UNIVERSIDAD AUTÓNOMA DE SINALOA - … · Un variador de frecuencia es un sistema para el control...
28
UNIVERSIDAD AUTÓNOMA DE SINALOA INGENIERÍA EN PROCESOS INDUSTRIALES Proyecto: “Pluma de estacionamiento automatizada” Autores: Barraza Sánchez Carmen Angélica Burgos Torres José Ernesto Liera Peña Juan Carlos Mendoza García María Fernanda Sánchez de Losa Amelia Profesor: Ing. Mario Jaime García Irigoyen Grupo: 3-1 Culiacán Sinaloa, a 01 de Mayo de 2016
Transcript of UNIVERSIDAD AUTÓNOMA DE SINALOA - … · Un variador de frecuencia es un sistema para el control...

1
UNIVERSIDAD AUTÓNOMA
DE SINALOA
INGENIERÍA EN PROCESOS INDUSTRIALES
Proyecto: “Pluma de estacionamiento automatizada”
Autores:
Barraza Sánchez Carmen Angélica
Burgos Torres José Ernesto
Liera Peña Juan Carlos
Mendoza García María Fernanda
Sánchez de Losa Amelia
Profesor: Ing. Mario Jaime García Irigoyen
Grupo: 3-1
Culiacán Sinaloa, a 01 de Mayo de 2016

2
Contenido INTRODUCCIÓN .............................................................................................................................. 3
1. CAPITULO | (EL PROBLEMA) ............................................................................................. 4
1.1. PLANTEAMIENTO DEL PROBLEMA ......................................................................... 4
1.2. OBJETIVOS GENERAL Y ESPECIFICOS .................................................................. 4
1.3. JUSTIFICACIÓN E IMPORTANCIA ............................................................................. 4
2. CAPITULO || (MARCO REFERENCIAL) ............................................................................. 5
2.1. MARCO TEÓRICO .......................................................................................................... 5
2.2. MARCO CONCEPTUAL ................................................................................................. 9
3. CAPITULO ||| (PROPUESTA) ............................................................................................. 10
3.1. Localización óptima del sistema .............................................................................. 10
3.2. Determinación del tamaño óptimo del sistema .................................................... 11
3.3. Estudio de operación .................................................................................................. 12
3.4. Descripción del sistema ............................................................................................. 12
3.5. Elección de componentes eléctricos ...................................................................... 12
3.6. Elección de componentes mecánicos y material de estructura ...................... 14
3.7. Características técnicas de los componentes seleccionados ......................... 18
3.8. Estructura de la máquina ........................................................................................... 19
3.9. Diagrama eléctrico ....................................................................................................... 20
3.10. Código del programa de control de modulo lógico LOGO! .......................... 23
CONCLUSIONES ........................................................................................................................... 24
RECOMENDACIONES.................................................................................................................. 26
INSTRUCCIONES DE USO ......................................................................................................... 26
BIBLIOGRAFÍA ............................................................................................................................... 28

3
INTRODUCCIÓN
En el presente trabajo se encuentra la descripción de un sistema automático de una valla articulada para el acceso al estacionamiento de la Facultad de Ingeniería Culiacán. El sistema proporcionará el acceso al estacionamiento vehicular mediante la tecnología de radiofrecuencia, la cual brinda más seguridad, por medio de los controles remotos de tecnología RF, tiene características peculiares, su control será mediante el modulo lógico LOGO!, nuestra máquina también estará constituida por focos indicadores que servirán de señalamientos para él usuario, posteriormente se describe también los sensores, uno de ellos tendrá básicamente la función de detectar la presencia del automóvil en la misma línea de acción donde se encuentra la valla, y la pluma no bajara si detecta la presencia de un automóvil, garantizando la seguridad en la operación del sistema tomando en consideración la orden para el descenso de la valla articulada mediante la radiofrecuencia, mientras que un sensor más proporcionará la señal necesaria para el conteo de automóviles dentro del estacionamiento. Posteriormente encontrará información acerca del funcionamiento del proyecto, los componentes que lo integran y características del mismo todo ello con el fin de llevar a cabo su implementación en la Facultad de Ingeniería Culiacán, dicha tecnología es considerada por la institución como una inversión, que se refleja en variables como ahorro de tiempo, bajar costos al evitar reprocesos, optimización de recursos y seguridad. En una palabra, eficiencia. En el proyecto se aplican conocimientos adquiridos en el área de electrónica, microcontroladores, máquinas eléctricas y PLC durante semestres cursados dentro de la Universidad.

4
1. CAPITULO | (EL PROBLEMA)
1.1. PLANTEAMIENTO DEL PROBLEMA
El control de un instituto de educación superior es un aspecto fundamental para el manejo adecuado de la misma; hablando del control de tiempo y del acceso es un requisito básico para la competitividad dentro de la escuela y seguridad del personal. Sin embargo, todavía existen muchas instituciones en las que no se considera relevante medir y controlar objetivamente el tiempo y el acceso del personal utilizando tecnología. Actualmente la Facultad de Ingeniería Culiacán no cuenta con un sistema tecnológico de control de acceso en la institución como apoyo para minimizar errores o llevar un control, por lo tanto tiene un impacto en el costo de operación y mano de obra. La Facultad de Ingeniería todavía opera el acceso al estacionamiento de la institución con personal de vigilancia, el cual levanta una cuerda de manera manual que impida el paso de automóvil, es evidente notar que este sistema se puede violar en cualquier momento. La necesidad de ser competitivos, ha vuelto obsoletos este tipo de sistemas.
1.2. OBJETIVOS GENERAL Y ESPECIFICOS
Implementar un sistema de control para el parque vehicular de la Facultad de Ingeniería Culiacán al constituir un área de oportunidad que el personal directivo de la Facultad tiene el interés de encontrar una solución aprovechando las habilidades y los conocimientos de los alumnos de la carrera de Ingeniería en Procesos Industriales.
Objetivos específicos
Tener control de acceso de vehículos de entrada y salida, automatizando el proceso.
Seguridad de los miembros de la facultad y equipo de la institución permitiendo solo la entrada de personal.
Seguridad del usuario instalando un sensor que no permita que la pluma
baje, mientras que detecte presencia.
Comodidad del usuario, accionando la pluma con el control por RF sin necesidad de bajar del automóvil.
Facilidad de uso.
1.3. JUSTIFICACIÓN E IMPORTANCIA
Existen instituciones que no consideran relevante medir y reducir el tiempo y acceso del personal utilizando tecnología, para la Facultad de Ingeniería Culiacán el control es un aspecto fundamental que repercute tanto en el tiempo de calidad que el alumno tiene de clases como en la seguridad de la organización para el manejo adecuado de la misma. Un verdadero sistema de control de acceso es mucho más que un simple medio para desbloquear una puerta con un con un control remoto, debe también garantizar el acceso al lugar y ser capaz de proteger a su personal, sus bienes y sus visitantes. El área de la dirección de la Facultad considera de gran importancia la mejora del acceso del personal a la institución, por lo anterior es importante una propuesta de solución que se adapte a las necesidades tecnológicas, operativas y administrativas de la Facultad de Ingeniería Culiacán.

5
Hablando de aspectos técnicos, es recomendable buscar soluciones innovadoras, que faciliten su operación. Dentro de la institución se ha considerado la tecnología como una inversión, que se refleja en variables como ahorro de tiempo, bajar costos al evitar reprocesos, optimización de recursos y seguridad. En una palabra, eficiencia.
2. CAPITULO || (MARCO REFERENCIAL) 2.1. MARCO TEÓRICO
Sensor de proximidad
Los sensores optoelectrónicos permiten la detección precisa y sin contacto de los objetivos. Emiten luz infrarroja, roja o láser, y el objetivo debe interrumpir el haz de luz o reflejarlo hacia el sensor para activar la salida del mismo. La detección optoelectrónica por reflexión difusa se incluyen: proximidad, corte rápido, foco fijo, haz convergente, haz divergente, ángulo abierto, campo fijo, supresión de fondo y supresión de primer plano. Los detectores fotoeléctricos trabajan según el principio de que, cuando una fuente de luz incide sobre una superficie, la luz se dispersa o difunde en varias direcciones. Una pequeña parte de la luz, que puede ser infrarroja, roja o láser, se refleja de vuelta hacia el receptor del sensor. El receptor que se utiliza en este tipo de sensores está diseñado con sensibilidad suficiente para una cantidad de luz menor o más débil que es la que se refleja desde la superficie del objetivo y activa la salida.
Una de las ventajas de los sensores optoelectrónicos de tipo detector fotoeléctrico o de proximidad es que el emisor o fuente de luz y el receptor están en la misma caja, solo es necesario montar un dispositivo y la instalación de cables es más sencilla y rápida. Es una ventaja importante en ubicaciones con poco espacio o en aplicaciones donde no se puede acceder a los dos lados del objetivo, como requieren las barreras fotoeléctricas unidireccionales o las de reflexión. Como solo hay un dispositivo, los detectores

6
fotoeléctricos suelen resultar económicos si se comparan con las barreras fotoeléctricas unidireccionales o las de reflexión. Control de acceso por radio frecuencia (RF)
Se planea implementar la identificación del vehículo por radiofrecuencia, esto quiere decir que no hay necesidad de bajarse del carro o sacar la mano por la ventana para autenticarse. El propósito fundamental de la tecnología RF es transmitir la identidad de un objeto mediante ondas de radio. La frecuencia debe ser programado en la memoria del receptor y de esta manera se asegura que cada receptor únicamente recibe los mensajes correctos, buscando un alto nivel de inmunidad ante interferencias de otros equipos radiofrecuencia.
Motor de corriente alterna (trifásico)
Los motores de inducción son el sistema de accionamiento más utilizado, desde menos de un caballo hasta cientos de caballos de potencia, cuando no se requiere variación de la velocidad de giro. Los motores de inducción monofásicos son muy utilizados en aplicaciones de baja potencia. Por lo tanto, el diseño del rodamiento depende en gran medida de la aplicación final del motor.

7
LOGO! 8 Es una computadora utilizada en la ingeniería automática o automatización industrial, para automatizar procesos electromecánicos, tales como el control de la maquinaria de la fábrica en líneas de montaje o atracciones mecánicas. Los PLC son utilizados en muchas industrias y máquinas. A diferencia de las computadoras de propósito general, el LOGO! está diseñado para múltiples señales de entrada y de salida, rangos de temperatura ampliados, inmunidad al ruido eléctrico y resistencia a la vibración y al impacto. Los programas para el control de funcionamiento de la máquina se suelen almacenar en baterías copia de seguridad o en memorias no volátiles. Un PLC es un ejemplo de un sistema de tiempo real, donde los resultados de salida deben ser producidos en respuesta a las condiciones de entrada dentro de un tiempo limitado, de lo contrario no producirá el resultado deseado. En la siguiente figura podemos observar la estructura de PLC tentativo a emplear: Mediante este controlador, manipularemos el giro del motor, debido a que es necesario que este sea reversible. El motor será accionado por medio de una señal de radiofrecuencia proporcionada por el usuario mediante un control remoto. Se contará con un sensor, el cual brindará la seguridad de que la valla no descienda mientras esté un carro debajo de esta y la vez proporcionará una señal que indicará a la valla que después de un cierto lapso de tiempo de no censar algún carro descienda. INTERRUPTOR FINAL CARRERA 20mm LS20M41B11-P01

8
Contactor ABB (11 Amperes) Un contactor es un componente Electromecaníco que tiene por objetivo establecer o interrumpir el paso de corriente, ya sea en el circuito de potencia o en el circuito de mando, tan pronto se dé tensión a la bobina (en el caso de ser contactores instantáneos). Un contactor es un dispositivo con capacidad de cortar la corriente eléctrica de un receptor o instalación, con la posibilidad de ser accionado a distancia, que tiene dos posiciones de funcionamiento: una estable o de reposo, cuando no recibe acción alguna por parte del circuito de mando, y otra inestable, cuando actúa dicha acción. Este tipo de funcionamiento se llama de "todo o nada". En los esquemas eléctricos, su simbología se establece con las letras KM seguidas de un número de orden.
Variador de frecuencia SINAMICS V20.
Convertidor de rendimiento básico compacto SINAMICS V20. SINAMICS V20 se
distingue como resultado de sus tiempos de puesta en marcha rápida, facilidad de uso,
robusto y eficiencia de costos, para conexión de red monofásica monofásica de 230 V.
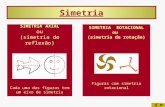
Un variador de frecuencia es un sistema para el control de la velocidad rotacional de un
motor de corriente alterna por medio del control de la frecuencia de alimentación
suministrada al motor. Un variador de frecuencia es un caso especial de un variador de
velocidad
Los variadores de frecuencia son también conocidos como drivers de frecuencia ajustable
(AFD), drivers de CA, microdrivers o inversores. Dado que el voltaje es variado a la vez
que la frecuencia, a veces son llamados drivers VVVF (variador de voltaje variador de
frecuencia).

9
Los dispositivos variadores de frecuencia operan bajo el principio de que la velocidad
síncrona de un motor de corriente alterna(CA) está determinada por la frecuencia de AC
suministrada y el número de polos en el estator, de acuerdo con la relación:
2.2. MARCO CONCEPTUAL
El sistema pretende tener el control del acceso al estacionamiento vehicular mediante la tecnología de radiofrecuencia, la cual brinda más seguridad. El control de acceso al estacionamiento se hará por medio de los controles remotos de tecnología RF que se le proporcionara al personal de la Facultad de Ingeniería Culiacán, donde la función del sensor será detectar la presencia del automóvil en la misma línea de acción donde se encuentra la valla, y la pluma no bajara si detecta la presencia de un automóvil, garantizando la seguridad en la operación del sistema tomando en consideración la orden para el descenso de la valla articulada mediante la radiofrecuencia.

10
Existen soluciones controladas electrónicamente que organizan el acceso de las personas autorizadas a recintos de seguridad relevante. Para ello están especialmente pensados para su segura delimitación perimetral. Con el control por radio frecuencia se regula el acceso sin necesidad de supervisión con respecto a la individualización del paso en el sentido deseado.
3. CAPITULO ||| (PROPUESTA)
3.1. Localización óptima del sistema
A continuación, se muestran algunas fotografías del espacio donde se desea colocar la pluma

11
3.2. Determinación del tamaño óptimo del sistema
A continuación se muestra un diseño de la pluma a implementar, atendiendo a las especificaciones de las dimensiones del lugar en el cual esta se encontrara ubicada y ésta realizará la función de control de acceso. UNIDADES: Metros (m)

12
3.3. Estudio de operación
A continuación se describen el equipo del cual estará provisto el sistema de la pluma
articulada, una pequeña explicación de lo que estos son y qué operación realizaran en el
funcionamiento del sistema.
3.4. Descripción del sistema
El sistema de barrera automatizada propuesto en este escrito cuenta con elementos que
son necesarios para llevar a cabo de manera correcta la tarea de administrar un
estacionamiento, estos son enumerados a continuación.
1. Gabinete de la pluma. 2. Sistema RF para acceso a usuarios. 3. Barrera articulada que delimita el espacio de acceso.
componentes eléctricos y electrónicos 1. Sensores para la detección de presencia de un automóvil.
2. Modulo lógico LOGO!
3. Focos indicadores
4. Interruptores
5. Motor reductor
6. Variador de frecuencia
3.5. Elección de componentes eléctricos
Calibre del alimentador
El calibre del alimentador para un motor se calcula de la siguiente manera:

13
Calibre conductor THWN
Selección de contactor. Clasificación de contactores y arrancadores según nema

14
3.6. Elección de componentes mecánicos y material de estructura
Acero SAE 1045
SI
Esfuerzo de tracción máximo
Esfuerzo cortante máximo
Planteando la 1er condición de equilibrio estático en la dirección vertical:
Planteando la 2da condición de equilibrio:
TORQUE
Es un eje hueco el de la salida de la transmisión, con un diámetro interior de 1 in.

15
Espesor del eje hueco
Cálculo del esfuerzo cortante mínimo correspondiente al diámetro interior del eje hueco del motor
(que es donde se inserta el eje del mecanismo)
Sustituyendo:

16
Cálculo del esfuerzo cortante máximo correspondiente al diámetro exterior del eje hueco del motor
TENGO 3 INCOGNITAS R, F1 Y F2 Y SOLO DOS ECUACIONES;
APARTE AQUÍ NO ESTOY PONIENDO EL CONTRAPESO
Determinación del Factor de seguridad
Con respecto al esfuerzo cortante:
Cálculo del esfuerzo de aplastamiento en el soporte

17
Cálculo del esfuerzo cortante en los tornillos del soporte
Se trata de un esfuerzo cortante doble
Siendo lo mismo en el tornillo #2
Cálculo del cople del eje de las chumaceras al soporte

18
Esta es una ecuación de 4to grado la cual se debe de resolver para encontrar el valor de :
FALTA EL CALOR DE Y PARA ESTE FALTA A SU VEZ EL VALOR DE T
COMO CALCULAR T PARA LA VALLA ARTICULADA
FLEXIÓN
El momento de inercia equivalentes igual al momento de inercia del octágono exterior (solido)
menos el octágono interior (solido).
Se trata de una flexión positiva, ya que la cara interior es la que se comprime y la cara exterior es
la que se tensa.
3.7. Características técnicas de los componentes seleccionados
MOTOR DE INDUCCIÓN TRIFASICO
HP 1/4 P 4 TYPE TC-FX
VOLTTS 230 460 FRAME V-63M HZ 60 60 INS.CLASS F AMP 1.12 1,56 TIME RAATING CONT. RPM 1730 1730 SERVICE FACTOR 1.15 CODE K K MAX. AMB 40°C USABLE 208 V 1.09 AMP FACTORY SHV-01 SERIAL NO. VS-F1

19
3.8. Estructura de la máquina

20
3.9. Diagrama eléctrico

21
Diagrama de conexiones para el variador de frecuencia SINAMICS V20

22
Macro de conexión: Control desde los bornes (Variador de frecuencia)

23
3.10. Código del programa de control de modulo lógico LOGO!
El programa está elaborado en lenguaje en bloques

24
CONCLUSIONES
Después de haber realizado y analizado los diversos puntos de nuestra propuesta,
podemos observar que al implementar dicho proyecto obtendremos diversos beneficios
entre los cuales se encuentran el proteger de accesos no autorizados correspondientes a
personas externas a la institución, conseguir una imagen de institución moderna y
actualizada, al igual que evitar el retraso de docentes a clases por búsqueda de
estacionamiento.
Se busca no solo encontrar solución al área de oportunidad de la Facultad si no hacerlo
de la manera más factible, siendo nuestro diseño el que reúne las características de
operación más destacable de diversos prototipos analizados con anterioridad, tanto en el
aspecto estructural, mecánico, eléctrico, y electrónico integrados en nuestro diseño.
Enfocados en el aspecto económico podemos recalcar que la propuesta conlleva una
inversión estimada recuperable a corto plazo, fundamentando este argumento en el
análisis realizado en el estudio de viabilidad, dejándose así recursos disponibles para su
reinversión en la institución académica.
El amortiguamiento como factor para el diseño
La amortiguación o amortiguamiento se define como la capacidad de un sistema o cuerpo
para disipar energía cinética en otro tipo de energía. El amortiguamiento es un parámetro
fundamental en el campo de las vibraciones, fundamental en el desarrollo de modelos
matemáticos que permiten el estudio y análisis de sistemas vibratorios, como lo son:
estructuras metálicas, motores, maquinaria rotativa, turbinas, automóviles, etc. Esto va
encaminado a la teoría de que todo sistema vibratorio (regularmente sistemas mecánicos)
tiene la capacidad de disipar energía. Para el control de vibraciones e impactos en
maquinaria, se utiliza el concepto de amortiguamiento como una técnica para disipar
energía del sistema, manipulando así la amplitud de vibración en el sistema y otros
parámetros de estudio.
El amortiguamiento del mecanismo de una pluma automatizada de estacionamiento es
uno de los factores de mayor trascendencia para su diseño y uso, ya que fue posible
observar en diversos lugares los cuales están provistos de un sistema de pluma
automatizada como es que la valla experimenta una vibración al momento de llegar a sus
posiciones limite (a 0 y 90°) sometiendo a ésta a grandes esfuerzos pudiéndose observar
su efecto su progresiva flexión; así el amortiguamiento es la forma a través de la cual se
le dota al mecanismo la posibilidad de estar disipando energía con la finalidad de que el
sistema mecánico opere de forma correcta, sin estar sometido a vibraciones que afecten
su desempeño y que en determinado momento puede llevar ocasionar fallas en mayor o
menor medida
Lo anteriormente mencionado fue uno de los aspectos al que se le tomo mayor
relevancia al momento de investigar los diversos mecanismos y diseños de plumas
automatizadas de estacionamiento existentes, buscándose así implementar el
mecanismo más adecuado y factible para dar solución a este problema de operación,
encontrándose con ello el mecanismo de una valla articulada, el cual es un mecanismo
enfocado a dar solución a este problema, siendo con ello totalmente innovador, ya que la
valla consta de una serie de eslabones los cuales permiten tener un mecanismo que se

25
extiende o se retrae, en función de bloque o acceso a la zona de parque vehicular, siendo
esto lo que le provee un amortiguamiento evitando la vibración, aunado a que los
extremos inferiores de los eslabones mayores están provistos de caucho de forma que al
momento de que se dé el contacto de dichos eslabones por la retracción de la valla halla
una almohadilla elástica que evite el golpe entre los eslabones.
Argumentando las innovaciones ya plasmadas referentes a la estructura, destacaremos
que el diseño planteado no se encuentra comúnmente en nuestra ciudad, siendo así la
primera Facultad en la Universidad Autónoma de Sinaloa en tener este diseño en sus
instalaciones.

26
RECOMENDACIONES Al utilizar un aparato eléctrico, el usuario debe seguir ciertas reglas básicas para su seguridad, dichas características son enumeradas posteriormente:
1. Como ya se dijo anteriormente debe leer detenidamente las instrucciones de uso antes de usar la barrera automatizada.
2. Para que no se presente el riesgo de cortocircuito, evite siempre el contacto de cualquier cable, clavija o elemento eléctrico con cualquier líquido y verificar que la caja de control está completamente cerrada y que en caso de lluvia esta agua ni entraría al interior de la caja. 4. Desenchufar el aparato antes de limpiarlo o cuando no esté en uso. 5. No haga funcionar nunca el aparato con el enchufe o el cable dañado, o después que el mismo hubiera funcionado mal o haya sido dañado de alguna forma. 6. En caso de algún problema lleve el aparato a un Servicio Técnico Autorizado o a quien se le atribuye el diseño e instalación de la valla. 7. El uso de accesorios que no sean originales pueden perjudicar su funcionamiento y causar daños a la persona y a la valla de estacionamiento, 8. Evite que el cable de la maquina cuelgue o toque superficies con altas temperaturas. 9. Para desconectar, todas las funciones deben estar en la posición de OFF. 10. Durante su uso deberá pasar un automóvil a la vez. 11. Hay que ser extremadamente cuidadosos. 12. No desconecte nunca el enchufe tirando del cable. 13. El aparato estará encendido permanente. 14. Nunca retirar cualquier elemento de la caja de control mientras la barrera este funcionando.
INSTRUCCIONES DE USO
Para poder empezar a utilizar este equipo se tiene que seguir las siguientes instrucciones, ya que de no ser así, podría haber algún mal uso de este, y no funcionaria de la mejor manera.
1. Encender equipo; para que cualquier aparato eléctrico comience a trabajar requiere esté conectado a una fuente de alimentación, en este caso a una toma de corriente bifásica 220v.
2. Colocar el eje de la transmisión es decir la barrera, en posición de inicio (cerrada)
para encender el sistema e iniciar con su funcionamiento, podría existir algún problema de no ser así, ya que el mecanismo del motor no terminaría su ciclo correctamente.
3. El usuario deberá de respetar la señal indicadora de los focos rojo y verde, y
presentado el momento de que el foco rojo enciende y apague como intermitente, significa que no hay espacios disponibles en el estacionamiento, el usuario no podrá entrar al estacionamiento hasta esperar a que salga al menos un automóvil para tomar su lugar.

27
4. Si el indicador muestra una luz roja, significa que puede presionar el botón A de su
control para acceder, ya que si hay espacios disponibles. 5. Mientras la barrera este subiendo no pase, hasta que la barrera llegue a 90° su
punto máximo y que pueda acceder.
6. Coloque el automóvil a 2 m aproximadamente de la barrera, posteriormente presionar el botón de subida del control esperé la luz verde del indicador y acceda al estacionamiento.
7. Asegúrese de presionar el botón A nuevamente para el descenso una vez que ya
no se encuentre en la línea de detección del sensor, ya que si presiona el botón estando en la línea de uno de los sensores, la barrera no bajará, por su seguridad.
8. Una vez que ha entrado, el automóvil pasará por el sensor 2, y deberá presionar el
botón de bajada de la barra.
9. En dado caso de que el usuario haya olvidado bajar la barrera, esta bajará automáticamente a los 10 segundos después de no detectar presencia en ninguno de los dos sensores
10. Asegúrese de presionar el botón de bajada hasta que haya pasado por el sensor
2, de lo contrario la barrera no bajará, quedaría abierto el acceso al estacionamiento.
11. El caso de que la barrera se encuentre abierta, esperé a que cierre y el programa
termine su ciclo, para evitar posibles daños a su automóvil, evitando que la barrera caiga sobre él.
12. Puede entrar solamente un automóvil a la vez, para evitar daños a su automóvil,
ya que al tratar de pasar dos juntos podría dañarse, ya sea porque barrera caiga sobre él, o dañe los soportes de los sensores.
Es de suma importancia, que el control solamente sea utilizado por personal que accede
en automóvil al estacionamiento de la institución, por ningún motivo se use este acceso
para entrar como peatón, pues esto haría que nuestro valor de espacios disponibles
disminuyera, pues el programa contaría a la persona y restaría un espacio.

28
BIBLIOGRAFÍA