U.-J. e ork G A. her Buc R. Krei ig D. hael Mic · e ork G A. her Buc R. Krei ig D. hael Mic Ein...
48
Transcript of U.-J. e ork G A. her Buc R. Krei ig D. hael Mic · e ork G A. her Buc R. Krei ig D. hael Mic Ein...

Te hnis he Universit�at Chemnitz
Sonderfors hungsberei h 393
Numeris he Simulation auf massiv parallelen Re hnern
U.-J. G�orke A. Bu her R. Krei�ig D. Mi hael
Ein Beitrag zur L�osung von
Anfangs-Randwert-Problemen
eins hlie�li h der
Materialmodellierung bei �niten
elastis h-plastis hen Verzerrungen
mit Hilfe der FEM
Preprint SFB393/00-09
Abstra t
The non-linear boundary and initial value problem of �nite elasto-plasti defor-
mations is solved using a Total Lagrangean Finite Element des ription. Based on the
lo al rate formulation of the balan e law of linear momentum, the rate formulation
of the prin iple of virtual work is obtained. Introdu ing the shape fun tions of Finite
Elements and their derivatives with respe t to the oordinates, the basi relations
for an in remental Finite Element approa h solving the boundary value problem
are given. The sti�ness matrix for physi ally and geometri ally non-linear problems
ontains the onsistent material matrix and the geometri al sti�ness matrix.
Based on the multipli ative split of the deformation gradient into an elasti and
a plasti part as well as some physi ally and mathemati ally useful assumptions, a
thermodynami ally onsistent deformation law for �nite elasto-plasti deformations
is formulated. The deformation law represents a system of di�erential and algebrai
equations whi h is numeri ally solved using a generalized one-step time integration
method. Consequently, the initial value problem is solved with a lo al Newton pro-
edure. The presented integration method for the deformation law allows a simple
and eÆ ient omputation of the onsistent material matrix.
Some examples of FE- omputations using the experimental ode PMHP on a
parallel omputer are shown.
Key words: Finite Plasti ity; Constitutive Equations; Thermodynami s; Finite
Element Method; Prin iple of Virtual Work; Impli it Integration
MSC odes: 73B05; 75E05; 73G20; 73V05
Preprint-Reihe des Chemnitzer SFB 393
SFB393/00-09 M�arz 2000

Contents
1 Einleitung 3
2 Grundlagen 3
3 Impulserhaltungssatz 4
4 Prinzip der virtuellen Arbeit 8
5 FEM-Stei�gkeitssystem auf der Grundlage einer
Variationsformulierung 13
5.1 FEM-Diskretisierung { Formfunktionen und deren Ableitungen . . . . . . . 13
5.2 FEM-Diskretisierung { Verzerrungs-Vers hiebungs-
Beziehung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.3 FEM-Diskretisierung { lokale und globale Stei�gkeitsbeziehungen . . . . . 22
6 Kinematik �niter elastis h-plastis her Verzerrungen 28
7 Haupts�atze der Thermodynamik 29
8 Annahmen zur Herleitung des Deformationsgesetzes 30
8.1 Additive Zerlegung der Energiefunktion . . . . . . . . . . . . . . . . . . . . 30
8.2 Wahl der Kon�guration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
8.3 Bildung von Tensorinvarianten . . . . . . . . . . . . . . . . . . . . . . . . . 31
8.4 Kovarianzprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
8.5 Konzept der dualen Variablen . . . . . . . . . . . . . . . . . . . . . . . . . 32
9 Ein thermodynamis h konsistentes Deformationsgesetz 33
10 Numeris he Simulation 35
11 Beispiele 38
11.1 Gelo hte S heibe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
11.2 Freies Stau hen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
12 Zusammenfassung und Ausbli k 41

Author's addresses:
Uwe-Jens G�orke
Anke Bu her
Reiner Krei�ig
TU Chemnitz
Institut f�ur Me hanik
D-09107 Chemnitz
e-mail: uj.goerke�mb1.tu- hemnitz.de
e-mail: anke.bu her�mb1.tu- hemnitz.de
e-mail: r.kreissig�mb1.tu- hemnitz.de
http://www.tu- hemnitz.de/sfb393/
Detlef Mi hael
TU Bergakademie Freiberg
Institut f�ur Me hanik und Mas hinenelemente
D-09596 Freiberg
e-mail: detlef.mi hael�mathematik.tu- hemnitz.de
1

2
1 Einleitung
Die vorliegende Arbeit beinhaltet zwei grundlegende Aspekte der L�osung von Anfangs-
Randwert-Problemen mit Hilfe der Finite Elemente Methode. Neben der Darstellung
der Linearisierung des Randwertproblems, aus der das globale FEM-Stei�gkeitssystem
abgeleitet wird, erfolgt die Herleitung eines thermodynamis h konsistenten Deforma-
tionsgesetzes der Elasto-Plastizit�at �niter Verzerrungen, das zur L�osung des eingebetteten
Anfangswertproblems numeris h integriert wird. Die vorgestellten Beziehungen und Ver-
fahren wurden im experimentellen FEM-Programm PMHP realisiert.
2 Grundlagen
Truesdell und Noll [11℄ folgend, stellt der K�orper B eine dreidimensionale, di�erenzierbare
Mannigfaltigkeit dar, dessen Elemente als PartikelX bezei hnet werden. Die der Mannig-
faltigkeit zugeh�origen lokalen Koordinatensysteme vermitteln umkehrbar eindeutige Ab-
bildungenX =X (X
1
; X
2
; X
3
) bzw. X
�
= X
�
(X ) mit � = 1; 2; 3 zwis hen den Partikeln
X und den Tripeln (X
1
; X
2
; X
3
) der rellen Zahlen, die materielle Koordinaten hei�en.
Unter einer beliebigen Kon�guration � des K�orpers B wird ein C
k
-Di�eomorphismus
(k � 1) von B auf ein Gebiet des dreidimensionalen Euklidis hen Raumes verstanden.
x(t) = �(X ; t) ; X (t) = �
�1
(x; t) : (1)
Der Punkt x kennzei hnet dann den vom Partikel X eingenommenen Platz. Sind allge-
meine Koordinaten im Raum gegeben, wobei x
�
mit � = 1; 2; 3 die Koordinaten von x
darstellen, gelten die zu (1) �aquivalenten Glei hungen.
x
�
= �
�
(X
�
; t) ; X
�
=
�
�
�1
�
�
(x
�
; t) (2)
Hier entspre hen die x
�
den r�aumli hen Koordinaten des PartikelsX in der Kon�guration
�.
Eine Kon�guration �
t
zu einem �xierten Zeitpunkt t sei Momentankon�guration mit
x
t
= �
t
(X ) genannt. F�ur die Ausgangskon�guration �
0
zum Zeitpunkt t = 0 gilt
X � �
0
(X ).
Betra htet man ein von di�erentiellen Linienelementen in Ri htung der Basisvektoren der
Koordinatensysteme aufgespanntes Volumenelement, ergeben si h in der Ausgangskon-
�guration
dV
o
=
q
detG
[
dX
1
dX
2
dX
3
(3)
und in der Momentankon�guration
dV =
q
det g
[
dx
1
dx
2
dx
3
(4)
3

mit den kovarianten Metriktensoren G
[
bzw. g
[
. Wird der
�
Ubergang von der Ausgangs-
zur Momentankon�guration mit der Abbildung (2) betra htet, gilt f�ur die Transformation
von Volumendi�erentialen die na hstehende Glei hung:
dx
1
dx
2
dx
3
= det
� �
i
t
� X
I
!
dX
1
dX
2
dX
3
= detF dX
1
dX
2
dX
3
(5)
mit dem Deformationsgradienten F . Aus (3)-(5) folgt eine Beziehung f�ur das Verh�altnis
von di�erentiellen Volumenelementen in der Momentan- und Ausgangskon�guration.
dV
dV
o
=
�
o
�
=
q
det g
[
p
detG
[
detF = J : (6)
In den weiteren Betra htungen wird die kovariante Ableitung a
k
j
i
eines kontravarianten
Vektors a
℄
= a
k
g
k
(Ableitung na h den Koordinaten der Momentankon�guration)
�
�
a
k
g
k
�
� x
i
= a
k
j
i
g
k
=
"
� a
k
� x
i
+ a
l
�
k
li
#
g
k
(7)
mit den Christo�el-Symbolen zweiter Art
�
k
li
= g
k
� g
l
� x
i
=
1
2
g
kj
"
� g
jl
� x
i
+
� g
ji
� x
l
�
� g
li
� x
j
#
: (8)
ben�otigt. Die De�nition kontravarianter Basisvektoren
g
l
g
k
= Æ
l
k
(9)
f�uhrt auf den Zusammenhang zwis hen den Christo�el-Symbolen zweiter Art und den
Ableitungen der kontravarianten Basisvektoren na h den Koordinaten
�
l
ki
= �g
k
� g
l
� x
i
: (10)
3 Impulserhaltungssatz
Werden mit v
℄
die Ges hwindigkeit eines materiellen Punktes, k
℄
die im materiellen Punkt
angreifende Volumenkraft, t
℄
die Ober �a henkraft, n
℄
die Einheitsnormale in Punkten
auf der K�orperober �a he und mit �
℄
der Cau hys he Spannungstensor bezei hnet, dann
ist der Satz von der Erhaltung des Impulses in der Momentankon�guration (r�aumli he
Formulierung) in seiner globalen Form dur h folgende Beziehung de�niert
1
:
d
d t
Z
V
% v
℄
dV =
Z
V
%k
℄
dV +
Z
ÆV
t
℄
(n)
d(ÆV ) =
=
Z
V
%k
℄
dV +
Z
ÆV
h�
℄
;n
℄
i d(ÆV ) : (11)
1
Es gilt h�
℄
;n
℄
i = �
ij
g
jk
n
k
.
4

Na h Anwendung des Satzes von Gau� und Ostrogradski auf das Integral der Ober �a hen-
kr�afte
Z
ÆV
h�
℄
;n
[
i d(ÆV ) =
Z
V
div�
℄
dV (12)
wird (11) in der na hstehenden Art und Weise modi�ziert:
d
d t
Z
V
% v
℄
dV =
Z
V
%k
℄
dV +
Z
V
div�
℄
dV : (13)
Unter Ber�u ksi htigung des Satzes von der Erhaltung der Masse in seiner lokalen For-
mulierung
_% + % divv
℄
= 0 (14)
folgt aus Glei hung (13) na h einigen Umformungen:
Z
V
�
% _v
℄
� %k
℄
� div�
℄
�
dV = 0 : (15)
Da diese Beziehung f�ur jedes beliebige Volumen gilt, ergibt si h unmittelbar der Impulser-
haltungssatz in seiner r�aumli hen lokalen Formulierung zu
% _v
℄
� %k
℄
� div�
℄
= 0 (16)
bzw.
%a
℄
� %k
℄
� div�
℄
= 0 (17)
mit dem Vektor der Bes hleunigung a
℄
. In Koordinatens hreibweise folgt daraus das Dif-
ferentialglei hungssystem
�
ij
j
i
+ %
�
k
j
� a
j
�
= 0 : (18)
Mit den De�nitionen des 1. Piola-Kir hho�s hen Spannungstensors in seiner Koordinaten-
darstellung
P
Ij
= J
�
F
�1
�
I
i
�
ij
(19)
und des 2. Piola-Kir hho�s hen Spannungstensors
T
IJ
= P
Ij
�
F
�1
�
J
j
) P
Ij
= T
IJ
F
j
J
(20)
unter Ber�u ksi htigung von Herleitungen in [9℄ werden die Zusammenh�ange
P
Ij
j
I
=
�
J
�
F
�1
�
I
i
�
ij
�
j
I
= J
�
F
�1
�
I
i
�
ij
j
I
= J
�
F
�1
�
I
i
�
ij
j
k
F
k
I
= J �
ij
j
i
(21)
erhalten. Damit kann die Beziehung (18) unter Verwendung von Zweipunkt- bzw. r�aumli hen
Tensoren dargestellt werden:
P
Ij
j
I
+ %
o
�
k
j
� a
j
�
= 0 (22)
5

bzw.
�
T
IJ
F
j
J
�
j
I
+ %
o
�
k
j
� a
j
�
= 0 : (23)
In der symbolis hen S hreibweise ergeben si h die na hstehenden Glei hungen:
DIVP
℄
+ %
o
�
k
℄
� a
℄
�
= 0 (24)
bzw.
DIV
�
T
℄
F
T
�
+ %
o
�
k
℄
� a
℄
�
= 0 : (25)
Dabei ist zu bemerken, da� alle Vektoren in den Glei hungen (22) und (23) weiterhin auf
Basisvektoren der Momentankon�guration bezogen sind. Die Vektoren der Ober �a hen-
und Volumenkr�afte als au h der Ges hwindigkeit und Bes hleunigung sind als physika-
lis he Gr�o�en origin�ar in der Momentankon�guration de�niert. Ihre Pr�asentation in Vek-
torr�aumen der Ausgangskon�guration ist mittels eines Paralleltransports realisierbar, der
dur h Transformation mit dem Shifter ausgef�uhrt wird. Der Shifter ist ein Zweipunkt-
tensor { seine Koordinaten sind als Skalarprodukte von Basisvektoren der vers hiedenen
Koordinatensysteme de�niert:
G
i
I
= g
i
G
I
;
�
G
�1
�
I
i
= G
I
g
i
: (26)
Bei dieser Transformation bleiben Ri htung und Betrag der Vektoren erhalten.
F�ur die weiteren Darstellungen wird die kovariante Ableitung des Shifters ben�otigt.
Zun�a hst ergeben si h die partiellen Ableitungen seiner Koordinaten na h den Koordi-
naten der Ausgangskon�guration unter Ber�u ksi htigung von (8), (10) und (26) zu
� G
i
I
� X
L
=
� (g
i
G
I
)
� X
L
=
� g
i
� x
l
� x
l
� X
L
G
I
+ g
i
�G
I
� X
L
=
= �g
m
�
i
ml
F
l
L
G
I
+ g
i
G
M
�
M
IL
= �G
m
I
�
i
ml
F
l
L
+ G
i
M
�
M
IL
: (27)
Daraus folgt f�ur die vollst�andige kovariante Ableitung des Shifters na h den Koordinaten
der Ausgangskon�guration
6

� G
i
I
g
i
G
I
� X
L
=
� G
i
I
� X
L
g
i
G
I
+ G
i
I
� g
i
� x
l
� x
l
� X
L
G
I
+ G
i
I
g
i
�G
I
� X
L
=
=
� G
i
I
� X
L
g
i
G
I
+ G
i
I
g
m
�
m
il
F
l
L
G
I
� G
i
I
g
i
G
M
�
I
ML
=
=
"
� G
i
I
� X
L
+ G
m
I
�
i
ml
F
l
L
� G
i
M
�
M
IL
#
g
i
G
I
=
=
h
�G
m
I
�
i
ml
F
l
L
+ G
i
M
�
M
IL
+ G
m
I
�
i
ml
F
l
L
� G
i
M
�
M
IL
i
g
i
G
I
=
= G
i
I
j
L
g
i
G
I
= 0 : (28)
F�ur den Vers hiebungsvektor u
℄
gilt:
u
℄
= u
k
g
k
=
�
G
�1
�
K
k
u
k
G
K
= U
K
G
K
=
= x
k
g
k
� X
K
G
K
=
�
�
G
�1
�
K
k
x
k
� X
K
�
G
K
: (29)
Unter Ber�u ksi htigung von (27) und (29) kann der Deformationsgradient in der na hste-
henden Form dargestellt werden:
F
j
J
=
� x
j
� X
J
=
�
� X
J
h
G
j
K
�
U
K
+ X
K
�i
= G
j
K
�
U
K
j
J
+ Æ
K
J
�
: (30)
Na h Einsetzen der Beziehung (30) in den lokalen Impulserhaltungssatz (23) entsteht unter
Bea htung von (28):
�
T
IJ
F
j
J
�
j
I
+ �
o
�
k
j
� a
j
�
=
=
h
T
IJ
G
j
K
�
U
K
j
J
+ Æ
K
J
�i
j
I
+ �
o
�
k
j
� a
j
�
=
= T
IJ
j
I
G
j
K
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
G
j
K
j
I
�
U
K
j
J
+ Æ
K
J
�
+
+T
IJ
G
j
K
�
U
K
j
J
+ Æ
K
J
�
j
I
+ �
o
�
k
j
� a
j
�
=
= G
j
K
T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
+ G
j
K
T
IJ
U
K
j
JI
+ �
o
�
k
j
� a
j
�
= 0 : (31)
Daraus folgt na h Multiplikation mit den Koordinaten des inversen Shifters (G
�1
)
K
j
7

�
T
IJ
F
j
J
�
j
I
+ �
o
�
k
j
� a
j
�
= T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
U
K
j
JI
+
+ �
o
�
G
�1
�
K
j
�
k
j
� a
j
�
=
= T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
U
K
j
JI
+
+ �
o
�
K
K
� A
K
�
= 0 : (32)
Die Verna hl�assigung der Bes hleunigungsterme f�uhrt auf
T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
U
K
j
JI
+ %
o
K
K
= 0 : (33)
Dur h materielle Di�erentiation entsteht daraus die Ges hwindigkeitsformulierung der Be-
wegungsglei hung in konsequent materieller Bes hreibung
_
T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
j
I
_
U
K
j
J
+
_
T
IJ
U
K
j
JI
+ T
IJ
_
U
K
j
JI
+ %
o
_
K
K
= 0 : (34)
4 Prinzip der virtuellen Arbeit
Gegeben sei die Ausgangskon�guration eines deformierbaren K�orpers mit dem Volumen V
o
und der Ober �a he ÆV
o
. Dieser K�orper soll si h im Glei hgewi ht be�nden, wobei Diskon-
tinuit�aten in den Vers hiebungen und Verzerrungen ni ht ber�u ksi htigt werden. An den
materiellen Punkten des K�orpers greifen spezi�s he Volumenkr�afte mit den Koordinaten
K
K
an, w�ahrend auf dem Teil ÆV
o1
der Ober �a he des K�orpers Ober �a henkr�afte mit den
Koordinaten R
K
und auf dem �ubrigen Teil ÆV
o2
der Ober �a he mit ÆV
o1
[ ÆV
o2
= ÆV
o
Vers hiebungen als Randbedingungen vorges hrieben sind.
F�ur \geri htete" Fl�a henelemente da mit dem Fl�a heninhalt da und dem Normalenein-
heitsvektor n gilt in der Momentankon�guration
da
i
= da n
i
: (35)
Dabei bezei hnen die da
i
die Projektionen von da auf die Koordinaten �a hen und n
i
die
Projektionen von n auf die Normalen dieser Fl�a hen. Zwis hen den geri hteten Fl�a henele-
menten der Ausgangs- und der Momentankon�guration besteht die Nansons he Beziehung
[9℄
da
i
= J
�
F
�1
�
I
i
dA
I
(36)
mit
dA
I
= dAN
I
: (37)
8
Der S hnittkraftvektor ist in der Momentankon�guration unter Ber�u ksi htigung der
Cau hys hen Formel und von (35) dur h die na hstehende De�nition gegeben, wobei t
den Spannungsvektor darstellt:
dF
S
= t da = t
i
da g
i
= �
ij
da n
j
g
i
= �
ij
da
j
g
i
: (38)
In der Ausgangskon�guration lautet der entspre hende Zusammenhang mit dem zu t
parallelen Spannungsvektor T
dF
S
= T dA = T
I
dAG
I
: (39)
Werden die Beziehungen (38) und (39) glei hgesetzt, gilt bei Bea htung von (26), (36) und
(38)
T
I
dA =
�
G
�1
�
I
i
�
ij
da
j
=
�
G
�1
�
I
i
J
�
F
�1
�
J
j
�
ij
N
J
dA : (40)
Damit folgen unter Ber�u ksi htigung der Beziehungen (19), (20) und (30) f�ur die Koordi-
naten des Spannungsvektors in der Ausgangskon�guration
T
I
=
�
G
�1
�
I
i
P
Ji
N
J
=
�
G
�1
�
I
i
T
JK
F
i
K
N
J
= T
JK
�
U
I
j
K
+ Æ
I
K
�
N
J
(41)
bzw. f�ur deren materielle Ableitung
_
T
I
=
h
_
T
JK
U
I
j
K
+
_
T
JI
+ T
JK
_
U
I
j
K
i
N
J
: (42)
Die Beziehungen (41) und (42) gelten ebenfalls f�ur die Darstellung der Randkr�afte R
K
auf
der Teilober �a he ÆV
o1
des K�orpers
T
K
= T
IJ
�
U
K
j
J
+ Æ
K
J
�
N
I
= R
K
(43)
bzw. deren materielle Ableitung
_
R
K
=
h
_
T
IJ
U
K
j
J
+
_
T
IK
+ T
IJ
_
U
K
j
J
i
N
I
: (44)
Das Prinzip der virtuellen Arbeit bes hreibt f�ur Glei hgewi htszust�ande die Glei hheit der
Arbeit der �au�eren und inneren Kr�afte, die diese auf dem Wege einer beliebigen virtuellen
Vers hiebung mit den Koordinaten ÆU
K
, wel he die geometris hen Randbedingungen auf
dem Ober �a henabs hnitt ÆV
o2
erf�ullen, verri hten. Dur h
�
Ubers hieben der Bewegungs-
glei hung (33) mit ÆU und der Integration �uber das gesamte K�orpervolumen sowie der
Ber�u ksi htigung von (43) wird die Beziehung
Z
V
o
h
T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
U
K
j
JI
i
ÆU
K
dV
o
+
+
Z
ÆV
o
h
R
K
� T
IJ
�
U
K
j
J
+ Æ
K
J
�
N
I
i
ÆU
K
d (ÆV
o
) +
+
Z
V
o
%
o
K
K
ÆU
K
dV
o
= 0 (45)
9

erhalten. Unter Verwendung des Satzes von Gau� und Ostrogradski folgt aus (45) mit
Z
ÆV
o
T
IJ
�
U
K
j
J
+ Æ
K
J
�
ÆU
K
N
I
d (ÆV
o
) =
Z
V
o
T
IJ
j
I
�
U
K
j
J
+ Æ
K
J
�
ÆU
K
dV
o
+
+
Z
V
o
T
IJ
U
K
j
JI
ÆU
K
dV
o
+
+
Z
V
o
T
IJ
�
U
K
j
J
+ Æ
K
J
�
(ÆU
K
) j
I
dV
o
(46)
letztli h die neue Darstellung des Prinzips der virtuellen Arbeit:
Z
V
o
T
IJ
�
U
K
j
J
+ Æ
K
J
�
(ÆU
K
) j
I
dV
o
=
Z
ÆV
o
R
K
ÆU
K
d (ÆV
o
) +
Z
V
o
%
o
K
K
ÆU
K
dV
o
: (47)
In analoger Weise l�a�t si h aus (34) und (44) die Ges hwindigkeitsformulierung des Prinzips
der virtuellen Arbeit ableiten:
Z
V
o
h
_
T
IJ
�
U
K
j
J
+ Æ
K
J
�
+ T
IJ
_
U
K
j
J
i �
Æ
_
U
K
�
j
I
dV
o
=
Z
ÆV
o
_
R
K
Æ
_
U
K
d (ÆV
o
) +
+
Z
V
o
%
o
_
K
K
Æ
_
U
K
dV
o
: (48)
Aus der Beziehung f�ur den Greens hen Verzerrungstensor
2E
[
= F
T
g
[
F � G
[
= F
k
K
G
K
g
k
g
ij
g
i
g
j
F
l
L
g
l
G
L
� G
KL
G
K
G
L
(49)
kann unter Ber�u ksi htigung von (30) und der kovarianten Ableitung
U
K
j
L
=
�
G
KM
U
M
�
j
L
= G
KM
U
M
j
L
+ G
KM
j
L
U
M
mit G
KM
j
L
= 0 (50)
gezeigt werden, da� gilt:
2E
KL
= U
K
j
L
+ U
L
j
K
+ U
M
j
K
U
M
j
L
: (51)
Daraus ergeben si h f�ur die materielle Zeitableitung
2
_
E
KL
=
_
U
K
j
L
+
_
U
L
j
K
+
_
U
M
j
K
U
M
j
L
+ U
M
j
K
_
U
M
j
L
(52)
und die Variation des Verzerrungstensors
2 ÆE
KL
= (ÆU
K
) j
L
+ (ÆU
L
) j
K
+
�
ÆU
M
�
j
K
U
M
j
L
+ U
M
j
K
(ÆU
M
) j
L
: (53)
10

Der Integrand auf der linken Seite von (47) kann mit (53) ungeformt werden:
T
IJ
h
U
K
j
J
(ÆU
K
) j
I
+ (ÆU
J
) j
I
i
=
=
1
2
n
T
IJ
h
U
K
j
J
(ÆU
K
) j
I
+ (ÆU
J
) j
I
i
+ T
JI
h
U
K
j
I
(ÆU
K
) j
J
+ (ÆU
I
) j
J
io
=
= T
IJ
1
2
h
(ÆU
I
) j
J
+ (ÆU
J
) j
I
+ U
K
j
J
(ÆU
K
) j
I
+ U
K
j
I
(ÆU
K
) j
J
i
=
= T
IJ
1
2
h
(ÆU
I
) j
J
+ (ÆU
J
) j
I
+ U
K
j
J
(ÆU
K
) j
I
+ U
K
j
I
�
ÆU
K
�
j
J
i
=
= T
IJ
ÆE
IJ
: (54)
Aus (47) entsteht mittels (54) die endg�ultige Form des Prinzips der virtuellen Arbeit:
Z
V
o
T
IJ
ÆE
IJ
dV
o
=
Z
ÆV
o
R
K
ÆU
K
d (ÆV
o
) +
Z
V
o
%
o
K
K
ÆU
K
dV
o
: (55)
Die Variation eines Potentials �(a) als skalare Funktion eines Tensors a ist dur h die
Beziehung
� =
� �
� a
�� Æa (56)
de�niert. Wenn das Deformationsgesetz aus einem Energiepotential abgeleitet werden
kann, wie es z. B. im Fall der thermodynamis h begr�undeten Hyperelastizit�at mit
T
KL
=
� W
� E
KL
(57)
m�ogli h ist, dann gilt f�ur die Variation der Form�anderungsenergie
ÆW =
� W
� E
KL
ÆE
KL
= T
KL
ÆE
KL
: (58)
Unter der Annahme, da� die Ober �a hen- und Volumenkr�afte R
℄
und K
℄
ni ht von den
Vers hiebungen abh�angen, geht das Prinzip der virtuellen Arbeit (55) in das �aquivalente
Prinzip vom station�aren Wert des elastis hen Gesamtpotentials �uber:
Æ�(U ) = Æ
8
>
<
>
:
Z
V
o
� W
� E
KL
E
KL
dV
o
�
Z
ÆV
o
R
K
U
K
d (ÆV
o
) �
Z
V
o
%
o
K
K
U
K
dV
o
9
>
=
>
;
= 0 : (59)
11

Werden analoge
�
Uberlegungen mit einer zu (54) �aquivalenten Beziehung f�ur die Glei hung
(48) dur hgef�uhrt, folgt die Ges hwindigkeitsformulierung des Prinzips der virtuellen Ar-
beit
Z
V
o
h
_
T
IJ
Æ
_
E
IJ
+ T
IJ
_
U
K
j
J
�
Æ
_
U
K
�
j
I
i
dV
o
=
Z
ÆV
o
_
R
K
Æ
_
U
K
d (ÆV
o
) +
+
Z
V
o
%
o
_
K
K
Æ
_
U
K
dV
o
(60)
mit
2 Æ
_
E
IJ
=
�
Æ
_
U
I
�
j
J
+
�
Æ
_
U
J
�
j
I
+
�
Æ
_
U
M
�
j
I
U
M
j
J
+ U
M
j
I
�
Æ
_
U
M
�
j
J
: (61)
Au h diese Formulierung kann auf der Basis analoger Annahmen und S hlu�folgerungen,
wie sie beim Prinzip der virtuellen Arbeit Anwendung fanden, als �aquivalentes Prinzip vom
station�aren Wert der Ges hwindigkeit des Gesamtpotentials angegeben werden:
Æ
_
� = �(
_
U ) = Æ
8
>
<
>
:
Z
V
o
"
d T
IJ
dE
KL
_
E
IJ
_
E
KL
+ T
IJ
_
U
K
j
J
_
U
K
j
I
#
dV
o
�
�
Z
ÆV
o
_
R
K
_
U
K
d (ÆV
o
) �
Z
V
o
%
o
_
K
K
_
U
K
dV
o
9
>
=
>
;
= 0 : (62)
In symbolis her Darstellung lautet die Beziehung (60)
Z
V
o
(
_
T
℄
�� Æ
_
E
[
+ T
℄
��
"
�
GRAD
�
_
U
℄
��
T
�GRAD
�
Æ
_
U
[
�
#)
dV
o
=
=
Z
ÆV
o
_
R
℄
� Æ
_
U
[
d (ÆV
o
) +
Z
V
o
%
o
_
K
℄
� Æ
_
U
[
dV
o
: (63)
Wird die materielle Zeitableitung des 2. Piola-Kir hho�s hen Spannungstensors dur h
_
T
℄
=
dT
℄
dE
[
��
_
E
[
(64)
ersetzt, entstehen
Z
V
o
(
dT
℄
dE
[
��
_
E
[
!
�� Æ
_
E
[
+ T
℄
��
"
�
GRAD
�
_
U
℄
��
T
�GRAD
�
Æ
_
U
[
�
#)
dV
o
=
=
Z
ÆV
o
_
R
℄
� Æ
_
U
[
d (ÆV
o
) +
Z
V
o
%
o
_
K
℄
� Æ
_
U
[
dV
o
(65)
12
bzw.
Z
V
o
"
d T
IJ
dE
KL
_
E
KL
Æ
_
E
IJ
+ T
IJ
_
U
K
j
J
�
Æ
_
U
K
�
j
I
#
dV
o
=
Z
ÆV
o
_
R
K
Æ
_
U
K
d (ÆV
o
) +
+
Z
V
o
%
o
_
K
K
Æ
_
U
K
dV
o
: (66)
Darin verk�orpert dT
℄
=dE
[
die konsistente Materialmatrix, die dur h Ableitung des in der
Zeit diskretisierten Deformationsgesetzes na h dem Verzerrungstensor ermittelt werden
kann.
Die s hwa he Formulierung (62) bzw. ihre �aquivalente Form (66) dient im folgenden Ab-
s hnitt als Grundlage f�ur die Herleitung des inkrementellen FEM-Stei�gkeits-
systems zur Simulation �niter elastis h-plastis her Deformationen.
5 FEM-Stei�gkeitssystem auf der Grundlage einer
Variationsformulierung
Die L�osung von Anfangs-Randwert-Aufgaben der Festk�orperme hanik erfolgt unter der
Nutzung sowohl von Ortsdiskretisierungsverfahren, wie z. B. der Methode der Finiten
Elemente (FEM), als au h von Zeitdiskretisierungsmethoden. Dabei soll im weiteren von
einer inkrementellen Betra htungsweise ausgegangen werden, die si h in geeigneter Form
aus den entspre henden Ges hwindigkeitsformulierungen ableiten l�a�t.
Das Randwertproblem besteht in der L�osung der den Glei hgewi htsbedingungen �aquiva-
lenten Ausdr�u ke (60) und (62) der Ges hwindigkeitsformulierung des Prinzips der virtuellen
Arbeit. Dabei sind die Randwerte der inkrementellen Feldgr�o�en f�ur den Spannungs-
und Vers hiebungszustand zu ber�u ksi htigen. Das Anfangswertproblem bezieht si h auf
die L�osung des Algebro-Di�erentialglei hungssytems (DAE) f�ur das Deformationsgesetz,
wel hes zur Bere hnung der Spannungen, internen Variablen und des plastis hen Multi-
plikators zeitli h diskretisiert wird.
5.1 FEM-Diskretisierung { Formfunktionen und deren Ableitun-
gen
Gegeben sei die Ortsdiskretisierung eines zu untersu henden Kontinuums dur h Finite
Elemente. Die L�osung des Randwertproblems soll in Form der Vers hiebungen in den
13

FE-Knoten vorliegen. Unter Nutzung der Formfunktionen sind damit die Vers hiebungen
innerhalb der Elemente bekannt. Ans hlie�end werden die Verzerrungen aus den Ver-
s hiebungen dur h geometris h motivierte Beziehungen (siehe z. B. (51) ) in den Integra-
tionsst�utzstellen der Elemente ermittelt. Dort sind ebenfalls die Werte f�ur die Spannun-
gen und internen Variablen aus der L�osung des Anfangswertproblems gegeben. Im weit-
eren wird ohne Bes hr�ankung der Allgemeinheit der dreidimensionale Fall in kartesis hen
Koordinaten dargestellt, wobei kovariante Ableitungen auf ihren partiellen Teil reduziert
werden. Damit k�onnen neben 3D-Problemen au h der ebene Verzerrungs- und der ebene
Spannungszustand bes hrieben werden. Ledigli h der axialsymmetris he Fall nimmt wegen
der Verwendung eines Zylinderkoordinatensystems eine gewisse Sonderstellung ein, ohne
da� si h die prinzipielle Vorgehensweise �andert. Alle folgenden Ausf�uhrungen beziehen si h
auf die Verwendung isoparametris her Elemente. Hier werden zur Ermittlung der Funkti-
onswerte von Feldgr�o�en (Vers hiebungen, Verzerrungen et .) die glei hen Formfunktionen
herangezogen wie f�ur die Bere hnung der Elementkoordinaten.
Die weiteren Betra htungen zur Ermittlung der Freiwerte der Formfunktionen werden in
den lokalen Koordianten � = (�
1
; �
2
; �
3
)
T
eines Referenzelementes von einfa her Gestalt im
Bildberei h dur hgef�uhrt. Aus den Knotenkoordinaten
~
X und den f�ur alle Koordinaten-
ri htungen glei hen Formfunktionen N lassen si h die globalen Koordinaten
X = (X
1
; X
2
; X
3
)
T
eines Punktes mit den lokalen Koordinaten � im Element mit nen
Knoten auf der Basis folgender Beziehungen n�aherungsweise bere hnen:
X
1
(�) =
nen
X
J=1
N
J
(�)
~
X
J
1
; analog X
2
; X
3
: (67)
Die dreidimensionale Darstellung ergibt:
X (�) = G(�)
~
X (68)
mit
X (�) =
0
B
B
B
�
X
1
(�
1
; �
2
; �
3
)
X
2
(�
1
; �
2
; �
3
)
X
3
(�
1
; �
2
; �
3
)
1
C
C
C
A
(69)
G(�) =
0
B
B
B
�
N
1
(�) : : : N
nen
(�) 0 : : : 0 0 : : : 0
0 : : : 0 N
1
(�) : : : N
nen
(�) 0 : : : 0
0 : : : 0 0 : : : 0 N
1
(�) : : : N
nen
(�)
1
C
C
C
A
(70)
N
T
(�) =
�
N
1
(�) : : : N
nen
(�)
�
(71)
und
~
X
T
=
�
~
X
1
1
: : :
~
X
nen
1
~
X
1
2
: : :
~
X
nen
2
~
X
1
3
: : :
~
X
nen
3
�
: (72)
14
Wegen des vorausgesetzten isoparametris hen Konzepts der eingesetzten Elemente ent-
steht f�ur den Zusammenhang zwis hen dem Vers hiebungsvektor U = (U
1
; U
2
; U
3
)
T
in
einem beliebigen Punkt des Elementes und den Knotenvers hiebungen
~
U ein analoger
Zusammenhang
U (�) = G(�)
~
U (73)
mit seiner ausges hriebenen Form
0
B
�
U
1
U
2
U
3
1
C
A
=
0
B
�
N
1
: : : N
nen
0 : : : 0 0 : : : 0
0 : : : 0 N
1
: : : N
nen
0 : : : 0
0 : : : 0 0 : : : 0 N
1
: : : N
nen
1
C
A
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
~
U
1
1
.
.
.
~
U
nen
1
~
U
1
2
.
.
.
~
U
nen
2
~
U
1
3
.
.
.
~
U
nen
3
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(74)
F�ur die partiellen Ableitungen einer Vers hiebungskomponente na h den Elementkoordi-
naten gilt:
0
B
B
B
B
B
B
�
� U
1
� �
1
� U
1
� �
2
� U
1
� �
3
1
C
C
C
C
C
C
A
=
0
B
B
B
B
B
B
�
� X
1
� �
1
� X
2
� �
1
� X
3
� �
1
� X
1
� �
2
� X
2
� �
2
� X
3
� �
2
� X
1
� �
3
� X
2
� �
3
� X
3
� �
3
1
C
C
C
C
C
C
A
0
B
B
B
B
B
B
�
� U
1
� X
1
� U
1
� X
2
� U
1
� X
3
1
C
C
C
C
C
C
A
(75)
bzw. in kompakter S hreibweise
� U
1
� �
!
= J (�)
� U
1
�X
!
: (76)
Unter Bea htung von (67) und (71) kann die Jakobi-Matrix J (�) wie folgt dargestellt
werden:
J =
0
B
B
B
B
B
�
N
T
;1
~
X
1
N
T
;1
~
X
2
N
T
;1
~
X
3
N
T
;2
~
X
1
N
T
;2
~
X
2
N
T
;2
~
X
3
N
T
;3
~
X
1
N
T
;3
~
X
2
N
T
;3
~
X
3
1
C
C
C
C
C
A
(77)
mit
N
T
;1
=
�N
T
� �
1
usw. (78)
15

In der ausges hriebenen Form besitzt die Jakobi-Matrix (77) die Struktur
0
B
B
B
�
N
1
;1
~
X
1
1
+ : : : +N
nen
;1
~
X
nen
1
N
1
;1
~
X
1
2
+ : : :+N
nen
;1
~
X
nen
2
N
1
;1
~
X
1
3
+ : : :+N
nen
;1
~
X
nen
3
N
1
;2
~
X
1
1
+ : : : +N
nen
;2
~
X
nen
1
N
1
;2
~
X
1
2
+ : : :+N
nen
;2
~
X
nen
2
N
1
;2
~
X
1
3
+ : : :+N
nen
;2
~
X
nen
3
N
1
;3
~
X
1
1
+ : : : +N
nen
;3
~
X
nen
1
N
1
;3
~
X
1
2
+ : : :+N
nen
;3
~
X
nen
2
N
1
;3
~
X
1
3
+ : : :+N
nen
;3
~
X
nen
3
1
C
C
C
A
: (79)
Die Umstellung von (76) f�uhrt auf
� U
1
�X
!
= J
�1
(�)
� U
1
� �
!
; (80)
wobei die Ableitungen von U
1
na h den Elementkoordinaten aus (67) und (73) erhalten
werden.
� U
1
� �
1
= N
1
;1
~
U
1
1
+ : : : + N
nen
;1
~
U
nen
1
� U
1
� �
2
= N
1
;2
~
U
1
1
+ : : : + N
nen
;2
~
U
nen
1
(81)
� U
1
� �
3
= N
1
;3
~
U
1
1
+ : : : + N
nen
;3
~
U
nen
1
Die verk�urzte Darstellung von (81) f�uhrt auf
� U
1
� �
!
=
0
B
B
B
�
N
T
;1
N
T
;2
N
T
;3
1
C
C
C
A
~
U
1
: (82)
Entspre hend (80) ist die Inverse der Jakobi-Matrix mit der Matrix (N
T
;1
;N
T
;2
;N
T
;3
)
T
laut
(82) zu multiplizieren.
16

J
�1
0
B
B
B
�
N
T
;1
N
T
;2
N
T
;3
1
C
C
C
A
=
0
B
B
B
�
J
�1
11
J
�1
12
J
�1
13
J
�1
21
J
�1
22
J
�1
23
J
�1
31
J
�1
32
J
�1
33
1
C
C
C
A
0
B
B
B
B
�
N
1
;1
: : : N
nen
;1
N
1
;2
: : : N
nen
;2
N
1
;3
: : : N
nen
;3
1
C
C
C
C
A
= (83)
=
0
B
B
B
�
J
�1
11
N
1
;1
+ : : :+ J
�1
13
N
1
;3
: : : J
�1
11
N
nen
;1
+ : : :+ J
�1
13
N
nen
;3
J
�1
21
N
1
;1
+ : : :+ J
�1
23
N
1
;3
: : : J
�1
21
N
nen
;1
+ : : :+ J
�1
23
N
nen
;3
J
�1
31
N
1
;1
+ : : :+ J
�1
33
N
1
;3
: : : J
�1
31
N
nen
;1
+ : : :+ J
�1
33
N
nen
;3
1
C
C
C
A
=(84)
=
0
B
B
B
�
�
N
1
1
: : :
�
N
nen
1
�
N
1
2
: : :
�
N
nen
2
�
N
1
3
: : :
�
N
nen
3
1
C
C
C
A
(85)
S hlie�li h f�uhren (80) und (82) bis (85) auf
0
B
B
B
�
U
1;1
U
1;2
U
1;3
1
C
C
C
A
=
0
B
B
B
�
�
N
1
1
: : :
�
N
nen
1
�
N
1
2
: : :
�
N
nen
2
�
N
1
3
: : :
�
N
nen
3
1
C
C
C
A
0
B
B
B
B
B
�
~
U
1
1
.
.
.
~
U
nen
1
1
C
C
C
C
C
A
(86)
mit
U
1;1
=
� U
1
� X
1
usw. (87)
Die Verallgemeinerung auf das r�aumli he Problem lautet
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
U
1;1
U
1;2
U
1;3
U
2;1
U
2;2
U
2;3
U
3;1
U
3;2
U
3;3
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
=
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
�
N
1
1
: : :
�
N
nen
1
0 : : : 0 0 : : : 0
�
N
1
2
: : :
�
N
nen
2
0 : : : 0 0 : : : 0
�
N
1
3
: : :
�
N
nen
3
0 : : : 0 0 : : : 0
0 : : : 0
�
N
1
1
: : :
�
N
nen
1
0 : : : 0
0 : : : 0
�
N
1
2
: : :
�
N
nen
2
0 : : : 0
0 : : : 0
�
N
1
3
: : :
�
N
nen
3
0 : : : 0
0 : : : 0 0 : : : 0
�
N
1
1
: : :
�
N
nen
1
0 : : : 0 0 : : : 0
�
N
1
2
: : :
�
N
nen
2
0 : : : 0 0 : : : 0
�
N
1
3
: : :
�
N
nen
3
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
~
U
1
1
.
.
.
~
U
nen
1
~
U
1
2
.
.
.
~
U
nen
2
~
U
1
3
.
.
.
~
U
nen
3
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(88)
mit der kompakten Formulierung
U
;X
=
�
G
~
U : (89)
17
Aus (73) und (89) folgen f�ur die materiellen Zeitableitungen
_
U =
�
G
~
U
�
�
= G
_
~
U (90)
_
U
;X
=
�
�
G
~
U
�
�
=
�
G
_
~
U : (91)
Werden die Zeitableitungen dur h Di�erenzenquotienten ersetzt, entstehen analoge Aus-
dr�u ke f�ur die Vers hiebungsinkremente.
�U = G �
~
U (92)
(�U )
; X
=
�
G �
~
U (93)
5.2 FEM-Diskretisierung { Verzerrungs-Vers hiebungs-
Beziehung
Die Koordinaten des Verzerrungstensors E seien in einem Vektor der Form
E = (E
11
; E
22
; E
33
; 2E
12
; 2E
23
; 2E
31
)
T
(94)
gegeben. Dabei ist zu bea hten, da� bei der Integration des Deformationsgesetzes die
S hubkoordinaten E
IJ
mit I 6= J ni ht mit dem Faktor 2 auftreten. Aus diesem Grund
m�ussen entspre hende Komponenten der konsistenten Materialmatrix mit dem Faktor
0; 5 multipliziert werden, um
�
Ubereinstimmung mit den hier abgeleiteten Beziehungen
herzustellen.
Werden in der Glei hung (52) die materiellen Zeitableitungen dur h Di�erenzenquotienten
ersetzt, erh�alt man die folgende Relation zwis hen den Inkrementen des Verzerrungstensors
und den Inkrementen der Vers hiebungsableitungen:
18
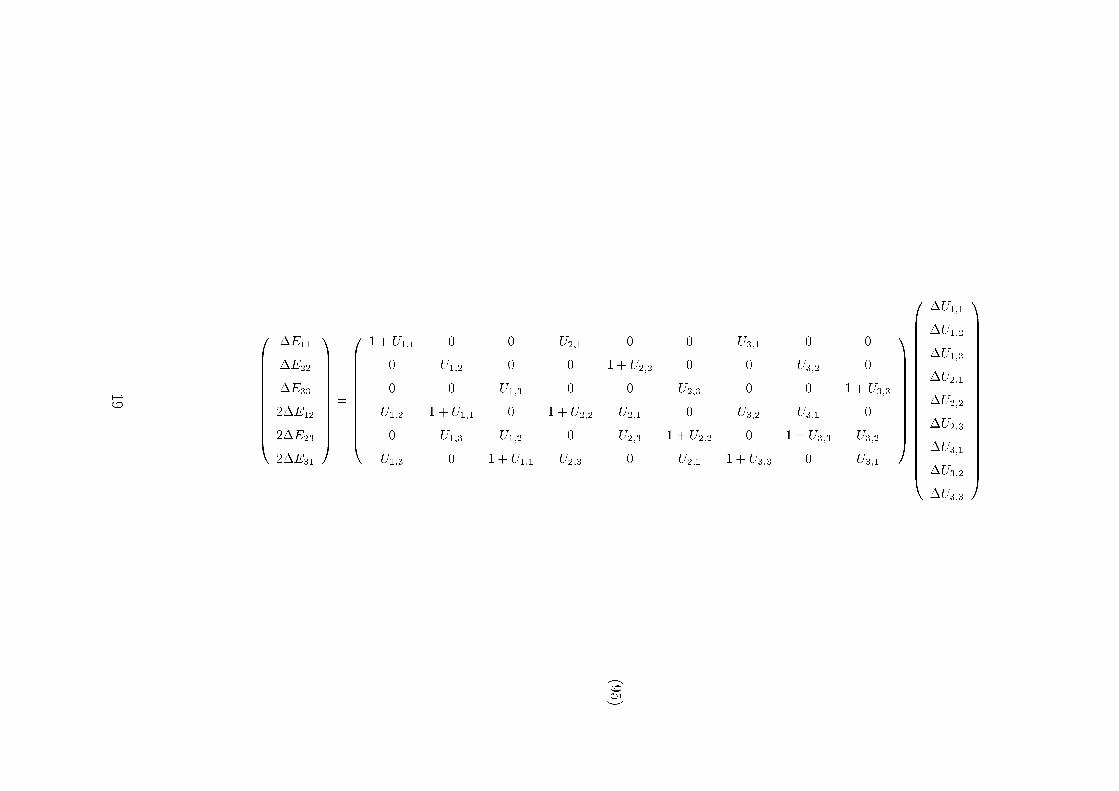
0BBBBBBBBBB�
�E
11
�E
22
�E
33
2�E
12
2�E
23
2�E
31
1CCCCCCCCCCA
=
0BBBBBBBBBB�
1 + U
1;1
0 0 U
2;1
0 0 U
3;1
0 0
0 U
1;2
0 0 1 + U
2;2
0 0 U
3;2
0
0 0 U
1;3
0 0 U
2;3
0 0 1 + U
3;3
U
1;2
1 + U
1;1
0 1 + U
2;2
U
2;1
0 U
3;2
U
3;1
0
0 U
1;3
U
1;2
0 U
2;3
1 + U
2;2
0 1 + U
3;3
U
3;2
U
1;3
0 1 + U
1;1
U
2;3
0 U
2;1
1 + U
3;3
0 U
3;1
1CCCCCCCCCCA
0BBBBBBBBBBBBBBBBBBB�
�U
1;1
�U
1;2
�U
1;3
�U
2;1
�U
2;2
�U
2;3
�U
3;1
�U
3;2
�U
3;3
1CCCCCCCCCCCCCCCCCCCA
(95)
19
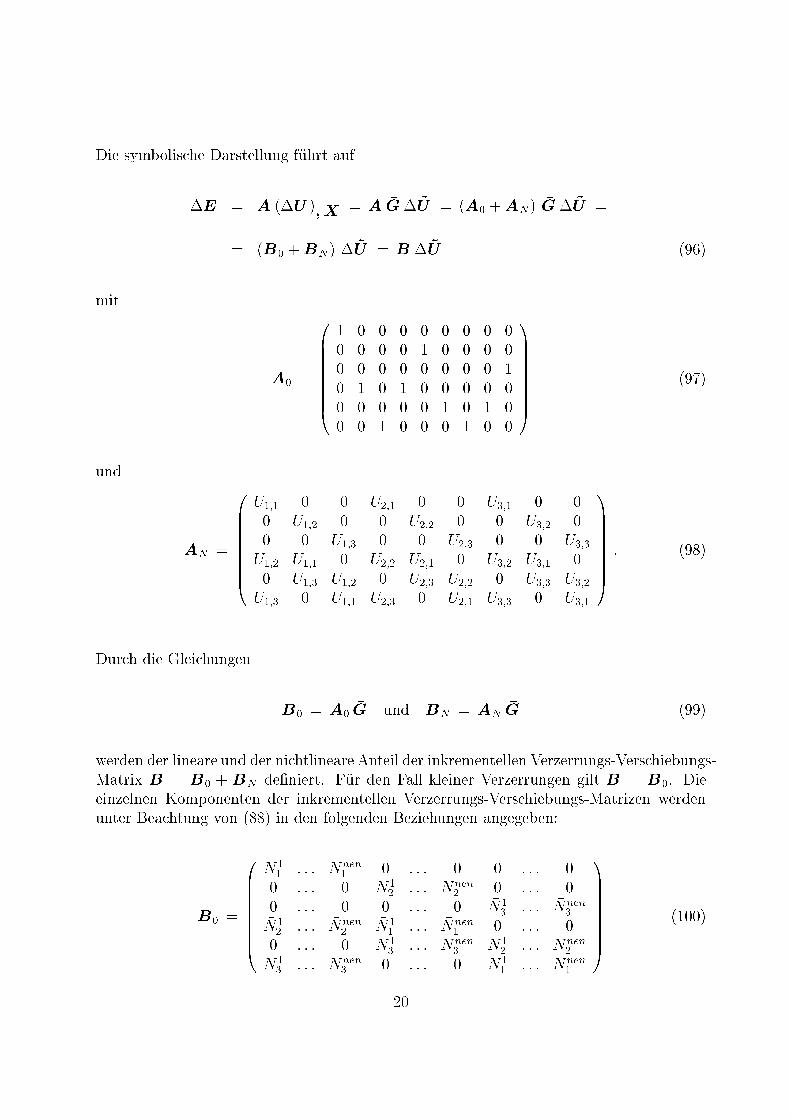
Die symbolis he Darstellung f�uhrt auf
�E = A (�U )
; X
= A
�
G �
~
U = (A
0
+A
N
)
�
G �
~
U =
= (B
0
+B
N
) �
~
U = B �
~
U (96)
mit
A
0
=
0
B
B
B
B
B
B
B
B
�
1 0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 1
0 1 0 1 0 0 0 0 0
0 0 0 0 0 1 0 1 0
0 0 1 0 0 0 1 0 0
1
C
C
C
C
C
C
C
C
A
(97)
und
A
N
=
0
B
B
B
B
B
B
B
B
�
U
1;1
0 0 U
2;1
0 0 U
3;1
0 0
0 U
1;2
0 0 U
2;2
0 0 U
3;2
0
0 0 U
1;3
0 0 U
2;3
0 0 U
3;3
U
1;2
U
1;1
0 U
2;2
U
2;1
0 U
3;2
U
3;1
0
0 U
1;3
U
1;2
0 U
2;3
U
2;2
0 U
3;3
U
3;2
U
1;3
0 U
1;1
U
2;3
0 U
2;1
U
3;3
0 U
3;1
1
C
C
C
C
C
C
C
C
A
: (98)
Dur h die Glei hungen
B
0
= A
0
�
G und B
N
= A
N
�
G (99)
werden der lineare und der ni htlineare Anteil der inkrementellen Verzerrungs-Vers hiebungs-
Matrix B = B
0
+ B
N
de�niert. F�ur den Fall kleiner Verzerrungen gilt B = B
0
. Die
einzelnen Komponenten der inkrementellen Verzerrungs-Vers hiebungs-Matrizen werden
unter Bea htung von (88) in den folgenden Beziehungen angegeben:
B
0
=
0
B
B
B
B
B
B
B
B
�
�
N
1
1
: : :
�
N
nen
1
0 : : : 0 0 : : : 0
0 : : : 0
�
N
1
2
: : :
�
N
nen
2
0 : : : 0
0 : : : 0 0 : : : 0
�
N
1
3
: : :
�
N
nen
3
�
N
1
2
: : :
�
N
nen
2
�
N
1
1
: : :
�
N
nen
1
0 : : : 0
0 : : : 0
�
N
1
3
: : :
�
N
nen
3
�
N
1
2
: : :
�
N
nen
2
�
N
1
3
: : :
�
N
nen
3
0 : : : 0
�
N
1
1
: : :
�
N
nen
1
1
C
C
C
C
C
C
C
C
A
(100)
20

B
N
=
0BBBBBBBBBB�
�
N
1
1
U
1;1
: : :
�
N
nen
1
U
1;1
�
N
1
1
U
2;1
: : :
�
N
nen
1
U
2;1
�
N
1
1
U
3;1
: : :
�
N
nen
1
U
3;1
�
N
1
2
U
1;2
: : :
�
N
nen
2
U
1;2
�
N
1
2
U
2;2
: : :
�
N
nen
2
U
2;2
�
N
1
2
U
3;2
: : :
�
N
nen
2
U
3;2
�
N
1
3
U
1;3
: : :
�
N
nen
3
U
1;3
�
N
1
3
U
2;3
: : :
�
N
nen
3
U
2;3
�
N
1
3
U
3;3
: : :
�
N
nen
3
U
3;3
�
N
1
1
U
1;2
+
�
N
1
2
U
1;1
: : :
�
N
nen
1
U
1;2
+
�
N
nen
2
U
1;1
�
N
1
1
U
2;2
+
�
N
1
2
U
2;1
: : :
�
N
nen
1
U
2;2
+
�
N
nen
2
U
2;1
�
N
1
1
U
3;2
+
�
N
1
2
U
3;1
: : :
�
N
nen
1
U
3;2
+
�
N
nen
2
U
3;1
�
N
1
2
U
1;3
+
�
N
1
3
U
1;2
: : :
�
N
nen
2
U
1;3
+
�
N
nen
3
U
1;2
�
N
1
2
U
2;3
+
�
N
1
3
U
2;2
: : :
�
N
nen
2
U
2;3
+
�
N
nen
3
U
2;2
�
N
1
2
U
3;3
+
�
N
1
3
U
3;2
: : :
�
N
nen
2
U
3;3
+
�
N
nen
3
U
3;2
�
N
1
1
U
1;3
+
�
N
1
3
U
1;1
: : :
�
N
nen
1
U
1;3
+
�
N
nen
3
U
1;1
�
N
1
1
U
2;3
+
�
N
1
3
U
2;1
: : :
�
N
nen
1
U
2;3
+
�
N
nen
3
U
2;1
�
N
1
1
U
3;3
+
�
N
1
3
U
3;1
: : :
�
N
nen
1
U
3;3
+
�
N
nen
3
U
3;1
1CCCCCCCCCCA
(101)
21

Die Komponenten
�
N
J
I
und U
I;J
sind dabei mit den Glei hungen (83)-(85) bzw. (86) zu
bere hnen.
5.3 FEM-Diskretisierung { lokale und globale Stei�gkeitsbeziehun-
gen
Aus den Beziehungen (92), (93) und (96) folgen f�ur die Variation des Vektors der Ver-
s hiebungsinkremente und dessen Ortsableitung bzw. die Variation des Tensors der
Verzerrungsinkremente
Æ(�U ) = G Æ(�
~
U ) (102)
Æ
�
(�U )
;X
�
=
�
G Æ(�
~
U ) (103)
Æ(�E ) = B Æ(�
~
U ) : (104)
Materielle Zeitableitungen in der Ges hwindigkeitsformulierung des Prinzips der virtuellen
Arbeit (65) werden zun�a hst dur h Di�erenzenquotienten ersetzt. Eine genauere Zeit-
diskretisierung mit Mehrs hrittverfahren ist ohne prinzipielle
�
Anderungen m�ogli h. Dur h
Verwendung einer f�ur die numeris he Behandlung des FEM-Problems g�unstigen Darstel-
lung der Koordinaten von zweistu�gen Tensoren als Vektoren und von vierstu�gen Tensoren
als Matrizen kann (72) in folgender Form modi�ziert werden:
Z
V
e
o
"
(Æ(�E ))
T
dT
dE
!
�E +
�
Æ(�U )
; X
�
T
T
�
(�U )
; X
#
dV
e
o
�
�
Z
ÆV
e
o
(Æ(�U ))
T
(�R) d (ÆV
e
o
) �
Z
V
e
o
%
o
(Æ(�U ))
T
(�K ) dV
e
o
= 0 (105)
mit
(Æ(�E ))
T
= (Æ(�E
11
); Æ(�E
22
); Æ(�E
33
); Æ(2�E
12
); Æ(2�E
23
); Æ(2�E
31
)) (106)
�E =
0
B
B
B
B
B
B
B
B
�
�E
11
�E
22
�E
33
2�E
12
2�E
23
2�E
31
1
C
C
C
C
C
C
C
C
A
(107)
22
dT
dE
!
=
0BBBBBBBBBBBBBBB�
dT
11
dE
11
dT
11
dE
22
dT
11
dE
33
dT
11
dE
12
dT
11
dE
23
dT
11
dE
31
dT
22
dE
11
dT
22
dE
22
dT
22
dE
33
dT
22
dE
12
dT
22
dE
23
dT
22
dE
31
dT
33
dE
11
dT
33
dE
22
dT
33
dE
33
dT
33
dE
12
dT
33
dE
23
dT
33
dE
31
dT
12
dE
11
dT
12
dE
22
dT
12
dE
33
12
�
dT
12
dE
12
+
dT
12
dE
21
�
12
�
dT
12
dE
23
+
dT
12
dE
32
�
12
�
dT
12
dE
31
+
dT
12
dE
13
�
dT
23
dE
11
dT
23
dE
22
dT
23
dE
33
12
�
dT
23
dE
12
+
dT
23
dE
21
�
12
�
dT
23
dE
23
+
dT
23
dE
32
�
12
�
dT
23
dE
31
+
dT
23
dE
13
�
dT
31
dE
11
dT
31
dE
22
dT
31
dE
33
12
�
dT
31
dE
12
+
dT
31
dE
21
�
12
�
dT
31
dE
23
+
dT
31
dE
32
�
12
�
dT
31
dE
31
+
dT
31
dE
13
�
1CCCCCCCCCCCCCCCA
(108)
23
�
Æ(�U )
; X
�
T
=
�
Æ
�
� (�U
1
)
� X
1
�
; Æ
�
� (�U
1
)
� X
2
�
; Æ
�
� (�U
1
)
� X
3
�
; Æ
�
� (�U
2
)
� X
1
�
; Æ
�
� (�U
2
)
� X
2
�
; Æ
�
� (�U
2
)
� X
3
�
; Æ
�
� (�U
3
)
� X
1
�
; Æ
�
� (�U
3
)
� X
2
�
; Æ
�
� (�U
3
)
� X
3
��
(109)
24
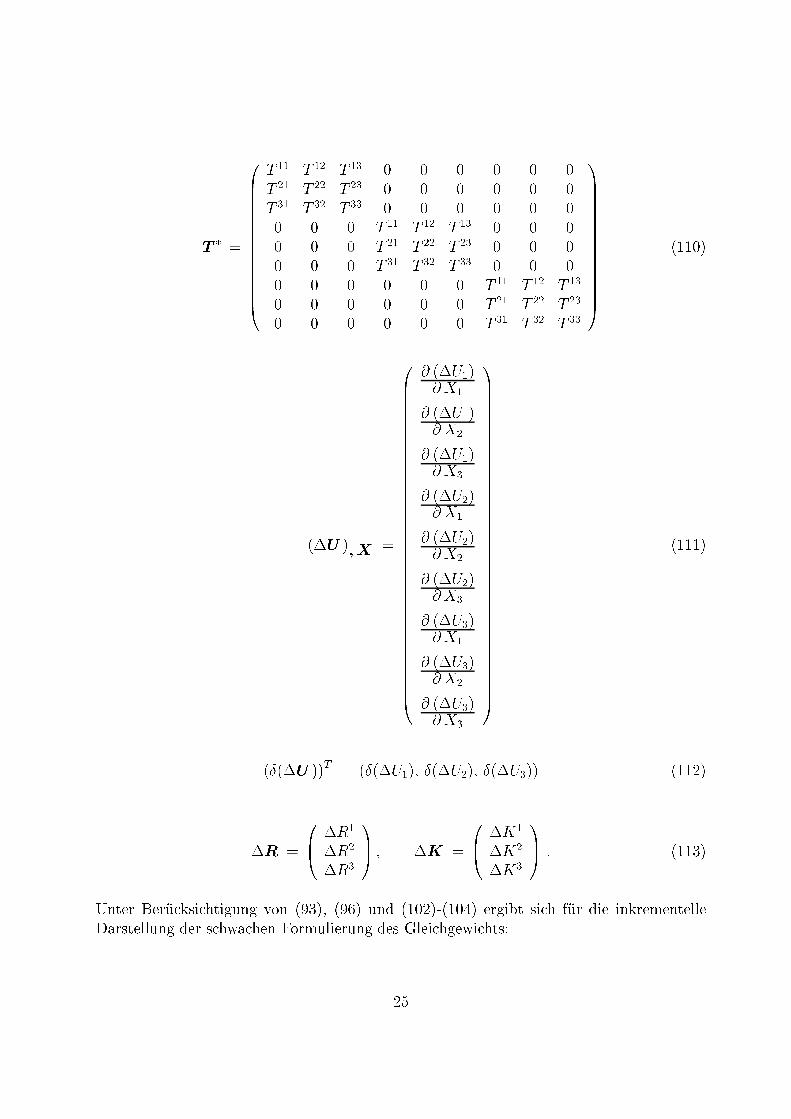
T
�
=
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
T
11
T
12
T
13
0 0 0 0 0 0
T
21
T
22
T
23
0 0 0 0 0 0
T
31
T
32
T
33
0 0 0 0 0 0
0 0 0 T
11
T
12
T
13
0 0 0
0 0 0 T
21
T
22
T
23
0 0 0
0 0 0 T
31
T
32
T
33
0 0 0
0 0 0 0 0 0 T
11
T
12
T
13
0 0 0 0 0 0 T
21
T
22
T
23
0 0 0 0 0 0 T
31
T
32
T
33
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(110)
(�U )
;X
=
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
� (�U
1
)
� X
1
� (�U
1
)
� X
2
� (�U
1
)
� X
3
� (�U
2
)
� X
1
� (�U
2
)
� X
2
� (�U
2
)
� X
3
� (�U
3
)
� X
1
� (�U
3
)
� X
2
� (�U
3
)
� X
3
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(111)
(Æ(�U ))
T
= (Æ(�U
1
); Æ(�U
2
); Æ(�U
3
)) (112)
�R =
0
B
�
�R
1
�R
2
�R
3
1
C
A
; �K =
0
B
�
�K
1
�K
2
�K
3
1
C
A
: (113)
Unter Ber�u ksi htigung von (93), (96) und (102)-(104) ergibt si h f�ur die inkrementelle
Darstellung der s hwa hen Formulierung des Glei hgewi hts:
25

Z
V
e
o
"
�
Æ(�
~
U )
�
T
B
T
dT
dE
!
B �
~
U +
�
Æ(�
~
U )
�
T
�
G
T
T
�
�
G �
~
U
#
dV
e
o
�
�
Z
ÆV
e
o
�
Æ(�
~
U )
�
T
G
T
(�R) d (ÆV
e
o
) �
Z
V
e
o
%
o
�
Æ(�
~
U )
�
T
G
T
(�K ) dV
e
o
=
=
�
Æ(�
~
U )
�
T
8
>
<
>
:
Z
V
e
o
"
B
T
dT
dE
!
B +
�
G
T
T
�
�
G
#
�
~
U dV
e
o
�
�
Z
ÆV
e
o
G
T
(�R) d (ÆV
e
o
) �
Z
V
e
o
%
o
G
T
(�K ) dV
e
o
9
>
=
>
;
= 0 : (114)
Die Beziehung (114) gilt f�ur beliebigeWerte der virtuellen Vers hiebungsinkremente Æ(�
~
U ).
Damit folgt aus (114) das inkrementelle FE-Stei�gkeitssystem als System ni htlinearer al-
gebrais her Glei hungen, die z. B. mit Hilfe des Newton-Verfahrens linearisiert werden.
8
>
<
>
:
Z
V
e
o
"
B
T
dT
dE
!
B +
�
G
T
T
�
�
G
#
dV
e
o
9
>
=
>
;
�
~
U �
�
Z
ÆV
e
o
G
T
(�R) d (ÆV
e
o
) �
Z
V
e
o
%
o
G
T
(�K ) dV
e
o
= 0 (115)
) K
e
�
~
U = �
~
P
e
: (116)
Hierbei stellt �
~
P
e
= (�P
1
1
: : :�P
nen
1
�P
1
2
: : :�P
nen
2
�P
1
3
: : :�P
nen
3
)
T
den Vektor der
Knotenkraftinkremente eines Elementes dar, der sowohl Anteile aus Ober �a henkraft-
inkrementen
�
~
P
A
=
Z
ÆV
e
o
G
T
(�R) d (ÆV
e
o
) (117)
als au h aus Volumenkraftinkrementen
�
~
P
V
=
Z
V
e
o
%
o
G
T
(�K ) dV
e
o
(118)
enth�alt.
26

Die Gesamtstei�gkeitsmatrix K und der Belastungsvektor �
~
P ergeben si h als FEM-
Akkumulation (
U
) aller Elementstei�gkeitsmatrizen und Elementbelastungsvektoren
K =
numel
℄
e=1
K
e
; �
~
P =
numel
℄
e=1
�
~
P
e
: (119)
Mit dem Vektor aller Knotenvers hiebungsinkremente
�U = (�U
1
1
: : :�U
nk
1
�U
1
2
: : :�U
nk
2
�U
1
3
: : :�U
nk
3
)
T
(120)
lautet das ni htlineare FEM-Glei hungssystem f�ur die Gesamtstruktur
K (U )�U = �
~
P : (121)
In
K
e
=
Z
V
e
o
"
B
T
dT
dE
!
B +
�
G
T
T
�
�
G
#
dV
e
o
= K
e
M0
+ K
e
MN
+ K
e
T
(122)
verk�orpern K
e
M0
und K
e
MN
den linearen und den ni htlinearen Anteil der materiellen
Elementstei�gkeitsmatrix sowie K
e
T
die geometris he Elementstei�gkeitsmatrix mit den
folgenden Bildungsvors hriften (unter Ber�u ksi htigung von (93)-(96) ):
K
e
M0
=
Z
V
e
o
B
T
0
dT
dE
!
B
0
dV
e
o
(123)
K
e
MN
=
Z
V
e
o
"
B
0
T
dT
dE
!
B
N
+B
T
N
dT
dE
!
B
0
+ B
T
N
dT
dE
!
B
N
#
dV
e
o
(124)
K
e
T
=
Z
V
e
o
�
G
T
T
�
�
G dV
e
o
: (125)
F�ur kleine Deformationen sind K
e
MN
und K
e
T
glei h Null.
Bei der numeris hen Bere hnung der Elementstei�gkeitsmatrix wird das Integral (122)
�uber das Elementvolumen n�aherungsweise dur h eine Gau�s he Quadraturformel ersetzt:
K
e
�
ngp
X
j=1
!
j
2
4
B
T
(�
j
)
dT
dE
!
�
j
B (�
j
) +
�
G
T
(�
j
)T
�
�
G(�
j
)
3
5
det
�
J
�
�
: (126)
Darin bedeuten �
j
die lokalen Koordinaten und !
j
die Wi htungsfaktoren der einzelnen In-
tegrationsst�utzstellen. Au�erdem ist die Transformation von Volumenintegralen zwis hen
dem realen Element und dem mittels lokaler Koordinaten dargestellten Referenzelement
zu ber�u ksi htigen.
dV (X ) = dX
1
dX
2
dX
3
= det
�
J
�
�
d�
1
d�
2
d�
3
= det
�
J
�
�
dV (�) : (127)
Analoge Beziehungen k�onnen au h f�ur die Integrale der Ober �a hen- und Volumenkr�afte
abgeleitet werden.
27

6 Kinematik �niter elastis h-plastis her Verzerrungen
Den Ausgangspunkt der kinematis hen Betra htungen zur Herleitung eines allgemeinen
Sto�gesetzes f�ur gro�e elastis h-plastis he Verformungen stellt der Deformationsgradient
F mit
F = F
i
I
g
i
G
i
=
�x
i
�X
I
g
i
G
i
(128)
dar [11℄. Er bildet ein materielles, in�nitesimales Linienelement dX von der Ausgangskon-
�guration in die Momentankon�guration ab und bes hreibt damit die Stre kungen und
Drehungen, die dieses Linienelement w�ahrend der Bewegung erf�ahrt.
Bei elastis h-plastis her Deformation kann eine sogenannte Zwis henkon�guration de�niert
werden, indem lokal eine �ktive elastis he Entlastung der materiellen Teil hen vorgenom-
men wird [6℄. Mit Hilfe dieser Kon�guration ist es m�ogli h, eine konsequente Trennung
von elastis hen und plastis hen Gr�o�en im Deformationsgesetz zu errei hen.
Zwis henkon�guration
~
B
~g
1
~x
1
~g
2
~x
2
~g
3
~x
3
�
�Æ
�
�1
X
XXy
-
6
�
�
�
~e
1
Z
1
~e
2
Z
2
~e
3
Z
3
-
6
�
�
A
A
A
A
A
A
A
A
A
AK
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�*
�
R
r
Ausgangskon�guration
t = t
o
B
o
G
1
X
1
G
2
X
2
G
3
X
3
�
��
�
�:
�
��
Momentankon�guration
t
B
g
1
x
1
g
2
x
2
g
3
x
3
C
CO
X
Xz
H
HY
-
F
p
6
F
e
�
�
�
�
�
�
�
�
�
�
�
��
'
t
: X 7! x = '
t
(X )
F
t
= r'
t
Figure 1: Ausgangs-, Zwis hen- und Momentankon�guration
28

Dazu wird die multiplikative Zerlegung des Deformationsgradienten in einen elastis hen
Anteil F
e
und in einen plastis hen Anteil F
p
genutzt. Aus der angegebenen De�nition der
Zwis henkon�guration wird deutli h, da� sie in der Regel ni ht kompatibel ist.
Mit Hilfe des Deformationsgradienten bzw. seiner einzelnen Anteile ist es m�ogli h, Ten-
soren zwis hen den Kon�gurationen abzubilden. Die folgenden Beziehungen zeigen dieses
anhand des Greens hen Verzerrungstensors E
[
. Auf die Ausgangskon�guration bezogene
Gr�o�en werden jeweils mit Gro�bu hstaben gekennzei hnet, Tensoren der Zwis henkon�gu-
ration sind mit einer Tilde versehen, w�ahrend die zur Momentankon�guration geh�orenden
Variablen dur h Kleinbu hstaben harakterisiert sind. Gemis htvariante Tensoren wer-
den ledigli h dur h ihr Symbol dargestellt, ko- und kontravariante Tensoren dagegen no h
zus�atzli h mit der ho hgestellten Markierung ()
[
bzw. ()
℄
.
E
[
=
1
2
�
C
[
�G
[
�
= E
e[
+E
p[
=
1
2
�
C
[
�C
p[
�
+
1
2
�
C
p[
�G
[
�
~
E
[
= F
p�T
E
[
F
p�1
=
1
2
�
~
C
e[
�
~
G
[
�
=
~
E
e[
+
~
E
p[
=
1
2
�
~
C
e[
�
~
G
[
�
+
1
2
�
~
G
[
� ~
p[
�
e
[
= F
�T
E
[
F
�1
=
1
2
�
g
[
�
[
�
= e
e[
+ e
p[
=
1
2
�
g
[
�
e[
�
+
1
2
�
e[
�
[
�
G
[
,
~
G
[
und g
[
stellen die Metriktensoren in der Ausgangs-, Zwis hen bzw. der Momen-
tankon�guration, C
[
, C
p[
,
~
C
e[
, ~
p[
,
e[
und
[
deren unters hiedli he Abbildungen in die
vers hiedenen Kon�gurationen und e
[
den Almansis hen Verzerrungstensor dar.
7 Haupts�atze der Thermodynamik
Der Energieerhaltungssatz
% _� = �
℄
�� d
[
� div q + % h (129)
und die Entropieunglei hung
% _� + div
�
q
�
�
� %
h
�
� 0 (130)
bilden die Grundlage einer physikalis h konsistenten Formulierung des Sto�gesetzes
[4, 9℄. Hierbei verk�orpern % die Di hte, �
℄
den Cau hys hen Spannungstensor und d
[
die Deformationsges hwindigkeit in der Momentankon�guration. Weiterhin bes hreiben
die spezi�s hen Gr�o�en � die innere Energie, � die Entropie, q den W�arme u� und h die
W�armequellendi hte. Die Variable � steht f�ur die absolute Temperatur.
29

Die Kombination der beiden oben genannten Beziehungen, verbunden mit der De�nition
der freien Helmholtz-Energie
= � � �� (131)
f�uhrt auf die Clausius-Duhem-Unglei hung
�%
�
_
+
_
��
�
+ �
℄
�� d
[
�
1
�
q � grad � � 0 : (132)
Im isothermen Fall vereinfa ht si h diese in der folgenden Art und Weise:
�%
_
+ �
℄
�� d
[
� 0 : (133)
8 Annahmen zur Herleitung des Deformationsgeset-
zes
F�ur die Formulierung des Deformationsgesetzes ist es notwendig, bestimmte Annahmen zu
tre�en, die sowohl physikalis h sinnvoller, als au h mathematis h praktis her Natur sein
k�onnen.
8.1 Additive Zerlegung der Energiefunktion
Es wird festgelegt, da� die freie Helmholtz-Energie additiv in einen elastis hen und einen
plastis hen Anteil aufgespalten werden kann. Bei der Formulierung der Energie in der
Zwis henkon�guration enthalten die beiden Anteile jeweils nur rein elastis he bzw. rein
plastis he Gr�o�en. In der folgenden Darstellung steht ~a
[
f�ur eine beliebige, in der Zwi-
s henkon�guration de�nierte innere Variable.
=
e
�
~
C
e[
; ~g
[
�
+
p
�
~a
[
�
(134)
8.2 Wahl der Kon�guration
Wi htig ist im weiteren die Auswahl der Kon�guration, in der das komplette Deforma-
tionsgesetz letztendli h verwendet werden soll. Im vorliegenden Fall wird es f�ur ein FEM-
Programm entwi kelt, wel hes auf einer Total-Lagranges hen Bes hreibungsweise basiert.
Damit steht fest, da� die endg�ultige Formulierung des Deformationsgesetzes ebenfalls in
materieller Bes hreibungsweise erfolgt.
30

8.3 Bildung von Tensorinvarianten
F�ur die Herleitung des Deformationsgesetzes ist es notwendig, Ans�atze f�ur bestimmte Funk-
tionen (�! Flie�funktion, freie Helmholtz-Energie) aufzustellen. Diese Ans�atze sollen dem
Objektivit�atsprinzip gen�ugen. Daher bieten si h isotrope Tensorfunktionen an, die aus den
Invarianten der Tensoren gebildet werden [2℄. Hierbei ist allerdings folgende Eigens haft
von Tensorinvarianten bei der Abbildung in andere Kon�gurationen zu bea hten:
J
1
�
A
[
�
= A
[
�� G
℄
= F
T
a
[
F �� F
�1
b
℄
F
�T
= a
[
�� b
℄
6= a
[
�� g
℄
: (135)
Die dargestellte Abbildung der ersten Invariante des Tensors A
[
von der Ausgangs- in die
Momentankon�guration erh�alt zwar deren invarianten Charakter, f�uhrt jedo h zu einer
Bildungsvors hrift, die von der Verwendung der jeweiligen Kon�gurationsmetrik abwei ht.
Deshalb sollte gr�undli h �uberlegt werden, wel he Kon�guration f�ur die Formulierung der
Invarianten zu bevorzugen ist. Im vorliegenden Fall werden die Invarianten f�ur die in
der Flie�bedingung auftretenden unabh�angigen Variablen in der Momentankon�guration
gebildet. Der Grund f�ur diese Vorgehensweise liegt in der physikalis h sinnvollen De�nition
des hydrostatis hen Spannungszustandes, der das plastis he Flie�en ni ht beein u�t. Das
bedeutet, da� die Flie�bedingung nur mit Spannungsgr�o�en gebildet wird, von denen der
hydrostatis he Spannungsanteil abgespalten wurde (�! Deviatoren). Genau dieser hydro-
statis he Anteil wird dur h die erste Spannungsinvariante in der Momentankon�guration
dargestellt. Das hei�t, da� bei Verwendung von anderen Invarianten als denen der Momen-
tankon�guration der hydrostatis he Spannungszustand ni ht korrekt widergespiegelt wird.
Beim Formulieren der freien Energiedi hte wird im Gegensatz dazu die Ausgangskon-
�guration f�ur die Bildung der Invarianten f�ur die zum Spannungstensor arbeitskonjugierten
Verzerrungen herangezogen. Diese Vorgehensweise liegt darin begr�undet, da� Invarianten
f�ur den zum 2. Piola-Kir hho�s hen Spannungstensor arbeitskonjugierten re hten Cau hy-
Green-Tensor nur in der Ausgangskon�guration gebildet werden k�onnen und alle kinema-
tis hen Variablen glei h behandelt werden.
8.4 Kovarianzprinzip
Weiterhin wird verlangt, da� si h die Struktur des Deformationsgesetzes gegen�uber Abbil-
dungen in beliebige andere Kon�gurationen ni ht �andern soll [10℄. Diese Forderung f�uhrt
in ihrer Konsequenz auf die Verwendung von Lie-Ableitungen, die das push-forward der
materiellen Zeitableitung eines Tensors von der Ausgangs- in eine andere Kon�guration
realisieren.
F�ur die De�nition der zeitli hen
�
Anderung der freien Helmholtz-Energie soll das im folgen-
den verdeutli ht werden. Die Variable A
[
stellt wiederum eine beliebige innere Variable
31

dar, �
p
?
bzw. �
?
harakterisieren die push-forward-Operation, d.h. die Abbildung von
Tensoren der Ausgangskon�guration in die Zwis hen- bzw. Momentankon�guration.
Ausgangskon�guration: =
�
C
[
;C
p[
;A
[
�
Zwis henkon�guration: =
�
�
p
?
�
C
[
�
;�
p
?
�
C
p[
�
;�
p
?
�
A
[
��
=
�
~
C
e[
; ~g
[
; ~a
[
�
Momentankon�guration: =
�
�
?
�
C
[
�
;�
?
�
C
p[
�
;�
?
�
A
[
��
=
�
g
[
;
e[
;a
[
�
)
_
=
�
e
�C
[
�� C
[
+
�
e
�C
p[
�� C
p[
+
�
p
�A
[
�� A
[
=
=
�
e
�
~
C
e[
�� L
p
�
~
C
e[
�
+
�
e
�~g
[
�� L
p
�
~g
[
�
+
�
p
�~a
[
�� L
p
�
~a
[
�
8.5 Konzept der dualen Variablen
Eine weitere Annahme betri�t das Konzept der dualen Variablen [5℄, wel hes bei der Her-
leitung des Deformationsgesetzes angewendet werden soll.
Verzerrungen und deren zeitli he Ableitungen werden mit Hilfe der jeweils glei hen Ab-
bildungstensoren H von der Ausgangskon�guration in beliebige andere Kon�gurationen
abgebildet.
^
E
[
= H
�T
E
[
H
�1
und
4
^
E
[
= H
�T
_
E
[
H
�1
(136)
Mit der Invarianzeigens haft der spezi�s hen Gr�o�en Form�anderungsleistung, Erg�anzungs-
leistung und inkrementelle Leistung k�onnen zugeordnete Spannungen und Spannungs-
ges hwindigkeiten de�niert werden, was am Beispiel des zweiten Piola-Kir hho�s hen
Spannungstensors verdeutli ht werden soll.
T
℄
��
_
E
[
=
^
T
℄
��
4
^
E
[
_
T
℄
�� E
[
=
5
^
T
℄
��
^
E
[
_
T
℄
��
_
E
[
=
5
^
T
℄
��
4
^
E
[
(137)
Es gilt damit
^
T
℄
= H T
℄
H
T
und
5
^
T
℄
= H
_
T
℄
H
T
: (138)
Die Befolgung dieses Prinzips s hlie�t so z.B. die Anwendung der Jaumanns hen Zeitableitung
auf den Cau hys hen Spannungstensor aus.
32

9 Ein thermodynamis h konsistentes Deformations-
gesetz
Na h diesen vorbereitenden
�
Uberlegungen kann die Herleitung des Deformationsgesetzes
beginnen. Den Ausgangspunkt bildet die Clausius-Duhem-Unglei hung f�ur den isothermen
Fall in der Ausgangskon�guration.
�%
0
_
+
1
2
T
℄
��
_
C
[
� 0 (139)
F�ur die freie Energiedi hte soll gelten
=
e
�
C
[
� C
p[
�
+
p
�
A
[
1
�
=
e
�
E
e[
�
+
p
�
A
[
1
�
: (140)
Beim Einsetzen der Zeitableitung von (140) in (139) wird folgender Ausdru k erhalten:
�%
0
(
�
e
�E
e[
��
_
E
e[
+
�
p
�A
[
1
��
_
A
[
1
)
+ T
℄
��
�
_
E
e[
+
1
2
_
C
p[
�
� 0 : (141)
Es ist m�ogli h, ein hyperelastis hes Deformationsgesetz aus der Unglei hung (141)
abzuspalten.
T
℄
= %
0
�
e
�E
e[
(142)
Die verbleibenden Terme bilden die Dissipationsunglei hung:
D
p
= � %
0
(
�
p
�A
[
1
��
_
A
[
1
)
+
1
2
T
℄
��
_
C
p[
� 0 : (143)
Mit weiteren konstitutiven Annahmen
�
℄
= %
0
�
p
�A
[
1
=
�
�
J
2
�
A
[
1
��
�A
[
1
= G
℄
A
[
1
G
℄
(144)
kann die Dissipationsunglei hung au h ges hrieben werden als
D
p
= ��
℄
��
_
A
℄
1
+
1
2
T
℄
��
_
C
p[
! max : (145)
�
℄
sei die zu A
[
arbeitskonjugierte Variable in der Ausgangskon�guration und soll den
R�u kspannungstensor darstellen.
Entspre hend dem Prinzip vom Maximum der plastis hen Dissipation wird verlangt, da�
die unbekannten Tensorvariablen so bestimmt werden m�ussen, da� die Unglei hung (143)
einen maximalen Wert annimmt. Vorausgesetzt wird dabei die Erf�ullung der Flie�bedin-
gung.
33

Damit ergibt si h ein Extremwertproblem mit Nebenbedingung in der folgenden Art:
F = D
p
�
�
℄
; T
℄
�
� �F
�
�
℄
; T
℄
�
(146)
F ! max (147)
Als Flie�bedingung wird ein f�ur gro�e Deformationen modi�zierter Ansatz na h Baltov-
Saw zuk [1℄ verwendet, mit dem es m�ogli h ist, sowohl isotrope und kinematis he als au h
Distorsionsverfestigung zu ber�u ksi htigen. Die Flie�bedingung wird in der Momentankon-
�guration formuliert und ans hlie�end in die Ausgangskon�guration zur�u kgezogen. Der
vierstu�ge Tensor K
[
4
dient der Bes hreibung von Anfangsanisotropien bzw. einer Distor-
sionsverfestigung.
F =
�
�
T
℄
� ��
℄
�
�� K
[
4
��
�
�
T
℄
� ��
℄
�
�
2
3
T
2
F
= 0 (148)
mit
�
T
℄
= T
℄
�
1
3
�
T
℄
�� C
[
�
B
℄
und B
℄
=
�
C
[
�
�1
(149)
Das Extremwertproblem wird gel�ost, indem die Ableitungen von (146) na h den unbekan-
nten Tensorvariablen T
℄
, �
℄
und dem Lagranges hen Multiplikator � glei h Null gesetzt
werden. Diese Vorgehensweise in Verbindung mit der inkrementellen Formulierung des
hyperelastis hen Materialgesetzes liefert ein Algebro-Di�erentialglei hungssystem, dessen
L�osung u.a. die (146) maximierenden Spannungen und R�u kspannungen sind.
_
T
℄
=
�
2
�
�
e
�
�E
e[
�E
e[
��
1
2
_
C
[
�
�
2
�
�
e
�
�E
e[
E
e[
��
1
2
_
C
p[
(150)
_
C
p[
= 2�
�F
�T
℄
(151)
_
A
[
1
= ��
�F
��
℄
) _�
℄
= G
℄
��
�F
��
℄
!
G
℄
(152)
_
E
p
v
= �
s
2
3
B
℄
�F
�T
℄
�� B
℄
�F
�T
℄
(153)
F =
�
�
T
℄
� ��
℄
�
�� K
[
4
��
�
�
T
℄
� ��
℄
�
�
2
3
T
2
F
= 0 (154)
Die Glei hung (153)
2
f�ur die plastis he Bogenl�ange wird dem System hinzugef�ugt, da z.B.
die isotrope Verfestigung, harakterisiert dur h die Entwi klung der Flie�spannung, von
E
p
v
abh�angt. Deshalb ist eine Entwi klungsglei hung f�ur E
p
v
notwendig.
Na h dem
�
Ubergang von mathematis hen auf physikalis he Tensorkoordinaten kann im
2
(153) entsteht aus
_
E
p
v
=
q
2
3
B
℄
_
E
p[
� �B
℄
_
E
p[
unter Ber�u ksi htigung von (151).
34

weiteren f�ur beliebig orthogonale krummlinige Koordinatensysteme, wie sie in der FEM
Verwendung �nden, auf die Kennzei hnung ko- und kontravarianter Tensoren verzi htet
werden. Damit kann das Algebro-Di�erentialglei hungssystem (150-154) wie folgt
_
T + �
D
4
��
� F
� T
�
1
2
D
4
��
_
C = 0 (155)
_� � �
� F
� T
= 0 (156)
_
E
p
v
� �
s
2
3
B
� F
� T
��B
� F
� T
= 0 (157)
F =
�
�
T � ��
�
�� K
4
��
�
�
T � ��
�
�
2
3
T
2
F
(E
p
v
) = 0 (158)
bzw. in der verallgemeinerten Form
_
T + �
D
4
��
� F
� T
�
1
2
D
4
��
_
C = 0 (159)
_� + �Q
1
(T ;�) = 0 (160)
_
E
p
v
+ �Q
2
(T ;�) = 0 (161)
F (T ;�; E
p
v
) = 0 (162)
dargestellt werden.
10 Numeris he Simulation
Einleitend soll erw�ahnt werden, da� bei der numeris hen Umsetzung des Deformationsge-
setzes die Koordinaten zweistu�ger Tensoren als Vektoren und vierstu�ger Tensoren als
Matrizen verarbeitet werden.
Das Algebro-Di�erentialglei hungssystem (159)-(162) kann nur mit numeris hen Verfahren
gel�ost werden. Zuerst erfolgt die Diskretisierung der Glei hungen (159)-(162) na h der Zeit
unter Nutzung des folgenden numeris hen Integrationsalgorithmus f�ur eine gew�ohnli he
Di�erentialglei hung:
d y
d t
= _y = f(t; y) (163)
y
n+1
= y
n
+ (� f
n+1
+ (1� �) f
n
) � t (164)
mit
� t = t
n+1
� t
n
(165)
35

und
� 2 [0; 1℄; � =
8
>
<
>
:
0:0 : Euler vorw�arts
1:0 : Euler r�u kw�arts
0:5 : Crank-Ni olson (Trapezregel)
(166)
Mit (163)-(165) folgt aus dem System (159)-(162)
T
n+1
� T
n
�
�
�
1
2
D
4
n+1
��
_
C
n+1
+ (1� �)
1
2
D
4
n
��
_
C
n
�
�t+
+
"
��
n+1
D
4
n+1
��
� F
� T
�
�
�
�
�
n+1
+ (1� �)�
n
D
4
n
��
� F
� T
�
�
�
�
�
n
#
�t = 0 (167)
�
n+1
� �
n
+
h
��
n+1
Q
1
n+1
+ (1� �)�
n
Q
1
n
i
�t = 0 (168)
E
p
v
n+1
� E
p
v
n
+
h
��
n+1
Q
2
n+1
+ (1� �)�
n
Q
2
n
i
�t = 0 (169)
F (T
n+1
;�
n+1
; E
p
v
n+1
) = 0 : (170)
Im n�a hsten S hritt wird
_
C
n+1
na h Anwendung der Zeitdiskretisierung (164) dur h
_
C
n+1
=
1
��t
h
�C
n+1
� (1� �)
_
C
n
�t
i
(171)
ersetzt. W�ahrend � in den folgenden Iterationen beliebig ist, gilt f�ur den 1. S hritt stets
� = 1. Damit entsteht das folgende ni htlineare System algebrais her Glei hungen:
T
n+1
� T
n
+
"
��
n+1
D
4
n+1
��
� F
� T
�
�
�
�
�
n+1
+ (1� �)�
n
D
4
n
��
� F
� T
�
�
�
�
�
n
#
�t �
�
�
1
2
(1� �)
�
D
4
n
�D
4
n+1
�
��
_
C
n
�
�t �
1
2
D
4
n+1
���C
n+1
= 0 (172)
�
n+1
��
n
+
h
��
n+1
Q
1
n+1
+ (1� �)�
n
Q
1
n
i
�t = 0 (173)
E
p
v
n+1
� E
p
v
n
+
h
��
n+1
Q
2
n+1
+ (1� �)�
n
Q
2
n
i
�t = 0 (174)
F (T
n+1
;�
n+1
; E
p
v
n+1
) = 0 : (175)
F�ur die verk�urzte Darstellung der weiteren L�osungss hritte wird ein Variablen-Vektor z
eingef�uhrt.
z = (T ;�; E
p
v
; �)
T
(176)
Ebenso wird ein Operator G de�niert, der die linke Seite des Glei hungssystems (172)-
(175) repr�asentiert.
G
�
z
n
; z
n+1
;�C
n+1
;
_
C
n
�
(177)
36
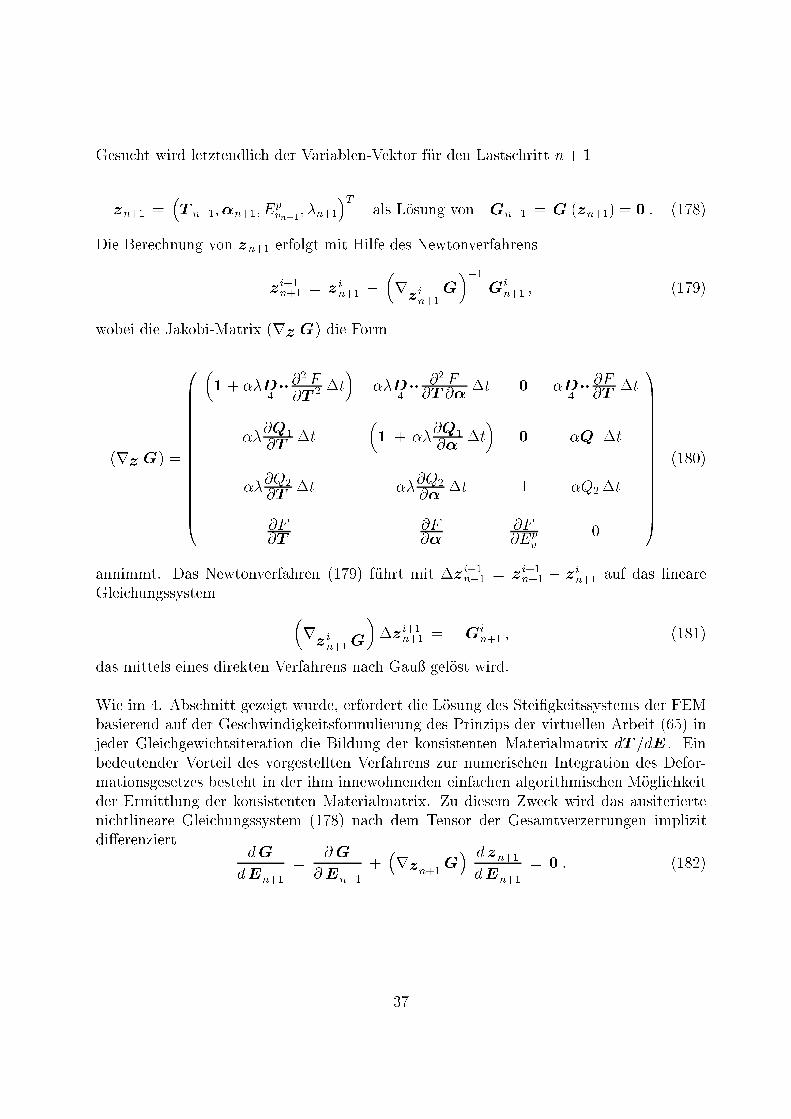
Gesu ht wird letztendli h der Variablen-Vektor f�ur den Lasts hritt n+ 1
z
n+1
=
�
T
n+1
;�
n+1
; E
p
v
n+1
; �
n+1
�
T
als L�osung von G
n+1
= G (z
n+1
) = 0 : (178)
Die Bere hnung von z
n+1
erfolgt mit Hilfe des Newtonverfahrens
z
i+1
n+1
= z
i
n+1
�
�
r
z
i
n+1
G
�
�1
G
i
n+1
; (179)
wobei die Jakobi-Matrix (r
z
G) die Form
(r
z
G) =
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
�
1 + ��D
4
��
�
2
F
�T
2
�t
�
��D
4
��
�
2
F
�T ��
�t 0 �D
4
��
�F
�T
�t
��
�Q
1
�T
�t
�
1 + ��
�Q
1
��
�t
�
0 �Q
1
�t
��
�Q
2
�T
�t ��
�Q
2
��
�t 1 �Q
2
�t
�F
�T
�F
��
�F
�E
p
v
0
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(180)
annimmt. Das Newtonverfahren (179) f�uhrt mit �z
i+1
n+1
= z
i+1
n+1
� z
i
n+1
auf das lineare
Glei hungssystem
�
r
z
i
n+1
G
�
�z
i+1
n+1
= �G
i
n+1
; (181)
das mittels eines direkten Verfahrens na h Gau� gel�ost wird.
Wie im 4. Abs hnitt gezeigt wurde, erfordert die L�osung des Stei�gkeitssystems der FEM
basierend auf der Ges hwindigkeitsformulierung des Prinzips der virtuellen Arbeit (65) in
jeder Glei hgewi htsiteration die Bildung der konsistenten Materialmatrix dT =dE . Ein
bedeutender Vorteil des vorgestellten Verfahrens zur numeris hen Integration des Defor-
mationsgesetzes besteht in der ihm innewohnenden einfa hen algorithmis hen M�ogli hkeit
der Ermittlung der konsistenten Materialmatrix. Zu diesem Zwe k wird das ausiterierte
ni htlineare Glei hungssystem (178) na h dem Tensor der Gesamtverzerrungen implizit
di�erenziert
dG
dE
n+1
=
�G
�E
n+1
+
�
r
z
n+1
G
�
d z
n+1
dE
n+1
= 0 : (182)
37

Na h Umstellung repr�asentiert (182) wiederum ein System linearer algebrais her
Glei hungen
�
r
z
n+1
G
�
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
dT
dE
�
�
�
�
n+1
d�
dE
�
�
�
�
n+1
dE
p
v
dE
�
�
�
�
n+1
d �
dE
�
�
�
�
n+1
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
=
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
�
D
4
n+1
0
0
0
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(183)
mit der bekannten Jakobi-Matrix (180) und einer re hten Seite, wel he neben Nullkompo-
nenten die ebenfalls bereits bekannte hyperelastis he MaterialmatrixD
4
j
n+1
enth�alt. Unter
Nutzung eines direkten L�osungsverfahrens kann die konsistente Materialmatrix dur h Mul-
tiplikation der re hten Seite des Glei hungssystems (182) mit der invertierten Jakobi-
Matrix eÆzient und mit der glei hen Genauigkeit wie die Integration des Deformation-
sgesetzes ermittelt werden.
11 Beispiele
Das bes hriebene Deformationsgesetz wurde in ein FEM-Programm f�ur Parallelre hner
eingebaut. Im folgenden sollen einige Ergebnisse f�ur zwei Beispiele vorgestellt werden.
Zu bemerken ist, da� f�ur kleine Deformationen die numeris hen Resultate mit einem am
Berei h vorhandenen FEM-Programm validiert wurden.
11.1 Gelo hte S heibe
Als erstes Beispiel wurde eine gelo hte S heibe f�ur eine glei hverteilte Normalvers hiebung
am oberen Rand unter Annahme eines ebenen Verzerrungszustandes (EVZ) betra htet.
Die unters hiedli h eingef�arbten Berei he im Bild 2 kennzei hnen die Aufteilung des
Gebietes auf die Prozessoren des Parallelre hners.
38
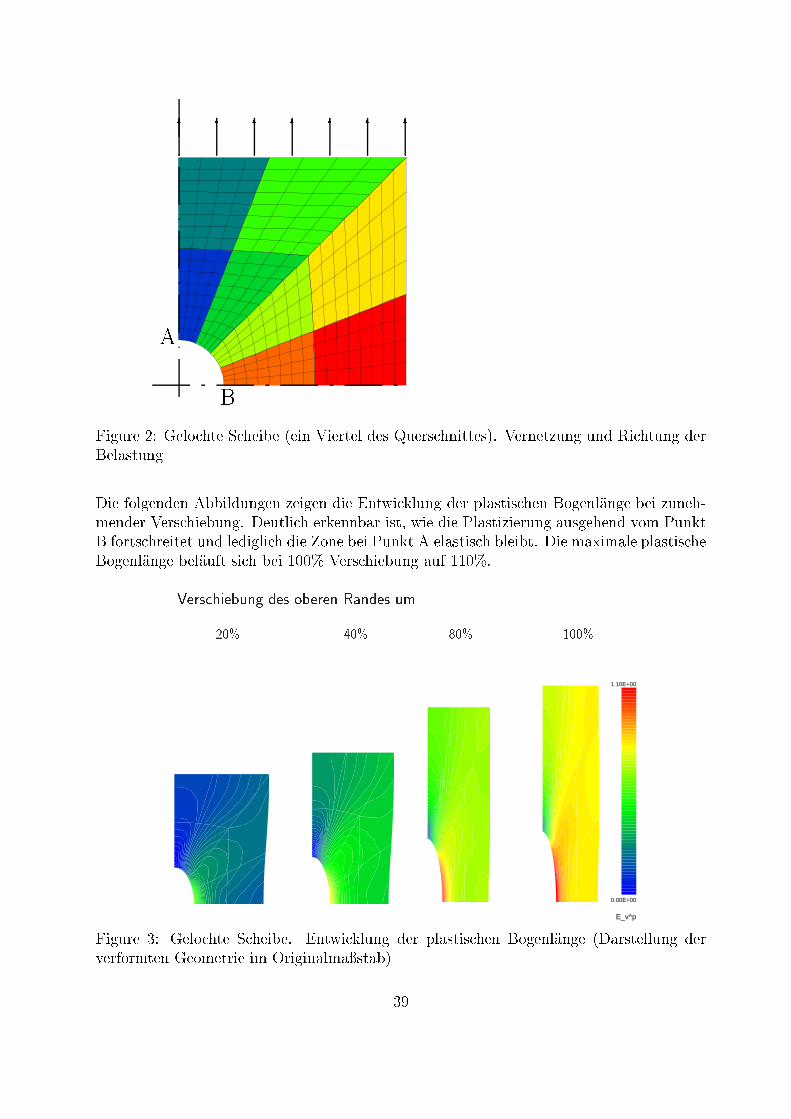
A
B
6 6 6 6 6 6 6
Figure 2: Gelo hte S heibe (ein Viertel des Quers hnittes). Vernetzung und Ri htung der
Belastung
Die folgenden Abbildungen zeigen die Entwi klung der plastis hen Bogenl�ange bei zuneh-
mender Vers hiebung. Deutli h erkennbar ist, wie die Plastizierung ausgehend vom Punkt
B forts hreitet und ledigli h die Zone bei Punkt A elastis h bleibt. Die maximale plastis he
Bogenl�ange bel�auft si h bei 100% Vers hiebung auf 110%.
0.00E+00
1.10E+00
E_v^p
Verschiebung des oberen Randes um
20% 40% 80% 100%
Figure 3: Gelo hte S heibe. Entwi klung der plastis hen Bogenl�ange (Darstellung der
verformten Geometrie im Originalma�stab)
39

11.2 Freies Stau hen
Das zweite Beispiel betri�t den Stau hversu h mit freien Seitenr�andern und vollst�andiger
Haftung an den belasteten R�andern im EVZ. Es wurde wiederum mit 8 Prozessoren gere h-
net.
stauch8g - Level 2 - 8 proc.
? ? ? ? ? ? ?
Figure 4: Freies Stau hen (ein Viertel des Quers hnitts). Vernetzung und Ri htung der
Belastung
Die folgenden Abbildungen zeigen die Entwi klung der plastis hen Bogenl�ange bei einer
Vers hiebung des oberen Randes bis maximal 19% der Ausgangsh�ohe. Au h hier kann die
Ausbildung der plastis hen Zonen gut verfolgt werden. Sie entwi keln si h ausgehend von
den E kpunkten hin zur Mitte des Bauteils. Die errei hte maximale plastis he Bogenl�ange
betr�agt 67 %.
40

stauch8 - Level 2 - 8 proc.
0.00E+00
6.70E-01
E_v^p
10%
15%
19%
Figure 5: Freies Stau hen. Entwi klung der plastis hen Verglei hsdehnung (Darstellung
der verformten Geometrie im Originalma�stab)
12 Zusammenfassung und Ausbli k
Entspre hend der Aufgabenstellung wurde f�ur ein Finite-Elemente-Programm eine Materi-
als hnittstelle entwi kelt, wel he die Ber�u ksi htigung von Deformationsgesetzen f�ur gro�e
elastis h-plastis he Verformungen in einer verallgemeinerten Formulierung erm�ogli ht. Auf
der Basis dieses Programmes werden zuk�unftig Materialparameteridenti�kationen dur h
Analyse inhomogener Vers hiebungsfelder realisiert.
41

Bei der Herleitung wurde eine thermodynamis h konsistente Formulierung angestrebt.
Dabei kamen u.a. das Prinzip vom Maximum der plastis hen Dissipation, das Konzept
der dualen Variablen wie au h das Kovarianzprinzip zur Anwendung. Im plastis hen An-
teil des Deformationsgesetzes k�onnen neben isotroper und kinematis her Verfestigung au h
Anfangsanisotropien ber�u ksi htigt werden. Der elastis he Anteil bes hreibt ni htlinear-
hyperelastis hes Materialverhalten.
Das Deformationsgesetz wurde als Algebro-Di�erentialglei hungssystem formuliert, dessen
zeitdiskretisierte Form erfolgrei h numeris h umgesetzt wurde.
Zwei Beispiele, an denen die Eignung des entwi kelten Deformationsgesetzes zur Bere h-
nung gro�er Verformungen gezeigt werden konnte, wurden pr�asentiert. Zuk�unftige Auf-
gaben sind die Einbeziehung einer unterliegenden Substruktur [3, 7℄ und die erfolgrei he
numeris he Umsetzung eines derartigen Deformationsgesetzes.
42

Referen es
[1℄ Baltov, A., Saw zuk, A.; A rule of anisotropi hardening, A ta Me hani a 1,
1965, 81-92.
[2℄ Boehler, J.P.; Appli ations of Tensor Fun tions in Solid Me hani s, Courses and
Le tures, Vol. 292, Springer Verlag, 1987.
[3℄ Dafalias, Y.F.; Issues on the onstitutive formulation at large elastoplasti defor-
mations, Part1: Kinemati s, A ta Me hani a 69, 1987, 119-138.
[4℄ Eringen, A.C.; Me hani s of Continua, John Wiley and Sons, New York 1967.
[5℄ Haupt, P., Tsakmakis, Ch.; On the appli ation of dual variables in ontinuum
me hani s, Continuum Me hani s and Thermodynami s 1, 1989, 165-196.
[6℄ Lee, E.H.; Elasti -plasti deformation at �nite strains, Journal of applied me hani s
36, 1969, 1-6.
[7℄ Mandel, J.; Equations onstitutives et dire teurs dans les milieux plastiques et
vis oplastiques, Int. J. Solids and Stru tures 9, 1973, 725.
[8℄ D. Mi hael, M. Meisel, Some remarks to large deformation elasto-plasti ity ( ontin-
uum formulation), TU Chemnitz-Zwi kau, Preprint SFB393/98-28 (1998).
[9℄ Narasimhan, M.N.L.; Prin iples of Continuum Me hani s, John Wiley and Sons,
New York 1993.
[10℄ Simo, J.C.; A framework for �nite strain elastoplasti ity based on the maximum
plasti dissipation and the multipli ative de omposition: Part I. Continuum Formu-
lation, Computer Methods in Applied Me hani s and Engineering 66, 1988, 199-219.
[11℄ Truesdell, C., Noll, W.; The non-linear �eld theories of me hani s, se ond ed.,
Springer Verlag, Berlin, New York, Heidelberg, 1992.
43

Other titles in the SFB393 series:
99-01 P. Kunkel, V. Mehrmann, W. Rath. Analysis and numeri al solution of ontrol problems
in des riptor form. January 1999.
99-02 A. Meyer. Hierar hi al pre onditioners for higher order elements and appli ations in om-
putational me hani s. January 1999.
99-03 T. Apel. Anisotropi �nite elements: lo al estimates and appli ations (Habilitationss hrift).
January 1999.
99-04 C. Villagonzalo, R. A. R�omer, M. S hreiber. Thermoele tri transport properties in disor-
dered systems near the Anderson transition. February 1999.
99-05 D. Mi hael. Notizen zu einer geometris h motivierten Plastizit�atstheorie. Februar 1999.
99-06 T. Apel, U. Rei hel. SPC-PM Po 3D V 3.3, User's Manual. February 1999.
99-07 F. Tr�oltzs h, A. Unger. Fast solution of optimal ontrol problems in the sele tive ooling
of steel. Mar h 1999.
99-08 W. Rehm, T. Ungerer (Eds.). Ausgew�ahlte Beitr�age zum 2. Workshop Cluster-Computing
25./26. M�arz 1999, Universit�at Karlsruhe. M�arz 1999.
99-09 M. Arav, D. Hershkowitz, V. Mehrmann, H. S hneider. The re ursive inverse eigenvalue
problem. Mar h 1999.
99-10 T. Apel, S. Ni aise, J. S h�oberl. Crouzeix-Raviart type �nite elements on anisotropi
meshes. May 1999.
99-11 M. Jung. Einige Klassen iterativer Aufl�osungsverfahren (Habilitationss hrift). Mai 1999.
99-12 V. Mehrmann, H. Xu. Numeri al methods in ontrol, from pole assignment via linear
quadrati to H
1
ontrol. June 1999.
99-13 K. Bernert, A. Eppler. Two-stage testing of advan ed dynami subgrid-s ale models for
Large-Eddy Simulation on parallel omputers. June 1999.
99-14 R. A. R�omer, M. E. Raikh. The Aharonov-Bohm e�e t for an ex iton. June 1999.
99-15 P. Benner, R. Byers, V. Mehrmann, H. Xu. Numeri al omputation of de ating subspa es
of embedded Hamiltonian pen ils. June 1999.
99-16 S. V. Nepomnyas hikh. Domain de omposition for isotropi and anisotropi ellipti prob-
lems. July 1999.
99-17 T. Stykel. On a riterion for asymptoti stability of di�erential-algebrai equations. August
1999.
99-18 U. Grimm, R. A. R�omer, M. S hreiber, J. X. Zhong. Universal level-spa ing statisti s in
quasiperiodi tight-binding models. August 1999.
99-19 R. A. R�omer, M. Leadbeater, M. S hreiber. Numeri al results for two intera ting parti les
in a random environment. August 1999.
99-20 C. Villagonzalo, R. A. R�omer, M. S hreiber. Transport Properties near the Anderson
Transition. August 1999.
99-21 P. Cain, R. A. R�omer, M. S hreiber. Phase diagram of the three-dimensional Anderson
model of lo alization with random hopping. August 1999.

99-22 M. Bollh�ofer, V. Mehrmann. A new approa h to algebrai multilevel methods based on
sparse approximate inverses. August 1999.
99-23 D. S. Watkins. In�nite eigenvalues and the QZ algorithm. September 1999.
99-24 V. Uski, R. A. R�omer, B. Mehlig, M. S hreiber. In ipient lo alization in the Anderson
model. August 1999.
99-25 A. Meyer. Proje ted PCGM for handling hanging in adaptive �nite element pro edures.
September 1999.
99-26 F. Milde, R. A. R�omer, M. S hreiber. Energy-level statisti s at the metal-insulator transi-
tion in anisotropi system. September 1999.
99-27 F. Milde, R. A. R�omer, M. S hreiber, V. Uski. Criti al properties of the metal-insulator
transition in anisotropi systems. O tober 1999.
99-28 M. The�. Parallel multilevel pre onditioners for thin shell problems. November 1999.
99-29 P. Biswas, P. Cain, R. A. R�omer, M. S hreiber. O�-diagonal disorder in the Anderson
model of lo alization. November 1999.
99-30 C. Mehl. Anti-triangular and anti-m-Hessenberg forms for Hermitian matri es and pen ils.
November 1999.
99-31 A. Barinka, T. Bars h, S. Dahlke, M. Konik. Some remarks for quadrature formulas for
re�nable fun tions and wavelets. November 1999.
99-32 H. Harbre ht, C. Perez, R. S hneider. Biorthogonal wavelet approximation for the oupling
of FEM-BEM. November 1999.
99-33 C. Perez, R. S hneider. Wavelet Galerkin methods for boundary integral equations and the
oupling with �nite element methods. November 1999.
99-34 W. Dahmen, A. Kunoth, R. S hneider. Wavelet least squares methods for boundary value
problems. November 1999.
99-35 S. I. Solovev. Convergen e of the modi�ed subspa e iteration method for nonlinear eigen-
value problems. November 1999.
99-36 B. Heinri h, B. Nkemzi. The Fourier-�nite-element method for the Lam�e equations in
axisymmetri domains. De ember 1999.
99-37 T. Apel, F. Milde, U. Rei hel. SPC-PM Po 3D v 4.0 - Programmers Manual II. De ember
1999.
99-38 B. Nkemzi. Singularities in elasti ity and their treatment with Fourier series. De ember
1999.
99-39 T. Penzl. Eigenvalue de ay bounds for solutions of Lyapunov equations: The symmetri
ase. De ember 1999.
99-40 T. Penzl. Algorithms for model redu tion of large dynami al systems. De ember 1999.
00-01 G. Kunert. Anisotropi mesh onstru tion and error estimation in the �nite element
method. January 2000.
00-02 V. Mehrmann, D. Watkins. Stru ture-preserving methods for omputing eigenpairs of large
sparse skew-Hamiltonian/Hamiltonian pen ils. January 2000.
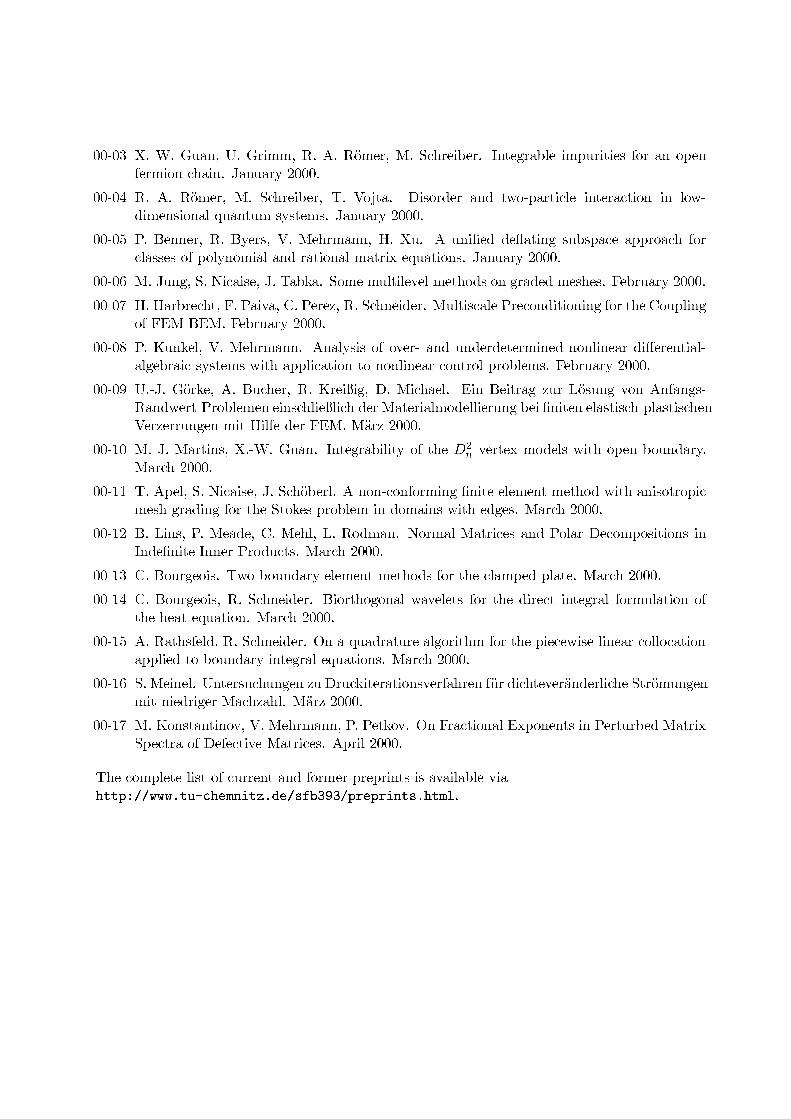
00-03 X. W. Guan, U. Grimm, R. A. R�omer, M. S hreiber. Integrable impurities for an open
fermion hain. January 2000.
00-04 R. A. R�omer, M. S hreiber, T. Vojta. Disorder and two-parti le intera tion in low-
dimensional quantum systems. January 2000.
00-05 P. Benner, R. Byers, V. Mehrmann, H. Xu. A uni�ed de ating subspa e approa h for
lasses of polynomial and rational matrix equations. January 2000.
00-06 M. Jung, S. Ni aise, J. Tabka. Some multilevel methods on graded meshes. February 2000.
00-07 H. Harbre ht, F. Paiva, C. Perez, R. S hneider. Multis ale Pre onditioning for the Coupling
of FEM-BEM. February 2000.
00-08 P. Kunkel, V. Mehrmann. Analysis of over- and underdetermined nonlinear di�erential-
algebrai systems with appli ation to nonlinear ontrol problems. February 2000.
00-09 U.-J. G�orke, A. Bu her, R. Krei�ig, D. Mi hael. Ein Beitrag zur L�osung von Anfangs-
Randwert-Problemen eins hlie�li h der Materialmodellierung bei �niten elastis h-plastis hen
Verzerrungen mit Hilfe der FEM. M�arz 2000.
00-10 M. J. Martins, X.-W. Guan. Integrability of the D
2
n
vertex models with open boundary.
Mar h 2000.
00-11 T. Apel, S. Ni aise, J. S h�oberl. A non- onforming �nite element method with anisotropi
mesh grading for the Stokes problem in domains with edges. Mar h 2000.
00-12 B. Lins, P. Meade, C. Mehl, L. Rodman. Normal Matri es and Polar De ompositions in
Inde�nite Inner Produ ts. Mar h 2000.
00-13 C. Bourgeois. Two boundary element methods for the lamped plate. Mar h 2000.
00-14 C. Bourgeois, R. S hneider. Biorthogonal wavelets for the dire t integral formulation of
the heat equation. Mar h 2000.
00-15 A. Rathsfeld, R. S hneider. On a quadrature algorithm for the pie ewise linear ollo ation
applied to boundary integral equations. Mar h 2000.
00-16 S. Meinel. Untersu hungen zu Dru kiterationsverfahren f�ur di htever�anderli he Str�omungen
mit niedriger Ma hzahl. M�arz 2000.
00-17 M. Konstantinov, V. Mehrmann, P. Petkov. On Fra tional Exponents in Perturbed Matrix
Spe tra of Defe tive Matri es. April 2000.
The omplete list of urrent and former preprints is available via
http://www.tu- hemnitz.de/sfb393/preprints.html.