – ciśnienie, - przepływ – natężenie objętościowe przepływu – to nie jest optymalne, ze względu na
zmianę gęstości korzystniej przyjąć natężenie masowe przepływu.
Przybliżenie liniowe można stosować dla małych przepływów. Zbiornik pokazany na rysunku
jest w tej analogii pojemnością bocznikową i wobec tego musi być opisany przez równanie:

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
w którym: - i jest ciśnieniem gazu w zbiorniku. Pojemność na podstawie definicji wiąże przepływ masy netto w zbiorniku z przyrostem ciśnienia. Prędkość zmian masy nagromadzonej w zbiorniku jest równa:
Jeżeli jest objętością zbiornika, a objętością właściwą gazu, to
Możemy podstawić to wyrażenie do lewej strony równania , zróżniczkować względem
czasu i następnie posłużyć się tożsamością
W procesie politropowym mamy i dlatego:
czyli
Podstawiając to do równania , otrzymujemy:
Lecz zgodnie z równaniem
Widzimy zatem, że
Jednak (ciśnienie absolutne) i są powiązane równaniem stanu gazu idealnego
przy czym jest stałą gazową, a jest temperaturą absolutną gazu, tak że
Jeżeli proces jest izotermiczny, to i jest stałe i wtedy element pojemnościowy jest liniowy. W innym przypadku jest on nieliniowy z powodu zmian temperatury.
Z powodu ściśliwości gazu indukcyjność szeregowa (bezwładność gazu0 prawie zawsze występuje połączona z pojemnością bocznikową na poziomie mikroskopowym.
4. UKŁADY Z ODDZIAŁYWANIEM WSTECZNYM
Modelowanie układów energetycznych.
Wrota energetyczne – punkt przez, który można przenosić moc pomiędzy układem a otoczeniem. Każde wrota energetyczne przenoszą moc jednego rodzaju. Przenoszenie mocy opisuje się w każdej

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
chwili za pomocą pary zmiennych sygnałowych p, e. Jeżeli moce różnych rodzajów są przenoszone przez ten sam punkt, to dla każdego rodzaju mocy określa się oddzielne wrota.
Rozpatrywane układy – sprzężone, dwukierunkowe tj. układy których struktura zawiera elementy bierne i źródła idealne.
Definicja: wrota energetyczne
Układy lub elementy są sprzęgane poprzez wrota energetyczne.Połączenia pokazuje linia nazywana łączem. Przenosi ono energię z jednego punktu do innego bez rozpraszania i opóźnienia w czasie.
Układ charakteryzuje się w zależności od liczby wrót energetycznych jakie posiada jako jednowrotnik, dwuwrotnik itd.
Przedstawienie graficzne układu, uzyskane przy użyciu łączy i wrót energetycznych nosi nazwę grafu łączy.
Każdy jednowrotnik charakteryzuje się równaniem wiążącym ze sobą jego zmienne i .
Iloczyn tych zmiennych jest przenoszony przez wrota mocy.
Wielkości q i m są wejściami integratorów w grafach obliczeniowych dla kondensatora i dławika idealnego.
Źródła idealne → potencjału, przepływu.
Połączenia dwu– i jednowrotników → wejście jednego musi być wyjściem drugiego lub odwrotnie.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Jednowrotniki

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Zapis przyczynowo - skutkowy
Zapis pokazujący konwencje co do znakuPodstawowe zależności podane w tablicy dla rezystora, kondensatora i dławika idealnego są zdefiniowane co do mocy w taki sposób, że moc jest dodatnia, jeśli wchodzi do elementu. Można to pokazać na grafie połączeń za pomocą grotu strzałki. Pokazany zapis pokazuje konwencję co do znaku mocy (a) i jednowrotnik z pokazanym znakiem mocy i związku przyczynowego.
Połączenia idealnePrototypowym połączeniem idealnym jest trójwrotnik pokazany na rysunku a).
połączenie zerowe połączenie jedynkowe
Bez względu na liczbę wrot, połączenie zerowe musi mieć wejście „p” na jednym i tylko jednym łączu a wejście „e” na innych łączach.
Połączenie jedynkowe musi natomiast mieć „e” na jednym łączu i wejściu „p” na wszystkich innych łączach.
Schemat związków przyczynowych dla łączy zero i jeden
Równoważniki elektryczne łączy idealnych

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
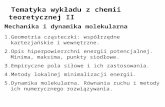
PrzykładModel zawieszenia samochodu. Jeżeli rozważamy tylko ruchy w górę i w dół samochodu, możemy zastosować model „sprężyna-masa-tłumiktłokowy”.
Źródło prędkości reprezentuje zmieniającą się nawierzchnię drogi; dolny człon „sprężyna-tłumik tłokowy" reprezentuje oponę; m1 masę nieresorowaną; górny człon „sprężyna-tłumik tłokowy" przedstawia układ zawieszenia; m2 masę nadwozia i pasażerów. Grafy dla tego układu możemy otrzymać przez połączenie elementów impedancji szeregowej i admitancji bocznikowej. Sprężyna i tłumik tłokowy połączone równolegle są przedstawione za pomocą bardziej złożonego elementu o impedancji szeregowej, pokazanego na rysunku.
Jego macierz transmitancji jest równa:
przy czym
Postępując od dołu do góry (z lewa na prawo na grafie połączeń), otrzymujemy graf połączeń z rys.
Źródło prędkości P jest źródłem potencjału, które zamyka łańcuch przy lewym końcu. Następnie występuje impedancja szeregowa, właśnie wyprowadzona dla układu równoległego „sprężyna-tłumik", po czym pojemność bocznikowa reprezentująca m1 itd. Zakończenie po prawej stronie jest reprezentowane doprowadzoną silą zerową, którą wobec tego można pominąć. Pojemność
prędkość(zmieniająca się
nawierzchnia drogi)
opona
masanieresorowana
układzawieszenia
masanadwozia

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
bocznikowa dla m2 staje się dwuwrotnym łączeni zerowym połączonym z kondensatorem jednowrotnym. Jak pokazano na rysunku:
dwuwrotne połączenie zerowe jest po prostu równoważne łączu. Równoważny obwód elektryczny pokazano na rysunku:
Przykład:Układ sprężyna – masa:
Z poprzednich wykładów wiemy, że masa jest pojemnością bocznikową, a sprężyna indukcyjnością szeregową, a układ można opisać za pomocą następujących macierzy transmitancji:
Potencjał p odnosi się do prędkości, a przepływ f do siły.
Układ sprężyna – masa przerysowany dla bezpośredniego pokazania układu odniesienia dla masy.
Diagram połączeń.
Równoważny obwód elektryczny.

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Przykład:Najłatwiejszym sposobem znalezienia struktury grafu połączeń dla tego układu jest ustalenie najpierw odpowiedniości między elementami impedancji szeregowej i admitancji bocznikowej, a różnymi wielkościami mechanicznymi. Można stosować następujące pary odpowiedniości:
siłaprędkość
masaspręzyna
tłumik tłokowy
potencjałprzepływ (prąd)indukcyjność (m=I)pojemność rezystor (b=R)
Grafy połączeń równoważne elementom mechanicznym z analogią siła-potencjał (a),układ zawieszenia samochodu (b) i obwód równoważny (c)

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Dwuwrotniki(p - prędkość, e - siła)
OBLICZANIE TRANSMITANCJI ŁAŃCUCHA DWUWROTNIKÓW
Postać ogólna:
Jeżeli , są parą wejście – wyjście przy lewym końcu a , są parą przy prawym końcu, to otrzymuje się:

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
np. dla:
prowadzi do równań:
oraz
Transmitancja dwuwrotnika
Łańcuch dwuwotników:wyjścia i

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Transmitancja dla dwuwrotnika

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Łańcuch dwuwrotników

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
LINIE TRANSMISYJNEa)
b)
Macierz wypadkowa:

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Złożone struktury dwuwrotników

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Pary ZY i YZ

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
POŁĄCZENIA TYPU Z Z UKŁADEM TYPU Y
Powstają dwie możliwości: pary ZY i YZ
ZY
YZ
Tworzone łańcuchy:
PRZETWORNIKI I TRANSFORMATORY
Przetwornik – dwuwrotnik przetwarzający energię z jednego środowiska (rodzaju0 do drugiegośrodowiska (rodzaju).
Człony przetwarzające energię (a) i (b), transformator (c) i konfiguracja ogólna (d)
TRANSFORMATORY IDEALNE
- Macierz diagonalna jest postacią kanoniczną transmitancji macierzowej transformatorów idealnych

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Postać atydiagonalna transmitancji macierzowej:
Gyrator (Żyrator)Dwuwrotnik, w którym oba wrota mają to samo medium dla przenoszenia energii, lecz występuje w nim skrzyżowanie potencjału i przepływu.
Idealny silnik płynowy (a), jego reprezentacje przyczynowe przy analogii potencjał – prędkość (b)i przy analogii potencjał – siła (c), silnik płynowy z upływem i tarciem (d)

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
ŻYROSKOP (BĄK)
OT – wał wirujący
Wał porusza się w OT’ (podlega precesji) jeżeli bąk wiruje zgodnie z kierunkiem obrotu wskazówek zegara i na układ działa moment wywołany parą sił W (ciężar bąka i reakcja od podparcia). Prędkość kątowa precesji p:
- moment bezwładności bąka (krążka), - prędkość kątowa bąka.
Prawo momentów Newtona
- wyrażenie wektorowe krętu , ,- wyrażenie momentu zewnętrznego.
Równanie na rysunku bąka pokazane jest w postaci trójkąta wektorów z którego można
wyprowadzić równanie:
z tego równania uzależniamy moment w kierunku x od prędkości kątowej precesji w kierunku y za pomocą równania
- rys. b

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Podobnie w kierunku i w kierunku x są powiązane za pomocą równania:
znak minus pojawia się jako wynik relacji wektorowej pokazanej na rys. c.Łącząc te równania otrzymamy:
Żyroskop prędkościowy – prędkość kątowa pojazdu jest mierzona za pośrednictwem .
Powstrzymany jest ruch wewnętrznego połączenia przegubowego za pomocą sprężyn .
Powoduje to wytworzenia kąta proporcjonalnego do .

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
WIELOWROTNIKI
Trójwrotniki.Równania podstawowe:
zależności impedancyjne ; zależności admitancyjne .
Macierze są symetryczne. Oba wyznaczniki , są zerowe.Właściwości:
(1) suma kolumny = 0
(II prawo Kirchhoffa dla pętli),
(I prawo Kirchhoffa dla węzłów).(2) suma wierszy = 0
Schemat blokowy trójwrotnika

0Wykład
Podstawy Automatykiprof. dr hab. inż. Stanisław Płaska
Trójwrotniki statyczne
Rezystory bocznikowe Rezystory szeregowe
Sch
emat
poł
ącze
ńU
kład
y ni
eele
ktry
czne
Układ ciał stałychUkład płynowy
Ukł
ady
elek
tryc
zne
Rów
nani
a
Napięcia w oczkach: , , Prądy gałęzi: , , , , ,
Prądy w węzłach: , , Prądy gałęzi: , ,