unesp UNIVERSIDADE ESTADUAL PAULISTAmreiss/Fotogrametria_I/2017-1/Material... · FCT - FACULDADE DE...
34
unesp UNIVERSIDADE ESTADUAL PAULISTA FCT - FACULDADE DE CIENCIAS E TECNOLOGIA Departamento de Cartografia FOTOGRAMETRIA II Notas de Aulas “RESTITUIÇÃO FOTOGRAMÉTRICA (ANALÍTICA/DIGITAL): Teoria das Orientações - Orientação Exterior” Prof. Júlio Kiyoshi Hasegawa Presidente Prudente Setembro de 2004
Transcript of unesp UNIVERSIDADE ESTADUAL PAULISTAmreiss/Fotogrametria_I/2017-1/Material... · FCT - FACULDADE DE...

unesp UNIVERSIDADE ESTADUAL PAULISTA FCT - FACULDADE DE CIENCIAS E TECNOLOGIA
Departamento de Cartografia
FOTOGRAMETRIA II Notas de Aulas
“RESTITUIÇÃO FOTOGRAMÉTRICA (ANALÍTICA/DIGITAL): Teoria das Orientações - Orientação Exterior”
Prof. Júlio Kiyoshi Hasegawa
Presidente Prudente Setembro de 2004

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
1
Sumário
1. Restituição Analítica (numérica) ......................................................................................2 2. Restituição analítica Seqüencial ......................................................................................2
2.1. Orientação relativa................................................................................................................. 3 2.1.1. Orientação relativa com equação de coplanaridade....................................................... 6 2.1.2. Orientação relativa com as equações de colinearidade ................................................. 8
2.2. Determinação das coordenadas dos pontos do modelo...................................................... 10 2.3. Orientação Absoluta ............................................................................................................ 10
2.3.1. Orientação Absoluta com transformação Isogonal ....................................................... 11 2.3.2. Orientação Absoluta com transformação Afim.............................................................. 12
2.4. Fluxograma das Etapas da Orientação Seqüencial............................................................. 13 3. Restituição Analítica com Orientação Exterior das duas fotos.......................................16
3.1. Orientação Exterior com Injunções Absolutas ..................................................................... 16 3.2. Orientação Exterior com Injunções relativas........................................................................ 17 3.3. Fluxogramas dos procedimentos de orientação do par de fotos. ....................................... 18
4. Orientação Exterior de uma foto – Resseção Espacial..................................................19 4.1 Fluxogramas dos procedimentos de orientação do par de fotos isoladamente.................... 20
5. Determinação das coordenadas dos pontos..................................................................21 5.1 Interseção Espacial dos raios homólogos............................................................................. 21 5.2 Interseção com as equações de colinearidade..................................................................... 22
6. Restituição Analítica Simultânea ...................................................................................23 7. Restituição analítica com fotos não métricas.................................................................26
7.1. A Transformação Linear Direta (DLT).................................................................................. 26 7.2. Restituição com a DLT......................................................................................................... 27
Apêndice A ........................................................................................................................29 A.1. Resolução das equações de colinearidade pelo método paramétrico ................................ 29
7. Referências Bibliográficas .............................................................................................33

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
2
1. Restituição Analítica (numérica) A restituição é um processo de transformação do sistema de projeção central
(cônica) para ortogonal (mapa). Assim, para elaborar um mapa (digital), ou ainda,
determinar as coordenadas dos pontos fotogrametricamente, deve-se formar um modelo
tridimensional do objeto imageado, no modo analógico um estereomodelo, no modo
analítico (matemático) modelo numérico do terreno.
O processo de restituição fotogramétrica necessita, obrigatoriamente, dos
elementos de orientação exterior da câmara, cujos valores podem ser determinados por
métodos diretos ou indiretos:
a) no método direto os elementos de orientação exterior são obtidos durante a
execução do vôo, integrando-se sensores de posicionamento (GPS) e de
orientação angular (Sistema Inercial) ao sistema de captura das câmaras.
b) No método indireto os elementos de orientação são determinados por algum tipo
de processamento. Esses elementos (orientação exterior), no processamento,
definido como parâmetros incógnitos, geralmente, são determinados pelo
Método dos Mínimos Quadrados (MMQ).
Basicamente quatro procedimentos de orientação do modelo, no modo analítico,
podem ser realizados: restituição analítica seqüencial, restituição analítica com orientação
exterior das duas fotos, restituição analítica com orientação exterior das fotos isoladas e
restituição analítica simultânea.
2. Restituição analítica Seqüencial Este procedimento simula analiticamente as mesmas etapas do analógico, ou seja,
executa a orientação relativa e a absoluta analiticamente. Para tanto, as etapas
apresentadas abaixo devem ser realizadas:
- Orientação relativa, utilizando-se das equações de colinearidade ou coplanaridade;
- determinação das coordenadas do modelo (dependendo da forma de orientação
relativa);
- Orientação absoluta utilizando-se, geralmente, do modelo matemático de
transformação isogonal ou afim no espaço 3D; e
- Determinação das coordenadas dos pontos (aplicando a transformação inversa)
das feições restituídas.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
3
A Figura 2.01 apresenta as etapas utilizadas no processo de restituição analítica
seqüencial.
Figura 2.01: Etapas de uma restituição analítica seqüencial.
2.1. Orientação relativa No processo de orientação relativa determinam-se os elementos de orientação
relativa que relacionam os sistemas de coordenadas fotográficas das duas fotos
consecutivas ao sistema de coordenadas arbitrárias, cujos resultados são as coordenadas
dos pontos (3D).
Com superposição suficiente (mínimo de 50%) é possível determinar os elementos
de orientação relativa sem a necessidade de informação externa (pontos de apoio), isto
Restituição Fotogramétrica Sequencial
Leitura das Coordenadas
Orientação Interior.Correção dos Erros Sistemáticos.
Dados Auxiliares
Orientação Relativa. Formação do ModeloEsterescópico.
Orientação Absoluta Transformação do Modelo para o Terreno
Coordenadas: X Y e Z

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
4
se deve ao fato do sistema de coordenadas do modelo ser um sistema arbitrário – que
pode ser definido e realizado conforme a necessidade.
Nesta fase, um modelo tridimensional (modelo estereoscópico) é formado a partir
das duas fotografias sucessivas, cujos valores são determinados a partir do
estabelecimento modelo matemático de colinearidade ou coplanaridade, de um mínimo de
observações (pontos de orientação - Grubber), da definição de um sistema de
coordenadas (arbitrário), do MMQ e de injunções mínimas.
A injunções são colocadas neste caso em alguns elementos de orientação das
câmaras, obedecendo aos mesmos critérios utilizados na definição da rotina de
orientação relativa (analógica). A seguir serão apresentados dois casos dos 50 possíveis.
Caso 1: Quando o sistema coincide com sistema da foto da esquerda (figura 2.02).
X
Y
Z = z'
x"
z"
C' C"
f
bx = cte
P(X Y Z)
y"
x'
y'
bz
by
Figura 2.02: Sistema de coordenadas do modelo solidário ao sistema da foto da esquerda.
Para o desenvolvimento será utilizado uma “aspa” para representar a foto da
esquerda e duas “aspas” par foto da direita.
Essa condição, da figura 1.02, é materializada fixando-se o centro perspectivo da
foto da esquerda, tendo ou não como origem este centro perspectivo. Verifica-se que falta
unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
5
mais uma injunção (fixando a foto da esquerda – 6 injunções), como no caso analógico o
movimento a ser fixado é o “bx”, pois este define a escala que o modelo será formado.
Na prática, fixa-se com um valor arbitrário a coordenada X"c (coordenada X do
centro perspectivo da foto da direita).
Os valores considerados conhecidos são: ω', ϕ', κ', X'c, Y'c, e Z'c para a foto da
esquerda e X"c, da foto da direita.
Assim, a solução consiste em determinar somente os elementos de orientação da
foto da direita (Y"c, Z"c, ω", ϕ" e κ").
Restando, assim, a determinação dos 5 elementos dos doze de orientação que são
necessários para a realização de uma restituição fotogramétrica, pois os setes (07) já
foram arbitrados.
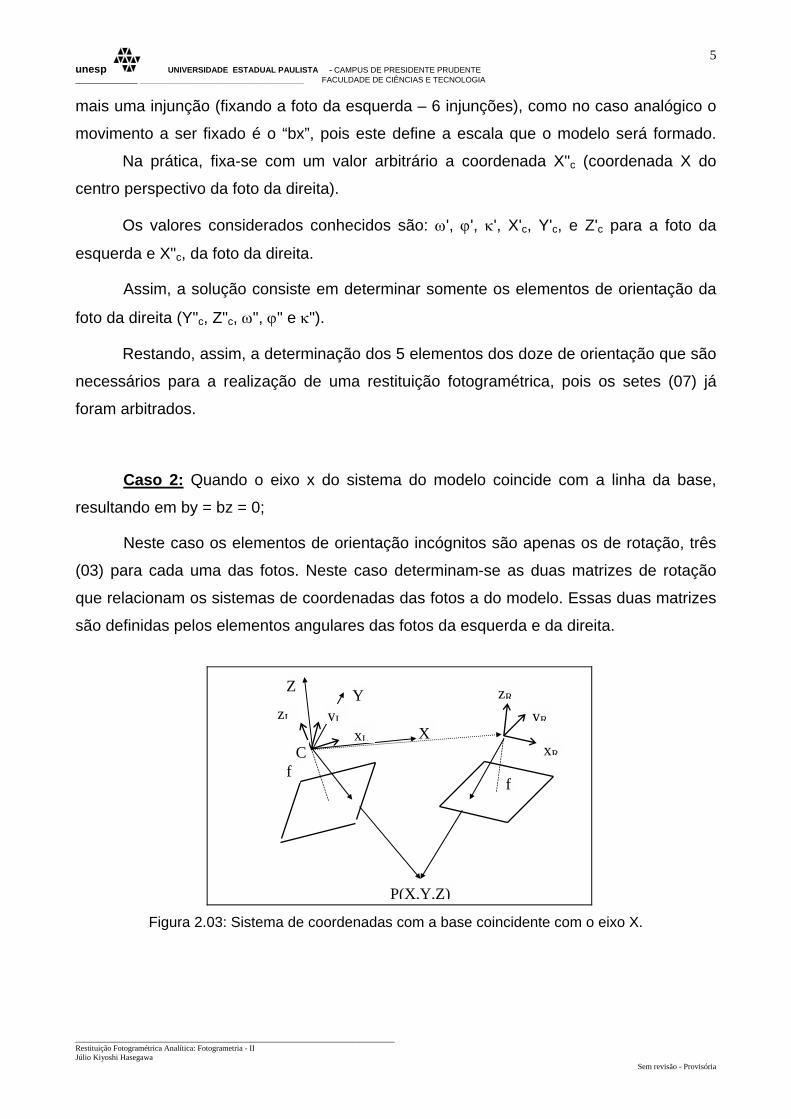
Caso 2: Quando o eixo x do sistema do modelo coincide com a linha da base,
resultando em by = bz = 0;
Neste caso os elementos de orientação incógnitos são apenas os de rotação, três
(03) para cada uma das fotos. Neste caso determinam-se as duas matrizes de rotação
que relacionam os sistemas de coordenadas das fotos a do modelo. Essas duas matrizes
são definidas pelos elementos angulares das fotos da esquerda e da direita.
Figura 2.03: Sistema de coordenadas com a base coincidente com o eixo X.
Z
X
Y
xL
yLzL
f f
xR
yR
zR
P(X,Y,Z)
C

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
6
Os seis (06) elementos de rotação podem ser reduzidos a cinco (05) se considerar
o plano XZ do modelo contendo o eixo CxL, reduzindo-se assim a apenas duas (02)
rotações para a conexão do sistema da foto da esquerda com o sistema do modelo.
Essa condição, na prática, está tornando nulo o movimento angular em torno do
eixo X, isto é ω’ = 0º. Neste procedimento os valores considerados conhecidos, arbitrados,
são: X'c, Y'c, Z'c e ω’ para a foto da esquerda e: X"c, Y"c, e Z"c, da foto da direita.
Na solução da orientação relativa e, conseqüentemente, obtenção dos parâmetros
de orientação, resume-se na determinação dos valores angulares, dois da foto da
esquerda (κ' e ϕ') e os três da foto da direita (ω", ϕ" e κ").
O processo de orientação relativa de modo analítico, tanto no caso 1 como no caso
2, pode ser realizado a partir das duas equações, de coplanaridade (2.01) ou de
colinearidade (2.02) e (2.03).
Equações de coplanaridade:
[ ][ ][ ][ ]
[ ][ ][ ][ ]
[ ][ ][ ][ ] 0)
)((
)
)((
)
)((
´´32
´´22´
´´12
""31
""21´
""11
""32
""22´
""12
´´31
´´21´
´´11
""33
""23´
""13
´´31
´´21´
´´11
´´33
´´23´
´´13
""31
""21´
""11
´´33
´´23´
´´13
""32
""22´
""12
""33
""23´
""13
´´32
´´22´
´´12
=++++
−++++−
+++++
−++++−
+++++
−++++−
pppppp
ppppppec
dc
pppppp
ppppppe
cd
c
pppppp
ppppppec
dc
zmymxmzmymxm
zmymxmzmymxmZZ
zmymxmzmymxm
zmymxmzmymxmYY
zmymxmzmymxm
zmymxmzmymxmXX
(2.01)
Equações de colinearidade:
x fm X X m Y Y m Z Zm X X m Y Y m Z Zp
p c p c p c
p c p c p c
= −− + − + −
− + − + −11 12 13
31 32 33
( ) ( ) ( )( ) ( ) ( )
(2.02)
y fm X X m Y Y m Z Zm X X m Y Y m Z Zp
p c p c p c
p c p c p c
= −− + − + −
− + − + −21 22 23
31 32 33
( ) ( ) ( )( ) ( ) ( )
(2.03)
2.1.1. Orientação relativa com equação de coplanaridade Na equação de coplanaridade (Eq. 1.01) verifica-se que existem doze (12)
parâmetros à determinar: κ ϕ ω κ ϕ ωe e ece
ce
ce d d d
cd
cd
cdX Y Z X Y Z, , , , , , , , , , , . O problema de
orientação relativa requer somente a solução de cinco parâmetros relativos:
( ), ( ), ( ), ( ), ( )κ κ ϕ ϕ ω ωe d e d e dce
cd
ce
cdX X Z Z− − − − − , ou seja, fica a necessidade de
unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
7
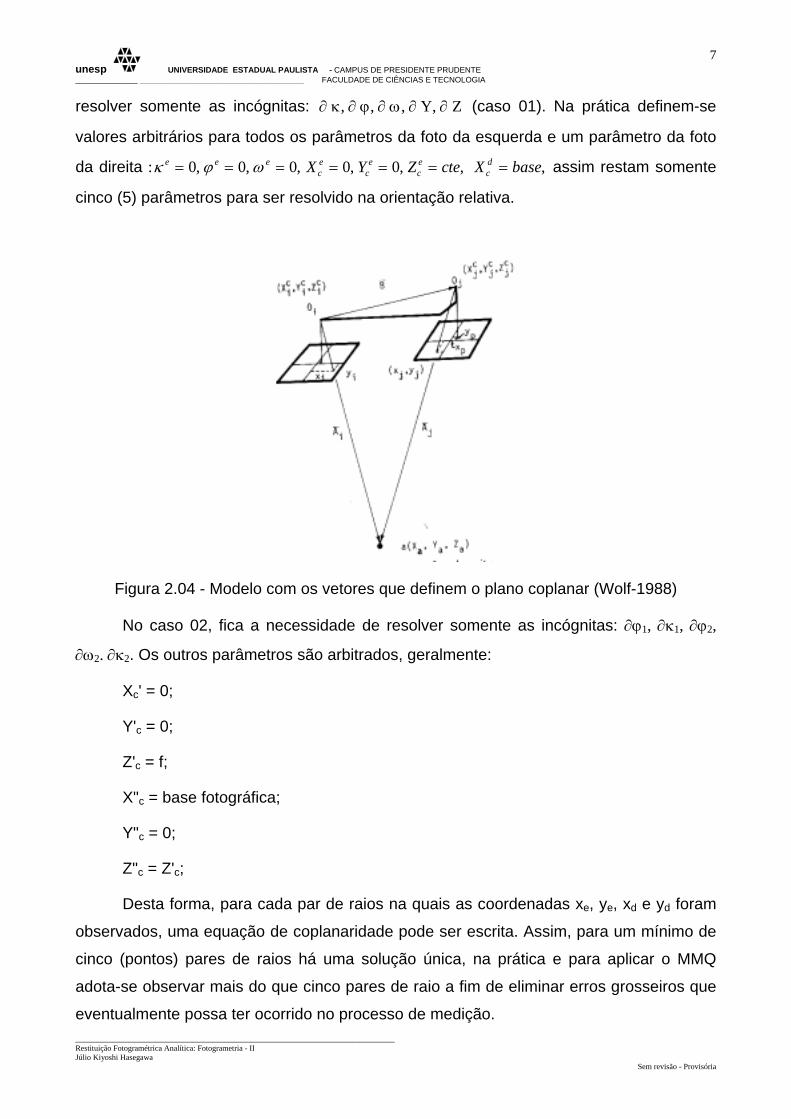
resolver somente as incógnitas: ∂ κ ∂ ϕ ∂ ω ∂ ∂, , , ,Y Z (caso 01). Na prática definem-se
valores arbitrários para todos os parâmetros da foto da esquerda e um parâmetro da foto
da direita :κ ϕ ωe e ece
ce
ce
cdX Y Z cte X base= = = = = = =0 0 0 0 0, , , , , , , assim restam somente
cinco (5) parâmetros para ser resolvido na orientação relativa.
Figura 2.04 - Modelo com os vetores que definem o plano coplanar (Wolf-1988)
No caso 02, fica a necessidade de resolver somente as incógnitas: ∂ϕ1, ∂κ1, ∂ϕ2,
∂ω2. ∂κ2. Os outros parâmetros são arbitrados, geralmente:
Xc' = 0;
Y'c = 0;
Z'c = f;
X"c = base fotográfica;
Y"c = 0;
Z"c = Z'c;
Desta forma, para cada par de raios na quais as coordenadas xe, ye, xd e yd foram
observados, uma equação de coplanaridade pode ser escrita. Assim, para um mínimo de
cinco (pontos) pares de raios há uma solução única, na prática e para aplicar o MMQ
adota-se observar mais do que cinco pares de raio a fim de eliminar erros grosseiros que
eventualmente possa ter ocorrido no processo de medição.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
8
2.1.2. Orientação relativa com as equações de colinearidade A equação de colinearidade representa matematicamente um raio do feixe de raios
que compõe a imagem. Desta forma, aplicando a equação de colinearidade nas duas
imagens adjacentes pode-se reproduzir o modelo analiticamente, por meio de interseções
dos raios homólogos.
Desta forma, o modelo estereoscópico (formado matematicamente) produzido deve
ser referenciado ao sistema de coordenada cartesiana (3D) arbitrária, impondo as
injunções nos parâmetros.
A realização da orientação relativa faz-se determinando somente cinco parâmetros
de forma idêntica ao descrito no item 2.1.1. De forma semelhante ao procedimento
analógico à interseção de no mínimo cinco pares de raios para se realizar a orientação
relativa se faz necessária.
Utilizando dois pares de equações de colinearidade (Eqs. 2.02 e 2.03) verifica-se a
existência de doze (12) parâmetros de orientação à determinar:
κ ϕ ω κ ϕ ωe e ece
ce
ce d d d
cd
cd
cdX Y Z X Y Z, , , , , , , , , , , e três coordenadas (X, Y e Z) do ponto. A
solução deste modelo pode ser obtida através de dois procedimentos, básicos:
a) considerar como parâmetros incógnitos somente cinco elementos de orientação das
câmaras (como no caso da coplanaridade) – caso das injunções absolutas.
- neste caso, cada ponto gera quatro equações nas quais estão inseridos os
cincos (05) elementos de orientação como incógnitas e três (03) coordenadas
dos pontos de orientação (medidos) no sistema de coordenadas do modelo.
Assim, de forma semelhante ao da equação de coplanaridade, verifica-se a
necessidade mínima de 5 pontos para proporcionar solução única e mais de 6
para ser aplicada o MMQ.
Para exemplificar, supondo um modelo com seis pontos observados,
tem-se:
- 05 incógnitas referentes aos parâmetros de orientação;
- 06 x 03 = 18 incógnitas referentes às coordenadas dos pontos no
sistema de coordenadas dos modelos;
- Resultando em 23 incógnitas; e
unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
9
- Como cada ponto gera 4 observações, assim 24 observações são
geradas.
b) adotar um procedimento semelhante ao da orientação analítica simultânea, ou seja,
adotar o mesmo critério descrito anteriormente e considerar todos os pontos a ser
fototriangulado como incógnitas e ajustá-los simultaneamente, condição possível
somente à equação de colinearidade.
Para exemplificar, supondo um modelo com seis pontos observados,
tem-se:
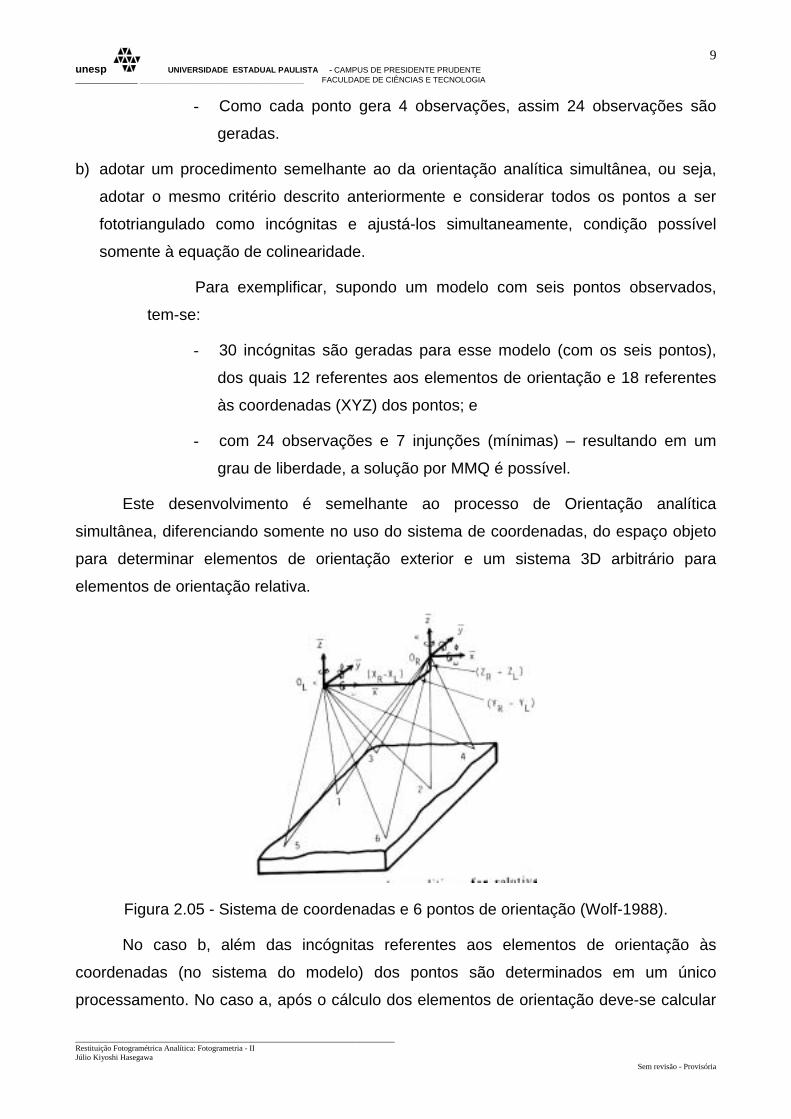
- 30 incógnitas são geradas para esse modelo (com os seis pontos),
dos quais 12 referentes aos elementos de orientação e 18 referentes
às coordenadas (XYZ) dos pontos; e
- com 24 observações e 7 injunções (mínimas) – resultando em um
grau de liberdade, a solução por MMQ é possível.
Este desenvolvimento é semelhante ao processo de Orientação analítica
simultânea, diferenciando somente no uso do sistema de coordenadas, do espaço objeto
para determinar elementos de orientação exterior e um sistema 3D arbitrário para
elementos de orientação relativa.
Figura 2.05 - Sistema de coordenadas e 6 pontos de orientação (Wolf-1988).
No caso b, além das incógnitas referentes aos elementos de orientação às
coordenadas (no sistema do modelo) dos pontos são determinados em um único
processamento. No caso a, após o cálculo dos elementos de orientação deve-se calcular

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
10
as coordenadas do modelo, pois somente os elementos de orientação (relativa) e dos
pontos utilizado como de orientação foram determinados, na qual será analisada no item
2.1.2.
2.2. Determinação das coordenadas dos pontos do modelo Uma vez determinado os parâmetros de orientação (relativa) das fotos, faz-
se necessário à determinação das coordenadas dos pontos do modelo. Este cálculo pode
ser efetuado utilizando-se basicamente os dois procedimentos, descritos nos itens 5.1 e
5.2.
2.3. Orientação Absoluta Terminada a orientação relativa, obtém-se um modelo estereoscópico das imagens
processadas, entretanto, este modelo está num sistema de coordenadas arbitrárias sem
definição de escala e o eixo z não está orientado em relação ao sistema de coordenadas
terrestres utilizadas.
O modelo estereoscópico formado representa perfeitamente a morfologia do
terreno, desta maneira, para validar este modelo como uma representação plani-
altimétrica equivalente ao terreno fotografado faz-se necessário realizar uma
transformação geométrica (Isogonal ou Afim) que sintetiza a Orientação Absoluta.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
11
Figura 2.06 - Modelo arbitrário em relação ao sistema de coordenadas do espaço objeto.
Na orientação relativa forma-se um modelo estereocópico num sistema cartesiano
tridimensional arbitrário, desta forma, as coordenadas fornecidas (pela equação de
colinearidade ou coplanaridade) do modelo devem ser transformadas para o sistema de
coordenadas do espaço objeto (por Ex: Sistema Geodésico Cartesiano). Esta
transformação pode ser realizada pelo modelo matemático Isogonal ou Afim.
2.3.1. Orientação Absoluta com transformação Isogonal O modelo matemático 2.04 descreve matematicamente a relação entre o sistema
do modelo arbitrário e sistema de coordenadas retangulares do espaço objeto:
XYZ
MX XY YZ Z
T
=
−
−
−
−λ 10
0
0
'
'
'
(2.04)

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
12
onde:
X, Y e Z são as coordenadas “observadas” do modelo estereoscópico;
X’, Y’ e Z’ são as coordenadas 3D dos pontos de apoio;
X0, Y0 e Z0 são os parâmetros de translação da transformação;
λ é o fator de escala da transformação; e
M é a matriz de rotação.
A solução da orientação absoluta passa, inicialmente, pela determinação dos
parâmetros (sete) de transformação cuja determinação está condicionada a um mínimo
de pontos, 3 para dar uma solução única e 4 ou mais para MMQ, conhecidos nos dois
sistemas.
A Transformação inversa, necessária para a determinação das coordenadas dos
pontos, no sistema do espaço objeto, pode ser processada manipulando-se o modelo
matemático 1.04, resultando na equação 2.05.
XYZ
MXYZ
XYZ
'
'
'
'
'
'
=
+
λ0
0
0
(2.05)
2.3.2. Orientação Absoluta com transformação Afim Embora este procedimento não seja muito comum para esta aplicação, será
apresentado aqui devido a sua facilidade de solução, pois é um modelo linear.
Diferentemente do caso Isogonal, este modelo não necessita de valores aproximados aos
parâmetros incógnitos.
Modelo matemático:
XYZ
a b cd e fg h i
XYZ
jkl
=
′′′
+
(2.06)

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
13
Transformação Inversa:
XYZ
a b cd e fg h i
X jY kZ l
′′′
=
′−′−′−
−1
(2.07)
Da mesma forma que no caso anterior, deve-se determinar os parâmetros de
transformação (12) pela equação 2.06 e aplicar a transformação inversa (equação 2.07)
para determinar as coordenadas dos pontos no espaço objeto.
2.4. Fluxograma das Etapas da Orientação Seqüencial As etapas dos procedimentos para realizar a orientação do modelo fotogramétrico da forma seqüencial estão sintetizadas na figura 2.07.
As etapas de orientação relativa e absoluta podem ser observadas nas figuras 2.08 e 2.09, respectivamente.
FLUXOGRAMA – ORIENTAÇÃO DO MODELO (SEQUENCIAL)
Orientação Interior
Orientação Relativa Determinação das coordenadas de modelo dos pontos
Orientação Absoluta Determinação das coordenadas 3D no sistema de coordenadas do terreno.
Observação dos pontos
Figura 2.07: Fluxograma das etapas de orientação seqüencial de um modelo estereoscópico.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
14
Leitura dos pontos nas imagens:(x’, y’) e (x”, y”)
Somente ponto de orientação (Gruber)
Valores Iniciais – Matriz de Rotação: Re = I, Rd = I X’c = Y’c = 0, Z’c = f X”c = Y”c = 0, Z”c = f
Equação de Colinearidade: Montagem: Matriz A – Vetor L0 Vetor L = L0 - Lb Matriz P N = (ATPA) U = (ATPL)
Solução de Sistema de equações: X = N-1U Xa = X0 - X
Σ Resíduos < critério
IT < Max. Iter.
IT = 0
IT = IT + 1
Não
Não
Sim
Sim
Fim Problemas
Orientação Relativa concluída.
Leitura de todos os pontos nas duas imagens: (x’, y’) e (x”, y”)
Leitura dos pontos de apoio e os pontos das feições.
Determinar – Coordenadas de todos os pontos do modelo: Xi, Yi, Zi
01
Figura 2.08: Fluxograma das etapas de orientação relativa.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
15
01
Orientação Absoluta: - Transformação Isogonal
o 7 parâmetros de transf.
Valores aproximados p/ os parâmetros Montagem: Matriz A Vetor L = L0 - Lb Matriz P N = (ATPA) U = (ATPL)
Solução de Sistema de equações: X = N-1U Xa = X0 - X
Σ Resíduos < critério
IT < Max. Iter.
IT = 0
IT = IT + 1
Não
Não
Sim
Sim
Fim Problemas
Utilizando coordenadas dos pontos de apoio medidos no modelo e determinados por meios diretos.
Coordenadas dos pontos de apoio:(apoio de campo) No XT YT ZT
Cálculo das coordenadas dos pontos (3D): NT XT YT ZT
Transformação Inversa:
Gravar
Continua -Mais pontoSim Não Fim
Pontos das feições.
Figura 2.09: Fluxograma das etapas de orientação absoluta.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
16
3. Restituição Analítica com Orientação Exterior das duas fotos.
Na restituição analítica o processo de determinação dos elementos de orientação
exterior (ω, φ, κ, Xc, Yc, Zc) de um par de fotografias pode ser realizada anteriormente ao
processo de reconstrução da superfície. Neste caso, um ponto observado no par de fotos
proporcionam 4 equações (duas equações de colinearidade para cada foto), assim, no
mínimo 3 pontos são necessários para se obter as incógnitas envolvidas na determinação
dos 12 elementos de orientação exterior das câmaras. Os modelos matemáticos utilizados
são as equações de colinearidade e o processo dos MMQ é aplicado para estimar os
elementos de orientação exterior.
As injunções podem ser tratadas de duas formas distintas, resultando, numa
alteração do tamanho das matrizes envolvidas no MMQ e na precisão e adequação da
realidade das injunções.
3.1. Orientação Exterior com Injunções Absolutas Neste caso, consideram-se somente os pontos de injunções no processo de
ajustamento pelo MMQ, utilizando as equações de colinearidade, sendo que os
parâmetros incógnitos referentes às coordenadas tridimensionais dos pontos não são
determinados nesta fase, eles são considerados como constantes. As coordenadas dos
pontos de apoio (injunção) são considerados como variáveis conhecidas (não são
parâmetros incógnitos no processo de ajustamento), ou seja, pontos determinados com
altíssima precisão tendo, portanto, variância nula e, conseqüentemente, peso infinito.
Dividindo-se a matriz N (ordem 12 x 12), em 4 sub-matrizes
NN NN N=
11 12
21 22
observa-se que duas delas são nulas N12 e N21. Para determinar os valores das incógnitas
deve-se inverter a matriz N e realizar o produto com o vetor L. Como as sub-matrizes N12
e N21 são nulas pode-se determinar os valores das incógnitas invertendo-se
separadamente as matrizes N11 e N23. Esta forma de solução é a praticada na
determinação da orientação exterior da câmara com uma única foto, procedimento
utilizado na mono-restituição analítica, conhecida como resseção espacial.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
17
3.2. Orientação Exterior com Injunções relativas Este procedimento é semelhante ao da restituição analítica simultânea,
considerando apenas como observação os pontos identificados como injunção. Assim,
este procedimento é computacionalmente mais custoso devido a maior ordem da matriz N
e da condição não nula das sub-matrizes derivadas da matriz N. Entretanto, é um
procedimento mais preciso e com maior flexibilidade de se aplicar outros tipos de
injunções.
A injunções possíveis podem ser:
a) nas coordenadas tridimensionais dos pontos,
b) nos coordenadas altimétricas dos pontos,
c) nas coordenadas planimétricas dos pontos, e
d) nas distâncias entre dois pontos.
Atualmente, com o uso do GPS para a determinação das coordenadas dos pontos
de apoio, as injunções mais comuns aplicadas em fotogrametria, são as do item (a).
A figura 3.01 apresenta o fluxo de operações para determinar os elementos de
orientação exterior das duas fotos, bem como a determinação das coordenadas
tridimensionais dos pontos das feições de interesse.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
18
3.3. Fluxogramas dos procedimentos de orientação do par de fotos.
Leitura dos pontos na imagem: (x’, y’) e (x”, y”)
Equação de Colinearidade: Montagem: Matriz A Vetor L = L0 - Lb Matriz P N = (ATPA) U = (ATPL)
Solução de Sistema de equações: X = N-1U Xa = X0 - X
Σ Resíduos < critério
Cálculo das coordenadas dos pontos (3D): -MMQ -Interseção
IT < Max. Iter.
IT = 0
IT = IT + 1
Somente ponto de apoio
Leitura dos pontos na imagem: (x’, y’) e (x”, y”)
Gravar
Continua -Mais pontoSim Não
Não
Não
Sim
Sim
Fim
Fim Problemas
Pontos das feições.
Elementos de Orientação exterior das duas fotos calculados.
Figura 3.01: Fluxogramas das etapas de orientação exterior com duas fotos e
restituição.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
19
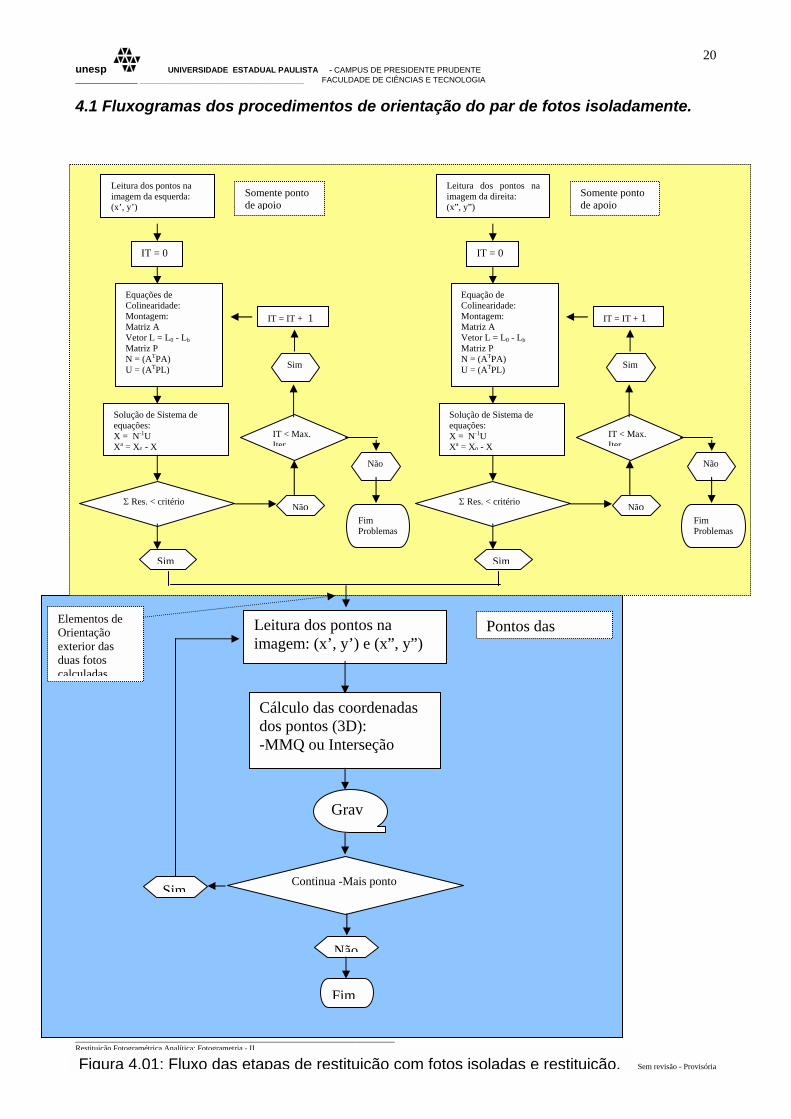
4. Orientação Exterior de uma foto – Resseção Espacial Neste procedimento determina-ser os elementos de orientação exterior das fotos
separadamente – conhecidas como resseção espacial, condicionada a utilização das
injunções tridimensionais dos pontos, tanto no modo absoluto como no relativo.
No caso da restituição é necessário o conhecimento dos elementos de orientação
exterior do par de fotografias que formam o modelo estereoscópico. Lembrando que é
possível determinar os elementos de orientação exterior de uma única foto, desde que
tenha um mínimo de três pontos, não colineares, de apoio. Relembrando que na
restituição (determinação tridimensional das coordenadas das feições) são necessários
pelos menos duas fotos para possibilitar a interseção dos raios homólogos. A figura 4.01
apresenta o fluxo de operações para orientar um para de fotos isoladamente.
O processo de restituição analítica com orientação exterior das fotos isoladas tem
as mesmas características da orientação com o par de fotos, tendo somente o cuidado na
utilização de pontos de apoio com injunção relativa, neste caso, os pontos devem ser de
duplo apoio. Pontos somente planimétricos ou altimétricos provocam uma indefinição,
pois não há interseção de raios homólogos.
Segundo ANDRADE (1998), a orientação exterior permite a recuperação da
posição e atitude de cada foto segundo um referencial terrestre – geralmente aquele no
qual se pretende realizar o trabalho fotogramétrico.
Ainda, segundo ANDRADE (1998), uma fotografia está externamente orientada
(segundo um referencial adotado), quando são conhecidos as três coordenadas Xc, Yc, Zc
do ponto de onde foi tomada (centro perspectivo), bem como os três ângulos que definem
a sua atitude. Esses ângulos, definidos como os ângulos de Euler (ω, φ e χ), representam
rotações que se aplicadas ao sistema terrestre fazem-no coincidir com o fotogramétrico.
A resseção espacial de uma foto consiste em calcular os parâmetros de orientação
exterior da câmara, a partir das:
• fotocoordenadas de n pontos;
• coordenadas de pontos correspondentes no espaço objeto;
• constantes de calibração da câmara;
• valores aproximados dos elementos de orientação exterior.
Na verdade deve-se calcular correções a estes parâmetros, uma vez que já se
dispõe de valores aproximados para os mesmos, segundo LUGNANI (1987).
unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
20
4.1 Fluxogramas dos procedimentos de orientação do par de fotos isoladamente.
Leitura dos pontos na imagem da esquerda: (x’, y’)
Equações de Colinearidade: Montagem: Matriz A Vetor L = L0 - Lb Matriz P N = (ATPA) U = (ATPL)
Solução de Sistema de equações: X = N-1U Xa = X0 - X
Σ Res. < critério
IT < Max. Iter
IT = 0
IT = IT + 1
Somente ponto de apoio
Não
Não
Sim
Sim
Fim Problemas
Leitura dos pontos na imagem da direita: (x”, y”)
Equação de Colinearidade: Montagem: Matriz A Vetor L = L0 - Lb Matriz P N = (ATPA) U = (ATPL)
Solução de Sistema de equações: X = N-1U Xa = X0 - X
Σ Res. < critério
IT < Max. Iter
IT = 0
IT = IT + 1
Somente ponto de apoio
Não
Não
Sim
Sim
Fim Problemas
Cálculo das coordenadas dos pontos (3D): -MMQ ou Interseção
Leitura dos pontos na imagem: (x’, y’) e (x”, y”)
Grav
Continua -Mais ponto Sim
Não
Fim
Pontos das Elementos de Orientação exterior das duas fotos calculadas.
Figura 4.01: Fluxo das etapas de restituição com fotos isoladas e restituição.
unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
21
5. Determinação das coordenadas dos pontos O processo final deste procedimento é a determinação das coordenadas espaciais
dos pontos a serem restituídos, tarefa esta que podem ser realizadas a partir de duas
formas distintas: Interseção Espacial dos raios homólogos ou pela solução das equações
de colinearidade.
5.1 Interseção Espacial dos raios homólogos Conhecendo-se os parâmetros de orientação exterior das câmaras, a posição
espacial de qualquer ponto na área de superposição pode ser calculada a partir das
coordenadas observadas no espaço imagem, reduzidas ao sistema fotogramétrico
(fotográfico), utilizando o modelo matemático descrito a seguir.
Através da equação escrita abaixo,
X - Xc = λ [m11(x - x0) + m21(y - y0) + m31(-f)]
Y - Yc = λ [m12(x - x0) + m22(y - y0) + m32(-f)] (5.01)
Z - Zc = λ [m13(x - x0) + m23(y - y0) + m33(-f)]
Particularizando as equações (5.01) para foto da esquerda,
u1 = m´11(x - x0) + m´
21(y - y0) + m´31(-f)
v1 = m´12(x - x0) + m´
22(y - y0) + m´32(-f) (5.02)
w1 = m´13(x - x0) + m´
23(y - y0) + m´33(-f),
Substituindo as equações 5.02 nas equações 5.01,
X = λ 1 u1 + XC1 ,
Y = λ 1 v1 + YC1 , (5.03)
Z = λ 1 w1 + ZC1 ,
Similarmente para foto da direita,
X = λ 2 u2 + XC2 ,
Y = λ 2 v2 + YC2 , (5.04)
Z = λ 2 w2 + ZC2 ,
Com,
u2 = m”11(x - x0) + m”
21(y - y0) + m”31(-f)
unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
22
v2 = m”12(x - x0) + m”
22(y - y0) + m”32(-f) (5.05)
w2 = m”13(x - x0) + m”
23(y - y0) + m”33(-f),
Manipulando as equações 5.03 e 5.04 os fatores de escalas de cada foto podem
ser determinados, resultando nas equações 5.06 e 5.07.
λ 1 = ( ) ( )X X v Y Y uv u u v
c c c c2 1 2 2 1 2
2 1 2 1
− − −−
(5.06)
λ 2 = ( ) ( )X X v Y Y uv u u v
c c c c2 1 1 2 1 1
2 1 2 1
− − −−
(5.07)
Assim, determinando-se os fatores de escalas, pode-se utilizá-las para calcular as
coordenadas dos pontos, a partir de duas maneiras:
a) substituindo a equação 5.06 nas equações 5.03 e
b) substituindo a equação 5.06 nas equações 5.04.
As coordenadas resultantes serão fornecidas a partir das médias das coordenadas
obtidas pelo procedimento a e b.
5.2 Interseção com as equações de colinearidade Uma vez conhecido os elementos de orientação exterior das câmaras, pode-se
determinar as coordenadas tridimensionais dos pontos no sistema de coordenadas do
espaço objeto. Este cálculo pode ser realizado utilizando-se as equações (1.02 e 1.03) de
colinearidade, agora considerando somente as coordenadas X, Y e Z como incógnitas.
Assim, a determinação das coordenadas dos pontos é realizada resolvendo-se um sistema
com 4 equações a três incógnitas.
)()()(
)()()(´´
33´´
32´´
31
´´13
´´12
´´11´
cpcpcp
cpcpcpp ZZmYYmXXm
ZZmYYmXXmfx
−+−+−
−+−+−−=
)()()(
)()()(´´
33´´
32´´
31
´´23
´´22
´´21´
cpcpcp
cpcpcpp ZZmYYmXXm
ZZmYYmXXmfy
−+−+−
−+−+−−=
)()()(
)()()(""
33""
32""
31
""13
""12
""11"
cpcpcp
cpcpcpp ZZmYYmXXm
ZZmYYmXXmfx
−+−+−
−+−+−−= (5.08)
)()()(
)()()(""
33""
32""
31
""23
""22
""21"
cpcpcp
cpcpcpp ZZmYYmXXm
ZZmYYmXXmfy
−+−+−
−+−+−−=

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
23
6. Restituição Analítica Simultânea Na restituição analítica de modo simultâneo todos os parâmetros são calculados no
mesmo processamento, inclusive as coordenadas dos pontos das feições a serem
restituídas. Dentre os vários procedimentos de restituição analítica, o simultâneo produz
melhores níveis de precisão (em relação ao seqüencial). Basicamente, o processamento
deste método é realizado através do ajustamento dos pares de feixes (imagens) num bloco
de fotografias (semelhante ao procedimento de fototriangulação) envolvendo rotações e
translações de cada feixe. Estes feixes são definidos pelas equações de colinearidade.
Reconstruir a superfície significa determinar as coordenadas X, Y e Z para todos os
pontos de interesse, neste caso representado pelo modelo matemático de colinearidade.
Dado ao princípio do método, necessidade de iterações, valores iniciais confiáveis
aos parâmetros incógnitos são necessários para que o procedimento tenha uma
convergência para o valor esperado e não realize mais iterações do que necessário. Estes
valores podem ser obtidos de várias maneiras. Por exemplo: adotando-se valores nulos
aos elementos de orientação angular (ω e φ) e com o auxílio de uma carta da área, obter
as coordenadas dos CPs, dos pontos a serem restituídos e do parâmetro angular kappa
(κ). Ainda, pode-se determinar os valores aproximados através de um pré-processamento,
que no caso seria uma fototriangulação seqüencial. Estes valores aproximados são muito
importantes, pois deles dependem a convergência e o tempo computacional.
O processo de restituição no modo simultâneo tem um contraponto, grandes
volumes de dados devem ser processados ao mesmo tempo, por exemplo num modelo
com 500 pontos (modelo com poucas feições) deve-se inverter, pelo menos 3 vezes, uma
matriz da ordem de 1512. Além do processamento para inversão deve se acrescentar os
cálculos efetuados na montagem das matrizes e vetores. Desta forma, conforme o
tamanho da matriz, pode-se verificar que o sistema fica carregado podendo até atingir o
limite de memória de processamento ou ficar processando por um tempo muito longo
inviabilizando o procedimento.
Entretanto, uma adaptação desse procedimento pode ser elaborada, adotando o
mesmo procedimento do caso da simultânea, usando somente um ponto da feição a ser
restituída junto com os pontos de controle. Assim, este novo procedimento deverá
processar simultaneamente todos os parâmetros de orientação exterior e as coordenadas
dos pontos (todos de apoio mais um da feição), tantas vezes quanto forem os pontos
medidos.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
24
Utilizando o mesmo exemplo citado anteriormente verifica-se, considerando 5
(cinco) pontos de apoio, que a matriz a ser invertida tem a ordem 30. Agora, este
procedimento deverá ser resolvido pelo MMQ (requerendo iterações) até a convergência
dos parâmetros incógnitos. Ainda, este processamento deverá ser executado 500
(quinhentas) vezes, conforme o número de pontos. O procedimento mesmo tendo vários
processamentos é mais rápido que no caso anterior (número de operações para uma
inversão é n3) e não fica limitado à capacidade de memória do computador.
A figura 6.01 apresenta a seqüência de operações do procedimento de restituição
analítica/digital com orientação exterior simultânea.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
25
Módulo Restituição
Módulo O. E.
Leitura dos pontos de apoio na imagem:(x’, y’) e (x”, y”)
Equação de Colinearidade: Montagem: Matriz A Vetor L = L0 - Lb Matriz P N = (ATPA) U = (ATPL)
Solução de Sistema de equações: X = N-1U Xa = X0 - X
Σ Resíduos < critério
IT < Max. Iter.
IT = 0
IT = IT + 1
Leitura das feições na imagem: (x’, y’) e (x”, y”)
Gravar
Continua -Mais ponto
Não
Não
Não
Sim
Sim
Fim
Fim Problemas
Correção dos erros sistemáticos.
Módulo O. E.: Processa o ponto medido junto com os pontos de apoio.
Sim
Dados para correção dos Erros Sistemáticos
Pontos de apoio
Figura 6.01: Fluxograma das etapas de restituição com orientação exterior
simultânea.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
26
7. Restituição analítica com fotos não métricas
O processo de restituição ou de transformação de sistemas do espaço imagem
para o do objeto, de imagens obtidas com câmaras não métricas (parâmetros de
orientação interior desconhecido), podem ser efetuadas analiticamente por vários
modelos matemáticos. Dentre eles, pode-se destacar dois modelos matemáticos
usualmente utilizados: Transformação Linear Direta (DLT) e equação de colinearidade
com parametrização dos erros sistemáticos (calibração de câmaras).
7.1. A Transformação Linear Direta (DLT)
Este modelo matemático foi desenvolvido na Universidade de Illinois por Abdel-Aziz
e Karara (1974). Desenvolvido para aplicações em fotografias tomadas com câmaras não
métricas, pois estas, geralmente não são equipadas com marcas fiduciais.
A DLT faz a transformação direta das coordenadas de máquina para o sistema de
coordenadas do espaço objeto, eliminando assim passos intermediários de correção dos
erros sistemáticos (orientação interior). Desta forma, neste modelo não se faz necessário
às marcas fiduciais.
O modelo é baseado no seguinte par de equações:
1))((2))(2())((
11109
43212001
20
263
42
210 +++
+++=−−+−++++−+
ZLYLXLLZLYLXL
PxxyyPxxrrkrkrkxxx
(7.01)
1))((2))(2())((
11109
87551002
20
263
42
210 +++
+++=−−+−++++−+
ZLYLXLLZLYLXL
PxxyyPyyrrkrkrkyyy
r2 = (x - x0)2 + (y - y0)2
onde,
x e y são as coordenadas do ponto imagem no sistema do comparador,
x0 e y0 são as coordenadas do ponto principal no sistema de coordenadas do comparador,
k1, k2, k3, P1, P2 são os coeficientes de distorção das lentes,
X, Y e Z são as coordenadas dos pontos imageados no espaço objeto e
L1, L2, ... ,L11 são os 11 parâmetros de transformação incógnitos.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
27
As equações 7.01 são os modelos expandidos que englobam os parâmetros de
refinamentos de imagem (orientação interior). O número de parâmetros levados em
consideração nas equações 7.01 depende do grau de sofisticação desejado na solução.
Baseados em investigações experimentais, Karara e Aziz (1974), concluíram que, para
propósitos práticos, somente o termo K1 necessitaria ser considerado no modelamento
das distorções das lentes e das deformações do filme.
Nos casos testados por Karara e Aziz (1974), nenhum aumento significativo de
precisão foi conseguido incorporando os termos adicionais (k2, k3, P1 e P2), eliminando-se
estes termos nas equações 7.01 e substituindo-se (x -x0) por x´ e (y - y0) por y´ elas
podem ser escritas da seguinte maneira:
1´
11109
432121 +++
+++=+
ZLYLXLLZLYLXL
rkxx
(7.02)
1´
11109
875521 +++
+++=+
ZLYLXLLZLYLXL
rkyy
Observa-se que as equações 7.02 não são lineares, algumas operações
matemáticas são necessárias para torná-las lineares.
Desenvolvendo as equações 7.02 e deixando-a em função das coordenadas de
máquina obtém-se:
x= L1X + L2Y + L3Z + L4 - L9Xx - L10Yx - L11Zx - x’k1r2(L9X + L10Y + L11Z + 1)
(7.03)
y= L5X + L6Y + L7Z + L8 - L9Xx - L10Yx - L11Zx - y’k1r2(L9X + L10Y + L11Z + 1)
Fazendo k’1 = (L9X + L10Y + L11Z + 1)k1, as equações 7.03 podem ser escritas:
x= L1X + L2Y + L3Z + L4 - L9Xx - L10Yx - L11Zx - x’k’1r2
(7.04)
y= L5X + L6Y + L7Z + L8 - L9Xy - L10Yy - L11Zy - y’k’1r2
7.2. Restituição com a DLT
Este modelo matemático foi desenvolvido para ser aplicado em imagens obtidas
por câmaras analógicas não métricas, pois ela dispensa o conhecimento dos elementos

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
28
de orientação interior, desta forma, a transformação é efetuada diretamente do sistema do
instrumento (arbitrário) para o do objeto.
O modelo matemático DLT (equação 7.04) é adotado neste procedimento, onde
doze parâmetros de cada foto são calculados pelo MMQ, usando o método paramétrico
para o ajustamento. Assim, cada ponto com as coordenadas conhecidas no espaço objeto
geram duas equações do tipo 7.04. Portanto, no mínimo 6 (seis) pontos de controle são
necessários para a solução única dos doze parâmetros incógnitos.
Tendo sido calculado os doze parâmetros incógnitos de cada foto (mínimo de
duas), a determinação das coordenadas dos pontos que definem a feição desejada é
calculada pela equação 7.04, de forma semelhante ao utilizado com a equação de
colinearidade, restando apenas como incógnita as coordenadas X, Y e Z dos pontos.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
29
Apêndice A
A.1. Resolução das equações de colinearidade pelo método paramétrico
As equações colinearidade são funções explícitas das observações. Como se pode
observar, no primeiro membro (lado esquerdo), estão as observações e no segundo os
parâmetros (ω, φ, κ, Xc, Yc, Zc, Xp, Yp, Zp). A equação não é linear, havendo a necessidade
da linearização por Série de Taylor, assim iterações devem ser efetuadas. Portanto,
valores aproximados aos parâmetros são requeridos.
Numa restituição de um par de fotografias, considerando que n0 pontos imagens
são observados, têm-se 4n0 observações possíveis. O número de parâmetros depende do
número de pontos no espaço objeto e do número de fotografias. Desta forma o modelo
tem 2 fotos (f = 2), existirão 6f parâmetros incógnitos de orientação exterior e cada ponto
observado, contribuirá com três incógnitas p , resultando na seguinte equação,
u = 6f + 3p (A.01)
n = 4n0 (A.02)
Desta forma, pode-se escrever todas as n funções consideradas na restituição que
podem ser representadas genericamente da seguinte forma,
F(Xa ) = La (A.03)
onde:
La é um vetor (de ordem n) e correspondem aos valores observados ajustados
(coordenadas x e y corrigidas dos erros sistemáticos da imagem);
La = [x1 y1 x2 y2 . . . . . . xn yn ]T.
(A.04)
Xa é um vetor (de ordem u) correspondente as variáveis incógnitas, (coordenadas
dos pontos no espaço objeto e os parâmetros de orientação da câmara),
Xa = [κ1 φ1 ω1 Xc1 Yc
1 Zc1 κ2 φ2 ω2 Xc
2 Yc2 Zc
2 X1 Y1 Z1 X2 Y2 Z2 ............Xp Yp Zp]T. (A.05)
Desta forma, supondo que um modelo a ser restituído tenha 6 pontos de controle
plani-altimétrico e um ponto a ser determinado têm-se os seguintes valores:
u = 12 + 21 = 33 incógnitas e
n = 28 observações.

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
30
O procedimento ainda não está consistente, pois no sistema de equações normais
verifica-se que há um maior número de incógnitas do que observações, condição esta que
deve ser resolvida introduzindo-se as equações de injunções, no mínimo 7 para definir um
referencial.
Para a solução do problema em questão é necessário que se determine a matriz A,
formada pelas derivadas parciais da equação em relação aos parâmetros incógnitos. Cada
linha da matriz A é definida por uma observação, que no caso da restituição correspondem
às equações de colinearidade. O número de linhas e colunas na Matriz A, são dadas pelas
equações (A.01) e (A.02), respectivamente.
Desta forma a quantidade de elementos não nulos de uma linha da matriz A é 9
(nove). Estes elementos correspondem aos 6 parâmetros de orientação exterior e as 3
coordenadas do ponto. Considerando a superabundância de equações é utilizado o método
dos mínimos quadrados para determinação de uma solução única e sua estimativa de erro
(matriz de covariância).
Assim, estando a matriz montada o procedimento se resume em resolver o conjunto
de equações
X = - (AtPA)-1(AtPL),
N = AtPA
(A.06)
U = AtPL,
NX + U = 0.
Relembrando que o método paramétrico consiste basicamente em atribuir valores
iniciais (aproximado) às incógnitas e determinar as correções desses valores iterativamente.
A obtenção do valor final de Xa, é feita iterativamente usando as equações (A.06) e (A.07),
até a convergência (para o critério estabelecido) seja atingida.
X X Xi i i0
10
1= −− − (A.07)
Para a resolução do sistema de equações normais X = -N-1U, verifica-se que a
matriz N é singular, porque o sistema referencial não foi utilizado (definido). Logo a
deficiência de característica é igual a sete. Isto significa que não haverá solução na
álgebra de Cayley. Poderia ser resolvido pela utilização da pseudo-inversa, procedimento

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
31
que não é de corriqueiramente utilizado. A solução para o problema pode ser obtida
somente com o conhecimento prévio de alguns pontos (neste caso coordenadas) da
superfície, que serão introduzidos como injunções, no caso como injunções posicionais.
Genericamente, a injunção pode ser representada em forma matricial pela seguinte
equação:
G X Ra Xa( ) =
(A.08)
onde:
RXa é um vetor (u) contendo os valores dos parâmetros de injunção observados ajustados.
Realizando as mesmas considerações no desenvolvimento do método paramétrico,
obtém-se a equação 4.09
X A PA C PC A PL C PRt t t t= − + +−( ) ( )1 (A.09)
Assim a equação A.09 é o modelo linearizado geral (com injunções) do método
paramétrico para se realizar o processamento com MMQ.
Considerando o caso em que as injunções são definidas por três coordenadas de um
simples ponto Pi, as equações de injunções G(Xa) para as coordenadas podem ser
expressas da seguinte forma:
X XY YZ Z
i i
i i
i i
=
=
=
(A.10)
onde:
X Y Zi i i, , são as coordenadas de injunções do ponto Pi no sistema de coordenadas do
espaço objeto; e
Xi, Yi, Zi são as variáveis incógnitas correspondentes às coordenadas ajustadas do ponto Pi
no sistema de coordenadas do espaço objeto;
a matriz peso P terá a seguinte forma,

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
32
PP
PP
x
y
z
i
i
i
=
0 0
0 0
0 0
onde:
P P PX Y Zi i i, , são os pesos das coordenadas de injunções (inversamente proporcionais às
variâncias).
A matriz C, que é formada pelas derivadas parciais da função injunção em relação aos
parâmetros, os mesmos considerados na formação da matriz A, terá o mesmo número de
colunas da matriz A e terá tantas linhas quanto forem às injunções e no problema em
questão dadas às equações 4.10 terá elementos com valor igual a 1 na posição
correspondente da injunção efetuada e zero em outras posições.
Assim, na matriz N C PCt= os elementos não nulos estarão sobre a diagonal, em
posição correspondente à posição dos parâmetros fixados, e este valor será o peso da
injunção. Da mesma forma o vetor U C PLt= , terá elementos não nulos nas posições
correspondentes aos parâmetros fixos, valor este que será o produto do peso pela diferença
entre os valores ajustados e fixados (injunção).

unesp UNIVERSIDADE ESTADUAL PAULISTA - CAMPUS DE PRESIDENTE PRUDENTE ______________ _____________________________________ FACULDADE DE CIÊNCIAS E TECNOLOGIA
____________________________________________________________ Restituição Fotogramétrica Analítica: Fotogrametria - II Júlio Kiyoshi Hasegawa
Sem revisão - Provisória
33
7. Referências Bibliográficas
ANDRADE, J. B. “Refração Fotogramétrica”, Boletim da Universidade Federal do Paraná, no 24,
1980.
ANDRADE, J. B. e OLIVAS, M. A A, “Calibração de Câmeras Fotogramétricas”, Boletim da
Universidade Federal do Paraná, no 26, 1981
BLACHUT, T.J. AND CHRZANOWSK, A. AND SAASTAMOINEN, J. H. "Urban Surveying and
Mapping". Spring-Verlag, 1979.
HASEGAWA, J. K., "Fototriangulação em linha com Depuração de erros em micro-computador",
Dissertação de Mestrado, 1991.
KRAUS, K. “Photogrammetry” Ferd. Dümmlers Verlag. 397 p. 1993.
MERCHANT, D. C. “Analytical Photogrammetry - Theory and Practice - Parte I”. Ohio State
University. 1979.
MERCHANT, D. C. “Analytical Photogrammetry - Theory and Practice - Parte II”. Ohio State
University. 1979.
MOFFIT, F. H e MIKHAIL, E. M. “Photogrammetry”, Harper & Row, Inc. 1980.
LUGNANI, J. B. “Introdução à Fototriangulação” UFPR. 134 p. Curitba PR. 1987.
SLAMA, C. C. “Manual of Photogrammetry”. ASP - Falls Church. 1980.
OLIVEIRA, C. “Dicionário Cartográfico”, 4a Edição – Rio de Janeiro. IBGE, 1993.
WOLF, P. R. “Elements of Photogrammetry”. McGraw-Hill Book Company 1988.