
Viticulture de précision - Vitinnovvitinnov.fr/images/Viticulture_de_precision_Acte2016.pdf ·...
60
Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
-
Upload
trinhtuong -
Category
Documents
-
view
213 -
download
0
Transcript of Viticulture de précision - Vitinnovvitinnov.fr/images/Viticulture_de_precision_Acte2016.pdf ·...

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »


Cette journée technique
est organisée en partenariat avec
le transfert de l’ISVV, Bordeaux Sciences Agro
et le cluster Inno’Vin
Avec le soutien de

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
PROGRAMME
Viticulture de précision : état des lieux après plus de dix ans d’expérience.……………………………………….1
Bruno Tisseyre
Vitidrone, mise au point d’un service de télédétection du vignoble par des drones.………………………....2
David Granger
Développement et application d’un capteur physiologique en Champagne ………………………..…………….7
Olivier Garcia
Adaptation régionale d’un capteur : l’exemple du Physiocap® en Gironde……………………..…………..……12
Séverine Mary
L’utilisation du modèle numérique de surface pour déterminer l’érosion dans les vignes et
l’utilisation des images aériennes pour déterminer la porosité de la vigne.......………………………..……...16
Dorothea Noll
Utilisation des images aériennes à très haute résolution pour documenter des cas d’érosion suite à des événements pluvieux intenses ou récurrents………………………………………………….………………………….20 Dorothea Noll
Etude des variations de sensibilité d’un vignoble contre les principales maladies cryptogamiques de la
vigne ………………………………………………………………………………………………………………………………….…….………24
Marc Raynal
Détection Précoce des maladies fongiques par imagerie hyperspectrale en culture fruitière………..…29
Pierre Vaysse
Dispositif multispectral haute résolution pour la détection de foyers infectieux en vigne par drone.32
Frédéric Cointault
Développement d’un outil d’estimation du rendement de la vigne à la parcelle ………………………….….36
Christian Germain
Les solutions d’aujourd’hui
Les outils de demain




Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
1 McBratney, A., Whelan, B., Ancev, T., and Bouma, J. (2005). Future directions of precision agriculture. Precision Agriculture, 6 :7-23.
Bordeaux Sciences Agro, le 2 février 2016 1/39
VITICULTURE DE PRECISION : ETAT DES LIEUX APRES PLUS DE DIX ANS D’EXPERIENCE
Bruno Tisseyre UMR ITAP, Montpellier SupAgro/Irstea
L'agriculture de précision est un concept qui a émergé au début des années 90 avec l'avènement du
positionnement par satellites. On ne mesure pas à quel point la possibilité de localiser une
observation, une machine ou une action, simplement et n'importe où à la surface du globe a permis
d'envisager de nouvelles pratiques en agriculture. Ces pratiques, comme la modulation de la
fertilisation ou du semis, sont aujourd’hui de plus en plus adoptées à travers le monde. Dix ans plus
tard, au début des années 2000, les premiers travaux de recherche en viticulture de précision
émergeaient dans plusieurs pays de manière concomitante : en France, en Australie et en Espagne.
Ces premières recherches ne se sont pas uniquement focalisées sur le développement de capteurs
spécifiques pour la viticulture, elles se sont aussi focalisées sur l'étude de la variabilité spatiale des
principaux paramètres quantitatifs, de qualité, d'état hydrique, etc. au niveau intra-parcellaire.
Ces travaux ont permis de mettre en évidence la grande variabilité des parcelles viticoles et l'intérêt
de la prendre en compte pour améliorer la gestion de la production viticole. Grâce à cette
connaissance, il a été possible de donner un sens à l'agriculture de précision appliquée à la
viticulture. Suivant la définition donnée par McBratney et al. en 20051, la viticulture de précision peut
donc être considérée comme un type de conduite visant à augmenter le nombre de (bonnes)
décisions par unité d'espace et de temps, ainsi que les bénéfices nets qui y sont associés. En
pratique, la viticulture de précision est ainsi un ensemble de méthodes basées sur l'information et
visant à optimiser les performances d'une exploitation viticole sur plusieurs plans :
technique (maximiser les performances agronomiques de l'exploitation),
économique (optimiser le gain économique de l'exploitation),
environnemental (limiter les impacts des pratiques de l'exploitation).
Grâce à la viticulture de précision, les pratiques agricoles de l'exploitation ont donc vocation à être
optimisées selon chacun de ces plans en se basant sur la prise en compte des variabilités spatiales et
temporelles que peut présenter l'outil de production. La détection de ces variabilités est assurée par
les moyens issus des sciences de l'information (capteurs, au sens large du terme). Cette définition
montre à quel point, le capteur et la donnée qui en découle sont au cœur du système. Il s'agit d'un
domaine en constante évolution où des progrès technologiques constants permettent d'accéder
toujours plus facilement (et à moindre coût) aux observations avec des résolutions spatiales et
temporelles de plus en plus fines. Les innovations dans le domaine des capteurs permettent
également d'accéder à de nouvelles observations. C'est le cas par exemple de l'hyperspectral, du
thermique, mais aussi d'autres sources d'informations comme le terrahertz, la 3D qui devient
facilement accessible grâce à la photogrammétrie par drone.
Ce contexte en pleine évolution justifie de nouvelles recherches pour étudier l'intérêt applicatif de
nouvelles sources d'observations en viticulture. Il justifie également l'intérêt de journées techniques
comme celle organisée par Vitinnov qui permet de réunir une communauté de scientifiques et de
professionnels afin de faire un point sur les avancées en matière de capteurs appliqués à la
viticulture, les développements en cours dans ce domaine ainsi que les perspectives applicatives
envisageables à court ou moyen terme.


Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
1Vitivista, Fly-n-Sense, Vitinnov, Specterra, Bordeaux Sciences Agro et trois propriétés viticoles.
Bordeaux Sciences Agro, le 2 février 2016 2/39
VITIDRONE : MISE AU POINT D’UN SERVICE DE TELEDETECTION DU VIGNOBLE PAR DES DRONES
D. Granger1, S. Mary1, C. Laveau1, G. Darrieutort1, B. Keresztes2 et C. Germain2
1
Vitinnov, Bordeaux Sciences Agro, ISVV, 1 cours du General De Gaulle, 33170 Gradignan 2
Université de Bordeaux, IMS UMR 5218, 33400 Talence
Contact : David Granger. Email : [email protected]
Introduction Depuis une vingtaine d’années, l’agriculture de précision vit un essor accru, facilité par le
développement de nouvelles technologies et de nouveaux procédés comme la miniaturisation des
capteurs ou l’automatisation des mesures. Toutefois l’adaptation de ces outils en viticulture est plus
lente car confrontée aux spécificités même de cette culture : pérenne, organisée en rangs et gérée
en parcelles de petite taille.
Durant les quatre dernières années, une technologie à maturité semble tirer son épingle du jeu, avec
la création de nombreuses sociétés commerciales : le drone. L’enjeu actuel pour ces sociétés est de
définir les applications les plus adaptées à cet outil capable d’acquérir des images à haute, voire très
haute, résolution spatiale et temporelle.
C’est dans ce contexte mouvant et dynamique, et sous l’impulsion du cluster Inno’Vin, que le projet
VITIDRONE, porté par la société Vitivista, a vu le jour en 2012, avec comme objectif d’apporter un
service de télédétection réactif, précis et peu couteux à partir de drones autonomes à l’échelle d’une
exploitation viticole.
Ce projet multipartenaires1 s’est dans un premier temps focalisé sur la caractérisation de la vigueur
grâce au Normalized Difference Vegetation Index (NDVI) en s’articulant autour de 3 axes :
l’adaptation de capteurs performants à intégrer sur les drones, l’amélioration de l’interprétation des
outils de télédétection et la proposition de services à partir d’une plateforme web interopérable.
Le travail présenté aujourd’hui se concentrera sur les mesures mises en place pour répondre aux
trois questions principales qui se sont posées pour valider la solution proposée :
- L’algorithme de traitement des images est-il adapté aux spécificités viticoles ?
- Quelles sont les données agronomiques corrélées aux cartes de vigueur produites ?
- Les gains attendus par l’utilisation du drone sont-ils vérifiés ?
Mise en place de l’expérimentation et choix des indicateurs
L’expérimentation a été réalisée entre 2012 et 2015 sur un total de 12 parcelles mises à disposition
par trois châteaux partenaires. Parmi les mesures possibles pour caractériser la vigueur de la vigne
et/ou les causes de celles-ci, les mesures suivantes ont été choisies :
- L’indice N-tester, indice chlorophyllien permettant d’estimer l’azote foliaire pendant la
saison en valeur relative,
- La Surface Externe du Couvert Végétal (SECV), méthode qui mesure le volume de végétation
(Murisier F., 1996),
- Le poids de récolte, indicateur de biomasse complémentaire aux pesées de bois de taille,
- Le poids des bois de taille, qui définit la biomasse produite par la vigne dans l’année écoulée
(Champagnol F., 1984).

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 3/39
Ces mesures agronomiques ont été réalisées sur un nombre de ceps représentatifs de la variabilité
intra-parcellaire (environ 1% des ceps), soit entre 50 et 75 ceps selon la taille des parcelles. Les
résultats de ces mesures de terrain ont été comparés aux valeurs de NDVI acquises à partir d’images
aériennes obtenues avec un vecteur avion et/ou un vecteur drone.
Ces images brutes ont été produites avec une précision de 25 cm à 10 cm pour l’avion et 2,5 cm pour
le drone. L’extraction des données NDVI a été réalisée grâce à des logiciels de cartographie adaptés.
Il est intéressant de noter que les algorithmes d’analyse d’images issus de la technologie drone ont
été développés spécifiquement pour le projet. Le réel gain de ces algorithmes est la prise en compte
d’une donnée supplémentaire par rapport aux données avion : l’altitude, facilitant la création d’un
modèle numérique de surface.
Validation agronomique de la solution
Comparaison des algorithmes
Les deux partenaires du projet dédiés à l’analyse des images (Specterra et BSA) ont utilisé et mis à
disposition du consortium deux algorithmes différents pour mener à bien cette étude. La différence
principale entre les deux réside dans la méthode d’isolement de la donnée NDVI recherchée.
Afin de connaitre leur efficacité, isoler l’algorithme le plus performant et favoriser un développement
mutuel de la solution, nous avons débuté notre étude par une comparaison de ces deux algorithmes.
Tableau 1: Comparaison des algorithmes BSA et Specterra selon le vecteur (avion/drone) et par
parcelle en fonction de la relation NDVI / poids de bois de taille de l’année 2014. Les données
présentées sont issues des R2 obtenus par régression linéaire.
Relation NDVI / Poids bois de taille (R2)
Avion Drone
Parcelle Cépage BSA Specterra BSA Specterra
p1 Cabernet S 0,85 0,87 0,87 0,73
p2 Petit Verdot NS 0,37 NS NS
p3 Merlot 0,61 0,64 0,77 0,67
p8 Merlot 0,74 0,73 0,60 0,65
p9 Merlot 0,59 0,65 0,69 0,60
p10 Cabernet S NS NS 0,80 0,83
p11 Cabernet S NS NS 0,67 0,29
Les deux algorithmes présentent des résultats très proches (Tableau 1). Pour l’acquisition avion, la
méthode Specterra est légèrement meilleure dans 57% des cas et similaire à celle de BSA dans 29%.
Pour le drone, la tendance s’inverse puisque BSA propose de meilleures corrélations dans 57% des
cas et similaires dans 29%.
Malgré de très fines différences et dans la majeure partie des cas, les deux algorithmes étudiés
fonctionnent de manière fiable et similaire. Nous avons donc choisi, dans ce document, de vous
présenter les résultats issus de l’algorithme Specterra.
L’algorithme de traitement des images est-il adapté aux spécificités viticoles ?
La configuration des parcelles de vigne conduites avec un système de production en rangs oblige à
avoir un traitement de l’image performant, permettant d’isoler les informations propres à la vigne.
Les algorithmes utilisés doivent donc permettre de s’affranchir des données sols, et notamment de
l’enherbement.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 4/39
Tableau 2 : Etude de la relation entre les données NDVI (avion, algorithme Specterra) et le poids des
bois de taille par modalité enherbée / travaillée. Les données présentées sont issues des R2 obtenus
par régression linéaire.
Relation NDVI / Poids bois de taille (R²)
Travaillé Enherbé
2012 p4 vs p5 Cabernet S 0,87 0,61
p6 vs p7 Merlot NS NS
2014 p9 vs p8 Merlot 0,65 0,73
p11 vs p10 Cabernet S NS NS
L’effet parcellaire semble plus fort que l’effet de l’enherbement sur la possibilité d’établir une
corrélation entre le NDVI et la pesée des bois de taille (Tableau 2). Lorsque la relation est significative
sur un cépage et une propriété, elle l’est que le sol soit travaillé ou enherbé. Inversement si aucune
corrélation significative n’a pu être établie, cela est le cas quel que soit le travail du sol réalisé.
Il semble donc que les deux algorithmes soient en mesure de traiter les images en éliminant les
données issues de l’inter rang et que, par conséquent, les valeurs de NDVI obtenues soient
principalement issues de pixels isolés à partir de la végétation « vigne ».
Quelles sont les données agronomiques corrélées aux cartes de vigueur produites ?
La réponse à cette question nécessite d’isoler les indices de vigueur ou de causes de la vigueur
associés aux données cartographiques proposées.
Tableau 3 : Etude de la relation entre les données NDVI (avion, algorithme Specterra), le poids des
bois de taille, le poids de récolte et le N-tester par parcelle en 2012. Les données présentées sont
issues des R2 obtenus par régression linéaire.
Année Parcelle Cépage Relation NDVI / Poids
bois de taille (R²)
Relation NDVI /
poids de récolte (R²)
Relation NDVI /
N-tester (R²)
2012
p1 Cabernet S 0,46 0,57 NS p2 Petit verdot 0,89 0,42 0,65
p3 Merlot 0,87 0,80 0,74
p4 Cabernet F 0,87 0,34 NS
p5 Cabernet F 0,61 NS NS
p6 Merlot NS NS NS
p7 Merlot NS NS NS
Tableau 4 : Etude de la relation entre les données NDVI (avion, algorithme Specterra), le poids des
bois de taille, le N-tester et la SECV par parcelle en 2014. Les données présentées sont issues des R2
obtenus par régression linéaire.
Année Parcelle Cépage Relation NDVI / Poids
bois de taille (R²)
Relation NDVI / N-
tester (R²)
Relation NDVI /
SECV (R²)
2014
p1 Cabernet S 0,87 NS 0,75 p2 Petit verdot 0,37 NS NS
p3 Merlot 0,64 NS NS
p8 Merlot 0,73 0,24 NS
p9 Merlot 0,65 0,45 NS
p10 Cabernet S NS NS NS
p11 Cabernet S NS NS NS
Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 5/39
Grâce aux analyses statistiques réalisées entre les données NDVI et les mesures agronomiques de
terrain (Tableaux 3 et 4), nous pouvons dire que la pesée de bois de taille est mieux corrélée aux
cartes produites par Specterra que l’indice N-tester, le poids de récolte ou la SECV.
En effet la relation NDVI/poids de bois de taille est positive dans 70% des cas avec un R2 compris
entre 0.37 et 0.89. Marguerit E. et al. (2006) avaient déjà montré une relation positive entre cet
indicateur et le NDVI (R2 de 0.47). L’algorithme utilisé dans notre étude permet d’améliorer cette
corrélation dans la majorité des cas.
Une relation dans 57% des cas a été établie avec la pesée de récolte (0,34<R2<0,80), deuxième
indicateur de biomasse, tandis qu’une relation n’a été établie que dans 29% des cas avec l’indice N-
tester (0,24<R2<0,74).
Pour la SECV, la corrélation n’atteint que 14% des cas, principalement à cause de la différence entre
les deux méthodes d’estimation : une acquisition d’image verticale (mesure de la canopée) et des
mesures agronomiques horizontales (mesure de la porosité).
Ces mesures valident le fait que les cartes étudiées sont la représentation de la vigueur de la vigne
par l’intermédiaire de la biomasse produite dans l’année, et non le reflet d’une cause de la vigueur
telle que l’alimentation azotée.
De fait, les conseils agronomiques qui peuvent être formulés à partir des cartes produites doivent
être similaires à ceux émis à partir des pesées de bois de taille, et peuvent donc se traduire, par
exemple, par une adaptation de la fertilisation azotée et/ou de la taille.
Toutefois, il est important de noter que la corrélation de ces même cartes avec un indice de vigueur
mesuré en saison (et non en fin de saison comme la pesée des bois de taille) serait intéressante afin
d’envisager des conseils de gestion en cours d’année et non pas uniquement d’une année sur l’autre.
Les gains attendus par l’utilisation du drone sont-ils vérifiés ?
En comparant les cartes de vigueur acquises par avion à celles acquises par le drone, nous avons
tenté d’observer les bénéfices de cette nouvelle technologie. L’utilisation de la haute résolution voire
de la très haute résolution permet-elle de gagner en information ? Est-on capable de l’utiliser pour
des accompagnements agronomiques ?
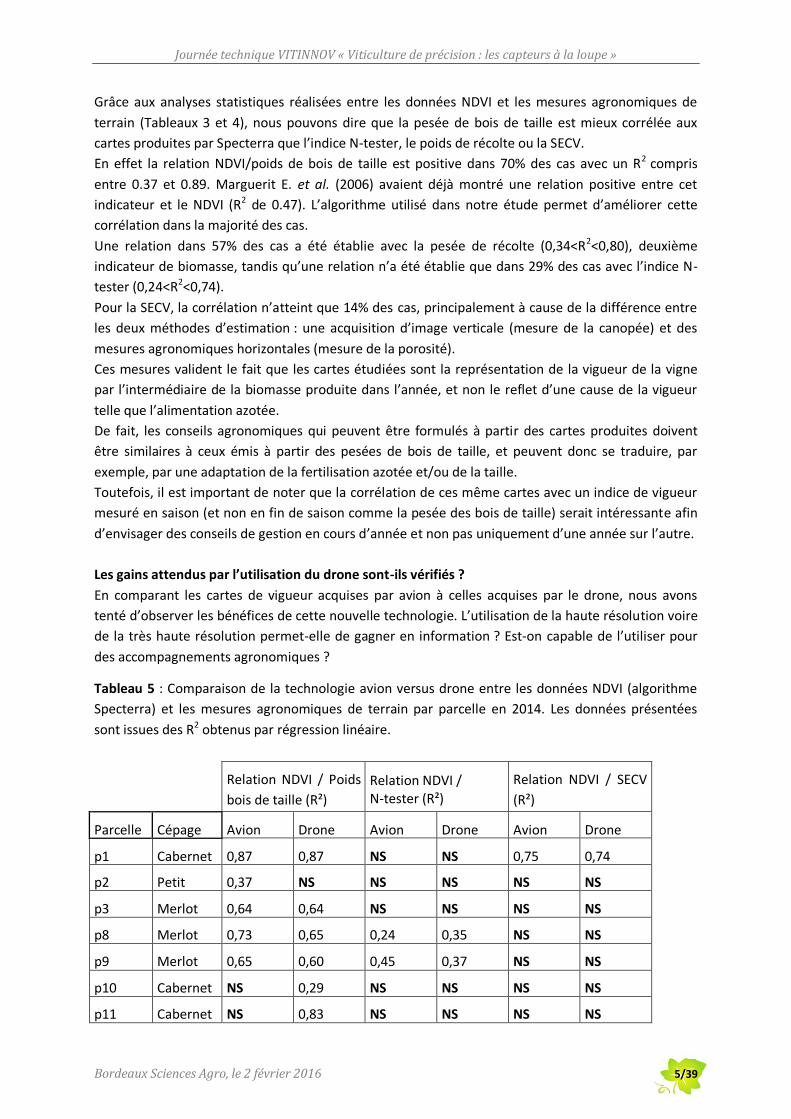
Tableau 5 : Comparaison de la technologie avion versus drone entre les données NDVI (algorithme
Specterra) et les mesures agronomiques de terrain par parcelle en 2014. Les données présentées
sont issues des R2 obtenus par régression linéaire.
Relation NDVI / Poids
bois de taille (R²)
Relation NDVI / N-tester (R²)
Relation NDVI / SECV
(R²)
Parcelle Cépage Avion Drone Avion Drone Avion Drone
p1 Cabernet
S
0,87 0,87 NS NS 0,75 0,74
p2 Petit
verdot
0,37 NS NS NS NS NS
p3 Merlot 0,64 0,64 NS NS NS NS
p8 Merlot 0,73 0,65 0,24 0,35 NS NS
p9 Merlot 0,65 0,60 0,45 0,37 NS NS
p10 Cabernet
S
NS 0,29 NS NS NS NS
p11 Cabernet
S
NS 0,83 NS NS NS NS

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 6/39
Les données issues d’une acquisition d’images par drone ne mettent pas en évidence un gain de
précision flagrant par rapport à l’avion (Tableau 5). En effet, pour les trois indicateurs agronomiques
confondus, les coefficients de corrélation sont similaires entre l’avion et le drone dans 62% des cas.
Le drone est plus précis dans 14% des cas et moins précis que l’avion dans 24% des cas mais il permet
d’obtenir des corrélations sur 2 parcelles où aucune relation significative n’a pu être mise en
évidence avec l’avion (p10 et p11).
Nous avons observé que la technologie drone apporte un gain de résolution manifeste sur l’image
brute même s’il n’est pas possible de le valoriser à l’heure actuelle sur la base des indicateurs choisis.
De plus les données drones permettent d’isoler une donnée supplémentaire à l’avion : la hauteur de
végétation, permettant la création d’un modèle numérique de surface. Ces données pourraient être
intéressantes pour un suivi en saison du développement végétatif.
Afin de compléter la comparaison de ces deux technologies, il serait intéressant d’y intégrer les
notions de réactivité de déploiement, de multi temporalité et de coût.
Conclusion
L’analyse des données sur les trois premières campagnes (2012-2014) nous a permis de répondre aux
trois questions principales cherchant à valider la solution. D’abord, les deux algorithmes utilisés
présentent des résultats similaires et fiables, tout en prenant en compte les spécificités viticoles, et
notamment l’enherbement. Ensuite, la pesée des bois de taille est l’indicateur le mieux corrélé aux
cartes produites ; les conseils agronomiques associés devront donc s’appuyer sur ce dernier. Enfin,
contrairement à ce que nous avions envisagé, la technologie drone n’apporte pas de gain de
précision manifeste par rapport à l’avion en termes de corrélation avec les indicateurs étudiés. Par
contre, les cartes fournies par le drone sont aussi précises que l’avion et des avantages du drone non
quantifiés dans l’étude laissent envisager qu’il existe à la fois une marge de progression avec ce
vecteur et de nouvelles applications tout au long de la saison.
De manière globale, des interrogations persistent quant à la répétabilité des résultats et la
modulation des conseils agronomiques pouvant accompagner la réalisation des cartes NDVI au cours
de la saison végétative. C’est pourquoi une ultime campagne d’acquisitions et d’analyses a été
réalisée en 2015 avec pour objectif d’affiner ces derniers aspects.
Aujourd’hui, la solution Vitidrone issue de ce projet apporte donc aux viticulteurs des cartes de
vigueur de haute résolution. Les validations agronomiques réalisées permettent leur interprétation
en fixant les limites de celle-ci.
Références bibliographiques
CHAMPAGNOL F., 1984. Eléments de physiologie de la vigne et de viticulture générale.
MARGUERIT E. et al. 2006. La télédétection à haute résolution pour spatialiser les variations intra-
parcellaires de la vigueur de la vigne.
MURISIER F., 1996. Optimalisation du rapport feuille-fruit de la vigne pour favoriser la qualité du
raisin et l'accumulation des glucides de réserve. Thèse de doctorat, ETH Zürich, 132p.
Remerciements Les partenaires du projet tiennent à remercier les châteaux ayant mis à disposition des parcelles pour la
réalisation de l’étude ainsi que le conseil régional d’Aquitaine pour son soutien financier.


Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 7/39
MODULATION DE LA FERTILISATION, DE L’ENHERBEMENT ET DE LA TAILLE AVEC LE CAPTEUR “PHYSIOCAP®”
O. Garcia1, S. Debuisson1, C. Monget1, D. Moncomble1 1Comité Champagne (CIVC), EPERNAY, France
Contact : O. Garcia. Email : [email protected]
Résumé
Un capteur de bois de taille (Physiocap®) a été conçu et développé par le CIVC. Physiocap® est un
capteur embarqué utilisé pendant la saison de dormance pour caractériser la biomasse de la vigne en
mesurant la section des sarments et leur nombre. Le capteur peut cartographier la variabilité spatiale
intra-parcellaire, inter-parcellaire et inter-annuelle. Il est aujourd’hui adopté par de nombreux
acteurs de la filière en Champagne et en France. Il permet d’adapter les pratiques de taille, de
fertilisation et d’enherbement, en fonction des objectifs de récolte désirés.
Mots clés: Physiocap®, hétérogénéité, gestion de la taille, fertilisation, enherbement.
Introduction
La taille de la vigne, effectuée chaque année, permet d’agir sur sa vigueur et son expression
végétative. Ces deux paramètres impactent fortement la quantité et la qualité des raisins produits.
En hiver, la mesure des poids de bois de taille est une pratique agronomique reconnue par la filière
viticole pour caractériser l’expression végétative des parcelles, mais peu pratiquée par les viticulteurs
en raison de sa pénibilité et de son temps de mise en œuvre. Le capteur Physiocap®, inventé par le
Comité Champagne (CIVC), est un capteur optique capable de mesurer la section des bois et leur
nombre. Le traitement des données permet de visualiser l’hétérogénéité spatiale existante afin de la
prendre en compte pour moduler les pratiques de taille, d’enherbement et de fertilisation. L’objectif
de cet article est de présenter ce capteur, pouvant avantageusement remplacer la mesure
agronomique des bois de taille, de par sa facilité d’utilisation et le fait qu’il fournit les deux
composantes unitaires de cette biomasse que sont le nombre et le diamètre des bois.
Matériel et méthodes
Fonctionnement du capteur Physiocap®
Le capteur Physiocap® est un système d’acquisition de données géolocalisées, embarqué sur
machine mobile, fournissant des mesures prises sur les bois de taille de la vigne au cours de la
période de repos végétatif (absence de feuilles). Le système est composé d’un micromètre laser, d’un
GPS et d’un boîtier d’acquisition de données pouvant être monté sur tout type de machine mobile.
La mesure peut être réalisée en parallèle de travaux viticoles (prétaille). Le micromètre laser est
composé d’un émetteur et d’un récepteur positionnés face à face, au-dessus du fil lieur (Figure 1). La
mesure des diamètres de bois passant dans le champ laser est instantanée, indépendante de la
vitesse d’avancement et indépendante de la distance des bois par rapport au capteur. Au final, le
capteur Physiocap® fournit une information de section et un comptage du nombre de bois, chaque
seconde. A partir de ces deux paramètres, un calcul permet d’estimer la biomasse (Coussy ; 2013).

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 8/39
Figure 1 : capteur, montage sur chenillard et mesure sur taille chablis en Champagne.
Description de la parcelle d’étude de la variabilité intra-parcellaire
La parcelle d’étude, dite parcelle « terroir », fait partie du domaine expérimental de Plumecoq, situé
à Chouilly, dans la Marne. Elle s’étend sur 0,7 hectares, est divisées en trois blocs selon la pente et
est plantée en carré latin avec les trois cépages majoritaires de Champagne (Chardonnay, Pinot noir
et Meunier). L’hétérogénéité de la parcelle a été mesurée grâce au capteur Physiocap®, au cours des
hivers 2011/2012 à 2015/1016.
Description du secteur d’étude inter-parcellaire
Un secteur d’étude de 300 hectares, situé sur les communes de Chavot-Courcourt, Courcourt et
Monthelon (Marne), a été choisi pour étudier la variabilité inter-parcellaire mesurée par le capteur
Physiocap®. Le but est de développer l’arborescence décisionnelle aval au capteur, en se projetant
dans la situation d’un vigneron dont l’exploitation est composée de parcelles disjointes et souhaitant
raisonner la gestion de son parcellaire en fonction d’indicateurs objectifs. Neuf parcelles réparties sur
le secteur ont été mesurées chaque hiver depuis 2013-2014. Ces 9 parcelles représentent un éventail
de situations champenoises vis-à-vis de l’encépagement, de l’exposition, des types de sols et de la
pente.
Description de la parcelle d’étude inter-annuelle
Cette parcelle d’étude, dite parcelle « collection Meunier » fait également partie du domaine
expérimental de Plumecoq. Elle couvre une surface de 0,4 hectares, et est divisée en plusieurs blocs.
L’encépagement est constitué d’une collection de clones de Meunier. La plantation date de 2007. La
parcelle a été conduite de manière homogène depuis sa plantation. La parcelle montrant une
certaine hétérogénéité intra-parcellaire, confirmée par la mesure Physiocap® effectuée au cours de
l’hiver 2011-2012, il a été décidé d’adapter l’apport d’engrais en fonction des zones déterminées
cartographiquement. Lors des apports du printemps 2012 et 2013, le conducteur du tracteur
apportant les fertilisants a adapté la vitesse d’avancement afin d’effectuer un apport différentiel en
fonction des zones. L’engrais apporté sous forme de bouchons est de type organo-minéral, et se
minéralise donc en grande partie au cours de l’année d’apport.
Résultats et discussion
Etude de la variabilité intra-parcellaire
La figure 2 montre l’amplitude de la variabilité intra-parcellaire de la parcelle « terroir » pour le
paramètre biomasse, mais également pour ses deux composantes constitutives que sont le nombre
de sarments par m² et la section moyenne, pour la saison de taille 2013/2014. Nous constatons que,
systématiquement, le haut de la parcelle présente des valeurs plus faibles que le bas. Le nombre de
sarments par m² varie du simple au double et le diamètre de 20%. Conséquence de la variabilité des
deux précédentes variables, la biomasse varie quant à elle quasiment du simple au triple (figure 2).

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 9/39
Ces cartes sont très parlantes lorsqu’elles sont confrontées à la connaissance empirique des parcelles
qu’a le vigneron. Elles constituent un intéressant support d’échange, facile d’accès pour l’ouvrier
comme pour le responsable technique.
Figure 2 : cartographies de la variabilité intra-parcellaire du nombre de sarments/m², de la section
moyenne des bois et de la biomasse, mesurés par Physiocap® au cours de la saison de taille
2013/2014.
L’hétérogénéité intra-parcellaire est principalement expliquée par la position altitudinale sur le
coteau. On observe un gradient altitudinal de biomasse décroissant. La biomasse mesurée dans le
bloc du bas est toujours supérieure au bloc du milieu, elle-même supérieure au bloc du haut. Cela
s’explique par les différences d’itinéraire hydrique de haut en bas. Le haut de la parcelle s’assèche
plus vite que le bas, du fait des transferts latéraux qui retardent la survenue d’épisodes de contrainte
hydrique sur le bas (Eteneau 2010). L’étude objectivée par la mesure Physiocap® montre qu’une
hiérarchisation des zones « haut », « milieu » et « bas » du coteau se vérifie chaque année, malgré
des conditions pédoclimatiques présentant des variations interannuelles fortes. Le capteur
Physiocap® permet donc d’établir une caractérisation fonctionnelle de la parcelle en se basant sur la
plante en tant qu’intégrateur du milieu et propose ainsi une nouvelle méthode de caractérisation du
terroir.
Etude de la variabilité inter-parcellaire
La figure 3 montre comment l’utilisation de Physiocap® permet de gérer les objectifs de rendement
et de vigueur à l’échelle d’une exploitation viticole, en se basant sur l’observation de la variabilité
inter-parcellaire. Ce type de raisonnement est transposable sur de petites exploitations, comme sur
les plus grandes Maisons de champagne devant gérer plusieurs centaines voire milliers de parcelles.
La suite du paragraphe propose une analyse de plusieurs cas types sur cette exploitation virtuelle.
Une parcelle trop vigoureuse, développant une biomasse excessive, engendre souvent une récolte de
moindre qualité (baisse de maturité, botrytis). Afin de réduire la vigueur et le nombre de sarments, il
pourra être envisagé un arrêt des fertilisations et l’application d’une contrainte azotée à travers
l’implantation d’un couvert enherbé concurrentiel pour les parcelles #3, #6, #7, #8 et #9. Au
contraire, une parcelle de faible vigueur s’affaiblira progressivement si on laisse trop de bourgeons à
la taille (parcelle #1). On pourra alors envisager de raccourcir la taille afin de répartir la biomasse
potentielle sur moins de bois la saison suivante. On voit le résultat que peut donner cette action, sur
les mesures effectuées sur la parcelle #2. Pour ces 2 parcelles, on pourra apporter progressivement
une fertilisation adaptée, permettant de conserver la vigueur retrouvée pour ensuite pouvoir
allonger progressivement la taille et augmenter le rendement vers un objectif fixé. La parcelle #5 est
intéressante car la vigueur est forte et le nombre de bois faible. La taille pourrait être allongée afin
de répartir la biomasse potentielle sur plus de bourgeons, qui donneront donc des bois de moindre
vigueur. On augmenterait ainsi le rendement, tout en abaissant le risque botrytis. Voilà le type de

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 10/39
raisonnement que l’on peut tirer de l’utilisation du Physiocap® à l’échelle d’une exploitation. Ces
informations seront bien évidemment à croiser avec les autres paramètres décisionnels comme
l’analyse de terre ou les suivis de maturation et de rendement, mais il apparaît que les décisions
concernant les pratiques de taille, de fertilisation ou d’enherbement pourront être largement
guidées par cet outil.
Figure 3 : valeurs moyennes des trois paramètres nombre de sarments, diamètre et biomasse pour
chaque parcelle d’une exploitation viticole virtuelle.
Etude de l’évolution interannuelle
Un grand intérêt de la mesure par capteur est la répétabilité (Coussy ; 2013), l’objectivité, et la
possibilité d’archiver plusieurs années de mesures. Avant Physiocap®, ni la pesée de bois de taille, ni
l’observation humaine, ne permettaient réellement de suivre l’évolution diachronique de l’équilibre
physiologique d’une parcelle. Le suivi interannuel va permettre de suivre l’impact du climat et de
l’adaptation des pratiques d’enherbement, de taille ou de fertilisation. Par exemple, la figure 4
montre l’évolution, de fin 2011 à fin 2013, du paramètre biomasse pour la parcelle « collection
Meunier ». On observe en fin de saison 2011, une certaine hétérogénéité intra-parcellaire, pour ce
paramètre mais également pour les paramètres vigueur et nombre de sarments, non présentés ici.
Lors de l’apport des fertilisants, début 2012 et début 2013, la vitesse du tracteur apportant l’engrais,
a été ralentie sur les zones les plus faibles, et accélérée sur les zones les plus fortes. Ce moyen
simple, bien qu’artisanal, d’adapter les doses d’engrais, a permis de réduire la variabilité, en deux ans
seulement, en ne jouant que sur le levier de la fertilisation. Le ratio de la valeur de la zone la plus
élevée sur la valeur de la zone la plus faible, passe ainsi de 2,50 à 1,89 pour la biomasse, de 1,30 à
1,18 pour la vigueur et de 1,80 à 1,62 pour le nombre de sarments, entre fin 2011 et fin 2013. Le
futur développement d’épandeurs d’engrais, capables d’adapter la dose en fonction des
cartographies, permettra un arrêt total des fertilisants sur les zones vigoureuses et un apport
augmenté dans les zones faibles. On se place bien entendu dans le cas où la diminution de la
variabilité intra-parcellaire est recherchée.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 11/39
Figure 4 : évolution pluriannuelle de la biomasse sur la parcelle « collection Meunier ». Les apports
fertilisants ont été adaptés en fonction de zones déterminées par cartographie.
Conclusion et perspectives
Physiocap® est un outil novateur qui apporte une nouvelle vision du développement végétatif de la
plante et qui se montre pertinent pour aider le responsable de vignoble à prendre ses décisions en
termes de fertilisation, de taille et d’enherbement des parcelles. L’édition de cartes, ou de
graphiques, dont les données ont un fort lien avec le terrain, permet de partager sur des bases
objectives, quantitatives et exhaustives avec tous les acteurs de la filière. Les étapes à venir
concernent l’établissement de bases de données de référence permettant d’établir des règles de
décision, notamment à travers la quantification progressive de la réponse du végétal, aux
adaptations de la taille, de la fertilisation et de l’enherbement. L’outil s’adresse donc aux plus grosses
structures de négoce, possédant plusieurs tracteurs pouvant être équipés, et disposant en interne
d’un service R&D capable de traiter la donnée, ainsi qu’aux vignerons indépendants qui pourront
faire appel à des prestataires, aussi bien pour le passage du capteur lors d’opérations de prétaille,
que pour le traitement des données, voire pour le conseil agronomique qui en découle. Ce type
d’outils lève aujourd’hui beaucoup de questions et constitue une très bonne base de discussion
agronomique. La machine ne doit pas remplacer l’homme mais peut l’aider à comprendre pour
mieux décider.
Bibliographie COUSSY R. 2013. Evaluation de la vigueur de la vigne et analyse de sa variabilité inter et intra-parcellaire à partir d’un capteur embarqué mesurant les bois de taille, Mémoire d’ingénieur. Montpellier SupAgro, p17.
DEBUISSON S., MORLET M., PANIGAI L., MONCOMBLE D. 2012(a). Avancées en viticulture de précision, incidence sur la pulvérisation. AFPP – CIETAP.
DEBUISSON S., MORLET M., GERMAIN C., GARCIA O., PANIGAI L., MONCOMBLE D. 2012(b). Utilisation de capteurs embarqués pour cartographier la variabilité de la vigne et caractériser les itinéraires culturaux. IXe congrès des Terroirs vitivinicoles, Dijon et Reims, France.
ETENEAU E. 2010. Etude spatio-temporelle du fonctionnement d’une parcelle de vigne en Champagne. Mémoire d’ingénieur. Montpellier SupAgro, p32.
GERMAIN C., GEORGET C., GARCIA O., DESCOTES A., PANIGAI L., MONCOMBLE D. 2010. Fertilisation et entretien des sols : quelles sont les conséquences agronomiques de nos pratiques sur le long terme ? Le Vigneron Champenois, mars 2010, n°3, 29-63.
TISSEYRE B., SAUCIER J. 2008. An overview of methodologies and technologies for implementing precision agriculture in viticulture. Actes des XII congresso Brasileiro de viticultura e enologia, 45-54.
TISSEYRE B., TAYLOR J. 2005. Viticulture de précision : variabilité spatiale et stabilité temporelle des paramètres quantitatifs à un niveau intra-parcellaire. Le progrès agricole et viticole, 22, 481-487.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 12/39
VALIDATION AGRONOMIQUE ET ADAPTATION DU CAPTEUR PHYSIOCAP® EN GIRONDE
S. Mary1, D. Granger1, G. Darrieutort1, JP. Roby2, C. Laveau1 1 Vitinnov, 1 cours du général De gaulle, 33170 Gradignan 2 Bordeaux Sciences Agro, 1 cours du général De gaulle, 33170 Gradignan
Contact : Séverine Mary. Email : [email protected]
Le Physiocap® est un capteur développé par le Comité Interprofessionnel des Vins de Champagne.
C’est un système d’acquisition de données géolocalisées embarqué sur une machine (enjambeur,
chenillard,…) fournissant des informations sur les bois de taille. En période hivernale et donc en
absence de feuilles, il permet de compter le nombre de sarments et de mesurer leurs diamètres
permettant ainsi d’estimer un indice de biomasse. Le capteur est composé d’un laser comportant un
émetteur et un récepteur et chaque fois qu’un sarment passe devant le faisceau, celui-ci est rompu.
La section d’interruption du laser correspond à la section du rameau et est assimilée à son diamètre.
Le Physiocap® est recommandé pour raisonner les pratiques de taille, de fertilisation et
d’enherbement de la vigne dans le cadre d’une gestion inter ou intra-parcellaire (Le vigneron
Champenois, décembre 2014). Il a été validé en Champagne et est maintenant commercialisé par
différents distributeurs. La validation agronomique n’a cependant pas été réalisée dans d’autres
régions viticoles en prenant les spécificités parcellaires de chacune d’elles : densités, cépages, modes
de taille et modes de conduite…
En 2014 et 2016, Vitinnov a réalisé des campagnes de mesure afin de participer à la validation
agronomique de ce capteur dans le vignoble bordelais.
Méthodologie
En 2014, au sein d’un premier château (château A) sur 2 parcelles de Cabernet-Sauvignon voisines
mais de densités différentes, 40 placettes ont été positionnées. Sur la première parcelle (A_CS1), les
20 placettes sélectionnées comportaient 10 ceps. Sur la seconde parcelle (A_CS2), 20 placettes de 10
ceps ont également été positionnées et ont toutes été couplées à 20 placettes supplémentaires de
20 ceps. Le CIVC a réalisé le passage du Physiocap® installé sur un chenillard tel qu’il a été validé en
Champagne. Des acquisitions individuelles ont été réalisées sur chaque placette ainsi qu’une
acquisition globale sur toute la parcelle.
En 2016, les tests ont été effectués sur 2 parcelles d’un château B (1 parcelle de Cabernet-Sauvignon
B_CS et 1 parcelle de Merlot noir B_Mn). Sur chacune des 2 parcelles du château B, 30 placettes de
20 ceps ont été positionnées et sur chaque placette, il y a eu 2 acquisitions différentes avec le
Physiocap®. Pour le premier passage, le Physiocap® a été installé sur un tracteur dans une
configuration telle qu’elle est pratiquée en prestation et le second passage a été effectué avec un
Physiocap® monté sur un portique portatif mis au point par l’IFV de Bordeaux pour une utilisation sur
des dispositifs de recherche (passage en mode piéton).
En 2014 et en 2016, sur chaque placette, les rameaux ont été dénombrés puis des pesées de bois de
taille ont été réalisées. Les données acquises par le capteur ont été filtrées manuellement avec
suppression des rameaux inférieurs à 3 mm et supérieurs à 25 mm (suppression des données
aberrantes, ne pouvant pas être assimilées à la mesure d’un rameau). Les analyses ont porté sur la
relation (évaluée par régression linéaire) entre le nombre de rameaux comptés manuellement et le
nombre de rameaux détectés par le Physiocap® ainsi que sur la relation (évaluée par régression

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 13/39
linéaire) entre les pesées des bois de taille et l’indicateur de biomasse estimé par le capteur. Le
coefficient de détermination R² est un indicateur permettant de juger de la qualité d’une régression
linéaire. Sa valeur est comprise entre 0 et 1 et il mesure l’adéquation entre les données du
Physiocap® et les données de comptage manuel et de pesée. Plus la valeur du coefficient de
détermination est proche de 1, plus la relation entre les mesures est bonne.
Résultats Les résultats présentés portent uniquement sur les parcelles de Cabernet-Sauvignon (A_CS1, A_CS2,
B_CS) et les passages du Physiocap® installé sur un tracteur (B_CS) ou sur un chenillard (A_CS1 et
A_CS2).
La figure 1 présente les graphiques des régressions linéaires entre les nombres de sarments comptés
par le Physiocap® et ceux comptés manuellement pour les 2 parcelles de Cabernet-Sauvignon du
château A. En figure 2, ce sont les graphiques des régressions linéaires entre l’indice de biomasse
estimé par le Physiocap® et les pesées de bois de taille qui sont représentés pour les mêmes
parcelles.
Figure 1: Relation entre le nombre de sarments comptés par le Physiocap® (sur chenillard) et les
sarments dénombrés manuellement sur château A en 2014
Figure 2: Relation entre l’indice de biomasse estimé par le Physiocap® (sur chenillard) et les poids de bois de taille sur château A en 2014

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 14/39
Pour les 2 parcelles de Cabernet-Sauvignon du château A, la relation entre le nombre de rameaux
détectés par le Physiocap® et le dénombrement manuel est moyenne (A_CS1, R²=0.52) à bonne
(A_CS2, R²=0.71). Dans les 2 cas, le Physiocap® dénombre plus de rameaux que le comptage manuel.
Concernant l’indice de biomasse estimé par le Physiocap®, il est mal corrélé aux pesées de bois de
taille sur la parcelle A_CS1 (R²=0.14, relation non significative). Par contre, la relation est bonne pour
la parcelle A_CS2 avec une relation très significative et un R² de 0,73.
Les corrélations avec les données agronomiques sont donc très bonnes sur la parcelle A_CS2. Elles le
sont moins sur la parcelle A_CS1 sans qu’il y ait une explication simple à cela.
Ces analyses ont été réalisées pour chaque parcelle et chaque indicateur. Le tableau 1 présente les
coefficients de détermination pour toutes les parcelles et chacune des 2 relations testées.
Tableau 6 : Relation entre les mesures réalisées par le Physiocap® (nombre de sarments et indice de
biomasse) et les comptages de rameaux effectués manuellement et les pesées de bois de taille
(coefficient de détermination : R²)
Pour le dénombrement des sarments, les relations entre comptages manuels et par le Physiocap®
sont très variables entre les 4 parcelles étudiées. Les relations sont significatives pour ces 4 parcelles
mais la qualité de la relation est très variable, allant de moyenne pour la parcelle B_CS (placette de
20 ceps), A_CS1 (10 ceps), A_CS2 (20 ceps) à bonne pour la parcelle A_CS2 (placettes de 10 ceps)
avec un coefficient de détermination R² de 0,71. De plus, on observe que sur certaines parcelles le
capteur surestime le nombre de rameaux (A_CS1 et A_CS2) tandis que sur d’autres parcelles, il le
sous-estime (B_CS). Il est possible que la hauteur du capteur et sa stabilité lors du passage du
Physiocap® impacte sur le comptage des rameaux. De même, lors du comptage manuel, la hauteur à
laquelle sont comptés les rameaux doit être fixe et similaire à celle du capteur. La variabilité de la
hauteur des 2 comptages (manuel et Physiocap®) peut en partie expliquer les différences observées
entre les parcelles. La qualité du relevage ainsi que la personne ayant effectué ce travail peuvent
donc très probablement impacter sur les mesures du Physiocap®. Le Cabernet-Sauvignon étant un
cépage avec un port érigé, des comparaisons avec d’autres cépages seraient à réaliser pour vérifier
cette hypothèse. Sur la parcelle A_CS2 deux longueurs de placettes avaient été couplées (soit 10 ceps
de long soit 20 ceps de long) afin de déterminer si la relation s’améliorait en augmentant le nombre
de mesures (l’erreur ponctuelle pourrait être atténuée par le grand nombre de points pris par un
capteur). Or la relation n’est pas améliorée en augmentant la taille des placettes de mesures. Au
contraire la meilleure relation est obtenue avec les placettes les plus petites (R2 =0,71 avec des
placettes de 10 ceps de long contre R2=49 pour des placettes de 20 ceps de long).
Parcellenb de cepspar placette
Nb de sarments physiocap/
comptage manuel
Indice de biomasse physiocap /poids des bois
A_CS1 10 0.52 0.14
A_CS2 10 0.71 0.73
A_CS2 20 0.49 0.89
B_CS 20 0.37 0.57

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 15/39
Pour les relations entre indices de biomasse et poids des bois de taille, les résultats présentent une
variabilité plus importante entre les parcelles que pour le dénombrement des rameaux. Les R²
varient entre 0,14 et 0,89. La parcelle A_CS1 présente la plus faible relation entre indice de biomasse
et pesée de bois de taille alors que la A_CS2 montre de très bonnes relations entre les valeurs (R²=
0,73 pour les placettes de 10 ceps et R²=0,89 pour les placettes de 20 ceps). La relation est moyenne
sur la parcelle B_CS (R²=0,57). Par contre, pour l’indice de biomasse, l’augmentation du nombre de
ceps sur les placettes permet d’améliorer la relation. Pour calculer l’indice de biomasse, le capteur
mesure une section de rameau qui est ensuite assimilée au diamètre de celui-ci. Par conséquent, la
hauteur de passage du capteur va également influer fortement sur les sections de rameaux mesurées
donc sur l’indice de biomasse estimé par le Physiocap®. Les différences de stabilité lors des passages
pourraient expliquer la grande variabilité entre les parcelles. Enfin, le port des rameaux peut
également impacter l’estimation de l’indice de biomasse. En effet, sur les parcelles présentant des
rameaux avec un port plus érigé, on peut supposer que la section des sarments mesurée par le laser
sera plus proche du diamètre réel du sarment et que sur ces parcelles l’indice de biomasse sera
mieux estimé par le Physiocap®.
Le petit nombre de parcelles suivies lors des deux campagnes d’acquisition dans le Bordelais
constitue des résultats préliminaires qui bien qu’insuffisants invitent à la poursuite de ces travaux.
Conclusion Le Physiocap® apparait comme un capteur intéressant de par ses résultats en Champagne et son
accessibilité en termes d’acquisition et d’interprétation mais des travaux de validation et
d’adaptation pour la région bordelaise sont encore nécessaires. Nos résultats montrent une grande
variabilité dans les relations entre les mesures effectuées par le Physiocap® et les comptages
manuels / pesées de poids de taille. Plusieurs hypothèses ont été émises afin d’expliquer ces
différences mais des travaux supplémentaires seraient nécessaires pour mieux comprendre les
facteurs jouant sur la qualité des relations.
Des adaptations du capteur semblent encore nécessaires dans le bordelais pour s’assurer de bonnes
relations entre les données acquises par le Physiocap® et les valeurs agronomiques. Cette phase
semble indispensable avant de passer à l’étape d’établissement de règles de décisions solides pour
les adaptations de la taille, de la fertilisation et de l’enherbement.
Remerciements Vitinnov tient à remercier le CIVC pour sa collaboration et l’acquisition des mesures en 2014, l’IFV Bordeaux pour le prêt du Physiocap® portatif en 2016 ainsi que les châteaux ayant mis des parcelles à disposition et plus particulièrement le château nous ayant transmis des données prises par un Physiocap® embarqué en 2016.



Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 16/39
UTILISATION DES IMAGES AERIENNES POUR DETERMINER LA POROSITE FOLIAIRE DE LA VIGNE
D. Noll1 et S. Burgos2
1Changins haute école de viticulture et d’œnologie 1260 Nyon Suisse
2HAFL haute école des sciences agronomiques, forestières et alimentaires 3052 Zollikofen Suisse
Contact : Dorothea Noll. Email : [email protected]
Introduction
Le développement ces dernières années de la viticulture de précision permet l’avènement d’un outil
de gestion intéressant pour les viticulteurs. L’identification des variations spatiales de rendement
d’une parcelle permet au vigneron d’ajuster son système d’exploitation dans le but d’améliorer la
qualité de ses vendanges. La hauteur de la canopée et sa densité (vigueur) sont des indicateurs
mesurables par ce type d’outil.
Les objectifs de cette étude sont :
Identifier des indicateurs présents sur les images aériennes pouvant servir à des mesures
agronomiques de base
Evaluer la précision des mesures prises par des drones
Méthodologie
L’étude a été réalisée sur deux parcelles différentes de la station de recherche Agroscope à Leytron
(Valais). La première parcelle sert d’étude pour l’effet de différentes couvertures du sol et la seconde
comprenant plusieurs cépages est utilisée dans le cadre d’une étude sur le stress hydrique et
l’irrigation.
Pour pouvoir identifier la hauteur de la vigne et celle du couvert végétal, il faut d’abord créer un
modèle numérique de terrain1 sur la base du modèle numérique de surface2 obtenu suite au vol d’un
drone. Puis grâce à ces deux modèles, on obtient un modèle différentiel d’élévation. Il représente la
parcelle viticole sans donnée d’altitude/élévation (sans pente). Il s’agit dès lors d’une surface plane
où les reliefs représentent la végétation de la parcelle.
Deux méthodes sont utilisées pour quantifier la porosité de la canopée de la vigne. La première
méthode quantifie la surface d’ombre de chaque rang de vigne. La seconde méthode compare les
valeurs (hauteur de la végétation) indiquées par le modèle différentiel d’élévation.
Pour quantifier l’ombre produite par chaque rang de vigne, l’image proche infrarouge est utilisée. Ce
type d’image rend l’ombre beaucoup plus contrastée que sur une image en bandes spectrales
visibles. En utilisant les valeurs de l’ombre déterminée sur la bande spectrale proche infrarouge, il est
possible d’extraire les pixels d’ombre d’une image (Figure 1). Cette méthode est efficace lorsque
l’ombre est clairement définie et qu’il existe une différence de porosité dans le feuillage.
1 Le MNT décrit la surface terrestre en trois dimensions sans végétation ni constructions.
2 Le MNS reproduit la forme de la surface terrestre en incluant tous les éléments permanents et visibles du
paysage tels que le sol, la végétation, les forêts, les bâtiments et les autres ouvrages d’art.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 17/39
Figure 1 : Orthomosaïque de base en proche infrarouge puis extraction des pixels d’ombre en blanc
et sans ombre en noir.
La seconde méthode s’appuie sur le modèle différentiel d’élévation, les rangs de vignes sont séparés
en strates en fonction de la végétation. Les éléments mesurant moins de 25 cm sont écartés. Ce seuil
de 25 cm est fixé par rapport à la hauteur du fil de la branche à fruit ; en dessous, nous partons du
principe qu’il ne s’agit pas de la vigne. Il ne reste donc que les éléments de plus de 25cm.
Puis on associe ces résultats aux rangs de vigne préalablement dessinés (vert). Les pixels ayant une
élévation relative de plus de 25 cm s’affichent en blanc alors que ceux qui ne répondent pas à ce
critère sont en noir (Figure 2).
Figure 2 : Association des rangs de vigne (en vert) et des pixels ayant une élévation relative
supérieure à 25 cm en blanc.
Ces données sont ensuite reliées d’une part à la quantité d’ombre de la zone et au poids des bois de
taille de la zone pour évaluer la pertinence de cette méthode comme une mesure indirecte de la
vigueur.
Sur la même base que la méthode précédemment expliquée, il est aussi possible d’estimer la hauteur
du couvert végétal. Plutôt que de considérer les pixels de plus de 25 cm de haut, il s’agit de
considérer uniquement les pixels de moins de 25 cm.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 18/39
Résultats et analyses
Extraction de l’ombre
La comparaison des différents couverts montre une bonne corrélation entre l’ombre extraite sous la forme d’un nombre de pixels et les poids des bois de taille (Figure 3).
Figure 3 : Relation entre l’ombre et le poids des bois de taille
Modèle d’élévation relative
La comparaison sur la parcelle d’étude de stress hydrique des différents modes de conduite (irrigué,
non irrigué ou couvert par une bâche plastique) montre que le modèle différentiel d’élévation est
fortement corrélé négativement avec le potentiel hydrique foliaire lors de la véraison (Figure 4).
Figure 4 : Relation entre le modèle différentiel d’élévation et le potentiel hydrique foliaire durant la
véraison

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 19/39
Limite de la méthode et perspectives
La quantification de l’ombre est un bon indicateur de la quantité de soleil interceptée par les feuilles.
Ce qui est assez logique, plus il y a de feuilles, plus la haie foliaire est dense et plus il y a d’ombre.
Cette méthode fonctionne car la vigne ne présentait pas une canopée fermée. La porosité du
feuillage reflète donc la vigueur de la vigne. Comme les rangs ne changent pas, il est possible de
refaire rapidement cette analyse chaque année ce qui accélère considérablement la vitesse des
analyses. Il est aussi nécessaire que les images soient prises lorsque le soleil n’est pas trop haut car
dans le cas contraire il ne serait pas possible d’observer d’ombre sur les images aériennes.
Le modèle différentiel d’élévation permet des analyses de différentes couches de végétation (vigne
et couvert du sol). Sa précision doit encore être améliorée, cependant cette méthode peut être un
outil de gestion du vignoble permettant par un suivi de comparer la biomasse de la vigne dans le
temps.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 20/39
UTILISATION DES IMAGES AERIENNES A TRES HAUTE RESOLUTION POUR DOCUMENTER DES CAS D’EROSION SUITE A DES EVENEMENTS PLUVIEUX
INTENSES OU RECURRENTS
D. Noll1
1Changins haute école de viticulture et d’œnologie 1260 Nyon Suisse
Contact : Dorothea Noll. Email : [email protected]
Introduction
L’érosion des sols diminue à la longue leur fertilité par la perte de particules de terre en surface. Elle
peut aussi contaminer les eaux avec des sédiments fins, des éléments nutritifs, des pesticides ou
encore des polluants comme le cuivre. Malgré tout cela, les problèmes liés à l’érosion ne sont
généralement pas considérés comme prioritaires et les mesures prises pour les limiter sont
généralement insuffisantes. De plus, il est difficile d’observer sur le terrain toutes les situations qui
engendrent effectivement de l’érosion et de proposer des mesures adéquates. Les nouvelles
technologies telles que l’utilisation d’images aériennes prises par des drones, couplées à l’utilisation
des données radar des précipitations offrent de nouvelles possibilités pour pouvoir documenter ces
situations et proposer des mesures préventives. Les objectifs de ce projet de recherche sont de :
Développer une méthode d’analyse des précipitations permettant de localiser les zones de pluies
intenses.
Documenter des évènements érosifs linéaires par des mesures de terrain et des images
aériennes prises avec un drone.
Automatiser une méthode de reconnaissance des rigoles d’érosion à l’échelle d’un agrosystème.
Automatiser une méthode de calcul du volume d’érosion suite à un travail de comparaison avec
des mesures de terrain.
Documenter l’occupation du sol, les pratiques culturales et l’environnement parcellaire qui a subi
de l’érosion.
Méthodologie
Le périmètre d’étude a été choisi de manière à être représentatif d’une grande variabilité de sols, de
pratiques culturales et de structures d’exploitation. Il comprend des zones de grandes cultures et des
vignes.
Les événements pluvieux intenses et leur localisation sont annoncés par un système d’alarme mis en
place dans le cadre de ce projet via un e-mail. Des mesures de l’érosion sont réalisées en mesurant
sur la longueur de la rigole, des sections transversales à intervalles réguliers. Sur ces sections
transversales, la largeur de la rigole et sa profondeur en trois points sont mesurées.
La zone d’érosion est photographiée par un drone. Les images obtenues avec le drone doivent être
traitées dans le but de calculer le volume érodé dans la zone prospectée. La méthodologie d’analyse
est composée de trois étapes. 1) reconstruction d’un modèle numérique pré-érosion3 sur la base du
3 L’équivalent d’un modèle numérique de terrain qui décrit la surface terrestre en trois dimensions sans
végétation ni constructions

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 21/39
modèle numérique de surface4 obtenu suite au vol d’un drone. Ceci dans le but de reconstituer un
niveau surélevé du terrain qui suit toutefois le relief de la surface, 2) création d’un modèle
différentiel de profondeur et 3) détection des rigoles d’érosion. Les résultats obtenus à la fin sont des
mesures de profondeur d’érosion et de volume de terre érodée dans les zones affectées.
Validation de la méthodologie
La validation est effectuée selon deux aspects. D’une part la comparaison entre les mesures de
terrain et le modèle différentiel de profondeur reconstruit (validation visuelle), et d’autre part la
dépendance des zones classées avec ou sans rigoles entre le modèle différentiel de profondeur et la
délimitation manuelle (validation de l’extraction).
Résultats et analyses
Les images de ce site d’étude situé en vigne (Figure ) ont été prises en janvier 2015, durant la période
de repos de la vigne.
Les zones 1 et 2 représentent des zones où de l’érosion avait été observée au préalable sur le terrain.
Figure 1 : ortho-photo du premier site d’étude avec deux zones d’érosion
Reconstruction d’un modèle de pré-érosion en vigne
La figure 2 montre les profils transversaux de trois modèles de pré-érosion basés sur un transect au niveau de la zone d’érosion 1. Ils ont été réalisés en appliquant trois filtres spatiaux différents.
Figure 2 : Profil transversal obtenu avec trois filtres spatiaux différents
4 Le MNS reproduit la forme de la surface terrestre en incluant tous les éléments permanents et visibles du
paysage tels que le sol, la végétation, les forêts, les bâtiments et les autres ouvrages d’art.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 22/39
En fonction du filtre spatial appliqué, les rigoles d’érosion sont plus ou moins visibles (Figure 3). Le
filtre maximum considère bien les rigoles, cependant il surestime un peu les zones sans rigoles
(partie grise sur le schéma). Le filtre médian met bien en évidence les rigoles plus profondes mais le
reste de la surface est un peu plus floue.
Figure 3 : De gauche à droite, modèles différentiels de profondeur reconstruits suite à l’application
de filtres spatiaux, filtre maximum (à gauche) et filtre médian (à droite).
Détection des rigoles d’érosion en vigne
Sur la base du modèle différentiel de profondeur, on détecte les rigoles potentielles (Figure Figure 4
à gauche) qui répondent aux deux conditions suivantes : a) une différence supérieur à 3 cm par
rapport au modèle de pré-érosion et b) si la dérivée est différente de zéro. Puis les pixels connectés
entre eux forment les rigoles d’érosion de manière automatique (Figure 4 à droite). Cela permet de
marquer les objets et ensuite de les isoler et enfin calculer leur volume.
Figure 4 : à gauche, détection des rigoles potentielles (noir) ; à droite, détection des rigoles par les
pixels connectés
Limite de la méthode et perspectives
La limite de la méthode serait conditionnée par la profondeur des rigoles à mesurer, car la précision
des altitudes calculées ne peut pas être meilleure que la résolution des images issues du drone (1-
4cm/pixel). D’autre part, la considération du modèle pré-érosion qui sert de base pour la validation
du modèle différentiel de profondeurs reste contestable. De plus, la question peut se poser s’il est
pertinent de considérer les mesures d’érosion prises sur le terrain comme des données justes et
comparables pour valider la méthode élaborée sur la base de l’analyse des images aériennes. Si cela
est le cas, une erreur autour du 10 % est commise lors du calcul du volume d’érosion. Ceci est déjà
une bonne précision si on compare à l’erreur qu’on peut faire sur les mesures à la main. En outre, ces
mesures directes sont lourdes à mettre en œuvre et demandent beaucoup de temps. L’optimisation
à terme de cette méthode permettra de déterminer un volume de terre érodée à l’échelle d’une

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 23/39
parcelle ou d’une section d’un bassin versant.
Bien que les problèmes d’érosion puissent être considérés comme de moindre importance pour la
production viticole, le suivi de l’érosion à plus ou moins long terme d’un vignoble permet d’identifier
les pratiques culturales responsables de l’érosion dans une région donnée et celles qui la limitent, et
de prendre, en connaissance de causes, les mesures nécessaires pour limiter la perte de sol,
ressource quasi-non renouvelable (il faut 1 siècle pour former 1 cm de sol). Enfin, la législation suisse
prévoit une réduction des contributions liées aux prestations écologiques si les terres assolées
présentent d'importantes pertes de sol dues à l'exploitation. Ceci renforce l’importance accordée à la
protection des sols contre l’érosion.



Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 24/39
ETUDE DES VARIATIONS DE SENSIBILITE D'UN VIGNOBLE CONTRE LES PRINCIPALES MALADIES CRYPTOGAMIQUES DE LA VIGNE : ZONAGE D’UNITES DE
FONCTIONNEMENT PHYSIOLOGIQUE A PRIORI HOMOGENES
M. Raynal1, C. Debord1, M. Vergnes1, B. Delfour1, A. BennabiI1, M. Georges2, R. FulchicC2, J. Servant2
1Institut Français de la Vigne et du Vin, 39 rue Michel Montaigne 33290 Blanquefort France 2Château Léoville Las Cases, 33250 Saint Julien Beychevelle France
Contact : Marc Raynal, Email : [email protected]
Le « Plan de Traitement Optimisé » (PTO®), projet développé au sein de l’IFV, vise à définir une
méthodologie de zonage à priori de l’iso sensibilité aux principales maladies à partir d’une approche
systémique globale à l’échelle de l’exploitation viticole. A terme, l’objectif est d’élaborer une
cartographie des quantités de matières actives nécessaires et suffisantes pour enrayer les
développements épidémiques pour des pulvérisateurs intelligents capables de moduler les doses
appliquées à l’échelle intra parcellaire. Le transfert de ces technologies vers la profession suppose
une automatisation de l’intégration des différentes couches des variabilités constatées et repose
donc sur l’exploitation des principes de la viticulture de précision.
Ces techniques permettent des mesures physiques géolocalisées nombreuses précises et
exhaustives. L’exploitation de ces données ouvre l’accès à une analyse systémique du
fonctionnement d’un vignoble à l’échelle d’une exploitation viticole. Le but de notre étude vise à
tirer profit de ce type de mesures et valoriser les informations qu’elles délivrent en croisant, à l’aide
d’un système d’information géographique (SIG), les différentes couches représentant des variables
indépendantes et caractéristiques du système de production. L’objectif est ainsi d’établir un zonage
susceptible d’expliquer les variations du développement physiologique de la vigne et, le cas échéant,
d’éventuelles différences de sensibilité des plantes aux maladies. L’étude porte sur la combinaison de
deux cartes du vignoble Léoville Las Cases, établies pour représenter respectivement le
fonctionnement des compartiments sol et plante, par des mesures de résistivité électrique (R) et
d’indice de biomasse (B). Trois niveaux – faible, moyen, fort - sont définis pour chacune de ces deux
variables. La combinaison de ces indicateurs permet ainsi de définir 9 classes caractérisant des ilots,
baptisés Unités de Fonctionnement Physiologique (UFP), dont la distribution est délimitée par le SIG
sur l’ensemble du domaine viticole. Six UFP sont retenues pour bâtir notre observatoire après
exclusion du niveau de biomasse moyen dans l’objectif de décrire des différences de comportement
au plan du développement physiologique des ceps, et de leur sensibilité aux maladies. A cet effet,
des observations régulières sont réalisées durant les campagnes 2014 et 2015 sur des zones traitées
et non traitées de chaque UFP. Les résultats issus de ces deux premières années d’étude montrent
que la clé de lecture proposée par le concept d’UFP permet de décrire des variations significatives
constatées sur certains des critères physiologiques et sanitaires observés.
Dispositif étudié
L’étude est conduite sur le parcellaire du château Léoville Las Cases (LLC) situé sur la commune de
Saint Julien-Beychevelle, sur une superficie de 98 hectares. Le parcellaire est constitué à 66% de
Cabernet-Sauvignon, 23% de Merlot, 10% de Cabernet franc conduits en Guyot double sur des porte-
greffes de type RGM, 3309C, 101-14Mgt, et 420A. L’âge moyen de plantation est de 41 ans, variant
de 3 à 83 ans. Les données descriptives du parcellaire sont géoréférencées et stockées dans une base

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 25/39
de données couplée à un Système d’Information Géographique (SIG).
Une cartographie du vignoble est établie en 2013 à l’aide des informations relevées par le château
LLC sur le domaine :
- résistivité électrique du sol, réalisée par la société Géocarta en 2006 à l’aide d’un dispositif
multi électrodes
- Indice de biomasse réalisé par télédétection à l’aide d’un drone équipé d’un capteur Proche
Infra Rouge (PIR) (800 nm) par la société l’Avion Jaune en août 2013, puis 2014
Trois classes - faibles, moyennes, fortes - ont été constituées pour chacune de ces deux variables
selon la méthode des seuils naturels de Jenks. La maille élémentaire représente une surface de 10m²,
dont la combinaison détermine 9 classes à priori différentes sur la base des critères analysés.
Figure 1 : représentation sur le vignoble du domaine LLC, des 3 classes de résistivité électrique du sol
(gauche) et du NDVI (droite).
La délimitation des Unités de Fonctionnement Physiologique (UFP) résulte du croisement des cartes
d’entrée : le zonage est constitué à partir des couches de résistivité électrique (figure 1g) et d’indice
de biomasse (figure 1d), en retenant respectivement pour chacune d’elles trois et deux niveaux. La
classe d’indice de biomasse moyenne est écartée au profit des deux extrêmes, de manière à
simplifier la mise en œuvre du dispositif d’observation tout en accentuant la variabilité potentielle
des écarts de comportement observés. Le croisement des couches d’informations offre ainsi 6
classes différentes représentant autant d’UFP réparties sur le vignoble (figure 2).
Figure 2 : localisation des zones UFP homogènes et des placettes d’observation sur les UFP retenues.
Deux répétitions des zones d’observation ont été mises en place sur chacune des UFP retenues sur
notre dispositif : l’une sur « l’enclos » correspondant à la partie Est du vignoble, l’autre sur le
« plateau » en zone Ouest du parcellaire. Chaque zone d’observation comporte un Témoin Non
Traité (TNT) de cinq ceps ; de part et d’autre du TNT, cinq ceps situés à proximité immédiate servent
de support aux observations physiologiques pour caractériser le développement du végétal sans
interaction avec le développement des maladies. Au total, 24 points d’observations sont répartis sur
les 6 classes d’UFP retenues pour les cépages Merlot et Cabernet Sauvignon, comme illustré dans la
figure 2.
Différentes mesures sont réalisées sur ces placettes d’observation : à partir du stade pré-
débourrement, des comptages réguliers portent sur les nombres de bourgeons (laissés à la taille,

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 26/39
débourrés…), de rameaux fructifères et de grappes. La zone TNT est constituée de cinq ceps
consécutifs protégés par une bâche lors des traitements. Les trois ceps centraux servent de support
aux observations de l’état sanitaire vis-à-vis du mildiou, de l’oïdium, du black rot : une évaluation de
la fréquence et de l’intensité d’attaque sur feuilles et grappes est réalisée chaque semaine jusqu’au
stade de la véraison.
Résultats
Variabilité du développement de la vigne
Le suivi du développement physiologique de la vigne sur les millésimes 2014 et 2015 montre des
caractéristiques propres à chaque UFP sur certains des indicateurs calculés : la production de grappes
est plus importante sur les zones de biomasse élevée, et le facteur sol révèle des taux de fertilité
supérieurs pour les sols S1 de faible résistivité électrique. A l’inverse, le dispositif élaboré ne révèle
pas de variations significatives des indicateurs du taux de débourrement ou du potentiel de
production.
Variabilité de l’état sanitaire
Le millésime 2014 est marqué par une forte attaque du mildiou dans le courant du mois de juillet ;
les niveaux d’attaque atteignent en moyenne près de 30% d’intensité de destruction de feuillage et
25% de fréquence de grappes atteintes en fin de saison. Les niveaux d’attaque par l’oïdium sont
globalement plus faibles sur le feuillage (30% de feuilles atteintes et 7% de destruction du feuillage)
mais restent conséquents sur grappes (75% de grappes atteintes pour un niveau de destruction
moyen de 10% à la véraison). Le Black rot montre un niveau d’attaque faible sur feuilles (moins de
1% de feuilles atteintes) comme sur grappes (2% de grappes atteintes et 0.7% de destruction de la
récolte au stade véraison).
Figure 3: localisation, au stade pré-véraison, des foyers de mildiou (gauche), d’oïdium (centre) et de
Black rot (droite), en 2014 (haut) et 2015 (bas).
En 2015, au stade de la véraison, les niveaux d’attaque de mildiou atteignent en moyenne 33% du
feuillage pour 6,5% de destruction du feuillage, et 29% de grappes atteintes pour 9,5% d’intensité de
la récolte. Les niveaux moyens d’attaque d’oïdium sont quant à eux de 14% en fréquence sur feuilles
(5,5% de destruction) et de 13.5% de grappes atteintes (3,6% de destruction). L’attaque de black rot
Mildiou Oïdium Black rot

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 27/39
est faible sur le millésime 2015, inférieure à 0,5% de feuilles et grappes atteintes. L’analyse de la
répartition spatiale des attaques montre des foyers bien distincts pour chacune des trois maladies,
comme le montrent les cartes de la figure 3 établies fin juillet début aout, peu avant le stade de la
véraison. Le dispositif des témoins non traités, bien que remanié entre 2014 et 2015, montre une
distribution différente de la répartition spatiale des attaques d’une année sur l’autre : pour les 3
maladies observées, les foyers ne sont pas localisés sur les mêmes zones du vignoble. De même, la
dynamique propre de chaque maladie diffère sur les deux millésimes (données non présentées) :
l’année 2014 est caractérisée par des attaques plus tardives et plus virulentes que celles de la
campagne 2015.
Les résultats des observations sanitaires ont été soumis à une analyse de variance et comparaison
des moyennes à l’aide du test de Tuckey au seuil de risque de 5% sur l’ensemble des dates de
contrôles (données non présentées). Ces analyses de variance permettent de déterminer l’impact du
zonage UFP (variance globale) sur l’explication de la distribution des maladies, tout en mesurant
l’effet du sol, de la biomasse et leur interaction. Nous dressons ci-après les principaux enseignements
relevés pour le mildiou et l’oïdium, au terme des deux premières années d’étude : les niveaux
d’attaque de Black rot sont trop faibles pour permettre d’évaluer l’impact du zonage UFP sur la
distribution spatio-temporelle des foyers.
Mildiou
La comparaison des seuils de signification révèle des modes de fonctionnement différents au cours
des millésimes 2014 et 2015. Au niveau de l’explication de la variance globale, le zonage UFP montre
en 2014 un pouvoir discriminant fort sur le feuillage dès le mois de juin et tout au long de la saison ;
l’effet sur grappes n’est que plus tardif et moins marqué. En 2015, l’effet zonage UFP apparait quasi
simultanément sur feuilles et grappes, et, à l’inverse de 2014, apparait plus marqué sur grappes que
sur feuilles.
L’effet du sol, marqué sur le feuillage en 2014, disparait complètement en 2015. Les deux années il
semble n’avoir aucun impact sur la variabilité d’attaque de la récolte.
L’effet de la biomasse explique dans les deux cas la variabilité de l’attaque du feuillage par le mildiou.
Il semble inconstant au cours de chaque saison, au seuil de risque de 5% retenu, ce qui traduit sans
doute des dynamiques de développement du mildiou différentes. L’effet de la biomasse sur le niveau
d’attaque des grappes apparait plus tôt et plus fort en 2015 qu’en 2014.
L’interaction des deux facteurs sol et biomasse montre en 2014 un effet significatif uniquement sur
l’attaque du feuillage. Il est moins net en 2015 sur le feuillage et apparait sur grappes à la fin du mois
de juillet, soit passé le stade véraison.
Oïdium
Sur les deux années de mesure, le zonage UFP explique la variabilité des attaques sur le feuillage et
sur la récolte. L’effet sur le feuillage est plus précoce en 2014 (début juillet) qu’en 2015 (mi-juillet)
mais se révèle moins marqué. L’effet inverse est observé sur grappes : le zonage UFP apparait
légèrement plus précoce en 2015 qu’en 2014, au point qu’il se manifeste en 2015 avant l’effet sur le
feuillage. Il apparait surtout plus marqué en 2015 puisqu’il va jusqu’à expliquer la variabilité de
l’intensité de destruction de la récolte, là où en 2014 il ne décèle de variations que sur la fréquence
de grappes atteintes.
L’effet du facteur sol apparait relativement proche entre les deux millésimes : il apparait nettement
corrélé à la fréquence d’attaque sur grappes dès début juillet, soit au stade fermeture de la grappe,
et dé corrélé des attaques sur le feuillage sauf en fin de saison à partir de fin juillet.
L’effet de la biomasse est faible et inconstant sur le feuillage en 2014 ; il n’apparait pas sur grappes.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 28/39
A l’inverse, il est manifeste sur la fréquence d’attaque des feuilles et des grappes en 2015.
L’interaction des deux facteurs sol et Biomasse montre les deux années un effet sur la variabilité
d’attaque du feuillage d’autant plus marqué à l’approche de la véraison.
Conclusion
Le système d’Unité de Fonctionnement Physiologique (UFP) délimite à priori un zonage homogène à
partir d’indicateurs préétablis : le croisement des cartes de résistivité électrique du sol et d’indice
aérien de détection de la biomasse relevé par drone permet une approche systémique du
fonctionnement de la vigne et de sa sensibilité aux maladies sur la globalité d’une exploitation.
Malgré les difficultés inhérentes à la mise en œuvre d’une telle étude à l’échelle globale d’une
exploitation viticole de 100 ha, les premiers résultats obtenus en 2014, confirmés par ceux de 2015,
sont très encourageants et montrent l’intérêt d’un tel dispositif d’étude : le système de zonage
proposé révèle des différences de comportements, tant sur le développement et la production de la
vigne que sur le niveau d’expression des principales maladies observées. Le concept d’UFP apparaît
ainsi comme une clef de lecture pertinente de l’analyse de la variabilité de la production et des
principales attaques cryptogamiques sur le vignoble, gage d’une meilleure compréhension du
fonctionnement de nos systèmes de production viticoles.
L’étude confirme ainsi d’ores et déjà tout l’intérêt que revêt la capitalisation d’informations
exhaustives issues de capteurs embarqués exploités dans le cadre des techniques émergentes de la
viticulture de précision. Ces premiers résultats devront bien sûr être confirmés par la poursuite de
l’étude sur plusieurs millésimes de manière à vérifier la stabilité temporelle des critères étudiés, pour
mieux comprendre dans quelle mesure ils entrent ou non en ligne de compte et hiérarchiser leur
impact en fonction de l’itinéraire climatique.
Références bibliographiques CLAVERIE M., DAVY A., AND RAYNAL M. 2014. A 3 year evaluation of Optidose® method for pesticide dose adjustment in Mediterraneen French Vineyards to control powdery (and downy) mildew. Proceedings of the seventh international workshop on the grapevine downy and powdery mildew, Vitoria Gasteiz, Spain, june 30th july 4th 2014, Arabaco Foru Aldundia, 47-50
DAVY A, RAYNAL M, VERGNES M, CLAVERIE M, CODIS S, BERNARD FM. 2011. Trials results of the Optidose® method using an adjustment of the pesticide dose for control of downy mildew and powdery mildew, proceedings of the 11th international workshop on sustainable plant protection techniques in fruit growing, Lanxade, France, 8-10 June 2011, CTIFL, 80-81.
RAYNAL M., GUITTARD S., DEBORD C, DAVY A., PLANCQ T., VERGNES M., CODIS S., HEBRARD O. 2012. Le Plan de Traitement Optimisé : une approche globale pour réduire les impacts environnementaux, actes du colloque CIETAP, conférences sur les techniques d’application de produits de protection des plantes, AFPP, Lyon 15-16 mars 2012.
TISSEYRE B. 2012. Peut-on appliquer le concept d’agriculture de précision à la viticulture? Mémoire d’habilitation à diriger des recherches CNCA n°3, 71.
Remerciements Nous tenons à remercier l’ensemble des personnels du château Léoville Las Cases qui contribue au bon
déroulement de cette étude. Ce programme est par ailleurs réalisé grâce à l’appui financier du fond européen
de développement rural (FEDER) dans le cadre du programme Innovine, et celui de France Agrimer contribuant
aux programmes Millévigne et Pulvérisation de précision.


Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 29/39
DETECTION PRECOCE DES MALADIES FONGIQUES PAR IMAGERIE
HYPERSPECTRALE : TAVELURE DU POMMIER ET ANTHRACNOSES DU NOYER.
PROJET CASDAR « AVENTURIA »
P. Vaysse1, M. Nouri1, M. Giraud1, F. Lheureux1, A. Moronvalle1, JM. Roger2, N. Gorretta2, C. Germain3,
B. Keresztes3, G. Grenier3
1 CTIFL, Centre technique interprofessionnel des fruits et légumes, 41 Route des Nébouts, 24130 Prigonrieux 2 IRSTEA, Institut national de la recherche en sciences et technologies pour l’environnement et l’agriculture, 50 Avenue de Verdun, 33612 Cestas 3
IMS, laboratoire de l'Intégration du Matériau au Système, 351 Cours de la Libération, 33400 Talence
Contact : Pierre Vaysse, Email : [email protected]
La tavelure du pommier (Venturia inaequalis) et les anthracnoses du noyer (liées à Gnomonia
leptostyla et Colletotrichum acutatum) sont les maladies fongiques majeures pour ces deux espèces.
Les stratégies de lutte pour la tavelure et les anthracnoses sont basées sur la prophylaxie, des
interventions chimiques préventives avec parfois utilisation de modèles climatiques.
Pour la tavelure, les stratégies sont soit préventives avec un nombre élevé de traitements, pour
couvrir tous les évènements contaminants et doivent être renouvelées en cas de lessivage ou de
pousses croissantes, soit curatives pour rattraper un défaut de protection.
Sur anthracnoses, les traitements en début de cycle des champignons, c'est-à-dire juste avant les
contaminations principales sont les plus efficaces.
Mieux comprendre les mécanismes d’infection est essentiel pour développer, à terme, des méthodes
de lutte ciblées contre ces agents pathogènes. Sur ces deux espèces, la connaissance précoce de la
réalité de l’infection et des mécanismes de développement permettrait de mieux positionner les
traitements « en stop », permettant ainsi de réduire les périodes de couverture, et de fait, le nombre
de traitements.
Lauréat dans le cadre de l’appel à projet CASDAR Recherche Technologique 2014, le projet de
recherche porté par le Ctifl et soutenu financièrement par le Ministère de l’agriculture, de
l’agroalimentaire et de la forêt vise à détecter de façon précoce la tavelure du pommier et
anthracnoses du noyer en utilisant des caméras hyperspectrales dans des longueurs d’ondes du
visible au proche infrarouge. Pour ce faire, le Ctifl sera appuyé scientifiquement par IRSTEA qui
possède ce type de caméras et a un savoir-faire reconnu dans le traitement des signaux
hyperspectraux, et le laboratoire IMS de Bordeaux spécialisé dans la création d’algorithmes d’analyse
d’images.
Contexte et enjeux
Parmi les problématiques sanitaires rencontrées, la tavelure du pommier et les anthracnoses du
noyer sont des maladies qui ont un impact majeur sur la rentabilité de l’exploitation. La protection
contre la tavelure constitue le plus gros poste phytosanitaire du producteur de pomme à la fois en
termes de coût mais aussi dans son pilotage.
La réduction des traitements phytosanitaires prévue notamment dans le plan Ecophyto 2018 alliée à
la demande sociétale, le développement de la résistance aux fongicides et la perte d’efficacité de
certains d’entre eux, rendent plus cruciale l’amélioration des méthodes de lutte.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 30/39
L’objectif général du projet vise ainsi à proposer un outil de détermination précoce au plus près de
l’infection (moins de 3 jours) sur les feuilles des maladies fongiques (tavelure du pommier et
anthracnoses du noyer) en utilisant une caméra hyperspectrale. Cet outil permettra d’apporter des
informations pertinentes pour la prise de décision concernant la lutte contre les maladies fongiques
au verger, et de limiter les intrants phytosanitaires. Ainsi, ce projet permettra de contribuer à
maintenir la compétitivité des entreprises agricoles du secteur fruit face à la compétition
internationale, fournir à la filière les outils de leur maintien et de leur développement.
Des maladies à fort impact économique et environnemental
En effet, la lutte contre la tavelure du pommier représente des coûts importants tant au niveau de
l'utilisation des fongicides que du temps alloué à la gestion de la maladie. Le cycle de développement
de la tavelure ne rend les symptômes visibles que 3 semaines après la contamination, les méthodes
de lutte sont basées sur des modèles climatiques « aveugles » par rapport au développement du
champignon.
La filière pomme se trouvant face à la nécessité de diminuer les coûts de production tout en
maintenant la qualité des pommes, il est nécessaire d’optimiser les moyens de lutte contre la
tavelure par la mise au point de nouveaux outils qui devraient permettre de mieux visualiser
l’apparition et la cinétique de développement de la maladie.
La tavelure est la principale maladie du pommier, justifiant la majorité des interventions fongicides.
Une mauvaise protection entraîne habituellement des pertes commerciales irréversibles pour le
producteur. La stratégie classique de protection contre la tavelure consiste à positionner des
fongicides préventifs avant les pluies annoncées durant la période des projections d’ascospores. Pour
rattraper un défaut de protection ou un lessivage du produit lors de l’épisode contaminant, des
traitements fongicides curatifs sont utilisés.
Des modèles ont été mis en place pour évaluer le risque d’infection en fonction de la maturation des
ascospores, de la pluie, de la durée d’humectation, de l’hygrométrie et de la température (modèles
DGAL/Inoki et RIMpro) pour raisonner les traitements.
Malgré une vigilance rigoureuse de la part des producteurs, des échecs de protection peuvent
apparaître certaines années. La détection précoce par analyse d’image du développement du
champignon s’avère une avancée dans l’amélioration des stratégies de protection contre cette
maladie, pour être capable de déterminer si l’évènement pluvieux a provoqué une contamination.
Les anthracnoses du noyer sont aussi des champignons responsables de pertes économiques
importantes sur noyer. Ils affaiblissent la plante et permettre l'infestation par des maladies plus
graves.
L’efficacité des traitements au cuivre diminue, et le positionnement des traitements proche de
l’infection apporterait une meilleure sécurisation de la protection.
Les anthracnoses du noyer sont liées à deux champignons Gnomonia leptostyla et Colletotrichum
acutatum qui sont présents dans toute la noyeraie française.
Les dégâts varient selon les variétés, les secteurs et les conditions climatiques.
Les feuilles présentent de petites taches polygonales, les feuilles très attaquées chutent
prématurément.
Sur fruit Gnomonia leptostyla provoque des petites taches brun noir sur le brou, dans le cas de fortes
attaques des fruits, les noix sont de petit calibre et déformées.
Colletotrichum acutatum serait le principal responsable de la maladie de la noix noire qui prend une

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 31/39
connotation d’épidémie dans le Sud-Est pouvant engendrer des pertes économiques jusqu’à 60%
(Ramain, 2012, Pollegionni et al. 2012).
L’analyse hyperspectrale, des outils d’avenir
Dans son application professionnelle, le dispositif d’acquisition devra être adapté pour être testé en
verger c'est-à-dire en conditions d’éclairage non contrôlées (lumière du jour) avec une masse
aléatoire du feuillage.
Ensuite quelques bandes spectrales spécifiques qui permettraient d’atteindre des performances de
détection suffisantes seront définies.
Ces bandes spécifiques ainsi connues devraient permettre de proposer la conception d’un système
de prise de vue multispectral dédié à la détection de la tavelure et anthracnoses, adapté à
l’exploitation finale d’un outil à vocation professionnelle.
Cette méthode est basée sur l’acquisition d’images hyperspectrales en continu à l’aide d’une caméra
spécifique depuis l’inoculation et pendant la durée du cycle des champignons. Ensuite le traitement
de ces images permettant de trouver l’empreinte de l’infection par l’agent pathogène dans les
spectres en utilisant des méthodes chimiométriques pourront être développées sur d’autres types
d’espèces notamment la pomme à cidre et d’autres maladies.
Ces travaux participeront à l’amélioration des stratégies de lutte contre la tavelure du pommier et
l’anthracnose du noyer et à la vulgarisation de ces stratégies auprès des producteurs en production
fruitière intégrée et biologique. Cet outil pourra aussi être utilisé dans la mise en place des tests de
sensibilité variétale aux maladies (phénotypage haut débit).
Ces modèles pourront aussi être testés et adaptés sur d’autres maladies fongiques ou bactériennes
des arbres fruitiers.
Figure 1 : Inoculation tavelure
Figure 2 : Colletotrichum sur feuille de noyer
Figure 3 : Camera hyperspectrale Vis NIR


Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 32/39
DAMAV : UN PROJET INTERREGIONAL DE DETECTION DE FOYERS INFECTIEUX DE FLAVESCENCE DOREE PAR IMAGERIE DE DRONE
H. Al-Saddik1, JC. Simon1, O. Brousse2, F. Cointault1 1 Agrosup Dijon, UMR 1347 Agroécologie, 26 Bd Dr Petitjean, 21000 Dijon 2 GST, 14, rue Pierre de Coubertin, 21000 Dijon
Contact : Frédéric Cointault. Email : [email protected]
Contexte et objectifs du projet
La flavescence dorée est une maladie de la vigne, décelable sur ses feuilles, contagieuse et incurable.
Afin de contenir l’épidémie, la réglementation impose aux viticulteurs de contrôler chacun des pieds
de vigne afin de détecter la maladie et d’arracher les ceps suspects. Cette surveillance, réalisée à
l’approche ou pendant la période de vendanges, mobilise de nombreuses personnes pendant une
période stratégique pour la viticulture, et constitue une opération fastidieuse. Le projet DAMAV a
alors pour but de développer une solution de détection automatisée des maladies de la vigne par
survol des parcelles par micro-drone. L’objectif est de proposer une solution clé en main pour les
viticulteurs. Cet outil permettra la recherche de foyers potentiels de Flavescence Dorée, puis plus
généralement de tout type de maladie de la vigne détectable sur le feuillage. Les partenaires du
projet ont ainsi proposé d’étudier le feuillage à l’aide d’un drone et d’une caméra multispectrale
haute résolution. Deux axes de travail sont identifiés : (i) Un travail sur les solutions de navigation à
basse altitude (suivi du terrain entre 5 et 15 m du sol) pour que le micro-drone se déplace en
intégrant son environnement immédiat grâce à la vision ; (ii) Un travail sur la conception d’une
caméra multispectrale pour identifier les symptômes recherchés grâce à une grande résolution
spatiale ainsi qu’un logiciel d’analyse s’appuyant sur des réseaux neuronaux pour la classification des
maladies. Le repérage des foyers de maladie sera fourni dans un système d’information
géographique pour apporter une lecture immédiate des zones infectées permettant un traitement
localisé et direct des ceps infectés. Labellisé par les pôles de compétitivité Pegase, Risques, Vitagora
et Aerospace Valley, le projet DAMAV, piloté par l’entreprise Novadem, réunit des partenaires
industriels (Airbus D&S, GST), scientifiques (UMR Agroécologie), des organismes techniques (BIVB,
FREDON PACA) et un domaine viticole (Domaine Magrez).
Méthodologie mise en place
La flavescence dorée se caractérise notamment par une coloration et une forme spécifique du
feuillage (Figure 1) ainsi qu’un desséchement de grappes et un défaut d'aoûtement. Transmise de
plante à plante par la greffe et par une cicadelle d'origine nord-américaine Scaphoideus titanus, elle
se propage de manière épidémique dans les vignobles du sud de l'Europe, où elle peut occasionner
de fortes pertes de récolte et compromettre la pérennité des vignobles. Aujourd’hui, plus de la
moitié de la superficie du vignoble français est en zone de lutte obligatoire, en vertu de
réglementations nationales et européennes.
Figure 1 : Ceps infestés par la flavescence dorée

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 33/39
Quatre symptômes doivent être présents simultanément et sur un même rameau pour conclure à la
présence d'une jaunisse à phytoplasmes témoignant de la maladie de la flavescence dorée :
le changement de coloration des feuilles,
l’enroulement des feuilles,
l’absence de lignification des nouvelles pousses,
la mortalité des inflorescences et des baies.
La coloration des feuilles varie en fonction du cépage : elles deviennent jaunes pour les cépages
blancs, rouges pour les cépages rouges. La difficulté est donc de détecter ces symptômes et de les
discriminer par rapport à un autre signe proche, comme une simple branche cassée qui aura une
influence sur la coloration de la feuille, ou une autre maladie. Pour qu’une suspicion soit fondée, on
considère qu’il faut détecter au minimum deux des symptômes ci-dessus. Pour l’instant il n’existe
aucune alternative viable aux traitements insecticides pour lutter contre cette maladie. Des axes de
recherche sont cependant actuellement à l’étude par le pôle technique du BIVB. Des recherches sont
menées afin de mieux comprendre le cycle de développement de Scaphoïdieus titanus, et ainsi
positionner de façon plus efficace les traitements insecticides. A cette fin, un groupe de travail
national travaille à la modélisation du cycle de l’agent vecteur. Par ailleurs, les travaux concernant
l’origine des contaminations à partir du milieu sauvage cités au préalable, mettent en évidence un
besoin de prospection et de contrôle au-delà même des zones cultivées.
A ce jour, il n’y a pas d’autre choix que de réaliser la prospection à pied dans les vignobles et qui plus
est, à proximité ou pendant les périodes de vendanges. Il est donc par conséquent, matériellement
très compliqué de déployer du personnel pour identifier les symptômes dès leur apparition. En
conséquence le diagnostic n’est pas toujours établi et repousse d’autant la date d’intervention pour
circonscrire l’épidémie, ce qui favorise d’autant la propagation de la maladie.
Le projet DAMAV s’appuiera ainsi sur les connaissances des partenaires suite notamment à l’étude
de faisabilité pour développer une solution performante et adaptée aux besoins de détection des
maladies. Cette étude de faisabilité préalable a permis de « dérisquer » le projet sur la capacité de
détection à partir d’image capturée à basse altitude. L’objectif du projet est de développer une
solution automatisée de recherche et de détection des maladies de la vigne par un moyen robotisé
aérien associé à un outil de traitement logiciel dédié (Figure 2). La solution clé en main, qui sera
proposée aux viticulteurs, pourra être déployée directement ou au travers de prestataires. Cet outil
permettra dans un premier temps la recherche de foyers potentiels de flavescence dorée, puis plus
généralement de tout type de maladie de la vigne détectable sur le feuillage (telles que l’Esca ou le
Mildiou…).
Figure 2 : Solution globale proposée à l’issue du projet DAMAV
Drone + Caméra multispectrale HR + guidage et perception du terrain
Logiciel de détection et classification des maladies + Application de d'exploitation et de représentation géographique des résultats

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 34/39
La restitution des foyers de maladies dans un système d’information géographique (SIG) sera
également fournie pour apporter une lecture immédiate des zones infectées au niveau intra-
parcellaire, permettant un traitement localisé et direct des ceps infectés. La solution est articulée
autour de moyens matériels associés à un outil logiciel complet. La finalité de DAMAV est de mettre à
la disposition de la profession un outil innovant qui leur permettra de diagnostiquer les symptômes
de la flavescence dorée de manière systématique sans mobiliser des ressources humaines
importantes.
Premiers résultats obtenus dans le cadre du projet
Les résultats présentés dans ce paragraphe concernent à la fois l’étude de faisabilité et les premières
activités de recherche du projet en lui-même.
L’étude de faisabilité menée en 2013/2014 par des partenaires du consortium (GST, UMR
Agroécologie, Novadem) à la demande du BIVB concernait la possibilité de détecter des foyers
infectieux dans les vignobles à partir d’images de drone. Cette étude a permis de valider que les
images prises par un drone à basse altitude au-dessus des vignes permettaient de visualiser des
zones flavescence dorée (figure 3b) ou d’autres maladies (figure 3a).
Figure 3 : a- Présence d’ESCA ; b- Présence de Flavescence Dorée
Cette étude a également permis de développer des algorithmes identifiant plus finement des foyers
infectieux (figure 4).
Figure 4 : a- Image originale ; b- Image traitée par les algorithmes développés
Néanmoins, un ensemble de difficultés rencontrées par la technologie actuelle ont été établis. En
effet, le caractère complexe de la topologie des parcelles (coteaux, variation de pentes, obstacles…)
rend impossible le vol automatique du drone sur la seule base du guidage par GPS, car ce moyen est
insuffisant pour suivre précisément le terrain compte-tenu des contraintes liées à l’acquisition des
données (suivi du terrain entre 5 et 10 m du sol). Par conséquent le pilotage a été réalisé en contrôle
manuel afin de suivre le terrain, ce qui a demandé un opérateur confirmé pour réaliser les vols
d’acquisition.
a b
a b

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 35/39
Ceci étant aucune réflexion n’a eu lieu sur le système d’acquisition, le capteur mis en œuvre dans
cette étude n’était qu’un simple appareil photo qui a montré ses limites dans la détection et la
différentiation des symptômes, compte tenu du seul spectre visible capturé.
Les traitements mis en place basés sur le couplage d’informations couleur/texture et neuronales,
bien que performants, doivent encore être affinés et optimisés, pour prendre en compte la notion de
fusion de données notamment grâce aux acquisitions multi-spectrales, et pour fonctionner quel que
soit le degré d’infestation des zones ciblées.
Dès lors, afin de définir au mieux le meilleur capteur d’images multispectrales, nous avons cherché à
définir les bandes spectrales de différenciation les plus adéquates. Pour cela, nous avons utilisé en
laboratoire et au champ, un spectrophotomètre permettant de couvrir le spectre 350 nm-2500 nm,
par pas de 1 nm (figure 5). L’objectif est ainsi de caractériser les zones spectrales les plus
discriminantes, puis de concevoir l’outil d’acquisition adéquat.
Figure 5 : Spectres de feuilles de vigne infestées et saines dans la gamme spectrale 600 nm-850 nm
De premières acquisitions spectrales réalisées en octobre 2015, conjointement à des analyses PCR en
laboratoire, sont en cours de traitement pour valider les bandes spectrales pertinentes, dans la limite
de l’utilisation de capteurs au silicium. Ainsi, l’année 2016 sera consacrée à une première campagne
d’essais avec les filtres spectraux nécessaires, avant la conception concrète de l’outil multispectral
final.



Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 36/39
DEVELOPPEMENT D’UN OUTIL D’ESTIMATION DU RENDEMENT
DE LA VIGNE A LA PARCELLE
B. Keresztes1, D. Granger2, Y. Labadie2, S. Mary2, S. Come3, J. Ossard3, J. Chartier4, C. Massus4, G. Brianceau5, T. Rospars5, C. Germain1
1 Laboratoire IMS – Univ. Bordeaux - Bordeaux Sciences Agro, Talence 2 Vitinnov, Univ. Bordeaux, ISVV, Gradignan 3 Vigneron de Tutiac, Marcillac 4 Aquitaine Sciences Transfert, Bordeaux
5 Inno’Vin, Villenave d’Ornon
Contact : Barna Keresztes, [email protected]
Contexte et objectif
Le rendement de la vigne est un paramètre déterminant de la qualité d'un vin, qui conditionne aussi
en partie le revenu du viticulteur. La connaissance précoce du rendement est un indicateur
agronomique d’intérêt pour le pilotage de l’exploitation, qui permet entre autres, l’optimisation des
vendanges en vert, une sélection parcellaire plus fine, la planification plus fine des cuviers,
l’adaptation de la vinification selon le rendement parcellaire voire intra-parcellaire ou encore
l’anticipation de la politique commerciale par l’estimation des volumes disponibles.
Les techniques d’estimations manuelles du rendement consistent à mesurer manuellement le
nombre de grappes par pied de vigne et le poids moyen des grappes (Murisier 1986). Pour les
résultats fiables, il convient d’échantillonner la vigne d'une façon aléatoire, sans biais provoqué par
l’opérateur. Le nombre d’échantillons dépend de la précision souhaitée et de la variance spatiale de
la mesure. Cette méthode, très coûteuse en temps, présente un taux d'erreur généralement entre
20% et 50%, mais pouvant atteindre 200% dans certains cas (Clingeleffer 2011). Le très faible nombre
de grappes observées explique les résultats décevants. De plus, si le comptage exhaustif des baies est
aisé en cas de destruction de la grappe, il est plus difficile sans destruction de celle-ci.
L’imagerie offre une alternative à ces approches manuelles. Serrano (2005) propose par exemple un
système portable composé d'une caméra, d'un fond orange et d'un capteur GPS, capable d'estimer
rapidement et précisément le volume d'une grappe mesurée. Grossetête (Grossetête 2011) améliore
cette méthode en utilisant un smartphone pour les calculs in situ et en se passant du fond orange. La
mesure se fait manuellement, grappe par grappe. La méthode de Dunn (Dunn 2004) est capable de
détecter les raisins noirs en utilisant une segmentation couleur, mais elle n’est utilisable qu’après la
véraison. Rotscher (Rotsher 2014) propose de mesurer la taille des baies sur les images acquises par
un appareil photo grand public, avec un étalonnage des mesures par une cible de référence, alors
que Nutske (Nutske 2011) propose une estimation statistique basée sur le nombre des baies
détectées et les rendements des années précédentes. Keresztes (Keresztes 2014) propose un
algorithme de détection des baies, mesure leur diamètre et leur coloration, et détermine la date de
mi-véraison et la vitesse de la maturation. D’autres projets sont en cours de développement, comme
VineRobot qui vise à développer un véhicule terrestre sans pilote doté de capteurs non-invasifs
capables de mesurer le rendement de la vigne ou sa vigueur. Les projets européens VVINNER et
VINBOT ont des objectifs comparables.
A notre connaissance, aucune méthode d’estimation du rendement de la vigne, entièrement
automatique et fondée sur des mesures spatialement denses n’a fait l’objet d’une application
extensive et encore moins d’une industrialisation. C’est l’objectif que le consortium formé par le

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 37/39
groupe « Signal et Image » du laboratoire IMS, les « Vignerons de Tutiac », la SATT « Aquitaine
Science Transfert » s’est fixé à travers le projet EARN, avec l’appui technique de la cellule Vitinnov et
le support du cluster Inno’vin (projet labellisé en 2015).
Description du système proposé
La solution proposée s’appuie sur un système d’acquisition d’images (figure 1), associé à un logiciel
permettant d’en rendre le fonctionnement complètement automatique. Le dispositif fixé sur le
tracteur est entièrement automatique (pas d’intervention du pilote). Il est associé à un dispositif de
géolocalisation et de mesure de la distance caméra / cible.
Le système conçu pour répondre à ce cahier des charges se compose principalement d’un mini-
ordinateur industriel et d’une caméra industrielle rapide (résolution de 2 Méga Pixels). L’éclairage de
la scène est assuré par un flash. Une batterie assure l’autonomie électrique et l’ensemble est protégé
par un boîtier étanche fixé à l’avant d’un véhicule (figure 2), avec une prise de vue latérale. Le
système est complété par un GPS et un télémètre ultrason.
Figure 1 : Les composants du système Figure 2 : Le système monté sur un quad
Le traitement et l’analyse des images peuvent être directement effectués (en temps différé) sur
l’ordinateur embarqué ou déporté sur un ordinateur de bureau.
Analyse automatique des images
Les algorithmes de détection des baies ont été adaptés et complétés sur la base de ceux décrits par
Grossetête (2011) et Keresztes (2014) et permettent d’obtenir le nombre, la position et la taille de
chaque baie détectée, et de construire des groupes de baies (baies suffisamment proches pour
appartenir à une grappe ou à plusieurs grappes en contact).
Au-delà de la détection automatique des baies, la difficulté de l’estimation du rendement réside dans
la transformation du nombre de baies visibles et détectées par l’analyse de chaque image en un
rendement en tonne de raisin par parcelle. Pour obtenir ce rendement, la formule suivante est
utilisée : R=Nb×α×Pu×L, où Nb représente les baies comptées par analyse d’image par mètre linéaire
de rang de vigne, α est un facteur de correction, Pu le poids moyen d’une baie, L la longueur cumulée
des rangs de la parcelle. Le facteur de correction α est obtenu en utilisant les résultats de comptages
manuels effectués sur des placettes de contrôle. De même, le poids moyen d’une baie Pu est une
entrée de l’algorithme.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 38/39
Expérimentations 2015
Le dispositif autonome d’acquisition d’images a été exploité sur une parcelle de cépage rouge
(Merlot) et une parcelle de cépage blanc (Sauvignon) (Figure 3). Sur chacune de ces parcelles, 2
modalités ont été testées (Vignes Effeuillées / Vignes Non Effeuillées) et 15 placettes de contrôles
sont suivies manuellement par modalité. Cinq campagnes de mesures ont été réalisées à des stades
clés du développement végétatif de la vigne : petit pois, fermeture de la grappe, mi-véraison,
maturité et vendanges.
Figure 3 : Résultats de détection sur les deux cépages. Les baies détectées sont marquées par un
cercle. Les baies affectées à un même groupe sont représentées de la même couleur.
Une campagne de mesure correspond à une acquisition d’images par parcelle, au prélèvement de
grappes et à leurs mesures afin de connaitre le poids des grappes, le nombre de baies par grappe, le
poids moyen des baies, le volume des baies et la compacité de la grappe. Des mesures
complémentaires ont été réalisées ponctuellement comme l’état des lieux de la parcelle, le
dénombrement des grappes par cep et la proportion de baies visibles. Les images sont acquises
pratiquement en continu, tous les mètres, au niveau de la zone fructifère par le dispositif fixé soit à
un quad soit à un tracteur. Les résultats d’analyse d’images ont pu ensuite être extrapolés à
l’ensemble de la parcelle. Ces estimations sont finalement converties en tonnes de raisin par parcelle
en s’appuyant sur des mesures du poids des baies réalisées en fin de campagne.
Conclusion
Le dispositif autonome d’acquisition d’images élaboré dans le cadre de ce projet est opérationnel.
Une première expérimentation très encourageante a été conduite en 2015. Une deuxième année de
test à la parcelle permettra d’affiner et de confirmer les premiers résultats. De plus, il est important
d’ouvrir le champ d’application du capteur sur d’autres cépages. Plusieurs questions doivent être
approfondies pour affiner au maximum les résultats et en extraire d’autres informations :
Définir le nombre de baies par parcelle issu des prises de mesures à des stades précoces,
ainsi que le nombre moyen de baies par pied,
Affiner sur plus de parcelles, avec un nouveau millésime,
Réduire la dépendance aux facteurs α et Pu dans le calcul du rendement par analyse
d’images, en réduisant l’échantillonnage agronomique en année 2, avec comme but ultime
de pouvoir se passer des mesures terrain pour la commercialisation de l’outil.
Affiner la méthode de mesure manuelle du poids des baies et l’adapter à l’industrialisation
du capteur.
Enfin, le système d’acquisition développé pourrait s’adapter à d’autres applications viticoles telles
que le suivi de la véraison, le contrôle de l’état sanitaire des grappes, l’estimation de la vigueur, ce
qui constitue des perspectives enthousiasmantes.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
Bordeaux Sciences Agro, le 2 février 2016 39/39
Bibliographie MURISIER F., JEANGROS B., AERNY J. 1986. Maitrise du rendement et maturité du raisin, Essai 1985. Revue suisse de viticulture arboriculture horticulture. 18 (3), p149-156.
CLINGELEFFER, P., DUNN, G., KRSTIC, M., MARTIN, S. 2001. Crop development, crop estimation and crop control to secure quality and production of major wine grape varieties: A national approach. tech. rep., Grape &Wine Research and Development Corporation.
DUNN, G., MARTIN, S. 2004. Yield prediction from digital image analysis: A technique with potential for vineyard assessments prior to harvest. Australian Journal of Grape and Wine Research, vol. 10, p196-198.
SERRANO, E., ROUSSEL, S., GONTIER, L., DUFOURCQ, T. 2005. Early estimation of vineyard yield: correlation between the volume of a Vitis vinifera bunch during its growth and its weight at harvest. Information and Technology for Sustainable Fruit and Vegetable Production, FRUTIC 05, Montpellier.
NUTSKE, S., ACHAR, S., BATES, T., NARASIMHAN, S., SINGH, S. 2011. Yield estimation in vineyards by visual grape detection. International Conference on Intelligent Robots and Systems.
GROSSETETE M., BERTHOUMIEU Y., DA COSTA J.-P., GERMAIN C., LAVIALLE O., GRENIER G. 2011. A new approach on early estimation of vineyard yield: site specific counting of berries by using a Smartphone. European Conference on Precision Agriculture, Prague.
KERESZTES, B., DA COSTA, J.P., GRENIER, G., GERMAIN, CH., DAVID BEAULIEU, X. 2014. A depth and color vision system for the automated detection of grape maturity. Procs. Of RHEA conference, pp. 85-93, Madrid.
ROSCHER, R., HERZOG, K., KUNKEL, A., KICHERER, A., TPFER, R., FRSTNER, W. 2014. Automated image analysis framework for high-throughput determination of grapevine berry sizes using conditional random fields, computers and electronics in agriculture.

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »
NOTES

Journée technique VITINNOV « Viticulture de précision : les capteurs à la loupe »

VITINNOV 1 cours du Général de Gaulle 33170 GRADIGNAN Tél : 05 57 35 07 65 Fax : 05 57 35 07 59 [email protected] www.vitinnov.fr


















