Upravljanje procesima pomoću računara · Projektovanje sistema za rad u realnom vremenu ..... 27...
135
Upravljanje procesima pomoću računara Srbijanka Turajlić Beograd, 2011.
Transcript of Upravljanje procesima pomoću računara · Projektovanje sistema za rad u realnom vremenu ..... 27...
Upravljanje procesima
pomoću računara
Srbijanka Turajlić
Beograd, 2011.

Sadržaj
1. Primena ra čunara u upravljanju procesima ..................... .............................. 1
1.1. UPRAVLJANJE PROCESIMA ............................................................................... 1 1.2. ISTORIJAT RAZVOJA PROCESNIH RAČUNARA ...................................................... 4 1.3. RAČUNARSKI SISTEMI ZA RAD U REALNOM VREMENU .......................................... 7 1.4. OSNOVNE FUNKCIJE RAČUNARA U UPRAVLJANJU PROCESOM .............................. 9
1.4.1. Informacione funkcije – akvizicija podataka ..................................................... 9 1.4.2. Upravljačke funkcije .......................................................................................13 1.4.3. Direktno-digitalno upravljanje .........................................................................14 1.4.4. Plansko upravljanje ........................................................................................14 1.4.5. Supervajzorsko upravljanje ............................................................................16
1.5. HIJERAHIJSKO UPRAVLJANJE PROCESIMA POMOĆU RAČUNARA ......................... 17 1.6. CENTRALIZOVANO I DISTRIBUIRANO RAČUNARSKO UPRAVLJANJE ...................... 20 1.7. INTEGRISANA ARHITEKTURA SISTEMA .............................................................. 23
2. Projektovanje sistema za rad u realnom vremenu . ..................................... 27 2.1. SPREZANJE PROCESA I RAČUNARA ................................................................. 27
2.1.1. Računarski sistem za upravljanje grejačem vazduha .....................................29 2.2. REALIZACIJA AKTIVNOSTI UNUTAR JEDNOG VREMENSKOG CIKLUSA .................... 30
2.2.1. Upravljački zadatak ........................................................................................31 2.2.2. Vremenski dijagram ........................................................................................32
2.3. PROJEKTOVANJE RAČUNARSKE APLIKACIJE ..................................................... 33 2.4. KLASIFIKACIJA PROGRAMA ............................................................................. 36
3. Direktno digitalno upravljanje (DDC) ........... ................................................. 39
3.1. UVOD .......................................................................................................... 39 3.2. PROJEKTOVANJE DIGITALNIH SISTEMA DISKRETIZACIJOM KONTINUALNIH SISTEMA 41
3.2.1. Diskretizacija na osnovu reprodukcije izlaznog signala ..................................43 3.2.2. Usaglašavanje frekvencijskih karakteristika ....................................................46 3.2.3. Preslikavanje polova i nula (Matched z-transform) .........................................48 3.2.4. Numeričke aproksimacije ...............................................................................50 3.2.5. Tustinova aproksimacija .................................................................................53
4. Izbor periode odabiranja ....................... ......................................................... 61 4.1. UVOD .......................................................................................................... 61
4.2. PROCENA PERIODE ODABIRANJA NA BAZI KARAKTERISTIKA SISTEMA .................. 64 4.2.1. Propusni opseg i vreme uspona .....................................................................64 4.2.2. Transportno kašnjenje i pretek faze ................................................................66 4.2.3. Polovi sa negativnim realnim delom – odzvanjanje .........................................68
4.3. EKSPERIMENTALNO ODREĐIVANJE PERIODE ODABIRANJA ................................. 68
5. PID kontroleri ................................. ................................................................. 75 5.1. LINEARNI ZAKONI UPRAVLJANJA ..................................................................... 75 5.2. PODEŠAVANJE PARAMETARA KONTINUALNOG PIDA ......................................... 81
5.2.1. Snimanje odskočnog odziva ...........................................................................82 5.2.2. Procena amplitudne i fazne karakteristike na granici stabilnosti .....................83 5.2.3. Eksperimentalno određivanje oscilatorne granice stabilnosti ..........................86
5.3. DISKRETNI PID............................................................................................. 88 5.3.1. Diskretizacija integralnog dejstva ...................................................................88
5.3.2. Diskretizacija diferencijalnog dejstva .............................................................. 89 5.3.3. Praktična realizacija diferencijalnog dejstva ................................................... 90
5.4. REALIZACIJA DISKRETNOG PIDA ..................................................................... 91 5.4.1. Različite strukture PIDa ................................................................................. 93
5.5. PODEŠAVANJE PARAMETARA DIGITALNOG PIDA ............................................... 94 Goff ......................................................................................................................... 95 Smith ....................................................................................................................... 95 Takahashi ................................................................................................................ 95
6. Implementacija kontrolera ...................... ..................................................... 101 6.1. UVOD ........................................................................................................ 101 6.2. PROMENA REŽIMA RADA .............................................................................. 101
6.2.1. Postavljanje početnih uslova PIDa ............................................................... 104 6.2.2. Promena strukture PIDa .............................................................................. 108
6.3. NAVIJANJE INTEGRATORA ............................................................................ 110 6.4. PROJEKTOVANJE KONTROLERA SA OBSERVEROM .......................................... 112
6.4.1. Kontroler sa dve povratne sprege ................................................................ 112 6.4.2. Projektovanje upravljanja na osnovu modela u prostoru stanja ................... 114 6.4.3. Projektovanje upravljanja sa observerom ..................................................... 118
6.5. FILTRACIJA MERNIH SIGNALA ........................................................................ 123 6.5.1. Poremećaji visokih učestanosti .................................................................... 123 6.5.2. Kontinualni i digitalni filtri u povratnoj sprezi ................................................. 125 6.5.3. Filtracija usrednjavanjem signala ................................................................. 130
Rac_up/1
1. PRIMENA RAČUNARA U UPRAVLJANJU PROCESIMA
1.1. UPRAVLJANJE PROCESIMA
Upravljanje kao intui tvni izbor opcija Prema Vebsterovom rečniku "proces je prirodna operacija koja se progresivno
odvija kroz niz postepenih promena koje slede jedna drugu na relativno utvrđen način i vode ka određenom rezultatu ili ishodu, ili veštačka ili voljno izazvana progresivna operacija koja se sastoji od niza upravljanih akcija ili pokreta koji su sistematično usmereni ka određenom rezultatu ili cilju".
U osnovi, dakle, proces vodi ka ostvarenju nekog cilja. Međutim, nezavisno od vrste pojedinog procesa, činjenica je da se on nikad ne nalazi potpuno izolovan od svoje okoline, koja na njega utiče na čitav niz raznovrsnih načina. To zapravo znači da nijedan proces, sam po sebi, ne ispunjava u potpunosti postavljene zahteve. Štaviše, u prirodi je ljudi da traže više i bolje, što se, kad je u pitanju industrijski proces, svodi na zahtev da se poveća produktivnost, smanji utrošak energije, poveća kvalitet itd. Ovako postavljeni zahtevi mogu se ispuniti ako se na neki način, spoljnim dejstvom, upravlja izvršavanjem procesa.
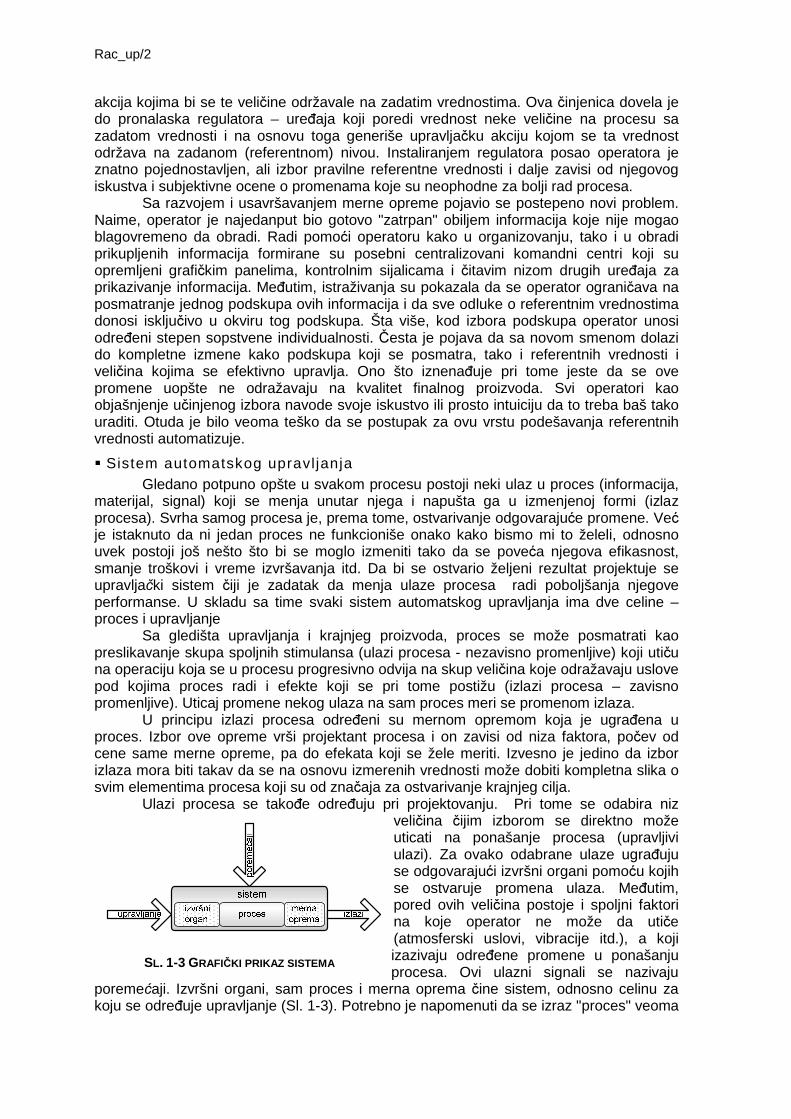
Upravljanje jednim procesom može se shvatiti kao izbor jednog od mogućih načina funkcionisanja procesa (Sl. 1-1). Još od najstarijih vremena, sa prvim procesima čije efekte je čovek želeo da koristi, javila se potreba za upravljanjem. Tako, na primer, u kamenom dobu čovek koji je održavao vatru morao je da odluči koju količinu drveta, koje dimenzije i stepena vlažnosti će da stavi u vatru da bi dobio odgovarajući plamen za kuvanje, grejanje ili slanje dimnih signala. Sposobnost čoveka – operatora na procesu – da tokom rada uočava efekte pojedinih odluka na proces i da na osnovu tako stečenog iskustva donosi odluku vodila je ka usavršavanju veštine upravljanja. Može se slobodno reći da je upravljanje u to vreme bila individualna umetnost koja je počivala na sposobnosti operatora da prepozna uslove pod kojima proces radi i da intuitivno odabere odgovarajuću upravljačku akciju. Iskustvo kojim je pećinski čovek održavao vatru, nastavili su i razvili, svako na svoj način, i kovač koji je podešavajući temperaturu ostvarivao najpovoljnije usijanje gvožđa i domaćica koja je ložeći vatru u štednjaku održavala temperaturu koja je odgovarala datoj vrsti jela ili kolača.
Sa razvojem ljudskog društva proizvodni procesi su postajali sve složeniji, a time je rastao i broj mogućih pristupa njihovom upravljanju. Istovremeno, rasla je i sposobnost
korisnika da što precizniju specifikuju zahteve u pogledu kvaliteta finalnog proizvoda. Subjektivno procenjivanje uslova pod kojima se neki proces odvija zamenjeno je preciznim merenjima svih relevantnih parametara. Projektovanje i ugradnja merne opreme u proces omogućila je operatorima da mnogo lakše donose odluke o izboru upravljačkih akcija (Sl. 1-2). Šta više, neke upravljačke procedure postale su standardizovane. Ipak, konačna odluka i izvršavanje neke upravljačke akcije i dalje je zavisila od samog čoveka.
Vremenom je postalo jasno da kvalitet čitavog niza proizvoda zavisi od toga da li su u
procesu njihove proizvodnje održavani konstantni temperatura, pritisak, nivo, protok i slično. Pri tome, kada se jedanput odredi vrednost odgovarajućih fizičkih veličina, zadatak operatora bio je sveden samo na stalnu proveru tih vrednosti i preduzimanje uvek sličnih
SL. 1-1 UPRAVLJANJE KAO INTUITIVNI IZBOR MOGUĆIH OPCIJA
SL. 1-2 UPRAVLJANJE KAO INFORMISANI IZBOR MOGUĆIH OPCIJA
Rac_up/2
akcija kojima bi se te veličine održavale na zadatim vrednostima. Ova činjenica dovela je do pronalaska regulatora – uređaja koji poredi vrednost neke veličine na procesu sa zadatom vrednosti i na osnovu toga generiše upravljačku akciju kojom se ta vrednost održava na zadanom (referentnom) nivou. Instaliranjem regulatora posao operatora je znatno pojednostavljen, ali izbor pravilne referentne vrednosti i dalje zavisi od njegovog iskustva i subjektivne ocene o promenama koje su neophodne za bolji rad procesa.
Sa razvojem i usavršavanjem merne opreme pojavio se postepeno novi problem. Naime, operator je najedanput bio gotovo "zatrpan" obiljem informacija koje nije mogao blagovremeno da obradi. Radi pomoći operatoru kako u organizovanju, tako i u obradi prikupljenih informacija formirane su posebni centralizovani komandni centri koji su opremljeni grafičkim panelima, kontrolnim sijalicama i čitavim nizom drugih uređaja za prikazivanje informacija. Međutim, istraživanja su pokazala da se operator ograničava na posmatranje jednog podskupa ovih informacija i da sve odluke o referentnim vrednostima donosi isključivo u okviru tog podskupa. Šta više, kod izbora podskupa operator unosi određeni stepen sopstvene individualnosti. Česta je pojava da sa novom smenom dolazi do kompletne izmene kako podskupa koji se posmatra, tako i referentnih vrednosti i veličina kojima se efektivno upravlja. Ono što iznenađuje pri tome jeste da se ove promene uopšte ne odražavaju na kvalitet finalnog proizvoda. Svi operatori kao objašnjenje učinjenog izbora navode svoje iskustvo ili prosto intuiciju da to treba baš tako uraditi. Otuda je bilo veoma teško da se postupak za ovu vrstu podešavanja referentnih vrednosti automatizuje.
Sistem automatskog upravljanja Gledano potpuno opšte u svakom procesu postoji neki ulaz u proces (informacija,
materijal, signal) koji se menja unutar njega i napušta ga u izmenjenoj formi (izlaz procesa). Svrha samog procesa je, prema tome, ostvarivanje odgovarajuće promene. Već je istaknuto da ni jedan proces ne funkcioniše onako kako bismo mi to želeli, odnosno uvek postoji još nešto što bi se moglo izmeniti tako da se poveća njegova efikasnost, smanje troškovi i vreme izvršavanja itd. Da bi se ostvario željeni rezultat projektuje se upravljački sistem čiji je zadatak da menja ulaze procesa radi poboljšanja njegove performanse. U skladu sa time svaki sistem automatskog upravljanja ima dve celine – proces i upravljanje
Sa gledišta upravljanja i krajnjeg proizvoda, proces se može posmatrati kao preslikavanje skupa spoljnih stimulansa (ulazi procesa - nezavisno promenljive) koji utiču na operaciju koja se u procesu progresivno odvija na skup veličina koje odražavaju uslove pod kojima proces radi i efekte koji se pri tome postižu (izlazi procesa – zavisno promenljive). Uticaj promene nekog ulaza na sam proces meri se promenom izlaza.
U principu izlazi procesa određeni su mernom opremom koja je ugrađena u proces. Izbor ove opreme vrši projektant procesa i on zavisi od niza faktora, počev od cene same merne opreme, pa do efekata koji se žele meriti. Izvesno je jedino da izbor izlaza mora biti takav da se na osnovu izmerenih vrednosti može dobiti kompletna slika o svim elementima procesa koji su od značaja za ostvarivanje krajnjeg cilja.
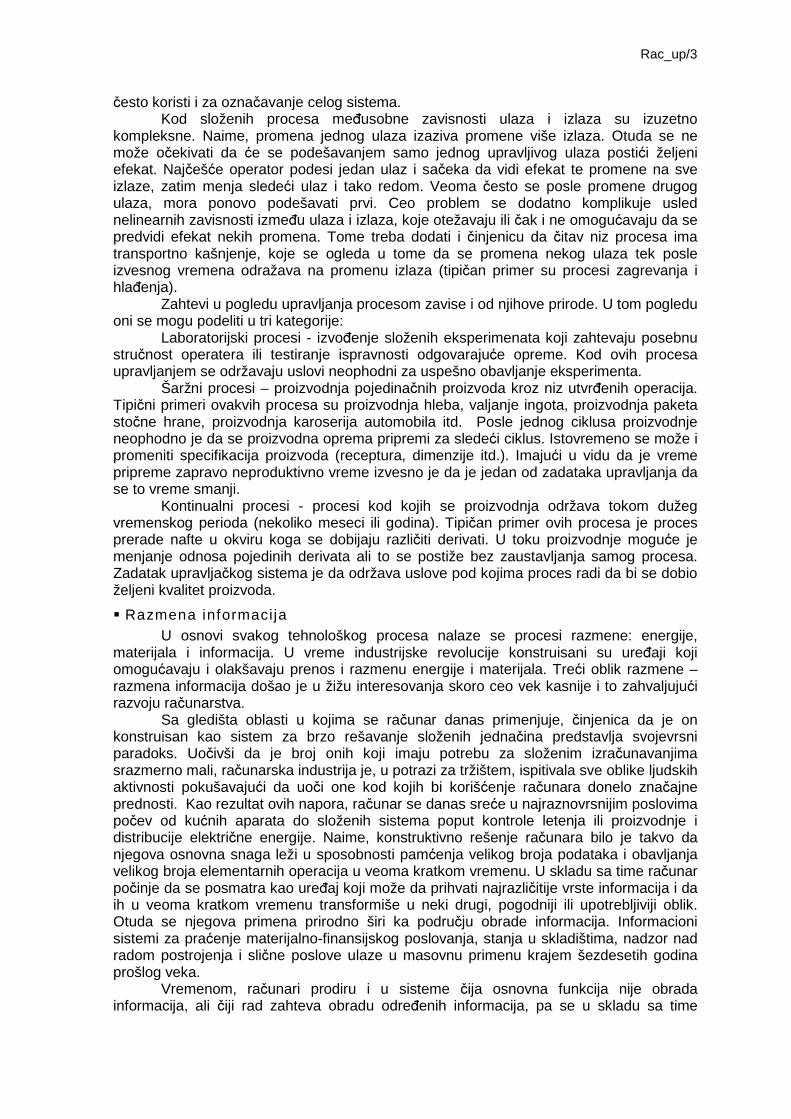
Ulazi procesa se takođe određuju pri projektovanju. Pri tome se odabira niz veličina čijim izborom se direktno može uticati na ponašanje procesa (upravljivi ulazi). Za ovako odabrane ulaze ugrađuju se odgovarajući izvršni organi pomoću kojih se ostvaruje promena ulaza. Međutim, pored ovih veličina postoje i spoljni faktori na koje operator ne može da utiče (atmosferski uslovi, vibracije itd.), a koji izazivaju određene promene u ponašanju procesa. Ovi ulazni signali se nazivaju
poremećaji. Izvršni organi, sam proces i merna oprema čine sistem, odnosno celinu za koju se određuje upravljanje (Sl. 1-3). Potrebno je napomenuti da se izraz "proces" veoma
SL. 1-3 GRAFIČKI PRIKAZ SISTEMA
Rac_up/3
često koristi i za označavanje celog sistema. Kod složenih procesa međusobne zavisnosti ulaza i izlaza su izuzetno
kompleksne. Naime, promena jednog ulaza izaziva promene više izlaza. Otuda se ne može očekivati da će se podešavanjem samo jednog upravljivog ulaza postići željeni efekat. Najčešće operator podesi jedan ulaz i sačeka da vidi efekat te promene na sve izlaze, zatim menja sledeći ulaz i tako redom. Veoma često se posle promene drugog ulaza, mora ponovo podešavati prvi. Ceo problem se dodatno komplikuje usled nelinearnih zavisnosti između ulaza i izlaza, koje otežavaju ili čak i ne omogućavaju da se predvidi efekat nekih promena. Tome treba dodati i činjenicu da čitav niz procesa ima transportno kašnjenje, koje se ogleda u tome da se promena nekog ulaza tek posle izvesnog vremena odražava na promenu izlaza (tipičan primer su procesi zagrevanja i hlađenja).
Zahtevi u pogledu upravljanja procesom zavise i od njihove prirode. U tom pogledu oni se mogu podeliti u tri kategorije:
Laboratorijski procesi - izvođenje složenih eksperimenata koji zahtevaju posebnu stručnost operatera ili testiranje ispravnosti odgovarajuće opreme. Kod ovih procesa upravljanjem se održavaju uslovi neophodni za uspešno obavljanje eksperimenta.
Šaržni procesi – proizvodnja pojedinačnih proizvoda kroz niz utvrđenih operacija. Tipični primeri ovakvih procesa su proizvodnja hleba, valjanje ingota, proizvodnja paketa stočne hrane, proizvodnja karoserija automobila itd. Posle jednog ciklusa proizvodnje neophodno je da se proizvodna oprema pripremi za sledeći ciklus. Istovremeno se može i promeniti specifikacija proizvoda (receptura, dimenzije itd.). Imajući u vidu da je vreme pripreme zapravo neproduktivno vreme izvesno je da je jedan od zadataka upravljanja da se to vreme smanji.
Kontinualni procesi - procesi kod kojih se proizvodnja održava tokom dužeg vremenskog perioda (nekoliko meseci ili godina). Tipičan primer ovih procesa je proces prerade nafte u okviru koga se dobijaju različiti derivati. U toku proizvodnje moguće je menjanje odnosa pojedinih derivata ali to se postiže bez zaustavljanja samog procesa. Zadatak upravljačkog sistema je da održava uslove pod kojima proces radi da bi se dobio željeni kvalitet proizvoda.
Razmena informacija U osnovi svakog tehnološkog procesa nalaze se procesi razmene: energije,
materijala i informacija. U vreme industrijske revolucije konstruisani su uređaji koji omogućavaju i olakšavaju prenos i razmenu energije i materijala. Treći oblik razmene – razmena informacija došao je u žižu interesovanja skoro ceo vek kasnije i to zahvaljujući razvoju računarstva.
Sa gledišta oblasti u kojima se računar danas primenjuje, činjenica da je on konstruisan kao sistem za brzo rešavanje složenih jednačina predstavlja svojevrsni paradoks. Uočivši da je broj onih koji imaju potrebu za složenim izračunavanjima srazmerno mali, računarska industrija je, u potrazi za tržištem, ispitivala sve oblike ljudskih aktivnosti pokušavajući da uoči one kod kojih bi korišćenje računara donelo značajne prednosti. Kao rezultat ovih napora, računar se danas sreće u najraznovrsnijim poslovima počev od kućnih aparata do složenih sistema poput kontrole letenja ili proizvodnje i distribucije električne energije. Naime, konstruktivno rešenje računara bilo je takvo da njegova osnovna snaga leži u sposobnosti pamćenja velikog broja podataka i obavljanja velikog broja elementarnih operacija u veoma kratkom vremenu. U skladu sa time računar počinje da se posmatra kao uređaj koji može da prihvati najrazličitije vrste informacija i da ih u veoma kratkom vremenu transformiše u neki drugi, pogodniji ili upotrebljiviji oblik. Otuda se njegova primena prirodno širi ka području obrade informacija. Informacioni sistemi za praćenje materijalno-finansijskog poslovanja, stanja u skladištima, nadzor nad radom postrojenja i slične poslove ulaze u masovnu primenu krajem šezdesetih godina prošlog veka.
Vremenom, računari prodiru i u sisteme čija osnovna funkcija nije obrada informacija, ali čiji rad zahteva obradu određenih informacija, pa se u skladu sa time
Rac_up/4
njihova performansa može znatno unaprediti efikasnom i blagovremenom obradom informacija. Ako se, naime, prihvati tvrdnja da upravljati znači odabirati između različitih mogućnosti, onda se informacija kao neophodni preduslov za obavljanje valjanog izbora javlja kao bitni elemenat pri upravljanju procesima i to na svim nivoima. Upravi preduzeća informacije su potrebne radi planiranja poslovanja, rukovodiocima pogona za detaljno planiranje proizvodnje i ocenu performansi, operatorima na pojedinim procesima za obavljanje zadatog plana proizvodnje. Konačno, uređajima na procesu neophodne su informacije, u formi signala, koje dolaze sa mernih instrumenata da bi se odredile odgovarajuće upravljačke strategije koje ti uređaji ostvaruju. Imajući u vidu ovu ključnu ulogu koju informacija ima u upravljanju (bilo da se radi o uređaju, procesu, postrojenju, pogonu ili celom preduzeću) računar se kao sistem koji ima sposobnost da prihvata, analizira i prenosi veliku količinu informacija, velikom brzinom, tačnošću i fleksibilnošću, javlja kao prirodni izbor sredstva za upravljanje procesima.
1.2. ISTORIJAT RAZVOJA PROCESNIH RA ČUNARA Prve ideje o primeni računara kao sastavnih delova sistema za upravljanje
procesima javljaju se tokom 50-ih godina. Razvoj teorije upravljanja doveo je do formulisanja niza algoritama koje je bilo potrebno na neki način i realizovati. U želji da se ostvari izvesna fleksibilnost sistema koji realizuje upravljanje činilo se prirodnim da se taj posao poveri računarima. Istini za volju u to vreme je preovladavalo mišljenje da bi to mogli biti analogni računari, mada ni mogućnost primene digitalnih računara nije isključena. Industrija digitalnih računara, međutim, prihvata ovu ideju i okreće se ka jedinom tržištu koje je u to vreme pokazivalo interes – vojnoj industriji. Otuda je 1954. godine proizveden prvi računar namenjen upravljanju procesima koji je korišćen za realizaciju autopilota i automatsko upravljanje oružjem. Imajući u vidu mogućnosti računara na tom stepenu razvoja, kao i zahteve koje realizacija autopilota postavlja u pogledu brzine obrade podataka, prirodno je da ti napori nisu urodili očekivanim rezultatima. Drugim rečima, računarska industrija otkriva da vojna industrija svakako ne predstavlja tržište na kome se mogu razvijati i plasirati računarski sistemi za upravljanje procesima.
Uočavajući uzroke problema primene računara u upravljanju letilicama, računarska industrija shvata da je neophodno da tržište potraži na drugom mestu. Traži se industrija koja ima dovoljno sredstva za ulaganje u razvoj, u kojoj su procesi daleko sporiji i konačno kod koje se čitav niz korisnih efekata može postići i samom obradom informacija bez nužnog zatvaranja povratne sprege. Polazeći od ovih zahteva računarska industrija se prirodno okreće prema elektro i naftnoj industriji. Primat instalacije računara u industriji pripada elektrodistribuciji u državi Luizijana (SAD), koja je u septembru 1958. godine pustila u rad računar za praćenje i nadzor rada električne centrale u mestu Sterling. Prvo računarsko upravljanje nekim postrojenjem vezuje se za kompaniju Texaco, koja je instalirala računar u rafineriji u Port Arturu (SAD), gde je 15. marta 1959. godine ostvareno upravljanje u zatvorenoj sprezi.
Ideja o formiranju nadzorno-upravljačkih računarskih sistema stara je, dakle, skoro pola veka. Uprkos prvim uspesima, primena računara nije zabeležila neki spektakularan napredak. Tokom šezdesetih godina iskristalisale su se specifičnosti računarske opreme za nadzor i upravljanje procesom i pristupilo se razvijanju specijalizovanih računarskih sistema za procesnu industriju (General Electric – серија 4000, Ferranti Argus, IBM 1800,CDC 1700, SDS, Foxboro FOX 1, Varian 620i itd). Nastojanja da se reše problemi vezani za on-line akviziciju podataka i zadavanje komandi izvršnim organima, kao i za brzinu obrade podataka doveli su do povećanja cene računarske opreme. Otuda se primena računara, sa ekonomske tačke gledišta, mogla pravdati samo u slučaju kada se jedan računar koristi za više funkcija na nekom složenom procesu. Posledica zahteva za složenim upravljanjem bila je potreba za izuzetno složenim softverom. Pokazalo se da se programi za korišćenje ovakvih računarskih sistema više ne mogu pisati u mašinskom kodu i da oni zahtevaju više memorije od one sa kojom su računari tada raspolagali.
Sredinu šezdesetih godina obeležila je pojava industrijskih miniračunara za rad u
Rac_up/5
realnom vremenu (DEC PDP-8 i PDP-11, Varian 68 i 73, Telemechanique T-2000, Mitra 15, Data General Nova …), razvoj specijalizovanog softvera koji je obuhvatao više programske jezike za formiranje nadzorno-upravljačkih aplikacija (PROCOL, PEARL, CORAL), kao i operativne sisteme za rad u realnom vremenu. Cena mini računara bila je dovoljno niska da se odustane od zahteva da jedan računar obavlja više raznorodnih poslova. Početkom 70-tih godina instalacija čak dva računara na jednom procesu, od kojih jedan služi kao rezerva, dobija ekonomsko opravdanje.
Pored ekonomskih aspekata, stručnjaci koji rade u procesnoj industriji pružali su svojevrsan otpor prema uvođenju računara. Naime, s obzirom na vrstu i prirodu posla u procesnoj industriji, nesumnjivo je da primena nedovoljno ispitanih metoda i tehnologija može da predstavlja značajan rizik i to ne samo sa finansijske tačke gledišta, već i u pogledu bezbednosti ljudi koji rade na procesu i ugrožavanja okoline u ekološkom smislu. Budući da svaka greška može da ima katastrofalne posledice, ljude zaposlene u procesnoj industriji karakteriše izvestan konzervativizam u prihvatanju radikalno novih ideja. Sve dok se takve ideje ne provere i ne pokažu kao visoko pouzdane, postoji otpor njihovom prihvatanju. Otuda se čini prirodnim da sve dotle dok nije stvorena mogućnost da se na izuzetno osetljivim mestima udvoji računarska oprema ili na neki drugi način omogući nesmetani nastavak rada u slučaju potencijalnog otkaza računara, inženjeri u procesnoj industriji nisu iskazivali preterano oduševljenje za primenu računara.
Primena računara na većim tehnološkim postrojenjima uvek je obrazlagana tvrdnjom da će i malo povećanje produktivnosti (recimo 1% do 2%) opravdati troškove njegovog uvođenja. Paradoksalna je činjenica da analize iz tog vremena pokazuju da gotovo ni u jednom sistemu, posle uvođenja računara nije bilo moguće utvrditi da je direktno postignuto neko poboljšanje. Razlog što se sa instaliranjem računarske opreme ipak nastavilo leži u činjenici da je on donosio niz nekih drugih prednosti. Dakle, nezavisno od početnog motiva, uvek se pokazivalo da je uvođenje računara u znatnoj meri uticalo na povećano razumevanje samog procesa. Ovo je proisticalo delimično iz neophodnosti da se u procesu projektovanja računarskog sistema proces detaljno prouči, a delimično iz obilja podataka prikupljenih pomoću računara u toku rada samog procesa. Ovako akumulirano znanje je, nadalje, omogućavalo projektovanje sistema za nadzor procesa, čiji je zadatak održavanje procesa u željenim radnim uslovima. Isto tako, uočeni su i veliki gubici u vremenu prilikom zaustavljanja i ponovnog puštanja pogona u rad, pa su razvijeni posebni postupci kojima bi se smanjili ovakvi zastoji u proizvodnji. Konačno, posle instaliranja računarskog sistema uvek su uočavane nove mogućnosti njegovog korišćenja.
S obzirom na gabarit, a donekle i cenu, miniračunari su korišćeni prvenstveno za akviziciju podataka, supervajzorsko upravljanje - generisanje referentnih signala za servomehanizme koji su bili instalirani na pojedinim delovima procesa kao zasebne celine i nadzor nad radom procesa. U slučaju da se nije radilo o preterano brzom procesu kroz mini računar su se zatvarale i povratne sprege. Komunikacioni drajveri, koji su se u to vreme mogli dobiti od proizvođača opreme najčešće nisu bili dovoljno efikasni tako da je, gotovo uvek, bilo neophodno da se delovi softvera za komunikaciju sa procesom i operatorskim panelom formiraju u svakom pojedinačnom slučaju i to najčešće u asembleru.
Primena miniračunara zahtevala je od inženjera upravljanja da detaljno poznaje sam računar, njegov mašinski jezik i operativni sistem, kao i industrijske U/I uređaje koji se na njega vezuju. U aplikativnom smislu miniračunar je doveo do razvoja različitih optimizacionih tehnika za realizaciju supervajzorskog upravljanja, kao i tehnika obrade po-dataka sa krajnjim ciljem identifikacije matematičkog modela. Različite upravljačke strategije su bile primenjivane samo na pilot postrojenjima. Naime, korišćenje računara za upravljanje u zatvorenoj sprezi moglo se ekonomski opravdati samo ako se kroz njega zatvori nekoliko desetina sprega, a to je podrazumevalo klasične petlje sa PID regula-torima ili integro-diferencijalnim kompenzatorima. Efekat koji bi se dobio zatvaranjem samo jedne adaptivne ili optimalne sprege nije bio dovoljan u poređenju sa cenom instali-rane opreme.
Rac_up/6
Sa gledišta zaposlenih u procesnoj industriji miniračunar je doneo svojevrsnu revoluciju na nivou dispečera i tehnologa. I jedni i drugi dobili su obilje, mahom štampanih, podataka na osnovu kojih su vršene različite analize u cilju poboljšanja kvaliteta procesa. Na nivou operatera nije se desila značajna promena. Računarski terminali su bili tek u povoju, tako da se kao korisnički interfejs najčešće koristio teleprinter. Shodno tome, operatorski pult i panel su ostali gotovo neizmenjeni i samom operateru je bilo svejedno da li komanda koju zadaje ide direktno na neki rele ili u računar, kao i odakle dolazi signal koji pali kontrolnu sijalicu.
Formiranje prvih mikroračunara početkom sedamdesetih godina predstavlja pravu revoluciju u procesnoj primeni računara. U jesen 1971. godine Intel izbacuje na tržište mi-kroprocesor 4004. Ubrzo zatim sledi sistem Intel 8008, pa Motorolla 6800, Z-80 itd. Računari zasnovani na ovim procesorima odlikovali su se visoko integrisanom tehnologi-jom, koja je dovela do izuzetno malih gabarita, veoma niskom cenom, velikom fleksibilnošću i pouzdanošću. Na žalost ili na sreću odlikovali su se još nečim - potpunim odsustvom korisničkog softvera. Ova činjenica dovela je do toga da procesna primena računara krene u sasvim drugačijem smeru.
Činjenicu da je mikroračunar malih dimenzija i niske cene inženjeri upravljanja dočekali su raširenih ruku. Konačno se došlo do uređaja koji može da radi u realnom vremenu i na kome je isplativo da se zatvori samo jedna povratna sprega u okviru koje se mogu isprobati, pa na kraju i realizovati različiti digitalni upravljački algoritmi. Za trenutak je zaboravljena upravljačko-nadzorna funkcija računara i pažnja je usmerena na najniži procesni nivo na kome je počela zamena klasičnih analognih regulatora, digitalnim realizovanim pomoću mikroračunara. Ovaj trend bio je sa jedne strane svakako indukovan svojevrsnom dugogodišnjom težnjom inženjera upravljanja da projektuju sisteme za rad u realnom vremenu, ali je na to izvesno uticala i činjenica da je primena mikroračunara, koji su imali samo rudimentarni operativni sistem i asembler, bila izuzetno složena i odvraćala i one najambicioznije od nekih složenijih nadzorno-upravljačkih zahvata.
U nastojanju da se mikroračunari učine što prisutnijim u procesnoj industriji, proizvođači su se prirodno okrenuli ka rešavanju onih zadataka koji su, sa jedne strane bili najrasprostanjeniji, a sa druge relativno jednostavni za programiranje. Tako se prirodno došlo do razvoja PLC-ova (programabilnih logičkih kontrolera) namenjenih prvobitno za zamenu logičkih kola i sekvencijalnih elemenata koji su bili realizovani pomoću banke releja, tajmera, brojača i drugih hardverskih digitalnih komponenti. Postepeno repertoar operacija PLC-a se širio i uključivao i složenije operacije koje je zahtevala realizacija digitalnog upravljanja.
U osnovi PLC je projektovan za rad u izuzetno nepovoljnim klimo-tehničkim uslovima koji vladaju na industrijskim postrojenjima. On je veoma pouzdan, jednostavan za održavanje i programiranje. PLC nije zamišljen kao računar opšte namene, već kao sistem čiji operativni sistem omogućava da se jednostavno i u realnom vremenu obavi akvizicija velikog broja podataka, izvesna, ne preterano složena obradu tih podataka i prenošenje rezultata obrade na izvršne organe. Pored toga, PLC je zamišljen kao modularan sistem na koji se, prema potrebi, mogu priključiti raznovrsni ulazno/izlazni moduli. Vremenom, gama U/I modula se širila tako da su formirani specijalizovani merno-pretvarački moduli u kojima se merni signali obrađuju na izuzetno složen način, kao i izlazni moduli koji sadrže regulatore pojedinih izvršnih organa. Nesumnjivo je da je sa razvojem PLC-ova definitivno rešen problem zatvaranja povratne sprege pri upravljanju industrijskim procesima.
Razvoj PLC-ova, kao računarskih uređaja koji se sprežu direktno sa pojedinim delovima postrojenja, neminovno je vodio ka razvoju distribuiranih upravljačkih sistema. U prvo vreme na vrhu piramide bili su miniračunari, dok su PLC-ovi imali ulogu samo akvizicije podataka i prenošenja komandi. Kasnije su miniračunari zamenjeni industrijskim PC računarima, dok su PLC-ovi obogaćeni složenijim funkcijama. U svakom slučaju, ponovo se otvorilo pitanje koordinacije i nadzora. Dakle, posle gotovo pola veka od prve ideje da se računar primeni za formiranje nadzorno-upravljačkog sistema, inženjeri upravljanja našli su se gotovo na samom početku, istina u potpuno izmenjenim
Rac_up/7
tehnološkim uslovima, i otpočeli sa projektovanjem SCADA sistema (Supervisory Control and Data Acquisition).
Na današnjem stepenu razvoja računarske opreme i računarskih mreža, projektovanje računarski upravljanog sistema ostavlja veoma veliku slobodu u izboru rešenja. Poput slikara koji na novom platnu iscrtava svoje vizije ili vajara koji dletom u mermeru oblikuje svoj svet, tako i procesni inženjer koristi savremenu tehnologiju da preslika svoje ideje i znanja i time stvori bolji, pouzdaniji i efikasniji proizvodni sistem.
1.3. RAČUNARSKI SISTEMI ZA RAD U REALNOM VREMENU Za računarski sistem se kaže da radi u realnom vremenu onda kada je u stanju da
reaguje na spoljnje događaje u trenucima u kojima se oni dešavaju. Drugim rečima izraz "realno vreme" označava "vreme određeno u spoljnjem svetu".
Očigledno je da ovo baš i nije preterano srećno odabran termin, jer on sam po sebi nameće ideju da postoji i neko drugačije (nerealno) vreme. Radi se zapravo o činjenici da je ovaj tip primene računara nastao nešto kasnije i da se javila potreba da se jasno ukaže na bitnu odliku takve primene. Naime, računar je od samog početka korišćen za rešavanje niza zadataka koji se sreću u različitim ljudskim aktivnostima. Po pravilu bi sistem za čiji rad se tražilo rešenje bio analiziran u cilju formiranja matematičkog modela – sistema jednačina koji opisuju ponašanje sistema. Zatim bi se na samom sistemu izvršila merenja kao bi se odredili odgovarajućih parametri modela. Dobijeni podaci su se unosili u računar u kome je obavljana njihova obrada i dobijano traženo rešenje. Pri tome je vreme potrebno za dobijanje rešenja zavisilo isključivo od toga kada će podaci biti uneti u
računar i koliko dugo će trajati programska obrada tih podataka. Za to vreme, sistem je obavljao svoje aktivnosti u nekoj svojoj vremenskoj skali, izraženoj u delovima sekundi ako se radi o praćenju leta aviona, u sekundama kod mehaničkih sistema ili u minutima kod tehnoloških procesa. Ovakav postupak bio je označavan kao računarsko upravljanje radom sistema. Tek kasnije stvorena je mogućnost da se računar i fizički veže za spoljni sistem i da se celokupan postupak merenja, obrade, analize, pa i
primene rešenja vrši direktno tokom rada samog sistema, dakle u istoj vremenskoj skali u kojoj radi i sam sistem. Budući da je suštinska razlika između dva opisana postupka baš u vremenu u kome se oni odvijaju, prirodno je da se ovim terminom iskazuje činjenica da se u jednom slučaju računar koristi samo kao sredstvo za obradu (Sl. 1-4), potpuno nezavisno od vremena u kome sam sistem radi, dok se u drugom slučaju rad računara odvija u vremenu – realnom vremenu – u kome radi i sam sistem (Sl. 1-5).
Definicija računarskog sistema za rad u realnom vremenu implicitno uključuje nekoliko karakteristika ovakvog sistema. Pre svega, računarski sistem mora da bude spregnut sa spoljnim procesom preko posebnih procesnih ulazno/izlaznih uređaja. Zatim,
obrada podataka u računaru mora da se odvija u istoj vremenskoj skali u kojoj radi i spoljni proces. Konačno, ukoliko se spoljni događaji dešavaju simultano, računar mora biti u stanju da na njih i simultano reaguje, odnosno da uspostavi izvesnu hijerarhiju reakcija tako de se ne ugrozi rad procesa. Pored svih navedenih osobina, računarski
sistem koji radi u realnom vremenu može i da prati protok vremena i to tako što se neki od spoljnih događaja koji ga pobuđuju ponavljaju u jednakim
vremenskim intervalima. U skladu sa definicijom računarskog sistema koji radi u realnom vremenu izvesno
je da redosled izvođenja pojedinih operacija zavisi od protoka vremena ili od nastanka izvesnih događaja izvan računara. Istovremeno, rezultati pojedinih izračunavanja mogu
SL. 1-4 RAČUNAR KAO SREDSTVO ZA OBRADU PODATAKA
SL. 1-5 RAČUNAR KOJI RADI U REALNOM VREMENU
Rac_up/8
zavisiti od vrednosti promenljive "vreme" u trenutku izvođenja operacije ili od vremena potrebnog za izvođenje izračunavanja.
Pobude koje računar prima iz okruženja i koje upravljaju njegovim radom mogu se podeliti u nekoliko kategorija.
Vremenski događaj i Rad računarskog sistema se inicira u određenom trenutku vremena i tada se
obavlja jedan niz zadataka. Nakon toga sistem miruje u očekivanju sledećeg trenutka vremena kada se ponovo izvršavaju isti zadaci. Od ovakvog sistema se zahteva da sve zadatke obavi unutar zadanog vremenskog intervala.
Rad sistema zasnovan na protoku vremena karakterističan je za upravljanje u zatvorenoj povratnoj sprezi. Naime, u takvom sistemu treba izvršiti merenja određenih veličina, na osnovu rezultata merenja izračunati odgovarajuće upravljačke signale i preneti ih na izvršne organe procesa. Pri tome se, u skladu sa teorijom upravljanja diskretnim sistemima, zahteva da se opisane operacije periodično ponavljaju u vremenu. (Sama perioda, nadalje, zavisi od prirode procesa i o tome će kasnije biti više reči). To znači da se računarski program u okviru koga se realizuju opisane operacije mora izvršavati periodično i mora biti u stanju da obavi sve zahtevane funkcije u okviru jedne periode, da bi po njenom isteku bio spreman da ponovi ceo postupak.
Trenutak vremena u kome računar počinje novi ciklus obrade detektuje se najčešće pomoću sistema prekida.
Događaj i na procesu Rad računarskog sistema se inicira nastankom nekog stanja na procesu koje
preko odgovarajućeg senzora šalje odgovarajući signal računaru (zatvaranje nekog prekidača, dostizanje određene temperature, pritiska ili položaja i slično). Od sistema se očekuje da na neki unapred predviđen način reaguje na detektovani događaj (zatvaranje ventila ako je dostignut željeni nivo tečnosti, isključivanje grejača ako je ostvarena određena temperatura i sl.) i to u okviru nekog zadanog maksimalnog vremenskog intervala.
Događaji na procesu se najčešće koriste da označe da je jedna faza na procesu završena, te da može započeti sledeća faza. Pored toga, rad sistema zasnovan na spoljnjem događaju je posebno značajan za detekciju predhavarijskih stanja kada je potrebno preduzeti odgovarajuće mere da bi se sprečio nastanak havarije. U skladu sa time spoljni događaji se razvrstavaju po važnosti i za svaki nivo važnosti se predviđa odgovarajuće dozvoljeno vreme reakcije.
Detekcija događaja na procesu se najčešće ostvaruje uz pomoć sistema prekida koji informiše računar da se od njega očekuje odgovarajuća reakcija. Ukoliko reakcija na određene događaje nije posebno značajna za rad procesa oni se mogu detektovati i periodičnim pretraživanjem senzora koji se koriste kao indikatori nastanka događaja.
Operatorski događaj i - interakt ivni rad Spoljni događaj potiče od operatera koji upućuje zahtev da računar obavi neku
grupu zadataka. Ova vrsta pobude se u principu ne razlikuje od događaja na procesu. Suštinska razlika se međutim ogleda u zahtevanoj reakciji sistema. Naime, kod interaktivnih sistema se zahteva da srednje vreme odziva na spoljni događaj ne bude veće od neke zadane vrednosti. U tom smislu ovi sistemi imaju drugačije projektne zahteve i kod njih reakcija na spoljni događaj zavisi prevashodno od internog stanja sistema, a ne od značaja samog događaja.
Tipični primeri interaktivnih sistema su sistemi za rezervaciju karata, bankarsko poslovanje i slično.
Sistemski i programski događaj i Ovoj grupi pripadaju signali pobude kojima se ostvaruje komunikacija između
računara i perifernih uređaja (štampač, disk, terminal, itd.) ili između više računara u mreži.
Rac_up/9
Ova vrsta pobude sreće se i u računarima opšte namene. Drugim rečima, moglo bi se reći da u odnosu na svoje periferne uređaje svaki računar radi u realnom vremenu. Taj rad je nadziran od strane operativnog sistema, tako da korisnik o njemu ne mora da vodi računa, a najčešće mu operativni sistem i ne dozvoljava da u tom pogledu vrši bilo kakve intervencije.
U pogledu vremenskih zahteva razlikuju se dva osnovna tipa računarskih sistema
koji rade u realnom vremenu. • sistemi kod kojih je srednje vreme izvršavanja operacija, mereno na nekom
definisanom obimu posla, manje od zadanog maksimalnog vremena; • sistemi kod kojih se svaka grupa operacija mora završiti u okviru specificiranog
maksimalnog vremena. Samo se po sebi razume da je projektovanje ove dve kategorije sistema suštinski
različito. Prvoj kategoriji sistema pripadaju zapravo sistemi za obradu transakcija kod kojih se radi sa velikim bazama podataka i kod kojih je pažnja usmerena prevashodno na projektovanje baza i tehnike njihovog pretraživanja. Ovi sistemi se označavaju i kao "meki" sistemi za rad u realnom vremenu, jer nema značajnih posledica ukoliko se prekrše data vremenska ograničenja.
Drugoj kategoriji pripadaju sistemi za upravljanje proizvodnim i tehnološkim procesima. Kod takvih sistema sve zatvorene povratne sprege rade na principu vremenskih događaja (periode odabiranja). Budući da je za rad povratne sprege neobično važno da se svaki ciklus započne u tačno određenom vremenskom trenutku, ovi sistemi moraju poštovati zadano ograničenje u pogledu vremena pa se nazivaju i "tvrdi" sistemi za rad u realnom vremenu. Puštanje ovakvih sistema u rad, zaustavljanje i reakcije na moguće havarije realizuju se preko detektovanja događaja na procesu. Konačno, komunikacija operatera sa računarom, a time i samim procesom ostvaruje se na principu interaktivnog rada. Samo u ovom poslednjem domenu uslovi u pogledu vremena reakcije su donekle relaksirani i izraženi maksimalnim srednjim vremenom.
Kod sistema za upravljanje procesima od računara koji radi u realnom vremenu očekuje se i da kreira signale kojima će se aktivirati pojedini izvršni organi na procesu.
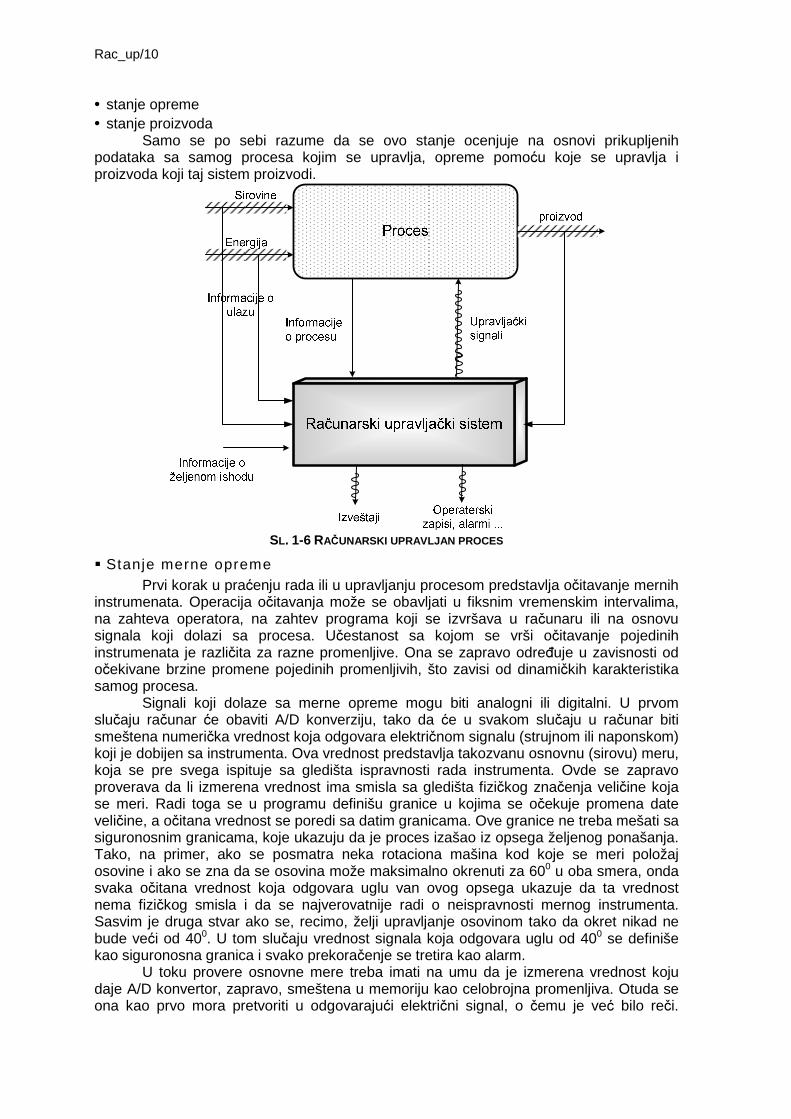
1.4. OSNOVNE FUNKCIJE RAČUNARA U UPRAVLJANJU PROCESOM Računar koji upravlja procesom prima informacije o ulaznim signalima, stanju na
procesu i željenom ishodu procesa. Na osnovu ovih informacija, odgovarajući algoritmi generišu upravljačke signale. Pored toga, u računaru se generiše i čitav niz izveštaja, kao i informacija koje pomažu rad operatera (Sl. 1-6). Imajući u vidu raznolikost poslova koje obavlja računar, njegove funkcije se mogu podeliti u dve kategorije: • informacione funkcije • upravljačke funkcije
1.4.1. INFORMACIONE FUNKCIJE – AKVIZICIJA PODATAKA Informacione funkcije koje obavlja računar odnose se na podatke iz procesa, kao
što su prikupljanje i sortiranje podataka, njihovo pamćenje, analiza i prikazivanje. Suštinsko obeležje svih informacionih funkcija jeste da se njima ne menja proces ni na koji način. Naime, računar u informacionoj funkciji obezbeđuje samo tačne i blagovremene informacije o procesu i na taj način pruža pomoć operatoru pri donošenju upravljačkih odluka. S obzirom na izuzetan razvoj grafičkih mogućnosti računara, informacione funkcije najčešće predstavljaju najimpresivniji deo njegove primene. Za realizaciju ovih funkcija razvijeni su posebni softverski alati o kojima će kasnije biti više reči.
Nezavisno od toga kakvu i koliko složenu upravljačku funkciju računar treba da obavi, prvi i neophodni korak u svemu tome je da se ustanove uslovi u kojima proces radi. Pod ovim uslovima se najčešće podrazumeva • stanje merne opreme
Rac_up/10
• stanje opreme • stanje proizvoda
Samo se po sebi razume da se ovo stanje ocenjuje na osnovi prikupljenih podataka sa samog procesa kojim se upravlja, opreme pomoću koje se upravlja i proizvoda koji taj sistem proizvodi.
SL. 1-6 RAČUNARSKI UPRAVLJAN PROCES
Stanje merne opreme Prvi korak u praćenju rada ili u upravljanju procesom predstavlja očitavanje mernih
instrumenata. Operacija očitavanja može se obavljati u fiksnim vremenskim intervalima, na zahteva operatora, na zahtev programa koji se izvršava u računaru ili na osnovu signala koji dolazi sa procesa. Učestanost sa kojom se vrši očitavanje pojedinih instrumenata je različita za razne promenljive. Ona se zapravo određuje u zavisnosti od očekivane brzine promene pojedinih promenljivih, što zavisi od dinamičkih karakteristika samog procesa.
Signali koji dolaze sa merne opreme mogu biti analogni ili digitalni. U prvom slučaju računar će obaviti A/D konverziju, tako da će u svakom slučaju u računar biti smeštena numerička vrednost koja odgovara električnom signalu (strujnom ili naponskom) koji je dobijen sa instrumenta. Ova vrednost predstavlja takozvanu osnovnu (sirovu) meru, koja se pre svega ispituje sa gledišta ispravnosti rada instrumenta. Ovde se zapravo proverava da li izmerena vrednost ima smisla sa gledišta fizičkog značenja veličine koja se meri. Radi toga se u programu definišu granice u kojima se očekuje promena date veličine, a očitana vrednost se poredi sa datim granicama. Ove granice ne treba mešati sa siguronosnim granicama, koje ukazuju da je proces izašao iz opsega željenog ponašanja. Tako, na primer, ako se posmatra neka rotaciona mašina kod koje se meri položaj osovine i ako se zna da se osovina može maksimalno okrenuti za 600 u oba smera, onda svaka očitana vrednost koja odgovara uglu van ovog opsega ukazuje da ta vrednost nema fizičkog smisla i da se najverovatnije radi o neispravnosti mernog instrumenta. Sasvim je druga stvar ako se, recimo, želji upravljanje osovinom tako da okret nikad ne bude veći od 400. U tom slučaju vrednost signala koja odgovara uglu od 400 se definiše kao siguronosna granica i svako prekoračenje se tretira kao alarm.
U toku provere osnovne mere treba imati na umu da je izmerena vrednost koju daje A/D konvertor, zapravo, smeštena u memoriju kao celobrojna promenljiva. Otuda se ona kao prvo mora pretvoriti u odgovarajući električni signal, o čemu je već bilo reči.
Rac_up/11
Moguće je naravno, da se u procesu provere ispravnosti instrumenta koristi i celobrojna vrednost, ali se u om slučaju mora uspostaviti veza između celobrojnih vrednosti i odgovarajućih fizičkih veličina.
Pored proveravanja granica, na neispravnost instrumenta može da ukazuje i niz merenja koja međusobno značajno odstupaju. Na primer, kada se proces nalazi u fazi zagrevanja, prirodno je da izmerena temperatura bude u stalnom porastu,pri čemu se u zavisnosti od toplotnih karakteristika materije koja se zagreva može predvideti i maksimalni očekivani porast između dva uzastopna očitavanja. Sukcesivna merenja u kojima bi temperatura čas rasla a čas opadala ili se menjala u neočekivano velikim skokovima ukazuju na neispravnost instrumenta.
Treba istaći da jedno pogrešno očitavanje nije dovoljno da bi se instrument okvalifikovao kao neispravan. Naime, ono uvek može da bude uzrokovano nekim spoljnim kratkotrajnim poremećajem koji se superponira na signal sa mernog instrumenta. Otuda je neophodno da se greška očitavanja detektuje u više sukcesivnih merenja pre nego što se signalizira neispravnost instrumenta. Posle preliminarne provere osnovnih mera vrši se njihova transformacija u jedinice fizičkih veličina. Budući da ova transformacija zapravo predstavlja relaciju preslikavanja prirodno je da se ona realizuje pomoću računara. Korišćenje računara omogućava i jednostavnu kalibraciju instrumenata kao i numeričku realizaciju različitih kompezacionih tehnika koje se koriste radi postizanja linearne zavisnosti između izmerene vrednosti i njoj odgovarajuće fizičke veličine. Računar, takođe pruža prednosti u slučaju eventualne zamene mernog instrumenta. Naime, upotreba drugačijeg zahteva jedino da se u programu promeni relacija preslikavanja , posle čega sistem može nesmetano da nastavi svoj rad.
Transformacijom izmerene veličine u fizičke jedinice ne završava se proces obrade mernog signala. Signal se, naime, dalje obrađuje sa ciljem da se iz raspoloživih podataka izvuče maksimalna informacija ili da se podaci obrade na najbolji mogući način. Ovde se, pre svega, misli na potrebu da se iz dobijenog signala eliminiše poremećaj (šum merenja) koji se javlja kao oscilacija visoke učestanosti superponirana preko osnovne krive. Ovo se postiže postupkom filtracije signala, odnosno propuštanjem signal kroz filter koji ima sposobnost da propušta samo niže učestanosti, a da odseca više. Pri tome, ovde pojam "propuštanja signala" treba shvatiti krajnje figurativno. Radi se zapravo o algoritmu (programu) kojim se realizuje ista operacija koju bi ostvario i neki fizički filter kroz koji bi se signal propuštao.
Pored filtracije, moguće je izvršiti i čitav niz drugih operacija nad signalom. Recimo, ako je merni instrument projektovan tako da pokazuje brzinu promene neke veličine, a želi se dobiti njen ukupan iznos,onda se vrši sabiranje sukcesivno prikupljenih podataka. Isto tako, ako instrument pokazuje ukupni iznos neke veličine, onda se oduzimanjem sukcesivnih vrednosti dobija informacija o brzini promene te veličine.
Ukoliko se ustanovi neispravnost u radu instrumenta, algoritam će o tome obavestiti operatora. To naravno, samo po sebi nije dovoljno, jer se mora odlučiti i šta će se, dok traje popravka ili zamena instrumenta, dešavati na procesu. Opšte važeći princip je da proces ne treba prekidati ako je to ikako moguće. U tom smislu, najčešće se neispravan merni podatak zamenjuje nekom brojnom vrednošću. To može biti poslednji ispravno izmereni podatak ili se, ako se želi veća tačnost, može na osnovu jednog broja prethodno izmerenih podataka proceniti kakvi bi trebalo da budu budući podaci (ekstrapolacija podataka). U svakom slučaju, dužnost je projektanta računarskog upravljanja, da u dogovoru sa tehnologom koji poznaje sam proces, unapred predvidi proceduru koja će se primeniti u tom slučaju i da za nju napiše odgovarajući program.
Napomenimo još, na kraju, da se danas proizvode merni instrumenti koji u sebi imaju mikroprocesor koji obavlja čitav niz navedenih operacija. Takav instrument se, po pravilu, priključuje kao zaseban čvor na magistralu podataka i po potrebi šalju isfiltrirane i konvertovane podatak. Uobičajeno je da se ova merna oprema označava kao "pametna merna oprema".
U svakom računarski upravljanom sistemu prikuplja se veoma veliki broj podataka
Rac_up/12
(stotine, pa i hiljade). Imajući u vidu sve što je rečeno u pogledu obrade ovih podataka, jasno je da se akvizicija podataka realizuje preko namenskih, jednostavnih računarskih sistema (PLC, mikroračunarski sistem ili specijalizovani merni sistem) koji se vezuju na magistralu podataka. Ovi uređaji se često nazivaju i koncentratori podataka. Oni gotovo nikada ne komuniciraju međusobno, već šalju podatke na sledeći nivo gde se vrši njihova obrada u cilju određivanja upravljanja ili nadzora rada celog sistema.
Stanje opreme Računar se može upotrebiti i za praćenje stanja u kome se nalazi procesna
oprema. Na primer, on može obavljati nadzor nad stanjem različitih pumpi, ventila, motora, kompresora, prekidača i druge opreme. Zadatak računara u ovom slučaju je da detektuje i upozori na zabranjene kombinacije položaja ventila, uslova za rad motora i slično. Ova vrsta nadzora može da spreči havarije, ozbiljna oštećenja opreme ili druge vrste materijalnih gubitaka.
Procesni računari imaju značajnu ulogu i u detekciji valjanosti opreme i eventualnom predviđanju budućeg kvara. Tako se, na primer, merenjem protoka i temperature u okolini razmenjivača toplote dobija uvid u stanje površine razmenjivača, a time i u njegovu efikasnost. Isto tako, mogu se pratiti istrošenost mehaničkih komponenti, pregrejavanje kućišta motora ili preterano velike vibracije.
Korišćenje računara za ispitivanje stanja opreme zahteva da se u svakom konkretnom slučaju ustanovi koje veličine i na koji način mogu da ukažu na probleme u funkcionisanju određenog dela opreme. Zatim se razvija programski zadatak koji, na osnovu definisanih relacija, obavlja ispitivanje opreme.
Stanje proizvoda Kvalitet proizvoda se može oceniti na osnovu merenja na samom procesu, na
osnovu laboratorijskih analiza ili, kombinacijom oba postupka. Računar može da primi iz procesa informacije o kvantitetu i kvalitetu proizvoda. Pored toga, mogu se uneti i rezultati laboratorijskih testova. Sve ove informacije on može brzo i efikasno da prosledi inženjeru zad-ženom za kontrolu proizvoda.
Veoma često računar prima neobrađene podatke iz različitih laboratorijskih analitičkih instrumenata kao što su spektrometri, hromatografi i slično. U tom slučaju računar se koristi i kao deo laboratorijske opreme za obradu mernih podataka. Tako na primer, proizvodnja čelika pomoću elektro-lučne peći uključuje izuzetno složene proračune za određivanje odgovarajućeg sastava mešavine sirovine i aditiva. Tokom procesa topljenja uzimaju se uzorci čelika i analiziraju pomoću spektrometra. Po pravilu je ovaj instrument vezan direktno za procesni računar koji analizira rezultat i na osnovu te analize određuje potrebne korekcije u količini aditiva. Najčešće se isti računar koristi i za upravljanje radom lučne peći.
Nekad se osnovna funkcija koju ima računar svodi na izračunavanje vezano za laboratorijsku opremu ili za atestiranje te opreme.
Indirektna merenja Postoji čitav niz promenljivih koje nose bitne informacije o procesu, a koje se ili ne
mogu meriti ili se to iz praktičnih razloga ne radi. Najčešći razlozi koji sprečavaju merenje su: • nepostojanje odgovarajuće merne opreme, • suviše visoka cena mernih instrumenata, • izuzetno nepovoljni uslovi na mestu merenja (visoka temperatura, jake vibracije, prašina
itd.) • promenljiva je izvedena veličina (npr. efikasnost) pa se ne može direktno meriti.
Očigledno je da se jedna važna i nezamenljiva funkcija procesnog računara iskazuje i u određivanju ovakvih nemerljivih veličina na osnovu veličina koje se mogu meriti. Ovaj postupak se naziva indirektno ili izvedeno merenje i za njegovo izvođenje je neophodno da se uspostave relacije između veličine koja se želi odrediti i odgovarajućih
Rac_up/13
mernih veličina. Primeri nemerljivih veličina čije vrednosti izračunava računar su vlažnost drvenih
opiljaka koji se koriste u proizvodnji papira, unutrašnja temperatura čeličnih ingota koji se šalju na valjanje, toplotna vrednost uglja koji se koristi za zagrevanje bojlera ili peći itd. Sve ove veličine se određuju posredno, na osnovu efekta koji imaju na tok procesa, odnosno na kvalitet proizvoda. Sledeću grupu nemerljivih promenljivih čine veličine koje se određuju direktnim preračunavanjem mernih podataka. Na primer, određivanje odnosa protoka pare i tečnosti u destilacionoj koloni, hemijski sastav i koncentracija u multikomponentnoj smeši i slično.
Definisani parametri čine posebnu grupu veličina koje se mogu izračunati pomoću računara, a koje predstavljaju neku vrstu sumarne ocene performanse. Ovde spadaju različiti parametri efikasnosti kao što su potrošnja energije po jedinici proizvoda, koeficijent iskorišćenja, iznos energetskih i materijalnih gubitaka po jedinici proizvoda itd.
Mogućnost dobijanja informacija o nemerljivim veličinama mogla bi da dovede do zaključka da se operator nepotrebno opterećuje novom količinom podataka. Situacija je, međutim, sasvim suprotna. Gotovo sve izvedene veličine predstavljaju neku vrstu sumarne ocene u okviru koje se čitav niz merenja sažima u manju grupu veličina izuzetno značajnih za ocenu stanja na procesu i suštinska su pomoć pri donošenju upravljačkih odluka. Pored toga, sve ove informacije su veoma važne za potpunije razumevanje samog procesa i predstavljaju neophodne podatke koji se koriste pri analizi procesa.
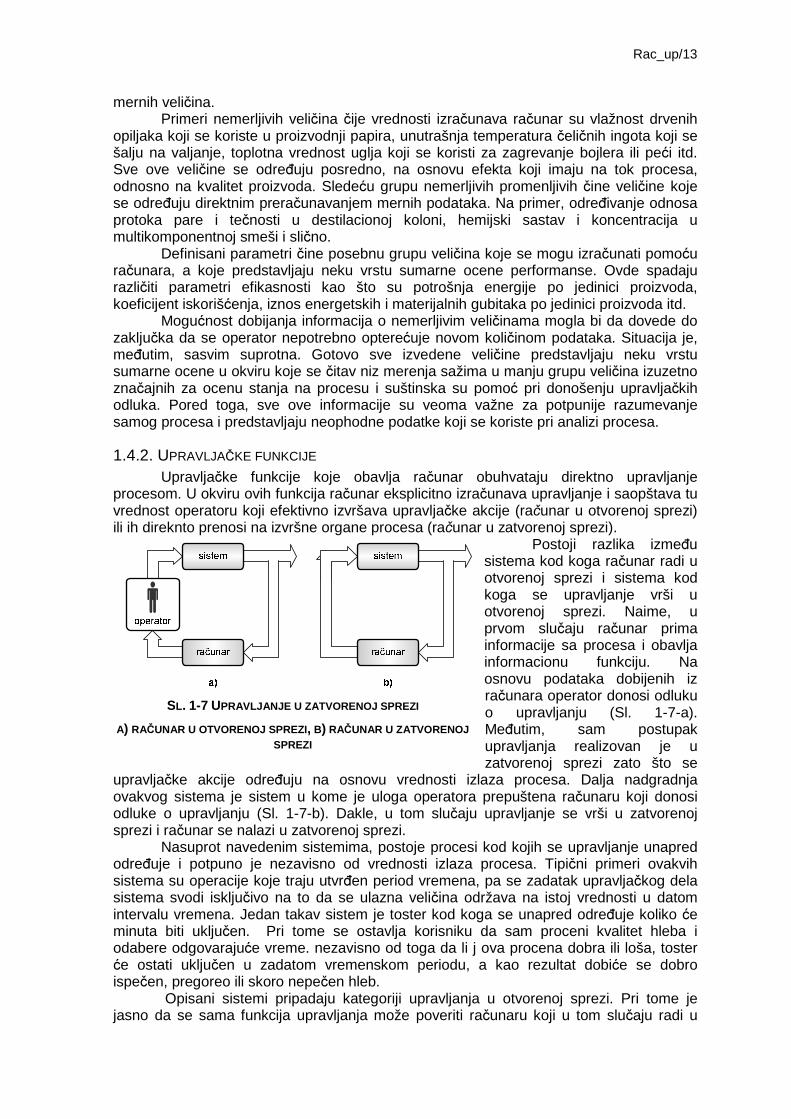
1.4.2. UPRAVLJAČKE FUNKCIJE Upravljačke funkcije koje obavlja računar obuhvataju direktno upravljanje
procesom. U okviru ovih funkcija računar eksplicitno izračunava upravljanje i saopštava tu vrednost operatoru koji efektivno izvršava upravljačke akcije (računar u otvorenoj sprezi) ili ih direknto prenosi na izvršne organe procesa (računar u zatvorenoj sprezi).
Postoji razlika između sistema kod koga računar radi u otvorenoj sprezi i sistema kod koga se upravljanje vrši u otvorenoj sprezi. Naime, u prvom slučaju računar prima informacije sa procesa i obavlja informacionu funkciju. Na osnovu podataka dobijenih iz računara operator donosi odluku o upravljanju (Sl. 1-7-a). Međutim, sam postupak upravljanja realizovan je u zatvorenoj sprezi zato što se
upravljačke akcije određuju na osnovu vrednosti izlaza procesa. Dalja nadgradnja ovakvog sistema je sistem u kome je uloga operatora prepuštena računaru koji donosi odluke o upravljanju (Sl. 1-7-b). Dakle, u tom slučaju upravljanje se vrši u zatvorenoj sprezi i računar se nalazi u zatvorenoj sprezi.
Nasuprot navedenim sistemima, postoje procesi kod kojih se upravljanje unapred određuje i potpuno je nezavisno od vrednosti izlaza procesa. Tipični primeri ovakvih sistema su operacije koje traju utvrđen period vremena, pa se zadatak upravljačkog dela sistema svodi isključivo na to da se ulazna veličina održava na istoj vrednosti u datom intervalu vremena. Jedan takav sistem je toster kod koga se unapred određuje koliko će minuta biti uključen. Pri tome se ostavlja korisniku da sam proceni kvalitet hleba i odabere odgovarajuće vreme. nezavisno od toga da li j ova procena dobra ili loša, toster će ostati uključen u zadatom vremenskom periodu, a kao rezultat dobiće se dobro ispečen, pregoreo ili skoro nepečen hleb.
Opisani sistemi pripadaju kategoriji upravljanja u otvorenoj sprezi. Pri tome je jasno da se sama funkcija upravljanja može poveriti računaru koji u tom slučaju radi u
SL. 1-7 UPRAVLJANJE U ZATVORENOJ SPREZI
A) RAČUNAR U OTVORENOJ SPREZI , B) RAČUNAR U ZATVORENOJ SPREZI
Rac_up/14
otvorenoj sprezi i realizuje upravljanje u otvorenoj sprezi. Očigledno je da se upravljanje u otvorenoj sprezi može primenjivati samo kod
određenih klasa procesa, kod kojih se ne očekuju poremećaji koji bi mogli da zahtevaju promenu upravljačke strategije tokom odvijanja procesa. Pored toga, pošto je sama upravljačka funkcija relativno jednostavna, za njenu realizaciju se najčešće koriste posebne vrste mikroračunarskih sistema kao što su mikrokontroleri, programabilni logički kontroleri ili sistemi za numeričko upravljanje, o čemu će kasnije biti više reči.
Upravljačke funkcije računara dele se u tri osnovne kategorije: • direktno digitalno upravljanje • plansko upravljanje • nadzor nad radom procesa (supervizija)
1.4.3. DIREKTNO-DIGITALNO UPRAVLJANJE Direktno digitalno upravljanje se najčešće odnosi na upravljanje u zatvorenoj
sprezi. Ono se odlikuje direktnim sprezanjem procesa sa računarom u kome se, na osnovu mernih signala, izračunavaju upravljački signali koji se prenose na izvršne organe. U principu osnovni zadaci ovakvih sistema upravljanja su da se obezbedi održavanje nekih veličina na zadatoj konstantnoj referentnoj vrednosti (zadatak regulacije) ili da se obezbedi promena izlaznih veličina u skladu sa promenom zadatih referentnih signala (zadatak praćenja).
Imajući u vidu složenost samih procesa jasno je da i algoritmi upravljanja mogu da budu veoma složeni. U teoriji sistema automatskog upravljanja razvijen je čitav niz metoda koje se kreću od veoma jednostavnih linearnih zakona upravljanja do kompleksnih sistema optimalnog, adaptivnog ili fazi upravljanja. Neupuštajući se za sada u detaljniji prikaz ovih metoda može se samo reči da se u okviru optimalnog upravljanja, algoritam određuje tako što se minimizira ili maksimizira neki unapred definisan kriterijum (minimum potrošnje goriva, maksimalna iskorišćenost materijala, itd.). Adaptivno upravljanje je pristup kod koga se jedan algoritam upravljanja neprekidno menja tako da se adaptira na promenjene uslove rada samog procesa. Konačno, fazi upravljanje je metodologija u okviru koje se sam zadatak upravljanja specificira na poseban način. Umesto klasičnog crno-belog pristupa u kome su postavljeni zahtevi ispunjeni ili nisu ispunjeni, ovde se polazi od ideje da zahtev može biti ispunjen u izvesnom stepenu. Tako se na primer pri definiciji zahteva za rad rashladnog uređaja ne očekuje da on održava temperaturu na tačno definisanoj vrednosti, već se sistem projektuje tako da ostvarena temperatura bude u prihvatljivim granicama, pri čemu se svakoj vrednosti temperature pridružuje stepen (mera) u kojoj se ona može smatrati prihvatljivom.
Raznolikost algoritama upravljanja, a pre svega njihova kompleksnost uslovljava i vrstu računarskog sistema u okviru koga se može realizovati dati algoritam. Za jednostavne zakone upravljanja mogu se koristiti mikrokontroleri ili programabilni logički kontroleri, dok je za složenije algoritme neophodno koristiti veće programabilne kontrolere ili industrijske PC računare.
1.4.4. PLANSKO UPRAVLJANJE Plansko upravljanje obuhvata upravljanje u kome se računar koristi za generisanje
pobudnih signala kojima se realizuje niz unapred određenih operacionih koraka. Svi nizovi operacija se moraju definisati unapred i to tako da se pokrije širok opseg radnih uslova koji se očekuju.
Pojedini operacioni koraci mogu biti uslovljeni protokom vremena ili signalima povratne sprege na osnovu kojih se ustanovljava da li su se stekli uslovi da se jedan korak završi.
Plansko upravljanje obuhvata više posebnih kategorija.
Programsko upravljanje Plansko upravljanje obuhvata prevođenje procesa iz jedne radne tačke u drugu uz
Rac_up/15
minimum utrošene energije i vremena. Najčešće se koristi za puštanje procesa u rad i njegovo zaustavljanje. Naime, prilikom puštanja procesa u rad neophodno je izvršiti dijagnostičke testove kojima se ispituje stanje svih elemenata sistema. Zatim se, ukoliko su svi elementi spremni za rad, pristupa njihovom dovođenju u radno stanje. Pod ovim se podrazumeva na primer zagrevanje ulja u različitim hidrauličnim uređajima, postizanje odgovarajućeg pritiska u pneumatskim uređajima, puštanje motora u rad itd. Tek kada su svi elementi u stanju u kome mogu ispravno da funkcionišu sistem se pušta u rad i generišu se upravljački signali koji po nekoj unapred zadanoj trajektoriji sistem dovode u radnu tačku, nakon čega se zatvara projektovana povratna sprega i kontroleri počinju sa radom. Pri tome, u svim ovim fazama rada sistema mogu da postoje i lokalne pomoćne povratne sprege koje upravljaju radom pojedinih delova sistema. Tako, na primer, vođenje sistema u neku radnu tačku može da se ostvari zadavanjem reference koja definiše željenu trajektoriju, dok odgovarajući podsistemi upravljanja obezbeđuju praćenje te trajektorije. U tom smislu, programsko upravljanje javlja se kao svojevrsna nadgradnja nad direktnim digitalnim upravljanjem.
Sekevencijalno upravljanje Sekvencijalno upravljanje je u suštini veoma slično planskom upravljanju. Razlog
zašto se ono izdvaja kao posebna kategorija leži u činjenici da se radi o specifičnoj vrsti šaržnih procesa koji se odvijaju kroz niz jasno definisanih koraka. U okviru svakog koraka odvija se neka akcija čije je trajanje određeno ili protokom vremena ili nastankom nekog spoljnjeg događaja. To nadalje znači da se aktivnosti u okviru jednog koraka mogu predstaviti pomoću logičke funkcije koja povezuje stanje na procesu sa aktivnošću na ulazu u proces. U skladu sa time može se reči da se sekvencijalno upravljanje sastoji iz logičkog upravljanja koje definiše logičku funkciju i sekvenciranja u okviru koga se na osnovu protoka vremena ili ispunjenosti određenih uslova određuje redosled izvođenja logičkih funkcija.
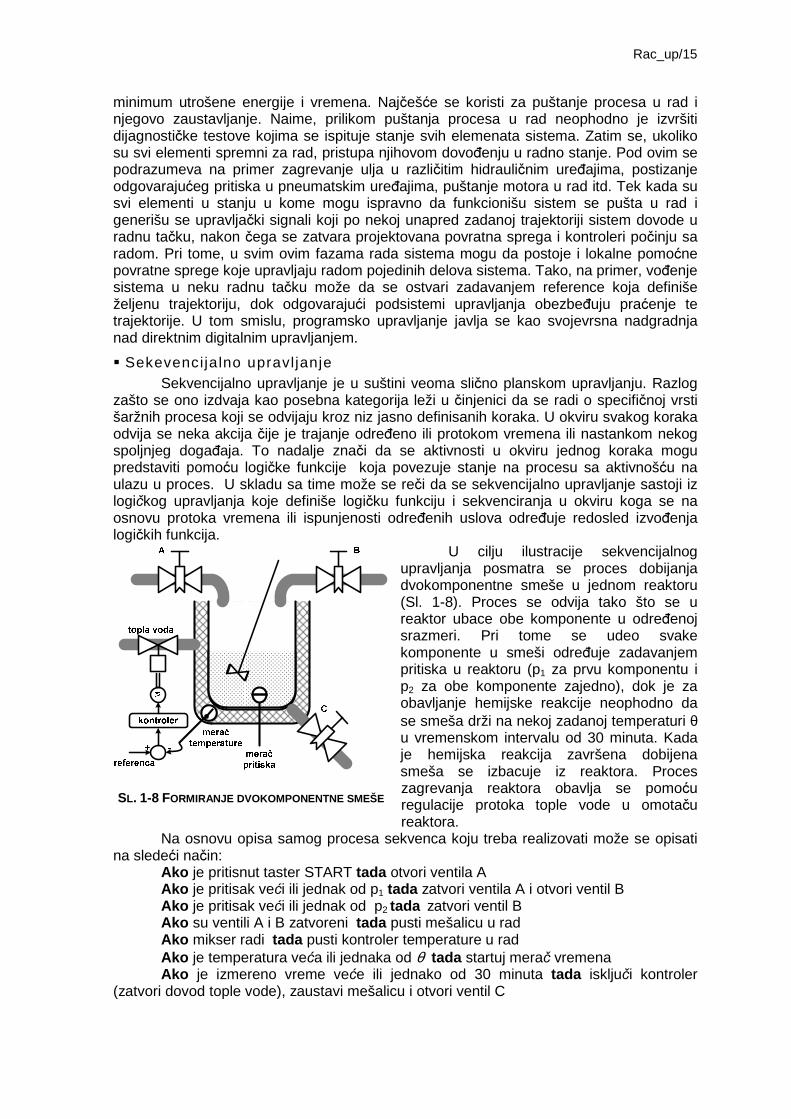
U cilju ilustracije sekvencijalnog upravljanja posmatra se proces dobijanja dvokomponentne smeše u jednom reaktoru (Sl. 1-8). Proces se odvija tako što se u reaktor ubace obe komponente u određenoj srazmeri. Pri tome se udeo svake komponente u smeši određuje zadavanjem pritiska u reaktoru (p1 za prvu komponentu i p2 za obe komponente zajedno), dok je za obavljanje hemijske reakcije neophodno da se smeša drži na nekoj zadanoj temperaturi θ u vremenskom intervalu od 30 minuta. Kada je hemijska reakcija završena dobijena smeša se izbacuje iz reaktora. Proces zagrevanja reaktora obavlja se pomoću regulacije protoka tople vode u omotaču reaktora.
Na osnovu opisa samog procesa sekvenca koju treba realizovati može se opisati na sledeći način:
Ako je pritisnut taster START tada otvori ventila A Ako je pritisak veći ili jednak od p1 tada zatvori ventila A i otvori ventil B Ako je pritisak veći ili jednak od p2 tada zatvori ventil B Ako su ventili A i B zatvoreni tada pusti mešalicu u rad Ako mikser radi tada pusti kontroler temperature u rad Ako je temperatura veća ili jednaka od θ tada startuj merač vremena Ako je izmereno vreme veće ili jednako od 30 minuta tada isključi kontroler
(zatvori dovod tople vode), zaustavi mešalicu i otvori ventil C
SL. 1-8 FORMIRANJE DVOKOMPONENTNE SMEŠE
Rac_up/16
Iz opisanog primera uočava se da je svaki korak sekvence definisan rečenicom (iskazom) oblika
ako (uslov) tada (akcija) što je omogućilo da se razviju posebni programski jezici za realizaciju sekvencijalnog upravljanja, o čemu će kasnije biti više reči. Pored toga, potrebno je uočiti i da pojedini koraci sekvencijalnog upravljanja mogu u sebi da uključe i pokretanje kontrolera za upravljanje u zatvorenoj sprezi. U tom smislu, sekvencijalno upravljanje se takođe javlja kao svojevrsna nadgradnja nad direktno digitalno upravljanje.
Numeričko upravljanje Numeričko upravljanje takođe predstavlja upravljanje koje se definiše nizom
unapred utvrđenih operacija. U osnovi radi se o upravljanjу radom alatnih mašina na osnovu geometrijskih i tehnoloških podataka. Naime, pri obradi nekog predmeta na alatnim mašinama potrebno je definisati relativni položaj između alata i predmeta koji se obrađuje (geometrijski podaci), kao i brzinu rotacionih i translatornih pomeraja, vrstu alata, dovod rashladne tečnosti itd. (tehnološki podaci). Ovi podaci se kodiraju pomoću alfanumeričkih zapisa. Niz takvih zapisa definiše proces kompletne proizvodnje nekog mašinskog elementa. Samo upravljanje realizuje se tako što se alfanumerički zapisi obrađuju i iz njih se određuju referentne vrednosti za servomehanizme koji upravljaju rotacionim i translatornim delovima alatne mašine. Činjenica da se upravljanje generiše na osnovu alfanumerički kodiranih podataka dovela je do toga da se ovo upravljanje označava kao numeričko upravljanje.
Za razliku od drugih tipova upravljanja koji se razvijaju za bilo koji proces, ovde se radi o upravljanju koje je namenjeno isključivo za jednu posebnu vrstu mašina. Otuda su za realizaciju numeričkog upravljanja prvobitno bili razvijeni posebni uređaji. Tek kasnije, u realizaciji upravljanja uključeni su i računari, ali se ipak, ovaj tip upravljanja izdvojio u zasebnu oblast koja se izučava i razvija nezavisno od drugih tipova upravljanja.
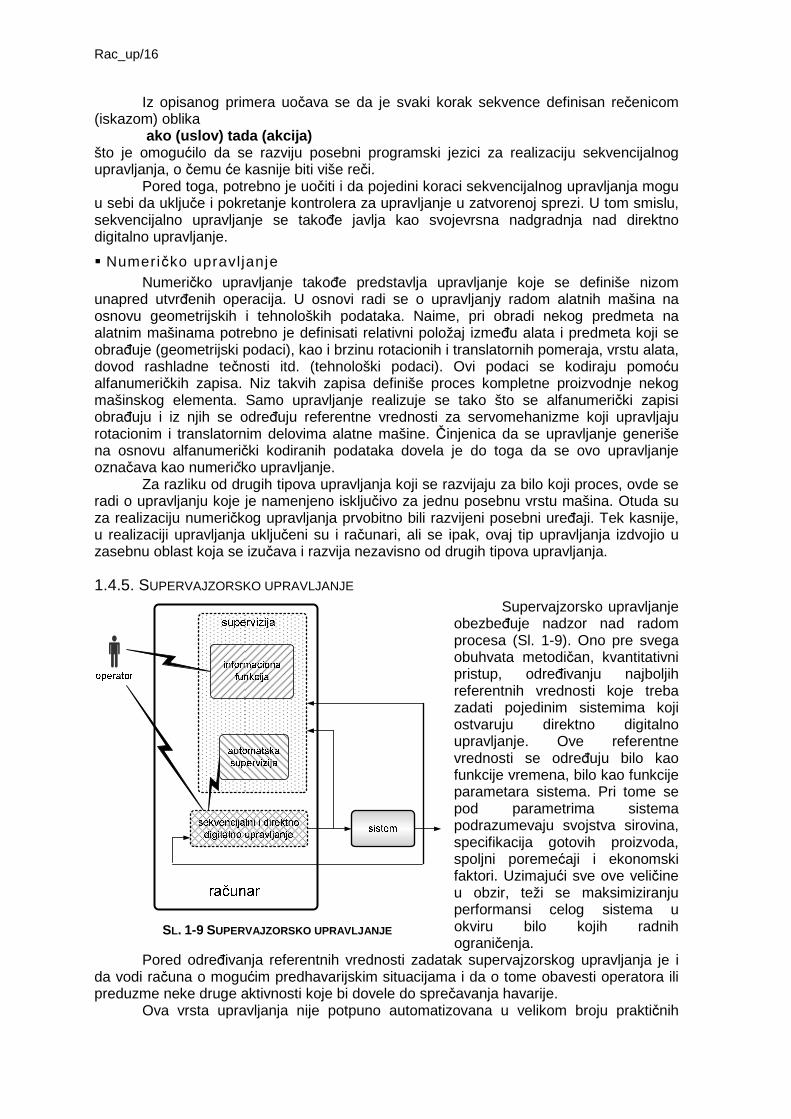
1.4.5. SUPERVAJZORSKO UPRAVLJANJE Supervajzorsko upravljanje
obezbeđuje nadzor nad radom procesa (Sl. 1-9). Ono pre svega obuhvata metodičan, kvantitativni pristup, određivanju najboljih referentnih vrednosti koje treba zadati pojedinim sistemima koji ostvaruju direktno digitalno upravljanje. Ove referentne vrednosti se određuju bilo kao funkcije vremena, bilo kao funkcije parametara sistema. Pri tome se pod parametrima sistema podrazumevaju svojstva sirovina, specifikacija gotovih proizvoda, spoljni poremećaji i ekonomski faktori. Uzimajući sve ove veličine u obzir, teži se maksimiziranju performansi celog sistema u okviru bilo kojih radnih ograničenja.
Pored određivanja referentnih vrednosti zadatak supervajzorskog upravljanja je i da vodi računa o mogućim predhavarijskim situacijama i da o tome obavesti operatora ili preduzme neke druge aktivnosti koje bi dovele do sprečavanja havarije.
Ova vrsta upravljanja nije potpuno automatizovana u velikom broju praktičnih
SL. 1-9 SUPERVAJZORSKO UPRAVLJANJE
primena.Naime, računar koji obavlja nadzor radi u otvorenoj sprezi. To zapravo znaon obavlja informacionu funkciju i na osnovu nekog unapred definisanog postupka predlaže operatoru niz upravljačprepuštena je operatoru. Osnovni razlozi koji uslovljavaju ovakva rešenja leže u izsloženosti sistema i nemogućposlednje vreme ulažu se napori da se na ovom nivou primene rezultati teorije ekspertskih sistema, neuronskih mreža i fazi upravljanja. To zapravo značalgoritama za donošenje odluka koji bi mogli da u velikoj meri emuliraju sposobnosti operatora.
Kod jednostavnijih sistema nadzor je potpuno automatizovan. To zapravo značračunar radi u zatvorenoj sprezi. Nema nikakve sumnje da postoji deo funkcija nadzora automatizuje i prepusti račposvećuje teoriji odlučivanja, kao i razvoju ekspertskih sistema i sistema za prepoznavanje oblika. Buduć ć ćpotpunosti zamene ljudska ć đ
1.5. HIJERAHIJSKO UPRAVLJA
Računar može obavljati samo informacionu funkciju. U tom slučnadgledanju procesa pomoć č ćupravljački sistem kod koga operator obavlja upravljačinformacije i preporuke koje daje rač čkojih je odluka o upravljačkim akcijama u da se kod složenih sistema rač đčemu on istovremeno obavlja upravljanje u zatvorenoj sprezi, kao i sekvencijalno i supervajzorsko upravljanje.
Nadalje se računarske funkcije mogu proširiti i na mrežu koju čjedinica. Na taj način dobija se moguć čsistemom. Naglasimo da je malo sistema izgrađpovezanih elemenata. Realna situacija je upravo obrnuta. U većsreće se izuzetno mnogo zatvorenih upravljačkompleksa ovaj broj se penje i do hiljadu. Neke analize pokazuju da oko jedne trećproizvodnih postrojenja u SADnisu vezane za upravljanje jednim istim procesom, ipak izmeđse mora uzeti u obzir prilikom upravljanja.
Sve do sada nabrojane aktivnosti spadaju u omogućava osnovno funkcionisanje proizvodnog sistema. Samo se po sebi razume da ćkvalitet obavljanja ovih zadataka zavisiti od raspoloživosti sirovina i rezervnih delova,
SL. 1-10 LOGIČ
čunar koji obavlja nadzor radi u otvorenoj sprezi. To zapravo znaon obavlja informacionu funkciju i na osnovu nekog unapred definisanog postupka predlaže operatoru niz upravljačkih akcija koje bi trebalo zadati sistemu. Sama odluka prepuštena je operatoru. Osnovni razlozi koji uslovljavaju ovakva rešenja leže u izsloženosti sistema i nemogućnosti da se svi relevantni faktori unesu u algoritam. U poslednje vreme ulažu se napori da se na ovom nivou primene rezultati teorije ekspertskih sistema, neuronskih mreža i fazi upravljanja. To zapravo znači da se težialgoritama za donošenje odluka koji bi mogli da u velikoj meri emuliraju sposobnosti
Kod jednostavnijih sistema nadzor je potpuno automatizovan. To zapravo značčunar radi u zatvorenoj sprezi. Nema nikakve sumnje da postoji težnja da se sve već
deo funkcija nadzora automatizuje i prepusti računaru. U tom smislu velika pažnja se ć čivanja, kao i razvoju ekspertskih sistema i sistema za
prepoznavanje oblika. Budućnost će pokazati u kojoj meri će ovakvi sistpotpunosti zamene ljudska ćula i ljudsku sposobnost rasuđivanja.
IJERAHIJSKO UPRAVLJA NJE PROCESIMA POMOĆU RAČUNARA čunar može obavljati samo informacionu funkciju. U tom sluč
pomoću računara. Sledeći korak je operatorski vođ č
kod koga operator obavlja upravljačku funkciju. U svom radu on koristi informacije i preporuke koje daje računar. Krajnji stepen automatizacije č
čkim akcijama u potpunosti prepuštena računaru. Č čda se kod složenih sistema računar nađe u svim prethodno navedenim funkcijama, pri čemu on istovremeno obavlja upravljanje u zatvorenoj sprezi, kao i sekvencijalno i supervajzorsko upravljanje.
unarske funkcije mogu proširiti i na mrežu koju ččin dobija se mogućnost za računarsko upravljanje celim proizvodnim
sistemom. Naglasimo da je malo sistema izgrađenih od malog broja relativno jednostavno enata. Realna situacija je upravo obrnuta. U većini proizvodnih sistema
će se izuzetno mnogo zatvorenih upravljačkih petlji. Kod rafinerija i drugih hemijskih kompleksa ovaj broj se penje i do hiljadu. Neke analize pokazuju da oko jedne treć
jenja u SAD-u imaju između 100 i 1000 zatvorenih petlji. Iako sve one nisu vezane za upravljanje jednim istim procesom, ipak između njih postoji interakcija koja se mora uzeti u obzir prilikom upravljanja.
Sve do sada nabrojane aktivnosti spadaju u operativne zadatkećava osnovno funkcionisanje proizvodnog sistema. Samo se po sebi razume da ć
adataka zavisiti od raspoloživosti sirovina i rezervnih delova,
OGIČKI NIVOI AKTIVNO STI U PROIZVODNOM SISTEMU
Rac_up/17
čunar koji obavlja nadzor radi u otvorenoj sprezi. To zapravo znači da on obavlja informacionu funkciju i na osnovu nekog unapred definisanog postupka
čkih akcija koje bi trebalo zadati sistemu. Sama odluka prepuštena je operatoru. Osnovni razlozi koji uslovljavaju ovakva rešenja leže u izuzetnoj
ćnosti da se svi relevantni faktori unesu u algoritam. U poslednje vreme ulažu se napori da se na ovom nivou primene rezultati teorije ekspertskih
či da se teži projektovanju algoritama za donošenje odluka koji bi mogli da u velikoj meri emuliraju sposobnosti
Kod jednostavnijih sistema nadzor je potpuno automatizovan. To zapravo znači da težnja da se sve veći
čunaru. U tom smislu velika pažnja se ć čivanja, kao i razvoju ekspertskih sistema i sistema za
ć ć će ovakvi sistemi noći da u
čunar može obavljati samo informacionu funkciju. U tom slučaju govori se o operatorski vođen računarski
čku funkciju. U svom radu on koristi čunar. Krajnji stepen automatizacije čine sistemi kod
čunaru. Čest je slučaj č đe u svim prethodno navedenim funkcijama, pri
čemu on istovremeno obavlja upravljanje u zatvorenoj sprezi, kao i sekvencijalno i
unarske funkcije mogu proširiti i na mrežu koju čini više procesnih č ć čunarsko upravljanje celim proizvodnim
đenih od malog broja relativno jednostavno ćini proizvodnih sistema
ć čkih petlji. Kod rafinerija i drugih hemijskih kompleksa ovaj broj se penje i do hiljadu. Neke analize pokazuju da oko jedne trećine svih
đu 100 i 1000 zatvorenih petlji. Iako sve one đu njih postoji interakcija koja
operativne zadatke čije izvršavanje ćava osnovno funkcionisanje proizvodnog sistema. Samo se po sebi razume da će
adataka zavisiti od raspoloživosti sirovina i rezervnih delova,
Rac_up/18
koordinacije uzajamno povezanih pogona i čitavog niza drugih stvari. To zapravo znači da je za uspešno poslovanje, na logički višem nivou neophodno da se obavi niz taktičkih zadataka, kao što su o koordinacija poruđbina sa planom proizvodnje i transportnim mogućnostima; o upravljanje svakim pogonom, kao i koordinacija potražnje sirovina od strane pojedinih
pogona; o upravljanje stanjem sirovina i gotovih proizvoda u skladištima; o blagovremeno snabdevanje sirovinama; o opravke i preventivno održavanje opreme; o rukovođenje osobljem koje radi u pogonima;
Konačno, da bi proizvodni sistem mogao uspešno da se razvija neophodno je da
se na osnovu procene stanja na tržištu, raspoloživih resursa i potencijalnih investicija formira strategija razvoja novih proizvoda (Sl. 1-10)
Za potrebe realizacije taktičkih i strateških aktivnosti tradicionalno je razvijan poslovni informacioni sistem. Imajući u vidu da su sve aktivnosti u većoj ili manjoj meri povezane prirodna je težnja da se one obuhvate. Otuda se u savremenim sistemima sve češće sreće poslovni informaciono upravljački sistem. Samo se po sebi razume da ostvarenje svih ovih zahteva dovodi do izuzetne složenosti celokupnog sistema. Verovatno je najozbiljniji problem činjenica da postoji toliko mnogo stvari kojima treba upravljati i to brzo i efikasno. Uz to dolaze problemi ograničenih resursa (sirovina, energije, kapaciteta pogona itd.), kao i pouzdanosti opreme. U jednom procesu koji se odvija u više faza otkazivanje opreme u jednoj fazi može proizvesti efekat "srušenih domina" i praktično dovesti do raspada celog sistema. Sledeće ograničenje je raspoloživo vreme u kome treba izvršiti pojedine operacije i koje je ograničeno tehničkim karakteristikama pojedinih uređaja. Jednom rečju, zahtevi u pogledu efikasnosti, tačnosti i vremenske ograničenosti mogu komplikovati problem do krajnjih granica, pa čak i dovesti u pitanje njegovu rešivost. Radi se, zapravo, o tome da su neke stvari previše složene i prevazilaze našu sposobnost praćenja bilo da tome pristupa pojedinac, bilo da se radi o čitavom timu. Postoji previše aspekata, previše interakcija koje se prebrzo odvijaju, prevelika akumulacija podataka koje bi trebalo prihvatiti, obraditi i doneti odgovarajuće optimalne odluke.
Problem kompleksnosti prisutan je u ljudskom društvu veoma dugo. Mnogo pre nego što je razvijena savremena industrija i proizvodni sistemi, ljudi su se sretali sa problemom upravljanja složenim sistemima. Zapravo, onog časa kada je ljudska zajednica prevazišla okvire jednog sela, javio se problem organizacije upravljanja tom novostvorenom zajednicom – državom, koja je trebalo da ostvaruje koordinirane akcije na dobrobit svih stanovnika. Još u starim civilizacijama taj problem je rešavan tako što su predstavnici centralne vlasti bili raspoređeni po selima gde su rukovodili njihovim aktivnostima. Jednu od osnovnih prepreka predstavljao je problem komunikacije radi usaglašavanja aktivnosti. U tom smislu smatra se da je razvoj pisma i formiranje odgovarajućih zakonika bio značajan korak napred u celoj organizaciji, jer je time omogućeno da se sve odluke i sva pravila distribuiraju uniformno po celoj zemlji.
Osnovni princip organizacije starih civilizacija zadržan je i do naših dana. Kao prvo, vrši se podela dužnosti. Ona je veoma često geografska, tako da se sreću, na primer, savezni, republički, regionalni i opštinski organi uprave. Deoba se isto tako može sprovesti i po vrsti poslova, kao što su obrazovanje, trgovina, zdravstvo, istraživanje itd. Kada se obavi podela, formira se ekipa koja je zadužena da upravlja svakim pojedinim delom. Ova ekipa radi u skladu sa propisima i načelima koje dobija od istorodne organizacije na višem nivou (opština od regiona, ovaj od republike itd.). Sa svoje strane, ova ekipa razrađuje dobijene naloge, prilagođava ih specifičnim uslovima koji vladaju u datom okruženju i predaje ih onim delovima koji se nalaze u njenoj nadležnosti.
Rac_up/19
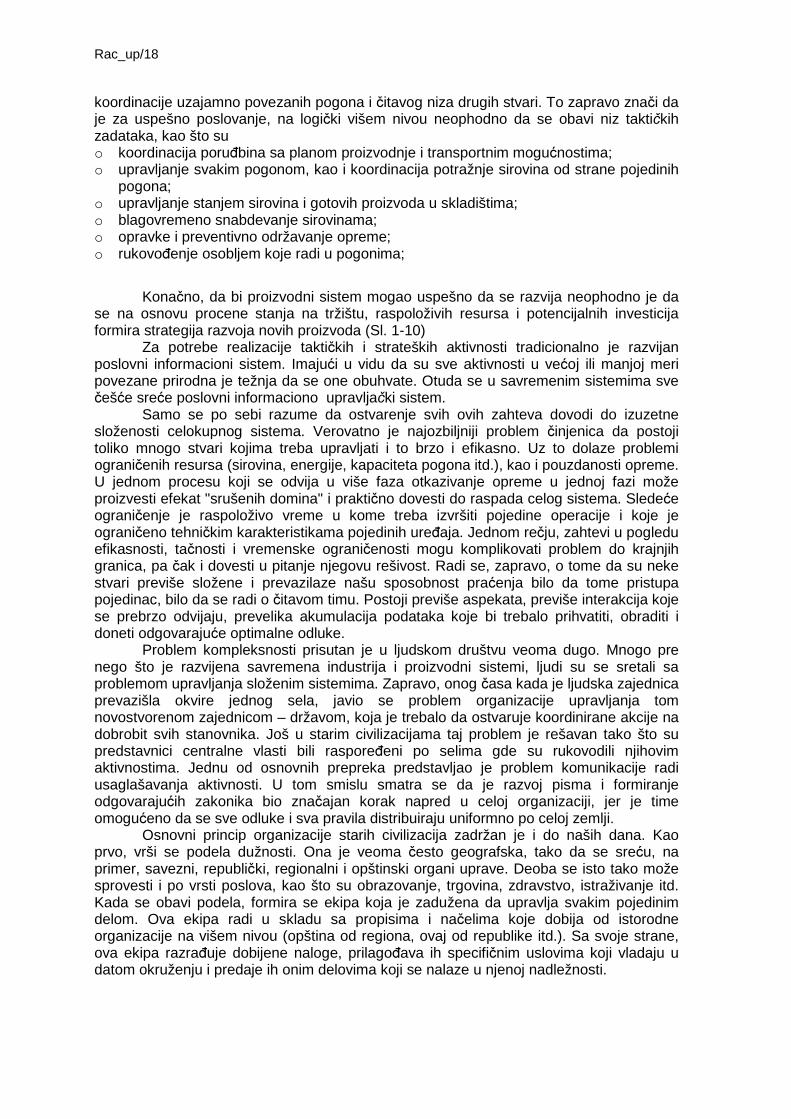
Uzimajući u obzir stečena iskustva u oblasti upravljanja društvenom zajednicom, prirodno je da se i proizvodni procesi organizuju na istim osnovama. I ovde se prvo vrši podela posla identifikovanjem celina koje mogu relativno nezavisno da operišu. Za svaku od ovih celina projektuje se poseban upravljački sistem koji radi na osnovu referentnih vrednosti i ograničenja ("uputstva i načela"), koje dobija od nadređenih sistema obrađujući pri tome informacije dobijene merenjem na pridruženom području. Sa nastankom industrijske revolucije i razvojem velikih proizvodnih sistema došlo se do organizacije koja bi se mogla opisati na sledeći način.
U jednom pogonu nizom uređaja i mašina upravljanje se ostvaruje uz pomoć zatvorenih povratnih sprega. Merenja izlaza i stanja pojedinih upravljačkih petlji prikazuju se u centralnoj operatorskoj prostoriji u kojoj postoje i uređaji za promenu parametara i referentnih vrednosti. Svaki pogon, u zavisnosti od složenosti ima jednog ili više operatora. Izveštaji o radu pojedinih pogona šalju se poslovođi celog sistema ili grupi poslovođa, ako je sistem toliko složen da svaki od poslovođa prati samo jedan njegov
aspekt. Na osnovu ovih izveštaja poslovođa daje uputstva operatorima za budući rad i koordinira rad svih pogona. Deo informacija koje primaju poslovođe prosleđuje se rukovodiocu proizvodnje koji ih obrađuje. Na osnovu rezultata obrade, kao i drugih podataka, rukovodilac kreira proizvodnu strategiju i izdaje odgovarajuća uputstva poslovođama. Konačno informacije o proizvodnji, koja predstavlja samo jedan od poslovnih funkcija, kombinuju se sa svim ostalim podacima koji se prikupljaju u okviru ostalih poslovnih funkcija kao što su nabavka, skladište, transport, finansije itd. i na osnovu toga se formira globalna poslovna politika. Dakle, ceo sistem organizovan je kao država u malom i podeljen u hijerarhijske upravljačke nivoe.
Podela upravljanja na hijerarhijske nivoe nije jednoznačna u smislu da se svaki nivo, u zavisnosti od čitavog niza okolnosti, može deliti na više podnivoa. U funkcionalnom smislu uočavaju se logičke celine prikazane na (Sl. 1-11).
Najniži, prvi nivo obuhvata širok spektar zadataka kao što su prikupljanje mernih podataka, zatim lokalne, jednostavne upravljačke petlje, sekvencijalno upravljanje, alarmiranje i autodijagnostikovanje otkaza.
Na sledeće, višem nivou obavljaju se nadzor i komunikacija sa operatorom. U okviru nadzora određuju se referentne vrednosti za niži nivo, ali i koordinacija nad delom sistema sa nižeg nivoa, kao i reakcija na alarmne situacije. Pored toga, na ovom nivou se određuje redosled izvođenja operacija na nižem nivou.
Treći nivo obuhvata pripremu izveštaja o proizvodnji u delu sistema nad kojim se vrši nadzor i o podacima vezanim za osnovne elemente proizvodnje (potrošnja materijala, energije itd.). Na ovom nivou vrši se i analiza performansi pojedinih delova sistema. Na osnovu dobijenih rezultata obavlja se planiranje proizvodnje, predviđaju transportne
SL. 1-11 HIJERARHIJSKI NIVOI UPRAVLJANJA
Rukovodilac
proizvodnje
Poslovodja
Operator
Planiranje proizvodnje,
koordinacija
Analiza performanse
izveštaji koordinacija
Nadzor, referentne
vrednosti za DDC
Zatvorene petlje, alarmi,
sekvencijalno upravljanje
Prijem mernih
signala
Zadavanje komandi
izvršnim organima
proces
Nivo 1
Nivo 2
Nivo 3
Nivo 4
Komuni kac ij a
Komuni kac ij a
Poslovodstvo Poslovne funkcije
Nivo 5
Komuni kac ij a
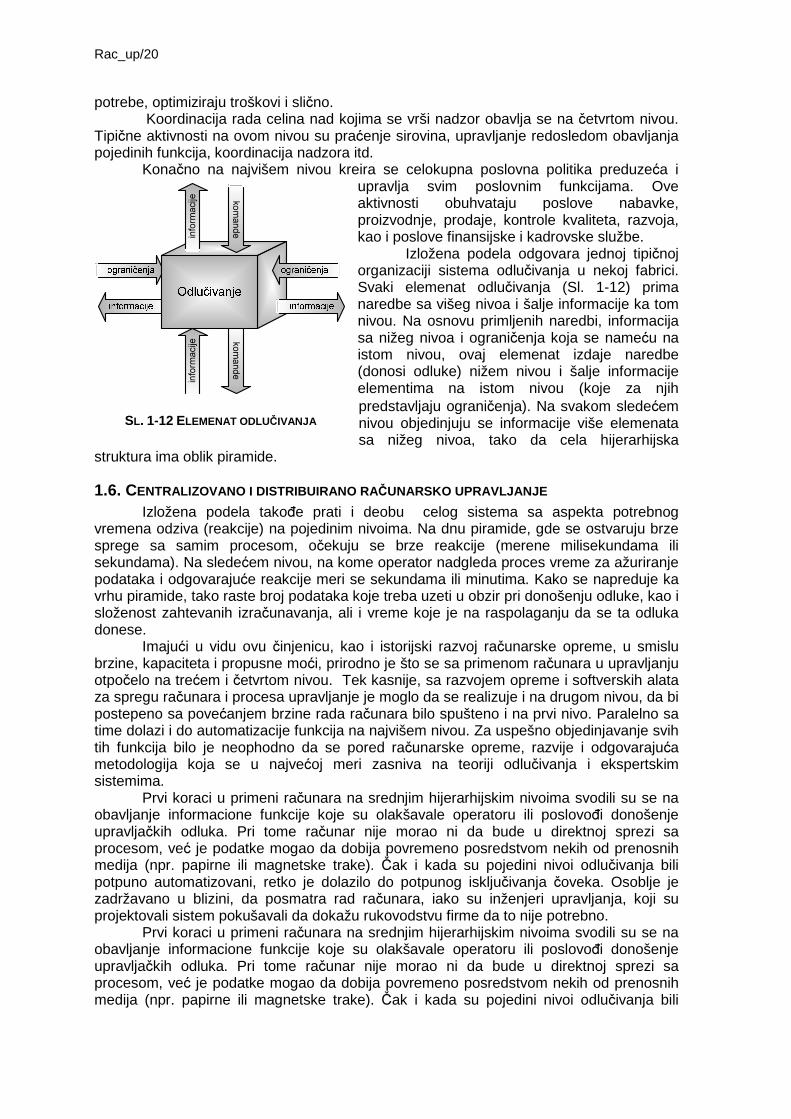
Rac_up/20
potrebe, optimiziraju troškovi i slično. Koordinacija rada celina nad kojima se vrši nadzor obavlja se na četvrtom nivou.
Tipične aktivnosti na ovom nivou su praćenje sirovina, upravljanje redosledom obavljanja pojedinih funkcija, koordinacija nadzora itd.
Konačno na najvišem nivou kreira se celokupna poslovna politika preduzeća i upravlja svim poslovnim funkcijama. Ove aktivnosti obuhvataju poslove nabavke, proizvodnje, prodaje, kontrole kvaliteta, razvoja, kao i poslove finansijske i kadrovske službe.
Izložena podela odgovara jednoj tipičnoj organizaciji sistema odlučivanja u nekoj fabrici. Svaki elemenat odlučivanja (Sl. 1-12) prima naredbe sa višeg nivoa i šalje informacije ka tom nivou. Na osnovu primljenih naredbi, informacija sa nižeg nivoa i ograničenja koja se nameću na istom nivou, ovaj elemenat izdaje naredbe (donosi odluke) nižem nivou i šalje informacije elementima na istom nivou (koje za njih predstavljaju ograničenja). Na svakom sledećem nivou objedinjuju se informacije više elemenata sa nižeg nivoa, tako da cela hijerarhijska
struktura ima oblik piramide.
1.6. CENTRALIZOVANO I DISTRIBUIRANO RA ČUNARSKO UPRAVLJANJE Izložena podela takođe prati i deobu celog sistema sa aspekta potrebnog
vremena odziva (reakcije) na pojedinim nivoima. Na dnu piramide, gde se ostvaruju brze sprege sa samim procesom, očekuju se brze reakcije (merene milisekundama ili sekundama). Na sledećem nivou, na kome operator nadgleda proces vreme za ažuriranje podataka i odgovarajuće reakcije meri se sekundama ili minutima. Kako se napreduje ka vrhu piramide, tako raste broj podataka koje treba uzeti u obzir pri donošenju odluke, kao i složenost zahtevanih izračunavanja, ali i vreme koje je na raspolaganju da se ta odluka donese.
Imajući u vidu ovu činjenicu, kao i istorijski razvoj računarske opreme, u smislu brzine, kapaciteta i propusne moći, prirodno je što se sa primenom računara u upravljanju otpočelo na trećem i četvrtom nivou. Tek kasnije, sa razvojem opreme i softverskih alata za spregu računara i procesa upravljanje je moglo da se realizuje i na drugom nivou, da bi postepeno sa povećanjem brzine rada računara bilo spušteno i na prvi nivo. Paralelno sa time dolazi i do automatizacije funkcija na najvišem nivou. Za uspešno objedinjavanje svih tih funkcija bilo je neophodno da se pored računarske opreme, razvije i odgovarajuća metodologija koja se u najvećoj meri zasniva na teoriji odlučivanja i ekspertskim sistemima.
Prvi koraci u primeni računara na srednjim hijerarhijskim nivoima svodili su se na obavljanje informacione funkcije koje su olakšavale operatoru ili poslovođi donošenje upravljačkih odluka. Pri tome računar nije morao ni da bude u direktnoj sprezi sa procesom, već je podatke mogao da dobija povremeno posredstvom nekih od prenosnih medija (npr. papirne ili magnetske trake). Čak i kada su pojedini nivoi odlučivanja bili potpuno automatizovani, retko je dolazilo do potpunog isključivanja čoveka. Osoblje je zadržavano u blizini, da posmatra rad računara, iako su inženjeri upravljanja, koji su projektovali sistem pokušavali da dokažu rukovodstvu firme da to nije potrebno.
Prvi koraci u primeni računara na srednjim hijerarhijskim nivoima svodili su se na obavljanje informacione funkcije koje su olakšavale operatoru ili poslovođi donošenje upravljačkih odluka. Pri tome računar nije morao ni da bude u direktnoj sprezi sa procesom, već je podatke mogao da dobija povremeno posredstvom nekih od prenosnih medija (npr. papirne ili magnetske trake). Čak i kada su pojedini nivoi odlučivanja bili
SL. 1-12 ELEMENAT ODLUČIVANJA
komande
inform
acije
inform
acije k
omande
Rac_up/21
potpuno automatizovani, retko je dolazilo do potpunog isključivanja čoveka. Osoblje je zadržavano u blizini, da posmatra rad računara, iako su inženjeri upravljanja, koji su projektovali sistem pokušavali da dokažu rukovodstvu firme da to nije potrebno.
Sa povećanjem brzine i kapaciteta računara proširivala se i njegova primena na upravljanje procesom, tako da se postepeno došlo do centralizovanog računarskog upravljanja kod koga je računar obavljao onoliko različitih upravljačkih aktivnosti koliko su to dozvoljavale njegove tehničke karakteristike (Sl. 1-13).
Upotreba centralizovanih računarskih sistema pojednostavljuje i olakšava čitav niz poslova vezanih za upravljanje proizvodnjom. Međutim, njihova primena je otvorila potpuno novo područje problema. Tako razvoj softvera za centralni računar zahteva koordinaciju aktivnosti više programera od kojih svaki radi na određenom aspektu programa. Pored toga javlja se potreba za posebnom vrstom operativnog sistema koji treba da obezbedi ravnomernu podelu memorije i pristup procesoru između podsistema, istovremeno vodeći
računa o postojećim prioritetima. Realizacija upravljačkog projekta zahteva da se manje – više svi glavni delovi sistema razvijaju paralelno. Pošto su mnogi od ovih delova međusobno povezani, greške u projektovanju ili u programiranju prenose se na ceo sistem i veoma teško se otkrivaju. Zbog toga treba da se razvije poseban postupak koji bi omogućio testiranju rada ovakvih sistema pre nego što se pristupi njihovom praktičnom korišćenju. Konačno, čak i kada bi ceo projekat bio uspešno okončan, otkaz samo jedne komponente u sistemu može da dovede do prekida rada računara, a time i do zastoja u proizvodnji.
Sledeći analogiju sa organizacijom ljudskog društva, moglo bi se reći da je ideja o upravljanju celim proizvodnim procesom jednim računarom velike procesorske moći analogna totalitarnom društvu u kome je vlast poverena samo jednom čoveku. Mnogi autori navode da je korišćenje centralnih računarskih sistema inženjere i rukovodioce dovodilo do očajanja. Otuda nije ni čudo što su računari veoma sporo prodirali na ovo područje.
Jedan od uspešnih načina da se reše složeni problemi zasniva se na njihovoj deobi na više problema manje složenosti, koji se mogu zasebno rešavati. U analogiji sa organizacijom vlasti to bi odgovaralo formiranju različitih ministarstava kojima je povereno odlučivanje u određenim područjima. Kod proizvodnih procesa ovaj pristup pretpostavlja korišćenje većeg broja mikroračunara, tako da svaki od njih obavlja po jedan ili više jednostavnijih upravljačkih zadataka. na taj način se došlo do distribuiranih upravljačkih sistema.
Razvoj i primena distribuiranog upravljanja omogućeni su tek sa pojavom mikroračunara, čija je niska cena dovela do toga da je celokupni distribuirani računarski upravljan sistem postao ekonomski isplativiji od centralizovanog. Pri tome, ovde treba imati na umu da se pri određivanju cene projektovanja i realizacije sistema, pored same računarske i prateće opreme, uračunava i ljudski rad koji se ulaže u realizaciju odgovarajućeg softvera.
SL. 1-13 CENTRALIZOVANO RAČUNARSKO UPRAVLJANJE
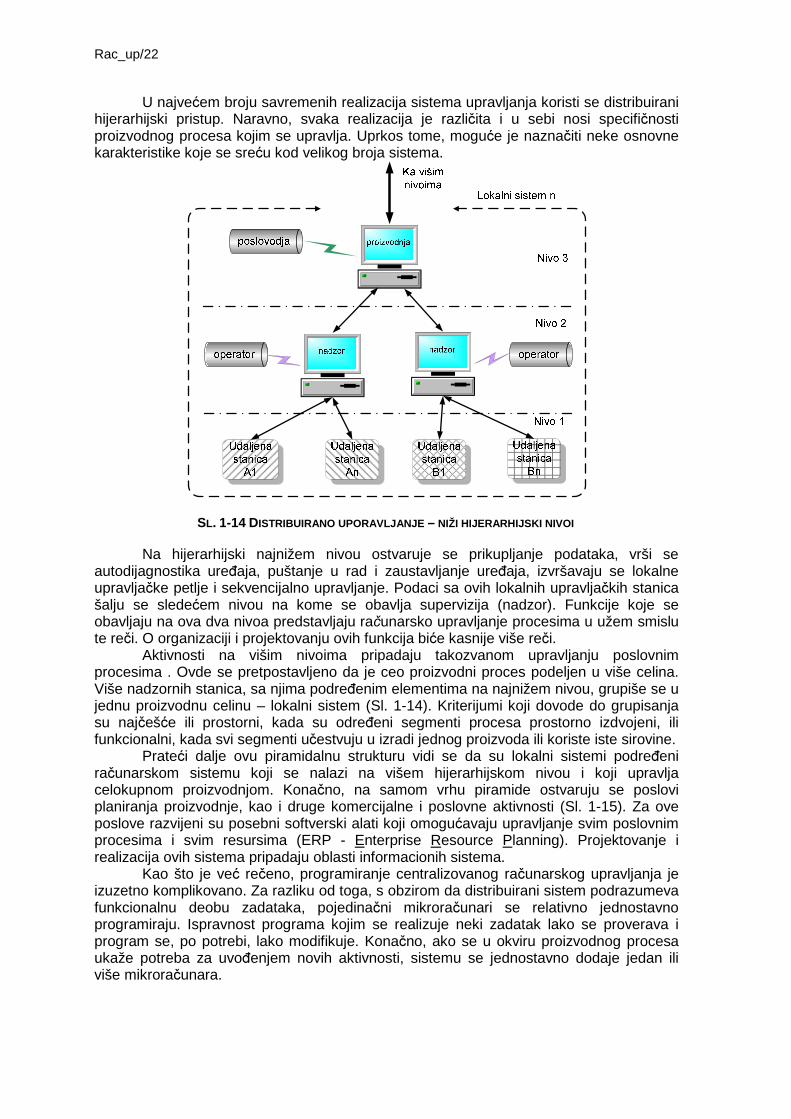
Rac_up/22
U najvećem broju savremenih realizacija sistema upravljanja koristi se distribuirani hijerarhijski pristup. Naravno, svaka realizacija je različita i u sebi nosi specifičnosti proizvodnog procesa kojim se upravlja. Uprkos tome, moguće je naznačiti neke osnovne karakteristike koje se sreću kod velikog broja sistema.
Na hijerarhijski najnižem nivou ostvaruje se prikupljanje podataka, vrši se autodijagnostika uređaja, puštanje u rad i zaustavljanje uređaja, izvršavaju se lokalne upravljačke petlje i sekvencijalno upravljanje. Podaci sa ovih lokalnih upravljačkih stanica šalju se sledećem nivou na kome se obavlja supervizija (nadzor). Funkcije koje se obavljaju na ova dva nivoa predstavljaju računarsko upravljanje procesima u užem smislu te reči. O organizaciji i projektovanju ovih funkcija biće kasnije više reči.
Aktivnosti na višim nivoima pripadaju takozvanom upravljanju poslovnim procesima . Ovde se pretpostavljeno da je ceo proizvodni proces podeljen u više celina. Više nadzornih stanica, sa njima podređenim elementima na najnižem nivou, grupiše se u jednu proizvodnu celinu – lokalni sistem (Sl. 1-14). Kriterijumi koji dovode do grupisanja su najčešće ili prostorni, kada su određeni segmenti procesa prostorno izdvojeni, ili funkcionalni, kada svi segmenti učestvuju u izradi jednog proizvoda ili koriste iste sirovine.
Prateći dalje ovu piramidalnu strukturu vidi se da su lokalni sistemi podređeni računarskom sistemu koji se nalazi na višem hijerarhijskom nivou i koji upravlja celokupnom proizvodnjom. Konačno, na samom vrhu piramide ostvaruju se poslovi planiranja proizvodnje, kao i druge komercijalne i poslovne aktivnosti (Sl. 1-15). Za ove poslove razvijeni su posebni softverski alati koji omogućavaju upravljanje svim poslovnim procesima i svim resursima (ERP - Enterprise Resource Planning). Projektovanje i realizacija ovih sistema pripadaju oblasti informacionih sistema.
Kao što je već rečeno, programiranje centralizovanog računarskog upravljanja je izuzetno komplikovano. Za razliku od toga, s obzirom da distribuirani sistem podrazumeva funkcionalnu deobu zadataka, pojedinačni mikroračunari se relativno jednostavno programiraju. Ispravnost programa kojim se realizuje neki zadatak lako se proverava i program se, po potrebi, lako modifikuje. Konačno, ako se u okviru proizvodnog procesa ukaže potreba za uvođenjem novih aktivnosti, sistemu se jednostavno dodaje jedan ili više mikroračunara.
SL. 1-14 DISTRIBUIRANO UPORAVLJANJE – NIŽI HIJERARHIJSKI NIVOI
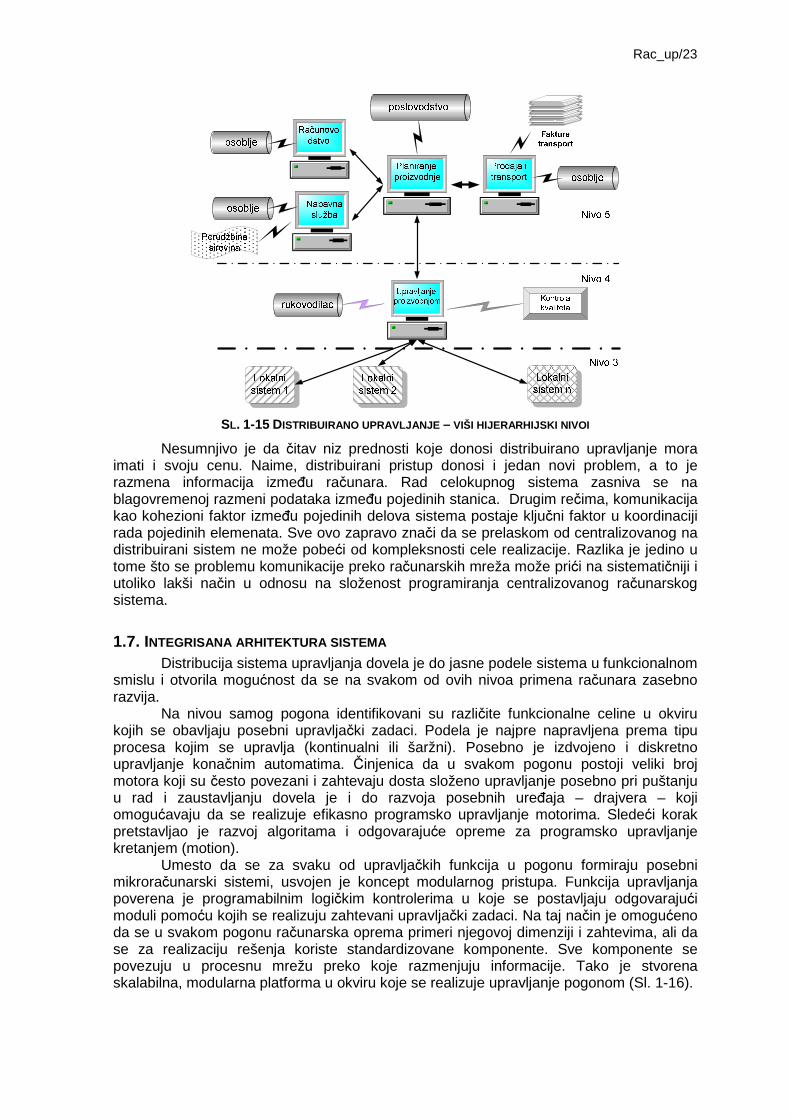
Rac_up/23
SL. 1-15 DISTRIBUIRANO UPRAVLJANJE – VIŠI HIJERARHIJSKI NIVOI
Nesumnjivo je da čitav niz prednosti koje donosi distribuirano upravljanje mora imati i svoju cenu. Naime, distribuirani pristup donosi i jedan novi problem, a to je razmena informacija između računara. Rad celokupnog sistema zasniva se na blagovremenoj razmeni podataka između pojedinih stanica. Drugim rečima, komunikacija kao kohezioni faktor između pojedinih delova sistema postaje ključni faktor u koordinaciji rada pojedinih elemenata. Sve ovo zapravo znači da se prelaskom od centralizovanog na distribuirani sistem ne može pobeći od kompleksnosti cele realizacije. Razlika je jedino u tome što se problemu komunikacije preko računarskih mreža može prići na sistematičniji i utoliko lakši način u odnosu na složenost programiranja centralizovanog računarskog sistema.
1.7. INTEGRISANA ARHITEKTURA SISTEMA Distribucija sistema upravljanja dovela je do jasne podele sistema u funkcionalnom
smislu i otvorila mogućnost da se na svakom od ovih nivoa primena računara zasebno razvija.
Na nivou samog pogona identifikovani su različite funkcionalne celine u okviru kojih se obavljaju posebni upravljački zadaci. Podela je najpre napravljena prema tipu procesa kojim se upravlja (kontinualni ili šaržni). Posebno je izdvojeno i diskretno upravljanje konačnim automatima. Činjenica da u svakom pogonu postoji veliki broj motora koji su često povezani i zahtevaju dosta složeno upravljanje posebno pri puštanju u rad i zaustavljanju dovela je i do razvoja posebnih uređaja – drajvera – koji omogućavaju da se realizuje efikasno programsko upravljanje motorima. Sledeći korak pretstavljao je razvoj algoritama i odgovarajuće opreme za programsko upravljanje kretanjem (motion).
Umesto da se za svaku od upravljačkih funkcija u pogonu formiraju posebni mikroračunarski sistemi, usvojen je koncept modularnog pristupa. Funkcija upravljanja poverena je programabilnim logičkim kontrolerima u koje se postavljaju odgovarajući moduli pomoću kojih se realizuju zahtevani upravljački zadaci. Na taj način je omogućeno da se u svakom pogonu računarska oprema primeri njegovoj dimenziji i zahtevima, ali da se za realizaciju rešenja koriste standardizovane komponente. Sve komponente se povezuju u procesnu mrežu preko koje razmenjuju informacije. Tako je stvorena skalabilna, modularna platforma u okviru koje se realizuje upravljanje pogonom (Sl. 1-16).
Rac_up/24
SL. 1-16
Sledeći, viši nivo na kome automatizovan. I ovde su uočprojektovanje i konfigurisanje sistema, upravljanje proizvodnjom, opremom i podacima, kontrola kvaliteta itd. U osnovi sve ovna procesu. U tom smislu razvijeni su softverski alati koji omogućprocesa koji se odvijaju u pogonu (računarske mreže pomoću kojih se ostvaruje razmena podataka izmeđovom nivou.
SL
Priroda posla na najvišem nivou gde se obavljaju poslovne funkcije dovodi do
razmene velikih paketa relativno retkonije od presudnog značaja. Za razliku od toga, na najnižem procesnom nivou se sa velikom učestanošću razmenjuju mali paketi informacija, pri č
16 RAČUNARSKA OPREMA I MREŽA U POGONU
ći, viši nivo na kome se obavljaju proizvodne funkcije je takođautomatizovan. I ovde su uočene odgovarajuće funkcionalne celine kao što su: projektovanje i konfigurisanje sistema, upravljanje proizvodnjom, opremom i podacima,
U osnovi sve ove funkcije zahtevaju analizu podataka prikupljenih na procesu. U tom smislu razvijeni su softverski alati koji omogućavaju vizuelizaciju procesa koji se odvijaju u pogonu (Sl. 1-17). Istovremeno su razvijene i posebne
ću kojih se ostvaruje razmena podataka između podsistema na
L. 1-17 NADZOR NAD RADOM POGONA
Priroda posla na najvišem nivou gde se obavljaju poslovne funkcije dovodi do paketa relativno retko. Pri tome vreme u kome će razmena biti izvršena
čaja. Za razliku od toga, na najnižem procesnom nivou se sa č ću razmenjuju mali paketi informacija, pri čemu je izuzetno važno da se
je takođe u potpunosti će funkcionalne celine kao što su:
projektovanje i konfigurisanje sistema, upravljanje proizvodnjom, opremom i podacima, e funkcije zahtevaju analizu podataka prikupljenih
ćavaju vizuelizaciju Istovremeno su razvijene i posebne
ć đu podsistema na
Priroda posla na najvišem nivou gde se obavljaju poslovne funkcije dovodi do će razmena biti izvršena
čaja. Za razliku od toga, na najnižem procesnom nivou se sa č ć čemu je izuzetno važno da se

Rac_up/25
prenos obavi unutar datog vremenskog intervala. U skladu sa time nije čudno što su u prvo za svaki od nivoa razvijane posebne računarske mreže. Otuda su za razmenu podataka između njih bili neophodni posebni uređaji kao što je to ilustrovano na Sl. 1-18. Poslednjih godina razvijeni su novi protokoli koji omogućavaju da se informacija direktno prenosi kroz ceo sistem preko svih mreža koje u njemu postoje. Tako je stvorena integrisana arhitektura računarski upravljanih sistema.
SL. 1-18 KOMUNIKACIONE MREŽE NA POJEDINIM HIJERARHIJSKIM NIVO IMA

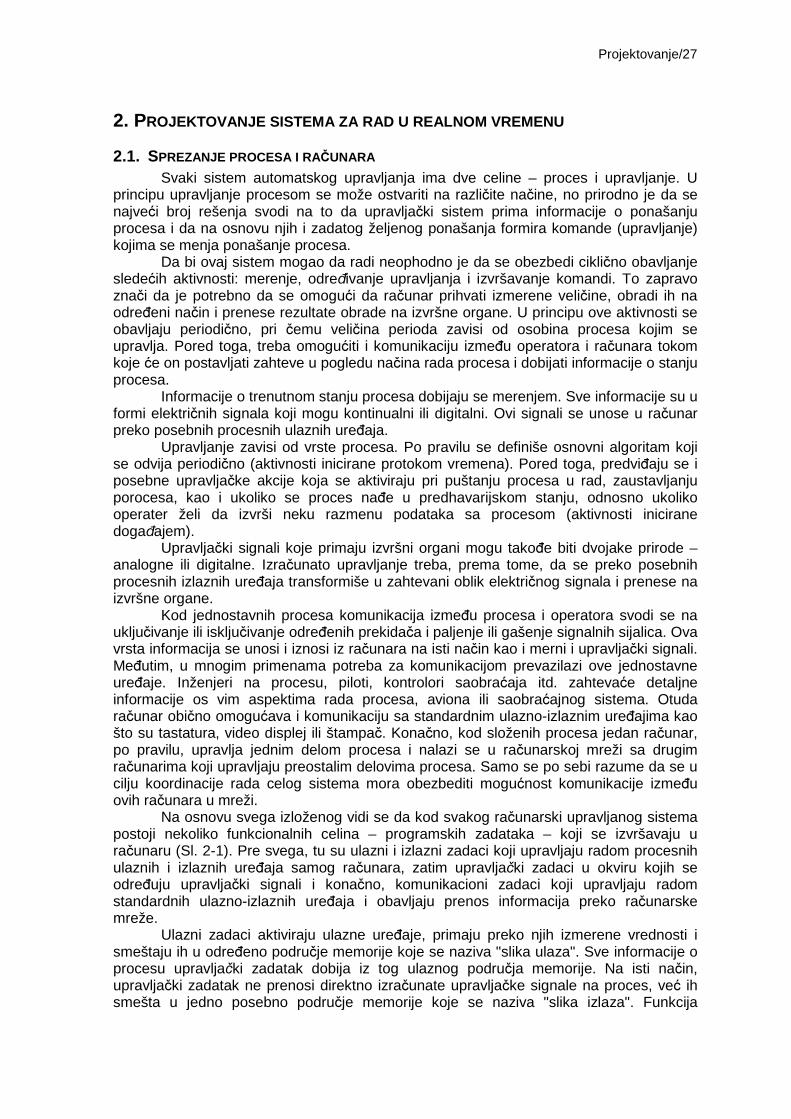
Projektovanje/27
2. PROJEKTOVANJE SISTEMA ZA RAD U REALNOM VREMENU
2.1. SPREZANJE PROCESA I RA ČUNARA Svaki sistem automatskog upravljanja ima dve celine – proces i upravljanje. U
principu upravljanje procesom se može ostvariti na različite načine, no prirodno je da se najveći broj rešenja svodi na to da upravljački sistem prima informacije o ponašanju procesa i da na osnovu njih i zadatog željenog ponašanja formira komande (upravljanje) kojima se menja ponašanje procesa.
Da bi ovaj sistem mogao da radi neophodno je da se obezbedi ciklično obavljanje sledećih aktivnosti: merenje, određivanje upravljanja i izvršavanje komandi. To zapravo znači da je potrebno da se omogući da računar prihvati izmerene veličine, obradi ih na određeni način i prenese rezultate obrade na izvršne organe. U principu ove aktivnosti se obavljaju periodično, pri čemu veličina perioda zavisi od osobina procesa kojim se upravlja. Pored toga, treba omogućiti i komunikaciju između operatora i računara tokom koje će on postavljati zahteve u pogledu načina rada procesa i dobijati informacije o stanju procesa.
Informacije o trenutnom stanju procesa dobijaju se merenjem. Sve informacije su u formi električnih signala koji mogu kontinualni ili digitalni. Ovi signali se unose u računar preko posebnih procesnih ulaznih uređaja.
Upravljanje zavisi od vrste procesa. Po pravilu se definiše osnovni algoritam koji se odvija periodično (aktivnosti inicirane protokom vremena). Pored toga, predviđaju se i posebne upravljačke akcije koja se aktiviraju pri puštanju procesa u rad, zaustavljanju porocesa, kao i ukoliko se proces nađe u predhavarijskom stanju, odnosno ukoliko operater želi da izvrši neku razmenu podataka sa procesom (aktivnosti inicirane događajem).
Upravljački signali koje primaju izvršni organi mogu takođe biti dvojake prirode – analogne ili digitalne. Izračunato upravljanje treba, prema tome, da se preko posebnih procesnih izlaznih uređaja transformiše u zahtevani oblik električnog signala i prenese na izvršne organe.
Kod jednostavnih procesa komunikacija između procesa i operatora svodi se na uključivanje ili isključivanje određenih prekidača i paljenje ili gašenje signalnih sijalica. Ova vrsta informacija se unosi i iznosi iz računara na isti način kao i merni i upravljački signali. Međutim, u mnogim primenama potreba za komunikacijom prevazilazi ove jednostavne uređaje. Inženjeri na procesu, piloti, kontrolori saobraćaja itd. zahtevaće detaljne informacije os vim aspektima rada procesa, aviona ili saobraćajnog sistema. Otuda računar obično omogućava i komunikaciju sa standardnim ulazno-izlaznim uređajima kao što su tastatura, video displej ili štampač. Konačno, kod složenih procesa jedan računar, po pravilu, upravlja jednim delom procesa i nalazi se u računarskoj mreži sa drugim računarima koji upravljaju preostalim delovima procesa. Samo se po sebi razume da se u cilju koordinacije rada celog sistema mora obezbediti mogućnost komunikacije između ovih računara u mreži.
Na osnovu svega izloženog vidi se da kod svakog računarski upravljanog sistema postoji nekoliko funkcionalnih celina – programskih zadataka – koji se izvršavaju u računaru (Sl. 2-1). Pre svega, tu su ulazni i izlazni zadaci koji upravljaju radom procesnih ulaznih i izlaznih uređaja samog računara, zatim upravljački zadaci u okviru kojih se određuju upravljački signali i konačno, komunikacioni zadaci koji upravljaju radom standardnih ulazno-izlaznih uređaja i obavljaju prenos informacija preko računarske mreže.
Ulazni zadaci aktiviraju ulazne uređaje, primaju preko njih izmerene vrednosti i smeštaju ih u određeno područje memorije koje se naziva "slika ulaza". Sve informacije o procesu upravljački zadatak dobija iz tog ulaznog područja memorije. Na isti način, upravljački zadatak ne prenosi direktno izračunate upravljačke signale na proces, već ih smešta u jedno posebno područje memorije koje se naziva "slika izlaza". Funkcija
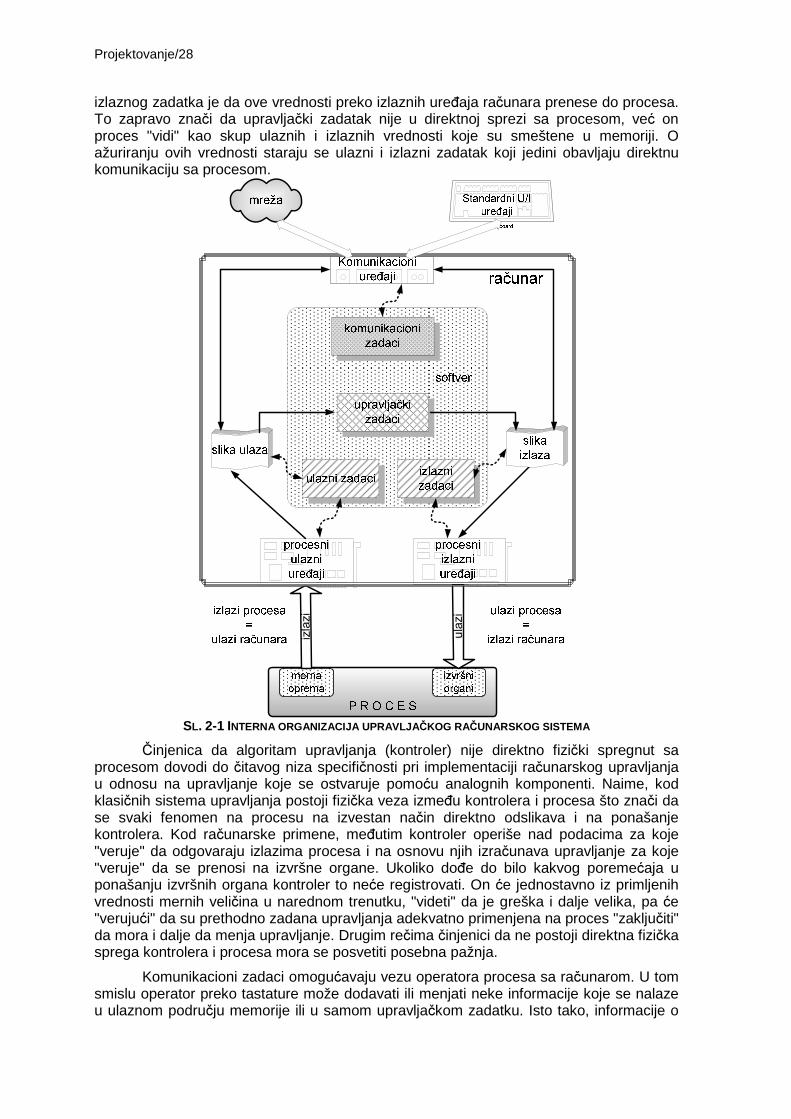
Projektovanje/28
izlaznog zadatka je da ove vrednosti preko izlaznih uređaja računara prenese do procesa. To zapravo znači da upravljački zadatak nije u direktnoj sprezi sa procesom, već on proces "vidi" kao skup ulaznih i izlaznih vrednosti koje su smeštene u memoriji. O ažuriranju ovih vrednosti staraju se ulazni i izlazni zadatak koji jedini obavljaju direktnu komunikaciju sa procesom.
SL. 2-1 INTERNA ORGANIZACIJA UPRAVLJA ČKOG RAČUNARSKOG SISTEMA
Činjenica da algoritam upravljanja (kontroler) nije direktno fizički spregnut sa procesom dovodi do čitavog niza specifičnosti pri implementaciji računarskog upravljanja u odnosu na upravljanje koje se ostvaruje pomoću analognih komponenti. Naime, kod klasičnih sistema upravljanja postoji fizička veza između kontrolera i procesa što znači da se svaki fenomen na procesu na izvestan način direktno odslikava i na ponašanje kontrolera. Kod računarske primene, međutim kontroler operiše nad podacima za koje "veruje" da odgovaraju izlazima procesa i na osnovu njih izračunava upravljanje za koje "veruje" da se prenosi na izvršne organe. Ukoliko dođe do bilo kakvog poremećaja u ponašanju izvršnih organa kontroler to neće registrovati. On će jednostavno iz primljenih vrednosti mernih veličina u narednom trenutku, "videti" da je greška i dalje velika, pa će "verujući" da su prethodno zadana upravljanja adekvatno primenjena na proces "zaključiti" da mora i dalje da menja upravljanje. Drugim rečima činjenici da ne postoji direktna fizička sprega kontrolera i procesa mora se posvetiti posebna pažnja.
Komunikacioni zadaci omogućavaju vezu operatora procesa sa računarom. U tom smislu operator preko tastature može dodavati ili menjati neke informacije koje se nalaze u ulaznom području memorije ili u samom upravljačkom zadatku. Isto tako, informacije o
izlazi
ulazi
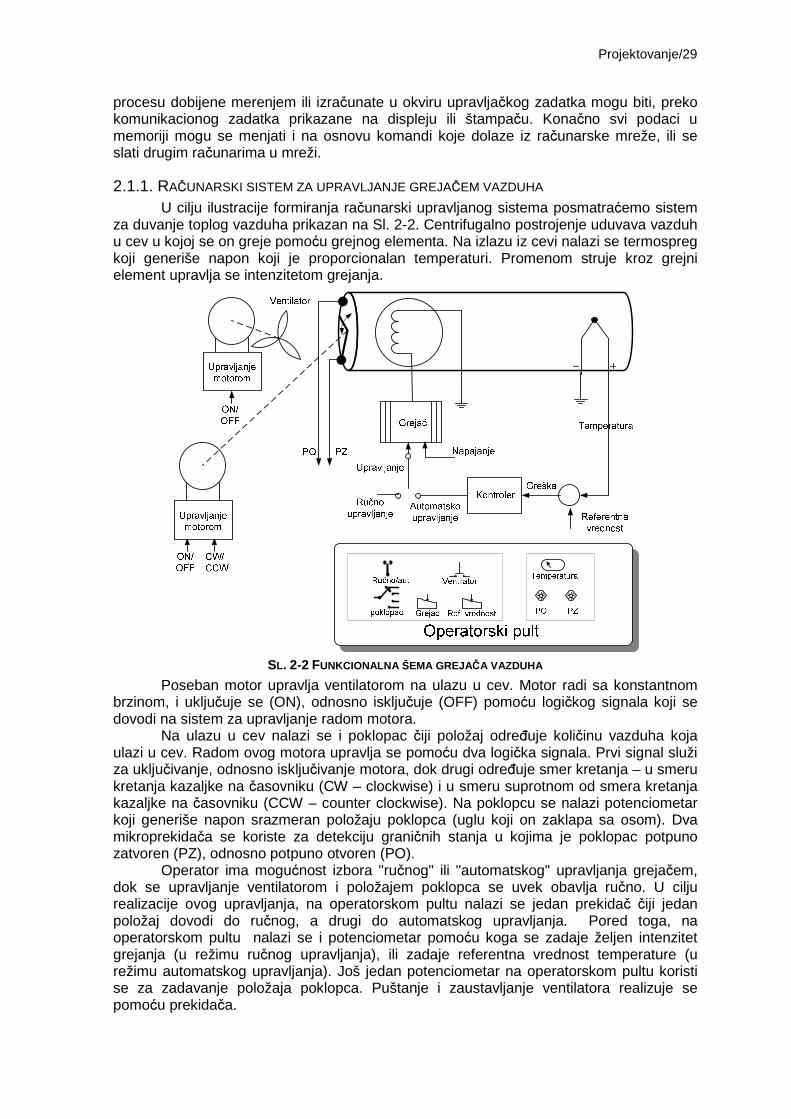
Projektovanje/29
procesu dobijene merenjem ili izračunate u okviru upravljačkog zadatka mogu biti, preko komunikacionog zadatka prikazane na displeju ili štampaču. Konačno svi podaci u memoriji mogu se menjati i na osnovu komandi koje dolaze iz računarske mreže, ili se slati drugim računarima u mreži.
2.1.1. RAČUNARSKI SISTEM ZA UPRAVLJANJE GREJAČEM VAZDUHA U cilju ilustracije formiranja računarski upravljanog sistema posmatraćemo sistem
za duvanje toplog vazduha prikazan na Sl. 2-2. Centrifugalno postrojenje uduvava vazduh u cev u kojoj se on greje pomoću grejnog elementa. Na izlazu iz cevi nalazi se termospreg koji generiše napon koji je proporcionalan temperaturi. Promenom struje kroz grejni element upravlja se intenzitetom grejanja.
SL. 2-2 FUNKCIONALNA ŠEMA GREJA ČA VAZDUHA
Poseban motor upravlja ventilatorom na ulazu u cev. Motor radi sa konstantnom brzinom, i uključuje se (ON), odnosno isključuje (OFF) pomoću logičkog signala koji se dovodi na sistem za upravljanje radom motora.
Na ulazu u cev nalazi se i poklopac čiji položaj određuje količinu vazduha koja ulazi u cev. Radom ovog motora upravlja se pomoću dva logička signala. Prvi signal služi za uključivanje, odnosno isključivanje motora, dok drugi određuje smer kretanja – u smeru kretanja kazaljke na časovniku (CW – clockwise) i u smeru suprotnom od smera kretanja kazaljke na časovniku (CCW – counter clockwise). Na poklopcu se nalazi potenciometar koji generiše napon srazmeran položaju poklopca (uglu koji on zaklapa sa osom). Dva mikroprekidača se koriste za detekciju graničnih stanja u kojima je poklopac potpuno zatvoren (PZ), odnosno potpuno otvoren (PO).
Operator ima mogućnost izbora "ručnog" ili "automatskog" upravljanja grejačem, dok se upravljanje ventilatorom i položajem poklopca se uvek obavlja ručno. U cilju realizacije ovog upravljanja, na operatorskom pultu nalazi se jedan prekidač čiji jedan položaj dovodi do ručnog, a drugi do automatskog upravljanja. Pored toga, na operatorskom pultu nalazi se i potenciometar pomoću koga se zadaje željen intenzitet grejanja (u režimu ručnog upravljanja), ili zadaje referentna vrednost temperature (u režimu automatskog upravljanja). Još jedan potenciometar na operatorskom pultu koristi se za zadavanje položaja poklopca. Puštanje i zaustavljanje ventilatora realizuje se pomoću prekidača.
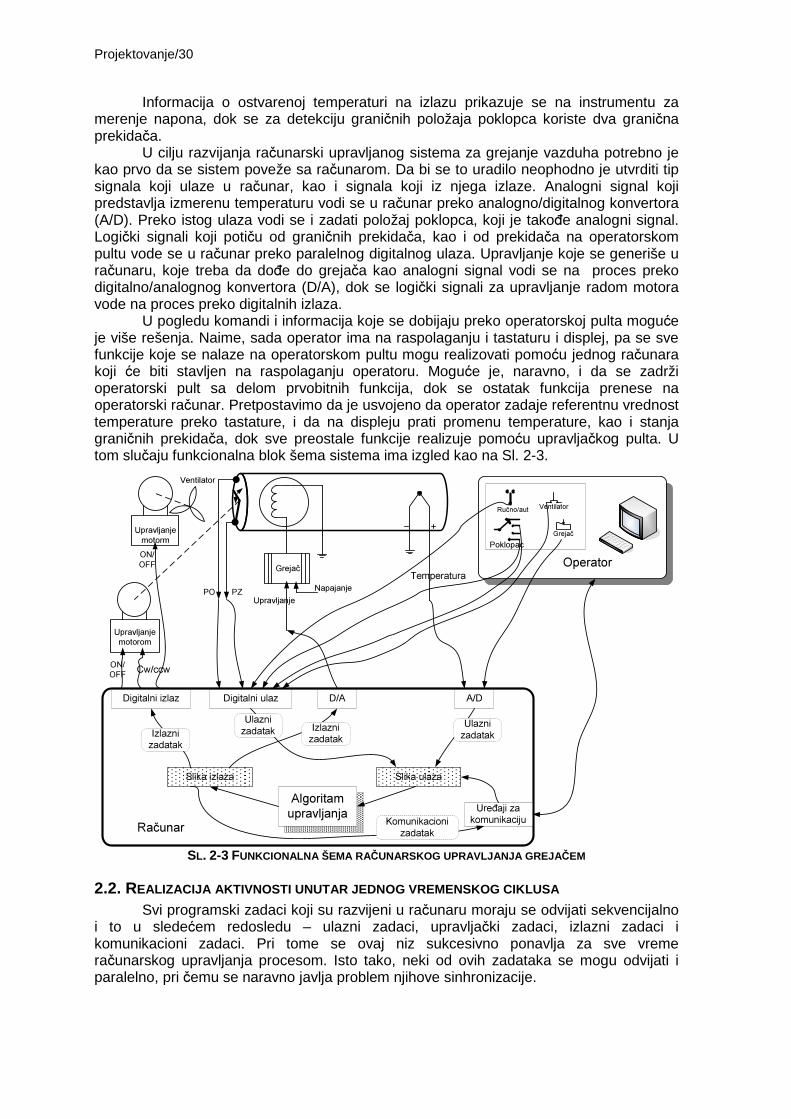
Projektovanje/30
Informacija o ostvarenoj temperaturi na izlazu prikazuje se na instrumentu za merenje napona, dok se za detekciju graničnih položaja poklopca koriste dva granična prekidača.
U cilju razvijanja računarski upravljanog sistema za grejanje vazduha potrebno je kao prvo da se sistem poveže sa računarom. Da bi se to uradilo neophodno je utvrditi tip signala koji ulaze u računar, kao i signala koji iz njega izlaze. Analogni signal koji predstavlja izmerenu temperaturu vodi se u računar preko analogno/digitalnog konvertora (A/D). Preko istog ulaza vodi se i zadati položaj poklopca, koji je takođe analogni signal. Logički signali koji potiču od graničnih prekidača, kao i od prekidača na operatorskom pultu vode se u računar preko paralelnog digitalnog ulaza. Upravljanje koje se generiše u računaru, koje treba da dođe do grejača kao analogni signal vodi se na proces preko digitalno/analognog konvertora (D/A), dok se logički signali za upravljanje radom motora vode na proces preko digitalnih izlaza.
U pogledu komandi i informacija koje se dobijaju preko operatorskoj pulta moguće je više rešenja. Naime, sada operator ima na raspolaganju i tastaturu i displej, pa se sve funkcije koje se nalaze na operatorskom pultu mogu realizovati pomoću jednog računara koji će biti stavljen na raspolaganju operatoru. Moguće je, naravno, i da se zadrži operatorski pult sa delom prvobitnih funkcija, dok se ostatak funkcija prenese na operatorski računar. Pretpostavimo da je usvojeno da operator zadaje referentnu vrednost temperature preko tastature, i da na displeju prati promenu temperature, kao i stanja graničnih prekidača, dok sve preostale funkcije realizuje pomoću upravljačkog pulta. U tom slučaju funkcionalna blok šema sistema ima izgled kao na Sl. 2-3.
SL. 2-3 FUNKCIONALNA ŠEMA RA ČUNARSKOG UPRAVLJANJA GREJA ČEM
2.2. REALIZACIJA AKTIVNOSTI UNUTAR JEDNOG VREMENSKOG CIKLUSA Svi programski zadaci koji su razvijeni u računaru moraju se odvijati sekvencijalno
i to u sledećem redosledu – ulazni zadaci, upravljački zadaci, izlazni zadaci i komunikacioni zadaci. Pri tome se ovaj niz sukcesivno ponavlja za sve vreme računarskog upravljanja procesom. Isto tako, neki od ovih zadataka se mogu odvijati i paralelno, pri čemu se naravno javlja problem njihove sinhronizacije.
Ventilator
GrejačTemperatura
Upravljanje
Upravljanje
motorm
ON/
OFF
PZPO
Grejač
Ventilator
Upravljanje
motorom
ON/
OFFCw/ccw
Operator
Napajanje
A/DD/ADigitalni izlaz Digitalni ulaz
Algoritam
upravljanja
Slika ulazaSlika izlaza
Uređaji za
komunikacijuRačunar
Izlazni
zadatakIzlazni
zadatak
Ulazni
zadatak
Ulazni
zadatak
Komunikacioni
zadatak
Ručno/aut
Poklopac
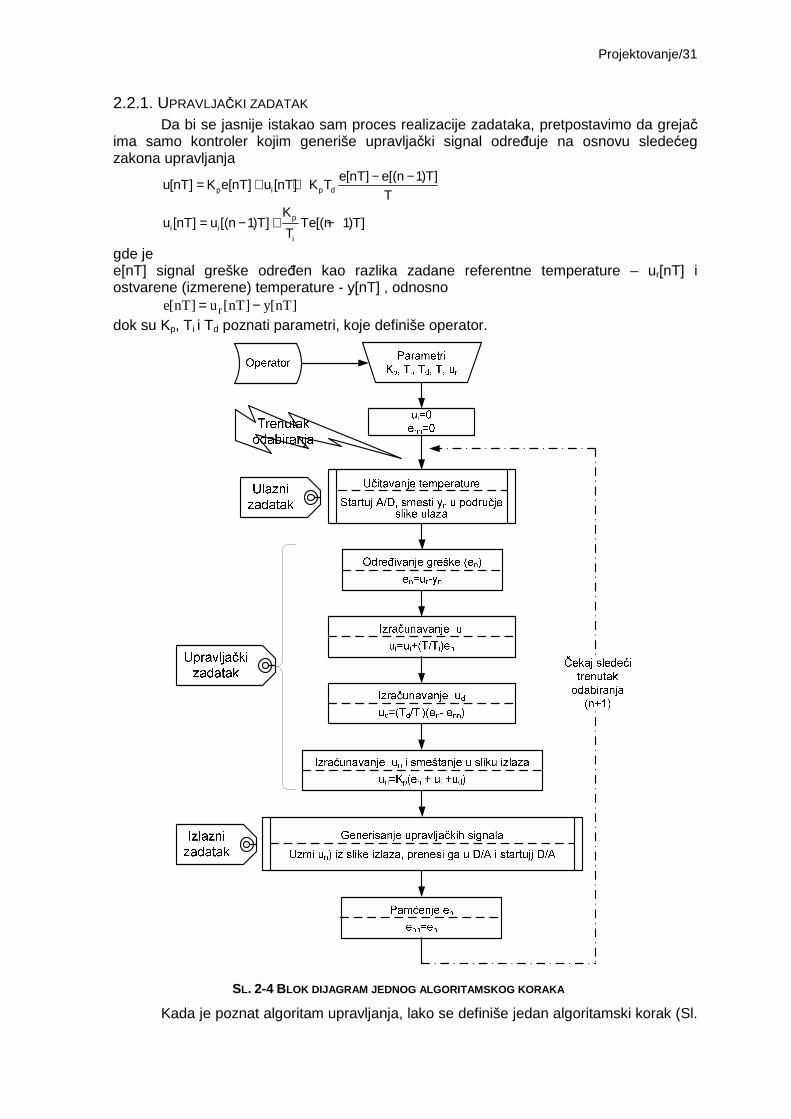
Projektovanje/31
2.2.1. UPRAVLJAČKI ZADATAK Da bi se jasnije istakao sam proces realizacije zadataka, pretpostavimo da grejač
ima samo kontroler kojim generiše upravljački signal određuje na osnovu sledećeg zakona upravljanja
p i p d
pi i
i
e[nT] e[(n 1)T]u[nT] K e[nT] u [nT] K T
TK
u [nT] u [(n 1)T] Te[(n 1)T]T
− −= + +
= − + −
gde je e[nT] signal greške određen kao razlika zadane referentne temperature – ur[nT] i ostvarene (izmerene) temperature - y[nT] , odnosno
re[nT] u [nT] y[nT]= − dok su Kp, Ti i Td poznati parametri, koje definiše operator.
Kada je poznat algoritam upravljanja, lako se definiše jedan algoritamski korak (Sl.
SL. 2-4 BLOK DIJAGRAM JEDNOG ALGORITAMSKOG KORAKA
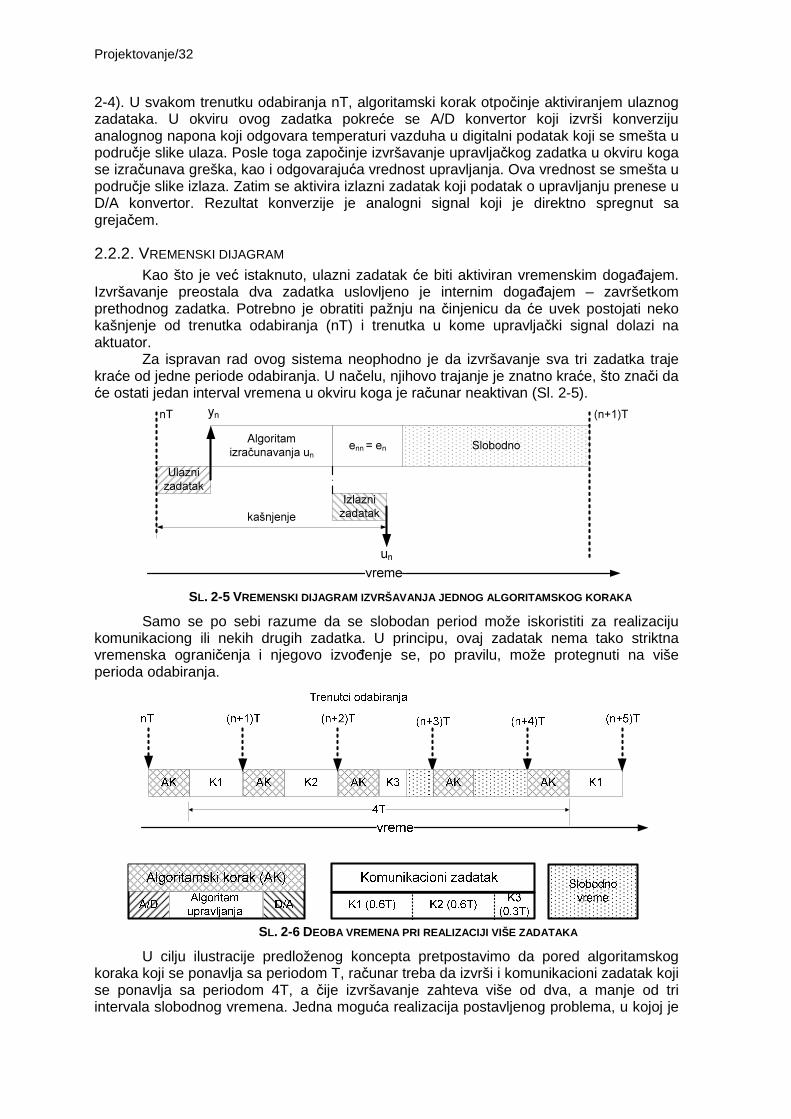
Projektovanje/32
2-4). U svakom trenutku odabiranja nT, algoritamski korak otpočinje aktiviranjem ulaznog zadataka. U okviru ovog zadatka pokreće se A/D konvertor koji izvrši konverziju analognog napona koji odgovara temperaturi vazduha u digitalni podatak koji se smešta u područje slike ulaza. Posle toga započinje izvršavanje upravljačkog zadatka u okviru koga se izračunava greška, kao i odgovarajuća vrednost upravljanja. Ova vrednost se smešta u područje slike izlaza. Zatim se aktivira izlazni zadatak koji podatak o upravljanju prenese u D/A konvertor. Rezultat konverzije je analogni signal koji je direktno spregnut sa grejačem.
2.2.2. VREMENSKI DIJAGRAM Kao što je već istaknuto, ulazni zadatak će biti aktiviran vremenskim događajem.
Izvršavanje preostala dva zadatka uslovljeno je internim događajem – završetkom prethodnog zadatka. Potrebno je obratiti pažnju na činjenicu da će uvek postojati neko kašnjenje od trenutka odabiranja (nT) i trenutka u kome upravljački signal dolazi na aktuator.
Za ispravan rad ovog sistema neophodno je da izvršavanje sva tri zadatka traje kraće od jedne periode odabiranja. U načelu, njihovo trajanje je znatno kraće, što znači da će ostati jedan interval vremena u okviru koga je računar neaktivan (Sl. 2-5).
Samo se po sebi razume da se slobodan period može iskoristiti za realizaciju komunikaciong ili nekih drugih zadatka. U principu, ovaj zadatak nema tako striktna vremenska ograničenja i njegovo izvođenje se, po pravilu, može protegnuti na više perioda odabiranja.
U cilju ilustracije predloženog koncepta pretpostavimo da pored algoritamskog koraka koji se ponavlja sa periodom T, računar treba da izvrši i komunikacioni zadatak koji se ponavlja sa periodom 4T, a čije izvršavanje zahteva više od dva, a manje od tri intervala slobodnog vremena. Jedna moguća realizacija postavljenog problema, u kojoj je
Algoritam
izračunavanja un
Ulazni
zadatakIzlazni
zadatak
un
yn
Slobodno
nT (n+1)T
enn = en
kašnjenje
vreme
SL. 2-5 VREMENSKI DIJAGRAM IZVRŠAVANJA JEDNOG ALGORITAMSKOG KORAKA
SL. 2-6 DEOBA VREMENA PRI REALIZACIJI VIŠE ZADATAKA
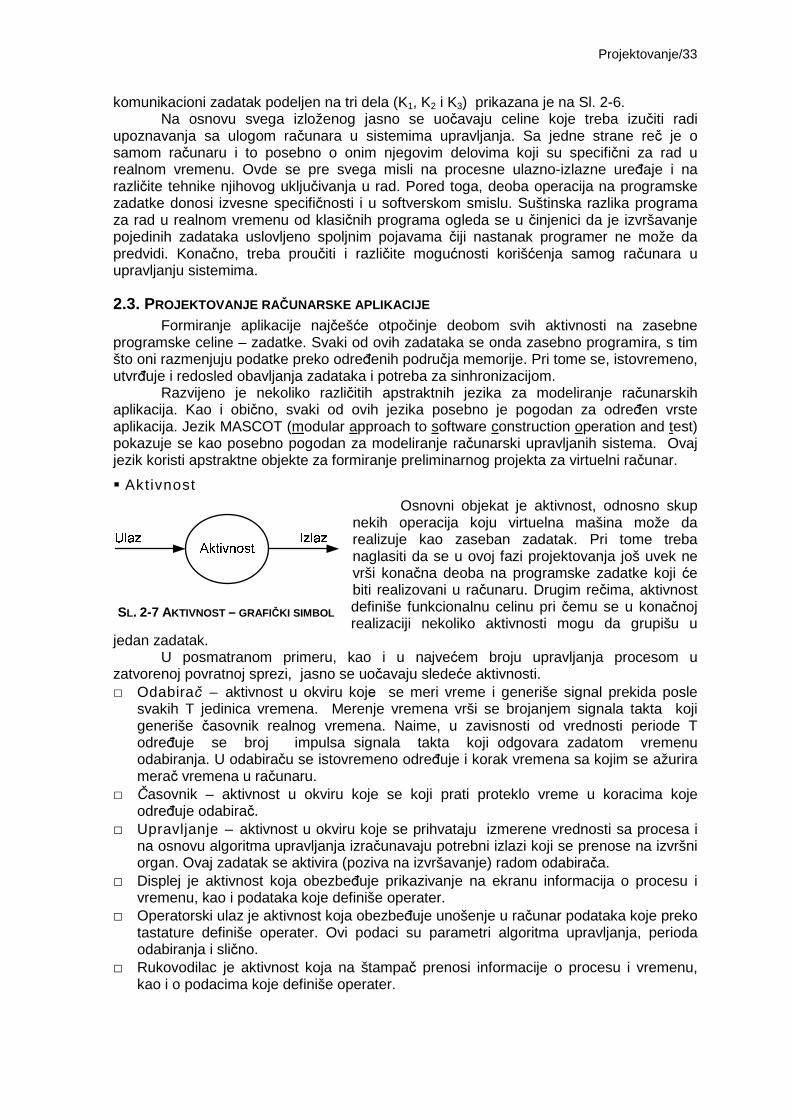
Projektovanje/33
komunikacioni zadatak podeljen na tri dela (K1, K2 i K3) prikazana je na Sl. 2-6. Na osnovu svega izloženog jasno se uočavaju celine koje treba izučiti radi
upoznavanja sa ulogom računara u sistemima upravljanja. Sa jedne strane reč je o samom računaru i to posebno o onim njegovim delovima koji su specifični za rad u realnom vremenu. Ovde se pre svega misli na procesne ulazno-izlazne uređaje i na različite tehnike njihovog uključivanja u rad. Pored toga, deoba operacija na programske zadatke donosi izvesne specifičnosti i u softverskom smislu. Suštinska razlika programa za rad u realnom vremenu od klasičnih programa ogleda se u činjenici da je izvršavanje pojedinih zadataka uslovljeno spoljnim pojavama čiji nastanak programer ne može da predvidi. Konačno, treba proučiti i različite mogućnosti korišćenja samog računara u upravljanju sistemima.
2.3. PROJEKTOVANJE RA ČUNARSKE APLIKACIJE Formiranje aplikacije najčešće otpočinje deobom svih aktivnosti na zasebne
programske celine – zadatke. Svaki od ovih zadataka se onda zasebno programira, s tim što oni razmenjuju podatke preko određenih područja memorije. Pri tome se, istovremeno, utvrđuje i redosled obavljanja zadataka i potreba za sinhronizacijom.
Razvijeno je nekoliko različitih apstraktnih jezika za modeliranje računarskih aplikacija. Kao i obično, svaki od ovih jezika posebno je pogodan za određen vrste aplikacija. Jezik MASCOT (modular approach to software construction operation and test) pokazuje se kao posebno pogodan za modeliranje računarski upravljanih sistema. Ovaj jezik koristi apstraktne objekte za formiranje preliminarnog projekta za virtuelni računar.
Akt ivnost Osnovni objekat je aktivnost, odnosno skup
nekih operacija koju virtuelna mašina može da realizuje kao zaseban zadatak. Pri tome treba naglasiti da se u ovoj fazi projektovanja još uvek ne vrši konačna deoba na programske zadatke koji će biti realizovani u računaru. Drugim rečima, aktivnost definiše funkcionalnu celinu pri čemu se u konačnoj realizaciji nekoliko aktivnosti mogu da grupišu u
jedan zadatak. U posmatranom primeru, kao i u najvećem broju upravljanja procesom u
zatvorenoj povratnoj sprezi, jasno se uočavaju sledeće aktivnosti. Odabirač – aktivnost u okviru kojе se meri vreme i generiše signal prekida posle
svakih T jedinica vremena. Merenje vremena vrši se brojanjem signala takta koji generiše časovnik realnog vremena. Naime, u zavisnosti od vrednosti periode T određuje se broj impulsa signala takta koji odgovara zadatom vremenu odabiranja. U odabiraču se istovremeno određuje i korak vremena sa kojim se ažurira merač vremena u računaru.
Časovnik – aktivnost u okviru koje se koji prati proteklo vreme u koracima koje određuje odabirač.
Upravljanje – aktivnost u okviru koje se prihvataju izmerene vrednosti sa procesa i na osnovu algoritma upravljanja izračunavaju potrebni izlazi koji se prenose na izvršni organ. Ovaj zadatak se aktivira (poziva na izvršavanje) radom odabirača.
Displej je aktivnost koja obezbeđuje prikazivanje na ekranu informacija o procesu i vremenu, kao i podataka koje definiše operater.
Operatorski ulaz je aktivnost koja obezbeđuje unošenje u računar podataka koje preko tastature definiše operater. Ovi podaci su parametri algoritma upravljanja, perioda odabiranja i slično.
Rukovodilac je aktivnost koja na štampač prenosi informacije o procesu i vremenu, kao i o podacima koje definiše operater.
SL. 2-7 AKTIVNOST – GRAFIČKI SIMBOL
Projektovanje/34
Komunikacija Samo se po sebi razume da različite definisane aktivnosti ne mogu da se realizuju odvojeno, jer one treba da obavljaju funkcije koje su međusobno povezane. Otuda se javlja potreba za uspostavljanjem komunikacije između aktivnosti i sinhronizacije njihovog rada. Komunikacije između aktivnosti mogu da se podele u tri kategorije:
• direktna razmena podataka između dve aktivnosti • deoba informacija između više aktivnosti • sinhronizacioni signali
Za opisivanje diskretne razmene podataka pogodno je da se koristi koncept kanal. Pored povezivanja dve aktivnosti kanal može imati i memorijske kapacitete tako da kroz kanal u jednom trenutku može da se prenese više podataka istovremeno. U posmatranom primeru podaci se iz objekta operatorski ulaz u objekat displej prenose preko kanala.
Simbolički objekat pul (pool) koristi se za predstavljanje grupe podataka koja je na raspolaganju većem broju aktivnosti. U posmatranom primeru neophodno je formirati pul podataka o vremenu ("podaci o vremenu"), koji puni aktivnost časovnik, a koriste druge aktivnosti. Pored toga formira se i pul "sprega sa procesom" u koji će ulazni zadatak smeštati merne podatke, a aktivnost upravljanje smeštati izračunate upravljačke signale, koje će izlazni zadatak preneti na izvršne organe. Konačno, aktivnost upravljanje koristi vrednosti parametara (Kp, Ti i Td) koje su prethodne
određene i smeštene u pul "informacija o procesu". Podaci o procesu koje prima ova aktivnost takođe se smeštaju u pul "informacija o procesu".
Neophodno je da postoji mogućnost da se aktivnosti pokrenu, zaustave ili zakasne. Isto tako, u cilju uspešnog rada aktivnosti moraju da razmenjuju informacije tipa "jesi li spreman da uzmeš podatke" ili "imaš li neke podatke za mene". Drugim rečima neophodno je da se na neki način omogući sinhronizacija rada aktivnosti.
Neupuštajući se u detalje same realizacije, sinhronizacija se, na ovom nivou projektovanja, može predstaviti pomoću dve procedure WAIT (event) i SIGNAL (event) koje imaju sledeće osobine: • WAIT (event) – čim se izvrši WAIT operacija, aktivnost se prekida (suspenduje) i ostaje u tom stanju sve se dok događaj (event) koji je prouzrokovao suspenziju ne dogodi i ne aktivira proceduru SIGNAL. Ako je u trenutku izvršavanja WAIT procedure, događaj aktivan, aktivnost se ne prekida.
• SIGNAL (event) – ova procedura jednostavno "saopštava" (obznanjuje) da se odgovarajući događaj desio, čime se omogućava svim aktivnostima koje su u stanju čekanja tog događaja da nastave svoj rad.
Procedura WAIT se može shvatiti kao procedura koja neprekidno očitava stanje događaja iz nekog pula ili sa kanala. U tom slučaju SIGNAL je procedura koja informaciju o tom događaju upisuje u pul ili u kanal.
Kod računarskog upravljanja procesima, događaji na procesu mogu uslovljavati rad pojedinih aktivnosti. Ovi događaji se najčešće registruju pomoću signala prekida, koji se takođe mogu interpretirati kao signali sinhronizacije.
Konačno, istaknimo da se hardverski uređaji simbolički predstavljaju pravougaonikom. Usvajajući značenje izloženih grafičkih simbola, računarska aplikacija upravljanja grejačem vazduha sa međusobnim odnosima svih navedenih zadataka može se grafički prikazati kao na Sl. 2-11.
SL. 2-8 KANAL
SL. 2-9 PUL
SL. 2-10 SIGNALI ZA SINHRONIZACIJU
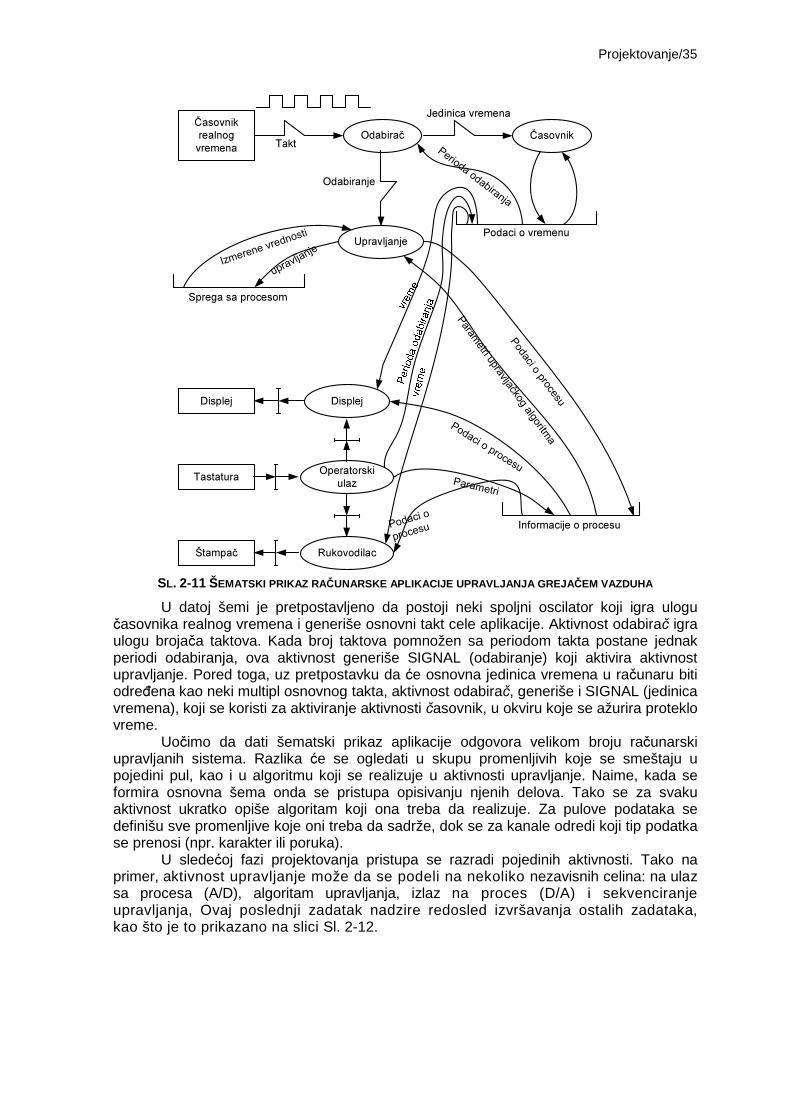
Projektovanje/35
SL. 2-11 ŠEMATSKI PRIKAZ RA ČUNARSKE APLIKACIJE UPRAVLJANJA GREJA ČEM VAZDUHA
U datoj šemi je pretpostavljeno da postoji neki spoljni oscilator koji igra ulogu časovnika realnog vremena i generiše osnovni takt cele aplikacije. Aktivnost odabirač igra ulogu brojača taktova. Kada broj taktova pomnožen sa periodom takta postane jednak periodi odabiranja, ova aktivnost generiše SIGNAL (odabiranje) koji aktivira aktivnost upravljanje. Pored toga, uz pretpostavku da će osnovna jedinica vremena u računaru biti određena kao neki multipl osnovnog takta, aktivnost odabirač, generiše i SIGNAL (jedinica vremena), koji se koristi za aktiviranje aktivnosti časovnik, u okviru koje se ažurira proteklo vreme.
Uočimo da dati šematski prikaz aplikacije odgovora velikom broju računarski upravljanih sistema. Razlika će se ogledati u skupu promenljivih koje se smeštaju u pojedini pul, kao i u algoritmu koji se realizuje u aktivnosti upravljanje. Naime, kada se formira osnovna šema onda se pristupa opisivanju njenih delova. Tako se za svaku aktivnost ukratko opiše algoritam koji ona treba da realizuje. Za pulove podataka se definišu sve promenljive koje oni treba da sadrže, dok se za kanale odredi koji tip podatka se prenosi (npr. karakter ili poruka).
U sledećoj fazi projektovanja pristupa se razradi pojedinih aktivnosti. Tako na primer, aktivnost upravljanje može da se podeli na nekoliko nezavisnih celina: na ulaz sa procesa (A/D), algoritam upravljanja, izlaz na proces (D/A) i sekvenciranje upravljanja, Ovaj poslednji zadatak nadzire redosled izvršavanja ostalih zadataka, kao što je to prikazano na slici Sl. 2-12.
Časovnik realnog vremena
Odabirač Časovnik
Podaci o vremenuUpravljanje
Sprega sa procesom
Perioda odabiranja
I z m e r e n e v r e d n o s t i
u pr a v
l j an j e
Displej
Operatorski ulaz
Rukovodilac
Displej
Tastatura
Štampač
Informacije o procesuP o d a c i o
p r o c e s u
P aramet ri
P odaci o pr ocesu
Podaci o procesu
Par am
et r i upr av l j ač k og al gor i t ma
Jedinica vremena
Odabiranje
Takt
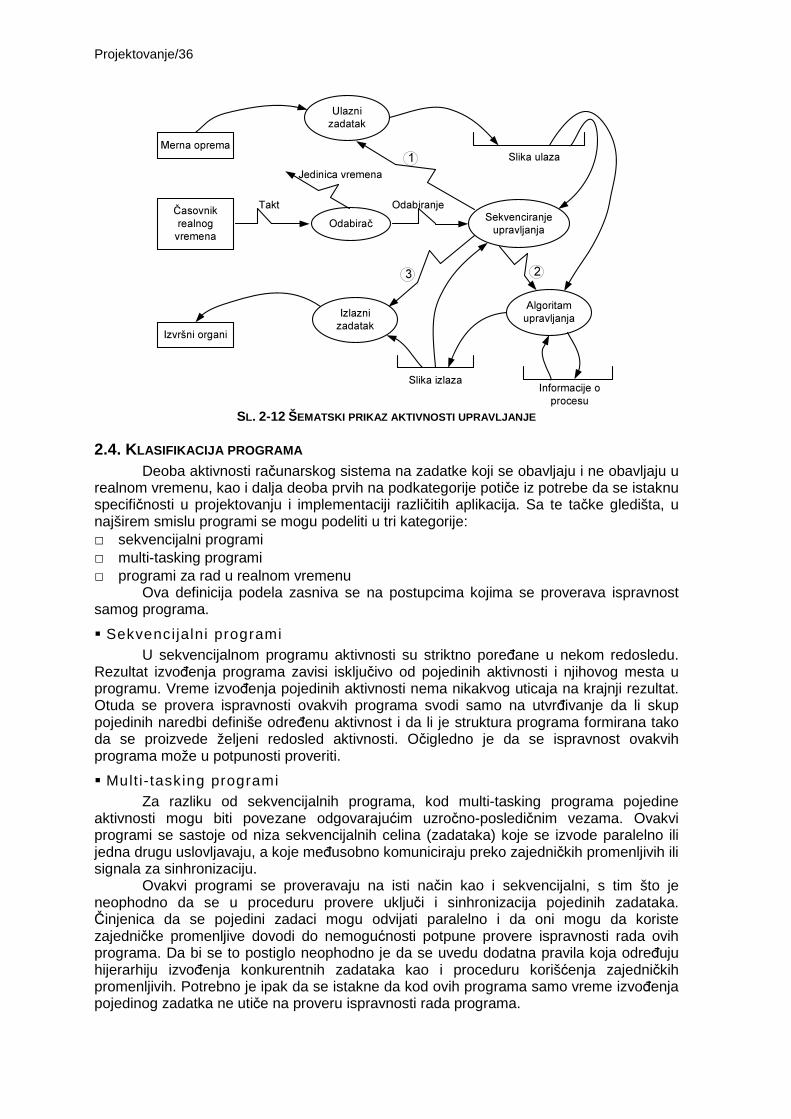
Projektovanje/36
SL. 2-12 ŠEMATSKI PRIKAZ AKTIVNOSTI UPRAVLJANJE
2.4. KLASIFIKACIJA PROGRAMA Deoba aktivnosti računarskog sistema na zadatke koji se obavljaju i ne obavljaju u
realnom vremenu, kao i dalja deoba prvih na podkategorije potiče iz potrebe da se istaknu specifičnosti u projektovanju i implementaciji različitih aplikacija. Sa te tačke gledišta, u najširem smislu programi se mogu podeliti u tri kategorije: sekvencijalni programi multi-tasking programi programi za rad u realnom vremenu
Ova definicija podela zasniva se na postupcima kojima se proverava ispravnost samog programa.
Sekvencijalni programi U sekvencijalnom programu aktivnosti su striktno poređane u nekom redosledu.
Rezultat izvođenja programa zavisi isključivo od pojedinih aktivnosti i njihovog mesta u programu. Vreme izvođenja pojedinih aktivnosti nema nikakvog uticaja na krajnji rezultat. Otuda se provera ispravnosti ovakvih programa svodi samo na utvrđivanje da li skup pojedinih naredbi definiše određenu aktivnost i da li je struktura programa formirana tako da se proizvede željeni redosled aktivnosti. Očigledno je da se ispravnost ovakvih programa može u potpunosti proveriti.
Mult i- tasking programi Za razliku od sekvencijalnih programa, kod multi-tasking programa pojedine
aktivnosti mogu biti povezane odgovarajućim uzročno-posledičnim vezama. Ovakvi programi se sastoje od niza sekvencijalnih celina (zadataka) koje se izvode paralelno ili jedna drugu uslovljavaju, a koje međusobno komuniciraju preko zajedničkih promenljivih ili signala za sinhronizaciju.
Ovakvi programi se proveravaju na isti način kao i sekvencijalni, s tim što je neophodno da se u proceduru provere uključi i sinhronizacija pojedinih zadataka. Činjenica da se pojedini zadaci mogu odvijati paralelno i da oni mogu da koriste zajedničke promenljive dovodi do nemogućnosti potpune provere ispravnosti rada ovih programa. Da bi se to postiglo neophodno je da se uvedu dodatna pravila koja određuju hijerarhiju izvođenja konkurentnih zadataka kao i proceduru korišćenja zajedničkih promenljivih. Potrebno je ipak da se istakne da kod ovih programa samo vreme izvođenja pojedinog zadatka ne utiče na proveru ispravnosti rada programa.
Časovnik realnog vremena
OdabiračSekvenciranje
upravljanja
Merna oprema
Izvršni organi
Ulazni zadatak
Slika ulaza
Izlazni zadatak
Algoritam upravljanja
1
23
Slika izlazaInformacije o
procesu
OdabiranjeTakt
Jedinica vremena
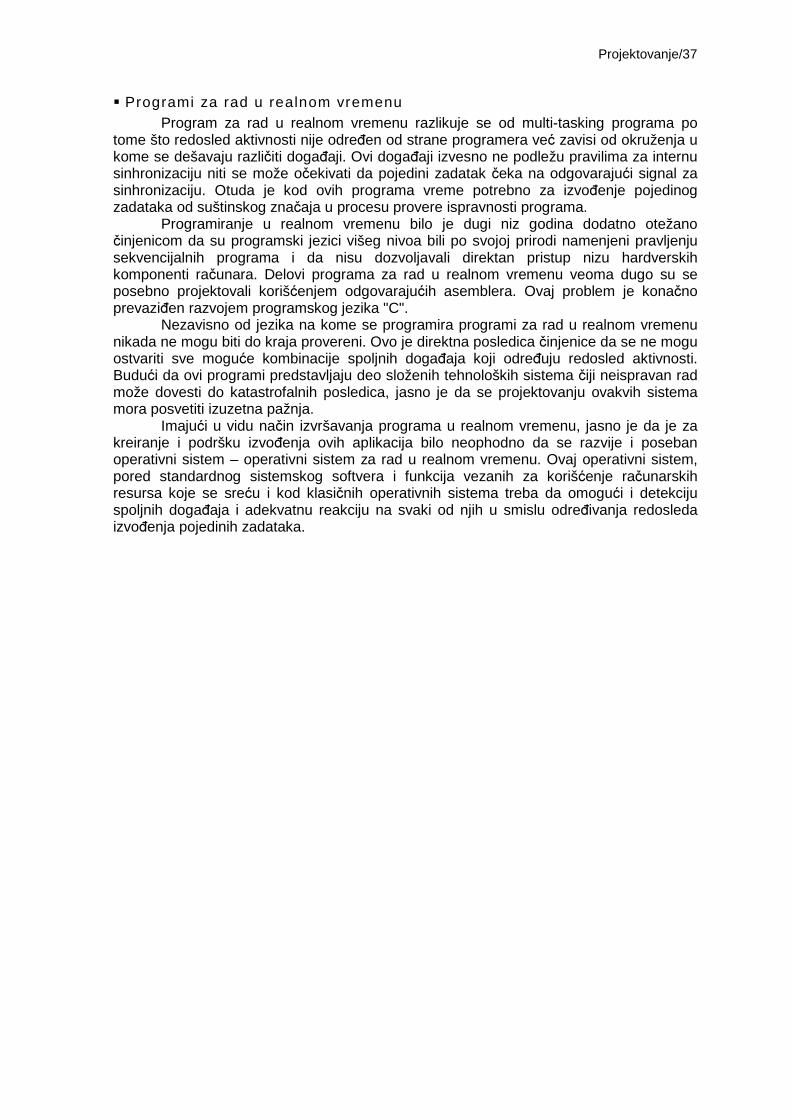
Projektovanje/37
Programi za rad u realnom vremenu Program za rad u realnom vremenu razlikuje se od multi-tasking programa po
tome što redosled aktivnosti nije određen od strane programera već zavisi od okruženja u kome se dešavaju različiti događaji. Ovi događaji izvesno ne podležu pravilima za internu sinhronizaciju niti se može očekivati da pojedini zadatak čeka na odgovarajući signal za sinhronizaciju. Otuda je kod ovih programa vreme potrebno za izvođenje pojedinog zadataka od suštinskog značaja u procesu provere ispravnosti programa.
Programiranje u realnom vremenu bilo je dugi niz godina dodatno otežano činjenicom da su programski jezici višeg nivoa bili po svojoj prirodi namenjeni pravljenju sekvencijalnih programa i da nisu dozvoljavali direktan pristup nizu hardverskih komponenti računara. Delovi programa za rad u realnom vremenu veoma dugo su se posebno projektovali korišćenjem odgovarajućih asemblera. Ovaj problem je konačno prevaziđen razvojem programskog jezika "C".
Nezavisno od jezika na kome se programira programi za rad u realnom vremenu nikada ne mogu biti do kraja provereni. Ovo je direktna posledica činjenice da se ne mogu ostvariti sve moguće kombinacije spoljnih događaja koji određuju redosled aktivnosti. Budući da ovi programi predstavljaju deo složenih tehnoloških sistema čiji neispravan rad može dovesti do katastrofalnih posledica, jasno je da se projektovanju ovakvih sistema mora posvetiti izuzetna pažnja.
Imajući u vidu način izvršavanja programa u realnom vremenu, jasno je da je za kreiranje i podršku izvođenja ovih aplikacija bilo neophodno da se razvije i poseban operativni sistem – operativni sistem za rad u realnom vremenu. Ovaj operativni sistem, pored standardnog sistemskog softvera i funkcija vezanih za korišćenje računarskih resursa koje se sreću i kod klasičnih operativnih sistema treba da omogući i detekciju spoljnih događaja i adekvatnu reakciju na svaki od njih u smislu određivanja redosleda izvođenja pojedinih zadataka.

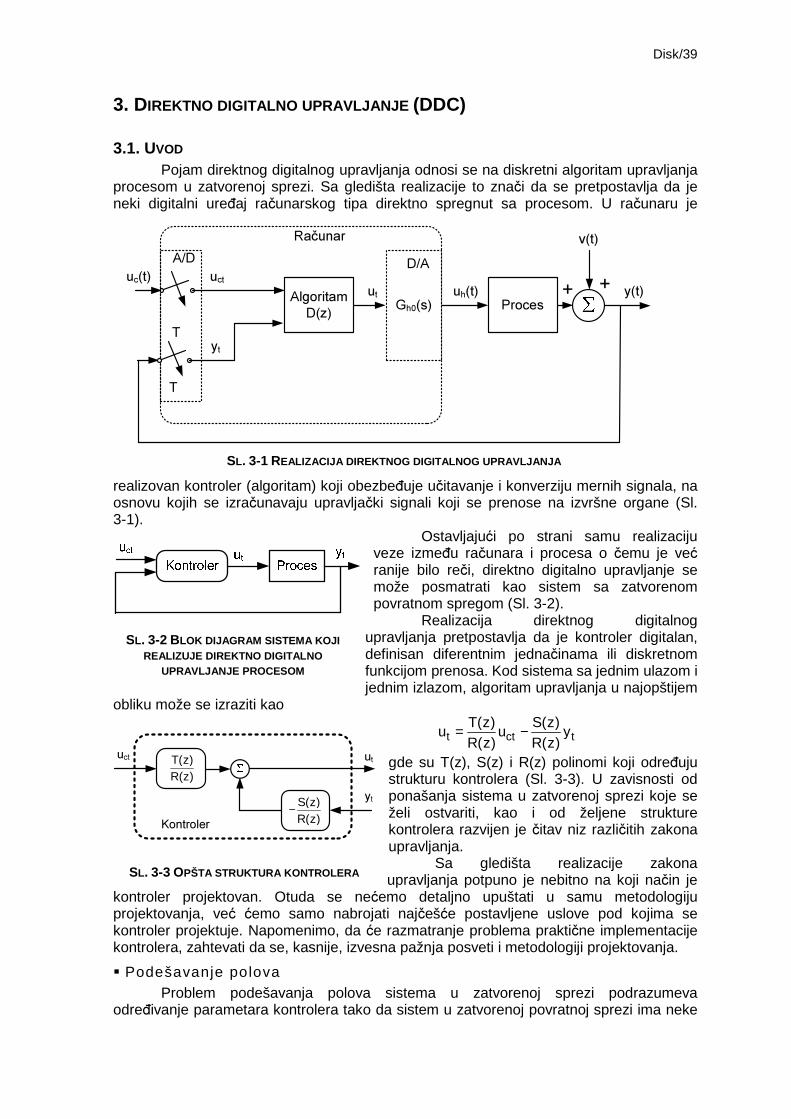
Disk/39
3. DIREKTNO DIGITALNO UPRAVLJANJE (DDC)
3.1. UVOD Pojam direktnog digitalnog upravljanja odnosi se na diskretni algoritam upravljanja
procesom u zatvorenoj sprezi. Sa gledišta realizacije to znači da se pretpostavlja da je neki digitalni uređaj računarskog tipa direktno spregnut sa procesom. U računaru je
realizovan kontroler (algoritam) koji obezbeđuje učitavanje i konverziju mernih signala, na osnovu kojih se izračunavaju upravljački signali koji se prenose na izvršne organe (Sl. 3-1).
Ostavljajući po strani samu realizaciju veze između računara i procesa o čemu je već ranije bilo reči, direktno digitalno upravljanje se može posmatrati kao sistem sa zatvorenom povratnom spregom (Sl. 3-2).
Realizacija direktnog digitalnog upravljanja pretpostavlja da je kontroler digitalan, definisan diferentnim jednačinama ili diskretnom funkcijom prenosa. Kod sistema sa jednim ulazom i jednim izlazom, algoritam upravljanja u najopštijem
obliku može se izraziti kao
t ct tT(z) S(z)
u u yR(z) R(z)
= −
gde su T(z), S(z) i R(z) polinomi koji određuju strukturu kontrolera (Sl. 3-3). U zavisnosti od ponašanja sistema u zatvorenoj sprezi koje se želi ostvariti, kao i od željene strukture kontrolera razvijen je čitav niz različitih zakona upravljanja.
Sa gledišta realizacije zakona upravljanja potpuno je nebitno na koji način je
kontroler projektovan. Otuda se nećemo detaljno upuštati u samu metodologiju projektovanja, već ćemo samo nabrojati najčešće postavljene uslove pod kojima se kontroler projektuje. Napomenimo, da će razmatranje problema praktične implementacije kontrolera, zahtevati da se, kasnije, izvesna pažnja posveti i metodologiji projektovanja.
Podešavanje polova Problem podešavanja polova sistema u zatvorenoj sprezi podrazumeva
određivanje parametara kontrolera tako da sistem u zatvorenoj povratnoj sprezi ima neke
SL. 3-1 REALIZACIJA DIREKTNOG DIGITALNOG UPRAVLJANJA
SL. 3-2 BLOK DIJAGRAM SISTEMA KOJI REALIZUJE DIREKTNO DIGITALNO
UPRAVLJANJE PROCESOM
SL. 3-3 OPŠTA STRUKTURA KONTROLERA
uh(t) y(t)Proces
uc(t)
Algoritam
D(z)
T
A/D
Gh0(s)
D/A
ut++
v(t)Računar
T
uct
yt
ut
S(z)R(z)
−
uct T(z)R(z)
yt
Kontroler
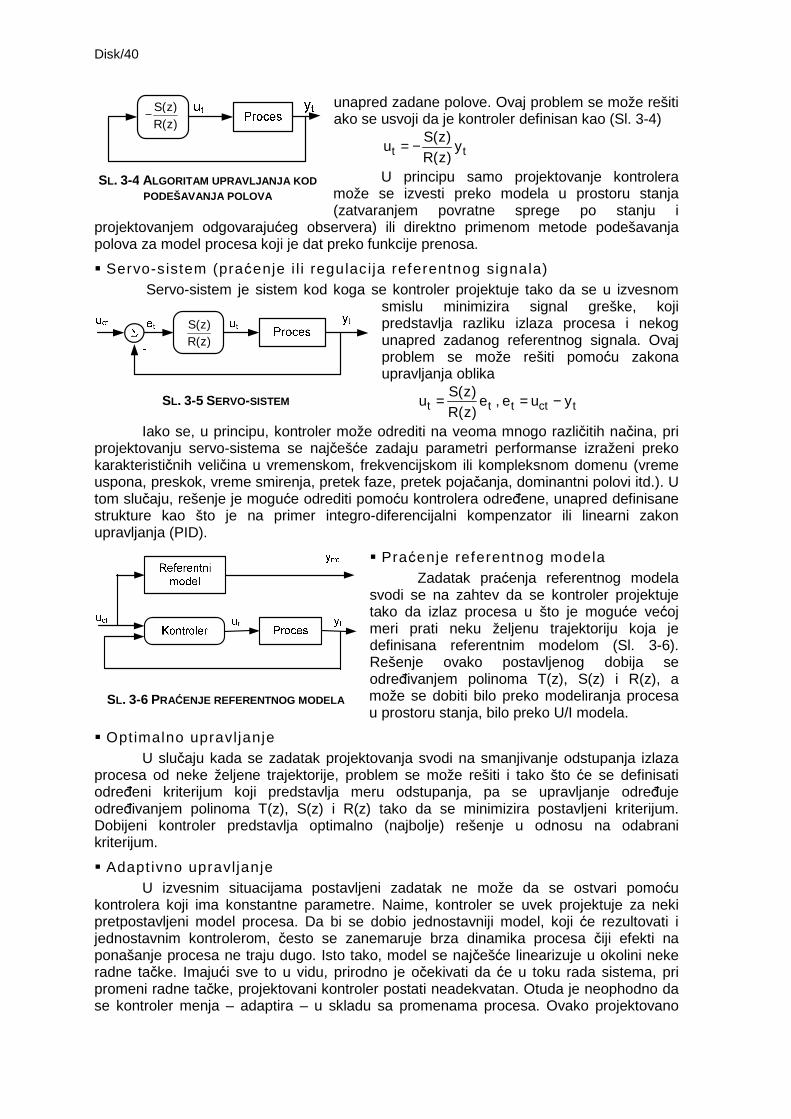
Disk/40
unapred zadane polove. Ovaj problem se može rešiti ako se usvoji da je kontroler definisan kao (Sl. 3-4)
t tS(z)
u yR(z)
= −
U principu samo projektovanje kontrolera može se izvesti preko modela u prostoru stanja (zatvaranjem povratne sprege po stanju i
projektovanjem odgovarajućeg observera) ili direktno primenom metode podešavanja polova za model procesa koji je dat preko funkcije prenosa.
Servo-sistem (praćenje i l i regulacija referentnog signala) Servo-sistem je sistem kod koga se kontroler projektuje tako da se u izvesnom
smislu minimizira signal greške, koji predstavlja razliku izlaza procesa i nekog unapred zadanog referentnog signala. Ovaj problem se može rešiti pomoću zakona upravljanja oblika
t t t ct tS(z)
u e , e u yR(z)
= = −
Iako se, u principu, kontroler može odrediti na veoma mnogo različitih načina, pri projektovanju servo-sistema se najčešće zadaju parametri performanse izraženi preko karakterističnih veličina u vremenskom, frekvencijskom ili kompleksnom domenu (vreme uspona, preskok, vreme smirenja, pretek faze, pretek pojačanja, dominantni polovi itd.). U tom slučaju, rešenje je moguće odrediti pomoću kontrolera određene, unapred definisane strukture kao što je na primer integro-diferencijalni kompenzator ili linearni zakon upravljanja (PID).
Praćenje referentnog modela Zadatak praćenja referentnog modela
svodi se na zahtev da se kontroler projektuje tako da izlaz procesa u što je moguće većoj meri prati neku željenu trajektoriju koja je definisana referentnim modelom (Sl. 3-6). Rešenje ovako postavljenog dobija se određivanjem polinoma T(z), S(z) i R(z), a može se dobiti bilo preko modeliranja procesa u prostoru stanja, bilo preko U/I modela.
Optimalno upravljanje U slučaju kada se zadatak projektovanja svodi na smanjivanje odstupanja izlaza
procesa od neke željene trajektorije, problem se može rešiti i tako što će se definisati određeni kriterijum koji predstavlja meru odstupanja, pa se upravljanje određuje određivanjem polinoma T(z), S(z) i R(z) tako da se minimizira postavljeni kriterijum. Dobijeni kontroler predstavlja optimalno (najbolje) rešenje u odnosu na odabrani kriterijum.
Adapt ivno upravljanje U izvesnim situacijama postavljeni zadatak ne može da se ostvari pomoću
kontrolera koji ima konstantne parametre. Naime, kontroler se uvek projektuje za neki pretpostavljeni model procesa. Da bi se dobio jednostavniji model, koji će rezultovati i jednostavnim kontrolerom, često se zanemaruje brza dinamika procesa čiji efekti na ponašanje procesa ne traju dugo. Isto tako, model se najčešće linearizuje u okolini neke radne tačke. Imajući sve to u vidu, prirodno je očekivati da će u toku rada sistema, pri promeni radne tačke, projektovani kontroler postati neadekvatan. Otuda je neophodno da se kontroler menja – adaptira – u skladu sa promenama procesa. Ovako projektovano
SL. 3-4 ALGORITAM UPRAVLJANJA KOD PODEŠAVANJA POLOVA
SL. 3-5 SERVO-SISTEM
SL. 3-6 PRAĆENJE REFERENTNOG MODELA
S(z)R(z)
−
S(z)R(z)
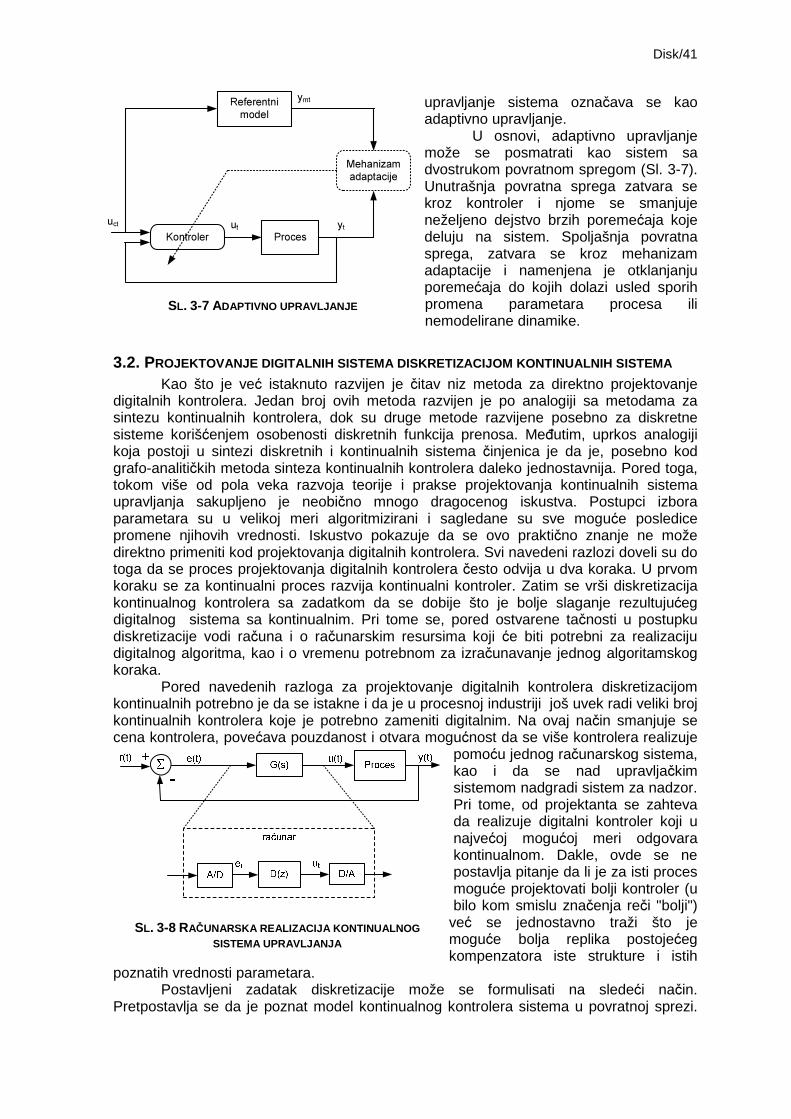
Disk/41
upravljanje sistema označava se kao adaptivno upravljanje.
U osnovi, adaptivno upravljanje može se posmatrati kao sistem sa dvostrukom povratnom spregom (Sl. 3-7). Unutrašnja povratna sprega zatvara se kroz kontroler i njome se smanjuje neželjeno dejstvo brzih poremećaja koje deluju na sistem. Spoljašnja povratna sprega, zatvara se kroz mehanizam adaptacije i namenjena je otklanjanju poremećaja do kojih dolazi usled sporih promena parametara procesa ili nemodelirane dinamike.
3.2. PROJEKTOVANJE DIGITALNIH SISTEMA DISKRETIZACIJOM KONTINUALNIH SISTE MA Kao što je već istaknuto razvijen je čitav niz metoda za direktno projektovanje
digitalnih kontrolera. Jedan broj ovih metoda razvijen je po analogiji sa metodama za sintezu kontinualnih kontrolera, dok su druge metode razvijene posebno za diskretne sisteme korišćenjem osobenosti diskretnih funkcija prenosa. Međutim, uprkos analogiji koja postoji u sintezi diskretnih i kontinualnih sistema činjenica je da je, posebno kod grafo-analitičkih metoda sinteza kontinualnih kontrolera daleko jednostavnija. Pored toga, tokom više od pola veka razvoja teorije i prakse projektovanja kontinualnih sistema upravljanja sakupljeno je neobično mnogo dragocenog iskustva. Postupci izbora parametara su u velikoj meri algoritmizirani i sagledane su sve moguće posledice promene njihovih vrednosti. Iskustvo pokazuje da se ovo praktično znanje ne može direktno primeniti kod projektovanja digitalnih kontrolera. Svi navedeni razlozi doveli su do toga da se proces projektovanja digitalnih kontrolera često odvija u dva koraka. U prvom koraku se za kontinualni proces razvija kontinualni kontroler. Zatim se vrši diskretizacija kontinualnog kontrolera sa zadatkom da se dobije što je bolje slaganje rezultujućeg digitalnog sistema sa kontinualnim. Pri tome se, pored ostvarene tačnosti u postupku diskretizacije vodi računa i o računarskim resursima koji će biti potrebni za realizaciju digitalnog algoritma, kao i o vremenu potrebnom za izračunavanje jednog algoritamskog koraka.
Pored navedenih razloga za projektovanje digitalnih kontrolera diskretizacijom kontinualnih potrebno je da se istakne i da je u procesnoj industriji još uvek radi veliki broj kontinualnih kontrolera koje je potrebno zameniti digitalnim. Na ovaj način smanjuje se cena kontrolera, povećava pouzdanost i otvara mogućnost da se više kontrolera realizuje
pomoću jednog računarskog sistema, kao i da se nad upravljačkim sistemom nadgradi sistem za nadzor. Pri tome, od projektanta se zahteva da realizuje digitalni kontroler koji u najvećoj mogućoj meri odgovara kontinualnom. Dakle, ovde se ne postavlja pitanje da li je za isti proces moguće projektovati bolji kontroler (u bilo kom smislu značenja reči "bolji")
već se jednostavno traži što je moguće bolja replika postojećeg kompenzatora iste strukture i istih
poznatih vrednosti parametara. Postavljeni zadatak diskretizacije može se formulisati na sledeći način.
Pretpostavlja se da je poznat model kontinualnog kontrolera sistema u povratnoj sprezi.
SL. 3-7 ADAPTIVNO UPRAVLJANJE
SL. 3-8 RAČUNARSKA REALIZACIJA KONTINUALNOG SISTEMA UPRAVLJANJA
Kontroler Proces
Referentni
model
ytutuct
ymt
Mehanizam
adaptacije
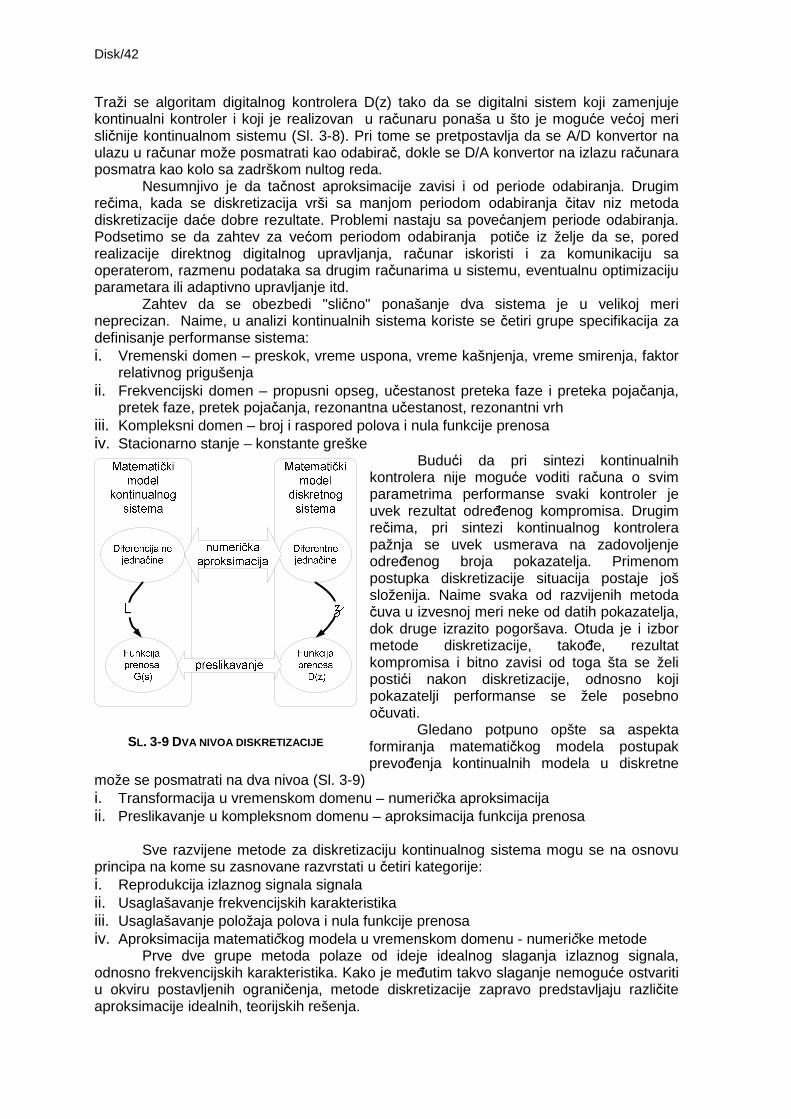
Disk/42
Traži se algoritam digitalnog kontrolera D(z) tako da se digitalni sistem koji zamenjuje kontinualni kontroler i koji je realizovan u računaru ponaša u što je moguće većoj meri sličnije kontinualnom sistemu (Sl. 3-8). Pri tome se pretpostavlja da se A/D konvertor na ulazu u računar može posmatrati kao odabirač, dokle se D/A konvertor na izlazu računara posmatra kao kolo sa zadrškom nultog reda.
Nesumnjivo je da tačnost aproksimacije zavisi i od periode odabiranja. Drugim rečima, kada se diskretizacija vrši sa manjom periodom odabiranja čitav niz metoda diskretizacije daće dobre rezultate. Problemi nastaju sa povećanjem periode odabiranja. Podsetimo se da zahtev za većom periodom odabiranja potiče iz želje da se, pored realizacije direktnog digitalnog upravljanja, računar iskoristi i za komunikaciju sa operaterom, razmenu podataka sa drugim računarima u sistemu, eventualnu optimizaciju parametara ili adaptivno upravljanje itd.
Zahtev da se obezbedi "slično" ponašanje dva sistema je u velikoj meri neprecizan. Naime, u analizi kontinualnih sistema koriste se četiri grupe specifikacija za definisanje performanse sistema: i. Vremenski domen – preskok, vreme uspona, vreme kašnjenja, vreme smirenja, faktor
relativnog prigušenja ii. Frekvencijski domen – propusni opseg, učestanost preteka faze i preteka pojačanja,
pretek faze, pretek pojačanja, rezonantna učestanost, rezonantni vrh iii. Kompleksni domen – broj i raspored polova i nula funkcije prenosa iv. Stacionarno stanje – konstante greške
Budući da pri sintezi kontinualnih kontrolera nije moguće voditi računa o svim parametrima performanse svaki kontroler je uvek rezultat određenog kompromisa. Drugim rečima, pri sintezi kontinualnog kontrolera pažnja se uvek usmerava na zadovoljenje određenog broja pokazatelja. Primenom postupka diskretizacije situacija postaje još složenija. Naime svaka od razvijenih metoda čuva u izvesnoj meri neke od datih pokazatelja, dok druge izrazito pogoršava. Otuda je i izbor metode diskretizacije, takođe, rezultat kompromisa i bitno zavisi od toga šta se želi postići nakon diskretizacije, odnosno koji pokazatelji performanse se žele posebno očuvati.
Gledano potpuno opšte sa aspekta formiranja matematičkog modela postupak prevođenja kontinualnih modela u diskretne
može se posmatrati na dva nivoa (Sl. 3-9) i. Transformacija u vremenskom domenu – numerička aproksimacija ii. Preslikavanje u kompleksnom domenu – aproksimacija funkcija prenosa
Sve razvijene metode za diskretizaciju kontinualnog sistema mogu se na osnovu
principa na kome su zasnovane razvrstati u četiri kategorije: i. Reprodukcija izlaznog signala signala ii. Usaglašavanje frekvencijskih karakteristika iii. Usaglašavanje položaja polova i nula funkcije prenosa iv. Aproksimacija matematičkog modela u vremenskom domenu - numeričke metode
Prve dve grupe metoda polaze od ideje idealnog slaganja izlaznog signala, odnosno frekvencijskih karakteristika. Kako je međutim takvo slaganje nemoguće ostvariti u okviru postavljenih ograničenja, metode diskretizacije zapravo predstavljaju različite aproksimacije idealnih, teorijskih rešenja.
SL. 3-9 DVA NIVOA DISKRETIZACIJE
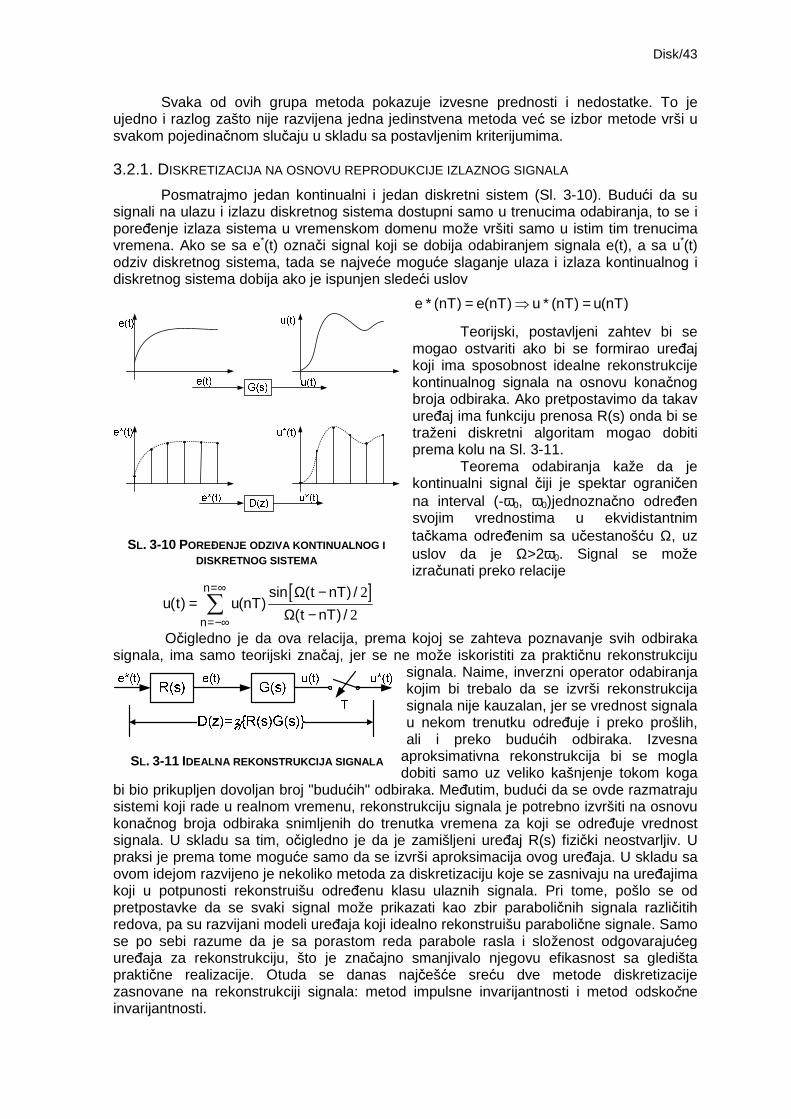
Disk/43
Svaka od ovih grupa metoda pokazuje izvesne prednosti i nedostatke. To je ujedno i razlog zašto nije razvijena jedna jedinstvena metoda već se izbor metode vrši u svakom pojedinačnom slučaju u skladu sa postavljenim kriterijumima.
3.2.1. DISKRETIZACIJA NA OSNOVU REPRODUKCIJE IZLAZNOG SIGNALA
Posmatrajmo jedan kontinualni i jedan diskretni sistem (Sl. 3-10). Budući da su signali na ulazu i izlazu diskretnog sistema dostupni samo u trenucima odabiranja, to se i poređenje izlaza sistema u vremenskom domenu može vršiti samo u istim tim trenucima vremena. Ako se sa e*(t) označi signal koji se dobija odabiranjem signala e(t), a sa u*(t) odziv diskretnog sistema, tada se najveće moguće slaganje ulaza i izlaza kontinualnog i diskretnog sistema dobija ako je ispunjen sledeći uslov
e * (nT) e(nT) u * (nT) u(nT)= ⇒ =
Teorijski, postavljeni zahtev bi se mogao ostvariti ako bi se formirao uređaj koji ima sposobnost idealne rekonstrukcije kontinualnog signala na osnovu konačnog broja odbiraka. Ako pretpostavimo da takav uređaj ima funkciju prenosa R(s) onda bi se traženi diskretni algoritam mogao dobiti prema kolu na Sl. 3-11.
Teorema odabiranja kaže da je kontinualni signal čiji je spektar ograničen na interval (-ω0, ω0)jednoznačno određen svojim vrednostima u ekvidistantnim tačkama određenim sa učestanošću Ω, uz uslov da je Ω>2ω0. Signal se može izračunati preko relacije
[ ]2
2
n
n
sin (t nT) /u(t) u(nT)
(t nT) /
=∞
=−∞
Ω −=
Ω −∑
Očigledno je da ova relacija, prema kojoj se zahteva poznavanje svih odbiraka signala, ima samo teorijski značaj, jer se ne može iskoristiti za praktičnu rekonstrukciju
signala. Naime, inverzni operator odabiranja kojim bi trebalo da se izvrši rekonstrukcija signala nije kauzalan, jer se vrednost signala u nekom trenutku određuje i preko prošlih, ali i preko budućih odbiraka. Izvesna
aproksimativna rekonstrukcija bi se mogla dobiti samo uz veliko kašnjenje tokom koga
bi bio prikupljen dovoljan broj "budućih" odbiraka. Međutim, budući da se ovde razmatraju sistemi koji rade u realnom vremenu, rekonstrukciju signala je potrebno izvršiti na osnovu konačnog broja odbiraka snimljenih do trenutka vremena za koji se određuje vrednost signala. U skladu sa tim, očigledno je da je zamišljeni uređaj R(s) fizički neostvarljiv. U praksi je prema tome moguće samo da se izvrši aproksimacija ovog uređaja. U skladu sa ovom idejom razvijeno je nekoliko metoda za diskretizaciju koje se zasnivaju na uređajima koji u potpunosti rekonstruišu određenu klasu ulaznih signala. Pri tome, pošlo se od pretpostavke da se svaki signal može prikazati kao zbir paraboličnih signala različitih redova, pa su razvijani modeli uređaja koji idealno rekonstruišu parabolične signale. Samo se po sebi razume da je sa porastom reda parabole rasla i složenost odgovarajućeg uređaja za rekonstrukciju, što je značajno smanjivalo njegovu efikasnost sa gledišta praktične realizacije. Otuda se danas najčešće sreću dve metode diskretizacije zasnovane na rekonstrukciji signala: metod impulsne invarijantnosti i metod odskočne invarijantnosti.
SL. 3-10 POREĐENJE ODZIVA KONTINUALNOG I DISKRETNOG SISTEMA
SL. 3-11 IDEALNA REKONSTRUKCIJA SIGNALA
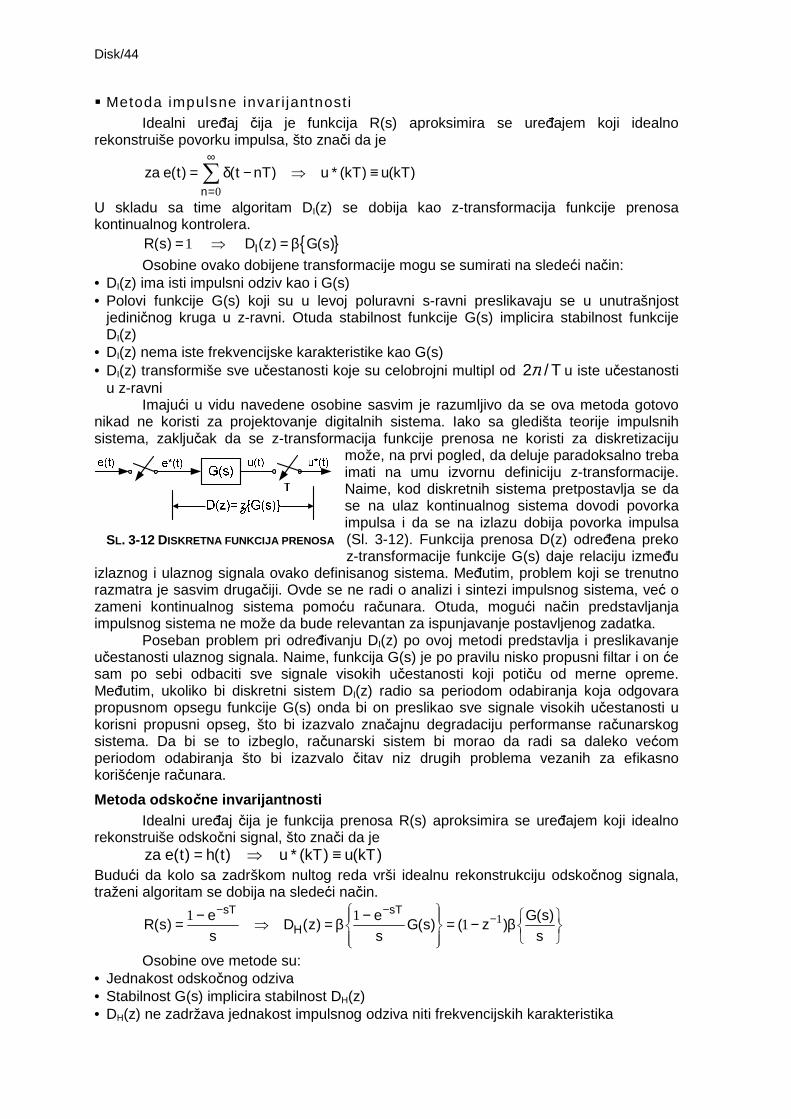
Disk/44
Metoda impulsne invari jantnost i Idealni uređaj čija je funkcija R(s) aproksimira se uređajem koji idealno
rekonstruiše povorku impulsa, što znači da je
0n
za e(t) (t nT) u * (kT) u(kT)∞
== δ − ⇒ ≡∑
U skladu sa time algoritam DI(z) se dobija kao z-transformacija funkcije prenosa kontinualnog kontrolera.
1 IR(s) D (z) G(s)= ⇒ = β
Osobine ovako dobijene transformacije mogu se sumirati na sledeći način: • DI(z) ima isti impulsni odziv kao i G(s) • Polovi funkcije G(s) koji su u levoj poluravni s-ravni preslikavaju se u unutrašnjost
jediničnog kruga u z-ravni. Otuda stabilnost funkcije G(s) implicira stabilnost funkcije DI(z)
• DI(z) nema iste frekvencijske karakteristike kao G(s) • DI(z) transformiše sve učestanosti koje su celobrojni multipl od T/2π u iste učestanosti
u z-ravni Imajući u vidu navedene osobine sasvim je razumljivo da se ova metoda gotovo
nikad ne koristi za projektovanje digitalnih sistema. Iako sa gledišta teorije impulsnih sistema, zaključak da se z-transformacija funkcije prenosa ne koristi za diskretizaciju
može, na prvi pogled, da deluje paradoksalno treba imati na umu izvornu definiciju z-transformacije. Naime, kod diskretnih sistema pretpostavlja se da se na ulaz kontinualnog sistema dovodi povorka impulsa i da se na izlazu dobija povorka impulsa (Sl. 3-12). Funkcija prenosa D(z) određena preko z-transformacije funkcije G(s) daje relaciju između
izlaznog i ulaznog signala ovako definisanog sistema. Međutim, problem koji se trenutno razmatra je sasvim drugačiji. Ovde se ne radi o analizi i sintezi impulsnog sistema, već o zameni kontinualnog sistema pomoću računara. Otuda, mogući način predstavljanja impulsnog sistema ne može da bude relevantan za ispunjavanje postavljenog zadatka.
Poseban problem pri određivanju DI(z) po ovoj metodi predstavlja i preslikavanje učestanosti ulaznog signala. Naime, funkcija G(s) je po pravilu nisko propusni filtar i on će sam po sebi odbaciti sve signale visokih učestanosti koji potiču od merne opreme. Međutim, ukoliko bi diskretni sistem DI(z) radio sa periodom odabiranja koja odgovara propusnom opsegu funkcije G(s) onda bi on preslikao sve signale visokih učestanosti u korisni propusni opseg, što bi izazvalo značajnu degradaciju performanse računarskog sistema. Da bi se to izbeglo, računarski sistem bi morao da radi sa daleko većom periodom odabiranja što bi izazvalo čitav niz drugih problema vezanih za efikasno korišćenje računara.
Metoda odskočne invarijantnosti Idealni uređaj čija je funkcija prenosa R(s) aproksimira se uređajem koji idealno
rekonstruiše odskočni signal, što znači da je )kT(u)kT(*u)t(h)t(eza ≡⇒=
Budući da kolo sa zadrškom nultog reda vrši idealnu rekonstrukciju odskočnog signala, traženi algoritam se dobija na sledeći način.
11 11
sT sT
He e G(s)
R(s) D (z) G(s) ( z )s s s
− −− − − = ⇒ = β = − β
Osobine ove metode su: • Jednakost odskočnog odziva • Stabilnost G(s) implicira stabilnost DH(z) • DH(z) ne zadržava jednakost impulsnog odziva niti frekvencijskih karakteristika
SL. 3-12 DISKRETNA FUNKCIJA PRENOSA
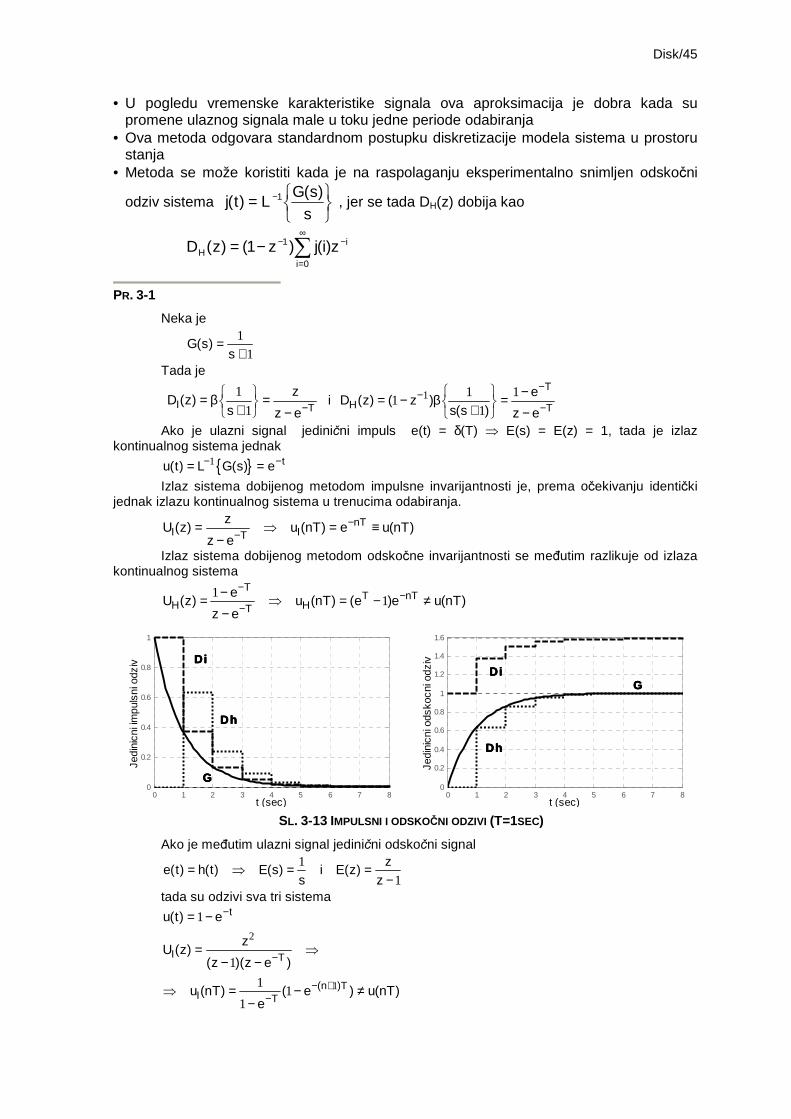
Disk/45
• U pogledu vremenske karakteristike signala ova aproksimacija je dobra kada su promene ulaznog signala male u toku jedne periode odabiranja
• Ova metoda odgovara standardnom postupku diskretizacije modela sistema u prostoru stanja
• Metoda se može koristiti kada je na raspolaganju eksperimentalno snimljen odskočni
odziv sistema
= −
s)s(G
)t(j 1L , jer se tada DH(z) dobija kao
∑∞
=
−−−=0i
i1H z)i(j)z1()z(D
PR. 3-1
Neka je 1
1G(s)
s=
+
Tada je
1
1I T
zD (z)
s z e− = β = + −
i 1 1 11
1
T
H Te
D (z) ( z )s(s ) z e
−−
− −= − β = + −
Ako je ulazni signal jedinični impuls e(t) = δ(T) ⇒ E(s) = E(z) = 1, tada je izlaz kontinualnog sistema jednak
1 tu(t) L G(s) e− −= =
Izlaz sistema dobijenog metodom impulsne invarijantnosti je, prema očekivanju identički jednak izlazu kontinualnog sistema u trenucima odabiranja.
nTI IT
zU (z) u (nT) e u(nT)
z e−
−= ⇒ = ≡
−
Izlaz sistema dobijenog metodom odskočne invarijantnosti se međutim razlikuje od izlaza kontinualnog sistema
11
TT nT
H HTe
U (z) u (nT) (e )e u(nT)z e
−−
−−= ⇒ = − ≠−
Ako je međutim ulazni signal jedinični odskočni signal 1
1
ze(t) h(t) E(s) i E(z)
s z= ⇒ = =
−
tada su odzivi sva tri sistema
1 tu(t) e−= − 2
1
1
11
1
I T
(n )TI T
zU (z)
(z )(z e )
u (nT) ( e ) u(nT)e
−
− +−
= ⇒
− −
⇒ = − ≠−
t (sec)
Jedi
nicn
i im
puls
ni o
dziv
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
GGGG
DiDiDiDi
DhDhDhDh
t (sec)
Jedi
nicn
i ods
kocn
i odz
iv
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
DiDiDiDi
DhDhDhDh
GGGG
SL. 3-13 IMPULSNI I ODSKOČNI ODZIVI (T=1SEC)
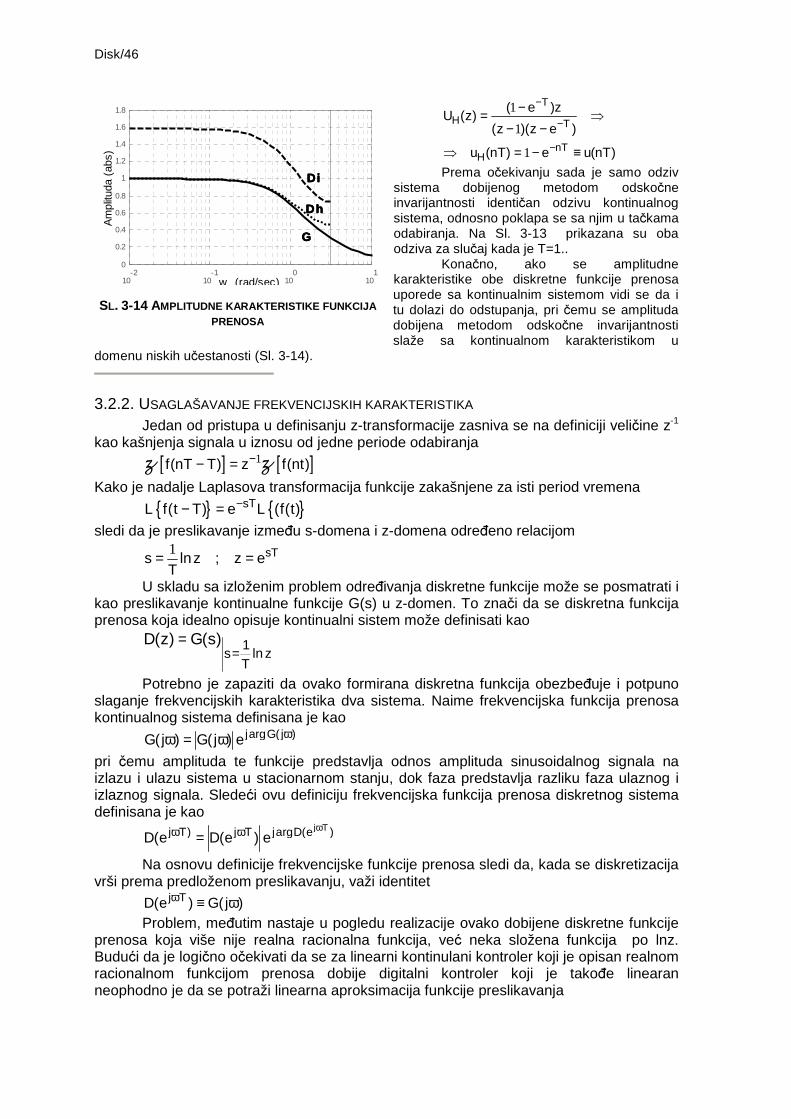
Disk/46
1
1
1
T
H T
nTH
( e )zU (z)
(z )(z e )
u (nT) e u(nT)
−
−
−
−= ⇒
− −
⇒ = − ≡
Prema očekivanju sada je samo odziv sistema dobijenog metodom odskočne invarijantnosti identičan odzivu kontinualnog sistema, odnosno poklapa se sa njim u tačkama odabiranja. Na Sl. 3-13 prikazana su oba odziva za slučaj kada je T=1..
Konačno, ako se amplitudne karakteristike obe diskretne funkcije prenosa uporede sa kontinualnim sistemom vidi se da i tu dolazi do odstupanja, pri čemu se amplituda dobijena metodom odskočne invarijantnosti slaže sa kontinualnom karakteristikom u
domenu niskih učestanosti (Sl. 3-14).
3.2.2. USAGLAŠAVANJE FREKVENCIJSKIH KARAKTERISTIKA Jedan od pristupa u definisanju z-transformacije zasniva se na definiciji veličine z-1
kao kašnjenja signala u iznosu od jedne periode odabiranja
[ ] [ ]1f(nT T) z f(nt)−− =z z
Kako je nadalje Laplasova transformacija funkcije zakašnjene za isti period vremena
sTf(t T) e (f(t)−− =L L
sledi da je preslikavanje između s-domena i z-domena određeno relacijom 1 sTs lnz ; z eT
= =
U skladu sa izloženim problem određivanja diskretne funkcije može se posmatrati i kao preslikavanje kontinualne funkcije G(s) u z-domen. To znači da se diskretna funkcija prenosa koja idealno opisuje kontinualni sistem može definisati kao
zlnT1
s)s(G)z(D
==
Potrebno je zapaziti da ovako formirana diskretna funkcija obezbeđuje i potpuno slaganje frekvencijskih karakteristika dva sistema. Naime frekvencijska funkcija prenosa kontinualnog sistema definisana je kao
jargG( j )G(j ) G(j ) e ωω = ω
pri čemu amplituda te funkcije predstavlja odnos amplituda sinusoidalnog signala na izlazu i ulazu sistema u stacionarnom stanju, dok faza predstavlja razliku faza ulaznog i izlaznog signala. Sledeći ovu definiciju frekvencijska funkcija prenosa diskretnog sistema definisana je kao
j Tj T) j T jargD(e )D(e D(e ) eωω ω=
Na osnovu definicije frekvencijske funkcije prenosa sledi da, kada se diskretizacija vrši prema predloženom preslikavanju, važi identitet
j TD(e ) G( j )ω ≡ ω Problem, međutim nastaje u pogledu realizacije ovako dobijene diskretne funkcije
prenosa koja više nije realna racionalna funkcija, već neka složena funkcija po lnz. Budući da je logično očekivati da se za linearni kontinulani kontroler koji je opisan realnom racionalnom funkcijom prenosa dobije digitalni kontroler koji je takođe linearan neophodno je da se potraži linearna aproksimacija funkcije preslikavanja
SL. 3-14 AMPLITUDNE KARAKTERISTIKE FUNKCIJA PRENOSA
w (rad/sec)10-2
10-1
100
101
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8A
mpl
ituda
(ab
s)
GGGG
DiDiDiDi
DhDhDhDh

Disk/47
f s f(z)D (z) G(s) ==
gde je f(z) aproksimacija funkcije 1/T(lnz). Samo se po sebi razume da bilo koja aproksimacija funkcije f(z) neće dovesti do
idealnog slaganja frekvencijskih karakteristika. Pri tome treba razlikovati dva slučaja. Ako se preslikavanjem, imaginarna osa s-ravni (s=jω) preslikava u jedinični krug z-ravni (z=ejωT) onda frekvencijska funkcija prenosa Df(e
jωT) poprima sve vrednosti amplitude i faze koje ima i kontinualna funkcija prenosa ali pri drugačijim vrednostima učestanosti. Ako se međutim imaginarna osa preslikava u neku drugu krivu u z-ravni onda amplituda i faza funkcije Df(e
jωT) koja se računa na tačkama duž jediničnog kruga nema nužno bilo kakvu vezu sa amplitudom i fazom kontinualne funkcije prenosa (Sl. 3-15).
SL. 3-15 PRESLIKAVANJE FREKVENCIJSKIH KARAKTERISTIKA
Metode diskretizacije dobijene na osnovu preslikavanja s-domena u z-domen dele se u dve grupe: aproksimacija logaritamske funkcije i aproksimacija eksponencijalne funkcije
Aproksimacija logaritamske funkcije Kao ilustraciju ideje aproksimacije logaritamske funkcije posmatraćemo sledeću
aproksimaciju 3 5 1
1
12
3 5 1
r r zlnz (r ) ; r
z
−
−−= + + + =+
L
Tada je 1
1 33 5 1
1 4 1
2 3 45 2 212
3 5
T T r T T zs ( r )
r rr r z(r )
−−
−+= = − − − ≈ =−+ + +
L
L
2 2 1 22
2 1 2
1 2 1 10
4 3 12 1
T T z zs ( )
r ( z )
− −−
−+ +≈ − =
−
3 1 23
1 32 1
T z zs
( z )
− −−
−+≈
−
itd. Očigledno je da se zamenom ovih izraza u funkciju G(s) može dobiti realna racionalna funkcija D(z). Problem je jedino u tome što je dobijena diskretna funkcija značajno većeg reda. Uprkos tome ova metoda se primenjuje u nekim problemima vezanim za obradu signala i to onda kada je slaganje frekvencijskih karakteristika od presudne važnosti za
0 0j T j Te eω ω=
11 0
j T( j ) e ωϕ ω =
22 0
j T( j ) Me ωϕ ω =
00
j TD(e ) G(j )ω = ω
11 0
j TfD (e ) G(j )ω = ω
22 0
j TfD (Me ) G(j )ω = ω
1i iz f (s) (s)−= = ϕ)j(G 0ω
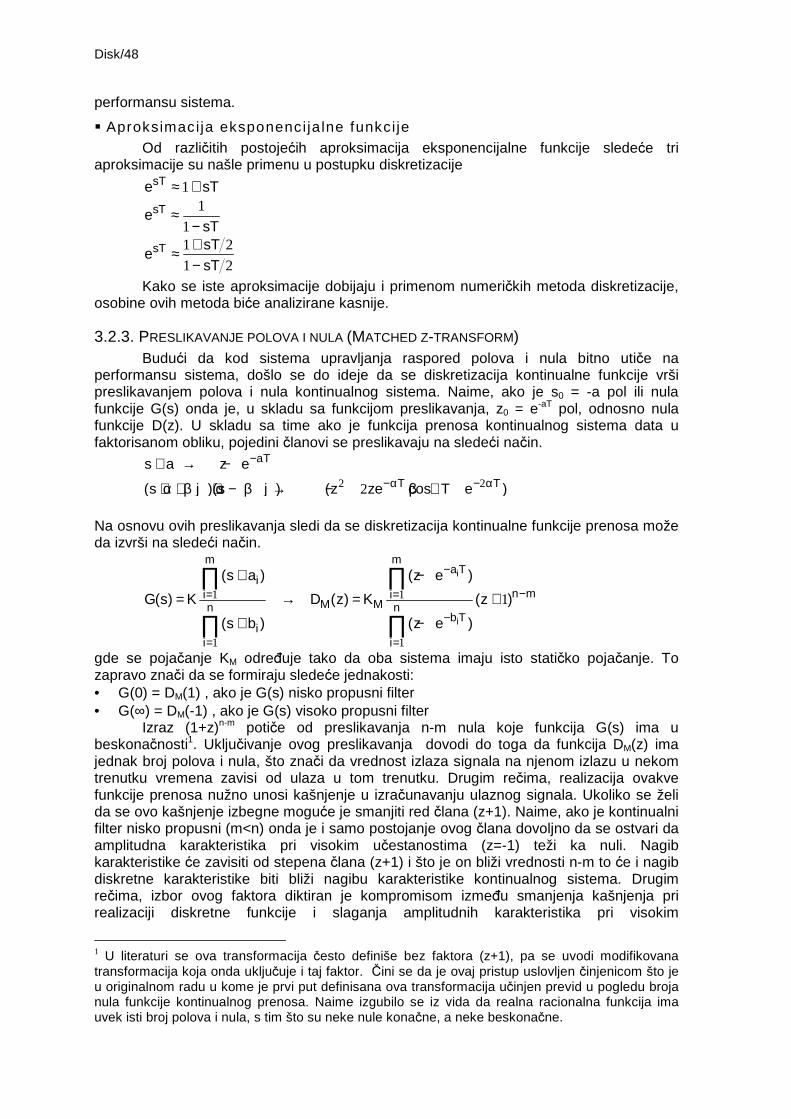
Disk/48
performansu sistema.
Aproksimacija eksponencija lne funkcije Od različitih postojećih aproksimacija eksponencijalne funkcije sledeće tri
aproksimacije su našle primenu u postupku diskretizacije
1sTe sT≈ + 1
1sTe
sT≈
−
1 2
1 2sT sT
esT
+≈−
Kako se iste aproksimacije dobijaju i primenom numeričkih metoda diskretizacije, osobine ovih metoda biće analizirane kasnije.
3.2.3. PRESLIKAVANJE POLOVA I NULA (MATCHED Z-TRANSFORM) Budući da kod sistema upravljanja raspored polova i nula bitno utiče na performansu sistema, došlo se do ideje da se diskretizacija kontinualne funkcije vrši preslikavanjem polova i nula kontinualnog sistema. Naime, ako je s0 = -a pol ili nula funkcije G(s) onda je, u skladu sa funkcijom preslikavanja, z0 = e-aT pol, odnosno nula funkcije D(z). U skladu sa time ako je funkcija prenosa kontinualnog sistema data u faktorisanom obliku, pojedini članovi se preslikavaju na sledeći način.
aTs a z e−+ → − 2 22 T T(s j )(s j ) (z ze cos T e )−α − α+ α + β + α − β → − β +
Na osnovu ovih preslikavanja sledi da se diskretizacija kontinualne funkcije prenosa može da izvrši na sledeći način.
1 1
1 1
1
i
i
m ma T
in mi i
M Mn nb T
ii i
(s a ) (z e )
G(s) K D (z) K (z )
(s b ) (z e )
−
−= =
−
= =
+ −
= → = +
+ −
∏ ∏
∏ ∏
gde se pojačanje KM određuje tako da oba sistema imaju isto statičko pojačanje. To zapravo znači da se formiraju sledeće jednakosti: • G(0) = DM(1) , ako je G(s) nisko propusni filter • G(∞) = DM(-1) , ako je G(s) visoko propusni filter
Izraz (1+z)n-m potiče od preslikavanja n-m nula koje funkcija G(s) ima u beskonačnosti1. Uključivanje ovog preslikavanja dovodi do toga da funkcija DM(z) ima jednak broj polova i nula, što znači da vrednost izlaza signala na njenom izlazu u nekom trenutku vremena zavisi od ulaza u tom trenutku. Drugim rečima, realizacija ovakve funkcije prenosa nužno unosi kašnjenje u izračunavanju ulaznog signala. Ukoliko se želi da se ovo kašnjenje izbegne moguće je smanjiti red člana (z+1). Naime, ako je kontinualni filter nisko propusni (m<n) onda je i samo postojanje ovog člana dovoljno da se ostvari da amplitudna karakteristika pri visokim učestanostima (z=-1) teži ka nuli. Nagib karakteristike će zavisiti od stepena člana (z+1) i što je on bliži vrednosti n-m to će i nagib diskretne karakteristike biti bliži nagibu karakteristike kontinualnog sistema. Drugim rečima, izbor ovog faktora diktiran je kompromisom između smanjenja kašnjenja pri realizaciji diskretne funkcije i slaganja amplitudnih karakteristika pri visokim
1 U literaturi se ova transformacija često definiše bez faktora (z+1), pa se uvodi modifikovana transformacija koja onda uključuje i taj faktor. Čini se da je ovaj pristup uslovljen činjenicom što je u originalnom radu u kome je prvi put definisana ova transformacija učinjen previd u pogledu broja nula funkcije kontinualnog prenosa. Naime izgubilo se iz vida da realna racionalna funkcija ima uvek isti broj polova i nula, s tim što su neke nule konačne, a neke beskonačne.
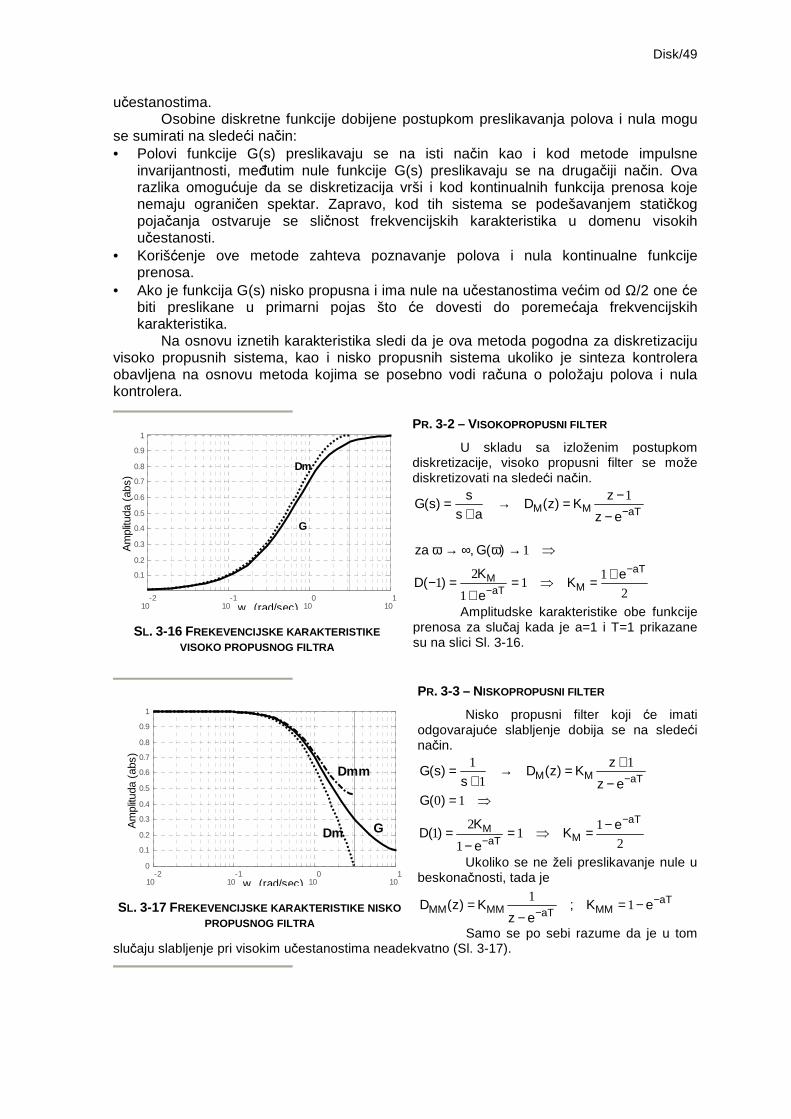
Disk/49
učestanostima. Osobine diskretne funkcije dobijene postupkom preslikavanja polova i nula mogu
se sumirati na sledeći način: • Polovi funkcije G(s) preslikavaju se na isti način kao i kod metode impulsne
invarijantnosti, međutim nule funkcije G(s) preslikavaju se na drugačiji način. Ova razlika omogućuje da se diskretizacija vrši i kod kontinualnih funkcija prenosa koje nemaju ograničen spektar. Zapravo, kod tih sistema se podešavanjem statičkog pojačanja ostvaruje se sličnost frekvencijskih karakteristika u domenu visokih učestanosti.
• Korišćenje ove metode zahteva poznavanje polova i nula kontinualne funkcije prenosa.
• Ako je funkcija G(s) nisko propusna i ima nule na učestanostima većim od Ω/2 one će biti preslikane u primarni pojas što će dovesti do poremećaja frekvencijskih karakteristika.
Na osnovu iznetih karakteristika sledi da je ova metoda pogodna za diskretizaciju visoko propusnih sistema, kao i nisko propusnih sistema ukoliko je sinteza kontrolera obavljena na osnovu metoda kojima se posebno vodi računa o položaju polova i nula kontrolera.
PR. 3-2 – VISOKOPROPUSNI FILTER
U skladu sa izloženim postupkom diskretizacije, visoko propusni filter se može diskretizovati na sledeći način.
1M M aT
s zG(s) D (z) K
s a z e−−= → =
+ −
1
2 11 1
21
aTM
MaT
za , G( )
K eD( ) K
e
−
−
ω → ∞ ω → ⇒
+− = = ⇒ =+
Amplitudske karakteristike obe funkcije prenosa za slučaj kada je a=1 i T=1 prikazane su na slici Sl. 3-16.
PR. 3-3 – NISKOPROPUSNI FILTER
Nisko propusni filter koji će imati odgovarajuće slabljenje dobija se na sledeći način.
1 1
1 M M aT
zG(s) D (z) K
s z e−+= → =
+ −
0 1
2 11 1
21
aTM
MaT
G( )
K eD( ) K
e
−
−
= ⇒
−= = ⇒ =−
Ukoliko se ne želi preslikavanje nule u beskonačnosti, tada je
11 aT
MM MM MMaTD (z) K ; K e
z e−
−= = −
−
Samo se po sebi razume da je u tom slučaju slabljenje pri visokim učestanostima neadekvatno (Sl. 3-17).
SL. 3-16 FREKEVENCIJSKE KARAKTERISTIKE VISOKO PROPUSNOG FILTRA
SL. 3-17 FREKEVENCIJSKE KARAKTERISTIKE NISKO PROPUSNOG FILTRA
w (rad/sec)10-2
10-1
100
101
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Am
plitu
da (
abs)
Dm
G
w (rad/sec)
Am
plitu
da (
abs)
10-2
10-1
100
101
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
GDm
Dmm
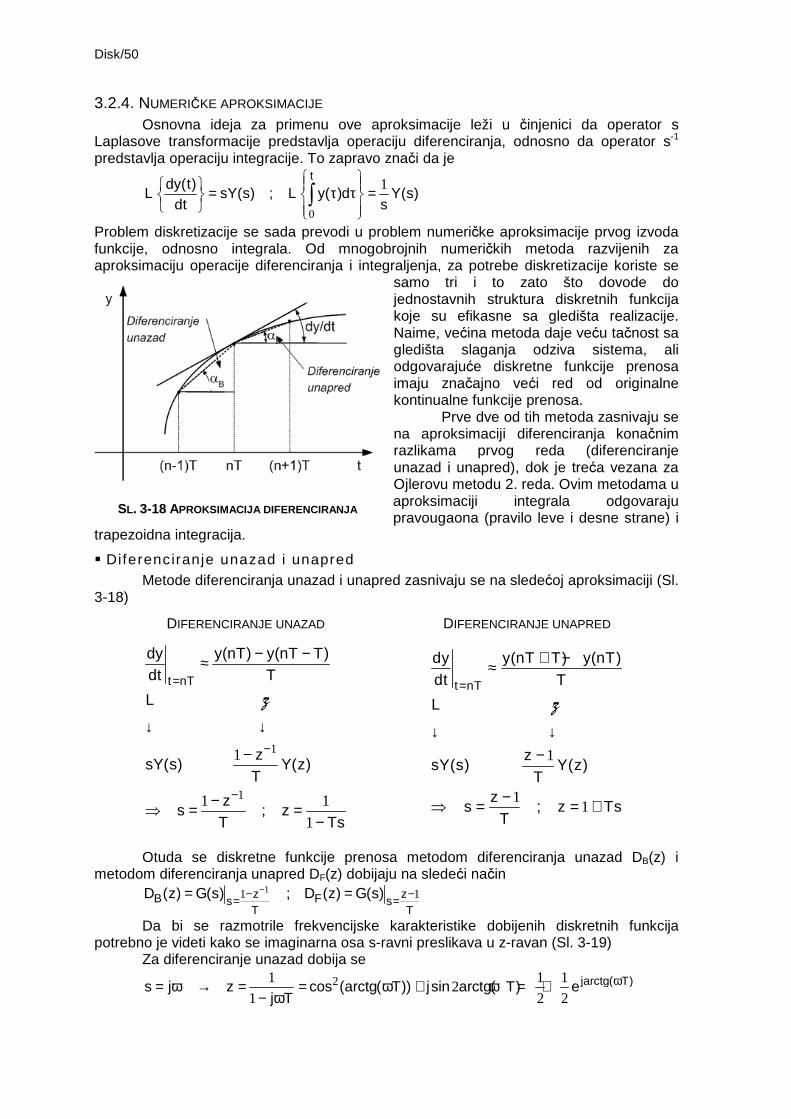
Disk/50
3.2.4. NUMERIČKE APROKSIMACIJE Osnovna ideja za primenu ove aproksimacije leži u činjenici da operator s
Laplasove transformacije predstavlja operaciju diferenciranja, odnosno da operator s-1 predstavlja operaciju integracije. To zapravo znači da je
0
1t
dy(t)sY(s) ; y( )d Y(s)
dt s
= τ τ =
∫L L
Problem diskretizacije se sada prevodi u problem numeričke aproksimacije prvog izvoda funkcije, odnosno integrala. Od mnogobrojnih numeričkih metoda razvijenih za aproksimaciju operacije diferenciranja i integraljenja, za potrebe diskretizacije koriste se
samo tri i to zato što dovode do jednostavnih struktura diskretnih funkcija koje su efikasne sa gledišta realizacije. Naime, većina metoda daje veću tačnost sa gledišta slaganja odziva sistema, ali odgovarajuće diskretne funkcije prenosa imaju značajno veći red od originalne kontinualne funkcije prenosa.
Prve dve od tih metoda zasnivaju se na aproksimaciji diferenciranja konačnim razlikama prvog reda (diferenciranje unazad i unapred), dok je treća vezana za Ojlerovu metodu 2. reda. Ovim metodama u aproksimaciji integrala odgovaraju pravougaona (pravilo leve i desne strane) i
trapezoidna integracija.
Diferenciranje unazad i unapred Metode diferenciranja unazad i unapred zasnivaju se na sledećoj aproksimaciji (Sl.
3-18)
DIFERENCIRANJE UNAZAD DIFERENCIRANJE UNAPRED
1
1
1
1 1
1
t nT
dy y(nT) y(nT T)dt T
zsY(s) Y(z)
T
zs ; z
T Ts
=
−
−
− −≈
↓ ↓
−
−⇒ = =
−
zL
1
11
t nT
dy y(nT T) y(nT)dt T
zsY(s) Y(z)
Tz
s ; z TsT
=
+ −≈
↓ ↓−
−⇒ = = +
zL
Otuda se diskretne funkcije prenosa metodom diferenciranja unazad DB(z) i
metodom diferenciranja unapred DF(z) dobijaju na sledeći način 11 1z zB Fs s
T TD (z) G(s) ; D (z) G(s)−− −= == =
Da bi se razmotrile frekvencijske karakteristike dobijenih diskretnih funkcija potrebno je videti kako se imaginarna osa s-ravni preslikava u z-ravan (Sl. 3-19)
Za diferenciranje unazad dobija se 21 1 1
21 2 2
jarctg( T)s j z cos (arctg( T)) jsin arctg( T) ej T
ω= ω → = = ω + ω = +− ω
SL. 3-18 APROKSIMACIJA DIFERENCIRANJA

Disk/51
što znači da se imaginarna osa preslikava u krug poluprečnika ½ sa centrom u z= ½. Za diferenciranje unapred imaginarna osa se preslikava u pravu liniju paralelnu imaginarnoj osi u z-ravni na rastojanju z=1.
1s j z j T= ω → = + ω
SL. 3-19 PRESLIKAVANJE FREKVENCIJSKIH KARAKTERISTIKA KOD DIFE RENCIRANJA UNAZAD I UNAPRED
Očigledno je da u oba slučaja dolazi do degradacije frekvencijskih karakteristika jer slika imaginarne ose s-ravni značajno odstupa od jediničnog kruga. Izvesno slaganje se može očekivati jedino u domenu niskih učestanosti gde je ovo odstupanje relativno malo. Opseg učestanosti u kome se može očekivati relativno slaganje se može povećati smanjivanjem periode odabiranja. Ovaj zaključak je sasvim očekivan, jer je aproksimacija diferenciranja utoliko tačnija ukoliko je perioda odabiranja manja.
Potrebno je zapaziti da diferenciranje unapred ima još jednu negativnu osobinu. Naime, budući da se leva poluravan s-ravni preslikava u područje levo od prave z=1, to ova metoda diskretizacije ne može garantovati da će stabilni kontinualni sistem, nakon diskretizacije ostati i dalje stabilan. Za razliku od nje, diferenciranje unazad preslikava levu poluravan s-ravni u unutrašnjost jediničnog kruga z-ravni, čime je zagarantovano očuvanje stabilnosti.
Osnovna prednost obe ove metode sastoji se u jednostavnosti njihove primene i jednostavnoj strukturi rezultujuće diskretne funkcije prenosa. Pri tome se s obzirom na moguće probleme oko stabilnosti diferenciranje unapred ređe koristi.
Potrebno je da se istakne da se dobijeni rezultati mogu interpretirati i na drugi način. Naime i jedna i druga transformacija mogu se shvatiti kao dve aproksimacije eksponencijalne funkcije.
11
1sT sTe ili e sT
st≈ ≈ +
−
PR. 3-4
Posmatra se kontinualna funkcija prenosa G(s) i diskretizovane funkcije dobijene primenom diferenciranja unazad i unapred.
1
1 1 1 1B FTz T
G(s) D (z) ; D (z)s z( T) z ( T)
= → = =+ + − − −
Impulsni i odskočni odziv pokazuje izuzetno slabo slaganje sa odzivom kontinualnog sistema, što je logična posledica relativno grube aproksimacije prvog izvoda (Sl. 3-20). Nadalje, Na
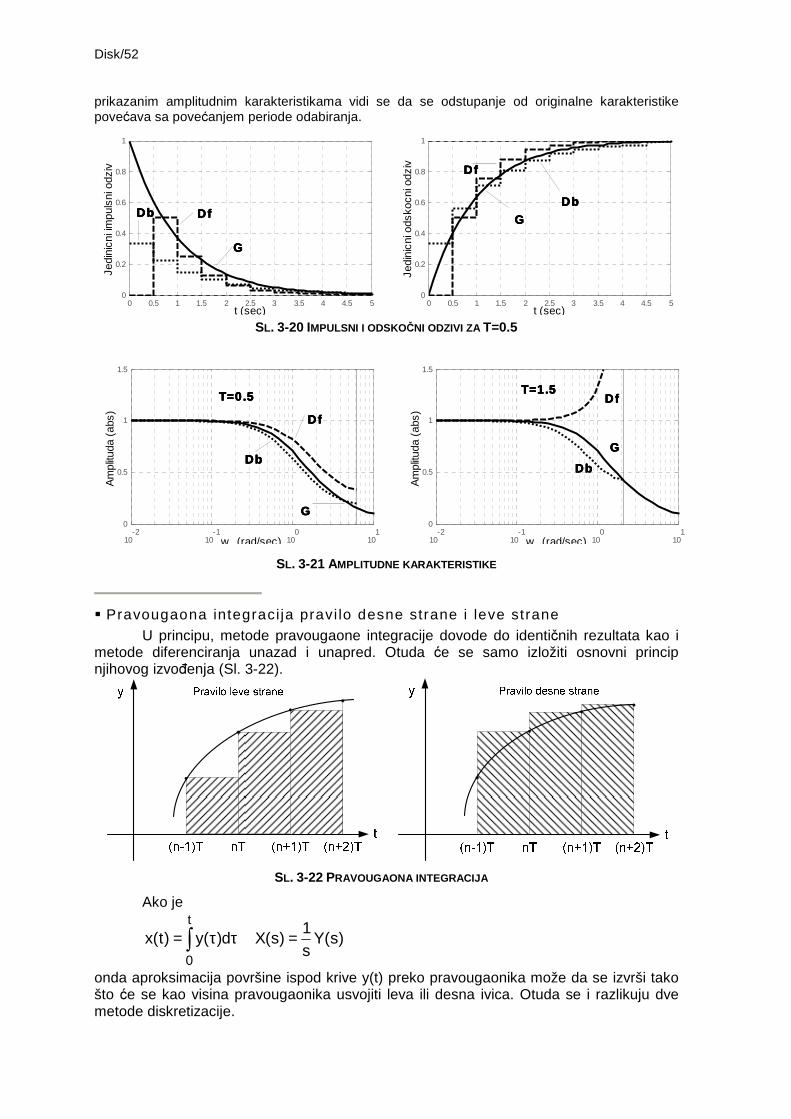
Disk/52
prikazanim amplitudnim karakteristikama vidi se da se odstupanje od originalne karakteristike povećava sa povećanjem periode odabiranja.
SL. 3-20 IMPULSNI I ODSKOČNI ODZIVI ZA T=0.5
SL. 3-21 AMPLITUDNE KARAKTERISTIKE
Pravougaona integracija pravi lo desne strane i leve strane
U principu, metode pravougaone integracije dovode do identičnih rezultata kao i metode diferenciranja unazad i unapred. Otuda će se samo izložiti osnovni princip njihovog izvođenja (Sl. 3-22).
Ako je
)s(Ys1
)s(Xd)(y)t(xt
0
=ττ= ∫
onda aproksimacija površine ispod krive y(t) preko pravougaonika može da se izvrši tako što će se kao visina pravougaonika usvojiti leva ili desna ivica. Otuda se i razlikuju dve metode diskretizacije.
t (sec)
Jedi
nicn
i im
puls
ni o
dziv
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
GGGG
DfDfDfDfDbDbDbDb
t (sec)
Jedi
nicn
i ods
kocn
i odz
iv
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
DbDbDbDb
GGGG
DfDfDfDf
SL. 3-22 PRAVOUGAONA INTEGRACIJA
w (rad/sec)
Am
plitu
da (
abs)
10-2
10-1
100
101
0
0.5
1
1.5
DfDfDfDf
GGGG
DbDbDbDb
T=0.5T=0.5T=0.5T=0.5
w (rad/sec)
Am
plitu
da (
abs)
10-2
10-1
100
101
0
0.5
1
1.5
GGGG
T=1.5T=1.5T=1.5T=1.5
DbDbDbDb
DfDfDfDf
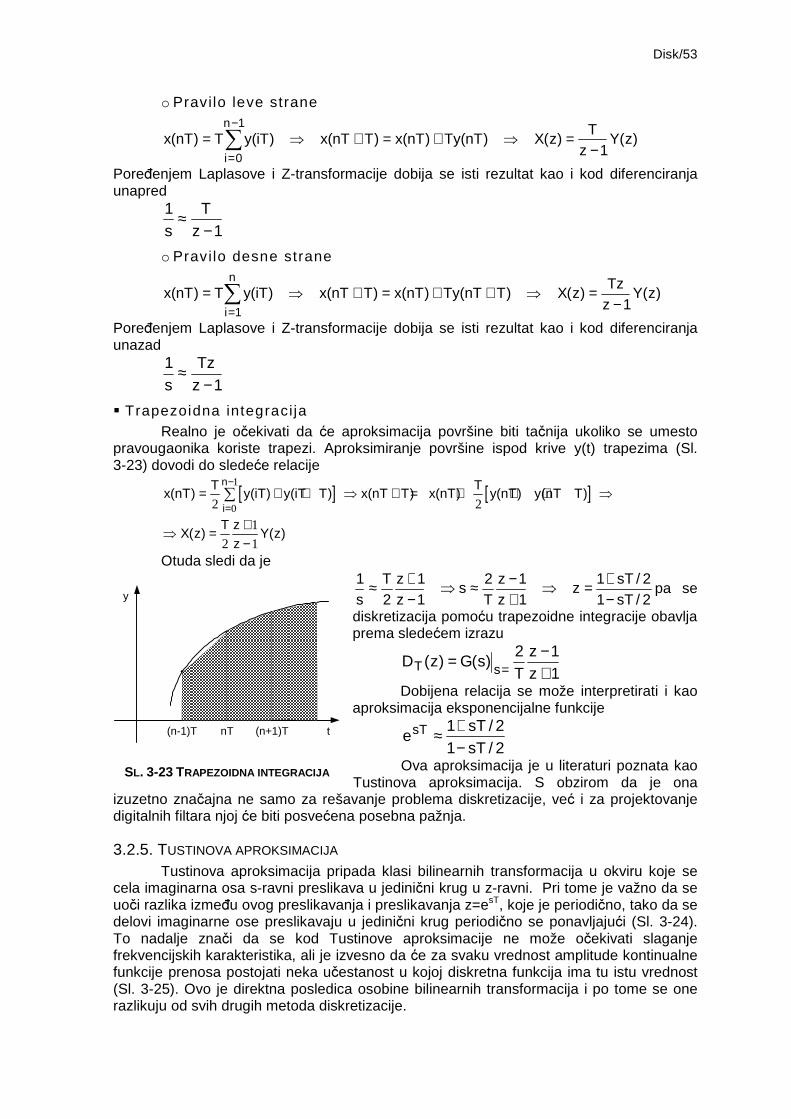
Disk/53
o Pravilo leve strane
)z(Y1z
T)z(X)nT(Ty)nT(x)TnT(x)iT(yT)nT(x
1n
0i −=⇒+=+⇒= ∑
−
=
Poređenjem Laplasove i Z-transformacije dobija se isti rezultat kao i kod diferenciranja unapred
1zT
s1
−≈
o Pravilo desne strane
)z(Y1z
Tz)z(X)TnT(Ty)nT(x)TnT(x)iT(yT)nT(x
n
1i −=⇒++=+⇒= ∑
=
Poređenjem Laplasove i Z-transformacije dobija se isti rezultat kao i kod diferenciranja unazad
1zTz
s1
−≈
Trapezoidna integracija Realno je očekivati da će aproksimacija površine biti tačnija ukoliko se umesto
pravougaonika koriste trapezi. Aproksimiranje površine ispod krive y(t) trapezima (Sl. 3-23) dovodi do sledeće relacije
[ ] [ ]1
02 2
1
2 1
n
i
T Tx(nT) y(iT) y(iT T) x(nT T) x(nT) y(nT) y(nT T)
T zX(z) Y(z)
z
−
== + + ⇒ + = + + + ⇒
+⇒ =
−
∑
Otuda sledi da je
2/sT12/sT1
z1z1z
T2
s1z1z
2T
s1
−+=⇒
+−≈⇒
−+≈ pa se
diskretizacija pomoću trapezoidne integracije obavlja prema sledećem izrazu
1z1z
T2
)s(G)z(D sT +−= =
Dobijena relacija se može interpretirati i kao aproksimacija eksponencijalne funkcije
2/sT12/sT1
esT
−+≈
Ova aproksimacija je u literaturi poznata kao Tustinova aproksimacija. S obzirom da je ona
izuzetno značajna ne samo za rešavanje problema diskretizacije, već i za projektovanje digitalnih filtara njoj će biti posvećena posebna pažnja.
3.2.5. TUSTINOVA APROKSIMACIJA Tustinova aproksimacija pripada klasi bilinearnih transformacija u okviru koje se
cela imaginarna osa s-ravni preslikava u jedinični krug u z-ravni. Pri tome je važno da se uoči razlika između ovog preslikavanja i preslikavanja z=esT, koje je periodično, tako da se delovi imaginarne ose preslikavaju u jedinični krug periodično se ponavljajući (Sl. 3-24). To nadalje znači da se kod Tustinove aproksimacije ne može očekivati slaganje frekvencijskih karakteristika, ali je izvesno da će za svaku vrednost amplitude kontinualne funkcije prenosa postojati neka učestanost u kojoj diskretna funkcija ima tu istu vrednost (Sl. 3-25). Ovo je direktna posledica osobine bilinearnih transformacija i po tome se one razlikuju od svih drugih metoda diskretizacije.
SL. 3-23 TRAPEZOIDNA INTEGRACIJA
tnT(n-1)T (n+1)T
y
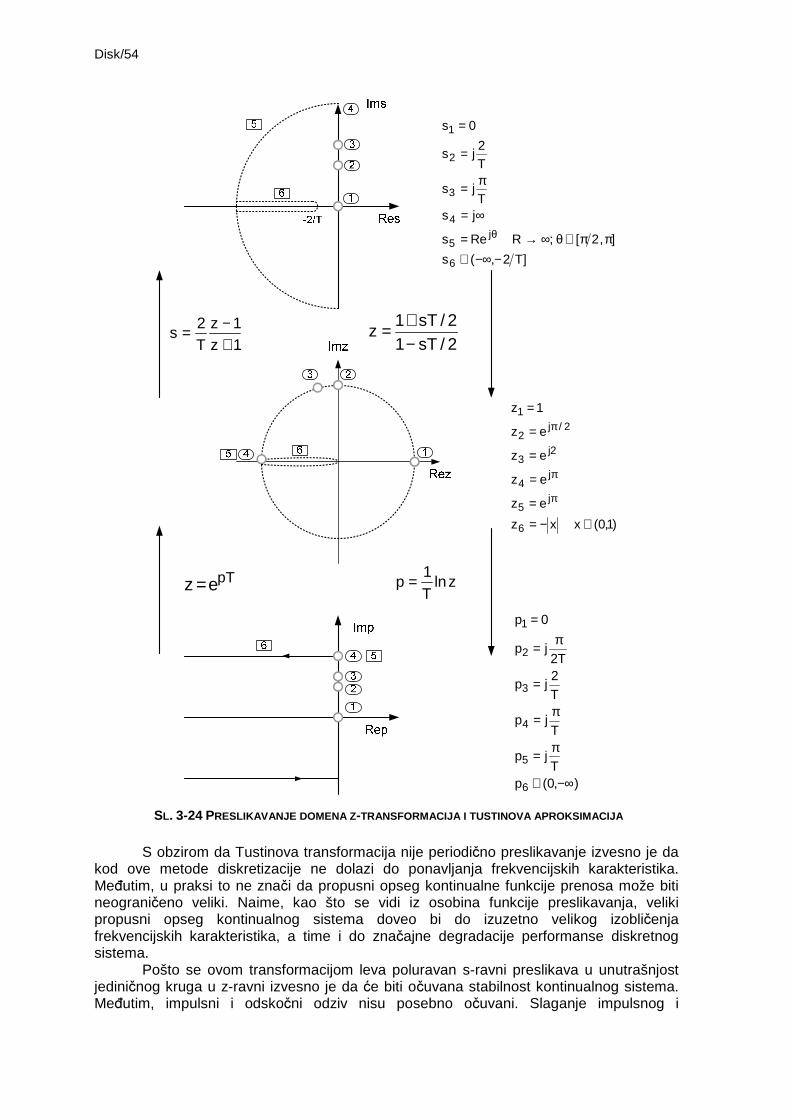
Disk/54
S obzirom da Tustinova transformacija nije periodično preslikavanje izvesno je da kod ove metode diskretizacije ne dolazi do ponavljanja frekvencijskih karakteristika. Međutim, u praksi to ne znači da propusni opseg kontinualne funkcije prenosa može biti neograničeno veliki. Naime, kao što se vidi iz osobina funkcije preslikavanja, veliki propusni opseg kontinualnog sistema doveo bi do izuzetno velikog izobličenja frekvencijskih karakteristika, a time i do značajne degradacije performanse diskretnog sistema.
Pošto se ovom transformacijom leva poluravan s-ravni preslikava u unutrašnjost jediničnog kruga u z-ravni izvesno je da će biti očuvana stabilnost kontinualnog sistema. Međutim, impulsni i odskočni odziv nisu posebno očuvani. Slaganje impulsnog i
pTez =
1z1z
T2
s+−=
2/sT12/sT1
z−+=
zlnT1
p =
)1,0(xxz
ez
ez
ez
ez
1z
6
j5
j4
2j3
2/j2
1
∈−==
=
=
=
=
π
π
π
]T2,(s
],2[;RRes
jsT
js
T2
js
0s
6
j5
4
3
2
1
−−∞∈ππ∈θ∞→=
∞=
π=
=
=
θ
),0(pT
jp
Tjp
T2
jp
T2jp
0p
6
5
4
3
2
1
−∞∈
π=
π=
=
π=
=
SL. 3-24 PRESLIKAVANJE DOMENA Z -TRANSFORMACIJA I TUSTINOVA APROKSIMACIJA

Disk/55
zlnT1
p)p(Q)z(D ==
1z1z
T2
s)z(D)s(G+−==
odskočnog odziva, kao i drugih odziva zavisi od oblika ulaznog signala, odnosno od mere u kojoj trapezoidna integracija dobro aproksimira integral.
Da bi se jasnije sagledalo preslikavanje učestanosti posmatraće se neka kontinualna funkcija prenosa G(s). Neka je
ϕ=ω jA Me)j(G
Postavlja se pitanje pri kojoj učestanosti ωD diskretna funkcija prenosa dobijena Tustinovom aproksimacijom ima istu vrednost amplitude i faze, odnosno za koju važi
ϕω = jTj Me)e(D D Tražena učestanost dobija
se iz funkcije preslikavanja s-domena u z-domen, odakle se vidi da je
2 1
12 22
2 2
2
22
22
2
D
D
j T
A j T
D
D
D
DA
AD
ej
T esin( T )
jT cos( T )
Tj tgT
Ttg ;
TT
arctgT
− ω
− ω−ω = =+ω
= =ω
ω= ⇒
ω⇒ ω =
ωω =
Na osnovu ovih relacija vidi se (Sl. 3-26) da su vrednosti obe funkcije iste za učestanost ω=0, kao i da se za male učestanosti dobija izuzetno dobro slaganje.
Ovo je posledica činjenice da se tangens, za male vrednosti argumenta, može aproksimirati argumentom.
Napomenimo da je ova osobina tangensa upravo i razlog zašto se za diskretizaciju koristi Tustinova aproksimacija, a ne Mebijusova bilinearna transformacija kod koje je
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
)2
T(arctg
T2 A
Dω
=ω
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
)2
T(tg
T2 D
Aω
=ω
SL. 3-25 PRESLIKAVANJE FREKVENCIJSKIH KARAKTERISTIKA
SL. 3-26 PRESLIKAVANJE U ČESTANOSTI KOD TUSTINOVE TRANSFORMACIJE
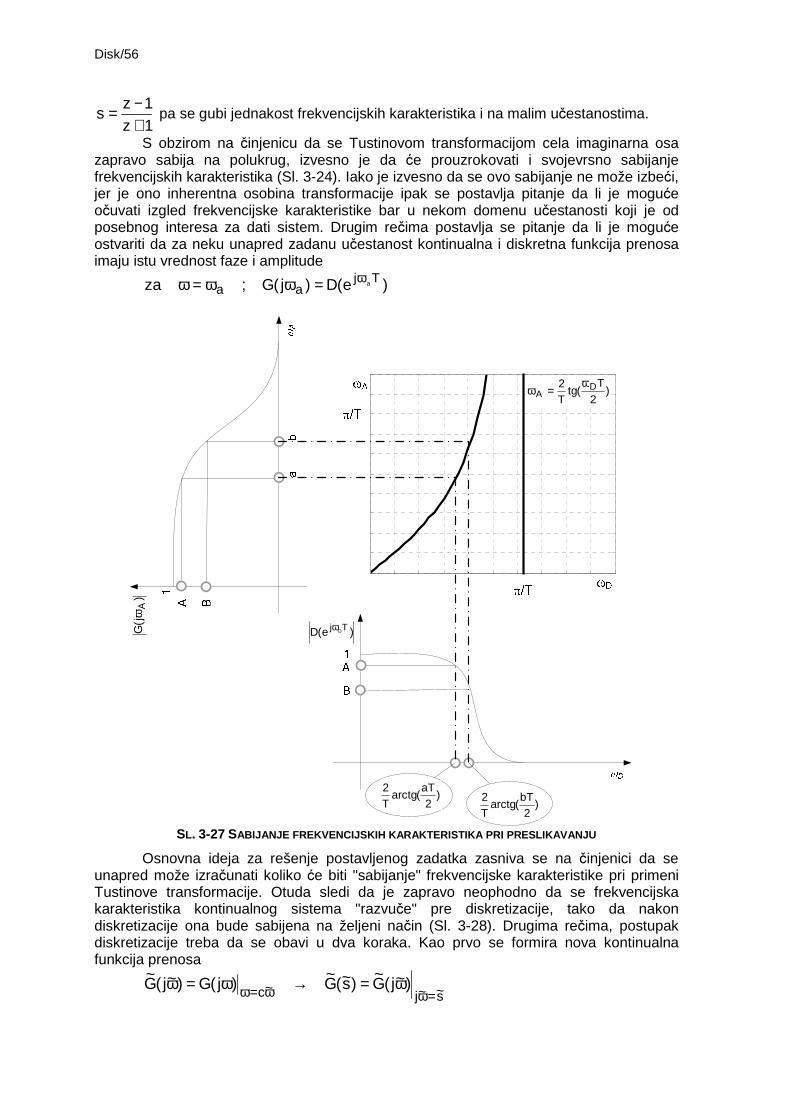
Disk/56
1z1z
s+−= pa se gubi jednakost frekvencijskih karakteristika i na malim učestanostima.
S obzirom na činjenicu da se Tustinovom transformacijom cela imaginarna osa zapravo sabija na polukrug, izvesno je da će prouzrokovati i svojevrsno sabijanje frekvencijskih karakteristika (Sl. 3-24). Iako je izvesno da se ovo sabijanje ne može izbeći, jer je ono inherentna osobina transformacije ipak se postavlja pitanje da li je moguće očuvati izgled frekvencijske karakteristike bar u nekom domenu učestanosti koji je od posebnog interesa za dati sistem. Drugim rečima postavlja se pitanje da li je moguće ostvariti da za neku unapred zadanu učestanost kontinualna i diskretna funkcija prenosa imaju istu vrednost faze i amplitude
)e(D)j(G;za Tjaa
aω=ωω=ω
SL. 3-27 SABIJANJE FREKVENCIJSKIH KARAKTERISTIKA PRI PRESLIKA VANJU
Osnovna ideja za rešenje postavljenog zadatka zasniva se na činjenici da se unapred može izračunati koliko će biti "sabijanje" frekvencijske karakteristike pri primeni Tustinove transformacije. Otuda sledi da je zapravo neophodno da se frekvencijska karakteristika kontinualnog sistema "razvuče" pre diskretizacije, tako da nakon diskretizacije ona bude sabijena na željeni način (Sl. 3-28). Drugima rečima, postupak diskretizacije treba da se obavi u dva koraka. Kao prvo se formira nova kontinualna funkcija prenosa
s~~j~c )~j(G
~)s~(G
~)j(G)~j(G
~=ωω=ω ω=→ω=ω
)2
T(tg
T2 D
Aω
=ω
)2
aT(arctg
T2
)2
bT(arctg
T2
)e(D Tj Dω
)j(
GA
ω
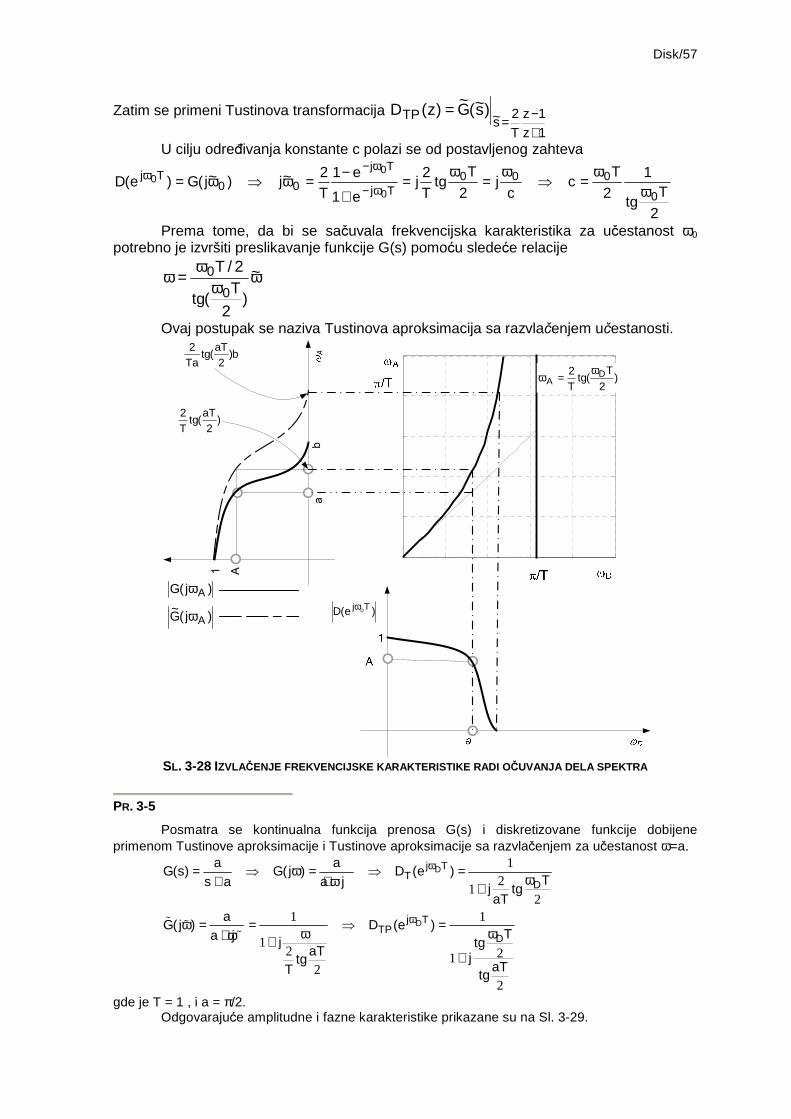
Disk/57
Zatim se primeni Tustinova transformacija
1z1z
T2
s~TP )s~(G~
)z(D+−=
=
U cilju određivanja konstante c polazi se od postavljenog zahteva
2
Ttg
12
Tc
cj
2
Ttg
T2
je1
e1T2~j)~j(G)e(D
0
000Tj
Tj
00Tj
0
00
ωω
=⇒
ω=
ω=
+
−=ω⇒ω=ω−
ω−ω
Prema tome, da bi se sačuvala frekvencijska karakteristika za učestanost ω0 potrebno je izvršiti preslikavanje funkcije G(s) pomoću sledeće relacije
ωω
ω=ω ~
)2
T(tg
2/T
0
0
Ovaj postupak se naziva Tustinova aproksimacija sa razvlačenjem učestanosti.
SL. 3-28 IZVLAČENJE FREKVENCIJSKE KARAKTERISTIKE RADI O ČUVANJA DELA SPEKTRA
PR. 3-5
Posmatra se kontinualna funkcija prenosa G(s) i diskretizovane funkcije dobijene primenom Tustinove aproksimacije i Tustinove aproksimacije sa razvlačenjem za učestanost ω=a.
12
12
1 1
12 21
22
D
D
j TT
D
j TTP
D
a aG(s) G(j ) D (e )
Ts a a j j tgaT
aG( j ) D (e )
Ta j j tgaT jtg aTT tg
ω
ω
= ⇒ ω = ⇒ =ω+ + ω +
ω = = ⇒ =ω ω+ ω +
+
% %%
gde je T = 1 , i a = π/2. Odgovarajuće amplitudne i fazne karakteristike prikazane su na Sl. 3-29.
bA
)2
T(tg
T2 D
Aω
=ω
A
)2
aT(tg
T2
b)2
aT(tg
Ta2
)e(D Tj Dω
)j(G Aω
a
1
)j(G~
Aω
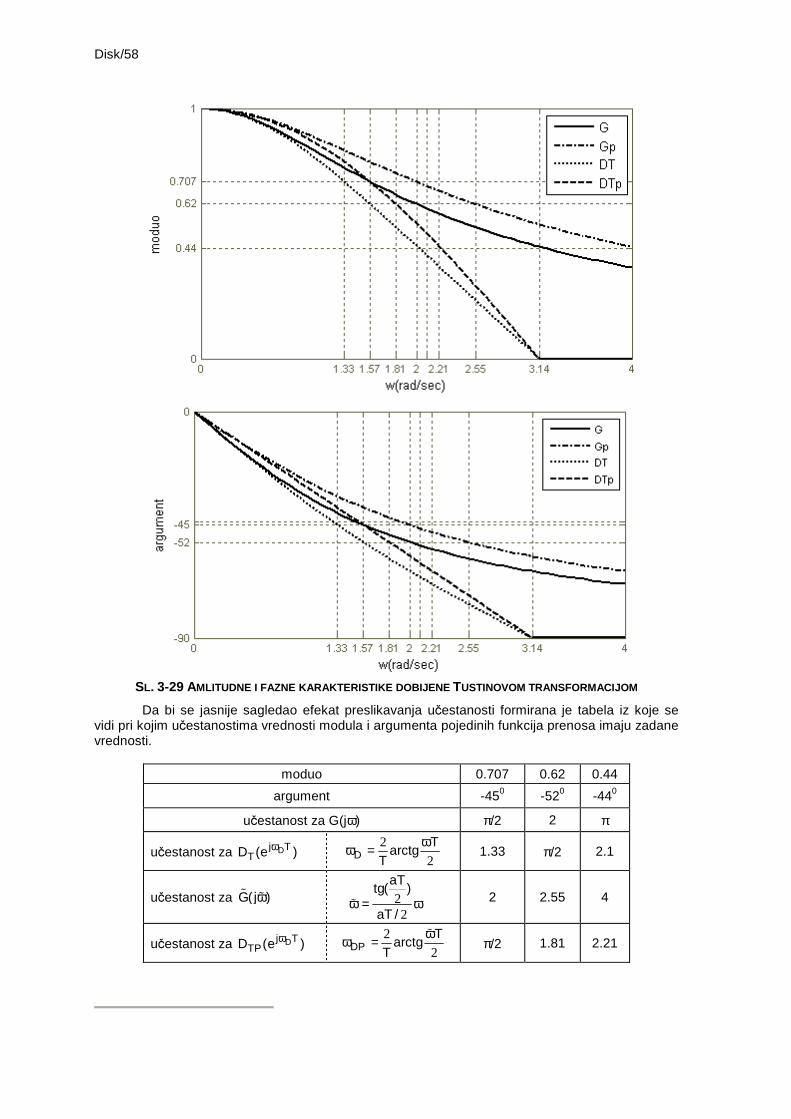
Disk/58
SL. 3-29 AMLITUDNE I FAZNE KARAKTERISTIKE DOBIJENE TUSTINOVOM TRANSFORMACIJOM
Da bi se jasnije sagledao efekat preslikavanja učestanosti formirana je tabela iz koje se vidi pri kojim učestanostima vrednosti modula i argumenta pojedinih funkcija prenosa imaju zadane vrednosti.
moduo 0.707 0.62 0.44
argument -450 -520 -440
učestanost za G(jω) π/2 2 π
učestanost za Dj TTD (e )ω
2
2DT
arctgT
ωω = 1.33 π/2 2.1
učestanost za G(j )ω% % 22
aTtg( )
aT /ω = ω% 2 2.55 4
učestanost za Dj TTPD (e )ω
2
2DPT
arctgT
ωω =%
π/2 1.81 2.21
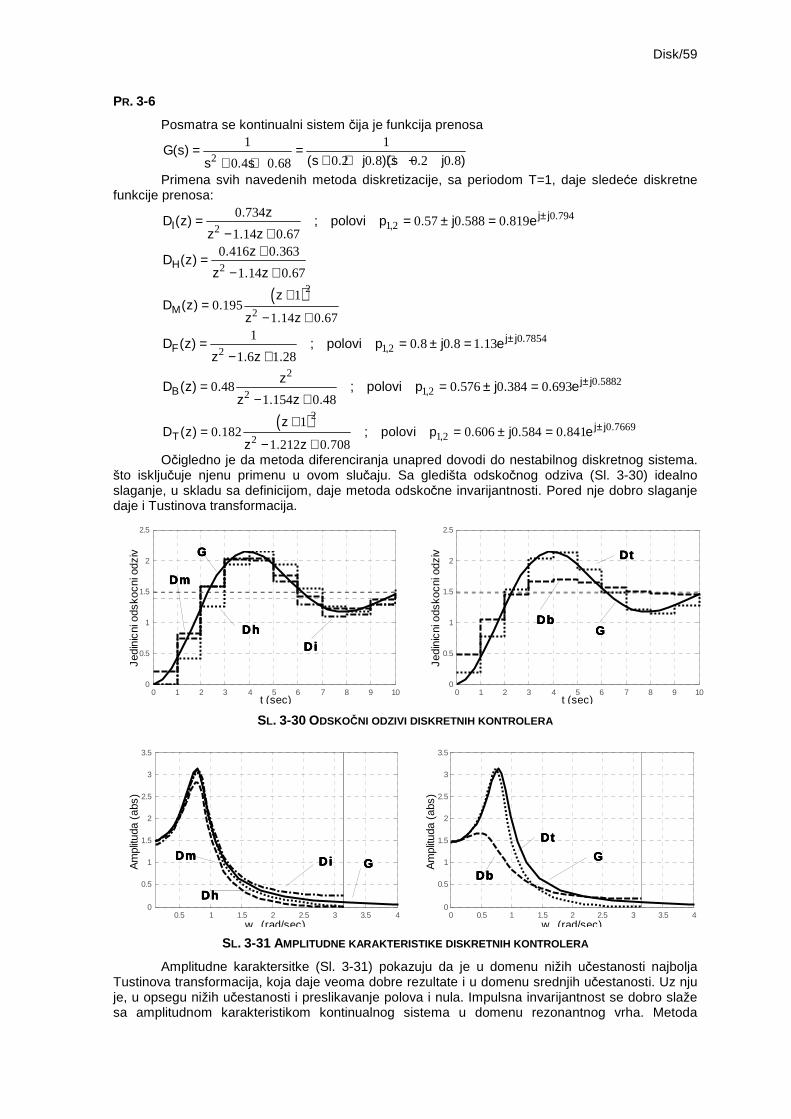
Disk/59
PR. 3-6
Posmatra se kontinualni sistem čija je funkcija prenosa
2
1 1
0 2 0 8 0 2 0 80 4 0 68G(s)
(s . j . )(s . j . )s . s .= =
+ + + −+ +
Primena svih navedenih metoda diskretizacije, sa periodom T=1, daje sledeće diskretne funkcije prenosa:
0 7941 22
0 7340 57 0 588 0 819
1 14 0 67
j j .I ,
. zD (z) ; polovi p . j . . e
z . z .±= = ± =
− +
2
0 416 0 363
1 14 0 67H
. z .D (z)
z . z .
+=− +
( )2
2
10 195
1 14 0 67M
zD (z) .
z . z .
+=
− +
0 78541 22
10 8 0 8 1 13
1 6 1 28
j j .F ,D (z) ; polovi p . j . . e
z . z .±= = ± =
− +
20 5882
1 220 48 0 576 0 384 0 693
1 154 0 48
j j .B ,
zD (z) . ; polovi p . j . . e
z . z .±= = ± =
− +
( )20 7669
1 22
10 182 0 606 0 584 0 841
1 212 0 708
j j .T ,
zD (z) . ; polovi p . j . . e
z . z .±+
= = ± =− +
Očigledno je da metoda diferenciranja unapred dovodi do nestabilnog diskretnog sistema. što isključuje njenu primenu u ovom slučaju. Sa gledišta odskočnog odziva (Sl. 3-30) idealno slaganje, u skladu sa definicijom, daje metoda odskočne invarijantnosti. Pored nje dobro slaganje daje i Tustinova transformacija.
SL. 3-30 ODSKOČNI ODZIVI DISKRETNIH KONTROLERA
SL. 3-31 AMPLITUDNE KARAKTERISTIKE DISKRETNIH KONTROLERA
Amplitudne karaktersitke (Sl. 3-31) pokazuju da je u domenu nižih učestanosti najbolja Tustinova transformacija, koja daje veoma dobre rezultate i u domenu srednjih učestanosti. Uz nju je, u opsegu nižih učestanosti i preslikavanje polova i nula. Impulsna invarijantnost se dobro slaže sa amplitudnom karakteristikom kontinualnog sistema u domenu rezonantnog vrha. Metoda
t (sec)
Jedi
nicn
i ods
kocn
i odz
iv
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
DmDmDmDm
DiDiDiD iDhDhDhDh
GGGG
t (sec)
Jedi
nicn
i ods
kocn
i odz
iv
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
GGGG
DtDtDtDt
DbDbDbDb
w (rad/sec)
Am
plitu
da (
abs)
0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
DmDmDmDm DiDiDiD i GGGG
DhDhDhDh
w (rad/sec)
Am
plitu
da (
abs)
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
DbDbDbDb
DtDtDtDt
GGGG
Disk/60
diferenciranja u nazad daje najslabije rezultate. Ovo nije začuđujuće, ako se ima na umu da je ovo i najgrublja aproksimacija diferenciranja. Jedina prednost ove metode je veoma jednostavan kontroler koji se može lako realizovati i čije izračunavanje zahteva malo vremena.
Tsamp/61
4. IZBOR PERIODE ODABIRANJA
4.1. UVOD Izbor periode odabiranja predstavlja jedan od ključnih problema u projektovanju
diskretnih sistema i ne postoji univerzalni metod za rešavanje ovog problema. Teorijski gledano teorema odabiranja kaže da je kontinualni signal čiji je spektar
ograničen na interval (-ωg, ωg) jednoznačno određen svojim vrednostima u ekvidistantnim tačkama određenim sa učestanošću Ω, uz uslov da je Ω>2ωg. Ovaj uslov, u svakom slučaju određuje gornju granicu vremena odabiranja
ggNNgN f2
12T2 =
ωπ=
Ωπ=⇒ω=Ω
gde se ΩN označava kao Nikvistova učestanost. Brojni razlozi zahtevaju da u praktičnim realizacijama vreme odabiranja bude
znatno manje od teorijske granice. Izbor, naime zavisi od osobina signala koji se diskretizuje, metode koja će se koristiti za rekonstrukciju signala, svrhe za koju se sistem projektuje, kao i načina na koji je projektovan.
Ukoliko se sistem koristi za obradu signala problem se najčešće svodi na snimanje digitalnog signala, njegov prenos i kasnije rekonstrukciju. Otuda se kao kriterijum za izbor periode odabiranja prirodno nameće veličina greške između originalnog signala i njegove rekonstrukcije.
Kod upravljanja sistemima problem je složeniji iz više razloga. Pre svega signal nije precizno definisan u smislu frekvencijskog sadržaja. Naime, pored propusnog opsega samog sistema u zatvorenoj sprezi mora se uzeti u obzir i poremećaj izazvan mernom opremom. Pored toga, odskočna funkcija, koja se veoma često dovodi na ulaz sistema ima neograničen spektar. Konačno, činjenica je i da su neki kontroleri osetljiviji na vreme odabiranja.
Performansa sistema upravljanja se prirodno nameće kao osnovni kriterijum pri izboru periode odabiranja. U tom smislu, najviša učestanost od interesa za diskretizaciju vezana je za propusni opseg sistema u zatvorenoj sprezi. Budući da je dinamika najvećeg broja realnih sistema upravljanja nisko propusnog tipa, pri diskretizaciji se, po pravilu, koriste manje učestanosti nego u obradi signala. Pored toga, vremenske konstante pojedinih komponenti sistema su po pravilu znatno veće od vremena odziva sistema u zatvorenoj sprezi. Ovo ima za posledicu da je doprinos odzivu sistema u toku jednog perioda odabiranja relativno neosetljiv na oblik impulsa, već zavisi samo od njegovog intenziteta (površine impulsa).
U analizi performanse sistema uočavaju se četiri osnovna fenomena vezana za diskretizaciju: • destabilizacija sistema – stabilnost sistema opada sa povećanjem periode odabiranja • gubitak informacija – informacije o signalima se gube sa povećanjem periode odabiranja • tačnost algoritma se smanjuje sa povećanjem periode odabiranja • tačnost numeričkog izračunavanja – efekat konačne dužine reći je više izražen ukoliko
se perioda odabiranja smanjuje
Destabi l izacija s istema Digitalni algoritam se razlikuje od svog analognog ekvivalenta i po tome što je za
diskretizaciju kontinualnog signala na njegovom ulazu i izračunavanje upravljanja potrebno izvesno vreme. Čak i za realizaciju najednostavnijeg, proprocionalnog zakona upravljanja
pu(t) K e(t)=
njegov digitalni ekvivalent
pu(nT) K e(nT)=
će zahtevati vreme potrebno za A/D konverziju ulaznog signala greške, množenje
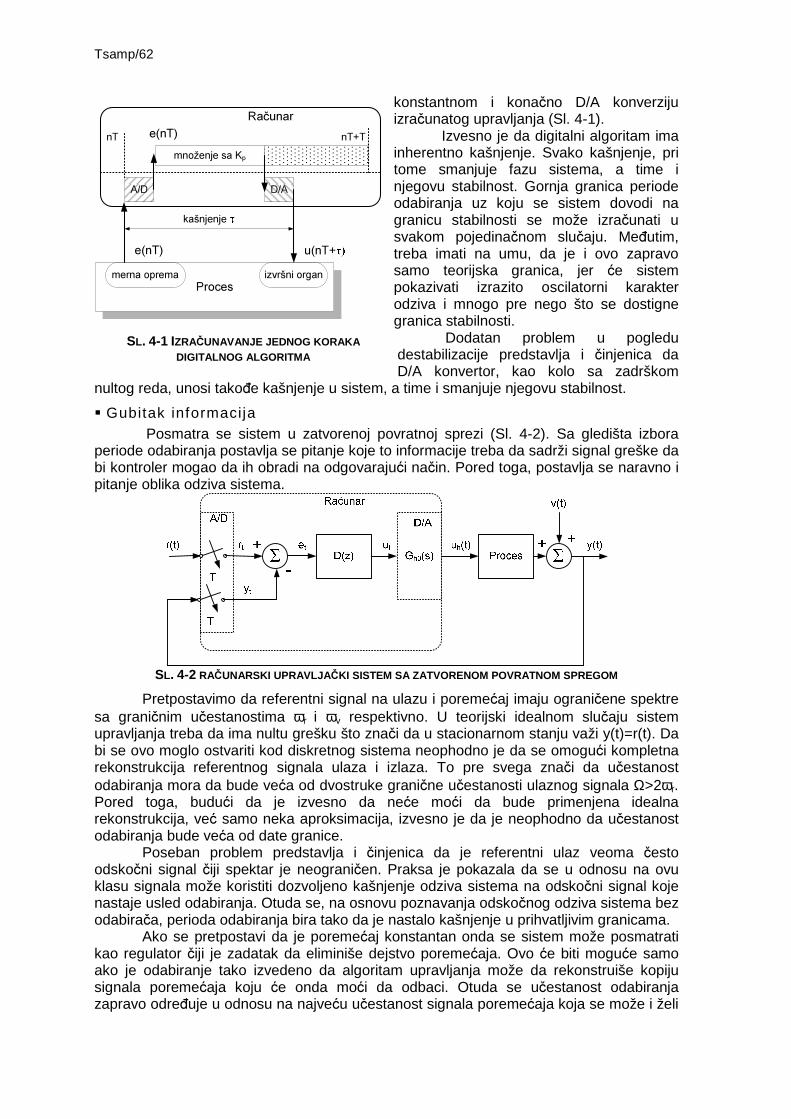
Tsamp/62
konstantnom i konačno D/A konverziju izračunatog upravljanja (Sl. 4-1).
Izvesno je da digitalni algoritam ima inherentno kašnjenje. Svako kašnjenje, pri tome smanjuje fazu sistema, a time i njegovu stabilnost. Gornja granica periode odabiranja uz koju se sistem dovodi na granicu stabilnosti se može izračunati u svakom pojedinačnom slučaju. Međutim, treba imati na umu, da je i ovo zapravo samo teorijska granica, jer će sistem pokazivati izrazito oscilatorni karakter odziva i mnogo pre nego što se dostigne granica stabilnosti.
Dodatan problem u pogledu destabilizacije predstavlja i činjenica da D/A konvertor, kao kolo sa zadrškom
nultog reda, unosi takođe kašnjenje u sistem, a time i smanjuje njegovu stabilnost.
Gubitak informacija Posmatra se sistem u zatvorenoj povratnoj sprezi (Sl. 4-2). Sa gledišta izbora
periode odabiranja postavlja se pitanje koje to informacije treba da sadrži signal greške da bi kontroler mogao da ih obradi na odgovarajući način. Pored toga, postavlja se naravno i pitanje oblika odziva sistema.
SL. 4-2 RAČUNARSKI UPRAVLJA ČKI SISTEM SA ZATVORENOM POVRATNOM SPREGOM
Pretpostavimo da referentni signal na ulazu i poremećaj imaju ograničene spektre sa graničnim učestanostima ωr i ωv respektivno. U teorijski idealnom slučaju sistem upravljanja treba da ima nultu grešku što znači da u stacionarnom stanju važi y(t)=r(t). Da bi se ovo moglo ostvariti kod diskretnog sistema neophodno je da se omogući kompletna rekonstrukcija referentnog signala ulaza i izlaza. To pre svega znači da učestanost odabiranja mora da bude veća od dvostruke granične učestanosti ulaznog signala Ω>2ωr. Pored toga, budući da je izvesno da neće moći da bude primenjena idealna rekonstrukcija, već samo neka aproksimacija, izvesno je da je neophodno da učestanost odabiranja bude veća od date granice.
Poseban problem predstavlja i činjenica da je referentni ulaz veoma često odskočni signal čiji spektar je neograničen. Praksa je pokazala da se u odnosu na ovu klasu signala može koristiti dozvoljeno kašnjenje odziva sistema na odskočni signal koje nastaje usled odabiranja. Otuda se, na osnovu poznavanja odskočnog odziva sistema bez odabirača, perioda odabiranja bira tako da je nastalo kašnjenje u prihvatljivim granicama.
Ako se pretpostavi da je poremećaj konstantan onda se sistem može posmatrati kao regulator čiji je zadatak da eliminiše dejstvo poremećaja. Ovo će biti moguće samo ako je odabiranje tako izvedeno da algoritam upravljanja može da rekonstruiše kopiju signala poremećaja koju će onda moći da odbaci. Otuda se učestanost odabiranja zapravo određuje u odnosu na najveću učestanost signala poremećaja koja se može i želi
SL. 4-1 IZRAČUNAVANJE JEDNOG KORAKA DIGITALNOG ALGORITMA
množenje sa Kp
A/D D/A
u(nT+
e(nT)nT nT+T
kašnjenje
Procesmerna oprema izvršni organ
e(nT)
Računar
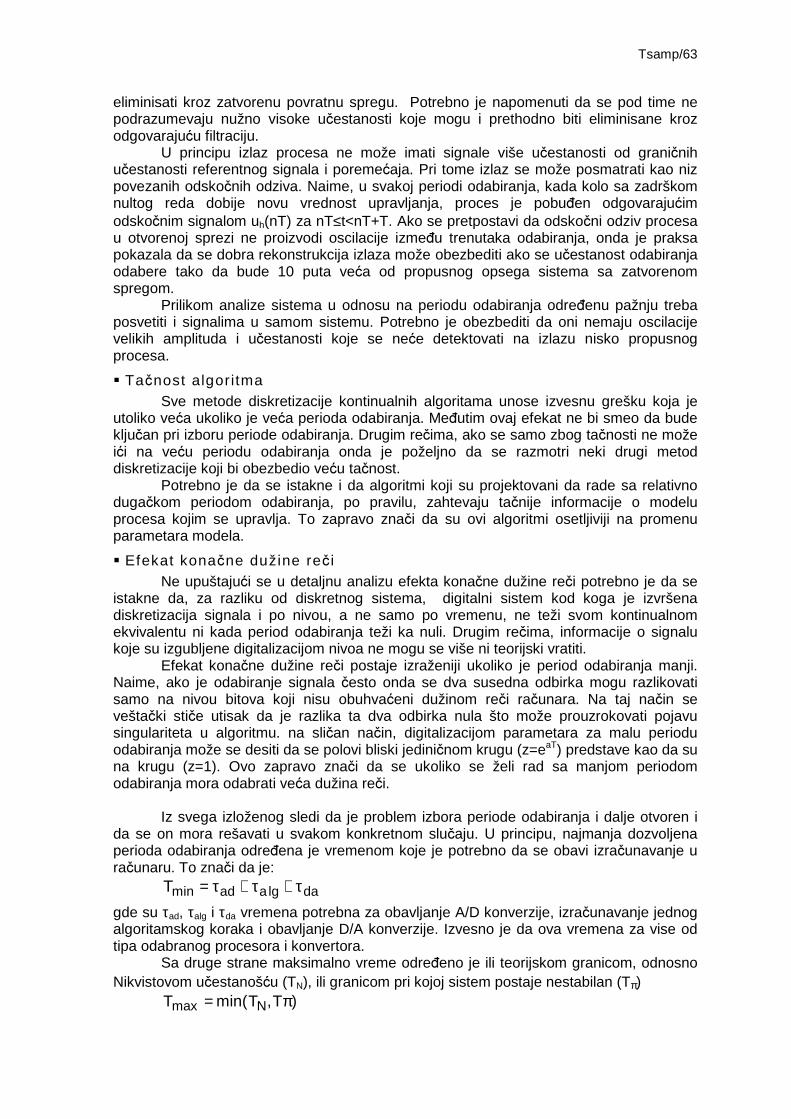
Tsamp/63
eliminisati kroz zatvorenu povratnu spregu. Potrebno je napomenuti da se pod time ne podrazumevaju nužno visoke učestanosti koje mogu i prethodno biti eliminisane kroz odgovarajuću filtraciju.
U principu izlaz procesa ne može imati signale više učestanosti od graničnih učestanosti referentnog signala i poremećaja. Pri tome izlaz se može posmatrati kao niz povezanih odskočnih odziva. Naime, u svakoj periodi odabiranja, kada kolo sa zadrškom nultog reda dobije novu vrednost upravljanja, proces je pobuđen odgovarajućim odskočnim signalom uh(nT) za nT≤t<nT+T. Ako se pretpostavi da odskočni odziv procesa u otvorenoj sprezi ne proizvodi oscilacije između trenutaka odabiranja, onda je praksa pokazala da se dobra rekonstrukcija izlaza može obezbediti ako se učestanost odabiranja odabere tako da bude 10 puta veća od propusnog opsega sistema sa zatvorenom spregom.
Prilikom analize sistema u odnosu na periodu odabiranja određenu pažnju treba posvetiti i signalima u samom sistemu. Potrebno je obezbediti da oni nemaju oscilacije velikih amplituda i učestanosti koje se neće detektovati na izlazu nisko propusnog procesa.
Tačnost algoritma Sve metode diskretizacije kontinualnih algoritama unose izvesnu grešku koja je
utoliko veća ukoliko je veća perioda odabiranja. Međutim ovaj efekat ne bi smeo da bude ključan pri izboru periode odabiranja. Drugim rečima, ako se samo zbog tačnosti ne može ići na veću periodu odabiranja onda je poželjno da se razmotri neki drugi metod diskretizacije koji bi obezbedio veću tačnost.
Potrebno je da se istakne i da algoritmi koji su projektovani da rade sa relativno dugačkom periodom odabiranja, po pravilu, zahtevaju tačnije informacije o modelu procesa kojim se upravlja. To zapravo znači da su ovi algoritmi osetljiviji na promenu parametara modela.
Efekat konačne dužine reč i Ne upuštajući se u detaljnu analizu efekta konačne dužine reči potrebno je da se
istakne da, za razliku od diskretnog sistema, digitalni sistem kod koga je izvršena diskretizacija signala i po nivou, a ne samo po vremenu, ne teži svom kontinualnom ekvivalentu ni kada period odabiranja teži ka nuli. Drugim rečima, informacije o signalu koje su izgubljene digitalizacijom nivoa ne mogu se više ni teorijski vratiti.
Efekat konačne dužine reči postaje izraženiji ukoliko je period odabiranja manji. Naime, ako je odabiranje signala često onda se dva susedna odbirka mogu razlikovati samo na nivou bitova koji nisu obuhvaćeni dužinom reči računara. Na taj način se veštački stiče utisak da je razlika ta dva odbirka nula što može prouzrokovati pojavu singulariteta u algoritmu. na sličan način, digitalizacijom parametara za malu periodu odabiranja može se desiti da se polovi bliski jediničnom krugu (z=eaT) predstave kao da su na krugu (z=1). Ovo zapravo znači da se ukoliko se želi rad sa manjom periodom odabiranja mora odabrati veća dužina reči.
Iz svega izloženog sledi da je problem izbora periode odabiranja i dalje otvoren i
da se on mora rešavati u svakom konkretnom slučaju. U principu, najmanja dozvoljena perioda odabiranja određena je vremenom koje je potrebno da se obavi izračunavanje u računaru. To znači da je:
dalgaadminT τ+τ+τ=
gde su τad, τalg i τda vremena potrebna za obavljanje A/D konverzije, izračunavanje jednog algoritamskog koraka i obavljanje D/A konverzije. Izvesno je da ova vremena za vise od tipa odabranog procesora i konvertora. Sa druge strane maksimalno vreme određeno je ili teorijskom granicom, odnosno Nikvistovom učestanošću (TN), ili granicom pri kojoj sistem postaje nestabilan (Tπ)
)T,Tmin(T Nmax π=
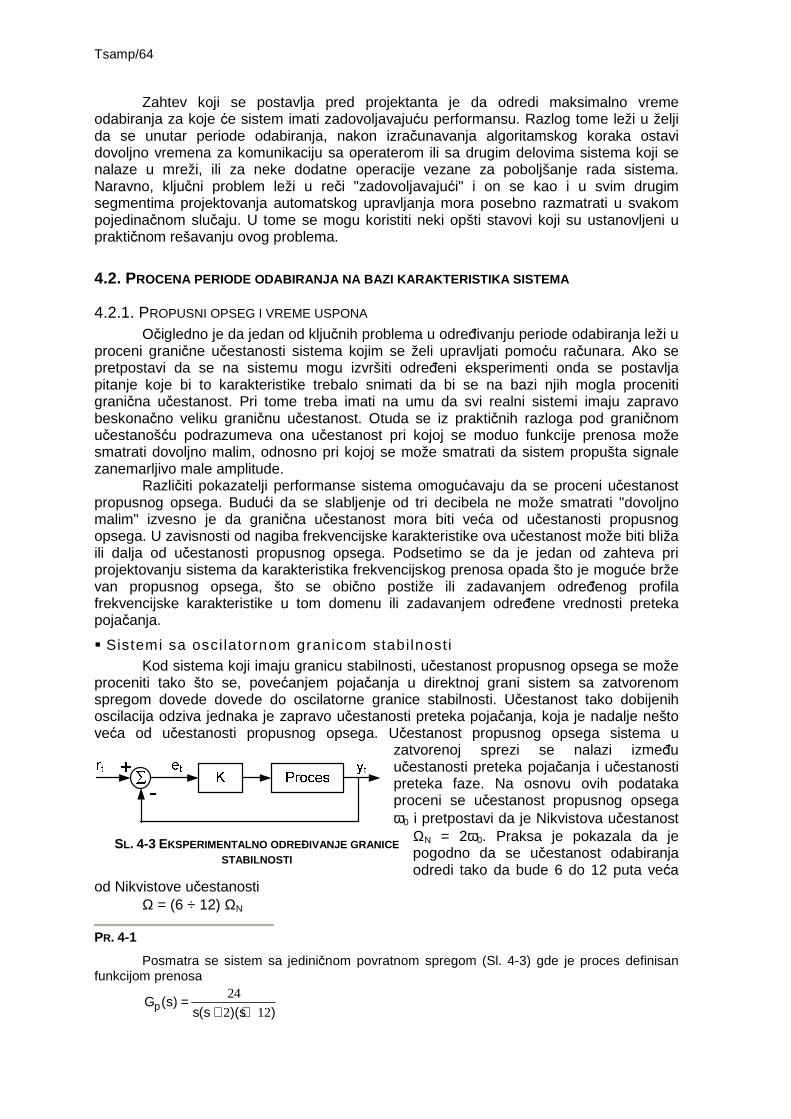
Tsamp/64
Zahtev koji se postavlja pred projektanta je da odredi maksimalno vreme odabiranja za koje će sistem imati zadovoljavajuću performansu. Razlog tome leži u želji da se unutar periode odabiranja, nakon izračunavanja algoritamskog koraka ostavi dovoljno vremena za komunikaciju sa operaterom ili sa drugim delovima sistema koji se nalaze u mreži, ili za neke dodatne operacije vezane za poboljšanje rada sistema. Naravno, ključni problem leži u reči "zadovoljavajući" i on se kao i u svim drugim segmentima projektovanja automatskog upravljanja mora posebno razmatrati u svakom pojedinačnom slučaju. U tome se mogu koristiti neki opšti stavovi koji su ustanovljeni u praktičnom rešavanju ovog problema.
4.2. PROCENA PERIODE ODABIRANJA NA BAZI KARAKTERISTIKA SISTEMA
4.2.1. PROPUSNI OPSEG I VREME USPONA Očigledno je da jedan od ključnih problema u određivanju periode odabiranja leži u
proceni granične učestanosti sistema kojim se želi upravljati pomoću računara. Ako se pretpostavi da se na sistemu mogu izvršiti određeni eksperimenti onda se postavlja pitanje koje bi to karakteristike trebalo snimati da bi se na bazi njih mogla proceniti granična učestanost. Pri tome treba imati na umu da svi realni sistemi imaju zapravo beskonačno veliku graničnu učestanost. Otuda se iz praktičnih razloga pod graničnom učestanošću podrazumeva ona učestanost pri kojoj se moduo funkcije prenosa može smatrati dovoljno malim, odnosno pri kojoj se može smatrati da sistem propušta signale zanemarljivo male amplitude.
Različiti pokazatelji performanse sistema omogućavaju da se proceni učestanost propusnog opsega. Budući da se slabljenje od tri decibela ne može smatrati "dovoljno malim" izvesno je da granična učestanost mora biti veća od učestanosti propusnog opsega. U zavisnosti od nagiba frekvencijske karakteristike ova učestanost može biti bliža ili dalja od učestanosti propusnog opsega. Podsetimo se da je jedan od zahteva pri projektovanju sistema da karakteristika frekvencijskog prenosa opada što je moguće brže van propusnog opsega, što se obično postiže ili zadavanjem određenog profila frekvencijske karakteristike u tom domenu ili zadavanjem određene vrednosti preteka pojačanja.
Sistemi sa osci latornom granicom stabilnost i Kod sistema koji imaju granicu stabilnosti, učestanost propusnog opsega se može
proceniti tako što se, povećanjem pojačanja u direktnoj grani sistem sa zatvorenom spregom dovede dovede do oscilatorne granice stabilnosti. Učestanost tako dobijenih oscilacija odziva jednaka je zapravo učestanosti preteka pojačanja, koja je nadalje nešto veća od učestanosti propusnog opsega. Učestanost propusnog opsega sistema u
zatvorenoj sprezi se nalazi između učestanosti preteka pojačanja i učestanosti preteka faze. Na osnovu ovih podataka proceni se učestanost propusnog opsega ω0 i pretpostavi da je Nikvistova učestanost
ΩN = 2ω0. Praksa je pokazala da je pogodno da se učestanost odabiranja odredi tako da bude 6 do 12 puta veća
od Nikvistove učestanosti Ω = (6 ÷ 12) ΩN
PR. 4-1
Posmatra se sistem sa jediničnom povratnom spregom (Sl. 4-3) gde je proces definisan funkcijom prenosa
24
2 12pG (s)s(s )(s )
=+ +
SL. 4-3 EKSPERIMENTALNO ODREĐIVANJE GRANICE STABILNOSTI
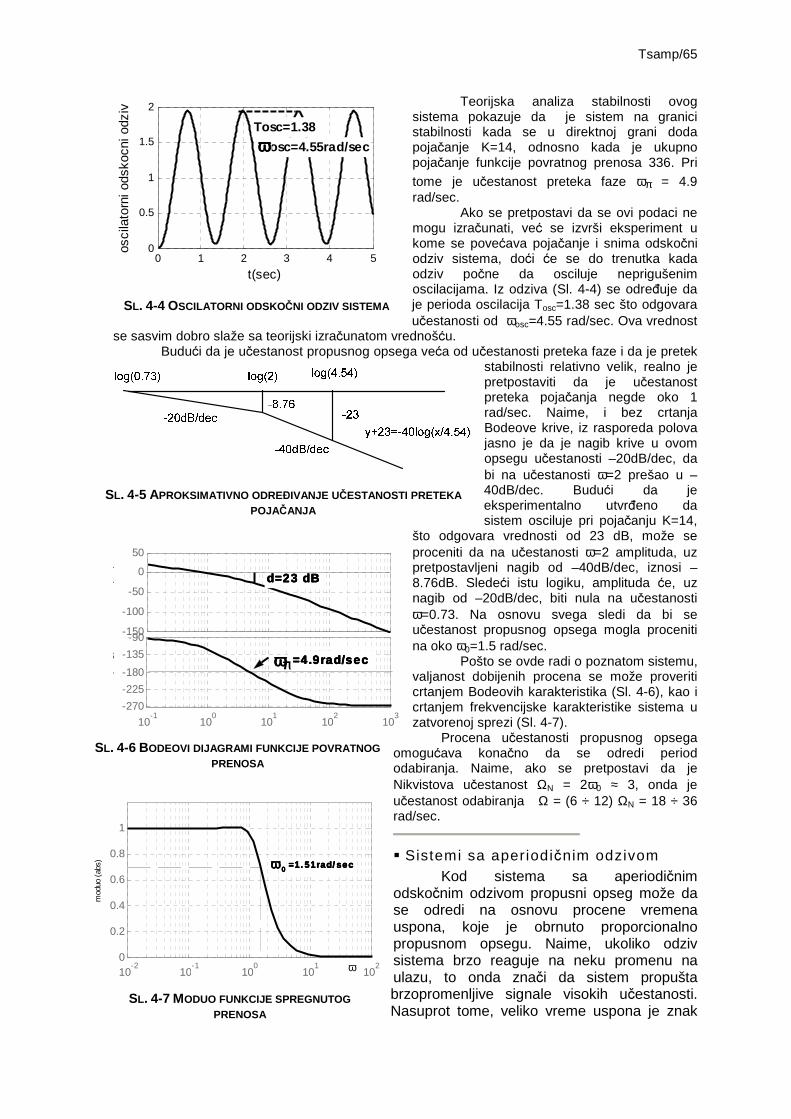
Tsamp/65
Teorijska analiza stabilnosti ovog sistema pokazuje da je sistem na granici stabilnosti kada se u direktnoj grani doda pojačanje K=14, odnosno kada je ukupno pojačanje funkcije povratnog prenosa 336. Pri tome je učestanost preteka faze ωπ = 4.9 rad/sec.
Ako se pretpostavi da se ovi podaci ne mogu izračunati, već se izvrši eksperiment u kome se povećava pojačanje i snima odskočni odziv sistema, doći će se do trenutka kada odziv počne da osciluje neprigušenim oscilacijama. Iz odziva (Sl. 4-4) se određuje da je perioda oscilacija Tosc=1.38 sec što odgovara učestanosti od ωosc=4.55 rad/sec. Ova vrednost
se sasvim dobro slaže sa teorijski izračunatom vrednošću. Budući da je učestanost propusnog opsega veća od učestanosti preteka faze i da je pretek
stabilnosti relativno velik, realno je pretpostaviti da je učestanost preteka pojačanja negde oko 1 rad/sec. Naime, i bez crtanja Bodeove krive, iz rasporeda polova jasno je da je nagib krive u ovom opsegu učestanosti –20dB/dec, da bi na učestanosti ω=2 prešao u –40dB/dec. Budući da je eksperimentalno utvrđeno da sistem osciluje pri pojačanju K=14,
što odgovara vrednosti od 23 dB, može se proceniti da na učestanosti ω=2 amplituda, uz pretpostavljeni nagib od –40dB/dec, iznosi –8.76dB. Sledeći istu logiku, amplituda će, uz nagib od –20dB/dec, biti nula na učestanosti ω=0.73. Na osnovu svega sledi da bi se učestanost propusnog opsega mogla proceniti na oko ω0=1.5 rad/sec.
Pošto se ovde radi o poznatom sistemu, valjanost dobijenih procena se može proveriti crtanjem Bodeovih karakteristika (Sl. 4-6), kao i crtanjem frekvencijske karakteristike sistema u zatvorenoj sprezi (Sl. 4-7).
Procena učestanosti propusnog opsega omogućava konačno da se odredi period odabiranja. Naime, ako se pretpostavi da je Nikvistova učestanost ΩN = 2ω0 ≈ 3, onda je učestanost odabiranja Ω = (6 ÷ 12) ΩN = 18 ÷ 36 rad/sec.
Sistemi sa aperiodičnim odzivom Kod sistema sa aperiodičnim
odskočnim odzivom propusni opseg može da se odredi na osnovu procene vremena uspona, koje je obrnuto proporcionalno propusnom opsegu. Naime, ukoliko odziv sistema brzo reaguje na neku promenu na ulazu, to onda znači da sistem propušta brzopromenljive signale visokih učestanosti. Nasuprot tome, veliko vreme uspona je znak
SL. 4-4 OSCILATORNI ODSKOČNI ODZIV SISTEMA
SL. 4-5 APROKSIMATIVNO ODREĐIVANJE UČESTANOSTI PRETEKA POJAČANJA
SL. 4-6 BODEOVI DIJAGRAMI FUNKCIJE POVRATNOG PRENOSA
SL. 4-7 MODUO FUNKCIJE SPREGNUTOG PRENOSA
-150
-100
-50
0
50
mod
uo (
dB)
10-1
100
101
102
103
-270
-225
-180
-135
-90
faza
(de
g) ωωωωπ π π π =4.9rad/sec =4.9rad/sec =4.9rad/sec =4.9rad/sec
d=23 dB d=23 dB d=23 dB d=23 dB
0 1 2 3 4 50
0.5
1
1.5
2
t(sec)
osci
lato
rni o
dsko
cni o
dziv
Tosc=1.38
osc=4.55rad/secωωωω
10-2
10-1
100
101
102
0
0.2
0.4
0.6
0.8
1
mod
uo (
abs)
ω
=1. 51rad/ sec=1. 51rad/ sec=1. 51rad/ sec=1. 51rad/ secωωωω 0000
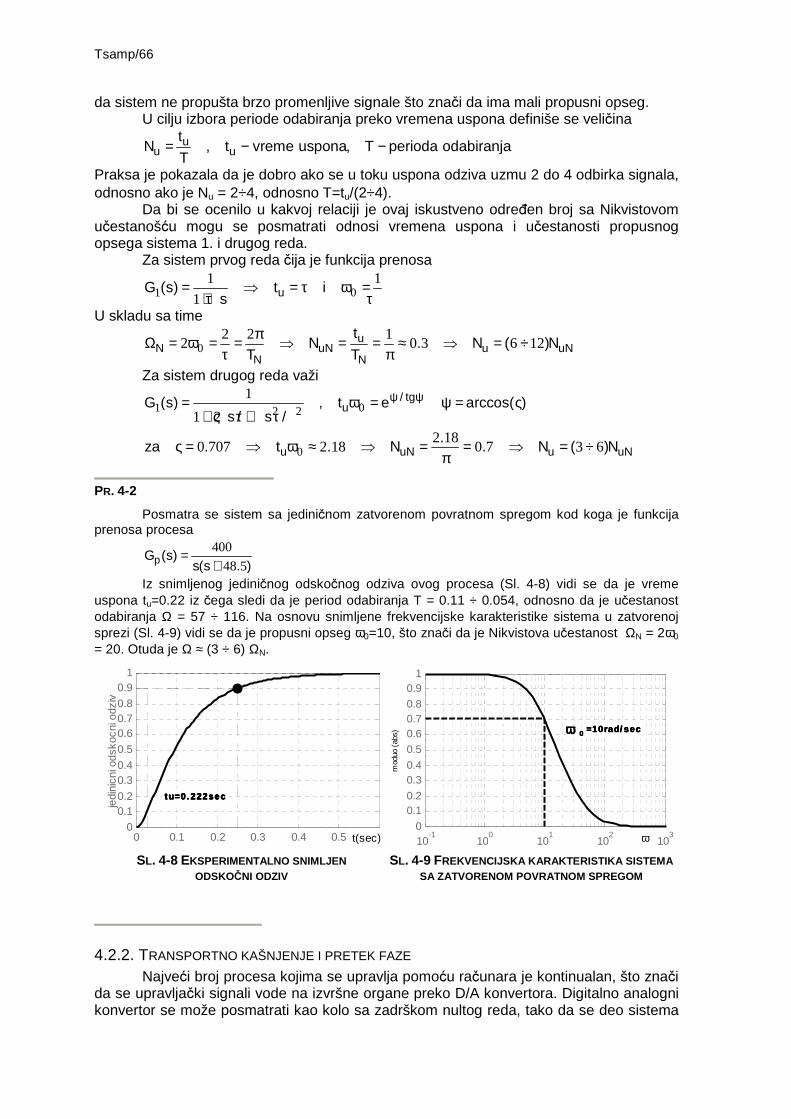
Tsamp/66
da sistem ne propušta brzo promenljive signale što znači da ima mali propusni opseg. U cilju izbora periode odabiranja preko vremena uspona definiše se veličina
uu u
tN , t vreme uspona, T perioda odabiranja
T= − −
Praksa je pokazala da je dobro ako se u toku uspona odziva uzmu 2 do 4 odbirka signala, odnosno ako je Nu = 2÷4, odnosno T=tu/(2÷4). Da bi se ocenilo u kakvoj relaciji je ovaj iskustveno određen broj sa Nikvistovom učestanošću mogu se posmatrati odnosi vremena uspona i učestanosti propusnog opsega sistema 1. i drugog reda.
Za sistem prvog reda čija je funkcija prenosa
1 01 1
1 uG (s) t is
= ⇒ = τ ω =+ τ τ
U skladu sa time
02 2 1
2 0 3 6 12uN uN u uN
N N
tN . N ( )N
T TπΩ = ω = = ⇒ = = ≈ ⇒ = ÷
τ π
Za sistem drugog reda važi
1 02 2
1
1 2
/ tguG (s) , t e arccos( )
s / s /ψ ψ= ω = ψ = ς
+ ς τ + τ
02 18
0 707 2 18 0 7 3 6u uN u uN.
za . t . N . N ( )Nς = ⇒ ω ≈ ⇒ = = ⇒ = ÷π
PR. 4-2
Posmatra se sistem sa jediničnom zatvorenom povratnom spregom kod koga je funkcija prenosa procesa
400
48 5pG (s)s(s . )
=+
Iz snimljenog jediničnog odskočnog odziva ovog procesa (Sl. 4-8) vidi se da je vreme uspona tu=0.22 iz čega sledi da je period odabiranja T = 0.11 ÷ 0.054, odnosno da je učestanost odabiranja Ω = 57 ÷ 116. Na osnovu snimljene frekvencijske karakteristike sistema u zatvorenoj sprezi (Sl. 4-9) vidi se da je propusni opseg ω0=10, što znači da je Nikvistova učestanost ΩN = 2ω0 = 20. Otuda je Ω ≈ (3 ÷ 6) ΩN.
SL. 4-8 EKSPERIMENTALNO SNIMLJEN
ODSKOČNI ODZIV SL. 4-9 FREKVENCIJSKA KARAKTERISTIKA SISTEMA
SA ZATVORENOM POVRATNOM SPREGOM
4.2.2. TRANSPORTNO KAŠNJENJE I PRETEK FAZE Najveći broj procesa kojima se upravlja pomoću računara je kontinualan, što znači
da se upravljački signali vode na izvršne organe preko D/A konvertora. Digitalno analogni konvertor se može posmatrati kao kolo sa zadrškom nultog reda, tako da se deo sistema
0 0.1 0.2 0.3 0.4 0.50
0.10.2
0.30.4
0.5
0.60.70.8
0.91
jedi
nicn
i ods
kocn
i odz
iv
tu=0. 222sectu=0. 222sectu=0. 222sectu=0. 222sec
t(sec) 10-1
100
101
102
103
0
0.10.2
0.30.4
0.50.60.70.8
0.91
mod
uo (
abs) ωωωω 0000
=10rad/ sec=10rad/ sec=10rad/ sec=10rad/ sec
ω
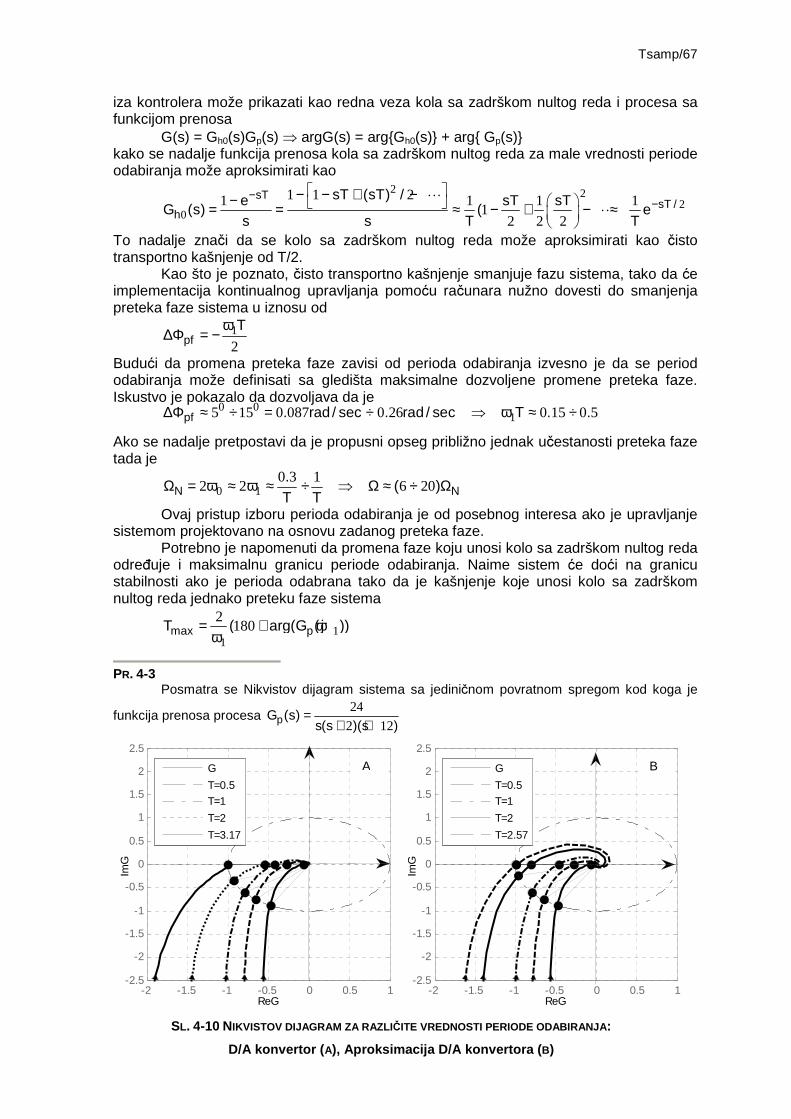
Tsamp/67
iza kontrolera može prikazati kao redna veza kola sa zadrškom nultog reda i procesa sa funkcijom prenosa
G(s) = Gh0(s)Gp(s) ⇒ argG(s) = argGh0(s) + arg Gp(s) kako se nadalje funkcija prenosa kola sa zadrškom nultog reda za male vrednosti periode odabiranja može aproksimirati kao
2 22
0
1 1 21 1 1 11
2 2 2
sTsT /
h
sT (sT) /e sT sTG (s) ( e
s s T T
−−
− − + −− = = ≈ − + − ≈
L
L
To nadalje znači da se kolo sa zadrškom nultog reda može aproksimirati kao čisto transportno kašnjenje od T/2.
Kao što je poznato, čisto transportno kašnjenje smanjuje fazu sistema, tako da će implementacija kontinualnog upravljanja pomoću računara nužno dovesti do smanjenja preteka faze sistema u iznosu od
1
2pfTω
∆Φ = −
Budući da promena preteka faze zavisi od perioda odabiranja izvesno je da se period odabiranja može definisati sa gledišta maksimalne dozvoljene promene preteka faze. Iskustvo je pokazalo da dozvoljava da je
0 015 15 0 087 0 26 0 15 0 5pf . rad / sec . rad / sec T . .∆Φ ≈ ÷ = ÷ ⇒ ω ≈ ÷
Ako se nadalje pretpostavi da je propusni opseg približno jednak učestanosti preteka faze tada je
0 10 3 1
2 2 6 20N N.
( )T T
Ω = ω ≈ ω ≈ ÷ ⇒ Ω ≈ ÷ Ω
Ovaj pristup izboru perioda odabiranja je od posebnog interesa ako je upravljanje sistemom projektovano na osnovu zadanog preteka faze.
Potrebno je napomenuti da promena faze koju unosi kolo sa zadrškom nultog reda određuje i maksimalnu granicu periode odabiranja. Naime sistem će doći na granicu stabilnosti ako je perioda odabrana tako da je kašnjenje koje unosi kolo sa zadrškom nultog reda jednako preteku faze sistema
11
2180max pT ( arg(G ( j ))= + ω
ω
PR. 4-3
Posmatra se Nikvistov dijagram sistema sa jediničnom povratnom spregom kod koga je
funkcija prenosa procesa 24
2 12pG (s)s(s )(s )
=+ +
ReG
ImG
-2 -1.5 -1 -0.5 0 0.5 1-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
G
T=0.5
T=1
T=2
T=3.17
ReG
ImG
-2 -1.5 -1 -0.5 0 0.5 1-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
G
T=0.5
T=1
T=2
T=2.57
SL. 4-10 NIKVISTOV DIJAGRAM ZA RAZLI ČITE VREDNOSTI PERIODE ODABIRANJA :
D/A konvertor ( A), Aproksimacija D/A konvertora ( B)
A B
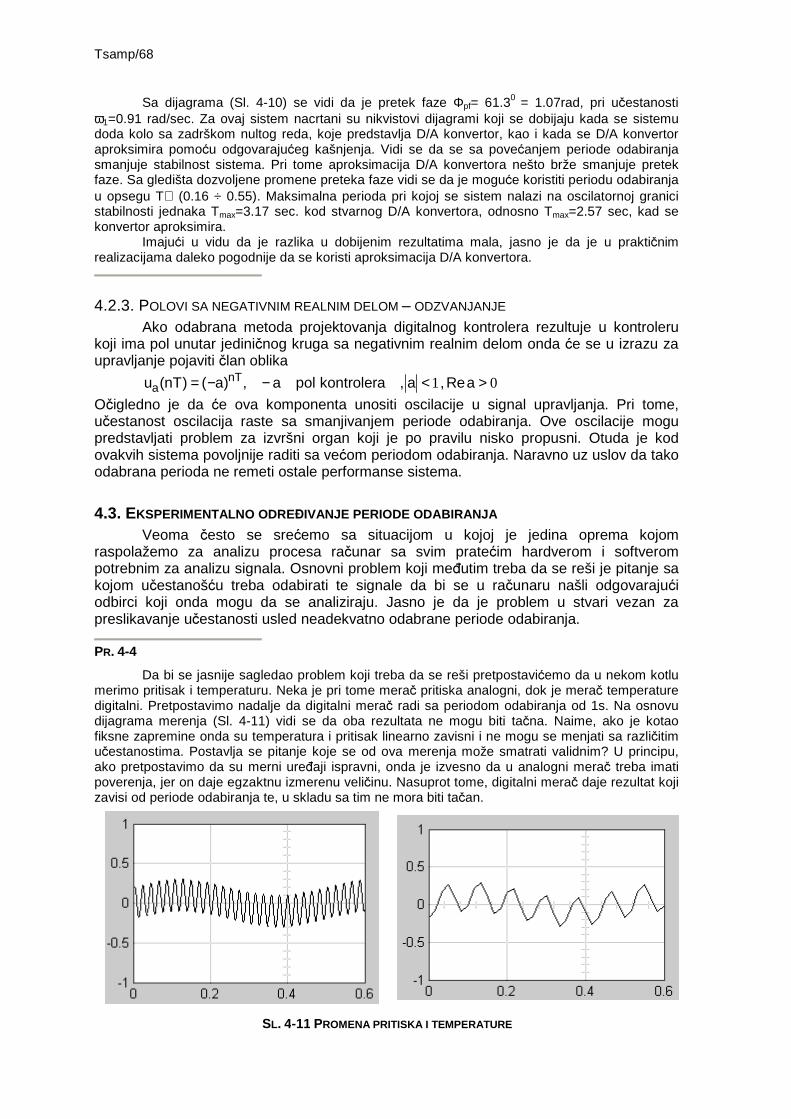
Tsamp/68
Sa dijagrama (Sl. 4-10) se vidi da je pretek faze Φpf= 61.30 = 1.07rad, pri učestanosti ω1=0.91 rad/sec. Za ovaj sistem nacrtani su nikvistovi dijagrami koji se dobijaju kada se sistemu doda kolo sa zadrškom nultog reda, koje predstavlja D/A konvertor, kao i kada se D/A konvertor aproksimira pomoću odgovarajućeg kašnjenja. Vidi se da se sa povećanjem periode odabiranja smanjuje stabilnost sistema. Pri tome aproksimacija D/A konvertora nešto brže smanjuje pretek faze. Sa gledišta dozvoljene promene preteka faze vidi se da je moguće koristiti periodu odabiranja u opsegu T∈ (0.16 ÷ 0.55). Maksimalna perioda pri kojoj se sistem nalazi na oscilatornoj granici stabilnosti jednaka Tmax=3.17 sec. kod stvarnog D/A konvertora, odnosno Tmax=2.57 sec, kad se konvertor aproksimira.
Imajući u vidu da je razlika u dobijenim rezultatima mala, jasno je da je u praktičnim realizacijama daleko pogodnije da se koristi aproksimacija D/A konvertora.
4.2.3. POLOVI SA NEGATIVNIM REALNIM DELOM – ODZVANJANJE Ako odabrana metoda projektovanja digitalnog kontrolera rezultuje u kontroleru
koji ima pol unutar jediničnog kruga sa negativnim realnim delom onda će se u izrazu za upravljanje pojaviti član oblika
1 0nTau (nT) ( a) , a pol kontrolera , a ,Rea= − − < >
Očigledno je da će ova komponenta unositi oscilacije u signal upravljanja. Pri tome, učestanost oscilacija raste sa smanjivanjem periode odabiranja. Ove oscilacije mogu predstavljati problem za izvršni organ koji je po pravilu nisko propusni. Otuda je kod ovakvih sistema povoljnije raditi sa većom periodom odabiranja. Naravno uz uslov da tako odabrana perioda ne remeti ostale performanse sistema.
4.3. EKSPERIMENTALNO ODREĐIVANJE PERIODE ODABIRANJA Veoma često se srećemo sa situacijom u kojoj je jedina oprema kojom
raspolažemo za analizu procesa računar sa svim pratećim hardverom i softverom potrebnim za analizu signala. Osnovni problem koji međutim treba da se reši je pitanje sa kojom učestanošću treba odabirati te signale da bi se u računaru našli odgovarajući odbirci koji onda mogu da se analiziraju. Jasno je da je problem u stvari vezan za preslikavanje učestanosti usled neadekvatno odabrane periode odabiranja.
PR. 4-4
Da bi se jasnije sagledao problem koji treba da se reši pretpostavićemo da u nekom kotlu merimo pritisak i temperaturu. Neka je pri tome merač pritiska analogni, dok je merač temperature digitalni. Pretpostavimo nadalje da digitalni merač radi sa periodom odabiranja od 1s. Na osnovu dijagrama merenja (Sl. 4-11) vidi se da oba rezultata ne mogu biti tačna. Naime, ako je kotao fiksne zapremine onda su temperatura i pritisak linearno zavisni i ne mogu se menjati sa različitim učestanostima. Postavlja se pitanje koje se od ova merenja može smatrati validnim? U principu, ako pretpostavimo da su merni uređaji ispravni, onda je izvesno da u analogni merač treba imati poverenja, jer on daje egzaktnu izmerenu veličinu. Nasuprot tome, digitalni merač daje rezultat koji zavisi od periode odabiranja te, u skladu sa tim ne mora biti tačan.
SL. 4-11 PROMENA PRITISKA I TEMPERATURE
PRITISAK TEMPERATURA
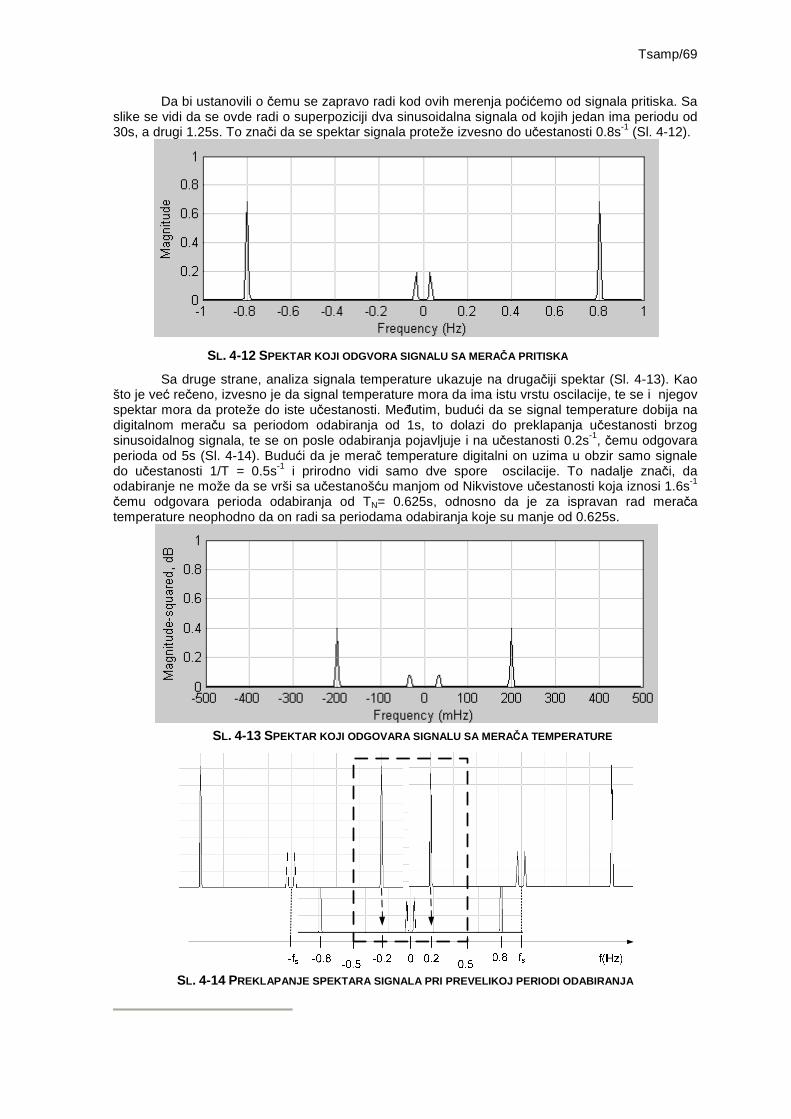
Tsamp/69
Da bi ustanovili o čemu se zapravo radi kod ovih merenja poćićemo od signala pritiska. Sa slike se vidi da se ovde radi o superpoziciji dva sinusoidalna signala od kojih jedan ima periodu od 30s, a drugi 1.25s. To znači da se spektar signala proteže izvesno do učestanosti 0.8s-1 (Sl. 4-12).
Sa druge strane, analiza signala temperature ukazuje na drugačiji spektar (Sl. 4-13). Kao što je već rečeno, izvesno je da signal temperature mora da ima istu vrstu oscilacije, te se i njegov spektar mora da proteže do iste učestanosti. Međutim, budući da se signal temperature dobija na digitalnom meraču sa periodom odabiranja od 1s, to dolazi do preklapanja učestanosti brzog sinusoidalnog signala, te se on posle odabiranja pojavljuje i na učestanosti 0.2s-1, čemu odgovara perioda od 5s (Sl. 4-14). Budući da je merač temperature digitalni on uzima u obzir samo signale do učestanosti 1/T = 0.5s-1 i prirodno vidi samo dve spore oscilacije. To nadalje znači, da odabiranje ne može da se vrši sa učestanošću manjom od Nikvistove učestanosti koja iznosi 1.6s-1 čemu odgovara perioda odabiranja od TN= 0.625s, odnosno da je za ispravan rad merača temperature neophodno da on radi sa periodama odabiranja koje su manje od 0.625s.
SL. 4-14 PREKLAPANJE SPEKTARA SIGNALA PRI PREVELIKOJ PERIODI ODABIRANJA
SL. 4-12 SPEKTAR KOJI ODGVORA SIGNALU SA MERA ČA PRITISKA
SL. 4-13 SPEKTAR KOJI ODGOVARA SIGNALU SA MERA ČA TEMPERATURE
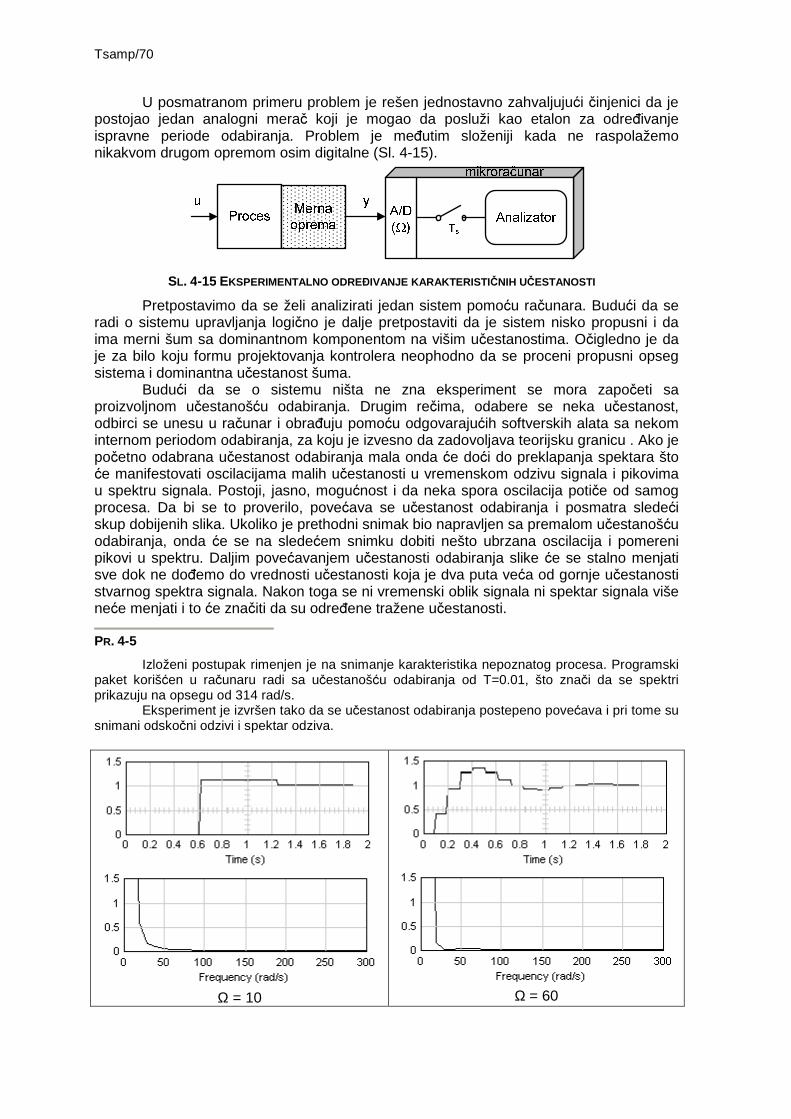
Tsamp/70
U posmatranom primeru problem je rešen jednostavno zahvaljujući činjenici da je postojao jedan analogni merač koji je mogao da posluži kao etalon za određivanje ispravne periode odabiranja. Problem je međutim složeniji kada ne raspolažemo nikakvom drugom opremom osim digitalne (Sl. 4-15).
Pretpostavimo da se želi analizirati jedan sistem pomoću računara. Budući da se radi o sistemu upravljanja logično je dalje pretpostaviti da je sistem nisko propusni i da ima merni šum sa dominantnom komponentom na višim učestanostima. Očigledno je da je za bilo koju formu projektovanja kontrolera neophodno da se proceni propusni opseg sistema i dominantna učestanost šuma.
Budući da se o sistemu ništa ne zna eksperiment se mora započeti sa proizvoljnom učestanošću odabiranja. Drugim rečima, odabere se neka učestanost, odbirci se unesu u računar i obrađuju pomoću odgovarajućih softverskih alata sa nekom internom periodom odabiranja, za koju je izvesno da zadovoljava teorijsku granicu . Ako je početno odabrana učestanost odabiranja mala onda će doći do preklapanja spektara što će manifestovati oscilacijama malih učestanosti u vremenskom odzivu signala i pikovima u spektru signala. Postoji, jasno, mogućnost i da neka spora oscilacija potiče od samog procesa. Da bi se to proverilo, povećava se učestanost odabiranja i posmatra sledeći skup dobijenih slika. Ukoliko je prethodni snimak bio napravljen sa premalom učestanošću odabiranja, onda će se na sledećem snimku dobiti nešto ubrzana oscilacija i pomereni pikovi u spektru. Daljim povećavanjem učestanosti odabiranja slike će se stalno menjati sve dok ne dođemo do vrednosti učestanosti koja je dva puta veća od gornje učestanosti stvarnog spektra signala. Nakon toga se ni vremenski oblik signala ni spektar signala više neće menjati i to će značiti da su određene tražene učestanosti.
PR. 4-5
Izloženi postupak rimenjen je na snimanje karakteristika nepoznatog procesa. Programski paket korišćen u računaru radi sa učestanošću odabiranja od T=0.01, što znači da se spektri prikazuju na opsegu od 314 rad/s.
Eksperiment je izvršen tako da se učestanost odabiranja postepeno povećava i pri tome su snimani odskočni odzivi i spektar odziva.
Ω = 10
Ω = 60
SL. 4-15 EKSPERIMENTALNO ODREĐIVANJE KARAKTERISTI ČNIH UČESTANOSTI
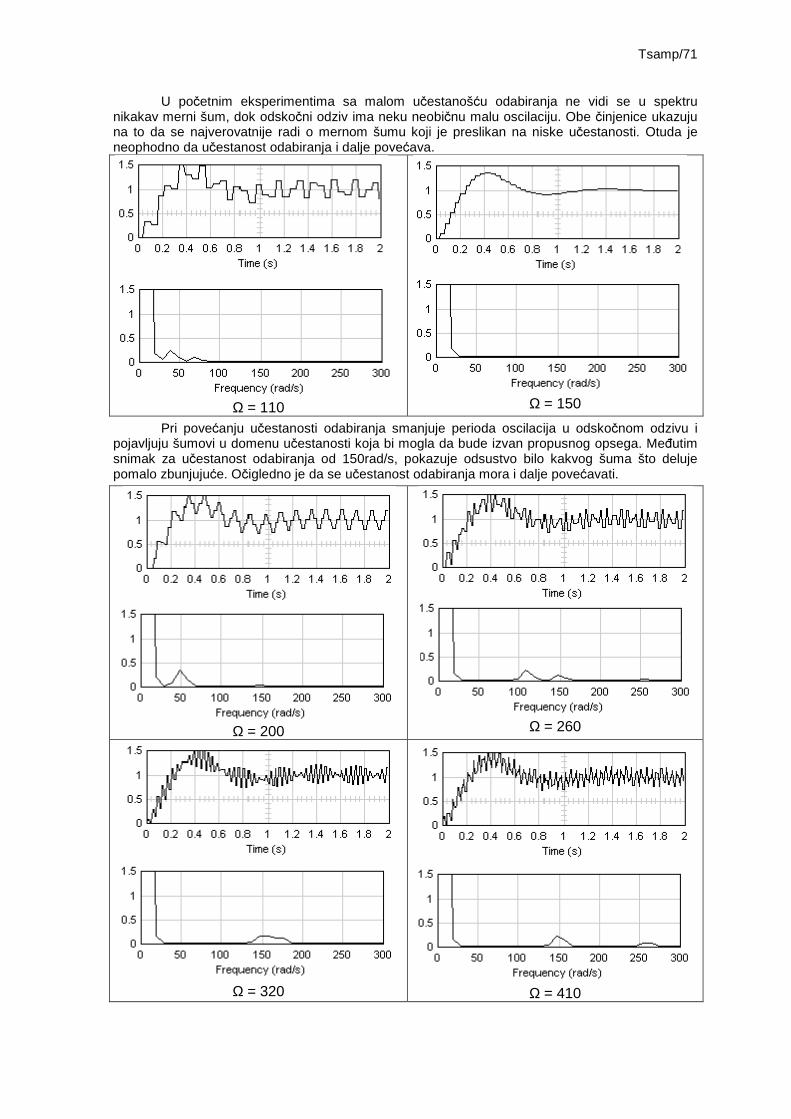
Tsamp/71
U početnim eksperimentima sa malom učestanošću odabiranja ne vidi se u spektru nikakav merni šum, dok odskočni odziv ima neku neobičnu malu oscilaciju. Obe činjenice ukazuju na to da se najverovatnije radi o mernom šumu koji je preslikan na niske učestanosti. Otuda je neophodno da učestanost odabiranja i dalje povećava.
Ω = 110
Ω = 150
Pri povećanju učestanosti odabiranja smanjuje perioda oscilacija u odskočnom odzivu i pojavljuju šumovi u domenu učestanosti koja bi mogla da bude izvan propusnog opsega. Međutim snimak za učestanost odabiranja od 150rad/s, pokazuje odsustvo bilo kakvog šuma što deluje pomalo zbunjujuće. Očigledno je da se učestanost odabiranja mora i dalje povećavati.
Ω = 200
Ω = 260
Ω = 320
Ω = 410
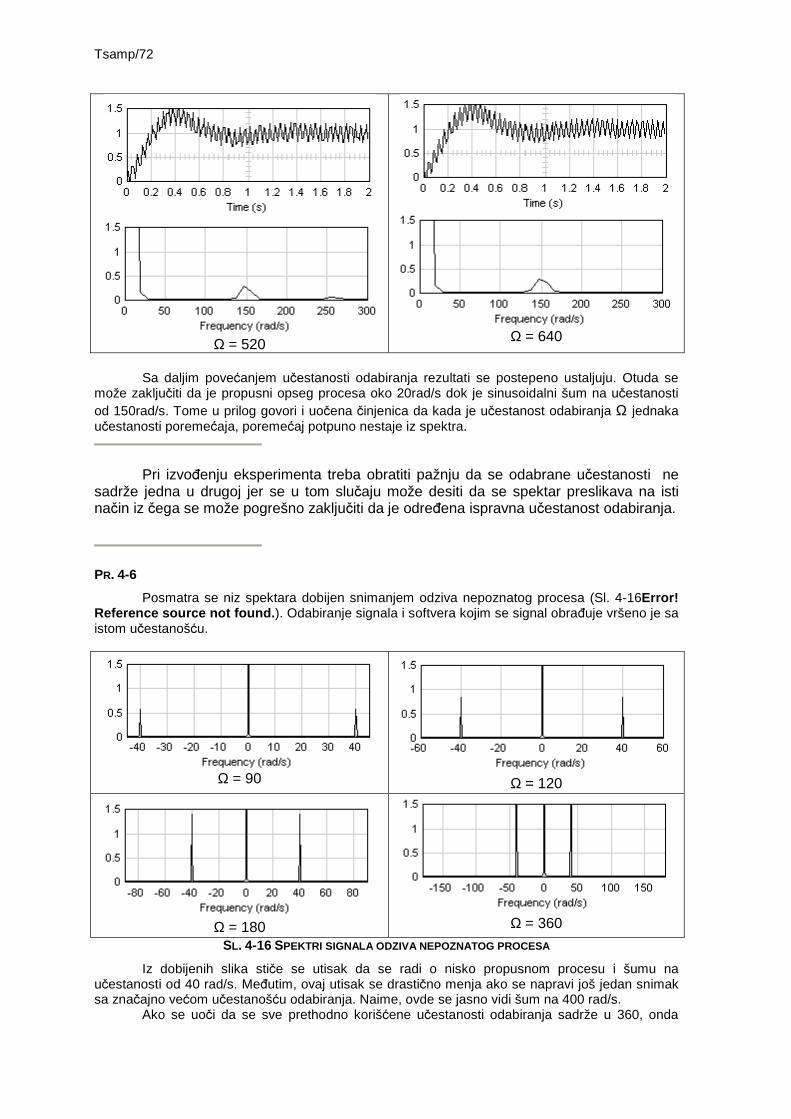
Tsamp/72
Ω = 520
Ω = 640
Sa daljim povećanjem učestanosti odabiranja rezultati se postepeno ustaljuju. Otuda se
može zaključiti da je propusni opseg procesa oko 20rad/s dok je sinusoidalni šum na učestanosti od 150rad/s. Tome u prilog govori i uočena činjenica da kada je učestanost odabiranja Ω jednaka učestanosti poremećaja, poremećaj potpuno nestaje iz spektra.
Pri izvođenju eksperimenta treba obratiti pažnju da se odabrane učestanosti ne
sadrže jedna u drugoj jer se u tom slučaju može desiti da se spektar preslikava na isti način iz čega se može pogrešno zaključiti da je određena ispravna učestanost odabiranja.
PR. 4-6
Posmatra se niz spektara dobijen snimanjem odziva nepoznatog procesa (Sl. 4-16Error! Reference source not found. ). Odabiranje signala i softvera kojim se signal obrađuje vršeno je sa istom učestanošću.
Ω = 90
Ω = 120
Ω = 180
Ω = 360
SL. 4-16 SPEKTRI SIGNALA ODZIVA NEPOZNATOG PROCESA
Iz dobijenih slika stiče se utisak da se radi o nisko propusnom procesu i šumu na učestanosti od 40 rad/s. Međutim, ovaj utisak se drastično menja ako se napravi još jedan snimak sa značajno većom učestanošću odabiranja. Naime, ovde se jasno vidi šum na 400 rad/s.
Ako se uoči da se sve prethodno korišćene učestanosti odabiranja sadrže u 360, onda
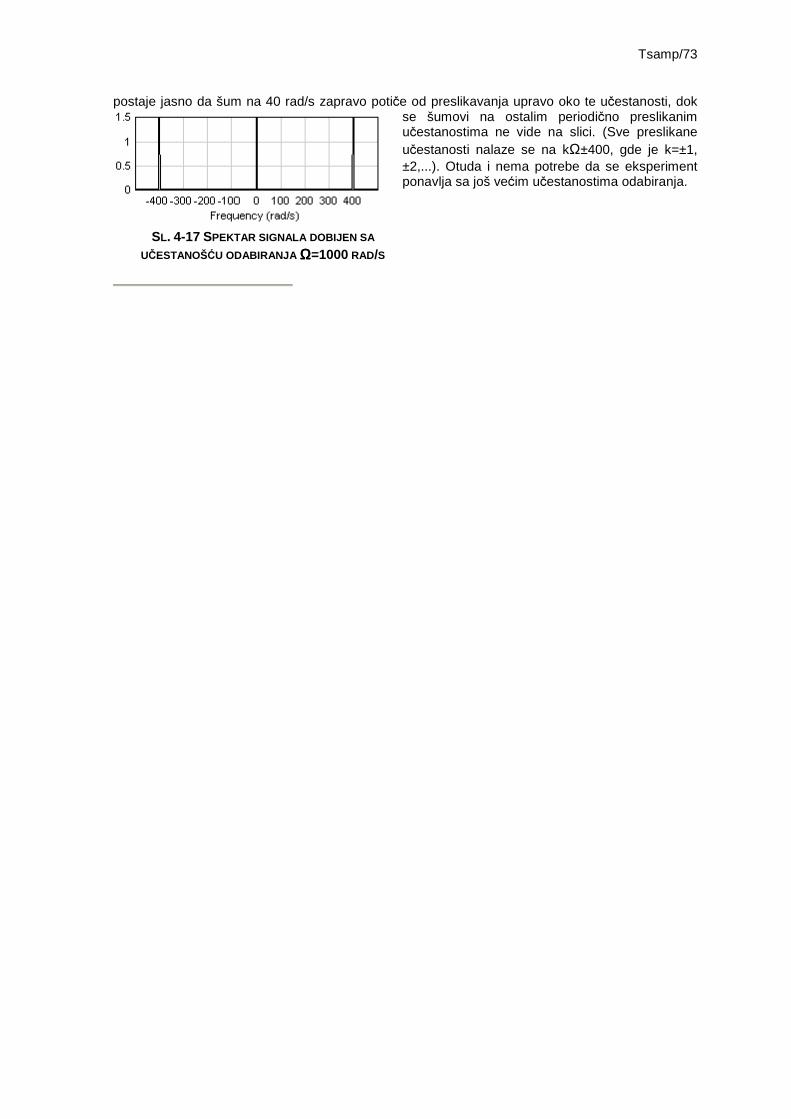
Tsamp/73
postaje jasno da šum na 40 rad/s zapravo potiče od preslikavanja upravo oko te učestanosti, dok se šumovi na ostalim periodično preslikanim učestanostima ne vide na slici. (Sve preslikane učestanosti nalaze se na kΩ±400, gde je k=±1, ±2,...). Otuda i nema potrebe da se eksperiment ponavlja sa još većim učestanostima odabiranja.
SL. 4-17 SPEKTAR SIGNALA DOBIJEN SA
UČESTANOŠĆU ODABIRANJA ΩΩΩΩ=1000 RAD/S

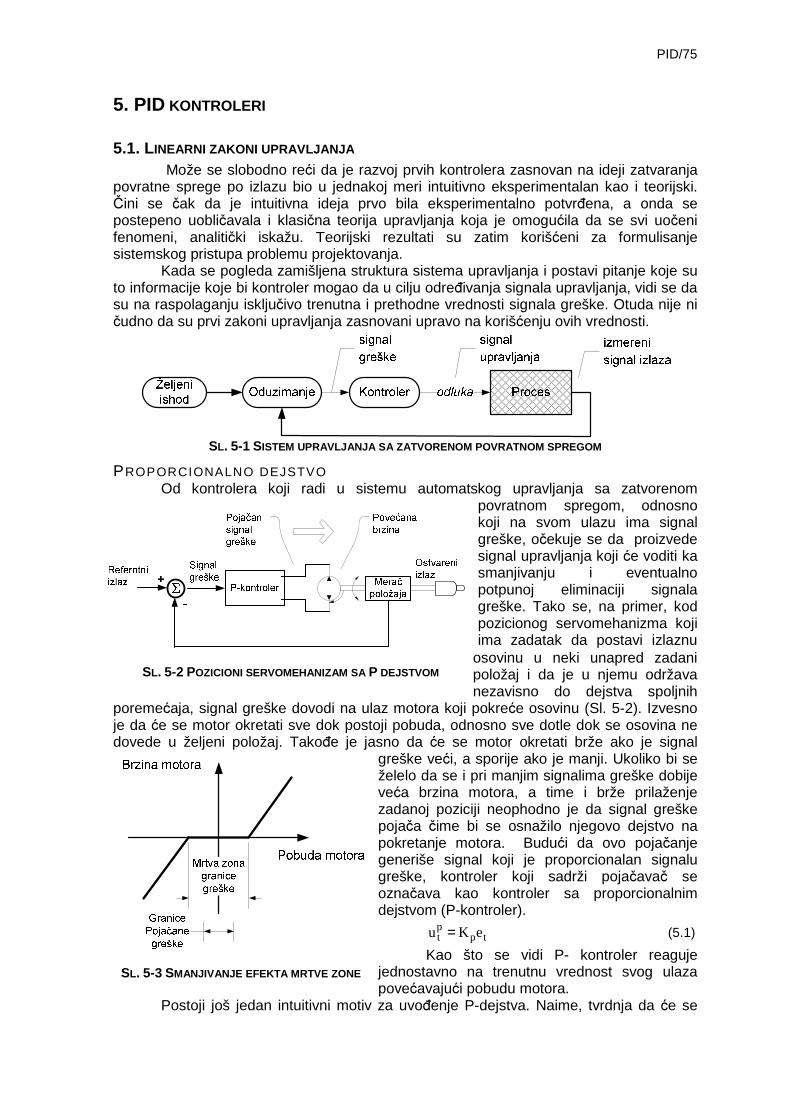
PID/75
5. PID KONTROLERI
5.1. LINEARNI ZAKONI UPRAVLJANJA Može se slobodno reći da je razvoj prvih kontrolera zasnovan na ideji zatvaranja
povratne sprege po izlazu bio u jednakoj meri intuitivno eksperimentalan kao i teorijski. Čini se čak da je intuitivna ideja prvo bila eksperimentalno potvrđena, a onda se postepeno uobličavala i klasična teorija upravljanja koja je omogućila da se svi uočeni fenomeni, analitički iskažu. Teorijski rezultati su zatim korišćeni za formulisanje sistemskog pristupa problemu projektovanja.
Kada se pogleda zamišljena struktura sistema upravljanja i postavi pitanje koje su to informacije koje bi kontroler mogao da u cilju određivanja signala upravljanja, vidi se da su na raspolaganju isključivo trenutna i prethodne vrednosti signala greške. Otuda nije ni čudno da su prvi zakoni upravljanja zasnovani upravo na korišćenju ovih vrednosti.
SL. 5-1 SISTEM UPRAVLJANJA SA ZATVORENOM POVRATNOM SPREGOM
PROPORCIONALNO DEJSTVO Od kontrolera koji radi u sistemu automatskog upravljanja sa zatvorenom
povratnom spregom, odnosno koji na svom ulazu ima signal greške, očekuje se da proizvede signal upravljanja koji će voditi ka smanjivanju i eventualno potpunoj eliminaciji signala greške. Tako se, na primer, kod pozicionog servomehanizma koji ima zadatak da postavi izlaznu
osovinu u neki unapred zadani položaj i da je u njemu održava nezavisno do dejstva spoljnih
poremećaja, signal greške dovodi na ulaz motora koji pokreće osovinu (Sl. 5-2). Izvesno je da će se motor okretati sve dok postoji pobuda, odnosno sve dotle dok se osovina ne dovede u željeni položaj. Takođe je jasno da će se motor okretati brže ako je signal
greške veći, a sporije ako je manji. Ukoliko bi se želelo da se i pri manjim signalima greške dobije veća brzina motora, a time i brže prilaženje zadanoj poziciji neophodno je da signal greške pojača čime bi se osnažilo njegovo dejstvo na pokretanje motora. Budući da ovo pojačanje generiše signal koji je proporcionalan signalu greške, kontroler koji sadrži pojačavač se označava kao kontroler sa proporcionalnim dejstvom (P-kontroler).
pt p tu K e= (5.1)
Kao što se vidi P- kontroler reaguje jednostavno na trenutnu vrednost svog ulaza povećavajući pobudu motora.
Postoji još jedan intuitivni motiv za uvođenje P-dejstva. Naime, tvrdnja da će se
SL. 5-2 POZICIONI SERVOMEHANIZAM SA P DEJSTVOM
SL. 5-3 SMANJIVANJE EFEKTA MRTVE ZONE
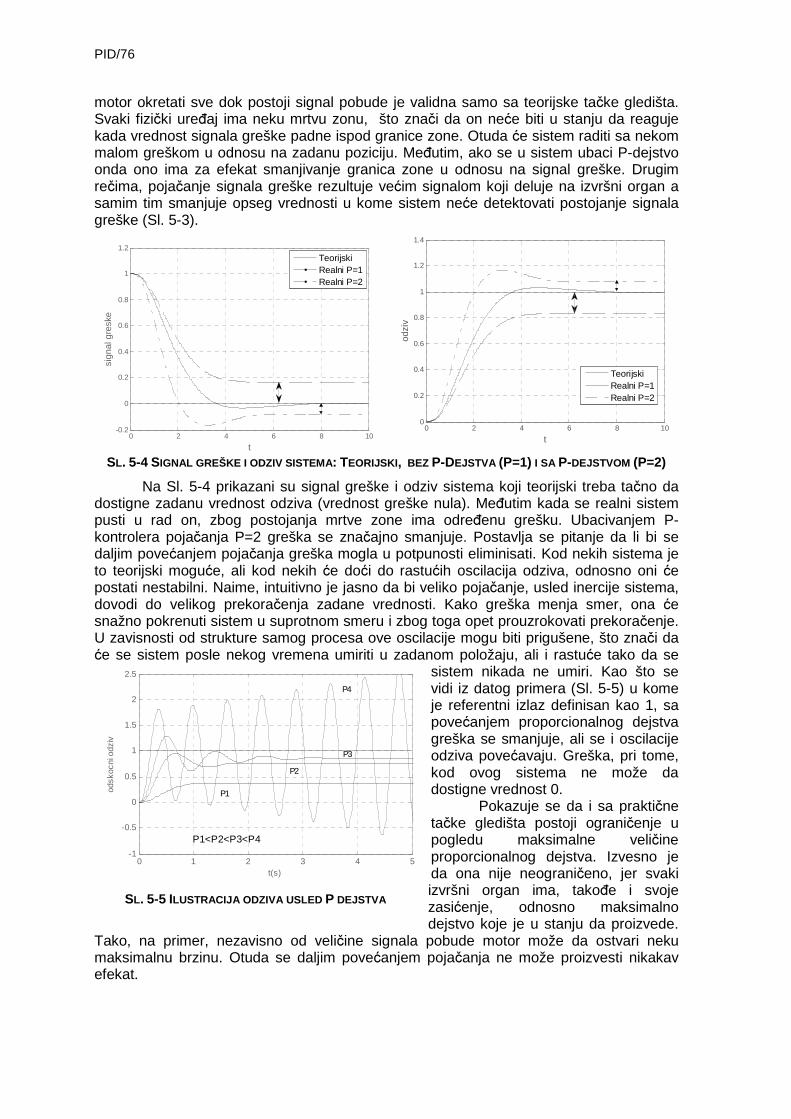
PID/76
motor okretati sve dok postoji signal pobude je validna samo sa teorijske tačke gledišta. Svaki fizički uređaj ima neku mrtvu zonu, što znači da on neće biti u stanju da reaguje kada vrednost signala greške padne ispod granice zone. Otuda će sistem raditi sa nekom malom greškom u odnosu na zadanu poziciju. Međutim, ako se u sistem ubaci P-dejstvo onda ono ima za efekat smanjivanje granica zone u odnosu na signal greške. Drugim rečima, pojačanje signala greške rezultuje većim signalom koji deluje na izvršni organ a samim tim smanjuje opseg vrednosti u kome sistem neće detektovati postojanje signala greške (Sl. 5-3).
SL. 5-4 SIGNAL GREŠKE I ODZIV SISTEMA : TEORIJSKI , BEZ P-DEJSTVA (P=1) I SA P-DEJSTVOM (P=2)
Na Sl. 5-4 prikazani su signal greške i odziv sistema koji teorijski treba tačno da dostigne zadanu vrednost odziva (vrednost greške nula). Međutim kada se realni sistem pusti u rad on, zbog postojanja mrtve zone ima određenu grešku. Ubacivanjem P-kontrolera pojačanja P=2 greška se značajno smanjuje. Postavlja se pitanje da li bi se daljim povećanjem pojačanja greška mogla u potpunosti eliminisati. Kod nekih sistema je to teorijski moguće, ali kod nekih će doći do rastućih oscilacija odziva, odnosno oni će postati nestabilni. Naime, intuitivno je jasno da bi veliko pojačanje, usled inercije sistema, dovodi do velikog prekoračenja zadane vrednosti. Kako greška menja smer, ona će snažno pokrenuti sistem u suprotnom smeru i zbog toga opet prouzrokovati prekoračenje. U zavisnosti od strukture samog procesa ove oscilacije mogu biti prigušene, što znači da će se sistem posle nekog vremena umiriti u zadanom položaju, ali i rastuće tako da se
sistem nikada ne umiri. Kao što se vidi iz datog primera (Sl. 5-5) u kome je referentni izlaz definisan kao 1, sa povećanjem proporcionalnog dejstva greška se smanjuje, ali se i oscilacije odziva povećavaju. Greška, pri tome, kod ovog sistema ne može da dostigne vrednost 0.
Pokazuje se da i sa praktične tačke gledišta postoji ograničenje u pogledu maksimalne veličine proporcionalnog dejstva. Izvesno je da ona nije neograničeno, jer svaki izvršni organ ima, takođe i svoje zasićenje, odnosno maksimalno dejstvo koje je u stanju da proizvede.
Tako, na primer, nezavisno od veličine signala pobude motor može da ostvari neku maksimalnu brzinu. Otuda se daljim povećanjem pojačanja ne može proizvesti nikakav efekat.
0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
sign
al g
resk
e
TeorijskiRealni P=1Realni P=2
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
t
odzi
v
TeorijskiRealni P=1Realni P=2
SL. 5-5 ILUSTRACIJA ODZIVA USLED P DEJSTVA
0 1 2 3 4 5-1
-0.5
0
0.5
1
1.5
2
2.5
t(s)
odsk
ocni
odz
iv
P1<P2<P3<P4
P1
P2
P4
P3
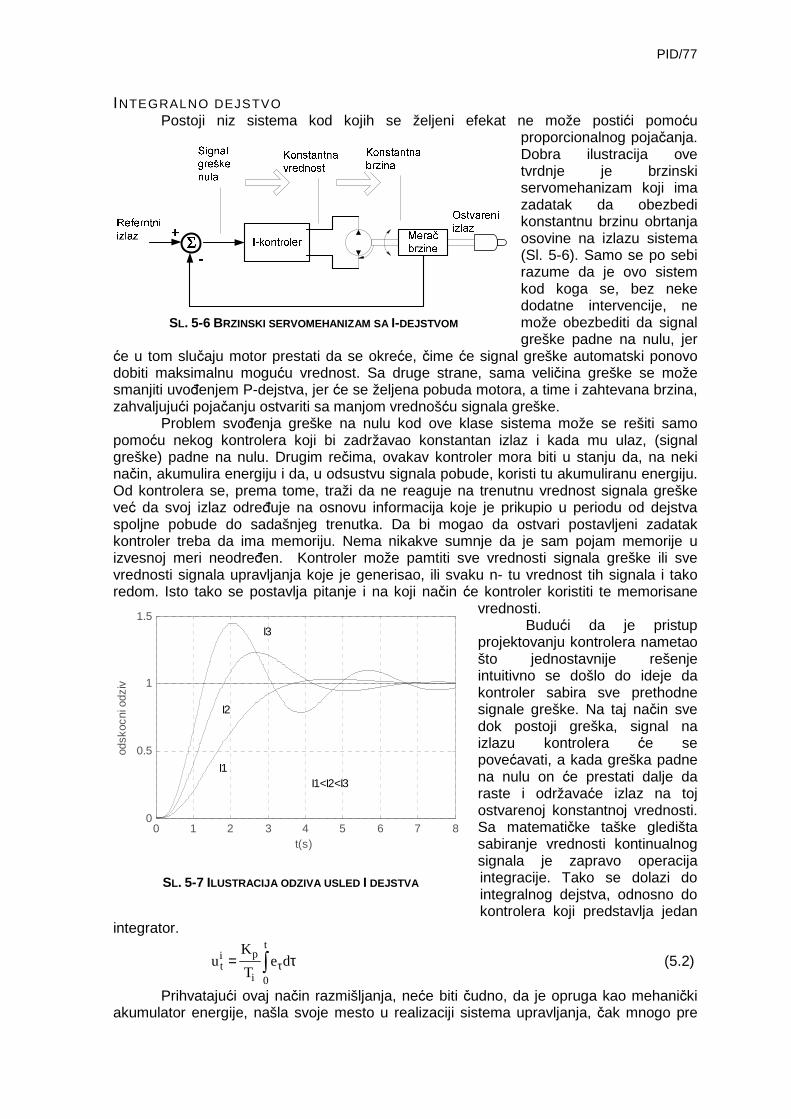
PID/77
INTEGRALNO DEJSTVO Postoji niz sistema kod kojih se željeni efekat ne može postići pomoću
proporcionalnog pojačanja. Dobra ilustracija ove tvrdnje je brzinski servomehanizam koji ima zadatak da obezbedi konstantnu brzinu obrtanja osovine na izlazu sistema (Sl. 5-6). Samo se po sebi razume da je ovo sistem kod koga se, bez neke dodatne intervencije, ne može obezbediti da signal greške padne na nulu, jer
će u tom slučaju motor prestati da se okreće, čime će signal greške automatski ponovo dobiti maksimalnu moguću vrednost. Sa druge strane, sama veličina greške se može smanjiti uvođenjem P-dejstva, jer će se željena pobuda motora, a time i zahtevana brzina, zahvaljujući pojačanju ostvariti sa manjom vrednošću signala greške.
Problem svođenja greške na nulu kod ove klase sistema može se rešiti samo pomoću nekog kontrolera koji bi zadržavao konstantan izlaz i kada mu ulaz, (signal greške) padne na nulu. Drugim rečima, ovakav kontroler mora biti u stanju da, na neki način, akumulira energiju i da, u odsustvu signala pobude, koristi tu akumuliranu energiju. Od kontrolera se, prema tome, traži da ne reaguje na trenutnu vrednost signala greške već da svoj izlaz određuje na osnovu informacija koje je prikupio u periodu od dejstva spoljne pobude do sadašnjeg trenutka. Da bi mogao da ostvari postavljeni zadatak kontroler treba da ima memoriju. Nema nikakve sumnje da je sam pojam memorije u izvesnoj meri neodređen. Kontroler može pamtiti sve vrednosti signala greške ili sve vrednosti signala upravljanja koje je generisao, ili svaku n- tu vrednost tih signala i tako redom. Isto tako se postavlja pitanje i na koji način će kontroler koristiti te memorisane
vrednosti. Budući da je pristup
projektovanju kontrolera nametao što jednostavnije rešenje intuitivno se došlo do ideje da kontroler sabira sve prethodne signale greške. Na taj način sve dok postoji greška, signal na izlazu kontrolera će se povećavati, a kada greška padne na nulu on će prestati dalje da raste i održavaće izlaz na toj ostvarenoj konstantnoj vrednosti. Sa matematičke taške gledišta sabiranje vrednosti kontinualnog signala je zapravo operacija integracije. Tako se dolazi do integralnog dejstva, odnosno do kontrolera koji predstavlja jedan
integrator.
t
pit
i 0
Ku e d
T τ= τ∫ (5.2)
Prihvatajući ovaj način razmišljanja, neće biti čudno, da je opruga kao mehanički akumulator energije, našla svoje mesto u realizaciji sistema upravljanja, čak mnogo pre
SL. 5-6 BRZINSKI SERVOMEHANIZAM SA I-DEJSTVOM
SL. 5-7 ILUSTRACIJA ODZIVA USLED I DEJSTVA
0 1 2 3 4 5 6 7 80
0.5
1
1.5
t(s)
odsk
ocni
odz
iv
I2
I1
I3
I1<I2<I3
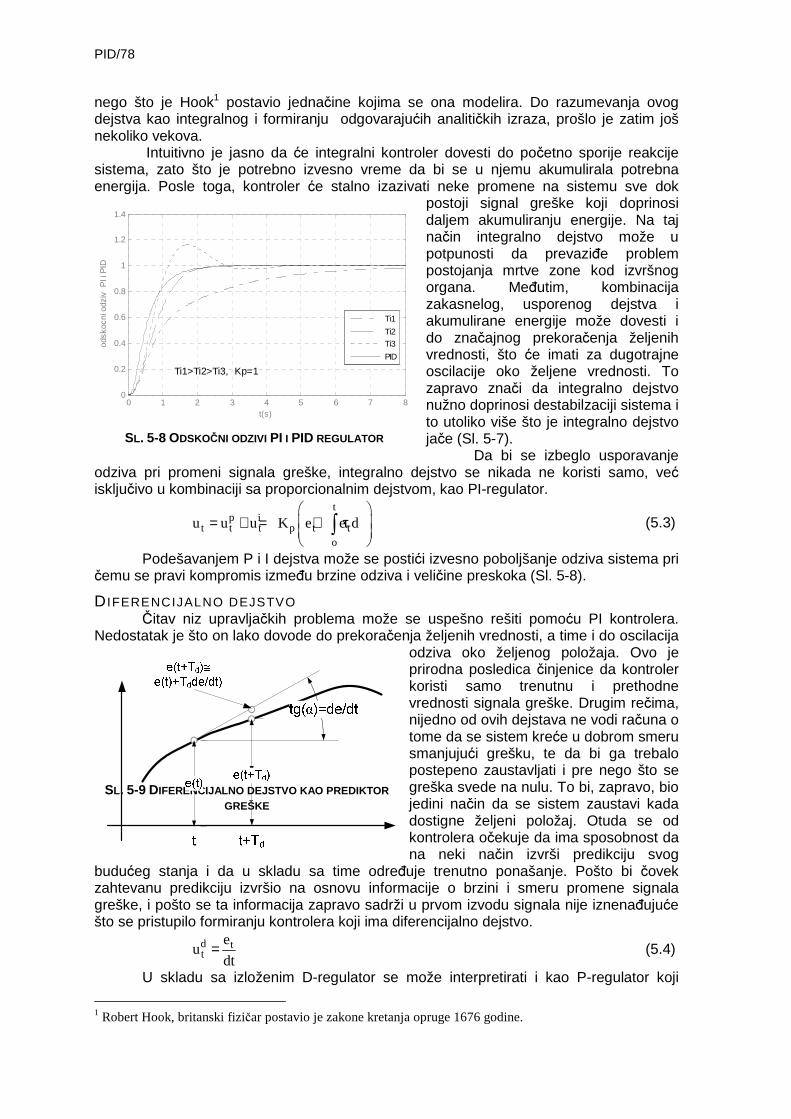
PID/78
nego što je Hook1 postavio jednačine kojima se ona modelira. Do razumevanja ovog dejstva kao integralnog i formiranju odgovarajućih analitičkih izraza, prošlo je zatim još nekoliko vekova.
Intuitivno je jasno da će integralni kontroler dovesti do početno sporije reakcije sistema, zato što je potrebno izvesno vreme da bi se u njemu akumulirala potrebna energija. Posle toga, kontroler će stalno izazivati neke promene na sistemu sve dok
postoji signal greške koji doprinosi daljem akumuliranju energije. Na taj način integralno dejstvo može u potpunosti da prevaziđe problem postojanja mrtve zone kod izvršnog organa. Međutim, kombinacija zakasnelog, usporenog dejstva i akumulirane energije može dovesti i do značajnog prekoračenja željenih vrednosti, što će imati za dugotrajne oscilacije oko željene vrednosti. To zapravo znači da integralno dejstvo nužno doprinosi destabilzaciji sistema i to utoliko više što je integralno dejstvo jače (Sl. 5-7).
Da bi se izbeglo usporavanje odziva pri promeni signala greške, integralno dejstvo se nikada ne koristi samo, već isključivo u kombinaciji sa proporcionalnim dejstvom, kao PI-regulator.
t
p it t t p t
o
u u u K e e dτ = + = + τ
∫ (5.3)
Podešavanjem P i I dejstva može se postići izvesno poboljšanje odziva sistema pri čemu se pravi kompromis između brzine odziva i veličine preskoka (Sl. 5-8).
D IFERENCIJALNO DEJSTVO Čitav niz upravljačkih problema može se uspešno rešiti pomoću PI kontrolera.
Nedostatak je što on lako dovode do prekoračenja željenih vrednosti, a time i do oscilacija odziva oko željenog položaja. Ovo je prirodna posledica činjenice da kontroler koristi samo trenutnu i prethodne vrednosti signala greške. Drugim rečima, nijedno od ovih dejstava ne vodi računa o tome da se sistem kreće u dobrom smeru smanjujući grešku, te da bi ga trebalo postepeno zaustavljati i pre nego što se greška svede na nulu. To bi, zapravo, bio jedini način da se sistem zaustavi kada dostigne željeni položaj. Otuda se od kontrolera očekuje da ima sposobnost da na neki način izvrši predikciju svog
budućeg stanja i da u skladu sa time određuje trenutno ponašanje. Pošto bi čovek zahtevanu predikciju izvršio na osnovu informacije o brzini i smeru promene signala greške, i pošto se ta informacija zapravo sadrži u prvom izvodu signala nije iznenađujuće što se pristupilo formiranju kontrolera koji ima diferencijalno dejstvo.
d tt
eu
dt= (5.4)
U skladu sa izloženim D-regulator se može interpretirati i kao P-regulator koji
1 Robert Hook, britanski fizičar postavio je zakone kretanja opruge 1676 godine.
SL. 5-8 ODSKOČNI ODZIVI PI I PID REGULATOR
SL. 5-9 DIFERENCIJALNO DEJSTVO KAO PREDIKTOR GREŠKE
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4
t(s)
odsk
ocni
odz
iv P
I i P
ID
Ti1
Ti2
Ti3
PID
Ti1>Ti2>Ti3, Kp=1
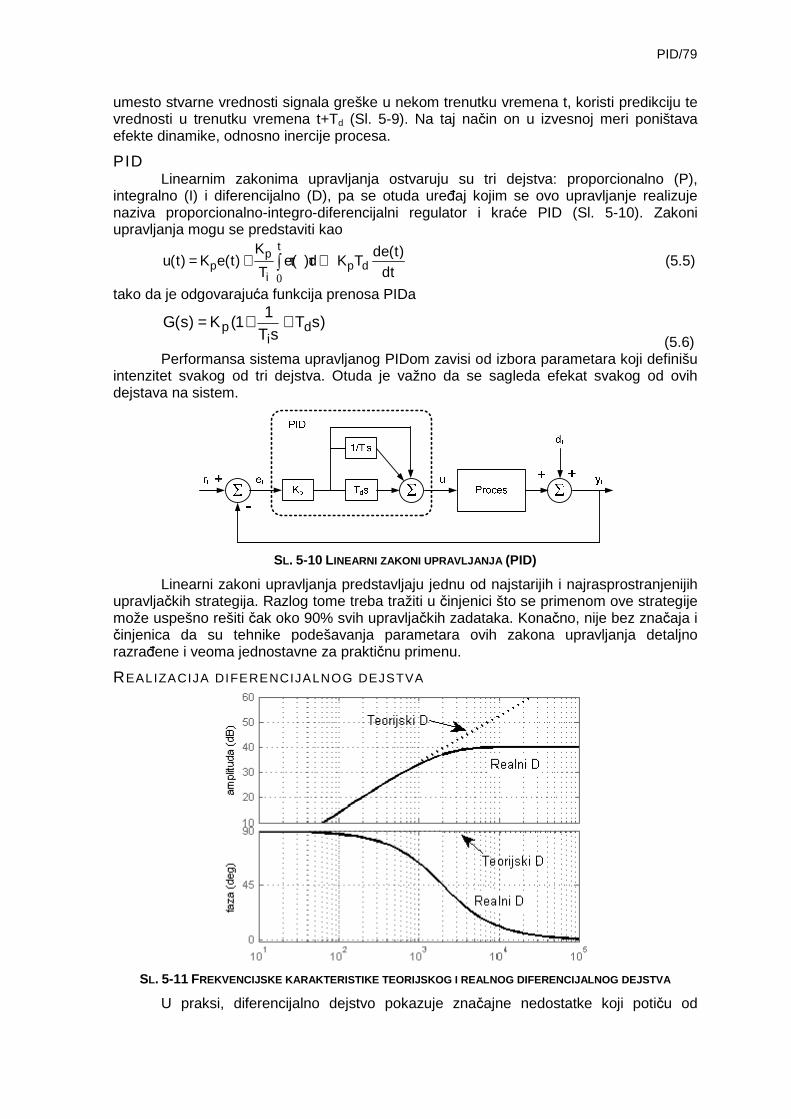
PID/79
umesto stvarne vrednosti signala greške u nekom trenutku vremena t, koristi predikciju te vrednosti u trenutku vremena t+Td (Sl. 5-9). Na taj način on u izvesnoj meri poništava efekte dinamike, odnosno inercije procesa.
PID Linearnim zakonima upravljanja ostvaruju su tri dejstva: proporcionalno (P),
integralno (I) i diferencijalno (D), pa se otuda uređaj kojim se ovo upravljanje realizuje naziva proporcionalno-integro-diferencijalni regulator i kraće PID (Sl. 5-10). Zakoni upravljanja mogu se predstaviti kao
0
tp
p p di
K de(t)u(t) K e(t) e( )d K T
T dt= + τ τ +∫ (5.5)
tako da je odgovarajuća funkcija prenosa PIDa
)sTsT
11(K)s(G d
ip ++=
(5.6) Performansa sistema upravljanog PIDom zavisi od izbora parametara koji definišu
intenzitet svakog od tri dejstva. Otuda je važno da se sagleda efekat svakog od ovih dejstava na sistem.
SL. 5-10 LINEARNI ZAKONI UPRAVLJANJA (PID)
Linearni zakoni upravljanja predstavljaju jednu od najstarijih i najrasprostranjenijih upravljačkih strategija. Razlog tome treba tražiti u činjenici što se primenom ove strategije može uspešno rešiti čak oko 90% svih upravljačkih zadataka. Konačno, nije bez značaja i činjenica da su tehnike podešavanja parametara ovih zakona upravljanja detaljno razrađene i veoma jednostavne za praktičnu primenu.
REALIZACIJA DIFERENCIJALNOG DEJSTVA
SL. 5-11 FREKVENCIJSKE KARAKTERISTIKE TEORIJSKOG I REALNOG DI FERENCIJALNOG DEJSTVA
U praksi, diferencijalno dejstvo pokazuje značajne nedostatke koji potiču od
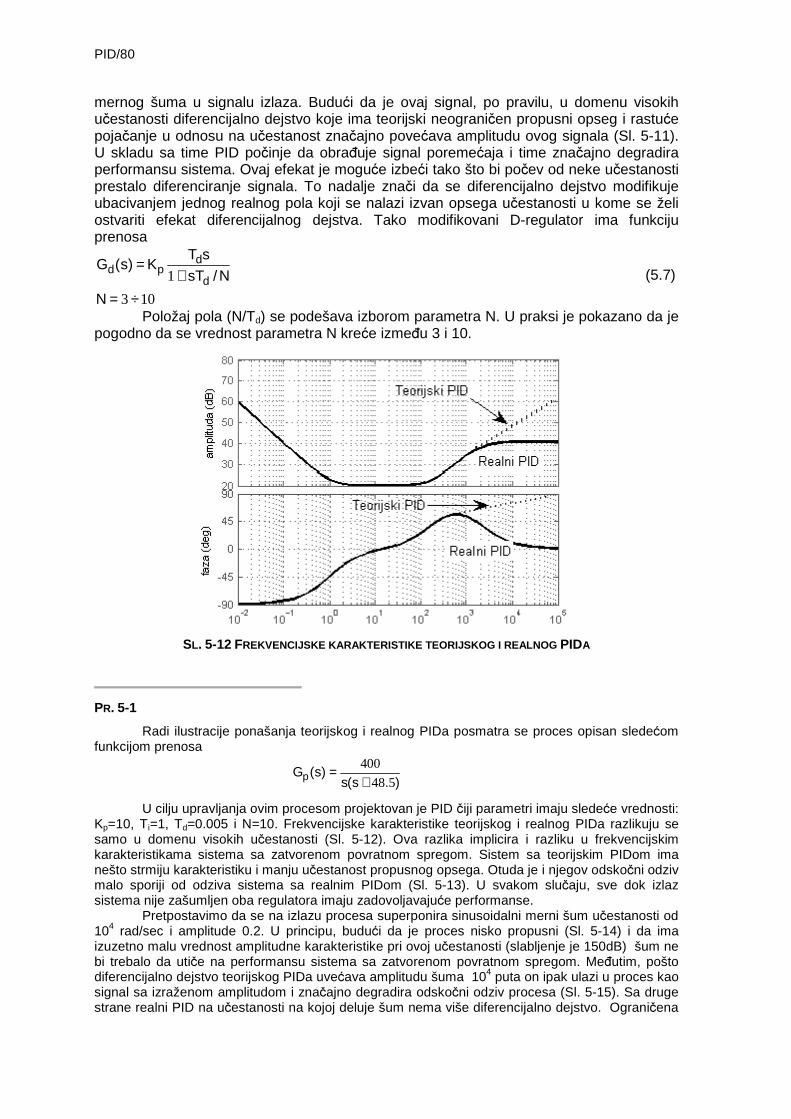
PID/80
mernog šuma u signalu izlaza. Budući da je ovaj signal, po pravilu, u domenu visokih učestanosti diferencijalno dejstvo koje ima teorijski neograničen propusni opseg i rastuće pojačanje u odnosu na učestanost značajno povećava amplitudu ovog signala (Sl. 5-11). U skladu sa time PID počinje da obrađuje signal poremećaja i time značajno degradira performansu sistema. Ovaj efekat je moguće izbeći tako što bi počev od neke učestanosti prestalo diferenciranje signala. To nadalje znači da se diferencijalno dejstvo modifikuje ubacivanjem jednog realnog pola koji se nalazi izvan opsega učestanosti u kome se želi ostvariti efekat diferencijalnog dejstva. Tako modifikovani D-regulator ima funkciju prenosa
1
3 10
dd p
d
T sG (s) K
sT /N
N
=+
= ÷
(5.7)
Položaj pola (N/Td) se podešava izborom parametra N. U praksi je pokazano da je pogodno da se vrednost parametra N kreće između 3 i 10.
SL. 5-12 FREKVENCIJSKE KARAKTERISTIKE TEORIJSKOG I REALNOG PIDA
PR. 5-1
Radi ilustracije ponašanja teorijskog i realnog PIDa posmatra se proces opisan sledećom funkcijom prenosa
400
48 5pG (s)s(s . )
=+
U cilju upravljanja ovim procesom projektovan je PID čiji parametri imaju sledeće vrednosti: Kp=10, Ti=1, Td=0.005 i N=10. Frekvencijske karakteristike teorijskog i realnog PIDa razlikuju se samo u domenu visokih učestanosti (Sl. 5-12). Ova razlika implicira i razliku u frekvencijskim karakteristikama sistema sa zatvorenom povratnom spregom. Sistem sa teorijskim PIDom ima nešto strmiju karakteristiku i manju učestanost propusnog opsega. Otuda je i njegov odskočni odziv malo sporiji od odziva sistema sa realnim PIDom (Sl. 5-13). U svakom slučaju, sve dok izlaz sistema nije zašumljen oba regulatora imaju zadovoljavajuće performanse.
Pretpostavimo da se na izlazu procesa superponira sinusoidalni merni šum učestanosti od 104 rad/sec i amplitude 0.2. U principu, budući da je proces nisko propusni (Sl. 5-14) i da ima izuzetno malu vrednost amplitudne karakteristike pri ovoj učestanosti (slabljenje je 150dB) šum ne bi trebalo da utiče na performansu sistema sa zatvorenom povratnom spregom. Međutim, pošto diferencijalno dejstvo teorijskog PIDa uvećava amplitudu šuma 104 puta on ipak ulazi u proces kao signal sa izraženom amplitudom i značajno degradira odskočni odziv procesa (Sl. 5-15). Sa druge strane realni PID na učestanosti na kojoj deluje šum nema više diferencijalno dejstvo. Ograničena
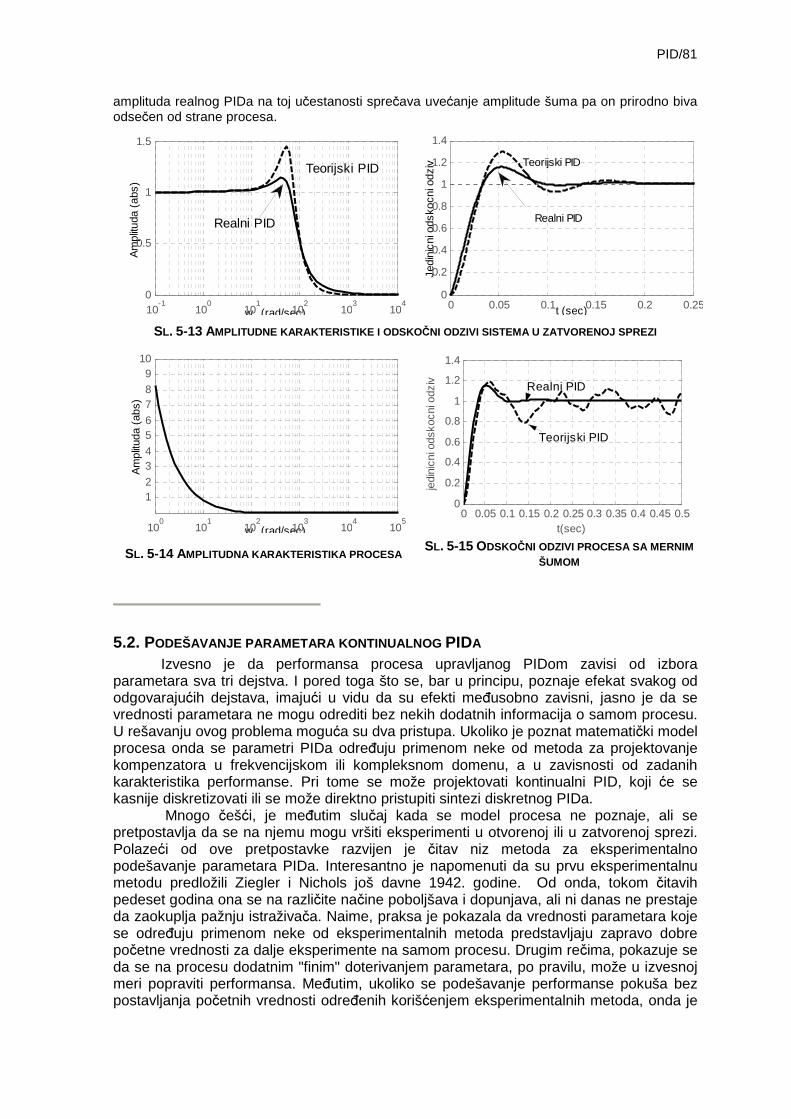
PID/81
amplituda realnog PIDa na toj učestanosti sprečava uvećanje amplitude šuma pa on prirodno biva odsečen od strane procesa.
SL. 5-13 AMPLITUDNE KARAKTERISTIKE I ODSKO ČNI ODZIVI SISTEMA U ZATVORENOJ SPREZI
SL. 5-14 AMPLITUDNA KARAKTERISTIKA PROCESA SL. 5-15 ODSKOČNI ODZIVI PROCESA SA MERNIM
ŠUMOM
5.2. PODEŠAVANJE PARAMETARA KONTINUALNOG PIDA Izvesno je da performansa procesa upravljanog PIDom zavisi od izbora
parametara sva tri dejstva. I pored toga što se, bar u principu, poznaje efekat svakog od odgovarajućih dejstava, imajući u vidu da su efekti međusobno zavisni, jasno je da se vrednosti parametara ne mogu odrediti bez nekih dodatnih informacija o samom procesu. U rešavanju ovog problema moguća su dva pristupa. Ukoliko je poznat matematički model procesa onda se parametri PIDa određuju primenom neke od metoda za projektovanje kompenzatora u frekvencijskom ili kompleksnom domenu, a u zavisnosti od zadanih karakteristika performanse. Pri tome se može projektovati kontinualni PID, koji će se kasnije diskretizovati ili se može direktno pristupiti sintezi diskretnog PIDa.
Mnogo češći, je međutim slučaj kada se model procesa ne poznaje, ali se pretpostavlja da se na njemu mogu vršiti eksperimenti u otvorenoj ili u zatvorenoj sprezi. Polazeći od ove pretpostavke razvijen je čitav niz metoda za eksperimentalno podešavanje parametara PIDa. Interesantno je napomenuti da su prvu eksperimentalnu metodu predložili Ziegler i Nichols još davne 1942. godine. Od onda, tokom čitavih pedeset godina ona se na različite načine poboljšava i dopunjava, ali ni danas ne prestaje da zaokuplja pažnju istraživača. Naime, praksa je pokazala da vrednosti parametara koje se određuju primenom neke od eksperimentalnih metoda predstavljaju zapravo dobre početne vrednosti za dalje eksperimente na samom procesu. Drugim rečima, pokazuje se da se na procesu dodatnim "finim" doterivanjem parametara, po pravilu, može u izvesnoj meri popraviti performansa. Međutim, ukoliko se podešavanje performanse pokuša bez postavljanja početnih vrednosti određenih korišćenjem eksperimentalnih metoda, onda je
w (rad/sec)
Am
plitu
da (
abs)
10-1
100
101
102
103
104
0
0.5
1
1.5
Teorijski PID
Realni PID
t (sec)
Jedi
nicn
i ods
kocn
i odz
iv
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
1.2
1.4
Realni PID
Teorijski PID
w (rad/sec)100
101
102
103
104
105
12
34
56
789
10
Am
plitu
da (
abs)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2
1.4
t(sec)
jedi
nicn
i ods
kocn
i odz
ivTeorijski PID
Realni PID

PID/82
gotovo nemoguće doći do odgovarajućeg rezultata. Potrebno je da se istakne da su Ziegler i Nichols do tablica parametara PIDa došli
posle niza eksperimenata u kojima su menjali parametre PIDa i posmatrali dobijene odzive. Pri tome su kao kriterijum valjanosti odziva koristili zahtev da drugi preskok u odzivu bude 25% od prvog preskoka. To zapravo znači da regulatori projektovani na ovaj način nužno dovode do prigušenog periodičnog odziva. Ukoliko se, međutim, želi neki drugačiji oblik odziva onda je neophodno da se parametri dodatno podešavaju.
Sve eksperimentalne metode razvijene su za kontinualne regulatore, s tim što se za diskretne sisteme uvode odgovarajuće korekcije eksperimentalno određenih vrednosti parametara. Ovo je prirodna posledica činjenice da su procesi kontinualni, te da se eksperimenti izvode u tom okruženju.
Osnovna podela eksperimentalnih metoda zasniva se na tome da li su one zasnovane na snimanju odskočnog odziva samog procesa ili na određivanju učestanosti i pojačanja pri kome se sistem sa jediničnom povratnom spregom nalazi na oscilatornoj granici stabilnosti.
5.2.1. SNIMANJE ODSKOČNOG ODZIVA Ovo je originalna Zigler-Nicholsova ideja koja se zasniva na pretpostavci da će svi
procesi kojima se upravlja imati jedan od dva oblika odskočnog odziva, a u zavisnosti od toga da li imaju ili nemaju astatizam. Pretpostavlja se, naime da se radi o procesima čije se funkcije prenosa mogu aproksimirati kao
s sp1 pa
p
K KG (s) e ili G (s) e
1 T s s−τ −τ= =
+ (5.8)
Za te dve funkcije prenosa parametri PIDa se određuju prema tablici (T. 5-1).
Primena ove metode zahteva da se izvrši eksperimentalno snimanje odskočnog odziva procesa u otvorenoj sprezi. Ukoliko taj odziv
odgovara jednom od dva očekivana oblika (Sl. 5-16), onda se povlači tangenta u tački najstrmijeg dela krive i direktno se očitavaju vrednosti parametara funkcije prenosa. Na osnovu njih se, uz pomoć tablice, određuju parametri PIDa.
SL. 5-16 ODSKOČNI ODZIV PROCESA BEZ ASTATIZMA I SA ASTATIZMOM
PR. 5-2
Radi ilustracije primene ove metode posmatra se proces čija je funkcija prenosa 1000
1 5 10 20pG (s)(s )(s )(s )(s )
=+ + + +
(5.9)
Iz snimljenog odskočnog odziva određuju se sledeći parametri
τ==α a
TK
tgp
τ= Ka
Kp Ti Td
P Tp/(Kτ)
PI 0.9 Tp /(Kτ) 3τ
PID 1.2 Tp /(Kτ) 2τ τ/2
T. 5-1 ZIEGLER NICHOLS-OVA TABLICA – ODSKOČNI ODZIV
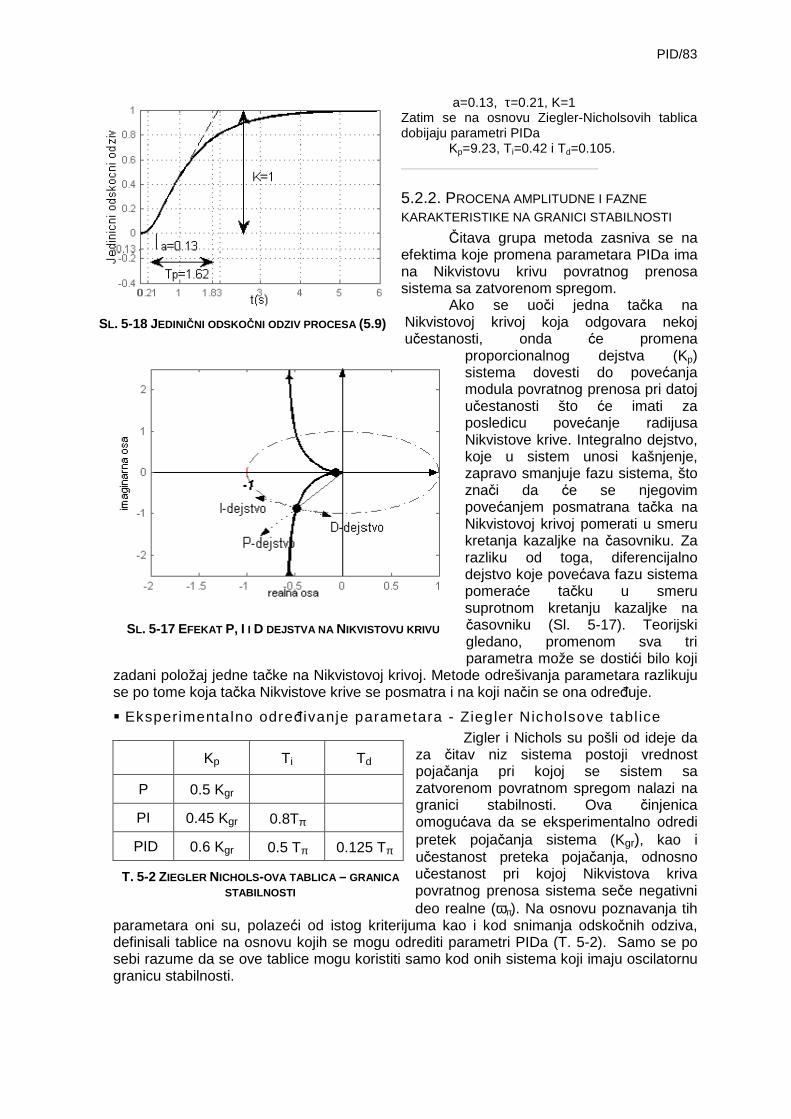
PID/83
a=0.13, τ=0.21, K=1 Zatim se na osnovu Ziegler-Nicholsovih tablica dobijaju parametri PIDa
Kp=9.23, Ti=0.42 i Td=0.105.
5.2.2. PROCENA AMPLITUDNE I FAZNE
KARAKTERISTIKE NA GRANICI STABILNOSTI Čitava grupa metoda zasniva se na
efektima koje promena parametara PIDa ima na Nikvistovu krivu povratnog prenosa sistema sa zatvorenom spregom.
Ako se uoči jedna tačka na Nikvistovoj krivoj koja odgovara nekoj učestanosti, onda će promena
proporcionalnog dejstva (Kp) sistema dovesti do povećanja modula povratnog prenosa pri datoj učestanosti što će imati za posledicu povećanje radijusa Nikvistove krive. Integralno dejstvo, koje u sistem unosi kašnjenje, zapravo smanjuje fazu sistema, što znači da će se njegovim povećanjem posmatrana tačka na Nikvistovoj krivoj pomerati u smeru kretanja kazaljke na časovniku. Za razliku od toga, diferencijalno dejstvo koje povećava fazu sistema pomeraće tačku u smeru suprotnom kretanju kazaljke na časovniku (Sl. 5-17). Teorijski gledano, promenom sva tri parametra može se dostići bilo koji
zadani položaj jedne tačke na Nikvistovoj krivoj. Metode odrešivanja parametara razlikuju se po tome koja tačka Nikvistove krive se posmatra i na koji način se ona određuje.
Eksperimentalno određ ivanje parametara - Ziegler Nicholsove tabl ice Zigler i Nichols su pošli od ideje da
za čitav niz sistema postoji vrednost pojačanja pri kojoj se sistem sa zatvorenom povratnom spregom nalazi na granici stabilnosti. Ova činjenica omogućava da se eksperimentalno odredi pretek pojačanja sistema (Kgr), kao i učestanost preteka pojačanja, odnosno učestanost pri kojoj Nikvistova kriva povratnog prenosa sistema seče negativni deo realne (ωπ). Na osnovu poznavanja tih
parametara oni su, polazeći od istog kriterijuma kao i kod snimanja odskočnih odziva, definisali tablice na osnovu kojih se mogu odrediti parametri PIDa (T. 5-2). Samo se po sebi razume da se ove tablice mogu koristiti samo kod onih sistema koji imaju oscilatornu granicu stabilnosti.
SL. 5-17 EFEKAT P, I I D DEJSTVA NA NIKVISTOVU KRIVU
Kp Ti Td
P 0.5 Kgr
PI 0.45 Kgr 0.8Tπ
PID 0.6 Kgr 0.5 Tπ 0.125 Tπ
SL. 5-18 JEDINIČNI ODSKOČNI ODZIV PROCESA (5.9)
T. 5-2 ZIEGLER NICHOLS-OVA TABLICA – GRANICA STABILNOSTI
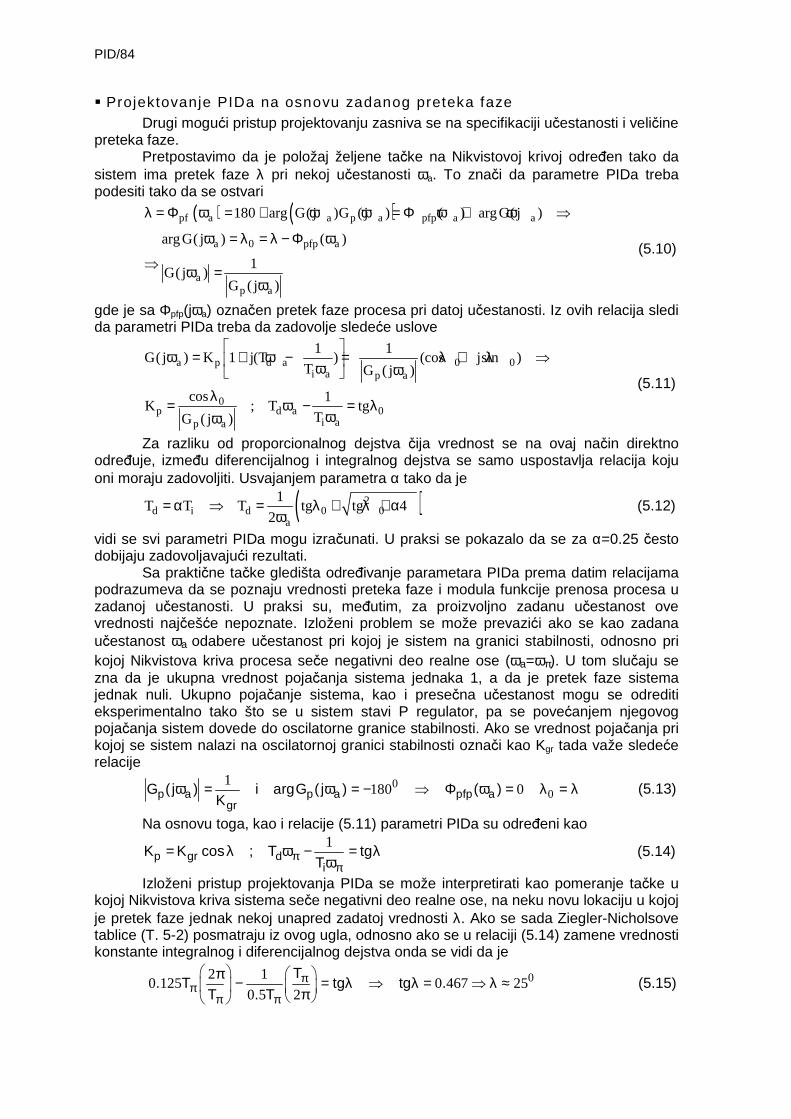
PID/84
Projektovanje PIDa na osnovu zadanog preteka faze Drugi mogući pristup projektovanju zasniva se na specifikaciji učestanosti i veličine
preteka faze. Pretpostavimo da je položaj željene tačke na Nikvistovoj krivoj određen tako da
sistem ima pretek faze λ pri nekoj učestanosti ωa. To znači da parametre PIDa treba podesiti tako da se ostvari
( ) ( )pf a a p a pfp a a
a 0 pfp a
ap a
180 arg G( j )G ( j ) ( ) argG( j )
argG( j ) ( )
1G( j )
G ( j )
λ = Φ ω = + ω ω = Φ ω + ω ⇒
ω = λ = λ − Φ ω
⇒ ω =ω
(5.10)
gde je sa Φpfp(jωa) označen pretek faze procesa pri datoj učestanosti. Iz ovih relacija sledi da parametri PIDa treba da zadovolje sledeće uslove
a p d a 0 0i a p a
0p d a 0
i ap a
1 1G( j ) K 1 j(T ) (cos jsin )
T G ( j )
cos 1K ; T tg
TG ( j )
ω = + ω − = λ + λ ⇒ ω ω
λ= ω − = λ
ωω
(5.11)
Za razliku od proporcionalnog dejstva čija vrednost se na ovaj način direktno određuje, između diferencijalnog i integralnog dejstva se samo uspostavlja relacija koju oni moraju zadovoljiti. Usvajanjem parametra α tako da je
( )2d i d 0 0
a
1T T T tg tg 4
2= α ⇒ = λ + λ + α
ω (5.12)
vidi se svi parametri PIDa mogu izračunati. U praksi se pokazalo da se za α=0.25 često dobijaju zadovoljavajući rezultati.
Sa praktične tačke gledišta određivanje parametara PIDa prema datim relacijama podrazumeva da se poznaju vrednosti preteka faze i modula funkcije prenosa procesa u zadanoj učestanosti. U praksi su, međutim, za proizvoljno zadanu učestanost ove vrednosti najčešće nepoznate. Izloženi problem se može prevazići ako se kao zadana učestanost ωa odabere učestanost pri kojoj je sistem na granici stabilnosti, odnosno pri kojoj Nikvistova kriva procesa seče negativni deo realne ose (ωa=ωπ). U tom slučaju se zna da je ukupna vrednost pojačanja sistema jednaka 1, a da je pretek faze sistema jednak nuli. Ukupno pojačanje sistema, kao i presečna učestanost mogu se odrediti eksperimentalno tako što se u sistem stavi P regulator, pa se povećanjem njegovog pojačanja sistem dovede do oscilatorne granice stabilnosti. Ako se vrednost pojačanja pri kojoj se sistem nalazi na oscilatornoj granici stabilnosti označi kao Kgr tada važe sledeće relacije
00
1180 0p a p a pfp a
grG (j ) i argG ( j ) ( )
Kω = ω = − ⇒ Φ ω = λ = λ (5.13)
Na osnovu toga, kao i relacije (5.11) parametri PIDa su određeni kao 1
p gr di
K K cos ; T tgTπ
π= λ ω − = λ
ω (5.14)
Izloženi pristup projektovanja PIDa se može interpretirati kao pomeranje tačke u kojoj Nikvistova kriva sistema seče negativni deo realne ose, na neku novu lokaciju u kojoj je pretek faze jednak nekoj unapred zadatoj vrednosti λ. Ako se sada Ziegler-Nicholsove tablice (T. 5-2) posmatraju iz ovog ugla, odnosno ako se u relaciji (5.14) zamene vrednosti konstante integralnog i diferencijalnog dejstva onda se vidi da je
02 10 125 0 467 25
0 5 2
T. T tg tg .
T . Tπ
ππ π
π − = λ ⇒ λ = ⇒ λ ≈ π (5.15)
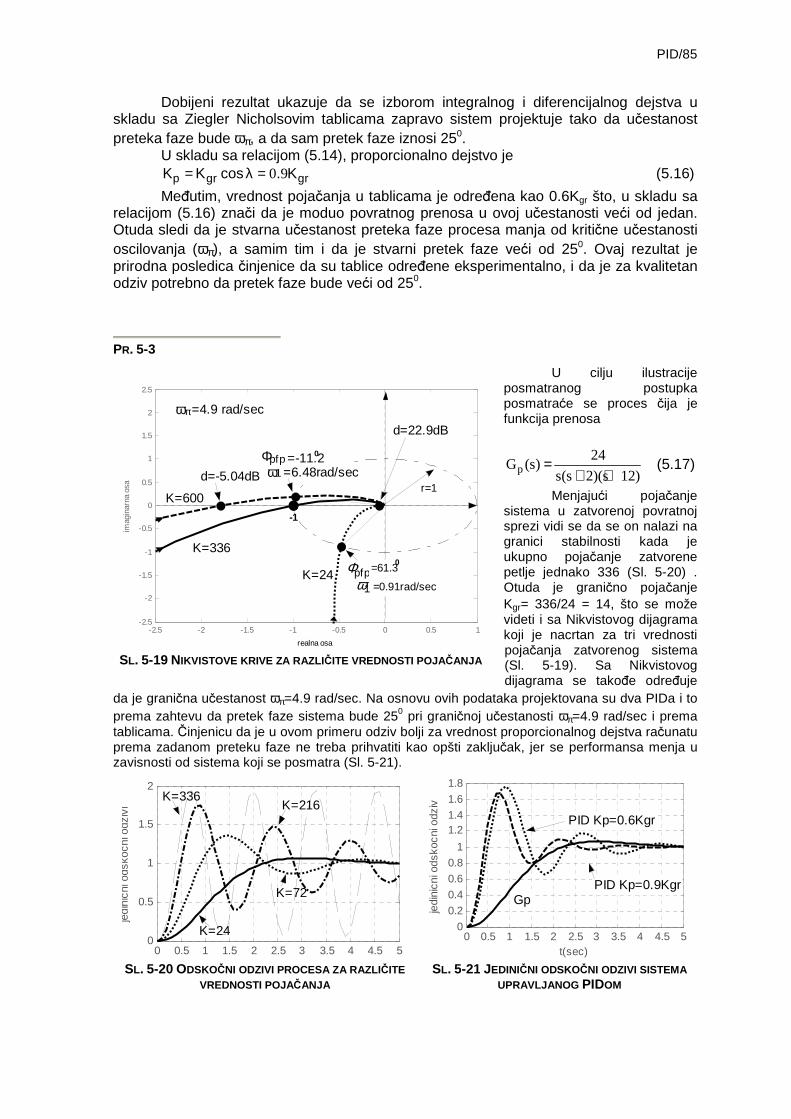
PID/85
Dobijeni rezultat ukazuje da se izborom integralnog i diferencijalnog dejstva u skladu sa Ziegler Nicholsovim tablicama zapravo sistem projektuje tako da učestanost preteka faze bude ωπ, a da sam pretek faze iznosi 250.
U skladu sa relacijom (5.14), proporcionalno dejstvo je 0 9p gr grK K cos . K= λ = (5.16)
Međutim, vrednost pojačanja u tablicama je određena kao 0.6Kgr što, u skladu sa relacijom (5.16) znači da je moduo povratnog prenosa u ovoj učestanosti veći od jedan. Otuda sledi da je stvarna učestanost preteka faze procesa manja od kritične učestanosti oscilovanja (ωπ), a samim tim i da je stvarni pretek faze veći od 250. Ovaj rezultat je prirodna posledica činjenice da su tablice određene eksperimentalno, i da je za kvalitetan odziv potrebno da pretek faze bude veći od 250.
PR. 5-3
U cilju ilustracije posmatranog postupka posmatraće se proces čija je funkcija prenosa
p24
G (s)s(s 2)(s 12)
=+ +
(5.17)
Menjajući pojačanje sistema u zatvorenoj povratnoj sprezi vidi se da se on nalazi na granici stabilnosti kada je ukupno pojačanje zatvorene petlje jednako 336 (Sl. 5-20) . Otuda je granično pojačanje Kgr= 336/24 = 14, što se može videti i sa Nikvistovog dijagrama koji je nacrtan za tri vrednosti pojačanja zatvorenog sistema (Sl. 5-19). Sa Nikvistovog dijagrama se takođe određuje
da je granična učestanost ωπ=4.9 rad/sec. Na osnovu ovih podataka projektovana su dva PIDa i to prema zahtevu da pretek faze sistema bude 250 pri graničnoj učestanosti ωπ=4.9 rad/sec i prema tablicama. Činjenicu da je u ovom primeru odziv bolji za vrednost proporcionalnog dejstva računatu prema zadanom preteku faze ne treba prihvatiti kao opšti zaključak, jer se performansa menja u zavisnosti od sistema koji se posmatra (Sl. 5-21).
SL. 5-20 ODSKOČNI ODZIVI PROCESA ZA RAZLI ČITE
VREDNOSTI POJAČANJA SL. 5-21 JEDINIČNI ODSKOČNI ODZIVI SISTEMA
UPRAVLJANOG PIDOM
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
t(sec)
jedi
nicn
i ods
kocn
i odz
ivi
K=336
K=24
K=72
K=216
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.21.4
1.6
1.8
t(sec)
jedi
nicn
i ods
kocn
i odz
iv
Gp
PID Kp=0.6Kgr
PID Kp=0.9Kgr
SL. 5-19 NIKVISTOVE KRIVE ZA RAZLI ČITE VREDNOSTI POJAČANJA
-2.5 -2 -1.5 -1 -0.5 0 0.5 1-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
realna osa
imag
inar
na o
sa r=1
K=24
K=600
K=336
=4.9 rad/secωπ
Φpfp=61.3
ω1 =0.91rad/sec
d=22.9dB
Φpfp =-11.2ω1 =6.48rad/secd=-5.04dB
0
0
-1
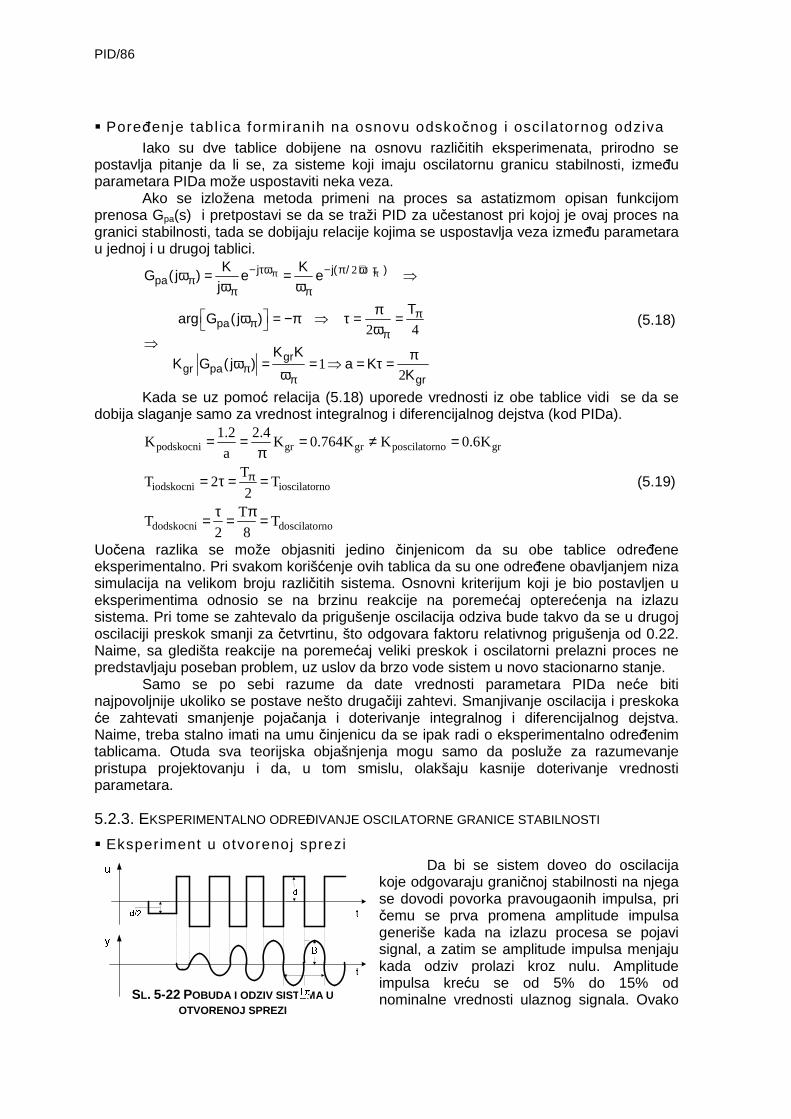
PID/86
Poređenje tabl ica formiranih na osnovu odskočnog i oscilatornog odziva Iako su dve tablice dobijene na osnovu različitih eksperimenata, prirodno se
postavlja pitanje da li se, za sisteme koji imaju oscilatornu granicu stabilnosti, između parametara PIDa može uspostaviti neka veza.
Ako se izložena metoda primeni na proces sa astatizmom opisan funkcijom prenosa Gpa(s) i pretpostavi se da se traži PID za učestanost pri kojoj je ovaj proces na granici stabilnosti, tada se dobijaju relacije kojima se uspostavlja veza između parametara u jednoj i u drugoj tablici.
2
2 4
12
j j( / )pa
pa
grgr pa
gr
K KG (j ) e e
j
Targ G (j )
K KK G (j ) a K
K
π π− τω − π +ω τπ
π π
ππ
π
ππ
ω = = ⇒ω ω
π ω = −π ⇒ τ = = ω
⇒πω = = ⇒ = τ =
ω
(5.18)
Kada se uz pomoć relacija (5.18) uporede vrednosti iz obe tablice vidi se da se dobija slaganje samo za vrednost integralnog i diferencijalnog dejstva (kod PIDa).
podskocni gr gr poscilatorno gr
iodskocni ioscilatorno
dodskocni doscilatorno
1.2 2.4K K 0.764K K 0.6K
aT
T 2 T2
TT T
2 8
π
= = = ≠ =π
= τ = =
τ π= = =
(5.19)
Uočena razlika se može objasniti jedino činjenicom da su obe tablice određene eksperimentalno. Pri svakom korišćenje ovih tablica da su one određene obavljanjem niza simulacija na velikom broju različitih sistema. Osnovni kriterijum koji je bio postavljen u eksperimentima odnosio se na brzinu reakcije na poremećaj opterećenja na izlazu sistema. Pri tome se zahtevalo da prigušenje oscilacija odziva bude takvo da se u drugoj oscilaciji preskok smanji za četvrtinu, što odgovara faktoru relativnog prigušenja od 0.22. Naime, sa gledišta reakcije na poremećaj veliki preskok i oscilatorni prelazni proces ne predstavljaju poseban problem, uz uslov da brzo vode sistem u novo stacionarno stanje.
Samo se po sebi razume da date vrednosti parametara PIDa neće biti najpovoljnije ukoliko se postave nešto drugačiji zahtevi. Smanjivanje oscilacija i preskoka će zahtevati smanjenje pojačanja i doterivanje integralnog i diferencijalnog dejstva. Naime, treba stalno imati na umu činjenicu da se ipak radi o eksperimentalno određenim tablicama. Otuda sva teorijska objašnjenja mogu samo da posluže za razumevanje pristupa projektovanju i da, u tom smislu, olakšaju kasnije doterivanje vrednosti parametara.
5.2.3. EKSPERIMENTALNO ODREĐIVANJE OSCILATORNE GRANICE STABILNOSTI
Eksperiment u otvorenoj sprezi Da bi se sistem doveo do oscilacija
koje odgovaraju graničnoj stabilnosti na njega se dovodi povorka pravougaonih impulsa, pri čemu se prva promena amplitude impulsa generiše kada na izlazu procesa se pojavi signal, a zatim se amplitude impulsa menjaju kada odziv prolazi kroz nulu. Amplitude impulsa kreću se od 5% do 15% od nominalne vrednosti ulaznog signala. Ovako SL. 5-22 POBUDA I ODZIV SISTEMA U
OTVORENOJ SPREZI
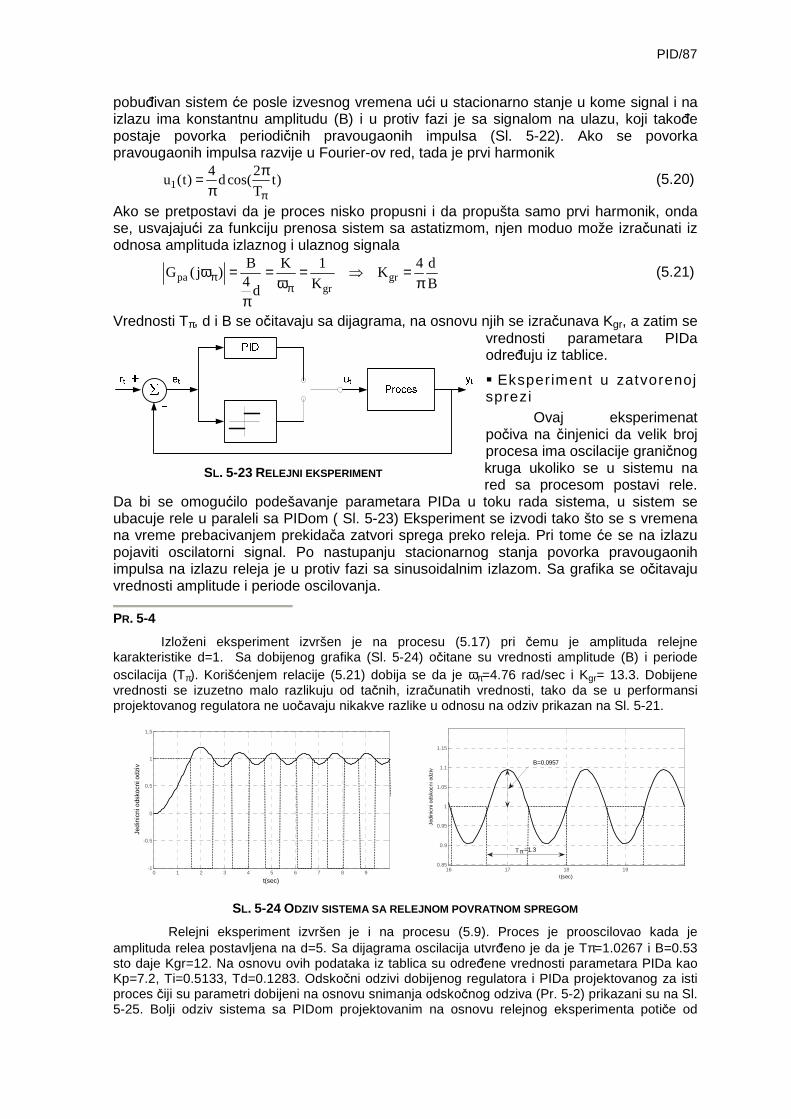
PID/87
pobuđivan sistem će posle izvesnog vremena ući u stacionarno stanje u kome signal i na izlazu ima konstantnu amplitudu (B) i u protiv fazi je sa signalom na ulazu, koji takođe postaje povorka periodičnih pravougaonih impulsa (Sl. 5-22). Ako se povorka pravougaonih impulsa razvije u Fourier-ov red, tada je prvi harmonik
14 2
u (t) dcos( t)Tπ
π=π
(5.20)
Ako se pretpostavi da je proces nisko propusni i da propušta samo prvi harmonik, onda se, usvajajući za funkciju prenosa sistem sa astatizmom, njen moduo može izračunati iz odnosa amplituda izlaznog i ulaznog signala
pa grgr
B K 1 4 dG ( j ) K
4 K Bdπ
πω = = = ⇒ =
ω ππ
(5.21)
Vrednosti Tπ, d i B se očitavaju sa dijagrama, na osnovu njih se izračunava Kgr, a zatim se vrednosti parametara PIDa određuju iz tablice.
Eksperiment u zatvorenoj sprezi
Ovaj eksperimenat počiva na činjenici da velik broj procesa ima oscilacije graničnog kruga ukoliko se u sistemu na red sa procesom postavi rele.
Da bi se omogućilo podešavanje parametara PIDa u toku rada sistema, u sistem se ubacuje rele u paraleli sa PIDom ( Sl. 5-23) Eksperiment se izvodi tako što se s vremena na vreme prebacivanjem prekidača zatvori sprega preko releja. Pri tome će se na izlazu pojaviti oscilatorni signal. Po nastupanju stacionarnog stanja povorka pravougaonih impulsa na izlazu releja je u protiv fazi sa sinusoidalnim izlazom. Sa grafika se očitavaju vrednosti amplitude i periode oscilovanja.
PR. 5-4
Izloženi eksperiment izvršen je na procesu (5.17) pri čemu je amplituda relejne karakteristike d=1. Sa dobijenog grafika (Sl. 5-24) očitane su vrednosti amplitude (B) i periode oscilacija (Tπ). Korišćenjem relacije (5.21) dobija se da je ωπ=4.76 rad/sec i Kgr= 13.3. Dobijene vrednosti se izuzetno malo razlikuju od tačnih, izračunatih vrednosti, tako da se u performansi projektovanog regulatora ne uočavaju nikakve razlike u odnosu na odziv prikazan na Sl. 5-21.
SL. 5-24 ODZIV SISTEMA SA RELEJNOM POVRATNOM SPREGOM
Relejni eksperiment izvršen je i na procesu (5.9). Proces je prooscilovao kada je amplituda relea postavljena na d=5. Sa dijagrama oscilacija utvrđeno je da je Tπ=1.0267 i B=0.53 sto daje Kgr=12. Na osnovu ovih podataka iz tablica su određene vrednosti parametara PIDa kao Kp=7.2, Ti=0.5133, Td=0.1283. Odskočni odzivi dobijenog regulatora i PIDa projektovanog za isti proces čiji su parametri dobijeni na osnovu snimanja odskočnog odziva (Pr. 5-2) prikazani su na Sl. 5-25. Bolji odziv sistema sa PIDom projektovanim na osnovu relejnog eksperimenta potiče od
0 1 2 3 4 5 6 7 8 9-1
-0.5
0
0.5
1
1.5
t(sec)
Jedi
nicn
i ods
kocn
i odz
iv
16 17 18 190.85
0.9
0.95
1
1.05
1.1
1.15
t(sec)
Jedi
nicn
i ods
kocn
i odz
iv
πT =1.3
B=0.0957
SL. 5-23 RELEJNI EKSPERIMENT
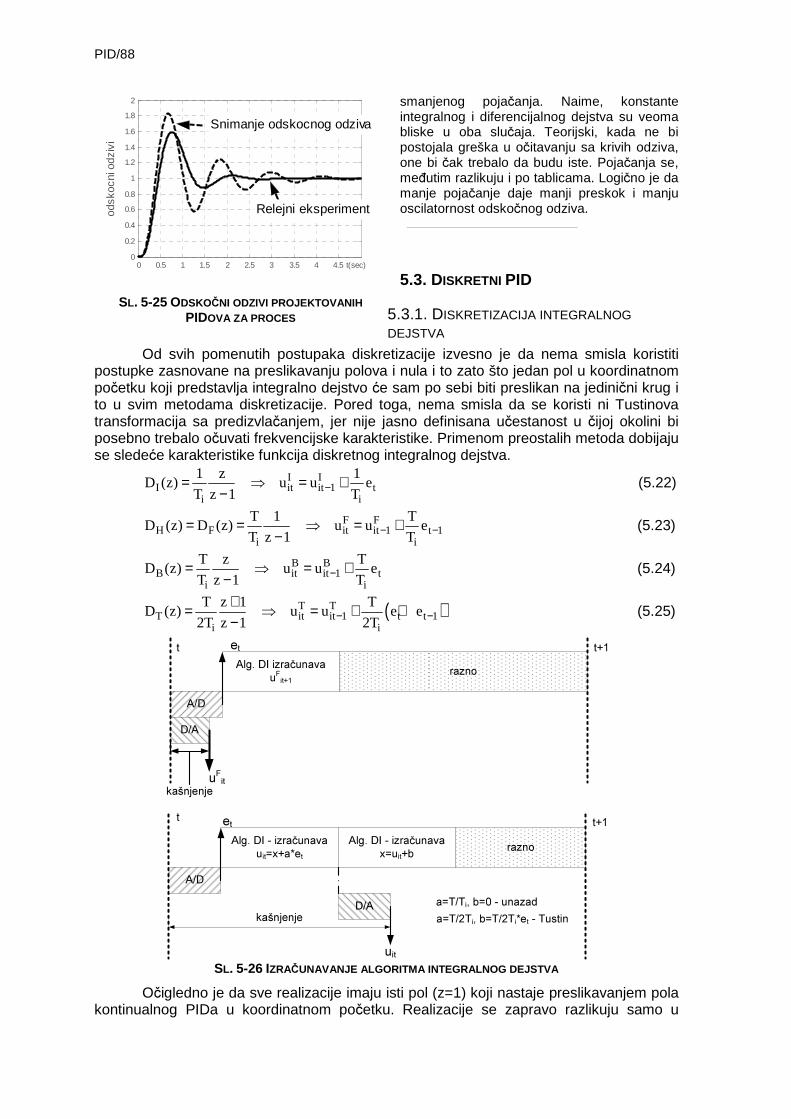
PID/88
smanjenog pojačanja. Naime, konstante integralnog i diferencijalnog dejstva su veoma bliske u oba slučaja. Teorijski, kada ne bi postojala greška u očitavanju sa krivih odziva, one bi čak trebalo da budu iste. Pojačanja se, međutim razlikuju i po tablicama. Logično je da manje pojačanje daje manji preskok i manju oscilatornost odskočnog odziva.
5.3. DISKRETNI PID
5.3.1. DISKRETIZACIJA INTEGRALNOG
DEJSTVA Od svih pomenutih postupaka diskretizacije izvesno je da nema smisla koristiti
postupke zasnovane na preslikavanju polova i nula i to zato što jedan pol u koordinatnom početku koji predstavlja integralno dejstvo će sam po sebi biti preslikan na jedinični krug i to u svim metodama diskretizacije. Pored toga, nema smisla da se koristi ni Tustinova transformacija sa predizvlačanjem, jer nije jasno definisana učestanost u čijoj okolini bi posebno trebalo očuvati frekvencijske karakteristike. Primenom preostalih metoda dobijaju se sledeće karakteristike funkcija diskretnog integralnog dejstva.
I II it it 1 t
i i
1 z 1D (z) u u e
T z 1 T−= ⇒ = +−
(5.22)
F FH F it it 1 t 1
i i
T 1 TD (z) D (z) u u e
T z 1 T− −= = ⇒ = +−
(5.23)
B BB it it 1 t
i i
T z TD (z) u u e
T z 1 T−= ⇒ = +−
(5.24)
( )T TT it it 1 t t 1
i i
T z 1 TD (z) u u e e
2T z 1 2T− −+= ⇒ = + +−
(5.25)
SL. 5-26 IZRAČUNAVANJE ALGORITMA INTEGRALNOG DEJSTVA
Očigledno je da sve realizacije imaju isti pol (z=1) koji nastaje preslikavanjem pola kontinualnog PIDa u koordinatnom početku. Realizacije se zapravo razlikuju samo u
Alg. DI izračunava
uF
it+1
A/D
D/A
uF
it
et
razno
t t+1
Alg. DI - izračunava
uit=x+a*et
A/D
D/A
uit
et
razno
tt+1
Alg. DI - izračunava
x=uit+b
kašnjenje
kašnjenje
a=T/Ti, b=0 - unazad
a=T/2Ti, b=T/2Ti*et - Tustin
SL. 5-25 ODSKOČNI ODZIVI PROJEKTOVANIH PIDOVA ZA PROCES
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t(sec)
odsk
ocni
odz
ivi
relejni eksperimentRelejni eksperiment
Snimanje odskocnog odziva

PID/89
položaju i broju nula, što utiče na način njihove realizacije. Izvesno je da metod impulsne invarijantnosti ne zadržava čak ni nagib vremenskog odziva, što ga eliminiše sa tačke gledišta praktične primene. Preostale tri metode diskretizacije mogu da se koriste.
U pogledu vremena potrebnog za izračunavanje najpogodnija je metoda diferenciranja unapred jer ona ne koristi odbirak greške u trenutku izračunavanja upravljanja. To praktično znači da se upravljanje može izračunati bez ikakvog kašnjenja. U odnosu na kašnjenje metoda diferenciranja unazad i Tustinova transformacija su nešto
nepovoljnije jer se mora sačekati da se završi odabiranje signala greške, a zatim se uz jedno množenje i jedno sabiranje dobija vrednost upravljanja (Sl. 5-26). Samo se po sebi razume, da će činjenica da diferenciranje unapred unosi zapravo u sistem kašnjenje od jedne periode imati odgovarajuće posledice na performansu sistema.
Frekvencijske karakteristike (Sl. 5-27) pokazuju, prema očekivanju, najbolje slaganje kod Tustinove transformacije
( )j2
ii
1G j e
T
π−ω =
ω (5.26)
( )T
j( )2 2
Bi
T 1D j e
T2T sin2
π ω− −ω = ω (5.27)
( )T
j( )2 2
Fi
T 1D j e
T2T sin2
π ω− +ω = ω (5.28)
( )j2
Ti
T TD j ctg( )e
2T 2
π−ωω = (5.29)
5.3.2. DISKRETIZACIJA DIFERENCIJALNOG DEJSTVA Diskretni kontroler koji ostvaruje diferencijalno dejstvo se ne može dobiti primenom
metode impulsne invarijantnosti, jer odgovarajuća z-transformacija nije definisana. Preostale četiri metode diskretizacije daju sledeće rezultate.
( )HH d dt d t t 1D (z) T (z 1) u T e e−= − ⇒ = − (5.30)
( )Bd dB dt t t 1
T Tz 1D (z) u e e
T z T −−= ⇒ = − (5.31)
( ) ( )Fd dF dt 1 t t 1
T TD (z) z 1 u e e
T T− −= − ⇒ = − (5.32)
( )Td dT dt t t 1 dt 1
T Tz 1D (z) 2 u 2 e e u
T z 1 T − −−= ⇒ = − −+
(5.33)
Izvesno je da se ni invarijantnost u odnosu na odskočni signal ne može koristiti za diskretizaciju kontrolera, jer ona ne čuva čak ni nagib odziva. Od preostale tri mogućnosti, diferenciranje unapred unosi kašnjenje od cele periode odabiranja, što takođe nije poželjno u realizaciji. Sa gledišta kašnjenja i diferenciranje unazad i Tustinova transformacija, zahtevaju vrednost ulaza u trenutku odabiranja, što znači da će se komponenta upravljanja izračunavati sa odgovarajućim kašnjenjem koje uključuje vreme potrebno za A/D konverziju.
SL. 5-27 FREKVENCIJSKE KARAKTERISTIKE INTEGRALNOG DEJSTVA
-20
-10
0
10
20
10-1
100
101
-180
-135
-45
0
Gi
Gi
Db Df
Db
Df
Dt
Dt
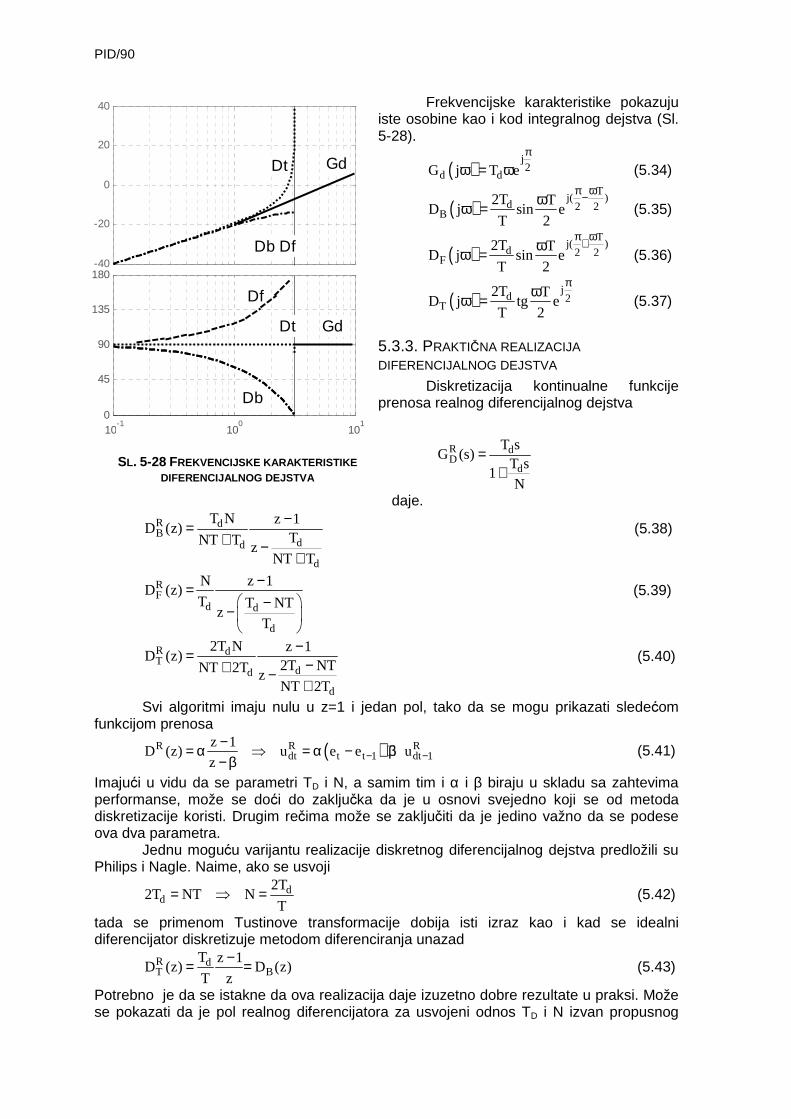
PID/90
Frekvencijske karakteristike pokazuju iste osobine kao i kod integralnog dejstva (Sl. 5-28).
( )j2
d dG j T eπ
ω = ω (5.34)
( )T
j( )d 2 2
B2T T
D j sin eT 2
π ω−ωω = (5.35)
( )T
j( )d 2 2
F2T T
D j sin eT 2
π ω+ωω = (5.36)
( )j
d 2T
2T TD j tg e
T 2
πωω = (5.37)
5.3.3. PRAKTIČNA REALIZACIJA
DIFERENCIJALNOG DEJSTVA Diskretizacija kontinualne funkcije
prenosa realnog diferencijalnog dejstva
R dD
d
T sG (s)
T s1
N
=+
daje. R dB
dd
d
T N z 1D (z)
TNT T zNT T
−=+ −
+
(5.38)
RF
d d
d
N z 1D (z)
T T NTz
T
−= −−
(5.39)
R dT
dd
d
2T N z 1D (z)
2T NTNT 2T zNT 2T
−= −+ −+
(5.40)
Svi algoritmi imaju nulu u z=1 i jedan pol, tako da se mogu prikazati sledećom funkcijom prenosa
( )R R Rdt t t 1 dt 1
z 1D (z) u e e u
z − −−= α ⇒ = α − + β− β
(5.41)
Imajući u vidu da se parametri TD i N, a samim tim i α i β biraju u skladu sa zahtevima performanse, može se doći do zaključka da je u osnovi svejedno koji se od metoda diskretizacije koristi. Drugim rečima može se zaključiti da je jedino važno da se podese ova dva parametra. Jednu moguću varijantu realizacije diskretnog diferencijalnog dejstva predložili su Philips i Nagle. Naime, ako se usvoji
dd
2T2T NT N
T= ⇒ = (5.42)
tada se primenom Tustinove transformacije dobija isti izraz kao i kad se idealni diferencijator diskretizuje metodom diferenciranja unazad
R dT B
T z 1D (z) D (z)
T z
−= = (5.43)
Potrebno je da se istakne da ova realizacija daje izuzetno dobre rezultate u praksi. Može se pokazati da je pol realnog diferencijatora za usvojeni odnos TD i N izvan propusnog
SL. 5-28 FREKVENCIJSKE KARAKTERISTIKE DIFERENCIJALNOG DEJSTVA
-40
-20
0
20
40
10-1
100
101
0
45
90
135
180
Gd
GdDt
Dt
Db Df
Db
Df
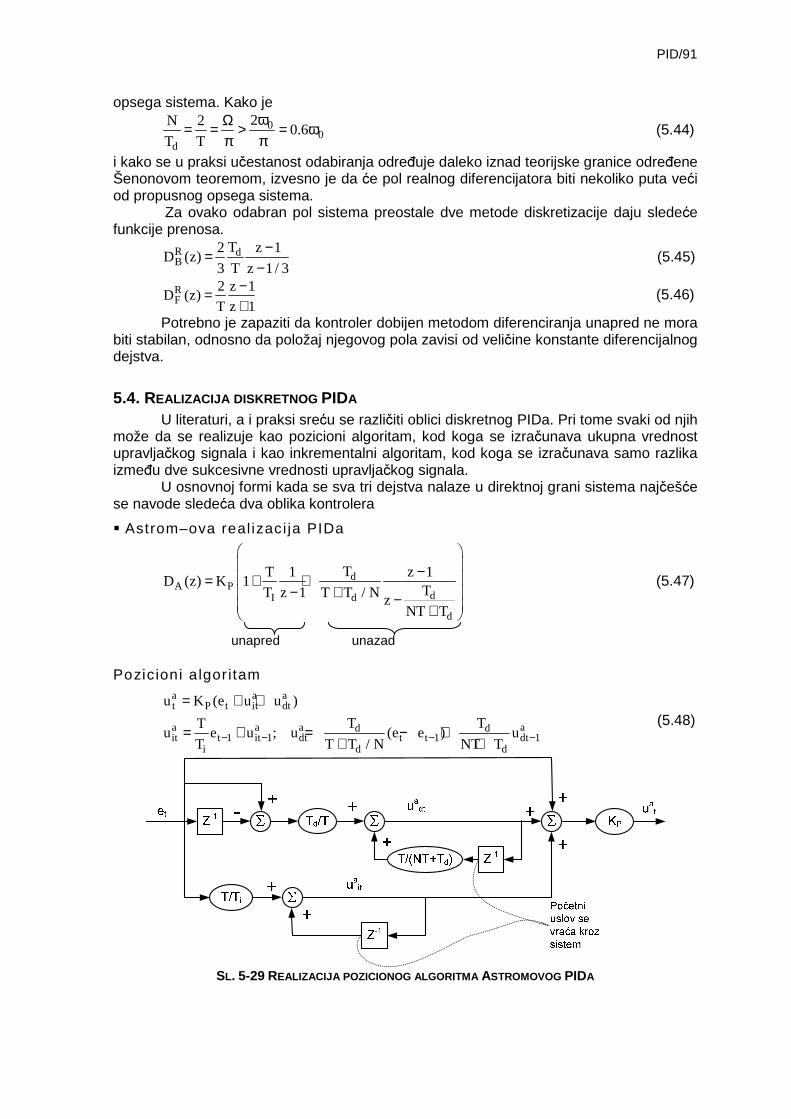
PID/91
opsega sistema. Kako je
00
d
2N 20.6
T T
ωΩ= = > = ωπ π
(5.44)
i kako se u praksi učestanost odabiranja određuje daleko iznad teorijske granice određene Šenonovom teoremom, izvesno je da će pol realnog diferencijatora biti nekoliko puta veći od propusnog opsega sistema.
Za ovako odabran pol sistema preostale dve metode diskretizacije daju sledeće funkcije prenosa.
R dB
T2 z 1D (z)
3 T z 1/ 3
−=−
(5.45)
RF
2 z 1D (z)
T z 1
−=+
(5.46)
Potrebno je zapaziti da kontroler dobijen metodom diferenciranja unapred ne mora biti stabilan, odnosno da položaj njegovog pola zavisi od veličine konstante diferencijalnog dejstva.
5.4. REALIZACIJA DISKRETNOG PIDA U literaturi, a i praksi sreću se različiti oblici diskretnog PIDa. Pri tome svaki od njih
može da se realizuje kao pozicioni algoritam, kod koga se izračunava ukupna vrednost upravljačkog signala i kao inkrementalni algoritam, kod koga se izračunava samo razlika između dve sukcesivne vrednosti upravljačkog signala.
U osnovnoj formi kada se sva tri dejstva nalaze u direktnoj grani sistema najčešće se navode sledeća dva oblika kontrolera
Astrom–ova real izaci ja PIDa
dA P
dI d
d
TT 1 z 1D (z) K 1
TT z 1 T T / N zNT T
− = + +
− + − +
(5.47)
Pozic ioni algor itam a a at P t it dt
a a a ad dit t 1 it 1 dt t t 1 dt 1
i d d
u K (e u u )
T TTu e u ; u (e e ) u
T T T / N NT T− − − −
= + +
= + = − ++ +
(5.48)
SL. 5-29 REALIZACIJA POZICIONOG ALGORITMA ASTROMOVOG PIDA
unapred unazad

PID/92
Blok dijagram realizacije pozicionog algoritma (Sl. 5-29) pokazuje da određena vrsta problema može biti izazvana nepoznavanjem početnih vrednosti integralnog i diferencijalnog dejstva. Iz strukture algoritma vidi se da obe ove početne vrednosti, zbog postojanja povratne sprege, direktno utiču na buduće vrednosti upravljačkih dejstva. To znači da će se eventualna greška u zadavanju ovih vrednosti propagirati kroz sistem. Naravno, pošto je sistem stabilan i efekat ovih grešaka biće izražen samo u prelaznom procesu. O ovom problemu biće kasnije više reči.
Inkrementalni algor itam Inkrementalni algoritam, kojim se izračunava razlika dve sukcesivne vrednosti
upravljanja (inkrement upravljanja) predstavlja jedan od načina da se izbegne problem nepoznavanja početnih uslova.
a a a at t t 1 P t t 1 t 1 dt
i
a ad ddt t t 1 t 2 dt 1
d d
Tu u u K (e e ) e u
T
T Tu (e 2e e ) u
T T / N NT T
− − −
− − −
∆ = − = − + + ∆
∆ = − + + ∆+ +
(5.49)
Potrebno je zapaziti da kod ove strukture kontrolera inkrementalni algoritam otklanja povratnu spregu kod integralnog dejstva, ali ona i nadalje postoji kod diferencijalnog dejstva.
Phi l ips-Nagle–ova real izacija PIDa
dPN P
I
TT z 1 z 1D (z) K 1
2T z 1 T z
+ −= + + − (5.50)
Budući da je ovaj kontroler dobijen Tustinovom transformacijom on ima isti oblik frekvencijskih karakteristika kao i kontinualni kontroler. Iz frekvencijskih karakteristika jasno se vide sva tri dejstva, pri čemu, naravno, dolazi do odgovarajućeg preslikavanja učestanosti.
j Tj T j Td
PN P j Ti
P di
aP d a
i aa
TT 1 eD (e ) K 1 (1 e )
2T T1 e
2 Tj tg1 1 T 2K 1 T
2 T 2 TT j tg 1 j tgT 2 T 2
j1 1 2 TK 1 T ; za tg
TT j T 21 j2
− ωω − ω
− ω
+= + + − = −
ω
= + + = ω ω +
ω ω= + + ω = ω + ω
(5.51)
Pozicioni algoritam
pn pn pnt P t it dt
pn pnt t 1it it 1
i
pn dt t 1dt
u K (e u u )
Tu (e e ) u
2T
Tu (e e )
T
− −
−
= + +
= + +
= −
(5.52)
Inkrementalni algoritam
pn pn pn dt t P t t 1 t t 1 t t 1 t 2t 1
i
TTu u u K (e e ) (e e ) (e 2e e )
2T T− − − −−
∆ = − = − + + + − +
(5.53)
Realizacija ovog pozicionog kontrolera (Sl. 5-30) pokazuje da je problem početnih uslova sveden samo na integralno dejstvo, dok su u inkrementalnoj strukturi (Sl. 5-31)
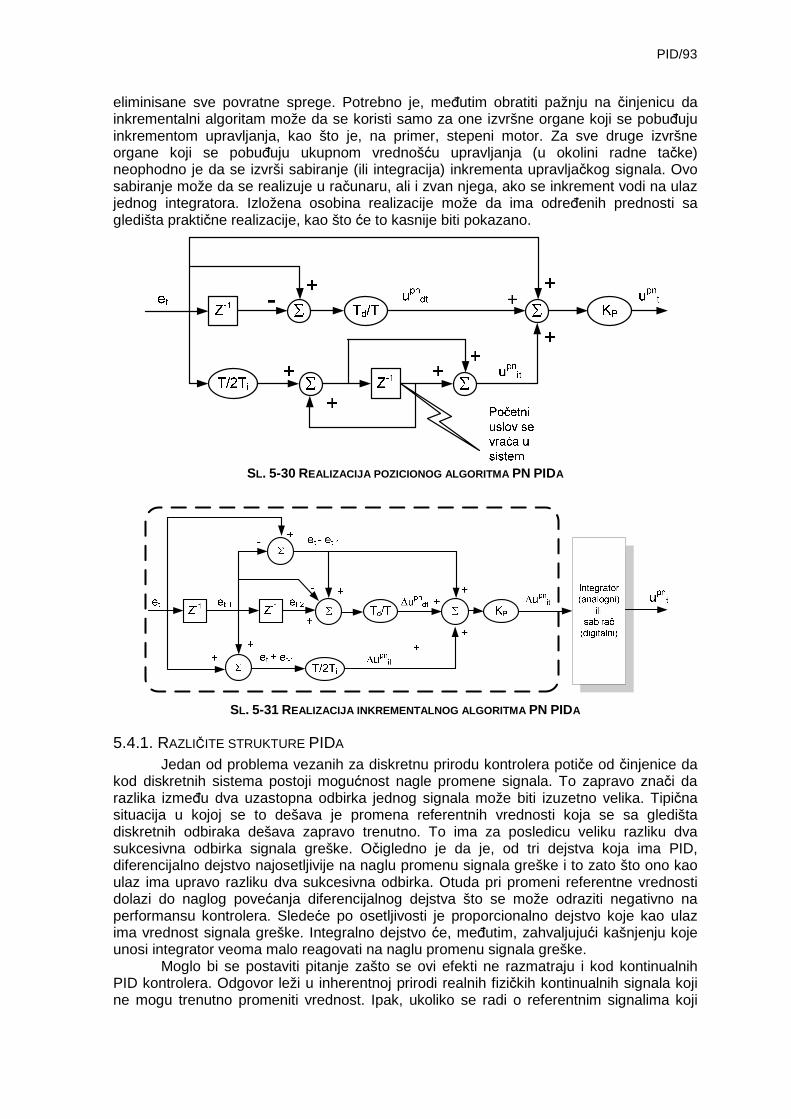
PID/93
eliminisane sve povratne sprege. Potrebno je, međutim obratiti pažnju na činjenicu da inkrementalni algoritam može da se koristi samo za one izvršne organe koji se pobuđuju inkrementom upravljanja, kao što je, na primer, stepeni motor. Za sve druge izvršne organe koji se pobuđuju ukupnom vrednošću upravljanja (u okolini radne tačke) neophodno je da se izvrši sabiranje (ili integracija) inkrementa upravljačkog signala. Ovo sabiranje može da se realizuje u računaru, ali i zvan njega, ako se inkrement vodi na ulaz jednog integratora. Izložena osobina realizacije može da ima određenih prednosti sa gledišta praktične realizacije, kao što će to kasnije biti pokazano.
SL. 5-30 REALIZACIJA POZICIONOG ALGORITMA PN PIDA
SL. 5-31 REALIZACIJA INKREMENTALNOG ALGORITMA PN PIDA
5.4.1. RAZLIČITE STRUKTURE PIDA Jedan od problema vezanih za diskretnu prirodu kontrolera potiče od činjenice da
kod diskretnih sistema postoji mogućnost nagle promene signala. To zapravo znači da razlika između dva uzastopna odbirka jednog signala može biti izuzetno velika. Tipična situacija u kojoj se to dešava je promena referentnih vrednosti koja se sa gledišta diskretnih odbiraka dešava zapravo trenutno. To ima za posledicu veliku razliku dva sukcesivna odbirka signala greške. Očigledno je da je, od tri dejstva koja ima PID, diferencijalno dejstvo najosetljivije na naglu promenu signala greške i to zato što ono kao ulaz ima upravo razliku dva sukcesivna odbirka. Otuda pri promeni referentne vrednosti dolazi do naglog povećanja diferencijalnog dejstva što se može odraziti negativno na performansu kontrolera. Sledeće po osetljivosti je proporcionalno dejstvo koje kao ulaz ima vrednost signala greške. Integralno dejstvo će, međutim, zahvaljujući kašnjenju koje unosi integrator veoma malo reagovati na naglu promenu signala greške.
Moglo bi se postaviti pitanje zašto se ovi efekti ne razmatraju i kod kontinualnih PID kontrolera. Odgovor leži u inherentnoj prirodi realnih fizičkih kontinualnih signala koji ne mogu trenutno promeniti vrednost. Ipak, ukoliko se radi o referentnim signalima koji
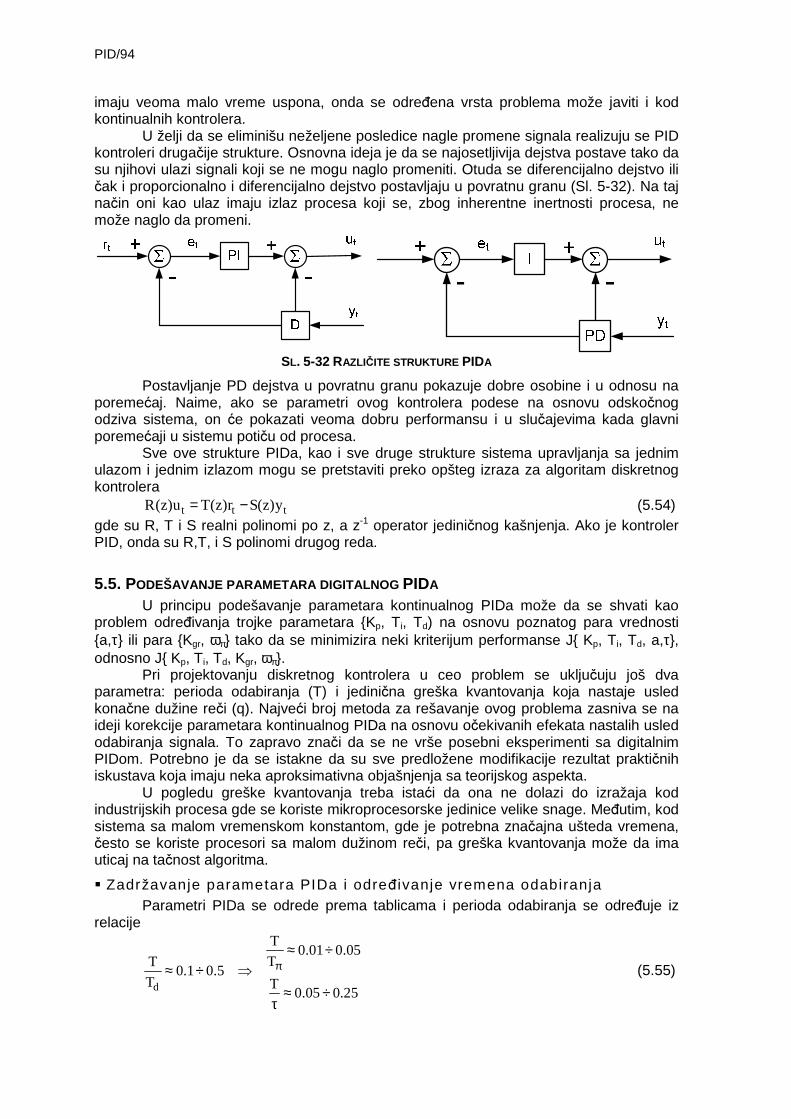
PID/94
imaju veoma malo vreme uspona, onda se određena vrsta problema može javiti i kod kontinualnih kontrolera.
U želji da se eliminišu neželjene posledice nagle promene signala realizuju se PID kontroleri drugačije strukture. Osnovna ideja je da se najosetljivija dejstva postave tako da su njihovi ulazi signali koji se ne mogu naglo promeniti. Otuda se diferencijalno dejstvo ili čak i proporcionalno i diferencijalno dejstvo postavljaju u povratnu granu (Sl. 5-32). Na taj način oni kao ulaz imaju izlaz procesa koji se, zbog inherentne inertnosti procesa, ne može naglo da promeni.
SL. 5-32 RAZLIČITE STRUKTURE PIDA
Postavljanje PD dejstva u povratnu granu pokazuje dobre osobine i u odnosu na poremećaj. Naime, ako se parametri ovog kontrolera podese na osnovu odskočnog odziva sistema, on će pokazati veoma dobru performansu i u slučajevima kada glavni poremećaji u sistemu potiču od procesa.
Sve ove strukture PIDa, kao i sve druge strukture sistema upravljanja sa jednim ulazom i jednim izlazom mogu se pretstaviti preko opšteg izraza za algoritam diskretnog kontrolera
t t tR(z)u T(z)r S(z)y= − (5.54) gde su R, T i S realni polinomi po z, a z-1 operator jediničnog kašnjenja. Ako je kontroler PID, onda su R,T, i S polinomi drugog reda.
5.5. PODEŠAVANJE PARAMETARA DIGITALNOG PIDA U principu podešavanje parametara kontinualnog PIDa može da se shvati kao
problem određivanja trojke parametara Kp, Ti, Td) na osnovu poznatog para vrednosti a,τ ili para Kgr, ωπ tako da se minimizira neki kriterijum performanse J Kp, Ti, Td, a,τ, odnosno J Kp, Ti, Td, Kgr, ωπ.
Pri projektovanju diskretnog kontrolera u ceo problem se uključuju još dva parametra: perioda odabiranja (T) i jedinična greška kvantovanja koja nastaje usled konačne dužine reči (q). Najveći broj metoda za rešavanje ovog problema zasniva se na ideji korekcije parametara kontinualnog PIDa na osnovu očekivanih efekata nastalih usled odabiranja signala. To zapravo znači da se ne vrše posebni eksperimenti sa digitalnim PIDom. Potrebno je da se istakne da su sve predložene modifikacije rezultat praktičnih iskustava koja imaju neka aproksimativna objašnjenja sa teorijskog aspekta.
U pogledu greške kvantovanja treba istaći da ona ne dolazi do izražaja kod industrijskih procesa gde se koriste mikroprocesorske jedinice velike snage. Međutim, kod sistema sa malom vremenskom konstantom, gde je potrebna značajna ušteda vremena, često se koriste procesori sa malom dužinom reči, pa greška kvantovanja može da ima uticaj na tačnost algoritma.
Zadržavanje parametara PIDa i određ ivanje vremena odabiranja Parametri PIDa se odrede prema tablicama i perioda odabiranja se određuje iz
relacije
d
T0.01 0.05
TT0.1 0.5
T T0.05 0.25
π≈ ÷
≈ ÷ ⇒
≈ ÷τ
(5.55)

PID/95
Korekcija parametara PIDa Ovaj pristup zasniva se na ideji da se efekti odabranog vremena odabiranja na
neki način ublaže odgovarajućom promenom parametara kontinualnog PIDa, odnosno odgovarajućih tablica uz eventualnu promenu i strukture. Postoji veliki broj predloženih modifikacija od kojih ćemo navesti samo neke.
GOFF
d i 2 dominantno kašnjenjeT T TT 0.3 0.3 , 5 10 ,
6 malo kašnjenje4 T Tπ
≈ τ = < < ≈
(5.56)
SMITH
U Ziegler-Nicholsovim tablicama se umesto kašnjenja τ koristi (τ+T/2) čime se zapravo uzima u obzir kašnjenje koje unosi D/A konvertor. Primećeno je da se kada je T/2≈τ performansa sistema pogoršava.
Kp Ti Td
P ( )pT
K 0.5Tτ +
PI ( )p0.9T
K 0.5Tτ + ( )3 0.5Tτ +
PID ( )p1.2T
K 0.5Tτ + ( )2 0.5Tτ + ( )0.5 0.5T)τ +
T. 5-3 SMITHOVE TABLICE PARAMETARA PIDA
TAKAHASHI U osnovi se koristi ista ideja o kašnjenju usled D/A konverzije ali se istovremeno
menja struktura PIDa kako bi se izbegli veliki signali kod nagle promene referentnog ulaza. PID se formira sa P i D dejstvom u povratnoj grani, što znači da je algoritam oblika
i i it p t d t t 1 t t i t t 1u K y K (y y ) u , u K e u− −= − − − + = + (5.57)
Pri projektovanju Takahashievog PIDa za određivanje koeficijenata se koriste dve vrste tablica (T. 5-4 i T. 5-5) u zavisnosti od toga kako su određeni parametri sistema kojim se upravlja.
Potrebno je primetiti da se Takahashijeve tablice približavaju Ziegler-Nicholsovim kada perioda odabiranja teži ka nuli.
Kp Ki Kd
P ( )pT
К Tτ +
PI ( )
pi
0.9T0.5K
К 0.5T−
τ +
p2
0.27T T
К( 0.5T)τ +
Neprimenljivo za 0T
τ →
PID ( )p
i1.2T
0.5KК T
−τ +
Neprimenljivo za 0T
τ →
p2
0.6T T
К( 0.5T)τ +
Neprimenljivo za 0T
τ →
p
p
0.6T0
КT T0.5T
1ili 2КT T
τ ≈
τ ≈
T. 5-4 TAKAHASHI - SISTEMI BEZ ASTATIZMA PARAMETRI ODRE ĐENI IZ ODSKOČNOG ODZIVA
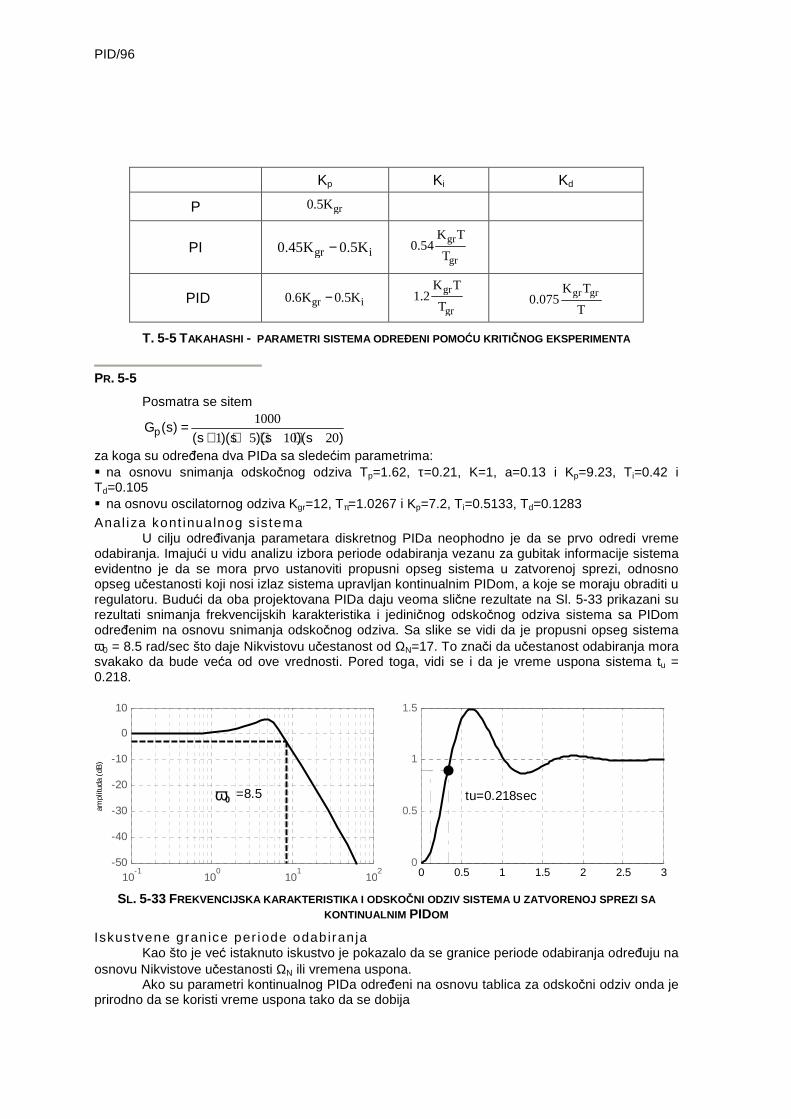
PID/96
Kp Ki Kd
P gr0.5K
PI gr i0.45K 0.5K− gr
gr
K T0.54
T
PID gr i0.6K 0.5K− gr
gr
K T1.2
T gr grK T
0.075T
T. 5-5 TAKAHASHI - PARAMETRI SISTEMA ODREĐENI POMOĆU KRITIČNOG EKSPERIMENTA
PR. 5-5
Posmatra se sitem 1000
1 5 10 20pG (s)(s )(s )(s )(s )
=+ + + +
za koga su određena dva PIDa sa sledećim parametrima: na osnovu snimanja odskočnog odziva Tp=1.62, τ=0.21, K=1, a=0.13 i Kp=9.23, Ti=0.42 i Td=0.105 na osnovu oscilatornog odziva Kgr=12, Tπ=1.0267 i Kp=7.2, Ti=0.5133, Td=0.1283 Anal iza kont inualnog s istema
U cilju određivanja parametara diskretnog PIDa neophodno je da se prvo odredi vreme odabiranja. Imajući u vidu analizu izbora periode odabiranja vezanu za gubitak informacije sistema evidentno je da se mora prvo ustanoviti propusni opseg sistema u zatvorenoj sprezi, odnosno opseg učestanosti koji nosi izlaz sistema upravljan kontinualnim PIDom, a koje se moraju obraditi u regulatoru. Budući da oba projektovana PIDa daju veoma slične rezultate na Sl. 5-33 prikazani su rezultati snimanja frekvencijskih karakteristika i jediničnog odskočnog odziva sistema sa PIDom određenim na osnovu snimanja odskočnog odziva. Sa slike se vidi da je propusni opseg sistema ω0 = 8.5 rad/sec što daje Nikvistovu učestanost od ΩN=17. To znači da učestanost odabiranja mora svakako da bude veća od ove vrednosti. Pored toga, vidi se i da je vreme uspona sistema tu = 0.218.
SL. 5-33 FREKVENCIJSKA KARAKTERISTIKA I ODSKO ČNI ODZIV SISTEMA U ZATVORENOJ SPREZI SA KONTINUALNIM PIDOM
Iskustvene granice per iode odabiranja Kao što je već istaknuto iskustvo je pokazalo da se granice periode odabiranja određuju na
osnovu Nikvistove učestanosti ΩN ili vremena uspona. Ako su parametri kontinualnog PIDa određeni na osnovu tablica za odskočni odziv onda je
prirodno da se koristi vreme uspona tako da se dobija
10-1
100
101
102
-50
-40
-30
-20
-10
0
10
ampl
ituda
(dB
)
=8.50ω
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
t(sec)
tu=0.218sec
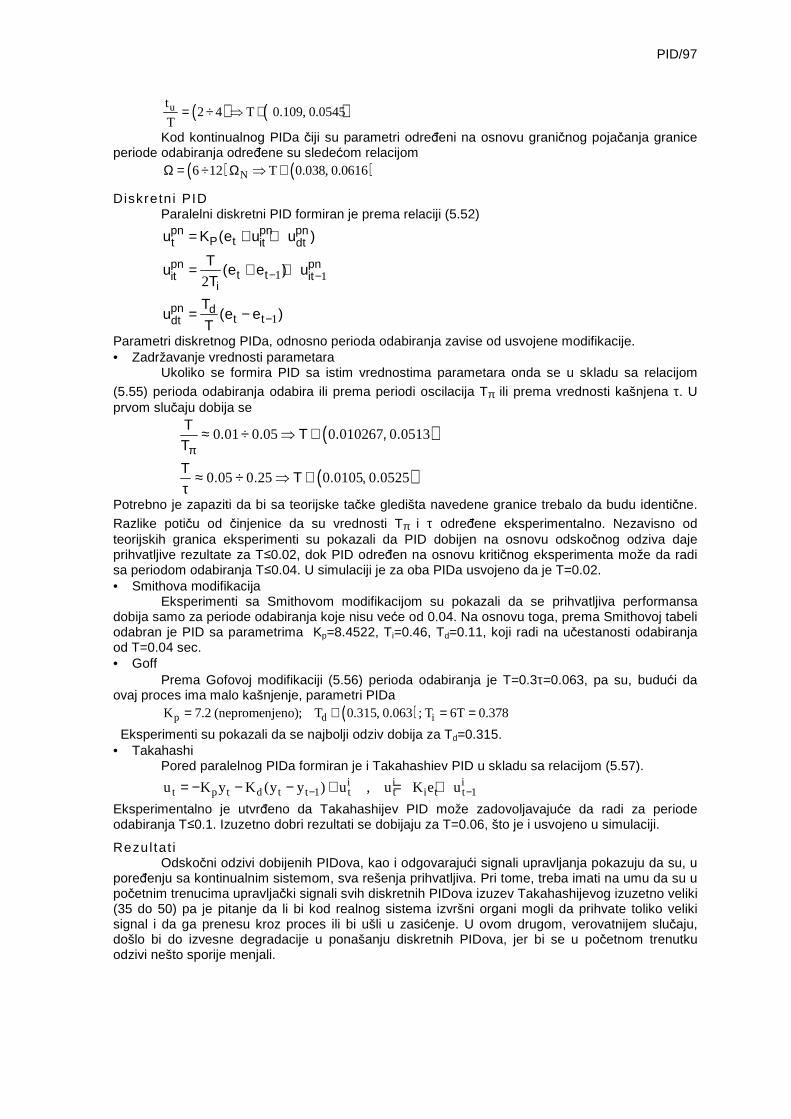
PID/97
( ) ( )ut 2 4 T 0.109, 0.0545T
= ÷ ⇒ ∈
Kod kontinualnog PIDa čiji su parametri određeni na osnovu graničnog pojačanja granice periode odabiranja određene su sledećom relacijom
( ) ( )N6 12 T 0.038, 0.0616Ω = ÷ Ω ⇒ ∈
Diskretn i PID Paralelni diskretni PID formiran je prema relaciji (5.52)
1 1
1
2
pn pn pnP tt it dt
pn pnt tit it
i
pn dt tdt
u K (e u u )
Tu (e e ) u
T
Tu (e e )
T
− −
−
= + +
= + +
= −
Parametri diskretnog PIDa, odnosno perioda odabiranja zavise od usvojene modifikacije. • Zadržavanje vrednosti parametara
Ukoliko se formira PID sa istim vrednostima parametara onda se u skladu sa relacijom (5.55) perioda odabiranja odabira ili prema periodi oscilacija Tπ ili prema vrednosti kašnjena τ. U prvom slučaju dobija se
( )
( )
0 01 0 05 0 010267 0 0513
0 05 0 25 0 0105 0 0525
π≈ ÷ ⇒ ∈
≈ ÷ ⇒ ∈τ
T. . T . , .
T
T. . T . , .
Potrebno je zapaziti da bi sa teorijske tačke gledišta navedene granice trebalo da budu identične. Razlike potiču od činjenice da su vrednosti Tπ i τ određene eksperimentalno. Nezavisno od teorijskih granica eksperimenti su pokazali da PID dobijen na osnovu odskočnog odziva daje prihvatljive rezultate za T≤0.02, dok PID određen na osnovu kritičnog eksperimenta može da radi sa periodom odabiranja T≤0.04. U simulaciji je za oba PIDa usvojeno da je T=0.02. • Smithova modifikacija
Eksperimenti sa Smithovom modifikacijom su pokazali da se prihvatljiva performansa dobija samo za periode odabiranja koje nisu veće od 0.04. Na osnovu toga, prema Smithovoj tabeli odabran je PID sa parametrima Kp=8.4522, Ti=0.46, Td=0.11, koji radi na učestanosti odabiranja od T=0.04 sec. • Goff
Prema Gofovoj modifikaciji (5.56) perioda odabiranja je T=0.3τ=0.063, pa su, budući da ovaj proces ima malo kašnjenje, parametri PIDa
( )p d iK 7.2 (nepromenjeno); T 0.315, 0.063 ; T 6T 0.378= ∈ = =
Eksperimenti su pokazali da se najbolji odziv dobija za Td=0.315. • Takahashi
Pored paralelnog PIDa formiran je i Takahashiev PID u skladu sa relacijom (5.57). i i i
t p t d t t 1 t t i t t 1u K y K (y y ) u , u K e u− −= − − − + = + Eksperimentalno je utvrđeno da Takahashijev PID može zadovoljavajuće da radi za periode
odabiranja T≤0.1. Izuzetno dobri rezultati se dobijaju za T=0.06, što je i usvojeno u simulaciji.
Rezul tat i Odskočni odzivi dobijenih PIDova, kao i odgovarajući signali upravljanja pokazuju da su, u
poređenju sa kontinualnim sistemom, sva rešenja prihvatljiva. Pri tome, treba imati na umu da su u početnim trenucima upravljački signali svih diskretnih PIDova izuzev Takahashijevog izuzetno veliki (35 do 50) pa je pitanje da li bi kod realnog sistema izvršni organi mogli da prihvate toliko veliki signal i da ga prenesu kroz proces ili bi ušli u zasićenje. U ovom drugom, verovatnijem slučaju, došlo bi do izvesne degradacije u ponašanju diskretnih PIDova, jer bi se u početnom trenutku odzivi nešto sporije menjali.
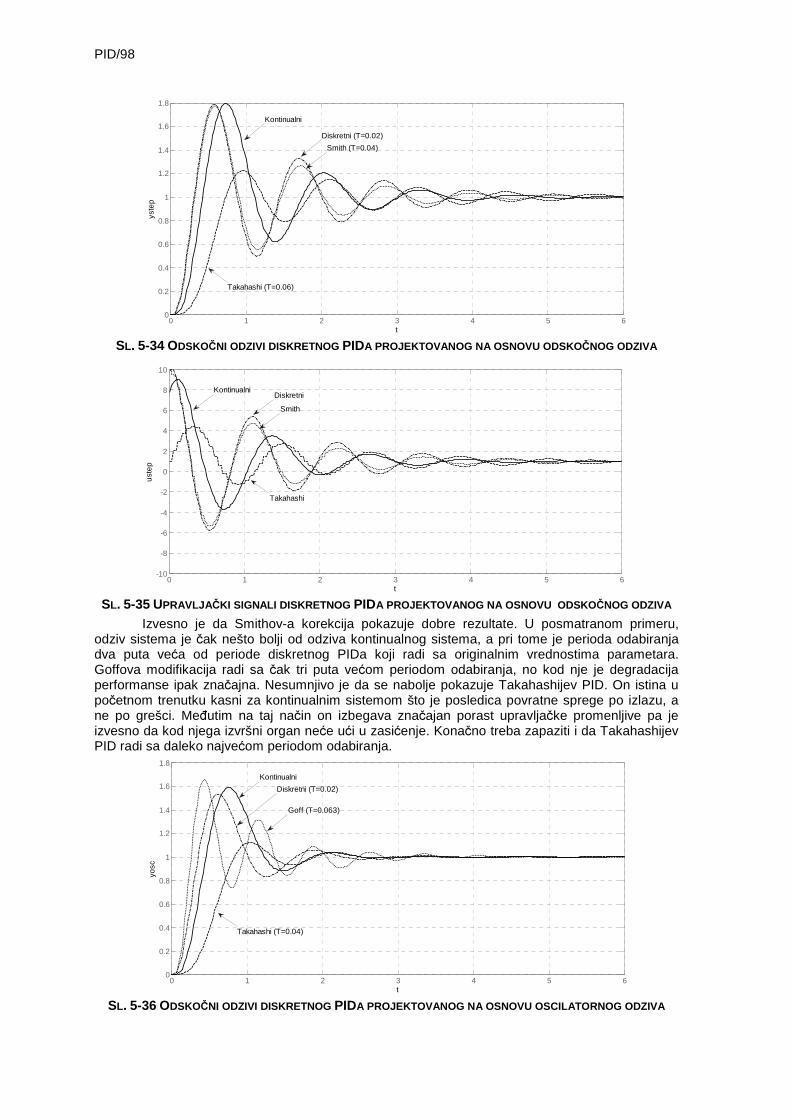
PID/98
SL. 5-34 ODSKOČNI ODZIVI DISKRETNOG PIDA PROJEKTOVANOG NA OSNOVU ODSKO ČNOG ODZIVA
SL. 5-35 UPRAVLJAČKI SIGNALI DISKRETNOG PIDA PROJEKTOVANOG NA OSNOVU ODSKO ČNOG ODZIVA
Izvesno je da Smithov-a korekcija pokazuje dobre rezultate. U posmatranom primeru, odziv sistema je čak nešto bolji od odziva kontinualnog sistema, a pri tome je perioda odabiranja dva puta veća od periode diskretnog PIDa koji radi sa originalnim vrednostima parametara. Goffova modifikacija radi sa čak tri puta većom periodom odabiranja, no kod nje je degradacija performanse ipak značajna. Nesumnjivo je da se nabolje pokazuje Takahashijev PID. On istina u početnom trenutku kasni za kontinualnim sistemom što je posledica povratne sprege po izlazu, a ne po grešci. Međutim na taj način on izbegava značajan porast upravljačke promenljive pa je izvesno da kod njega izvršni organ neće ući u zasićenje. Konačno treba zapaziti i da Takahashijev PID radi sa daleko najvećom periodom odabiranja.
SL. 5-36 ODSKOČNI ODZIVI DISKRETNOG PIDA PROJEKTOVANOG NA OSNOVU OSCILATORNOG ODZIVA
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
t
yste
p
Kontinualni
Takahashi (T=0.06)
Diskretni (T=0.02)
Smith (T=0.04)
0 1 2 3 4 5 6-10
-8
-6
-4
-2
0
2
4
6
8
10
t
ust
ep
KontinualniDiskretni
Smith
Takahashi
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
t
yosc
Kontinualni
Takahashi (T=0.04)
Diskretni (T=0.02)
Goff (T=0.063)
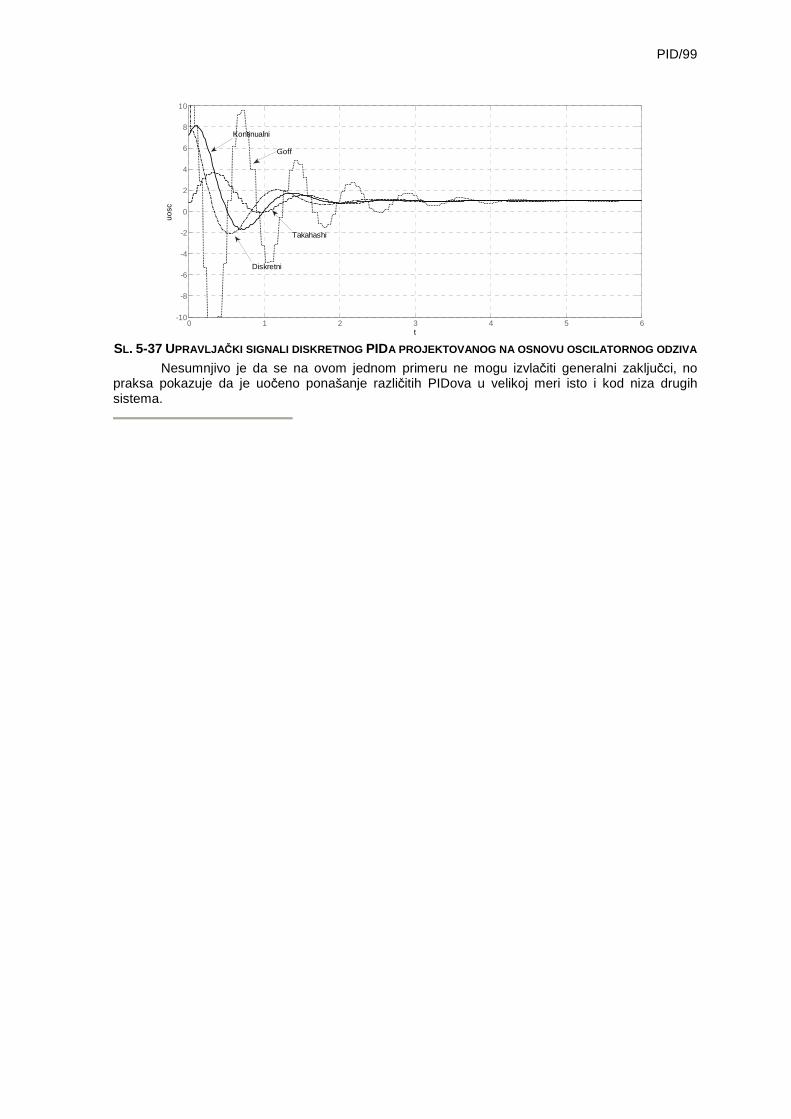
PID/99
SL. 5-37 UPRAVLJAČKI SIGNALI DISKRETNOG PIDA PROJEKTOVANOG NA OSNOVU OSCILATORNOG ODZIVA
Nesumnjivo je da se na ovom jednom primeru ne mogu izvlačiti generalni zaključci, no praksa pokazuje da je uočeno ponašanje različitih PIDova u velikoj meri isto i kod niza drugih sistema.
0 1 2 3 4 5 6-10
-8
-6
-4
-2
0
2
4
6
8
10
t
uo
sc
Diskretni
Goff
Kontinualni
Takahashi

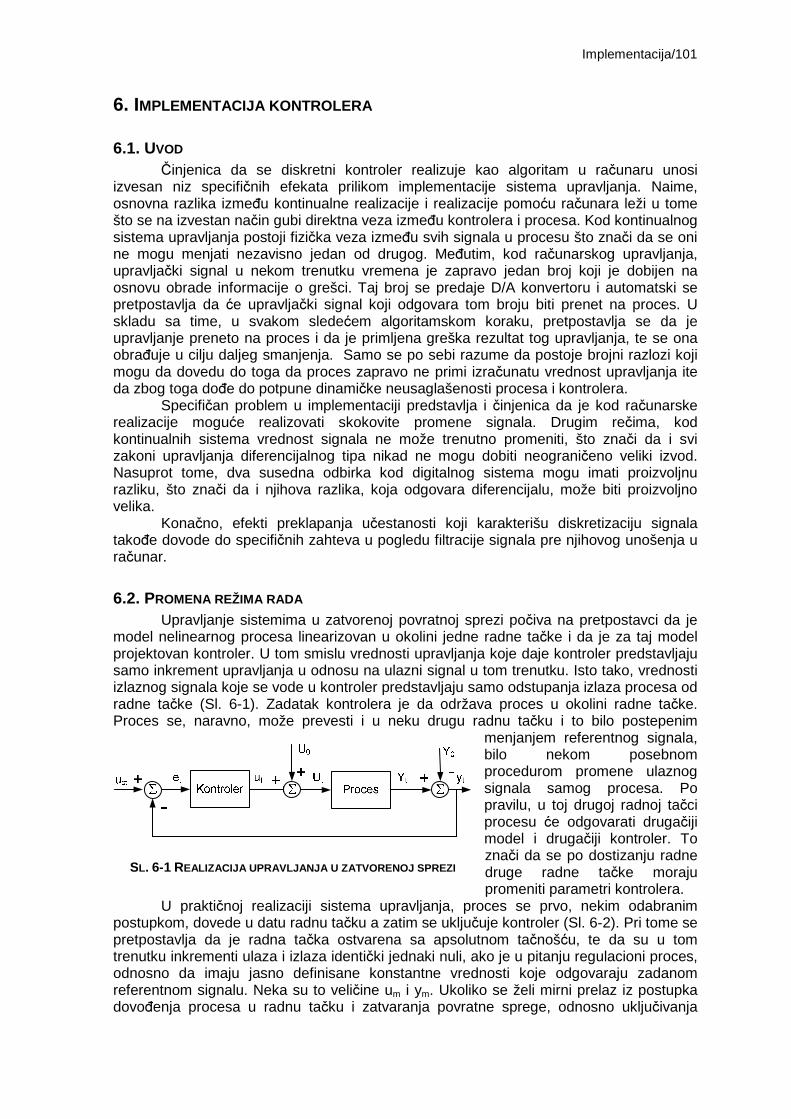
Implementacija/101
6. IMPLEMENTACIJA KONTROLERA
6.1. UVOD Činjenica da se diskretni kontroler realizuje kao algoritam u računaru unosi
izvesan niz specifičnih efekata prilikom implementacije sistema upravljanja. Naime, osnovna razlika između kontinualne realizacije i realizacije pomoću računara leži u tome što se na izvestan način gubi direktna veza između kontrolera i procesa. Kod kontinualnog sistema upravljanja postoji fizička veza između svih signala u procesu što znači da se oni ne mogu menjati nezavisno jedan od drugog. Međutim, kod računarskog upravljanja, upravljački signal u nekom trenutku vremena je zapravo jedan broj koji je dobijen na osnovu obrade informacije o grešci. Taj broj se predaje D/A konvertoru i automatski se pretpostavlja da će upravljački signal koji odgovara tom broju biti prenet na proces. U skladu sa time, u svakom sledećem algoritamskom koraku, pretpostavlja se da je upravljanje preneto na proces i da je primljena greška rezultat tog upravljanja, te se ona obrađuje u cilju daljeg smanjenja. Samo se po sebi razume da postoje brojni razlozi koji mogu da dovedu do toga da proces zapravo ne primi izračunatu vrednost upravljanja ite da zbog toga dođe do potpune dinamičke neusaglašenosti procesa i kontrolera.
Specifičan problem u implementaciji predstavlja i činjenica da je kod računarske realizacije moguće realizovati skokovite promene signala. Drugim rečima, kod kontinualnih sistema vrednost signala ne može trenutno promeniti, što znači da i svi zakoni upravljanja diferencijalnog tipa nikad ne mogu dobiti neograničeno veliki izvod. Nasuprot tome, dva susedna odbirka kod digitalnog sistema mogu imati proizvoljnu razliku, što znači da i njihova razlika, koja odgovara diferencijalu, može biti proizvoljno velika.
Konačno, efekti preklapanja učestanosti koji karakterišu diskretizaciju signala takođe dovode do specifičnih zahteva u pogledu filtracije signala pre njihovog unošenja u računar.
6.2. PROMENA REŽIMA RADA Upravljanje sistemima u zatvorenoj povratnoj sprezi počiva na pretpostavci da je
model nelinearnog procesa linearizovan u okolini jedne radne tačke i da je za taj model projektovan kontroler. U tom smislu vrednosti upravljanja koje daje kontroler predstavljaju samo inkrement upravljanja u odnosu na ulazni signal u tom trenutku. Isto tako, vrednosti izlaznog signala koje se vode u kontroler predstavljaju samo odstupanja izlaza procesa od radne tačke (Sl. 6-1). Zadatak kontrolera je da održava proces u okolini radne tačke. Proces se, naravno, može prevesti i u neku drugu radnu tačku i to bilo postepenim
menjanjem referentnog signala, bilo nekom posebnom procedurom promene ulaznog signala samog procesa. Po pravilu, u toj drugoj radnoj tačci procesu će odgovarati drugačiji model i drugačiji kontroler. To znači da se po dostizanju radne druge radne tačke moraju promeniti parametri kontrolera.
U praktičnoj realizaciji sistema upravljanja, proces se prvo, nekim odabranim postupkom, dovede u datu radnu tačku a zatim se uključuje kontroler (Sl. 6-2). Pri tome se pretpostavlja da je radna tačka ostvarena sa apsolutnom tačnošću, te da su u tom trenutku inkrementi ulaza i izlaza identički jednaki nuli, ako je u pitanju regulacioni proces, odnosno da imaju jasno definisane konstantne vrednosti koje odgovaraju zadanom referentnom signalu. Neka su to veličine um i ym. Ukoliko se želi mirni prelaz iz postupka dovođenja procesa u radnu tačku i zatvaranja povratne sprege, odnosno uključivanja
SL. 6-1 REALIZACIJA UPRAVLJANJA U ZATVORENOJ SPREZI
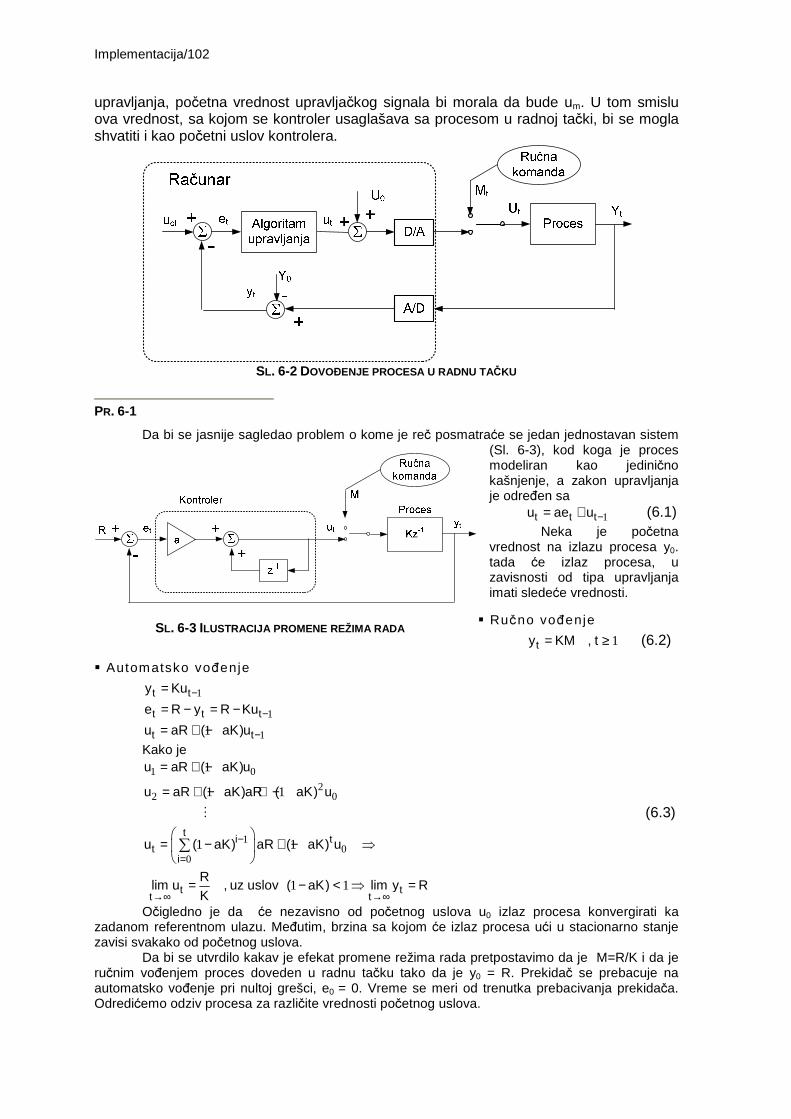
Implementacija/102
upravljanja, početna vrednost upravljačkog signala bi morala da bude um. U tom smislu ova vrednost, sa kojom se kontroler usaglašava sa procesom u radnoj tački, bi se mogla shvatiti i kao početni uslov kontrolera.
SL. 6-2 DOVOĐENJE PROCESA U RADNU TAČKU
PR. 6-1
Da bi se jasnije sagledao problem o kome je reč posmatraće se jedan jednostavan sistem (Sl. 6-3), kod koga je proces modeliran kao jedinično kašnjenje, a zakon upravljanja je određen sa
1t t tu ae u −= + (6.1) Neka je početna
vrednost na izlazu procesa y0. tada će izlaz procesa, u zavisnosti od tipa upravljanja imati sledeće vrednosti.
Ručno vođenje
1ty KM , t= ≥ (6.2)
Automatsko vođenje
1
1
11
t t
t t t
t t
y Ku
e R y R Ku
u aR ( aK)u
−
−
−
== − = −= + −
Kako je
1 0
22 0
10
0
1
1 1
1 1
1 1
ti t
ti
t tt t
u aR ( aK)u
u aR ( aK)aR ( aK) u
u ( aK) aR ( aK) u
Rlim u , uz uslov ( aK) lim y R
K
−
=
→∞ →∞
= + −
= + − + −
= − + − ⇒
= − < ⇒ =
∑
M (6.3)
Očigledno je da će nezavisno od početnog uslova u0 izlaz procesa konvergirati ka zadanom referentnom ulazu. Međutim, brzina sa kojom će izlaz procesa ući u stacionarno stanje zavisi svakako od početnog uslova.
Da bi se utvrdilo kakav je efekat promene režima rada pretpostavimo da je M=R/K i da je ručnim vođenjem proces doveden u radnu tačku tako da je y0 = R. Prekidač se prebacuje na automatsko vođenje pri nultoj grešci, e0 = 0. Vreme se meri od trenutka prebacivanja prekidača. Odredićemo odziv procesa za različite vrednosti početnog uslova.
SL. 6-3 ILUSTRACIJA PROMENE REŽIMA RADA
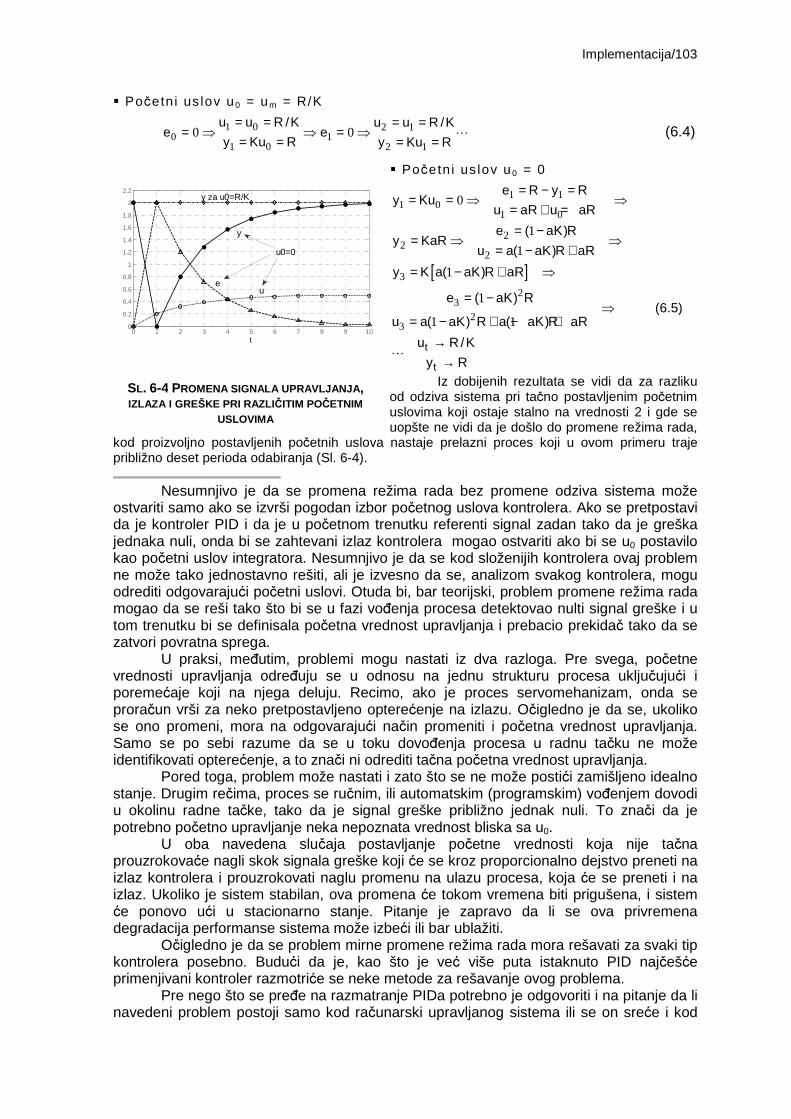
Implementacija/103
Početn i us lov u 0 = um = R/K
1 0 2 10 1
1 0 2 10 0
u u R /K u u R /Ke e
y Ku R y Ku R
= = = == ⇒ ⇒ = ⇒
= = = =L (6.4)
Početn i us lov u 0 = 0
1 11 0
1 0
22
2
0
1
1
e R y Ry Ku
u aR u aR
e ( aK)Ry KaR
u a( aK)R aR
= − == = ⇒ ⇒
= + == −
= ⇒ ⇒
= − +
[ ]3
23
23
1
1
1 1
t
t
y K a( aK)R aR
e ( aK) R
u a( aK) R a( aK)R aR
u R /K
y R
= − + ⇒
= −⇒
= − + − +→
→L
(6.5)
Iz dobijenih rezultata se vidi da za razliku od odziva sistema pri tačno postavljenim početnim uslovima koji ostaje stalno na vrednosti 2 i gde se uopšte ne vidi da je došlo do promene režima rada,
kod proizvoljno postavljenih početnih uslova nastaje prelazni proces koji u ovom primeru traje približno deset perioda odabiranja (Sl. 6-4).
Nesumnjivo je da se promena režima rada bez promene odziva sistema može
ostvariti samo ako se izvrši pogodan izbor početnog uslova kontrolera. Ako se pretpostavi da je kontroler PID i da je u početnom trenutku referenti signal zadan tako da je greška jednaka nuli, onda bi se zahtevani izlaz kontrolera mogao ostvariti ako bi se u0 postavilo kao početni uslov integratora. Nesumnjivo je da se kod složenijih kontrolera ovaj problem ne može tako jednostavno rešiti, ali je izvesno da se, analizom svakog kontrolera, mogu odrediti odgovarajući početni uslovi. Otuda bi, bar teorijski, problem promene režima rada mogao da se reši tako što bi se u fazi vođenja procesa detektovao nulti signal greške i u tom trenutku bi se definisala početna vrednost upravljanja i prebacio prekidač tako da se zatvori povratna sprega.
U praksi, međutim, problemi mogu nastati iz dva razloga. Pre svega, početne vrednosti upravljanja određuju se u odnosu na jednu strukturu procesa uključujući i poremećaje koji na njega deluju. Recimo, ako je proces servomehanizam, onda se proračun vrši za neko pretpostavljeno opterećenje na izlazu. Očigledno je da se, ukoliko se ono promeni, mora na odgovarajući način promeniti i početna vrednost upravljanja. Samo se po sebi razume da se u toku dovođenja procesa u radnu tačku ne može identifikovati opterećenje, a to znači ni odrediti tačna početna vrednost upravljanja.
Pored toga, problem može nastati i zato što se ne može postići zamišljeno idealno stanje. Drugim rečima, proces se ručnim, ili automatskim (programskim) vođenjem dovodi u okolinu radne tačke, tako da je signal greške približno jednak nuli. To znači da je potrebno početno upravljanje neka nepoznata vrednost bliska sa u0.
U oba navedena slučaja postavljanje početne vrednosti koja nije tačna prouzrokovaće nagli skok signala greške koji će se kroz proporcionalno dejstvo preneti na izlaz kontrolera i prouzrokovati naglu promenu na ulazu procesa, koja će se preneti i na izlaz. Ukoliko je sistem stabilan, ova promena će tokom vremena biti prigušena, i sistem će ponovo ući u stacionarno stanje. Pitanje je zapravo da li se ova privremena degradacija performanse sistema može izbeći ili bar ublažiti.
Očigledno je da se problem mirne promene režima rada mora rešavati za svaki tip kontrolera posebno. Budući da je, kao što je već više puta istaknuto PID najčešće primenjivani kontroler razmotriće se neke metode za rešavanje ovog problema.
Pre nego što se pređe na razmatranje PIDa potrebno je odgovoriti i na pitanje da li navedeni problem postoji samo kod računarski upravljanog sistema ili se on sreće i kod
SL. 6-4 PROMENA SIGNALA UPRAVLJANJA , IZLAZA I GREŠKE PRI RAZLI ČITIM POČETNIM
USLOVIMA
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
t
y za u0=R/K
u0=0
u
y
e
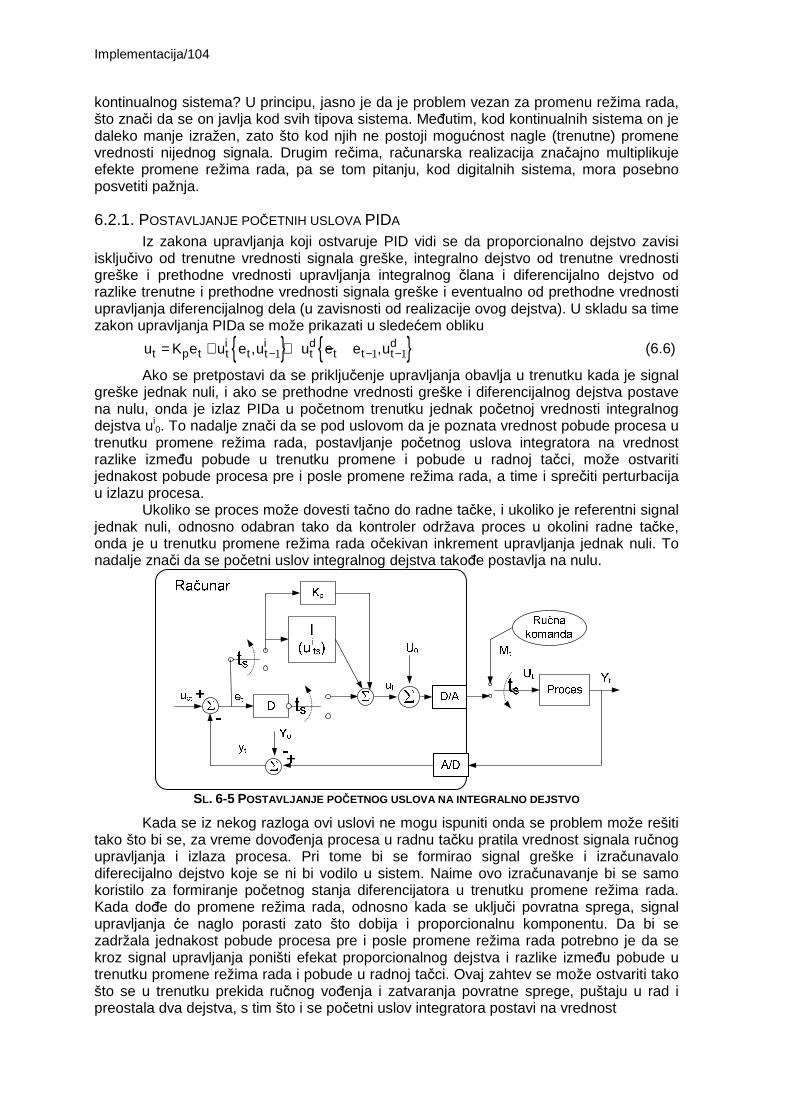
Implementacija/104
kontinualnog sistema? U principu, jasno je da je problem vezan za promenu režima rada, što znači da se on javlja kod svih tipova sistema. Međutim, kod kontinualnih sistema on je daleko manje izražen, zato što kod njih ne postoji mogućnost nagle (trenutne) promene vrednosti nijednog signala. Drugim rečima, računarska realizacija značajno multiplikuje efekte promene režima rada, pa se tom pitanju, kod digitalnih sistema, mora posebno posvetiti pažnja.
6.2.1. POSTAVLJANJE POČETNIH USLOVA PIDA Iz zakona upravljanja koji ostvaruje PID vidi se da proporcionalno dejstvo zavisi
isključivo od trenutne vrednosti signala greške, integralno dejstvo od trenutne vrednosti greške i prethodne vrednosti upravljanja integralnog člana i diferencijalno dejstvo od razlike trenutne i prethodne vrednosti signala greške i eventualno od prethodne vrednosti upravljanja diferencijalnog dela (u zavisnosti od realizacije ovog dejstva). U skladu sa time zakon upravljanja PIDa se može prikazati u sledećem obliku
1 1 1i i d d
t p t t t t t t t tu K e u e ,u u e e ,u− − −= + + − (6.6)
Ako se pretpostavi da se priključenje upravljanja obavlja u trenutku kada je signal greške jednak nuli, i ako se prethodne vrednosti greške i diferencijalnog dejstva postave na nulu, onda je izlaz PIDa u početnom trenutku jednak početnoj vrednosti integralnog dejstva ui
0. To nadalje znači da se pod uslovom da je poznata vrednost pobude procesa u trenutku promene režima rada, postavljanje početnog uslova integratora na vrednost razlike između pobude u trenutku promene i pobude u radnoj tačci, može ostvariti jednakost pobude procesa pre i posle promene režima rada, a time i sprečiti perturbacija u izlazu procesa.
Ukoliko se proces može dovesti tačno do radne tačke, i ukoliko je referentni signal jednak nuli, odnosno odabran tako da kontroler održava proces u okolini radne tačke, onda je u trenutku promene režima rada očekivan inkrement upravljanja jednak nuli. To nadalje znači da se početni uslov integralnog dejstva takođe postavlja na nulu.
SL. 6-5 POSTAVLJANJE PO ČETNOG USLOVA NA INTEGRALNO DEJSTVO
Kada se iz nekog razloga ovi uslovi ne mogu ispuniti onda se problem može rešiti tako što bi se, za vreme dovođenja procesa u radnu tačku pratila vrednost signala ručnog upravljanja i izlaza procesa. Pri tome bi se formirao signal greške i izračunavalo diferecijalno dejstvo koje se ni bi vodilo u sistem. Naime ovo izračunavanje bi se samo koristilo za formiranje početnog stanja diferencijatora u trenutku promene režima rada. Kada dođe do promene režima rada, odnosno kada se uključi povratna sprega, signal upravljanja će naglo porasti zato što dobija i proporcionalnu komponentu. Da bi se zadržala jednakost pobude procesa pre i posle promene režima rada potrebno je da se kroz signal upravljanja poništi efekat proporcionalnog dejstva i razlike između pobude u trenutku promene režima rada i pobude u radnoj tačci. Ovaj zahtev se može ostvariti tako što se u trenutku prekida ručnog vođenja i zatvaranja povratne sprege, puštaju u rad i preostala dva dejstva, s tim što i se početni uslov integratora postavi na vrednost
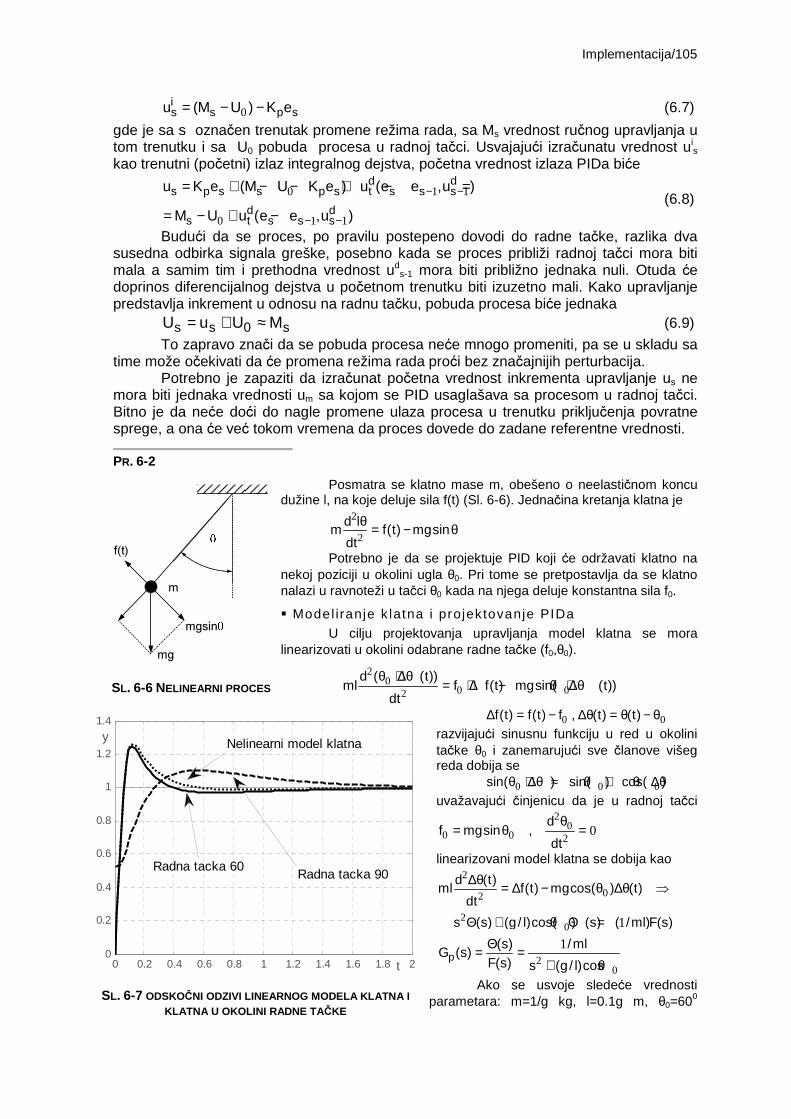
Implementacija/105
0is s p su (M U ) K e= − − (6.7)
gde je sa s označen trenutak promene režima rada, sa Ms vrednost ručnog upravljanja u tom trenutku i sa U0 pobuda procesa u radnoj tačci. Usvajajući izračunatu vrednost ui
s kao trenutni (početni) izlaz integralnog dejstva, početna vrednost izlaza PIDa biće
0 1 1
0 1 1
d ds p s s p s t s s s
d ds t s s s
u K e (M U K e ) u (e e ,u )
M U u (e e ,u )
− −
− −
= + − − + − =
= − + − (6.8)
Budući da se proces, po pravilu postepeno dovodi do radne tačke, razlika dva susedna odbirka signala greške, posebno kada se proces približi radnoj tačci mora biti mala a samim tim i prethodna vrednost ud
s-1 mora biti približno jednaka nuli. Otuda će doprinos diferencijalnog dejstva u početnom trenutku biti izuzetno mali. Kako upravljanje predstavlja inkrement u odnosu na radnu tačku, pobuda procesa biće jednaka
s0ss MUuU ≈+= (6.9)
To zapravo znači da se pobuda procesa neće mnogo promeniti, pa se u skladu sa time može očekivati da će promena režima rada proći bez značajnijih perturbacija.
Potrebno je zapaziti da izračunat početna vrednost inkrementa upravljanje us ne mora biti jednaka vrednosti um sa kojom se PID usaglašava sa procesom u radnoj tačci. Bitno je da neće doći do nagle promene ulaza procesa u trenutku priključenja povratne sprege, a ona će već tokom vremena da proces dovede do zadane referentne vrednosti.
PR. 6-2
Posmatra se klatno mase m, obešeno o neelastičnom koncu dužine l, na koje deluje sila f(t) (Sl. 6-6). Jednačina kretanja klatna je
2
2
d lm f(t) mgsin
dt
θ = − θ
Potrebno je da se projektuje PID koji će održavati klatno na nekoj poziciji u okolini ugla θ0. Pri tome se pretpostavlja da se klatno nalazi u ravnoteži u tačci θ0 kada na njega deluje konstantna sila f0.
Model iranje k latna i projek tovanje PIDa
U cilju projektovanja upravljanja model klatna se mora linearizovati u okolini odabrane radne tačke (f0,θ0).
20
0 02
d ( (t))ml f f(t) mgsin( (t))
dt
θ + ∆θ= + ∆ − θ + ∆θ
0 0f(t) f(t) f , (t) (t)∆ = − ∆θ = θ − θ razvijajući sinusnu funkciju u red u okolini tačke θ0 i zanemarujući sve članove višeg reda dobija se
0 0 0sin( ) sin( ) cos( )θ + ∆θ ≈ θ + θ ∆θ uvažavajući činjenicu da je u radnoj tačci
20
0 0 20
df mgsin ,
dt
θ= θ =
linearizovani model klatna se dobija kao 2
02
20 1
d (t)ml f(t) mgcos( ) (t)
dt
s (s) (g / l)cos( ) (s) ( /ml)F(s)
∆θ = ∆ − θ ∆θ ⇒
Θ + θ Θ =
20
1p
(s) /mlG (s)
F(s) s (g/ l)cos
Θ= =+ θ
Ako se usvoje sledeće vrednosti parametara: m=1/g kg, l=0.1g m, θ0=600
SL. 6-6 NELINEARNI PROCES
SL. 6-7 ODSKOČNI ODZIVI LINEARNOG MODELA KLATNA I KLATNA U OKOLINI RADNE TA ČKE
f(t)
mg
mgsin
m
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
1.2
1.4
t
y Nelinearni model klatna
Radna tacka 60Radna tacka 90
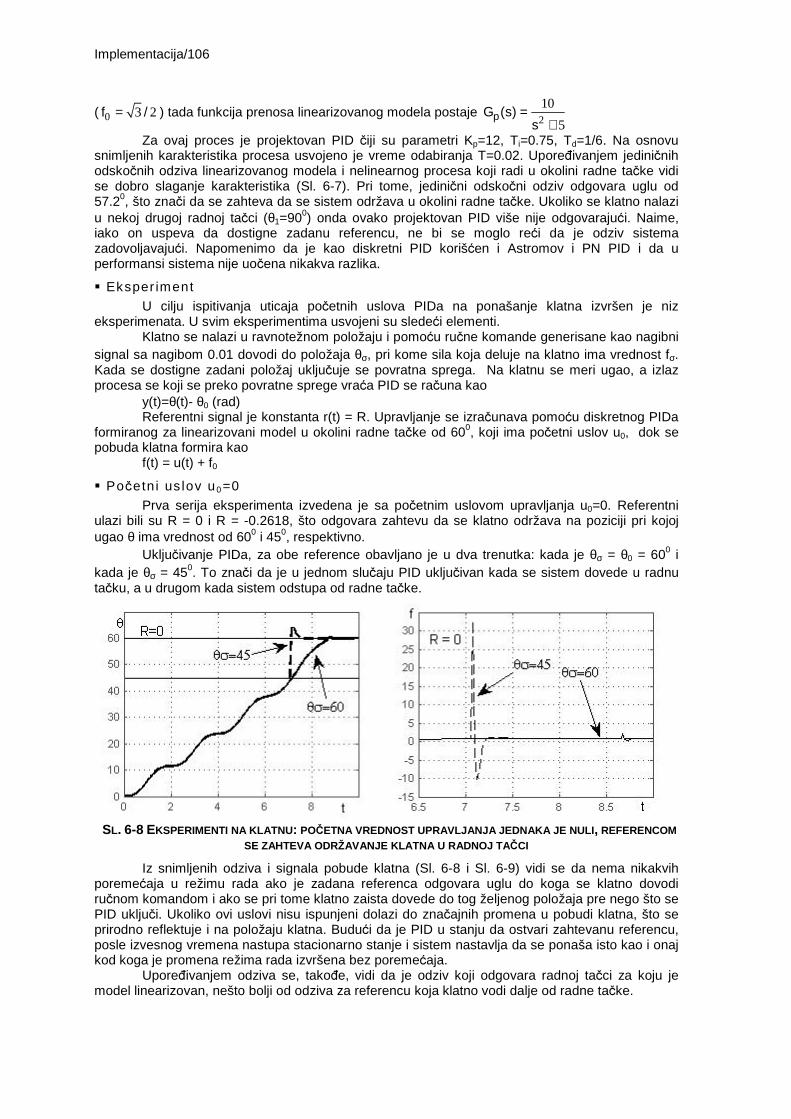
Implementacija/106
( 0 3 2f /= ) tada funkcija prenosa linearizovanog modela postaje 2
10
5pG (s)
s=
+
Za ovaj proces je projektovan PID čiji su parametri Kp=12, Ti=0.75, Td=1/6. Na osnovu snimljenih karakteristika procesa usvojeno je vreme odabiranja T=0.02. Upoređivanjem jediničnih odskočnih odziva linearizovanog modela i nelinearnog procesa koji radi u okolini radne tačke vidi se dobro slaganje karakteristika (Sl. 6-7). Pri tome, jedinični odskočni odziv odgovara uglu od 57.20, što znači da se zahteva da se sistem održava u okolini radne tačke. Ukoliko se klatno nalazi u nekoj drugoj radnoj tačci (θ1=900) onda ovako projektovan PID više nije odgovarajući. Naime, iako on uspeva da dostigne zadanu referencu, ne bi se moglo reći da je odziv sistema zadovoljavajući. Napomenimo da je kao diskretni PID korišćen i Astromov i PN PID i da u performansi sistema nije uočena nikakva razlika.
Eksper iment
U cilju ispitivanja uticaja početnih uslova PIDa na ponašanje klatna izvršen je niz eksperimenata. U svim eksperimentima usvojeni su sledeći elementi.
Klatno se nalazi u ravnotežnom položaju i pomoću ručne komande generisane kao nagibni signal sa nagibom 0.01 dovodi do položaja θσ, pri kome sila koja deluje na klatno ima vrednost fσ. Kada se dostigne zadani položaj uključuje se povratna sprega. Na klatnu se meri ugao, a izlaz procesa se koji se preko povratne sprege vraća PID se računa kao
y(t)=θ(t)- θ0 (rad) Referentni signal je konstanta r(t) = R. Upravljanje se izračunava pomoću diskretnog PIDa
formiranog za linearizovani model u okolini radne tačke od 600, koji ima početni uslov u0, dok se pobuda klatna formira kao
f(t) = u(t) + f0
Početn i us lov u0=0
Prva serija eksperimenta izvedena je sa početnim uslovom upravljanja u0=0. Referentni ulazi bili su R = 0 i R = -0.2618, što odgovara zahtevu da se klatno održava na poziciji pri kojoj ugao θ ima vrednost od 600 i 450, respektivno.
Uključivanje PIDa, za obe reference obavljano je u dva trenutka: kada je θσ = θ0 = 600 i kada je θσ = 450. To znači da je u jednom slučaju PID uključivan kada se sistem dovede u radnu tačku, a u drugom kada sistem odstupa od radne tačke.
SL. 6-8 EKSPERIMENTI NA KLATNU : POČETNA VREDNOST UPRAVLJANJA JEDNAKA JE NULI , REFERENCOM
SE ZAHTEVA ODRŽAVANJE KLATNA U RADNOJ TA ČCI
Iz snimljenih odziva i signala pobude klatna (Sl. 6-8 i Sl. 6-9) vidi se da nema nikakvih poremećaja u režimu rada ako je zadana referenca odgovara uglu do koga se klatno dovodi ručnom komandom i ako se pri tome klatno zaista dovede do tog željenog položaja pre nego što se PID uključi. Ukoliko ovi uslovi nisu ispunjeni dolazi do značajnih promena u pobudi klatna, što se prirodno reflektuje i na položaju klatna. Budući da je PID u stanju da ostvari zahtevanu referencu, posle izvesnog vremena nastupa stacionarno stanje i sistem nastavlja da se ponaša isto kao i onaj kod koga je promena režima rada izvršena bez poremećaja.
Upoređivanjem odziva se, takođe, vidi da je odziv koji odgovara radnoj tačci za koju je model linearizovan, nešto bolji od odziva za referencu koja klatno vodi dalje od radne tačke.
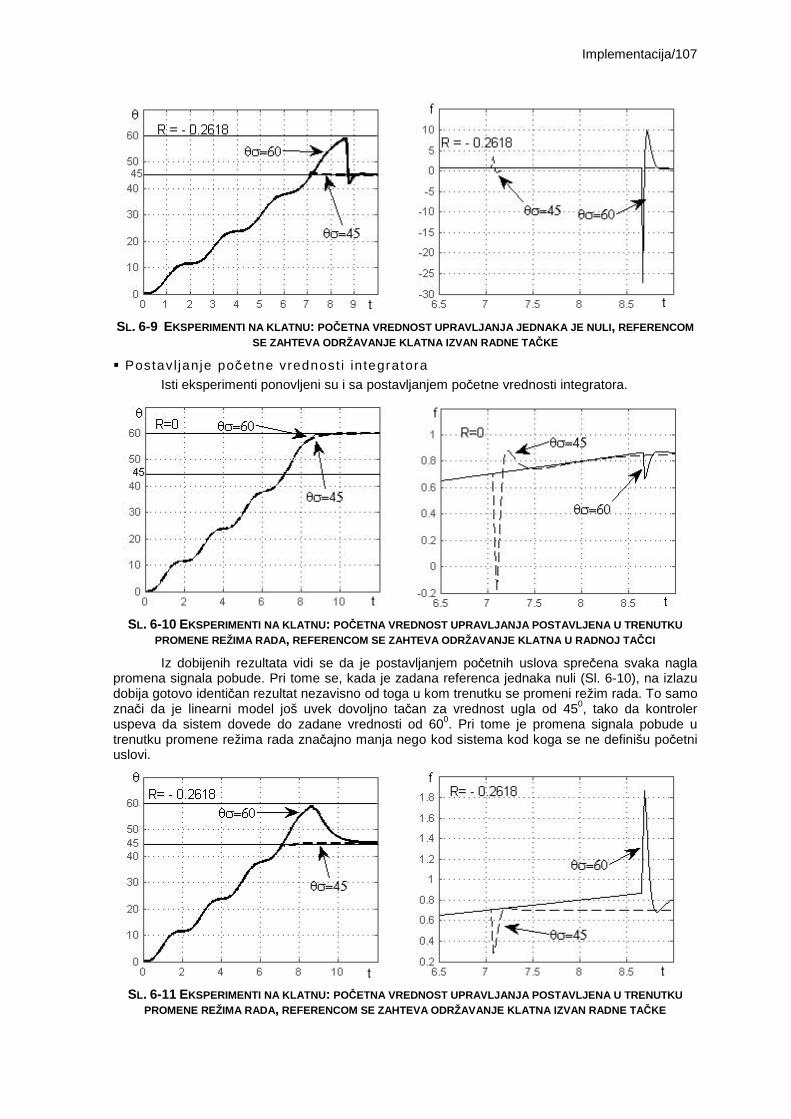
Implementacija/107
SL. 6-9 EKSPERIMENTI NA KLATNU : POČETNA VREDNOST UPRAVLJANJA JEDNAKA JE NULI , REFERENCOM
SE ZAHTEVA ODRŽAVANJE KLATNA IZVAN RADNE TA ČKE
Postavl janje početne vrednost i in tegratora
Isti eksperimenti ponovljeni su i sa postavljanjem početne vrednosti integratora.
SL. 6-10 EKSPERIMENTI NA KLATNU : POČETNA VREDNOST UPRAVLJANJA POSTAVLJENA U TRENUTKU
PROMENE REŽIMA RADA , REFERENCOM SE ZAHTEVA ODRŽAVANJE KLATNA U RADNOJ T AČCI
Iz dobijenih rezultata vidi se da je postavljanjem početnih uslova sprečena svaka nagla promena signala pobude. Pri tome se, kada je zadana referenca jednaka nuli (Sl. 6-10), na izlazu dobija gotovo identičan rezultat nezavisno od toga u kom trenutku se promeni režim rada. To samo znači da je linearni model još uvek dovoljno tačan za vrednost ugla od 450, tako da kontroler uspeva da sistem dovede do zadane vrednosti od 600. Pri tome je promena signala pobude u trenutku promene režima rada značajno manja nego kod sistema kod koga se ne definišu početni uslovi.
SL. 6-11 EKSPERIMENTI NA KLATNU : POČETNA VREDNOST UPRAVLJANJA POSTAVLJENA U TRENUTKU
PROMENE REŽIMA RADA , REFERENCOM SE ZAHTEVA ODRŽAVANJE KLATNA IZVAN RADN E TAČKE
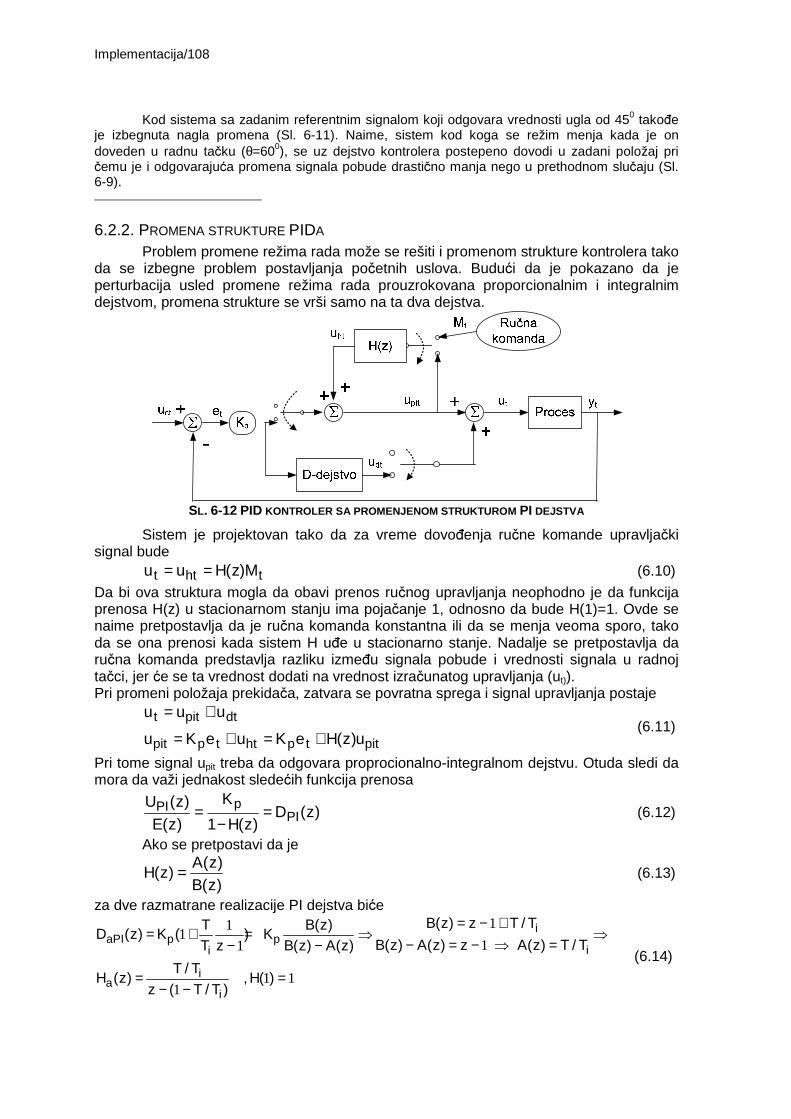
Implementacija/108
Kod sistema sa zadanim referentnim signalom koji odgovara vrednosti ugla od 450 takođe
je izbegnuta nagla promena (Sl. 6-11). Naime, sistem kod koga se režim menja kada je on doveden u radnu tačku (θ=600), se uz dejstvo kontrolera postepeno dovodi u zadani položaj pri čemu je i odgovarajuća promena signala pobude drastično manja nego u prethodnom slučaju (Sl. 6-9).
6.2.2. PROMENA STRUKTURE PIDA Problem promene režima rada može se rešiti i promenom strukture kontrolera tako
da se izbegne problem postavljanja početnih uslova. Budući da je pokazano da je perturbacija usled promene režima rada prouzrokovana proporcionalnim i integralnim dejstvom, promena strukture se vrši samo na ta dva dejstva.
SL. 6-12 PID KONTROLER SA PROMENJENOM STRUKTUROM PI DEJSTVA
Sistem je projektovan tako da za vreme dovođenja ručne komande upravljački signal bude
thtt z)M(Huu == (6.10)
Da bi ova struktura mogla da obavi prenos ručnog upravljanja neophodno je da funkcija prenosa H(z) u stacionarnom stanju ima pojačanje 1, odnosno da bude H(1)=1. Ovde se naime pretpostavlja da je ručna komanda konstantna ili da se menja veoma sporo, tako da se ona prenosi kada sistem H uđe u stacionarno stanje. Nadalje se pretpostavlja da ručna komanda predstavlja razliku između signala pobude i vrednosti signala u radnoj tačci, jer će se ta vrednost dodati na vrednost izračunatog upravljanja (ut)). Pri promeni položaja prekidača, zatvara se povratna sprega i signal upravljanja postaje
pittphttppit
dtpitt
u)z(HeKueKu
uuu
+=+=
+= (6.11)
Pri tome signal upit treba da odgovara proprocionalno-integralnom dejstvu. Otuda sledi da mora da važi jednakost sledećih funkcija prenosa
)z(D)z(H1
K
)z(E)z(U
PIpPI =
−= (6.12)
Ako se pretpostavi da je
)z(B)z(A
)z(H = (6.13)
za dve razmatrane realizacije PI dejstva biće 11
111
1 11
iaPI p p
ii
ia
i
B(z) z T / TT B(z)D (z) K ( ) K
B(z) A(z) z A(z) T / TT z B(z) A(z)
T / TH (z) ,H( )
z ( T / T )
= − += + = ⇒ ⇒
− = − ⇒ =− −
= =− −
(6.14)
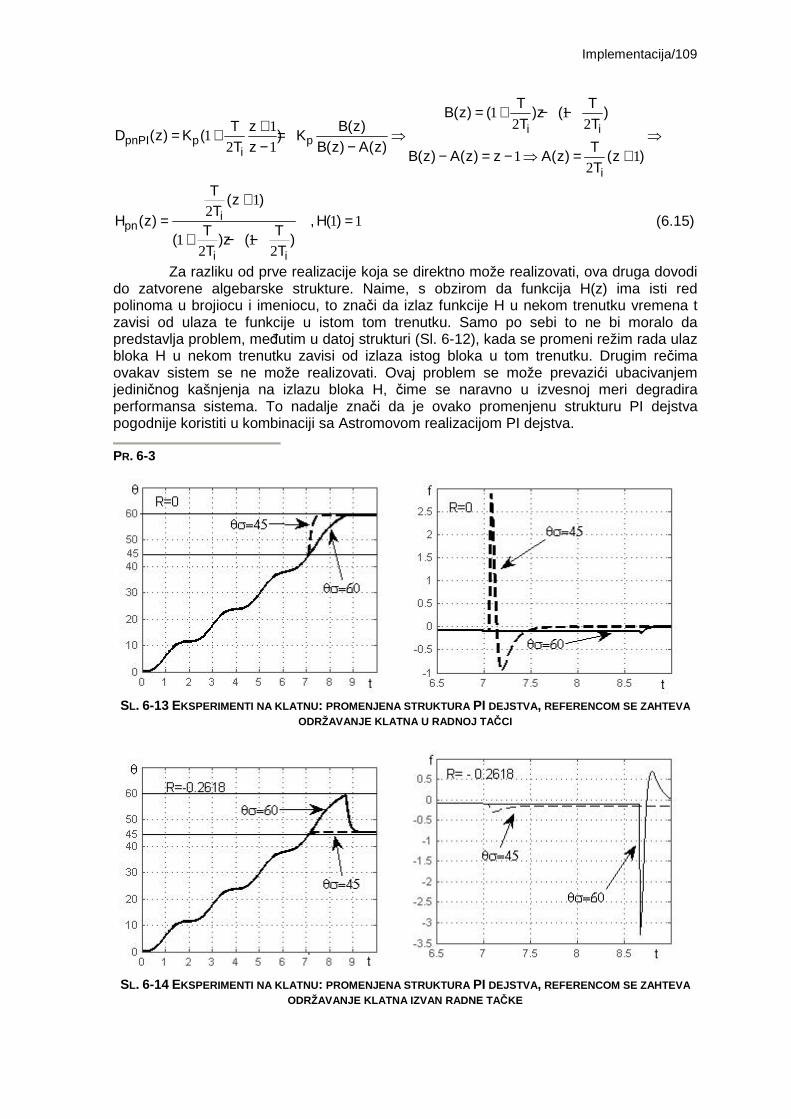
Implementacija/109
1 12 21
12 1
1 12
i ipnPI p p
i
i
T TB(z) ( )z ( )
T TT z B(z)D (z) K ( ) K
TT z B(z) A(z)B(z) A(z) z A(z) (z )
T
= + − −+= + = ⇒ ⇒
− − − = − ⇒ = +
12
1 11 1
2 2
ipn
i i
T(z )
TH (z) , H( )
T T( )z ( )
T T
+= =
+ − − (6.15)
Za razliku od prve realizacije koja se direktno može realizovati, ova druga dovodi do zatvorene algebarske strukture. Naime, s obzirom da funkcija H(z) ima isti red polinoma u brojiocu i imeniocu, to znači da izlaz funkcije H u nekom trenutku vremena t zavisi od ulaza te funkcije u istom tom trenutku. Samo po sebi to ne bi moralo da predstavlja problem, međutim u datoj strukturi (Sl. 6-12), kada se promeni režim rada ulaz bloka H u nekom trenutku zavisi od izlaza istog bloka u tom trenutku. Drugim rečima ovakav sistem se ne može realizovati. Ovaj problem se može prevazići ubacivanjem jediničnog kašnjenja na izlazu bloka H, čime se naravno u izvesnoj meri degradira performansa sistema. To nadalje znači da je ovako promenjenu strukturu PI dejstva pogodnije koristiti u kombinaciji sa Astromovom realizacijom PI dejstva.
PR. 6-3
SL. 6-13 EKSPERIMENTI NA KLATNU : PROMENJENA STRUKTURA PI DEJSTVA, REFERENCOM SE ZAHTEVA
ODRŽAVANJE KLATNA U RADNOJ TA ČCI
SL. 6-14 EKSPERIMENTI NA KLATNU : PROMENJENA STRUKTURA PI DEJSTVA, REFERENCOM SE ZAHTEVA
ODRŽAVANJE KLATNA IZVAN RADNE TA ČKE
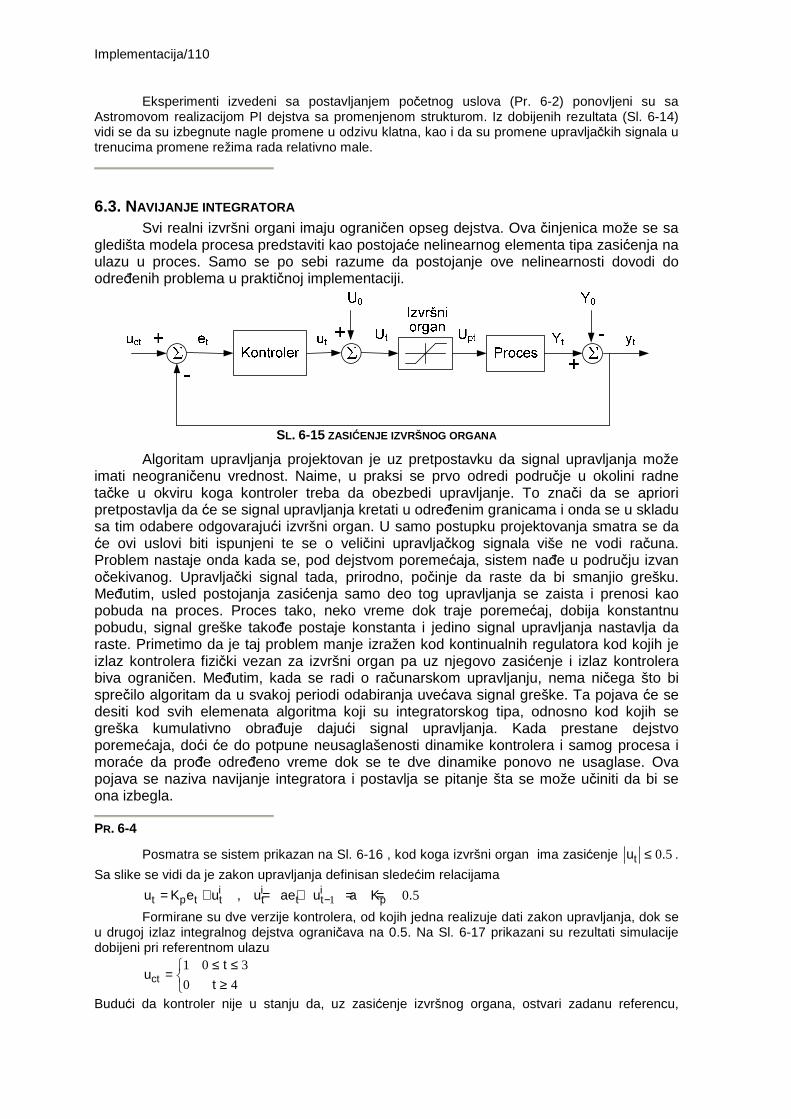
Implementacija/110
Eksperimenti izvedeni sa postavljanjem početnog uslova (Pr. 6-2) ponovljeni su sa Astromovom realizacijom PI dejstva sa promenjenom strukturom. Iz dobijenih rezultata (Sl. 6-14) vidi se da su izbegnute nagle promene u odzivu klatna, kao i da su promene upravljačkih signala u trenucima promene režima rada relativno male.
6.3. NAVIJANJE INTEGRATORA Svi realni izvršni organi imaju ograničen opseg dejstva. Ova činjenica može se sa
gledišta modela procesa predstaviti kao postojaće nelinearnog elementa tipa zasićenja na ulazu u proces. Samo se po sebi razume da postojanje ove nelinearnosti dovodi do određenih problema u praktičnoj implementaciji.
SL. 6-15 ZASIĆENJE IZVRŠNOG ORGANA
Algoritam upravljanja projektovan je uz pretpostavku da signal upravljanja može imati neograničenu vrednost. Naime, u praksi se prvo odredi područje u okolini radne tačke u okviru koga kontroler treba da obezbedi upravljanje. To znači da se apriori pretpostavlja da će se signal upravljanja kretati u određenim granicama i onda se u skladu sa tim odabere odgovarajući izvršni organ. U samo postupku projektovanja smatra se da će ovi uslovi biti ispunjeni te se o veličini upravljačkog signala više ne vodi računa. Problem nastaje onda kada se, pod dejstvom poremećaja, sistem nađe u području izvan očekivanog. Upravljački signal tada, prirodno, počinje da raste da bi smanjio grešku. Međutim, usled postojanja zasićenja samo deo tog upravljanja se zaista i prenosi kao pobuda na proces. Proces tako, neko vreme dok traje poremećaj, dobija konstantnu pobudu, signal greške takođe postaje konstanta i jedino signal upravljanja nastavlja da raste. Primetimo da je taj problem manje izražen kod kontinualnih regulatora kod kojih je izlaz kontrolera fizički vezan za izvršni organ pa uz njegovo zasićenje i izlaz kontrolera biva ograničen. Međutim, kada se radi o računarskom upravljanju, nema ničega što bi sprečilo algoritam da u svakoj periodi odabiranja uvećava signal greške. Ta pojava će se desiti kod svih elemenata algoritma koji su integratorskog tipa, odnosno kod kojih se greška kumulativno obrađuje dajući signal upravljanja. Kada prestane dejstvo poremećaja, doći će do potpune neusaglašenosti dinamike kontrolera i samog procesa i moraće da prođe određeno vreme dok se te dve dinamike ponovo ne usaglase. Ova pojava se naziva navijanje integratora i postavlja se pitanje šta se može učiniti da bi se ona izbegla.
PR. 6-4
Posmatra se sistem prikazan na Sl. 6-16 , kod koga izvršni organ ima zasićenje 0 5tu .≤ .
Sa slike se vidi da je zakon upravljanja definisan sledećim relacijama
1 0 5i i it p t t t t t pu K e u , u ae u a K .−= + = + = =
Formirane su dve verzije kontrolera, od kojih jedna realizuje dati zakon upravljanja, dok se u drugoj izlaz integralnog dejstva ograničava na 0.5. Na Sl. 6-17 prikazani su rezultati simulacije dobijeni pri referentnom ulazu
1 0 3
0 4ctt
ut
≤ ≤= ≥
Budući da kontroler nije u stanju da, uz zasićenje izvršnog organa, ostvari zadanu referencu,
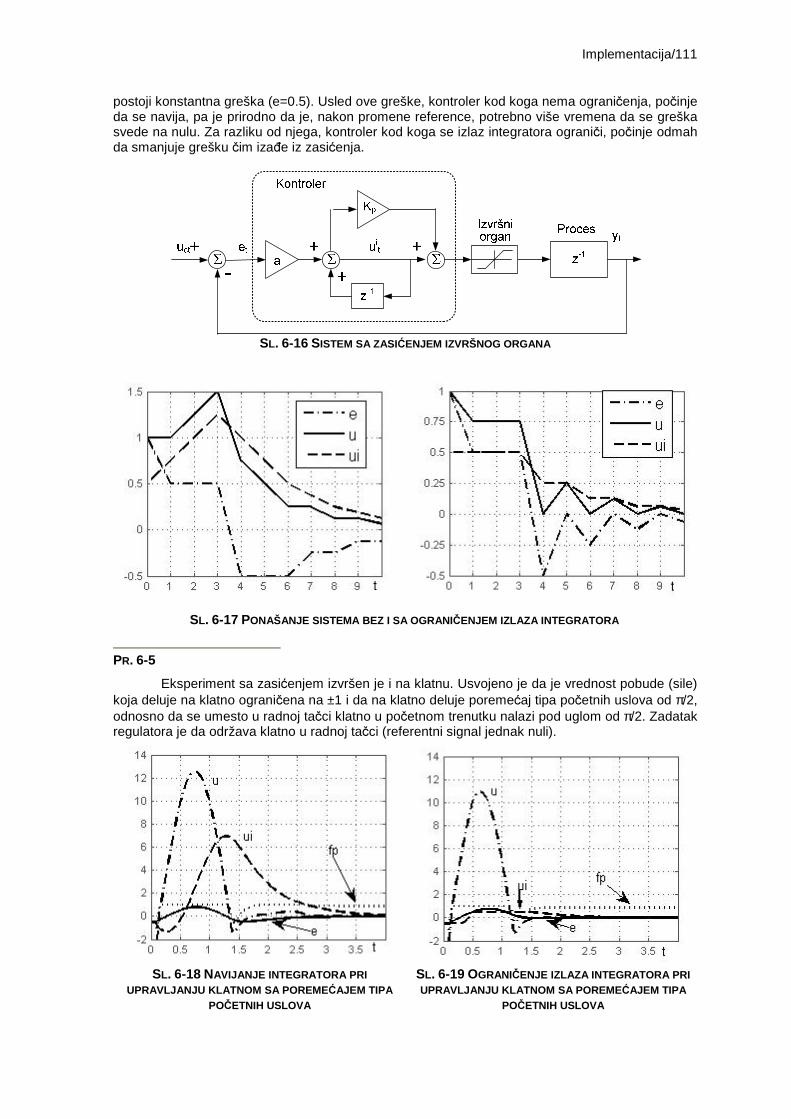
Implementacija/111
postoji konstantna greška (e=0.5). Usled ove greške, kontroler kod koga nema ograničenja, počinje da se navija, pa je prirodno da je, nakon promene reference, potrebno više vremena da se greška svede na nulu. Za razliku od njega, kontroler kod koga se izlaz integratora ograniči, počinje odmah da smanjuje grešku čim izađe iz zasićenja.
SL. 6-16 SISTEM SA ZASIĆENJEM IZVRŠNOG ORGANA
PR. 6-5
Eksperiment sa zasićenjem izvršen je i na klatnu. Usvojeno je da je vrednost pobude (sile) koja deluje na klatno ograničena na ±1 i da na klatno deluje poremećaj tipa početnih uslova od π/2, odnosno da se umesto u radnoj tačci klatno u početnom trenutku nalazi pod uglom od π/2. Zadatak regulatora je da održava klatno u radnoj tačci (referentni signal jednak nuli).
SL. 6-18 NAVIJANJE INTEGRATORA PRI
UPRAVLJANJU KLATNOM SA POREME ĆAJEM TIPA POČETNIH USLOVA
SL. 6-19 OGRANIČENJE IZLAZA INTEGRATORA PRI UPRAVLJANJU KLATNOM SA POREME ĆAJEM TIPA
POČETNIH USLOVA
SL. 6-17 PONAŠANJE SISTEMA BEZ I SA OGRANI ČENJEM IZLAZA INTEGRATORA
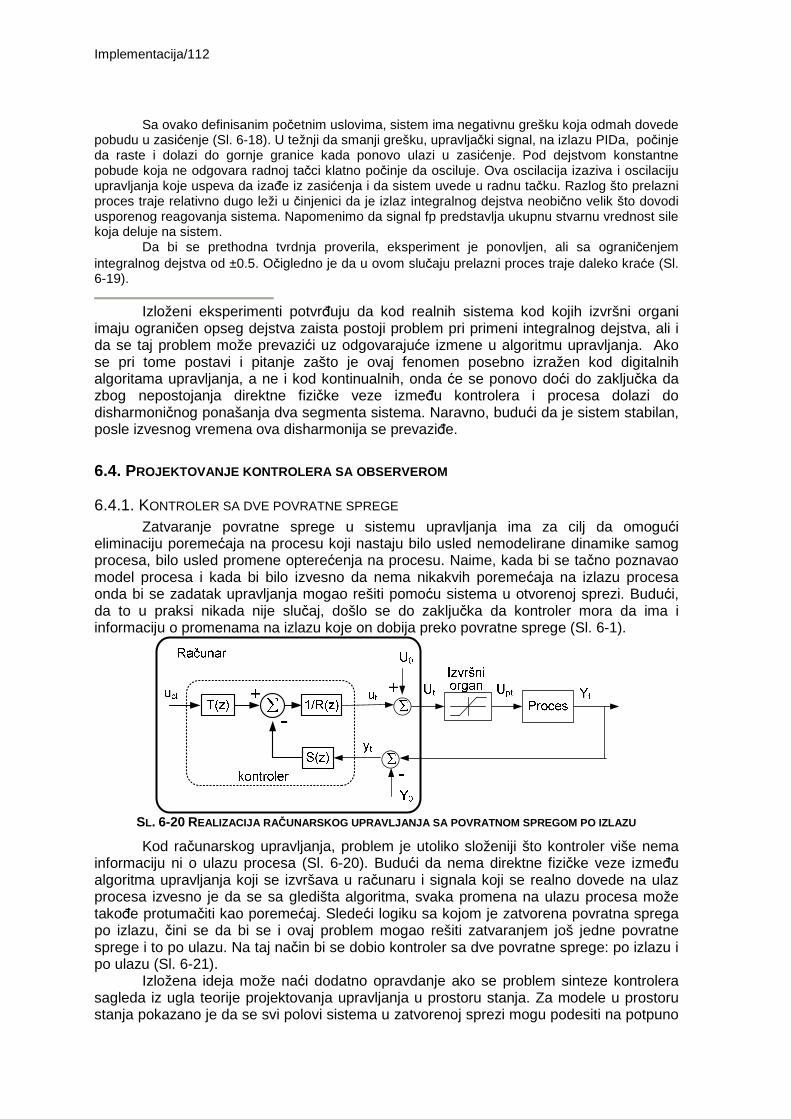
Implementacija/112
Sa ovako definisanim početnim uslovima, sistem ima negativnu grešku koja odmah dovede pobudu u zasićenje (Sl. 6-18). U težnji da smanji grešku, upravljački signal, na izlazu PIDa, počinje da raste i dolazi do gornje granice kada ponovo ulazi u zasićenje. Pod dejstvom konstantne pobude koja ne odgovara radnoj tačci klatno počinje da osciluje. Ova oscilacija izaziva i oscilaciju upravljanja koje uspeva da izađe iz zasićenja i da sistem uvede u radnu tačku. Razlog što prelazni proces traje relativno dugo leži u činjenici da je izlaz integralnog dejstva neobično velik što dovodi usporenog reagovanja sistema. Napomenimo da signal fp predstavlja ukupnu stvarnu vrednost sile koja deluje na sistem.
Da bi se prethodna tvrdnja proverila, eksperiment je ponovljen, ali sa ograničenjem integralnog dejstva od ±0.5. Očigledno je da u ovom slučaju prelazni proces traje daleko kraće (Sl. 6-19).
Izloženi eksperimenti potvrđuju da kod realnih sistema kod kojih izvršni organi
imaju ograničen opseg dejstva zaista postoji problem pri primeni integralnog dejstva, ali i da se taj problem može prevazići uz odgovarajuće izmene u algoritmu upravljanja. Ako se pri tome postavi i pitanje zašto je ovaj fenomen posebno izražen kod digitalnih algoritama upravljanja, a ne i kod kontinualnih, onda će se ponovo doći do zaključka da zbog nepostojanja direktne fizičke veze između kontrolera i procesa dolazi do disharmoničnog ponašanja dva segmenta sistema. Naravno, budući da je sistem stabilan, posle izvesnog vremena ova disharmonija se prevaziđe.
6.4. PROJEKTOVANJE KONTROLERA SA OBSERVEROM
6.4.1. KONTROLER SA DVE POVRATNE SPREGE Zatvaranje povratne sprege u sistemu upravljanja ima za cilj da omogući
eliminaciju poremećaja na procesu koji nastaju bilo usled nemodelirane dinamike samog procesa, bilo usled promene opterećenja na procesu. Naime, kada bi se tačno poznavao model procesa i kada bi bilo izvesno da nema nikakvih poremećaja na izlazu procesa onda bi se zadatak upravljanja mogao rešiti pomoću sistema u otvorenoj sprezi. Budući, da to u praksi nikada nije slučaj, došlo se do zaključka da kontroler mora da ima i informaciju o promenama na izlazu koje on dobija preko povratne sprege (Sl. 6-1).
SL. 6-20 REALIZACIJA RA ČUNARSKOG UPRAVLJANJA SA POVRATNOM SPREGOM PO IZLAZU
Kod računarskog upravljanja, problem je utoliko složeniji što kontroler više nema informaciju ni o ulazu procesa (Sl. 6-20). Budući da nema direktne fizičke veze između algoritma upravljanja koji se izvršava u računaru i signala koji se realno dovede na ulaz procesa izvesno je da se sa gledišta algoritma, svaka promena na ulazu procesa može takođe protumačiti kao poremećaj. Sledeći logiku sa kojom je zatvorena povratna sprega po izlazu, čini se da bi se i ovaj problem mogao rešiti zatvaranjem još jedne povratne sprege i to po ulazu. Na taj način bi se dobio kontroler sa dve povratne sprege: po izlazu i po ulazu (Sl. 6-21).
Izložena ideja može naći dodatno opravdanje ako se problem sinteze kontrolera sagleda iz ugla teorije projektovanja upravljanja u prostoru stanja. Za modele u prostoru stanja pokazano je da se svi polovi sistema u zatvorenoj sprezi mogu podesiti na potpuno
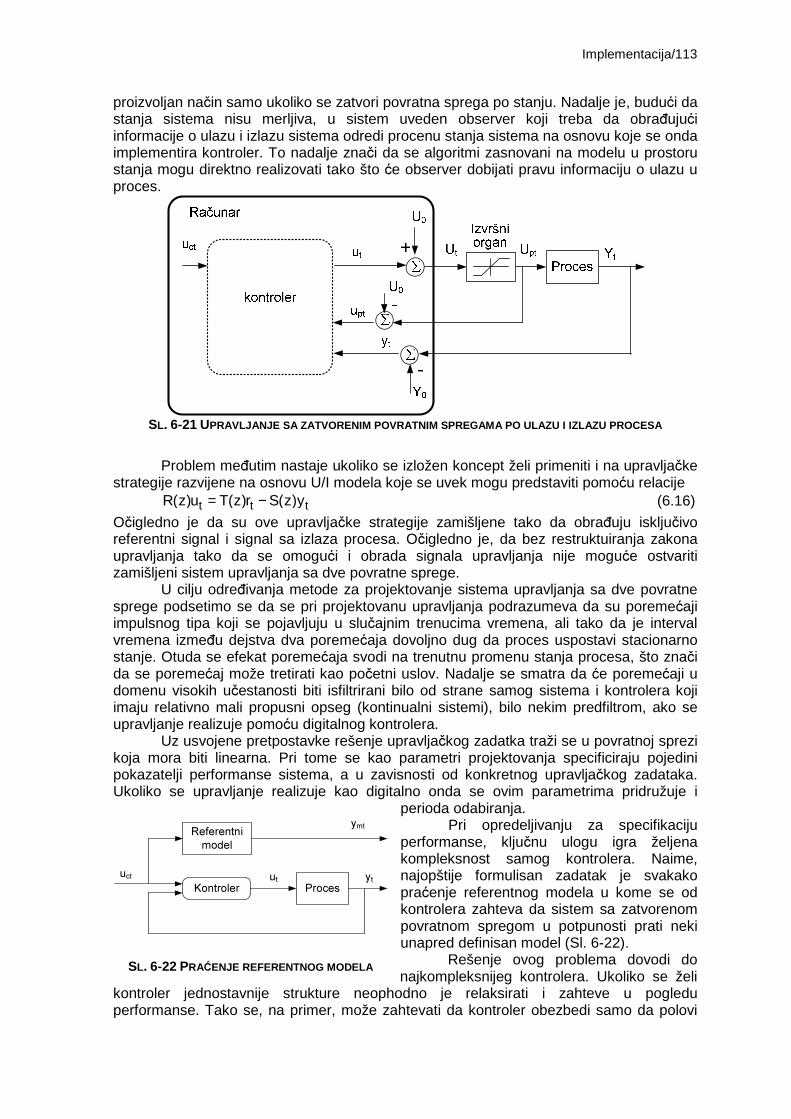
Implementacija/113
proizvoljan način samo ukoliko se zatvori povratna sprega po stanju. Nadalje je, budući da stanja sistema nisu merljiva, u sistem uveden observer koji treba da obrađujući informacije o ulazu i izlazu sistema odredi procenu stanja sistema na osnovu koje se onda implementira kontroler. To nadalje znači da se algoritmi zasnovani na modelu u prostoru stanja mogu direktno realizovati tako što će observer dobijati pravu informaciju o ulazu u proces.
SL. 6-21 UPRAVLJANJE SA ZATVORENIM POVRATNIM SPREGAMA PO ULAZ U I IZLAZU PROCESA
Problem međutim nastaje ukoliko se izložen koncept želi primeniti i na upravljačke
strategije razvijene na osnovu U/I modela koje se uvek mogu predstaviti pomoću relacije
t t tR(z)u T(z)r S(z)y= − (6.16)
Očigledno je da su ove upravljačke strategije zamišljene tako da obrađuju isključivo referentni signal i signal sa izlaza procesa. Očigledno je, da bez restruktuiranja zakona upravljanja tako da se omogući i obrada signala upravljanja nije moguće ostvariti zamišljeni sistem upravljanja sa dve povratne sprege.
U cilju određivanja metode za projektovanje sistema upravljanja sa dve povratne sprege podsetimo se da se pri projektovanu upravljanja podrazumeva da su poremećaji impulsnog tipa koji se pojavljuju u slučajnim trenucima vremena, ali tako da je interval vremena između dejstva dva poremećaja dovoljno dug da proces uspostavi stacionarno stanje. Otuda se efekat poremećaja svodi na trenutnu promenu stanja procesa, što znači da se poremećaj može tretirati kao početni uslov. Nadalje se smatra da će poremećaji u domenu visokih učestanosti biti isfiltrirani bilo od strane samog sistema i kontrolera koji imaju relativno mali propusni opseg (kontinualni sistemi), bilo nekim predfiltrom, ako se upravljanje realizuje pomoću digitalnog kontrolera.
Uz usvojene pretpostavke rešenje upravljačkog zadatka traži se u povratnoj sprezi koja mora biti linearna. Pri tome se kao parametri projektovanja specificiraju pojedini pokazatelji performanse sistema, a u zavisnosti od konkretnog upravljačkog zadataka. Ukoliko se upravljanje realizuje kao digitalno onda se ovim parametrima pridružuje i
perioda odabiranja. Pri opredeljivanju za specifikaciju
performanse, ključnu ulogu igra željena kompleksnost samog kontrolera. Naime, najopštije formulisan zadatak je svakako praćenje referentnog modela u kome se od kontrolera zahteva da sistem sa zatvorenom povratnom spregom u potpunosti prati neki unapred definisan model (Sl. 6-22).
Rešenje ovog problema dovodi do najkompleksnijeg kontrolera. Ukoliko se želi
kontroler jednostavnije strukture neophodno je relaksirati i zahteve u pogledu performanse. Tako se, na primer, može zahtevati da kontroler obezbedi samo da polovi
SL. 6-22 PRAĆENJE REFERENTNOG MODELA
Kontroler Proces
Referentni
model
ytutuct
ymt
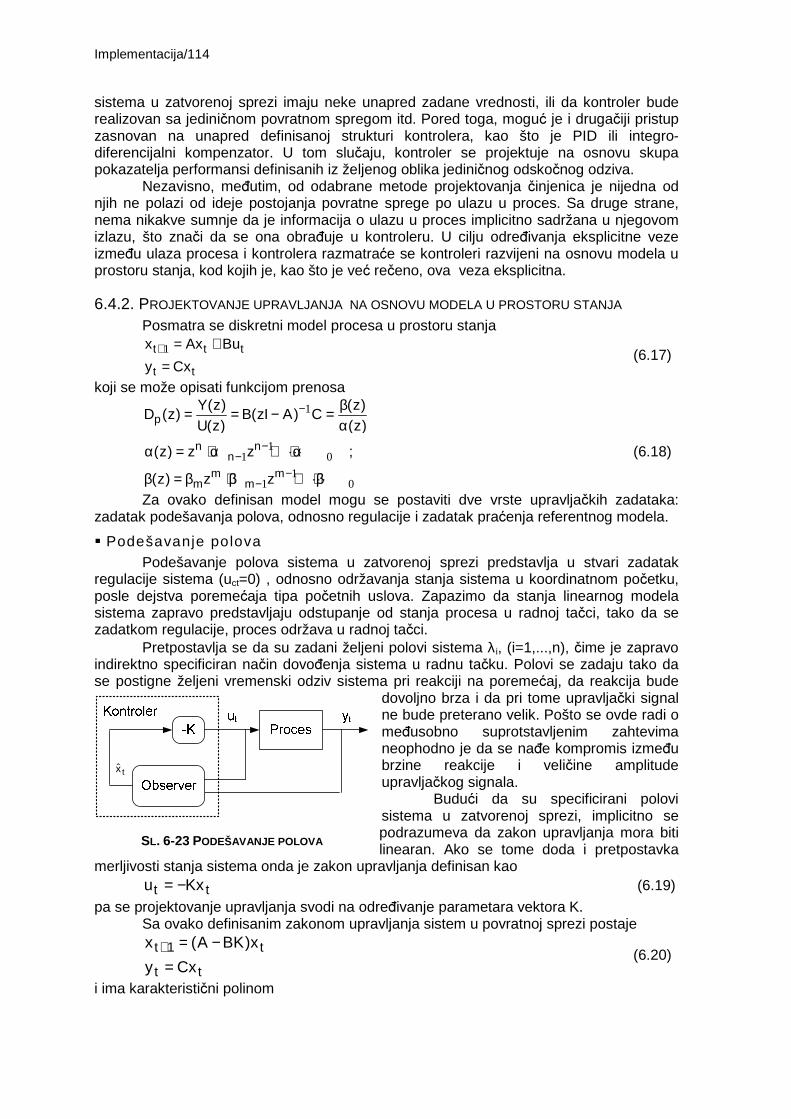
Implementacija/114
sistema u zatvorenoj sprezi imaju neke unapred zadane vrednosti, ili da kontroler bude realizovan sa jediničnom povratnom spregom itd. Pored toga, moguć je i drugačiji pristup zasnovan na unapred definisanoj strukturi kontrolera, kao što je PID ili integro-diferencijalni kompenzator. U tom slučaju, kontroler se projektuje na osnovu skupa pokazatelja performansi definisanih iz željenog oblika jediničnog odskočnog odziva.
Nezavisno, međutim, od odabrane metode projektovanja činjenica je nijedna od njih ne polazi od ideje postojanja povratne sprege po ulazu u proces. Sa druge strane, nema nikakve sumnje da je informacija o ulazu u proces implicitno sadržana u njegovom izlazu, što znači da se ona obrađuje u kontroleru. U cilju određivanja eksplicitne veze između ulaza procesa i kontrolera razmatraće se kontroleri razvijeni na osnovu modela u prostoru stanja, kod kojih je, kao što je već rečeno, ova veza eksplicitna.
6.4.2. PROJEKTOVANJE UPRAVLJANJA NA OSNOVU MODELA U PROSTORU STANJA Posmatra se diskretni model procesa u prostoru stanja
1t t t
t t
x Ax Bu
y Cx+ = +=
(6.17)
koji se može opisati funkcijom prenosa 1
11 0
11 0
p
n nn
m mm m
Y(z) (z)D (z) B(zI A) C
U(z) (z)
(z) z z ;
(z) z z
−
−−
−−
β= = − =α
α = + α + + α
β = β + β + + β
L
L
(6.18)
Za ovako definisan model mogu se postaviti dve vrste upravljačkih zadataka: zadatak podešavanja polova, odnosno regulacije i zadatak praćenja referentnog modela.
Podešavanje polova Podešavanje polova sistema u zatvorenoj sprezi predstavlja u stvari zadatak
regulacije sistema (uct=0) , odnosno održavanja stanja sistema u koordinatnom početku, posle dejstva poremećaja tipa početnih uslova. Zapazimo da stanja linearnog modela sistema zapravo predstavljaju odstupanje od stanja procesa u radnoj tačci, tako da se zadatkom regulacije, proces održava u radnoj tačci.
Pretpostavlja se da su zadani željeni polovi sistema λi, (i=1,...,n), čime je zapravo indirektno specificiran način dovođenja sistema u radnu tačku. Polovi se zadaju tako da se postigne željeni vremenski odziv sistema pri reakciji na poremećaj, da reakcija bude
dovoljno brza i da pri tome upravljački signal ne bude preterano velik. Pošto se ovde radi o međusobno suprotstavljenim zahtevima neophodno je da se nađe kompromis između brzine reakcije i veličine amplitude upravljačkog signala.
Budući da su specificirani polovi sistema u zatvorenoj sprezi, implicitno se podrazumeva da zakon upravljanja mora biti linearan. Ako se tome doda i pretpostavka
merljivosti stanja sistema onda je zakon upravljanja definisan kao
tt Kxu −= (6.19)
pa se projektovanje upravljanja svodi na određivanje parametara vektora K. Sa ovako definisanim zakonom upravljanja sistem u povratnoj sprezi postaje
tt
t1t
Cxy
x)BKA(x
=−=+ (6.20)
i ima karakteristični polinom
SL. 6-23 PODEŠAVANJE POLOVA
tx
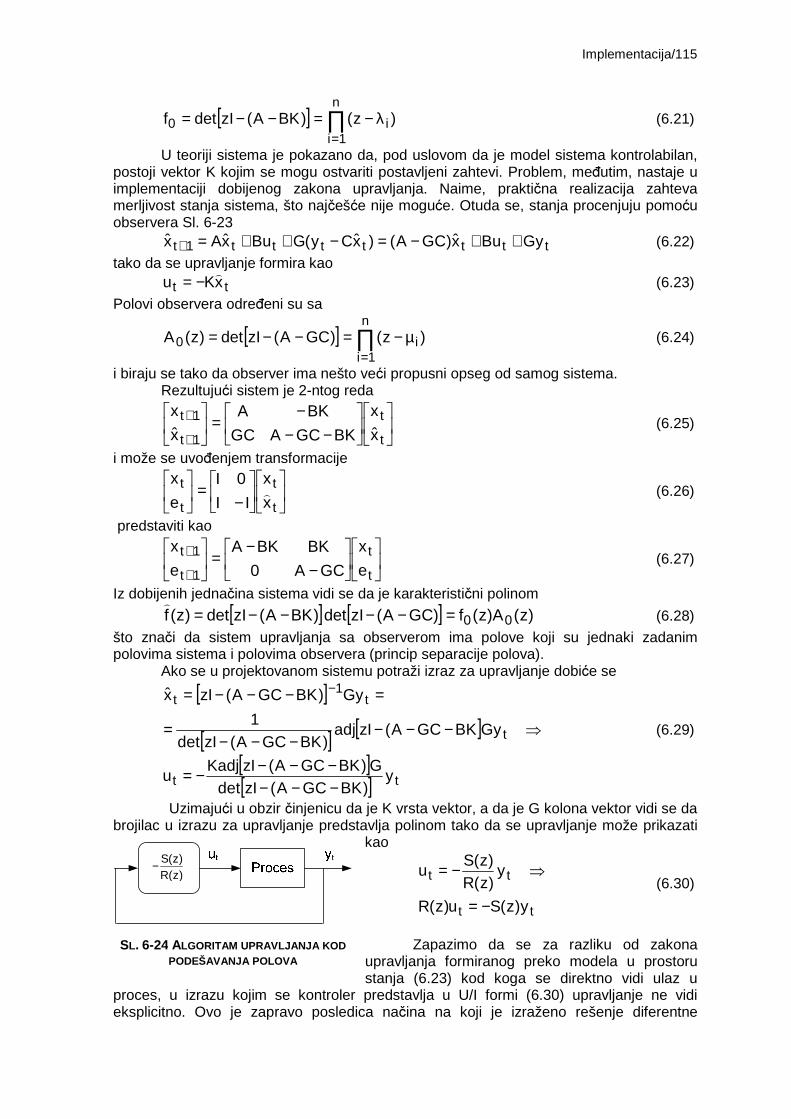
Implementacija/115
[ ] ∏=
λ−=−−=n
1ii0 )z()BKA(zIdetf (6.21)
U teoriji sistema je pokazano da, pod uslovom da je model sistema kontrolabilan, postoji vektor K kojim se mogu ostvariti postavljeni zahtevi. Problem, međutim, nastaje u implementaciji dobijenog zakona upravljanja. Naime, praktična realizacija zahteva merljivost stanja sistema, što najčešće nije moguće. Otuda se, stanja procenjuju pomoću observera Sl. 6-23
ttttttt1t GyBux)GCA()xCy(GBuxAx ++−=−++=+ (6.22)
tako da se upravljanje formira kao
tt xKu)
−= (6.23)
Polovi observera određeni su sa
[ ] ∏=
µ−=−−=n
1ii0 )z()GCA(zIdet)z(A (6.24)
i biraju se tako da observer ima nešto veći propusni opseg od samog sistema. Rezultujući sistem je 2-ntog reda
−−−
=
+
+
t
t
1t
1t
x
x
BKGCAGC
BKA
x
x (6.25)
i može se uvođenjem transformacije
−=
t
t
t
t
x
x
II
0I
e
x)
(6.26)
predstaviti kao
−−
=
+
+
t
t
1t
1t
e
x
GCA0
BKBKA
e
x (6.27)
Iz dobijenih jednačina sistema vidi se da je karakteristični polinom
[ ] [ ] )z(A)z(f)GCA(zIdet)BKA(zIdet)z(f 00=−−−−=)
(6.28)
što znači da sistem upravljanja sa observerom ima polove koji su jednaki zadanim polovima sistema i polovima observera (princip separacije polova).
Ako se u projektovanom sistemu potraži izraz za upravljanje dobiće se
[ ]
[ ] [ ][ ][ ] tt
t
t1
t
y)BKGCA(zIdetG)BKGCA(zIKadj
u
GyBKGCA(zIadj)BKGCA(zIdet
1
Gy)BKGCA(zIx
−−−−−−−=
⇒−−−−−−
=
=−−−= −
(6.29)
Uzimajući u obzir činjenicu da je K vrsta vektor, a da je G kolona vektor vidi se da brojilac u izrazu za upravljanje predstavlja polinom tako da se upravljanje može prikazati
kao
tt
tt
y)z(Su)z(R
y)z(R)z(S
u
−=
⇒−= (6.30)
Zapazimo da se za razliku od zakona
upravljanja formiranog preko modela u prostoru stanja (6.23) kod koga se direktno vidi ulaz u
proces, u izrazu kojim se kontroler predstavlja u U/I formi (6.30) upravljanje ne vidi eksplicitno. Ovo je zapravo posledica načina na koji je izraženo rešenje diferentne
SL. 6-24 ALGORITAM UPRAVLJANJA KOD PODEŠAVANJA POLOVA
S(z)R(z)
−
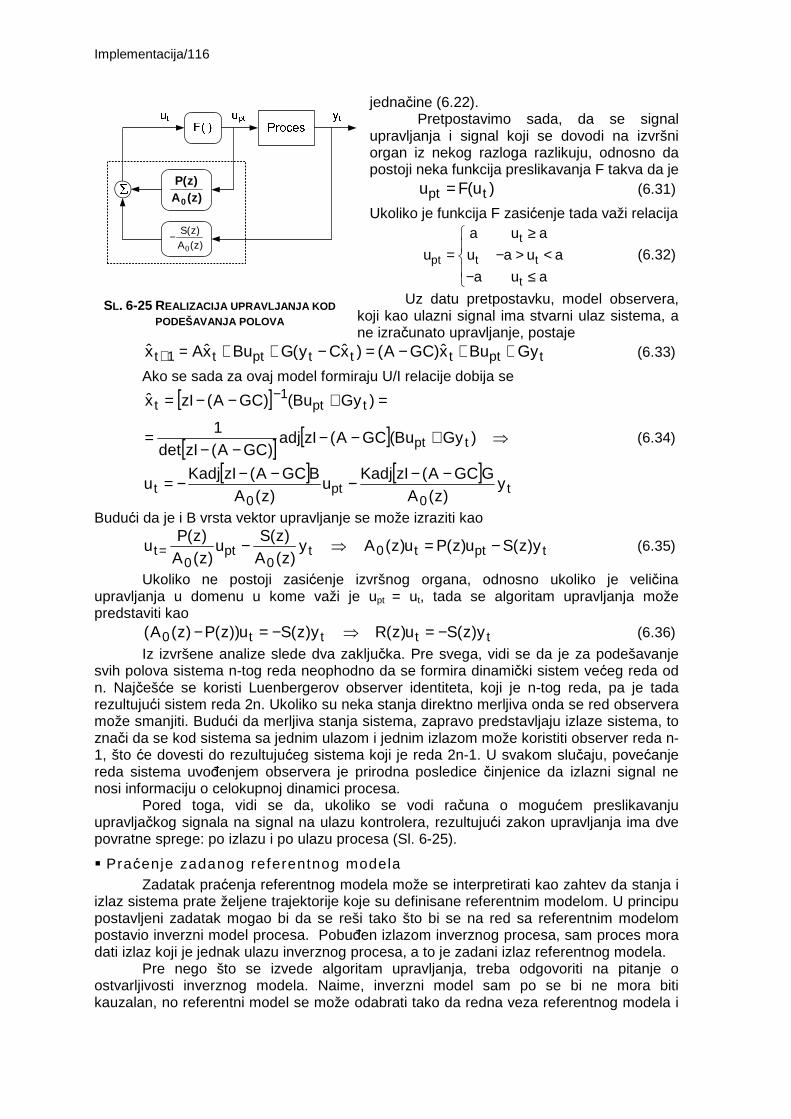
Implementacija/116
jednačine (6.22). Pretpostavimo sada, da se signal
upravljanja i signal koji se dovodi na izvršni organ iz nekog razloga razlikuju, odnosno da postoji neka funkcija preslikavanja F takva da je
)u(Fu tpt = (6.31)
Ukoliko je funkcija F zasićenje tada važi relacija
t
pt t t
t
a u a
u u a u a
a u a
≥= − > <− ≤
(6.32)
Uz datu pretpostavku, model observera, koji kao ulazni signal ima stvarni ulaz sistema, a ne izračunato upravljanje, postaje
tpttttptt1t GyBux)GCA()xCy(GBuxAx ++−=−++=+ (6.33)
Ako se sada za ovaj model formiraju U/I relacije dobija se
[ ]
[ ] [ ][ ] [ ]
t0
pt0
t
tpt
tpt1
t
y)z(A
GGCA(zIKadju
)z(ABGCA(zIKadj
u
)GyBu(GCA(zIadj)GCA(zIdet
1
)GyBu()GCA(zIx
−−−−−−=
⇒+−−−−
=
=+−−= −
(6.34)
Budući da je i B vrsta vektor upravljanje se može izraziti kao
tptt0t0
pt0
t y)z(Su)z(Pu)z(Ay)z(A
)z(Su
)z(A)z(P
u −=⇒−= (6.35)
Ukoliko ne postoji zasićenje izvršnog organa, odnosno ukoliko je veličina upravljanja u domenu u kome važi je upt = ut, tada se algoritam upravljanja može predstaviti kao
tttt0 y)z(Su)z(Ry)z(Su))z(P)z(A( −=⇒−=− (6.36)
Iz izvršene analize slede dva zaključka. Pre svega, vidi se da je za podešavanje svih polova sistema n-tog reda neophodno da se formira dinamički sistem većeg reda od n. Najčešće se koristi Luenbergerov observer identiteta, koji je n-tog reda, pa je tada rezultujući sistem reda 2n. Ukoliko su neka stanja direktno merljiva onda se red observera može smanjiti. Budući da merljiva stanja sistema, zapravo predstavljaju izlaze sistema, to znači da se kod sistema sa jednim ulazom i jednim izlazom može koristiti observer reda n-1, što će dovesti do rezultujućeg sistema koji je reda 2n-1. U svakom slučaju, povećanje reda sistema uvođenjem observera je prirodna posledice činjenice da izlazni signal ne nosi informaciju o celokupnoj dinamici procesa.
Pored toga, vidi se da, ukoliko se vodi računa o mogućem preslikavanju upravljačkog signala na signal na ulazu kontrolera, rezultujući zakon upravljanja ima dve povratne sprege: po izlazu i po ulazu procesa (Sl. 6-25).
Praćenje zadanog referentnog modela Zadatak praćenja referentnog modela može se interpretirati kao zahtev da stanja i
izlaz sistema prate željene trajektorije koje su definisane referentnim modelom. U principu postavljeni zadatak mogao bi da se reši tako što bi se na red sa referentnim modelom postavio inverzni model procesa. Pobuđen izlazom inverznog procesa, sam proces mora dati izlaz koji je jednak ulazu inverznog procesa, a to je zadani izlaz referentnog modela.
Pre nego što se izvede algoritam upravljanja, treba odgovoriti na pitanje o ostvarljivosti inverznog modela. Naime, inverzni model sam po se bi ne mora biti kauzalan, no referentni model se može odabrati tako da redna veza referentnog modela i
SL. 6-25 REALIZACIJA UPRAVLJANJA KOD PODEŠAVANJA POLOVA
0
S(z)A (z)
−
)z(A)z(P
0
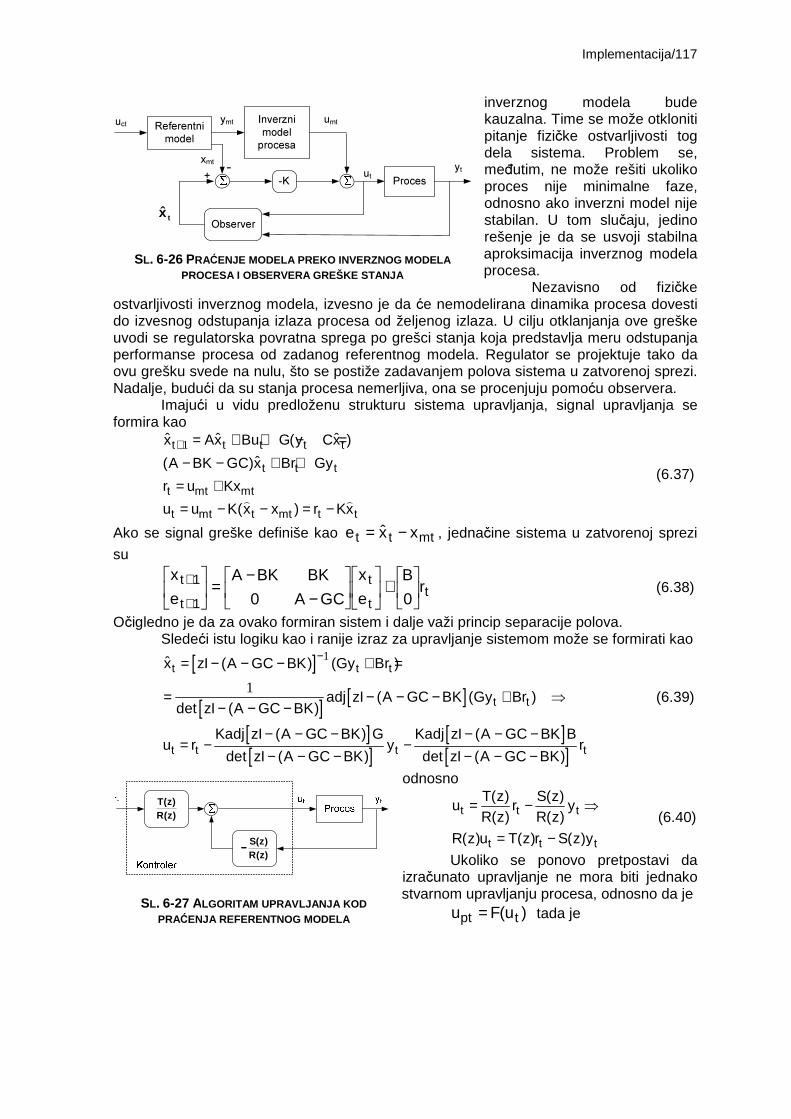
Implementacija/117
inverznog modela bude kauzalna. Time se može otkloniti pitanje fizičke ostvarljivosti tog dela sistema. Problem se, međutim, ne može rešiti ukoliko proces nije minimalne faze, odnosno ako inverzni model nije stabilan. U tom slučaju, jedino rešenje je da se usvoji stabilna aproksimacija inverznog modela procesa.
Nezavisno od fizičke ostvarljivosti inverznog modela, izvesno je da će nemodelirana dinamika procesa dovesti do izvesnog odstupanja izlaza procesa od željenog izlaza. U cilju otklanjanja ove greške uvodi se regulatorska povratna sprega po grešci stanja koja predstavlja meru odstupanja performanse procesa od zadanog referentnog modela. Regulator se projektuje tako da ovu grešku svede na nulu, što se postiže zadavanjem polova sistema u zatvorenoj sprezi. Nadalje, budući da su stanja procesa nemerljiva, ona se procenjuju pomoću observera.
Imajući u vidu predloženu strukturu sistema upravljanja, signal upravljanja se formira kao
1t t t t t
t t t
t mt mt
t mt t mt t t
ˆ ˆ ˆx Ax Bu G(y Cx )
ˆ(A BK GC)x Br Gy
r u Kx
u u K(x x ) r Kx
+ = + + − =− − + +
= += − − = −
) )
(6.37)
Ako se signal greške definiše kao mttt xxe −= , jednačine sistema u zatvorenoj sprezi
su
tt
t
1t
1t r0
B
e
x
GCA0
BKBKA
e
x
+
−−
=
+
+ (6.38)
Očigledno je da za ovako formiran sistem i dalje važi princip separacije polova. Sledeći istu logiku kao i ranije izraz za upravljanje sistemom može se formirati kao
[ ]
[ ] [ ]
[ ][ ]
[ ][ ]
1
1t t t
t t
t t t t
x zI (A GC BK) (Gy Br )
adj zI (A GC BK (Gy Br )det zI (A GC BK)
Kadj zI (A GC BK) G Kadj zI (A GC BK Bu r y r
det zI (A GC BK) det zI (A GC BK)
−= − − − + =
= − − − + ⇒
− − −
− − − − − −= − −
− − − − − −
(6.39)
odnosno
t t t
t t t
T(z) S(z)u r y
R(z) R(z)
R(z)u T(z)r S(z)y
= − ⇒
= − (6.40)
Ukoliko se ponovo pretpostavi da izračunato upravljanje ne mora biti jednako stvarnom upravljanju procesa, odnosno da je
)u(Fu tpt = tada je
SL. 6-26 PRAĆENJE MODELA PREKO INVERZNOG MODELA PROCESA I OBSERVERA GREŠKE STANJA
SL. 6-27 ALGORITAM UPRAVLJANJA KOD PRAĆENJA REFERENTNOG MODELA
-K Proces
Referentni
model
ytut
uctymt
+
Observer
Inverzni
model
procesa
umt
-
xmt
tx
)z(R)z(S−−−−
)z(R)z(T
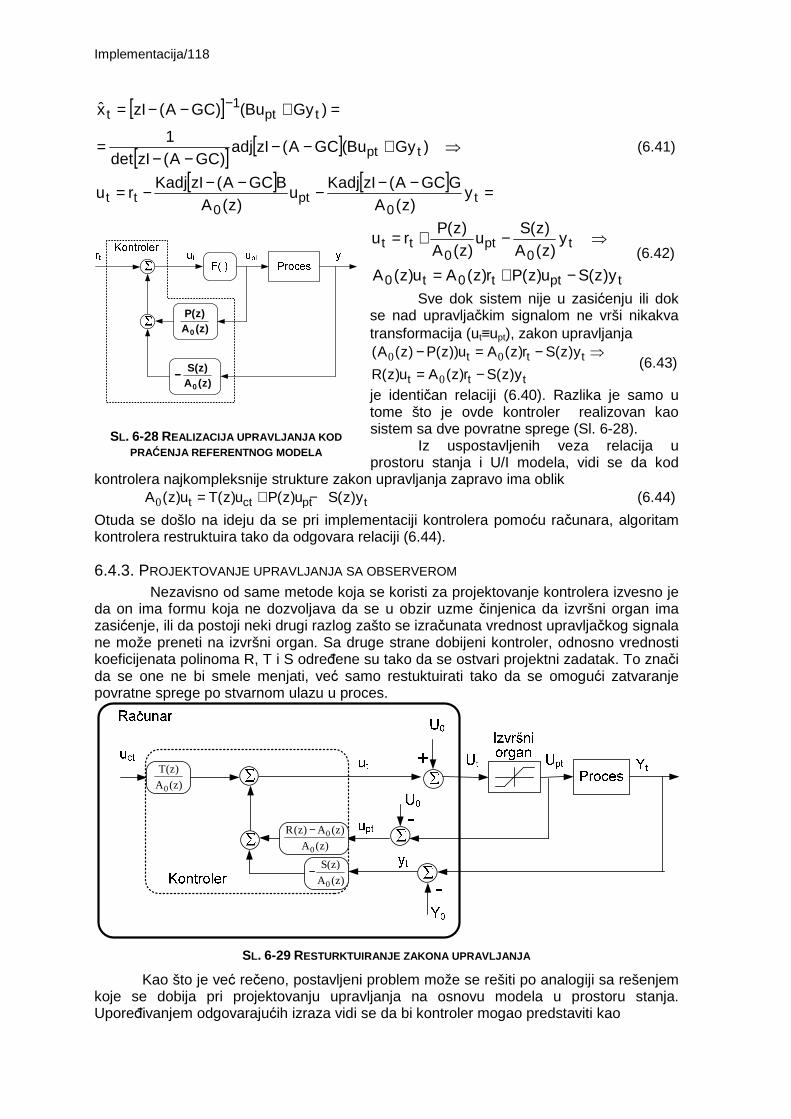
Implementacija/118
[ ]
[ ] [ ][ ] [ ] =−−−−−−=
⇒+−−−−
=
=+−−= −
t0
pt0
tt
tpt
tpt1
t
y)z(A
GGCA(zIKadju
)z(ABGCA(zIKadj
ru
)GyBu(GCA(zIadj)GCA(zIdet
1
)GyBu()GCA(zIx
(6.41)
tptt0t0
t0
pt0
tt
y)z(Su)z(Pr)z(Au)z(A
y)z(A
)z(Su
)z(A)z(P
ru
−+=
⇒−+= (6.42)
Sve dok sistem nije u zasićenju ili dok se nad upravljačkim signalom ne vrši nikakva transformacija (ut≡upt), zakon upravljanja
0 0
0
t t t
t t t
(A (z) P(z))u A (z)r S(z)y
R(z)u A (z)r S(z)y
− = − ⇒
= − (6.43)
je identičan relaciji (6.40). Razlika je samo u tome što je ovde kontroler realizovan kao sistem sa dve povratne sprege (Sl. 6-28).
Iz uspostavljenih veza relacija u prostoru stanja i U/I modela, vidi se da kod
kontrolera najkompleksnije strukture zakon upravljanja zapravo ima oblik
0 t ct pt tA (z)u T(z)u P(z)u S(z)y= + − (6.44)
Otuda se došlo na ideju da se pri implementaciji kontrolera pomoću računara, algoritam kontrolera restruktuira tako da odgovara relaciji (6.44).
6.4.3. PROJEKTOVANJE UPRAVLJANJA SA OBSERVEROM Nezavisno od same metode koja se koristi za projektovanje kontrolera izvesno je
da on ima formu koja ne dozvoljava da se u obzir uzme činjenica da izvršni organ ima zasićenje, ili da postoji neki drugi razlog zašto se izračunata vrednost upravljačkog signala ne može preneti na izvršni organ. Sa druge strane dobijeni kontroler, odnosno vrednosti koeficijenata polinoma R, T i S određene su tako da se ostvari projektni zadatak. To znači da se one ne bi smele menjati, već samo restuktuirati tako da se omogući zatvaranje povratne sprege po stvarnom ulazu u proces.
SL. 6-29 RESTURKTUIRANJE ZAKONA UPRAVLJANJA
Kao što je već rečeno, postavljeni problem može se rešiti po analogiji sa rešenjem koje se dobija pri projektovanju upravljanja na osnovu modela u prostoru stanja. Upoređivanjem odgovarajućih izraza vidi se da bi kontroler mogao predstaviti kao
0
S(z)
A (z)−
0
0
R(z) A (z)
A (z)
−
0
T(z)
A (z)
SL. 6-28 REALIZACIJA UPRAVLJANJA KOD PRAĆENJA REFERENTNOG MODELA
)z(A)z(S
0−−−−
)z(A)z(P
0
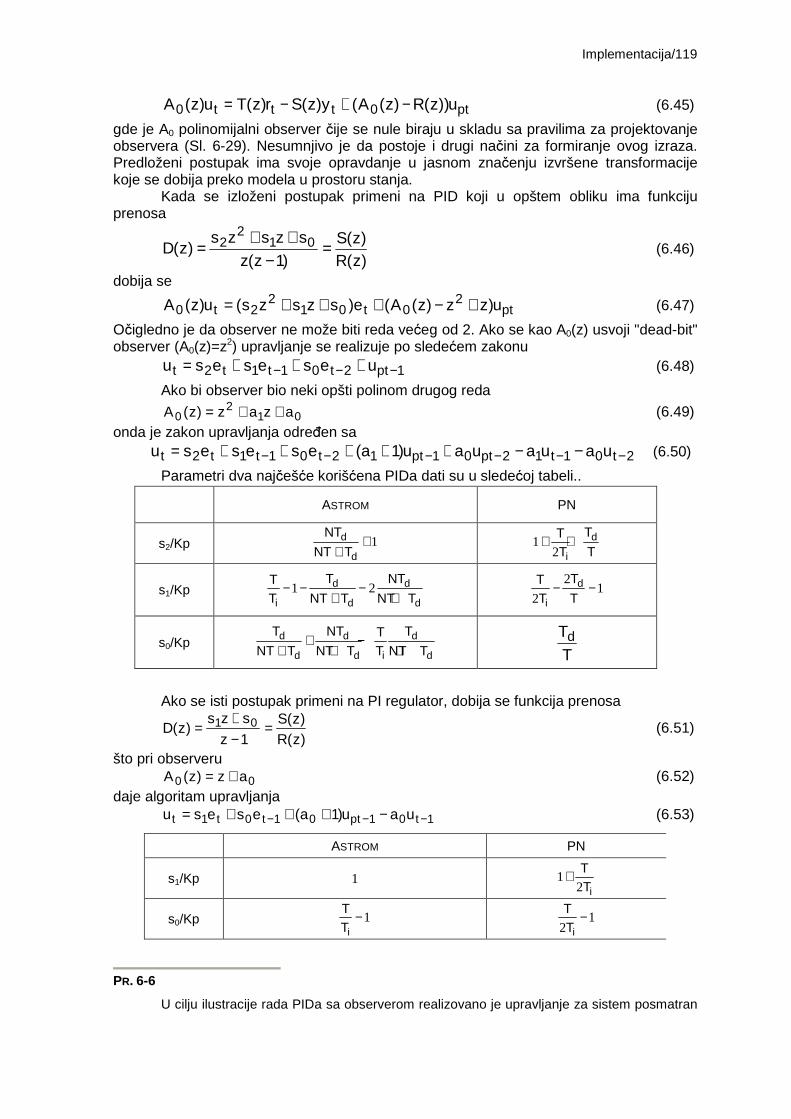
Implementacija/119
pt0ttt0 u))z(R)z(A(y)z(Sr)z(Tu)z(A −+−= (6.45)
gde je A0 polinomijalni observer čije se nule biraju u skladu sa pravilima za projektovanje observera (Sl. 6-29). Nesumnjivo je da postoje i drugi načini za formiranje ovog izraza. Predloženi postupak ima svoje opravdanje u jasnom značenju izvršene transformacije koje se dobija preko modela u prostoru stanja. Kada se izloženi postupak primeni na PID koji u opštem obliku ima funkciju prenosa
)z(R)z(S
)1z(z
szszs)z(D 01
22 =
−++
= (6.46)
dobija se
pt2
0t012
2t0 u)zz)z(A(e)szszs(u)z(A +−+++= (6.47)
Očigledno je da observer ne može biti reda većeg od 2. Ako se kao A0(z) usvoji "dead-bit" observer (A0(z)=z2) upravljanje se realizuje po sledećem zakonu
1pt2t01t1t2t uesesesu −−− +++= (6.48)
Ako bi observer bio neki opšti polinom drugog reda
012
0 azaz)z(A ++= (6.49) onda je zakon upravljanja određen sa
2t01t12pt01pt12t01t1t2t uauauau)1a(esesesu −−−−−− −−+++++= (6.50)
Parametri dva najčešće korišćena PIDa dati su u sledećoj tabeli..
Ako se isti postupak primeni na PI regulator, dobija se funkcija prenosa
)z(R)z(S
1z
szs)z(D 01 =
−+
= (6.51)
što pri observeru
00 az)z(A += (6.52) daje algoritam upravljanja
1t01pt01t0t1t uau)1a(esesu −−− −+++= (6.53)
PR. 6-6
U cilju ilustracije rada PIDa sa observerom realizovano je upravljanje za sistem posmatran
ASTROM PN
s2/Kp 1d
d
NT
NT T+
+ 1
2d
i
TTT T
+ +
s1/Kp 1 2d d
i d d
T NTTT NT T NT T
− − −+ +
2
12
d
i
TTT T
− −
s0/Kp d d d
d d i d
T NT TTNT T NT T T NT T
+ −+ + +
T
Td
ASTROM PN
s1/Kp 1 12 i
TT
+
s0/Kp 1i
TT
− 12 i
TT
−
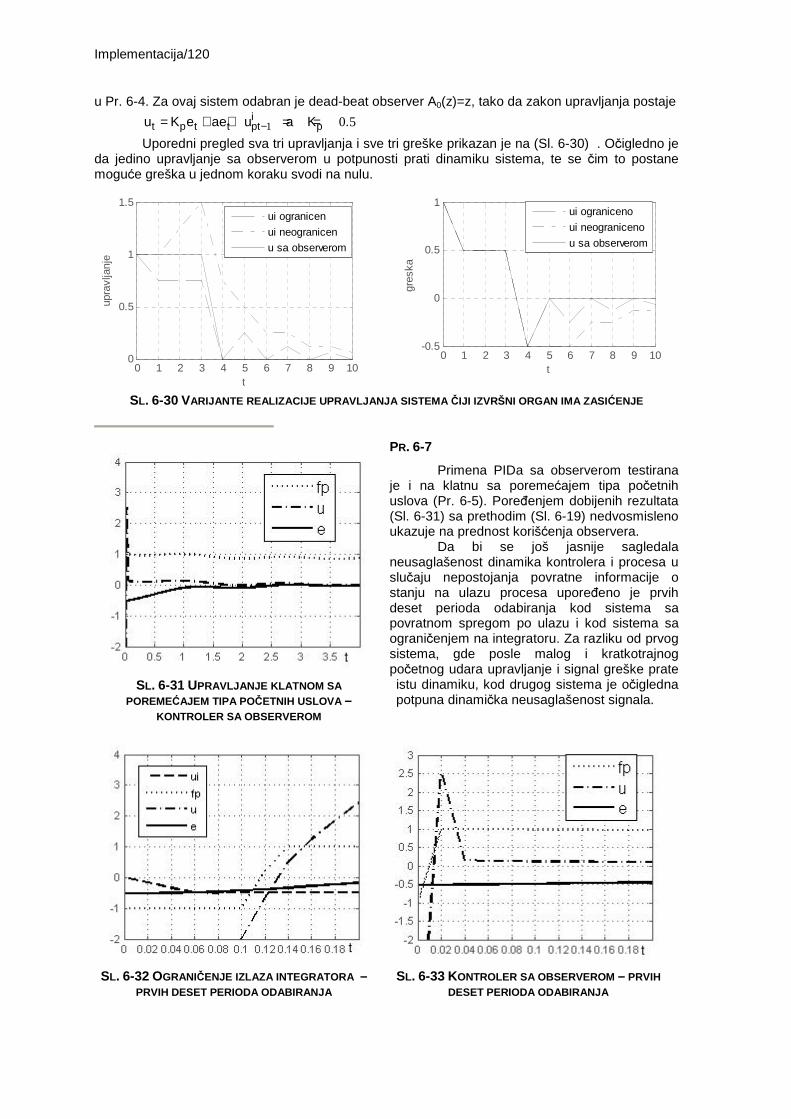
Implementacija/120
u Pr. 6-4. Za ovaj sistem odabran je dead-beat observer A0(z)=z, tako da zakon upravljanja postaje
1 0 5it p t t pt pu K e ae u a K .−= + + = =
Uporedni pregled sva tri upravljanja i sve tri greške prikazan je na (Sl. 6-30) . Očigledno je da jedino upravljanje sa observerom u potpunosti prati dinamiku sistema, te se čim to postane moguće greška u jednom koraku svodi na nulu.
SL. 6-30 VARIJANTE REALIZACIJE UPRAVLJANJA SISTEMA ČIJI IZVRŠNI ORGAN IMA ZASI ĆENJE
PR. 6-7
Primena PIDa sa observerom testirana je i na klatnu sa poremećajem tipa početnih uslova (Pr. 6-5). Poređenjem dobijenih rezultata (Sl. 6-31) sa prethodim (Sl. 6-19) nedvosmisleno ukazuje na prednost korišćenja observera.
Da bi se još jasnije sagledala neusaglašenost dinamika kontrolera i procesa u slučaju nepostojanja povratne informacije o stanju na ulazu procesa upoređeno je prvih deset perioda odabiranja kod sistema sa povratnom spregom po ulazu i kod sistema sa ograničenjem na integratoru. Za razliku od prvog sistema, gde posle malog i kratkotrajnog početnog udara upravljanje i signal greške prate istu dinamiku, kod drugog sistema je očigledna potpuna dinamička neusaglašenost signala.
SL. 6-32 OGRANIČENJE IZLAZA INTEGRATORA –
PRVIH DESET PERIODA ODABIRANJA SL. 6-33 KONTROLER SA OBSERVEROM – PRVIH
DESET PERIODA ODABIRANJA
SL. 6-31 UPRAVLJANJE KLATNOM SA POREMEĆAJEM TIPA POČETNIH USLOVA –
KONTROLER SA OBSERVEROM
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
t
upra
vlja
nje
ui ogranicen
ui neogranicen
u sa observerom
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
t
gres
ka
ui ograniceno
ui neograniceno
u sa observerom
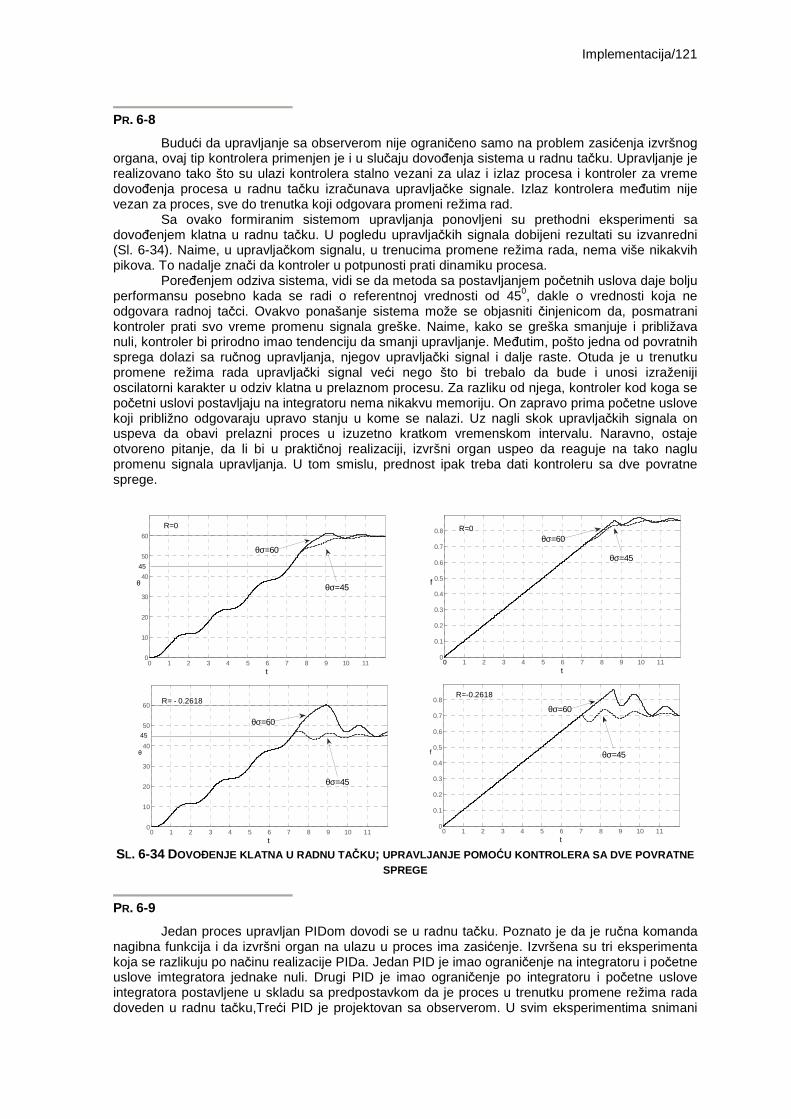
Implementacija/121
PR. 6-8
Budući da upravljanje sa observerom nije ograničeno samo na problem zasićenja izvršnog organa, ovaj tip kontrolera primenjen je i u slučaju dovođenja sistema u radnu tačku. Upravljanje je realizovano tako što su ulazi kontrolera stalno vezani za ulaz i izlaz procesa i kontroler za vreme dovođenja procesa u radnu tačku izračunava upravljačke signale. Izlaz kontrolera međutim nije vezan za proces, sve do trenutka koji odgovara promeni režima rad.
Sa ovako formiranim sistemom upravljanja ponovljeni su prethodni eksperimenti sa dovođenjem klatna u radnu tačku. U pogledu upravljačkih signala dobijeni rezultati su izvanredni (Sl. 6-34). Naime, u upravljačkom signalu, u trenucima promene režima rada, nema više nikakvih pikova. To nadalje znači da kontroler u potpunosti prati dinamiku procesa.
Poređenjem odziva sistema, vidi se da metoda sa postavljanjem početnih uslova daje bolju performansu posebno kada se radi o referentnoj vrednosti od 450, dakle o vrednosti koja ne odgovara radnoj tačci. Ovakvo ponašanje sistema može se objasniti činjenicom da, posmatrani kontroler prati svo vreme promenu signala greške. Naime, kako se greška smanjuje i približava nuli, kontroler bi prirodno imao tendenciju da smanji upravljanje. Međutim, pošto jedna od povratnih sprega dolazi sa ručnog upravljanja, njegov upravljački signal i dalje raste. Otuda je u trenutku promene režima rada upravljački signal veći nego što bi trebalo da bude i unosi izraženiji oscilatorni karakter u odziv klatna u prelaznom procesu. Za razliku od njega, kontroler kod koga se početni uslovi postavljaju na integratoru nema nikakvu memoriju. On zapravo prima početne uslove koji približno odgovaraju upravo stanju u kome se nalazi. Uz nagli skok upravljačkih signala on uspeva da obavi prelazni proces u izuzetno kratkom vremenskom intervalu. Naravno, ostaje otvoreno pitanje, da li bi u praktičnoj realizaciji, izvršni organ uspeo da reaguje na tako naglu promenu signala upravljanja. U tom smislu, prednost ipak treba dati kontroleru sa dve povratne sprege.
SL. 6-34 DOVOĐENJE KLATNA U RADNU TA ČKU; UPRAVLJANJE POMO ĆU KONTROLERA SA DVE POVRATNE
SPREGE
PR. 6-9
Jedan proces upravljan PIDom dovodi se u radnu tačku. Poznato je da je ručna komanda nagibna funkcija i da izvršni organ na ulazu u proces ima zasićenje. Izvršena su tri eksperimenta koja se razlikuju po načinu realizacije PIDa. Jedan PID je imao ograničenje na integratoru i početne uslove imtegratora jednake nuli. Drugi PID je imao ograničenje po integratoru i početne uslove integratora postavljene u skladu sa predpostavkom da je proces u trenutku promene režima rada doveden u radnu tačku,Treći PID je projektovan sa observerom. U svim eksperimentima snimani
0 1 2 3 4 5 6 7 8 9 10 110
10
20
30
40
50
60
t
θ
R=0
45
θσ=45
θσ=60
0 1 20 3 4 5 6 7 8 9 10 110
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
t
f
R=0
θσ=45
θσ=60
0 1 2 3 4 5 6 7 8 9 10 110
10
20
30
40
50
60
t
θ
R= - 0.2618
45
θσ=45
θσ=60
0 1 2 3 4 5 6 7 8 9 10 110
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
t
f
R=-0.2618
θσ=60
θσ=45
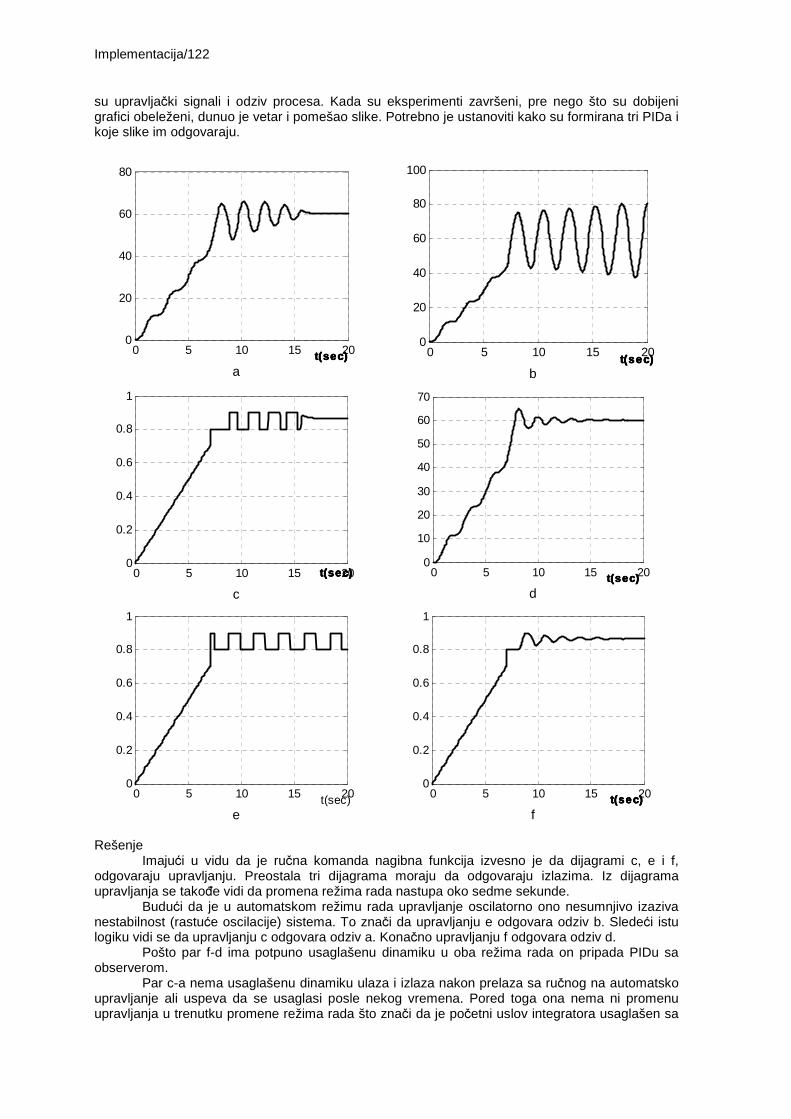
Implementacija/122
su upravljački signali i odziv procesa. Kada su eksperimenti završeni, pre nego što su dobijeni grafici obeleženi, dunuo je vetar i pomešao slike. Potrebno je ustanoviti kako su formirana tri PIDa i koje slike im odgovaraju.
a
b
c
d
e
f
Rešenje
Imajući u vidu da je ručna komanda nagibna funkcija izvesno je da dijagrami c, e i f, odgovaraju upravljanju. Preostala tri dijagrama moraju da odgovaraju izlazima. Iz dijagrama upravljanja se takođe vidi da promena režima rada nastupa oko sedme sekunde.
Budući da je u automatskom režimu rada upravljanje oscilatorno ono nesumnjivo izaziva nestabilnost (rastuće oscilacije) sistema. To znači da upravljanju e odgovara odziv b. Sledeći istu logiku vidi se da upravljanju c odgovara odziv a. Konačno upravljanju f odgovara odziv d.
Pošto par f-d ima potpuno usaglašenu dinamiku u oba režima rada on pripada PIDu sa observerom.
Par c-a nema usaglašenu dinamiku ulaza i izlaza nakon prelaza sa ručnog na automatsko upravljanje ali uspeva da se usaglasi posle nekog vremena. Pored toga ona nema ni promenu upravljanja u trenutku promene režima rada što znači da je početni uslov integratora usaglašen sa
0 5 10 15 200
20
40
60
80
t(sec)t(sec)t(sec)t(sec) 0 5 10 15 200
20
40
60
80
100
t(sec)t(sec)t(sec)t(sec)
0 5 10 15 200
0.2
0.4
0.6
0.8
1
t(sec)t(sec)t(sec)t(sec) 0 5 10 15 200
10
20
30
40
50
60
70
t(sec)t(sec)t(sec)t(sec)
0 5 10 15 200
0.2
0.4
0.6
0.8
1
t(sec) 0 5 10 15 200
0.2
0.4
0.6
0.8
1
t(sec)t(sec)t(sec)t(sec)
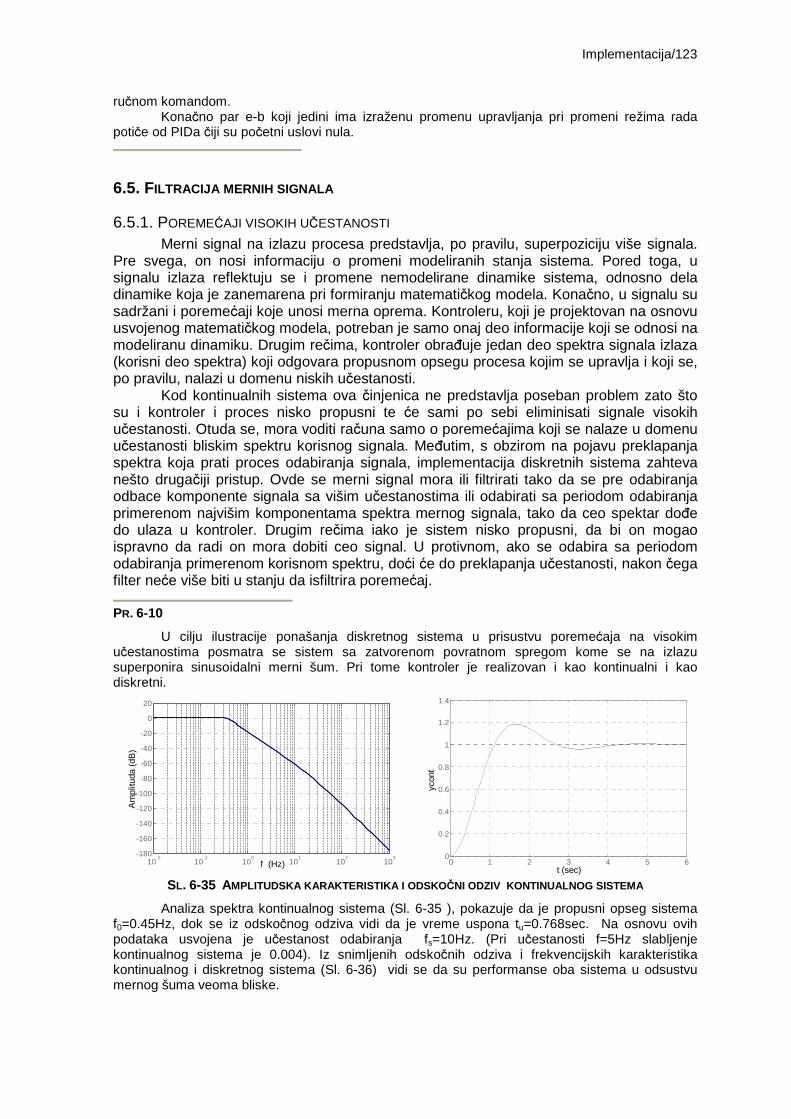
Implementacija/123
ručnom komandom. Konačno par e-b koji jedini ima izraženu promenu upravljanja pri promeni režima rada
potiče od PIDa čiji su početni uslovi nula.
6.5. FILTRACIJA MERNIH SIGNALA
6.5.1. POREMEĆAJI VISOKIH UČESTANOSTI Merni signal na izlazu procesa predstavlja, po pravilu, superpoziciju više signala.
Pre svega, on nosi informaciju o promeni modeliranih stanja sistema. Pored toga, u signalu izlaza reflektuju se i promene nemodelirane dinamike sistema, odnosno dela dinamike koja je zanemarena pri formiranju matematičkog modela. Konačno, u signalu su sadržani i poremećaji koje unosi merna oprema. Kontroleru, koji je projektovan na osnovu usvojenog matematičkog modela, potreban je samo onaj deo informacije koji se odnosi na modeliranu dinamiku. Drugim rečima, kontroler obrađuje jedan deo spektra signala izlaza (korisni deo spektra) koji odgovara propusnom opsegu procesa kojim se upravlja i koji se, po pravilu, nalazi u domenu niskih učestanosti.
Kod kontinualnih sistema ova činjenica ne predstavlja poseban problem zato što su i kontroler i proces nisko propusni te će sami po sebi eliminisati signale visokih učestanosti. Otuda se, mora voditi računa samo o poremećajima koji se nalaze u domenu učestanosti bliskim spektru korisnog signala. Međutim, s obzirom na pojavu preklapanja spektra koja prati proces odabiranja signala, implementacija diskretnih sistema zahteva nešto drugačiji pristup. Ovde se merni signal mora ili filtrirati tako da se pre odabiranja odbace komponente signala sa višim učestanostima ili odabirati sa periodom odabiranja primerenom najvišim komponentama spektra mernog signala, tako da ceo spektar dođe do ulaza u kontroler. Drugim rečima iako je sistem nisko propusni, da bi on mogao ispravno da radi on mora dobiti ceo signal. U protivnom, ako se odabira sa periodom odabiranja primerenom korisnom spektru, doći će do preklapanja učestanosti, nakon čega filter neće više biti u stanju da isfiltrira poremećaj.
PR. 6-10
U cilju ilustracije ponašanja diskretnog sistema u prisustvu poremećaja na visokim učestanostima posmatra se sistem sa zatvorenom povratnom spregom kome se na izlazu superponira sinusoidalni merni šum. Pri tome kontroler je realizovan i kao kontinualni i kao diskretni.
SL. 6-35 AMPLITUDSKA KARAKTERISTIKA I ODSKO ČNI ODZIV KONTINUALNOG SISTEMA
Analiza spektra kontinualnog sistema (Sl. 6-35 ), pokazuje da je propusni opseg sistema f0=0.45Hz, dok se iz odskočnog odziva vidi da je vreme uspona tu=0.768sec. Na osnovu ovih podataka usvojena je učestanost odabiranja fs=10Hz. (Pri učestanosti f=5Hz slabljenje kontinualnog sistema je 0.004). Iz snimljenih odskočnih odziva i frekvencijskih karakteristika kontinualnog i diskretnog sistema (Sl. 6-36) vidi se da su performanse oba sistema u odsustvu mernog šuma veoma bliske.
f (Hz)10-2
10-1
100
101
102
103
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
20
Am
plitu
da (
dB)
t (sec)
ycon
t
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
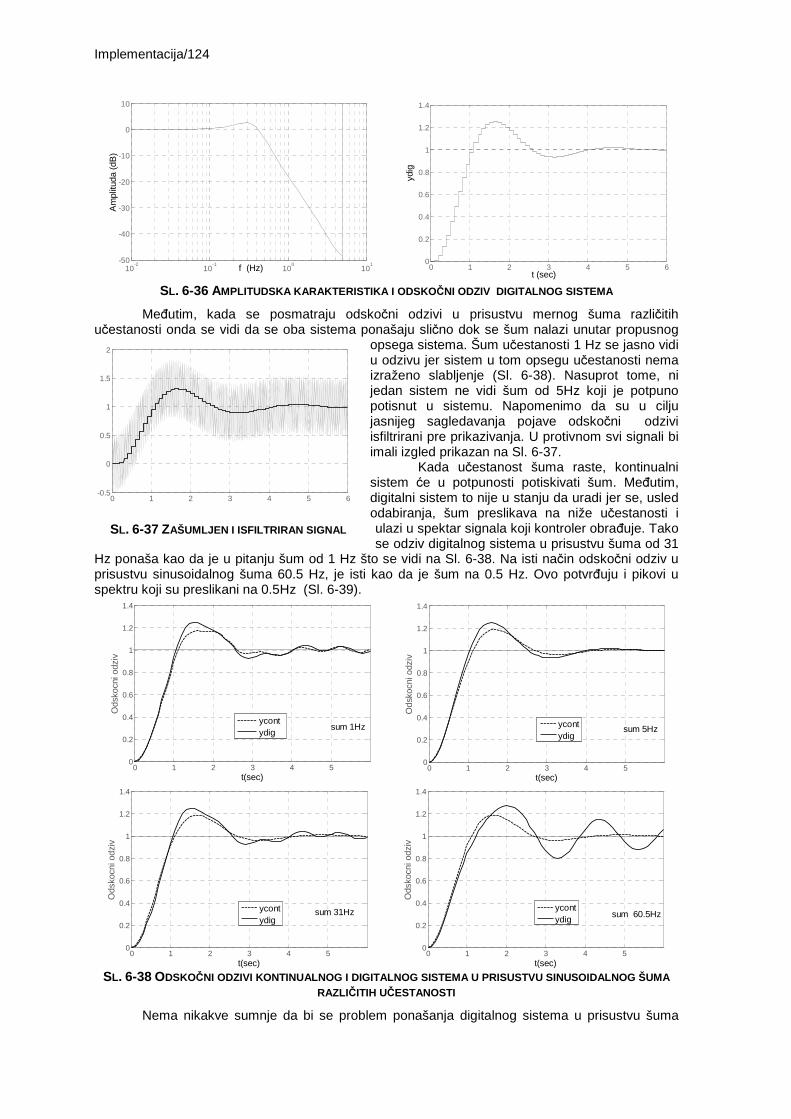
Implementacija/124
SL. 6-36 AMPLITUDSKA KARAKTERISTIKA I ODSKO ČNI ODZIV DIGITALNOG SISTEMA
Međutim, kada se posmatraju odskočni odzivi u prisustvu mernog šuma različitih učestanosti onda se vidi da se oba sistema ponašaju slično dok se šum nalazi unutar propusnog
opsega sistema. Šum učestanosti 1 Hz se jasno vidi u odzivu jer sistem u tom opsegu učestanosti nema izraženo slabljenje (Sl. 6-38). Nasuprot tome, ni jedan sistem ne vidi šum od 5Hz koji je potpuno potisnut u sistemu. Napomenimo da su u cilju jasnijeg sagledavanja pojave odskočni odzivi isfiltrirani pre prikazivanja. U protivnom svi signali bi imali izgled prikazan na Sl. 6-37.
Kada učestanost šuma raste, kontinualni sistem će u potpunosti potiskivati šum. Međutim, digitalni sistem to nije u stanju da uradi jer se, usled odabiranja, šum preslikava na niže učestanosti i ulazi u spektar signala koji kontroler obrađuje. Tako se odziv digitalnog sistema u prisustvu šuma od 31
Hz ponaša kao da je u pitanju šum od 1 Hz što se vidi na Sl. 6-38. Na isti način odskočni odziv u prisustvu sinusoidalnog šuma 60.5 Hz, je isti kao da je šum na 0.5 Hz. Ovo potvrđuju i pikovi u spektru koji su preslikani na 0.5Hz (Sl. 6-39).
SL. 6-38 ODSKOČNI ODZIVI KONTINUALNOG I DIGITALNOG SISTEMA U PRISU STVU SINUSOIDALNOG ŠUMA
RAZLIČITIH UČESTANOSTI
Nema nikakve sumnje da bi se problem ponašanja digitalnog sistema u prisustvu šuma
f (Hz)10-2
10-1
100
101
-50
-40
-30
-20
-10
0
10A
mpl
ituda
(dB
)
t (sec)
ydig
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
t(sec)
Ods
kocn
i odz
iv
sum 1Hzycontydig
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
t(sec)
Ods
kocn
i odz
iv
sum 5Hzycontydig
yc
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
t(sec)
Ods
kocn
i odz
iv
ycontydig
sum 31Hz
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
t(sec)
Ods
kocn
i odz
iv
sum 60.5Hz ycontydig
SL. 6-37 ZAŠUMLJEN I ISFILTRIRAN SIGNAL
0 1 2 3 4 5 6-0.5
0
0.5
1
1.5
2
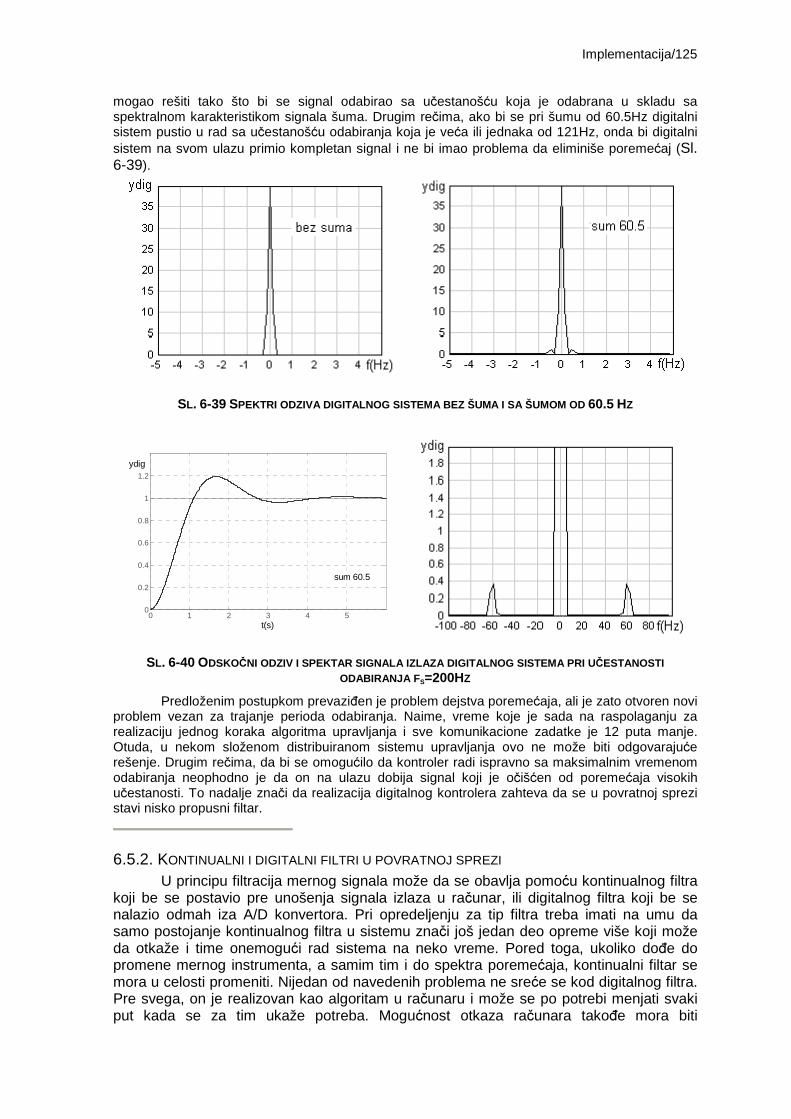
Implementacija/125
mogao rešiti tako što bi se signal odabirao sa učestanošću koja je odabrana u skladu sa spektralnom karakteristikom signala šuma. Drugim rečima, ako bi se pri šumu od 60.5Hz digitalni sistem pustio u rad sa učestanošću odabiranja koja je veća ili jednaka od 121Hz, onda bi digitalni sistem na svom ulazu primio kompletan signal i ne bi imao problema da eliminiše poremećaj (Sl. 6-39).
SL. 6-39 SPEKTRI ODZIVA DIGITALNOG SISTEMA BEZ ŠUMA I SA ŠUMO M OD 60.5 HZ
SL. 6-40 ODSKOČNI ODZIV I SPEKTAR SIGNALA IZLAZA DIGITALNOG SISTEM A PRI UČESTANOSTI
ODABIRANJA F S=200HZ
Predloženim postupkom prevaziđen je problem dejstva poremećaja, ali je zato otvoren novi problem vezan za trajanje perioda odabiranja. Naime, vreme koje je sada na raspolaganju za realizaciju jednog koraka algoritma upravljanja i sve komunikacione zadatke je 12 puta manje. Otuda, u nekom složenom distribuiranom sistemu upravljanja ovo ne može biti odgovarajuće rešenje. Drugim rečima, da bi se omogućilo da kontroler radi ispravno sa maksimalnim vremenom odabiranja neophodno je da on na ulazu dobija signal koji je očišćen od poremećaja visokih učestanosti. To nadalje znači da realizacija digitalnog kontrolera zahteva da se u povratnoj sprezi stavi nisko propusni filtar.
6.5.2. KONTINUALNI I DIGITALNI FILTRI U POVRATNOJ SPREZI U principu filtracija mernog signala može da se obavlja pomoću kontinualnog filtra
koji be se postavio pre unošenja signala izlaza u računar, ili digitalnog filtra koji be se nalazio odmah iza A/D konvertora. Pri opredeljenju za tip filtra treba imati na umu da samo postojanje kontinualnog filtra u sistemu znači još jedan deo opreme više koji može da otkaže i time onemogući rad sistema na neko vreme. Pored toga, ukoliko dođe do promene mernog instrumenta, a samim tim i do spektra poremećaja, kontinualni filtar se mora u celosti promeniti. Nijedan od navedenih problema ne sreće se kod digitalnog filtra. Pre svega, on je realizovan kao algoritam u računaru i može se po potrebi menjati svaki put kada se za tim ukaže potreba. Mogućnost otkaza računara takođe mora biti
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
t(s)
ydig
sum 60.5
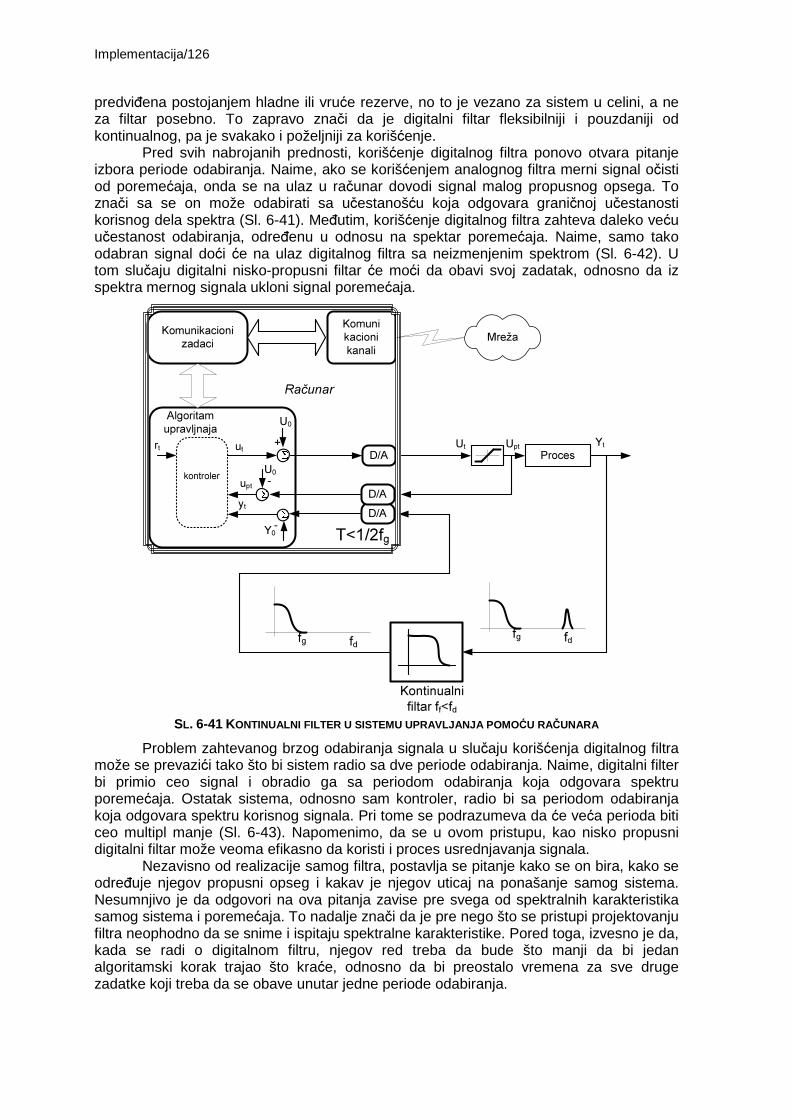
Implementacija/126
predviđena postojanjem hladne ili vruće rezerve, no to je vezano za sistem u celini, a ne za filtar posebno. To zapravo znači da je digitalni filtar fleksibilniji i pouzdaniji od kontinualnog, pa je svakako i poželjniji za korišćenje.
Pred svih nabrojanih prednosti, korišćenje digitalnog filtra ponovo otvara pitanje izbora periode odabiranja. Naime, ako se korišćenjem analognog filtra merni signal očisti od poremećaja, onda se na ulaz u računar dovodi signal malog propusnog opsega. To znači sa se on može odabirati sa učestanošću koja odgovara graničnoj učestanosti korisnog dela spektra (Sl. 6-41). Međutim, korišćenje digitalnog filtra zahteva daleko veću učestanost odabiranja, određenu u odnosu na spektar poremećaja. Naime, samo tako odabran signal doći će na ulaz digitalnog filtra sa neizmenjenim spektrom (Sl. 6-42). U tom slučaju digitalni nisko-propusni filtar će moći da obavi svoj zadatak, odnosno da iz spektra mernog signala ukloni signal poremećaja.
SL. 6-41 KONTINUALNI FILTER U SISTEMU UPRAVLJANJA POMO ĆU RAČUNARA
Problem zahtevanog brzog odabiranja signala u slučaju korišćenja digitalnog filtra može se prevazići tako što bi sistem radio sa dve periode odabiranja. Naime, digitalni filter bi primio ceo signal i obradio ga sa periodom odabiranja koja odgovara spektru poremećaja. Ostatak sistema, odnosno sam kontroler, radio bi sa periodom odabiranja koja odgovara spektru korisnog signala. Pri tome se podrazumeva da će veća perioda biti ceo multipl manje (Sl. 6-43). Napomenimo, da se u ovom pristupu, kao nisko propusni digitalni filtar može veoma efikasno da koristi i proces usrednjavanja signala.
Nezavisno od realizacije samog filtra, postavlja se pitanje kako se on bira, kako se određuje njegov propusni opseg i kakav je njegov uticaj na ponašanje samog sistema. Nesumnjivo je da odgovori na ova pitanja zavise pre svega od spektralnih karakteristika samog sistema i poremećaja. To nadalje znači da je pre nego što se pristupi projektovanju filtra neophodno da se snime i ispitaju spektralne karakteristike. Pored toga, izvesno je da, kada se radi o digitalnom filtru, njegov red treba da bude što manji da bi jedan algoritamski korak trajao što kraće, odnosno da bi preostalo vremena za sve druge zadatke koji treba da se obave unutar jedne periode odabiranja.
ProcesUt YtUpt
D/A
D/A
D/A
Komunikacioni
zadaci
rt +
U0
ut
kontroler
Algoritam
upravljnaja
-
yt
Y0
-U0
upt
Komuni
kacioni
kanali
Mreža
Računar
fdfg
fdfg
T<1/2fg
Kontinualni
filtar ff<fd
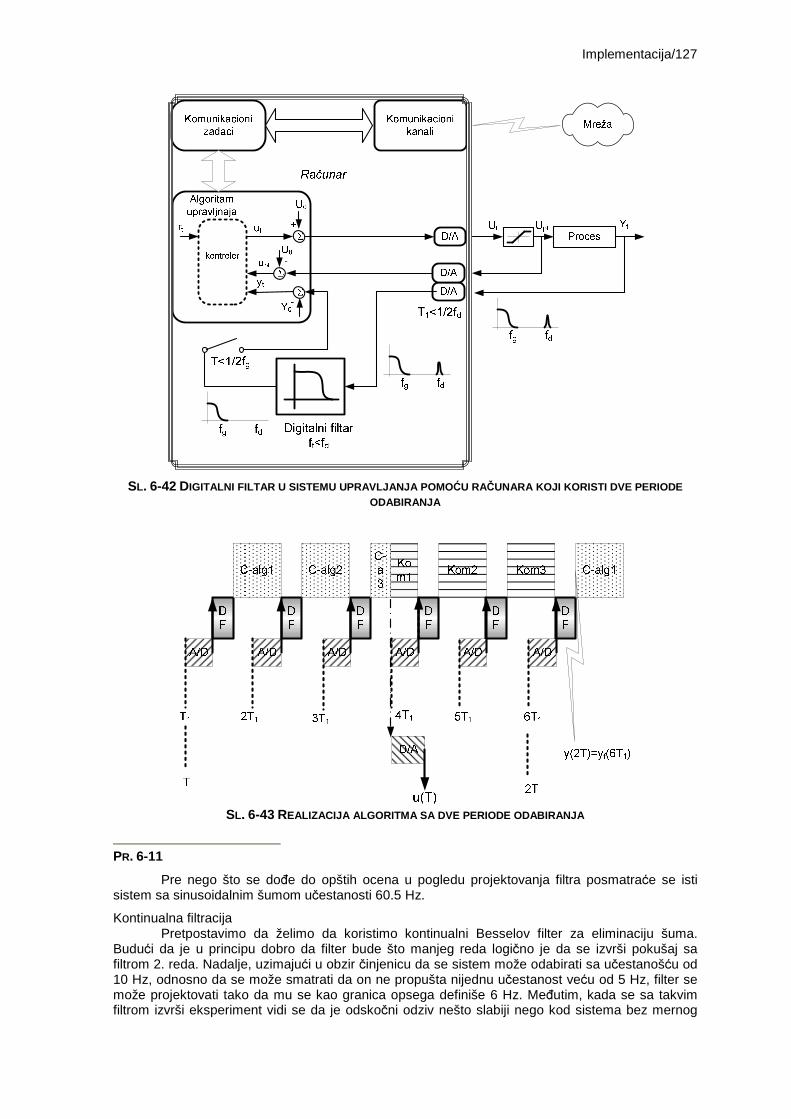
Implementacija/127
SL. 6-42 DIGITALNI FILTAR U SISTEMU UPRAVLJANJA POMO ĆU RAČUNARA KOJI KORISTI DVE PERIODE ODABIRANJA
SL. 6-43 REALIZACIJA ALGORITMA SA DVE PERIODE ODABIRANJA
PR. 6-11
Pre nego što se dođe do opštih ocena u pogledu projektovanja filtra posmatraće se isti sistem sa sinusoidalnim šumom učestanosti 60.5 Hz.
Kontinualna filtracija Pretpostavimo da želimo da koristimo kontinualni Besselov filter za eliminaciju šuma.
Budući da je u principu dobro da filter bude što manjeg reda logično je da se izvrši pokušaj sa filtrom 2. reda. Nadalje, uzimajući u obzir činjenicu da se sistem može odabirati sa učestanošću od 10 Hz, odnosno da se može smatrati da on ne propušta nijednu učestanost veću od 5 Hz, filter se može projektovati tako da mu se kao granica opsega definiše 6 Hz. Međutim, kada se sa takvim filtrom izvrši eksperiment vidi se da je odskočni odziv nešto slabiji nego kod sistema bez mernog
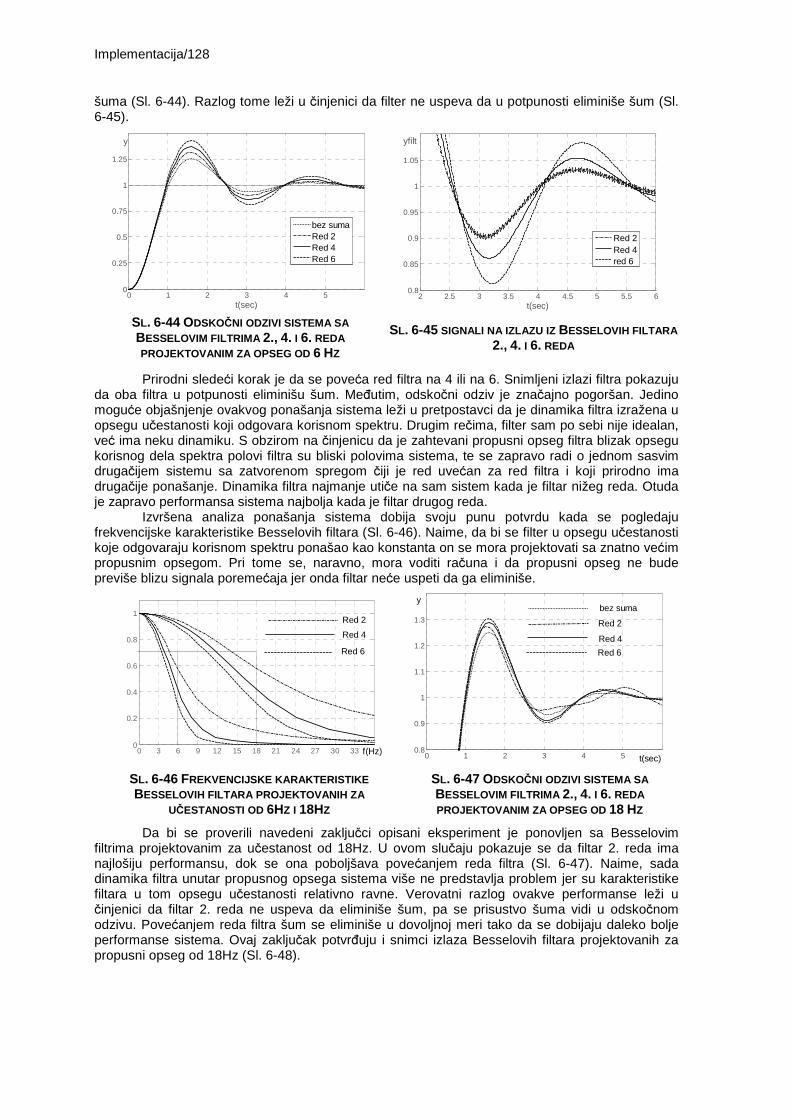
Implementacija/128
šuma (Sl. 6-44). Razlog tome leži u činjenici da filter ne uspeva da u potpunosti eliminiše šum (Sl. 6-45).
SL. 6-44 ODSKOČNI ODZIVI SISTEMA SA BESSELOVIM FILTRIMA 2., 4. I 6. REDA PROJEKTOVANIM ZA OPSEG OD 6 HZ
SL. 6-45 SIGNALI NA IZLAZU IZ BESSELOVIH FILTARA 2., 4. I 6. REDA
Prirodni sledeći korak je da se poveća red filtra na 4 ili na 6. Snimljeni izlazi filtra pokazuju da oba filtra u potpunosti eliminišu šum. Međutim, odskočni odziv je značajno pogoršan. Jedino moguće objašnjenje ovakvog ponašanja sistema leži u pretpostavci da je dinamika filtra izražena u opsegu učestanosti koji odgovara korisnom spektru. Drugim rečima, filter sam po sebi nije idealan, već ima neku dinamiku. S obzirom na činjenicu da je zahtevani propusni opseg filtra blizak opsegu korisnog dela spektra polovi filtra su bliski polovima sistema, te se zapravo radi o jednom sasvim drugačijem sistemu sa zatvorenom spregom čiji je red uvećan za red filtra i koji prirodno ima drugačije ponašanje. Dinamika filtra najmanje utiče na sam sistem kada je filtar nižeg reda. Otuda je zapravo performansa sistema najbolja kada je filtar drugog reda.
Izvršena analiza ponašanja sistema dobija svoju punu potvrdu kada se pogledaju frekvencijske karakteristike Besselovih filtara (Sl. 6-46). Naime, da bi se filter u opsegu učestanosti koje odgovaraju korisnom spektru ponašao kao konstanta on se mora projektovati sa znatno većim propusnim opsegom. Pri tome se, naravno, mora voditi računa i da propusni opseg ne bude previše blizu signala poremećaja jer onda filtar neće uspeti da ga eliminiše.
SL. 6-46 FREKVENCIJSKE KARAKTERISTIKE BESSELOVIH FILTARA PROJEKTOVANIH ZA
UČESTANOSTI OD 6HZ I 18HZ
SL. 6-47 ODSKOČNI ODZIVI SISTEMA SA BESSELOVIM FILTRIMA 2., 4. I 6. REDA PROJEKTOVANIM ZA OPSEG OD 18 HZ
Da bi se proverili navedeni zaključci opisani eksperiment je ponovljen sa Besselovim filtrima projektovanim za učestanost od 18Hz. U ovom slučaju pokazuje se da filtar 2. reda ima najlošiju performansu, dok se ona poboljšava povećanjem reda filtra (Sl. 6-47). Naime, sada dinamika filtra unutar propusnog opsega sistema više ne predstavlja problem jer su karakteristike filtara u tom opsegu učestanosti relativno ravne. Verovatni razlog ovakve performanse leži u činjenici da filtar 2. reda ne uspeva da eliminiše šum, pa se prisustvo šuma vidi u odskočnom odzivu. Povećanjem reda filtra šum se eliminiše u dovoljnoj meri tako da se dobijaju daleko bolje performanse sistema. Ovaj zaključak potvrđuju i snimci izlaza Besselovih filtara projektovanih za propusni opseg od 18Hz (Sl. 6-48).
0 1 2 3 4 50
0.25
0.5
0.75
1
1.25
t(sec)
y
bez sumaRed 2Red 4Red 6
2 2.5 3 3.5 4 4.5 5 5.5 60.8
0.85
0.9
0.95
1
1.05
t(sec)
yfilt
Red 2Red 4red 6
0 3 6 9 12 15 18 21 24 27 30 330
0.2
0.4
0.6
0.8
1
Red 2
Red 4
Red 6
f(Hz) 0 1 2 3 4 50.8
0.9
1
1.1
1.2
1.3
t(sec)
y
bez suma
Red 2
Red 4
Red 6
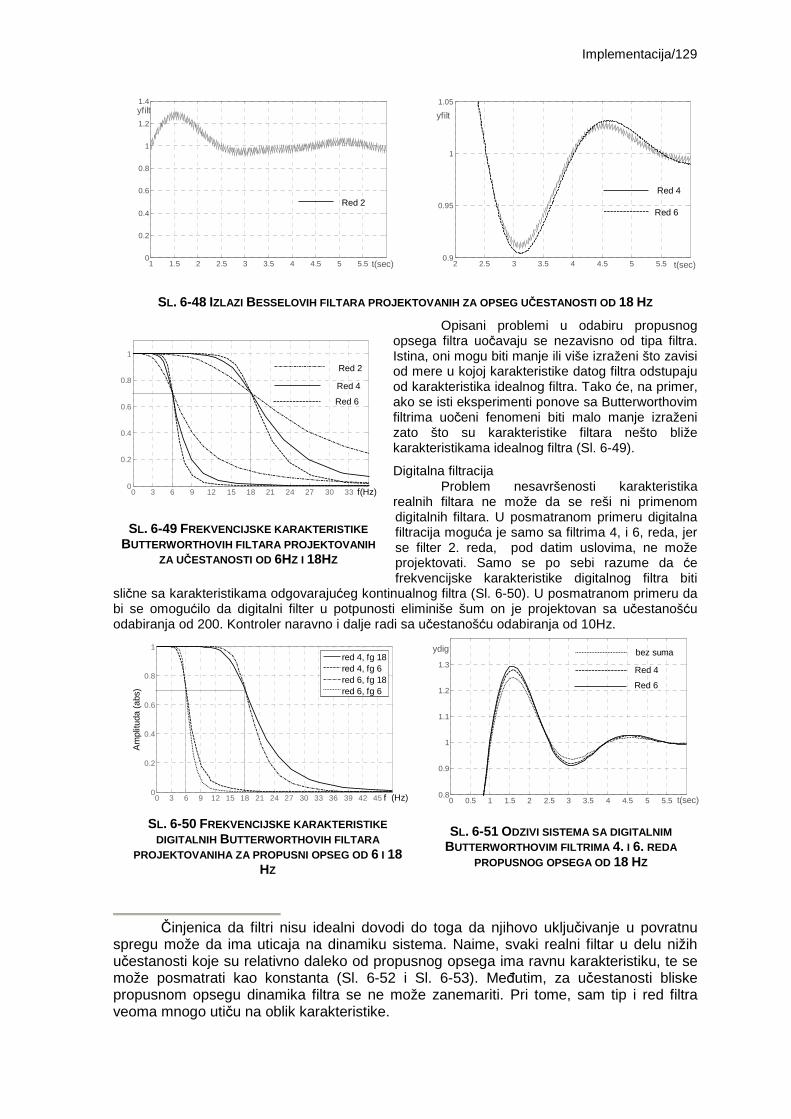
Implementacija/129
SL. 6-48 IZLAZI BESSELOVIH FILTARA PROJEKTOVANIH ZA OPSEG U ČESTANOSTI OD 18 HZ
Opisani problemi u odabiru propusnog opsega filtra uočavaju se nezavisno od tipa filtra. Istina, oni mogu biti manje ili više izraženi što zavisi od mere u kojoj karakteristike datog filtra odstupaju od karakteristika idealnog filtra. Tako će, na primer, ako se isti eksperimenti ponove sa Butterworthovim filtrima uočeni fenomeni biti malo manje izraženi zato što su karakteristike filtara nešto bliže karakteristikama idealnog filtra (Sl. 6-49).
Digitalna filtracija Problem nesavršenosti karakteristika
realnih filtara ne može da se reši ni primenom digitalnih filtara. U posmatranom primeru digitalna filtracija moguća je samo sa filtrima 4, i 6, reda, jer se filter 2. reda, pod datim uslovima, ne može projektovati. Samo se po sebi razume da će frekvencijske karakteristike digitalnog filtra biti
slične sa karakteristikama odgovarajućeg kontinualnog filtra (Sl. 6-50). U posmatranom primeru da bi se omogućilo da digitalni filter u potpunosti eliminiše šum on je projektovan sa učestanošću odabiranja od 200. Kontroler naravno i dalje radi sa učestanošću odabiranja od 10Hz.
SL. 6-50 FREKVENCIJSKE KARAKTERISTIKE
DIGITALNIH BUTTERWORTHOVIH FILTARA PROJEKTOVANIHA ZA PROPUSNI OPSEG OD 6 I 18
HZ
SL. 6-51 ODZIVI SISTEMA SA DIGITALNIM BUTTERWORTHOVIM FILTRIMA 4. I 6. REDA
PROPUSNOG OPSEGA OD 18 HZ
Činjenica da filtri nisu idealni dovodi do toga da njihovo uključivanje u povratnu spregu može da ima uticaja na dinamiku sistema. Naime, svaki realni filtar u delu nižih učestanosti koje su relativno daleko od propusnog opsega ima ravnu karakteristiku, te se može posmatrati kao konstanta (Sl. 6-52 i Sl. 6-53). Međutim, za učestanosti bliske propusnom opsegu dinamika filtra se ne može zanemariti. Pri tome, sam tip i red filtra veoma mnogo utiču na oblik karakteristike.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.50
0.2
0.4
0.6
0.8
1
1.2
1.4
t(sec)
yfilt
Red 2
2 2.5 3 3.5 4 4.5 5 5.50.9
0.95
1
1.05
t(sec)
yfilt
Red 4
Red 6
f (Hz)0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 450
0.2
0.4
0.6
0.8
1
Am
plitu
da (
abs)
red 4, fg 18red 4, fg 6red 6, fg 18red 6, fg 6
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.50.8
0.9
1
1.1
1.2
1.3
t(sec)
ydig
bez suma
Red 4
Red 6
SL. 6-49 FREKVENCIJSKE KARAKTERISTIKE BUTTERWORTHOVIH FILTARA PROJEKTOVANIH
ZA UČESTANOSTI OD 6HZ I 18HZ
0 3 6 9 12 15 18 21 24 27 30 330
0.2
0.4
0.6
0.8
1
Red 6
Red 2
Red 4
f(Hz)
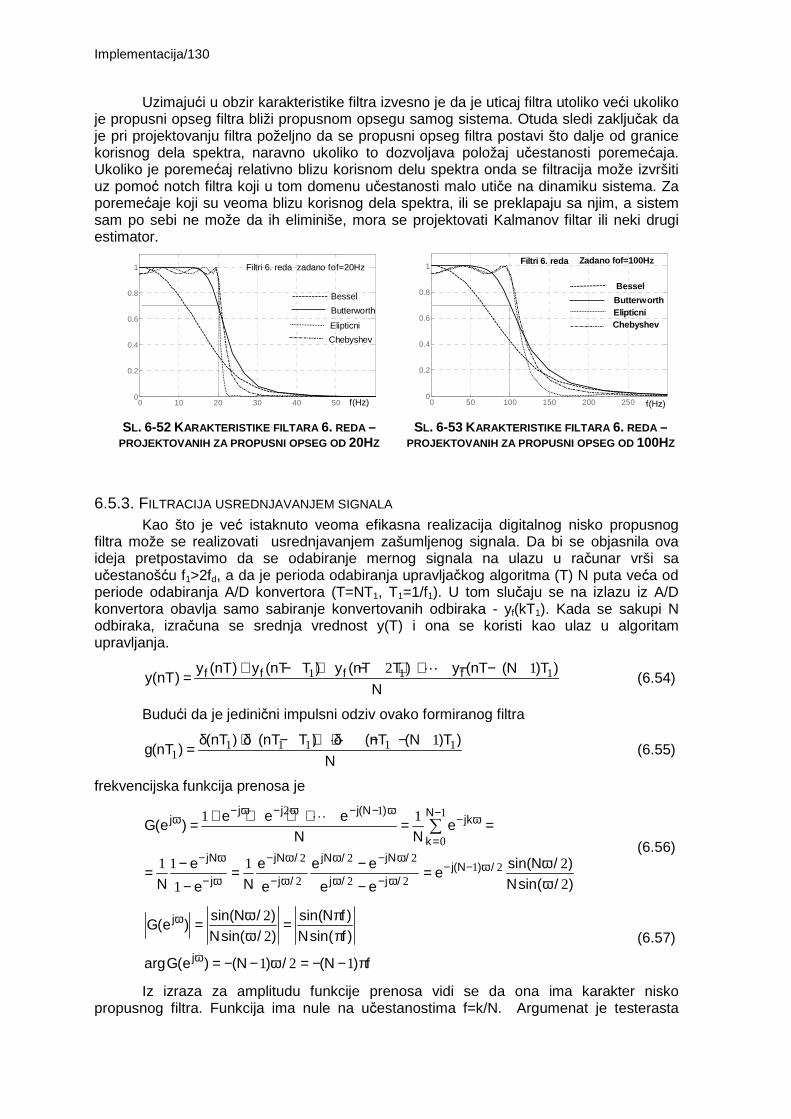
Implementacija/130
Uzimajući u obzir karakteristike filtra izvesno je da je uticaj filtra utoliko veći ukoliko je propusni opseg filtra bliži propusnom opsegu samog sistema. Otuda sledi zaključak da je pri projektovanju filtra poželjno da se propusni opseg filtra postavi što dalje od granice korisnog dela spektra, naravno ukoliko to dozvoljava položaj učestanosti poremećaja. Ukoliko je poremećaj relativno blizu korisnom delu spektra onda se filtracija može izvršiti uz pomoć notch filtra koji u tom domenu učestanosti malo utiče na dinamiku sistema. Za poremećaje koji su veoma blizu korisnog dela spektra, ili se preklapaju sa njim, a sistem sam po sebi ne može da ih eliminiše, mora se projektovati Kalmanov filtar ili neki drugi estimator.
SL. 6-52 KARAKTERISTIKE FILTARA 6. REDA –
PROJEKTOVANIH ZA PROPUSNI OPSEG OD 20HZ SL. 6-53 KARAKTERISTIKE FILTARA 6. REDA –
PROJEKTOVANIH ZA PROPUSNI OPSEG OD 100HZ
6.5.3. FILTRACIJA USREDNJAVANJEM SIGNALA Kao što je već istaknuto veoma efikasna realizacija digitalnog nisko propusnog
filtra može se realizovati usrednjavanjem zašumljenog signala. Da bi se objasnila ova ideja pretpostavimo da se odabiranje mernog signala na ulazu u računar vrši sa učestanošću f1>2fd, a da je perioda odabiranja upravljačkog algoritma (T) N puta veća od periode odabiranja A/D konvertora (T=NT1, T1=1/f1). U tom slučaju se na izlazu iz A/D konvertora obavlja samo sabiranje konvertovanih odbiraka - yf(kT1). Kada se sakupi N odbiraka, izračuna se srednja vrednost y(T) i ona se koristi kao ulaz u algoritam upravljanja.
1 1 12 1f f f fy (nT) y (nT T ) y (nT T ) y (nT (N )T )y(nT)
N
+ − + − + + − −=
L
(6.54)
Budući da je jedinični impulsni odziv ovako formiranog filtra
1 1 1 1 11
1(nT ) (nT T ) (nT (N )T )g(nT )
N
δ + δ − + + δ − −=
L
(6.55)
frekvencijska funkcija prenosa je
2 1 1
0
2 2 21 2
2 2 2
1 1
1 1 1 2
21
j j j(N ) Nj jk
kjN jN / jN / jN /
j(N ) /j j / j / j /
e e eG(e ) e
N N
e e e e sin(N / )e
N N Nsin( / )e e e e
− ω − ω − − ω −ω − ω
=− ω − ω ω − ω
− − ω− ω − ω ω − ω
+ + + += = =
− − ω= = =ω− −
∑L
(6.56)
2
2
1 2 1
j
j
sin(N / ) sin(N f )G(e )
Nsin( / ) Nsin( f )
argG(e ) (N ) / (N ) f
ω
ω
ω π= =ω π
= − − ω = − − π
(6.57)
Iz izraza za amplitudu funkcije prenosa vidi se da ona ima karakter nisko propusnog filtra. Funkcija ima nule na učestanostima f=k/N. Argumenat je testerasta
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
f(Hz)
Chebyshev
Elipticni
Butterworth
Bessel
Filtri 6. reda zadano fof=20Hz
0 50 100 150 200 2500
0.2
0.4
0.6
0.8
1
Bessel
ButterworthElipticniChebyshev
Zadano fof=100HzFiltri 6. reda
f(Hz)
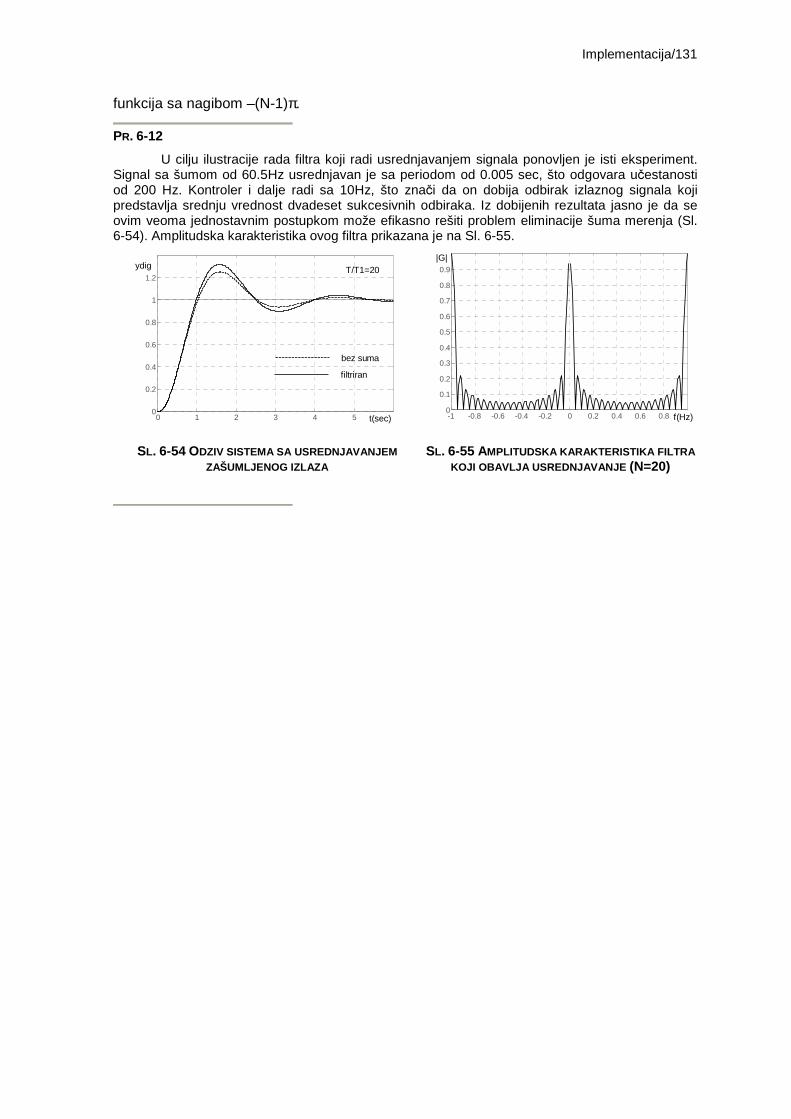
Implementacija/131
funkcija sa nagibom –(N-1)π.
PR. 6-12
U cilju ilustracije rada filtra koji radi usrednjavanjem signala ponovljen je isti eksperiment. Signal sa šumom od 60.5Hz usrednjavan je sa periodom od 0.005 sec, što odgovara učestanosti od 200 Hz. Kontroler i dalje radi sa 10Hz, što znači da on dobija odbirak izlaznog signala koji predstavlja srednju vrednost dvadeset sukcesivnih odbiraka. Iz dobijenih rezultata jasno je da se ovim veoma jednostavnim postupkom može efikasno rešiti problem eliminacije šuma merenja (Sl. 6-54). Amplitudska karakteristika ovog filtra prikazana je na Sl. 6-55.
SL. 6-54 ODZIV SISTEMA SA USREDNJAVANJEM ZAŠUMLJENOG IZLAZA
SL. 6-55 AMPLITUDSKA KARAKTERISTIKA FILTRA KOJI OBAVLJA USREDNJAVANJE (N=20)
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
t(sec)
ydig T/T1=20
bez suma
filtriran
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
f(Hz)
|G|