Analisis de circuitos en ingenieria 7ma ed. - hayt, kemmerly, durbin - mc graw-hill (1)
Upload
sebastian-pareCategory
view
224download
2
7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 1/424
APUNTES DE CÁTEDRA
“TEORÍA DE LOS CIRCUITOS”
Fig. 5. Respuesta oscilatoria amortiguada
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982
t sene A t
β α ..0
− α τ 1=
t e A α −.0
t e A α −− .0
t
i(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 2/424
1
APLICACIONES DE LAS
TRANSFORMADAS DE,
FOURIER
Y
LAPLACE
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 3/424
2
INDICE Pág.
1).-Serie de Fourier. ....................................................................................................................................... 4
1.1).- Serie de Fourier para onda periódica. ................................................................................................. 4
1.2).-Las expresiones de Fourier escritas en forma exponencial. ............................................................... 4
2).- Integral de Fourier para ondas no periódicas. ....................................................................................... 9
3).-Criterio de convergencia. ..................................................................................................................... 12
3.1).-Transformada de Fourier de la función escalón. .............................................................................. 12
4).-Transformadas de Laplace. .................................................................................................................. 14
5).-Propiedades fundamentales de la transformación de Laplace. ............................................................ 15
5.1).-Traslación real. ................................................................................................................................. 15
5.2).-Transformada del Pulso rectangular. ................................................................................................ 16
5.3).-Transformada de la función impulso Delta de Dirac. ....................................................................... 17
5.4).-Transformada de una serie de pulsos. ............................................................................................... 18
5.5).-Transformada de una onda periódica general. .................................................................................. 19
5.6).-Transformada de una función periódica pulsada. .............................................................................. 21
5.7).-Teorema de valor inicial. ................................................................................................................... 22
5.8).-Teorema de valor final. ...................................................................................................................... 22
5.9).-Transformada de una derivada. .......................................................................................................... 23
5.10).-Transformada de un integral. ............................................................................................................ 23
6).-Análisis de circuitos por la transformada de Laplace. ........................................................................... 24
6.1).-Introducción. ……………………………........................................................................................... 24
6.2).-Determinación de la respuesta de un circuito, utilizando la transformada de Laplacecomo una herramienta matemática. ..................................................................................................... 25
6.3).-Planteo y solución de problemas en el dominio transformada de Laplace. ......................................... 28
6.3.1).-Introducción. ..................................................................................................................................... 28
6.4).-Funciones de p en redes. ....................................................................................................................... 28
6.5).-Resolución de circuitos aplicando la impedancia operacional. ............................................................ 29
6.6).-Consideración de las condiciones iniciales. ......................................................................................... 33
6.7).-Caso de Nodos. ..................................................................................................................................... 37

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 4/424
3
7).-Régimen forzado y régimen transitorio. .................................................................................................. 39
8).-Análisis de las funciones operacionales de los circuitosen base a las configuraciones de polos ceros. …………………………………….…………………. 42
8.1).-Análisis. ………………………………………………………………………………………........... 45
8.2).-Conclusiones. ……………………………………............................................................................. 48
9).-aplicaciones de Laplace al análisis de algunos circuitos especiales. ...................................................... 55
9.1).-Caso 1. ................................................................................................................................................... 55
9.2).-Caso 2. ................................................................................................................................................... 61
9.3).-Caso 3. ................................................................................................................................................... 66
9.4).-Caso 4. .................................................................................................................................................... 71

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 5/424
4
1).-SERIE DE FOURIER
1.1).- Serie de Fourier para onda periódica
Dada una función ( )t f cualquiera cuya y expresión matemática no se conoce, pero que sabemos
se repite a intervalos regulares de t entre2
T − y2
T .
Esta función se la puede recomponer como la suma de una componente fundamental y varias
componentes armónicas, siendo el periodo de la fundamental, el comprendido entre –2
T y2
T .
Esta función se la puede expresar a través de la serie de Fourier que dice:
( ) ( )∑∞
=
+=
0
11cos
n
nn t ωn senbt ωnat f [1]
Donde ∫−
=2/
2/
0 )(1
T
T
dt t f T
a [2] 0a es una constante y expresa el valor medio de ( )t f .
∫−
=2/
2/
1cos)(2
T
T
n dt t ωnt f T
a [3]
∫−
=2/
2/1
)(2
T
T n
dt t ωn sent f T
b [4]
SiendoT
π f π ω
221 == , la frecuencia fundamental y la frecuencia ω de cualquier armónica es
1ωn
1.2).-Las expresiones de Fourier escritas en forma exponencial
En la expresión [1] llamamos
t ωn senbt ωna Z nnn 1cos 1 += [5]
-T/2 T/2
f(t)
t
Figura 1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 6/424
5
Luego la expresión [1] quedará:
∑∞
=
=0
)(n
n Z t f [6]
Reemplazando el seno y coseno por la formula de Euler
2cos
11
1
t ω jnt ω jnee
t ωn−+
= y j
eet ωn sen
t ω jnt ω jn
2
11
1
−−=
nos queda:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +=
−−
j
eeb
eea Z
t ω jnt ω jn
n
t ω jnt ω jn
nn 22
1111
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +=
−−
22
1111 t ω jnt ω jn
n
t ω jnt ω jn
nnee
jbee
a Z
( ) ( )nn
t ω jn
nn
t ω jn
n jbae
jbae
Z ++−=−
22
11
( ) ( ) t ω jnnn
t ω jn
nnn e jbae
jba Z 11
22
1 −++−= [7]
Reemplazando ba nn y por su valor dados por [3] y [4] y haciendo
dt t ωn sent f T
jdt t ωnt f
T jba
T
T
T
T
nn 1
2/
2/
2/
2/
1 )(2
cos)(2
∫ ∫− −
+=+
[ ]dt t ωn jsent ωnt f T
jba
T
T
nn ∫−
+=+∴2/
2/
11cos)(2
Por Euler nos queda:
dt et f T
jba
T
T
t ω jnnn ∫
−
±=±2/
2/
1)(2
Reemplazando esta última expresión en la [7] nos queda:
⎥⎥⎦
⎤
⎢⎢⎣
⎡×+×= ∫ ∫
− −
−−
2/
2/
2/
2/
1111 )(2)(221
T
T
T
T
t ω jnt ω jnt ω jnt ω jnn edt et f
T edt et f
T Z

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 7/424
6
Luego por la [6] es: ∑∞
=
=0
)(n
n Z t f
pero si extendemos la sumatoria desde n = -∞ ya con el primer término abarcamos los dos
sumandos.
∑ ∫∞+
−∞= −
− ×=∴n
T
T
t ω jnt ω jnedt et f
T t f
2/
2/
11)(1
)(
Definimos la función:
( )
∫−
−=2/
2/
1)(T
T
t ω jndt et f ω F [8]
Que es la transformada de Fourier para ondas periódicas.
Luego la antitransformada está dada por la expresión:
( ) ( )∑
+∞
−∞==n
t ω jn
eω F T t F 1
1
[9]
Ejemplo: Dada la onda cuadrada periódica de la figura 2
Determinar:
a) el espectro de frecuencia F(ω).
b) la función f(t).
f(t)
A
t Figura 2-T/2 T/2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 8/424
7
a) ( ) ( ) ( ) ( )∫∫∫ −
−
−−
−
+==2/
0
0
2/
2/
2/
.0 111
T t ω jn
T
t ω jnt ω jnT
T
dt e Adt edt et f ω F
( ) ( )12/
11
2
1
2/
01
111
−=−=⎥⎥⎦
⎤
⎢⎢⎣
⎡
−= −−−
T ω jnT ω jnT t ω jn
eωn
jA
ωn
jAe
ωn
jA
ω jn
e Aω F
Haciendo:
π nT
T
π n
T ωn
T
π nωn ==∴=
2
2
2
211
Nos queda finalmente la expresión de la transformante de Fourier.
( ) ( )12
−= − π jnenπ
AT jω F [10]
Desarrollando ( ) F para los distintos valores de n obtenemos los valores del espectro de
frecuencia.
Para n = 0 como a primera vista es indeterminado, podemos salvar la indeterminación
desarrollando la exponencial ( 1−− π jne en forma de serie o aplicando L´Hospital.
Aplicando L´Hospital
( ) ( )( )
( )222
.
0lim 00
AT ω F
AT
π
eπ j jAT
n
Limω F
n
π jn
n=∴=
−
→= =
−
→
Otra forma de cálculo para n = 0
( ) ] ( )2
2/
0
2/
0
0 AT ω F t Adt e Aω F
T T
=∴×=×= ∫
Para los otros valores de 0≠n hacemos la siguiente consideración en la expresión [10].
par para 0impar n para21cos1 nπ jn π n jsenπ ne −
− =−−=−

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 9/424
8
Haciendo una tabla para los n impares y representados gráficamente.
Figura 3. Espectro de frecuencias
Se observa que el espectro de frecuencia es discontinuo y tiene valores en ciertos puntos directos
0, ω1, 3ω1,.. etc. b) La función ( )t f en el tiempo, puede encontrarse hallando la antitransformada de ( )ω F
Aplicando la expresión [9].
( ) ( )∑∞
−∞=
=n
t ω jneω F
T t f 1
1
( )
LL ++++
+−
−=⎢⎢
⎢
⎣
⎡
+
=
−
=
=∴
−=
−
=−=
−
=
−
π
ATe j
π
ATe j
π
ATe j
π
ATe j
π n
ATe j
π n
e AT j
n
AT
T t f
n
t ω j
n
t ω j
n
t ω j
n
t ω jt ω jt ω j
553
311
20
1
5
5
5
5
3
3
3
3
111
111
Simplificando todos los términos T y multiplicando por 22 (menos el primer término), nos
queda:
( ) L+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −+=
−−−
j
ee
π
A
j
ee
π
A
j
ee
π
A At f
t ω jt ω jt ω jt ω jt ω jt ω j
25
2
23
2
2
2
2
111111 5533
Finalmente.
( ) L++++= t ω senπ
At ω sen
π
At ω sen
π
A At f 111 5
5
23
3
22
2
La onda rectangular original consiste por tanto, en un término constante o de c.d., una
fundamental, una tercera armónica y todas las demás armónicas impares.
Μ
( )ω F
0
2
AT
1± π
AT j±
3±
π
AT j
3±
5±
π
AT j
5±
-5ω1 -3ω1 -ω1 ω1 3ω 5ω1
AT/2
AT/πAT/3π
AT/5π ω
IF(ω)I

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 10/424
9
La magnitud o amplitud de las componentes armónicas están dadas por los coeficientes de los
senos.
2).- Integral de Fourier para ondas no periódicas
Hasta aquí hemos visto únicamente formas de ondas periódicas.Vemos que las ondas no senoidales periódicas, dan lugar a un espectro de frecuencia real y
discreto.
Es decir el periodo de la forma de onda, proporciona el conocimiento de la frecuencia
fundamental y las armónicas ocupan posiciones discretas que son n veces la fundamental.
Veremos ahora si podemos generalizar para el caso de formas de ondas no periódicas.
Supongamos un espectro como el de la figura 4.
Figura 4
Como el espaciamiento entre armónicas adyacentes es igual a 1 , resulta que ω ω Δ=1 .
Luego si 1ω fuera muy pequeña, también lo seria ωΔ y por tanto cualquier frecuencia puede
expresarse como ωnω Δ= .
Como 1 es inversamente proporcional a T, este tenderá a infinito cuando 1ω tienda a cero
( 01 →∞→ ω siT .
En consecuencia, puede decirse que “una forma de onda no periódica, tiene un periodo infinito”.
0 sea:
ω
π
ω
π
f T
Δ===
221
1 [11]
Luego:
ωπ T Δ=2 [12]
ω1 2 ω1 3ω10
∆ω
……..
ω = n∆ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 11/424
10
Por la [12] reemplazamos los límites de integración en la expresión de la transformada de
Fourier dada por la [8].
( ) ( ) dt et f ω F T
T
t ω jn∫=
−
−2/
2/
1
Nos queda
( ) ( ) dt et f ω F ω Aπ
ω Aπ
t ω j∫=
−
−/
/
Haciendoπ
ω
T 2
1 Δ= y reemplazando en la expresión [9] de ( )t f :
( ) ( ) ( ) ( ) ωedt et f π
t f ωeω F π
t f t ω j
n
ωπ
ωπ
t ω jt ω j
n
Δ×∑ ⎥⎦
⎤⎢⎣
⎡∫=→Δ×∑=
∞
−∞=
Δ
Δ−
∞
−∞=
/
/2
1
2
1
Sabemos que si 0→Δω entonces ∞→T
( ) ( ) ωd edt et f π
t f ω
Lim t ω jt ω j∫ ⎥
⎦
⎤⎢⎣
⎡∫=
→Δ∴
∞
∞−
−∞
∞−2
1
0
La expresión entre corchetes se llama integral de Fourier directa y se define
( ) ( ) dt et f ω F t ω j−∞
∞−∫= [13]
La expresión [13] se la conoce también como la transformada de Fourier para ondas no
periódicas.
Escribiendo nuevamente la expresión de ( )t f nos queda:
( ) ( ) ωd eω F
π
t f t ω j−
∞
∞−
∫=
2
1 [14]
La expresión [14] se llama integral de Fourier inversa o también antitransformada de Fourier
para ondas no periódicas.
Vemos que la integral directa de Fourier ([13]) es similar a la transformada de Fourier [8] sino
que ha cambiado los límites.
Esto se debe a que una forma de onda no periódica, se convierte en periódica de período infinito,
de ahí la generalización.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 12/424
11
Ejemplo 2:
Determinar el espectro de frecuencia del pulso rectangular simple de la figura 5, de T segundos
de duración y amplitud A.
Aplicando la integral de Fourier [13] en 3 partes
( ) ( ) ( ) dt edt e Adt eω F t ω j
T
t ω jT
T
t ω jT
−∞
−
−
−−
∞− ∫+
∫+
∫=
2/
2/
2/
2/00
( ) 2/2/2/
2/
T ω jT ω jT
T
t ω j eω j
Ae
ω j
Ae
ω j
Aω F +
−=⎥
⎦
⎤⎢⎣
⎡ −=∴ −
−
−
( ) j
ee
ω
Aω F
T ω jT ω j
2
2 2/2/ −− −=
( )2
2 T ω sen
ω
Aω F =∴
Representando la expresión de ( ) F nada más que para 0⟩
ººººº
Figura 6
Notamos que en el caso de ondas periódicas, había sólo ciertas frecuencias y amplitudes
relacionadas armónicamente en puntos discretos del espectro.
Si se hubiera sintonizado, con un receptor, en frecuencias distintas de las armónicas, la recepción
habría sido nula.
Sin embargo en el caso de un pulso no periódico aislado, observamos que se verifica lo contrario.
f(t)
A
t-T/2 T/2
Figura 5
AT
IF(ω)I
ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 13/424
12
Todas las frecuencias están presentes, excepto en puntos discretos (espectro continuo) y a menos
que nuestro receptor sintonizara accidentalmente en los puntos nulos, habrá señal de salida el
ocurrir el pulso.
3).-Criterio de convergencia
Una de las condiciones que debe satisfacer normalmente una función aperiódica para tener
transformada de Fourier es que exista la siguiente integral.
( )∫ ∞⟨∞
0dt t f [15] (Límites entre 0 y ∞, para el caso que nos interese funciones
que son nulas para t < 0)
3.1).-Transformada de Fourier de la función escalón
Sea la función escalón unitario ( )t μ definida como:
( )0
0
para
para
1
0
≥<
⎩⎨⎧=
t
t t μ
Probemos si cumple con la condición de convergencia
( ) ( ) ( ) [ ] ∞=∫ =+∫∫ =∞
∞+
∞−
∞
∞− 00
010 t dt dt dt t μ
Como veremos no cumple con el criterio de convergencia.
Al no cumplir con la condición de convergencia no podríamos hallar la transformada de Fourier
de esta función.
Aplicaremos un artificio para poder hallar.
Multiplicando a( )t μ por un factor de decaimiento ct e− obtendremos esta curva.
t
µ(t)
1
Figura 7

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 14/424
13
( ) ( ) ct et μt f −= [16]
( ) ( ) dt eet μω F t ω jct −−∞
∞−×∫=∴ .
( ) ( ) ( ) ( ) dt edt eedt eω F t ω jct ω jct t ω j∫=×∫+∫= ∞ +−−−∞−
∞− 00
0 10
( ) ( )[ ] ( )ω jcω jc
eω jc
ω F t ω jc
+=−⎟⎟
⎠
⎞⎜⎜⎝
⎛
+−=⎟⎟
⎠
⎞⎜⎜⎝
⎛
+−=∴
∞+ 110
110
( )ω jc
ω F +
=∴1
[17]
y ( ) ( )ω
ω F
ωc
ω F c
11022
=⇒+
= →
Ahora vemos en [16] que si 0→c entonces ( ) ( )t μt f → y haciendo tender 0→c en la
expresión [17] de ( )ω F , hallamos la transformada de ( )t μ .-
3.2).-Generalizando
Si una función ( )t f no cumple con el criterio de convergencia, se puede hallar la transformada
de Fourier multiplicando a esta función por el factor ct e− .
Lógicamente que para cada función habrá una aδC = que haga convergente la función.
Luego la transformada de Fourier será válida para todo aδC > .
Por otra parte, suponiendo que nos interesan funciones que son nulas para t < 0, entonces
definimos los limites de la integral entre 0 y∞ (integral unilateral).
Luego la nueva expresión de la transformada de Fourier será:
( ) ( ) ( )dt et f ω jc F
t ω jc+−∞∫=+0
para todo aC δ > [18]
Esta nueva expresión se llama la transformada de Fourier unilateral directa.
Luego la antitransformada será:
( ) ( ) ( )∫ +=∞
−∞=
+
ω
t ω jc dt eω jc F
π
t f
2
1 [19]
t
( ) ( ) ct et t f
−= μ 1
Figura 8

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 15/424
14
Cambiando la variable de integración
( ) ( ) ω jd ω jcd ω jcaωde =+∴+
Luego la antitransformada nos queda:
( ) ( ) ( ) ( )ω jcd eω jc F jπ
t f t ω jcω jc
ω jc
+∫ += ++
−21 [20]
con la condición de aδc > y 0>t
4).-TRANSFORMADAS DE LAPLACE
Hasta ahora hemos considerado a c como una constante.
Hay que reconocer sin embargo, que fue necesario utilizar diferentes valores de c para hacer
convergente la función total y por tanto c es en realidad una variable paramétrica.
Compárese este concepto con el capacitor variable de un sintonizador.
Cuando se desea cambiar la emisión recibida, la capacidad se convierte en variable al sintonizar
una nueva estación y después vuelve a ser constante.
A tal magnitud se llama variable paramétrica.
Luego c es una variable real, puede definirse una variable compleja p como sigue:
jc p +=
A esta variable compleja p la asimilamos a una frecuencia compleja, con una parte real y una
parte imaginaria.
Luego la transformada de Fourier se convierte en:
( ) ( )∫=∞
−
0
dt et f p F pt [21]
Que no es otra que la transformada de Laplace
Haciendo este mismo reemplazo en la antitransformada de Fourier nos queda.
( ) ( )∫=+
−
ω jc
ω jc
pt dt e p F jπ
t f 2
1
Se demuestra que los límites de la integral es equivalentes a integrar sobre cualquier trayectoria
cerrada que incluya todos los polos.
En consecuencia la definición de la antitransformada de Laplace es:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 16/424
15
( ) ( )∫= dpe p F jπ
t f pt
2
1 [22]
5).-Propiedades fundamentales de la transformación de Laplace
5.1).-Traslación real
En una traslación real, una curva que representa una función del tiempo se desplaza a una nueva
posición a lo largo del eje del tiempo, sin que cambie en modo alguno la forma de onda o las
características de la función.
Por ejemplo en la Fig. 9 la función ( )t f que normalmente empieza en 0=t , se ha desplazado
intacta una distancia a hacia la derecha por lo que se convierte en ( )at f − .
Luego si:
( ) ( )∫=∞
−
0dt et f p F pt
y cambiamos los limites
( ) ( ) ( ) ( )∫ ×−=∫ −=∞
−∞
−−
a
pt ap
a
at p dt eeat f dt eat f t F
como ( ) 0=− at f entre 0 y a nos queda:
( ) ( ) ( ) ( )∫ −=⇒∫ ×−=∞
−∞
−−
a
pt ap
a
pt ap dt eat f e p F dt eeat f p F
( ) ( ) p F eat f ap−=−∴ L [23]
Siendo a real y positivo y ( ) p F , la transformada de la función sin trasladar.
f t f t –
t
aFigura 9

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 17/424
16
Conclusión: La traslación en el dominio del tiempo, equivale a la multiplicación por una
exponencial en el dominio de P
Ejemplo3: Transformada de una función escalón desplazada.
Sea la función ( ) ( )t μt f =
y se traslada un valor a
Aplicando la definición de translación dad por la [23]
( ) ( ) ( ) ( ) dt edt edt eat μat μ pt
a
pt a
pt −∞
−−∞
∫+∫=∫ −=− 1.000
L
( ) ] ap
a
e
pe
P
at μ pt −∞ =−=− − 11L
( ) p
eat μ ap 1−=−∴ L
Lo que verifica la expresión [53] de traslación
5.2).-Transformada del Pulso rectangular.
Sea el pulso rectangular de la Fig. 10 de amplitud unitaria y de a segundos de duración.
Para hallar su transformada, debemos hallar la expresión matemática de esta función
Para ello lo haremos como una resta de funciones escalón unitario o sea.
1
μ(t)
t
μ(t - a)
t
a
1
a
t
Figura 10

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 18/424
17
( ) ( ) ( )at μt μt f −−=
( ) ( ) ( ) at μt μt f −−=∴ LLL
Recordando que:
( ) p
t μ1
=L y que ( ) p
eat μ ap 1−=−L
Luego:
( ) ape p p
t f −−=11
L p
e p F
ap−−=∴
1)( [24]
5.3).-Transformada de la función impulso Delta de Dirac.
La función delta ( )t δ tiene muchas aplicaciones.
Se define de la siguiente manera:
Figura 11
( )⎪⎩
⎪⎨⎧
=∞
≠=
0
00
t si
t sit δ y que ( ) 1=∫
∞
∞−dt t δ o sea, el área de la función debe ser uno
Aunque en la práctica no es obtenible, podemos aproximarnos a ellas definiendo la función pulso,
que si los es y está representada en la Fig. 12.
∞
δ t
t
U(t)
1/a
a t
Figura 12

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 19/424
18
Esta función encierra un área unitaria y se acerca a la ( )t δ con 0→a .
Luego a la función pulso vista en párrafo anterior para que tienda al pulso de Dirac, la amplitud
debe sera
1 y luego hacer tender a hacia cero.
( ) [ ] ( ) ( )[ ]⎭⎬⎫
⎩⎨⎧ −−==
→→at μt μ
a Limt U Limt δaa
1)(
00
( ) ( ) ( )[ ]⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧ −
=⎭⎬⎫
⎩⎨⎧
−−=∴−
→→ ap
e Limat μt μ
a Limt δ
ap
aa
11
00LL
Aplicando L´Hospital
( ) 1
.
0 ==
−
→ p
e p
Limt δ
ap
aL
⇒
( ) 1=t δL
“La transformada de Laplace de la función impulso es la unidad”.-
5.4).-Transformada de una serie de pulsos
Considérese la serie periódica de pulsos ilustrados en la Fig. 13, en la que el periodo es T, la
anchura del pulso es a y de altura unitaria.
La serie de pulsos ( )t f , puede expresarse como una suma de funciones escalón desplazadas.
( ) ( ) ( )[ ] [ ]
[ ] K++−−−+
++−−−+−−=
)2()2(
)()(
aT t μT t μ
aT t μT t μat μt μt f
Aplicando el concepto de traslación real y transformando
( ) K+−+−+−=−−−−−−−
p
ee
p
e
p
ee
p
e
p
e
p p F
paT pT p pa pT pT pa ..1 22
t
1
a t 2
T
Figura 13

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 20/424
19
( ) [ ] [ ]KK +++++++−= −−−−−
T p pT T p pT pa
ee p
ee p
e p F 22 1
11
( )
( ) ( )( )KK +++−=+++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ −= −−−−−
−T p pT paT p pT
pa
eee p
ee p
e
p p F 22 11
11
1
El tercer factor de la última expresión, representa el desarrollo de una serie infinita de la forma:
K++++=−
3211
1 x x x
x
Luego el tercer factor es igual a: pT e−−1
1
( )( ) PT
pa
e p
e p F
−
−
−
−=∴
1
)1(
5.5).-Transformada de una onda periódica general
Sea una onda de forma general y de periodo T.
Podemos expresar con perfecta generalidad que:
( ) ( )T t f t f +=
y que la transformada es:
( ) ( )∫=∞
−
0. dt et f p F pt
Si se desea, puede efectuarse la integración periodo a periodo, es decir de 0 a 2T de 2T a 3T etc.
Esto puede realizarse utilizando el teorema de traslación para desplazar la función un periodo
cada vez.
Así:
( ) ( ) ( ) ( ) dt enT t f dt eT t f dt et f dt et f T n
nT
nT t pT t pT
T
pt T
pt ∫ +++∫ ++∫=∫
++−+−−−
∞ )1()(
2
00)(K
No obstante, como ( )t f es periódica, se repite para cada término.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 21/424
20
( ) ( )( )
dt eet f dt et f pnT pt
n
T n
nT
pt −−∞
=
+−
∞∑ ∫=∫∴ ..
0
1
0
El término exponencial pnT e− no es una función de t y puede expresarse fuera de la integral, de
manera que:
∫∑=+
−∞
=
− T n
nT
pt
n
pnT dt et f et f L)1(
0.).(.)(
La integral se evalúa para un periodo y como ( )t f es la misma en cualquiera de ellos, podemos
elegir el comprendido desde 0 hasta T.
Por consiguiente.
( ) ( ) dt et f e p F T
pt
n
pnT ∫⎟⎟
⎠
⎞⎜⎜⎝
⎛ ∑= −∞
=
−
00.
Finalmente la serie entre paréntesis tiene su equivalente
pT n
pnT
ee
−
∞
=
−
−=∑
1
1
0
de modo que la transformada de Laplace de una onda periódica de período T es:
( ) ( ) dt et f e
p F T
pt
pT ∫−
= −−
0.
1
1 [25]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 22/424
21
Ejemplo 4: En el problema anterior de la serie de pulsos de la Fig. 13 y dado que la serie de
ondas es periódica, ya no es necesario integrar hasta el infinito sino solo de 0 a T.Pero como la función es nula desde a hasta T, solamente es necesario integrar hasta a:
( ) ( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−⎟⎟
⎠
⎞⎜⎜⎝
⎛
−=
=⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛
−=∫
−=
−−
−−
−−
pe
pe
e pe
dt ee
p F
pa
pT
a pt
pT
a pt
pT
11
1
1
1
1
11.
1
1
00
( )( ) pT
pa
e p
e p F
−
−
−
−=∴
1
1
5.6).-Transformada de una función periódica pulsada
Sea un tren de ondas senoidales manipuladas, como el de al Fig. 14.
Esta puede ser la onda de salida de un transmisor radio telegráfico, que consiste en una onda
portadora de radiofrecuencia, en este caso una senoide que tiene su propia frecuencia particular y
que se interrumpe o manipula, con pulsos rectangulares de frecuencia mucho menor, formando la
sucesión de puntos y rayas del código telegráfico, resultando una onda cuya expresión es:
( ) ( ) ( ) ( )[ ]at μt μt f t g −−= .
La transformada de Laplace que nos interesa es la de la función compuesta ( )t g .
a
T
g(t)f t
t
Figura 14
1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 23/424
22
Nótese que esta expresión es valida para el primer periodo (de 0 a T) pero como vemos que es
periódica y como vimos anteriormente, para estas funciones es necesario sólo integrar la
transformada de Laplace sobre un periodo.
Por tanto:
( ) ( ) ( )∫−
∫ == −−
∞−
T pt
pT
pt dt et g e
dt et g pG00
..1
1
Si ahora reemplazamos en la integral a ( )t g por su valor y como entre a y T la función ( )t g es
nula, tomamos los limites entre 0 y a que en este intervalo es ( ) ( )t f t g =
( ) ( )∫−
=∴ −−
a pt
pT dt et f
e pG
0.
1
1 [26]
Si la función original ( )t f no hubiera sido pulsada, podríamos haber escrito su transformada,empleando el teorema de periodicidad o sea:
( ) ( )∫−
= −−
a pt
pa dt et f
e p F
0.
1
1 [27]
Esto es suponiendo que en a entra un número entero de ciclos.
Despejando de [27] la integral, nos queda:
( ) ( ) ( )∫ −= −−a
pa pt p F edt et f 0
1
y reemplazando en [26]
( ) ( ) ( ) p F ee
pG pa
pT .1.
1
1 −−
−−
=
Si ( ) ( ) 22 pω
ω
p F est ω sent f +=⇒=
22.
1
1)(
pω
ω
e
e pG
pT
pa
+−
−=∴
−
−
_______________________
5.7).-Teorema de valor inicial
Para aplicar el teorema de valor inicial a una función ( )t f , esta debe cumplir con doscondiciones:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 24/424
23
a) que tanto ( )t f como su derivada sean transformables por Laplace.
b) que el limite de la derivada de ( ) p F , exista cuando p tiende a infinito.
Si estas condiciones se cumplen, entonces lo podemos escribir al Teorema así:
)(.)(0
p F p Limt f Lim pt ∞→→
= [28]
5.8).-Teorema de valor final
Aquí también la aplicación del teorema del valor final a una función ( )t f debe cumplir con dos
condiciones:
a) Que tanto ( )t f como su primera derivada, deben ser transformable.
b) Tiene que haber realmente valor final.
)(.)(0
p F p Limt f Lim pt →∞→
= [29]
ya veremos mas adelante dos ejemplos de aplicación de estos teoremas.-
5.9).-Transformada de una derivada
Debemos recordar la expresión de la transformada de Laplace de la derivada de una función:
( ) ( ) ( )0. f p F pdt
t df −=
⎭⎬⎫
⎩⎨⎧L [30]
Siendo
( ) = p F transformada de la función ( )t f
( ) =0 f es el valor de la función ( )t f en 0=t . Este término se utiliza cuando existen
condiciones iniciales no nulas, o sea cuando para 0=t es ( ) 00 ≠ f .-
5.10).-Transformada de un integral
Recordamos la expresión:
( ) ( ) ( )[ ]
p
dt t f
p
p F dt t f t 0=∫
+=∫L [31]
Siendo:
( ) = p F la transformada de la función ( )t f .
( )[ ] 0=∫ t dt t f = Integral de la función ( )t f , en 0=t . Este término aparece cuando existen

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 25/424
24
condiciones iniciales en 0=t , no nulas y por tanto esta integral es distintade cero.-
6).-Análisis de circuitos por la transformada de Laplace
6.1).-Introducción
Una de las características más ventajosas de la transformada de Laplace, es su capacidad de
proporcionar un conocimiento más general y detallado de la naturaleza básica de los problemas
de análisis de circuitos.
Sirve también, en la forma más práctica, para resolver problemas en los que intervienen
fenómenos transistorios o bien circuitos excitados con ondas no senoidales.
De acuerdo a los estudios realizados hasta el momento se tenía bien fijado que el concepto de
reactancia, expresada como L f π 2 oC f π 2
1 es todo lo que se necesita saber sobre impedancia.
Este concepto de reactancia fue de utilidad para el análisis de circuitos, cuando se trabajaba con
excitaciones senoidales o de corriente continua.
En la actualidad sin embargo, especialmente en electrónica, las ondas rectangulares, triangulares,
diente de sierra y muchas otras son tan comunes como las ondas senoidales y como ya veremos
en este capitulo, es aquí, donde el concepto clásico de reactancia carece completamente desentido.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 26/424
25
6.2).-Determinación de la respuesta temporal de un circuito, utilizando la transformada deLaplace como una herramienta matemática.
En la Fig. 15 se representa un diagrama de flujo que nos explica claramente cuales son los pasos
a seguir para obtener la respuesta de un circuito a una función excitación cualquiera.
Ejemplo 5:
Como una aplicación de los anteriores, se considerará el circuito de la Fig. 16.En este circuito el interruptor s se cierra en el instante 0=t .
En ese instante el capacitor se encuentra totalmente descargado (condiciones iniciales nulas).
Se requiere encontrar la corrientes resultante ( )t i , cuando se le aplica una función excitación
escalón E (corriente continua), utilizando la metodología indicada en el diagrama de la
Fig. 15. Donde )()( t E t e =
DOMINIO DEL TIEMPO DOMINIO DE LA FRECUENCIA COMPLEJA
LEYESCIRCUITALES
EXCITACIÓN
MODELO CIRCUITAL IDEALIZADO
ECUACIÓN DE EQUILIBRIO INSTANTANEO
(INTEGRO DIFERENCIAL)
RESPUESTA TEMPORAL
ECUACIÓN DE EQUILIBRIO
TRANSFORMADA
(ALGEBRAICA)
TransformaciónDirecta
RESPUESTA TRANSFORMADA
TransformaciónInversa
Figura 15
Ce(t)i(t)
e(t)
t
E
Figura 16
=
+

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 27/424
26
Aplicando la 2da regla de Kirchhoff, escribimos la ecuación de equilibrio integro diferencial.
( ) dt t iC
t i Rt e ∫+= )(1
)(
Aplicando la transformación de Laplace a esta ultima ecuación, pasamos del dominio del tiempo
al dominio de frecuencia compleja p
)(1
)(..)( ∫+= dt t i LC
t i L Rt e L
Luego transformando:
p E t μ L E t e Lt μ E t e
1.)()()(.)( ==⇒=
)(.)(. p I Rt i L R =
pC
dt t i
pC
p I dt t i L
C
t ∫+∫ = =0))(()()(.
1
Pero ( )( ) 0=∫ t dt t i representa la carga inicial del capacitor.
y( )( )
C
dt t i t 0=∫ representa el voltaje inicial sobre el capacitor
En nuestro ejemplo ambos términos son nulos. Luego:
( ) ( )
pC
p I dt t iC =∫L
1
Ahora estamos en condiciones de escribir la ecuación de equilibrio transformada.
( ) ( )
( ) ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=+=
pC R p I
pC
p I p I R
p
E 1..
Nosotros debemos hallar la corriente.
( ) ( ) p I
RC p R
E
pc R p
E p I =+
=+
=∴ 11.11.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 28/424
27
)1(
1.)(
RC p R
E p I
+=∴
Ahora para hallar la respuesta temporal ( )t i debemos hallar la antitransformada de la últimaexpresión.
Esta es una función de p cuya antitransformada es directa puesto que se encuentra tabulada en
tablas.
( ) RC t
e R
E t i
−=∴ .
E/R
i t
t
Figura 17

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 29/424
28
6.3).-Planteo y solución de problemas en el dominio transformada de Laplace
6.3.1).-Introducción: El diagrama de flujo de la Fig. 15 puede se modificado como se indica
en la Fig. 18.
En estas condiciones, la transformación de Laplace deja de ser solamente una herramienta
matemática, para convertirse en una parte integrante de la Teoría de Circuitos, permitiendo una
mayor riqueza conceptual y una mejor eficiencia operativa.
La Fig. 18 muestra que es necesario aplicar la transformación directa de Laplace a las leyescircuitales, las excitaciones y los circuitos. Por eso empezamos por aplicar la transformada a las
leyes circuitales y hallaremos lo que se llaman:
6.4).-Funciones de p en redes
Antes de continuar debemos aclarar que por ahora todo el tratamiento se hará con condiciones
nulas, es decir que en el instante del análisis, los elementos reactivos se encuentran
desenergizados.
En una red compuesta por elementos R, L y C, las relaciones de tensiones y corrientes son las
siguientes:
DOMINIO DEL TIEMPO DOMINIO DE LA FRECUENCIA COMPLEJA
LEYES CIRCUITALES
EXCITACIÓN
MODELO CIRCUITAL IDEALIZADO
RESPUESTA TEMPORAL
ECUACIÓN DE EQUILIBRIO
TRANSFORMADA - (ALGEBRAICA)
RESPUESTA TRANSFORMADA
TransformaciónInversa
Figura 18
Transformación DirectaLEYES CIRCUITALESTRANSFORMADAS
Transformación Directa EXCITACIÓNTRANSFORMADA
MODELO CIRCUITAL IDEALIZADOTRANSFORMADO
Transformación Directa

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 30/424
29
Para un resistor R es:
( ) ( ) ( ) ( ) p I R p E t i Rt e .ndotransforma =⇒⇒×=
( ) R p Z =∴
Para un inductor L es:
)(..)()(
)( p I L p p E ndotransformadt
t di Lt e =⇒⇒= L p p Z .)( =∴
Para un capacitor C es:
( ) ( ) ( ) ( )
∴=⇒⇒∫= pC
p I p E dt t i
C t e ndotransforma
1
( ) pC
p Z 1
=
Vemos que aplicando la transformación de Laplace a las leyes circuitales, surgen en el dominiotransformado, las tres últimas expresiones de ( ) p Z .
A esta función de p se la conoce como impedancia operacional.-
6.5).-Resolución de circuitos aplicando la impedancia operacional
Aplicando el concepto de impedancia operacional y teniendo en cuenta la metodología indicada
en el diagrama de la Fig. 18, entonces dado un circuito en el dominio del tiempo es unaoperación casi automática la de escribir ese mismo circuito ya transformado.-
Ejemplo: Sea el siguiente circuito:
+
Modelo circuítal idealizado en el tiempo
R
C
L
e t
R
Ci1(t) i2(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 31/424
30
Transformando nos queda:
+
Luego, aplicando el método de mallas, el planteo de las ecuaciones de equilibrio transformada
son:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++= pC
R p I pC
R pL p I p E 1.)(1.)()( 21
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +++++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +−=
pC R pL
pC R p I
pC R p I
11.)(
1.)(0 21
El planteo en forma matricial sería:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +−
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++
0
)(
)(
)(
.2
21
11
2
1 p E
p I
p I
pC pL R
pC R
pC R
pC R pL
Este concepto es el mismo, para el que se planteen las ecuaciones por el método de los nodos.-
Modelo circuital idealizado transformado
R E(p)
R
1/pCI1(p) I2(p)
pL pL
1/pC

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 32/424
31
Ejemplo7:
Veremos la resolución de un circuito por aplicación del teorema del valor inicial.
El circuito de la Fig. es excitado por la función escalón unitario ( )t μ .
+ +≡
Se desea conocer el valor inicial de la tensión de salida ( )0r e .
Del circuito transformado se desprende:
( ) ( )11
11
1
+=⇒
+=
+=
pRC
C p I
C pR pC
R
p p I
Pero ( ) R p I p E R ×=)(
( )1+
=∴ pCR
RC p E R
El teorema del valor inicial nos dice:
( ) ( ) ( ) p E p Limt e Lime R p
Rt
R .00 ∞→→
==
.111
.)(. Volt
p RC
RC Lim
pRC
RC p Lim p E p Lim
p p R
p=
+=
+=∴
∞→∞→∞→
Se concluye que el valor inicial de la tensión de salida, o sea en el momento en que se le aplica
( )t μ , es igual a 1 Volt., o sea igual a la tensión de entrada.
Este resultado era de esperar, puesto que en ese instante el capacitor C se comporta como un
cortocircuito.-
C
µ(t)i(t)
R er(0)
1/pC
1/p I(p) E(0)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 33/424
32
Ejemplo 8:Veamos ahora una aplicación del teorema del valor final.
+ +
≡
En el circuito de la figura se aplica una tensión continua E y luego de transcurrido todo el
transitorio, la corriente ( )t i se establece en un valor permanente, o sea toma un valor final.
Este valor final de ( )t i es el que buscamos.
La excitación es ( ) ( ) ( ) p E p E t μ E t e =∴= .
Del circuito Transformado se desprende:
( )( ) R pL p
E
R pL
p E p I
+=
+=
El teorema del valor final nos dice que: ( ) ( ) p I p Limt i Lim pt
.0→∞→
=
( )( ) R
E
R pL p
E p Limt i
p f =
+=∴
→.
0
Luego, el valor final de la corriente es R
E como era de esperar, puesto que en corriente
continua la inductancia no tiene ningún efecto.-
L
e(t) i(t) R
pL
E/pI(p) R = =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 34/424
33
6.6).-Consideración de las condiciones iniciales
Veamos el caso de la Figura 19.-
+ +
-
En este circuito, al momento del análisis, existen condiciones iniciales no nulas, puesto que antes
de cerrar la llave S en 0=t , el capacitor se halla cargado y tiene una tensión entre sus bornes
igual a Vo .-La ecuación del circuito será:
( ) ( ) ( )∫+= .1
. dt t iC
t i Rt e
Transformando esta ecuación será:
( ) ( ) ( )
pC
dt t i
pC
p I p I R p E ent 0
)(. =∫
++=
La dt t i ).(∫ en 0=t representa la carga inicial del capacitor y esta expresión dividida por la
capacidad C nos da la tensión V0 inicial.
p
Vo
pC
I p I R p E
p++=∴
)()(.)( ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=−∴
pC R p I
P
Vo p E
1.)()(
Todo ocurre como si el circuito estuviera sometido a dos excitaciones.
El primer termino )( p E , es la transformada de la excitación y por tanto depende de la misma.En cambio el segundo término representa las condiciones iniciales que se introduce como un
generador de tensión del tipo constante, quedando el circuito:
s R
Ce(t) i(t) V0
Figura 19
=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 35/424
34
+ +-
-
p
V
p
E
pC R p I 01
.)( −=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
p
V E
pC R p I 01
.)( −
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
RC p R
Vo E
pC R p
Vo E p I
1
1.
11
.)(+
−=
+⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=∴
La antitransformada de esta función figura en tablas.-
∴ RC t
e R
Vo E t i
−−= .
`)(
Como vemos este circuito es el mismo de la Fig. 16, al cual se le ha agregado una tensión inicial
sobre el capacitor.
Comparado las dos expresiones de la respuesta podemos decir:
“La incorporación de las condiciones iniciales en el análisis de un circuito, no modifica la forma
de la respuesta, sino únicamente la amplitud de las misma”.-
E-V0/R
i(t)
t
1/pC
E/p I(p)
V0/p
s
=
=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 36/424
35
Caso con inductancia:
+
Veamos el caso de un circuito R-L en el cual ene el instante 0=t en que se cierra la llave s ya se
encuentra circulando la corriente 0i , lo que me dice que las condiciones iniciales no son nulas.
Escribimos la ecuación de equilibrio del circuito:
Transformando esta ecuación nos queda:
)0(.)(.)(.)( f L p I pL p I R p E −+=
)0( f es el valor de )(t i en 0=t que en esta caso es 0)( io f =
⇒−+=∴ 0)(.)(.)( Li p I pL p I R p E )(.)()( 0 pL R p I Li p E +=+
Al igual que el caso anterior, acá ocurre como si el circuito estuviera sometido a dos excitaciones.
La primera que depende del tipo de excitación y la segunda, que representa las condiciones
iniciales y que se introduce como un generador de tensión constante.
El circuito nos queda:
≡ )(.)()( 0 pL R p I Li p E +=+
+
+
Concluyendo:
dt
t di Lt i Rt e
)()(.)( +=
E(p)
s
I(p)
pL
Li0
R
e(t)
i(t)
R s
L
i0
Figura 20

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 37/424
36
Se puede establecer una regla para el caso de condiciones iniciales no nulas.
1)
- + ≡ Se transforma en - +
2)- +
≡ Se transforma en =
Generalizando: Para el caso de un circuito R, L y C, que tenga por condiciones iniciales una
corriente )0(i circulando por la inductancia y una tensión 0V en los bornes del capacitor, seria:
- +
+
El circuito transformado sería:
- = + + = -
+
Luego la ecuación transformada seria:
⎟ ⎠ ⎞⎜
⎝ ⎛ ++=−+
pC pL R p I
p
Vo Li p E 1.)()( 0
En este caso se hizo la equivalencia con fuentes de tensión constante, pero si escribimos de otra
forma y llamando a:
V0
C V0/p
1/pC
L
i0 Li0
pL
L
i0 V0
CR
i(t)
e(t)
pL V0/p1/pC R
I(p)
E(p)
Li0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 38/424
37
)()1
( p Z pC
pL R =++
Entonces:
)(.)()( 0 p Z p I P
Vo Li p E =−+ )(
)()()(
)( 0 p I p Z
pVo
p Z
Li
p Z
p E =++∴
En este caso nos quedan todas las fuentes como fuentes de corriente.
6.7).-Caso de Nodos
Cuando se deben plantear ecuaciones de nodo, es más ventajoso sustituir las condiciones
iniciales por esquemas con generadores de corriente como sigue:
En la inductancia:
∫= dt t v L
t i L L )(1
)( Transformando, ⎭⎬⎫
⎩⎨⎧= ∫ dt t v L
t i L L )(1
)( LL
Transformando nos queda:
(
pL
dt t v
pL
pV p I t i
t en L
L L L
0)(
)()()(
=∫+==L
Pero la L
dt t v L∫ )( en 0=t , no es otra cosa que la corriente inicial 0i
Luego nos queda:
L p
i
pL
pV p I t i L
L L .
)()()( 0+==L
Con lo que podemos establecer la siguiente transformación.
≡ pL
i
pL
pV p I L
L0)(
)( +=
En el capacitor
dt
t dvC t i c
c)(
.)( =
+
i0
VL t
iL t
VL(p)+
L
i0/pL
pL

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 39/424
38
Aplicando la transformación:
0.)(.)0(.)(.)( V C pV pC vC pV pC t i ccc −=−=L
VoC pV pC p I cc .)(.)( −=∴
Puesto que la tensión en los bornes del capacitor en 0=t es Vo .
Luego podemos establecer la siguiente transformación:
≡ CVo pCV p Ic p −= )()( V0
vc(t)+
ic(t)
Vc(p)+
C 1/pC
+ -
CV0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 40/424
39
7).-Régimen forzado y régimen transitorio
Volvamos de nuevo al circuito RL en serie de la figura 20 y reconsideremos el proceso de su
resolución desde un punto de vista algo diferente, lo cual es de utilidad debido a las
interpretaciones físicas que lleva consigo, y a las relaciones que dicha interpretaciones guardan
con las consideraciones puramente matemáticas.
Repetimos la ecuación del circuito.
)()(
.)(. t edt
t di Lt i R x=⎟
⎠
⎞⎜⎝
⎛ + [1]
Pertenece al tipo conocido como ecuación diferencial lineal con coeficientes constantes.
La solución (también llamada integral) de esta ecuación, es aquella función )(t i que reduce la
ecuación a la identidad )()( t et e x x ≡ .
Es decir, al sustituir dicha función del tiempo )(t i , en la suma de términos
)()(t Ri
dt t di
L +⎟ ⎠ ⎞⎜
⎝ ⎛ , esta se convierte en la función )(t e x .
Es lógico esperar que la función del tiempo )(t i que conduce a este resultado dependerá de la
naturaleza de )(t e x .
Según esto, la función )(t i que se adapta a la naturaleza de )(t e x , es una función muy especial o
muy particular, y por tal motivo recibe el nombre de integral particular de la ecuación [1].
Designaremos a esta función como )()( t i p .
Aunque esta función del tiempo constituye una solución en el sentido de que satisface la
ecuación dada, puede demostrarse que ella, )()( t i p , es sólo una parte de una función del tiempo
más general, la cual también satisface la misma ecuación.
Este hecho puede comprobarse si se considera, además de la Ec [1], la siguiente:
0)(
.)(. =⎟ ⎠
⎞⎜⎝
⎛ +dt
t di Lt i R [2]
En la cual el segundo miembro es cero.
Una solución de esta ecuación, es una función del tiempo )(t i tal que hace que la suma de
términos del primer miembro sea cero, para todos los valores determinados.
Bajo cierto aspecto es una integral particular correspondiente a 0)( =t e x .

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 41/424
40
Designando a esta función del tipo como )(0 t i , se ve fácilmente que la suma:
)()()( 0 t it it i p += [3]
Satisface la ecuación [1], porque hace que la suma de términos ⎟
⎠
⎞⎜
⎝
⎛ +dt
t di Lt Ri
)(.)( ,
se transforma en la expresión 0)( +t e x , la cual evidentemente es igual a )(t e x .-
La función )(0 t i que satisface la ecuación [2] se denomina función complementaria.
La suma de la integral particular y la función complementaria, expresada por la ecuación [3], se
conoce como solución completa de la ecuación diferencial [1].
La integral particular refleja solamente la naturaleza de )(t e x .
Por otra parte, la función complementaria contiene las constantes de integración apropiada
mediante las cuales la solución completa adquiere la flexibilidad necesaria para satisfacer las
condiciones arbitrarias que pueden especificarse en un momento determinada (usualmente se
elige el correspondiente a 0=t )
Veremos a continuación como se le da interpretación física a los pasos puramente matemáticos
presentados anteriormente.
En un problema físico, )(t e x representa frecuentemente una tensión de excitación estacionaria,
ya sea, el valor constante de la tensión de una batería, o de un generador de C.C, o bien una
tensión senoidal variable con el tiempo y de amplitud constante.
Sin embargo como se indica en la figura, puede ocurrir que esta excitación estacionaria no esté
siempre conectada al circuito.
Es decir el interruptor s puede pasar de la posición cerrado a la posición abierto durante el
intervalo en que se esta observando el comportamiento del circuito.
Por otra parte, la integral particular )()( t i p reconoce únicamente por definición el patrón
estacionario de )(t e x y por lo tanto representa físicamente la respuesta que la red daría si el
interruptor s hubiera estado cerrado durante el intervalo de observación.
También puede decirse que )(t i p representa el comportamiento físico del circuito después de
transcurrido un tiempo suficientemente largo del cierre inicial del interruptor, de tal modo que
las formas de este comportamiento son esencial y únicamente controladas por la naturaleza de
)(t e x .
De acuerdo con lo expuesto anteriormente, la integral particular )(t i p se identifica de este modo
con lo que físicamente se denomina comportamiento de estado estacionario.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 42/424
41
Puesto que esta parte de la solución refleja la naturaleza de la función excitación )(t e x , se dice
también que dicha parte representa el comportamiento forzado de la red.
Es lógico que el comportamiento final de un circuito después de la aplicación súbita de una
fuerza motriz consista en imitar el carácter de dicha función fuerza motriz.
También es lógico y razonable esperar que el modo permanente de este comportamiento final, nose establezca necesariamente en el instante inmediato a la introducción de la fuerza motriz en la
red.
De este modo, puede imaginarse que la red al principio se opone a las exigencias impuestas por
la excitación aplicada, pero, tratándose de un a red pasiva y por consiguiente no teniendo
material de energía con que sostener la oposición, va cediendo gradualmente hasta quedar
totalmente sometida.
La intensidad y duración de la oposición inicial, depende esencialmente del grado de diferenciaexistente entre el modelo de comportamiento impuesto por la fuerza motriz y el característico de
la red en sí.
Este último, denominado comportamiento natural de la red, es una expresión de lo que la red
tiene tendencia a hacer cuando se abandona a si misma.
Es este estado no excitado, o exento de fuerza, el comportamiento de la red se rige por la Ec.
[2].
De esta forma se ve que la función complementaria )(0 t i representa físicamente elcomportamiento natural de la red.
El comportamiento resultante aparece como una superposición de los modos de, comportamiento
forzado y exento de fuerza, de la red.
La respuesta de comportamiento forzado o de estado permanente, corresponde matemáticamente
a la integral particular.
La respuesta de comportamiento exento de fuerza, o natural o transitoria, se identifica con la
función complementaria.Sumándolas, se obtiene el comportamiento resultante ó la solución completa.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 43/424
42
8).-Análisis de las funciones operacionales de los circuitos en base a las configuraciones de
polos ceros.
Ya demostraremos mas adelantes que todas las funciones de red tienen la forma de un cociente
de polinomios en p.
011
1
011
1
)(
)()(
b pb pb pb
a pa pa pa
p D
p N pT
nn
nn
mm
mm
+++
+++==
−−
−−
KK
KK [1]
En donde los coeficientes a y b son reales y positivos para las redes de elementos pasivos y
fuentes no controladas.
Ahora, la ecuación N(p) = 0 tiene m raíces y D(p) = 0 tiene n raíces.
Tanto N(p) como D(p), se pueden escribir como un producto de factores lineales que incluyen
estas raíces:
)()())((
)()())((.)(
21
21
ni
mi
p p p p p p p p
z p z p z p z p Ao pT
−−−−−−−−
=KK
KK [2]
en donde bnamo /= es una constante que se conoce como factor de escala y
m z z z ,..., 21 y
n p p p ..., 21 son frecuencias complejas.
Cuando la variable p tiene los valores m z z z ,..., 21 , la función de red se hace nula.Este tipo de frecuencias complejas se denominan los ceros de la función red.
Cuando la variable p tiene los valoresn
p p p ..., 21 , la función de red se hace infinita,
Estas funciones complejas son los polos de la función de red.
En la ecuación [2] los factores )( i z p − , se denominan factores de ceros y )(
i p p − son los
factores de polo.
Los polos y los ceros son útiles para describir las funciones de la red.
Se observa en las ecuaciones [1] y [2] que una función de red queda especificada por completa
mediante sus polos, sus ceros y el factor de escala.
Cuando r polos o ceros de la ecuación [2] tienen el mismo valor, se dice que el polo o cero tienen
multiplicidad r , aunque con frecuencia se usaran términos como doble triple etc., para describir
la multiplicidad si el polo o el cero no se repiten, se dice que es simple o distinto.
A los polos y los ceros de valor ∞ se les asigna también un grado:
cuando nm > en la ecuación [1], el polo en el infinito es del grado o multiplicidad nm − ;
cuando nm < , el cero en el infinito es de grado mn − .

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 44/424
43
Si para cualquier función racional de red se toma en consideración (además de los polos y los
ceros finitos), a los polos y los ceros, en cero e infinito, el número total de ceros es igual al
número total de polos.
Por ejemplo, la función de red:
)12)(12)(1(
)3()(
2
j p j p p
p p pT
−+++++
= [3]
Tiene un cero doble en 0= p (el origen), un cero en –3, y polos en -1, -2+j1 y -2-j1.
Si el factor (p + 1) estuviera elevado al cuadrado, entonces )( pT , habría tenido un polo doble en
–1 y un cero en el infinito.
Los polos y los ceros de )( pT de la ecuación [3] aparecen en el plano p en la Fig. 1.
Es conveniente utilizar el símbolo O para designar la ubicación de un cero y el símbolo X para la
ubicación de un polo.
2 Ceros
Los polos y los ceros son “frecuencia criticas”.
La función de red se hace infinita en los polos, en tanto que en los ceros se hace cero.
Magnitud de la función de red
Figura 2. La magnitud de una función de red, presentada en función de la frecuencia compleja
con dos polos y un cero.
X
X-2-3
-j1
+j1
σ
jω
-1
Figura 1
Cero
Polo
Polo
-jω
+σ

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 45/424
44
A otras frecuencias complejas, la función de red tiene un valor finito distinto de cero.
En la Fig. 2 se muestra una representación tridimensional de la magnitud de la función de
transferencia, en función de la frecuencia compleja para un cuadrante del plano p.
La porción del plano complejo que se representa en la Fig. 2 se muestra en la Fig. 3.
Fig. 3. Los polos y ceros ubicados en el cuadrante superior, correspondena la porción del plano p que se ilustra en la Fig. 2. (cuadrante II)
Esta función particular de red tiene cuatro polos finitos, un cero finito y un cero de tercer orden
en el infinito.
El polo representa una frecuencia a la que la función de red “estalla”.
El cero representa una frecuencia a la que se produce el comportamiento opuesto la función de
red se “anula”.
Las expresiones “estallar” o “anularse” suenan como un comportamiento más bien drástico de la
función de red.
Se podría pensar que conviene evitar por completo los polos y los ceros para seleccionar
funciones de red.
Sin embargo, este no es el caso, los polos y los ceros son la vida misma de una función.
Sin polos y ceros la función se reduce a una constante aburrida, monótona y sin objeto (una
función que no cambia en ninguna condición).
Sin polos y ceros, la representación tridimensional de la función de red se convierte en un
desierto matemático - absolutamente plano.-
X
X
I
X
X
R -R
←3 ceros en
Plano p
(II)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 46/424
45
8.1).-Análisis:
¿Qué se puede aprender de una grafica de polos y ceros?
Una respuesta posible se deriva de la ecuación:
)()()( p E pT p R x×= [4]
Como ya veremos mas adelante la ecuación [4] nos expresa que la respuesta transformada de una
red es igual al producto de la función transferencia transformada del circuito, por la función
excitación transformada que se le aplica al mismo.
En el problema normal, )(t e x se especifica y )( pT se deduce o partir de la red.
El problema consiste en encontrar la respuesta, )(t r .
Supongamos que como es habitual en teoría de los circuitos, tanto )( pT como )( p E x
son
cocientes de polinomios en los cuales el grado del denominador es superior al del numerador.
Cuando el segundo término de la ecuación [4] se desarrolla por fracciones parciales, el
denominador de cada término de fracción parcial da un polo de )( pT o bien de )( p E x ; es decir
cuando no hay raíces repetidas en el denominador de )( p R .
Esto es:
)(
)()(
p D
p N pT
T
T = y
)(
)()(
p D
p N p E
E
E X =
Reemplazando estas dos ultimas expresiones en la Ecuación [4] y expresando los polinomios de
los denominadores en función de los polos, resulta:
))..()..()((
)(
))..()..()((
)()(
2121 Em Ej E E
E
TnTiT T
T
p p p p p p p p
p N
p p p p p p p p
p N p R
−−−−×
−−−−=
DondeTi p son los polos de )( pT y Ej p los polos de )( p E x
Descomponiendo en fracciones parciales queda:
∑∑== −
+−
=m
j Ej
Ejn
i Ti
Ti
p p
K
p p
K p R
11
)( [5]
Donde Ti K y Ej K son los residuos de )( p R en los polos
Ti p de)( pT y
Ej p de
)( p x E respectivamente.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 47/424
46
Recordemos de tablas que:
)(..1 t e K p p
K t pi
i
i i μ +− =
⎭⎬⎫
⎩⎨⎧
−L
Aplicando esto a la Ec. [5], la respuesta puede escribirse:
( ) ( )∑∑=
+
=
+− +==m
j
t p Ej
n
i
t pTi t e K t e K p Rt r EjTti
1
.
1
.1 )(..)(..)()( μ μ L [6]
Los términos de la primera sumatoria dependen fundamentalmente de )( pT por lo que se
denominan “componentes libres o naturales” de la respuesta transitoria.
La forma de cada componente está determinada por los polos Ti p que se denominan “frecuenciaslibres o naturales” de la respuesta.
Los términos de segunda sumatoria depende fundamentalmente de )( p E x por lo que se
denominan “componentes forzados” de la respuesta permanente y los polos Ej P , “frecuencia
forzadas” de la misma.
En consecuencia, los polos determinan la forma de onda en función del tiempo de la respuesta.
En cambio, los ceros determinan la magnitud de cada parte de la respuesta, ya que controlan la
magnitud de Ti K y Ej K , en el desarrollo en fracciones parciales, como se verá más adelante.-
Tomemos como ejemplo, para el análisis de los visto, un circuito general R, L, y C con
condiciones iniciales nulas, en el cual se lo excita con una función conocida y queremos analizar
la respuesta del mismo que en este caso consiste en la corriente )(t i .
≡
L C
i(t)
ex t
pL 1/pC R
I(p)
Ex(p+ +
Circuito TransformadoFigura 4

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 48/424
47
Del circuito transformado se obtiene:
)1(
)()(
pC pL R
p E p I x
++=
Llamando a:
)(1
p Z pC
pL R =++ Impedancia operacional del circuito, nos queda:
)(.)(
1)( p Ex
p Z p I = [7]
La respuesta )( p I , la hemos dividido en dos factores, para compararla con la Ec. [4].
El primer factor, que es la inversa de la impedancia operacional, representa la función
Transferencia )( pT ) y en él intervienen sólo los parámetros del circuito.
El otro factor representa la transformada de la excitación Ex(p).
Podemos afirmar, en base a lo visto hasta ahora, que los polos de la excitación, si no son
cancelados por el otro factor, aparecen en la respuesta o sea en )( p I y son los responsables del
régimen permanente y que tendrá la misma forma de la excitación.
De lo contrario si dichos polos se cancelan, podríamos asegurar que no hay régimen permanente
o forzado, en la respuesta del circuito.
Para aclarar esto vamos a excitar al circuito con excitación de corriente continua:
⇒= )(.)( t E t e x Transformando: p
E p E x =)(
Retomando la expresión [7]:
1.
1.
)1(
1.)(
22 ++=
++=
++=
pRC LC p
C E
LC p pRC
pC
p
E
pC pL R p
E p I [8]
Al eliminarse el polo de la excitación, no tendremos régimen permanente, como se puede
confirmar del análisis físico del circuito.-
Si ahora se excita el mismo circuito de la Fig. 4 con una función senoidal en el tiempo, el
desarrollo será:
.)( ⇒= t sen E t e x Transformando (de tablas):22
.)( p
E p E +
=ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 49/424
48
Escribiendo la expresión de la respuesta:
)(.
)1()(
222 p
E
pRC LC p
pC p I
+++=
ω
En este caso, al no eliminarse los polos de la excitación, existirá régimen permanente, como
surge del análisis de un circuito de C.A. y la respuesta tendrá la forma de la excitación, que como
sabemos, será también del tipo senoidal.-
Conclusiones:
A).-Los polos de la excitación, determinan el comportamiento del régimen permanente o
forzado del circuito.-
B).-Cuando los polos de la transformada )( p E x de la excitación, no aparecen en la respuesta,
el sistema no tiene régimen permanente.-
C).-Los parámetros del circuito son responsables del régimen transitorio; o sea la forma del
régimen transitorio no depende de la excitación.
A continuación haremos el análisis completo del mismo circuito de la Fig. 4 pero cuando se loexcita con una señal escalón E (corriente continua).
Por lo tanto retomemos la expresión [8].
LC L
R p p
L E
LC p
L
R p LC
C E
pRC LC p
C E p I
1)
1(
.)1(
.)(222
++=
+=
++=
Tiene dos polos ( 1 p y 2 p ), por ser el polinomio del denominador de la respuesta, una ecuación
cuadrática del tipo 02 =++ cbxax , donde LC
c y L
Rba
1;1 ===
))(()(
21 p p p p
L E
p I −−
=∴

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 50/424
49
∴ Los dos polos serán:
2
4
2
4
2
2
2,1 LC L
R
L
R
a
acbb p
−⎟ ⎠
⎞⎜⎝
⎛ ±−
=−±−
=
LC L
R
L
R p
1
22
2
2,1 −⎟ ⎠
⎞⎜⎝
⎛ ±−= del tipo: β α j p ±−=2,1
Del análisis de la expresión de los polos, vemos que puede tomar tres valores bien
diferenciados:
a).-Que los polos sean complejos conjugados.
b).-Que sean imaginarios puros, o sea 0=α .
c).-Que los polos sean reales puros o sea 0= β j
Empezamos por analizar el caso a).-
a).-Polos complejos conjugados ⎟ ⎠ ⎞⎜
⎝ ⎛ ⟨
C L R 2
Para este caso entonces debe cumplirse que:
2
2,12
2
2
1
24
1⎟ ⎠
⎞⎜⎝
⎛ −±−=∴> L
R
LC j
L
R p
L
R
LC
Para hallar la antitransformada de la respuesta, aplicamos el teorema de los residuos:
t pe p I de siduos p I t i .1 .)(Re)()( ∑== −L en los polos de )( p I
Calculamos el residuo de 1 K en el polo 1 p
t pt pe
p p
L E
K p pe
p p p p
L E
K .
2111
.
2111
11 .)(
).(.))(( −
=⇒−−−
=
Calculamos el residuo de 2 K en el polo 2 p

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 51/424
50
t pt pe
p p
L E
K p pe p p p p
L E
K .
1222
.
2122
221 .)(
).(.))(( −
=⇒−−−
=
Siendo: β α β α j p y j p −−=+−= 21
Además:2
2
12 ⎟
⎠
⎞⎜⎝
⎛ −=−= L
R
LC y
L R β α
Con los dos residuos 1 K y 2 K ya podemos hallar )(t i
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−−
−=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−+
−=+=
2121122121
2121)(
p p
e
p p
e
L
E
p p
e
p p
e
L
E K K t i
t pt pt pt p
[ ]t jt jt pt pee
j
L E
ee p p
L E
t i )()(
21.
2)(.)( 21 β α β α
β
−−+− −=−−
= [9]
[ ]⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=−=
−−−−−
j
eee
L
E eeee
j
L E
t it jt j
t t jt t jt
2.....
2)(
β β α β α β α
β β [10]
Finalmente la respuesta del circuito a la función escalón es:
t sene L
E t i t β
β
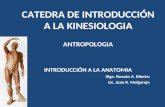
α ..)( −= [11]
Que es una respuesta oscilatoria amortiguada, cuya amplitud decrece exponencialmente con una
constante de amortiguamiento absoluta α, como se muestra en la Fig. 5
Fig. 5. Respuesta oscilatoria amortiguada
X
X
jβ
jω
-jβ
-α R
t sene A t
β α ..0
− α τ 1=
t e A α −.0
t e A α −− .0
t
i(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 52/424
51
Esto se cumple siempre que2
2
4
1
L
R
LC > o sea
C
L R 2< .
A este valorC
L Rc 2= , se le llama “resistencia crítica” porque a partir de este valor
el circuito está en condiciones de oscilar con pulsación β .
b).-Polos imaginarios puros conjugados (R=0)
Por tanto si hacemos 0= R , por simple inspección de las formulas anteriores (Ec. [11]), al hacer
0=α nos da una respuesta oscilatoria pura o entretenida.
t sen L
E t i β β
=)(
Cuya representación grafica es la siguiente.
β
π 2=T
Fig. 6 Repuesta oscilatoria entretenida de período T = 2π/β
De la expresión de )(t i vemos que la amplitud de la oscilación vale β
L E
y la pulsación β ω = .
En consecuencia, cuanto mas cercanos al origen están los polos, mas baja es la frecuencia de la
senoide.
En el límite, cuando los dos polos conjugados se encuentran en el origen, el periodo se hace
infinito y el polo doble da lugar a una rampa.
X
X
jβ
I
-jβ
R
L
E
β
L
E
β −
i t
t

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 53/424
52
c).-Dos polos reales negativos (R > R c)
Veremos el caso en que Rc R >
2
2
1⎟
⎠
⎞⎜
⎝
⎛ <∴ L
R
LC
Por lo tanto estamos en el caso en que los polos son reales negativos y de distinto valor absoluto.
Si analizamos la expresión de2,1 p vemos que en este caso siempre son reales y negativa o sea:
22
11
α β α
α β α
−=−−=
−=+−=
p
p
Retomando la Ec. [9]
)()( 21
21
t pt p ee p p
L E
t i −−
=
Reemplazando a p1 y p2, nos queda: [ ]t t ee
L
E t i 21
2)( α α
β
−− −=
Cuya representación seria:
Fig. 7. Respuesta aperiódica sobre amortiguada.-
Otra forma:
Retomando la Ec. [9]
[ ] [ ]t t t t t t t pt peeee
L E ee
L E ee
p p
L E
t i )()()()()()(
21..
22)()( 21 β α β α β α β α
β β
−−−−−+− −=−=−−
=
X
-α1
I
R X
-α2
)t t ee A 21.0
α α −− −11
1α
τ =
t e A 1.0
α −
t e A 2.0
α −−
t
22 1α τ =
A0
-A0
i(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 54/424
53
⇒⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −=
−−
2)(
t t t ee
e L E
t i β β
α
β t senhe
L
E t i t β
β
α .)( −=
Entonces para Rc R > , la respuesta es del tipo aperiódica sobreamortiguada.-
Por ultimo nos queda por analizar el caso particular de Rc R = .
Para esta condición seguimos estando en el caso de polos reales puros (caso c).
En este caso es 0= β por lo que las raíces de la ecuación cuadrática coinciden y por lo tanto hay
un solo polo y es doble.
Volvamos al comienzo, a la expresión de )( p I siendo:
α −== 21 p p
221 )())((
)(α −
=−−
= p
L E p p p p
L E t i
La antitransformada de esta función de p , figura en tabla y vale:
t et L
E t i α −= ..)(
Cuya representación grafica es la siguiente:
Fig. 8 Respuesta aperiódica con amortiguamiento critico.-
Por lo tanto cuando Rc R = nos de a una solución también aperiódica, pero es la más rápida
posible, dentro del régimen aperiódico.
La resistencia Rc es la que define el límite entre estados oscilatorios y aperiódicos.-
8.2).-Conclusiones:
Hemos visto que los polos de las respuestas son raíces de la ecuación 0)( = p Z .
Estas raíces serán en general complejas.Los valores de β α y (parte real e imaginaria), nos determinarán el carácter de la respuesta.
[X]
-α
I
α τ 1=
t e
α −
t
A0
i(t)
t L
E .
i(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 55/424
54
En base a los casos que acabamos de analizar, podemos resumir las siguientes conclusiones:
a).- 21 p y p , complejos conjugados:
Si están situados en el semiplano izquierdo, o sea con parte real negativa, hay oscilaciones
amortiguadas.Si están situadas en el semiplano derecho o sea con parte real positiva, la oscilación tiende a
aumentar indefinidamente en amplitud.
El sistema es inestable.
Si no hubiera manera de interrumpir el proceso el circuito se destruiría.
En la práctica, la saturación en transistores estabilizan la amplitud de los oscilaciones,
trasladando los polos al eje imaginario.-
b).- 21 p y p , imaginarios puros conjugados:
Hay oscilaciones entretenidas, esto ocurre cuando no hay elementos disipativos, si los hay, la
acción de estos la compensan.
Estamos en presencia de un oscilador, dispositivo en el que provocada una perturbación
cualquiera, continua oscilando permanentemente.-
c).- 21 p y p , reales y negativos:
En este caso la respuesta es aperiódica.
Como vimos anteriormente, de acuerdo a los valores que toma R será la constante de
decrecimiento y el caso limite es para Rc R = , que es la respuesta mas rápida.
Por lo tanto la posición de los polos en el plano complejo nos indica el tipo de respuesta.
Las raíces o polos 21 p y p se denominan frecuencias libres o también modos naturales de
oscilación del circuito, donde la variable p es la variable compleja y contiene:
α = parte real, que representa el amortiguamiento
β = parte imaginaria, que representa la pulsación
Por ultimo debemos hacer una aclaración con respecto a la excitación.
Los modos naturales de oscilación de un circuito no dependen de la forma de la excitación
aplicada, pero si de las condiciones del circuito de entrada donde dicha excitación es aplicada.
Es decir, dependen si se lo excita con una fuente de tensión o con una de corriente, por la
impedancia interna que ella introduce en el circuito.Por eso es necesario en cada problema definir las condiciones de excitación.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 56/424
55
9).-APLICACIONES DE LAPLACE AL ANÁLISIS DE ALGUNOS CIRCUITOSESPECIALES
9.1).-Caso 1
En el siguiente circuito excitado con una función escalón )(.)( t E t e = hallar:
a).-La corrientes que entrega la fuente, a partir del momento en que se cierra la llave s.
b).-Hallar la tensión ABV a partir del momento en que se abre la llave s, suponiendo que se ha
llegado al estado permanente (inicialmente L y C están descargados).
)(.)( t E t e = =
Fig. 9. a) Circuito en el dominio del tiempo
=
b) Circuito transformado
a).-Hacemos el planteo de mallas.
⎟ ⎠
⎞⎜⎝
⎛ ++−+=
+−+=
2
12)())((
))(())((
21
21
pL R p I pL R p I O
pL R p I pL R p I p
E
A
R
s
R
CL
i1(t) i2(t)
B
+
s
E/p
R
1/pC pL
I1(p I2(p
A
B
+

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 57/424
56
Despejamos )(1 p I (en forma matricial), que es la corriente que entrega el generador.
21 )(12.)(
12.
)12()()()(
)12(0
)(
)( pL R pC
pL R pL R
pC pL R
P
E
pC pL R pL R
pL R pL R
pC pL R
pL R p
E
p I +−⎟ ⎠ ⎞⎜
⎝ ⎛ +++
⎟ ⎠ ⎞⎜
⎝ ⎛ ++
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+++−
+−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
+−
=
∴
)222(
12.)(
2222221 L p pLR R
C L L p pLR
pC R pLR R
pC pL R
p
E p I
−−−+++++
++=
⎥⎦⎤⎢
⎣⎡ +++
++=
⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ +++
++=
)(.1)(.
12.
2
12.)(
2
1
pL R pC
pl R R
pC pL R
P
E
C L
pC R pLR R
pC pL R
P
E p I
( )
( )
( ) ⎟ ⎠ ⎞⎜
⎝ ⎛ ++
⎟ ⎠ ⎞⎜
⎝ ⎛ +++
=⎟ ⎠ ⎞⎜
⎝ ⎛ ++
++=
pC R pL R
pC R pL R
p
E
pC R pL R
pC pL R
P
E p I
1.
1
.1.
12.)(1
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+
+
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+
+
=
)1
(
1
)(
1.
111
.)(1
pC pR pL R p
E
pC R pL R p
E p I
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
+=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
++
+=
)1(
1
)1(
1.
)1(
1
)1(
1.)(1
RC p
R
L p p
R
E
RC p R
R L p pR
E p I
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
+
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
+
=)1(
)(
)1(
1
)(
1.)(1
RC
P
R E
R
L
P L
R
p
R E
RC
p
p R
L
R
L
p
R
E p I
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
+=
)1()()(1
RC p
R E
R
L p
L
R p
R E
p I

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 58/424
57
Ahora debemos hallar la antitransformada de )(1 p I para ello lo hemos dividido en dos sumando,
de los cuales el segundo, tiene antitransformada directa de tablas.
RC t
e
R
E
RC p
R E −− ⇒
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+
.
1
1L
La antitransformada del primer sumando la hallamos por residuos como vemos tiene dos polos,
uno en 01 = p y otro en L
R p −=2 .
R
E K
R
E
R
L
L
R R
E p
R
L
P L
R
p
e R
E
K
t p
p
=∴=
⎟ ⎠
⎞
⎜⎝
⎛
⎟ ⎠
⎞
⎜⎝
⎛ =
⎟ ⎠
⎞
⎜⎝
⎛
+
=∴=
1
1
11
..1
01
t L
Rt L
R
t P t P
p
e R
E K
R
L
L
R
e R
E
R
L p
e R
E
p L
R
R
L p
L
R p
e R
E
K
L R
−−
−=∴−
==⎟ ⎠
⎞⎜⎝
⎛ +
⎟ ⎠
⎞⎜⎝
⎛ +=
−=
..
.
.
...
.2
2
2
22
2
RC t t
L R
RC t
e
R
E e
R
E
R
E e
R
E K K t i
−−−+−=++=∴ ...)(
.21
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −+=∴
−− t L
R
RC t
e R
E e
R
E t i
.1..)(
Observamos que para ∞→t la corriente por la rama capasitiva tiende a cero, de acuerdo al
primer miembro de )(t i y la corriente por la rama inductiva, tiende a R
E , quedando en
definitiva para ∞→t la corriente igual a R
E en un todo de acuerdo con el análisis físico del
circuito.-
E/R
t L
R
L ei.−
=
RC t
C ei
−
=
i(t)
t

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 59/424
58
b).-Cuando se abre s, decimos que el circuito llegó al régimen permanente.
Quiere decir que la corriente por la bobina L es la )(t i para t →∞ y por la rama del
capacitor no circula corriente, pero si sabemos que el capacitor se ha cargado el valor E ,
por tanto el circuito queda:
i0 = E/R+
=V0 = E
Planteamos la ecuación por la rama inductiva.
)(.)( pL R p I R
E LV AB +−=+ [10]
A su vez planteando la ecuación de la malla cerrada:
)12(.)( pC
pL R p I R
E L
p
E ++−=+
pC pL R
R E L
p E
p I 12
)()(
++
+−=∴ [11]
Reemplazando la expresión de I(p) de la Ecuación [11] en la ecuación [10]
)12(
)1()(.
12
)()(
pC pL R
R L p pL R E
R
E L
pC pL R
R E L p E pL R
R
E LV AB
++
+++−=
++
+++−=
)12(
)1()(
)12(
)1()(
2C
L p pR
R L p pL R
E R
E L
pC pL R
R L p pL R
p
E
R
E LV AB
++
+++−=
++
+++−=
)12(
)
2
22
C L p pR
R L p pL pL R
E
R
E LV AB
++
++++−=
R R
pC pL
I(p)
A
B
+
L(E/R) E/p
+
-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 60/424
59
C pR L p
R L Ep EpL ER
R
E
C
L
R
E L L p pR
R
E L
V AB 12
2)()2(
2
222
++
+++−−−=
LC L R p p
RC L R
E
V
C pR L p
RC L R E
V AB AB 12
1
12
)(
22 ++
⎟ ⎠ ⎞⎜
⎝ ⎛ −
=⇒++
−−= [12]
2
22 1
1
L
R
LC L
R p
RC L
R
E
V AB
−+⎟ ⎠
⎞⎜⎝
⎛ +
⎟ ⎠
⎞⎜⎝
⎛ −=
llamando222
01
L
R
LC −=ω
2222 )(
1(
)(
)1(
o
o
oo
AB
L
R p
pC L R
L
R p
RC L R
E
V
ω
ω
ω ω ++
×−
=++
−−= [13]
Aplicando Residuos a la Ec. [12] o por Tablas a la Ec. [13], se obtiene:
⎟⎟ ⎠ ⎞
⎜⎜⎝ ⎛
−
−−= − t sene
L R
LC
RC L R
E
V t L R AB ω .
22
.1
)1(
Pero 11
)1(
1
)1(2
2
2
22
−−=−
−=
−
−
C R L
C R L
L
RC R
L L
R
L R
LC
RC L R
Luego para 0
2
>Oω :
t seneC R
L E t V t
L
R
AB 0
.
2 ..1.)( ω −
−−=
Nos da una respuesta oscilatoria amortiguada. Graficando:
VAB(t)
t L
R
e A.
0−
t L
R
e A.
0−
−
t

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 61/424
60
Esto se cumple para 020 <ω lo que implica que los serán complejos conjuntos con parte real
negativa.
En el caso que sea 020 <ω nos queda en la ecuación [13]
22
.)1(
o
o
o
AB
L
R p
RC L R
E
V
ω
ω
ω −⎟
⎠
⎞⎜⎝
⎛ +
−=
De acuerdo a tablas:
t seneC R
L E t V
t L
R
AB 0
.
2..1.)( ω
−−−=
Lo que nos arroja una respuesta aperiódica.
Por ultimo si 020 =ω es:
01
2
2=−
L
R
LC
01
01
01
=−∴=−∴=⎟ ⎠
⎞⎜⎝
⎛ −∴ RC L
R
L
R
RC L
R
RC L
R
Como vemos, esta última expresión es el numerador de )( pV AB en la ecuación [13] con lo que
020 =ω , quedando:.
0)( =t V AB

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 62/424
61
9.2).-Caso 2
Análisis del corto circuito en bornes de un generador sincrónico de C.A.
Estudiaremos el caso del corto circuito monofásico, pero las mismas condiciones son aplicables
a circuitos trifásicos.
El circuito equivalente de un generador de corriente alterna monofásico consiste en una fuente de
tensión alterna con una impedancia interna igual a su reactancia sincrónica (despreciando el
efecto de la resistencia del arrollamiento estatórico).
Por tanto, el caso de un corto circuito en bornes del generador constituye un circuito
fundamentalmente inductivo.
Tendremos un régimen de corriente alterna con excitación del tipo:
)(cos.)( += t E t e
)cos(cos.)( sent sent E t e −=∴
Transformando:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−
+=
2222..cos.)(
ω
ω ϕ
ω ϕ
p sen
p
p E p E
La corriente de corto circuito será:
s pL
p E p I )()( = con condiciones iniciales nulas.
Luego:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−
+=
2222.
1.cos.)(
ω
ω ϕ
ω ϕ
p sen
p pL
E p I
s
⎥⎥⎦
⎤⎢⎢⎣
⎡+
−+
=)(
.1.cos.)(2222 ω
ω ϕ
ω ϕ
p p sen
p L
E p I
s
i t s se cierra en t = 0
Ls
e(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 63/424
62
Multiplicando porω
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−
+=
)(..cos.)(
22
2
22 ω
ω ϕ
ω
ω ϕ
ω p p sen
p L
E p I
s
Debemos hallar la antitransformada de esta última expresión.
Vemos que el primer término del corchete tiene antitransformada directa por tabla.
t sen p
ω ϕ ω
ω ϕ .cos.cos
221 =
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+−L
El segundo miembro lo haremos fracciones parciales:
)(.)(.)(
2222222
2C Bp p p A
p
C Bp
p
A
p p+++=⇒
+
++=
+ω ω
ω ω
ω
2222222 )( ω ω ω ω A pC B A p pC Bp A Ap +++=⇒+++=∴
11y00 =∴==+=∴ B A B A;C
Luego:
2222
2 1
)( ω ω
ω
+−=
+ p
p
p p p
Luego la antitransformada total de la corriente de cortocircuito es:
[ ]t sen sent sen. L
E i(t)
s
ω ϕ ϕ ω ϕ ω
coscos +−=
434214 4 4 34 4 4 21
DC decomponente
S
AC decomponente
S
sen L
E t sen
L
E t i
..
.
.)(.)( ϕ ω
ϕ ω ω
−+=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 64/424
63
Representación gráfica: s L
E A
ω =0
Como vemos, tanto de la expresión de )(t i como de su representación gráfica, el resultado es una
corrientes asimétrica.
Por eso a la suma de los dos componentes de corrientes, se la conoce como corriente de cortocircuito asimétrica.
Efecto del instante en que se produce el cortocircuito
De las expresiones anteriores.
)(cos)( += t E t e
[ ]ϕ ϕ ω ω sent sen L
E
t i s −+= )(.)(
Veremos el efecto de dos instantes diferentes, cuando en 0es0 ==t y otro, cuando en
º90es0 ==t eléctricos.
Veamos primero el caso en que 0es0 == ϕ t
E t e =∴ )( , valor máximo de e(t) en t = 0.
t E t e cos)( =∴
e(t)
i(t)
t
t
φ
)(cos)( ϕ ω += t E t e
)(0 ϕ ω +t sen A - Componente de C.A.
ϕ sen−
0 A Corriente total de cortocircuito (asimétrica)
Componente de C. Directa

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 65/424
64
Finalmente nos queda: t sen L
E t i
s
ω ω
=)(
Como vemos no hay componentes de corriente directa.
Es decir si el corto circuito ocurre cuando el voltaje es máximo, entonces no existe la
componente de C.D. y la corrientes se llama corriente de corto circuito simétrica.-
Cuando el corto circuito ocurre en t = 0 y es º90−= eléctricos, tendremos:
t sen E t E t E t e ϕ =−=+= )º90(cos)(cos)(
t sen E t e =)(
y la corriente de corto circuito
[ ] [ ]1cos)º90()º90()( −−=−−−= t Ls
E sent sen
Ls
E t i ω ω
[ ]t
Ls
E t i ω cos1)( −=∴
e(t)
i(t)
t
t

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 66/424
65
O sea que cuando el corto circuito ocurre en un instante en que el voltaje no es máximo, entonces
si existen componentes de corriente continua y la corriente de corto circuito recibe el nombre de
“corriente de corto circuito asimétrica”.-
e(t)
t
t
s L
E A
ω =0
A0
t sen E t e ω =)(
t A ω cos0−
Corriente de corto circuito (asimétrica)
Componente de C.D.
Componente de C.A.
i(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 67/424
66
9.3).-Caso 3
Análisis de Redes Activas (Oscilador RC)
Hasta ahora hemos supuesto que las redes estudiadas se componen sólo de elementos pasivos y
las explicaciones se han basado en la afirmación de que las redes pasivas son estables en el
sentido de que la ubicación de los polos de las funciones de red que las describen, excluyen al
semiplano derecho del plano complejo p.
El hecho que las redes activas (por ejemplo, una que contiene fuente controlada o dependientes),
no son necesariamente estables se mostrara mediante un ejemplo sencillo.
Oscilador RC:Determinación de la frecuencia de oscilación de un oscilador RC.
Figura 9
Calcularemos el valor de la amplificación A, necesaria para que el circuito sea un oscilador.Es decir, para que las frecuencias de oscilación queden situadas en el eje imaginario.
Las ecuaciones de equilibrio del circuito, según el método de las mallas es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+−
−+
0
)(
)(
)(
11
12 2
2
1 p E
p I
p I
pC R
pC
pC pC R
Pero como en este circuito hay realimentación, es:
[ ] R p I A p E A p E .)(.)(.)( 212 ==
Por lo tanto escribiendo la ecuación de la primera malla
0).1
()()2
()(.)()(
)2
()( 2122
1 =+−+⇒=−+ R A pC
p I pC
R p I R p I A pC
p I
pC R p I
R CI1(p)
I2(p)
R C
AE2 E1 E1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 68/424
67
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ −
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
0
0
)(
)(
11
12
2
1
p I
p I
pC R
pC
AR pC pC
R
En este caso la ecuación característica, no es más que el determinante de la matriz [Z] igualada acero.
011
12
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ −
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
pC R
pC
AR pC pC
R
Resolviendo el determinante
01112
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−⎟⎟
⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ + AR
pC pC pC R
pC R
( ) ( )0
12222
2 =−−+++ pC
AR
pC pC pC
R
pC
R R
( )0
132
2 =−−+ pC pC
AR
pC
R R
( ) ( ) ( ) ( )[ ] 013013 222 =−−+⇒=−−+∴ p RC A p RC RC A p pCR [14]
Ecuación del tipo 02 =++ cbxax .
Es fácil ver que para que las raíces de esta ecuación estén sobre el eje imaginario puro ω j , deber
ser el coeficiente 0=b en la ecuación cuadrática, lo que implica que debe ser 3= A .
Entonces haciendo 3= A , los polos nos quedan:
RC j p
12,1 ±=∴
Pero como f j j p π ω 2==
( )222,1 y1con
4
4 RC ac
a
c j
a
ac j p ==±=±=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 69/424
68
La frecuencias de oscilación será:
⇒= RC
j f j1
2π RC
f π 2
1=
Determinaremos ahora el lugar geométrico de 21 y p p cuando A varia.
Las expresiones de 21 y p p son:
( )
( )
( )
( )
( )
( )4
22
222,14
4
2
3
2
3
RC
RC
RC
RC A
RC
RC A p −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −±
−=
( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
−±
−−=∴ 1
4
3
2
31 2
2,1 A A
RC p [15]
En esta ultima expresión hacemos variar A.
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ±−=⇒=
2
5
2
31 0Para 2,1
RC p A
( )011
1Para 2,1 j RC
p A ±−=⇒=
( )101
3Para 2,1 j
RC
p A ±=⇒=
( )011
5Para 2,1 j RC
p A ±=⇒=
Representando en el plano polar:
Fig. 10. Lugar geométrico de los polos de la función de transferencia conforme A varíe de 0 a ∞.
A=3
A=5
A=3
A=0A=1A=0
A=∞
1/RC
R
I
-0,4-2,6
A
A

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 70/424
69
De acuerdo con este resultado, se ve que las ubicaciones de los polos quedan determinadas
mediante la constante A y también que los polos se desplazarán en el plano p conforme A
aumente de 0 hasta un valor muy grande.
El lugar geométrico de las raíces de la ecuación [14] se muestra en la Fig. 10.
Estas gráficas se utilizan con mucha frecuencia para estudiar sistemas y se conocen comográficas del lugar geométrico de las raíces.
De acuerdo con estas gráficas, se observa que los polos son reales y negativos para todos 1≤ A y
en esta zona no aparece ningún tipo de oscilación.
Desde 1= A hasta 5= A , los polos se mueven sobre distintas mitades de la circunferencia de
centro en el origen y radio RC 1 .
Para 5> A , los polos están otra vez sobre el eje real pero permanecen en la mitad derecha del
plano p, uno desplazándose hacia el cero y el otro hacia el infinito.Es evidente que los polos pasan la frontera crítica que es el eje imaginario para un rango de
valores de A y por lo tanto, la salida de la red puede ser estrictamente estable, oscilatoria o
inestable.
Este lugar geométrico de raíces es típico de todo sistema cuya ecuación característica es de
segundo grado.
Se afirma que una red activa (o para el caso, cualquier sistema general) es “estable” si la función
de transferencia que relaciona la salida con la entrada, tiene polos que están confinados en lamitad izquierda del plano y el eje imaginario, y “estrictamente estable” si los polos se encuentran
solo en el medio plano de la izquierda.
En consecuencia una red activa es estable si oscila con una magnitud constante, correspondiendo
esto al caso de polos sobre el eje imaginario (es el caso de los circuitos osciladores).
Para que una red sea estrictamente estable, se excluye la posibilidad de oscilación con una
magnitud constante, lo cual significa que quedan excluidos los polos del eje imaginario.
De acuerdo con lo expuesto, se puede observar que un requisito equivalente para un sistema
estable es que una entrada limitada debe dar origen a una salida limitada.
Por consiguiente, en una red estable, una entrada que tiene la forma de escalón, no producirá una
salida que tenga términos como t sent et t t ω ×ó,, 2 etc.
Esta es una definición conceptualmente conveniente de la respuesta de una red estable.
En la red de la Fig. 9 se observa que tiene una respuesta que es estrictamente estable cuando
3< A , y establece cuando 3≤ A .
Cuando 3= A , el voltaje de salida oscila al valor de la frecuencia hallado.
Para 3⟩ A , la salida oscila con una amplitud que aumenta sin límite con el tiempo.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 71/424
70
Puesto que la estabilidad se determina por la ubicación de los polos, como se acaba de ver, es
posible establecer las condiciones necesarias para la estabilidad en función de un requisito
impuesto al polinomio del denominador de la función transferencia que relaciona la salida con la
entrada.
Sea este polinomio:
nnnn
T T
T a pa pa pa p D p D
p N pT ++++=⇒= −
−1
110)(
)(
)()( L
De acuerdo con )( p DT , se puede indicar el requisito para la estabilidad en función de una
pregunta sencilla: ¿Tiene 0)( = p DT raíces con partes reales positivas (0 cero)?
Cuando se responda a esta pregunta, queda determinada la estabilidad de la respuesta de la red.
Una respuesta obvia a la pregunta que acaba de proponerse deriva cuando las raíces de la
ecuación 0)( = p DT , se determina utilizando una computadora digital.
Sin embargo, con mucha frecuencia el interés reside no tanto en los valores numéricos de las
raíces como responder sencillamente si o no la pregunta ¿es estable la red?
Entonces el problema es el siguiente: si se da un polinomio que tiene coeficiente reales ¿cuántas
de las raíces de la ecuación 0)( = p DT tienen partes reales positivas?.
Para una red estable, la respuesta debe ser ninguna.
Para responder a esta pregunta existen muchas reglas, algoritmos y criterios que pueden aplicarse.Los más conocidos son los criterios de Routh-Hurwitz y el de Nyquist.
Pero esto no es tema de este capitulo.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 72/424
71
9.4).-Caso 4
Análisis del transitorio producido por el transformador de tensión capacitivo (tvc.), luego de una
falla en la línea
IntroducciónUn transformador de tensión capacitivo (TVC.), consiste básicamente en un divisor
de tensión capacitivo (C1;C2), acoplado a la carga mediante un reactor de sintonización L0 y un
transformador inductivo T.
El divisor (C1;C2), donde C1 es el capacitor primario y C2 es el capacitor intermedio que permite
reducir la tensión en los bornes primarios U p a un valor VC2 situado entre 10/√3 Kv a 36/√3 Kv
aproximadamente.
El transformador capacitivo, cuyo uso se difunde cada vez más presenta sobre el magnético,
numerosas ventajas:
a).-A partir de los 100 Kv de alcance aproximadamente, su costo es menor.
b).-Es más seguro en servicio.
c).-El capacitor del divisor, sirve como elemento de acoplamiento del sistema detelecomunicaciones por onda portadora.
d).-El capacitor es en cierto grado un elemento de protección contra sobretensiones.
Alta tensión
ZB
TL0
C2
C1
VC2
VpBaja tensión
Figura 1 T.V.C

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 73/424
72
Forma de conectar la O.P.
La señal de audiofrecuencia (ver fig. 2), se aplica a la bobina B que
presenta, para la frecuencia industrial, una impedancia de 10 Ω.
Esta no tiene prácticamente efecto, contra los 30 K Ω de impedancia de C2.
Explosor
Fig. 2 Conexión del TVC al equipo de Onda Portadora.
El explosor se coloca a fin de preservar el equipo de Radio, de los efectos de sobretensión de la
línea.
Habíamos dicho que la tensión sobre 2C era del orden de Kv310 ; a los efectos de
transformar esta tensión a la tensión secundaria ).V3101 se coloca el transformador T.
El reactor Lo esta sintonizado con la capacitancía equivalente ( )21;C C a la frecuencia nominal
de la red, a fin de lograr que las tensiones primarias y secundarias del TVC estén en fase y así
disminuir el error de la medición.
Además generalmente los transformadores capacitivos vienen provistos en el secundario del
transformador T de un circuito de supresión de la ferroresonancia, al cual está conectado en
paralelo con la carga.
Los transformadores son fundamentalmente no-lineales pero debido a su diseño es posible
analizar su comportamiento utilizando circuitos equivalentes lineales para una gran parte de su
campo de trabajo, incurriendo solamente en errores de 2do orden.
Para la operación fuera de este rango, por ejemplo cuando el núcleo de un transformador o
reactor se satura, la no-linealidad juega el papel más importante en el desempeño de circuito.
En el caso de un TVC son susceptibles de entrar en situación el reactor Lo , el transformador
intermedio T y cualquier elemento inductivo presente en el secundario.
L0
C2
C1
B
Al Equipo
de Radio

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 74/424
73
En el análisis efectuado aquí solo se tomarían en cuenta los fenómenos transitorios que se
producen en el TVC sin que ningún elemento de los arriba señalados entren en saturación lo cual
no le quita validez al análisis.
Circuito equivalente simplificado del TVC
secundariaTensión:
primariaTensión: carga;deImpedancia: .;ferroresonsup.Filtro:
intermedioTrafo: ión;sintonizacdeReactor: ;intermedioTerminal:
intermedioCapacitor: primario;Capacitor: primario;Terminal: 21
B
p B
V
V Z Z
T Lo I
C C P
Para simplificar la comprensión de las diversas oscilaciones transitorias que aparecen en los
terminales secundarios del TVC, es posible transformar el circuito de la Fig. 3, aplicando
Thevening en los puntos A y B y nos queda:
Se puede probar que la corriente 3 I que fluye en este circuito es igual a la que fluye en el
circuito anterior.
ZB
T L0
C2
C1
VC2
V p
Figura 3
A
B
I2 I3
I1
VB
P
ZB
(C1+C2)
Figura 4
A
B
IB
21
1.C C
C VpVi+
= VB

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 75/424
74
Además el capacitor equivalente resulta ser ( )21 C C + , siempre y cuando ambos capacitores
tengan los mismos factores de pérdidas, lo cual se cumple en la práctica pues ambos son del
mismo tipo.
Idéntica consideración cabe para el factor escalar ( )211 C C C + que afecta a la tensión Vp .
A su vez cada uno de los elementos de la Fig. 4 puede reemplazarse por su equivalente de la Fig.
5.
( ) 21 =+= C C C E Capacitor equivalente.
=o L Inductancia del reactor de sintonización (se desprecia la inductancia de dispersión de T).
= E R Resistencia de pérdidas dieléctricas del capacitor E C más la resistencia de o L (se
desprecia la resistencia del T).=T C Capacitancia de pérdidas del bobinado primario del T.
=T R Resistencia que representa las pérdidas en el hierro del T.
=T L Inductancia de magnetización del transformador T.
Respuesta transitoria del TVCTodo fenómeno transitorio ocurre debido a que los niveles de
energía toman un cierto tiempo para cambiar, ya que un cambio instantáneo requeriría una
potencia infinita.
De esta manera se genera un estado transitorio durante el cual, los niveles de energía se
acomodan a los nuevos valores según las constantes de tiempo del sistema.
Refiriendo al primario el secundario nos queda la Fig. 6:
CE = 100 μF ; CT = 600 nF ; L0 = 105 mH ; R T = 8 Ω ; R E = 3 Ω ; LT = 14 Hy ; R B = 440 Ω
CT R T LT
R EL0
CE
Vi
Figura 5. Circuito equivalente al de la Fig. 14
CT R T LT
R EL0
CE
Vi
Figura 6. Circuito equivalente referido al primario del TVC
R‘B V‘B
Ii
IC IR IL
IB

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 76/424
75
Como se ve en la Fig. 6, el transformador capacitivo posee varios elementos reactivos, los cuales
son capaces de almacenar energía y de hecho así lo hacen durante el estado estable.
Cuando la tensión primaria cambia súbitamente, la energía almacenada en los campos reactivos
se descargan a través del circuito TVC y de la carga, provocando así los fenómenos transitorios.
A medida que la carga (prestación) aumenta, fluye corriente a través de los componentesreactivos y se almacena mayor energía en el circuito resonante del TVC, incrementando de esta
forma la magnitud del transitorio.
Al almacenarse mayor energía, aumenta las magnitudes de las condiciones iniciales en el circuito
y esto hace que aumente la magnitud del transitorio.
Esto quiere decir, que si la respuesta es oscilatoria amortiguada, al variar las condiciones
iniciales, variará la amplitud de la misma, pero la respuesta seguirá siendo oscilatoria
amortiguada.
Diagrama vectorial:
Podemos apreciar que la tensión de entrada y la de salida están en fase (el TVC es un circuito
resonante la frecuencia de línea).
Las tensiones en el capacitor equivalente y el reactor o L , se encuentran en contra fase y
desfasados en más o menos 90º del vector i I (corriente de entrada).
Sabido es que la energía acumulada en un capacitor es:
2.2
1cc V C E =
y en la inductancia es:
2.
2
1 L L I L E =
VL0
ICT
ILT
VCE
IR IB Ii VCT Vi ≡ V’B
V p
Figura 7. Diagrama Vectorial del TVC

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 77/424
76
Tanto c E como L E varían en forma periódica si LC I V o son funciones periódicas y sus
respectivos picos se corresponderán con los valores máximos de LC I V e respectivamente.
Recordando que (ver Fig. 4):
p pi V k C C
C V V ..
211 =+=
Podemos afirmar que hay dos casos bien definidos para la energía acumulada en los elementos
reactivos:
Caso A.- Caso en que la falla (corto circuito en el borne primario del TVC), se produce
cuando P V pasa por cero, siendo máximas las energías en:
: E C Capacitancia equivalente
:T L Inductancia de magnetización.
Caso B.- Caso en que la falla (corto circuito en el borne primario del TVC), se produce
cuando P V pasa por un máximo, siendo máximas las energías en:
:o L Inductancia del reactor de sintonización.
:T C Capacitancia de pérdidas del bobinado primario de T.
Es evidente que la respuesta transitoria del TVC depende del punto de la onda de tensión primaria en que se produce la falla, porque según sea ese punto, será distinta la energía
acumulada en los componentes reactivos.
En definitiva, la respuesta total será la suma de los transitorios provocados por cada elemento
considerado por separado.
De ahí que podemos estudiar cada casa en particular como sigue a continuación.
Transitorios provocados por elementos reactivos (carga resistiva)
Caso A.- Transitorio generado por la energía acumulada en la capacidad E C y la inductancia
T L de magnetización.
Vemos que la tensión en E C es:
E
iCE
C p
I V
.=
L energía máxima es: E
iCE E C
C p
I V C E
2
22 .
2
1..
2
1max ==

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 78/424
77
Cuando i I crezca lo hará max.C E , o dicho de otra forma, el módulo de la tensión en el
capacitor es mayor cuanto mayor es la prestación.
Cuando la tensión primaria pasa por cero, la tensión en E C es máxima.
Suponiendo que en ese instante la tensión primaria se haga cero (cortocircuito en bornes
primario del TVC), vamos a analizar el transitorio resultante postergando para más adelante el
análisis de la influencia de T L en la respuesta final.
El circuito equivalente simplificado a utilizar es el de la Fig. 8.
≡
Del circuito ( ) E o BCE
pC pL R p I p
V 1.)(
)0( ++=⇒
( ) E BO
CE
E o B
CE
C pR L p
V
pC pL R
pV p I
11 2)0()0(
++=
++=∴
( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++
=
E O B
B
BCE
C L p L
R p
R
L
RV p I
10
20
)0(
Si se considera que: E BO
B
C R L
R 1>> [1]
Entonces podemos escribir que:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++
E B
B E O
O
B
C R p
L
R pC L P
L
R p
11
0
2
( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
=∴
E BO
B
B
o
BCE
C R p
L
R p
R
L
RV p I
1
)0(
L0
CE
R B
VCE(0)
pL0
1/pCE
R B
VCE(0)/p
+
I(p)
Fig. 8

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 79/424
78
De esta última expresión obtenemos los dos polos.
O
B
E B L
R p
C R p −=
−= 21 y
1
Hallaremos la antitrasformada por Residuos:
( )
( ) ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−
=
+⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
+=
−
=
O
B
E B B
O
C R
t
BCE
E BO
B
B
O
E Bt P
BCE
p p
L
R
C R R
L
e RV
C R p L
R p
R
L
C R pe RV K
E B
1
.
1
1. )0(
1
)0(1
1
1
Teniendo en cuenta la condición dada por la Ecuación [1]
E BC Rt
B
CE e
R
V K
−= .)0(
1
Ahora hallamos 2 K
t L
R
B
CE
E B
B
B
t L
R
BCE
p p
O
B
B
e R
V
C R L
R
R
L
e RV K
−−
=
−=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−
= .1
. )0(
0
0
)0(2
0
2
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −=+=∴
−−
t L R
C Rt
B
CE O
B
E B ee R
V K K t i .
)0(21
Teniendo en cuenta que:
( ) ( ) Bt B Rt iV ×=
y que:
E B E CE
C RVi
C IiV
ω ω maxmax)0( == [2] porque O E LC y están en resonancia.
( )
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=∴
−
− t
L
R
C Rt
E B
t B O
B
E B eeC RVi
V .
1
max ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 80/424
79
Fig. 9 Transitorio del TVC debido a CE
Esto se calcula para Ω= K R B 440 , siendo a sus ves:
msC Rms R
L E B
B
O 44. y 23,0 21 ==== τ τ [3]
Esto prueba que la influencia de O L es despreciable frente a E C .
Si graficamos la respuesta transitoria, vemos que esta consiste en una función aperiódica
gobernada principalmente por la descarga de E C a través de la resistencia de carga B R .En 0=t , la tensión arranca de cero con una constante de tiempo de crecimiento de
aproximadamente O B L R=τ , debido a que la corriente en el lazo no puede tomar
instantáneamente el valor de BCE RV .
Las ecuaciones [2] y [3] no muestra que, a medida que disminuye B R o sea a medida que
aumenta la prestación, el pico del transitorio aumenta pero la constate de tiempo de descarga,
disminuye.
Fig. 10Variaciones de la respuesta con la carga (prestación)
t
τ2
VB t
τ1
1
2
1 : Carga elevada, R B <
2 : Carga reducida, R B >
Vi max
VCE t
τ2 = 44 ms
VB(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 81/424
80
El efecto se encuentra en la Fig. 10, donde pueden compararse dos transitorios para baja y alta
carga.
A través del análisis precedente se pudo comprobar que la influencia de L0 es despreciable frente
a la de E C .
Resta por verificar que influencia tiene T L en el transitorio.
Para ello y tomando en cuenta la consideración anterior, vamos a obtener la respuesta del
circuito de la Fig. 11 en el cual para simplificar, no se considera a L0.
=
Figura 11
En este circuito se cumple.
( )213
321
iii
iii
−=∴
+=
( ) B B B Rii RiV 213 . −== [4]
Por otro lado tenemos que:
E B E CE E BCE
pC V C V pC V p
V i ,.. )0(
)0(1 −=⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
T
B
pL
V i =2
Reemplazamos estas dos expresiones en [4]
BT
B E B E CE B R
pL
V pC V C V V ...)0( ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−=
E BCE BT
B B E B B C RV R
pL
V R pC V V .... )0(=++∴
( T E BCE BT E BT B LC R pV R pLC R L pV ..... )0(2
=++∴
pLT
1/pCE
R BVCE(0)/p
+
i2
i3i1
VB

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 82/424
81
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++
=∴
E T E BT E B
T E BCE B
C LC R p p LC R
LC R pV V
11
....
2
)0(
( )
E T E B
CE
B
C L p
C R p
pV pV
1.1
.
2
)0(
++=∴
Llamando:
E B E B C RC R 21 12 =∴= θ θ
E T E T C LC L .1 1 02
0 =∴= ω ω
Nos queda:
( )22
)0(
.2
.
o
CE B
p p
pV pV
ω θ ++=
Con polos
222,1 o p ω θ θ −±−=
Si 22θ ω >
o, la solución es compleja conjugada.
222,1 θ ω θ −±−=∴ o j p
Llamando 220 θ ω ω −=d nos queda: d j p θ ±−=2,1
Luego la expresión de ( ) pV B nos queda:
( )( )( )21
)0(.
. p p p p
pV pV CE B −−
=
Hallaremos la antitransformada por residuos:
( ) ( )t p
d
CE
d d
t pCE
t pCE
p p
e j
pV
j j
e pV
p p
e pV K 1
11
1
.2
.... 1).0(1)0(
21
1)0(1
ω ω θ ω θ =
+++−=
−=
=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 83/424
82
( ) ( )t p
d
CE
d d
t pCE
t pCE
p p
e j
pV
j j
e pV
p p
e pV K 2
22
2
.2
.... 2)0(2)0(
12
2)0(2
ω ω θ ω θ =
−+−−=
−=
=
Luego la antitransformada será:
( ) ( )t pt p
d
CE
B e pe p j
V
K K t V 21 ..2 21
)0(
21 −=+= ω
( ) ( ) ( )t jt j
d
t CE t jt t jt
d
CE B
d d d d e pe p j
eV ee pee p
j
V t V
ω ω θ
ω θ ω θ
ω ω
−−
−−− −=−= 21)0(
21)0(
.2
.....
2
llamando:d
t CE
j
eV A
ω
θ
2
.)0( −
=
nos queda:
( ) ( ) ( )[ ] ( )t j jt j jd
t jd
t jd B
d d d d eeee Ae je j At V ω γ ω γ ω ω
ω θ ω θ ω θ −−− −+=−−−+−= ....... 22
( ) ( ) ( )( )γ ω γ ω ω θ
−−− −+= t jt jd B
d d ee At V .. 22
( )( ) ( )
⎥⎥⎦⎤
⎢⎢⎣⎡ −+=
−−−−
jeeeV t V
t jt jt
d
d CE B
d d
2...
22)0(
γ ω γ ω θ
ω ω θ
( ) ( )γ ω ω
ω θ θ −+
=∴ − t seneV
t V d t
d
d CE B ..
. 22)0(
Adoptando los valores dados anteriormente, nos da:
seg
seg
seg
ms
d
C L E T
124
136,11
17,26
.881
1
=
=
==
==
ω
θ
ω
θ τ
ο
Este resultado demuestra que el efecto de T L , es el de producir una componente oscilatoriaamortiguada que resulta tener una frecuencia de:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 84/424
83
Hz f d 84,32
==π
ω
Representando la respuesta:
( ) ( )γ ω ω
ω θ θ −+= −
22
t seneV t V d t
d
CE B ... d)0(
Fig. 12 Respuesta total para cortocircuito en 0= pV
La influencia de B R en este valor es reducida, porque para cargas menores que la nominal, B R
aumenta o sea θ disminuye y por lo tanto d se cerca cada vez mas a 0 .
La respuesta final (tomando en consideración todos los factores), es una curva como la que se
muestra en la Fig. 12 a cual pasa por cero debido a la componente periódica, de frecuencia
aproximada [ ] 2121 E T C Lπ .
A su vez cabe señalar que se puede obtener un efecto parecido cuando la carga tiene una
componente inductiva en serie.
t
t ek θ −.
VB(t)
)( γ ω +t sen d
d
d CE V k
ω
ω θ 22
)0( . +=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 85/424
84
Caso B:
Transitorio generado por la energía acumulada en la inductancia ο L
y la capacidad ΤC .
Habíamos dicho que cuando ρ
V (tensión primaria) pasa por un máximo, la Ii (corriente de
entrada) también lo hace.
Por tanto, dado que la energía acumulada en ο L vale 2
2
1i L Ιο , esta será máxima en ese punto.
También será máxima la energía en ΤC , por lo que el transitorio generado a partir de una falla
que produce la caída de la tensión primaria desde un máximo a cero, esta dominado por dos
elementos ( )T O C L y fundamentalmente.
Para analizar el transitorio debido a ο L utilizamos el siguiente circuito.
=
≡
Fig. 13
Las condiciones iniciales para el capacitor E C en este caso son nulas, puesto que aquí es
( ) 00 =CE V .
Del circuito de la Fig. 13.
( ) ⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
++= E o Bno pC pL R p I I L
1
.
( )( ) E o B
no
pC pL R
I L p I
1++=∴
( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++
=++
=
E oo
B E o
E no
E B E o
E no
C L p
L
R pC L
pC I L
C pRC L p
pC I L p I
1..
1 22
L0CE
R B
pL01/pCE
R B
+
I(p)
Ii(0)=In L0.In
VBVB

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 86/424
85
Teniendo en cuanta la condición dada por la Ec. [1]
( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
=
E BO
B
n
C R p
L
R p
pI p I
1.
Con dos polos en:
E B
B
C R L
R p
1 py 2
01 =−=
Hallaremos la antitransformada por Residuos
t L
R
n
E BO
B
t L
R
O
Bn
p p
B
B
e I
C R L
R
e L
R I
K
.
.
10
0
1.1
. −
−
= =⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
=
Luego la antitransformada será:
( ) B B B R K K Rt it V .).()( 21 +==
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −=∴
−− E B
B
C Rt
E B
t L
R
Bn B eC R
Le R I t V ...)(
20
.0 Donde 6-
210 0,005×=
E BC R
Lo
Representando gráficamente
Fig. 14 Respuesta debida a o L (a carga nominal)
( ) E B
E B
C Rt
n
E B
o
E BO
B
C Rt
E Bn
p p
e I C R
L
C R L
R
eC R I K −
−
=−=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−
= ...1
.22
2
10 ms
VB(t)
t
V p(t)influencia de L0/R B
influencia de R B.CE

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 87/424
86
Esto demuestra que el transitorio está dominando esencialmente por la constante de tiempo de
BO R L .
Como se ve, este transitorio no tiene ninguna importancia práctica en el transitorio general ya
que se extingue en menos de un milisegundo, puesto que .23,0 msg R L BO ≤
Influencia de T C
En cuanto a la capacitancia T C , su influencia depende mucho de la carga y se
notará especialmente cuando B R es muy elevada o cero (en vacío).
Veamos el circuito:
=
Fig. 15
Del circuito escribimos la ecuación matricial.
( )
( ) ⎥
⎥⎥
⎥
⎦
⎤
⎢⎢⎢
⎢
⎣
⎡
=⎥⎥⎥
⎥
⎦
⎤
⎢⎢⎢
⎢
⎣
⎡
⎥⎥⎥⎥
⎥
⎦
⎤
⎢⎢⎢⎢
⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−
−⎟⎟
⎠
⎞⎜⎜
⎝
⎛ +
O
I L
p I
p I
pC R
pC
pC pL
pC
n
T B
T
T
o
T
0
2
1
11
11
De aquí despojamos ( ) p I 2
( ) 2211
.1
01
1
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −⎟⎟
⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
=Δ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
=
T T BO
T
T noT
nooT
pC pC R pL
pC
pC I L pC
I L pL pC
p I
( ) BOOT B
nO
T T
OO B
T T
B
T nO
R pL LC R p
I L
pC C
L L pR
pC pC
R
pC I L p I
++=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
=2222
11
( )
⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ +
=∴
T OT BT B
n
C L p
C R pC R
I p I
1122
pL0
1/pCT R B
+
I1(p)
L0.In
VB
I2(p)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 88/424
87
Luego:
( ) ( ) ( )
T OT B
T n B B B
C L p
C R p
C I pV R p I pV
11.
22
++=⇒=
llamando:
T OT B C LC R
1 y
12 2
0 == ω θ
nos queda:
( ) 20
22,12
02
con2
ω θ θ ω θ
−±=++
= p p p
C I pV T n
B
Si 22 θ ω >o la solución es compleja conjugada
220
2202,1 llamando θ ω ω θ ω θ −=⇒−±=∴ d j p
nos queda:
d j p θ ±−=2,1
( )( )21)(
p p p p
C I pV T n
−−=∴ B
Hallaremos la antitransformada aplicando Residuos.
( ) ( )t p
d
T n
d d
t p
T nt pT n
p pe
jC I
j jeC I e
p pC I K 1
11
1
.2..21
1ω ω θ ω θ −=+++−=−=
=
( ) ( )t p
d
T n
d d
t pT n
t pT n
p p
e j
C I
j j
eC I
p p
eC I K 2
32
2
.2
..
122
ω ω θ ω θ −=
−+−−=
−=
=
Luego:
( )
( ) ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ −=−=+=
−−
j
eee
C
I ee
jC
I K K t V
t jt jt
d T
nt P t P
d T
n
B
d d
2...
2
.
21
21ω ω
θ
ω ω
finalmente:
( ) t seneC
I t V d
t
d T
n B ω
ω
θ .. −=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 89/424
88
Cuya representación gráfica es la siguiente:
Fig. 16 Transitorio debido a T C (con carga nominal)
Para tener idea de la frecuencia de resonancia se la calcula:
Hz f d d 6362 == π
En la práctica, el resultado es una oscilación de alta frecuencia (636 Hz), fuertemente
amortiguada por la constante .5,0 msC R T B =
10 ms
VB(t)
t
V p(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 90/424
89
CONCLUSIONES:
Del análisis efectuado anteriormente, podemos afirmar que entre todos los
fenómenos transitorios producidos por el TVC el mas importante es el ocasionado por E C ,
cuando el cortocircuito es en bornes del transformador, estando pV pasando por cero.
En el caso de que el TVC alimenta a un relé de impedancia, este transitorio puede ocasionar
problemas.
Dado que él depende fundamentalmente de B R o sea de la prestación, se deduce que debe haber
un valor optimo de B R que disminuya la influencia del transitorio sobre el relé.
Sin embargo no es tan simple hallar este valor sin considerar antes la respuesta de los filtros del
relé a cada uno de estos transitorio y su influencia en la medición de distancia.
Por ejemplo, para un relé lento (del tipo electromecánico) le conviene que la carga sea la máxima,
para amortiguar el transitorio antes de comenzar a medir.
Para un relé rápido el caso es más complicado.
El problema de la ferro resonancia y la validez del análisis efectuado
Como se dijo anteriormente, el análisis acerca de los transitorios generados en el TVC ha girado
en torno a los errores producidos por la energía que queda atrapada en los elementos reactivos
del transformador, considerados como lineales.
Todas las oscilaciones transitorias que resultan del análisis se amortiguan con el tiempo, de
modo que luego de un cierto retardo, la señal secundaria vuelve a representar a la tensión en los
bornes primarios.
El fenómeno de la ferro resonancia da lugar también a oscilaciones que se pueden traducir como
mediciones incorrectas de la tensión de línea.
Estas oscilaciones están causadas por la saturación de los núcleos del reactor de sintonización
O L o del transformador T y consisten en cambios no lineales de energía con las capacitancías
del circuito, a frecuencias menores que la nominal.
A diferencia con el transitorio lineal, estas oscilaciones no ocurren siempre pero pueden ser
estables, sino se adapta algún método de corrección.
Luego de una falla en la línea, la tensión tiende a caer por lo que es difícil que tanto el
transformador T como el reactor O L se saturen.
Esto significa que el problema de la ferro resonancia no aparecerá luego de un falla, sino por
ejemplo durante la energización del TVC, en donde las sobre tensiones generadas en el sistema
pueden hacer que los elementos reactivos entren en la zona de saturación.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 91/424
90
Al mantenerse dentro de la zona aproximadamente lineal, los elementos del TVC pueden tratarse
mediante circuitos equivalentes, lo cual convalida el método seguido en el análisis.
En la práctica es necesario prevenir las oscilaciones subarmónicas debidas a la ferro resonancia
y para ello, se opta por insertar en el secundario del transformador T una impedancia Z que las
amortigue.Si esa impedancia esta permanentemente conectada, puede tener influencia en la respuesta del
TVC, luego de un falla en la línea.
Por esa razón, algunos fabricantes de transformadores capacitivos optan por disponer una
impedancia conmutable que sólo se conecta cuando el fenómeno de la forre resonancia se
presenta.
También aquí corresponde afirmar que una prestación elevada contribuye a minimizar el
fenómeno, aunque aumenta el error de medición del transformador y el transitorio lineal.La influencia del circuito de supresión de la ferro resonancia debe ser evaluada mediante los
ensayos de tipo del transformador capacitivo, ya que su análisis teórico es dificultoso debido a
las características particulares del mismo.
Sin embargo su efecto en la respuesta final del TVC, luego de una falla en la línea, es en
principio similar a la provocada por la inductancia de magnetización del T , esto es, agregar una
componente periódica amortiguada de frecuencia inferior a la nominal.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 92/424
91
FÓRMULA GENERALIZADA
DE
HEAVISIDE
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 93/424
92
ÍNDICE Pág.
Formula generalizada de Heaviside. ..................................................................................................................... 93
Excitaciones periódicas. ........................................................................................................................................ 99
Sistemas excitados por ondas periódicas no sinusoidales en régimen permanente. ........................................... 102
Determinación de la repuesta de un circuito a una función cualquiera, conocida la respuestadel mismo a la función impulso o a la función escalón / convolución. ........................................................... 107
Obtención de la repuesta temporal por convolución. .......................................................................................... 108
Producto de convolución. .................................................................................................................................... 108
Teorema de convolución. ..................................................................................................................................... 109
Antitransformación empleando el teorema de convolución. ................................................................................ 111
Obtención por convolución de la Repuesta Temporal a partir de la Repuesta al Impulso. ................................. 112
Obtención de la repuesta temporal en base a la repuesta al escalón. Integral de Duhamel. ................................. 117
Obtención de las integral de Duhamel a partir del principio de de superposición. .............................................. 121
Resolución de circuito por aplicación de la serie o integral de Fourier. .............................................................. 127
Transformada de Fourier para ondas periódicas. ................................................................................................. 127
Transformada de Fourier para ondas no periódicas. ............................................................................................ 128Aplicación de la integral de Fourier. ................................................................................................................... 129
Repuesta transitoria de un filtro pasa bajo (L.P) ideal a una función escalón. ..................................................... 134
Pulso rectangular de duración T1 aplicado a un filtro (L.P) ideal. ...................................................................... 138
Repuesta transitoria de un filtro pasa banda ideal (B.P) a la función escalón. .................................................... 141

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 94/424
93
FÓRMULA GENERALIZADA DE HEAVISIDE
La fórmula generalizada de Heaviside que veremos a continuación como aplicación a la
resolución y análisis de circuitos, es un caso, de los cuatros que conforman los teoremas sobre el
desarrollo de Heaviside en fracciones parciales.La formula general de Heaviside es aplicable a circuito bajos cualquier tipo de excitación; los
circuito deben tener polos simples y ninguno sobre el eje imaginario, excepto en el origen.-
Sea un sistema general con su función excitación, su función repuesta y su función transferencia
asociada.-
Siendo)(
)()(
p D
p N pT = Un cociente de polinomio en p
Se quiere encontrar la repuesta del sistema, cuando excitamos con una función excitación
genérica del tipo
st
e E t e .)( =
Con esta expresión, involucramos a casi toda las excitaciones más comunes, siendo s un numero
complejo.-
Si s = 0, corresponde a una excitación continua (escalón)
Si s = jω, corresponde a una excitación senoidal
Vimos que:)().()( p E pT p R =
Siendo la transformada de nuestra excitación genérica:
s p
E p E
−=)(
Luego
=−
= s p
E
p D
p N p R .
)(
)()(
s p p D
p N E
−1
.)(
)(.
Aparte del polo de la excitación en p = s, habrá p i polos de la transferencia, raíces de
D( p) =0
Por tanto, aplicando el teorema de residuos, será:
T(p)e(t) v(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 95/424
94
] st s p e
s p
s p
s D
s N E Ks ..
)(
)(.
−
−== ; Pero )(
)(
)( sT
s D
s N =
st e sT E s K ).(.)( =∴ [1]
Este es el valor del residuo en el polo en el polo de la excitación p = s.
Calcularemos ahora el residuo en el polo genérico pi de la transferencia
] t p
i
i
i
i
p pi i
ie
p D
p p
s p
p N E K
..)(
)(.
)(
)(.
−
−==
Pero)('
1
)(
)(
ii
i
p D p D
p p=
− donde ⇒)(' i p D es la derivada de D(p) en p = pi
it p
pii
i
i e D s p
p N E K
.
)( .').(
)(. −=∴ [2]
Luego sumando todo los residuos tendremos la repuesta υt
∑ =
−
−+= n
i
t i p
i
t s e p D s p
p N E e sT E t r
i1
. .)(').(
)(.).(.)(
El primer sumando, depende exclusivamente de la excitación, puesto que analiza la repuesta en
el polo de la excitación.
En tanto que el segundo término, depende exclusivamente de los parámetros del circuito, que son
las que fijan los polos de la transferencia.-
Por lo tanto, podemos decir, que el primer término corresponde al régimen forzado o permanente,
en tanto que el segundo corresponde al régimen transitorio.-
No habiendo polo sobre el eje jω el régimen forzado y el permanente coinciden.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 96/424
95
Ejemplo: Sea el siguiente circuito tanque y queremos hallar como repuesta la tensión Vs(t),
siendo la excitación un generador de corriente i(t)
Calculemos la función transferencia de este circuito
)./1..(.
).(
./1.
./1)..()(
RC p L pC p
L p R
C p L p R
C p L p R p Z
+++
=++
+=
Como )().()( I Z Vs = )()( Z T =∴
Luego
⎟ ⎠ ⎞
⎜⎝ ⎛
++
+=
+++
=
C L L
R p pC L
L R p L
C R pC L p
R L p pT
.
1...
)/.(
1....
.)(
22
Haciendo L R /.2 =α y C L./120 =ω nos queda.
( ) )(
)(
..2.
).2()(
2
0
2 p D
p N
p pC
p pT =
+++
=ω α
α
Como vemos T(p) tiene dos polos complejos conjugado.
i(t)C
L
R
vs(t)
×
×
p1
p2
β
-β
I (eje Imag.)
-α
R (eje Real.)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 97/424
96
β α
β α
j p
j p
−−=
+−=
2
1
Donde 220 α ω β −=
Consideremos ahora la excitación del tipo senoidal, luego el generador de corriente será.
t sen I t i .)( 0= o también [ ]t j
m e I I t i
ω ..)( 0=
Como vemos de la expresión de la excitación es s = j.ω
Luego el primer miembro de la fórmula de Heaviside (régimen permanente)
Será:
s I t Vse jT I I t Vs m
s
t j
m ν ω ν
ω
.)(.(..)( 0 =∴⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
= 43421
Hallaremos la expresión T (jω) que es el valor de T(P) en p = jω
[ ]⇒
+++
=2
0
2 2)(
2)(
ω ω α ω
α ω
j jC
j jT
)2(
.2)(
22
0 αω ω ω
α ω
jC
j jT
+−+
= [3]
)2(
).2(.
22
0
0
αω ω ω
α ω ν
ω
j
e j
C
I s
t j
+−+
=∴ [4]
y⎥⎦
⎤⎢⎣
⎡
+−+
=∴)2(
)..2(.)(
0
22
0
0
αω ω ω
ω α ν
ω
j
e j
C
I I t s
t j
m
[5]
Veamos cuanto vale la repuesta permanente para la frecuencia de resonancia o sea para ω = ω0.
Para ello en la expresión [4] hacemos ω = ω0
t jt j
e
C L L
R j
C L j L R
C
I
j
e j
C
I s 0.
.
1..
.
1./
.)..2(
)..2(. 0
220
0 ω ω
ω α ω ω
ω α ν
⎟ ⎠ ⎞
⎜⎝ ⎛
⎟ ⎠ ⎞
⎜⎝ ⎛ +
=+−
+=∴
t ω jt ω je
j
C L R
L j
C ω
I e
L
R j
C L j L R
C ω
I sν 00 .
)(.
1..1
..
..
.
1./
.. 0
0
0
0 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +
=
⎟
⎠
⎞⎜
⎝
⎛
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 98/424
97
t jt je jC L
RC
I e
j
C L R
L j
C
I s 00 ./.
1.
..
)(
...1.
. 0
0
0
0 ω ω
ω ω ν ⎟
⎠ ⎞
⎜⎝ ⎛ −=
⎟ ⎠ ⎞
⎜⎝ ⎛ +
=
Luego la repuesta permanente en resonancia esta dada por la Ec. [5]
⎥⎦
⎤⎢⎣
⎡−=∴ t j
m e jC L
RC
I I t s 0
0
0 )./.1
.(.
)( ω
ω ν
( )( )⎥⎦
⎤⎢⎣
⎡+−+= t ω jsent ω jsenφ
C
L
RC ω
I I t sν m ..cos.cos.1.
1.
.)( 002
0
0
Siendo
C
L
R
arctg φ
.1
1−=
)..coscos.cos..(cos1.1
..
)( 000020
0 t ω senφ senφ sent ωφt ω jsent ωφC
L
RC ω
I I t sν m +⎜
⎜⎝
⎛ −++=
Tomando la parte imaginaria.
( )φ sent ωφt ω senC
L
RC ω
I t sν .coscos.1.
1.
.)( 002
0
0 −+=
( )φt ω senC
L
RC ω
I t sν −+= 02
0
0 .1.1
..
)(
Haciendo el móduloC
L
RC
L
R.
11.
12
≅+ Será 0≅φ
( ) ( )t senC
LC L
RC
I t sen
C
L
RC
I t s 0
00
0
0 .....
..1
..
)( ω ω ω
ν ==
Luego la repuesta permanente para resonancia será
( )t senC R
L I t s 00 .
.)( ω ν =
SiendoC R
L
., la impedancia máxima en resonancia y es resistiva.
La verdadera frecuencia de resonancia es β , pero para circuito con alto Q es0 β = .-
Para cualquier ω o sea fuera de resonancia, el primer término de la fórmula de Heaviside, queda:
st e sT E ).(. siendo ω j s =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 99/424
98
Zeq
C j L j RC j
L j R jT =
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++
+=∴
.
1...
.)(
ω ω ω
ω
Luego el primer término de la fórmula de Heaviside queda:
t sen
C j L j RC j
L j R I ..
.
1...
.0 ω
ω ω ω
ω
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎟ ⎠
⎞⎜⎝
⎛ ++
+=
[6]
Que representa la parte permanente de la repuesta.
En cuanto al segundo término es:
∑= −
n
i
t pie pi D s pi
pi N I
1
.0 .
)(').()(. Donde s = j.ω
Habíamos hallado al comienzo del ejemplo:
)(
)(
)..2.(
2)(
2
0
2 p D
p N
p pC
p pT =
+++
=ω α
α
Luegoα 2)( += p p N y ).2.()( 2
0
2 ω α ++= p pC p D ).(.2)(' α +=∴ pC p D
Hallaremos la sumatoria en los polos β α j p +−=1 y β α j p −−=2
=⎥⎦
⎤⎢⎣
⎡
+−−−−−−
+++−−+−
+∴
α β α ω β α
β α
α β α ω β α
β α
j j j
e j
j j j
e j
C
I t pt p
.(2).(
).(
).(2).(
).(.
210
[ ] [ ]⎥⎦
⎤⎢⎣
⎡
+−−−
−−+−
+=
)(..2
).(
)(..2
).(.
210
ω β α β
β α
ω β α β
β α
j j
e j
j j
e j
C
I t pt p
⎥⎦
⎤⎢⎣
⎡
+−−−
−+−
+=
−
)(
.
)(
.
.2.
21220
ω β α ω β α β
β α ϕ ϕ
j
ee
j
ee
jC
I t p jt p j
⎥⎦
⎤⎢⎣
⎡
+−−−
−+−+
=−−−−
)(
..
)(
..
.2.
....220
ω β α ω β α β
β α β α ϕ β α ϕ
j
eee
j
eee
jC
I t jt jt jt j
⎥⎥⎦⎤
⎢⎢⎣⎡
+−−−
−+−=
+−+−
)()(.2..
).().(.00
ω β jαe
ω β jαe
β jeω
C I
φt β jφt β jt α
[7]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 100/424
99
Por lo tanto, la repuesta es la compuesta por la suma de la expresión [6] que representa la parte
permanente de la repuesta y la expresión [7] que como vemos, tendrá una forma de onda
oscilatoria amortiguada, que tiende a cero con el tiempo, representando por lo tanto la parte
transitoria de la repuesta.
Escribiendo la expresión completa nos queda:
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++
+= t ω sen I
C ω j Lω j RC ω j
Lω j Rt sν .
.
1...
.)(. 0
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−−−
−+−+
+−+−
)()(.2
..
).().(.00
ω β jα
e
ω β jα
e
β j
eω
C
I φt β jφt β jt α
Excitaciones periódicas
Introducción
Veremos a continuación el análisis de algunos circuitos cuando son excitados por onda periódica
general.
Para ello recordemos la expresión de la transformada de la Laplace de una función periódica
general.-
Para una función periódica de periodo T o sea f(t) = f(t+T), la expresión de la transformada de
Laplace es:
dt et f e
p F T pt
pT .)(.
1
1)(
0∫ −
−−= [8]
Excitación periódica
La transformada de una excitación periódica puede hallarse mediante la transformada de primer
periodo y su desplazamiento.-Si e(t) es una excitación periódica cualquiera, de periodo T, la transformada del primer periodo es:
dt et e p E T pt .).()(
01 ∫ −= [9]
Luego la transformada para todo el periodo se obtiene desplazándola del primer periodo, es decir
aplicando la Ec. [8], tendremos:
pT
e
p E p E
−
−=
1
)()( 1 [10]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 101/424
100
dt et ee
p E T pt
pT .).(.
1
1)(
0∫ −
−−= [11]
La Ec. [11] es la expresión general de la transformada de una excitación periódica cualquiera,
obtenida a partir de la transformada del primer periodo.-
En esta expresión, el periodo T elegido puede comprender un ciclo o un número entero de ellos.-
Ejemplo 1: Sea una excitación en forma de tren de pulsos rectangulares.
Se desea hallar la transformada de dicha excitación.
El primer pulso puede expresarse, en función del tiempo, como combinación de dos funciones
escalón:
)(1 .)(.)( τ t μV t μV t e −−=
( )τ pτ p
e p
V p E
p
eV
pV p E −
−−=⇒−=∴ 1)(.
1.)( 11 [12]
Luego para calcular la transformada del tren de pulso se aplica la ecuación [10]
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−=
−
−
pT
τ p
e
e
p
V p E
1
1)( [13]
e(t)
T
τ
V
t
Fig.1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 102/424
101
Ejemplo 2: Sea un tren de ondas senoidales manipuladas de la Fig.3
Esta puede ser la onda de salida de un transmisor radiotelegráfico que consiste, en una onda
portadora de radio frecuencia, en este caso la senoide de la Fig. 2, que tiene su propia frecuencia
particular; esta onda portadora se interrumpe o manipula con pulsos rectangulares, de frecuencia
mucho menor, formando la sucesión de puntos y rayos que conforman el código radiotelegráfico,
resultando la onda de la Fig. 3 cuya expresión es:
[ ])()().()( at t t f t g −−= μ μ
La trasformada de Laplace que nos interesa es el de la función compuesta g(t).
Nótese que esta expresión es valida para el primer periodo que va de cero a T, pero como vemos
que es periódica, es necesario solo integrar la transformada de Laplace, sobre un periodo.-
Por lo tanto:
∫∫ −∞
−
−
−==
T pt
pt
pt dt et g e
dt et g pG00
.).(.1
1.).()( [14]
Si ahora reemplazamos en la ultima integral a la función g(t) por el valor que toma entre cero y T,
como vemos entre a y T la función g(t) es nula, por lo tanto tomamos los limites entre cero y a y
vemos que en este intervalo es g(t) = f(t).-Luego:
∫ −
−−=
a pt
pT dt et f
e pG
0.).(
1
1.)( [14’]
Si la función original f(t) no hubiera sido pulsada, podríamos haber escrito su transformada,
empleando el teorema de periodicidad de a Ec. [8]
∫
−
−
−=
a pt
pa dt et f
e
p F 0
.).(
1
1.)( [15]
Esta expresión es valida suponiendo que en a entra un número entero de ciclos.
Senωt
Fig.2
f (t)g(t) f (t)
Fig.3
tt
a
T

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 103/424
102
Despejando de la Ec. [15], la integral, nos queda:
( )∫ −− −=
a pa pt p F edt et f 0
)(.1.).(
Y reemplazando esta integral en [14’] nos queda:
( ) )(.1.1
1)( p F e
e pG
pa
pT
−
− −
−=
Como f(t) = sen ωt, entonces22
)( p
p F +
=ω
Luego la expresión de la transformada de Laplace.
Del tren de ondas manipulada g(t), nos queda.
( )( ) 22.11)( ω +−−== −
−
pee pG pT
pa
Como vemos hemos hallado la transformada de la onda manipulada conociendo la transformada
de la portadora y obviando la resolución de la integral del último término de la Ec. [14].
Veremos a continuación otra aplicación de las propiedades de los sistemas excitados con onda
periódica.-
Sistemas excitados por ondas periódicas no sinusoidales en régimen permanente
La transformada de Laplace es útil en el análisis de sistema excitado por ondas periódicas no
sinusoidales, cuando interesa hallar la repuesta permanente.
La otra forma de determinar la repuesta permanente es por medio de un desarrollo en serie de
Fourier.
Habíamos visto en la fórmula de Heaviside que la repuesta total de un sistema excitado (en este
caso por una función periódica) es la suma de la repuesta permanente más el transitorio.-
T(p)
⎩⎨⎧
=
=+=
atransitorirespt r
permanenterespt r t r t r t r
t
p
t p.)(
.)()()()(e(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 104/424
103
O sea podemos escribir.
)()()( t r t r t r t p
+= [16]
Si ahora a ese sistema lo excitamos con el primer periodo de la función excitación tendremos:
)()()( 111 t r t r t r t p += [17]
Pero por ser periódica y de periodo T (la excitación), la repuesta permanente y la transitoria.
Es la misma para todos los periodos.
O sea:)()(1 t r t r p p = y )()(
1 t r t r t t =
Luego de la Ec. [17] nos queda:
)()()(1 t r t r t r t p += [18]
Por lo tanto, obtenemos la repuesta permanente total, como diferencia entre la repuesta al primer
periodo y la repuesta transitoria.
O sea:)()()( 1 t r t r t r t p −= [19]
En general )(1 t r se halla mediante la formula
[20])(1)(1 .)(
p p E T t r -1-L= Para el primer periodo )0( T t ≤≤ y )(t r
t se halla según
)()( .)( p pt
E T t r 1--L= [21]
Esta calculada como residuos en los polos de T(p).
Luego se determina la )(t r p
con Ec. [19].
Este procedimiento no es aplicable a sistema ideales o sea que tengan elemento no disipativos.
Esto se debe a que como vimos, exciten una restricción de polos sobre el eje jω, para latransferencia T(t).
Pero esta restricción no rige para un sistema real, ya que siempre un sistema real será disipativo.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 105/424
104
Ejemplo: Hallar la repuesta permanente de un circuito pasa altos al tren de pulsos rectangulares
de la Fig.1
Se define como respuesta, a la tensión sobre la resistencia R.
Por lo tanto la transferencia será:
)(
)(
)(
)()(
p E
p E
p E
p R pT
e
s p==
Luego R p I p E s ).()( = peroC p R
p E p I e
./1
)()(
+=
C p R
R p Ee p Es R
C p R
p Ee p Es
./1).()(.
./1
)()(
+=⇒
+=∴
De donde:
α +=⇒
+=
+=
+=
p
p pT
C R p
p
RC p
RC p
C p R
R pT )(
./11..
..
./1)(
DondeC R.
1=α
Por otra parte la transformada de la excitación del primer periodo esta dada por la Ec. [12]
( )τ pe p
V p E −−= 1)(1
y la transformada de la excitación para la serie periódica de pulsos esta dada por la Ec. [13]
⎟ ⎠
⎞⎜⎝
⎛ −−
=−
−
pT
p
e
e
p
V p E
1
1)(
τ
Calcularemos )()().()( 111 p R p E pT pν 1--1-- LL ==
Donde:
( ) ( )τ pτ p eα p
V e
p
V
α p
p p E pT p R −− −
+=−
+== 1.1..)().()( 11
i(t)e(t)
C
R
r p(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 106/424
105
Luego:τ pe
α p
V
α p
V p R −
+−
+= .)(1
Cuya antitransformada es directa:
).(..)(..)( )(1 τ t μeV t μeV t ν τ t αt α −−= −−− Valido para 0≤ t ≤ T
Ahora calcularemos )(t vt
)()().()( pt R p E pT t t ν 1--1-- LL == En los polos de T(p).
( ) ( ) pT
τ p
pT
τ p
e
e
α pe p
eV
α p
p p E pT pt R
−
−
−
−
−
−+
=−
−+
==1
1.
1
1.
1..)().()(
Para hallar )(t t v hallaremos el residuo de esta expresión en p = -α (Polo de T (p))
( ))(.
1
1.)( . t μe
e
eV t t v t α
T α
ατ −
−
−
−
−=
Luego con estas dos expresiones aplicamos la Ec. [19].
(
( )
)(.1
1.)(..)(..)( .).(. t μe
e
eV τ t μeV t μeV t v t α
T α
ατ τ t αt α
p−
−
−−−−
−
−−−−=
)(..)(.1
11..)( ).(. τ t μeV t μ
e
eeV t v τ t α
T α
ατ t α
p −−⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
−
−−= −−
−
−−
Cuya representación gráfica normalizada es la siguiente:
T e
e
.1
.11
α
τ α
−−
−−−
V
t pv )(
A
T
τ
D

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 107/424
106
Se cumple siempre que el salto sobre la resistencia R, es igual a la tensión aplicada V.
Por ello debe verificarse que el salto al final del periodo sea uno, ó sea: A + D = 1
Si en el caso anterior se hubiera querido hallar la repuesta total mediante la forma clásica del
cálculo de los residuos, se llegaría a una serie infinita.
En efecto:
( )( )( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+−
−∑=+=
−
−
α pe
eeV resid t νt pνt v
pT
pt τ p
t .1
.1..)()()(
En todos los polos
Polo de T(p) , en p = -α, cuyo residuo ya hemos calculado.
Y en los polos de la excitación y que son los valores de p que hacen
01 =− − pT e
En este caso hay infinitos polos, representando las infinitas armónicas de la onda general.
La sumatoria de residuos, se convierte así en una serie infinita y el uso de la trasformada no nos
trae ventaja sobre el uso de la serie de Fourier.
Sin embargo es evidente la conveniencia del método de la transformada de Laplce, cuando sólo
se quiere hallar la repuesta permanente a excitaciones periódicas no sinusoidales por medio de la
repuesta al primer periodo.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 108/424
107
DETERMINACIÓN DE LA RESPUESTA DE UN CIRCUITO, A UNA FUNCIÓN
CUALQUIERA, CONOCIDA LA RESPUESTA DEL MISMO A LA FUNCIÓN
IMPULSO O A LA FUNCIÓN ESCALÓN / CONVOLUCIÓN
Habíamos visto que la transformada de Laplace de la función impulso valía la unidad
1)( =t δ-L
Además habíamos visto que:
)().()( p E pT p R =
Por lo tanto si a un sistema lo excitamos con la función impulso )(t δ tendremos:
)()( t δt e = y transformando 1)()( == t δ p E L
→==∴ 1).()().()( pT p E pT p Rδ )()( pT p Rδ =
O sea la transformada de la repuesta a la función impulso del sistema es igual a la transformada
de la función transferencia.
De lo anterior se deduce que si se conoce, en un sistema dado, la repuesta a la función impulso,
podríamos hallar la repuesta a una excitación [e(t)] cualquiera.Veamos el caso en que a un sistema se le excita con una función e (t) cualquiera, pero cuya
expresión analítica se conoce, y deseamos hallar la repuesta )(t v a esa excitación, conociendo la
repuesta a la función impulso )(t δv .
El procedimiento es el siguiente:
1) Se calcula la transformada de repuesta al impulso, )(t δv , obteniéndose así por lo ya visto, la
transformada de la función transferencia T(p)
2) Se calcula la transformada de la función excitación, e (t), obteniéndose E (p)
3) Multiplicamos E (p) por T (p) y obtenemos la Transformada de la repuesta deseada R (p).
4) Se calcula la transformada inversa de R (p) y obtenemos la repuesta )(t v deseada.
Pero este método no es aplicable si la función excitación esta dada en forma grafica, o no posea
trasformada de Laplace.
En este caso se aplican las formulas derivadas del Teorema de Convolución.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 109/424
108
Obtención de la respuesta temporal por Convolución
Introducción: Como ya se vio, si un sistema es excitado cuya expresión analítica es conocida y
es transformable, se puede conocer la repuesta temporal, (aún desconociendo la T(p) ),a través de
la repuesta conocida a la función impulso, siguiendo el procedimiento del párrafo anterior
Se verá ahora a través de Teorema de Convolución, que si la función excitación no es
transformable o está dada en forma grafica, también se puede obtener la repuesta temporal, en
función de la repuesta al impulso o al escalón unitario.
Demás esta decir que el producto de Convolución es aplicable también cuando se conoce la
expresión analítica de la excitación.-
Producto de Convolución:
Dada dos funciones f 1 (t) y f 2 (t), se denomina producto de composición, producto de Convolucióno simplemente Convolución f 1 (t) . f 2 (t), al resultado de la siguiente integral:
∫ −=• t
d f t f t f t f 0 2121 )().()()( τ τ τ [22]
Se verán alguna propiedades; haciendo el cambio de variable
ut ut −=∴=− τ τ y dud −=τ
Corrigiendo los límites de integración resulta:
=−=• ∫t
d f t f t f t f 0 2121 )().()()( τ τ τ
)()()().())(().( 120 12
0
21 t f t f duu f ut f duut f u f t
t •=−=−−= ∫∫ [23]
Esto es:)()()()( 1221 t f t f t f t f •=• [24]
De [23] y [24] podemos escribir la formula conocida de Convolución
∫∫ −=−=• t t
d t f f d f t f t f t f 0 210 2121 ).().()().()()( τ τ τ τ τ τ [25]
Además, por linealidad se cumple que:
[ ])()(.)(.)(. 2121 t f t f B At f Bt f A •=• [26]
En la Fig.4, puede verse la interpretación grafica del producto de Convolución:
en a) se muestra la función )(1
τ f ,
en b) )(1 τ − f

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 110/424
109
y en c) )(1 τ −t f
En d) se ha representado )(2 τ f
y en e) se incluyen, )(1 τ −t f , )(2 τ f y el producto de ambos.
El área encerrada por la función )(1 τ −t f . )(2 τ f entre 0 y t, es el valor del producto de
Convolución •)(1 t f )(2 t f .
Para cada t considerada se obtiene un área, como se muestra en la Fig.5.
Representando los valores Si de las áreas, en función de los tiempo ti correspondiente, se obtiene
la función •)(1 t f )(2 t f , como se aprecia en Fig.5f
Teorema de Convolucion:
Sean dos funciones )(1 t f y )(2 t f , cuyas transformadas de Laplace son F1(p) y F2(p).El teorema de convolucion, o de Borel (cuya demostración no es tema de esta materia), afirma
que si las integrales de Laplace F1 (p) y F2 (p) son absolutamente convergente en p =p0, entonces
también es absolutamente convergente en p0 la integral del producto de convolucion dada por la
Ec. [22] y se verifica que:
[ ] )()(..)().()().( 210 2121 t f t f dt et f t f p F p F pt •== −∞
∫ L [27]
Escrita en forma completa la fórmula del teorema de convolucion nos dice:
∫∫ −=−= t t
d f t f d t f f p F p F 0 210 2121 )().()().()().( τ τ τ τ τ τ LL [28]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 111/424
110
)(1 τ f )(2 τ f
)(1 τ − f
)().( 21 τ τ f t f −
)(2 τ f
)(1 τ −t f
)().( 21 τ τ f t f −
)().( 21 τ τ f t f −
1t t =
)(2 τ f
)()()().( 210 21 t f t f d f t f Area t
•=−= ∫ τ τ τ
B
d)
A
a)
τ
τ
τ
τ
τ
τ τ
τ τ
τ
b)
c)
a)
b)
c)
A
A
Fig.4t
Fig.5
B
A
A.B
A
B
)( 11 τ −t f
0=t
)(2 τ f
)().( 21 τ τ f t f −
)( 21 τ −t f
A.B
)(2 τ f
2t t =
A.B
A
B
)().( 21 τ τ f t f −
)(2 τ f
d)
e)
f)
)( 31 τ t f −
B
A.B
3t t =
)( 14 τ −t f
A.B
A
B )(2 τ f
)().( 21 τ τ f t f −
4t t =
)()( 21 t f t f •
0 t1 t2 t3 t4
s1 s2 s3 s4
)(1 τ − f
)( 11 τ −t f
e)
t
Área = S1
Área = S2
Área = S3
Área S4
Área = 0 S0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 112/424
111
Antitranformación empleando el Teorema de Convolución
Cuando se debe antitranformar una expresión que puede descomponerse en el producto de dos
funciones cuyas transformadas inversas son conocidas, el Teorema de Convolución permite
resolver el problema ventajosamente.
Ejemplo 1: Antitranformar la repuesta frecuencial.
)).(()(
21
0
p p p p
A p R
−−=
Esta expresión puede escribirse:
)().()( 21 p F p F p R =
Donde:
)()(
1
01
p p
A p F −
= y)(
1)(2
2 p p
p F −
=
Cuyas antitranformadas son:
)(..)()( 1011 t e A p F t F
t p== 1-..L
)(.)()( 222 t μe p F t F t p== 1-..L
De acuerdo a la Ec. [27], puede escribirse:
)()()().()()( 2121 t r p R p F p F t F t F ===• 1-..1-.. LL
Donde, según la Ec. [25] es:
∫ −=•= t
d f t f t f t f t r 0 2121 )().()()()( τ τ τ
Luego reemplazando en esta última expresión, los valores de )(1 t f y )(2 t f hallados:
( )∫= −t τ pτ t p τ d ee At r 0 0 21 ..)( Valida para t > 0
( ) ( ) t
τ p pt pt τ p pt pt τ pτ pt p
p p
ee Aτ d ee Aτ d eee At r
012
.
00.
00012
1121211 ....)(⎥⎥⎦
⎤
⎢⎢⎣
⎡
−=∫=∫=∴
−−−
Resultando finalmente:
( ) ( )t μee p p
At r
t pt p ..)( 12
12
0 −−
=∴

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 113/424
112
Obtención por Convolución de la repuesta temporal a partir de la repuesta al impulso
Habíamos visto que:
)()( pT p R =δ
Y además:
)()()().( t r p R p E pT L==
Por lo tanto haciendo las siguientes relaciones con respecto a la fórmula de Convolución, y en la
que denominamos
a )()()()()( 11 t r t f p R pT p F δδ =∴=→
)()()()( 22 t et f p E p F =∴→
Luego aplicando la Ec. [28] tendremos:
∫ −==== t
d t f f t r p R p E pT p F p F 0 2121 )().()()()().()().( τ τ τ LL
Y finalmente.
∫∫ −=−= t t
d et r d t er t r 00
)().()().()( τ τ τ τ τ τ δ δ
[29]
La Ec. [29] indica que la repuesta temporal a una excitación arbitraria es igual al producto de
Convolucion de la repuesta al pulso, por la excitación expresada en el dominio del tiempo.Dicho de otro modo, si se conoce la repuesta temporal al impulso unitario ya sea en forma
analítica o experimental, se puede determinar la repuesta a cualquier excitación.
Gracia a este resultado, es posible hallar la repuesta a una excitación que no posea transformada
de Laplace o que no esta dada en forma gráfica (medible a través de un osciloscopio)
Se adopta para la resolución, la primera o la segunda expresión de la Ec. [29], según cual sea la
función más fácil de trasladar.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 114/424
113
Ejemplo 1: Hallar la repuesta del circuito RC serie, a una excitación tipo escalón V, por
aplicación del teorema de convolución.
Definimos como repuesta a la tensión Vc(t) sobre el capacitor.
)()(.)( t et V t ve == [30]
Sabemos que:
)(
)(
)(
)()(
pVe
pVc
p E
p R pT ==
Pero
C p p I pVc
.
1).()( = Siendo
C p R
pVe p I
.
1)(
)(+
=
C R pC R pVe
pVc
RC p pVe
C p
C p R
pVe pVc
.
11
..
1
)(
)(
1..
1).(
.
1.
.
1)(
)(
+
=∴+
=
+
=∴
Luego:
⎟ ⎠ ⎞
⎜⎝ ⎛ +
=
C R p
C R pT
.
11
..
1)(
Pero.
( )⎭
⎬⎫
⎩⎨⎧
+==∴=
C R pC R pT t r p R pT
./1
1.
.
1)()()()( 1..-1..- LL
δ δ
Luego.)(.
.
1)( ./ t e
C Rt r
C Rt μ δ
−= [31]
Aplicando la formula de convolucion Ec. [29], para la )(t r δ desplazada, resulta [32]
∫∫∫ −
⎟ ⎠
⎞⎜⎝
⎛ −−
==−=•= t C RC Rt t
C R
t
t
c d ee
C R
V d V
C R
ed t et r t et r t v
0
././
0
.
0.
..)().()()()( τ τ τ τ τ
τ
δ δ
[ ] [ ]1.....
...
)( ././0
././
0
././ −=== −−− ∫ C Rt C Rt t C RC Rt t C RC Rt
c eeV eC ReC R
V d eeC R
V t v τ τ τ
i(tv e(t)
C v C(t)R

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 115/424
114
Finalmente:( ) )(.1.)( ./
t eV t v C Rt
c
−−= [33]
Ejemplo 2: Resolver el mismo problema anterior en forma gráfica, suponiendo que la repuesta al
impulso dada por la Ec. [31], ha sido obtenida experimentalmente, mediante un osciloscopio ytiene la forma indicada en la figura 4-d).
La excitación dada por la Ec. [30], esta representada en la Fig. 4- a)
Teniendo en cuenta la segunda igualdad de la Ec. [28], la Ec. [32] se puede escribir.
∫ −=•= t
c d r t et r t et v
0)().()()()( τ τ τ
δ δ [34]
En la Fig.5, se ha denominado )(1 τ −t f a )(1 τ −t e y )(2 τ f a )(τ δ
r y se ha resuelto en forma
gráfica la Ec. [34], dando como resultado la curva de carga del capacitor mostrada en la Fig. 5-f),que corresponde a la solución )(t vc
hallada en el ejemplo anterior.
El cambio de denominación de las funciones sólo tiene por finalidad el poder utilizar la misma
gráficas de la Fig. 4 y 5.-
Ejemplo 3: Hallar la repuesta del circuito RL serie de la figura, a una excitación del tipo
cosenoidal, por aplicación del Teorema de Convolución.
Definimos como repuesta a la corriente i(t) que circula por el circuito.
t ωV t e cos.)( =
Llamamos:
L p R p Z .)( += , además )().()(
)()( pY p E
p Z
p E p I ==
Pero:
)/(
1.
1
.
1)()()().()().()()(
L R p L L p R pY pT p E pY p E pT p R p I
+=
+==∴===
Pero:
)(.1
)/(
1.
1)()()()(
)/(
t e LC R p L pY t r p R pT t L R
μ δ δ
−
=⎭⎬⎫
⎩⎨⎧
+==∴= 1-..1-..
LL
i(t)e(t) L
R

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 116/424
115
)(.1
)( )/(t e
Lt r t L R μ
δ
−=∴
Ahora indicamos la función excitación cosenoidal como parte real de:
t jeV t e ω .Re)( = y la escribimos t jeV t e ω .)( = , luego hallamos la parte real Re
Aplicando la formula de convolución (Ec. [29]), para la e(t) desplazado, será:
τ d ee L
V τ d τ t eτ r t r τ t ω jt
τ L
R
t δ
)(00 .)().()( −−−
∫=∫ −=
τ τ τ τ ω
ω ωτ τ
ω ωτ ω τ
d ee L
V d eee
L
V d eee
L
V t r
t L
R j
t j jt L
R
t j jt jt L
R
......)(0
)(
00 ∫∫∫ +−
−− ===
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡−
+−=
=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡−
+−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+−=
−−
+−+−
t L
R
t ω jt ω j
t L
Rω jt ω j
t τ
L
Rω j
t ω j
ee Lω j R
eV
e R Lω j
eV
L
Rω j
ee
L
V t r
.1.
1.
)(.)(
)(
0
)(
[ ] t L Rt ω jt L Rt ω j
e Lω j R
V
e Lω j R
V
t r ee Lω j R
V
t r
)/()/(
..)(..)( −−
+−+=⇒−=
Finalmente la repuesta, es la parte real de esta ultima expresión.
Por lo tanto hallaremos la parte real de:
t L Rt ω j e Lω j R
V e
Lω j R
V )/(.. −
+−
+
Tomaremos el primer miembro:
( ) =−++
=+−=
+ φ jsenφ Lω R
Lω R
eV e
Lω R
Lω j RV e
Lω j R
V t ω j Lω jt ω j cos.)(.)(
..)(
)(. 222222
Donde ⎟ ⎠
⎞⎜⎝
⎛ = R
Lωtg arcφ
..
( ) ( )( ) =+−+
=−+
= t ω jsent ωφ jsenφ
Lω R
V eφ jsenφ
Lω R
V t ω j cos.cos.)(
.cos.)( 2222
( ) =+−++
= t ω senφ sent ωφ jsenφt ω jsent ωφ
Lω R
V .cos.cos.cos.cos.)( 22

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 117/424
116
Dejando nada mas que la parte real de esta expresión
( ) )cos(.)(
.cos.cos.)( 2222
φt ω
Lω R
V t ω senφ sent ωφ
Lω R
V −
+=+
+=
Que es la primera parte de la repuesta y representa el régimen permanente.
Trabajaremos ahora con el segundo término:
).(cos)()(
.)(
)(
.. 22
22
)/(
22
)/()/( φ jsenφwL R
Lω R
eV Lω j R
Lω R
eV e
Lω j R
V t L Rt L Rt L R −+
+=−
+=
+
−−−
Tomando la parte real de la última expresión:
φ
Lω R
eV t L R
cos.)(
.22
)/(
+=
−
Que es el segundo término de la repuesta y que la exponencial nos está hablando de un
amortiguamiento que tiende a cero con el tiempo, representando por tanto, el régimen transitorio.
Luego, la expresión total de la repuesta, será:
φ Lω R
eV
φt ω Lω R
V
t r
t L R
cos.)(
.
).(cos)()( 22
)/(
22 +−−+=
−

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 118/424
117
Obtención de la repuesta temporal en base a la repuesta al escalón. Integrales de Duhamel
Sea un sistema con condiciones iniciales nulas, caracterizado por una función operacional T(p) ,
que no posee polos en el infinito.
Si se lo excita con una señal e(t), que no incluya impulsos y sea transformable por Laplace,
puede escribirse:
)().()( p E pT p R = [35]
Además sabíamos que la transformada de la función escalón unitario valía.
p
t 1
)( =μ .L
Además por la Ec. [35]
)(.)(1
).()( p R p pT
p
pT p Rμ
μ =⇒=
Introduciendo ésta última expresión en la Ec. [35] tendremos.
)().(.)( p E p R p p R μ= [36]
Vemos si se conoce la repuesta)(t
r μ
y además la expresión analítica de la excitación, habrá un
procedimiento (similar el de la Fig.16) para obtener la repuesta)(t
r a esa excitación.
Continuando con la Ec. [36], la podemos escribir:
)(.)( p F p p R = [37]
Siendo:)().()( p E p R p F = [38]
Antitransformando la Ec. [38], en base al Teorema de Comvolución, resulta:
)()()().( t et r p E p R μ μ •== .1-..Lf(t) [39]
Desarrollando el producto de Convolución según la Ec. [22] queda:
∫ −= t μ τ d τ eτ t r t f 0 )().()( [40]
Y de acuerdo a la Ec. [23]
∫ −= t μ τ d τ r τ t et f 0 )().()( [41]
Las Ecs. [40] y [41], muestran que para 0≥t es 0)0( = f , pues )(t e no posee impulsos por
hipótesis y )(t μr tampoco, por no tener polos en el infinito la función T(p).
Antitransformando la Ec. [37], se tiene:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 119/424
118
)0()0()(.)(.)()( f f p F p p F p p Rt r +−=== .1-...1-...1-.. LLL
)0()0()(. f f p F p.1-...1-.. LL +−=
)().0()(.)( t δ f t f dt
d t r +=∴ [42]
Según se vio 0)0( = f
En consecuencia, reemplazando en la Ec. [42] a f (t) por sus expresiones dadas por la Ecs. [40] y
[41], resulta.
∫ −= t μ τ d τ eτ t r
dt
d t r 0 )().()( [43]
∫ −= t
μ τ d τ r τ t edt
d t r 0 ).().()( [44]
y aplicando a las Ecs. [43] y [44] la fórmula [45] para la derivación bajo el signo integral,
cuando los límites son función del parámetro, se tiene: (ver la regla de Leibnitz, Pág.95 de la
serie Schaum)
∫∂∂
+∂
∂∫ −
∂∂
= )(2)(1
)(2)(1
),().;().;(),( 11
22
t
t
t
t
φφ
φφ
dt t τ F t t
φt φ F
t
φt φ F dt t τ F
dt
d [45]
Donde 0)(1
=t φ ; t t φ =)(2
y)().();( τ τ τ μ et r t F −= ó
)().();( τ τ τ μ
r t et F −=
De esto resulta.
∫ −+= t μ μ τ d τ eτ t r t er t r 0 )().(')().0()( [46]
∫ −+= t μ μ τ d τ r τ t et r et r 0 ).().(')().0()( [47]
Donde )(' τ t r μ − y )(' τ t e − son las derivadas respecto del tiempo de )( τ t r μ − y )( τ −t e ,
respectivamente.-
Teniendo en cuenta la Ec. [23], las Ecs. [46] y [47] pueden escribirse:
∫ −+= t d t er t er t r 0 )().(')().0()( τ τ τ μ μ [48]
∫ −+= t
d t r et r et r 0
).().(')().0()( τ τ τ μ μ [49]
Las Ecs. [46], [47], [48] y [49], se conocen como integrales de Duhamel, integrales de Carson o
integrales de superposición de Boltzman-Hopkinson.
Se utiliza lo que resulte de más fácil aplicación para el problema dado.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 120/424
119
Las Ecs. [46] y [48] exigen que )(t r μ sea diferenciable, mientras que las Ecs. [47] y [49] que e(t)
sea derivable. Las Ecs. [46] y [48] solo son aplicables si )0(μ r es finito y las Ecs. [47] y [49]
requieren que lo sea e(0), como se impuso en las hipótesis iniciales
Ejemplo 4: Hallar la repuesta del circuito de la Fig., cuando se la excita con una función
)(..)( t t Ta
VaV t e μ ⎟
⎠ ⎞
⎜⎝ ⎛ += , sabiendo que las condiciones iniciales son nulas y aplicando las fórmulas
de las integrales de Duhamel.
Definimos como repuesta a la tensión Vc (t) sobre el capacitor
)(..)( t t Ta
VaV t e μ ⎟
⎠ ⎞
⎜⎝ ⎛ +=
La función transferencia (calculada en el ejemplo 1) vale:
⎟ ⎠ ⎞
⎜⎝ ⎛ +
==
C R p
C R p E
pVc pT
.
11
..
1
)(
)()(
La repuesta transformada del escalón unitario es:
C R p
C p B
p
A
C R p p
C R p p
C R p
pT p R
./1
.
.
1
1
.
1
1.
.
1)()(
++
+=
⎟ ⎠ ⎞
⎜⎝ ⎛ +
⇒
⎟ ⎠ ⎞
⎜⎝ ⎛ +
==μ
Antitransformando
1.
.).(1...
1. 22 =+++⇒=++⎟
⎠ ⎞
⎜⎝ ⎛ +
C R
A p BC A pC p p B
C R p A
De donde0;0 =+= C A B Y C RC C R A .. −=∴=
C R p pC R pC R
pC R
C R p R
./111
./1..
.1)(
+−=⎟
⎠ ⎞⎜
⎝ ⎛
+−=∴ μ
e(t) C v c(t)
R

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 121/424
120
De tablas( ) )(.1)( ./ t et r C Rt μ μ
−−=
Aplicando la formula de las integrales de Duhamel Ec. [47] se obtiene:
∫ −+== t
d r t et r et vt c
v0
).().(')().0()()( τ τ μ
τ μ
( ) ( ) τ μ μ τ d et Ta
Vat eV t v C Rt C Rt
c .1).(.)(1.)( ./
0
./ −− −+−=∴ ∫
Resolviendo la integral queda:
( )
t
C RC Rt
c
C R
et
Ta
Vat t
Ta
Vat eV t v
0
././
.
1).(.)(..)(1.)(
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎟
⎠
⎞⎜
⎝
⎛ −++−=
−−
τ
μ μ μ
Resultando finalmente:
( ) )(....)..(1.)( ././t eC R
Ta
VaC Rt
Ta
VaeV t v C Rt C Rt
c μ ⎥⎦⎤
⎢⎣⎡ +−+−= −− [50]
Nótese que el primer término es la repuesta al escalón de amplitud V, el segundo, la componente
forzada de la repuesta a la rampa de pendienteTa
Va y el tercero la componente libre de la repuesta
a la rampa mencionada.-
Si en lugar de emplear la Ec. [47] se utiliza otra de las integrales de Duhamel, por ejemplo la Ec.
[48], se llega al mismo resultado de la Ec. [50] pero en forma más laborioso.
Sin embargo, pueden presentarse problemas más complejos en los que algunos de las integrales
de Duhamel sean aplicables y otras no, por no ser derivable la excitación o no ser finito el valor
inicial de )(t r μ ó )(t e

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 122/424
121
Obtención de las integrales de Duhamel a partir del principio de superposición.
Consideremos un circuito lineal, invariante en el tiempo y con condiciones iniciales nulas, al que
se le aplica una excitación e(t) como la mostrada en la Fig.6, que posee una sola discontinuidad
de primera especie para t = 0.
La excitación puede ser expresada como una suma de escalones, cada uno de los cuales esta
demorado respecto del anterior en un pequeño intervalo de tiempo τ Δ .-
Esto es:
)(...
..)(.....)2(.)(.)().0()( 21
τ μ
τ μ τ μ τ μ μ
Δ−Δ
+Δ−Δ++Δ−Δ+Δ−Δ+=
ut e
it et et et et e
n
i
Que puede escribirse:
∑=
Δ−Δ+= n
ii it et et e
1
)(.)().0()( τ μ μ [51]
Si la repuesta del circuito al escalón unitario es )(t r μ , la repuesta al escalón genérico:
)(. τ μ Δ−Δ it eiresulta, por ser el circuito lineal e invariante con el tiempo:
)(.)(. τ μ μ Δ−Δ= it r et r ii
De modo que la repuesta a la excitación dada por la Ec. [51] puede expresare en base al principio
de superposición:
∑=
Δ−Δ+= n
ii it r et r et r
1
)(.)().0()( τ μ μ
Si τ Δ es pequeño, puede escribirse:
τ τ
Δ⎟ ⎠ ⎞⎜
⎝ ⎛
ΔΔ=Δ .i
iee
Fig.6
τ
e(t)
e(t)
τ Δ τ Δ2 τ Δi τ Δn
1eΔ 2eΔ
enΔ
ieΔ
e(0)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 123/424
122
Resultando:
τ τ τ
μ μ ΔΔ−⎟ ⎠
⎞⎜⎝
⎛ Δ
Δ+= ∑
=
)(.)().0()(1
it r e
t r et r n
i
i
Y en el límite, cuando 0→Δτ y por lo tanto ∞→n , queda:
τ τ τ
μ τ μ ΔΔ−⎟ ⎠
⎞⎜⎝
⎛ Δ
Δ+= ∑
=∞→→Δ )(.lim)().0()(
10 it r
et r et r
n
i
i
n
Donde)(' τ
τ e
ei →⎟ ⎠ ⎞
⎜⎝ ⎛
ΔΔ para 0=Δτ
Finalmente queda:
τ τ τ μ μ d t r et r et r
t
)(.)(')().0()( 0 −+= ∫ [52]
Que coincide con la forma de la integral de Duhamel dada por la Ec. [49]
Operando sobre la Ec. [52] se pueden hallar las Ecs. [46], [47] y [48]
En forma análoga puede hallarse la integral de convolución por superposición, caracterizando a
la excitación como una suma de impulsos desplazados.-
Ejemplo 5: Hallaremos la repuesta de un amplificador colector común de dos etapas, con
acoplamiento RC, cuando se lo excita con la función escalón.
Suponemos:a) Las dos etapas son iguales
b) El análisis valdrá para escalones de duración t < C.r b.
Como vemos la tensión de entrada a la segunda etapa es en este caso la repuesta al escalón )(t r μ
de la primera.
+v1(t)=µ(t)
v2(t)
R e
c b
e
-Ee
R b
⇒ A 2ª Etapa
C

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 124/424
123
Por lo tanto primeros calcularemos la repuesta al escalón de la primera etapa.
Para ello dibujamos el circuito equivalente de audio frecuencia:
Dibujamos el circuito ya transformado.
Reduciendo el circuito, nos queda:
a) Cálculo de V2(p) del circuito 1.
Consideremos la reducción de ge y Ge que están en serie, en un solo resistor de conductancia:
ee
ee
ee G g
G g
Rr G
+=
+=
1 [1]
La ecuación en el nodo 2 será:
(g b + G + gc).U2 – g bE1(p) = -α.Ie = -α(-G.U2) [2]
)1.()(. 12
αG g g p E g U
bc
b
−++=∴
La corriente Ie será entonces:
)1.(
)(... 1
2αG g g
p E g g U G I
cb
be −++
−=−=
I(p) )( p R μ
pC .1
r b +
V2(p)
Circuito 2
p p E
1)(1 = Ge r b
C
)( p μ R
V2(p)
gc
ge
Ie e b
αIeG
g b
Circuito 1
2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 125/424
124
El voltaje de salida está dado por:
=−
+
++
+=
−++=−= )(.
)1.(111
1.
)1.(
)(....)( 1
12 p E
α
Rr r r
r Rr
R
αG g g
p E g G R I R pV
eecb
bee
e
cb
beee
)(.)1.(.).().(
.1 p E
αr r Rr r Rr r
r R
cbeebeec
ce
−++++=
Como simplificaciones prácticas, consideramos que r c>> r e, r b, R e, nos queda:
)(.)1.(
)( 12 p E αr Rr
R pV
bee
e
−++=
Reemplazando E1(p) por su expresión, nos queda:
pαr Rr
R pV
bee
e 1.
)1.()(2 −++
= [3]
Ahora con esta expresión de V2(p), resolvemos el circuito 2:
( ) ⎟⎟
⎟⎟⎟
⎠
⎞
⎜⎜
⎜⎜⎜
⎝
⎛
⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ +⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−++
−=
+
−++−=
+
−=
b
bebeb
e
b
bee
e
br C
pαr Rr r r
R
r pC
pαr Rr
R
r pC
pV p I
.1
1.
)1.(1
1.
)1.(
1
)()(
22
La )( p R μ que buscamos es b μ r p I p R ).()( =
( )=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−++−=∴
C r p
αr Rr r r
Rr p R
b
bebeb
eb μ
.
1
1.
)1.(.)(
2
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
−=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −++
−=
C r p
R
C r p
αr Rr
R
b
eq
b
bee
e
11
1.
)1.(
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
−=∴
C r p
R p R
b
eq μ
1)(

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 126/424
125
Antitransformando, obtenemos la repuesta en el tiempo a la excitación al escalón, de la primeraetapa
C br t e Rt μr eq
./.)(1
−−=
Poniendot β
e At μr ..)(1
−−=
Luego la excitación de la segunda etapa es:
t β e At e ..)( −=
Aplicando la fórmula [47] de Duhamel.
τ d τ t eτ μr t μr et r t
)('.)()().()( 00 −∫+=
Y teniendo en cuenta que la )(t r μ de la segunda etapa es igual a la de la primera, tenemos:
( τ d eα Ae Ae A At r τ t β t τ β t β μ .....).).(()( )(
0..
2 −−−−
∫ −+−−=
).(..2..2..0
...2.2)(2 t t β
e β At β
e Aτ d τ β
et τ β e
t β e β A
t β e At μr
−−−=∫ −−−−=∴
( )t β e At r t β μ .1..)( .2
2 −=∴ −
En la figura siguiente, se comparan las respuestas de un amplificador de una etapa y otro de dos
etapas, ambos con tensión total normalizada.
Se debe tener en cuenta dos cosas
1º etapa
2º etapa
t
t =r b.C
1
)(.1
2 t r R
μeq

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 127/424
126
1) La tensión normalizada para dos etapas: es:
)(.1
2
2
t r R
μeq
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
Tensión normalizada para una etapa es:
)(.1
2 t r R
μeq
2) Las curvas no deben usarse para valores mayores de C r t b.= en razón de la condición b).-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 128/424
127
RESOLUCIÓN DE CIRCUITOS POR APLICACIÓN DE LA SERIE O INTEGRAL DE
FOURIER
Introducción
La aplicación más importante de la serie de Fourier para los circuitos, es el cálculo de los
espectros de frecuencia de ondas periódicas o no periódicas, pero no sinusoidales.-
Estas ondas se aplican como excitación, a un circuito cuya función transferencia es en general,
función de la frecuencia y se escribe como T(jω), cuyo modulo y fase son funciones de ω y puede
escribirse:
)(.)()( ωφ jeωT ω jT
−= [53]
El signo de φ se toma negativo por convención.
Significa suponer que la transferencia atrasa la señal introducida a la entrada.
Transformada de Fourier para ondas periódicas
Habíamos visto en el capitulo anterior que la transformada y la antitransformada de Fourier de
una función f (t), periódica de periodo T y de frecuencia fundamentalT
π ω
21 = esta dada por las
expresiones:
∫= −−2/
2/ .).()( 1T T
t ω jn dt et f ω F [54]
∑= ∞
−∞=n
t ω jneω F
T t f 1).(
1)( [55]
Donde conociendo la f (t), la fórmula de la Ec. [54] nos da su espectro de frecuencia.
Inversamente, conociendo el espectro de la función [ ])(ω F , la Ec. [55] nos permite reconstruir la
función.
Ya habíamos visto en el capitulo anterior el cálculo del espectro de frecuencias de algunas ondas
periódicas no sinusoidales.
Veamos como se aplica esto, a la resolución de circuitos.
Cuando una excitación, representable por una serie de Fourier
∑∞
−∞=
=n
t jne E
T t e 1).(
1)( ω
ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 129/424
128
se la aplica a un circuito o sistema cuya función transferencia asociada es T(j.n. ω1), la repuesta
temporal esta dada por la expresión.
( )∑∞
−∞=
=n
t jne E jnT
T t r 1
1 ).(.1
)( ω ω ω [56]
La Ec. [56] es la fórmula que se debe aplicar, para el análisis de circuitos excitados por
funciones periódicas, no sinusoidales.
Trasformada de Fourier para ondas no periódicas
Habíamos visto también en el capitulo anterior, que la expresión de la transformada de Fourier,
para ondas no periódicas, estaba dado por:
∫∞
∞−
−= dt et f F t j .0).()( ω
ω [57]
Es evidente que la transformada F(ω) de la Ec. [57], cumple una función análoga a la F(ω) dada por
la Ec. [54], con la diferencia de que ahora el espectro de frecuencias es continuo, como ya lo
vimos en el capitulo anterior.
La función f(t)o antitransformada, se recupera integrando su espectro F(ω) respecto de la
frecuencia .
∫∞∞−= ω ω
π
ω d e F t f t j .).(21)( [58]
En la práctica, una función periódica puede tratarse como no periódica, porque “se puede
considerar como pulso aislado, a una función, periódica (o no), con duración tal que entre un
pulso y el siguiente se haya pasado el estado transitorio
Esto nos permite, en los casos en que puede hacerse esta simplificación y facilitar el análisis por
aplicación de la integral en lugar de la serie
De la misma manera que con las expresiones [54] y [55], podemos conociendo una excitación no periódica, hallar su espectro (continuo) mediante la Ec. [57].
O bien, conociendo dicho espectro, podemos reconstruir la función del tiempo utilizando la
Ec. [58]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 130/424
129
Aplicación de la integral de Fourier
Plantearemos el problema fundamental del análisis de circuitos conocidos la excitación e1(t) y latransferencia como función continua de la frecuencia T(jω), hallar la repuesta e2(t)
La resolución comprende los siguientes pasos:
a) Dada e1(t), hallamos su espectro E1(ω)
∫∞
∞−
−= dt et e E t j .
11 ).()( ω ω
b) Conociendo E1(ω) y T(Jω), hallamos el espectro de la repuesta E2(ω)
)().()( 12 ω ω jT E E = [59]
c) Por ultimo conocido E2(ω), hallamos la función del tiempo correspondiente a ella, e2(t).
∫= ∞∞−
− ωd eω E π
t e t ω j .22 ).(21)(
Como vemos la Ec. [59] responde a la expresión general para Fourier de:
)().()( ω ω E jT R = [60]
Ejemplo 1: Aplicación de la integral de Fourier a un caso sencillo de síntesis:
Hallar los parámetros que conforman la impedancia Z(jω) (síntesis) que ante una excitación I(t)
conocida, nos dé una repuesta V(t) deseada.
Z(jω))()( t r t v
μ =
)()( t t I =
T(jω) e2 (t)e1(t)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 131/424
130
Conocemos en este caso la excitación, que es un generador de corriente en forma de escalón
unitario, y conocemos también la repuesta temporal, que es la caída de tensión sobre la
impedancia Z(jω).
Deseamos entonces, hallar los parámetro de Z(jω), que cumple con esta condición.
El procedimiento consiste, de acuerdo a lo visto en el párrafo anterior y a través de la Ec. [60], en hallar los espectros de la excitación y de la repuesta, y hacer luego el cociente entre ambos
que nos dará la función transferencia (en este caso la impedancia Z).
Las funciones excitación y repuesta están expresada por.
Como vemos las dos funciones no son periódicas, de ahí que para calcular los espectros de
frecuencias se deberá aplicar la integral de Fourier.
También recordemos que la función escalón unitario, no cumplía con el criterio de convergenciay por tanto, para hallar la transformada de Fourier, había que multiplicar por una exponencial.
t αt α
αeet μt μt I ..
0).(lim)()( ===∴ −
→
Luego:
dt edt edt eeω F t ω jαt ω jt ω jt α∫+∫=∫= ∞ +−−
∞−−∞
∞−−
0).(.0..
1 .)0(.)(
ω jω F
ω jαω F
α
1)(
)(
1lim)( 1
01 =⇒
+=∴
→
Luego el espectro de la excitación esta dada por:
ω ω
j I
1)( =
Calcularemos ahora el espectro de la repuesta
t t ebet V 21 .)( α α −− +=
Excitación: )()( t t I = Repuesta: t t ebet V 21 .)( α α −− +=
I(t)
1
t
b
t

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 132/424
131
( ) ( ) =++=+=∴ −∞ −−−
∞−
−∞
∞−
−−
∫∫∫ dt eebedt edt eebeV t jt t t jt jt t ω α α ω ω α α ω ...0..)(0
210
21
dt ebdt edt eebdt eeωV t ω jαt ω jαt ω jt αt ω jt α
∫+∫=∫+∫= ∞ +−∞ +−−∞ −−∞ −0
)(0
)(00
2121 ..)(
ω α ω α ω
j
b
jV +++=∴
21
1)(
Luego la impedancia en régimen permanente sinusoidal, será:
b jb j
j
bj
j
j
I
V j Z
ω
α
ω
α ω α
ω
ω α
ω
ω
ω ω
21211
1
1
1
)(
)()(
++
+=
++
+==
Analizando esta fórmula, podemos decir que la impedancia total está constituida por dosimpedancias en serie:
21)( Z Z j Z +=ω
Siendo
ω
α
j
Z 1
1
1
1
+=
y
b jb
Z
ω
α 22 1
1
+=
Por último, vemos que estas dos impedancias están formadas por dos impedancias en paralelo.
1
1
1
1 111)(
)(1)(
α ω
ω ω
ω
j
Y Y jY jY
j Z L R +=+=⇒=
⇒==∴ R
Y R1
1 1= R
⇒===
1
1111
α ω
ω j
L j Z Y
L
L
1/1 α = L
Lo mismo para Y2.
2
2
11
α ω
b j
bY +=
de donde b R = y
2α
b L =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 133/424
132
Por último el circuito sintetizado nos queda.
Ejemplo 2: Espectro de un pulso rectangular aislado.
Sea el pulso de la figura y cuya expresión es:
Para hallar su espectro E(ω) aplicamos la Ec. [57]
=⎥⎦
⎤⎢⎣
⎡−==
−−∫
1
0
1
0.)(
T t j
T t j
j
e E dt e E E
ω ω
ω
ω ( ) )(11 ω ω
ω E e j
E T j =−− − [61]
Pero11cos1 T jsenT e
T jω ω
ω −=−
⎟ ⎠
⎞⎜⎝
⎛ −−=∴
ω
ω
ω
ω ω 11 cos1
.)( T
jT sen
E E
En este análisis la parte real representa la envolvente del espectro de los términos coseno y lonegativo de la parte imaginaria, de la envolvente del espectro de los términos seno.
e(t) = 0 para t < 0e(t) = E para 0 ≤ t < T1 e(t) = 0 para t > T1
e(t)
E
t
T1
I(t)
L=1/α1
V(t)
R=1
R=b L=b/α2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 134/424
133
Como caso general, el espectro debe estar representando por dos funciones, los que pueden ser
indistintamente funciones de los términos seno y coseno, o funciones de amplitud y fase.
Como en el caso de la serie de Fourier, el análisis puede a menudo simplificarse y reducirse a
una única función si se elige el eje de tiempo de modo que la función exhiba una conveniente
simetría.Por ejemplo, suponemos que elegimos el origen del tiempo de modo que el pulso empiece en el
instante t = -T1/2 y termine en el instante +T1/ 2.
Hay entonces sólo términos coseno y la Ec. [57] da:
∫−
−− ⎟ ⎠
⎞⎜⎝
⎛ +−==
2/1
2/1
21
21
..)( T
T
T j
T j
t jee
j
E dt e E E
ω ω ω
ω ω
( )2/
2/..
2.
2)(
1
11
1
T
T senT E
T sen
E E
ω
ω
ω ω == [62]
Puesto que E(ω) es real, hay sólo términos coseno con la amplitud relativa dada por la Ec. [62].
Esto ya lo habíamos calculado y representado en el capitulo anterior.
Consideraremos ahora la aplicación de la integral de Fourier en el cálculo de la repuesta de los
así llamados redes ideales, con el objeto de ilustrar el procedimiento.
Un importante resultado de estos cálculos demostrara que estos circuitos en particular no son
físicamente realizables.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 135/424
134
Respuesta transitoria de un filtro pasa bajo (L.P) ideal a una función escalón
Consideremos la repuesta a la función excitación escalón unitario.
Podría esperarse que la descomposición de esta función escalón exija sólo hacer ∞→1T en la
Ec. [61].
No obstante, prefiéranse otros métodos a causa de la dificultad para interpretar el significado de
las funciones sinusoidales en el límite infinito.
Podemos considerar al filtro pasa bajo (LP), como un cuadripolo simétrico pasivo y en
condiciones de adaptación, o sea, cargada con su impedancia característica Z0.-
El filtro pasa bajo (LP) tiene la propiedad de transmitir todas las frecuencias componentes entre -
fc y +fc, sin modificación, excepto por un posible retardo de fase o de tiempo β(ω), y que elimina
por completo todas las frecuencias de valor absoluto mayor que fc.
Como se verá mas adelante, se define como función o constante de propagación de un cuadripolo
en condiciones de adaptación, a la función de transferencia de tensiones dada por la expresión
El filtro pasa bajo (LP), esta conformado por elementos puramente reactivos, lo que nos dice que
α(ω) = 0 y a su vez definimos el retardo de tiempo de la señal al pasar por el cuadripolo como.
td ωω β =)(
En definitiva la función transferencia de tensión T(j ω) queda expresada por:
td ω jeω jT −=)( Para –fc < f < fc
0)( =ω jT Para | f | > fc
e1(t) T(jω) e2 (t) = r (t)
β(ω) | T(Jω) |
ω
-ωc ωc
)(
1
2)( ω γ ω
−== e
e
e jT
β(ω)
Donde
)()(
1
2 .)()()()( ω β ω α ω ω β ω α ω γ
jee
e
e jT j
−==∴+=
α(ω)= Atenuaciónβ(ω)= Retardo de fase

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 136/424
135
Para hallar la repuesta. e2(t) desarrollamos los pasos dados en la Pag. 36.
a) Para E1(ω) utilizamos la expresión dada por la Ec. [61] y luego haremos tender a ∞→1T
b) Conocemos E1(ω) y T(j ω) , hallamos el espectro de la repuesta E2(ω)
( ) td ω jT ω jee
ω j
E ω E −−−= .1)( 1
2
c) Conociendo ya E2(ω) hallamos e2(t) por aplicación de la Ec. [58]
( ) ωd eeeω j
E
π t e t ω jtd ω jT ω j ..1
2
1)( .
21∫ −= ∞
∞−−−
ωd eω j
e
π
E t e td t ω jcω
cω
T ω j)(
2 .)1(
2)(
1 −−
−
∫ −
= [63]
∫∫ −= −
−−−
−
−−cω
cω
T td t ω jcω
cω
td t ω j
ωd ω j
e
π
E ωd
ω j
e
π
E t e
)()(
21
22)(
Por simetría tenemos:
∫⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −−−−
−−−∫ ⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛ −−−−−= cωcω ωd
ω j
T td t ω je
T td t ω je
π
E ωd
ω j
td t ω je
td t ω je
π
E t e 00
)1()1(
2
)()(
2)(2
∫ +−
+∫ −
=∴ cωcω ωd ω
td t T ω sen
π
E ωd
ω
td t ω sen
π
E t e 0
102
)()()( [64]
Nos queda así, la función trascendental definida por la expresión
dx x
senx Xc∫0
Se llama “seno integral de x” y se abrevia Si(x).
El valor de esta función es un desarrollo en serie dado por.
.......!7.7
7!5.5
5!3.3
2)( +−+−= x x x x xSi

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 137/424
136
La representación de esta función es la de la Fig. 7
Cuando ∞→ X , el valor de Si(x) 2/π → .
La Ec. [64] puede entonces escribirse:
[ ] [ ] )()()( 12 td t T cωSitd t cωSiπ
E t e +−+−= [65]
Si se hace ahora tender a infinito T1 de modo que, para cualquier valor de t-td, es T1 mucho
mayor que t-td, entonces, cualquiera que sea el valor de ωc, la Ec. [65] viene dado por:
[ ])(2
)(2 td t ωSiπ
E E t e c −+= [66]
La Fig. 8 ilustra la representación gráfica de esta expresión, que no es sino la repuesta transitoria
del filtro L.P ideal a la función escalón )(t μ E
E
E/2
1/fc
td
Fig. 8- Repuesta del filtro L.P a la función escalón )(t μ E
1/2fc
t
Si(x)
-10 -8 -6 -4 -2 0 2 4 6 8 10
2
1
-2
-1
0
Fig. 7- Grafica de Si(x)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 138/424
137
Es evidente que el efecto de aumentar el valor de T1 hasta infinito en el pulso aplicado consiste
en introducir un termino continuo E/2 en la expresión.
Debe observarse en la Fig. 8, dos casos:
a) El punto de 50 % de repuesta, E/2, se produce un lapso td después de t =0.Además, la curva de repuesta de la Fig. 8 comienza en ∞=t .
Esto significaría que el circuito tiene una propiedad anticipatoria y comienza a responder
antes de aplicar la función excitación.
Es evidente que esta situación es imposible y surge en este problema por el hecho de haberse
elegido independiente y arbitrariamente las características estacionarias de amplitud y fase
(o retardo).
b) El “tiempo de establecimiento” o “repentinidad”, de la repuesta en la vecindad de
t = td, esta relacionado con la frecuencia de corte f c a través de las siguientes expresiones que
se deducen de la Fig. 8.
Tiempo de establecimiento fc
τ e 2
1= pero
π
cω fc =2
ce ωπ τ /=∴
y por otra parte:
π
ω E
dt
t de
τ
E
dt
t de c
e
=∴=)()( 22
O sea que el tiempo de establecimiento es independiente del tiempo de retardo td, pero depende
del ancho de banda (es inversamente proporcional a ωc).
Se deduce de ello que toda señal que atraviesa un circuito de banda pasante finita, tienen un
tiempo de establecimiento no nulo.
Físicamente esto se interpreta en el sentido de que las señales que varían rápidamente en el
tiempo, requieren para su transmisión, filtros con altas frecuencias de corte (filtros de banda
anchas).
En cuanto al tiempo de retardo, depende de las características de fase de la transferencia.
En general se mide por:
ωd
φd td =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 139/424
138
Las consideraciones últimas ponen en evidencia la imposibilidad de obtener un filtro de
características ideales (defasaje nulo en todas las frecuencias y atenuación con pendiente infinita
en las frecuencias de cortes).
Pulso rectangular de duración T1 aplicado a un filtro LP. ideal
En este caso aplicase la tensión, cuya transformada de Fourier esta dada por la Ec. [62], al filtro
ideal cuya transferencia T(jω) ya conocemos.
Por lo tanto podemos hallar la transformada de la repuesta E2(ω).
td ω j
T ω j
T ω j
eeeω j
E ω E ω jT ω E −−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ +−== ..)().()( 22
12
11
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −=
⎟ ⎠ ⎞⎜
⎝ ⎛ +−⎟
⎠ ⎞⎜
⎝ ⎛ − td
T ω jtd
T ω j
eeω j
E ω E 22
2
11
.)(
Conocida E2(ω) hallamos e2(t) por aplicación de la Ec. [58]
ωd eeeω j
e
π t e t ω j
cω
cω
td T
ω jtd T
ω j
....2
1)( .22
2
11
∫⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=−
⎟ ⎠
⎞⎜⎝
⎛ +−⎟
⎠
⎞⎜⎝
⎛ −
ωd ω j
e
π
E ωd
ω j
e
π
E t e
c
c
c
c
ω
ω
ω
ω
td t T
ω jtd t T
ω j
.2
.2
)(22
2
11
∫ ∫−=− −
⎟ ⎠
⎞⎜⎝
⎛ +−−⎟
⎠
⎞⎜⎝
⎛ −+
Por simetría.
ωd ω jee
π E ωd
ω jee
π E t e c cω ω
td t T
ω jtd t T
ω jtd t T
ω jtd t T
ω j
.2
.2
)(0 0
22222
1111
∫ ∫
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−=
⎟
⎠
⎞⎜
⎝
⎛ +−−⎟
⎠
⎞⎜
⎝
⎛ +−⎟
⎠
⎞⎜
⎝
⎛ −+−⎟
⎠
⎞⎜
⎝
⎛ −+
ω ω
ω
π ω
ω
ω
π
ω ω
d
td t T
sen E
d
td t T
sen E
t ec c
.22
..)(0 0
11
2 ∫ ∫⎟
⎠ ⎞
⎜⎝ ⎛ +−
+⎟
⎠ ⎞
⎜⎝ ⎛ −+
=
Finalmente:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 140/424
139
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟ ⎠ ⎞
⎜⎝ ⎛ +−+⎥
⎦
⎤⎢⎣
⎡⎟ ⎠ ⎞
⎜⎝ ⎛ −+= td t
T Sitd t
T Si
E t e
cc 2.
2..)( 11
2 ω ω π
[67]
Los dos términos de la Ec. [67] aparecen entonces como en la Fig. 9 para el caso en que
fc = 1/T1. La repuesta total e2(t) esta también representada en la Fig. 9.-
Se observa que la solución de la Ec. [67] es la misma que la que se obtiene superponiendo dos
soluciones del tipo de la obtenida con la Ec. [66], con un adecuado desplazamiento de los ejes de
tiempos.-
Si fc es igual a 1/2T1 , las dos funciones y su suma aparece como la Fig. 10.-
4
3
2
1
-1
-2
-3 -2 -1 1 2 3
[ ]
[ ])2/(
)2/().(
1
12
td t T Si
td t T Si E
t e
c
c
+−+
−+=
ω
ω π
Fig. 9- Respuesta de un filtro L.P. ideal, a un pulso rectangular de duración T1 =1mseg.La frecuencia de corte del filtro es fc = 1Kc/S.La repuesta y sus componentes se representan en forma normalizada.-
[ ])2/( 1 td t T Si c −+ω
[ ])2/( 1 td t T Si c +−ω
[ ])2/( 1 td t T Si c +−ω
[ ])2/( 1 td t T Si c −+ω
.).( mseg t t d −

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 141/424
140
Si la fc es igual a 2/T1, las dos funciones y su suma son como se ve en la Fig. 11
Por lo tanto, a medida que la frecuencia de corte aumenta, la tensión de salida se va pareciendo
mas a la tensión de entrada.
4
3
2
1
-1
-2
-3 -2 -1 1 2 3
[ ]
[ ])2/(
)2/().(
1
12
td t T Si
td t T Si E
t e
c
c
+−+
−+=⎟ ⎠ ⎞
⎜⎝ ⎛
ω
ω π
Fig.- 11- Respuesta de un filtro L.P a un pulso rectangular de duraciónT1 =1m.seg. Con fc = 2Kc/S.
[ ])2/( 1 td t T Si c −+ω [ ])2/( 1 td t T Si c +−ω
.).( mseg t t d −
[ )2/( 1 td t T Si c +−ω
[ ])2/( 1 td t T Si c −+ω
4
3
2
1
-1
-2
-3 -2 -1 1 2 3
[ ]
[ ])2/(
)2/(
1
1)(2
td t T Si
td t T Si E
e
c
ct
+−+
−+=⎟ ⎠ ⎞
⎜⎝ ⎛
ω
ω π
Fig. 10. Respuesta de un filtro L.P ideal a un pulso rectangular de duraciónT1 =1mseg. Con fc = 500c/S.
[ ])2/( 1 td t T Si c −+ω [ ])2/( 1 td t T Si c +−ω
.).( mseg t t d −
[ ])2/( 1 td t T Si c +−ω
[ ])2/( 1 td t T Si c −+ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 142/424
141
Es evidente que la fc tiene que ser por lo menos igual a 1/2T1 para que la reproducción del pulso
sea aceptable.
Estos hechos permiten sacar ciertas conclusiones con respectos a los circuitos de radio
frecuencias utilizadas en comunicación.
En los circuito telegráficos de tele impresión, se asignan siete intervalos de tiempo a cada grupode código literal, y durante cinco de estos intervalos puede o no estar aplicada la tensión
intervalo por intervalo, según el código literal trasmitido.
Si se trasmite. 60 palabras por minuto y cada palabra contienen 5 letras, el número de pulsos
posibles por minuto es:
n = 60 * 5 * 7 = 2.100
Vale decir, hay 35 pulsos posibles por segundo, luego T1 =1/35.
El sistema de transmisión debe diseñarse para trasmitir frecuencias de hasta 18c/s, preferiblemente más.
En televisión, por otra parte, se ha establecido que deben trasmitirse 30 imágenes por segundo,
con un detalle de alrededor de 250.000 puntos cada una.
Por lo tanto, el pulso más breve por reconocer tendría una duración aproximada de
1/7.500.000 seg.
Luego el sistema debe ser capaz de trasmitir hasta la frecuencia de 3,5 M c/s, por lo menos, el
ancho de banda de los trasmisores de video se ha normalizado en 4 M c/s.-
Respuesta transitoria de un filtro pasa banda ideal (B.P) a la función escalón
Sea un filtro B.P ideal cuya característica de módulo y fase son ahora las representadas en la
Fig. 12
º
- ω
Fig. 12-Característica de amplitud y fase de un filtro pasa banda (B.P) ideal
1
ω0- ω0
β(ω)
β(ω) β(ω)
β(ω)
ω1 ω2- ω1- ω2
ω
Tj(ω)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 143/424
142
En un filtro B.P. ideal se transmiten sólo la frecuencia comprendidas entre ω1 y ω2, las dos
frecuencias de cortes, y, cuando se usan expresiones en que intervienen frecuencias negativas,
también las frecuencias comprendidas entre -f 1 y –f 2.
La función transferencia del filtro (B.P) se expresa por:
td ωω jeω jT )( 0).( −− Para
21 ω ω ω ≤≤
Como vemos existe igualmente un retardo de tiempo td.
A este filtro lo excitamos con una función escalón unitario e(t) = µ(t) cuya transformada ya la
calculamos en el ejemplo 1
ω j
E ω E =∴ )(1
Con estas dos expresiones podemos obtener la repuesta trasformada:
td je
j
E E
)0(
2 .)( ω ω
ω ω
−−=
Conocida E2(ω) hallamos e2(t) por aplicación de la Ec. [58]
ωd ω j
eee
π
E ωd e
ω j
e
π
E t e
td ω jt ω jtd ω jt ω j
td ωω j
...
2.
2)(
00 .)(
2 ∫=∫= ∞∞−
−∞
∞−
−−
ωd
ω j
e
π
E K ωd
ω j
e
π
e E t e
td t ω jtd t ω jtd ω j
.
2
.
2
.)(
)()(
20
∫=∫= ∞∞−
−∞
∞−
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡∫+∫=
−−−
−2
112 22
)()()(
2 ω
ω
td t ω jωω
td t ω j
ωd ω j
eωd
ω j
e
π
KE t e
Considerando la influencia de la banda de la izquierda despreciable nos quedaría:
∫=−
21 2
)()(
2 ω
ω
td t ω j
ωd ω j
e
π
KE t e
Pero aplicando un artificio y por la regla de simetría
⎥⎥⎦
⎤
⎢⎢⎣
⎡∫
−−∫
−=
−−−−−−12
0
)()(
0
)()(
2 22)( ω
td t ω jtd t ω jω
td t ω jtd t ω j
ωd ω j
eeωd
ω j
ee
π
KE t e
⎥⎦
⎤⎢⎣
⎡∫
−−∫
−= 12
002)()(
)( ωω ωd ω
td t ω senωd
ω
td t ω sen
π
KE t e
Finalmente.
[ ] [ ] td t ωSitd t ωSiπ
KE t e −−−= ()()( 122 [68]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 144/424
143
Como era de esperar no aparece ningún término constante, como daba en el caso del filtro (L.P.)
pasa bajo, puesto que no es transmitido.
Las dos funciones [ ])(2 td t ωSi − y [ ]td t ωSi −(1 aparecen entonces como en la
Fig. 13-a).
La repuesta total que es la tensión de salida, está ilustrada en la Fig. 13-b)Obsérvese que la duración de la repuesta principal es inversamente proporcional a la frecuencia
de corte más baja, mientras que el tiempo de crecimiento es inversamente proporcional a la
frecuencia de corte más alta.
En la Fig. 14 se ha representado un grafico de precisión de la repuesta para el caso en que
f 2 = 2f 1.
Fig. 13- Respuesta del filtro B.P ideal al escalón )(t E = . a) Componentes Si(x) de la
repuesta. b) Forma general de la repuesta obtenida sumando las dos de a)
Si [ω2(t-td)]
e0(t)
1/f 2
b)
t
1/f 1
td
Si [ω2(t-td)]
Si [ω1(t-td)]
td t
a

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 145/424
144
Fig. 14- Respuesta del un filtro pasa banda ideal (B.P.) al escalón )(. t E . Con f 1 = 500c/s y f 2 = 1kc/s.
La repuesta y sus componentes se representan en forma normalizada.
Si [ω1(t-td)] f 1=05Kc
3
Si [ω1(t-td)] f 2=1Kc
(t-td)mseg
-2
-π/2
-1
1
π/2
2
-1
e2(t)(π/E) = Si [ω2(t-td)]-Si[ω1(t-td]
1 2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 146/424
145
TEORIA
DE LOS
CUADRIPOLOS
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 147/424
146
INDICE Pág.
Redes de dos puertas. ........................................................................................................................... 148
Definición de cuadripolo. ........................................................................................................... .......... 148
Clasificación de cuadripolos. ................................................................................................................ 148
Tipos de problemas. ............................................................................................................................... 150
Ecuaciones, parámetros y matrices característicos. ............................................................................... 152
Definición de los parámetros de cuadripolos. ........................................................................................ 153
Parámetros de impedancia. ...................................................................................................................... 153
Parámetros de admitancia. ......................................................................................................................155
Cuadripolos activos. .............................................................................................................................. 158
Parámetros híbridos. ............................................................................................................................. 161
Parámetros h. ........................................................................................................................................ 161
Parámetros g. ........................................................................................................................................ 162
Circuitos de medición. ......................................................................................................................... 163
Parámetros de transmisión. .................................................................................................................. 165
Forma matricial. .................................................................................................................................. 166
Parámetros de transmisión inversa. ..................................................................................................... 166.Interconexión de cuadripolos en cascada. ........................................................................................... 167
Relaciones entre conjuntos de parámetros. ......................................................................................... 171
Apéndice I. .......................................................................................................................................... 173
Equivalencia de cuadripolos. .............................................................................................................. 176
Información suministrada por los parámetros. .................................................................................... 178
Tabla I de conversión de parámetros. ................................................................................................. 181
Tabla II condición de pasividad y simetría. ........................................................................................ 181
Interconexión de cuadripolos. ............................................................................................................ 183
Permisivilidad de interconexión. ........................................................................................................ 184
Interconexión serie. ............................................................................................................................. 186

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 148/424
147
Interconexión de cuadripolos en serie-paralelo y paralelo-serie. ........................................................ 189
Tabla III interconexión de cuadripolos. .............................................................................................. 191
Cudripolos pasivos y simétricos especiales. ...................................................................................... 192
Impedancia característica. .................................................................................................................. 193
Función o Cte de propagación. .......................................................................................................... 196
Determinación de la función de propagación a partir de lasimpedancias de cortocircuito y circuito abierto. …………………………………………………..... 199
Sección en T......................................................................................................................................... 201
Seccion en π. .................................................................................................................................... ..202
Sección en celosía. .............................................................................................................................. 203
Cuadripolo simétrico totalmente desadaptado. .................................................................................. 204
Cadripolos asimétricos. ....................................................................................................................... 209
Calculo de la impedancia imagen. ....................................................................................................... 209
Función propagación. .......................................................................................................................... 2102
Determinación de la función de propagación e impedancia imagen ,a partir de las impedancias en cortocircuito y circuito abierto. ………………….............................. 115
Cuadripolo asimétrico desadaptado. ……............................................................................................ 216
Factor de inserción. ............................................................................................................................. 218
Perdida de inserción. ........................................................................................................................... 219
Adaptación de impedancias. ................................................................................................................ 222

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 149/424
148
TEORIA DE LOS CUADRIPOLOS
REDES DE DOS PUERTAS
Introducción: Es propósito para esta primera parte de este capitulo exponer en forma general los principios y conceptos fundamentales asociados a las redes de dos pares de
terminales, o redes de dos puertas, y que en adelante se la denominara “cuadripolo”.
Definición de cuadripolos:
Un cuadripolo, es una configuración arbitraria de elementos de
circuito, que tiene dos pares de terminales para su conexión con el resto del esquema eléctrico,
debiendo cumplirse como condición adicional que los terminales de entrada estén vinculados con
lo de salida solo a través del interior del cuadripolo.
En la Fig. 1 se representa su símbolo, y los correspondientes sentidos de referencia para las
variables eléctricas.
En el se debe establecer además que dos terminales por ejemplo 1 y 1’ son entrada y los otros
dos 2 y 2’ son salidas.
Pueden estar unidos un terminal de entrada con uno de salida, por ejemplo: 1’ y 2’.
Al definir así quiere decir que no se puede aplicar la señal entre los terminales 1y 2.
Debido a que no se imponen restricciones sobre el tipo de circuito incluido dentro del cuadripolo,la amplitud de la teoría en cuestión queda en evidencia , por lo cual los conceptos podrán
aplicarse, por ejemplo, a circuitos amplificadores que incluyen dispositivos de vacío o
semiconductores.
Clasificación de cuadripolos
Los cuadripolos pueden clasificarse según distintos criterios a saber:
Según los tipos de elementos que incluyen:
Activos: Son aquello que incluyen generadores controlados como los estudiados en
Fig.1
I1 I2
V1 V2
1 2
2’1’
E
n
t
r
a
d
a
S
a
l
i
d
a

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 150/424
149
electrónica.Pasivos: Son aquellos en los cuales no se incluyen generador alguno.
Según las características de los elementos incluidos:
Lineales: Resultan aquellos en lo todos sus elemento son lineales.
Alineales: Resultan aquellos que tienen uno mas elementos alinéales.
Es de hacer notar que el análisis a realizar en este capitulo se referirá exclusivamente a los
cuadripolos lineales.
Según el sentido de transferencia de la energía:
Bilaterales: Son los que permiten la transferencia de la energía en ambos sentidos con igualfacilidad.
Unilaterales: Son los que permiten la transferencia de energía con mayor facilidad en unsentido que en el opuesto.
Según el tipo de configuración:
Simétricos: Son aquellos que presentan igual impedancia entre los terminales de entrada y los desalida.
La simetría puede ser eléctrica y topológica (presentando igual impedancia e igual geometría
entre sus dos pares de terminales) o solamente eléctrico (igual impedancia pero distinta
geometría).
Por ejemplo, en la configuración H de la Fig. 2.
Si las impedancias z3 y z4 son iguales a z1 la simetría es completa (eléctrica y topológica).
En este caso particular en que el cuadripolo presenta a su vez una simetría longitudinal (o sea la
rama superior tiene igual impedancia que la rama inferior) se dicen que son “balanceados”,
porque el cuadripolo se encuentra eléctricamente balanceado a tierra.
En el caso de la Fig. 3 el cuadripolo no presenta simetría topológica pero bajo ciertas
condiciones de frecuencia puede presentar simetría eléctrica.
Fig.2. Configuración H
z1
z2
z1
z4

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 151/424
150
En definitiva, se verifica que un cuadripolo es simétrico cuando se permutan los terminales de
entrada por lo de salida, y dicho cambio no es advertido desde los terminales mencionados.
Asimétricos: Son los cuadripolos que presentan impedancia de entrada y salida distintas.
Tipos de problemas:
Los tres tipos de problemas básicos que pueden resolverse con la teoría de los cuadripolos son
los siguientes:
1).- El problema de la transferencia: Trata de la determinación de la tensión o la corriente en los
terminales de salida en función de la tensión o la corriente
en lo terminales de entrada.
Este problema que aparece comúnmente en electrónica, presenta dos casos particulares de gran
importancia, y es cuando los terminales de salida del cuadripolo se encuentran a circuito abierto
o bien cortocircuitado.
Como se verá, este problema puede ser resuelto en base a ciertos parámetros del cuadripolo,
denominados de “transferencia”, y que precisamente se definen para las condiciones ante
especificadas.
2).- El problema de la transmisión: Trata de la determinación de la potencia en un par determinales en función de la potencia en el otro par.
Este problema se presenta comúnmente en las líneas de transmisión de energía, y un juego
particular de parámetros llamados de “transmisión” permite resolver el problema en forma
sencilla, como se verá más adelante.
3).- El problema de la inserción: Trata de la determinación del efecto que provoca la
inserción de un cuadripolo en un conjunto mas amplio.
Este problema se presenta, por ejemplo, al insertar un filtro en un circuito con el objeto de
perfeccionar su funcionamiento.
Fig.3

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 152/424
151
En este caso se desea encontrar la tensión, la corriente o la potencia en la carga después de la
inserción del cuadripolo en función de la tensión, la corriente o la potencia en la carga ante de
efectuar dicha inserción.
Obviamente se busca determinar las pérdidas por inserción.
Varios de los conjuntos de parámetros a definir permiten el cálculo de las pérdidas por insercióny en algunos casos particulares debido a valores específicos que toma la impedancia que carga el
cuadripolo, el análisis se simplifica y se reduce al problema de la transmisión.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 153/424
152
Ecuaciones, parámetros y matrices característicos
En la Fig. 1 se a ilustrado la representación del cuadripolo las propiedades del mismo pueden
estar descriptas por la siguiente función implícita de cuatro variables;
0),,,( 2121 ≅ I I V V F Ec. [1]
Obviamente, de la forma en que está planteada la Ec. [1] resulta incomodo para su empleo, por
lo cual es conveniente desdoblarla en pares de ecuaciones explicita de dos variables, y en base a
todos los pares de combinaciones posibles pueden formarse las siguiente tabla
Función
Nombres de los parámetros Expresa En función deEcuación
De impedancias o decircuito abierto
V1 , V2 I1 , I2
V1=Z11.I1+Z12.I2
V2=Z21.I1+Z22.I2
De admitancias o decortocicuito
I1 , I2 V1 , V2 I1=Y11.V1+Y12.V2
I2=Y21.V1+Y22.V2
Transmisión V1 , I1 V2 , I2
V1=A.V2-B.I2
I1=C.V2-D.I2
Transmisión inversa V2 , I2 V1 , I1 V2=A’.V1-B’.I1
I2=C’.V1-D’.I1
Híbridos V1 , I2 I1 , V2 V1=h11.I1+h12.V2
I2=h21.I1+h22.V2
Híbridosinversos
I1 , V2 V1 , I2 I1=g11.V1+g12.I2
V2=g21.V1+g22.I2
Como se pudo observar en esta tabla, los nombres de los parámetros se escogen por indicar
dimensiones (impedancia, admitancia) la carencia de dimensiones consistente (híbridos) o la
aplicación principal del parámetro (transmisión)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 154/424
153
Definición de los parámetros del cuadripolo
Alos efectos de la definición y obtener las expresiones de todo los parámetros del cuadripolo en
la Fig. 4 se dibuja el cuadripolo con los sentido comencionales dado a las corrientes y la
tensiones que se utilizara en todo este capitulo.
Parámetros de impedancia: (o de circuito abierto)
Si escribimos las ecuaciones de las tensiones en función de las corrientes será:
2221212
2121111
..
..
I z I z V
I z I z V
+=
+= [2]
Puede darse a los parámetros zij de estas ecuaciones un sentido físico bien definido y además
pueden ser medibles atravéz de los circuitos de las Fig. 5 y 6
Así si se impone la condición de I2=0 (bornes de salida a circuito abierto), el sistema de Ec. [2]
se reduce a:
1212
1111
.
.
I z V
I z V
=
=
La cual permite establecer las siguientes definiciones
01
111
2 =⎥⎦
⎤
⎢⎣
⎡
= I
I
V
z
Que es la “impedancia de entrada en vacío” o sea con los terminales de salida en circuito abierto.
01
221
2 =⎥⎦
⎤⎢⎣
⎡=
I I
V z
Que es la relación entre la tensión de salida (en vacío) y la corriente inyectada en los bornes de
entrada y se llama “impedancia de transferencia directa” con la salida en circuito abierto.
Fig.4. Sentidos convencionales de V e I
I1 I2
V1 V2
+ +
--
Entrada Salida

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 155/424
154
De la misma forma, poniendo en la Ec. [2] I1=0, es decir, dejando la entrada en circuito abierto,
resulta.
2222
2121
.
.
I z V
I z V
=
=
Por lo tanto
02
222
1=⎥⎦
⎤⎢⎣
⎡=
I I
V z
Que se la denomina “impedancia de salida en vacío”, o sea con los bornes de entrada en circuito
abierto.-
02
112
1=
⎥
⎦
⎤⎢
⎣
⎡=
I I
V z
Que es la relación entre la tensión de entrada (en vacío) y la corriente inyectada en los bornes de
salida y se la denomina “impedancia de transferencia inversa” con la entrada en circuito abierto.-
Agrupando estos parámetros en forma matricial, formamos la matriz impedancia [z].
[ ] ⎥⎦
⎤⎢⎣
⎡=
2221
1211
z z
z z z
Fig. 6. Circuito para medición de los parámetros z22 y z12
V1 V2+ +
--I2
Fig. 5. Circuito para medición de los parámetros z11 y z21
V1 V2+
+
--
I1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 156/424
155
Ejemplo 1: Hallar los parámetros de impedancia de la red “T” de la Fig. 7
[ ] ( )
( )⎥⎦
⎤⎢⎣
⎡
+
+=⇒==
+=
+=
322
222112
3222
2111
21 z z z
z z z z z z z
z z z
z z z
Parámetros de admitancia (o de cortocircuito)
Si escribimos las ecuaciones de las corrientes en función de las tensiones será:
2221212
2121111
..
..
V Y V Y I
V Y V Y I
+=
+= [3]
Si en el sistema de la Ec. [3] se impone la condición de V2=0 o sea los terminales de salida en
cortocircuito, el sistema se reduce a:
1212
1111
.
.
V y I
V y I
=
=
De aquí se deduce que:
01
111
2 =⎥⎦
⎤⎢⎣
⎡=
V V
I y
Que representa la “admitancia de entrada” con la salida en cortocircuito.
Además:
01
221
2 =⎥⎦
⎤⎢⎣
⎡=
V V
I y
Que representa la corriente en la rama (cortocircuitada) de salida cuando se aplica a la entrada
una tensión unidad y se denomina “admitancia de transferencia directa” con la salida en
cortocircuito.
z1 z3
z2
Fig. 7

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 157/424
156
En la Fig. 8 se representa el circuito para medir estos dos parámetros de admitancia.
De la misma forma, si se cortocircuitan los terminales de entrada (V1=0) resulta:
2222
2121
.
.
V y I
V y I
=
=
De donde:
02
222
1=⎥⎦
⎤⎢⎣
⎡=
V V
I y
Es la “admitancia” vista desde los bornes “de salida” con los terminales de entrada en
cortocircuito.
Además:
02
112
1=
⎥⎦
⎤⎢⎣
⎡=
V
V
I y
que es la relación entre la corriente en la rama (cortocircuitada) de entrada, cuando a la salida se
aplica una tensión unidad o “admitancia de transferencia inversa” con la entrada en cortocircuito.
En la Fig. 10, se muestra el circuito para medir estos dos parámetros de admitancia.
Escribiendo estos parámetros en forma matricial, formamos la matriz admitancia [y]
[ ] ⎥⎦
⎤⎢⎣
⎡= 2221
1211
y y
y y
y
Fig.10. Circuito de medición de y22 e y12
V2I1
I2
+
-
Fig.8. Circuito de medición de y11 y y21
I2
+
-V1
I1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 158/424
157
Ejemplo 2: Hallar los parámetros de admitancia de la red π de la Fig. 11.
b
cb
ba
y y y
y y y
y y y
−==
+=
+=
1221
22
11
)(
)(
[ ] ( )
( )⎥⎦
⎤⎢⎣
⎡+−
−+=∴
cbb
bba
y y y
y y y y
V1
-
+
y b
ya yc
Fig. 11
I1 I2
V2
-
+

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 159/424
158
Cuadripolos Activos
Hasta ahora hemos visto en los dos ejemplos anteriores de cuadripolos pasivos, que los
parámetros se calculan aplicando simplemente sus definiciones.
El problema se complica cuando el cuadripolo contiene elementos activos o sea generadores
controlados.
Veamos un caso:
Ejemplo 3: El circuito de la Fig. 12 es un cuadripolo activo.
Calcular los parámetros de impedancia de dicho cuadripolo activo.
a).- Calculo de los parámetros con I2 = 0:
Del circuito:
z
V I I I I a=⇒+= 1111 ''''
Además:
)3.(.2.2
11
.2
)1(.
.2
)1(.''.2.''.
1
121
K z
V
z
K
z V
z
K V
z
V I
z
K V I z I V K V
a
aa
a
aaa
−=⎟ ⎠
⎞⎜⎝
⎛ −+=
−+=∴
−=⇒=−
z
K V I a .2
)3(.1
−=∴ [4]
De la Ec. [4] se desprende
1.)3(
.2 I
K
z V a −
= [5]
Hemos calculado I1; por tanto debemos calcular ahora V2 y V1 siempre con los terminales desalida en circuito abierto.
V1
z
z z
Fig. 12
I1 I2
-
V2
-
++
z zVa
I’1 I’’ I’’2
I’1
+
-KVa
Vb

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 160/424
159
Del circuito:
z I V K V V ab .. ´´12 +==
Reemplazando 1'' I
⎟ ⎠ ⎞⎜
⎝ ⎛ −+=−+=
21..
.2)1(..2 K K V z
z K V V K V aaa
2
)1(.2
K V V a
+=∴ [6]
Del circuito:
aV Z I V += .11
Reemplazando en esta ultima la expresión de Va dada por la Ec [5]
z K
K I V .
3
5.11 ⎟
⎠
⎞⎜⎝
⎛ −−
=∴ [7]
Ahora ya podemos calcular z11 y z21
∴⎥⎦
⎤⎢⎣
⎡==01
111
2 I I
V z Por lo tanto utilizando la Ec. [4] => ( )
K
K z z
−−
=3
5.11
01
221
2 =⎥⎦
⎤⎢⎣
⎡=
I I
V z Por lo tanto haciendo [ ]
[ ]4.
6.
Ec
Ec => K
K z z
−+
=3
)1(21
b).- Cálculo de los parámetros con I1=0
Del circuito:
⎟ ⎠
⎞⎜⎝
⎛ =⇒+= −
z
KV V I I I I
ab2222 '''`
Pero 2/ba V V =
)2(2
2/.'2 k
z
V
z
V K V I
bbb−=⎟
⎠
⎞⎜⎝
⎛ −=∴
Además
⎟ ⎠
⎞⎜⎝
⎛ = z
V I
b
2'' 2
⎟ ⎠
⎞⎜⎝
⎛ −
+=⎟ ⎠
⎞⎜⎝
⎛ −
+= K
z z I I
K
z z I V
3
2..
3
211.11

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 161/424
160
Luego
)21.(2
)2.(22
2 k z
V k
z
V
z
V I
bbb−+=−+=
)3.(22 k z
V
I
b
−=∴ [8]
=> 2.)3(
2 I
K
z V b
−= [9]
Calcularemos ahora V2 y V1
z I V V b .22 +=
Reemplazando en esta la expresión de V b dada por la Ec. [9]
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
−−
=−
+= ∴)3(
5..
)3(
2. 22222
K
K z I V I
K
z z I V [10]
Además: V1= V b /2 [11]
Con estas expresiones finalmente podemos calcular z22 y z12
∴⎥⎦⎤
⎢⎣⎡=
=02
222
1 I I
V z Utilizando la Ec. [10] ⎟
⎠ ⎞⎜
⎝ ⎛
−−=
K
K z z
35.22
02
112
1 =⎥⎦
⎤⎢⎣
⎡= I
z I
V Haciendo [ ]
[ ]8.
11.
Ec
Ec => ⎟ ⎠
⎞⎜⎝
⎛ −
= K
z Z z
3.12
A diferencia de los dos ejemplos anteriores de cuadripolos pasivos en que eran
Z12=Z21, en este último caso nos da Z12 ≠ Z21.
Esta última condición es la que caracteriza a los cuadripolos activos.Por último debemos decir que el echo de que Z11 = Z22 es pura coincidencia y no constituye
ninguna regla.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 162/424
161
Parámetros híbridos
Los parámetros llamados híbridos, h y g , que se estudian continuación encuentran una
aplicación muy amplia en los circuitos electrónicos, sobre todo en la construcción de modelos
equivalentes para transistores.
Las propiedades de estos parámetros y su interpretación en función de las variables para redes de
dos puertos se basan en las ecuaciones que veremos a continuación.
Parámetros h:
2221212
2121111
..
..
V h I h I
V h I hV
+
+
=
= [12]
Haciendo en el sistema de Ecs. [12] V2 =0 nos queda:
1212
1111
.
. I h I
I hV
==
De donde se obtienen:
01
111
2 =⎥⎦⎤
⎢⎣⎡=
V I
V h
Que es la “impedancia de entrada” con la salida en cortocircuito y:
01221
2 =⎥⎦⎤⎢⎣⎡=
V I I h
que es la “ganancia de corriente” con la salida en cortocircuito.-
Para la obtención de los otros dos parámetros debemos hacer I1 = 0 en el sistema de Ecs. [12] o
sea dejando abierto los terminales de entrada.
2222
2121
.
.
V h I
V hV
=
=
De donde se obtienen:
02
112
1 =⎥⎦⎤
⎢⎣⎡=
I V
V h
que es la “ganancia de tensión inversa” con el circuito de entrada, abierto.
Además:
02
222
1 =⎥⎦
⎤
⎢⎣
⎡
= I V
I
h
que es la “admitancia de salida” con los terminales de entrada, abierto.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 163/424
162
Parámetros g :(o híbridos inversos)
Estos parámetros g se deducen del siguiente sistema de ecuaciones:
2.221212
2.121111
.
.
I g V g V
I V I
+=
+= [13]
Haciendo en el sistema de Ecs. [13] I2 = 0, o sea dejando abierto los terminales de salida nos
queda:
1212
1111
.
.
V g V
V g I
=
=
De donde se obtienen:
01
1
112 =⎥⎦
⎤
⎢⎣
⎡
= I V
I
g
que es la “admitancia de entrada” con la salida en circuito abierto y:
01
221
2 =⎥⎦⎤
⎢⎣⎡=
I V
V g
que es la “ganancia de tensión directa” con la salida en circuito abierto.-
Para la obtención de los otros parámetros debemos hacer V1=0 en el sistema de Ecs. [13] o seacortocircuitando los terminales de entrada
2.222
2.121
I g V
I g I
=
=
De donde se obtienen
02112
1=⎥⎦⎤⎢⎣
⎡=V I
I g
que es la “ganancia de corriente inversa” con la entrada en cortocircuito
Además
02
222
1 =⎥⎦
⎤⎢⎣
⎡=V I
V g
que es la “impedancia” vista desde los terminales “de salida” con la entrada en cortocircuito.
Como vemos los parámetros h y g son dimensionalmente mixtos y por esta razón se denominan
parámetros híbridos.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 164/424
163
Circuitos de medición
En la Fig. 12 se representa los cuatros circuitos para medir los parámetros h y g vemos que a) y c)
son los que se utilizan para la medición de los parámetros h y b) y d) los que se utilizan para la
obtención de los parámetros g.
a)
b)
c)
d)
Fig.12. Circuitos de medición de los parámetros h y g
Como dijimos anteriormente los parámetros h y g son particularmente útiles para larepresentación de cuadripolos unilaterales (no bilaterales), como por ejemplo, los que contienen
fuentes controladas.
En la Fig. 13 y 14 se dan los circuitos equivalente para la vinculación de los parámetros h
(Fig.13) y de los parámetros g (Fig.14).
Tales representaciones en forma de cuadripolos se conocen como equivalente con dos
generadores de los parámetros h y g.
En efecto aplicando las leyes de Kirchhoff en los circuitos de la Fig. 13 y 14 se obtienen los
sistemas de Ecs. [12] y [13] respectivamente.
V
+
-
+
-
I1
11 g ≡ y 21 g V
V1
I2
+
-
+
-12h≡ y 22h
V2
V2I1 +- 22 g ≡ y 12 g I2
I1 V1
+
-11h≡ y 21h I2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 165/424
164
Fig. 13. Cuadripolo equivalente con dos generadores en términos de los parámetros h.-
Fig. 14. Cuadripolo equivalente con dos generadores en términos de los parámetros g.-
Ejemplo 4: En la Fig. 15 se representa el circuito equivalente de un transistor en conexión emisor
común.
Aplicando las leyes de Kirchhoff en el circuitos de la Fig. 15 se obtenemos las siguientes
ecuaciones:
211 ..).( V I r r V bceb μ ++=
d e
cb
r r
V I I
++=
212 .α
Por otro lado si aplicamos directamente al circuito de la Fig. 15 la definición de los parámetros h
vistas anteriormente, se tienen los siguientes valores:
-µ bc.V2
+
r b r c
r d
r eαcb.I1
I2
V2
-
+ +
-
V1
I1
Fig. 15. Modelo equivalente del transistor en conexión emisor
V1
+
-
+
-
+
-
I2 g12 V2
g22
I1 I2
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
+=
≡
2221212
2121111
..
..
I g V g V
I g V g I
g11 V1g21
+
-
+
-
+
-
h11
V2 h12 V2h22h21I1
I1
V1
I2
⎪
⎭
⎪⎬
⎫
⎪
⎩
⎪⎨
⎧
+=
+=
≡
2221212
2121111
..
..
V h I h I
V h I hV

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 166/424
165
)(01
1
11
2
eb
V
r r I
V h +=⎥⎦
⎤⎢⎣⎡=
=
y cbcb
V I
I
I
I h α
α ==⎥⎦
⎤⎢⎣
⎡== 1
1
01
221
.
2
cbcb
I V V
V V h μ μ ==⎥⎦⎤⎢⎣⎡=
= 22
02112 .
1 y
d e
be
I r r V
r r V
V
I h +=
+=⎥⎦⎤⎢⎣⎡=
=
1/
2
2
02
222
1
La sencillez de estos resultados sugiere la utilidad de los parámetros híbridos h y g para
representar circuitos equivalentes de transistores.
Parámetros de transmisión
Los parámetros de transmisión sirven para relacionar el voltaje y la corriente de entrada con elvoltaje y la corriente de salida. En forma de ecuación sería.
22221
22221
..).(.
..).(.
I DV C I DV C I
I BV A I BV AV
−=−+=
−=−+= [14]
En donde A, B, C y D son los parámetros de transmisión.
Estos parámetros se conocen con varios nombres, entre los que se encuentran los de “cascada” y
por supuesto, los parámetros ABCD.
Nosotros los llamaremos de “transmisión”.
Su primera aplicación se hizo en el análisis de líneas de transmisión de potencia, en donde se los
conocen también como “parámetros de circuito general”.
El signo negativo del segundo término del sistema de Ecs. [14] se origina de dos convenciones
diferentes para asignar un sentido positivo a I2.
En los problemas de transmisión de potencia se acostumbra a asignar a la corriente un sentido de
referencia opuesto al que asignamos en la Fig. 4.
Por lo tanto, los signos menos de las Ecs. [14] son para I2 y no para B.
Esto es, trabajando con las convenciones de la Fig. 4.
Para la obtención de los parámetros se debe hacer en el sistema de Ecs. [14] dos consideraciones
en los terminales de salida primero se deja abierto (en vacío) y luego se cortocircuita.
Luego:
02
1
2 =⎥⎦⎤
⎢⎣⎡=
I V
V A Adimensional
que es la “inversa de las ganancias de tensiones” con la salida en vacío.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 167/424
166
Además:
2102
1 1
2 z V
I C
I
=⎥⎦
⎤⎢⎣
⎡==
(Dimensión de admitancia)
que es la “inversa de la impedancia de transferencia directa” con la salida en vacío.
Se hace notar que 2121
1 y
z C ≠= ya que para hallar C se toma a I1 como excitación y a V2
como repuesta y en cambio para y21 se toma a V1 como excitación y a I2 como repuesta.-
Para el cálculo de B y D se dejan los terminales de salida en cortocircuito o sea V2 = 0.
De donde:
2102
1 1
2 Y I
V B
V
=
⎥⎦
⎤
⎢⎣
⎡=−=
(Dimensión de impedancia)
que es la “inversa de la admitancia de transferencia directa” con la salida en cortocircuito.-
Igualmente aquí podemos decir que 2121
1 z
y B ≠=− ya que para hallar –B se toma a V1 como
excitación e I2 como repuesta, en cambio para hallar z21, se toma a I1 como excitación y a V2
como repuesta.-
Además
02
1
2 =⎥⎦⎤
⎢⎣⎡=−
V I
I D (Adimensional)
que es la “inversa de la ganancia de corriente” con la salida en cortocircuito._
Forma matricial:
Si escribimos el sistema de Ecs. [14] en forma matricial nos queda:
⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
2
1
1.
I
V
DC
B A
I
V
Donde: [ ] [ ] BC D A DC
B A−=⇒⎥
⎦
⎤⎢⎣
⎡= .γ γ
Es la matriz de los parámetros de transmisión
Parámetros de transmisión inversas:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 168/424
167
Si a la inversa del sistema de Ecs. [14], se expresan la tensión y la corriente de salida en función
de la tensión y la corriente de entrada, entonces las ecuaciones son:
V2 = A’.V1 + B’.(-I1)= A’.V1-B’.I1 [15]
I2 = C’.V1 + D’.(-I1)= C’.V1-D’.I1
y los parámetros de transmisión inversas son A’, B’, C’y D’.
Estas ecuaciones se aplican a la transmisión en sentido opuesto al que se indica en las Ecs. [14].
Los parámetros A’, B’, C’, D’ tienen propiedades similares a los que se analizan para los
parámetros A, B, C, D.-
Para su obtención se hace un razonamiento enteramente similar al que veníamos haciendo para la
obtención de los otros parámetros.
Interconexión de cuadripolos en cascada
Los parámetros de transmisión son útiles cuando se interconectan cuadripolos en cascada, en este
caso la matriz total se halla como simple producto de las matrices parciales.
También pueden ser útiles para la solución de ciertos circuitos complejos, mediante la
subdivisión en dos o más cuadripolos sencillos, conectados en cascada.
Del cálculo de las matrices [ ]γ parciales (que puede ser inmediato), se pasa ala matriz [ ]γ total,
por el producto (matricial) de las matrices[ ]γ parciales.
Demostración:
Sean dos cuadripolos A y B conectados en cascada como en la Fig. c), cada uno de ellos, con su
ecuación matricial de parámetros de transmisión.
⎥
⎦
⎤⎢
⎣
⎡−⎥
⎦
⎤⎢
⎣
⎡=⎥
⎦
⎤⎢
⎣
⎡
A
A
A A
A
I
V
DC
B A
I
V
2
2
1
1. a)
⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
B
B
B B
B
I
V
DC
B A
I
V
2
2
1
1. b)
Conectando ambos cuadripolos en cascada:
AV 1
A I 1
V 2
I 2
BV 1
I 1
BV 2
B I 2
AV 1
I 1
AV 2
A I 2
BV 1
I 1
BV 2 B I 2
1V 1 I
2V
2 I

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 169/424
168
Figura c). Cuadripolo equivalente
Debemos demostrar que la matriz del cuadripolo equivalente vale:
[ ] [ ] [ ] B Aeq γ γ γ += donde se cumple: ⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
2
1
1.
I
V
DC
B A
I
V
eq
Para ello del circuito de interconexión en cascada, vemos que:
V2 = V2B ; I2 = I2B ; V1B = V2A y I1B = -I2A
[ ] ⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡−
=∴2
2
2
2 . I
V
DC
B A
I
V
B A
A Bγ d)
Reemplazando esto último en la Ec. a) del cuadripolo A, nos queda:
[ ] ⎥⎦
⎤
⎢⎣
⎡
−⎥⎦
⎤
⎢⎣
⎡
⎥⎦
⎤
⎢⎣
⎡=
⎥⎦
⎤
⎢⎣
⎡=∴
2
2
1
1 .. I
V
DC
B A
DC
B A
I
V
B A A
A
Aγ e)
Del circuito de interconexión en cascada se deduce:
V1A = V1 y I1A = I1
Reemplazando en e)
[ ] [ ] ⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡
2
2
1
1 .. I
V
I
V B A γ γ
Esta última expresión, coincide con la c) del cuadripolo equivalente:
[ ] [ ] [ ] B Aeq γ γ γ .=∴

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 170/424
169
Ejemplo 5: Suponiendo que el circuito de la Fig. 16 fuera un circuito muy complejo; queremos
hallar la matriz [ ]γ subdividiendo el circuito en dos o más cuadripolos.
Para la solución suponemos que el cuadripolo dado esta formado por la interconexión en cascada
de tres circuitos simples como se indica en la Fig. 16. b)Comenzaremos por hallar la matriz [ ]1γ del primer circuito.
Circuito 1 Separamos en dos el análisis de este circuito.
a) Dejando en vacío la salida (I2 = 0), calculamos los parámetros A y C.
2
1
V
V A = Como V1 = V2 ∴ es A = 1 ;
2
1
V
I C = Como I1 = 0 ∴ es C = 0
b) Cortocircuitando la salida (V2 = 0), calculamos los parámetros B y D.
2
1
I
V B =− Como V1 = I1.z1, pero I1 = -I2 ∴ V1 = -I2.z1 ∴ V1/I2 = -B = -z1 ∴ B = z1
2
1
I
I D =− Como I1 = -I2, entonces -D = -1 ∴ D = 1
Luego [ ] ⎥⎦
⎤⎢⎣
⎡=
10
1 11
z γ
I1
V1
- -
++ z1
I2
V2
V1
z3
z2
b)
I1
V1
-
V2
-
++ z1
I2
z3
z2
I1
-
[γ]2
-
++z1 I2
[γ]1 [γ]3
V2 ≡
Fig.16a)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 171/424
170
Circuito 2. Como en el caso anterior, separamos en dos el análisis de este circuito.
a) Dejando en vacío la salida (I2 = 0), calculamos los parámetros A y C.
2
1
V
V A = Como V1 = V2 ∴ es A = 1 ;
2
1
V
I C = Como V2 = I1.z2 ∴ es C = 1/z2
b) Cortocircuitando la salida (V2 = 0), calculamos los parámetros B y D.
2
1
I
V B =− Como V1 = 0, es B = 0 ;
2
1
I
I D =− pero I1 = -I2 ∴-D = -1 ∴ es D = 1
Luego [ ]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡= 1
101
22
z
γ
Circuito 3
Por ser igual al circuito 1, ya que lo único que cambia es z1 por z3.
Por lo tanto podemos escribir la matriz [ ]3γ directamente
[ ] ⎥⎦
⎤⎢⎣
⎡=
10
1 33
z γ
Luego la matriz total se obtiene como producto de las tres matrices
[ ] [ ] [ ] [ ] ⎥⎦
⎤⎢⎣
⎡
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡⎥⎦
⎤⎢⎣
⎡==∴
10
1.
11
01.
10
1.. 3
2
1321
z
z
z eq γ γ γ γ
Finalmente: [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
⎟ ⎠ ⎞⎜
⎝ ⎛ ++⎟
⎠ ⎞⎜
⎝ ⎛ +
=
23
2
32
11
21
11
.11
z z
z
z z
z z
z z
eqγ
Este resultado se puede generalizar para cualquier número de cuadripolo conectados en cascada,
siendo el parámetro matricial de transmisión general para los cuadripolos en cascada,
sencillamente, el producto matricial de las matrices de transmisión de cada uno de los
cuadripolos que están interconectados en cascada.-
z2
I1
V1
- -
+
I2
V2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 172/424
171
Relaciones entre conjuntos de parámetros
Al introducir los seis grupos de parámetros en las secciones anteriores de este capítulo, se
sugirieron aplicaciones para cada grupo de parámetros.
Sin embargo, no se puede decir que todos los problemas con transistores se resuelven utilizando
los parámetros h y con frecuencia se hace necesario, convertir un grupo de parámetros en otro.
Hay cuadripolos en que deseamos conocer los parámetros de admitancias, pero que por su
configuración circuital es más sencillo y rápido obtener por impedancias, entonces en ese caso
se hace luego la conversión.
Es intención en esta sección demostrar la equivalencia entre alguno de los parámetros, dejando el
resto para el alumno.
a) Relación, entre [z] e [y]
Empezamos por escribir los sistemas de Ecs. [2] y [3] en forma matricial
[ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
1
2
1. I
I z
V
V [16]
[ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
1
2
1.
V
V y
I
I [17]
Invirtiendo matricialmente la Ec [17] resulta:
[ ] ⎥⎦
⎤⎢⎣
⎡⋅=⎥
⎦
⎤⎢⎣
⎡ −
2
11
2
1
I
I y
V
V [18]
Donde [ ] 1− y es la llamada matriz inversa.
De la comparación de la Ec. [18] con la Ec. [16] surge que:
[ ] [ ]1−
= y z [19]
Donde la matriz inversa se construye como se indica en el apéndice 1.
Por lo tanto:
[ ]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ΔΔ−
Δ−
Δ=−
y
y
y
y
y
y
y
y
y1121
1222
1
;
;
[20]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 173/424
172
Donde ΔY es el determinante de la matriz admitancia, es decir
Δy = y11.y22 - y12.y21
Teniendo en cuenta la Ec. [20], la igualad indicada por la Ec. [19] puede escribirse como:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ΔΔ−
Δ−
Δ=⎥
⎦
⎤⎢⎣
⎡
y
y
y
y
y
y
y
y
z z
z z
1121
1222
2221
1211
;
;
;
; [21]
O sea que:
y
y z
y
y z
y
y z
y
y z
Δ=
Δ−=
Δ−=
Δ= 11
2221
2112
1222
11 ;;; [22]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 174/424
173
Apéndice I
Inversión de matrices:
Definición: cuando se cumple [z].[y] = 1; es decir que el producto de dos matrices es igual a la
matriz unidad, se dice que [y] es la matriz inversa de [z] es decir:
[y] = [z]-1 Vale la reciproca, es decir que:
[z] = [y]-1
Por lo tanto dada una matriz [z] cuadrada, la determinación de su inversa [z]-1 se construye de
acuerdo a la siguiente regla:
1) Se halla la matriz transpuesta de [z], es decir se cambia fila por columna formando la matriz
[z]t 2) Se halla la matriz de los cofactores de la [z]t, es decir cada elemento zij de [z]t se remplaza por
su menor complementario.
3) Cada elemento de la matriz así formada se divide por el determinante Δ de la matriz [z].
4) Se multiplica alternadamente cada elemento por +1 y -1 comenzando por z11
Sea la matriz
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
333231
232221
131211
;;
;;;;
z z z
z z z z z z
z
Siguiendo los pasos indicado en el párrafo anterior:
1)
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
332313
322212
312111
;;
;;
;;
z z z
z z z
z z z
z t
2) Matriz de cofactores [z]c
[ ]
332313
322212
312111
;;
;;
;;
z z z
z z z
z z z
z c
ΔΔΔ
ΔΔΔ
ΔΔΔ
=
Siendo cada Δz al menor complementario, por Ejemplo.
Δ z13= z21.z 32 -Z22.Z31

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 175/424
174
3) Se divide a [z]c por el determinante de [z]
[ ]
Δ
Δ
Δ
Δ
Δ
ΔΔ
Δ
Δ
Δ
Δ
ΔΔ
Δ
Δ
Δ
Δ
Δ
=Δ
332313
322212
312111
;;
;;
;;
z z z
z z z
z z z
z c
Siendo:
2322
131231
3332
131221
3332
232211 ;
;).(
;
;).(
;
;).(
z z
z z z
z z
z z z
z z
z z z +−=Δ
4) La matriz inversa finalmente es:
[ ]
Δ
Δ
Δ
Δ−
Δ
ΔΔ
Δ−
Δ
Δ
Δ
Δ−
Δ
Δ
Δ
Δ−
Δ
Δ
=−
332313
322212
312111
1
;;
;;
;;
z z z
z z z
z z z
z
Ejemplo: Sea
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−−−
=⇒
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡⇒⇒
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
121
101
167
343
432
111
341
431
321
cofactoresndotransponie
Δ = -2
Luego la inversa es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−
−
=⇒
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
−
2112
1210212
12
62
7
2112
121021
21
26
27
finalmente

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 176/424
175
b) Relación entre [Y] y [Z]
De la Ec. [19] se puede escribir que:
[y].[z] = 1 por lo tanto [y] = [z] -1 [23]
Luego al igual que la demostración anterior podemos establecer que:
z
z
z
z
z
z
z
z
y y
y y
ΔΔ−
Δ−
Δ=⎥⎦
⎤⎢⎣
⎡
1121
1222
2221
1211
;
;
;
;
Siendo Δ z =z11 .z22 - z12. z21
De donde se puede escribir que:
z
z y
z
z y
z
z Y
z
z y
Δ=
Δ−=
Δ−=
Δ= 11
2221
2112
1222
11 ;;; [24]
Veamos un Ejemplo:
Sea el cuadripolo en “T” de la Fig y queremos a partir de los parámetros z hallar la matriz [y]
Luego a partir de la matriz [z] debemos hallar la inversa [z]-1= [y]
1) Hallamos la traspuesta
[ ] ⎥⎦
⎤⎢⎣
⎡=
z z
z z z t 2
2
2) Hallamos la matriz de los cofactores
[ ] ⎥⎦
⎤⎢⎣
⎡=
z z
z z z c 2
2
3) Dividimos por Δz
[ ] [ ]
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
Δ⇒
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
Δ z z
z z z
z
z z
z z
z z
z z
z
z cc
32
31
31
32
32
3
332
22
22
z
z
I1
V1
- -
++
z I2
V2 [ ]222 34
2
2
z z z z
z z
z z z
=−=Δ
⎥⎦
⎤
⎢⎣
⎡=
[1]→

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 177/424
176
4) Cambiando de signo obtenemos la inversa.
[ ] [ ]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−
−==−
z z
z z y z
32
31
31
32
1 [2]
Luego dibujando el circuito asociado a la matriz de admitancias [2].
Obtenemos así un cuadripolo “π” que es “equivalente” al cuadripolo “T“.
Para ello veamos la definición de:
Equivalencia de cuadripolos:
“Se dice que dos cuadripolos son equivalentes cuando las matrices características de una cierta
familia de parámetros, tienen el mismo valor para ambos cuadripolos”.
Esta definición se aplica perfectamente a nuestro ejemplo puesto que si del cuadripolo “π”
obtenemos la matriz de parámetros de impedancia veremos que es igual a la matriz [1].
Podemos decir entonces que ambos cuadripolos son equivalentes.
c) Relación entre [γ] y [z]
Habíamos visto en la definición de parámetros [γ] que:
02
1
212102
1
22
;1
;1
;
==
=−==−=
V I I
I D
Z
C
Y
B
V
V A
También vimos cuando definimos los parámetros [z] que:
01
221
01
111
22 ==
== I I
I
V z y
I
V z
Luego asiendo el cociente
z .3
1
I1
V1
- -
++
I2
V2
z .3
1 z .3
1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 178/424
177
AV
V
I V
I V
z
z
I I
====
=02
1
012
11
21
11
22
Calcularemos –B.
Vemos que –B = 1/y21, por lo tanto reemplazando y21 en función de los parámetros [z] dado por la fórmula [24]
212121
1
z
z B
z
z
y B
Δ=⇒
Δ−==−
En cuanto a C vemos que en forma directa es igual a la inversa de z21
Por último para hallar D en función de los parámetros [z] es conveniente hallarlo primero en
función de las [y] y luego pasarlo a las [z]
Habíamos visto que
01
221
01
111
22
.==
==V V
V
I yque y
V
I y
21
22
21
22
02
1
01
2
1
1
21
11
/
/
2
2
z
z D
z z
z z D
I
I
V
I
V
I
y
y
V
V
=∴Δ−
Δ=−===∴
=
=
Resumiendo nos queda
21
22
212121
11 ;1
;; z
z D
z C
z
z B
z
z A ==
Δ== [25]
Finalmente en una forma enteramente similar a lo visto hasta ahora, pueden encontrarse las
relaciones faltantes entre los parámetros correspondientes a las distintas matrices.
En la tabla I se muestran las equivalencias entre todos los parámetros

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 179/424
178
Información suministrada por los parámetros
En el supuesto que de un cuadripolo se conozca su matriz de parámetros y no su configuración
circuital, vamos a ver que a través de ello, puede obtenerse una información cualitativa respecto
del comportamiento del mismo.
Se analizan los casos en base a los parámetros de impedancia, deduciéndose el resto en base la
tabla I de equivalencia entre parámetros.
a) Los dos parámetros de transferencia son nulos o más genéricamente, si los parámetros
ubicados simétricamente respecto a la diagonal principal son nulos:
02112 == z z
En este caso podemos afirmar que no hay efecto de la salida sobre la entrada y viceversa no hay
efecto de la entrada sobre la salida.
Lo anterior indica que los circuitos de entrada y salida son independientes entre si.
Para los otros parámetros
[ ] 0..
0
0
0
2112
2112
2112
=−=
==
==
==
DC B A
g g
hh
y y
γ
b) Los parámetros de transferencia son solo nulos en un sentido, ó los parámetros simétricosrespecto de la diagonal principal son sólo nulos en un sentido
z12 = 0 pero z21 ≠0
ó z21 = 0 pero z12 ≠ 0
En el caso por ejemplo en que z12 = 0 pero z21 ≠0, quiere decir que no hay efecto de la salida
sobre la entrada pero si hay efecto de la entrada sobre la salida.
Hay una regla que establece que, el primer subíndice indica los terminales sobre el que se produce el efecto y el segundo la causa (recordemos que subíndice 1 son los bornes de entrada y
el 2 los de salida, por convención).
En definitiva cuando uno de los parámetros de transferencia es nulo y el otro no, entonces existe
transferencia de energía en un solo sentido, y el cuadripolo se comporta como “unilateral”.
Para los otros parámetros
y12 = 0 pero y21 ≠ 0 o la reciprocah
12= 0 pero h
21 ≠ 0 o la reciproca
g12 = 0 pero g 21 ≠ 0 o la reciproca

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 180/424
179
c) Los parámetros de transferencia son iguales entre si y distinto de cero.
z12 = z21 ≠0
En este caso podemos afirmar que el cuadripolo es “pasivo” y además, que la transferencia de
energía se realiza con igual facilidad en ambos sentido, o sea el cuadripolo se comporta como
“bilateral”
Para los otros parámetros
y12 = y21 ≠ 0h12 = - h21≠ 0g12 = - g21 ≠ 0[γ] = A.B – C.D =1
d) los parámetros de transferencia son distintos entre si y no nulos
z12≠ z21≠ 0
Esto significa que existe un elemento activo o sea algún generador controlado o sea el cuadripolo
es “activo”.
Para los otros parámetros
y12≠ y21 ≠ 0h12≠ - h21≠ 0g12≠ - g21 ≠ 0
[γ] ≠ 1
e) Condición de simetría
Habíamos dicho que un cuadripolo es simétrico cuando la impedancia de entrada es igual a la de
salida, estando el cuadripolo en vacío en ambos extremo.
Escribiendo estos en términos de impedancia es:
z11 = z22
Luego utilizando la tabla I de equivalencia de cuadripolos, obtenemos la condición de simetría para los otros parámetros
221111
22
2211
y y
z
z y
z
z y
=∴
⎪⎪⎭
⎪⎪⎬
⎫
Δ=
Δ=
122
11 =Δ∴=Δ h z
z h

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 181/424
180
111
22 =Δ∴=Δ g z
z g
D A
z z D
z
z A
=∴
⎪⎪⎭
⎪⎪⎬
⎫
=
=
21
22
21
11
Para finalizar podemos decir que si estas últimas condiciones no se cumplen estamos en el caso
de cuadripolo “asimétrico”.
En la tabla II se hace un cuadro en el que se expresan los diferentes valores que adoptan cada
parámetro para que el cuadripolo sea simétrico y pasivo.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 182/424
181
TABLA I: CONVERCIÓN DE PARÁMETROS
[Z] [Y] [γ] [γ'] [h] [g]
[Z]
z11 z12
z21 z22
y
y
Δ22
y
y
Δ− 12
y
y
Δ− 21
y
y
Δ11
C
A
C
γ Δ
C
1 C
D
'
'
C
D
'
1
C
''
C
γ Δ ''
C
A
22h
hΔ
22
12
h
h
22
21
h
h−
22
1h
11
1
g
11
12
g
g −
11
21
g
g
11 g
g Δ
[Y] z
z
Δ22
z
z
Δ− 12
z
z
Δ− 21
z
z
Δ11
y11 y12
y21 y22
B
D
B
γ Δ−
B
1−
B
A
'
'
B
A -
'
1
B
'
'
B
γ Δ−
'
'
B
D
11
1
h
11
12
h
h−
11
21
h
h
11h
hΔ
22 g
g Δ
22
12
g
g
22
21
g
g −
22
1
g
[γ]
21
11
z
z 21 z
z Δ
21
1
z
21
22 z z
21
22
y
y− 21
1
y
−
21 y
yΔ− 21
11 y y−
A B
C D
'
'
γ Δ D
'
'
γ Δ B
''
γ ΔC
''
γ Δ A
21h
hΔ− 21
11
h
h−
21
22hh−
21
1h−
21
1
g
21
22
g
g
21
11 g g
21 g g Δ
[γ']12
22
z
z 21 z
z Δ
12
1
z
12
11
z
z 12
11
y
y− 12
1
y
−
12 y
yΔ− 12
22
y
y− γ Δ
D γ Δ
B
γ ΔC
γ Δ A
A’ B’
C’ D’
12
1
h
12
11
h
h
12
22
h
h 12h
hΔ
12 g
g Δ− 12
22
g
g −
12
11
g
g − 12
1
g
−
[h] 22
z
Δz 22
12
z
z
22
21
z
z − 22
1
z
11
1
y
11
12
y
y−
11
21
y
y 11 y
yΔ D
B
D
γ Δ
D
1−
D
C '
'
A
B
'
1
'
'γ Δ− '
'
A
C
11h 12h
21h 22h g
g
Δ
22
g
g
Δ
− 12
g
g
Δ
− 21 g
g
Δ11
[g]11
1
z
11
12
z
z −
11
21
z
z 11 z
z Δ 22 y
yΔ 22
12
y
y
22
21
y
y− 22
1
y
C A
γ Δ−
A
1 A
B '
'
D
C '
1
D
−
'
'
D
γ Δ '
'
D
B h
h
Δ22
h
h
Δ
− 12
h
h
Δ
− 21 h
h
Δ11
11 g 12 g
21 g 22 g
TABLA II: CONDICONES DE PASIVIDAD Y SIMETRIA
ParámetrosCondición paracuadripolos pasivos
Condición para cuadripolos simétricos
z z12 = z21 z11 = z22
y y12 = y21 y11 = y22
ABCD A.D-B.C = 1 A = D
A’B’C’D’ A’.D’-B’C’ = 1 A’ = D’
h h12 = -h21 Δh = 1
g g12 = -g21 Δg = 1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 183/424
182
Interconexión de cuadripolos
Ya se analizó la interconexión en cascada o tándem de cuadripolos cuando se trató los
parámetros de transmisión.
Existen otras formas útiles, de interconectar cuadripolos, denominada en paralelo o en serie.
Los parámetros de admitancia y de impedancia son los que sirven para representar cuadripolos
en paralelos y en serie respectivamente, como se verá a continuación.
Interconexión en paralelo
Considérense por ejemplo dos cuadripolos A y B conectados en paralelo, tal como se indica en la
Fig. 17
El problema consiste en encontrar la matriz del cuadripolo equivalente, marcado con línea de
punto, a partir de las matrices de los cuadripolo Ay B
Puesto que las tensiones a la entrada y salida son las mismas para ambos cuadripolos
interconectados y las corrientes totales de entrada y salida son iguales a la suma de las corrientes
parciales de entrada y salida, respectivamente o sea:
V1A = V1B =V1 ; I1 = I1A +I1B[26]
V2A = V2B =V2 ; I2 = I2A +I2B
Además en cada cuadripolo se cumple:
En el cuadripolo A En el cuadripolo B
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
A
A
A A
A
V
V
y y
y y
I
I
2
1
2221
1211
2
1 .;
; ⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
B
B
B B
B
V
V
y y
y y
I
I
2
1
2221
1211
2
1 .
A
B
V2A
V2B
I2A
I2B
V1A
V1B
V2
I2
V1
I1
I1A
I1B
Fig.17

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 184/424
183
Luego en base a las Ec. [26]
⎥⎦
⎤⎢⎣
⎡⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
+=⎥
⎦
⎤⎢⎣
⎡
2
1
2221
1211
2221
1211
22
11
2
1 .;
;
;
;
V
V
y y
y y
y y
y y
I I
I I
I
I
B A B A
B A
Por ser
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
1
2
1
2
1
V
V
V
V
V
V
B
B
A
A
Por consiguiente, cuando se conectan dos cuadripolos en paralelo, la matriz de admitancias del
cuadripolo equivalente, es la suma de las matrices de admitancia de cada cuadripolo.
La expresión se puede generalizar para el paralelo de n cuadripolos, que además, pueden ser
activos o pasivos.
Luego
[ ] [ ] [ ] B A y y y += [27]
Al proponer que los dos cuadripolos se conecten en paralelo se supone que al efectuar la
conexión no se altera la naturaleza de los cudripolos propiamente dichos.
Esto no será siempre así, como vemos en la Fig. 18.
En este caso el cuadripolo “T” elimina a la resistencia mas baja del cuadripolo celosía, que en
esta forma queda alterado.Por lo tanto, no siempre puede conectarse dos cuadripolos en paralelo en forma directa.
+
R
V2
V1
Fig.18
RR
R
RR
R
-
+
-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 185/424
184
Permisibilidad de interconexión
Veremos a continuación en que condiciones pueden interconectarse dos cuadripolos sin que se
perturben sus relaciones individuales a causa de la conexión.
Para la conexión en paralelo, consideremos la Fig. 19.
Se conecta en paralelos un par de terminales, mientras los otros pares de terminales se
cortocircuitan individualmente.
Se emplean los cortocircuitos porque los parámetros que caracterizan a los cuadripolos
individuales y el equivalente son los parámetros de admitancia en cortocircuito.
Si no es nula la tensión V indicada en la Fig. 19, cundo se conectan normalmente los segundos
terminales habrá una corriente circulante, tal como sugiere el esquema.
En este caso deja de ser cierta la Ec [26].
En efecto, a causa de la corriente circulatoria, en cada par de terminales no se cumple que lacorriente que entra en un terminal es igual a la que sale por el otro terminal, cuya condición se
había supuesto implícitamente al establecer las ecuaciones individuales de los cudripolos
La condición necesaria y suficiente para que la corriente circulatoria sea nula es que la tensión V
de la Fig. 19 sea nula.
En el caso particular de los cudripolos de la Fig. 18 esa tensión V =V1/2 ó V =V2/2
Cuando se determina que no puede efectuarse la interconexión porque se introduce corrientes
circulantes, existe una manera de detener dichas corrientes y, por tanto, permitir que se efectúe la
conexión, y que sigan vigentes las ecuaciones hallados anteriormente.
El método consiste simplemente en colocar un transformador ideal aislante de relación 1:1 en
los terminales de salida de uno de los cuadripolos, como se indica en la Fig. 20
A
B
Fig. 19. circuitos de prueba de conexión en paralelo
A
B
-
+
V+
-V

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 186/424
185
Existe un caso especial que se presenta cuando todos los cuadripolos que se van a conectar en
paralelo tiene una tierra común como sucede en la Fig. 21.
En este caso no se requiere el uso del transformador ideal
Para ilustrar lo visto hasta aquí veremos un Ejemplo.
Ejemplo 6: En el circuito doble T puenteado de la Fig. 21, muy utilizado como filtro de
escalonamiento, se desea calcular el parámetro de admitancia Y11 de dicho cuadripolo.
Para la obtención de estos parámetros se puede considerar a este circuito como la interconexión
en paralelo de dos cuadripolos A y B como se indica en la Fig. 22.
Por lo tanto, cebemos calcular las admitancias de entrada de estos dos cuadripolos
individualmente y con la salida de ambos en cortocircuito (V2
= 0)
I1
Fig. 21 Filtro doble T puenteado
Ra
R 1 Ca
C1
Rb
C2
V1
+
-
+
-
V2
I2
A
B
Fig. 21. Caso particular de conexión común a tierra entre los cuadripolos A y B.
Fig.20 El paralelo de estos cuadripolos se describe por medio de las Ecs. [26] y [27].
-
+ A
B
V2A
V2B
I2A
I2B
V1A
V1B
V2
I2
V1
I1 I1A
I1B
I1 I2
+
-
+
+
-
-+
+ -
-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 187/424
186
Luego
A z A
y
1
111 =
∴
( ) 11
11
1
211
11212
12
1
11
++
+=
++
=C C pR
pC RC C p
R pC
pC
y A
( )babaa
ba
ba
a
B R R R R pC
R pC
R pC
R
y++
+=
++
=1
11
111
De donde la admitancia de entrada total será
( ) 1211
11212
111111 ++
+=+=
C C pR
pC RC C p y y y B A +
( )babaa
ba
R R R R pC
R pC
++
+ 1
Se puede hacer lo mismo para calcular el resto de los parámetros
Interconexión serie
Considérese dos cuadripolos A y B conectados en serie como indica la Fig.23.
Lo mismo que en la interconexión paralelo que vimos anteriormente aquí el problema consiste
-
A
B
V2A
V2B
I2A
I2B
V1A
V1B
V2
V1
I1 I1A
I1B
Fig.23 interconexión de dos cuadripolo en serie
+
-
+
I2
A
BV2V1
I1
Fig. 22 Circuito topológica mente equivalente al de la Fig. 21
R 1
R b
I2
+
-
-
+
Ca
C2C1
Ra

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 188/424
187
en encontrar la matriz de cuadripolo equivalente marcado con líneas de puntos, a partir de las
matrices de los cuadripolos A y B.
Puesto que las corrientes en la entrada y salida son los mismos para ambos cuadripolos
interconectados, (por estar en serie), y la tensión total de entrada y salida son iguales a la suma
de las tensiones parciales de entrada y salida respectivamente, podemos escribir
I1= I1A = I1B ; V1= V1A +V1B
[28]I2= I2A = I2B ; V2= V2A +V2B
Además en cada cuadripolo se cumple que:
En el cuadripolo A En el cuadripolo B
⎥⎦⎤⎢
⎣⎡⎥
⎦⎤⎢
⎣⎡=⎥
⎦⎤⎢
⎣⎡
A
A
A A
A I I
z z z z
V V
21
22211211
21 .
;; ⎥
⎦⎤⎢
⎣⎡⎥
⎦⎤⎢
⎣⎡=⎥
⎦⎤⎢
⎣⎡
B
B
B B
B I I
z z z z
V V
21
22211211
21 .
;,
Por otra parte es:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
1
2
1
2
1
I
I
I
I
I
I
B
B
A
A
Luego en base a la Ec [28]
⎥⎦
⎤
⎢⎣
⎡
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
+=+
+
= 2
1
2221
1211
2221
1211
22
11
2
1
.;
;
;
;
I
I
z z
z z
Z z
Z z
V V
V V
V
V
B A B A
B A
Por consiguiente, cuando se conectan dos cuadripolos en serie, la matriz de impedancia del
cuadripolo equivalente, es la suma de las matrices de impedancias de cada cuadripolo
[ ] [ ] [ ] B A z z z += [29]
La expresión [29] se puede generalizar para n cuadripolos conectados en serie.
Para el caso de la interconexión en serie, consideramos la Fig. 24
A
B
V
Fig. 24 Circuito de prueba de interconexión serie
+
-
A
B
V
+
-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 189/424
188
En este caso se conectan en serie dos pares de terminales, mientras se dejan abiertos los otros dos
pares de terminales.
Se emplean los circuitos abiertos porque los parámetros que caracterizan a los cuadripolos
individuales y al total equivalente son los parámetros de impedancia en circuito abierto.
Si no es nula la tensión V, cuando se conectan normalmente los segundos pares de terminaleshabrá una corriente circulante, tal como sugiere el esquema.
Al igual que en la conexión paralelo, la condición necesaria y suficiente para que la corriente
circulatoria sea nula, es que la tensión V, sea nula.
Al igual que el caso de interconexión paralelo, cundo se descubre que no puede efectuarse la
interconexión porque se produce una corriente circulatoria interna, la solución es colocar un
transformador ideal aislante de relación 1:1 en los terminales de salida de uno de los cuadripolos
como se indica en la Fig. 25.
Con esta solución, por lo tanto se podrá seguir aplicando las relaciones dada por las Ecs [28] y
[29].
También se suele utilizar la conexión de dos transformadores ideales de relación 1:1 uno en cada
salida de cada cuadripolo
A
B
Fig.25
1:1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 190/424
189
Interconexión de cuadripolos en serie-paralelo y paralelo-serie
Así como una de la utilidades de los parámetros y, z , es el estudio de las conexiones de
cuadripolos en paralelo y en serie, respectivamente, las matrices [h] y [g] son muy adecuados
para la representación de cuadripolos formados por la conexión de otros, más sencillos, en serie
– paralelo y paralelo – serie, de acuerdo con los esquema de la Fig. 26 a) y b), a condición de
que la corriente circulatoria sea nula.
En el circuito de la Fig. 26 a) si la corriente circulatoria es nula se cumple que:
B A
B A
I I I
V V V
222
111
+=
+= ;
B A
B A
V V V
I I I
222
111
==
== [30]
Además en cada cuadripolo se cumple que:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
B
B
B B
B
A
A
A A
A
V
I
hh
hh
I
V y
V
I
hh
hh
I
V
2
1
2221
1211
2
1
2
1
2221
1211
2
1 .;
;...
;
;
Por otra parte por las Ecs [30]
⎥⎦
⎤
⎢⎣
⎡
== B
B
A
A
V
I
V
I
V
I
2
1
2
1
2
1
Luego en base a las relaciones [30] obtenemos
2
1
2221
1211
2221
1211
22
11
2
1 .;
;
;
;
V
I
hh
hh
hh
hh
I I
V V
I
V
B A B A
B A
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=
+
+=
Lo que expresa que en la conexión serie- paralelo de cuadripolos, la matriz total [h] del
cuadripolo equivalente, es la suma de las matrices de los parámetros h de cada cuadripolo
individual.
A
B
Fig.26-a) Conexión en serie-paralelo b) Conexión paralelo-
A
B-
+
V1
V2A
I2AI1
+
-
V2
V2B
I2BI1B
V1B
V1A
I1A
I2I1
V2 V1
V1B
I1B
I1A
V2A
V2B
I2B
I2A
+
-
+
-
V1A
I2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 191/424
190
O sea:[h] = [h]A + [h]B [31]
De la misma forma se demuestra que en la interconexión en paralelo- serie, representada en la
Fig. 26-b), la matriz [g] del cuadripolo equivalente es la suma de las matrices [g] de los
cuadripolos individuales o sea
2
1
2221
1211
2221
1211
2
1 .;
;
;
;
I
V
g g
g g
g g
g g
V
I
B A⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +=
Siempre con la condición de que la corriente circulatoria sea nula.
La permisibilidad de la interconexión para ambos casos consiste en realizar las pruebas de las
conexiones en serie y en paralelo, siguiendo el método descripto en relación con las Fig. 19 y 24.
Lo mismo que en esos casos, la corriente circulatoria puede suprimirse, en última instancia,intercalando un transformador ideal, de relación 1:1
En la tabla III, se resumen en forma tabulada las diferentes conexiones y la relación entre sus
matrices, con la inclusión de la conexión en cascada que se estudio con los parámetros de
transmisión.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 192/424
191
TABLA III: INTERCONEXION DE CUADRIPOLOS
Tipos de conexión Esquema general Relación entre matrices
Paralelo [y] = [y]A + [y]B
Serie [z] = [z]A
+ [z]
B
Serie-Paralelo [h] = [h]A + [h]B
Paralelo-Serie [g] = [g]A + [g]B
Cascada [γ] = [γ]A . [γ]B A B
A
B
A
B
A
B
A
B

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 193/424
192
Cuadripolos pasivos y simétricos especiales
Redes iterativas
En la ingeniería en telecomunicaciones se utilizan mucha veces redes que consisten en circuitos
iterativos, es decir, en un cierto número de etapas pasivas, simétricas e idénticas, conectadas en
cascadas entre un generador y una carga, tal como se representa en la Fig. 27
Como ejemplos típicos de estas redes pueden citarse líneas de transmisión de energía, artificiales
y filtro de ondas.
Para una terminación dada, Zi, de la red, es posible calcular las tensiones y corrientes en
cualquier empalme de la cascada por aplicación de las ecuaciones generales de circuitos, pero
este procedimiento puede resultar muy laborioso.Por ejemplo, si en la red de la Fig. 27 hay 20 secciones, habría que escribir y resolver 21
ecuaciones simultánea para calcular una cualquiera de las corrientes.
El trabajo se simplifica considerablemente si todas las células que componen la red son idénticas
y Zi es su “impedancia característica o iterativa”.
Redes pasivas y simétricas
Recordemos de la tabla II que en todo cuadripolo simétrico y pasivo se cumplen las relaciones
z12 = z21 Por ser pasivosz11 = z22 Por ser simétricos
Para los parámetros de trasmisión se verifica:
A.D – B.C = 1 Por ser pasivoA = D Por ser simétrico
I1
Vg
Fig. 27. Red iterativa
I0
Zg
1 2 i-1 i
I2 Ii-2 Ii-1 Ii
ZiV1 V2 Vi-1Vi-2 ViV0
+

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 194/424
193
Podemos ahora definir la:
Impedancia característica
Es el valor de la impedancia que colocada a la salida, refleja a la
entrada el mismo valor.-
Es decir colocando ese valor Z0 como impedancia de carga, el mismo valor se ve a la entrada,
como si el cuadripolo no existiera.
Como el cuadripolo es simétrico, lo mismo vale colocando Z0 en la entrada.
Si a la red iterativa de la Fig.27, se la termina en su impedancia característica, (Zi =Z0), ésta
misma impedancia aparece a la entrada de todas las células, incluyendo la primera, y por lo tanto
a la entrada de la red iterativa.
Si además de que la impedancia de carga valga Z0, tiene ese mismo valor la impedancia interna
del generador (Zg = Z0), se dice que toda la red esta en condiciones de adaptación, con la
impedancia característica.
La impedancia característica Z0 puede calcularse fácilmente (a partir de su definición), en
función de cualquiera de la familia de parámetros que vimos anteriormente.
Para ello escribimos la expresión de la impedancia de entrada Ze, en función de los parámetros de
trasmisión ABCD, para cualquier condición de carga:
Del cuadripolo de la Fig. 29 es
1
1
I
V Z e =
Además en el cuadripolo se cumple:
)(
)(
221
221
I DCV I
I V AV V
−+=
−+=
CuadripoloPasivo ySimétrico
Fig.28 Definición de impedancia característica o iterativa
I1 I2
V2Z0Z0V1
-
+ +
-
I2
zL
I1
+
-
V1
V2
+
-
Fig. 29

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 195/424
194
Haciendo el cociente de estas dos ecuaciones
D I
V C
B I
V A
I DCV
I V AV z
I
V e
+−
+−
=−+−+
==
2
2
2
2
22
22
1
1
)(
)(
De la Fig. 29 vemos que si cargamos al cuadripolo con zL es:
2
2
I
V z L −=
y reemplazando en la ecuación de arriba:
DCz
B Az z
L
Le +
+=∴
Si ahora suponemos el cuadripolo cargado con Z0, la impedancia de entrada por definición tiene
que ser Z0
B Az DCz z DCz
B Az z +=+⇒
++
= 0000
00 )(
B Az Dz Cz +=+ 002
0
Por ser simétrico es A = D
C B z =∴ 0 [32]
Expresaremos z0 en función de los parámetros z e y.
Para ello trabajamos con la tabla II de equivalencias.
11
111111 .
.
/
/;
y
z
C D
B A
B D
C A z
C
A y
B
D==∴==
Por ser el cuadripolo simétrico A = D; z11 = z22 e y11 = y22
22
22
11
110
y
z
y
z z ==∴ [33]
Definiendo
z11 = “Impedancia de entrada, en circuito abierto = zeca
y11 = “Inversa de la impedancia de entrada, en cortocircuito =ecc Z
1
La Ec. [33] Se convierte en:ecceca z z z .0 = [34]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 196/424
195
Esta fórmula es sumamente útil, por la facilidad con que pueden medirse las cantidades zeca y zecc
y nos expresa que en todo cuadripolo pasivo y simétrico, la impedancia característica es igual a
la media geométrica entre la impedancia de entrada a circuito abierto y en cortocircuito
Ejemplo 7: En el siguiente cuadripolo calcular la impedancia característica
ecceca z z z .0 =
C j
LC
C j
L j z eca
ω
ω
ω
ω 211 −
=+=
Por otra parte:( )( )
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+−=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
−+=
−+=
++=
LC
LC L j
LC
LC L j z
LC L j
LC
L j L j
C j L j
C j L j L j z
ecc
ecc
2
2
2
2
22
1
2.
1
11.
1
11.
11/1.
ω
ω ω
ω
ω ω
ω ω
ω
ω ω
ω ω
ω ω ω
( ) LC C
L z L j
LC
LC
C j
LC z 2
02
22
0 21
2.
1ω ω
ω
ω
ω
ω −=⇒
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −=∴
De esta última expresión podemos deducir que si la frecuencia es LC /2<ω
la impedancia característica se comporta como una resistencia pura, cuyo valor disminuye si
disminuye ω.
Por el contrario si LC /2>ω entonces:
( ) 02
0 2 L j LC C
L j z ω ω =−= Donde ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
201
ω LC
C
L L
Es decir la impedancia característica se comporta como una reactancia inductiva de inductancia
L0
L L
C

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 197/424
196
Función o constante de propagación
Sea un cudripolo pasivo simétrico y en condiciones de adaptación con su impedancia
característica, del cual se conocen los parámetros ABCD de la matriz [γ]
Definimos la función propagación o constante de propagación en condiciones de adaptación
mediante la relación:
γ −= eV V
1
2 [35]
Siendo γ en general un numero complejo, con parte real y parte imaginaria, y a su vez función de
la frecuencia y se la conoce como “función de propagación”.
En general γ puede expresarse como:
)()()( ω ω ω α γ jB+=
La parte real e imaginaria γ se define como:
α (ω) = función de atenuación
β(ω) = función de fase
A continuación hallaremos la expresión de γ en función de los parámetros de trasmisión por
definiciones es:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+=⇒−+=
2
2
2
1221 ).(.
V
I B A
V
V I BV AV
Pero02
2 1
z V
I =
−
02
1
Z
B Ae
V
V +==∴ γ
Recordando la expresión de z0 dada por la ecuación [32]
C B B Ae
V V
C B z +==∴= γ
210
I2
z0
I1
+
V2
Fig.30. Cuadripolo pasivo simétrico y en condiciones de adaptación
z0V1 [γ]Vg

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 198/424
197
Luego:
BC Ae +=γ
Como el cudripolo es pasivo y simétrico
1. =− BC D A y A=D
12 =−∴ BC A 12 −= A BC Luego
12
2
1 −+== A AeV
V γ [36]
Finalmente
⎟ ⎠ ⎞
⎜⎝ ⎛ −+=+= 1ln 2
)()( A A j ω ω β α γ [37]
Por consiguiente la función de propagación γ puede hallarse conociendo únicamente el
parámetro A.
Volviendo un poco sobre la definición de la función de propagación γ
)()(
1
2 . ω β ω α γ jeeeV
V −−− ==
En base a esta última expresión podemos considerar que la función de propagación γ, es una
medida del efecto que introduce el cuadripolo sobre la señal (V1) que la atraviesa.
En efecto.
1
2)(
V
V e =− ω α
Como vemos el valor de α (ω) da una medida de la atenuación si α es positiva, o de amplificación
si α es negativo introducido por el cuadripolo.
El valor de β (ω), es una medida del cambio de fase, impuesto a la señal (V1)
Entonces podemos expresar que un cuadripolo pasivo y simétrico, cargado con su impedanciacaracterística a la salida y a la entrada, introduce una atenuación dada por α (ω) y un cambio de
fase dado por β (ω) sobre la señal que lo atraviesa.
Como vemos en la Ec [37], ambos efectos quedan determinado por el coeficiente A.
Si en lugar de la relación de tensiones, consideramos la relación de corrientes, en las mismas
condiciones, obtendremos:
D z C I
I D
I
V C
I
I I DV C I +=
−⇒+
−=
−⇒−+=
02
1
2
2
2
1
221..).(.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 199/424
198
Si cambiamos el sentido de la corriente I2 es decir en vez de entrar que salga del cuadripolo nos
queda.
AC B AC
BC D z C
I
I +=+=+= ... 0
2
1 Pero 1. 2 −= AC B
Por pasividad
12
2
1 −+=∴ A A I
I
Comparando esta última expresión con la Ec [36] vemos que:
12
2
1 −+== A Ae I
I γ [38]
Es decir que si se cumplen las condiciones fijadas de simetría y pasividad, la atenuación y elcambio de fase son iguales para corrientes y tensiones.
En una red iterativa, compuesta por células idénticas, como de la Fig. 27, la relación entre las
tensiones de entrada y salida, puede escribirse (lo mismo para las corrientes), de la siguiente
forma:
( ) ( )ω α ω α γ j ji
i
i
i
eeeV
V
V
V
V
V
V
V .............. .1
2
1
1
00 === − [39]
Resultando que la atenuación total de i secciones idénticas y simétricas, conectadas en cascada,es de (i.α) neperios y el correspondiente desplazamiento de fase es de (i.β) radianes.
También puede ocurrir (especialmente en los filtros de ondas compuestos) que se asocien en
cascada, secciones de redes, todas con la misma impedancia característica, pero con distinto
valores de la función de propagación γ, por ejemplo γ1, γ 2…….γ k .
Puesto que también en este caso sigue siendo valida la relación [39], se tiene:
)......( 21 k
ee
γ γ γ γ +++
=
Es decir, la atenuación total es la suma de las atenuaciones parciales y lo mismo con respecto al
defasaje._

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 200/424
199
Determinación de la función de propagación, a partir de la impedancias de cortocircuito y
circuito abierto
La impedancia característica y la función de propagación son los tres parámetros físicos, de
cudripolo pasivo y simétrico, que caracterizan completamente, su comportamiento y constituyen
la base del diseño de muchas redes de aplicación práctica en la ingeniería de comunicaciones.
Por consiguiente, es conveniente poder determinarlos, por cálculo o experimentalmente.
Para ello buscaremos estas relaciones útiles.
γ γ γ
cosh2
=+ −ee
Remplazando eγ por la expresión dada en la Ec. [36]
)1.(2
)1(2
1.(2
1.22cosh
)1(2
1112
2
1/11cosh
2
2
2
22
2
22222
−+
−+=
−+
−+=
−+
+−+−+=
−++−+=
A A
A A A
A A
A A A
A A
A A A A A A A A
γ
γ
A=∴ γ cosh [40]
Además
C B A senh .1cosh 222 −==− γ γ Por ser simétrico y pasivo
C B senh .=γ [41]
Las ecuaciones [40] y [41] son muy importantes para la deducción de las ecuaciones clásicas de
filtros de ondas.
Por otra parte:
A
C
D
B
A
C B
A
C B senhtgh .
..
cosh 2 ====
γ
γ γ
Pero
eca z z A
C 11
11== y ecc z
Y D
B==
11
1
eca
ecc
z
z tgh =∴ γ [42]
Otras relaciones útiles son aquellas que expresan la tensión y la corriente de entrada, en términos
de la función de propagación γ y de la impedancia característica z0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 201/424
200
Para ello debemos escribir los parámetros ABCD en función de γ y z0.
γ cosh== D A Por ser simétricos
Por otra parte
γ γ
γ γ
senh z
C B
C C B
z senh
y
senh z BC
B
C B z senh
00
00
1..
1).(
.).(
=⇒=
=⇒=
Luego recordando la ecuación característica de los parámetros ABCD
221
221
.
..
DI V C I
I BV AV
+=
+=
Reemplazando ABCD por las expresiones halladas obtenemos
⎪⎩
⎪⎨⎧
+=
+=
γ γ
γ γ
cosh.
..cosh.
20
21
0221
I senh z
V I
senh z I V V [43]
El sistema de la Ecs. [43], son útiles para la obtener el circuito o cuadripolo equivalente a una
línea de trasmisión, ya que esta se definen generalmente por las funciones hiperbólicas de γ y por
z0.
Debe insistirse en que todas estas relaciones son validas únicamente si el cuadripolo es pasivo,
simétrico y en condiciones de adaptación, es decir está cargado con z0.Si la impedancia de carga zL difiere de z0, ocurren interacciones y reflexiones, con la
consecuencia de que las relaciones [34], [36], [38], y [39], ya no se cumplen.
Ya veremos mas adelante este caso.
Antes vamos a obtener la impedancia característica y la función propagación de tres cuadripolos
pasivos y simétricos clásicos y muy utilizados en la teoría de filtros de ondas.
I2
z0
I1
Vg V2z0 V1 [γ]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 202/424
201
Sección en T: Sea el cuadripolo pasivo y simétrico de la Fig. 31.
Recordando la Ec. [34]
ecceca z z z T
.0
=
Luego
2
1
2 z
z z
eca += y
21
21
1
2
.2
2 z z
z z
z
z ecc +
⎟ ⎠
⎞⎜⎝
⎛
+=
21
21
21
21
2112
10 .
2.
442
.2/
2.
2 z
z z
z z
z z
z z z z
z z T ++=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
++⎟
⎠
⎞⎜⎝
⎛ +=∴
4
.2
1210
z z z z T +=∴ [44]
Calculo de la función propagación:
γ
γ 2tanh1
1cosh
−= pero
zeca
zecctagh =γ Por la Ec. [42]
⎟ ⎠
⎞⎜⎝
⎛ +−−+
⎟ ⎠
⎞⎜⎝
⎛ +=
−
=
−
=∴
21
21121
21
2
)).2/((22
2
1
1cosh
z z
z z z z z
z z
z z
z
zeca z ecceca
eca
ecc
γ
2
21
21
22
21
21
12
21
2
2
2
2
2/1.
2cosh
z
z z
z z
Z
z z
z z
z Z
z z
+=
⎟ ⎠
⎞⎜⎝
⎛ +
⎟ ⎠
⎞⎜⎝
⎛ +=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+−
⎟ ⎠
⎞⎜⎝
⎛ +=γ
z1/2
z2
z1/2
Fig.31

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 203/424
202
z1
2z22z2
Fig.32
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=∴
2
1
21cosh.
z
z Arcγ [45]
La Ec. [45] es muy importante para el desarrollo, de la teoría de filtros.
Sección en π:
Sea el cuadripolo pasivo y simétrico de la figura 32
)4(
.4
4
.4
)2).(4(
).2)(2).(2(
211
21
22
21
12
2
2121
122120
z z z
z z
z z
z z
z z z z
z z z z z Z
+=
+=
+++
=π
T z
z z
z z z
z z z
0
212
121
210
.
4.
.=
+
=∴ π [46]
Para el cálculo de la función propagación γ volvemos a la expresión:
12
12
21
212
21
212
2
.2
4
)2(2
4
)2(2
cosh
z z
z z
z z
z z z
z z
z z z
z z
z
ecceca
eca
+−
+
++
+
=−
=γ
)2(
)4(.2)2(2
)2(2
12
21122
212
212
z z
z z z z z z z
z z z
+
+−+
+=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=∴
2
1
21cosh
z
z Ar γ [47]
Comparando la Ec. [47] y [45] se deduce una conclusión muy importante en la teoría de filtros
de ondas: esta dos secciones reciprocas, si bien tienen distintas sus impedancias características
Z0T ≠ Z0π, presentan igual valor de la función de propagación γ.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 204/424
203
Sección en celosía
Otro cuadripolo muy importante, en la teoría de filtros es la red en puente o celosía,
representada en la Fig. 33 a) y b)
De donde
210 . Z Z z = [48]
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
−+
=2/2
22/cosh.
12
21
z z
z z Arcγ [49]
V1
2z2
I1
+
-
I2V2
Fig.33 a)
-+
z1/2
2z2 z1/2
2z2
z1/2
z1/2
2z2
I1 I2
+
-
V1
+
V2
-
b)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 205/424
204
Cuadripolo simétrico totalmente desadaptado
Este es el caso más general que se encuentra dentro de los cuadripolos simétricos, aquel que en
la impedancia de carga ZR y la impedancia del generador Zg son distinta de Z0
En el cuadripolo pasivo y simétrico de la Fig.34, donde se conocen la impedancia característica
Z0 y la función γ, se cumple que:
g11gg1g1 .zIVV.zIVV +=⇒−= [50]
R z I V .22 = R z
V I 2
2 =⇒ [51]
Del sistema de Ecs. [43], se introduce V1 e I1 en la Ec. [50] y reemplazando I2 por la Ec. [51] nos
queda:
.coshγz
z.V.senhγz
z.V.senhγzz.V.coshγVV
R g2
0g2
R 022g +++=
R
R g g R R g g R g
R
R g R g g R g R g
R
R g
R
g R g
R
R g g R g
R
g R g R g
z z
e z z z z z z z e z z z z z z z
V
V
Z Z
e z z z e z z z e z z z z e z z z z
V
V
z z
z z z ee
z z
z z z z ee
V
V
z z
z z z senh z z z z
V
V
z z
z z senh z z senh z z z
V
V
.2
).().(
.2
)()().().(
..
2.
..
2
.
)..()..(cosh
.
cosh.....cosh..
0
2000
2000
2
0
20
200000
2
0
20
0
00
2
0
2000
2
0
02
00
2
γ γ
γ γ γ γ
γ γ γ γ
γ γ
γ γ γ γ
−
−−
−−
+−+++++
=
+−+++++=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +=
+++=
+++=∴
I2
zR
+
Vg V2
zg
V1
γ yz0
I1
+
-
+
-
Fig. 34 Cuadripolo simétrico y desadaptado

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 206/424
205
R
g R
R
g R g
z z
e z z z z
z z
e Z z z z
V
V
.2
).).((
.2
).).((
0
00
0
00
2
γ γ −−−−
++=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
++
−−−
++=∴ − γ γ 2
00
00
0
00
2.
)).((
)).((1..
.2
)).((e
z z z z
z z z z e
z z
z z z z
V
V
g R
g R
R
g R g [52]
A esta altura del desarrollo, primero haremos algunas denominaciones en la Ec. [52] y luego
analizaremos cada uno de ellos.
γ e z z
z z z z F
R
g R.
.2
)).((
0
00 ++=
Multiplicando y dividiendo por g z .2 nos queda.
γ e z z
z z
z z
z z
z
z F
g
g
R
R
R
g .
.2.
.2..2
0
0
0
0⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ = [53]
Al factor F se la llama “factor de interacción” de la carga al generador donde:
=+
= R
ROR
z z
z z F
.2 0
0 Factor de interacción en el extremo receptor o salida
=+= g
g OG
z z
z z F .2 0
0 Factor de interacción en el extremo transmisor o entrada
Si la salida esta adaptada es zR = z 0 y FOR =1
Si la entrada esta adaptado es zg = z0 y FOG =1
Luego el factor F queda expresado como
γ e F F z
z
F OGOR R
g
....2= [54]
En cuanto al otro término, hacemos:
( )( )( )( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
++
+−−= − γ 2
00
00.
.
.1 e
z z z z
z z z z F
g R
g Ri [55]
Llamado “factor de reflexión”.
Siendo:=
+
−=
R
R R
z z
z z
0
00 ρ Coeficiente de reflexión en el extremo receptor o salida

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 207/424
206
=+
−=
g
g OG
z z
z z
0
0 ρ Coeficiente de reflexión en el extremo transmisor o entrada
Luego el factor Fi queda expresado como:
γ ρ ρ 2..1 −−= e F OGORi [56]
En este factor Fi vemos que:
a) Cuando por lo menos un extremo está adaptado el coeficiente ρ se anula y es Fi =1
b) Cuando el cuadripolo esta desadaptado en ambos extremos es siempre Fi< 0
c) Cuando el circuito está abierto (zR =∞ ) es ρOR = -1
Lo mismo vale para zg = ∞ es ρOG = -1
d) Con la entrada o salida en cortocircuito es ρOG = 1 ó ρOR =1
Vamos a analizar ahora la expresión total de la relación de la tensión de entrada ó señal Vg a la
tensión de salida sobre la carga V2, y veremos que a los diferentes factores se le puede dar un
sentido físico determinado.
Para ello escribimos la Ec. [52] así:
[ ]γ γ ρ ρ 2
0
0
0
0
2..1..
2.
.2..2 −−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ = ee
z z
z z
z z
z z
z
z
V
V OGOR
g
g
R
R
R
g g [57]
Consideremos, en primer lugar el término R g z z /.2 .
Puede verse fácilmente que su módulo, es la relación entre las tensión de entrada y salida en el
circuito de la Fig.35, en el que la carga, en forma de una resistencia |ZR |, esta acoplada al
generador de resistencia interna |Zg| mediante un transformador ideal con la relación de espiras
R g z z N N // 21 =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 208/424
207
Por consiguiente, el módulo del primer término de la Ec. [57], representa la modificación de la
relación de las tensiones debida a la desigualad de ambas impedancias y puede interpretarse
como una relación de transformación.
Podemos también observar, que si en este término es zR > zg, entonces es F< 1 en la Ec. [54] y
en ese caso, para un mismo valor de señal de entrada Vg, habrá una mayor señal de salida V2
Por lo tanto si no hay más remedio que trabajar con el circuito desadaptado, conviene que sea
zR > zg, para tener una salida mayor.
Los dos factores siguientes (FOR y FOG) de la Ec. [57], vimos que se reducen a la unidad si el
cuadripolo esta terminado en ambos extremos en su impedancia característica, y por lo tanto, se
deben a la desadaptación de las impedancias terminales y llevan el nombre de “factores de
interacción”.-
El término exponencial γ e es el que habíamos definido con la función de propagación, y por lo
tanto, representa la atenuación y defasaje de las ondas de tensión y corriente, ocasionado por la
naturaleza misma del cuadripolo, independientemente de sus terminaciones.
El último término (Fi) denominado “factor de reflexión”, se debe a las reflexiones de las ondas
en ambos extremos.
Ello justifica la presencia del factor γ 2−e , puesto que el último corchete corresponde a la onda
que recorre la red dos veces: una vez de la derecha a la izquierda (de la carga al generador,
después de reflejarse en zR ) y otra vez de izquierda a derecha (del generador a la carga, después
de volver a reflejarse en Zg).Cuando la desadaptación no es muy grande o existe una fuerte atenuación (α grande), Fi es
aproximadamente la unidad, en cuyo caso son los dos factores anteriores (FOR y FOG) los que
señalan los efectos de la desadaptación de impedancias.-
La Ec. [57] puede escribirse de la forma
2
20
202
.
V
V
V
V
V
V g g = [58]
Donde:
+
Vg
|zg|
Ideal
|zR |
1:/ R g z z
Fig. 35 Interpretación física del factor R g z z /.2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 209/424
208
R
R g g
Z
Z Z
V
V +=
20 [59]
Es la relación de tensión de entrada y salida cuando la carga se conecta directamente al
generador, tal como se indica en la Fig.36
El otro término es.
== η je N V
V .
2
20 Factor de inserción
De la ecuación [58] y utilizando la Ec. [59] tenemos que:
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
+
=
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
+
=+
==
g
R
R
g
iOGOR
R
g
R
g
iOGOR
R
R g
iOGOR R
g
g
g
z
z
z
z
F e F F
z
z
z
z
F e F F
z
z z
F e F F z
z
V V
V V
V
V
2
1
...
1..
....2.....2
/
/
20
2
2
20 γ γ
γ
Luego
[ ]
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
==
−
g
R
R
g
OGOR g
g
R
R
j
z
z
z
z
ee z z
z z
z z
z z
e N V
V
2
1
..1...2
..2
.
2
0
0
0
0
2
20
γ γ
η
ρ ρ
[60]
La Ec. [60] representa la relación entre la tensión V20 en la carga, en caso de no existir el
cuadripolo (ver Fig. 36), y V2 que es la tensión que tenemos en zR, después de la inserción del
cuadripolo
En la Ec. [60] el módulo N es la relación de inserción y n el ángulo de fase de inserción.
V20Vg
+
zg
Fig. 36 Tensión V20 en la carga, conectándola directamente al generador
zR

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 210/424
209
Cuadripolos Asimétricos
Impedancia imagen:
Sea un cuadripolo pasivo y asimétrico.
Por lo tanto se cumple que z12 = z21 por ser pasivo y que z11 ≠ z22, por ser asimétrico.
Por ser asimétrico, ya no se cumple la definición de impedancia característica z0, dada
anteriormente y que valía para ambos extremos, pero podemos definir en cambio la “impedancia
imagen” z01 y z02
Definición:
Z02, es el valor de impedancia que colocada a la salida, refleja a la entrada un valor z01, siendo
este último, el valor de impedancia que colocada a la entrada, refleja el valor z02 a la salida.
Observando la Fig. 35 y teniendo en cuenta la definición de “impedancia imagen”, tendremos
que: cargando la entrada con z01 y la salida con z02 y si cortamos según A, vemos hacia ambos
lados z01, y si cortamos en B, vemos hacia ambos lados z02.
En estas condiciones el cuadripolo esta cargado con sus impedancias imágenes.
Cálculo de la impedancia imagen
Considérese el cuadripolo de la Fig. 36, el que se supondrá pasivo y asimétrico, a cuya entrada
se conecta un generador de tensión Vg, dotado de una impedancia interna zg, y a la salida se
conecta una impedancia zR , siendo V2 la tensión que se crea en la impedancia zR .
Escribimos el sistema de ecuaciones dada por la Ec. [14] para los parámetros de transmisión y
teniendo en cuenta la inversión en el sentido de la corriente I2.
221221
. .. DI V C I
I BV AV += += [61]
z02
B
z01
z12 = z21
z11≠ z22
Fig.35
z01
z02
A
I2
zR
+
Vg V2zg V1
I1
Fig. 36

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 211/424
210
Dividiendo miembro a miembro obtenemos la impedancia de entrada.
D I
V C
B I
V A
I DV C
I BV A
I
V z e
+
+=
++
==
2
2
2
2
22
22
1
1
.
.
..
..
Pero
R z I
V =
2
2 D z C
B z A z
R
Re +
+=∴
.
. [62]
De la misma forma, si obtenemos los parámetros inversos A’, B’, C’, D’
112
112
''.
'.'.
I DV C I
I BV AV
−=
−=
Cambiando el sentido de la corriente como se indica en el circuito de la Fig 37( -I1 = I1), nos queda:
112
112
''.
'.'.
I DV C I
I BV AV
+=
+=
Pasando de los parámetros A’, B’, C’, D’ a los A, B, C, D, por Tabla I, nos queda:
112
112
.
..
I D
V C
I
I B
V D
V
γ γ
γ γ
Δ+Δ=
Δ+
Δ=
Que, resulta para V2 e I2 y teniendo en cuenta que Δγ = A.D - B.C = 1 por tratarse de
cuadripolos pasivos da:
⎩⎨⎧
+=
+=
112
112
..
..
I AV C I
I BV DV [63]
Dividiendo miembro a miembro, se obtiene la impedancia de salida
A Z C
B Z D z
A I
V C
B I
V D
I AV C
I BV D z
R
RS S +
+=⇒
+
+=
+
+=
.
.
.
.
..
..
1
1
1
1
11
11 [64]
I2
VgZR V2V1
I1
Fig. 37
+ Zg
A.D-B.C=1
A≠D

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 212/424
211
De acuerdo a la definición de impedancia imagen, si cargamos a la salida con z02 vemos a la
entrada z01 y viceversa.
Por lo tanto:
D z C
B z A z
+
+=
02
02
01 .
. y
A z C
B z D z
+
+=
01
01
02 .
. [65]
Las relaciones [65] establecen el sistema de ecuaciones simultáneas
0....
0....
02010201
02010201
=−+−
=−−+
B z A z D z z C
B z A z D z z C
Sumándolos miembro a miembro resulta
C B z z /. 0201 =
Mientras que restándolos se deduce
D A z z // 0201 =
De donde
DC
B A z
.
.01 = y
C A
D B z
.
.02 = [66]
Las relaciones [66] demuestran que las impedancias imagen son parámetros característicos del
cuadripolo, e independientes de su terminación

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 213/424
212
Función de propagación
Al igual que en cuadripolos simétricos, se necesita muchas veces conocer la relación entre las
tensiones (o entre las corrientes) en ambas puertas de un cuadripolo pasivo.
Supongamos primero que el extremo de salida está terminado con la impedancia imagen, es decir
que zR = z02.
Las Ecs. [61] pueden escribirse:
221 BI AV V += ∴ 22
21 V
V
I B AV ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += ∴ 2
021 .V
z
B AV ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
221 DI CV I += ∴ 22
21 . I D
I
V C I ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += ∴ ( ) 2021 .. I D z C I += [67]
Por consiguiente, las relaciones entre las tensiones en ambos extremo son:
⎟ ⎠ ⎞⎜
⎝ ⎛ +=+=+= C B D A
D
A
D B
C A B A
z
B A
V
V ...
.
..
022
1 [68]
Y las relaciones entre las corrientes
⎟ ⎠ ⎞⎜
⎝ ⎛ +=+=+= C B D A
A
D D
C A
D BC D z C
I
I ...
.
... 02
2
1 [69]
Si ahora se conecta en los bornes de entrada la impedancia z01 en vez del generador,desplazando este a los bornes de salida, se obtiene la situación (representada en la Fig. 37),
adecuada para la evaluación de las conexiones de propagación de derecha a izquierda, así
poniendo en [63] I1 = V1/z01, resulta:
101
2 .V z
B DV ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += ; ( ) 1012 .. I A z C I += [70]
De donde teniendo en cuenta la relación [66]
⎟ ⎠ ⎞⎜
⎝ ⎛ += C B D A
A
D
V
V ...
1
2
[71]
⎟ ⎠ ⎞⎜
⎝ ⎛ += C B D A
D
A
I
I ...
1
2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 214/424
213
Recordando que D A z z // 0201 = tenemos que
n z
z
D
A==
02
01 [72]
Cuya magnitud puede considerarse como relación de transformación de la red, puesto que
representa la raíz cuadrada de la relación entre las impedancias terminales (impedancia imagen)
y, además, multiplica la relación de las tensiones y divide la relación de las corrientes
El otro factor que figura en ambas ecuaciones [71] puede expresarse en la forma exponencial
como se definió en cuadripolos simétricos
γ eC B D A =+ .. [73]
Siendo )()()( ω ω ω β α γ j+=
La “función propagación” para cuadripolos asimétricos, que al igual que en cuadripolos
simétricos, es una magnitud compleja, función de la frecuencia y que puede considerarse como
la medida del efecto del cuadripolo sobre las ondas de tensión o de corriente, que se propagan de
un extremo a otro.
Las partes real e imaginarias de γ son:
α(ω) = “función de atenuación”, dado que el módulo de la relación entre las corrientes ytensiones es eα .
β(ω) = “función de fase”, debido a que mide efectivamente el desfasaje que sufren la corriente yla tensión en su propagación a través del cuadripolo
Como es el caso de cuadripolos simétricos vamos a hallar las relaciones que expresan la tensión
y la corriente de entrada, en término de la función propagación γ y de las impedancias imagen z01
y z02 .
Para ello se introduce la Ec. [73] en la [71]
γ enV
V .
2
1 = ;n
e
I
I γ
=2
1 [74]
Recordando que por ser pasivos se cumple que A.D - B.C = 1
C B D AeC B D A
C B D A
C B D Ae ..
..
..
..
1−=⇒
−
−=
+= −− γ γ [75]
Sumando y restando [73] y [75] miembro a miembro resulta

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 215/424
214
2
.2
2
....
2cosh
D AC B D AC B D Aee=
−++=
+=
−γ γ
γ
D A.cosh =∴ γ [76]
2.2
2....
2C BC B D AC B D Aee senh =+−+=−=
−γ γ
γ
C B senh .=γ [76]
Con ello las ecuaciones [61] pueden escribirse
( )γ γ senh z I V nC A
D BC B I D AV
D
AV 0222221 .cosh.
.
..... +=⎥
⎦
⎤⎢⎣
⎡+ [77]
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ += γ γ cosh..
1.....
.
.. 2
02
2221 I senh
z
V
n I D AV C B
C B
C A
A
D I [78]
Esta relación es validas para cuadripolos asimétricos, pasivos y cargados en ambos extremos con
su impedancia imagen.
Ya veremos mas adelante el caso de cuadripolos desadaptados.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 216/424
215
Determinación de la función de propagación e impedancia imagen, a partir de las impedancias en
cortocircuito y circuito abierto
Para ello trabajamos con la tabla I de equivalencia
=== eca z z C A 11 Impedancia de entrada con la salida en circuito abierto
=== ecc z y D
B
11
1 Impedancia de entrada con la salida en cortocircuito
=== sca z z C
D22 Impedancia de salida con la entrada en circuito abierto
=== scc z y A
B
22
1 Impedancia de salida con la entrada en cortocircuito
Combinando estas relaciones con la Ec. [66], resulta:
ecceca z z D
B
C
A z ..01 == y sca scc z z
C
D
A
B z ..02 == [79]
Es decir, las impedancias imagen son las medias geométricas de las impedancias terminales, con
el otro extremo del cuadripolo en cortocircuito y circuito abierto, respectivamente.
Por otra parte, combinando las relaciones vista con las Ec. [76] se tiene:
sca
scc
eca
ecc
z
z
z
z
D A
C Btgh ===
.
.γ [80]
Las expresiones subradicales son las relaciones entre las impedancias terminales en cortocircuito
y circuito abierto en cualquiera de los dos extremos.
Este resultado es evidente, dado que γ no depende de las terminaciones sino de los parámetros
intrínsecos del cuadripolo.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 217/424
216
Cuadripolo asimétrico desadaptado
Si se termina el cuadripolo con dos impedancias cualesquiera, zg y zR , distintas de las
impedancias imagen, la relaciones [74] entres las corrientes y tensiones evidentemente ya no se
cumplen.
Sin embargo, reconsiderando el razonamiento anterior, aun pueden hacerse intervenir los
parámetros imagen.
En efecto, para el cuadripolo de la Fig.36 se tiene:
11 . I z V V g g −= ; 22 . I z V R= [81]
Pero en base a la Ec. [77]
)..(cosh 0221 γ γ senh
z
z nV V
R
+= [82]
Que junto con [78] y la primera Ec. [81], da:
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++⎥
⎦
⎤⎢⎣
⎡+=
γ γ
γ γ γ γ
sh z n
z
z
z n
z n
z nV V
z senh
z n
Z V senh
z
z nV V
g
R R
g g
R
g
R g
..
.cosh
..
cosh11
..
.cosh.
02
022
02
2022
Eliminando n con ayuda de [72] obtenemos:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ +=
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
γ γ
γ γ
senh z z
z z z z
z
z z
z
z z
Z
V V
senh z
z
z
z
z
z
z
z
z
z V V
R g g R
R g
g
R R
g g
..
..cosh..
.cosh.1..
02010201
01
02
02
012
01
02
01
02
02
012
Si se sustituye en el último desarrollo las funciones hiperbólicas por las exponenciales, resulta:
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +++= γ e
z z
z z z z
z
z z
z
z z
z
V V
R g g R
R g .
.
....
2 02010201
01
02
02
012
γ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡−−++ e
z z
z z z z
z
z z
z
z Z
z
V R g g R
R
..
....
2 02010201
01
02
02
012 [83]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 218/424
217
A cuya expresión puede darse una forma más conveniente.
γ
γ
−⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
−−++
+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +++=
e z z
z z z
z
z z
z
z z
z
z
z
z z
e z z
z z z
z
z z
z
z z
z
z
z
z z
V
V
g
R R
g
g
R R
g g
..
.....
..2
1
..
.....
..
2
1
0201
02010201
01
0201
02
0201
0201
02010201
01
0201
02
0201
2
γ e z z z
z z z z z z z z z z z z z z z z
V
V
R
R g g R g .
..2
............
0201
020102010201020201010201
2 ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +++=
γ −⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−++ e
z z z
z z z z z z z z z z z z z z z z
R
R g g R.
..2
............
0201
020102010201020201010201
+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +++= γ e
z z z
z z z z z z z z z z
V
V
R
R g R g .
..2
).(..).(..
0201
02020102010201
2
γ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −−−+ e
z z z
z z z z z z z z z z
R
R R g .
..2
).(...).(..
0201
02010201020201
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++
−−−
++=∴
−−−
++=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡ −−−
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡ ++=
−
−
−
γ γ
γ γ
γ γ
2
0201
0201
0201
0201
2
0201
0201
0201
0201
2
0201
02010201
0201
02010201
2
.)).((
)).((1..
..2
)).((
...2
)).((.
..2
)).((
...2
.).).((.
..2
.).).((
e z z z z
z z z z e
z z z
z z z z
V
V
e z z z
z z z z e
z z z
z z z z
V
V
e z z z
z z z z z z e
z z z
z z z z z z
V
V
R g
R g
R
R g g
R
R g
R
R g g
R
R g
R
R g g
Multiplicando y dividiendo al primer factor por g z .2 nos queda.
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++
−−−⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +⎟⎟ ⎠
⎞⎜⎜⎝
⎛ = − γ γ 2
0201
0201
02
02
01
01
2.
)).((
)).((1..
.2.2..2 e
z z z z
z z z z e
z z
z z
z z
z z
z
zg
V
V
R g
R g
R
R
g
g
R
g [84]
La Ec. [84] nos da la relación entre la tensión de entrada y la de salida, de un cuadripolo pasivo,
asimétrico y totalmente desadaptado, en función de la función propagación y de las impedancias
imagen.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 219/424
218
En una forma enteramente similar a lo visto en cuadripolos simétricos y desadaptados, en la Ec.
[84] definiremos algunos factores.
Llamando a:
γ
e z z
z z
z z
z z
z
z
F R
R
g
g
R
g
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ +⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ +
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
= ..2...2..202
02
01
01
[85]
Al factor F se le llama “factor de iteración” de la carga al generador donde:
==⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +OG
g
g F
z z
z z
..2 01
01 Factor de interacción en el extremo transmisor o entrada
==⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ +
OR R
R F z z
z z
..2 02
02 Factor de interacción en el extremo receptor o salida
Si la salida está adaptada es zR = z02 y FOR = 1.
Si la entrada está adaptada es zg = Z01 y FOG = 1.
Luego el factor F queda expresado como:
γ e F F z
z F OROG
R
g ....2= [86]
En cuanto al otro término, llamamos:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++
−−−= −γ e
z z z z
z z z z F
R g
R g i .
)).((
)).((1
0201
0201 [87]
Llamado “factor de reflexión”, siendo:
( ) =
+
−=
R
g
OG z z
z z
01
01 ρ Coeficiente de reflexión en el extremo transmisor o entrada.
( )( )
=+
−=
R
ROR
z z
z z
02
02 ρ Coeficiente de reflexión en el extremo receptor o salida.
Luego el factor Fi queda expresado como:
γ ρ ρ 2..1 −−= e F OROGi [88]
En este factor Fi también se cumple que:
a) Cuando por lo menos un extremo está adaptado el coeficiente ρ se anula y es Fi = 1.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 220/424
219
b) Cuando un cuadripolo esta desadaptado en ambo extremos es siempre Fi < 1
c) Cuando el circuito está abierto (zR =∞ ) es ρOR = -1 ;lo mismo en la entrada es ρOG = -1.
d) Con la entrada o salida en cortocircuito es ρOG = 1 ó ρOR = 1.
Finalmente podemos decir que a los diferente factores de la Ec. [84] se le puede dar la misma
interpretación física que en el caso de cuadripolos simétricos y desadaptados, visto anteriormente.
Factor de inserción
La Ec. [84] puede escribirse de la forma:
2
20
202
.
V
V
V
V
V
V g g =
Donde R
R g g
z
z z
V
V +=
20
Es la relación de tensiones de entrada y salida cuando la carga se conecta directamente al
generador, tal como lo indica la fig.36, el otro término se denomina “factor de inserción”.
[ ]
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
−⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ +
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
===
−
g
R
R
g
OROG R
R
g
g
j
g
g
z
z
z
z
ee z z
z z
z z
z z
e N V V
V V
V
V
.2
1
..1...2..2.
/
/
2
02
02
01
01
20
2
2
20
γ γ
η ρ ρ
[89]
Por consiguiente al igual que en cuadripolo simétrico desadaptado, N.e jη es el término (en
módulo y fase) debido a la inserción del cuadripolo y de ahí su nombre.
Pérdida de inserción
Se ha visto que la inserción de un cuadripolo entre un generador y una carga, origina una
variación de la potencia absorbida por ésta.
Así la Ec. [89] expresa la relación entre la tensión de salida, sin y con el cuadripolo intercalado,
en la forma:
η je N V
V .
2
20 = [90]
Las corrientes en la carga en ambos casos son:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 221/424
220
R z
V I 20
20 = ; R z
V I 2
2 =
Resultando la relación entre ellas:
η je N V
V
I
I .
2
20
2
20 == [91]
Recordando la expresión que da la potencia activa disipada en las cargas, para regímenes
senoidales es:
[ ] ⎥⎦
⎤⎢⎣
⎡==
R z V I V P
1.Re..
2
1..Re.
2
1 22020
*2020
y [ ] ⎥⎦⎤⎢
⎣⎡==
R z V I V P 1.Re..
21..Re.
21 222*22
Donde V*2 es el complejo conjugado de la tensión V2 y Re [] significa la parte real del complejo
en cuestión.
Haciendo la relación entre las potencias nos queda:
22
2
202
2
20
2
20 N I
I
V
V
P
P =−= [92]
La cantidad de pérdida (o ganancia) de potencia ocasionado por la inserción de cuadripolo,
puede evaluarse en unidades de N2.
Sin embargo físicamente es más representativo, y en los cálculos es más cómodo, emplear
unidades logarítmicas.
Si se utiliza logaritmos neperianos, se define la pérdida de inserción mediante la relación:
Pérdida de inserción = )ln()/ln( 220 N P P = (neperios) [93]
Resultando que la pérdida de un neper se produce para N = e, es decir cundo
4.72
2
20 == e P
P
Estas unidades se prestan a una interpretación particularmente simple cundo el cuadripolo es
simétrico (z01 = z02) y se lo termina en ambos extremos por su impedancia característica, ya que
en este caso la fórmula [89] da:
)(. β α γ η j j eee N +==

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 222/424
221
Y por lo tanto, N = eα, es decir:
α =⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =⎟
⎟ ⎠
⎞⎜⎜⎝
⎛
2
20
2
20 lnlnV
V
I
I (Neperios) [94]
α 2lnln2
2
20
2
20 =⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ =⎟
⎟ ⎠
⎞⎜⎜⎝
⎛
V
V
P
P (Neperios) [95]
En los cuadripolo asimétricos (Z01 ≠ Z02) pero adaptados (es decir terminados en sus
impedancias imagen), las pérdidas de inserción que se deducen de la Ec. [89] son:
⎟⎟⎟⎟
⎟
⎠
⎞
⎜⎜⎜⎜
⎜
⎝
⎛
+
=⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ =⎟⎟
⎠ ⎞⎜⎜
⎝ ⎛
01
02
02
012
20
2
20 .2lnlnln
z
z
z
z
e I I
V V α
Luego:
α α ⟨
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
+
+==
01
02
02
012
20
2
20 2lnlnln
z
z
z
z I
I
V
V [96]
α α 24
ln2lnln2
01
02
02
01
2
2
20
2
20 ⟨
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
+
+=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ =⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ∴
z
z
z
z V
V
P
P [97]
Si en el cuadripolo que se inserta, α es suficientemente pequeño, resulta ln (P20/P2) < 0, lo que
equivale a una ganancia, originada por la inserción del cuadripolo.Como estamos tratando con cuadripolo pasivos, físicamente esto se interpreta en el sentido de
que un cuadripolos posee propiedades de adaptación de impedancia y puede emplearse, en
determinada circunstancia, en sustitución del transformador.
En aplicaciones prácticas 1 Neperio es una unidad excesivamente grande.
Una unidad más cómoda en las medidas es el decibelio que se define por la relación:
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ =
2
1log10 P
P S
db
[98]
Donde P1 y P2 son dos potencias cualesquiera.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 223/424
222
Es de observar que las unidades logarítmicas se aplican para relacionar dos potencias (por
ejemplo en dos puntos del circuito, en un mismo punto ante y después de la inserción de un
transformador, etc.), sin distinción de su origen o efecto.
Cuando se trata de las pérdidas que resultan de la inserción de un cuadripolo en un sistema de
transmisión, la formula [98] da:
N I
I
V
V
P
P S db log20log.20log.20.log10
2
20
2
20
2
20 ===⎟⎟ ⎠
⎞⎜⎜⎝
⎛ = [99]
Puesto que ln x = 2.30.Log x, la medida de una misma magnitud en ambas unidades se expresa
como:
dbS I
I
I
I Snep .115.0log.20.20
30.2.log.30.2
21
21 === [100]
Analizando la Ec. [100] podemos decir que un decibelio equivale a 0,115 neperios y a la inversa,
un neperio equivale a 20. log e = 8.686 decibelios.
Hasta ahora se a hablado de las “perdida de inserción” que se miden en los extremos de una
misma impedancia (por ejemplo en los terminales de salida), por la relación entre, las potencias
antes y después de la inserción del cuadripolos, y también por las “perdidas de atenuación” cuyo
valor en Neperios es α (en cuadripolo simétricos, terminados en su impedancia característica) yéstas también son las perdidas de inserción.
En una red cualquiera se definen las “pérdidas de transmisión”, o simplemente “pérdidas”, como
disminución de la potencia en la transmisión de la señal de un punto a otro.
Las “pérdidas de transmisión” se miden, como antes, en neperios o decibelios, definido por la
relaciones [93] ó [98], respectivamente.
Sin embargo, debe tenerse presente que en el caso general I1/I2 ≠ V1/V2, por lo cual las pérdidas
ya no pueden expresarse como 20.Log.| I1/I2 | ó 20.Log.| V1/V2 |.
Debe observarse, asimismo, que las “perdidas de inserción” de una red dependen, tanto del lugar
de inserción, como de las impedancias terminales, de modo que su valor no es característico de
la red.
Las pérdidas de atenuación, cuyo valor (en neperios) es independiente de las terminaciones e
igual a α (parte real de la constante de atenuación γ), constituyen en cambio, un parámetro
especifico de un cuadripolo, o de una asociación en cadena de un grupo de cuadripolos
idénticos._
Adaptación de impedancias

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 224/424
223
Como una aplicación a lo ya visto en el desarrollo de este capitulo, vamos a ver el tema
adaptación de impedancias:
El principio de adaptación de impedancias se basa en dos teoremas sobre máxima transferencia
de potencia
Uno que dice:
“Una red absorberá la máxima potencia de otra (unida a la primera por dos terminales), si las
impedancias de las dos redes vista desde los terminales, son recíprocamente conjugados.
Es decir si
R R = R G y XR = -XG [101]
Y el otro que dice:
“Si puede variarse la amplitud pero no el ángulo de fase de la impedancia de carga, se absorberá
la potencia máxima del generador, cuando la magnitud de la impedancia de carga sea igual a la
magnitud de la impedancia interna del generador”.
Esto es que:
| zR | =| zG | [102]
Esto dos teoremas expresan los valores óptimos de la impedancia de terminación de un
generador.
Dado que las cargas típicas, no son necesariamente los óptimos para los generadores que los
alimentan, es que se necesita de algún método para la transformación de la impedancia ofrecida
al generador, uno de estos métodos es a través de cuadripolos adaptadores de impedancia.
Este cuadripolo debe estar diseñado de tal manera que intercalado entre la carga y el generador
produzca la adaptación necesaria de acuerdo con los teoremas anteriores.
zG
zR Vg
+
zG
zR
+
Vg
Cuadripolotransformador deimpedancias
Fig. 381’
2’
2 1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 225/424
224
Si el cuadripolo contiene componentes resistivos, la potencia entregada en los terminales 1-1’ de
la (Fig.38), será mayor que la potencia absorbida por la carga en los terminales 2-2’ y esta
pérdida de potencia es en general indeseable (excepto en el caso de “atenuadores”).
Por consecuencia, casi todas las redes transformadoras de impedancias se construyen con
elementos puramente reactivos.El método de adaptación a través del cuadripolo, se basa en la propiedad transformadora de
impedancias que tiene los cuadripolos pasivos y asimétricos.
Para ello recordamos que si un cuadripolo de esta característica se conecta entre un generador de
impedancia interna z01 y una carga cuya impedancia es z02, las impedancias estarán adaptados en
los dos empalmes y se absorberás la máxima potencia del generador, ya que se ha supuesto que
el cuadripolo está conformado por elementos puramente reactivos.
Recordando del desarrollo del tema de cuadripolo pasivos, asimétricos y en condiciones deadaptación, las expresiones de tres relaciones fundamentales:
11
1101
y
z z = [103]
22
2202
y
z z = [104]
1111.1 y z
tng =γ Donde γ = α (ω) +jβ (ω) [105]
Estas expresiones nos dan las impedancias imagen y la función de propagación, en función de
los parámetros propios del cuadripolo.
Quiere decir que haciendo cumplir las condiciones de adaptación, esto es que z01 sea igual a la
impedancia interna del generador, z02 igual a la impedancia de carga y en la constante o función
propagación, hacer la función de atenuación α = 0 (que es la condición para que el cuadripolo no
contenga elementos disipativos), podemos hallar los valores de los parámetros que cumplen con
la condición de máxima transferencia de potencia.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 226/424
225
Ejemplo 8: Veamos el caso en que se desea adaptar por medio de un cuadripolo, un generador de
tensión de impedancia interna resistiva R a con una carga también resistiva R b.
Este podría ser el caso del amplificador de salida de un radio transmisor y la carga seria la antena
emisora.
Este cuadripolo debe estar diseñado de tal manera que intercalado entre la carga y el generador
produzca la adaptación de acuerdo con los teoremas anteriores
Además se le impone:
a) Que no consuma potencia (ya que nuestro propósito es la máxima transferencia de potencia).
b) Que introduzca una dada rotación de fase β.-
Podemos adoptar un circuito T o π.
Elegimos el π que es el más utilizado en la práctica como adaptador de antena.
Son datos: R a, R b y β.
Las incógnitas son: y1, y2 e y3
Por tratarse de un cuadripolo asimétrico y pasivo, la condición de adaptación se cumple haciendo
la impedancia imagen z01 = R a y la impedancia imagen z02 = R b.
Por tratarse de un cuadripolo π es más conveniente usar los parámetros de admitancia y por lo
tanto trabajaremos con la admitancia imagen.
De la Ec. [103] y de la tabla I.
Rb
Vg
+
Fig.39 cuadripolo π adaptador
Ra
y1 y3
y2
Ra
RbVg
+CuadripoloAdaptador deImpedancia

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 227/424
226
11
11
0101
1
z
y
z y == Pero
y
y z
Δ= 22
11
22
1101
.
y
y y y
Δ=∴ [106]
Lo mismo de la Ec. [104] y de la tabla I obtenemos:
11
2202
.
y
y y y
Δ= [107]
De la Ec. [105] y de la tabla I:
1122. y y
ytgh
Δ=γ [108]
Para que exista adaptación en ambos extremos debe cumplirse que:
a R y
101 =
b R y
102 =
Además por la Ec. [106] y [107]
1122
22110201 .... y
y y y
y y y y ΔΔ= ba R R
y y y.1. 0201 Δ=∴ [109]
Por lo tanto el determinante Δy debe ser un número real:
La matriz [y] del circuito π es:
[ ]ba R R
y y y y y y y y y
y y y y
.
1)).((
)(
)( 223221
322
221 =−++=Δ⇒⎥⎦
⎤⎢⎣
⎡+−
−+= [110]
Calculando el parámetro y11 del circuito:
32222111133221 ;... y yY y y y y y y y y y y +=+=⇒++=Δ∴
Luego por la Ec. [108]
)).((. 32211122
2
y y y y
y
y y
ytgh
++Δ
=Δ
=γ
Cálculo de y2:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 228/424
227
Por la Ec. [110]
22
2
y y
ytgh
+Δ
Δ=γ
22
222
2 ).(γ
γ tgh
y y y ytgh y y
Δ=+Δ⇒Δ=+Δ∴
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ −Δ=Δ−Δ=⇒Δ−Δ=∴ 2
2
2
2
22222 1..γ
γ γ
γ γ tgh
tgh ytgh
tgh y y y ytgh
y y
γ
γ
γ
γ
tgh
tgh
R R y
tgh
tgh y y
ba
2
2
2
21
..
11.
−=⇒
−Δ=∴
Peroγ γ
γ
senhtgh
tgh 11 2
=−
γ senh R R y
ba ..
12 =∴ ó γ senh R R z ba ..2 = [111]
Cálculo de y1:
De )( 3222 y y y += y)).(( 3221
2
y y y y
ytgh
++
Δ=γ
Esγ 2
2132
).()(
tgh y y y y y
+Δ=+ [112]
A su vez de [107]
02211
2211
22202
11
2202 .
.. y
y
y y
y
y y y
y
y y y
Δ=⇒
Δ=⇒
Δ=
Pero2
202
1
b R y = e 2111 y y y +=
221
221
.)(
b R y
y y y
Δ
+=∴ [113]
Peroγ 2
213222
)()(
tgh y y
y y y y
+
Δ=+= Por la Ec. [112]
Luego igualando [113] con [112]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 229/424
228
γ γ 2
222
21221
21 .)(
).(
1.
)(
tgh
R y y y
tgh y y
y
R y
y y b
b
Δ=+⇒
+
Δ=
Δ
+
γ γ γ tgh R
y y
tgh R R
R
tgh
R y y y
aba
bb
.
1
..
.2121 =+∴=
Δ=+∴ [114]
21 .
1 y
tgh R y
a
−=∴γ
Recordando la Ec. [111]
γ γ
γ
γ γ
γ
senh R R
R R
sh R senh R R senh R y
ba
ba
abaa .
.
.
cosh
..
1
.
cosh1 −=−=
γ
γ
sh R R
R R R y
ba
bab
..
.cosh.1
−=∴ ó
bab
ba
R R R
senh R R z
.cosh.
..1
−=
γ
γ [115]
Por último, calculamos y3:
y
y y
R y y y
b Δ+
==+)(
.1 2122232 Por la Ec. [113]
221
23)(
.1
y y
y y
R y
b
−Δ+
=∴
Pero
γ tgh R y y
a.
1)( 21 =+ Por la Ec. [114]
γ γ
γ
γ γ
senh R R
R R
senh R senh R R R R
tgh R R
y
ba
ba
ababa
ab ..
.
.
cosh
.
1
.
..
1
2
3 −=−=∴
γ
γ
senh R R
R R R y
ba
baa
..
.cosh.3
−=∴ ó
baa
ba
R R R
senh R R z
.cosh.
..3
−=
γ
γ [116]
Habíamos impuesto que el cuadripolo no consumiera potencia, luego debe ser α = 0.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 230/424
229
Por lo tanto se debe cumplir que:
β β α γ ω ω j j =+= )()(
Lo que significa que:
β senhj R R jX z ba ..22 == Por la Ec. [111]
Pero β β jsen senhj = y β β coscosh = j
Luego: β sen R R j jX z ba ..22 == β sen R R X ba ..2 =∴ [117]
Análogamente de la Ec. [115]
bab
ba
R R j R
senhj R R jX
.cosh.
..1
−=
β
β
bab
ba
R R R
sen R R X
.cos.
..1
−=∴
β
β [118]
Por último:
baa
ba
R R j R
senhj R R jX
.cosh.
..3
−=
β
β ∴
baa
ba
R R R
sen R R X
.cos.
..3
−=
β
β [119]
Veamos la rotación de fase:
Para 0 ≤ β ≤ 180º
Por ejemplo para β = 90º será
ba R R X .2 = De carácter inductivo
baba
ba R R R R
R R X ..
.1 −=−= De carácter capacitivo
baba
ba R R R R
R R X .
.
.3 −=−= De carácter capacitivo
Luego es:
ba R R X X X .321 ===
En este caso para β = 90º tenemos un adaptador de un cuarto de onda.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 231/424
230
Luego el circuito finalmente nos queda:
ba R R .
ba R R .
ba R R .

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 232/424
234
GRÁFICOS
DE
SEÑAL
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 233/424
235
ÍNDICE Pág.
Introducción……………………………………………………………………………………………….. 236
Definición………….…………………………... ....................................................................................... 237
Propiedades básicas de los gráficos de señal………………………………... …........................................241
Terminología utilizada en los gráficos de señal……………………………………………….……..……..241
Determinación de un grafo de señal de un sistema de ecuaciones…….........................................................245
Reducción de un diagrama…………………………………………………………………………………..249
Reglas para reducir diagramas……………………………………………………………………………...249
Formula de Shannon-Mason………………………………………………………………………………...264
Aplicación de la ley de los lazos para encontrar la transferencia entre dos nodos cualesquiera…………... 266
Inversión de grafos de señal...........................................................................................................................272
Diagramas de Coates o Diagramas “C”…………………………………………………………………… 278
Diferencia entre Diagramas “M” y “C”..........................................................................................................280
Formula de Coates-Desder…………………………………………………………………………………..283
Determinación del grafo C directamente del circuito………………………………………...…………..…288
Aplicaciones………………………………………………………………………………………………....289

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 234/424
236
GRÁFICOS DE SEÑAL
Introducción:
En el análisis de los sistemas realimentados de control, los especialistas en automatismos
emplean un símbolo simplificado denominado diagramas de bloques.
La combinación de diagramas de bloques y función de transferencia de un sistema físico,
proporciona una representación gráfica de la relación causa a efecto entre la entrada y la salida
de sistema.
Por ejemplo, la representación por diagrama de bloques de la relación entre la Transferencia y la
Excitación de un sistema está dada por la ecuación R(p) = T(p).E(p) y se ilustra en la figura 1.
Las flechas del dibujo significan que el diagrama de bloques es unidireccional (como un
amplificador electrónico), es decir las señales solo circulan en el sentido que indican las flechas.
E(p) R(p) Fig.1
Aunque todos los sistemas (de entrada y salidas únicas) pueden simbolizarse por un solo bloque
conectado entre la entrada y la salida, la ventaja del concepto de diagrama de bloques radica en
el hecho de que los servosistemas están compuestos por varios elementos independientes cuyasfunciones de transferencia se determinan individualmente.
Recordemos que los servosistemas o servomecanismos, son una clase de reguladores
automáticos que realizan la función esencial de mantener, una magnitud física de entrada al
sistema, regulada a la salida, es decir ajustada al valor de referencia (por ejemplo los reguladores
de Tensión y velocidad de un Grupo Motor-Generador).
Lógicamente que para que esto suceda, debe existir entre las variables del sistema (Tensión,
velocidad, etc.), una secuencia cerrada de relaciones causa – efecto que denominamos“realimentación”
Por lo tanto un sistema completo puede representarse por la interconexión de los bloques de los
elementos individuales, de forma que pueda evaluarse su contribución a las características
globales del sistema.
La sencilla configuración de la figura 1 es en realidad el elemento básico en la construcción de
diagramas de bloques complejos.
T(p)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 235/424
237
En la figura 2 por ejemplo, puede verse el diagrama de bloques de un servosistema típico.
Fig. 2
Cada bloque del diagrama representa un elemento independiente del sistema.
El diagrama de bloques de un servosistema complejo contiene normalmente muchas cadenas deretroalimentación y a su vez dichos bloques pueden tener funciones de transferencia tan
complicadas, que frecuentemente no puede realizarse un análisis detallado del sistema, desde los
puntos de vista de la transferencia de señales entre puntos del mismo y de los efectos que las
variaciones de los parámetros del sistema provocan, sobre características tales como ganancia,
impedancia y sensibilidad.
Los gráficos de señal también llamados diagrama de flujo debido a: S.J. MASON, pueden dar
una representación mas detallada de un sistema complejo que un diagrama de bloques.
Para los servosistemas, los grafos de señal no sólo representan la propagación de las señales por
el sistema, sino que también proporcionan una clara indicación de las cadenas de realimentación
que en él existen.
Pueden distinguirse dos tipos de diagramas.
1).- Diagramas de Mason (diagramas M).
2).- Diagramas de Coates (diagramas C).
Definición:
¿Que es un grafico de señal? Podemos contestar diciendo simplemente que es la representación
grafica de las relaciones entre las variables de un conjunto de ecuaciones algebraicas lineales.
Un grafo de señal es una red cuyos puntos de unión se denominan nodos; estos están unidos por
medio de curvas orientadas denominadas ramas o líneas.
La señal se propaga por una línea únicamente en la dirección de la flecha.
Consideremos un gráfico como en la figura 3., denominado diagrama de Mason (diagramas M).
Valor de
Referenc
R (p)
E(p)
E1(p)
Cadena de realimentación
Motor y Carga
Gc (p) A G1 (p)+
Amplificador -
R (p)
Elementoscompensadores
Medidor deError
ValorRegulado

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 236/424
238
Un diagrama M consta de dos tipos de elementos, los nodos y las ramas o líneas.
Cada nodo corresponde a una variable xk, dependiente o independiente y las líneas orientadas
gkj, relacionan dichas variables.
Este diagrama representa al siguiente conjunto de ecuaciones escritas en forma explicita:
∑=
= N
K
K Kj j x g x
1
siendo j = 1, 2…. N [1]
donde el coeficiente gkj llamado “transmitancia” o “función de transmisión”, representa la
contribución de la variable xk al valor de la variable xj.
El conjunto de ecuaciones pueden ser integro-diferenciales, es decir xk y xj pueden ser
funciones temporales, o ecuaciones transformadas en cuyo caso xk, xj y g son funciones de p en
este caso también el sistema de ecuaciones se escribe:
Efecto en j = ∑ (transmisión de k a j) x (causa en k)
La construcción de grafos de señal consiste básicamente en seguir las relaciones de causa efecto
a lo largo del sistema estableciendo la dependencia de cada variable consigo misma y con las
demás.
Por ejemplo la ecuación: 1122 x g x = [2]
Fig. 4
Se representa mediante el grafo de señal de la figura 4.
Los nodos x1 y x2 representan respectivamente las variables x1 y x2 y la línea orientada de x1 a
x2 , representa la dependencia de x2 respecto a x1 (pero no a la inversa).
x1 x2g12
Nodo NodoLínea
xj
g Nj
gkj
g2j
g1j
x N
xK
x2
x1
Fig. 3

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 237/424
239
La línea puede interpretarse también como un amplificador unidireccional de ganancia g12, de
manera que al aplicar una señal x1 a la entrada, la señal queda multiplicada por la de la línea
g12 y al nodo x2 se le aplica una señal de magnitud g12x1.
Consideremos como ejemplo el conjunto de ecuaciones de un cierto sistema:
3321122 x g x g x +=
4432233 x g x g x += [4]
4443342244 x g x g x g x ++=
4452255 x g x g x +=
El grafo de señal del sistema se ha construido en la figura 5.
Los nodos x1, x2, x3, x4, x5 se han colocado de izquierda a derecha.
Por la primera ecuación se ve que x2 depende de las dos señales g12x1 y g32x3 y en el gráfo de
señal de la fig. 5-a), la línea de ganancia g23 se ha dibujado del nodo x2 al x3 y el de ganancia
g43, se ha dibujado x4 a x3 (fig. 5-b), indicando la dirección de la línea por medio de una flecha.
x1 x2 x3
x4 x5
a)3321122 x g x g x +=
g12
g32
x2 x3 x4
x5
4432233 x g x g x += b)3321122 x g x g x +=
x1
g12
g32g43
g23

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 238/424
240
De forma similar, se ha definido la fig. 5-c a partir de la tercera ecuación.
La figura 5-d muestra el grafo de señal completo.
La línea de ganancia g44 representa la auto dependencia de x4.
x2 x3 x4
x5
x2 x3 x4 x5
c) 2321122 x g x g x += 4432233 x g x g x += 4443342244 x g x g x g x ++=
Fi . 5 Construcción del rafo de señal dado or las Ecs. 4
x1
x1
g12
g32
g23
g43
g34
g44
g24
g12
g32 g43
g23
g34
g24 g25
g44
g45

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 239/424
241
Propiedades básicas de los gráficos de señal.
A partir de aquí es conveniente resumir algunas de las propiedades importantes de los grafos de
señal.
a) Los nodos representan las variables del sistema.
Normalmente, los nodos se ordenan de izquierda a derecha siguiendo la sucesión de
causa a efecto a través del sistema.
Las variables que los nodos representan, pueden ser dependientes o independientes.
b) La línea orientada que va del nodo xk al x j representa la dependencia de la variable
x j respecto a la variable xk pero no a la inversa.
c) Las señales se propagan por las líneas sólo en la dirección de las flechas.
d) Al propagarse la señal xk por la línea que va de xk a x j queda multiplicada por la
transmitancia o ganancia gkj de dicha línea, por lo que al nodo x j, llega la señal gkj.xk .
Terminología utilizada en los gráficos de señal
En el tratamiento de los grafos de señal se emplean los siguientes términos:
1) Nodo transmisor: es aquel en el que el nodo representa una variable independiente y
por lo tanto las líneas salen de él. Ejemplo: el nodo x1 de la fig. 5).
2) Nodo receptor: es aquel en el cual el nodo representa una variable dependiente y por
lo tanto las líneas entran a él. Ejemplo: el nodo x5 de la fig. 5).
Sin embargo, el nodo receptor no siempre cumple esta condición.Por ejemplo, el grafo de señal de la fig. 6-a, muestra que el nodo tiene también una
línea de salida.
A fin de que se cumpla la condición enunciada, es necesario introducir una línea de
ganancia unidad y una variable x3 adicional, como se ve en la fig. 6-b.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 240/424
242
Esto indica, que todo nodo que no sea transmisor, puede convertirse en nodo receptor por medio
de la operación arriba mencionada.
Sin embargo, no puede utilizarse un procedimiento similar para convertir un nodo que no sea
receptor en nodo transmisor.
Por ejemplo, el nodo x2 del grafo de señal de la fig. 6, no reúne las condiciones de nodo
transmisor.Si intentamos convertirlo en nodo transmisor añadiéndole una línea de ganancia unidad
procedente de otro nodo x2 idéntico, resulta el diagrama de la fig. 7.
Sin embargo la ecuación del nodo x2 es ahora:
33211222 x g x g x x ++=
Que es distinta de:
3321122 x g x g x +=
Así pues, podemos llegar a la conclusión de que la única forma de convertir x2 en nodo
transmisor es replantear las ecuaciones originales del sistema de forma que x2 aparezca sólo en
el segundo miembro de las ecuaciones.
3) Trayectorias: cualquier sucesión continua y unidireccional de líneas recorridos en el
sentido que indican las flechas.
Ejemplo: x 1 - x2 - x3 - x4 - x5; x2 - x3 - x4; etc., en la fig 5-d.
x2
1
x3x2x1g32
g23g12
Fig. 7_ Intento de convertir a x2 transmisor
x1
1 x4
x3x2x1
g32
g23g12x3
x2g32
g23g12
a) grafo original b) Grafo modificado
Fig. 6_ Transformación de un grafo de señal

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 241/424
243
4) Trayectoria directa: es la que va desde el origen al nodo final a lo largo del cual no se
repite ningún nodo.
Ejemplo: x1 – x2 – x3 – x4 - x5 ó x1 - x2- a través de g24 - x4 - x5; ó x1 - x2 a través de
g25 - x5 en la fig. 5-d.
5) Lazos: trayectoria que empieza y termina en el mismo nodo y a lo largo del cual no
se repite ningún nodo, excepto el inicial y final.
Ejemplo: x2 - x3 - x2 - x3 - x4 - x3; x4 - x4 a través de g44.
Sin embargo x2 - x3 - x4 - x3 - x2 no es una trayectoria de realimentación, ya que x3 esta
repetido dos veces. (fig.5).
6) Ganancia de una trayectoria: el producto de las ganancias de todas las líneas quecomponen la trayectoria.
Ejemplo: g12.g23.g34 para la trayectoria x1 - x2 - x3 - x4 en la fig. 5-d.7) Ganancia de un lazo: El producto de las ganancias de todas las líneas que forman el
lazo.
Ejemplo: g23.g32 para el lazo x2 - x3 - x2;
g34.g43 para el lazo x3 - x4 - x3;y g44 para el lazo x4 - x4 en la fig 5.
8) Nodo de paso: es aquel en el que entra una sola línea y sale también una sola.
9) Nodo contributivo: Es aquel en el que entran varias líneas y sale solo una.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 242/424
244
10) Nodo distributivo: Es aquel en el que entran una sola línea y salen varias.
Los tipos 8) y 9) se denominan no esenciales.
11) Nodo esencial: Aquel en que la misma ganancia sale y entra nuevamente (pudiendo
haber otras líneas entrantes y salientes).
Ejemplo: el nodo x4 de la fig. 5 es un nodo esencial.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 243/424
245
Determinación de un grafo de señal de un sistema de ecuaciones.
Consideraremos un sistema de ecuaciones representativas de un circuito de tres mallas, con tres
incógnitas I1, I2, I3 y tres generadores de tensión e1, e2, e3, uno en cada malla.
1) 3132121111 I z I z I z e ++=
2) 3232221212 I z I z I z e ++=
3) 3332321313 I z I z I z e ++=
Trabajaremos con el grafico M.
Cada ecuación indica el estado en la malla correspondiente.
Debemos despejar una incógnita de cada ecuación, colocándola en función de las demás y de los
datos.
Elegimos para despejar, de la ecuación 1), a I1
nos queda:
311
132
11
12
11
11 I
z
Z I
z
Z
z
e I −−= (1’)
De la ecuación 2) despejamos I2:
322
231
22
21
22
22 I
z
z I
z
z
z
e I −−=
(2’)
De la ecuación 3) despejamos I3:
133
312
33
32
33
33 I
z
z I
z
z
z
e I −−=
(3’)
Dibujamos a continuación los tres nodos transmisores que corresponden a las tres fuentes e1, e2,
e3, y los tres nodos receptores correspondientes a las tres corrientes incógnitas I1, I2, I3.
Luego representamos los valores y sentidos de las líneas según las relaciones (1’), (2’), (3’),
resultando el siguiente gráfico de señal.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 244/424
246
Se sobreentiende que la forma geométrica del diagrama no tiene ninguna importancia.
Lo importante es conservar las relaciones de dependencia que existen entre las variables y
escribir los valores correctos de las ganancias para transferencias, recordando que siempre debe
cumplirse:
∑ ==
n
k k kj j x g x1
Siendo gkj las transferencias de las líneas que entran al nodo x j provenientes de los nodos xk .
Una características de los diagramas M es que el producto del valor de un nodo por una
transferencia que sale de él, tiene la dimensión de la magnitud que corresponde al nodo al que
llega esa línea.
Veremos como ejemplo para ilustrar la construcción de grafos de señal de sistemas lineales, el
caso de un amplificador con realimentación a través de la resistencia de carga.
La figura 9 representa el círculo lineal de un amplificador con realimentación.
E1 g e
e
g eμ
i p e1
R r p
g e 2e
e
≡k
Fig. 9
1/z333 I 3e
11
13 z
z −-z23/z22
-z32/z33
-z31/z33
-z21/z22 1e
111 z 1 I 2e2 I 22
1 z
Fig. 8

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 245/424
247
De estos dos circuitos vemos que:
)( pc f i Rk e ×= [5]
y ∴ ⇒×−= c p Rie2 k
ee
f −=2 [6]
Un conjunto de ecuaciones que define las relaciones causa a efecto del circuito puede ser:
f i g eee −= [7]
c
c
g f kR
r rp
ee ×
+
×=
[8]
k
ee
f −=2 [9]
Para plantear estas ecuaciones hemos elegido como variables del sistema e1, eg, ef y e2.
El grafo de señal correspondiente es el de las Fig. 10.
En este grafo de señal, la cadena de retorno de ef a eg muestra claramente el efecto de la
realimentación de tensión directamente de la salida a la entrada.
Fig 10. Grafo de señal que representa las ecuaciones [7],[8] y [9].
Normalmente las ecuaciones de un sistema físico pueden revestir distintas formas según lasvariables dependientes que se elija.
En este mismo problema si escogemos como nuevas variables a e1, eg, I p y e2, las ecuaciones del
circuito se transforman en :
pc g ikRee .1 −= [10]
c p
g
r r
ei p
+=
.μ
[11]
g e 1e 2e
k 1−
-1
f e
c pc
r r KR μ
+1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 246/424
248
pc i Re .2 −= [12]
Cuyo gráfico de señal es el siguiente:
Figura 11. Grafo de señal que representa las ecuaciones [10],[11] y [12].
En la fig. 11 se ha dibujado el grafo de señal correspondiente a estas ecuaciones.
Esto demuestra que el grafo de señal de un sistema no es único; por lo tanto pueden construirsevarios gráficos de señal para un mismo sistema, según como se hayan escrito las ecuaciones del
circuito.
e 2e
C R−
pi
c p r r KRc
+μ
11e
C kR−

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 247/424
249
Reducción de un diagrama
Es el conjunto de operaciones que se efectúa para llevar un grafo en el que solo existen nodo
transmisor y el nodo receptor.
Es decir, en el diagrama anteriormente visto se trataría de llegar a otro que solo contuviera los
nodos e1 (transmisor) y e2 (receptor).
donde T es la transferencia total del sistema entre los nodos e1 y e2.
1
2
e
eT =
Reglas para reducir diagramas.
Se ha definido la reducción un diagrama como el conjunto de pasos necesarios para
transformarlos en otros, que solo contiene un nodo transmisor y otro receptor, unidos por una
línea cuya transmitancia es la transferencia total del sistema entre esos nodos.
Las siguientes reglas permiten reducir cualquier diagrama combinándolas adecuadamente.
1) Composición en paralelo: si se conectan en paralelo dos líneas su transmitancias se
suman, tal como la ilustra la figura 12-b.
Debe observarse la fundamental diferencia entre esta composición y el lazo formado por las
transmitancias g12.g21 en la figura 12-c.
Las transmitancias ga y gb en la figura 12-a no forman lazos, sino señalan dos caminos paralelos
entre x1 y x2, equivalente a uno sólo cuya transmitancia es la suma de las dos.
Fig.12. Composición en paralelo de transmitancias
a 12 g
≡ 1 x 2 1 x 2 x
1 2
b b)c)
ba +
21 g a)
e1 T e2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 248/424
250
2) Eliminación del nodo de paso
Esta regla se justifica recordando que, por definición:
2233 . x g x = ∴ x3 = g12.g13.x1
12122 . x g x =
3) Composición en cascada: El grafo de la figura 13-a establece las siguientes relaciones
entre las variables x1, x2, x3 y x4.
1212 . x g x = 2323 . x g x = 3434 . x g x =
Sustituyendo la primera en la segunda se obtiene:
121323 x g g x =
Y luego sustituyendo en la tercera:12132434 x g g g x =
Eliminando de este sistema los nodos x2 y x3 se obtiene la relación reducida entre x1 y x4.
1144 xG x = x1 G14 x4
Donde: G14 = g43 g32 g21
De ello se deduce la posibilidad de eliminar nodos intermedios en un grafo en cascada,
multiplicandos las transmitancias de las sucesivas ramas.
g12g23 g23 g12
≡1 31 32
12 g 43 g
32 g
21 g
56 g
25 g
12 g 43 g 32 g 21 g
43216
5
43
2
1
a
bFig. 13

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 249/424
251
Si se aplican las reglas de composición lineal a los nodos del grafo de la fig. 13-b resulta:
1122 x g x =
2231133 x g x g x +=
3344 x g x =
4452255 x g x g x +=
5564466 x g x g x +=
Eliminando de este sistema los nodos x2, x3, x4 y x5 se obtiene la relación reducida entre x1 y x6.
1166 xG x =
x1 G16 x6Donde:
1223344556133445561225561223344613344616 g g g g g g g g g g g g g g g g g g g G ++++=
El examen del grafo de la fig. 13-b permite comprobar que la G16 hallada, es la suma de todos los
caminos abiertos entre los nodos x1 y x6, aplicándose en cada uno la regla de composición en
cascada de las transmitancias.
Esta regla es completamente general por ser la consecuencia directa de las leyes distributivas de
la suma y del producto que rigen a las composiciones en paralelo y en cascada respectivamente,
de las transmitancias y se aplican a grafos sin lazos de realimentación.
4) Eliminación del nodo contributivo:
Justificación:
2231133 x g x g x += ⇒ 23423134134 x g g x g g x +=
3344 x g x =
3423 g g
3413 g g
34 g 23 g
13 g
3 42
1
4
2
1
≡

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 250/424
252
5) Eliminación del nodo distributivo:
Justificación
x3 = g23 x2 x3 = g12g23 x1
x4 = g24 x2 ⇒
x4 = g12g24 x1 z2 = g12 x1
6) Eliminación del nodo contributivo - distributivo:
Justificación
x2 = g25 x5 x2 = g15 g52 x1 +g35 g52 x3
x4 = g54 x5 ⇒ x4 = g15 g34 x1+ g35 g54 x3
x5 = g15 x1+g35 x3
12 g
23 g
12 g
4
1
3
15 g
4
3
2
1
54 g
52 g
35 g 5
4
5415 g g 5435 g g
5235 g g 5215 g g
3
2
1
4
3
1≡
2312 g g
2312 g g
≡

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 251/424
253
7) Eliminación de un nodo contributivo: habiendo una realimentación que llega desde el
receptor:
El nodo 2 se elimina inmediatamente según la regla 2)
7`) Una variante posible es eliminar el lazo de realimentación creando el lazo propio en el
nodo 2)
Justificación de la regla 7’)
x2 = g12 x1 + g32 x3 x3 = g12 g23 x1+ g32 g23 x3 ⇒ x3 (1-g32 g23) = g12 g23 x1
x3 = g23 x2
Esta relación se cumple en el diagrama reducido.
Puede observarse que cuando aparece un lazo propio de transmitancia g.
La transmitancia total del grafo es la misma que había si le lazo no existiera y las líneas entrantes
al nodo esencial dividieran sus transmitancias por
(1-g) = diferencia de retorno
3223 g g
2312 g g
31
3223 g
3223 g g
23 g 321 12 g
1
32231
23123 x
g g
g g x
−=
≡
32 g
23 g
12 g
321321
12 g 23 g

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 252/424
254
1
8) El mismo caso que 7), pero con la realimentación que vuelve al nodo transmisor:
Luego se elimina el nodo 2 por la regla 2):
Las reglas 7 y 8 tienen en común la transformación de un nodo no esencial.
Pero también puede verse como el desdoblamiento de un nodo no esencial.
Todo ocurre como si el nodo 2 se desdoblar en 2` y 2``, ambos nodos de paso se eliminan.
9) Desdoblamiento de un nodo esencial:
El nodo 2 se desdobla en 2’ y 2” , conservando ambos el lazo propio.
El nodo 3 queda transformado en esencial.
1221 g g
12 g 23 g 23 g 12 g
21 g
3 22 11
≡ 3
32 g
23 g
23 g 23 g
22 g
22 g
12 g 12 g
2’’
33 2’2 1
≡ 32 g
22 g
1
32 g
23 g
12 g 23 g
32 g
12 g
2’’
33 2’2 11
≡
32 g
2812 g g
1221 g g
31

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 253/424
255
Se cumple que:
1322322
23121
22
3223
22
23123 1
)]1
1/()1
[( x g g g
g g x
g
g g
g
g g x
−−=
−−
−=
Justificación a través del diagrama inicial:
3322221122 x g x g x g x ++= ⇒ 3321122222 x g x g x g x +==
2233 x g x =
322
321
22
122 11
x g
g x
g
g x
−+
−=∴
Luego
322
32231
22
23122233 11
x g
g g x
g
g g x g x
−+
−==
=−
−∴ 322
32233 1
x g
g g x
1
22
2312
1 x
g
g g
− ⇒ =
−− )
11(
22
32233
g
g g x
1
22
2312
1 x
g
g g
−
Finalmente:
1
22
3223
22
2312
3
11
1 x
g
g g
g
g g
x
−−
−=
⇒ 322322
2312
1
3
1 g g g
g g
x
x
−−=
32 g 23 g
22 g
22
3223
1 g
g g
−
2’’
2322
12
1 g
g
g ⎟⎟
⎠
⎞⎜⎜⎝
⎛
−2322
12
1 g
g
g ⎟⎟
⎠
⎞⎜⎜⎝
⎛
−
≡
1 1 33

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 254/424
256
10) Descomposición de un nodo contributivo-distributivo en uno contributivo y otro
distributivo.
Como vemos dicha descomposición se efectúa agregando una transferencia unitaria.
Vamos a ver como ejemplo la reducción del siguiente grafo de señal.
1º paso: Eliminamos el nodo 3 aplicando la regla 8
2º paso: Eliminamos en nodo 4 aplicando la regla 7.
24 g
56 g 35 g
45 g 32 g 23 g
3
12 g 24
5
6
54 g
00≡
1 1
1
154 g
3523 g g 45 g
2
12 g 4
5 6
24 g
3223 g g
2
3523 g g
5
4524 g g
5445 g g
3223 g g
56 g
1 12 g
6

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 255/424
257
3º Paso: Aplicando la regla 1 a las líneas g24g45 y g23g35
4º paso: recordando que las líneas entrantes a los nodos esenciales dividen sus transferencias por
las diferencias de retorno de los lazos correspondientes tenemos la transferencia total del grafo
de señal.
156
5445
3223
352312452412
6 .)1(
)1( x g
g g
g g
g g g g g g
x−
−
+
=
∴ )1)(1(
)(
54453223
563523452412
1
6
g g g g
g g g g g g
x
x
−−
+=
Obtención del grafo de señal a partir del circuito
Una forma de obtener el grafo de señal es la que se ilustra con el siguiente ejemplo:
En el nodo 2 se cumple:
11
21 I Z
V V =
−
∴
1121 I Z V V =−
⇒
1112 I Z V V −=
1
6)35234524)(
3223112( g g g g
g g
g +
−
5445 g g
556 g
235234524 g g g g +
5445 g g 3223 g g
61
12 g
5 56 g
I1 VI
Z1 Z3 Z5
Y2 Y6 Y4 I3 I5
2 3 4

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 256/424
258
Análogamente:
3323 Z I V V −= y 5534 Z I V V −=
Luego el sistema de ecuaciones de tensiones del circuito es:
1112 I Z V V −= [13]
3323 Z I V V −= [14]
5534 Z I V V −= [16]
Escribimos ahora el sistema de ecuaciones de las corrientes
I1 = I3 + V2Y2 [17]
I3 = I5 + V3Y4 [18]
I5 = V4Y6 [19]
Se pasa ahora a representar las relaciones entre variables mediante el grafo de señal
Según cual sea el nodo que se tome como transmisor y el que se toma como receptor, el
diagrama nos permite calcular:
La transferencia de tensión1
4
V
V o la impedancia de entrada
1
1
I
V , etc.
Y6
Y4Y
-Z5 -Z3 -Z1
I5 I3 I1
V4 V3 V2
V1
1 11
11

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 257/424
259
Veremos ahora el efecto de un agregado en el circuito inicial sobre el grafo de señal.
La ecuación [18] se transforma.
7
314353 )(
Z V V Y V I I −++=
Agregándose al grafo de señal anterior las líneas punteadas
Puede comprobarse que el agregado de un elemento deja invariados los demás elementos del
grafo de señal.
Otro método posible, adopta una sistematización de manera que no es necesario escribir las
ecuaciones.
Se comienza por elegir un árbol del circuito dado, es decir un grafo que une todos los nodos del
circuito del físico, sin cerrarse.
Para el mismo circuito del ejemplo anterior, un árbol posible es el que se indica con línea llena:
432
I3 I5
Z7
1Z1
Y2
Z3
Y4 Y6
Z5
I1
V1
7
1
Z
7
1
Z
−
I5 I3 I1
V4 V3 V2 V1
-Z2 -Z3 Y Y6 -Z5
1 1 1
11
0
4
32
1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 258/424
260
Se impone la condición de que en el árbol estén todas las ramas que contienen fuentes de tensión
y ninguna de las que contienen fuente de corrientes.
Las ramas del circuito faltantes en el árbol, constituyen el coárbol (al que se indica con línea de
trazos).
El trazado del grafo comienza dibujando los nodos, que representan las tensiones en ramas delárbol y las corrientes en las ramas del coárbol.
En nuestro caso, las tensiones V1, V2, V3 y V4; y las corrientes I1, I3 e I5.
Luego se escriben las tensiones en ramas del coárbol en función de las tensiones en ramas del
árbol y las corrientes en las ramas del árbol, en función de las corrientes en las ramas del
coárbol.
El diagrama se completa vinculando variables mediante las impedancias de las ramas del árbol y
las admitancias de las ramas del coárbol.El grafico a que se llega se denomina primitivo.
En nuestro ejemplo la aplicación de estas reglas lleva al siguiente grafo primitivo.
Este diagrama representa las mismas relaciones circuitales que el obtenido por el otro método.
Aunque es más fácil de deducir, resulta más complejo pero puede reducirse fácilmente, ya que
los nodos que no estaban en el diagrama anterior se eliminan inmediatamente mediante las reglas
conocidas.
Otro método para terminar los grafos de señal directamente del circuito, se puede realizar
eligiendo en forma intuitiva las variables a considerar, adoptando las variables para los nodos
“transmisor” y “receptor” de acuerdo al problema a resolver.
Las dependencias entre dichos nodos se determinan por la inspección del circuito y sus
transferencias, se calculan por sus derivadas parciales.
En efecto, si tenemos un nodo como el indicado:
3
1
Z 5
1
Z 1
1
Z
21Y
4
1
Y 6
1
Y
I5
I4
I3
I2
I1
V34 V23
V12
V4 V3
V1
-11-11
-11-1
1-11
V 2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 259/424
261
Se puede escribir
4423321122 x g x g x g x ++= Donde las transferencias de las trayectorias tienen por expresión
1212
x x g ∂∂=
; 3232
x x g ∂∂=
; 4242
x x g
∂∂=
Veamos un ejemplo: Sea el siguiente circuito con una fuente controlada (representativo de un
amplificador):
Reagrupando:
Se adoptan las variables dependientes e independientes.
Nosotros tomaremos:
V1: independienteEg; I; V2: dependientes
V2
R’3
R 2 2
V1
R 1
1
I = gmegR’3 = rp//R3
0
R 1
0
R 2
V1
gmeg
1 2
rp+ R 3
4 x
32 g
42 g
25 g 2 x
3 x
1 x 5 x
12 g

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 260/424
262
El gráfico se traza por inspección del circuito.
Las transferencias a, b, c y d se determinan de la siguiente manera
bI aV E g += 1 ∴ tecons I
g
V
E a tan
1=∂
∂=
La condición I = constante, equivale a anular la fuente de corriente en el circuito incremental,
quedando:
Circuito 1
321
32
1 '
'
R R R
R R
V
E a
g
++
+=
∂
∂=
Luego para el cálculo de 0
11=
∂
∂= V
g
V
E b se anula la fuente de tensión V1 y haciendo el
equivalente de Thevenin en la fuente de corriente nos queda:
321 ' R R RVThi
++=
iE g
R’3
R 2
R 1
g
3' IRV Th =+
2V
m g
g E
1V
a
I
c b
d
+i
E g R’3
R 2
V1
R 1
g

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 261/424
263
1iR E g −=
⇒++
−= 1321 ' R
R R R
Vth E g
321
13
'
'
R R R
R IR E g ++
−=
=∂
∂=∴1 I
E b g
321
13'
' R R R
R R
++−
Para el cálculo de c y d se debe partir de la otra ecuación.
cI dV V += 12
Luego para el cálculo de c tomamos el circuito 2
02 1=∂∂
= V I
V c ⇒ =+−= )( 212 R RiV =+++− )(' 21
321 R R
R R R
VTh
( )'321
21
'
3 R R R
R R IR
++
+−
=∂
∂=∴
I
V c 2
321
213
'
)('
R R R
R R R
++
+−
Para el cálculo de d tomamos ahora el circuito 1… 01
2=∂
∂= I
V
V d
32 '. RiV = Pero
321
1
' R R R
V i
++
= ⇒
321
312
'
'
R R R
RV V
++
=
321
3
1
2
'
'
R R R
R
V
V d
++=
∂
∂=∴

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 262/424
264
Fórmula de Shannon-Mason
Esta fórmula nos permite hallar la transmitancia de un diagrama M entre dos nodos cualquiera,
sin reducirlo, lo que presenta ventajas apreciables en gráficos complejos.
Se basa en la ley de los lazos, que determinan el valor de la transferencia de un lazo cualquiera.
Ejemplos:
1)
2)
3)
De (1) 21 1 xa
e x
−= y reemplazamos en (2)
3232322
111
11
x
a
be
d xdx
a
be xdx x
a
be x
−−
=⇒=⎟ ⎠
⎞⎜⎝
⎛ −
−→+−
=
1
3
c
de
a b
2
23
312
211
cx x
dxbx x
exax x
=
+=
+=
)3(
)2(
)1(
≡
a
≡ 12
21
bx x
ax x
=
= ⇒ a.b=1
2 x 1 x
b
c
≡ 12
121
cx x
axbx x
=
+= ⇒
212
21
1
.1
xa
bccx x
xa
b x
−==
−=
1
a
2
b
1
1
=
−
∴a
bc

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 263/424
265
⇒
−−
= 22
11
x
a
be
cd x
1
11
=
−−
a
be
cd
[4]
De donde cualquiera sea el número de lazos del sistema, la transferencia cerrada es siempre igual
a 1.
Además se deduce de [4]:
)(1 acd abecd −+++= [5]
Esta conclusión debe generalizarse enunciándola de la siguiente manera.
En todo circuito cerrado se cumple que la suma de las transferencias de los lazos, tomados de a
uno, menos la suma de los productos de las transferencias de los lazos que no se tocan, tomados
de a dos, más la suma de los productos de las transferencias de los lazos que no se tocan tomados
de a tres, etc. vale la unidad (Ley de los lazos) de donde en general:
∑ ∑ ∑ ++−= ......1 k ji jii L L L L L L [6]
Ejemplos:
En este caso aplicando la [6] tenemos:
acdjhcdjhbehjbefg ajhafg adc jh fg cd bea +−−−−−−++++=1
2)
54
321
hfc ba
ed
g j
VgV1
I5
-G3 Z1
G3 -G3
R 4
μZ2 R 4
Z1
I2 Y2
I3
V4
-Y2
Z1
-G3 V6
∝Y1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 264/424
266
Aplicando la Ec. [6]:
1341132231114321 Z G RY Z G Z Y G Z Z Y RGY Z i L α μ α −+−+−−=∑
432143 RGY Z RG L L ji α −=∑
43214313411322311143211 RGY Z RG Z G RY Z G Z Y G Z Z Y RGY Z α α μ α +−−+−+−−=∴
Aplicación de la ley de los lazos para encontrar la transferencia entre dos nodos cualesquiera
Se trata de llevar el gráfico a una configuración cerrada por medio del agregado de una rama
adicional que cierre el camino entre el nodo transmisor y el nodo receptor.
Ejemplo: Sea el siguiente grafo de señal correspondiente a un circuito de dos mallas:
Este es un grafo de señal abierto, que cerramos mediante el agregado de la rama a:
Aplicando la ley de los lazos (Ec. [6] ) resulta:
42314143211 Y Y Z Z aY Z Y Z Y Z −+−−−=
Pero:
aV
V T
1
1
3 ==
Y2 Y4 -Z1
1I1
1 V2 V3
I2
-Z3
V1 1
V1
Y2 Y4 -Z1
1I1
1 V2 V3
I2
-Z3
a
1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 265/424
267
Relación que podemos despejar de la Ec. [7]
42314143211
3
1
11
Y Y Z Z Y Z Y Z Y Z aV
V
++−+==
Hallaremos una expresión general. Llamaremos:
∑ ∑ =+−+∑−= 0....1 k ji jii L L L L L L H
Además
0')0( =+= aH H H
Donde H(0) es la suma de términos que no contienen a “a” ya
H H
∂
∂='
siendo a =Transferencia de la rama adicional.
La transferencia buscada será:
)0(
'1
H
H
aT −== [8] Fórmula de SHANNON-MASON
Ejemplo: Determinar la impedancia de entrada1
1
I
V Z e = en el grafo del ejemplo anterior.
La rama a cierra el camino entre el nodo transmisor V1 y el nuevo nodo receptor I1.
La ley de los lazos establece:
01 423143242434121 =+−−−+++= Y Y Z Z Y Z aY aY aY Y Z Y Z Y Z H
4231414321)0( 1 Y Y Z Z Y Z Y Z Y Z H ++++=∴
)(' 43242 Y Z Y Y Y H ++−= ∴ ')0(
1
1
H
H a
I
V Z e ===
α
Y2 Y4 -Z1
1I1
1 V2 V3
I2
-Z3
V1 1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 266/424
268
42342
4231414321)0( 1
' Y Y Z Y Y
Y Y Z Z Y Z Y Z Y Z
H
H Z e ++
++++=
−=
Ejemplo: La figura siguiente muestra un diagrama funcional de bloque de un sistema de control
y a continuación se representa su grafo de señal.
Nótese que no se indican todas las variables.
Como E1 = M1-B1 = G1.E - H1.M2, no es necesario mostrar M1 y B1 explícitamente.
Este ejemplo es el de un sistema mas bien complejo, de manera que puede esperarse que la
ecuación resultante sea también compleja.
Sin embargo la aplicación de la formula de Shannon Mason produce la transferencia total de una
manera sistemática.
Este sistema tiene seis lazos cuyas transmitancias son:
-G2H1, -G5H2, aG1G2G3G5, aG1G2G4G5, –G1G2G3G5 y -G1G2G4G5
∑ −−++−−= 54215321542153212512 GGGGGGGGGGGaGGGGaG H G H G Li
∑ −−= ))(( 2512 H G H G L L J I
- B1 B2
E2
-+
+ M1 +
-
+ G1 G2 G3 G5
G4
H2 H1
e
B
E
2 E
a
-1
-H1
1 RR G5
-H2
G
G3
G2G1 E1eE1
M

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 267/424
269
Aunque hay cuatro lazos no hay ninguna terna de lazos que no se toquen por tanto:
∑ = 0k ji L L L
Luego la transferencia global de “e” a “R” es:
)0(
'1 H
H
ae
RT −==
∑
++
+−−+−=∑+−=
54215321
251254215321251211
GGGGGGGG
H G H GGGGaGGGGaG H G H G L L L H jii
=)0( H 54215321251225121 GGGGGGGG H G H G H G H G +++++
54215321' GGGGGGGG H −−=
==)0(
'
H
H T
5421532125122512
54215321
1 GGGGGGGG H G H G H G H G
GGGGGGGG
+++++
+
Veamos un ejemplo mas completo: Sea el circuito que a continuación se representa y que se
considera formado por elementos R, L, C que pueden representarse por medio de funciones
admitancia o impedancia Y(p) y Z(p) respectivamente.
≡
La transformada de Laplace de la tensión de entrada se designa por Een(p) y de la tensión de
salida por Es(p).
Een(p)
+
Z4(p)
I2(p)
Y3(p)
Es(p)Z2(p)
Y1(p)I1(p)
Figura 14 a
a-Y1
1 EsEs
-Z2
Y3Z2 I1
-Y3
I2 Z4 E2 YEen
Figura 14 b

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 268/424
270
Si empleamos las intensidades de rama y las tensiones de nodo indicadas en el circuito, el
conjunto de ecuaciones independientes es:
[9]
Que representan las relaciones de causa a efecto del circuito (se sobreentiende que todas las
funciones lo son de p).
El grafo de señal de la figura 14-b se ha construido ordenando las variables Een, I1, E2, I2, y Es, de
izquierda a derecha.
De este ejemplo y de otros vistos anteriormente podemos deducir que las ecuaciones adecuadas
para los grafos de señal no son las de mallas ni las de nodos, empleados, generalmente, en el
análisis de circuitos.
Vemos en este ejemplo que combinando en las ecuaciones las intensidades de rama y las
tensiones de nodo, se puede dibujar directamente el grafo de señal a partir de dichas ecuaciones.
Por otro lado hemos visto también que si se dispone de las ecuaciones de mallas o de nodos
como únicos datos, en primer lugar debemos reagrupar los términos de las ecuaciones de forma
que los efectos aparezcan en el primer miembro de las ecuaciones y las causas en el segundo, ya
que originalmente no están en la forma correcta causa-efecto.
Se puede ver fácilmente que para describir el circuito e la figura 14-a se precisan solo dos
ecuaciones de malla.
En cambio el grafo de señal correspondiente a las ecuaciones de mallas reordenadas tendrá
menos nodos y líneas que el de la Fig. 14-b) pero las transmitancias de línea serán más
complejas.
De hecho la ventaja del grafo de señal de la fig14-b) reside en que cada línea contiene en los
términos de la transmitancia a un solo elemento, admitancia o impedancia.
Veremos ahora el cálculo de la transferencia de tensión.
.
entr
sal
E
E T = aplicando para ello la
fórmula de Shannon-Mason.
Para ello en la figura 14-b, cerramos el gráfico con la línea de puntos que va de Es a Ee y de
transmitancia a.
24
323
2212
121
)(
)(
)(
I Z E
Y E E I
Z I I E
Y E E I
s
s
en
=−=
−=
−=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 269/424
271
Por tanto:
sen aE E = ⇒ )0(.
. '1
H
H
a E
E
ent
sal −==
En este grafo existen cuatro lazos cuyas transmitancias son:
(Z2)(-Y1); (-Z2)(Y3); (Z4)(-Y3); (a)(Y1)(Z2)(Y3)(Z4).
Luego:
∑ =i L 4321343212 Z Y Z Y aY Z Y Z Y Z +−−−
∑ = ji L L 3412 Y Z Y Z
0∑ =k ji L L L
Por lo tanto:
01 31424321343212 =+−+++= Y Y Z Z Z Y Z Y aY Z Y Z Y Z H
3142343212)0( 1 Y Y Z Z Y Z Y Z Y Z H ++++=
4321 Z Y Z Y H −=
Luego:
=−==)0(.
. '
H
H T
E
E
ent
sal
3142343212
4321
1 Y Y Z Z Y Z Y Z Y Z
Z Y Z Y
++++

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 270/424
272
Inversión de grafos de señal:
La inversión de diagramas de flujo permite expresar un sistema dado de ecuaciones lineales
convirtiendo las variables dependientes en independientes y viceversa, pero conservando las
relaciones de causa a efecto originales.
Veremos algunas reglas de inversión de trayectorias y lazos.
1) Inversión de una trayectoria:
23
12
bx x
ax x
=
=
≡ 22
21
1
1
xb
x
xa
x
=
=
2) Inversión de una línea :
El hecho de que un nodo particular de un grafo de señal sea un nodo generador se debe a como
se hayan escrito las ecuaciones representadas por el grafo.
Reordenando las ecuaciones, lo que era un nodo generador puede convertirse en nodo nogenerador y recíprocamente.
Específicamente, consideremos una ecuación que dé x2, la cual se reordena para dar x1,
explícitamente de la manera siguiente:
4312 cxbxax x ++=
43211
x
a
c x
a
b x
a
x −−=
-1/ax1 x1
x3
x4
x2
-b/a
x4
x3
c
a
b
-c/a
≡
Figura 15 a Figura 15 b
x2
1/a 1/b bx x3 x2a
≡x1 x3 x2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 271/424
273
El grafo correspondiente a la primera ecuación es el de la figura 15-a).
Análogamente, el grafo correspondiente a la segunda ecuación es el de la figura 15-b).
Fijémonos en la línea original de la transmitancia a que va desde x1 a x2.
En el grafo modificado se ha invertido el sentido y el valor de la transmitancia en el reciproco
del anterior.Observemos que ha sucedido al mismo tiempo con las otras líneas.
El que originalmente iba a x2 desde x3 se ha dirigido ahora hacia x1 y su transmitancia se ha
dividido por la de la línea que se invirtió, cambiada de signo.
Lo mismo le ha sucedido a la línea que originalmente llegaba a x2 desde x4.
En la ecuación vemos que cualquier otra línea que llegara a x2 sufriría la misma transformación.
El resultado de este proceso recibe el nombre de inversión de una línea.
Esta puede realizarse para cualquier línea que parta de un nodo transmisor o generador con elresultado de que este se convierte en un nodo receptor.
3) Inversión de las ramas que concurren a un nodo contributivo:
412 cxax x += a) ≡ 421
1 x
a
c x
a x −=
b)
32
1 x
b x =
Las ecuaciones a) y b) son equivalentes, dado que expresan las mismas relaciones, como puede
comprobarse fácilmente. En un nuevo grafico, el nodo transmisor x1 ha pasado a ser receptor y
viceversa.
1/ax1 x1
x3
x4
x2
1/b
x4
x3
c
a
b
x2
-c/a
≡
23 bx x =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 272/424
274
4) Inversión de líneas o ramas que concurren a un nodo distributivo
211
xa
x =
123 caxcx x == ≡ 321
xc
x =
124 baxbx x == 24 bx x =
5) Caso en que hay un nodo esencial o lazo general.
En el primer grafo:
34 dx x =
312 cxax x +=
23 bx x =
Transformemos el nodo 1 en receptor, es decir, transformemos x1 en variable dependiente.
El lazo desaparece dando lugar a dos transferencias en paralelo.
Operando se obtiene:
34 dx x = 431
xd
x =
312 cxax x += 321 x
b x =
3211
xa
c x
a x −=
44431
11
.
1 xad
c
xabd xd a
c
xab x −=−=∴
-cc
x4 x4
1/a 1/b b
x1 x3 x2
a
x1 x3 x2
d 1/d
1/ax1
x1
x3
x4
x2
1/c
x4
x3
b
a
c
x2
b
≡
12 ax x =
23 bx x =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 273/424
275
Quedando finalmente:
41 )1
(11
xcbd a
x −=
Resultando el siguiente grafo que responde a la última ecuación, el cual resulta más conveniente
que el anterior, por haber desaparecido el lazo.
Se observa que la línea c ha cambiado el signo de su transferencia, pero no su sentido.
Puede efectuarse el mismo proceso con una trayectoria constituida por un número cualquiera de
líneas que vayan de un nodo transmisor a otro nodo.La inversión se efectúa en una línea cada vez partiendo desde un nodo transmisor.
Vemos como ejemplo el caso de un circuito amplificador con retroalimentación de la figura 16.
La resistencia total de salida es R 3.
Figura 16
Escribimos las siguientes ecuaciones:
23
1V
R I =
I pc
V V b1
2 −=
I RV gR I gV RV aab 222 )( −=−−=
21 aV V V a +=
El grafo de señal representativo de este sistema de ecuaciones en el representado en la fig. 17-a)
donde se han representado los valores de transmitancias con símbolos, genéricos a, b, c etc.
V-
+
gVa
+
-
C
I
( ) 31 Ra−
aR 3
R 2 Va +
+
V2V1
-
⎟ ⎠
⎞⎜⎝
⎛ − c
b
1
x4
1/a
x1 x3x2
1/d

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 274/424
276
Se desea invertir el camino de V1 a I.
Se invierte primeramente el nodo a , lo que conduce a la Fig. 17-b.
[fig 17]
I
1/a bf
cV2
Va
V
V1
b)
eg
-d/a
I
bf
d
cV2
Va
V
aV1
a’)
eg
a
1
pc
1−
V2
3
1
R-R 2
Va -gR 2
V
I
1V1
a)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 275/424
277
Ahora Va es el nodo transmisor, por tanto puede invertirse el V b, lo que nos lleva a la figura
17-c.
Análogamente, pueden invertirse las líneas c y e en este orden.
El grafo de señal final, con el camino invertido es el representado en la figura 17-d.
[fig. 17]
Obsérvese que el grafo original de la figura 17-a, tiene tres lazos de realimentación.
En cambio el grafo con la trayectoria invertida es un grafo en cascada, que no tiene lazos de
realimentación.
Indudablemente es un grafo de señal, más sencillo.
I
-g/b
1/a
1/b
-f/c
1/cV2
Va
V
V1
d)
1/e
-d/a
I
e
-g/b
1/a
1/b
f
cV2
Va
V
V1
c)
-d/a

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 276/424
278
Diagramas de Coates o Diagramas “C”
En estos diagramas las ecuaciones se representan en forma implícita a diferencia de los grafos
M, que se expresaban en forma explicita.
Cada nodo no indica una variable, sino una ecuación que corresponde a dicha variable.
Ejemplo: Tenemos un sistema de ecuaciones de malla.
1313212111 e I Z I Z I Z =++
2323222121 e I Z I Z I Z =++
3333232131 e I Z I Z I Z =++
O sea:
01313212111 =−++ e I Z I Z I Z
02323222121 =−++ e I Z I Z I Z
03333232131 =−++ e I Z I Z I Z
Veremos ahora el procedimiento para la construcción del diagrama C en base al último sistema
de ecuaciones:
1) Asignamos arbitrariamente una ecuación a cada nodo del grafico, por ejemplo, el
nodo 1 de la ecuación 1, etc.
Decimos entonces que la primera ecuación representa al nodo 1 e igual para las
demás ecuaciones.
2) Se toma un nodo 0 como referencia. Este es el nodo transmisor general.Todas las tensiones salen de él.
3) Del nodo 0 al nodo 1 llevamos una línea de transferencia correspondiente a la
tensión aplicada a la malla 1 pero con signo cambiado.
Hacemos lo mismo con los otros dos nodos.
4) En cada nodo aparecen lazos propios, correspondientes a las causas que pertenecen a
la misma malla.
Tienen valores Z11 para el nodo uno, Z22 para el dos y Z33 para el tres.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 277/424
279
5) Se agregan como líneas entrantes a cada nodo, los provenientes de la influencia de las
otras mallas.
Por ejemplo: al nodo uno entran las transferencias Z12 (provenientes del nodo dos) y
Z13 (provenientes del nodo 3).
Obtenemos para nuestro caso el siguiente diagrama.
En este diagrama, recordamos, cada nodo representa no una variable sino una ecuación que se da
en forma implícita.
Se obtienen en general diagramas mas cerrados que los de Mason.
En los diagramas de Coates, además, siguen valiendo las reglas de reducción vistos para
diagramas M, excepto, en lo referente a la reducción de un lazo propio.
-e3
-e2
-e1
Z33
I3
I1
Z31
Z11 Z22
Z21
Z12
Z13
Z 23
Z32
I2
Figura 18

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 278/424
280
Diferencia entre Diagramas “M” y “C”
La única diferencias entre estos dos diagramas, en lo que se refiere a reglas de reducción, es el
tratamiento de un nodo esencial.
Veremos dos casos:
A) Dado el nodo esencial en el diagrama M hallar el diagrama C equivalente.
12 1 xb
a x
−=
≡ 13 1
xb
ac x
−=
23 cx x =
Para hallar el equivalente C debemos buscar un el diagrama C que reducido me dé igual al M
reducido dado.
La solución es la siguiente:
0221 =−+ xbxax
23 cx x = ≡ 13 1
xb
ac x
−−=
Como vemos estos diagramas son equivalentes porque son iguales las expresiones reducidas
x3/x1.
1
c b
a
x3x2x1
Diagrama C equivalente
≡
x3 x1
b
ac
−1
Diagrama C reducido
x3 x1
c
b
a
x3x2 x1
b
ac
−1
≡
Diagrama M Diagrama M reducido

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 279/424
281
De las diferencias de expuestas se deduce la regla de pasaje de diagrama M al C:
“Para pasar de un diagrama M al diagrama C correspondiente, hay que agregar lazos propios de
transferencia (-1) en todos los nodos esenciales”
B) Dado el nodo esencial en el diagrama C hallar el diagrama M equivalente:
Diagrama C equivalente Diagrama C reducido
021 =+ bxax ≡ 13 xb
ac x −=
23 cx x =
Como vemos en el diagrama C no existe la diferencia de retorno dado por el lazo propio como
en el diagrama M.
Al igual que en el caso A), debemos hallar el equivalente M.
Para ello debemos buscar un diagrama M que reducido me dé igual al C reducido.
13 )1(1 cx
b
a x
+−=
⇒ 13 x
b
ac x −=
De las diferencias expuestas se deduce la regla de pasaje del diagrama C al M:
“Para pasar de un diagrama C al diagrama M correspondiente se deben agregar lazos de
transferencia (+1), en todos los nodos esenciales”
El diagrama C es generalmente mas fácil de hallar a partir del circuito que el diagrama M; perogeneralmente es más difícil de resolver.
x3 x1
b
ac−
Diagrama M reducido
x1
1
c
1+b
a
x3x2x1
≡cb
a
x3 x2
Diagrama M equivalente
≡
c b
a
x3x2x1
x3 x1
b
ac−
≡

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 280/424
282
Por ello un método conveniente en muchos casos puede ser el siguiente:
a) Escribir el diagrama C por inspección del circuito.
b) Transformar en un diagrama M.
c) resolverlo mediante reducción o fórmula de Shanon Mason.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 281/424
283
Fórmula de Coates-Desoer
Esta fórmula nos permite hallar el valor de la relación x1/x0 entre una variable x1 y otra de
referencia x0, o el valor de la incógnita x1, si se hace x0 de valor uno.
Antes de ello dibujaremos el diagrama C de un sistema de dos ecuaciones:
01212111 =−+ e I Z I Z 02222121 =−+ e I Z I Z
La expresión de la formula de Coates- Desoer es:
( )[ ]
( )∑
∑
−−
−−
=
ρ
ρ
σ
σ
0)1(
10)1(
0
1
1G
GG
x L
L
Veremos el significado de los símbolos:
Denominador: G0 gráfico reducido (es el gráfico que no contiene el punto o)
En nuestro ejemplo es:
: ρ Numero de subconjuntos que se pueden formar en el grafico, en cada uno de los
casos de los cuales están todos los nodos y se forman lazos que no se tocan.
I1
Z11
Z12
Z21
I2Z22
-e2
-e1
Z22
Figura 19
Z11
I1
z12
I2
Z21
O
≡

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 282/424
284
: ρ L Numero de lazos de cada subconjunto.
Por estar (-1) elevado a este valor el signo será positivo para numero de lazos par
y negativo para numero impar.
Por lo tanto, el denominador es la sumatoria de los productos de las transferencias de los lazos de
los subconjuntos del grafico reducido.
Numerador:
G: Significa el grafico total (o sea el que incluye a o).
En el numerador aparece la suma de los productos de las trayectorias que van del
nodo 0 al nodo considerado 1, multiplicada por los productos de las transferencias
de todos los lazos disjuntos a esa trayectoria.
En nuestro ejemplo el denominador vale:
[ ] [ ] 2112221121121
22112 )1()1( Z Z Z Z D Z Z Z Z D −=⇒−+−=
Hallaremos ahora el numerador.
En él aparece la trayectoria a la incógnita que nos interesa, lo que no ocurriría en el
denominador, que es igual para todas las incógnitas.
Suponiendo que queremos calcular I2 o sea esa corriente o ese nodo es nuestra incógnita,
determinaremos a continuación las posibles trayectorias con sus correspondientes lazos con sus
correspondientes lazos disjuntos.
La trayectoria de la derecha no tiene ningún lazo disjunto.
0I1
I2
-e2 Z11
I1
-e1
Z21
I2
0
I1 I2
Z22
I1Z12
Z12
I2 Z11

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 283/424
285
El numerador será:
[ ] [ ] 2111122110
1121 )1()1( Z e Z e N Z e Z e N −=⇒−−+−−=
Luego I2 se obtiene de inmediato pro el cociente de estos dos valores:
21122211
2111122
Z Z Z Z
Z e Z e I −−=
Justificación: del sistema de ecuaciones original la escribimos en forma matricial.
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⋅⎥
⎦
⎤⎢⎣
⎡
2
1
2
1
2221
1211
e
e
I
I
Z Z
Z Z
D
N
Z Z Z Z
Z e Z e
Z Z
Z Z
e Z
e Z
I =−−
=
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤
⎢⎣
⎡
=∴21122211
211112
2221
1211
221
111
2
Como vemos el denominador no es más que el desarrollo del determinante del sistema.
Veremos otro ejemplo. Para ello tomamos el diagrama de la figura 18 y escribimos su diagrama
reducido.
I3
I1
Z31
Z11 Z22
Z21
Z12
Z13
Z 23
Z32
I2
Figura 18
Z33

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 284/424
286
En base a este diagrama reducido debemos formar todos los subconjuntos posibles en el cual en
cada uno de ellos están todos los nodos y se forman lazos que no se tocan.
Ya podemos calcular el denominador que vale:
[ ] [ ]3113222
3322113 )1()1( Z Z Z Z Z Z D −+−= [ ] [ ]211233
2322311
2 )1()1( Z Z Z Z Z Z −+−+
[ ] [ ]23313121
3221131 )1()1( Z Z Z Z Z Z −+−+
[ ] [ ]311322332211 Z Z Z Z Z Z D +−= [ ] [ ]211233322311 Z Z Z Z Z Z ++ [ ] [ ]2331312322113 Z Z Z Z Z Z −−
Hallaremos ahora el numerador.
Supondremos por simplicidad que las dos únicas excitaciones son e1y e2.
Z 23 Z31
I2
I3
I1
Z21
I3
I2
I1
I2
Z32
Z13
I2
Z33
I3
I1
Z13 I3
Z32
I2
I1
Z31
I3
I1
I3
Z22
I2
Z11
I1
Z33
Z22 Z11
Z 23
Z21
Z12Z12

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 285/424
287
Las trayectorias son:
La trayectoria del cuadrante superior derecho no tiene ningún lazo disjunto.
El numerador será:
[ ] [ ]312310
332111 )1()1( Z Z e Z Z e N −−+−−= [ ] [ ]31132
133112
2 )1()1( Z Z e Z Z e −−+−−+
31132331123123133211 Z Z e Z Z e Z Z e Z Z e N +−−=
Luego I2 será el cociente entre estos dos valores:
231231132231321321331221322311332211
311323311231231332112
Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z
Z Z e Z Z e Z Z e Z Z e I
−+−++−
+−−=
)(
)(
132231231231321321331221322311332211
311323311233211312312
Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z
Z Z e Z Z e Z Z e Z Z e I
−++−−−
−+−−=
)()()(
)()(
132223123132133312213223332211
3113331123321312312
Z Z Z Z Z Z Z Z Z Z Z Z Z Z Z
Z Z Z Z e Z Z Z Z e I
−+−−−
−+−=
Que representa la solución matricial del sistema de ecuaciones.
I
0-
Z31 Z 23
I2
Z33
I3
I1
I3
I2
I1
I3
Z33
Z21
-
Z11
I1 -0 -0
Z31
I3
I1
Z13
0
I2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 286/424
288
Determinación del grafo C directamente del circuito
El método se basa en las ecuaciones de malla o de nodo del circuito, previa transformación de las
fuentes de tensión o de intensidad respectivamente:
Ejemplo:
Tomamos un nodo de referencia 0, externo al circuito y además tomamos dentro de cada malla
un nodo que representara en el grafico la ecuación correspondiente a dicha malla.
Luego trazamos una línea partiendo de 0, que corte a la fuente y llegue al nodo correspondiente a
esa malla.
El valor de la transferencia de esa línea será el de la fuente, con signo cambiado.
Además se trazan entre cada par de nodos las transferencias que representan las impedancias
mutuas entre las respectivas mallas.
El diagrama se completa con los lazos propios de cada nodo, que representan las impedancias
propias de las mallas.
De esta manera obtenemos el diagrama sin necesidad de escribir las ecuaciones.
-e1
Z31
e1
Z32Z 23
Z12
Z21
Z13
Z22
Z33
I3
I2Z11
I1
Z1 Z3
Z4
Z5
0
Z2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 287/424
289
Aplicaciones
Veremos, para ilustrar el caso en que hay dependencias activas entre mallas, el diagrama C para
un amplificador a transistor es:
≡
Las ecuaciones de malla del sistema son.
0121 =−− V h R I h I r Li
Resultando el siguiente diagrama C
-V1
I1 hi
-R Lh
hf /h0
I2(R L+1/h0)
0
--
+V1
v2R
hi
hrV2
+
-
1/h0
10
I h
f h
I2
-
-
+
V1 I1 v2
Circuito equivalente
-
+
R L
0)1
(0
20
1 =++h
R I h
h I L
f

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 288/424
290
Aplicación: Veamos el ejemplo de un circuito con fuente controlada , como es el caso de unAmplificador con realimentación negativa.
En este caso hay dependencia tanto activa como pasiva entre mallas.El diagrama se traza en primer término como si el circuito fuera pasivo.
Luego se toma en cuenta la influencia de las fuentes controladas.
Diagrama para circuito pasivo:
El generador dependiente afecta a las mallas 2 y 3, es decir, a las corrientes i2 e i3.
Pero como:
)( 212 ii Z e g −=
el generador controlado depende de i1 e i2, por ello, deben aparecer nuevas trayectorias que
partan de i1 e i2.
Las transferencias de esas nuevas ramas se pueden hallar como sigue:
Ejemplo: Línea que sale de i1 y entra a i2.
La ecuación de a malla 2 para el circuito pasivo era:
0)( 312322 =−−++ ir i Z r Z Z i p p
0V2
Z2+Z3+rp
i3i2-V1 i1
-Z2
-Z2-r p
r p+Z4
-r p
Z1+Z2
Z4
g e.
Z6 i1
Z1 Z3
Z2 i2 i3
R p
+
+
-
-
V1
Fig. 8
V2
eg = (i1 – i2) Z2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 289/424
291
Que se ve refleja en el grafico anterior.
La ecuación de la misma malla considerando el generador controlado es:
g p p E ir i Z r Z Z i =−−++ 312322 )(
o sea : 2212312322 )( i Z i Z ir i Z r Z Z i p p μ μ −=−−++
0)( 3121222322 =−−−+++ ir i Z i z i z r Z Z i p p
Los términos adicionales subrayados representan las dos nuevas líneas entrantes al nodo i2, una
proveniente del nodo i1 y otra del nodo i2 mismo, es decir, un lazo propio.
Análogamente se hallan nuevas trayectorias a partir de la ecuación de la malla 3.
g p p E r i Z r i −=−+ 243 )(
O sea: 2212243 )( i Z i Z r i Z r i p p μ μ +−=−+
0)( 2221243 =−−++ p p r ii Z i Z Z r i
El diagrama definitivo es:
Se han subrayado las transferencias de las nuevas líneas.
0V2
i3
i2
-V1 i1
-μZ2
-Z2 -r pr p+Z4
-μZ2
Z1+Z2
Z4
μZ2
μZ2
-r p-Z2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 290/424
292
Aplicación: caso en que se utilizan ecuaciones de nodos.
Veremos nuevamente la aplicación al amplificador con realimentación negativa del caso
anterior.
Como trabajaremos con las ecuaciones de nodo redibujemos nuevamente el circuito con los
valores de admitancia y fuente de intensidad.
El diagrama de flujo se traza de la misma manera que en el ejemplo anterior obteniéndose:
0
Y2+Y3+gp
V3V2-I0 V1
-Y2
-Y2-g p
g p+Y4
-g p
Y1+Y2
Y2 V3
g p
I0
)21( vvm g −
V2
Y4Y3Y1
V1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 291/424
293
Luego incorporando el efecto del generador controlado nos aparecen las transferencias
subrayadas:
)()()( 21212323 V V g Y V V Y g V g V m p p −=−+++−
21213223 )( V g V g Y V g Y Y V g V mm p p −=−+++−
0)( 21213223 =+−−+++− V g V g Y V g Y Y V g V mm p p
0
Y2+Y3+g p
V3
V2
V1
-gm
-Y2-g p
g p+Y4
gm
Y1+Y2
g
-gm
-g p-Y2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 292/424
294
REPRESENTACIONES
DE LA FUNCIÓN
TRANSFERENCIA,
EN BASE
A LA CONFIGURACION
DE POLOS Y CEROS
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 293/424
295
INDICE Pág.
Introducción……………….. ................................................................................................................... 296
Propiedades de la transferencia…………………………... ..................................................................... 296
Obtención de la respuesta frecuencial a partir de la configuración de polos y ceros. ….......................... 300
Influencia de la ubicación de los polos y ceros, sobre las curvasde respuestas en frecuencia de amplitud y fase…………………………….…………….………………304
Cero sobre el eje jω………………………………….............................................................................. 305
Cero próximo al eje jω con componente real y negativo........................................................................306
Polo sobre el eje jw…………………………..............................................................................................307
Polo próximo al eje jw con componente real negativa……………………….........................................309
Cero en el origen……………………………………..............................................................................310
Polo en el origen..……............................................................................................................................312
No existen polos ni ceros……….............................................................................................................312
Polos real negativo……..………………….…………...........................................................................312
Cero en el origen y polo real negativo....................................................................................................313
Cero en el origen y par de polos complejos conjugados....................................................................... 314
Par de polos complejos conjugados:..................................................................................................... 315
Funciones de amplitud constante………............................................................................................... 317
Funciones de fase mínima………………………………:…..................................................................318

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 294/424
296
PROPIEDADES Y REPRESENTACION DE LAS TRANSFERENCIAS, EN BASE A LA
CONFIGURACION DE POLOS Y CEROS
Introducción:
En clases anteriores se vio que un modelo circuital idealizado puede ser totalmente
caracterizado, trabajando en el domino de frecuencia compleja, mediante las funciones de
Transferencia, para dipolos y cuadripolos.
En este capitulo se tratará de mostrar que toda la información sobre las funciones transferencia
T (p) o respuesta R (p), está contenida en los valores de los polos, los ceros y la constante de
escala A0 de las mismas.Esta información será presentada gráficamente, en las llamadas configuraciones o constelaciones
de polos y ceros.
Se mostrará luego la forma de obtener la respuesta en frecuencia de la amplitud y la fase, a partir
de la configuración de polos y ceros, así como la correlación entre algunas constelaciones típicas
y sus respuestas frecuenciales asociadas.
A continuación se desarrollará la forma de determinar la función Transferencia conociendo su
módulo, fase y su parte real.Finalmente se introducirán los gráficos de Bode, para obtener las respuestas asintóticas de
frecuencia.
Propiedades de la Transferencia
Habíamos visto que toda función Transferencia puede escribirse como cociente de dos
polinomios en “p”:
( )01
11
011
1
...
...
b pb pb pb
a pa pa pa pT
nn
nn
mm
mm
+×++×+×
+×++×+×=
−−
−−
[1]
que puede escribirse, sacando factor común am en el numerador y bm en el denominador, para que
los términos de mayor grado tengan coeficiente unitario:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 295/424
297
( )
mm
n
m
nn
mm
m
m
mm
m
m
b
b p
b
b p
b
b p
a
a p
a
a p
a
a p
b
a pT
0111
0111
...
...
+×++×+
+×++×+
×=−−
−−
[2]
ó también, llamandom
m
ba A =0 y expresando los polinomios como producto de factores:
))...()...(()(
))...()...(()()(
21
210
ni
mk
p p p p p p P p
z p z p z p z p A pT
−−−×−
−−−×−×= [3]
Donde z k son los ceros de la función, pi los polos y A0 un factor de escala.
Para que A0 tenga el valor correcto, antes de hallar los polos y los ceros (raíces de los polinomios
del denominador y numerador respectivamente), debe operarse algebraicamente de modo que noexistan términos con exponentes negativos para p y que los coeficientes de los términos de
mayor grado sean unitarios.
Puede verse en esta última expresión (Ec. [3]) que salvo el factor de escala A0, que afecta la
amplitud pero no la forma de T (p), toda la información sobre ésta, se halla contenido en los
valores de los polos y los ceros de la función.
Esto sugiere la conveniencia de representar dichos polos y ceros en el plano complejo, para
facilitar el análisis de la influencia que tienen sobre T(p) o sobre la respuesta, puesto que yavimos anteriormente que R(p) podía estar representado también por una expresión como la [1].
Este análisis es valido no sólo para la función transferencia T(p) o la función respuesta R(p), sino
también por las llamadas impedancias o admitancias de excitación de un dipolo o cuadripolo,
definidas a continuación:
salida
entrada
I
V p Z =)(
salida
entrada
V
I pY =)(
Existen ciertas restricciones respecto de las ubicaciones de los polos y ceros de estas funciones,
que serán estudiadas en primer término para las impedancias y admitancias de excitación.
a) _ Las funciones Z (p) e Y (p) son de la forma dada por la Ec [1], con todos sus coeficientes
reales y positivos, por ser combinaciones de los parámetros circuitales.
Por tanto en estas funciones, tanto los polos y los ceros deben estar en el semiplano izquierdo
(incluyendo el eje jω como caso ideal, pues siempre hay presente alguna resistencia).
Además los polos y ceros, ó son todos reales ó aparecen de a pares conjugados.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 296/424
298
b) _Para las impedancias ó admitancias, la diferencia de grado entre numerador y denominador
puede ser: 1, 0, ó -1.
Los polos y ceros en el infinito, implícitos en estas funciones, sólo pueden ser simples.
Esto se deduce del comportamiento de los dipolos pasivos para frecuencias muy altas y muy bajas.
En efecto cuando la frecuencia tiende a infinito en la Ec. [1], resulta:
nm
n
m
pnn
mm
p p p
b
a
pb
pa pT −
∞→∞→∞→=
×
×= limlim)(lim [4]
Si m - n = +1, la Ec. [4] queda:
pb
a pT
n
m
p p ∞→∞→= lim)(lim
que corresponde a una impedancia en la que la componente inductiva es preponderante
e p L p Z .)( = .
Ó una admitancia en la que la componente capacitiva es la más importante e p C pY .)( =
Si m - n = -1, la Ec. [4] queda:
p
a
b pT
m
n p p ×=
∞→∞→
1lim)(lim
Que corresponde a una impedancia en la que es preponderante la componente capacitiva
e
p pC
Z 1
)( = .
Ó una admitancia en la que la componente inductiva es la más importante
e
p pL
Y 1
)( = .
Finalmente si m - n = 0, la ecuación [4] queda:
n
m
p p b
a pT
∞→∞→= lim)(lim
Que corresponde a una impedancia resistiva en la que las componentes reactivas no existen o han
sido cortocircuitadas por capacitores conectados en serie.
En resumen, los grados del numerador m y del denominador n, deben ser iguales o diferir en una
unidad.
Esto implica que exista un cero simple en el infinito (m – n = 1).Ó un polo en el infinito (m - n = -1).

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 297/424
299
Ó que no existan polos o ceros implícitos en el infinito (m - n = 0).
Análogamente, cuando la frecuencia tiende a 0, la Ec. [1] se reduce a:
01
0100
lim)(limb pba pa pT
p p ++≅
→→ [5]
En la Ec. [5] pueden darse las siguientes alternativas.
Si a 0 = 0 ⇒ pb
a pT
p p 0
1
00lim)(lim→→
≅
Que corresponde a e p L p Z .)( = ó e p C pY .)( =
Si b0 = 0
pa
b pT
p p ×≅
→→
0
100
1lim)(lim
Que corresponde a:e
p pC
Z 1
)( = óe
p pL
Y 1
)( =
Si 00 ≠a y 0≠b ∴ 0
0
00lim)(lim
b
a pT
p p →→≅
Que corresponde a Z(p) = Re ó Y(p) = Ge
Para el caso de la función transferencia, las restricciones son las siguientes:
a) _ Las funciones de transferencia son de la forma dada por la Ec.[1], con todos los coeficientes positivos.
En consecuencia son funciones reales, los polos y ceros son reales o aparecen de a paresconjugados.
b) _ Para que la respuesta esté acotada, los polos deben tener la componente real negativa o
como caso limite nula.
Esto es, deben encontrarse en el semiplano izquierdo o en el eje jω.
Los ceros pueden encontrarse en todo el plano complejo, incluyendo el semiplano derecho,
sin implicar inestabilidad.
Cuando T(p) tiene todos los ceros en el semiplano izquierdo, se denomina función de fase
mínima, por las razones que se verán mas adelante.
c) _ Para que la respuesta tenga sus ordenadas acotadas, en caso de existir polos sobre el eje jω,
estos deben ser simples.
No hay restricciones respecto de la multiplicidad de los ceros.
d) _ Para las funciones transferencia definidas como relaciones de tensiones o de corrientes, el

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 298/424
300
grado del polinomio del numerador debe ser menos o igual al denominador.
Obtención de la respuesta frecuencial de circuitos excitados por una señal senoidal,
a partir de la configuración de polos y ceros.
Para este análisis se utilizará la configuración de polos y ceros de T(p), para estudiar las
modificaciones que experimenta la respuesta de un circuito, excitado por una señal senoidal en
régimen permanente, cuando varia la frecuencia de la excitación, manteniendo constante su
amplitud y fase.Considérese una función operacional T(p) constituida por un cociente de polinomios como el
mostrado en la Ec. [3].
Esto es:
))...()...(()(
))...()...(()()(
21
210
ni
mk
p p p p p p P P
z p z p z p z p A pT
−−−×−
−−−×−×=
En régimen senoidal permanente (p = jω), la Ec. [3] se convierte en:
))...()...(()(
))...()...(()(
)( 21
210
ni
mk
p j p j p j P j
z j z j z j z j
A pT −−−×−
−−−×−×= ω ω ω ω [5]
Los fasores complejos eficaces de la excitación y la respuesta, están vinculados a través de la
expresión:
)()()( j E jT j R x×= [6]
Por tratarse de una igualdad de funciones de variable complejas, la Ec. [6] puede ser desdoblada
en dos igualdades reales, una para el módulo y otra para la fase.
Esto es:
)()()( x E T R ×= [7]y )(arg)(arg)(arg j E jT R x+= [8]
Las ecuaciones [7] y [8] muestran que si varía la frecuencia de la excitación Ex(t) , manteniendo
su amplitud Ex(ω) ([7]) y su fase arg.Ex(jω) ([8]) constantes, las formas de las curvas de respuesta
de amplitud R(ω) y de fase arg.R(jω), serán respectivamente las de T(ω) y arg. T(jω).
En consecuencia, bastará con estudiar las variaciones del módulo y el argumento de la Ec. [5]
con la frecuencia.
La fig. 1 - a) muestra que los factores de la forma (jω -zk ), son los fasores dirigidos desde el cerogenérico zk, al punto del eje j ω, correspondiente a la pulsación ω considerada.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 299/424
301
Análogamente en la figura 1 b) se observa que los factores de la forma (j ω-pi) son los fasores
dirigidos desde el polo genérico pi, al punto del eje jω considerado.
En consecuencia la Ec. [5] puede ser expresado:
[9]
Finalmente desdoblando la ecuación [9], se obtienen las expresiones [10] y [11] para
la determinación de las respuestas en frecuencia de amplitud y fase respectivamente,
a partir de la configuración de polos y ceros.
[10]
−= ⎭⎬
⎫
⎩⎨⎧
== ∑m
k oconsiderad jωejedel pto.el hastacero,cada
desdedirigidos fasoreslosdeumentoslosde j ArgT
1
,arg)()( ω ω θ
(jω -pi)(jω -zk )
zk
jω
jω
jω
jω
pi
R R
a) b)
x
Fig.1
∏
∏
= ⎭⎬⎫
⎩⎨⎧
= ⎭⎬⎫
⎩⎨⎧
×=n
ioconsiderad jejedel puntoel hasta polo
cadadesdedirigidos fasoreslosde
m
k oconsiderad jejedel puntoel hastacero
cadadesdedirigidos fasoreslosde
AT
1,
1,
0)(
ω
ω
ω
∏
∏
= ⎭⎬⎫
⎩⎨⎧
= ⎭⎬⎫
⎩⎨⎧
×=n
ioconsiderad jejedel puntoel hasta polocada
desdedirigidos fasoreslosdemóduloslosde
m
k oconsiderad jejedel puntoel hastacerocada
desdedirigidos fasoreslosdemóduloslosde
AT
1,
,
1,
,
0)(
ω
ω
ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 300/424
302
∑= ⎭
⎬⎫
⎩⎨⎧
−n
ioconsiderad jωejedel pto.el hasta polo,cada
desdedirigidos fasores,losdeumentoslosde
1
arg [11]
Si no existen ceros, el numerador de la Ec. [9] vale uno.
Los polos y los ceros en el infinito no se computan pues ya están implícitos en las ecuaciones.
El sentido positivo para el cómputo de los ángulos es el mostrado en la Fig. 2.
Ejemplo 1: La figura 3-b) es la configuración de los polos y ceros de la transferencia de
Tensiones, del circuito de la figura 3-a) siendo A0=1.
Calcular los valores de las respuestas de amplitud y fase para ω = 0, 0.5, 1, 2, 5 e ∞.
Con los valores obtenidos, representar gráficamente las curvas de respuesta en frecuencia de
amplitud y fase.
Өk Fig. 2
jω
zk
R

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 301/424
303
Se utilizan las expresiones [10] y [11].
Para ω = 0 , la fig. 3-c) muestra los fasores intervinientes.
Resulta:
0)( 0 == B
A A pT , ya que 0= A por existir un cero en ω = 0.
º90º0º90)0( =−=−= B A θ θ θ
Nótese que para ω = 0, es º90= Aθ .
En efecto, la fig. 3-d) muestra que para todo ω > 0, es2
π θ = A .
En consecuencia, en el límite, cuando ω→0, es º90= Aθ .
C
a)
RVs
R=1mΩ C= 2µf
Ve
x
jω
R p1
z1
ӨA
ω =0,5
ӨB
j0,5
jω
Ā= 0
ӨA=90º
ω=0
x
ӨB=0
c)
jω
ӨB
∞ ∞e) ω = ∞
ӨA
R R
R x
-0,5 -0,5
x
d)
b)
jω
B
B A
B A
-0,5
-0,5

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 302/424
304
Observemos ahora los fasores intervinientes para ω = 0,5.
Aplicando nuevamente las Ec. [10] y [11] se obtiene:
707.0
5.02
5.010)5,0( =
×
×==
B
A AT
º45º45º90)5,0( =−=−= B A θ θ θ
En forma similar se procede para ω = 2 y ω = 5, midiendo sobre la gráfica de polos y ceros, los
módulos y los ángulos de los fasores involucrados.
Finalmente para ω→0, la fig. 3-e) muestra que los módulos de A y B son infinitos y del mismo
orden, de modo que:
1)( 0 ===∞ A B
A AT o
º0º90º90)( =−=−=∞ B A θ θ θ
Representando gráficamente los valores de T(ω) y Ө (ω), se obtienen las respuestas en
frecuencias de amplitud y de fase de la figura 4-a) y b).
Influencia de la ubicación de los polos y ceros, sobre las curvas de respuestas en frecuencia
de amplitud y fase
En lo que sigue se analizará la forma en que afecta, a las curvas de respuesta de amplitud y fase,la proximidad de los polos y los ceros, en un entorno de su zona de influencia.
1
ω ω
T(ω ) Ө(ω )
Fig.41 2 3 4 1 2 3 4

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 303/424
305
Cero sobre el eje jω: La fig 5 muestra una configuración de polos y ceros, que incluye un cero
sobre el eje jω.
En la figura 5-a) se muestran los fasores que intervienen para la determinación de las respuestas
en frecuencias, de amplitud y de fase, para la pulsación genérica ωi < β, mientras que la fig 5-b)
muestra los mismos fasores para ωs > β.
Si se toma, un entorno lo suficientemente pequeño de ω alrededor de β, el único fasor que
experimenta modificaciones importantes es el Ā, ya que los restantes mantienen sus módulos y
argumentos sin alteraciones de consideración.
La Ec. [10] queda:
[12]
Por las razones precitadas, en un entorno alrededor de ω = β, las variaciones de T(ω) son
producidos por las modificaciones de A , el que llega a anularse cuando ω = β y crece
rápidamente para los valores menores o mayores de ω , dando lugar a la curva de la fig.6-a).
La Ec. [11] resulta
jω jω
θA
θA
resto de la config.de polos y ceros
jβ
jωi
Fig.5
R
B
A
C
resto de la config.de polos y ceros
jβ
jωs
R
C
A
D
D
B
∏= ⎭⎬
⎫
⎩⎨
⎧
⎭⎬⎫
⎩⎨⎧
×
×=n
i oconsiderad j puntoal poloslos
desdedirigidos fasoreslosdemóduloslosde
oconsiderad jω puntoal ceros,tesreslosdesde
dirigidos fasores,losdemóduloslosdeoducto A
AT
1 ,
,
tan
Pr
0)(
ω
ω
∑= ⎭
⎬⎫
⎩⎨⎧
−
−⎭⎬⎫
⎩⎨⎧+=
n
i
A
oconsiderad ejedel pto.al polocada
desdedirigidos fasores,losdeumentosde
oconsiderad jωejedel pto.al cerostesreslosdesdedirigidos fasores,losdeumentosdeuma
1
)(
.
arg
,tanargSθ θ ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 304/424
306
[13]
donde las variaciones de Ө(ω), dependen fundamentalmente de las modificaciones de ӨA.
Este ultimo ángulo vale -90º, para todo ω < β y + 90º, para todo ω > β.
En consecuencia, la curva del argumento Ө(ω) presenta una discontinuidad de primer orden, con
un salto de +180º, para ω= β como se ve en la figura 6-b).
Cero próximo al eje jω, con componente real negativa: La fig. 7 muestra una configuración de
polos y ceros que incluye un cero con parte real negativa próximo al eje jω.-
Comparando con la fig 5, se observa que existe una gran similitud.
C B
D
jω
θA
resto de la config.de polos y ceros
j β
jωi
Fig.7
R
A
T(ω)
ω
Ө(ω)
Ө(w s)
Ө(ωi)
∆Ө=180º
ωβ β
b)a)
Fig. 6

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 305/424
307
En efecto las variaciones del módulo y la fase de T( jω ) dependen fundamentalmente del fasor A ,
siendo válidas las expresiones [12] y [13].
Como el módulo de A se hace mínimo para ω = β, pero no llega a anularse, la curva de T(jω)
presenta un mínimo zonal para ω = β, como se puede ver en la figura 8-a).
En cuanto a la fase, sufre una variación muy rápida en las proximidades de ω = β pero sin llegar
a presentar una discontinuidad, como muestra la fig. 8-b).
Cuanto más próximo al eje jω se encuentra el cero, más abruptas son las variaciones de las
curvas.
En efecto la fig.9 muestra el efecto de α sobre Ө(ω).
En el límite, cuando el cero queda sobre el eje jω, las curvas presentan las discontinuidades de la
fig. 6-b).
Polo sobre el eje jω:
a) b)
Ө(ω )
Ө(ω s )
Ө(ωi )
T(ω )
ωω
ΔӨ=+180
β β
Fig. 8
b)Ө(ω)
Ө(ωs)
Ө(ωi)
ω
ΔӨ = +180
β
α=0
α creciente
Fig.9

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 306/424
308
La fig. 10 muestra una configuración de polos y ceros que incluye un polo sobre el eje jω
Para ω = β:
Razonando como en los casos anteriores, se encuentra que las variaciones de las respuestas de
amplitud y fase están gobernadas por el fasor N .
En efecto:
[14]
Cuando ω = β, es 0= N y por lo tanto T(ω) se hace infinitamente grande.
Para ω > β ó ω < β, N aumenta rápidamente, dando lugar a la curva de la figura 11-a
En cuanto a la fase, resulta:
Ө(ω )
ω
ΔӨ = +180
β
T(ω)
ω β
Ө(ωi )
Ө(ωs)
C B
D
jω
θn
Resto de laconfig. de polos yceros
jβ
jωi
R
N
c)
a)
Fig. 10
Fig. 11
b)
⎭⎬⎫
⎩⎨⎧
×
⎭⎬⎫
⎩⎨⎧
×=∏
=
oconsiderad jejedel puntoel hasta polocadadesde
dirigidos fasorestesreslosdemóduloslosdeoducto
m
k oconsiderad jejedel puntoel hastacerocada
desdedirigidos fasoreslosdemóduloslosde
N
AT
ω
ω ω
,
,tanPr 1
,
,
0)(
⎥⎦
⎤⎢⎣
⎡
⎭⎬⎫
⎩⎨⎧
+−
−⎭⎬⎫
⎩⎨⎧= ∑
=
oconsiderad jωejedel pto.al polo,cada
desdedirigidostes,res fasoreslosdeumentosdeSuma
oconsiderad jωejedel pto.al cero,cadadesdedirigidos fasores,losdeumentosde
N
m
k
tanarg
arg1
)(
θ
θ ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 307/424
309
[15]
Para ωi < β, es Ө N = 2
π
− y para todo ωi > β, resulta Ө N = 2
π
+ .
De modo que Ө(ω) presenta un salto de -180º, debido al signo negativo que afecta a Ө N.
Polo próximo al eje j ω con componente real negativa: Un análisis similar al efectuado para los
casos anteriores, muestra que para una configuración como la de la fig.12, se obtienen respuestas
de amplitud y fase en un entorno de ω = β, como las mostradas en la fig.13

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 308/424
310
Hemos visto que la presencia de polos y ceros próximos al eje j ω, producen variaciones bruscas
de las respuestas de amplitud y fase.
Si por el contrario, se tiene polos y ceros con componentes reales mayores que las imaginarias,
las curvas presentan variaciones más suaves.
Además los polos producen elevaciones de las curvas de respuesta de amplitud y descensos de
la fase, mientras que los ceros producen un efecto contrario.
Con estos métodos y elementos de análisis, se estudian las respuestas de algunos circuitos y
configuraciones típicas de polos y ceros.
Cero en el origen: El diagrama de polos y ceros está representado en la fig. 14-a), pudiendo
corresponder, por ejemplo, a la impedancia de excitación de un inductor Z(p) = pL.
Para ω0 = 0, resulta T(0) = 0 , pues existe un cero en el origen.
a) T(ω)
ω
β
b) Ө(ω)
ω
β
Fig. 13
ΔӨ = -180
jω
θn
resto de la config.de polos y ceros
jβ
jωi
R
C B
A
N
Fig. 12

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 309/424
311
Para todo valor de ω > 0, crece linealmente y con él lo hace A AT ×= 0)(ω , dando lugar a
la curva de la fig. 14-b).
En cuanto al argumento, en la fig. 14-a) se ve que vale2
π + para todo ω > 0, dando lugar a la
respuesta de la fig. 14-c).
ω
jω
j ω A
Ө ω
R0
2
π +
T(ω)
Ө(ω)
a)
Fig. 14
c)
b)
ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 310/424
312
Polo en el origen: Esta configuración puede corresponder, por ejemplo, a la impedancia de un
capacitor pc
p Z 1
)( = y se la muestra en la figura 15-a).
Puesto que:
A AT
1)( 0 ×=ω
Al crecer ω y por lo tanto A linealmente, T(ω) decrece hiperbólicamente, según se ve en la fig.15-b), donde el polo en el origen hace que la respuesta sea infinita para ω = 0.
En cuanto a la fase, resulta:
cte A =−=−=2
º0)( π θ ω θ
Como muestra la figura 15-c)
No existen polos ni ceros: Ésta transferencia corresponde al circuito resistivo puro, siendo:
cte AT == 0)(ω
000)( ºº =−=ω θ
Polo real negativo: Esta configuración puede corresponder al circuito de la fig. 16-b), para el
cual, la transferencia de tensiones vale:
L R P
R
L R pL
R AT pv p
+=
+==
1)()(
En la fig. 16-b) se aprecia la configuración y el fasor A correspondiente a una pulsación ω
genérica.
0
2
π −
jω
j ω
Ө ω
R
Fig.15
T(ω)
Ө(ω)
ω
ω
a) b)
c)

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 311/424
313
Como A toma su mínimo valor para ω = 0 y crece monótonamente con ω, resulta que:
A AT
1)( 0 ×=ω
Parte del valormin
0 A
A
tiende a cero al aumentar ω1, como muestra la fig.16-c).
En cuanto a la fase ӨA aumenta de 0 a2
π , cuando ω tiende a cero o infinito, hasta que:
Aθ ω θ −= º0)(
Resulta el gráfico de la fig.16-d).
Nótese que esta configuración corresponde a un filtro pasa bajos.
Cero en el origen y polo real negativo: Este caso ya se desarrollo en el ejemplo en el ejemplo 1 y
se muestra en las figuras 3 y 4 corresponde a un filtro pasa altos.
R
j ω
ω
LR Vss(p)
Vee(p)
0
2
π −
T(ω)
Ө(ω)
ω
c)
d
min
0 A
A
a)
Ā
ӨA
b) Figura 16
jω
X

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 312/424
314
Cero en el origen y par de polos complejos conjugados: Esta configuración puede corresponder,
por ejemplo a la transferencia de tensiones del circuito de la fig. 17-a).
En efecto:
LC p L
R P
p
L
R
R pC pL
R pT
11)(
2 +×+
×=
++
=
Vemos que si LC L
R 1)
2( 2 < , en el denominador aparecen dos polos complejos conjugados,
resultando la configuración de la Fig. 17-b).
T(ω) se anula para ω = 0, pues existe un cero en el origen y también para ∞→ , pues hay un
cero implícito en el infinito (existen dos polos y un cero).
Además presenta un máximo para β ≅ , pues existe un polo próximo al eje jω.
La curva de T(ω ) se muestra en la fig.17-c) y corresponde a un filtro pasa banda.
Fig. 17
B
A
ӨA=φ
ӨB=-φ
-jβ
R
L
Vss(p) Vee(p)
c)T(ω)
ω β
d) Ө(ω)
ω
β
jω
jβ
R
a)
b)
2
π −
2
π
+
θc
X
X

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 313/424
315
En cuanto a la respuesta de fase, para ω = 0 es:
º90)(º90)()0( =+−−=+−= ϕ θ θ θ θ B Ac
y para ∞→ω :
º90)º90º90(º90)()( −=++−=+−=∞ B Ac θ θ θ θ
Para β ω ≅ , )(wθ se anula, dando lugar a la curva de la fig.17-d).
Par de polos complejos conjugados: Esta configuración, mostrada en la fig.18-b) puede
corresponder por ejemplo a la transmitancia de tensiones del circuito de la fig.18-a).
En efecto:
LC L
R
p P
LC
R pC pL
pC pv pT
111
1
1
)()(2
+×+
×=
++
=Δ=
Que para LC L
R 1
2
2
<⎟ ⎠
⎞⎜⎝
⎛ , da dos polos complejos conjugados.
Para ω = 0, la curva de T(ω ) parte del valor de:
22
0
222200
11
)0( β α β α β α +=⎟ ⎠ ⎞⎜
⎝ ⎛ +×⎟
⎠ ⎞⎜
⎝ ⎛ +×=××=
A
A B A AT
Para ω próximo a β, pasa por un máximo debido al polo próximo al eje jω.
Finalmente, para ∞→ω , la curva tiende a cero pues existe un cero implícito de do2 orden en
el punto impropio.
La fig.18-c) muestra la forma de T(ω ) la fase vale, para ω = 0:
( ) ( ) 0)0( =+−−=+−= θ θ θ B A
Para ∞→ es:
( ) π π π
θ θ θ −=⎟ ⎠
⎞⎜⎝
⎛ +−=+−=∞22
)( B A

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 314/424
316
En la figura 18-d) se muestra la curva Ө(ω).
T(ω)
d)
-π
B
A
ӨA=φ
ӨB = -φ
-jβ
C
L
Vss(p) Vee(p)
c)
ω
Ө(ω)
ω
jω
jβ
R
a)
b)
Fig. 18
ω= β
R
x
x

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 315/424
317
Funciones de amplitud constante: Son las funciones en las cuales los ceros son la imagen
especular de los polos, respecto del eje jω, como la configuración mostrada en la fig. 19-a).
Estas configuraciones deben corresponder a funciones transferencia para que sus ceros puedan
estar en el semiplano derecho.
En la figura 19 puede verse que los fasores dirigidos desde los ceros al punto jω considerado,tienen módulos que se corresponden con los fasores dirigidos desde los polos al punto j ω
considerado.
En consecuencia, la aplicación de la ecuación [10] dará el valor:
0)( AT =
para todo ω, como se muestra en la fig. 19-b).
De ahí su denominación de función amplitud constante o pasa todo.
Cabe destacar que la respuesta de fase presenta variaciones importantes a pesar de ser constantela amplitud.
Esta propiedad permite usar configuraciones de amplitud constante, para efectuar correcciones
de fase, sin alterar la respuesta de amplitud.
1α − 1α 2α − 2
-jβ
ω
A0
T(ω)
-jβ
Fi .19
X
X
XR
ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 316/424
318
Funciones de fase mínima:
Según se ha visto, las funciones de transferencia pueden o no tener ceros en el semiplano
derecho.
Si se observan las configuraciones de la fig. 20, se aprecia que para un cierto valor de ω, lasrespuestas de ambas son iguales:
a) b)
En efecto aplicando las Ec. [10] y [11] a la transferencia de la fig.20-a) nos queda:
E DC
B A AT
××
××= 01 )(ω y ( ) E DC B A θ θ θ θ θ θ ++−+=)(
º0)0( =θ y ( ) 2º90º90º90º90º90º90)(
π
θ −=−=++−+=∞
Luego para ω variando entre 0 y ∞ , )(θ varía de 0º a2
π −
Para la fig.20-b) en que se han trasladado los ceros al semiplano derecho tendremos:
E DC
B A AT
××
××= 02 )(ω y ( ) E DC B A θ θ θ θ θ ω θ ++−−−=)(
º0)0( =θ y ( ) 25º450º90º90º90º90º90)( π θ −=−=++−−−=∞
R
-ӨB
R α1
B -α3-α2 -α1
B
C
E
D
A
ӨC
ӨE
ӨA
ӨB
ӨD
-jβ2
- 1
jβ1
jβ2
j ω
jω
-α2
C
E
D
ӨC
ӨE
-ӨA
ӨD
jβ2
jβ1
jβ1
jβ2
jω
Fig 20
-α3

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 317/424
319
Como vemos para un cierto valor de ω, las respuestas de módulos son iguales ya que A A ′= y
B B ′= con lo que )()( 21 ω T T = .
Sin embargo no ocurre lo mismo con las respuestas de fase.
Así pues, una respuesta de amplitud, puede tener varias respuestas de fases asociados.Se denomina función de fase mínima, a la que tiene todos los ceros en el semiplano izquierdo o
sobre el eje j ω, como la configuración de la fig.20-a).
Las funciones que poseen por lo menos un cero en el semiplano derecho se denominan funciones
de fase “no mínima”.
Como vemos las funciones Transferencia de fase mínima se caracterizan por tener, para igual
comportamiento del módulo con la frecuencia, menos rotación de fase cuando ω varía de cero a
infinito. Las funciones de fase mínima son muy importantes, pues en ellas existe una relación univoca
entre las respuestas de amplitud y de fase, permitiendo la determinación de la segunda cuando se
conoce la primera.
Las funciones de fase no mínima pueden ser consideradas como el producto de una función de
fase mínima y un pasa todo de amplitud unitaria.
Esto se muestra en a fig.21 y aclara la posibilidad de efectuar correcciones de fase, sin modificar
la respuesta de amplitud, empleando funciones pasa todo.
Función de fase mínima
Función pasa todo unitaria
Función de fase nomínima
jω
R
jω
R
jω
R
Polos y ceroscancelados

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 318/424
320
Es interesante destacar que la configuración de polos y ceros correspondiente a la función de fase
no mínima, tiene una fase algebraicamente menor que la de fase mínima, (vemos el caso de la
fig. 20 que22
5 π π
−<− ).
La inconsistencia de la denominación se debe a que fue introducida por Bode para una funciónde transferencia definida inversamente a lo que se acostumbra actualmente.
Esto es:
Actuale
s
V
V pT =)( y Bode definió
s
e
V
V pT =)(
Sin embargo, esto no tiene importancia alguna, pues lo fundamental no reside en que la fase sea
mínima o no, sino en la posibilidad de determinar la respuesta de fase en función de la amplitud,
en forma univoca, para las funciones sin ceros en le semiplano derecho.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 319/424
321
GRAFICOS
DE
BODE
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 320/424
322
INDICE Pág.
Introducción al trazado logarítmico...……………….. ............................................................................ 323
Expresiones generales de la función transferencia espectral.................................................................... 324
Trazado de los diagramas logarítmicos de modulo y fase…………………………….............................326
Construcción de los gráficos asintóticos……………………………………………………..…………. 342

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 321/424
323
GRAFICOS DE BODE
Introducción a los trazados logarítmicos
Los trazados logarítmicos de la magnitud y ángulo de la función transferencia sistematizan y
simplifican el proyecto de sistemas realimentados de control.
La ventaja de los trazados logarítmicos es la de que las operaciones de multiplicación y división
se convierten en otras de suma o resta y que el trabajo para obtener la función transferencia es
más bien gráfico que analítico.
Los factores básicos de la función transferencia pertenecen a una de tres categorías que pueden
trazarse aproximadamente por medio de asíntotas.
El empleo del papel semi-logarítmico elimina la necesidad de tomar logaritmos de muchos
números y también extienden el margen de las bajas frecuencias, de primordial importancia.
Planteo general: El logaritmo neperiano, de un número complejo es, a su vez, otro númerocomplejo.
Sea:
R j j eT T
θ ω ω )()( = , donde =)(ω T módulo del complejo
R j j j eT T θ ω ω lnlnln )()( += = )()(ln ω ω θ R j jT + [1]
Vemos que el logaritmo de una variable compleja )( ω jT tiene una parte real igual al logaritmo
neperiano del módulo del complejo y una parte imaginaria igual al ángulo )(ω θ R , expresado en
radianes.
Ambas componentes son función de la frecuencia ω.
De igual forma, el logaritmo decimal de base diez de un número complejo es también otro
número complejo.
Así:
R j j j eT T θ ω ω logloglog )()( += = )()( .)434,0(log ω ω θ R j jT + [2]
Como podía preverse, la parte real es igual al logaritmo decimal del módulo del complejo
( ))(log ω T y la parte imaginaria es )(.)434,0( ω θ R j , empleándose en el resto del tema
solamente la parte proporcional igual a )(ω θ R , omitiéndose, por tanto el factor 0,434.
La unidad comúnmente empleada en el estudio de sistemas realimentados para el logaritmo de lamagnitud, es el decibelio.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 322/424
324
El logaritmo de una función transferencia )( ω jT expresado en decibelios es:
)()( log20 ω ω jdbT T = [3]
Expresiones generales de la función transferencia espectral
La función transferencia espectral puede ponerse en forma generalizada como el cociente de dos
polinomios.
))...()...(()(
))...()...(()()(
21
210
ni
mk
p p p p p p p p
z p z p z p z p A pT
−−−×−
−−−×−×= [4]
en el que A0 es la ganancia.
El logaritmo de la función transferencia es una cantidad compleja, la parte real es proporcional al
logaritmo del módulo y la parte imaginaria proporcional al ángulo.
Se presentan dos ecuaciones separadas, una para el logaritmo del módulo y otra para el ángulo.
En los gráficos de Bode se representan estas dos ecuaciones separadas:
( )ω ω log1)( f T db
v = [5]
( ) ( )ω θ ω log2º f = [6]
La función transferencia de la ecuación [4] se convierte en la ecuación [7] para régimen senoidal permanente:
))...()...(()(
))...()...(()()(
21
210
ni
mk
p j p j p j p j
z j z j z j z j A jwT
−−−×−
−−−×−×=
ω ω ω ω [7]
Los factores del tipo ( )k z j −ω y ( )i p j −ω que intervienen en el numerador y el denominador de
la Ec. [7], pueden tomar algunas de las formas siguientes:
1) polo o cero, real negativo simple:
( ) ( ) ⎟ ⎠
⎞⎜⎝
⎛ +=+=α
ω α α ω ω j j F j 11 [8]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 323/424
325
2) polo o cero, real negativo de orden n:
( ) ( )n
nn j j j F ⎟
⎠
⎞⎜⎝
⎛ +=+=α
ω α α ω ω 12 [9]
3) Par de polos complejos conjugados con componente real negativa.
( ) ( )[ ] β α ω −+= j F j3 ( )[ ] ( )222 2 β α αω ω β α ω +++−=++ j j
Llamando a 20
22 ω β α =+ y definiendo la constante de amortiguamiento relativa0ω
α γ = ,
resulta:
( )
2
00
2
32 ω ω γω ω ++−= j F
jw ⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ −=
0
2
0
2
021
ω
ω γ
ω
ω ω j [10]
3’) Par de polos imaginarios conjugados.
Es un caso particular del anterior para 0=γ
( ) ( )( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=−+=
2
0
20'3 1
ω
ω ω β ω β ω ω j j j j F j
Considérese ahora un caso de la ecuación [7] que incluya todos los tipos de factores posibles,
dejando los polos imaginarios conjugados como un caso particular de los complejos conjugados.
[ ][ ]
[ ][ ])()())((
)()())(()(
666654
3333210
β α ω β α ω α ω α ω
β α ω β α ω α ω α ω ω
j j j j j j
j j j j j j A jT
n
m
++−+++
++−+++×= [11]
La ecuación [11] puede escribirse de acuerdo a las ecuaciones [8] a [10] inclusive:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ −++
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛ +++
×=
066
2
6054
033
2
0321
20654
203210
21)1()1(
21)1()1(
..
...)(
ω
ω γ
ω
ω
α
ω
α
ω
ω
ω γ
ω
ω
α
ω
α
ω
ω α α
ω α α ω
j j j
j j j
A jT
n
m
n
m
[12]
Resultando una nueva constante k modificada por cada uno de los polos y ceros de distinta
manera, según las características de estos.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 324/424
326
En efecto
20654
20321
0..
...
ω α α
ω α α
n
m
Ak = [13]
De acuerdo a la ec. [3] y teniendo en cuenta las Ecs. [12] y [13], la respuesta de amplitud,expresada en decibeles es:
] −+−+++++=03
32
0321)( 2)(1log201log201log20log20
ω
ω γ
ω
ω
α
ω
α
ω ω j jm jk T
db
066
2
06542)(1log201log201log20
ω
ω γ
ω
ω
α
ω
α
ω j jn j +−−+−+− [14]
Donde puede verse que los factores debido a los polos, sólo difieren de los correspondientes a los
ceros del mismo tipo, en que están multiplicados por (-1).
La respuesta de la fase resulta:
−⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++=
4033
2
3021)( 12111
α
ω
ω
ω γ
ω
ω
α
ω
α
ω θ θ ω j Arg j Arg jmArg j Arg k
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
+⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
−−⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
+− 066
2
605 211 ω
ω
γ ω
ω
α j Arg
w
j Arg n [15]
Donde º0=k θ si k es positivo y π θ =k si k es negativa.
También en este caso resulta que los argumentos de los factores correspondientes a los polos son
iguales y de signo opuesto que los de los ceros de igual tipo.
Si se observan las Ecs. [14] y [15], tanto el log. del módulo como el ángulo, dado por estas
expresiones, son función de la frecuencia.
Cuando se trazan dichos valores en una grafica resultan curvas conocidas como diagramaslogarítmicos del módulo y de la fase.
Las ecuaciones [14] y [15] indican que las curvas resultantes se obtienen por suma o resta de los
términos individuales de la ecuación de la función transferencia.
Los diagramas logarítmicos del módulo y de la fase de la función transferencia se emplean para
analizar la respuesta de los sistemas realimentaos de control.
Se obtiene fácilmente de estos diagramas cierta información cualitativa sobre la estabilidad
relativa.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 325/424
327
Pueden combinarse ambas curvas en otra única, que con las frecuencias como parámetro, da la
magnitud en función del ángulo.
Esta curva conocida como diagrama log. magnitud - ángulo, corresponde al trazado de Nyquist,y se emplea para apreciar valores cualitativos en el proyecto de un sistema realimentado quecumpla determinadas especificaciones de comportamiento.
Trazado de los diagramas logarítmicos del módulo y fase
Para encontrar la forma de construir los gráficos de Bode, bastará con analizar por separado la
influencia de cada uno de los términos de las Ecs. [14] y [15] y luego sumar los resultados para
cada gráfico.
El análisis será hecho en cada caso primero para el módulo y luego para el argumento.
1) Término constante: El primer término de la Ec. [14] es, de acuerdo a la Ec. [13]
20654
20321
0..
...log20log20
ω α α
ω α α
n
m
Ak = [16]
La Ec. [16] muestra que el término constante es la expresión en decibeles del factor de escala A0,
multiplicado por las constantes de atenuación de todos los ceros reales negativos elevados al
orden de los mismos y los cuadrados de las pulsaciones naturales correspondientes a los ceros
complejos conjugados, estando dividido por los mismos factores, debido a los polos.
Si se desarrolla la Ec. [16] queda:
210 log20log20log20log20 α α m Ak ++= 5403 log20log20log40 α α ω n−−+
06log40 ω − [17]
Que permite expresar la anterior ecuación de otra forma, ya que las contribuciones de los ceros
son la adición de:
α log20m , para ceros reales negativos de orden m
, para pares de ceros complejos conjugados0log40 ω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 326/424
328
En el caso de los polos, los términos son iguales pero de signo opuesto.
En cuanto a k θ , como ya se dijo, será igual a 0 ó 180º según su valor sea positivo o negativo,
respectivamente.
En la Fig. 22 se representan gráficamente las componentes de las respuestas de amplitud y fase
debidas a este termino.
2) Cero real negativo: Para hallar la componente de la respuesta en frecuencia de amplitud
debida a un cero real negativo simple hay que considerar el segundo factor de la Ec. [14].
]⎥⎥
⎦
⎤⎢⎢
⎣
⎡⎟⎟
⎠ ⎞
⎜⎜⎝ ⎛ +=⎟⎟
⎠ ⎞
⎜⎜⎝ ⎛ +=+= 2
1
2
11)(1 1log101log201log20
α
ω
α
ω
α
ω ω j F
db [18]
Vamos a utilizar una aproximación asintótica para dibujar la curva.
Ella surge de analizar la Ec. [18] para ω tendiendo a cero e infinito.
Para 0→ω es2
11 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ >>
α
ω , resultando en la ecuación [18]
01log10
0
)(1 =≅
⎥⎥⎥
⎦
⎤
⎯→ ⎯ db
F
ω
ω Entonces 0)(1 =
db F ω [19]
Para ∞→ω es2
11 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ <<
α
ω , por lo que la ecuación [18] queda:
] ω α α
ω
α
ω
ω
ω log20log20log20log10 11
2
1)(1 +−==⎟⎟
⎠
⎞⎜⎜⎝
⎛ ≅
∞ ⎯→ ⎯
db F [20]
La Ec. [20] corresponde a una recta del tipo Mx y y += 0 donde:
)(ω θ
log ω
] k k db log20=
20654
20321
0log20ω α α
ω α α
n
m
A π
)0(º180)( <= k ω θ
( ) )0(º0 >= k ω θ
log ω
a) b)
Fig. 22

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 327/424
329
∞ ⎯→ ⎯
=
ω
ω db F y )(1
10 log20 α −= y
20=
log= x
La pendiente de la asintótica dada por la Ec. [20] es:
≅=ω
ω
log
)(1
d
dF M db 20
log
log201 =
⎥⎦
⎤⎢⎣
⎡
ω
α
ω
d
d
[21]
La Ec. [21] dice que a un incremento unitario logΔ le corresponde un aumento de 20db.
Como:
logΔ 1logloglog1
212 ==−=
ω
ω ω ω
Equivale a una relación 101
2 =ω
ω , llamada década, resulta que la pendiente puede expresarse
década
db M 20=
También suele usarse una relación 21
2 =ω
, llamada octava, para la cual es:
logΔ 3,02loglog1
2 ===ω
ω
Tratándose de una recta, para un incremento 3,0log =Δ en lugar de 1 resultará:
3,0log)(1 =ΔΔ
ω ω F dbdb F 63,0203,01log)(1 =×=×Δ=
=Δ ω ω
Luego la pendiente de la asíntota resulta:
década
db M 20=
década
db6= [22]
En la Fig. 23 se representa la curva y sus asíntotas.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 328/424
330
La intersección de las asíntotas se produce para 0log201
=α
resultando 1α =c que se
denomina pulsación de quebradura o ruptura.
El máximo apartamiento entre la curva real y la aproximación asintótica se produce para
1α =c , resultando, de acuerdo a la ecuación [18].
( )] db F dbc 32log101log102
1
11 ==
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=
α
α ω
Normalmente las asíntotas para ω igual a cero e infinito y el punto de la curva correspondiente a
la pulsación de quebradura 1α =c , bastan para trazar la curva real con suficiente
aproximación.En caso contrario, se pueden corregir los errores para otros puntos.
Por ejemplo para 5,01
=α
el error es igual a:
01log102
1−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=
α
ω E ( ) =+= 25,01log10 0,969db db1≅
Análogamente para 21
=α
ω el error resulta:
Aproximaciónasintótica
Curva real
década
db M 20=
10
20
30
] 1)(1 1log20 α
ω
j F dbw +=
3db
logω
Fig. 23
110α ω =c1α ω =c

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 329/424
331
=−+=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ += 2log20)21(log10log201log10 2
1
2
1 α
ω
α
ω E 0,969db db1≅
Del mismo modo se obtienen los errores para 1,01 =α y 101 =α que resultan de 0,04db.
Para completar el análisis de este término se estudiará la respuesta de fase dada por el segundo
factor de la Ec. [15].
Esto es:
( )11
1 )1arg(α
ω
α
ω ω θ arctg j =+= [24]
La aproximación asintótica es:
Para 0→ es º00)0(1 == arctg θ
Para ∞→ es º90)(1 +=∞=∞ arctg θ
Para 1α → es º451)( 11 == arctg α θ
La Fig. 24 muestra la curva de fase y su aproximación asintótica, completada en la parte central
con una recta.
3) Polo real negativo simple: El factor a considerar es el quinto de la Ec. [14]
]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−=+−=
2
44)(2 1log101log20
α
ω
α
ω ω j F
db
Comparando la Ec [25] con la Ec [18] se ve que sólo difieren en el signo.
Aproximaciónasintótica
Curva real
45º
90º
30
110α ω =
log ω
Fig. 24
11,0 α ω =c 1α ω =
1
1 1arg)(
α
ω ω θ j+=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 330/424
332
En consecuencia, la frecuencia angular de quebradura será, en este caso:
4α =c
y las asintotas serán el eje horizontal y una recta de pendiente negativa
década
db M 20=década
db6−=
que corta el eje horizontal para 4α =c
En la figura 25 se muestra la curva y la aproximación asintótica.
Análogamente, el argumento dado por el quinto termino de la Ec [15] es:
( )44
4 )1(argα α
ω θ arctg j −=+−=
Que resulta de igual valor y signo opuesto al de la Ec. [24].
En consecuencia, la respuesta de fase será la imagen especular respecto del eje horizontal, de la
representada en la fig. 24, como se muestra en la fig. 26.
década
db M 20=
AproximaciónCurva real-10
-20
-30
]4
1log20)(2α
ω ω j
db F +=
logω
Fig. 25
4α ω =c 410α ω =
3db

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 331/424
333
4) Ceros y polos reales negativos múltiples:
Para estudiar la respuesta de amplitud se deben analizar los términos 3º y 6º de la Ec. [14].
Ellos son:
]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=+=
2
12)(3 1.log.101.log.20
α
ω
α
ω ω m jm F
db [26]
]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−=+−=
2
55)(4 1.log.101.log.20
α
ω
α
ω ω n jn F
db [27]
La Ec. [26] es igual a la [18], multiplicada por m, mientras que la ecuación [27] es igual a n
veces la Ec. [25].
En consecuencia, las respuestas en frecuencia de amplitud, serán similares a las representadas en
la Fig. 23 y 24, pero con pendientes década
db
m20 y década
db
n20 respectivamente como se ve en
las Fig. 27 y 28.
Aproximaciónasintótica
Curva real-10
-20
-30
logω
Fig. 26
4α ω =c 410α ω =
41arg)(2
α θ
w jw +−=
41.0 α ω =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 332/424
334
Los argumentos están dados por los términos 3º y 6º de la Ec. [15].
Son ellos:
223 .)1.()(
α α ω θ tg arcm j Arg m =+= [28]
( )55
4 .)1.(α α
ω θ tg arcn j Arg n −=+−= [29]
década
dbn M 20=
AproximaciónasintóticaCurva real
-n10
-n20
-n30
]5
1.log.20)(4α
ω ω jn
db F +−=
logω
Fig. 28
5α ω =c510α ω =
n3db
Aproximaciónasintótica
Curva real
década
dbm M 20=
m10
m20
m30
]2
1.log.20)(3α
ω jm
dbw F +=
m3dblogω
Fig. 27
2α ω =c 210α ω =c

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 333/424
335
Comparando la Ec. [28] con la Ec. [24], resulta evidente que la componente de la respuesta de
fase debido a un cero real negativo m, es igual a la de un cero real negativo simple (con la misma
pulsación de ruptura), multiplicada por m.
Análogamente la componente de respuesta de fase debida a un polo real negativo de orden n, se
obtiene multiplicando por n la correspondiente a un polo real negativo simple con la misma pulsación de quebradura.
Las curvas se obtendrán multiplicando las ordenadas de la Fig. 24 y 26 por m y n
respectivamente.
Si se trabajara con funciones de fase no mínima, el cero podría estar a la derecha del eje jω.
En este caso, el factor de la Ec. [9] se convierte en:
( ) mmm j j ⎟ ⎠ ⎞⎜
⎝ ⎛ −=−
α ω α α ω 1 [30]
Que conduce a la misma respuesta de amplitud que la Ec. [26]
( )]⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ +=−=2
3 1.log.101.log.20'α
ω
α
ω ω m jm F db
En cuanto al argumento resulta:
⎟ ⎠
⎞⎜⎝
⎛ −=−=α
ω
α
ω ω θ tg arcm j Arg m .)1.()('3
Que tiene igual valor y signo opuesto que la ecuación [28].
5) Par de polos complejos conjugados: La componente de la respuesta de amplitud se obtiene
analizando el cuarto término de la Ec. [14].
( )]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
2
033
22
03033
2
035 21log1021.log20
ω
ω γ
ω
ω
ω
ω γ
ω
ω ω j F
db
La aproximación asintótica es:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 334/424
336
Para 0→ es ( )] 01.log101 5
2
03=≅∴⎟⎟
⎠
⎞⎜⎜⎝
⎛ >>
∞ ⎯→ ⎯ ω
ω ω
ω db F
Que coincide con el eje logω.
Para ∞→ es2
031 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ <<
ω
ω
( )]⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ ≅
∞ ⎯→ ⎯
23
2
03
2
03
2
03
23
4
035 4.log104.log10 γ
ω
ω
ω
ω
ω
ω γ
ω
ω ω
ω
db F
y como 23
2
03
4γ ω
ω >>⎟⎟
⎠
⎞⎜⎜⎝
⎛ resulta:
( )] ω ω ω
ω ω
ω
log40log40.log10 034
035 +−=⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
∞ ⎯→ ⎯ db F [32]
La ecuación [32] es del tipo:
Mx y y += 0
De modo que en el par de ejes ( )]∞ ⎯→ ⎯
=ω
db F y 5 ; log= x representa una recta de pendiente
décadadb M 40= , que corta el eje horizontal en una pulsación de quebraduras o ruptura:
23
2303 β α ω ω +==c
La corrección a sumar a la aproximación asintótica para pasar a la curva real es:
Para 03ω ω <
( )] ] ]⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −==−=
→
2
033
2
035
055 21log10)()('
ω
ω γ
ω
ω ω ω ω
ω dbdbdb F F F c
[33]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 335/424
337
Mientras que para 03> es:
( )] ] ] ==−=∞→
dbdbdb F F F c )()('' 555ω
03
2
033
22
03log4021log10
ω
ω
ω
ω γ
ω
ω −
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎥⎥
⎦
⎤⎢⎢
⎣
⎡⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −= [34]
Las Ecs. [33] y [34] nos muestran que el error es función de la constante de amortiguamiento
relativa o normalizada
23
23
3
03
3
3 β α
α
ω γ +==
En la figura 29 se representa la aproximación asintótica y las curvas reales de la respuesta de
amplitud para γ= 0; 0,1; 0,3; 0,5; 0,707; y 1
03ω ω =
Aproximaciónasintótica
década
db40
10
20
30
]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟⎟
⎠
⎞⎜⎜
⎝
⎛ −=
03
322
03
1log20)(5ω
ω γ
ω
ω ω jdb F
logω
40
13 =γ
5,0
3,0
1,0
03 =γ
-10
-20
031,0 ω ω =
0310ω ω =
Fig. 29
707,0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 336/424
338
La componente de la respuesta de fase surge de analizar el cuarto término de la Ec. [15].
2
03
033
033
2
035
1
2
21)(
⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ −
=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+⎟⎟
⎠
⎞⎜⎜
⎝
⎛ −=
ω ω
ω γ
ω
ω γ
ω
ω ω θ arctg j Arg [35]
Para 0→ es 12
03<<⎟⎟
⎠
⎞⎜⎜⎝
⎛
ω
ω , de modo que:
02
.lim)0( 033
05 =⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
→ ω
ω γ θ
ω tg arc
Para ∞→ es 12
03
>>⎟⎟
⎠
⎞⎜⎜
⎝
⎛
ω
ω , resultando:
º1802
.lim)( 0335 =⎟
⎠
⎞⎜⎝
⎛ −=∞∞→ ω
ω γ θ
ω tg arc
Para 03ω ω = es:
º900
2.lim)( 3
305 ⇒⎟ ⎠
⎞⎜⎝
⎛ =∞→
γ ω θ
ω tg arc
En la Fig. 30 se muestran las curvas de respuesta de fase reales para γ= 0; 0,1; 0,3; 0,5; 0,707; y
1 y la aproximación asintótica con dos rectas horizontales de 0º a 180º y una vertical que pasa
por 03= .
Nótese que las respuestas de amplitud y fase para un par de ceros imaginarios conjugados se
obtienen como caso particular para 0=γ , en las ecuaciones y los gráficos.
Si se trabajara con funciones de fase no-mínima los ceros podrían aparecer en el semiplano
derecho.
En el caso, el factor a considerar en lugar del dado por la Ec. [10] sería:
⎥⎥
⎦
⎤⎢⎢
⎣
⎡ +⎟⎟ ⎠ ⎞
⎜⎜⎝ ⎛ −
0
2
0
20 21
ω
ω γ
ω
ω ω j
Que conduce a las siguientes respuestas de amplitud y fase:
( )]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=−⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
2
0
22
00
2
05 21log1021.log20'
ω
ω γ
ω
ω
ω
ω γ
ω
ω ω j F db
[36]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 337/424
339
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
−=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
2
0
0
0
2
05
1
2
21)('
ω
ω
ω
ω γ
ω
ω γ
ω
ω ω θ arctg j Arg [37]
La Ec. [36] coincide con la [31], mientras que la Ec. [37] sólo difiere de la Ec. [35] en el signo.
6) Par de polos complejos conjugados: Las respuestas de amplitud y fase están dadas
respectivamente por los últimos términos de las Ecs. [14] y [15]:
]06
3
2
06)(6 21.log20
ω
ω γ
ω
ω ω j F db −⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−= [38]
=⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−=
063
2
066 21)(
ω
ω γ
ω
ω ω θ j Arg [39]
Comparando la ecuación [38] con la ecuación [30] y la ecuación [39] con la ecuación [35] se ve
que las componentes de las respuestas en frecuencia de amplitud y fase debidas al polo complejo
conjugado, son iguales en valor y con el signo opuesto a las del cero complejo conjugado de
igual γ y 0 , por lo que no se justifica el análisis y la representación gráfica.
También en este caso, para 0=γ se obtienen las respuestas correspondientes a un par de polos
imaginarios conjugados.
90º
180º
0310ω ω =
lo ω
Fig. 30
301,0 ω ω = 03ω ω =
)(ω θ
0,1
0,3
0,5
707,03 =γ
13 =γ
03 =γ
120º
40º

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 338/424
340
7) Ceros y polos en el origen: Si bien parece razonable tomar un cero o un polo en el origen
como el caso particular para 0=α de un cero o un polo real negativo, el enfoque con que se ha
encarado el desarrollo de los gráficos de Bode no lo permite.
En efecto, la Ec. [8].
( ) ( )n
nn j j j F ⎟
⎠
⎞⎜⎝
⎛ +=+=α
ω α α ω ω 1
Muestra que al tomar 0=α en el último miembro aparece una operación no permitida.
Por lo tanto, los ceros y los polos en el origen deben ser analizados sin afectar el valor de la
constante k de la Ec. [13] y [14], empleando los dos primeros miembros de la Ec. [8] con 0=α .
Esto es:
( ) ( ) ( )nn j j j F ω α ω ω =+= [40]
Para el caso de un cero de orden m en el origen, las componentes de la respuesta de amplitud
resultan:
ω ω ω log20log20)(7 m jm F db
=−= [41]
Que es la ecuación de una recta.
En efecto, si se denomina:
db F y )(7 ω =
m M 20=
log= x ∴ Mx y =
La recta corta al eje horizontal para ω = 1 y tiene una pendiente
década
dbm M 20=
octava
dbm6=
Como se muestra en la figura 31

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 339/424
341
En cuanto al argumento su expresión es:
( ) ctem j Arg w m === º90)(7 ω θ [42]
Que se representa en la figura 32
Para un polo en el origen de orden n es:
] ω ω
ω log201
log20)(8 n j
F ndb
−== [43]
Que sólo difiere de la Ec. [41] en el signo, y:
( )cten
j Arg
n =−== º90
1)(8
ω ω θ [44]
Que corresponde a la ecuación [42] con el signo cambiado.
m90º
m jw Arg w )()(7 =θ
logω
Fig. 32
10=ω 1.0=ω
Cte=)(7 ω θ
1=cω
década
db M 20=
-m20
m20
m40
ω ω .log.20)(7 mdb
F =
lo ω
Fig. 31
10=ω
1.0=ω
-m40
1=cω

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 340/424
342
En consecuencia, los gráficos serán los de la figura 31 y 32 con el signo, de las ordenadas y la
pendiente, cambiada.
En la figura 33 se resumen todos los casos elementales analizados.
Construcción de los gráficos asintóticos: Para construir los gráficos de las respuestas enfrecuencia de amplitud y fase, se procede de la siguiente manera:
1º) Se trazan los ejes.
2º) Se identifican las pulsaciones de quebradura en el eje horizontal
3º) Se calculan y representan en los gráficos de amplitud y fase, k log y k Arg ,
respectivamente.
Recordar que si k > 0 es 0=k Arg θ y para k < 0 es º180=k θ
4º) Se representan las asíntotas de las componentes correspondientes a los ceros y polos.
5º) Se suman las componentes.
6º) Se agregan las correcciones y se trazan las curvas reales
Nótese que los ceros producen quebraduras de la respuesta de amplitud en las pulsaciones de
ruptura ωc, en sentido antihorario, con variaciones de la pendientedécada
dbn20
década
dbn6=
donde n es el orden del cero.
En el caso de polos complejos conjugados ó imaginarios conjugados debe tomarse n = 2.Análogamente, los polos producen quebraduras en las pulsaciones de ruptura en sentido horario,
con variaciones de la pendiente de:
⎟ ⎠
⎞⎜⎝
⎛ −década
dbn20 ⎟
⎠
⎞⎜⎝
⎛ −=
década
dbn6
En cuanto a la fase, la variación total por cada cero de orden n ubicado en el semiplano izquierdo
es de n90º, y por cada polo (-n90º).
Ejemplo:
Hallar los gráficos de Bode correspondientes a la siguiente función transferencia:
)10()20(
)105()2(4)(
3
3
+×+
×+×+×=
p p
p p pT [45]
En régimen senoidal permanente resulta:
)10()20(
)105()2(
4)( 3
3
+×+
×+×+
×= ω ω
ω ω
ω j j
j j
jT
Que puede escribirse:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 341/424
343
=+×+
×+×+
××
×××=
)10
1()20
1(
)105
1()2
1(
1020
10524)(
3
3
3
3
ω ω ω
j j
j j
jT
)10
1()20
1(
)105
1()2
1(
2
3
3
ω ω j j
j j
+×+
×+×+
× [46]
La transferencia dada por la ecuación [46] tiene una constante de escala ya modificada por los
ceros y los polos de valor:
( )2
10.20
10.524
.
.3
3
43
210 ===
x Ak
α α
α α
que contribuye a la respuesta de amplitud con un término constante:
] dbk k db 62.log20log20 ===
Existen dos ceros reales negativos simples que introducen pulsaciones de quebradura
seg
rad c 21 =ω y
seg
rad c
34 10.5=ω , con giros de
década
db
octav
db206 =+ en la curva.
Además hay dos polos reales negativos simples que producirán giros de
⎟
⎠
⎞⎜
⎝
⎛ −=⎟
⎠
⎞⎜
⎝
⎛ −década
db
octav
db206 para las pulsaciones de ruptura
seg
rad c 202 =ω y ⇒
seg
rad c
33 10=ω
En la figura 34 se han representado las componentes y la aproximación asintótica de la respuesta
de amplitud total, así como las correcciones y la curva real.
Con igual criterio se han dibujado las componentes, la aproximación asintótica y la curva real de
la respuesta de fase en la figura 35.
El argumento de k se ha tomado igual a cero por ser k> 0.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 342/424
344
10=ω 1=ω
21 =cω
ω log
)(ω T
60
50
40
30
20
10
-50
-40
-30
-20
-10
ω=102 ω=104
ωc3=103 ωc2=20 ωc4=5x103
3db 3db
3db3db
.6
oct
db
.6
oct
db−
dbk 6.log20 =1
2
34
5
.6
oct
db
× ×
Fig. 34
0
____ Curva real- - - - Aprox. asintótica = 1 + 2 + 3 + 4 + 5
-30

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 343/424
345
-60º
-180º
-90º
-45º
-20º
2
60º
45º
21 =cω
ω log
)(ω T 180º
90º
20º
0
ωc3=103ωc2=20 ωc4=103
1
32
4
3 4
× ×
Fig. 35
ω=1 ω=10210=ω
6º 6º 6º
____ Curva real- - - - Aprox. asintótica = 1 + 2 + 3 + 4

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 344/424
346
FILTROS
DE
ONDAS
Compilación escrita por el Ing. Julio Horacio Verrastro
Profesor Titular de la Cátedra “Teoría de los Circuitos”
UNNE – FACENA - INGENIERIA
Año 1982

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 345/424
347
INDICE Pág.
Filtros de onda Introducción. ................................................................................................................... 319
Impedancia característica de una red de reactancias puras. ..................................................................... 351
Absorción de potencia por parte de una red de reactancias puras. …....................................................... 352
Constante de propagación de una red de reactancias puras. ................................................................... 353
Determinación de las bandas de transmisión y de atenuación. ............................................................... 355
Las redes escaleras, como filtros. .......................................................................................................... 358
Bandas de atenuación y de paso en los filtros. ....................................................................................... 359
Apéndice I. .............................................................................................................................................. 362
Clasificación de Los filtros mediante funciones hiperbólicas. ............................................................... 366
Filtros de K constante. ............................................................................................................................. 370
Apéndice II. ………………………….................................................................................................... 372
Representación gráfica de Z01,Z0π. ......................................................................................................... 373
Filtros pasa bajo de K constante elemental. ........................................................................................... 374
Proyecto de un filtro pasa bajo de K constante. ..................................................................................... 377
Filtro pasa alto de K constante. ............................................................................................................. 379
Filtros pasa banda de K constante. ........................................................................................................ 382
Apéndice III. .......................................................................................................................................... 386
Analogía entre pasa bajo y pasa banda. ................................................................................................. 388
Filtros elimina banda de K constante. ................................................................................................... 389
Apéndice IV. ......................................................................................................................................... 393
Análisis de los efectos disipativos en los filtros. ................................................................................... 395
Conclusiones. ......................................................................................................................................... 397
Filtros M-derivados secciones Tm-derivados. ....................................................................................... 399
Variación de α y β en filtros m- derivados. ............................................................................................ 402
Frecuencia de atenuación infinita. .......................................................................................................... 405
Medias secciones de terminación. ........................................................................................................... 407

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 346/424
348
Apéndice V. ............................................................................................................................................ 408
Propiedad adaptadora de las medias secciones. ...................................................................................... 408
Media sección derivada de la T prototipo. ............................................................................................... 410
Secciones π m-derivadas. ........................................................................................................................ 412
Media sección derivada π prototipo. ....................................................................................................... 414
Filtros compuestos. ................................................................................................................................. 416
Resumen de procedimientos de diseño. .................................................................................................. 417
Efectos de los elementos disipativos. ..................................................................................................... 421
Criterio de proyecto de un filtro completo. ........................................................................................... 427

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 347/424
349
FILTROS DE ONDA
Introducción
En los sistemas de comunicación, resulta a menudo conveniente discriminar entre distintas
bandas de frecuencia aceptando unos grupos y rechazando otros.
Las combinaciones que satisfacen este propósito se denominan en general “filtros de onda”.
Estas combinaciones difieren de los circuitos sintonizador ordinario por el hecho de que proveen
una transmisión sustancialmente constante dentro de las bandas aceptadas, cuyos límites puede
elegir a voluntad el proyectista.
Desde el punto de vista de lo ideal, los filtros no deberían producir atenuación alguna dentro de
la banda deseada y causar en cambio, una atenuación infinita en todas las otras frecuencias.
Estas bandas se llaman bandas de “transmisión” o “pasante” y de “atenuación” o “detenida”
respectivamente.
Los filtros reales no satisfacen esta exigencia ideal e introducen sólo una atenuación finita en las
frecuencias indeseadas.
La mayor o menor discrepancia entre los comportamientos de un filtro ideal y uno real, depende
de la cantidad de reflexiones debida a las desigualdades de las impedancias terminales , así como
de las pequeñas pérdidas introducidas por los conductores y dieléctricos imperfectos.
Estas consideraciones hacen que el filtro real posea una atenuación finita en la banda detenida,
pero ésta puede hacerse tan grande como se desee usando un número adecuada de mallas de
correcto diseño.
Por otra parte la transmisión de señales de alta calidad exige que los filtros estén exentos de las
distorsiones de amplitud o (frecuencia) y de retraso o (fase).
Suponiendo que las impedancias de terminación sean la impedancia característica para el caso de
un cuadripolo simétrico o la impedancia imagen por el de un cuadripolo asimétrico, la distorsión
de amplitud introducida por un cuadripolo depende de la forma de su característica de
atenuación.Para mantener la propiedad de las señales transmitidas, no deben alterarse las magnitudes
relativas de las componentes de frecuencia de la señal, por lo que la característica de atenuación
del filtro en la anchura de banda de las señales transmitidas deberá ser plana o nula.
Fuera de este intervalo de frecuencias, el filtro deberá tener una atenuación suficientemente
grande para suprimir las demás señales.
La distorsión de retrazo se introduce cuando la función de fase de un cuadripolo no es lineal.
Resulta entonces que las diferentes componentes de frecuencia de la señal, se transmiten a través

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 348/424
350
del filtro con diferentes velocidades de fase y por lo tanto, precisan diferentes “tiempos de
transito”.
En general, los efectos de esta distorsión se hacen importantes cuando se conectan en cascada
muchos cuadripolos, en cuyo caso se suman los tiempos de tránsito.
En los sistemas utilizados en la transmisión de voz, ésta distorsión de retraso no presenta mayorinconveniente dado que la distorsión de fase o retardo no es en general reconocida por el oído
humano.
Pero en la transmisión de imágenes, como por ejemplo en los sistemas de facsímil y de
televisión, se ha demostrado que la distorsión de retardo puede ser tan importante como la
distorsión de frecuencia.
En estos sistemas es imperativo tomar en cuenta la característica de fase o retardo.
De todo lo anterior, resulta evidente que la acción del filtro ideal restringe mucho lascaracterísticas de los cuadripolos
Cuando las características de atenuación y fase se apartan de las condiciones ideales en una
cantidad mayor que la permitida, por lo anteriormente visto, habrá que añadir al sistema de
filtros unas redes correctivas llamadas “igualadores” o “ecualizadores”, que pueden ser
igualadores de atenuación o igualadores de fase.
Es de destacar que existen dos diferentes criterios de diseños de los circuitos de filtros, llamados
en general “clásico” y “moderno”.
Según el criterio clásico, desarrollado por Campbell, se analiza una clase dada de redes con el
objeto de tabular sus características de atenuación y de fase en función de la frecuencia.
Luego dada una característica de atenuación deseada, el proyectista puede elegir la red en
particular cuya característica de atenuación se aproxime lo más posible a la deseada.
Según el criterio clásico, no se hace ningún intento para obtener simultáneamente características
de atenuación y de fase (o de retardo) independientemente establecidas.
Sólo se atiende a la atenuación α y el proyectista debe conformarse con la característica β con
ella asociada.
En contraste con este criterio, el proyectista, según el punto de vista moderno, parte de la
respuesta deseada tanto de α como de β y diseña la red necesaria, cuya configuración es
desconocida al principio del proceso (a este proceso se lo denomina síntesis).
En la practica es por lo común imposible satisfacer exactamente ambas, características y el
proyectista debe conformarse con aproximarse a ellas.
Este ultimo método aunque mas poderoso que el clásico, requiere herramientas matemáticas que
escapan, por ahora al alcance de este programa.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 349/424
351
Por ultimo diremos que el estudio de los filtros eléctricos que a continuación iniciaremos,
comprenderá el examen de las funciones de “transmisión” o “propagación”, ya visto en teoría de
cuadripolo, dirigido a determinar su comportamiento como funciones de la frecuencia.
El estudio preliminar se realiza suponiendo que todos los filtros están terminados de manera que
se eliminen los fenómenos de reflexión.En los filtros simétricos por tanto es preciso que la terminación (impedancia de carga), sea igual
a su impedancia característica Z0.
En las estructuras asimétricas, será preciso que los dos pares de terminales estén cerrados
(cargados) mediante las impedancias imágenes Z01 y Z02 .
Luego cuando se conectan en cascada varios cuadripolos, las conexiones se realizarán, a menos
que se especifique otra cosa, sobre la impedancia imagen para estructuras asimétricas y sobre
impedancia característica en el caso de estructuras simétricas.Es evidente que al imponer dichas terminaciones, el estudio introduce limitaciones muy
definidas, cuya naturaleza se pondrá de manifiesto al ir desarrollando la teoría.-
Impedancia característica de una red de reactancias puras
Como se ha dicho mas arriba, un filtro ideal debería presentar una atenuación nula en la banda
pasante, condición que sólo puede satisfacerse si los elementos del filtros no tienen disipación y
que no puede así realizarse en la practica.Sin embargo, si los componentes son sólo inductores y capacitores de alto factor de calidad, sus
resistencia efectivas en serie serán pequeñas y también serán pequeñas las pérdidas en la banda
pasante.
Por esta razón, los filtros de onda se diseñan suponiendo que sus componentes están libres de
pérdidas lo que equivale a decir que el diseño se basa en elementos puramente reactivos.
Habíamos visto en teoría de cuadripolos que la impedancia característica de una red simétrica de
cuatro terminales es:
ecceca Z Z Z .0 = [1]
Si los elementos de una red son reactancia puras, hay cuatros posibles combinaciones de los
signos de Zeca y Zecc
Condición 1 Zeca = + j.Xa y Zecc = - j.X b
Condición 2 Zeca = - j.Xa y Zecc = + j.X b
Condición 3 Zeca = + j.Xa y Zecc = + j.X b Condición 4 Zeca = - j.Xa y Zecc = - j.X b

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 350/424
352
Donde Xa y X b son números reales positivos
De satisfacerse las condiciones 1 o 2
baba X X X X j Z ...20 ±=−= [2]
En este caso la impedancia característica es una resistencia pura.Sólo la raíz positiva corresponde a una terminación pasiva físicamente realizable.
Si se satisfacen las condiciones 3 o 4:
baba X X j X X j Z ...20 ±=+= [3]
En este caso la impedancia característica es una reactancia pura.
En otros términos, si las impedancias de entrada son reactancias de signos opuestos, la
impedancia característica es una resistencia pura, mientras que si aquellas tienen el mismo signo,la impedancia característica es una reactancia pura.
Al variar la frecuencia, puede variar el valor y aun el carácter de Zeca y Zecc.
Dentro de una gama de frecuencias Zo puede ser una resistencia pura, mientras que dentro de otra
gama, ella puede ser una reactancia pura.
Absorción de potencia por parte de una red de reactancias puras
Si la impedancia característica de una cascada de secciones es una resistencia pura y cadasección esta formada por reactancias puras, la cascada absorbe potencia de un generador si al
mismo tiempo esta terminada en su impedancia característica Zo.
Dado que los elementos del filtro no pueden absorber potencia alguna, toda la potencia de
entrada debe ser transferida a la carga o terminación.
Si no se pierde potencia y la impedancia característica es una resistencia pura, | E1 I1 | debe ser
igual a | E2 I2 |.
Además, en una cascada terminada en Zo es:2
1
2
1
I I
E E = .
Como resultado de estas igualdades es: 21 E E = e 21 I I = , con lo que la atenuación es
cero._
Si la impedancia característica de una cascada de secciones es una reactancia pura y la cascada
está terminada en Zo, ella no absorbe potencia alguna del generador y la tensión y la corriente
guardan una diferencia de fase de 90º en todos los puntos de la cascada.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 351/424
353
Seria físicamente posible que tal línea tuviera, atenuación, porque cualquier disminución de
tensión o de corriente, no involucra disipación alguna de potencia cuando E e I tienen una
diferencia de 90º
Constante de propagación de una red de reactancias puras
Se había visto en teoría de cuadripolos, que la constante de programación de una red simétrica
está dada por la ecuación.
Zeca
Z tgh ecc=γ [4]
Si se satisface la condición 1 ó 2
Xa
X
j Xa
X
tgh bb
.=
−
=γ [5]
Mientras que si satisface la condición 3 ó 4
Xa
X
Xa
X tgh bb =
+=γ [6]
Esto demuestra que, si la impedancia característica es una resistencia pura, la tangente
hiperbólica de la constante de propagación es un imaginario puro, mientras que si Zo es una
reactancia pura, tgh γ es un número real.Pero:
β α β α
β α β α
β α
β α β α γ
senhj senh j
senhj j senh
j
j senh jtghtgh
.cosh.cosh
.coshcosh.
)cosh(
)()(
++
=++
=+=
Pero β β coscosh = j y β β jsen senhj =
β α β α
β α β α γ
sen jsenh
sen j senhtgh
.cos.cosh
.coshcosh.
+
+=∴
Racionalizando
β α β α
α α β β β β α α
β α β α
β α α β β α β β α β α α
β α β α
β α β α
β α β α
β α β α
22222222
2222
2222
.cos.cosh).(coshcos).(coscosh.
.cos.cosh
..cosh.cos.cos..coshcos.cosh.
).cos.(cosh
).cos.(cosh.
).cos.(cosh
).coshcos(
sen senh
senh jsen sen senh
sen senh
sen senh sen jsenh sen j senh
sen jsenh
sen jsenh
sen jsenh
sen j senh
+−++=
+
+−+=
=−−
++

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 352/424
354
Pero, 1)(cosh)1(cosh 2222 =−+= α α α α senh y senh
α β
β β α α
β β α β
β β α α
β α β α β
β β α α
β α β α
β β α α γ
222222
222222222
coscos.cosh.
).(coscoscos.cosh.
.cos.cos
cos.cosh.
.cos).1(
cos.cosh.
senh
jsen senh
sen senh
jsen senh
sen senh senh
jsen senh
sen senh senh
jsen senhtgh
++=
+++=
=++
+=
++
+=∴
Pero, 1)(cos 22 =+ β β sen
Luego nos queda:
β α
β β α α γ
22 cos
cos.cosh.
+
+=
senh
jsen senhtgh [7]
Si tgh γ es imaginario puro la ecuación [7] demuestra que:
0cosh. =α α senh [8]
Puesto que esto es solo posible con α = o, la atenuación será nula si Zo es una resistencia pura,
según ya se había previsto en el apartado anterior.
Si tgh γ es un numero real la ecuación [7] muestra que
0cos. = β β sen [9]
Por lo tanto si tgh γ es distinto de cero, α α cosh. senh debe ser mayor que cero y tiene que
haber atenuación.
Tal es el caso cuando Zo es una reactancia pura.
Estos principios pueden resumirse en el siguiente teorema:
En una red simétrica de reactancias puras, si la impedancia característica es una resistencia pura,
la constante de atenuación es cero, mientras que si la impedancia característica es una reactancia
pura, la constante de atenuación es distinta de cero.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 353/424
355
Determinación de las bandas de transmisión y de atenuación
Si se representan las reactancias que constituyen las impedancias en cortocircuito y en circuito
abierto de una sección de filtro, es fácil determinar el tipo de filtro de que se trata y la posición
de las bandas de transmisión y atenuación.
En efecto la atenuación es cero en todos los rangos de frecuencia en que estas reactancias tienen
distintos signo.
Analicemos la figura (1):
Las frecuencias críticas que corresponde a los ceros o los polos de Zeca o de Zecc están marcadas
f 1, f
2etc.
Es evidente que la atenuación es nula entre las frecuencias f 1 y f 4 y para las frecuencias
superiores a f 5, porque dentro de estos intervalos son opuestos los signos de Zeca y Zecc.
Las frecuencias que marcan los límites entre las bandas de atenuación y de transmisión se llaman
frecuencias de corte.
En la figura f 1, f 4 y f 5 son frecuencias de corte.
En la fig. (1) es evidente que se produce una frecuencia de corte donde quiera que una de las
curvas presente una frecuencia crítica que no coincida con una frecuencia crítica de la otra curva.
Donde coinciden dos frecuencias críticas, no hay punto de corte.
Estos puntos críticos resultan útiles para el control de la magnitud de la impedancia
características o de la constante de atenuación en las diversas bandas.
Por lo común no es muy conveniente trabajar con las impedancias de cortocircuito y de circuito
abierto.
Consideramos una configuración como el de la figura.
Transmisión
Zecc
Zeca
f 2 f 1 f 3 f 4 f 5
Zecc
f
Transmisión
Atenuación
Atenuación
Fig. 1
ZecaZecc

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 354/424
356
Imponemos, por simplicidad, la condición L1 C1 = L2 C2, es decir, la igualdad de las frecuencias
de resonancia de las dos ramas serie y la rama paralelo.-
Debemos analizar y representar Xeca y Xecc en función de la frecuencia.
Xeca corresponde al circuito a) y Xecc al circuito b)
Representamos a continuación las reactancias Xeca y Xecc en función de ω.
⇒ Zeca
L2 C2
Fig.3 a
⇒ Zecc
L1/2 2C1
a)
L2 C2
L1/2
2C1
b)
Fig.3 b
L1/2 2C1
Z1/2
L2 C2
Fig.2
Z2
L1/2 2C1L1/22C1
Z1/2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 355/424
357
La curva de Xeca presenta un polo en ωo siendo:
22110 .1.1 C LC L ==ω [10]
La frecuencia en la que se producen resonancias serie y paralelos resultando una reactancia
infinita.
El cero de la izquierda se debe a una resonancia serie entre la capacidad equivalente al circuito
serie y la inductancia equivalente al circuito paralelo.
El cero de la derecha representa la resonancia serie entre la inductancia equivalente al circuito
serie y la capacidad equivalente al circuito paralelo.
Puede analizarse de la misma manera Xecc, resultando los polos y ceros intercambiados con Xeca yapareciendo dos nuevos ceros.
La banda de paso se halla simplemente como la zona en que Xeca y Xecc, tienen distintos signo.
Se deduce que ω1 y ω2 son las frecuencias de corte y el filtro resulta ser un pasa banda.
En la práctica cuando el filtro es conocido sólo como una “caja negra” , se pueden hallar las
frecuencias de corte en forma sencilla:
Excitando con un oscilador de frecuencia variable y midiendo la entrada con un voltímetro,
podemos detectar los polos y ceros Xeca
y Xecc,
mediante máximos y mínimos en la indicación
del instrumento.-
Banda de paso
Xecc
Xeca
ω
ω
ω0
ω0
Fig. 4
ω1 ω2
++
- -
XX
X

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 356/424
358
Las redes escalera como filtros
La estructura en escaleras es una de las más comúnmente usadas para la síntesis de los filtros
según el criterio clásico.
Los filtros mas utilizados dentro de las estructuras en escalera son, los reactivos y simétricos
cuya configuración general es la siguiente
Hay dos clases fundamentales de filtros escaleras:
(a) Reciprocos o de k = Cte.
(b) m - derivados (filtros con ceros de transmisión).
El filtro escalera general se estudia tomando secciones simétricas T o π.
Los valores de las impedancias se eligen de manera que al emplear varias secciones iguales entre
si, resulte la configuración general, con los valores Z1 en serie y Z2 en paralelo.
Las características de atenuación y fase son idénticas para circuitos T y π , pero sus impedancias
características son distintas o sea Z0T ≠ Zoπ.
Las secciones T y π no pueden interconectarse entre si por no poder adaptarse las impedancias.
Para ello se utilizan las medias secciones.
Z1/2Z1/2 Z1
2Z2 2Z2 Z2
Fig.6 a- Seccion T Fig.6 b- Seccion π
Z1
Zg
Z1
Z2 Z2 Z2 Z2
Fig.5

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 357/424
359
Bandas de atenuación y de paso en los filtros
Determinaremos ahora las relaciones que nos dan las bandas de paso y de atenuación, en función
de los elementos del filtro, y no en función de Xeca y Xecc, como se venia haciendo anteriormente.
Los resultados, naturalmente, serán validos sólo para la configuración considerada.En el capitulo sobre cuadripolos se demostró que la constante de transmisión de un cuadripolo
pasivo y simétrico, se podía poner en función de las constantes A B C D de dicho cuadripolo, en
la forma siguiente y recordando la definición de A.-
Veremos estos valores para el circuito T pasivo y simétrico.
Donde: 22121
112
Z Z y Z Z
Z =+=
⇒+==∴2
1
21
11
.21
Z
Z
Z
Z A
2
1
.21cosh
Z
Z A +==γ [12]
Esta expresión y las expresiones siguientes son también válidas para el circuitoπ
, como puede
verificarse fácilmente.
Z1/2
Z2 Fig.9- Circuito T
Z1/2
Fig.8
ABCD E2 E1
I1 I2
Z1/2 Z1/2
2Z2 2Z2
Fig.7
21
11
cosh
z
z A
y
j
Donde
A
=
+=
=
β α γ
γ
[11]
[ ]
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
+
⎟ ⎠
⎞⎜⎝
⎛ +=
212
221
2
2
Z Z Z
Z Z Z
z

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 358/424
360
Habíamos dicho que los filtros estarían formados por elementos puramente reactivos, luego.
podemos decir:
11 jX Z = y 22 jX Z = [13]
Desarrollando la Ec. [11]real
Z
Z sen senh j j =+=+=+=
2
1
.21..cos.cosh)cosh(cosh β α β α β α γ [14]
La parte imaginaria se anula, quedando la parte real.
2
1
.21cos.cosh
Z
Z += β α [15]
Esta relación se cumple en las bandas de paso y de atenuación.
En la bandas de paso, la atenuación debe ser nula, esto es, debe ser α = 0 y por tanto cosh α = 1
2
1
.21cos
Z
Z +=∴ β [16]
Como el cosβ varía entre +1 y -1 o sea -1 ≤ cosβ ≤ 1 será:
1.2
112
1 ≤+≤− Z
Z [17]
Llegando así a la siguiente relación fundamental
Esta relación nos define la banda de paso para todo filtro escalera formada por elementosreactivos, en función de Z1 y Z2.
Podemos afirmar que las bandas de transmisión y de atenuación son independientes del hecho
de que Z1y Z2 se dispongan como una sección T o como una sección π.
(Ver apéndice 1)
Banda de paso
0
Fig.10
0.4
12
1 ≤≤− Z
Z Z1/4Z2 ∞−
[18]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 359/424
361
Ejemplo: Consideremos el filtro de la fig 2 y representemos Z1 = f(ω) y 4Z2 = f(ω)
La banda de paso, es la zona limitada por las frecuencias ω1 y ω2 , en las que
Z1 = - 4.Z2
Si las frecuencias de resonancias para las ramas serie y paralelos no fueran iguales, tendrían dos
bandas de paso.
Banda de paso Fig. 11
-Z1
4Z2 Z1
-4Z2
ω
ω1 ω2 ω0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 360/424
362
Apéndice I
Habíamos visto para el circuito T que:
2
1
.21cosh
Z
Z A +==γ [1]
Demostraremos aquí, que el valor de A es el mismo para el circuito π equivalente.
Calcularemos Z11 y Z21 en este cuadripolo π
12
21211 .4
)2.(.2
Z Z
Z Z Z Z Z eca +
+== [3]
Ahora calculamos Z21
221
12212 .2.
.2).2(" Z
Z Z
V V Z I V
+=⇒= [4]
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
+
+=⇒⎟⎟
⎠
⎞
⎜⎜⎝
⎛
+
+=⎟⎟
⎠
⎞⎜⎜⎝
⎛
++=∴21
2
2
12112
212
211212
11 .4 .4..2.4..2
.4.21.2 1 Z Z Z Z Z I V
Z Z Z Z Z V
Z Z Z V I
Remplazando V1 en la [4] nos queda:
).4(
).2.(.2.
).2(
.2.
.4
.4..2.
.2
.2
21
212
21
21
21
22
121
21
22
Z Z
Z Z Z
Z Z
Z Z
Z Z
Z Z Z I
Z Z
Z V
+
+
+=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
+=
).4(.4
212
2
1221
Z Z Z
I V Z
+==∴ [5]
V2 I’1
V1
I1
I’’1
Z1
2Z2 2Z2
Vale la misma definición de A en funciónde los parámetros [Z]:
21
11
Z
Z A = [2]
21
11
2
11
111
2'';
2'
'''
Z Z
V I
Z
V I
I I I
+==
+=
01
221
2 =
= I
I
V Z

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 361/424
363
Luego dividiendo la [3] con la [5]
2
1
2
21
22
21
12
212
.21
.2
.2
.4
).4(.
).4(
).2.(.2
Z
Z
Z
Z Z
Z
Z Z
Z Z
Z Z Z A +=
+=
+++
=
Como vemos la expresión de A, es igual tanto para el circuito T como π.Por lo tanto todo lo que deducimos sobre la condiciones para determinar las bandas de paso
sirven también para el circuito π.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 362/424
364
Ejemplo: consideremos ahora el siguiente circuito:
Si hacemos de manera que las cuatro reactancias que están en paralelo resuenan en la misma
frecuencia que las ramas serie.
Para graficar Z1= f (ω) y 4Z2= f (ω), haremos las consideraciones siguientes:
A los efectos del análisis pondremos a Z1 y Z2 en función de L y C genéricos.
⇒⎟ ⎠
⎞⎜⎝
⎛ −=C
L j Z ω
ω 1
.1 Para ω = ω0 es Z1 = 0
En lo que hace a Z1 = f (ω) no hay dificultad en representarla.
Veremos ahora 4.Z2 = f (ω):
⎟ ⎠
⎞⎜⎝
⎛ −=⇒⎟ ⎠ ⎞⎜
⎝ ⎛ −
=
⎟ ⎠
⎞⎜⎝
⎛ −
⎟ ⎠ ⎞⎜
⎝ ⎛ −−
=C
L j Z C
L j
C L j
C L
Z ω
ω ω
ω
ω ω
ω ω
1.2.4
2
1
1.2
1
2
2
2
Calculemos 4.Z2 para ω = 0
C
j Z
ω
2.4 2 −= Para ω = 0 => 4.Z2 = -∞
Además existe un cero de 4.Z2 en ω’.
a)
Z2 Fig.12
L1/22C1 L1/22C1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 363/424
365
La banda de paso está limitada por ω1y ω2.
Las frecuencias ω’ y ω’’ constituyen ceros de transmisión o sea frecuencias de atenuación total,
si no consideramos la resistencia del circuito
De lo expresado anteriormente podemos ver que quedan delimitadas tres zonas. según los
valores de Z1/ 4Z2
Z1/4.Z2
Entre (-1) y 0 Zona I (banda de paso)
Negativa: Zona IIPositiva: Zona III Banda de atenuación
Banda de pasoFi .13
ω’ ω1
ω0
ω2ω’’
4Z2 Z1
ω
C L
C
L
C L
j Z
C L
C L j Z
ω ω
ω ω
ω ω
ω ω
1
.2.
1.
.2.4
1
1
.2.4
2222
2
2
2
−
⎥⎦
⎤⎢⎣
⎡−+
=∴
⎟ ⎠
⎞⎜⎝
⎛ −
⎟ ⎠
⎞
⎜⎝
⎛
−=
Para0ω ω = es ±∞=2.4 Z
Por ultimo podemos poner a
4Z2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 364/424
366
Clasificación de los Filtros mediante funciones Hiperbólicas
Es posible verificar las características de las tres zonas considerando una expresión de γ en
términos de función hiperbólicas.
Habíamos visto que:
2
1
.21cosh
Z
Z +=γ y que
2
1.2/1
2
1cosh
221 −+
=−
= Z Z
senh γ γ
2
1.42 Z
Z senh =∴ γ
[19]
Si Z1 y Z2 son ambos imaginarios puros, su relación y por lo tanto (Z1 / 4Z2) es un numero real.
Dado que Z1 y Z2 pueden tener cualquier valor entre – j ∞ y + j ∞ , Z1 /4Z2 puede tener
cualquier valor real entre estos mismos limites – ∞ y +∞ .
Entonces2
1
.42 Z
Z senh =
γ , tiene también limites infinitos, pero puede ser real o imaginario
según que Z1/ 4Z2 sea positivo o negativo.
Se demostrará que α y β adoptan distintos valores según el valor de Z1/ 4Z2. .
De la ec. [19] :
2
1.42
.2
cosh2
cos.2222 Z
Z sen j senh j senh senh =+=⎟ ⎠ ⎞⎜
⎝ ⎛ += β α β α β α γ [20]
Dividiremos en dos casos.
Caso A: Z1/ 4Z2 es negativo y por tanto es 21 .4/ Z Z imaginario.
Caso B: Z1/ 4Z2 es positivo y por tanto 21 .4/ Z Z es real.
Caso A: Z1/ 4Z2 es negativo, por lo tanto es 21 .4/ Z Z Imaginario
Llamando Z1/ 4Z2 = -x2 [21]
Luego jx Z
Z senh +==
2
1
.42
γ [22]
Luego en la ecuación [20] igualando las partes reales
0
2
cos.
2
= β α
senh [23]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 365/424
367
y las partes imaginarias:
x sen =2
.2
cosh β α
[24]
Estas dos ecuaciones deben ser satisfechas simultáneamente por α y β.
De aquí se desprende dentro del caso A, las zonasІ y
П, puesto que la Ec. [23] se satisface
indiferentemente con α = 0 ó con β = ± л
Zona І: -1 ≤ Z1/ 4Z2 ≤ 0
Si α = 0, la ecuación [23] queda satisfecha
Por otra parte 12
cosh =α
Entonces la ecuación [24] queda:
x sen =2
β [25]
Pero el seno puede tener un valor máximo de solo 1, luego ésta solución es válida únicamente
paro Z1/ 4.Z2 negativa y magnitud máxima, igual a la unidad.
Por tanto resumiendo.
Zona І => α = 0 y β = 2 arc.sen x = 2arc. Sen.2
1
.4 Z
Z
y 0.4/1 21 ≤≤− Z Z ó 1101 2 ≤≤−⇒≤−≤− x x
Zona П: α ≠ 0 , entonces β = ±π.
Como vimos anteriormente la segunda posible solución de la ecuación [23] es para β = ±π.
Para este caso es sen 12/ ±= β y la Ec. [24] da :
⇒±=± x2cosh α
x=2coshα
[26]
Dado que 12
cosh ≥α
, esta solución es valida para Z1/ 4Z2 negativa y con una magnitud mayor
o igual que la unidad y puede resumirse así:
Zona П => α ≠ 0; β = ±π;2
1.4
cosh.2 Z
Z arc=α
1.4/ 21 −≤≤∞− Z Z ó 12 −≤≤∞− x

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 366/424
368
Caso B: Z1/ 4Z2 positivo2
1
.4 Z
Z ∴ real = ± x
Introduciendo este valor en la ecuación [20] e igualando las partes reales
x senh ±=2cos.2
β α [27]
Y las partes imaginarias
02
.2
cosh = β α
sen [28]
Una vez más α y β, deben satisfacer simultáneamente ambas ecuaciones.
Dado que 12
cosh ≥α
para cualquier valor real de α, la ecuación [28] puede ser satisfecha
solamente para β/2 = 0; ± π ó β = 0 (obsérvese que no hay diferencia física entre β = 0 y
β = 2 π)
Luego cos β/2 = ± 1 y la ecuación [27] se reduce a:
x senh =2
α [29]
Por consideraciones físicas, α sólo puede ser positivo.
Resumiendo:
Zona Ш:2
1
.4 Z
Z = real; β = 0
∞≤≤2
1
.40
Z
Z y
2
1
.4..2
Z
Z senharc=α
Representando las dos condiciones
Fig.14
II
II∞−
IBanda de paso
I
B.P-1 0
III
Z1/4.Z2 eje real
x eje imaginarioII
-1 0 +1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 367/424
369
Como se ve, los tres límites de las Zonas І, П y Ш son mutuamente exclusivos y que, por lo
tanto, una ves conocido el valor de Z1/4.Z2, , es posible determinar inmediatamente a que caso
corresponde el filtro.
Como Z1 y Z2 se hacen con reactancias o combinaciones de reactancias de distintos tipos,
entonces al variar la frecuencia, el filtro pasa de una zona a otra.La Zona І corresponde a la banda de transmisión, mientras que, las Zonas П y Ш indican banda
de atenuación
Resumiendo hacemos la tabla siguiente:
Zona2
1
.4 Z
Z α β Carácter de Z0 Banda
I -1 a 0 02
1
.4..2
Z
Z senarc Resistencia
puraPasante
II ∞− a -12
1
.4cosh..2
Z
Z arc π ±
Reactancia pura
Detenida
III 0 a + ∞ 2
1
.4
..2 Z
Z senharc 0
Reactancia
pura
Detenida

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 368/424
370
Filtros de k constante
Dicese que una red en escalera es del tipo de k constante, cuando las impedancias Z1 y Z2 son
inversas, es decir si:
K R Z Z == 221. [30]
Esta ecuación establece que Z1 y Z2 son inversas si su producto es una constante, independiente
de la frecuencia.
En los filtros de este tipo la zona Ш no existe ya que X1 y X2 deben ser de distintos signos para
que su producto de una constante, o lo que es lo, mismo jX Z Z ±=21 .4/ es imaginario, y en
la zona Ш este valor es real.-
Veremos como ejemplo dos combinaciones particulares de estructuras inversas.
Si 11 . L j Z = y2
2 .1C j
Z ω
= se tiene que: 2
2
121. R
C
L Z Z == [30’]
independientemente de la frecuencia.
Luego, una reactancia inductiva y una reactancia capacitiva, son impedancias inversas.
Por otra parte, si Z1 = j( ωL1 - 1 / ωC 1), es un circuito resonante serie sin pérdidas y
)/1(
1
222
LC j Z
ω ω −=
un circuito antirresonante sin perdidas, se tiene:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−=
−−
=1
1
/1
/1.
222
112
1
2
22
1121
C L
C L
C
L
LC
C L Z Z
ω
ω
ω ω
ω ω
Como vemos el producto de Z1.Z2 puede hacerse independiente de la frecuencia si
L1.C 2 = L2.C2.
Por lo tanto, un circuito resonante en serie y un circuito resonante paralelo, son inversos siempre
que la frecuencia de resonancia de una coincida con la del otro y siL2 /C 1 = L1 / C2 = R 2
La relación definitoria del filtro de K constante, o sea la Ec. [30], puede combinarse con los
resultados del último apartado para obtener curvas universales que expresan α y β para este tipo
de filtro.
Luego de la ecuación [30]:
2
21
2
1
.4.4
R
Z
Z
Z =

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 369/424
371
ó jx R
X j
R
Z
Z
Z ±=±=±=
.2.2.411
2
1 [31]
Donde x puede ser identificado con el parámetro x de las zonas І y П de lo visto anteriormente.
Pueden usarse entonces los valores de la tabla anterior para dibujar las curvas universales de la
fig.15
La cantidad R de las ecuaciones [30] y [31] tiene un significado especial, que se advierte al
considerar la impedancia característica del circuito T. (ver apéndice 2)
Recordando que:
2
121
21
210 .41..
4.
Z
Z Z Z
Z Z Z Z T +=+=
Introduciendo la definición de K constante
2
10 .4
1. Z
Z R Z T += [32]
Luego R resulta ser el valor de Z0T para la frecuencia para la cual es Z1 = 0 y se la conoce
como impedancia nominal de la red.
Se toma la constante R, igual al nivel de impedancia de carga del filtro, siendo las resistencias
terminales de los filtros K aproximadamente iguales a R ohms.-
Estas curvas universales y el concepto de impedancia nominal son útiles para el proyecto de loscuatro tipos de filtros escalera de K constante.
1 2 3-3 -2 -1
x eje imag.
-1
-3
-4
1
2
3
4
-2
π α
β
Zona II Zona I. Zona III
x senarc..2= β
xarc cosh..2=α
Fig. 15. Curvas universales de α y β para los filtros de K constante
-
∝ ne per
β rad
α

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 370/424
372
Apéndice П
Impedancias características de los filtros de k c t e
Circuito T simétrico tipo
Luego ⎟ ⎠
⎞⎜⎝
⎛ += 212 Z
Z Z ecc y
21
21
1
2
.2
2 Z
Z
Z Z
Z Z ecc
+
⎟ ⎠
⎞⎜⎝
⎛
+=
⎟ ⎠
⎞⎜⎝
⎛ ++=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+
⎟ ⎠
⎞⎜⎝
⎛
+⎟ ⎠
⎞⎜⎝
⎛ +=∴ 2
12
112
21
21
12
10 .
2.
242
.2
2.
2 Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z T
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ +=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ ++=+=∴
2
121
2
121
21
210
4
1..
4
1.
4
. Z
Z Z Z
Z
Z Z Z
Z Z Z Z T
Finalmente: 20 1. x R Z T −= [1]
Circuito π simétrico tipo
).4.(
..4
).4(
..4
)2.2(
..2.
).4(
).2).(.2(
211
21
22
21
122
21
12
21
2120
Z Z Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z Z Z
+=
+=
++
+=∴ π
Z1
2Z22Z2
Z1/2
Z2
Z1/2Recordando la definición de impedancias
características
eccecaT Z Z Z .0 =
12
12
21
212
.2
..2
.4
)2).(.2(
Z Z
Z Z Z
Z Z
Z Z Z Z
ecc
eca
+=
++
=

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 371/424
373
4/.
.
.4
.
).4.(4
.
2121
210
21
21
21
22
211
21
22
0 Z Z Z
Z Z Z
Z Z Z
Z Z
Z Z Z
Z Z Z
+=⇒
+
=+
=∴ π π
4/.21210 Z Z Z Z T +=
).4/1(..
.
).4/1.(.
..
2121
21
2121
210
0
210
Z Z Z Z
Z Z
Z Z Z Z
Z Z Z
Z
Z Z Z
T +=
+=⇒=∴ π π
Finalmente
20
1 x
R Z
−
=π [2] ∴ 212
00 .. Z Z R Z Z T ==π
Representación gráfica de Z0T y Z0π
Habíamos visto que la zona І o banda pasante estaba delimitada por los valores de x
comprendidos entre -1 y +1.
Nosotros haremos la representación para x variando de 0 a 1.
Para ello representamos la Ecs. [1] y [2] entonces para 0 ≤ |x| ≤ 1
En la banda elimina banda, para la cual |x| > 1 , tanto Z0T como Z0π se tornan imaginarios.
Es evidente que una sección de esta clase no puede quedar correctamente cargada dentro de toda
la banda cuando el receptor es una simple resistencia.
Si se ajusta la carga para las frecuencias bajas, se producirán fuertes reflexiones en las
frecuencias altas y viceversa, si la carga se ajusta para las frecuencias altas.
En estas condiciones, la pérdida de transmisión no es igual ala perdida de atenuación.
Z0π
Z0T
Z0=R
R
x
0 1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 372/424
374
Es por lo tanto deseable buscar una sección de filtro que ofrezca una menor variación de Z0
dentro de la banda pasante, cosa que se hará mas adelante con los filtro m derivados.
Gráficos de atenuación de filtros ideales:
Los gráficos de la atenuación α en función de la frecuencia de los diferentes tipos de filtros
ideales y perfectos, son como los de la fig.16.
Filtro pasa bajo de K constante elemental:
Por definición un filtro L.P. es uno que deja pasar sin atenuación todos las frecuencias inferiores
a la frecuencia de corte fc y atenúa todas las frecuencias superiores a fc.
La curva de α en función de la frecuencia de un filtro ideal perfecto, seria como el de la fig.16 a
Los filtros de K constante sólo se aproximan a esta curva ideal y se diseñan a partir de las Curvas
Universales de α.
En la fig 15 adviértase que el rango de x correspondiente a una sección L.P, es el que va de
0 a +∞ .
De acuerdo a la ecuación [31], existe una relación directa entre la impedancia Z1 y el parámetro
x de las Curvas, por lo que primero determinamos la X1 y luego por reciprocidad a X2
El problema consiste, entonces, en elegir las componentes de X1 de tal modo que cuando f varíe
de 0 a + ∞ , X1 ( y por tanto x) lo haga de 0 a + ∞ .
X1 debe proveer, por lo tanto, una proporcionalidad directa entre x y la frecuencia.
De acuerdo a la ecuación [31] x j R
X j .
.21 ±=± vemos que x es directamente proporcional a X1.
Por lo tanto si damos a X1 el carácter de una reactancia inductiva, obtendremos dicha
Fig.16 a) Pasa bajo b) Pasa alto c) Pasa banda d) Elimina banda
fc fc f 1 f 2 f 1 f 2
f f f f
∞ ∞ ∞ ∞
α α α α

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 373/424
375
proporcionalidad directa entre x y la frecuencia, por reciprocidad la X2 será un reactancia
capacitiva.
Por lo tanto el circuito T, será el de la figura.
2
..
4
.. 21)(
212
2 C L x
C L x
ω ω ω =⇒−=−∴ [33’]
Llamamos frecuencia de corte ωc a la que hace x(ω) = 1
Luego introduciendo en la Ec. [33’]
2
..1 21
C Lc
ω
= ∴ 21 .
2
C LC =ω [34]
Por consiguiente de la ecuación [33], será:
21
)(
.
2
C L
x ω = y de [34] =>C
xω
ω =)( [35]
Recordando de la tabla el valor de α y β para la zona І y П
C senarc β /...2= [36]
C arcα /.cosh..2= [37]
Dando valores a ω / ωc, se obtiene las atenuaciones
Fig.17
L1/2 L1/2
C2
2
2
1
2121
1.. R
C
L
C j L jCte Z Z ====
ω ω
4
..
4
..
.421
221
22
2
12)(
C LC L j
Z
Z x
ω ω ω
−===∴
[33]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 374/424
376
Las Ecs. [36] y [37], nos dicen que las características de atenuación y de fase no dependen de la
frecuencia de corte ωc ni de R.
O sea que si la atenuación fuera insuficiente, habría que agregar más secciones en cascadas.
La sección π tiene las mismas características de α y β.
Lo que cambia es la impedancia característica, que tiene un mínimo para ω = 0 y aumenta
cuando ω→ωc (ver apéndice П)
Hasta ahora hemos hecho el desarrollo en base a expresiones tales como cosh γ = A, que
suponen al circuito cargado con su Z0.
Sin embargo Z0 es variable con ω.
Por ello se elige como su resistencia de carga verdadera, un valor del 75 % de la R nominal, que
produce una desadaptacion mínima en ambos extremos de la banda de paso.
ω/ωc α (db)
1,01 2,51,10 7,7
1,50 16,72,00 23
Fig.18
R
π α β β
α
Z0T
ω/ωc
ω/ωc
Inductivo
1
1

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 375/424
377
Proyecto de un filtro pasa bajo de K - c t e
Elegimos primeramente la sección tipo, por ejemplo la sección T del punto anterior.
Aplicando las expresiones [33] y [34]
[33] 2
2
1 RC
L= y
21.
2
C LC =ω [34]
De [33] 22
1 .C R L =⇒ y de [34]2
12
.
4
C LC
ω =
y reemplazando C2 en la anterior
C C C
R L
R L
L
R L
ω ω ω
.2.4
.
.412
2
12
21
2
1 =⇒=⇒= [36]
Y reemplazando L1 en la expresión de C2
⇒=2
2.
.24
c
C
RC
ω ω
C R
C ω .
22 = [37]
Por último, la mayor de las frecuencias para los que se fija α, nos da el número de secciones
necesarias.
Fig.19
α1
α2
ω1 ω2fc
Para realizarse el proyecto debemos tenercomo datos:
a) La resistencia de carga R b) La frecuencia de corte ωc
c) Uno o dos datos de α paraCiertas frecuencias
α

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 376/424
378
Ejemplo: Calcular el filtro anterior para R = 600 Ω y ωc = 1000 rad / seg
De [36] Hy L L 2,12,11000
1200
1000
600.211 =⇒===⇒
De [37] F xC C 62
552 103,310.
6
2
10.6
2
1000.600
2 −− =∴===
Luego el circuito del filtro para la sección T sería el de la fig 20 y para una sección π equivalente
sería el de la fig 21
3,3 μ F
Fig.20
0,6 Hy 0,6 Hy
Fig.21
1,65 μ F 1,65 μ F
1,2 Hy

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 377/424
379
Filtro pasa alto de K constante
Por definición un filtro pasa altos (H. P.), es uno que atenúa todas las frecuencias inferiores a una
frecuencia de corte f c y deja pasar sin atenuación todas las frecuencias superiores a f c..
La característica de atenuación ideal del filtro (H. P.) es la de la fig. 16 – b).
Los filtros de K constante sólo se aproximan a ésta curva ideal y se diseñan de manera análoga a
la de los filtros (L. P.)
En la fig 15, advertimos que el rango de x correspondiente a sección H.P. es el que va
de – ∞ a 0.
El problema consiste entonces, en elegir las componentes de X1 de tal modo que cuando f varíe
de 0 a + ∞ , X1 (y por lo tanto x) lo haga de – ∞ a 0.
X1 debe proveer, por lo tanto una proporcionalidad inversa entre x y la frecuencia.
De acuerdo a la ecuación [31], x j R
X j .
.21 ±=±
Vemos que x es directamente proporcional a X1.
Por lo tanto si damos a X1 el carácter de una reactancia capacitiva obtendremos dicha
proporcionalidad inversa entre x y la frecuencia.
Según la fig 15 el corte ocurre para x = -1.
Luego sustituyendo en la ecuación [31] para la condición de corte:
1)..2(.2 11....2 1.1.111
1 =⇒−=−∴−=− C f R j
C R j
C j jX
ccc π ω ω
De dondec f R
C ...4
11
π = [38]
La correspondiente ecuación de diseño para Z2 , resulta de las ecuaciones [30] y [30’].
Luego, para que Z1 y Z2 sean inversas:
21
1
22
1
222 .
./1.. RC j
C j
R L j Z
R L j Z ω ω
ω ω ==⇒== 12
2 .C R L =⇒ [39]
Reemplazando en [39] el valor de C1 hallado en [38] nos queda:
c f
R L
..42π
= [40]
Puede demostrarse una vez más, que x es una frecuencia normalizada puesto que, sustituyendo
X1 en la Ec. [31]:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 378/424
380
1...2
1
C R x
ω −= y reemplazando C1 por la ecuación [38]
f
fc x
f
f f R
f R x c
c −=⇒−=−= ...4.)..2.(.2
1π
π [41]
Recordando las expresiones de α y β para las zonas І y П:
Zona II: f
f arc ccosh..2=⇒ α pero xh
xarc
11 sec1
cosh1
cosh −− == Ver pág.30 Schaum
c f
f harc sec..2=α
y π β −= para f < f c
Zona I: 0=⇒ α
y f
f senarc c..2−= β ó
c f
f arc csc..2−= β para f > f c Ver pág.18 Schaum
La expresión de la frecuencia de corte se obtiene combinando las Ecs. [40] y [38], de donde:
12 ...4
1
C L f c
π = [42]
La Fig. 22 a y b muestran dos filtros pasa alto con su estructura en T y π respectivamente y la
Fig. 22 c, muestra las curvas de repuestas o sea la atenuación α y su rotación de fase β.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 379/424
381
Ejemplo: Calcular el filtro pasa alto anterior para una resistencia de carga R = 600Ω y
frecuencia de corte ωc = 1000 rad /seg.
De [38] F xC 61 1083,0
200000.1
1
600.1000.2
1 −=== F C 83,01 =∴
De [39] ( ) Hy L 3,0600.10.83,0 262 ==⇒ − Hy L 3,02 =∴
Las estructuras T y π resultantes son los de la Fig. 23 a y b respectivamente
Fig. 23- a
0,3 H y
1,66μ F
Fig.23- b
0,6Hy0,6 Hy
1,66μ F 0,83 F
a Circuito T.
L2
2C1
b) Circuito π
2L2
2C1
C1
2L2
Fig. 22 – filtros pasa alto de K constantec)
0
-π
α
f/fc
c f
f h 1sec2 −=α
c f
f 1csc2 −= β
fc

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 380/424
382
Filtro pasa banda de K constante
Un filtro pasa banda (B.P.), es uno que atenúa todas las frecuencias inferiores a una frecuencia
de corte inferior f 1 y todas las frecuencias superiores a una frecuencia de corte superior f 2.
Las frecuencias comprendidas entre f 1 y f 2 constituyen la banda pasante, que se transmite sin
atenuación.
La Fig. 16 – c muestra la característica ideal de atenuación del filtro B.P.
Para diseñar un filtro B.P. de K constante, se elige Z1 como un circuito resonante en serie, sin
pérdidas, es decir X1 = ω.L1-1/ ω.C1.
Así mientras la frecuencia varia de 0 a +∞, x lo hace de – ∞ a +∞ según lo indica la Ec.
[31].
El filtro B.P incluye asi todo el rango de variación de x en la Fig. 15.
La frecuencia inferior de corte f 1, corresponde a x = - 1 y la frecuencia superior de cortecorresponde a x = +1.
Estas observaciones se aprovechan para el diseño del filtro B.P.
De la [31] R
X x
.21=⇒
Sustituyendo la condición de corte superior en ésta, para ω2 :
1.2 ./1. 1212 =−= RC L x [43]
De modo similar para ω1:
1.2
./1. 1111 −=−
= R
C L x [44]
De las dos últimas ecuaciones simultáneas, puede despejarse L1 y C1 (ver apéndice III) lo que da.
).( 121 f f
R
L −= π [45] y 21
121 ....4 f f R
f f
C π
−= [46]
Ya se sabe que el elemento en paralelo inverso Z2 , será un circuito antirresonante con L2 y C2
en paralelo.
Por otra parte, para que Z1 y Z2 sean estructura inversas. (Ver Pág. 25)
2
2
1
1
2 RC
L
C
L== [47]
2211. C LC L = [48]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 381/424
383
Despejando L2 y C2 :
De [48] 12
12 .C
C
L L =⇒ y de [47] es 2
2
1 RC
L=
12
2 .C R L =∴ y de [47] es 212 R
LC =
Remplazando en estas ultimas las Ecs. [45] y [46]
21
122 ...4
).(
f f
f f R L
π
−= [49]
).(.
1
12
2 f f R
C
−
=π
[50]
La Ec. [48] establece que la frecuencia de resonancia Z1 debe ser igual ala frecuencia de
antirresonancia de Z2, para que las dos impedancias sean inversas, es decir:
2211
2 11
C LC Lr ==ω [51]
Introduciendo los valores de los cuatros elementos de circuito se obtiene:
21
2
. f f f r = [52]
Lo que indica que la repuesta del filtro B.P., es posiblemente de simetría geométrica, respecto de
la frecuencia de resonancia f r .
Esto se verifica reduciendo a x, en términos de una frecuencia normalizada.
Por la Ec. [31]
1
112
111
...2
1..
.2
/1.
.2 C R
C L
R
C L
R
X x
ω
ω ω ω −=
−== [53]
Introduciendo la Ec. [52] y remplazando L1 por la [45] y C1 por la [46]
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
−=
f
f
f
f
f f
f x r
r
r .12
[54]
Según las Zonas I y II, la repuesta del filtro B.P esta dado por:
Zona I 0=⇒ α ;
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ −
−=
f
f
f
f
f f
f senarc r
r
r
12
...2 β para f 1 ≤ f ≤ f 2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 382/424
384
⎪⎪
⎩
⎪⎪
⎨
⎧
>+=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
−=
<−=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
−=
212
112
..;.cosh..2
..;.cosh..2
.
f f para f
f
f
f
f f
f arc
f f para f
f
f
f
f f
f arc
II Zona
r
r
r
r
r
r
π β α
π β α
Se puede verificar (ver apéndice III) que las expresiones de las frecuencias de corte, en términos
de los elementos de circuito son:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ++−=
1121211 .
1
.
1
.
1
.2
1
C LC LC L f
π [55] a
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
++= 1121212 .
1
.
1
.
1
.2
1
C LC LC L f π [55] b
La fig 24 muestra el filtro B.P. de K constante y sus curvas de repuesta.
L2 C2
Circuito T
L1/2 2C1
C2/2
f
Fig. 24-Filtro pasa banda de K constante.
Circuito π
L1 C1
L1/22C1
C2/2 2L2 2L2 0
α
-π
π
α
β
α β
f 1 f 2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 383/424
385
Ejemplo: Calcular un filtro pasa banda de K constante que tenga una banda pasante comprendida
entre ω1= 2000 y ω2= 3000 rad/seg y trabaje sobre una resistencia de carga de 600 ohm
De la [45] y H L R
f f
R L 2.12,1
20003000
600.2.2
).( 11212
1 =⇒=−
=−
=−
=ω ω π
De la [46]
F C R f f R
f f C μ
ω ω π 139,010.139,0
3000.2000.600.2
20003000
...2....4 16
21
12
21
121 =⇒=
−=
−=
−= −
De la [49] Hy L R
f f
f f R L 05,005,0
3000.2000.2
)20003000.(600
..2
).(
...4
).(2
21
12
21
122 =⇒
−=
−=
−=
ω ω π
De la [50]
F C R f f R
C μ ω ω π
33,310.33,3600).20003000(
2
).(
2
).(.
12
6
12122 =⇒
−=
−=
−= −
En la Fig. 25. pueden verse las dos estructuras de filtros pasa banda
0,05 Hy
Fig. 25-a Circuito T
0,6 Hy 0,278 F
Fig. 25-b Circuito π
0,2 Hy0,6 Hy
0,1 Hy0,1 Hy3,33 F
0,278 F
1,66 F
0,139 F
1,66μ F

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 384/424
386
Apéndice III
A) Cálculo de L1 y C1. Ecs. [45] y [46]
De [44] 1.2
./1. 1111 −=−
R
C L ω ω => 11
111111..2
.
1.2
..
1 L R
C R
LC ω
ω ω ω +=∴=
−
2
1211
121
211
1
...2
.
1...2
1
ω
ω ω
ω ω ω
L R
C L R
C
+=⇒+=∴ [1]
De [43]
RC L R
C L.2./1.1
.2
./1.1212
1212 =−⇒=−
ω ω Remplazando por [1] nos queda.
212111222
1
2
1112 ..2...2..2...2. ω ω ω ω ω
ω ω ω R L R L R L R L =−−⇒=+−
).(.2)( 1221
221 ω ω ω ω +=−∴ R L
⇒−
=+−
+=
−
+=∴
).(.2
.2
)).((
)(..2
)(
)(.2
121212
1221
22
121
f f
R R R L
π ω ω ω ω ω ω
).( 121
f f
R L
−=π
[45]
De [1]
).(...4..4
1
...2
1
...21
12
2
1
2
1
12
111
12
111
f f
R f f L R
C
L RC
−+
=+
=
⇒+=
π π π ω ω
ω ω
21
2121
121
...4...4....4
)(
f R f R f f R
f f C
π π π +−
−=
⇒ 21
121 ...4
)(
f f R
f f C
π
−= [46]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 385/424
387
B) Cálculo de f 1 y f 2. Ecs (55) a y b.
De la [44]
11112
12
11
11211111 ....41....4.2
.
1..1
.2
./1. 1 C R f C L f R
C
C L
R
C L x π π
ω
ω ω ω −=−⇒=
−⇒−=
−=
2
11111
21
2 .01....4....4C
L R peroC R f C L f ==−+ π π De la Ec. [47]
0...4
1
.01...4....4
1121
1
2
1
2111
2
12111
2 =−+⇒=−+∴C L
f L
C
L
f f C C
L f C L
π π π π
112
212
211
2121
21
21
...4
1
...4
1
...2
10
...4
1.
..
1
C LC LC L f
C L f
C L f
π π π π π ++−=∴=−+
⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++−=∴
1121211 .
1
.
1
.
1
.2
1
C LC LC L f
π [55] a
Para el cálculo de f 2 se parte de la Ec. [43]
1.2
./1. 1212 =−
= R
C L x
Y se procede de la misma forma que para f 1.
⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++−=∴
1121212 .
1
.
1
.
1
.2
1
C LC LC L f
π Ec. [55] b

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 386/424
388
Analogía entre pasa bajo y pasa banda
El diseño de las tres secciones básicas de filtros, se ha basado en las curvas universales de la
Fig. 15.
Por ejemplo para la red. L.P., se eligió Z1 de modo que la gama de las frecuencias reales
correspondiese a 0 ≤ x ≤ +∞, mientras que para la red B.P., la impedancia Z1 se eligió de
modo que la gama de la frecuencia reales correspondiese a – ∞≤ x ≤ +∞
Esto sugiere una estrecha analogía entre los casos L.P. y B.P.
En efecto, dada las ecuaciones de diseño de la red L.P., es posible derivar de ella la del caso B.P.
mediante una adecuada sustitución de variables.
Se observan las siguientes cantidades, correspondientes en los dos filtros.
L1 de la sección L.P., es remplazada en la sección B.P. por L1 y C1 en serie, siendo
ωr 2 = ω1. ω2 = 1/ L1.C1
C2 de la sección L.P., es remplazado en la sección B.P. por L2 y C2 en paralelo, siendo
ωr 2 = ω1. ω2 = 1/ L2.C2.
El ancho de banda que es igual a f c en el caso L.P., se hace igual al ancho de banda f 2 – f 1
en el caso B.P., con 21. f f f r = .
La Fig. 26 muestra un ejemplo de esta analogía.
La 26-a muestra un filtro L.P. diseñado para R = 600 Ω y f C = 3000 c/s.
La 26-b corresponde al filtro B.P. análogo con R = 600 Ω y f 1 = 1000 c/s y f 2 = 4000c/s
observando que L1 y C2 son idénticos para los dos diseños.
Fig. 26-a (L.P)
31,8 mHy
Fig. 26-b (B.P)
31,8 mHy
0,177μ F
0,199 F 31,8 mHy
35,7 mHy 0,177 F
31,8 mHy0,199 F

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 387/424
389
Filtro elimina banda de K constante
De acuerdo a las curvas universales de la Fig. 15, vemos que para diseñar un filtro elimina banda
(E.B.) debemos elegir Z1 de tal modo que cuando la frecuencia varia de 0 a f 1, x lo haga de
0 a + ∞ y cuando f varíe desde f 1 a +∞ , x lo haga desde -∞ a 0.
De acuerdo a esto, se elige a Z1 como un circuito resonante paralelo sin pérdidas es decir
X1 = j. ωL/1- ω 2LC , cuya gráfica en función de la frecuencia se representa en la Fig. 27.
Así mientras la frecuencia varía de 0 a +∞, X1 y por lo tanto x (por la Ec. [31]), lo hace desde
0 a +∞ para la frecuencia de corte inferior y de -∞ a 0 para la frecuencia de corte superior
que es lo que estábamos buscando.
El filtro E.B. incluye así todo el rango de variación de x en la Fig. 15, la frecuencia inferior de
corte f 1 corresponde a x = 1 y la frecuencia superior de corte corresponde a x = -1.
Sustituyendo la condición de corte inferior en la Ec. [31] para ω1:
1.2
..1/. 12111 =
−=
R
C L L x
ω ω [56]
De modo similar, para la frecuencia superior ω2
1.2
..1/. 122212 −=
−=
R
C L L x
ω ω [57]
De las dos últimas ecuaciones simultáneas, puede despejarse L1 y C1 (ver apéndice VI), lo que
da:
12
121 .
).(.2ω ω
ω ω −= R L [58] y
).(.21
121
ω ω −=
RC [59]
Fig.27- Reactancia Z1 de un circuito L-C paralelo
B,P B,P
ω1 ωL ω1 ωL
Z1
ω0
+∞
-∞
ω0
ω B,P B,P

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 388/424
390
Ya se sabe que el elemento en paralelo inverso Z2, será un circuito resonante serie con L2 y C2.
Por otra parte para que Z1 y Z2 sean estructura inversa (ver Pág. 20)
2
2
1
1
2 RC
L
C
L== [60]
2211 .. C LC L = [61]
Despejando L2 y C2
De la [61] 12
12 .C
C
L L = y de [60] 2
2
1 RC
L=
12
2 .C R L =∴ y de [60] es21
2
R
LC =
Reemplazando en estas últimas las Ecs. [58] y [59]
).(2 122
ω ω −=
R L [62]
21
122 ..
).(2
ω ω
ω ω
RC
−= [63]
La ec. [61] establece que la frecuencia de resonancia de Z1 debe ser igual ala frecuencia de
antirresonancia de Z2 para que las dos impedancias sean inversas, es decir:
2211
2
.
1
.
1
C LC Lr ==ω [64]
Introduciendo los valores de los cuatros elementos de circuitos se obtiene.
212 . f f f r = [65]
Lo que indica que la repuesta del filtro E.B. es posiblemente de simetría geométrica respecto de
la frecuencia de resonancia f r .
Esto se verifica reduciendo x en términos de una frecuencia normalizada.
Por la Ec. [31]:
)..1.(.2
.
.2
..1/.
.2 112111
211
C L R
L
R
C L L
R
X x
ω
ω ω ω
−=
−== [66]
Introduciendo la Ec. [65] y reemplazando L1 por la Ec. [58] y C1 por la Ec. [59] nos da:

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 389/424
391
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−
−=
r
r r
f
f
f
f f
f f x
1.12 [67]
Según las zonas I y II, la repuesta del filtro E.B. esta dada por:
Zona I:
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−
−==
r
r r
f
f
f
f f
f f senarc
1....2;0 12 β α Para f 2 ≤ f ≤ f 1
Zona II: π β α +=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−
−= ;
1..cosh..2 12
r
r r
f
f
f
f f
f f arc Para f ≥ f 1
π β α −=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−
−= ;
1..cosh..2 12
r
r r
f
f
f
f f
f f arc Para f < f 1
Se puede verificar (ver apéndice IV), que las expresiones de las frecuencias de corte en términos
de los elementos de circuito son:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ++−=
1112211 .
1
.
1
.
1
.2
1
C LC LC L f
π [68]
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++=
1112122 .
1
.
1
.
1
.2
1
C LC LC L f
π [69]
En la Fig.28 se muestra el filtro elimina banda de K constante en su circuito T y π y sus curvasde respuestas.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 390/424
392
L2
C2
Fig. 28-a Circuito T
L1/2
2C1
f
Fig. 28
Fig.28-b Circuito π
L1/2
2C1
C2/2
2L2 2L2
α α
β
C1
L1
C2/2
f 1 f 2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 391/424
393
Apéndice IV
A) Cálculo de L1 y C1, Ecs. [58] y [59]
De [56]
1.2
..1/. 112111 =
− R
C L L ω ω => 1111
2111
2111 .2....2...2.2. L RC L RC L R R L ω ω ω ω −=∴−=
R L
L RC
.2..
..2
121
111
ω
−=∴ (1)
De [57] => RC L R L R
C L L.2....2.1
.2
..1/.11
2212
112211 ω ω
ω ω +−=⇒−=
−
RC L R L .2....2. 112212 ω ω +−=
Remplazando C1 de (1) nos queda:
21
1122
22
21
121
111
2212
....2..2
.2..
)..2.(.2...2.
ω
ω ω ω ω
ω
ω ω ω
L R R
R L
L R R L R L
−+−=
−+−=
)(2........2..2.. 2211
2212
2111
22
22
2112
21
12ω ω ω ω ω ω ω ω ω ω ω ω −=+⇒−+−= R L L L R R L
)).(.(.2).(.. 121221121 ω ω ω ω ω ω ω ω −+=+ R L
⇒ 21
121 .
)(.2
ω ω
ω ω −=/ R
L [58]
Reemplazando L1 en (1)
=−
+−=
−
−−
=−
−−
=).(..4
..2..2..2
).(..4
).(.2..2
.
).(.2..2
.
).(.2..2
1212
122
2
1212
2
122
21
1221
21
121
1ω ω ω
ω ω ω
ω
ω ω ω
ω
ω ω
ω ω ω
ω ω
R
R R R
R
R R
R R
R R
C
⇒−
=).(..4
..2
1212
11
ω ω ω
ω
R
RC
).(.2
1
12
11
ω ω −=
RC [59]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 392/424
394
B) CÁlculo de las frecuencias de cortes f 1 y f 2. Ecs. [68] y [69]
De la [56]
⇒−=⇒−=−
112111
112111 ....2.2.1
.2
..1/.C L R R L
R
C L Lω ω
ω ω
0.2...2. 111121 =−+ R LC L R ω ω
⇒=−+ 02.2...2..4 112
1112 R f L f C L R π π
0...2..4
.2.
...2..4
..2
1121
112
121 =−+
C L R
R f
C L R
L f
π π
π
0...4
1.
...4
1
1121
1
21 =−+∴
C L f
C R f
π π Recordando la Ec. [60]
1
2
C
L R =
0...4
1.
...4
10
...4
1.
...4
1
1121
12
21
1121
11
2
21 =−+⇒=−+∴
C L f
C L f
C L f
C C
L f
π π π π
De la raíz positiva de esta ecuación se desprende el valor de f 1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ++−=
1112121 .
1
.
1
.
1.
.2
1
C LC LC L f
π Que nos da la Ec. [68]
Haciendo el mismo procedimiento a partir de Ec. [57] obtenemos:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ++=
1112122 .
1
.
1
.
1.
.2
1
C LC LC L f
π Que nos da la Ec. [69]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 393/424
395
Análisis de los efectos disipativos en los filtros.
Si el filtro pasa bajo del ejemplo visto utilizase bobina de Q = 20 y suponiendo que se
mantuviese constante este valor para todo el intervalo útil de frecuencia, compárense las
funciones de atenuación y fase con la de una red ideal (Q =∞) y luego con el caso de una bobina
de Q = 200.
Los resultados obtenidos se hallan representadas gráficamente y tabulado en la Fig. 29 y han sido
extraído del libro “líneas de transmisión y filtro eléctricos” de KARKASH, pág.243.
A la vista de estos, se observa que para Q = 20, los efectos de la resistencia de la bobina son
despreciables, salvo en las regiones en la inmediata proximidad del corte.
En particular, la función de fase β se ve que tiende a su límite de π radianes en forma menos
bruscas que lo haría en el caso ideal (Q =∞), alcanzando dicho valor en la proximidad de
ω = 2.ωc en lugar de ω = ωc.
También se observa que para Q = 20, la componente imaginaria de Z1/4.Z2 es menor que el 5 %
del módulo de dicha expresión dentro de la banda pasante, por lo que serán muy pequeños los
errores que se introduzcan al sustituir la función:
ν μ j Z
Z +=
2
1
.4 por su parte real
La disipación parásita o incidental en las redes selectivas en general, y en los filtros en particular,
puede en ciertos casos, tener mucha importancia aun cuando se hayan despreciado los efectos de
la disipación en el estudio preliminar de los filtros que se ha realizado.
Como puede observarse de los resultados de la Fig. 29, los efectos de la disipación sobre α
introduciendo una atenuación pequeña, pero variable, en la banda pasante del filtro cuyos efectos
se acentúan en las proximidades del punto de corte.
MAYER demostró que la atenuación en la banda pasante, debido a las componentes disipativas
de la red, es proporcional a la derivada de la función de fase ( ω β d d / ), por lo que los filtros que
poseen característica de fase lineal en la banda pasante, tendrán en dicha banda pasante una
atenuación plana.
Estas condiciones son importantísimas, ya que implica que las frecuencias de la señal están
exentas, de los efectos de distorsión de amplitud y retrasos.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 394/424
396
Z1/4.Z2 Atenuación α ( neper ) Rotación de fase β (radian )
Ideal Caso disipativo Ideal Caso disipativo Ideal Caso disipativoC ω
ω
Q =∞ Q = 200 Q = 20 Q =∞ Q = 200 Q = 20 Q =∞ Q = 200 Q =20
0 0 0 0 0 0 0 0 0 00,2 -0,04 -0,04 + j0,0002 -0,04 + j0,002 0 0 0,01 0, 4 0,4 0,4
0,4 -0,16 -0,16 + j0,0008 -0,16 + j0,008 0 0,01 0,02 0,79 0,79 0,79
0,6 -0,36 -0,36 + j0,0018 -0,36 + j0,018 0 0,01 0,04 1,27 1,27 1,26
0,8 -0,64 -0,64 + j0,0032 -0,64 + j0,032 0 0,02 0,07 1,88 1,88 1,88
1 -1,00 -1,00 + j0,005 -1,00 + j0,05 0 0,03 0,32 3,14 3,08 2,80
1,2 -1,44 -1,44 + j0,007 -1,44 + j0,07 1,25 1,25 1,26 3,14 3,12 3,08
1,5 -2,25 -2,25 + j0,011 -2,25 + j0,11 1,92 1,92 1,92 3,14 3,13 3,08
2,0 -4,00 -4 + j0,02 -4 + j0,2 2,62 2,62 2,62 3,14 3,14 3,12
4,0 -16,00 -16 + j0,08 -16 + j0,8 4,12 4,12 4,12 3,14 3,14 3,14
0 1 2 3 4 0 1 2 3 4
4
3
2
1
a) b)4
3
2
1
ω/ωc ω/ωc
Fig.29-a) Función de atenuación y b) Función de fase, de un filtro pasa bajo
Q = 20 Q = 20
Ideal Ideal
α
ne per
β r ad

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 395/424
397
Conclusiones
Para concluir veremos los dos tipos de inconveniente que presenta los filtros escaleras de K
constante.
a) Variación de la impedancia característica con la frecuencia
Habiamos visto en el Apéndice II que tanto las secciones T o π, no podían quedar correctamente
cargada dentro de toda la banda de frecuencia, cuando el receptor es una resistencia pura.
Si se ajusta, la carga para las frecuencias bajas, se producirán fuetes reflexiones en las
frecuencias altas y viceversa si la carga se ajusta para las frecuencias altas.
En estas condiciones, la pérdida de transmisión no es igual a la perdida de atenuación.
Es por lo tanto deseable buscar una sección de filtro que ofrezca una menor variación de Z0
dentro de la banda pasante, lo que se hará más adelante. Con los filtros m-derivados
b) Variación de la atenuación con la frecuencia
Hemos visto ya que la atenuación en la banda atenuada es finita, de modo que el filtro no
representa una barrera perfecta para la transmisión de las señales comprendidas dentro de esta
banda.
La característica de atenuación de una sección L.P. sencilla está ilustrada en la Fig. 30-a
Fig. 30
L/2
C2
L/2a) b) L1/2
C2
L1/2
L2
fc
α
ffc
f
α
f ∞

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 396/424
398
Es por lo general deseable tener una gran atenuación cerca de la frecuencia de corte, como
también así en otros puntos.
En la Fig. 30–b se muestra otro tipo de filtro L.P.
Este filtro ofrece una atenuación muy grande para la frecuencia resonancia de Z2.
Eligiendo adecuadamente L2 y C2 esta frecuencia de atenuación (f ∞ ) teóricamente infinita puede situarse en cualquier punto de la banda eliminada.-
Concluyendo podemos decir que en general, los filtros de K constante, se emplean cuando no se
exigen requisito de selectividad muy estricto.
El lento aumento de la función de atenuación es particularmente perjudicial en los sistemas que
se requiere un corte neto.
Ni siquiera será útil la conexión de muchas secciones K en cascada, debido a los efectos
acumulativos de reflexión y disipación.Además desde el punto de vista económico, seria prohibitivo.
De todo lo anterior se deduce que para obtener una característica total mejor, cada filtro deberá
tener un número de elementos mayor que el que tiene un filtro tipo K., dando origen cada adición
a un nuevo parámetro, adquiriéndose así la mayor flexibilidad necesaria en muchos problemas de
filtros.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 397/424
399
Filtro m-derivados
Secciones T m-derivadas
Sería muy conveniente poder asociar varias secciones de modo que cada una de ellas
contribuyera con una frecuencia de atenuación infinita∞
f , en un punto específico de la banda
atenuada, de modo de mantener así un elevado valor de α en toda esta banda.
Para poder conectar en cascada varias secciones de filtro sin que se produzcan reflexiones en los
empalmes, sería necesario que sus impedancias características se conserven iguales para todas
las frecuencias, las secciones tendrían la misma banda de transmisión, puesto que en esta banda,
y solo en esta banda, Z0 es una resistencia pura.
Concluyendo, los filtros m-derivados presenta como características importantes las siguientes:
a) Tienen en la banda de de atenuación, una frecuencia para la cual la atenuación es elevada.
Esta frecuencia se llama de atenuación infinita o cero de transferencia.
b) La media sección, presenta una impedancia característica mas uniforme en la banda de paso,
lo que permite una mejor adaptación.
En el análisis que sigue supondremos que los elementos del filtro son puramente reactivos.
Se presenta en la Fig. 31 un filtro m-derivado tipo T y el filtro K constante del que se deriva, este
último se denomina prototipo T m-derivado.
El filtro m-derivado debe cumplir con las siguientes condiciones:
a) Igualdad de banda de paso con el prototipo. b) Igualdad de impedancia característica con el prototipo.
La impedancia característica de la sección denominada prototipo es:
.4/. 21210 Z Z Z Z T +=
Llamemos Z’1 y Z’2 , las impedancias de ramas de la sección derivada y Z’0T su impedancia
característica.
Imaginemos que Z1 y Z’1 están relacionados por la ecuación:
1'1 . Z m Z = [70]
fig. 31-a Prototipo T
→'0T Z
Z /2Z /2
Z2
Z’ /2Z’ /2
Z’2
fi . 31-b ti o T derivado
'0T Z ← T Z 0←
→T Z 0

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 398/424
400
El problema es entonces, el de hallar una configuración de Z’2 tal que:
'00 T T Z Z = [71]
Si son validas las Ecs. [70] y [71]
4
.
..4
)(.4.
21
2'21
2'1'
2'1
21
21
Z m
Z Z m
Z
Z Z
Z
Z Z +=+=+
m
Z m
m
Z Z
.4
).1( 12
2'2
−+= [72]
Por lo tanto si se le da a Z’2 la configuración especificada por la Ec. [72] e ilustrada en la
Fig. 32, serán idénticas las impedancias características nominales y las frecuencias de corte de
las dos estructuras de la fig. 32.
Estos dos tipos de secciones pueden entonces conectarse en cascada sin reflexiones.
De las Ecs. [70] y [72] podemos ver que:
a) Z’1 es de la misma naturaleza que Z1
b) Z’2 tiene dos ramas, una de impedancias proporcional a la impedancias serie del prototipo, y
otra de impedancia proporcional a la de la rama paralelo del mismo.
El filtro estudiado es el m-derivado serie (llamado así porque la rama que produce atenuación
infinita esta formado por dos elementos en serie).-
Con respecto a los valores que podría tomar m vemos, por la Ec. [70] que no puede ser m < 0,
ya que esto llevaría a capacidades o inductancias negativas.
De la Ec. [72], surge otra condición adicional para evitar la aparición de impedancias negativas,
la que sea m < 1.
Por lo tanto:
0 < m < 1
Z1/2Z1/2
Z2
Prototipo fig. 32 Tipo derivado
m.Z1/2m.Z1/2
m
Z m
4
).1( 12−
m
Z 2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 399/424
401
Por medio de la Ec. [72] y dando diferentes valores a m, puede obtenerse un número ilimitado de
secciones que difieren en algunos aspectos pero que se caracterizan todos por tener el mismo
valor de la impedancias característica semiserie y que pueden conectarse en cascada para formar
un filtro compuesto.-
La fig. 33 muestra la aplicación de este principio para el diseño de filtros L.P. y H.P.Es usual, tomar el tipo más sencillo del K constante como prototipo y derivar de él, las demás
secciones.
.L1/2
C2
.L1/2 m.L1/2
m.C2
m.L1/2
14
21 L
m
m−
2C1
L2
2C1 2C1/m
L2/m
2C1/m
1.21
.4C
m
m
−
Prototi o
Prototipo
Pasa bajos
Pasa altosTipo derivado
Tipos derivado – fig.33
Tipo derivado

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 400/424
402
Variaciones de α y β en filtros m – derivados
El análisis de las secciones de K constante se simplificó, gracias al empleo del parámetro x y
definido por la Ec [31], esto es 21 .4/ Z Z jx =± .
Una simplificación similar se obtiene para las secciones m – derivadas, definiendo un parámetroanálogo xm.
'2
'1
.4 Z
Z jxm =± [73]
ó elevando al cuadrado:
'
2
'12
.4 Z
Z X m −= [74]
Puede demostrarse que xm, está relacionado con x, introduciendo en ésta última, los valores de
Z’1 y Z’2 dados por las Ecs. [70] y [72]:
[ ] [ ] 22
22
212
2
12
12
2
12
).1(14/).1(1
1.
4.
4/).1(/4
.
xm
xm
Z Z m Z
Z m
m Z mm Z
Z m xm
−−=
−+−=
−+
−=
⇒
22
2
2'2
'
11
14 x
m
m x Z Z m
−−=−= [75]
Recordando en el párrafo de filtros escalera, la condición de banda de paso, resulta entonces para
el filtro m- derivado:
0
11
1
22
2≤
−−
≤−
xm
m [76]
Obsérvese cuando x = ± 1 ó nulo (0) es x = xm , independientemente del valor de m.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 401/424
403
Representación gráfica de )(.4/ '2
'1 x f Z Z =
Para cierta absisa ∞ f , se cumple que:
2'2
'1
2
2
1
1
4
01
1m
f
Z
Z
f
m
−
±=⇒∞=⇒=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−− ∞
∞
Cuando.
⎭⎬⎫
−<−
>
∞
∞
f x
f x Es 0
.4 '2
'1 >
Z
Z y cuando ∞→ x , entonces
2
2
'2
'1
1.4 m
m
Z
Z
−→
Luego como analogía directa de la Ec. [20], puede escribirse para las secciones m derivadas:
'2
'1
42.
2cosh
2cos.
22 Z
Z sen j senh senh =+= β α β α γ [77]
Esta ecuación puede manejarse del mismo modo que la Ec. [20], resultando las siguientes zonas:
Caso A: 04/ '2
'1 < Z Z
Zona I Banda pasante: -1 ≤ x ≤ 1
α = 0
22 ).1(1..2..2 X m
m senarc senX arc
X m
−−== β [78]
(III) (II) (I) (I) (II) (III)
∞− f -1 1 ∞ f
Banda de paso
'2.4
'
Z
Z
'2.4
'
Z
Z −
2
2
1 m
m
−
x
Fig.34

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 402/424
404
Zona II Banda atenuada: (ver Fig. 34)
∞−>>−
∞<<+
f x
f x
1
1
22).1(1.cosh.2cosh.2
xm
marc xarc X m
−−==
±=
α
π β
[79]
Caso B 04/ '2
'1 > Z Z
Zona III Banda atenuada: ∞> f x y ∞∞∞ −<<+∴−< f x f f x
22
).1(1
..2
0
xm
m senharc X
−−
=
=
α
β
[80]
Estos resultados están representados en la fig. 35.
Debe observarse que en las regiones correspondientes a la zona I, se eligió el signo de β de modo
que su curva, tenga pendiente positiva.
La comparación de la fig. 35 con la fig. 15, muestra que las secciones m-derivadas tienen las
mismas bandas de transmisión que sus prototipos.
Zona III II Zona I II Zona III
α α
β
β
β
α
212
m
marcsenh
−
-π
π
ωc
Fig.35-Curvas universales de α y β para filtros m- derivados.En líneas de rayas los efectos disipativos de α y β
- ∞ f 1 1 ∞ f
x

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 403/424
405
Estoe era de esperar, ya que el diseño de una sección m-derivado, se basa en que los dos tipos de
sección tengan la misma impedancia característica para todas las frecuencias.
Se ha demostrado previamente que las bandas quedan unívocamente determinadas por el carácter
de Z0, es decir, según que ésta sea real o imaginaria.
Estos gráficos valen tantos para el filtros derivado serie como para el paralelo.-
Frecuencia de atenuación infinita
La fig. 34 o la fig. 35 muestran también que las secciones m- derivadas proveen atenuación
infinita en ciertas frecuencias, los que corresponden a 21/1 m x −= .
Podemos ver que adoptando valores de m cercanos a 1, la frecuencia ∞ f se aleja del valor
correspondiente a la frecuencia de corte
Si hacemos m = 1 , tenemos el filtro de K constante en el que ∞=∞ f
Esta relación puede aprovecharse para elegir m de manera que ∞ f coincida con el punto que se
desee de la banda atenuada.
Por ejemplo, por la Ec. [35] para el filtro pasabajo es x = f /f c .
Luego para ∞= f f
21
1
m fc
f x
−
== ∞
De donde
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=
∞ f
fcm 1 [81]
Se puede observar en la fig. 33 que la atenuación infinita ocurre como consecuencia de la
resonancia de la rama en paralelo (Z’2) de la sección m- derivada, la que representa un
cortocircuito a través de la red.-
Pueden obtenerse expresiones correspondientes para los otros tres tipos básicos de filtros.Para valores pequeños de m, en cambio la frecuencia de atenuación infinita está cerca de la
frecuencia de corte, lo que mejora la pendiente de atenuación cerca de la frecuencia de corte,
pero la empeora a frecuencias alejadas.
Este último efecto hace que en la práctica sea:
0,25 < m < 1
Un valor habitual es m = 0,6 que tiene ciertas particularidades que ya veremos más adelante.-
Representaremos gráficamente el efecto de la variación de m sobre las características deatenuación.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 404/424
406
Por esta razón y para mejorar la atenuación en las frecuencias alejadas de las banda de paso, la
sección m – derivada rara vez se utiliza sola si no que se coloca en cascada con el filtro
m – derivado, uno de K constante.
Esta combinación de secciones diferentes da lugar a los filtros compuestos que veremos mas
adelantes.-
Fig. 36 x
m
α

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 405/424
407
Medias secciones de terminación
Las medias secciones de los filtros m-derivados se utilizan como adaptadores de impedancia.
Como se trata de cuadripolos asimétricos, en las medias secciones no se puede hablar de
impedancia característica, sino de impedancia imagen (ver apéndice V).-
Todas las secciones T discutidas hasta ahora, tanto la prototípica como la m- derivada, tienen una
impedancia característica Z0T dada (en el apéndice II) por la Ec. 20 1. x R Z T −= y representada
en el apéndice II.
Se observará que en la banda pasante, Z0T es una resistencia pura cuyo valor varía con la
frecuencia.
Es por lo tanto difícil terminar adecuadamente estas secciones.
Esta dificulta puede reducirse recurriendo al empleo de semisecciones
(o secciones L) como transformadoras de impedancia.
La fig. 37-a) muestra una sección T prototipo, en b) se muestra la sección Tm-derivada y en c) la
media sección Tm –derivada:
Z1/2Z1/2
Z2
Fig. 37 - a) b) c)
Z’2
m.Z1/2m.Z1/2
⎪⎪⎪
⎭
⎪⎪
⎪
⎬
⎫−
m
Z
Z
m
m
42
1.
4
)21(
m.Z1/2
⎪⎪⎪
⎭
⎪⎪
⎪
⎬
⎫−
m
Z
Z
m
m
22
1.
2
)21(
2Z’2

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 406/424
408
Apéndice V
Propiedades de las medias secciones
Consideremos la sección L básica de la fig. 1-a.
Si se conectan en cascadas dos de estas secciones L básicas, uniendo sus ramas en derivación.
Las dos ramas en derivación, tienen cada una el valor 2Z2, dando por resultado Z2, con lo que se
obtiene la sección T simétrica de la fig. 1-b.
En cambio, si las dos secciones básicas se unen en cascada de manera que se junten las dos
ramas serie, las dos ramas tienen cada una el valor Z1/2 y se combinan para dar Z1, obteniéndose
la sección π simétrica de la fig. 1-c.
Propiedad adaptadora de las medias secciones
Sea la sección L básica siguiente.
Como vemos es un circuito asimétrico, por tanto aquí no existe impedancia característica sino las
impedancias imágenes y vamos a calcularlas.
Por definición de impedancias imágenes, en base a las impedancias de entrada y salida, a circuitoabierto y en cortocircuito es:
( )ecceca Z Z Z .01 = y ( ) scc sca Z Z Z .02 =
Luego 21 2
2 Z
Z Z eca += ;
21 Z
Z ecc = ; 22 Z Z sca = ;
21
21
22
.
Z Z
Z Z Z scc
+=
Calculo de Z01
⎟ ⎠
⎞⎜⎝
⎛ +=⎟
⎠
⎞⎜⎝
⎛ +=
4.
2.2
21
211
21
01 Z
Z Z Z
Z Z
Z Luego T Z Z 001 =
Z1/2
⇒01 Z 2Z2 02 Z ⇐
Z1/2
2Z2
f i . 1-a b c)
Z1
2Z2 22Y
Z1/2Z1/2
Z2 2Z2
22Y

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 407/424
409
Calculo de Z02
==
⎟ ⎠
⎞⎜⎝
⎛ +
=+
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛
+=
T Z
Z Z
Z Z Z
Z Z
Z Z
Z Z
Z Z
Z Z Z Z
0
21
121
21
12
221
21
21202
.
4
.
4/
.
22/
..2 020 Z Z =π
Por lo tanto la semisección L sirve como transformador de impedancia.
Es decir si a la semisección L se la carga con la impedancia característica de la sección π
equivalente, se ve a la entrada el valor de la impedancia característica de la sección T y
viceversa.-
Z1/2
→T Z 0 2Z2 π 0 Z

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 408/424
410
Media sección derivada de la T prototipo
La media sección Tm-derivada de la fig. 38-b) tiene la siguiente propiedad:
Si la impedancia imagen izquierda tiene un valor Z0T (impuesto por la sección de K constante de
la fig. 38-a), conectada a la izquierda), la impedancia imagen derecha tendrá el valor Zπm.
Este es el valor que corresponde a una sección m-derivada T, conectada como el circuito π.
Calcularemos la expresión de Zπm.
Recordando que la impedancia imagen es:
Zscc Zscam Z Z ..02 == π
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −++
⎥⎦
⎤⎢⎣
⎡−+
=−
++
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
−
=
m
mm
Z
m
Z
Z
Z m Z Z
Z
m
m
m
Z mZ
mZ
m
Z Z
m
m
Zscc)1(
.2
2
4).1(1.
.
4
)1(22
2
2.
2.
4
)1(2
212
2
1221
1
221
121
2
)4
1(.2
).1(1..
)4/.(2
).1(1..
)1.(2
2).1(1.
2
12
2221
12
2221
2212
2221
Z
Z Z
xm Z Z m
Z Z
xm Z Z m
mm Z
m
Z
xm Z Z
+
−−=
+−−
=−++
−−=
)1.(2
).1(1..2
221
x
xm Z m Zscc
−
−−=
⎥⎦
⎤⎢⎣
⎡−+=
−+=
4).1(
2.
2
)1(2 1221
22 Z m Z
m Z
m
m
m
Z Zsca
[ ]222 ).1(12
X mm
Z Zsca −−=
Luego:
[ ][ ]
[ ])1(
)1(1.
1(1.
2
.)1(2
)1(1
. 2
22221222
2
221
x
xm Z Z
xmm
Z
x
xmmZ
m Z −
−−
=−−−
−−
=π
Z /2Z /2
Z2
Fig.38-a) Prototipo Fig.38-b) ½ Sección derivada de T
m.Z1/2
m
Z
Z m
m
22
1.4
)21(2 −
⎭⎬⎫
⇐ m Z π →⇒⇒ T Z imponeSe 0..SeObtiene

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 409/424
411
[ ]22
2)1(1
1. xm
x
Rm Z −−
−=∴ π [82]
Es conveniente observar como varia Zπm con x de acuerdo con el parámetro m.
Para ello se ha representado en la fig. 39 la familia de curvas correspondientes a la Ec. [82].
Por razones de conveniencia, las curvas se han representado en forma normalizada, con la
variable Zπm/R invertida, es decir se ha representado su inversa R/ Zπm.
El uso de esta variable invertida limita la mayor parte de la curvas a valores finitos y facilita la
comparación.-
La inspección de las curvas muestra que para m = 0,6 , el valor de Zπm queda dentro del 4 por
ciento del valor de la impedancia nominal R para casi el 90 por ciento de la banda pasante.
Se aprovecha este hecho como solución satisfactoria para el problema de la terminación.
Cualquiera de las secciones T, prototipo o m-derivada, puede unirse a la sección de terminación
L, con m = 0,6.
Como carga de terminación se utiliza la resistencia R.
Así gracias a la propiedad transformadora de impedancia de la semisección, la sección T tiene
casi la terminación Z0T, para aproximadamente el 90 por ciento de la banda pasante.
1,8
1,6
1,4
1,2
1,0
0,8
0,6
0,4
0,2
0 0,2 0,4 0,6 0,8 1,0
x
m Z
R
.π
m=0,2
m = 0m=0,4
m=0,6
m=0,8
Fig. 39. Variación de la Zπm de la sección π, relacionada a lasección Tm – derivada.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 410/424
412
Secciones π m-derivadas
Hasta ahora, las secciones m-derivadas han sido secciones T diseñada sobre la base de la
igualdad de la impedancia característica semi serie Z0T.
Es también posible diseñar secciones m-derivadas de manera que Z0π sea la misma que para el
prototipo.
Estas secciones se llaman a menudo filtros m-derivados semiparalelos.
Para el cálculo de ésta sección partimos de la sección π del K-constante de la fig. 40 y
recordando la expresión de Z0π del apéndice II.
Planteamos la condición arbitraria.
m
Z Z 2'
2 = óm
Z Z 2'
2 .22 = [83]
Además debe ser Z0π = Z’0π .
Luego.
4/.
.
4/.
.2'
1''
''
2121
210
21
21
0
Z Z Z
Z Z
Z Z Z
Z Z Z
T Z
+=
+=
4 434 421
π
Reemplazando en esta igualdad a Z’2 por el valor dado en la Ec. [83]
222
2'1
2'12'
12
22
2'12'
1
2'1
0
21 /.44
...
4.
/..
0
21 m Z Z Z
m
Z Z
Z
Z Z
Z
m
Z Z
m Z Z
Z
Z Z
T T
=⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ +⇒
+
=
2
22'
1
'1
2
22
212
2
22
21
2
222'
1'1
'12
2
22
.4
..
..
.4
..
000
21
m
Z Z
Z
Z
Z Z
m
Z
Z
Z Z
m
Z Z Z
Z
m
Z
Z
Z Z
T T T
=+⇒=⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
Z1 Z’1
2Z’22Z2 2Z2 2Z’2
Fig. 40. Secciones π con idéntica impedancias características
⇐ 2Zπ ⇒

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 411/424
413
=−
=⇒⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −=
).4(
4..
.
.
4
...
.
221
222
2
22
22
22
21'
12
22
2
22'
12
2
22
0
0
00
21
0
21
Z Z m Z Z
Z m
Z m
Z Z Z Z
Z
Z Z
m
Z Z
m
Z
Z
Z Z
T
T
T T T
( )=
−+=
−+=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ − 2
21
21
221
212
21
21
221
21222
2
222
14
.
.
4.
4.
.
44
4.
0
21
m Z
Z Z
Z mZ
Z m
Z Z Z
Z mZ
Z m Z Z
Z m Z Z
T
( )⎥⎦⎤
⎢⎣
⎡ −+ 2121
221
14
.
.
m Z
Z Z
Z mZ
( ) ( )⎥⎥⎦⎤
⎢⎢⎣⎡
−+−
=
−+
=
)1(4..
41
)).((
41.
)).((
2212
21
212
21'1
m Z Z m
Z mZ
m Z Z
Z mZ Z
A esta última expresión la multiplicamos y la dividimos por m
( )'1
221
221
221
221'
1
)1(
4.
.)1(
4).(
)1(
4..
4
1
)).(( Z
m
m Z mZ
Z m
mmZ
m
m Z mZ
m
mZ mZ Z =
−+
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
−=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−+
−= [84]
Observando esta ultima expresión vemos que Z’1 esta formado por el paralelo de dos
impedancias.
Una rama en función de Z1 y la otra rama en función Z2.
Luego con la Ec. [83] y la Ec. [84], podemos armar el circuito π m-derivado y su media sección
de la fig. 41
La sección π m-derivada posee la misma propiedades de atenuación y fase que el filtro de K
constante tipo π.
El cero de transmisión se produce cuando resuenan las dos ramas en paralelo que forman Z’1.-
2Z2
Fig. 41
2Z’2 2Z2
Z1
m
Z 22 2
)21(
4 Z
m
m
−
mZ1
m
Z 22
m
Z 22
mZ1/2
2)21(
2 Z
m
m
−

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 412/424
414
Media sección derivada del π prototipo
Como se recordará en el caso de las secciones T, estas medias secciones de terminación son
utilizadas como adaptadores de impedancia.
La media sección derivada del π prototipo tiene la siguiente propiedad:
Si la impedancia imagen izquierda tiene un valor Z0π (impuesta por la sección de K constante.
conectado a la izquierda), la impedancia imagen derecha tendrá el valor ZTm.
Este es el valor que corresponde a una sección m-derivada π conectada como circuito T.-
Recordando que Zscc Zsca Z Z Tm .02 ==
Calcularemos el valor de esta dos última impedancia aplicado al circuito de la fig. 42-b).
[ ]22
1
221
22
21
2
221
221
221
4)1.(.
.2
.)1(2
4)1.(
)1(
.
.)1(
2
2
.)1(
22
Z m Z m
m Z Z
m
mZ mmZ
m
m Z Z
Z m
mmZ
Z m
mmZ
Zscc+−
=
−
+−
−=
−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−=
[ ]221
2
122
21
)1(1.24
).1(1.4
.2
xm
mZ Zscc
Z
Z m Z
m Z Z Zscc
−−=⇒
⎥
⎦
⎤⎢
⎣
⎡−+
= [85]
[ ] [ ]22
2221
22
2212
)1(1.2
)1(1.42
)1(1.2
2
xmm
xm Z Z m
m
Z
xm
mZ
m
Z Zscc Zsca
−−
−−+=+
−−=+=
[ ]( )
[ ]22
22
222
122222
)1(1.
1.2
)1(1.2
41.4
xmm
x Z Zsca
xmm
Z
Z m xm x Z
Zsca−−
−=⇒
−−
⎥⎦
⎤⎢⎣
⎡++−
= [86]
Con las Ecs. [85] y [86] podemos calcular ZTm
2Z2
Fig. 42-a) Prototipo π Fig. 42-b) Media sección derivada de π
2Z’22Z2
Z1
Tm Z ← Se obtienem
Z 22
mZ1/2
2)21(
2 Z mm
−⇒← π 0 Z se impone ⇒π 0 Z

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 413/424
415
[ ] [ ] [ ]22
221
22
22
221
)1(1
1..
)1(1
)1.(2.
)1(1.2 xm
x Z Z
xmm
x Z
xm
mZ Z Tm
−−
−=
−−
−
−−=
[ ]22
2
)1(1
1.
xm
x R Z Tm
−−
−= [87]
Si observamos en la Ec. [87] la expresión R
Z Tm que la comparamos con la Ec. [82] en la que se
hizoTm Z
R , vemos que ambas expresiones son iguales, por lo tanto la representación gráfica de
R
Z Tm es exactamente igual a la dem Z
R
.π
la cual se ha graficado en la fig. 39.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 414/424
416
Filtros compuestos
Los filtros de una sola sección, rara vez proveen la atenuación necesaria para la mayoría de los
fines prácticos.
Si se unen en cascada varias secciones de idénticas impedancias características, la atenuación
total, a una frecuencia cualquiera, será la suma de las atenuaciones de las secciones individuales,
de modo que resulta así posible construir un filtro capaz de satisfacer los requisitos impuestos.
Si todas las secciones fueran similares a la de la fig. 30-a), la atenuación total no podría ser
nunca muy grande para las frecuencias apenas apartadas de la frecuencia de corte.
En cambio, si todas las secciones fueran como de la fig. 30- b), la atenuación se elevaría
rápidamente por encima de la frecuencia de corte hasta alcanzar∞ f pero decaería luego para las
frecuencias más altas.
Exígiese casi siempre que la atenuación sea grande para todas las frecuencias de la banda
atenuada.
Este requisito puede satisfacerse de manera conveniente usando varias secciones de iguales
frecuencias de corte y la misma impedancia característica, pero con diferentes frecuencias de
atenuación infinita.
El empleo de secciones m-derivadas, cada uno de ellos con un valor especifico de m, permite
llegar a este resultado sin que haya reflexiones en los empalmes.
Por otra parte, el empleo de semisecciones de terminación con m = 0,6, transforma Z0T en unaresistencia esencialmente fija R, igual a la impedancia de característica nominal.
Un filtro compuesto comprende por lo tanto, casi siempre, las siguientes componentes:
A) Una ó más secciones prototípica.
B) Una ó más secciones m-derivadas, en la que se elige m de manera de obtener las frecuencias
de atenuación infinita deseadas.
C) Dos semisecciones de terminación m = 0,6.
El diseño de un filtro compuesto típico será considerado mas adelante.

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 415/424
417
Resumen de procedimientos de diseño
Los datos fundamentales necesarios para el diseño de un filtro son, las bandas pasantes
(o las frecuencias de corte para los filtros L.P. y H.P.) y la impedancia característica nominal con
la que ha de trabajar.
A partir de estos datos se calculan los componentes del filtro con las Ecs. [36], [37], [38], [40],
[46], [49] y [50], según el tipo de filtro deseado.
Se construye entonces una o mas secciones según las relaciones de la fig. 37 ó fig. 41.
El número de secciones necesarias quedará determinado por los requisitos de atenuación, fuera
de la banda pasante y los valores de m se elegirán de manera de distribuir adecuadamente las
frecuencias de atenuación infinita.
Si el corte tiene que ser neto, se necesitará una sección de bajo valor de m.
Los extremos del filtro deben contener semisecciones con m = 0,6.La rama en paralelo de una semiseccion de terminación debe tener el doble de impedancia en
comparación con la rama en paralelo de la sección T, dado que la rama en paralelo de una
sección π es 2Z2.
Esto significa que deben duplicarse las inductancias y partirse por dos la capasitancias de la
rama en paralelo de la sección T.
Debe observarse que, en el tipo de diseño desarrollado en detalle se ha elegido como prototipo la
sección T correspondiente a la clase de filtro del caso, derivándose luego de la secciones
T m-derivadas, y finalmente, las semisecciones de terminación según las ecuaciones de la fig.
38.
Es también posible partir de un prototipo π, derivar otras secciones π según la fig. 41 y usar dos
secciones de rama Z1 y Z2 diseñadas según las ecuaciones de la fig. 41.
La fig. 43 ofrece un resumen de los diferentes tipos de sección con sus impedancias
características.
m1L/2
Fig. 44 Filtro LP compuesto derivado por las relaciones de la fig. 41
m2L m3L/2
C m
21
C m
22
C m
m
12
211−
C m
m
4
221 −
C m
22
L
2
C C m
m
32
231 −
2
C
C m
23
½ Sección derivada Sección π derivada ½ Sección derivada del π
Transforma Z0π en unaResistencia casiconstante
Por lo común m1 = m3 = 0,6Transforma Z0π en unaResistencia casi constante

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 416/424
418
Figura 43. Resumen de las impedancias características de las secciones del filtro L.P prototipitoy m- derivada, en función de la frecuencia.
mL
C m
m
4
21−mC/2
m.CC
m
m
2
21 −
Sección π derivada (Z0π independiente de m)
Sección derivada como π y reordenada como T (ZTm depende de m)
f
Z0T
f
ZTm
mL/2
L/2L/2
C2
m.L/2
m.C
m.L/2
Lm
m
4
21−
L
mC/2
mL
Lmm ..2
2
1 −
Sección rototi o T
Sección T derivada (Z0T independiente de m)
Sección prototipo π
Sección derivada como T y reordenada como π (Zπm depende de m)
f
Z0T
f
Z0T
f
Zπ
m
C/2f
Z0π

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 417/424
419
Los filtros diseñados según las relaciones de la fig. 41, tiene el aspecto general ilustrado en la
fig. 44, donde las capacitancias de las secciones adyacentes se combinarían en un solo capacitor.
Podría elegirse entre el diseño de la fig. 44, basado en la sección π y el de la fig. 45, basado en la
sección T, sobre la base de la conveniencia o economía de los elementos para realizar
físicamente el proyecto, o del efecto de la impedancia de entrada del filtro sobre elcomportamiento del sistema de transmisión en conjunto.
Por ejemplo, los terminales de entrada de un filtro pasa bajo del tipo de la fig.45, no podrían
disponerse en paralelo con los de un filtro H.P. destinado a dejar pasar las frecuencias superiores
a 1000c/s, porque la primera rama en paralelo resuena a 1250c/s y pondría así en cortocircuito la
entrada del filtro pasaalto en esta frecuencia, que debería pasar sin atenuación.
El filtro de la fig. 44 podría usarse más eficazmente, pues su impedancia de entrada, a esa
frecuencia, seria muy alta dado que la primera rama serie seria antirresonante.
No obstante en muchos casos, se necesitan fórmulas de cálculo más complicadas para diseñar
filtros que deben trabajar en paralelo con el fin de obtener adecuadas relaciones de impedancia.-
Como ejemplo de cálculo de un filtro L.P. compuesto, diseñaremos uno para una frecuencia de
corte de 1000 c/s y para trabajar con una carga de 600 Ω.
Con el objeto de lograr un corte neto, se elegirá un valor de f ∞ de 1050c/s.
Las semisecciones de terminación con m = 0,6 darán también, según la Ec. [81] un valor de
f ∞ en 1250c/s.
Se usaran secciones T.
Los valores de los componentes del prototipo serán según las Ecs. [36] y [37]
Hy L L 1910,01910,01000.
600
1 =⇒==
π
0,0955
Fig. 45. Filtro compuesto LP, de 600 Ω, frecuencia de corte =1 Kc/s
,0292
0,102
0,1595
0,0573 0,0955 0,05730,0292
0,531 0,162
0,1420,102
0,1595
0,1247
0,102
0,1595
0,1528 0,0865
0,531
0,142
0,162
0,102
0,1595
b)
⇒
m = 0,6 m = 1
Prototipo
m = 0,305 m = 06

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 418/424
420
F C C μ π
531,010.531,0600.1000.
11
61 =⇒== −
Para la sección π m-derivada y con f ∞ = 1050c/s, se tiene según la Ec. [81]
305,0305,0105010001 1
2
1 =⇒=⎟ ⎠ ⎞⎜⎝ ⎛ −= mm
Con este valor de m1 procedemos a calcular los componentes de la sección T m- derivada.
743,022,1
907,0
4
1
1
21 ==
−m
m
20292,0
2
.0292,0
2
1910,0.305,0
211111 Z
Hy Lm Lm
==⇒==
'2
1111
11
21
11
21
162,0162,0531,0.305,0
142,0.4
1142,01910,0.743,0.
4
1
Z
F C mC m
Hy Lm
m Hy L
m
m
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
=⇒==
=−
⇒==−
μ
Para la semi sección de terminación calculamos sus componentes con m2 = 0,6 por todo lo visto
anteriormente, resultando:
2/0573,02
'1
12 Z Hy Lm
==
'2
1212
12
22
12
22
2
319,0319,0531,0.6,0
051,0.4
1051,0191,0.2665,0.
4
1
Z
F C mC m
Hy Lm
m Hy L
m
m
⎪⎪
⎪
⎭
⎪⎪⎪
⎬
⎫
=⇒==
=−
⇒==−
μ
El filtro completo es de la fig. 45.
Dado que no hay necesidad de preservar la identidad de los inductores en serie, los inductores
adyacentes de las ramas en serie se combinan en una unidad para dar así lugar a la estructura
final de la fig. 45- b.
Este procedimiento reduce el número de elementos y en general mejora el factor de calidad de
los elementos inductivos, de las ramas en serie.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 419/424
421
Efectos de los elementos disipativos. (Atenuación)
Puede obtenerse una estimación razonable de la repuesta del filtro, aplicando directamente la
teoría de las estructuras iterativas, sujeta a dos hipótesis a saber:
que los elemento del filtro no tienen pérdidas y que la sección está correctamente terminada para
todas las frecuencias.
Se observa que la pérdida total de transmisión, es la suma de la atenuación de cada una y todas
las secciones y que el desplazamiento de fase total, es la suma de los desplazamientos de fase
individuales.-
En la práctica, ninguna de estas hipótesis se ve satisfecha debido a las discrepancias que hay
entre los valores calculados y los medidos.
Consideremos ahora estas discrepancias.-
Si hay disipación, el empleo de la Ec. [20] exige en general el uso de tablas o ábacos defunciones hiperbólicas inversas y formulas tales como las que se encuentran en textos como
“Wave filters” de SHEA, ó “Líneas de transmisión y filtros eléctricos” de KARAKASH.
Sin embargo, los puntos para las cuales la disipación produce los mayores errores serán en
general las frecuencias de cortes y los de atenuación infinita.
Para estas frecuencias pueden hacerse algunas simplificaciones.
La disipación de los capacitares es casi siempre despreciable, en comparación con la de los
inductores.Para
∞ f , la disipación importante es la del inductor de la rama en paralelo.
Sea Q2 = factor de calidad de este inductor.
⇒−
= R
L
m
mQ 1
2
2 .4
)1.(ω Siendo R, la resistencia del inductor.
Luego, para el filtro L.P. m-derivado del tipo ilustrado en la fig. 33 y en la frecuencia∞ f , se
cumple que:
1'1 . L jm Z ∞= ω
2
12
'2
..
4
1
Q
L
m
m R Z ∞−
== ω
por resonancia.
De donde
º90
22
2
22
2
2
12 1'
2
'
111.
.4
14
.
4
∠
∞∞ −=−=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −= m
Qm
m
Qm j
Q
L
m
m
L jm
Z
Z
ω
ω
[88]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 420/424
422
ó
2/1º90
22
2
'2
'1
14 ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=
∠
m
Qm
Z
Z
Recordando que:( )[ ] ⎟
⎠
⎞⎜⎝
⎛ +=+n
jsenn
jsen nn θ θ ρ θ θ ρ coscos /1/1
[ ] ⎥⎦
⎤⎢⎣
⎡ +−
=+−
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−∴
∠
22
12
2
1
14545cos
11 22
2
22
2
2/1º90
22
2 j
m
Qm jsen
m
Qm
m
Qm 321
321
θ
δ
( ) )1()1(2
1221 22
2
22
2
jm
Qm jmQm +−=+−=
)1(2)1(24 22
2
22
2
'2
'1
m
Qm j
m
Qm
Z
Z
−+
−=∴ [88a]
Luego la Ec. [20]
)1(22.
2cosh
2cos.
2 2
22
m
Qm sen senh
−==
β α β α [89]
Pero α es grande; luego:
22cosh
2
2/α α α e senh ≅≅ [90]
Y ≅ β 90º ya que en ese ángulo es:22
cos β β sen=
Por las Ecs. [89] y [90]
)1(22
1.
2 22
22/
m
Qme
−≅
α
Luego22
2
1
4ln
m
Qm
−≅α [91]
La Ec. [91] puede expresarse en términos de la relación c f f /∞ , usando la Ec. [81]

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 421/424
423
22
2
11 ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=⇒⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
∞∞ f
f m
f
f m cc y
221 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ =−
∞ f
f m c
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡−⎟⎟
⎠
⎞⎜⎜
⎝
⎛ ≅∴
∞
1.4ln2
2 f
f Q cα [91 a]
Analizaremos ahora para la frecuencia de corte, ya que para esta frecuencia es importante la
disipación de los dos inductores.
En este caso:
⇒= R
LmQ c 1
1.
R = resistencia de los inductores L1.
luego: 11
'11'1 .1. Lm jQ
Z L jm R Z cc ω ω ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=⇒+= [92]
21
2
2
'2
21
2'2 .
..4
1.
1
..
4
1
C m
j L
m
m j
Q Z
C m
j L
m
m j R Z
cc
cc
ω ω
ω ω −
−⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=⇒−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −+=
Pero por las Ecs. [36]C
R L
ω
21 = y [37]
C RC
ω .
22 =
4
.1 12
2
L
C
C ω =
Y por lo tanto
m
L jm
Q
m L
mm
m j L
mQ
m Z c
cc 4
.1..
4
1
4
1.
4
1 12
2
2
1
2
12
2'2
ω ω ω
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
−=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
−+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −= [93]
En esto caso es conveniente hallar γ en términos del coseno hiperbólico.
Así según la Ec. [12]:
'2
'1
.21cosh
Z
Z +=γ
De modo que se necesita calcular la relación:
=
+⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
−+
=
−−
+=
42
2
2
2
2
12
2
2
21
2
'
2
'1
1
1)./1.(2
/)1(
)/1.(2
.2 mQ
m
jmQ
m jQm
jmQm
jQm
Z
Z

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 422/424
424
42
2
2
1
2
2
22
21
2
2
1
1
.
1
.2
mQ
m
Q
m
Q
m jm
m
m
+⎟⎟
⎠
⎞⎜⎜
⎝
⎛ −
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
−+
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ −
−
=
Pero si Q1 Y Q2 son ambos grandes, los términos que contienen 22/1 Q ó 2./1 QQ son
despreciables.
Luego suponiendo QQQ =≅ 21 el término imaginario queda igual Q/1 .
Luego:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +−≅
Qm
j
Z
Z
2'2
'1 1.2
.2 [94]
Sustituyendo en la Ec. [12]:
Qm j
Z
Z sen senh j
.
21
.21..cos.coshcosh
2'2
'1 +−=+=+= β α β α γ [95]
1cos.cosh −=∴ β α [96]
Qm sen senh
.
2.
2= β α [97]
Si α es pequeño, β debe ser aproximadamente igual π y pueden hacerse las siguientes
aproximaciones.
Sea:
θ π β −= , donde θ es pequeño
)cos(.cos.cos)cos(cos θ θ π θ π θ π β −=+=−=∴ sen sen
Usando dos términos de la serie coseno (Ver Shaum pag. 111)
12
coscos2
−=−= θ θ β
θ θ θ π θ π θ π β ==−=−= sen sen sen sen sen .coscos.)( , para θ pequeño
Usando dos términos de la serie coseno hiperbólico (ver Shaum 112)
⎪⎭
⎪⎬
⎫
=
+=
α α
α α
senh
21cosh
2
, para α pequeña

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 423/424
425
Luego; Las Ecs. [96] y [97] quedan:
112
.2
122
−=⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
θ α [96a]
Qm .
2.
2=θ α [97a]
Por la Ec. [96a]
04
.
22
2222=+−
θ α α θ
Si α yθ son pequeños, puede despreciarse 4/. 22 θ α , lo que da θ = α.
Introduciendo este valor en la Ec. [97a] nos queda:
Qm
2.
1=α [98]
Las Ecs. [91a] y [98] muestran que al reducirse m y aproximarse ∞ f a f c, aumenta la atenuación
en la frecuencia de corte, mientras que se reduce la atenuación en la frecuencia de atenuación
teóricamente infinita.
Esto impone un limite practico en el uso de secciones m-derivadas para obtener un corte neto enla frecuencia de corte, porque un valor demasiado pequeño de m conduce a un aumento de la
atenuación dentro de la banda pasante, cerca de la frecuencia de corte.
El aumento de la atenuación es tanto más alto cuanto mayor es el valor de Q.
El efecto general de la disipación sobre la atenuación de una sección de filtro esta ilustrado en la
fig. 46.-

7/23/2019 Teoria de Circuitos (Ingenieria UNNE)
http://slidepdf.com/reader/full/teoria-de-circuitos-ingenieria-unne 424/424
En la práctica no es necesario obtener en la forma descripta, la curva entera de α, sino que sólo
interesa el apartamiento de las condiciones ideales para f = fc y para ∞= f f .
El resto de de la curva puede aproximarse “a ojo” , a partir de las curvas teóricas, que se
encuentran graficadas en forma universal.-
En lo referente a la modificacion de Z0, al pasar a las condiciones reales, ocurre que ya no es
totalmente resistiva en la banda de paso, sino que tiene una pequeña componente reactiva.
Ésta puede despreciarse en los cálculos.-
Fig.46
f
∞ f f c
Línea llena filtro sin disipación.
Línea cortada filtro con disipación