Typuppgifter på TATA69studieboken.iportalen.se/images/5/5f/Tentahjälp-TATA69.pdf · lokmin....
16
1 Typuppgifter på TATA69 Hittar du något fel kan du maila mig på [email protected]. Använd dropboxlänken för att vara säker på att du har senaste versionen av detta dokument: https://www.dropbox.com/s/8bopyyzu2pwzd5p/tata69%20tentahj%C3%A4lp.pdf Förkunskaper krävs för att kunna tillämpa innehållet i dokumentet, så det är nödvändigt att man aktivt deltar i lektioner och föreläsningar under kursens gång. Lycka till! Innehåll Uppgifter av typen lokala max-/minpunkter........................................................................................... 2 Uppgifter av typen tangentplan med parallellplan. ................................................................................ 6 Uppgifter av typen trippelintegral över ≤ (, ) ≤ (, ) ≤ (, ) ≤ . ................................... 8 Uppgifter av typen Partiell Differentialekvation ................................................................................... 11
Transcript of Typuppgifter på TATA69studieboken.iportalen.se/images/5/5f/Tentahjälp-TATA69.pdf · lokmin....

1
Typuppgifter på TATA69
Hittar du något fel kan du maila mig på [email protected].
Använd dropboxlänken för att vara säker på att du har senaste versionen av
detta dokument: https://www.dropbox.com/s/8bopyyzu2pwzd5p/tata69%20tentahj%C3%A4lp.pdf
Förkunskaper krävs för att kunna tillämpa innehållet i dokumentet, så det är
nödvändigt att man aktivt deltar i lektioner och föreläsningar under kursens
gång.
Lycka till!
Innehåll Uppgifter av typen lokala max-/minpunkter. .......................................................................................... 2
Uppgifter av typen tangentplan med parallellplan. ................................................................................ 6
Uppgifter av typen trippelintegral över 𝒂 ≤ 𝒇(𝒙, 𝒚) ≤ 𝒈(𝒙, 𝒚) ≤ 𝒉(𝒙, 𝒚) ≤ 𝒃. ................................... 8
Uppgifter av typen Partiell Differentialekvation ................................................................................... 11

2
Uppgifter av typen lokala max-/minpunkter. Denna uppgift förekommer i både två och tre variabler, men metoden är densamma.
Ex. Bestäm samtliga lokala maximi- och minimipunkter till
𝑓(𝑥, 𝑦, 𝑧) = 𝑥2 + 2𝑦2 – 2𝑥𝑦 + 2𝑦𝑧 + 2
3𝑧3 .
Steg 1. Hitta alla stationära punkter:
Hitta alla stationära punkter, dvs. punkter med samtliga partiella derivator lika med noll. Dessa
punkter inkluderar max och min men även andra typer av stationära punkter, såsom sadelpunkter. Vi
vill alltså sätta de partiella derivatorna, gradienten, lika med noll.
∇𝑓 = (
𝑓𝑥′
𝑓𝑦′
𝑓𝑧′
) = (
2𝑥 − 2𝑦4𝑦 − 2𝑥 + 2𝑧
2𝑦 + 2𝑧2) = (
000)
Kontroll:
Redan här kan vi blicka tillbaka för en kontroll. Det är lätt att missa en term vid partiell derivering.
Kontrollera därför att antalet termer i partiella derivatan för x (Här: 2), är samma som antalet termer
innehållandes x i det givna uttrycket för f (Här: 2) och pss för y och z. (Anm. denna kontroll gäller
givetvis inte vid derivering mha. kvotregel eller produktregel).
Följande ekvationssystem ger alltså lösningar för stationära punkter (𝑥, 𝑦, 𝑧):
{
2𝑥 − 2𝑦4𝑦 − 2𝑥 + 2𝑧
2𝑦 + 2𝑧2
= 0= 0= 0
⇔ {
𝑥 − 𝑦2𝑦 − 𝑥 + 𝑧
𝑦 + 𝑧2
= 0= 0= 0
⇔ {
𝑥2𝑦 − 𝑦 + 𝑧
𝑦 + 𝑧2
= 𝑦= 0= 0
⇔ {
𝑥𝑦
−𝑧 + 𝑧2
= 𝑦= −𝑧= 0
⇔
↔ {
𝑥𝑦
𝑧(−1 + 𝑧)
= 𝑦= −𝑧= 0
⇔
{
{
𝑥𝑦𝑧
= 0= 0= 0
𝑒𝑙𝑙𝑒𝑟
{𝑥𝑦𝑧
= −1= −1= 1
Steg 2: Avgör respektive stationär punkts karaktär mha Kvadratisk form:
Precis som att tecknet(+/-) på andraderivatan i en variabel berättar om vändpunktens karaktär, gäller i
flera variabler att matrisen av andraderivator berättar om den stationära punktens karaktär. Närmare
bestämt, tecknet på dess kvadratiska form Q anger karaktären. (Anledningen är att Q anger
andraderivatans inverkan på värden med avståndet (h, k, l) ifrån punkten (x, y, z) infinitesimalt nära,
där vi redan bestämt att gradienten ej har inverkan).
𝑄 = (ℎ 𝑘 𝑙)(
𝑓𝑥𝑥′′ 𝑓𝑦𝑥
′′ 𝑓𝑧𝑥′′
𝑓𝑥𝑦′′ 𝑓𝑦𝑦
′′ 𝑓𝑧𝑦′′
𝑓𝑥𝑧′′ 𝑓𝑦𝑧
′′ 𝑓𝑧𝑧′′
)(ℎ𝑘𝑙)

3
Vilket i vårat exempel ger:
𝑄 = (ℎ 𝑘 𝑙) (2 −2 0−2 4 20 2 4𝑧
)(ℎ𝑘𝑙)
Kontroll:
I föregående steg kan {
𝑓𝑥𝑦′′
𝑓𝑥𝑧′′
𝑓𝑦𝑧′′
===
𝑓𝑦𝑥′′
𝑓𝑧𝑥′′
𝑓𝑧𝑦′′
användas för att snabba upp processen. Detta är praktiskt om man är i
tidsnöd. Om man däremot tar sig tiden att beräkna dem separat, alltså derivera i båda ordningarna, och
får likadana uttryck genom båda, får man bekräftat att man sannolikt har räknat rätt.
Skriver ut med matrismultiplikation:
𝑄 = 2ℎ2 − 2ℎ𝑘 + 0ℎ𝑙 − 2𝑘ℎ + 4𝑘2 + 2𝑘𝑙 + 0𝑙ℎ + 2𝑙𝑘 + 4𝑧𝑙2
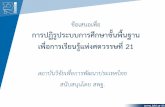
Minnesregel för multiplicering med ℎ, 𝑘, 𝑙 vektorerna:
ℎℎ 2
𝑘 𝑙−2 0
𝑘 −2𝑙 0
4 22 4𝑧
Bilden försöker visa att Exempelvis skapas hk-termer i rad 2 kolumn 1 och rad 1 kolumn 2.
Åter till ekvationen. Förenklar:
𝑄 = 2ℎ2 − 4ℎ𝑘 + 4𝑘2 + 4𝑘𝑙 + 4𝑧𝑙2
Undersöker först stationära punkten (0,0,0). Stoppar alltså in 𝑧 = 0 (𝑜𝑐ℎ 𝑥 = 0, 𝑦 =
0 𝑜𝑚 𝑑𝑒 ℎ𝑎𝑑𝑒 𝑏𝑒ℎö𝑣𝑡𝑠).
𝑄 = 2ℎ2 − 4ℎ𝑘 + 4𝑘2 + 4𝑘𝑙
Kvadratkompletterar i avsikt att bli av med icke kvadrattermer – för att således bli säker på termernas
tecken.
2ℎ2 − 4ℎ𝑘 = 2(ℎ2 − 2ℎ𝑘) = 2(ℎ − 𝑘)2 − 2𝑘2
𝑄 = 2ℎ2 − 4ℎ𝑘 + 4𝑘2 + 4𝑘𝑙 = 2(ℎ − 𝑘)2 − 2𝑘2 + 4𝑘2 + 4𝑘𝑙 = 2(ℎ − 𝑘)2 + 2𝑘2 + 4𝑘𝑙
Kvadratkompletterar igen:
2𝑘2 + 4𝑘𝑙 = 2(𝑘2 + 2𝑘𝑙) = 2((𝑘 + 𝑙)2 − 𝑙2) = 2(𝑘 + 𝑙)2 − 2𝑙2

4
𝑄 = 2(ℎ − 𝑘)2 + 2(𝑘 + 𝑙)2 − 2𝑙2
Nu skall vi slutligen försöka avgöra om 𝑄 är strikt positivt, negativt, eller om det beror på (ℎ, 𝑘, 𝑙).
Indefinit: Om vi hittar (ℎ, 𝑘, 𝑙) sådana att Q blir strikt negativt och andra (ℎ, 𝑘, 𝑙) sådana att Q
blir strikt positivt har vi visat att den är indefinit, och punkten är således inte lokmax eller
lokmin.
Positivt Definit: Om det framgår att Q alltid är strikt större än 0 för alla (ℎ, 𝑘, 𝑙) utom origo.
Punkten är då lokmin.
Negativt Definit: Om det framgår att Q alltid är strikt mindre än 0 för alla (ℎ, 𝑘, 𝑙) utom
origo. Punkten är då lokmax.
(Notera att positivt definit, något kontraintuitivt, ger lokalt minimum, och likadant för negativt
definit konstigt nog maximum. Om du undrar varför men inte söker det strikta beviset går
anledningen att jämföra med att exempelvis en envariabelfunktion med negativ andragradterm
har lokalt maximum, exempelvis 𝑓(𝑥) = −3𝑥2 )
I vårt tidigare exempel framgår ej tydligt negativt eller positivt definit. Gissningsvis är det indefinit.
Klura på om respektive term kan anta positiva, 0, eller negativa värden och under vilka kriterier. Gör
prövning av olika värden. Om vi kan hitta ett exempel (h, k, l) som ger Q>0 och ett annat som ger Q<0
betyder det som misstänkt att det är indefinit. Först kan man bara pröva ett valfritt (h, k, l), t.ex (1, 1,
0).
Undersöker 𝑄(1, 1, 0) = 0 + 2(1)2 − 0 = 2 > 0
Söker nu ett 𝑄 < 0, alltså där −2𝑙2 , den enda negativa termen, ”vinner”.
ℎ = 𝑘 eliminerar första termen. 𝑘 = −𝑙 eliminerar andra. Endast den sista, negativa termen återstår
om 𝑙 ≠ 0. Exempelvis 𝑙 = 1, 𝑘 = −𝑙 = −1, ℎ = 𝑘 = −1.
Undersöker 𝑄(−1,−1, 1) = 0 + 0 − 2(1)2 = −1 < 0
𝑄 är följaktligen indefinit när z=0. Alltså är (0,0,0) inte ett lokalt maximum eller minimum och
behöver alltså inte omnämnas i svaret.
Kontroll:
Pröva ditt svar genom insättning av värdena (ℎ, 𝑘, 𝑙) ≠ (0,0,0) i ursprungliga Q och jämföra med
kvadratkompletterade Q. Denna kontroll går även att göra någorlunda vid påståendet positivt definit
med godtyckliga enkla värden (ℎ, 𝑘, 𝑙) ≠ (0,0,0) och skall då bara producera positiva värden.
Motsvarande skall kontrollen ge negativa värden vid neg def.
Insättning av z=1ger med samma metod som för föregående punkt att
𝑄 = 2ℎ2 − 4ℎ𝑘 + 4𝑘2 + 4𝑘𝑙 + 4𝑙2 = ⋯ = 2(ℎ − 𝑘)2 + 2(𝑘 + 𝑙)2 + 2𝑙2

5
Enkelt inses nu att 𝑄 ≥ 0 då den består av positiva kvadrattermer, men det behöver visas att 𝑄 ≠
0 𝑑å (ℎ, 𝑘, 𝑙) ≠ (0, 0, 0).
Antag 𝑄 = 0. Detta ger enligt analys av föregående ekvation med enbart positiva kvadrattermer att:
{𝑙 = 0
𝑘 + 𝑙 = 0ℎ − 𝑘 = 0
⇔ {𝑙 = 0𝑘 = 0
ℎ − 𝑘 = 0⇔ {
𝑙 = 0𝑘 = 0ℎ = 0
. Alltså (0, 0, 0= som enda lösning till Q=0.
𝑄 > 0 𝑑å (ℎ, 𝑘, 𝑙) ≠ (0, 0, 0). f Positivt definit i (-1, -1, 1). Vilket ger lokalt minimum.
Svar: Funktionen f har lokalt minimum i (-1, -1, 1)

6
Uppgifter av typen tangentplan med parallellplan.
Ex. Bestäm alla plan som tangerar ytan 𝒙𝟒 + 𝒚𝟐 − 𝒛𝟐 = 𝟏 och är parallella med planet
𝟐𝒙 + 𝒚 + 𝒛 = 𝟏.
(Obs. Konstanterna är i just detta exempel båda 1, men måste inte båda vara samma konstant.)
Vi börjar med att namnge de givna ytorna. Vi kallar den givna böjda ytan 𝑓 = 𝑥4 + 𝑦2 − 𝑧2 = 1 och
parallellplanet 𝑔 = 2𝑥 + 𝑦 + 𝑧 = 1. Det sökta planet är som sagt parallellt med det linjära planet 𝑔 =
1. Att två linjära plan är parallella innebär att de bara skiljer sig med en konstantterm, och våra sökta
plan kan således skrivas på formen 𝑔 = 𝐶. Uppgiften går alltså ut på att reda ut vilka C som uppfyller
övriga villkor.
Villkoret ”tangerar f” kan delas in i två mindre villkor:
- f parallellt med g i någon en punkt i x, y, z rummet, låt oss kalla själva tangeringspunkten (a,b,c).
- Punkten (a, b, c) ligger på nivåytan f=1. (där 1 bara gäller detta exempel)
Från (a, b, c) genereras ett värde på C med följande villkor:
Punkten (a, b, c) ligger på nivåytan g=C. (där flera C genereras vid existens av flera (a, b, c))
Steg 1: Ta reda på i vilka punkter f är parallell med g.
f är parallell g i en viss punkt a,b,c är samma sak som att deras normalvektorer pekar i samma
riktning, vilket är ekvivalent med att den ena normalvektorn kan beskrivas som en konstant, k, gånger
den andras normalvektor, ty multiplicering med konstant ändar vektorlängd men ej riktning. Det ser
alltså ut så här i vårat exempel:
∇𝑓(𝑥, 𝑦, 𝑧) = (
𝑓𝑥′
𝑓𝑦′
𝑓𝑧′
) = (4𝑥3
2𝑦−2𝑧
) ⇒ ∇𝑓(𝑎, 𝑏, 𝑐) = (4𝑎3
2𝑏−2𝑐
)
∇𝑔(𝑥, 𝑦, 𝑧) = (
𝑔𝑥′
𝑔𝑦′
𝑔𝑧′
) = (211) ⇒ ∇𝑔(𝑎, 𝑏, 𝑐) = (
211)
∇𝑓(𝑎, 𝑏, 𝑐)||∇𝑔(𝑎, 𝑏, 𝑐) ⇔ (4𝑎3
2𝑏−2𝑐
) = 𝑘 ∗ (211) ⇔
{4𝑎3
2𝑏−2𝑐
===
2𝑘𝑘𝑘
Ur det erhållna ekvationssystemet löser vi ut a, b, c i termer av k. I mer komplicerade fall kan
processen förenklas mha gausseliminering. I detta fall kan vi lösa det som ett vanligt ekvationssystem
utan problem och vi får:

7
{
𝑎 = √
𝑘
2
3
𝑏 =𝑘
2
𝑐 =−𝑘
2
f är alltså parallell g i denna/dessa punkt(er) (a, b, c).
Steg 2: Se till att punkten (a,b,c) ligger på nivåytan f=1.
Insättning av (a,b,c) i f=1 ger oss:
𝑓(𝑎, 𝑏, 𝑐) = 𝑎4 + 𝑏2 − 𝑐2 = 1 ⇔
𝑓(𝑎, 𝑏, 𝑐) = √𝑘
2
3
4
+ (𝑘
2)2
− (−𝑘
2)2
= 1 ⇔
𝑓(𝑎, 𝑏, 𝑐) = √𝑘
2
3
4
= 1 ⇔ 𝑘 = ±2
a, b, c blir då med insättning av k=±2 i tidigare lösningar a,b,c:
{
𝑎 = √
±2
2
3
= ±1
𝑏 =±2
2= ±1
𝑐 =∓2
2= ∓1
Alltså i detta fall 2 tangentplan.
Steg 3: Se till att punkten (a,b,c) ligger på nivåytan g=C.
Insättning av (a,b,c)=(1,1,-1) i 𝑔 = 𝐶1 ger oss:
𝑔 = 2 ∙ 1 + 1 + (−1) = 𝐶1 ⇒ 𝐶1 = 2
Insättning av (a,b,c)=(-1,-1,1) i 𝑔 = 𝐶2 ger oss:
𝑔 = 2 ∙ (−1) − 1 + 1 = 𝐶2 ⇒ 𝐶2 = −2
Svar: 2𝑥 + 𝑦 + 𝑧 = 2 och 2𝑥 + 𝑦 + 𝑧 = −2

8
Uppgifter av typen trippelintegral över 𝒂 ≤ 𝒇(𝒙, 𝒚) ≤ 𝒈(𝒙, 𝒚) ≤
𝒉(𝒙, 𝒚) ≤ 𝒃. Denna uppgift förekommer i både två och tre variabler, men metoden är densamma.
Ex. Beräkna ∭(𝒙 − 𝒚)𝒅𝒙𝒅𝒚𝒅𝒛,
Där D ges av 𝟎 ≤ 𝒙 + 𝒚 ≤ 𝒚 + 𝒛 ≤ 𝒙 − 𝟑𝒛 ≤ 𝟏.
Steg 1. Förenkla gränserna genom variabelbyte:
Sätt u=uttrycket i första olikheten, v=nästa uttryck, w=sista:
{𝑢 = 𝑥 + 𝑦𝑣 = 𝑦 + 𝑧𝑤 = 𝑥 − 3𝑧
Vilket ger D: 0 ≤ 𝑢 ≤ 𝑣 ≤ 𝑤 ≤ 1.
För att byta variabler på integranden (𝑥 − 𝑦) , om det inte framgår tydligt hur det uttrycks i u, v, w,
kan man i invertera variabelbytet. Det innebär att lösa ut x, y, z som funktioner av u, v, w. I detta fall
räcker det att lösa ut x och y (alternativt direkt söka x-y). Här följer ett förslag på hur de kan lösas ut i
vårat exempel:
{𝑢 = 𝑥 + 𝑦𝑣 = 𝑦 + 𝑧𝑤 = 𝑥 − 3𝑧
⇔{
𝑦 = 𝑢 − 𝑥𝑧 = 𝑣 − 𝑦𝑥 = 𝑤 + 3𝑧
⇔ {
𝑦 = 𝑢 − 𝑥𝑧 = 𝑣 − 𝑦𝑥 = 𝑤 + 3(𝑣 − 𝑦)
⇔ {
𝑦 = 𝑢 − 𝑥𝑧 = 𝑣 − 𝑦𝑥 = 𝑤 + 3(𝑣 − (𝑢 − 𝑥))
⇔ {
𝑦 = 𝑢 − 𝑥𝑧 = 𝑣 − 𝑦𝑥 = 𝑤 + 3𝑣 − 3𝑢 + 3𝑥
⇔ {2𝑦 = 2𝑢 − 2𝑥𝑧 = 𝑣 − 𝑦−2𝑥 = 𝑤 + 3𝑣 − 3𝑢
⇔ {2𝑦 = 2𝑢 + 𝑤 + 3𝑣 − 3𝑢𝑧 = 𝑣 − 𝑦−2𝑥 = 𝑤 + 3𝑣 − 3𝑢
⇔ {2𝑦 = 2𝑢 + 𝑤 + 3𝑣 − 3𝑢𝑧 = 𝑣 − 𝑦−2𝑥 = 𝑤 + 3𝑣 − 3𝑢
⇔
{
𝑦 =
−𝑢 + 𝑤 + 3𝑣
2𝑧 = 𝑣 − 𝑦
𝑥 =−𝑤 − 3𝑣 + 3𝑢
2
Kontroll:
Om variabelbytet inverteras fullständigt, dvs om vi även löser ut z(u,v,w) kan inversen kontrolleras,
exempelvis genom att sätta in x(u, v, w), y(u, v, w), z(u, v, w) i det ursprungliga ekvationssystemet där
u, v, w var utlösta. Om man efter förenkling får u=u, v=v, w=w har inverteringen skett felfritt.
Steg 2. Integranden (funktionen i integralen) kan nu beräknas:
(𝑥 − 𝑦) =−𝑤 − 3𝑣 + 3𝑢
2−−𝑢 + 𝑤 + 3𝑣
2= 2𝑢 − 3𝑣 − 𝑤
Steg 3. Beräkna Lokala Volym Skalan:

9
Beräkna absolutbeloppet av en funktionaldeterminant, dvs, absolutbeloppet av determinanten av de
partiella derivatorna till variabelbytet i valfri riktning. Vi väljer i detta fall att använda det ursprungliga
variabelbytet där (𝑢, 𝑣, 𝑤) beror av (𝑥, 𝑦, 𝑧):
𝜕(𝑢, 𝑣, 𝑤)
𝜕(𝑥, 𝑦, 𝑧)= |𝑑𝑒𝑡 (
𝑢𝑥′ 𝑢𝑦
′ 𝑢𝑧′
𝑣𝑥′ 𝑣𝑦
′ 𝑣𝑧′
𝑤𝑥′ 𝑤𝑦
′ 𝑤𝑧′
)| = |𝑑𝑒𝑡 (1 1 00 1 11 0 −3
)| =
= |(1 ∙ 1 ∙ −3 + 0 ∙ 0 ∙ 0 + 1 ∙ 1 ∙ 1) − (1 ∙ 1 ∙ 0 + 1 ∙ 0 ∙ 1 + 0 ∙ 1 ∙ −3)| = |−2 − 0| = 2
Kompenserar mha omskrivning för att vi valde ”den andra riktningens” funktionaldeterminant:
𝑑𝑥𝑑𝑦𝑑𝑧 = |𝜕(𝑥, 𝑦, 𝑧)
𝜕(𝑢, 𝑣, 𝑤)| 𝑑𝑢𝑑𝑣𝑑𝑤 =
1
|𝜕(𝑢, 𝑣, 𝑤)𝜕(𝑥, 𝑦, 𝑧)
|𝑑𝑢𝑑𝑣𝑑𝑤 =
1
2𝑑𝑢𝑑𝑣𝑑𝑤
Steg 4. Ställ upp integralen:
Gränserna enligt skivor i vw planet är överlägset att föredra. Då behöver man inte tänka efter utan
gränserna blir alltid i denna typuppgift följande:
Då D ges av
∫ ∫ ∫
𝑤=𝑏
𝑤=𝑣
𝑣=𝑏
𝑣=𝑢
𝑢=𝑏
𝑢=𝑎
𝑎 ≤ 𝑢 ≤ 𝑣 ≤ 𝑤 ≤ 𝑏
I vårat fall är a=0 och b=1. Integranden och lokala volymskalan får inte glömmas:
∫ ∫ ∫ (2𝑢 − 3𝑣 − 𝑤) ∙1
2𝑑𝑤𝑑𝑣𝑑𝑢
𝑤=1
𝑤=𝑣
𝑣=1
𝑣=𝑢
𝑢=1
𝑢=0
Steg 5. Räkna ut Integralen:
Integralen beräknas därefter som vanligt, nedan följer ett förslag:
∫ ∫ ∫ (2𝑢 − 3𝑣 − 𝑤) ∙1
2𝑑𝑤𝑑𝑣𝑑𝑢
𝑤=1
𝑤=𝑣
𝑣=1
𝑣=𝑢
𝑢=1
𝑢=0
=1
2∫ ∫ [2𝑢𝑤 − 3𝑣𝑤 −
𝑤2
2]𝑤=𝑣
𝑤=1
𝑑𝑣𝑑𝑢
𝑣=1
𝑣=𝑢
𝑢=1
𝑢=0
=1
2∫ ∫ 2𝑢 − 3𝑣 −
12
2− (2𝑢𝑣 − 3𝑣2 −
𝑣2
2)𝑑𝑣𝑑𝑢
𝑣=1
𝑣=𝑢
𝑢=1
𝑢=0
=1
2∫ ∫ 2𝑢 − 3𝑣 −
1
2− 2𝑢𝑣 +
7𝑣2
2)𝑑𝑣𝑑𝑢 =
𝑣=1
𝑣=𝑢
𝑢=1
𝑢=0

10
1
2∫ [2𝑢𝑣 −
3𝑣2
2−𝑣
2− 𝑢𝑣2 +
7𝑣3
6]𝑣=𝑢
𝑣=1
𝑑𝑢
𝑢=1
𝑢=0
=1
2∫ 2𝑢 ∙ 1 −
3 ∙ 12
2−1
2− 𝑢 ∙ 12 +
7 ∙ 13
6− (2𝑢2 −
3𝑢2
2−𝑢
2− 𝑢3 +
7𝑢3
6)𝑑𝑢
𝑢=1
𝑢=0
=1
2∫ −
5
6+3𝑢
2−𝑢2
2−𝑢3
6𝑑𝑢
𝑢=1
𝑢=0
=1
2∙ [−
5𝑢
6+3𝑢2
4−𝑢3
6−𝑢4
24]𝑢=0
𝑢=1
=1
2(−
5 ∙ 1
6+3 ∙ 12
4−13
6−14
24− (−
5 ∙ 0
6+3 ∙ 02
4−03
6−04
24))
=1
2(−
5
6+3
4−1
6−1
24) =
1
2∙ (−
20
24+18
24−4
24−1
24) = −
7
48
Svar: −𝟕
𝟒𝟖

11
Uppgifter av typen PDE (Partiell Differentialekvation). Denna uppgift förekommer med både partiella förstaderivator och andraderivator, där steg 3-4
kan hoppas över för PDE utan andraderivator och steg 7 kan hoppas över för PDE utan
bivillkor.
Ex. Bestäm alla 𝑪𝟐-lösningar 𝒛(𝒙, 𝒚) till differentialekvationen
𝒚𝒛𝒚𝒚′′ − 𝒙𝒛𝒙𝒚
′′ + 𝒛𝒚′ = 𝒙, 𝒙 > 0,
Under bivillkoren 𝒛(𝟏, 𝒚) = 𝒚𝟐 + 𝟏, 𝒛(𝒙, 𝟎) = 𝒙 t.ex. genom att göra variabelbytet
𝒖 = 𝒙, 𝒗 = 𝒙𝒚
I denna typ av uppgift behöver vi en formel för att byta uttrycka en partiell derivata i nya variabler.
Denna formel kallas kedjeregeln i flera variabler och ser ut så här om vi vill uttrycka funktionen’s
partiella x respektive y derivata i nya variabler u och v:
𝑓𝑥′ = 𝑢𝑥
′ 𝑓𝑢′ + 𝑣𝑥
′𝑓𝑣′
𝑓𝑦′ = 𝑢𝑦
′ 𝑓𝑢′ + 𝑣𝑦
′𝑓𝑣′
Steg 1. Ta fram 𝒖𝒙′ , 𝒖𝒚
′ , 𝒗𝒙′ , 𝒗𝒚
′ :
Det föreslagna variabelbytet kommer alltid vara korrekt att använda, det visar sig riggat att göra
uppgiften möjlig att lösa. Målet är alltså ta de partiella derivatorna som finns i ekvationen (i detta
exempel 𝑧𝑦𝑦′′ , 𝑧𝑥𝑦
′′ , 𝑧𝑦′ ) och uttrycka dem i partiella derivator map u och v istället.
Innan vi ger oss på kedjeregeln ser vi dock att den genererar 𝑢𝑥′ , 𝑢𝑦
′ , 𝑣𝑥′ , 𝑣𝑦
′ vilka vi redan nu kan lösa ut
ur variabelbytet. Som vanligt för partiell derivering behandlas x som konstant då vi deriverar map y
och vice versa.
𝑢 = 𝑥 →𝑢𝑥′ = 1
𝑢𝑦′ = 0
𝑣 = 𝑥𝑦 →𝑣𝑥′ = 𝑦
𝑣𝑦′ = 𝑥
Steg 2. Ta fram 𝒛𝒙′ , 𝒛𝒚
′ :
Nu har vi alla ingredienser för att uttrycka 𝑧𝑥′ och 𝑧𝑦
′ som 𝑧𝑢′ och 𝑧𝑣
′ vilket är det första steget mot 𝑧𝑥𝑦′′ .
I kedjeregeln blir alltså f vår funktion z, och vi kan ersätta 𝑢𝑥′ , 𝑢𝑦
′ , 𝑣𝑥′ , 𝑣𝑦
′ med uttrycken från Steg 1:
𝑓𝑥′ = 𝑢𝑥
′ 𝑓𝑢′ + 𝑣𝑥
′𝑓𝑣′ 𝑙å𝑡 𝑓 = 𝑧 → 𝑧𝑥
′ = 𝑢𝑥′ 𝑧𝑢
′ + 𝑣𝑥′𝑧𝑣′ = 1 ∙ 𝑧𝑢
′ + 𝑦 ∙ 𝑧𝑣′ = 𝑧𝑢
′ + 𝑦𝑧𝑣′
𝑓𝑦′ = 𝑢𝑦
′ 𝑓𝑢′ + 𝑣𝑦
′𝑓𝑣′ 𝑙å𝑡 𝑓 = 𝑧 → 𝑧𝑦
′ = 𝑢𝑦′ 𝑧𝑢
′ + 𝑣𝑦′𝑧𝑣′ = 0 ∙ 𝑧𝑢
′ + 𝑥 ∙ 𝑧𝑣′ = 𝑥𝑧𝑣
′
Det bör dock noteras att man kan stoppa in mer komplicerade funktioner att ersätta f i kedjeregeln och
den gäller fortfarande. När man blir bekväm med att använda kedjeregeln behöver man inte längre

12
skriva upp steget ”𝑓𝑥′ = 𝑢𝑥
′ 𝑓𝑢′ + 𝑣𝑥
′𝑓𝑣′ 𝑙å𝑡 𝑓 = 𝑧 ”. Nu har vi alltså lyckats uttrycka förstaderivatorna i
de nya variablerna:
𝑧𝑥′ = 𝑧𝑢
′ + 𝑦𝑧𝑣′
𝑧𝑦′ = 𝑥𝑧𝑣
′
Vi väntar dock med att byta ut y och x till nya variabler, det visar sig förenkla nästa steg.
Steg 3.(endast när uppgiften har andraderivator) Sätt in de kända förstaderivatorna i
andraderivatorna:
I vårat exempel behövs givetvis bara 𝑧𝑦𝑦′′ , 𝑧𝑥𝑦
′′ . Eftersom det alltid gäller att 𝑧𝑥𝑦′′ = 𝑧𝑦𝑥
′′ för en 𝐶2
funktion har vi snart valmöjligheten att ta fram den som verkar vara lättast. Mer specifikt kan vi välja
på att reda ut:
𝑧𝑥𝑦′′ = (𝑧𝑥
′ )𝑦′ = (𝑧𝑢
′ + 𝑦𝑧𝑣′ )𝑦′
eller
𝑧𝑥𝑦′′ = 𝑧𝑦𝑥
′′ = (𝑧𝑦′ )𝑥
′= (𝑥𝑧𝑣
′ )𝑥′
varpå vi väljer det senare alternativet med bara en term.
För 𝑧𝑦𝑦′′ får vi på samma sätt
𝑧𝑦𝑦′′ = (𝑧𝑦
′ )𝑦
′= (𝑥𝑧𝑣
′ )𝑦′
Kontroll:
Vill man kunna kontrollera sig själv kan man öva på att ta fram både 𝑧𝑦𝑥′′ och 𝑧𝑥𝑦
′′ och jämföra att de
verkligen blir samma för att minimera risken för slarvfel.
Steg 4. (endast när uppgiften har andraderivator) Separera eventuella produkter och tillämpa
kedjeregeln igen:
Vi börjar med att reda ut
𝑧𝑥𝑦′′ = (𝑥𝑧𝑣
′ )𝑥′
Det är nu det praktiska med att vi inte bytt variabler kommer in. Det går att låta 𝑓 = 𝑥𝑧𝑣′ redan nu och
använda kedjeregeln men vi undviker mycket krångel genom att göra oss kvitt faktorn x redan nu.
Gamla hederliga produktregeln tillåter omskrivningen:
𝑧𝑥𝑦′′ = (𝑥𝑧𝑣
′ )𝑥′ = (𝑥)𝑥
′ 𝑧𝑣′ + 𝑥((𝑧𝑣
′ )𝑥′ ) = 1 ∙ 𝑧𝑣
′ + 𝑥((𝑧𝑣′ )𝑥′ )
Låt oss undersöka uttrycket. Termen 𝑧𝑣′ är redan färdig, vi ville ju ha derivator map de nya variablerna.
Faktorn x i den andra termen är lätt att växla mellan nya och gamla variabler. Faktorn ((𝑧𝑣′ )𝑥′ ) kräver
dock att vi använder kedjeregeln ytterligare en gång. Denna gång låter vi dock f=𝑧𝑣′ eftersom det är
funktionen som tagit f s plats i grundformeln:
𝑓𝑥′ = 𝑢𝑥
′ 𝑓𝑢′ + 𝑣𝑥
′𝑓𝑣′ 𝑙å𝑡 𝑓 = (𝑧𝑣
′ ) → (𝑧𝑣′ )𝑥′ = 𝑢𝑥
′ (𝑧𝑣′ ) 𝑢
′ + 𝑣𝑥′(𝑧𝑣
′ ) 𝑣′ = 1 ∙ (𝑧𝑣
′ ) 𝑢′ + 𝑦 ∙ (𝑧𝑣
′ ) 𝑣′
= 𝑧𝑣𝑢′′ + 𝑦𝑧𝑣𝑣
′′

13
Insättning i föregående uttryck för 𝑧𝑥𝑦′′ ger:
𝑧𝑥𝑦′′ = 𝑧𝑣
′ + 𝑥(𝑧𝑣𝑢′′ + 𝑦𝑧𝑣𝑣
′′ )
Vi går igenom samma procedur för att reda ut 𝑧𝑦𝑦′′ .
𝑧𝑦𝑦′′ = (𝑥𝑧𝑣
′ )𝑦′ = (𝑥)𝑦
′ 𝑧𝑣′ + 𝑥((𝑧𝑣
′ )𝑦′ ) = 0 ∙ 𝑧𝑣
′ + 𝑥((𝑧𝑣′ )𝑦′ )
kedjeregeln:
𝑓𝑥′ = 𝑢𝑥
′ 𝑓𝑢′ + 𝑣𝑥
′𝑓𝑣′ 𝑙å𝑡 𝑓 = (𝑧𝑣
′ ) → (𝑧𝑣′ )𝑦′ = 𝑢𝑦
′ (𝑧𝑣′ ) 𝑢
′ + 𝑣𝑦′ (𝑧𝑣
′ ) 𝑣′ = 0 ∙ (𝑧𝑣
′ ) 𝑢′ + 𝑥 ∙ (𝑧𝑣
′ ) 𝑣′ = 𝑥𝑧𝑣𝑣
′′
Insättning i föregående uttryck för 𝑧𝑦𝑦′′ ger:
𝑧𝑦𝑦′′ = 𝑥(𝑥𝑧𝑣𝑣
′′ ) = 𝑥2𝑧𝑣𝑣′′
Steg 5. Översätt Differentialekvationen till nya variabler:
𝑦𝑧𝑦𝑦′′ − 𝑥𝑧𝑥𝑦
′′ + 𝑧𝑦′ = 𝑥, 𝑥 > 0
Blir med allt vi kommit fram till:
𝑦𝑥2𝑧𝑣𝑣′′ − 𝑥(𝑧𝑣
′ + 𝑥(𝑧𝑣𝑢′′ + 𝑦𝑧𝑣𝑣
′′ )) + 𝑥𝑧𝑣′ = 𝑥, 𝑥 > 0
Detta är anledningen till att vi följer förslaget på variabelbyte, samt anledningen att vi avvaktat så
länge med att byta ut variablerna på de vanliga x:en och y:na. I detta steg är det riggat att stora delar
skall ta ut varandra – annars är framstår diffekvationen fortfarande som olöslig och man vet att man
har gjort något fel. Men – det ser ljust ut i vårat exempel, vi förenklar:
𝑦𝑥2𝑧𝑣𝑣′′ − 𝑥𝑧𝑣
′ − 𝑥2𝑧𝑣𝑢′′ − 𝑥2𝑦𝑧𝑣𝑣
′′ + 𝑥𝑧𝑣′ = 𝑥, 𝑥 > 0 ↔
−𝑥2𝑧𝑣𝑢′′ = 𝑥, 𝑥 > 0
Nu är det äntligen dags att byta allt till nya variabler och sätta 𝑧𝑣𝑢′′ på ensam sida. x=u ger:
−𝑢2𝑧𝑣𝑢′′ = 𝑢, 𝑢 > 0 ↔
𝑧𝑣𝑢′′ =
−1
𝑢, 𝑢 > 0
𝑢 > 0 gav att vi slapp dela med noll, trevligt.
Steg 6. Integrera fram en generell lösning:
Nu behöver vi integrera för att lösa ut z, istället för 𝑧𝑣𝑢′′ . Även här kan man pröva att integrera fram z
ur 𝑧𝑣𝑢′′ eller 𝑧𝑢𝑣
′′ och bör erhålla samma lösning. Vi väljer godtyckligt 𝑧𝑢𝑣′′
𝑧𝑢𝑣′′ = (𝑧𝑢
′ )𝑣′ =
−1
𝑢

14
Vanlig integrering hade gett att
∫(𝑧𝑢′ )𝑣′ 𝑑𝑣 = ∫
−1
𝑢𝑑𝑣 =
−𝑣
𝑢+ 𝐶
Men det visar sig attvid partiell integration går det lite anorlunda till:
𝑧𝑢′ =
−𝑣
𝑢+ 𝑔(𝑢)
När man partialintegrerar map exempelvis v behöver man alltså lägga till en funktion g(u) istället för C
och vi undviker dessutom att skriva ut 𝑧𝑢′ = ∫(𝑧𝑢
′ )𝑣′ 𝑑𝑣 eftersom det indikerar vanlig integrering
snarare en partiell. Anledningen att man lägger till 𝑔(𝑢) att alla uttryck 𝑔(𝑢) består endast av
konstanter och u-beroende uttryck villka behandlas som konstanter och försvinner om man försöker
partialderivera tillbaka till 𝑧𝑢𝑣′′ , pröva gärna själv. Med andra ord är
−𝑣
𝑢 en lösning på 𝑧𝑢
′ och 𝑔(𝑢)
hjälper oss att få tag på alla lösningar.
Kanske inte helt oväntat måste vi nu partialintegrera map u. Först kan vi termvis plocka fram en
lösning på primitiverna, dvs de ”vanliga” integralerna, men utan konstanten C:
∫−𝑣
𝑢𝑑𝑢 = −𝑣ln(𝑢)
∫𝑔(𝑢) 𝑑𝑢 = 𝐺(𝑢)
G(u) betecknar ju primitiven till g(u), det är dock bra att använda just bokstaven stora G, för att visa
att G är deriverbar map u, så att g(u) blir resultatet. Likasom vid föregående partialintegrering slår vi
samman dessa och lägger på en ny funktion, denna gång H(v). ”H” eftersom bokstaven ”G” är
upptagen och ”(v)”eftersom vi nu partialintegrerat map u vilket innebär att v då behandlas som
konstant. Vi får alltså i nya variabler den generella lösningen:
𝑧 = −vln(𝑢) + 𝐺(𝑢) + 𝐻(𝑣)
Men även om de nya variablerna är föreslagna som ett bra sätt att komma fram till lösningen skall
svaret ges i de samma variablerna som PDE presenterats i nämligen x, y. Bivillkor om så finns kan
heller inte användas på nya variabler. u=x, v=xy ger:
𝑧 = −xyln(𝑥) + 𝐺(𝑥) + 𝐻(𝑥𝑦)
Där G och H är 𝐶2 funktioner av en variabel – vilket bör poängteras annars riskerar man avdrag.
Steg 7.(endast när bivillkor ges i uppgiften) Ta reda på 𝑮(𝒖),𝑯(𝒗), genom bivillkor:
Tricket är att sätta in de kända villkoren för att lösa ut G och H. Låt oss börja med 𝑧(1, 𝑦) = 𝑦2 + 1
vilket betyder z då x=1, y=y:
𝑦2 + 1 = 𝑧(1, 𝑦) = −1 ∙ 𝑦 ∙ ln(1) + 𝐺(1) + 𝐻(1 ∙ 𝑦) = 𝐺(1) + 𝐻(𝑦)
Vi löser ut H ur ekvationen och passar på att byta till att uttrycka H i en generell variabel t, det blir
mindre stökigt så. (eftersom x och y varierar mellan bivillkoren medan diffekvationen skall uppfyllas
för alla x, y.)

15
𝐻(𝑦) = 𝑦2 + 1 − 𝐺(1) ↔ 𝐻(𝑡) = 𝑡2 + 1 − 𝐺(1)
Vi tar oss en titt på det andra villkoret 𝑧(𝑥, 0) = 𝑥:
𝑥 = 𝑧(𝑥, 0) = −𝑥 ∙ 0 ∙ ln(𝑥) + 𝐺(𝑥) + 𝐻(𝑥 ∙ 0) = 𝐺(𝑥) + 𝐻(0), x > 0
Och löser ut G och byter även där variabel till t
𝐺(𝑥) = 𝑥 − 𝐻(0), 𝑥 > 0 ↔ 𝐺(𝑡) = 𝑡 − 𝐻(0), 𝑡 > 0
Vi har alltså löst ut G och H så när som på 𝐻(0) och 𝐺(1):
𝐺(𝑡) = 𝑡 − 𝐻(0)
𝐻(𝑡) = 𝑡2 + 1 − 𝐺(1)
Insättning i uttrycket för z ger:
𝑧 = −xyln(𝑥) + 𝐺(𝑥) + 𝐻(𝑥𝑦) = −𝑥𝑦𝑙𝑛(𝑥) + 𝑥 − 𝐻(0) + (𝑥𝑦)2 + 1 − 𝐺(1)
Men ur 𝐺(𝑡) = 𝑡 − 𝐻(0) fås 𝐺(1) = 1 − 𝐻(0) ↔ 𝐺(1) + 𝐻(0) = 1 så:
𝑧 = −𝑥𝑦𝑙𝑛(𝑥) + 𝑥 + (𝑥𝑦)2
Kontroll:
Pröva om z uppfyller PDE (givetvis genom att derivera z för att få fram de första och andraderivator
PDE innehåller). Pröva även att z uppfyller bivillkoren, i detta exempel genom att ersätta (x, y) med
(1, y) respektive att ersätta (x, y) med (x, 0). Du bör få z=𝑦2 + 1 respektive z=x såsom bivillkoren i
detta exempel kräver. Då har du gjort rätt!
Svar: 𝒛 = −𝒙𝒚𝒍𝒏(𝒙) + 𝒙 + 𝒙𝟐𝒚𝟐

16