Türkiye çin Çoklu-GNSS PPP Performans n n …³ na dü³en ortalama görünür uydu say s ....
26
Transcript of Türkiye çin Çoklu-GNSS PPP Performans n n …³ na dü³en ortalama görünür uydu say s ....

Türkiye �çin Çoklu-GNSS PPP Performans�n�nDe§erlendirilmesi
Berkay Bahadur1, Metin Nohutcu1
1Geomatik Mühendisli§i BölümüHacettepe Üniversitesi
TUJK 2017 Y�l� Bilimsel Toplant�s�, Kas�m 2017
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 1 / 25

�ÇER�K
1 Giri³
2 Çoklu-GNSS Modeli
3 Çoklu-GNSS Yaz�l�m�: PPPH
4 Uygulama
5 Sonuç ve Öneriler
6 Kaynakça
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 2 / 25
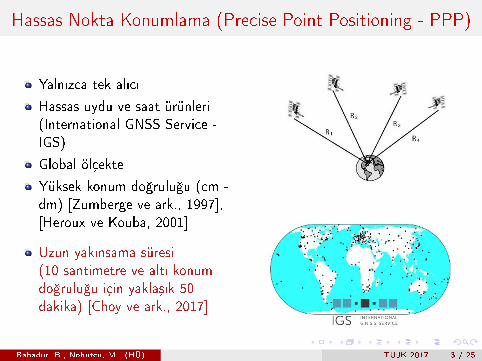
Hassas Nokta Konumlama (Precise Point Positioning - PPP)
Yaln�zca tek al�c�
Hassas uydu ve saat ürünleri(International GNSS Service -IGS)
Global ölçekte
Yüksek konum do§rulu§u (cm -dm) [Zumberge ve ark., 1997],[Heroux ve Kouba, 2001]
Uzun yak�nsama süresi(10 santimetre ve alt� konumdo§rulu§u için yakla³�k 50dakika) [Choy ve ark., 2017]
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 3 / 25
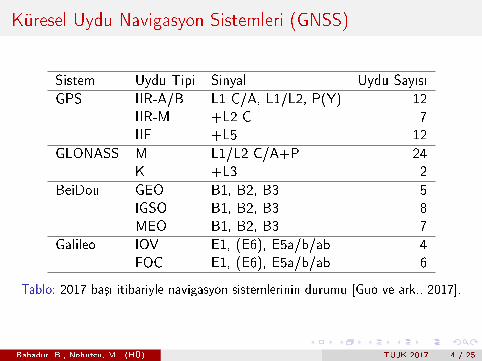
Küresel Uydu Navigasyon Sistemleri (GNSS)
Sistem Uydu Tipi Sinyal Uydu Say�s�GPS IIR-A/B L1 C/A, L1/L2, P(Y) 12
IIR-M +L2 C 7IIF +L5 12
GLONASS M L1/L2 C/A+P 24K +L3 2
BeiDou GEO B1, B2, B3 5IGSO B1, B2, B3 8MEO B1, B2, B3 7
Galileo IOV E1, (E6), E5a/b/ab 4FOC E1, (E6), E5a/b/ab 6
Tablo: 2017 ba³� itibariyle navigasyon sistemlerinin durumu [Guo ve ark., 2017].
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 4 / 25

Çoklu-GNSS Entegrasyonu
Temel farkl�l�klar
Yersel referans (WGS84,PZ-90, vb.)
Zaman sistemi (GPST,GLONASS Time, vb.)
Sinyal yap�s� (CDMA -FDMA)
ÇÖZÜM:Tüm uydular için ortak bira§dan elde edilen hassasürünleri kullanmak.IGS Multi-GNSSExperiment - IGS/MGEX
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 5 / 25

Çoklu-GNSS Entegrasyonu
Temel farkl�l�klar
Yersel referans (WGS84,PZ-90, vb.)
Zaman sistemi (GPST,GLONASS Time, vb.)
Sinyal yap�s� (CDMA -FDMA)
ÇÖZÜM:Tüm uydular için ortak bira§dan elde edilen hassasürünleri kullanmak.IGS Multi-GNSSExperiment - IGS/MGEX
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 5 / 25

IGS Multi-GNSS Experiment (MGEX)
�ekil: 2017 ba³� itibariyle IGS MGEX istasyonlar�[Montenbruck ve ark., 2017].
500'ün üzerindeIGS istasyonu
1/3'ü MGEXistasyonu
Kurulu³ K�saltma Sistem Yörünge SaatCNES/CLS GRM GPS+GLO+GAL 15 dk 30 sanCODE COM GPS+GLO+GAL+BDS+QZS 15 dk 5 dkGFZ GBM GPS+GLO+GAL+BDS+QZS 15 dk 30 sanJAXA QZF GPS+QZS 5 dk -TUM TUM GAL+QZS 5 dk -Wuhan Univ. WUM GPS+GLO+GAL+BDS+QZS 15 dk 5 dk
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 6 / 25

Çoklu-GNSS Modeli
Kod ve faz gözlemleri için iyonosfer-ba§�ms�z lineer kombinasyon e³itlikleri:
Ps,jIF ,r = ρs,jr + ˆcdt
sr − ˆcdT
s,j+ T s,j
r + ε(Ps,jIF ,r )
Ls,jIF ,r = ρs,jr + ˆcdtsr − ˆcdT
s,j+ T s,j
r + λsIF N̂s,jIF + ε(Ls,jIF ,r )
burada
ˆcdtsr = cdtsr + bsi ,r
ˆcdTs,j
= cdT sr + bs,ji
N̂s,jIF = Ns,j
i + (Bsi ,r − bsi ,r )− (Bs,j
i − bs,ji )
Belirsizlik parametresi (Ns,ji ) tam say� özelli§ini kaybeder.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 7 / 25

Çoklu-GNSS Modeli
GLONASS FDMA sinyalleri kulland�§� için
bRi ,r = bRavg ,r + δbRi ,r , BRi ,r = BR
avg ,r + δBRi ,r
δbRi ,r ve δBRi ,r
frekans-ba§�ml� k�s�mlar(IFB)
PG ,jIF ,r = ρG ,j
r + ˆcdtGr + TG ,j
r + ε(PG ,jIF ,r )
LG ,jIF ,r = ρG ,j
r + ˆcdtGr + TG ,j
r + λGIF N̂G ,jIF + ε(LG ,j
IF ,r )
PR,jIF ,r = ρR,j
r + ˆcdtRr + TR,j
r + ε(PR,jIF ,r )
LR,jIF ,r = ρR,j
r + ˆcdtRr + TR,j
r + λRIF N̂R,jIF + ε(LR,j
IF ,r )
PE ,jIF ,r = ρE ,j
r + ˆcdtEr + TE ,j
r + ε(PE ,jIF ,r )
LE ,jIF ,r = ρE ,j
r + ˆcdtEr + TE ,j
r + λEIF N̂E ,jIF + ε(LE ,j
IF ,r )
PC ,jIF ,r = ρC ,j
r + ˆcdtCr + TC ,j
r + ε(PC ,jIF ,r )
LC ,jIF ,r = ρC ,j
r + ˆcdtCr + TC ,j
r + λCIF N̂C ,jIF + ε(LC ,j
IF ,r )
Her sistem için al�c� saathatas� kestirmek yerinesistemler aras� farkparametresi tan�t�l�r[Cai ve Gao, 2013].
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 8 / 25
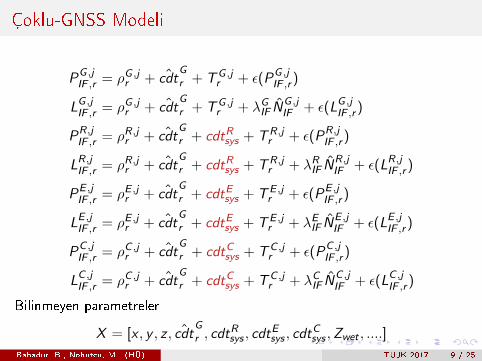
Çoklu-GNSS Modeli
PG ,jIF ,r = ρG ,j
r + ˆcdtGr + TG ,j
r + ε(PG ,jIF ,r )
LG ,jIF ,r = ρG ,j
r + ˆcdtGr + TG ,j
r + λGIF N̂G ,jIF + ε(LG ,j
IF ,r )
PR,jIF ,r = ρR,j
r + ˆcdtGr + cdtRsys + TR,j
r + ε(PR,jIF ,r )
LR,jIF ,r = ρR,j
r + ˆcdtGr + cdtRsys + TR,j
r + λRIF N̂R,jIF + ε(LR,j
IF ,r )
PE ,jIF ,r = ρE ,j
r + ˆcdtGr + cdtEsys + TE ,j
r + ε(PE ,jIF ,r )
LE ,jIF ,r = ρE ,j
r + ˆcdtGr + cdtEsys + TE ,j
r + λEIF N̂E ,jIF + ε(LE ,j
IF ,r )
PC ,jIF ,r = ρC ,j
r + ˆcdtGr + cdtCsys + TC ,j
r + ε(PC ,jIF ,r )
LC ,jIF ,r = ρC ,j
r + ˆcdtGr + cdtCsys + TC ,j
r + λCIF N̂C ,jIF + ε(LC ,j
IF ,r )
Bilinmeyen parametreler
X = [x , y , z , ˆcdtGr , cdt
Rsys , cdt
Esys , cdt
Csys ,Zwet , ....]
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 9 / 25
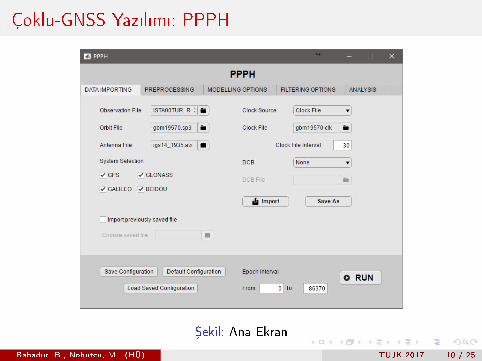
Çoklu-GNSS Yaz�l�m�: PPPH
�ekil: Ana Ekran
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 10 / 25

Çoklu-GNSS Yaz�l�m�: PPPH
�ekil: Ön �³leme
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 11 / 25

Çoklu-GNSS Yaz�l�m�: PPPH
�ekil: Modelleme Seçenekleri
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 12 / 25
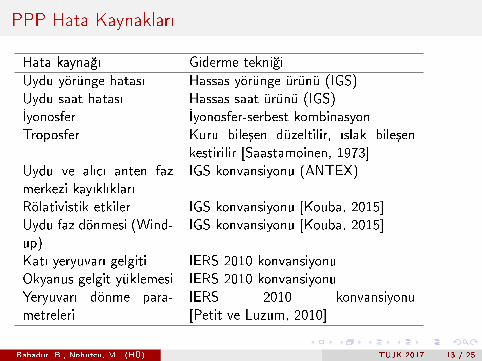
PPP Hata Kaynaklar�
Hata kayna§� Giderme tekni§iUydu yörünge hatas� Hassas yörünge ürünü (IGS)Uydu saat hatas� Hassas saat ürünü (IGS)�yonosfer �yonosfer-serbest kombinasyonTroposfer Kuru bile³en düzeltilir, �slak bile³en
kestirilir [Saastamoinen, 1973]Uydu ve al�c� anten fazmerkezi kay�kl�klar�
IGS konvansiyonu (ANTEX)
Rölativistik etkiler IGS konvansiyonu [Kouba, 2015]Uydu faz dönmesi (Wind-up)
IGS konvansiyonu [Kouba, 2015]
Kat� yeryuvar� gelgiti IERS 2010 konvansiyonuOkyanus gelgit yüklemesi IERS 2010 konvansiyonuYeryuvar� dönme para-metreleri
IERS 2010 konvansiyonu[Petit ve Luzum, 2010]
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 13 / 25

Çoklu-GNSS Yaz�l�m�: PPPH
�ekil: Filtreleme Seçenekleri
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 14 / 25

Çoklu-GNSS Yaz�l�m�: PPPH
�ekil: Analizler
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 15 / 25

Çoklu-GNSS Yaz�l�m�: PPPH
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 16 / 25
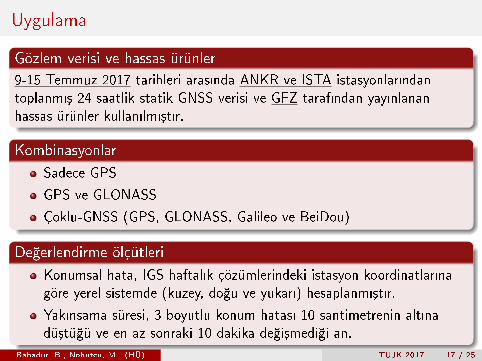
Uygulama
Gözlem verisi ve hassas ürünler
9-15 Temmuz 2017 tarihleri aras�nda ANKR ve ISTA istasyonlar�ndantoplanm�³ 24 saatlik statik GNSS verisi ve GFZ taraf�ndan yay�nlananhassas ürünler kullan�lm�³t�r.
Kombinasyonlar
Sadece GPS
GPS ve GLONASS
Çoklu-GNSS (GPS, GLONASS, Galileo ve BeiDou)
De§erlendirme ölçütleri
Konumsal hata, IGS haftal�k çözümlerindeki istasyon koordinatlar�nagöre yerel sistemde (kuzey, do§u ve yukar�) hesaplanm�³t�r.
Yak�nsama süresi, 3 boyutlu konum hatas� 10 santimetrenin alt�nadü³tü§ü ve en az sonraki 10 dakika de§i³medi§i an.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 17 / 25

Uygulama
24 saatlik gözlem verilerin de§erlendirilmesi sonucunda elde edilen epokba³�na dü³en ortalama görünür uydu say�s�.
Tablo: Sistem baz�ndagörünür uydu say�lar�.
Sistem ANKR ISTAGPS 10.6 10.3GLONASS 7.7 7.2Galileo 4.3 3.8BeiDou 5.8 2.3
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 18 / 25

Uygulama ve Sonuçlar
24 saatlik gözlem verilerin de§erlendirilmesi sonucunda elde edilen sonuçlar.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 19 / 25

Uygulama ve Sonuçlar
3 saatlik verilerin de§erlendirilmesi sonucunda elde edilen sonuçlar.
Tablo: Farkl� kombinasyonlardan elde edilen ortalama konumsal hatalar.
�stasyon Kombinasyon Konumsal Hata (mm) GPS'e Göre �yile³me (%)K D Y 3B K D Y 3B
ANKRGPS 10 14 25 33 - - - -GPS/GLONASS 8 13 22 29 20 7 12 12ÇOKLU-GNSS 7 11 21 27 30 21 16 18
ISTAGPS 11 18 28 38 - - - -GPS/GLONASS 8 13 20 29 27 28 29 23ÇOKLU-GNSS 6 10 18 24 45 44 36 37
Tablo: Farkl� kombinasyonlardan elde edilen ortalama yak�nsama süreleri.
GPS GPS/ GLO-NASS
ÇOKLU-GNSS
ANKRYak�nsama Süresi (dk) 49.08 33.06 31.67GPS'e Göre �yile³me (%) - 32 35
ISTAYak�nsama Süresi (dk) 54.15 34.78 31.40GPS'e Göre �yile³me (%) - 36 42
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 20 / 25

Sonuç ve Öneriler
Sonuçlar
Çoklu-GNSS kombinasyonlar� PPP performans�n� ciddi ³ekildeiyile³tirmektedir.
Galileo ve BeiDou sistemlerinin yak�n gelecekte tamamlanacak olmas�PPP anlam�nda önemli f�rsatlar sunmaktad�r.
Öneriler
IGS-MGEX projesi kapsam�nda sunulan ürünlerin kalitesiara³t�r�lmal�d�r.
Çoklu-GNSS kombinasyonlar�n�n atmosfer çal�³malar�ndakullan�labilirli§i ara³t�r�lmal�d�r.
PPPH yaz�l�m� kullan�c�lara aç�larak geli³tirilmesi sa§lanmal�d�r.
Tek-frekansl� PPP çal�³malar�nda performans� de§erlendirilmelidir.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 21 / 25
�LG� VE SABRINIZ �Ç�N TE�EKKÜRLER.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 22 / 25

Kaynakça
Zumberge, J., He�in, M., Je�erson, D., Watkins, M., Webb, F.,Precise point positioning for the e�cient and robust analysis of GPSdata from large networks, Journal of Geophysical Research, 102(B3),5005:5017, 1997.
Heroux, P., Kouba, J., GPS precise point positioning using IGS orbitproducts, GPS Solutions, 5:2, 12-28, 2001.
Choy, S., Bisnath, S., Rizos, C., Uncovering common misconceptions inGNSS Precise Point Positioning and its future prospect, GPSSolutions, 21, 13-22, 2017.
Guo, F., Li, X., Zhang, X., Wang, J., The contribution of Multi-GNSSExperiment (MGEX) to precise point positioning, Advances in SpaceResearch, 59, 2714-2725, 2017.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 23 / 25

Montenbruck, O., Steinberger, P., Prange, L., Deng, Z., Zhao, Q.,Perosanz, F., Romero, I., Coll, C., Sturze, A., Weber, G., Schmid, R.,MacLeod, K., Schaer, S., The Multi-GNSS Experiment (MGEX) of theInternational GNSS Service (IGS) Achievements, prospects andchallenges, Advances in Space Research, 59 ,1671-1697, 2017.
Cai, C., Gao, Y., Modeling and assessment of combinedGPS/GLONASS precise point positioning, GPS Solutions, 17,223�236, 2013.
Saastamoinen, J., Contributions to the theory of atmosphericrefraction, Bulletin Geodesique, 107, 13-34, 1973.
Kouba, J., A guide to using International GNSS Service (IGS)products, http://kb.igs.org/hc/en-us/articles/201271873-A-Guide-to-Usingthe-IGS-Products,2015.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 24 / 25

Petit, G., Luzum, B., IERS Conventions 2010� Technical Note No. 36,http://www.iers.org/TN36/, Frankfurt, 2010.
Bahadur, B., Nohutcu, M. (HÜ) TUJK 2017 25 / 25