THE NEGATIVE-FEEDBACK LOOP - College of Engineering ... · I V ICVS 0 0 i to v v o/i i r m...
29
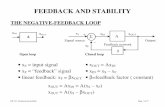
EE 323 -Feedback and stability Page 1 of 29 FEEDBACK AND STABILITY THE NEGATIVE-FEEDBACK LOOP • x S = input signal • x OUT = Ax IN • x F = “feedback” signal • x IN = x S – x F • linear feedback: x F = βx OUT • β=feedback factor ( constant) x OUT = Ax IN = A(x S – x F ) x OUT = A(x S – βx OUT ) x IN X OUT A Σ A β x S x IN x OUT x F + _ Feedback network Output Signal source Open loop Closed loop
Transcript of THE NEGATIVE-FEEDBACK LOOP - College of Engineering ... · I V ICVS 0 0 i to v v o/i i r m...

EE 323 -Feedback and stability Page 1 of 29
FEEDBACK AND STABILITY
THE NEGATIVE-FEEDBACK LOOP
• xS = input signal • xOUT = AxIN • xF = “feedback” signal • xIN = xS – xF • linear feedback: xF = βxOUT • β=feedback factor ( constant)
xOUT = AxIN = A(xS – xF) xOUT = A(xS – βxOUT)
xIN XOUT A Σ A
β
xS xIN xOUT
xF
+
_ Feedback network
Output Signal source
Open loop Closed loop

EE 323 -Feedback and stability Page 2 of 29
•••• xOUT depends upon itself – a property intrinsic to the nature of a feedback path
xOUT(1+Aββββ) =AxS or �A1A
xx
AS
OUTfb ++++
========
•••• Afb = closed-loop gain (gain with feedback) •••• Aββββ>>>>>>>>1
�
1�A
AAfb ====≈≈≈≈
•••• Closed-loop gain, Afb • is independent of A in the limit Aββββ>>>>>>>>1, • depends only on the feedback factor ββββ.
•••• This feature is important. It allows Afb to be precisely set regardless of the exact value of A.

EE 323 -Feedback and stability Page 3 of 29
• Feedback network is generally made from passive (and easy-to-control) circuit elements and factors that affect A (component variations, temperature, and circuit non-linearity) become much less important to the closed-loop circuit.
•••• Worth the price of reducing gain from AOL to ACL.
Example: Non-inverting op-amp configuration

EE 323 -Feedback and stability Page 4 of 29
GENERAL REQUIRMENTS OF FEEDBACK CIRCUITS
� Signals at summing node must be the same type (i.e., all voltages or currents).
� The output, xOUT, needs not be of the same signal type as its input. � The amplification factor, A, can have dimension units:
� Av=Volt/Volt or Ai=Ampere/Ampere � Ar=Volt/Ampere or Ag=Ampere/Volt.
� Feedback function, ββββ, must have units reciprocal to those of A, (i.e., product Aββββ is dimensionless -- ensures xF is the same signal type as xS and xIN).
� In general, feedback network is made from passive components only and ββββ never exceeds unity.
� In the feedback loop, xF is subtracted from xS, making the feedback negative.

EE 323 -Feedback and stability Page 5 of 29
� If xF is added to xS at the summation node, the feedback becomes positive (oscillator, active filters.)
� Negative feedback benefits (desirable in amp. design): � Reducing amplifier non-linearity, � Improving input and output impedance, � Extending amplifier bandwidth, � Stabilizing gain, and reducing amplifier sensitivity to transistor
parameters. .

EE 323 -Feedback and stability Page 6 of 29
FOUR TYPES OF NEGATIVE FEEDBACK
� Four basic amplifier types

EE 323 -Feedback and stability Page 7 of 29
a. A voltage amplifier with gain Av
b. A current amplifier with gain Ai
c. A transconductance amplifier or voltage-to-current converter. The amplification factor, Ag, or
gm = iOUT/vIN, (A/V or conductance).
d. A transresistance amplifier or current-to-voltage converter. The amplification factor, Ar or
rm, = vOUT/iIN (V/A or resistance).

EE 323 -Feedback and stability Page 8 of 29
� The four types of negative feedback In Out Circuit zin zout Converts Ratio Symbol Type of Amplifier
V V VCVS ∞∞∞∞ 0 - vo/vi Av Voltage amplifier I V ICVS 0 0 i to v vo/ii rm Trans-resistance amplifier V I VCIS ∞∞∞∞ ∞∞∞∞ v to i io/vi gm Trans-conductance amplifier I I ICIS 0 ∞∞∞∞ - io/ii Ai Current amplifier
vi vo Avvi HIGH
LOW
VCVS
ii
vo riii LOW
LOW
ICVS
io
gmvi HIGH HIGH
VCIS
~ ~
io
Aivi LOW HIGH
ii
ICIS
vi

EE 323 -Feedback and stability Page 9 of 29
∗∗∗∗∗∗∗∗∗∗∗∗ VOLTAGE-CONTROLLED VOLTAGE SOURCE (VCVS)
• High input impedance • Low output impedance • Stiff voltage source
•••• Feedback fraction:
•••• Closed loop gain: •••• Loop gain:
• Error between ideal and exact values:
211
out1R
RRR
vv
�++++
========
1
2
1
21
OL
OL
OL
OLCL R
R1R
RR�
1�A
A�A1
AA ++++====++++====≈≈≈≈≈≈≈≈++++
====
vin vout + _
R1
+VCC
-VEE R2
�A1%100Error%OL++++
====
�A1Gain OLCL ++++====

EE 323 -Feedback and stability Page 10 of 29
•••• Impedances:
•••• Output voltage: vin=Avout � Negative feedback: Stabilizes voltage gain, Increases input impedance,
Decreases output impedance, Reduces nonlinear distortion of the amplified signal.
a. Gain stability:
• The gain is stabilized because depends only on the external resistances (i.e., can be precision resistors).
• The gain stability depends on having a low percent error between the ideal and the exact closed-loop voltage gains.
• The smaller the percent error, the better the stability. • The worst-case error of closed-loop voltage gain occurs when the open-loop
voltage gain AOL is minimum.
�A1%100errorMaximum%(min)OL++++
====
�A1RZR)�A1(Z
OL
outoutinOLin ++++
====++++====

EE 323 -Feedback and stability Page 11 of 29
b. Nonlinear distortion:
• non-linear distortion will occur with large signals. • input/output response becomes non-linear. • Nonlinear also produces harmonics of the input signal.
• Total harmonic distortion:
%100voltagelFundamenta
voltageharmonicTotalTHD ====

EE 323 -Feedback and stability Page 12 of 29
• Negative feedback reduces harmonic distortion (closed-loop harmonic distortion):
�A1THDTHD
OL
OLCL ++++
====
• Quantity 1+AOLββββ has a curative effect. When it is large, it reduces the harmonic distortion to negligible levels, (ex.., high-fidelity sound in audio amplifier system).
Example 19-1, 19-2, 19-3, 19-4 (page 667)

EE 323 -Feedback and stability Page 13 of 29
*** CURRENT-CONTROLLED VOLTAGE SOURCE (ICVS) ***
• Low input impedance, Low output impedance. • Stiff voltage source from a current input. • Trans-resistance (rm) (i.e., output voltage is proportional to the current by a
resistance).
• R2 can be selected to have different conversion factors (trans-resistances).
•••• Input and output impedances:
Example: inverting amplifier, 19-5, 19-6 (page 674)
2inOL
OL2inout Ri
A1ARiv ====++++
====
OL
out)CL(out
OL
2)CL(in A1
RZA1
Rz++++
====++++
====
iin vout _
+
+VCC
-VEE
R2

EE 323 -Feedback and stability Page 14 of 29
∗∗∗∗∗∗∗∗∗∗∗∗ VOLTAGE-CONTROLLED CURRENT SOURCE (VCIS)
• Transconductance, gm, (i.e., 1/R) • Both input and output impedances are high • Stiff current source.
• Input and output impedances:
Example 19-7 (page 677)
1minm
1
inout
OL
211
inout
R1gwherevg
Rvi
A)RR(R
vi
============
++++++++====
1OL)CL(out
inOL)CL(in
R)A1(Z
R)�A1(Z
++++====
++++====
vin iout + _
R1
+VCC
-VEE RL=R2

EE 323 -Feedback and stability Page 15 of 29
∗∗∗∗∗∗∗∗∗∗∗∗ CURRENT-CONTROLLED CURRENT SOURCE (ICIS)
• Low input impedance, High output impedance . • Stiff current source. • Current gain factor Ai.
•••• Input and output impedances:
Example 19-8 (page 678)
iin
iout _ +
R1
+VCC
-VEE RL
R2
1RR
RAR)RR(AA
1
2
1OLL
21OLi ++++≅≅≅≅
++++++++====
21
1
OL
2)CL(in RR
R�where
�A1RZ
++++====
++++==== 1OL)CL(out R)A1(Z ++++====

EE 323 -Feedback and stability Page 16 of 29
∗∗∗∗∗∗∗∗∗∗∗∗ BANDWIDTH
• What is bandwidth? • Negative feedback increases the bandwidth of an amplifier. • Because of the roll-off in open-loop voltage gain means less voltage is fed
back, which produces more input voltage as a compensation. • Closed-loop cutoff frequency is higher than the open-loop cutoff frequency.
• The closed-loop cutoff frequency:
•••• Gain Bandwidth Product
“Gain bandwidth product is constant”
unity)CL(2CL ffA ====
• GBP = funity = constant for a given op-amp. • Trade off gain to bandwidth in design. • Less gain, more bandwidth (more gain, less bandwidth).
CL
unity)CL(2 A
ff ====
frequencyGainGBP ⋅⋅⋅⋅====
CLCLOLOL fAfA ====

EE 323 -Feedback and stability Page 17 of 29
• Unity frequency determines GBP of the op-amp. • Higher unity frequency op-amp may be needed for specific application
(requires both high gain and high bandwidth.)
Example 19-9, 19-10, 19-11, 19-12, 19-13 (page 682)

EE 323 -Feedback and stability Page 18 of 29

EE 323 -Feedback and stability Page 19 of 29
FEEDBACK LOOP STABILITY
Stability of the negative feedback loop must be examined to verify that unwanted oscillations will not occur.
• Output of a linear system experiences a relative phase shift of –90O if the driving frequency increases beyond one of the poles of the system function.
• System with three or more poles, a frequency will exist at which the phase shift exceeds 180O.

EE 323 -Feedback and stability Page 20 of 29
At some frequency, ωωωω180, the –180O phase shift will change an otherwise negative feedback loop into a positive feedback loop.
The response of the feedback loop at ωωωω180: �A)1(1
A)1(v180
180out −−−−++++
−−−−====

EE 323 -Feedback and stability Page 21 of 29
• If A180ββββ=1, the denominator becomes 0 and the output becomes infinite (even vin = 0).
• Such a condition is equivalent to an oscillation at the frequency ωωωω180. • Less stringent inequality A180ββββ≥≥≥≥1 also leads to oscillation at ωωωω180.
• Note: in practice, the saturation limits of the op-amp limit the magnitude of oscillation.

EE 323 -Feedback and stability Page 22 of 29
I. FEEDBACK LOOP COMPENSATION
� Use frequency compensation to prevent unwanted oscillations (at ωωωω180). � Alter the open loop response so that the stability condition is met: A180ββββ <<<< 1 � Internal design (stability condition is met up to some maximum value of ββββ,
i.e., ββββ=1). � The LM741 is stable under all negative feedback conditions. The value of A180
of LM741 is less than unity.

EE 323 -Feedback and stability Page 23 of 29
� Adding external components to the feedback loop: • Evaluate the feedback loop for stability • If the feedback loop is unstable, external compensation must be added. � External compensation is sometimes preferred over internal compensation
because the latter limits the GBP of the feedback loop.

EE 323 -Feedback and stability Page 24 of 29
II. EVALUATION OF STABILITY CONDITION
Gain margin and phase margin to determine stability:
�A1�)�j(A1inargMGain 180�180−−−−====−−−−====−−−−
*** Gain margin must be positive (i.e., A180ββββ <<<< 1).
)�Aarg(180)180()�Aarg(inargMPhase)PM()PM( �)�j(
00�)�j( ++++====−−−−−−−−====−−−−
1�A )�j( ==== at ωωωωPM.
*** Negative phase margin: �A )�j( is greater than unity at ωωωω180 (i.e., circuit unstable.)
• One margin passes the stability test, the other will also. • Design a feedback loop with excess gain or phase margin to ensure stability.

EE 323 -Feedback and stability Page 25 of 29
Example: Transfer function open-loop frequency response:
where A0=106, ωωωω1=10rad/sec, ωωωω2=ωωωω3=106rad/sec.
Since ωωωω1 <<<<<<<< ωωωω2, the dominant pole of A(jωωωω) ≈≈≈≈ ωωωω1 . a. How large can the feedback parameter ββββ become before instability results? Assume ββββ
is not a function of frequency. b. Design a non-inverting amplifier that meets the stability conditions.
Solution:
Since ββββ is not frequency dependent, ωωωω180 occurs at the frequency where the angle of the transfer function is at –180O, that is where:
0
3
1801
2
1801
1
1801)�j( 180)
�
�(tan)
�
�(tan)
�
�(tan)Aarg( −−−−====−−−−−−−−−−−−==== −−−−−−−−−−−−
solving for ωωωω: ωωωω180 ≅≅≅≅ 106 rad/sec
)�
�j1)(�
�j1)(�
�j1(
AA
321
0)�j(
++++++++++++====

EE 323 -Feedback and stability Page 26 of 29
The magnitude of A(jωωωω) at ωωωω180 as follows:
5)2)(10(
10
)10
10j1)(10
10j1)(10
10j1(
10A25
6
6
6
6
66
6180 ========
++++++++++++
====
Stability of the feedback loop requires:
1�A )�j( ≤≤≤≤ ���� 2.051
� ====≤≤≤≤
For the circuit to be stable, the closed-loop gain must therefore meet the minimum condition:
5�
1vv
in
out ≥≥≥≥====
vin vout + _
R1
+VCC
-VEE R2=4R1

EE 323 -Feedback and stability Page 27 of 29
EXTERNAL COMPENSATION
A compensation network is added to an under-compensated negative feedback loop.
Example:
a. Show that the minimum allowed ββββ that ensures stability is 0.001.
b. To what closed-loop gain does ββββ correspond?
c. Design a compensation network that will stabilize the op-amp in a non-inverting amplifier with a gain of 5 (i.e., 14dB).

EE 323 -Feedback and stability Page 28 of 29
Solution:
• f180 = 3.2*106 Hz (from the angle portion of the Bode plot.)
• A180=60dB=1000
• 1�A )�j( ≤≤≤≤ ���� ββββ < 10-3.
• A non-inverting amplifier gain of 5 (ββββ=0.2) will be unstable.
• Compensation network adds a pole to the op-amp open-loop response at a frequency below f180,
• The open-loop gain at f180 will be reduced so that the stability condition can be met.
• If the pole is located well below f90, it will add an additional –90O phase shift at f90, bringing the total phase shift at f90 to –180O.
• The original f90 before compensation will become the new f180 after compensation.
• 0�Aor1�A dBdB9090 ====++++====
• The uncompensated op-amp has a gain magnitude of 90dB at f90.
• If an amplifier with closed-loop gain of 5 (i.e., 14dB) is to be made, then ββββ=1/5 (i.e., - 14dB) and A90 must be reduced from 90dB to 14dB (i.e., 76dB).
• This can be achieved with a pole at fc =50.7Hz. How????????

EE 323 -Feedback and stability Page 29 of 29
o Above fc, the pole at fc will
increase the roll-off by –20dB/decade.
Hz7.501031.6
Hz102.310ff
decades8.3decade/dB20dB76ff
3
5
8.390
c
c90
====⋅⋅⋅⋅
⋅⋅⋅⋅========
====−−−−
−−−−====−−−−
o The compensation pole at fc introduced by a simple RC filter
o sec/rad319f�2CR1
cc========