
Tema 2: Representación y modelado de sistemas dinámicosfercas/documentos/FCA2Tema2.pdf ·...
66
Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 2: Representación y modelado de sistemas dinámicos
Transcript of Tema 2: Representación y modelado de sistemas dinámicosfercas/documentos/FCA2Tema2.pdf ·...
Fundamentos de
Control Automático
2º G. Ing. Tecn. Industrial
Tema 2: Representación y
modelado de sistemas dinámicos
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
Tema 2: Representación y modelado de sistemas dinámicos
2.1 Señales y sistemas dinámicos
2.2 Modelado matemático de sistemas dinámicos
2.3 Régimen permanente y transitorio.
Característica estática de un sistema.
2.4 Sistemas dinámicos lineales y no lineales
2.5 Linealización
2
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 3
Señales y Sistemas Dinámicos
Señales y sistemas dinámicos
Sistemas: Conjunto de cosas que relacionadas entre sí
ordenadamente contribuyen a determinado objeto.
Señal o variable: toda magnitud que evoluciona con el
tiempo
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
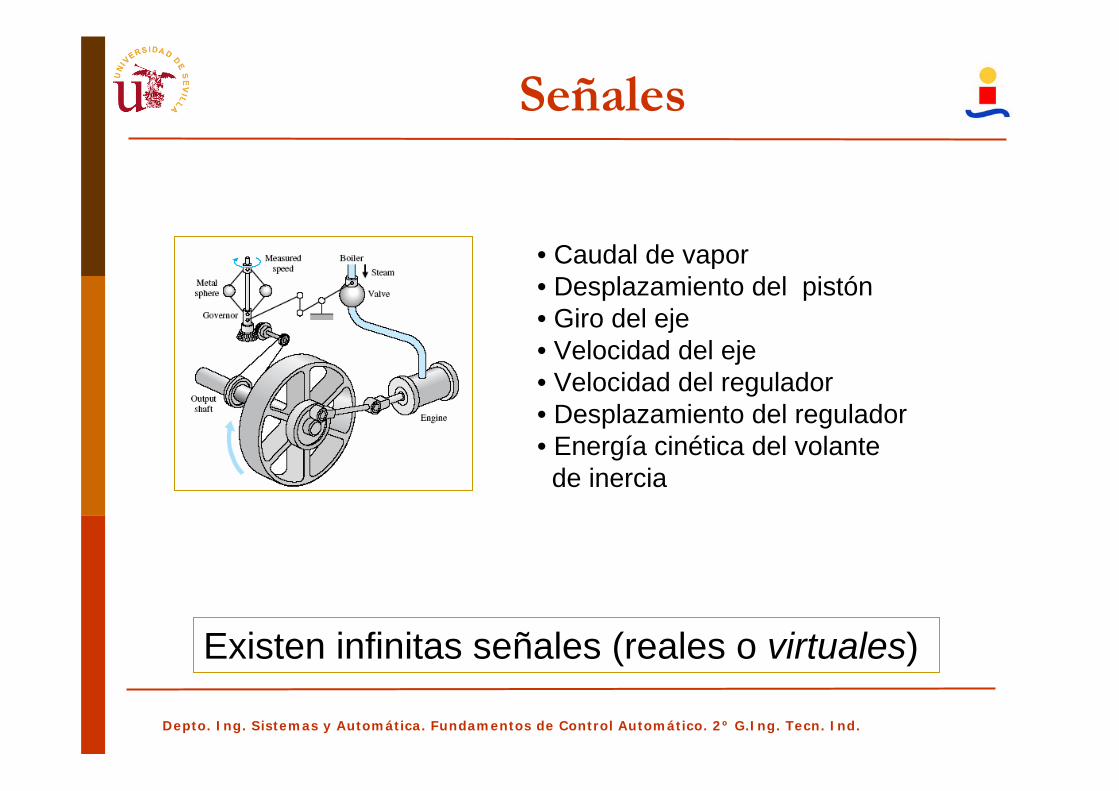
• Caudal de vapor• Desplazamiento del pistón• Giro del eje• Velocidad del eje• Velocidad del regulador • Desplazamiento del regulador• Energía cinética del volante de inercia
Existen infinitas señales (reales o virtuales)

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
5
Clasificación de señales:
Continuas (en el tiempo): definida en todo instante.Ej: cuerpo que se desplaza a velocidad constante
Si impactase contra un muro, ¿Es continua la señal de velocidad?
pos
tiempo
vel
tiempo
vel
tiempo
No confundir con continuidad de la función v(t) respecto a t
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
6
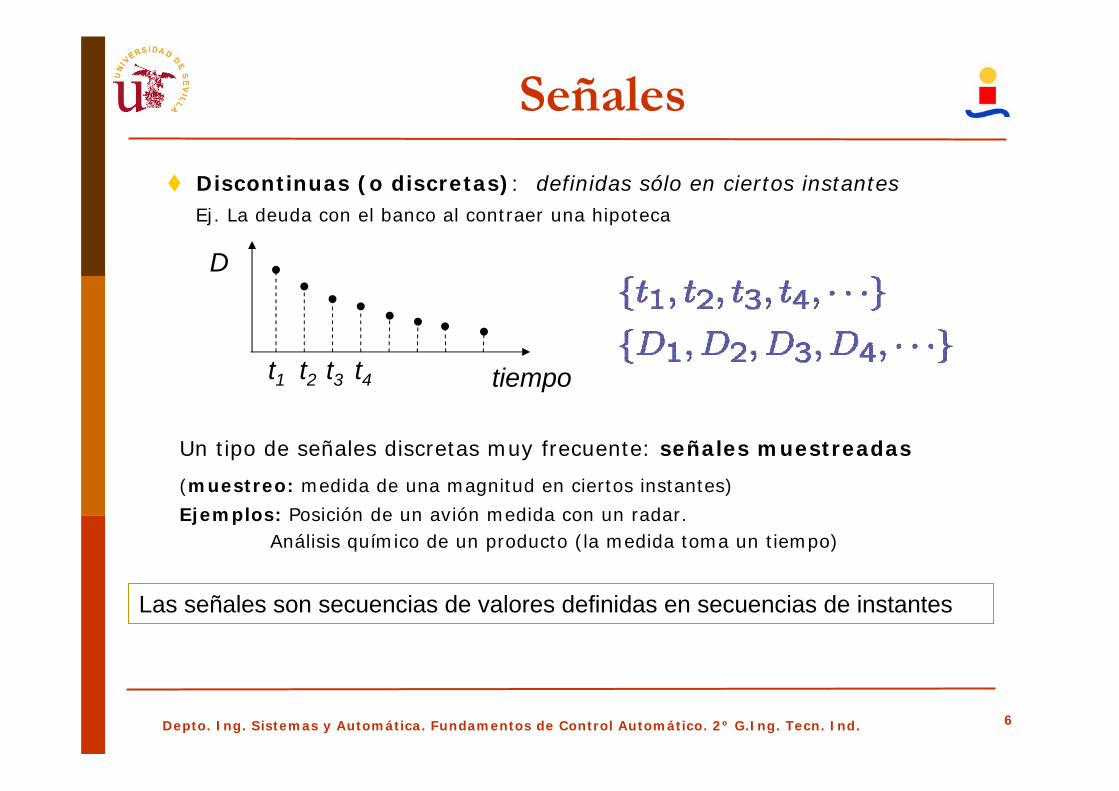
Discontinuas (o discretas): definidas sólo en ciertos instantesEj. La deuda con el banco al contraer una hipoteca
Un tipo de señales discretas muy frecuente: señales muestreadas
(muestreo: medida de una magnitud en ciertos instantes)
Ejemplos: Posición de un avión medida con un radar. Análisis químico de un producto (la medida toma un tiempo)
D
tiempot1 t2 t3 t4
Las señales son secuencias de valores definidas en secuencias de instantes
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
7
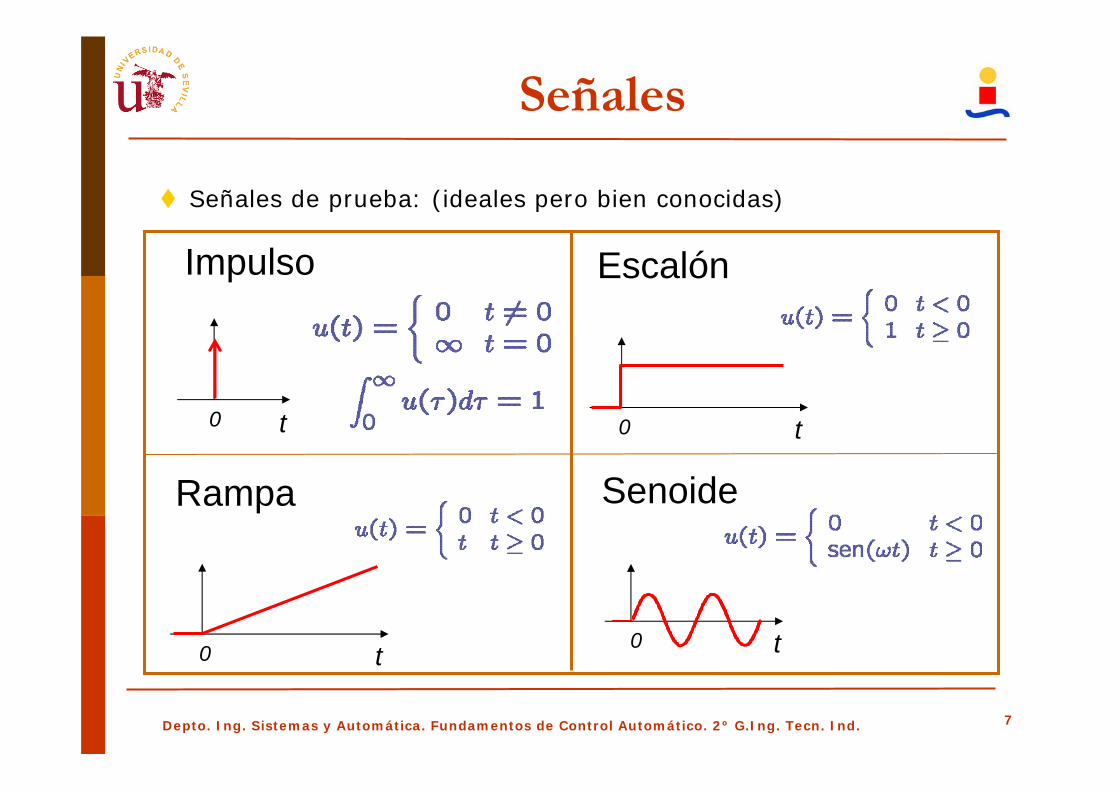
Señales de prueba: (ideales pero bien conocidas)
t0 t0
t0 t0
Impulso Escalón
Rampa Senoide

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
Señales de prueba: Idealizaciones de señales dadas en la realidad
t0
Impulso señal que toma valor infinito en un tiempo infinitesimal…¿para qué sirve?
h(t) qs(t)
Qe
h(t) qs(t)
Qe1m3¿Qa?
8

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
9
•Interpretación del impulso:
m3/s
t1
21
m3/s
t1/2
4
m3/s
t1/4 t1/oo
oom3/s
área 1 área
1 área
1
área
1
co(t)
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
10
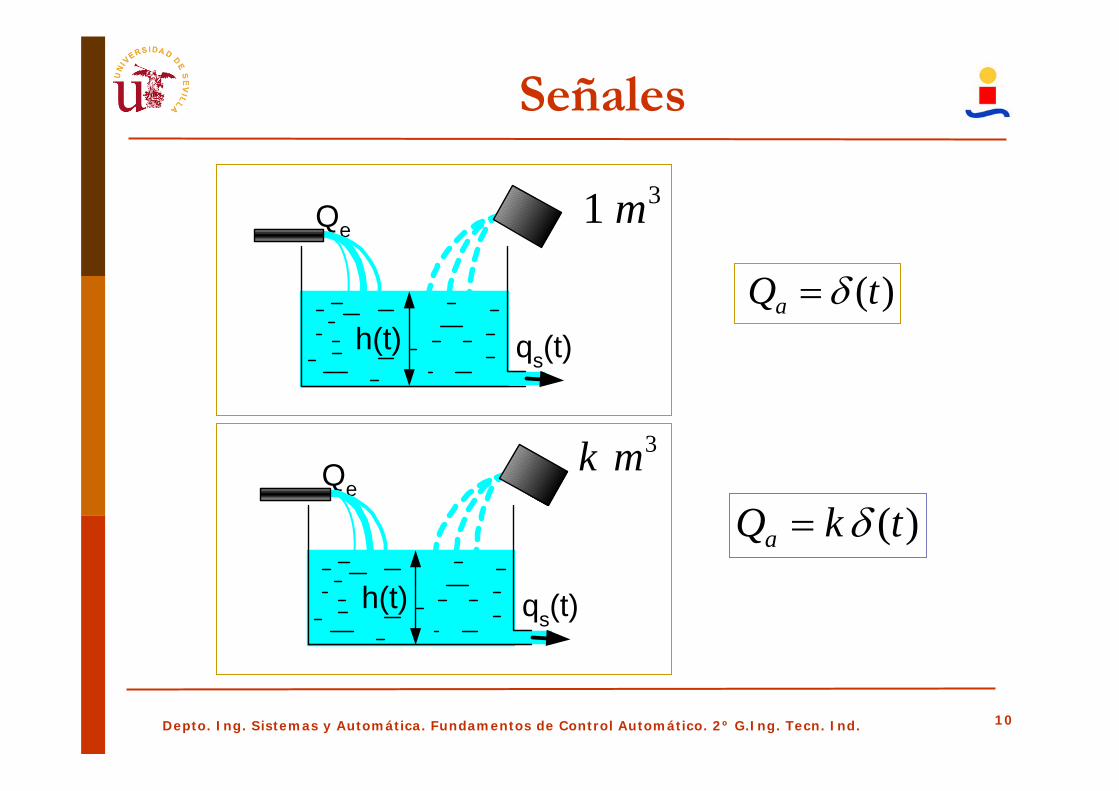
h(t) qs(t)
Qe31 m
h(t) qs(t)
Qe
3mk
)(tQa δ=
)(tkQa δ=
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
11
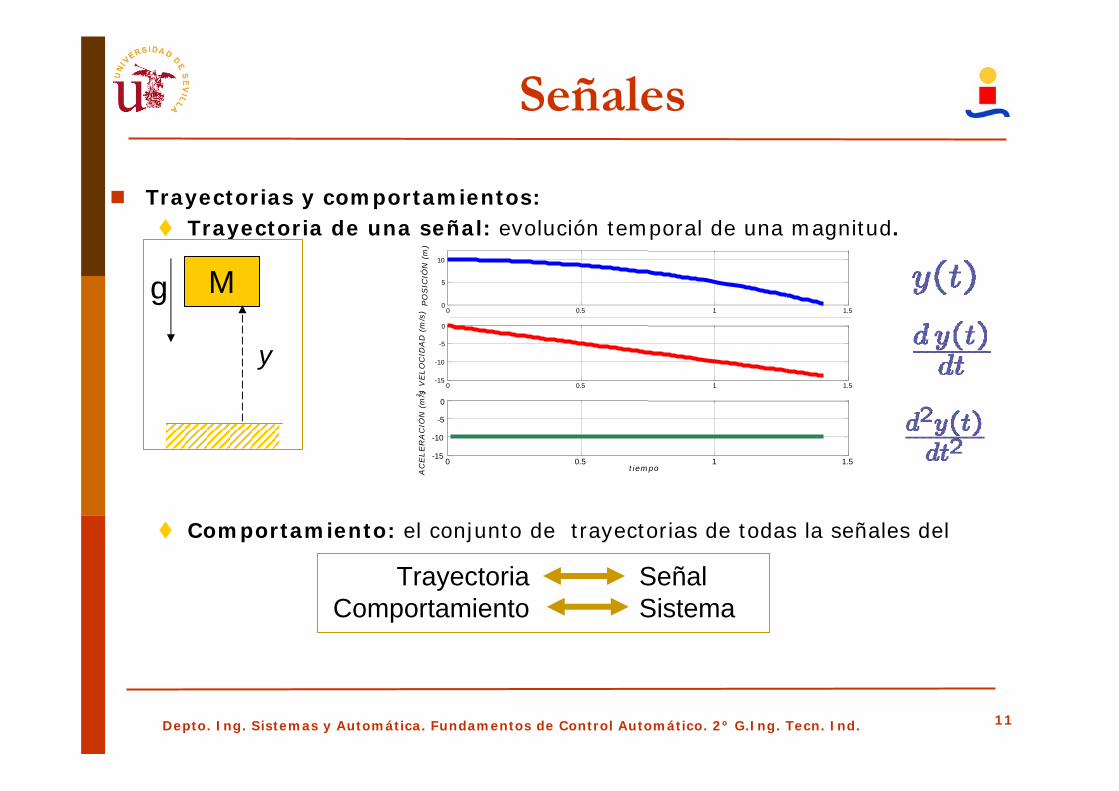
Trayectorias y comportamientos:Trayectoria de una señal: evolución temporal de una magnitud.
Comportamiento: el conjunto de trayectorias de todas la señales del sistema
M
y
g0 0.5 1 1.5
0
5
10
PO
SIC
IÓN
(m
)
0 0.5 1 1.5-15
-10
-5
0
VE
LO
CID
AD
(m
/s)
0 0.5 1 1.5-15
-10
-5
0
tiempoAC
EL
ER
AC
IÓN
(m
/s2)
TrayectoriaComportamiento
SeñalSistema
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
SeñalesEstado de un sistema dinámico:
El conjunto de variables que caracterizan el comportamiento del sistema.
Conocido el estado en t0 , se puede saber la evolución del sistema t>t0
Ejemplo: Cuerpo que cae
variables de estado: posición y velocidad.
Otros ejemplos:
• Circuitos eléctricos: tensión de los condensadores e intensidad en bobinas.
• Sistemas mecánicos: posición y velocidad por cada grado de libertad.
Orden: El número mínimo de variables de estado de un sistema.
Es una medida de su complejidad
M
y
g
12
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
13
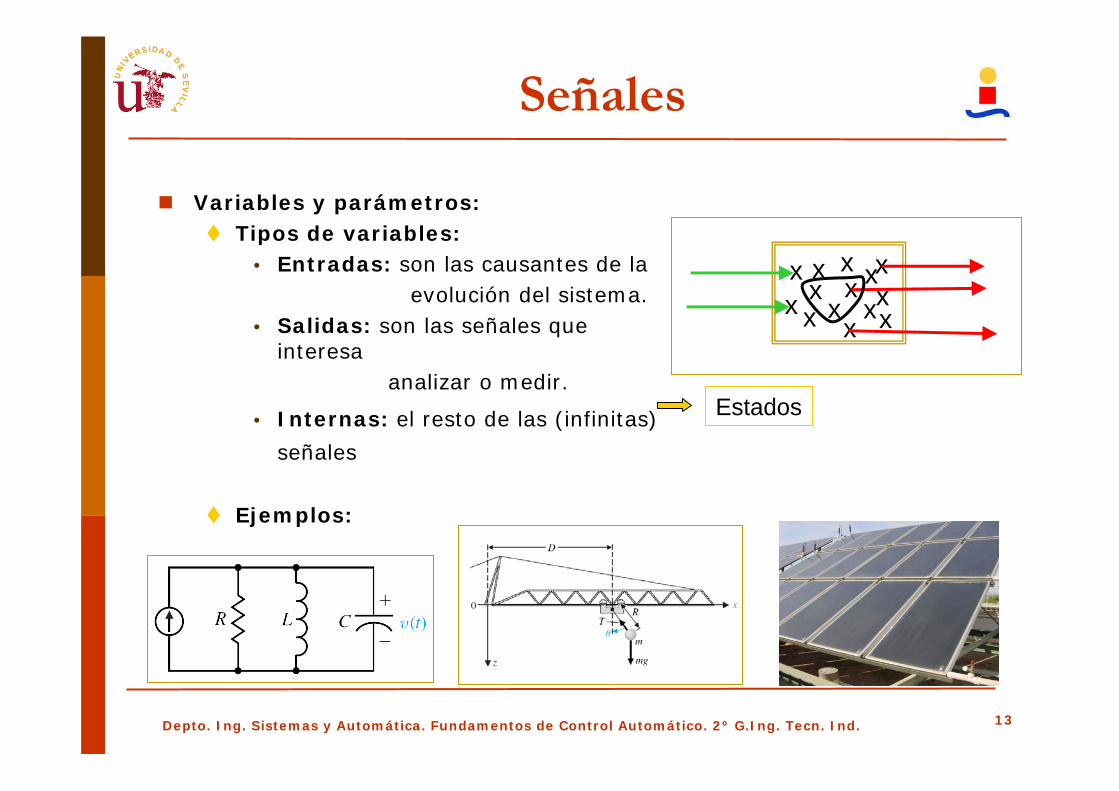
Variables y parámetros:Tipos de variables:
• Entradas: son las causantes de la evolución del sistema.
• Salidas: son las señales que interesa
analizar o medir.
• Internas: el resto de las (infinitas)
señales
Ejemplos:
xx
x
x xxx
xx
xx x
x
x
Estados

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Señales
Tipos de entradas: (desde el punto de vista tecnológico)
• Entradas manipulables: aquellas cuya evolución se puede fijar o manipular
• Perturbaciones: aquellas entradas que no son manipulables.
• Ejemplos:
Parámetros de un sistema: magnitud que caracteriza al sistema y que lo distingue de otro semejante.
• Ejemplo: Distinguir parámetros y señales de los sistemas anteriores
14

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Sistemas Dinámicos
15
Tipos de señales
• Sistemas continuos: Señales continuas • Sistemas discretos: Señales discretas
Influencia del exterior• Sistemas autónomos: No tiene entradas (aislado)
Evoluciona por las condiciones de las que parte.Idealización
• Sistemas no autónomos: Si tiene entradas
Evoluciona por las entradas y por las condiciones iniciales.
M
y
g
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
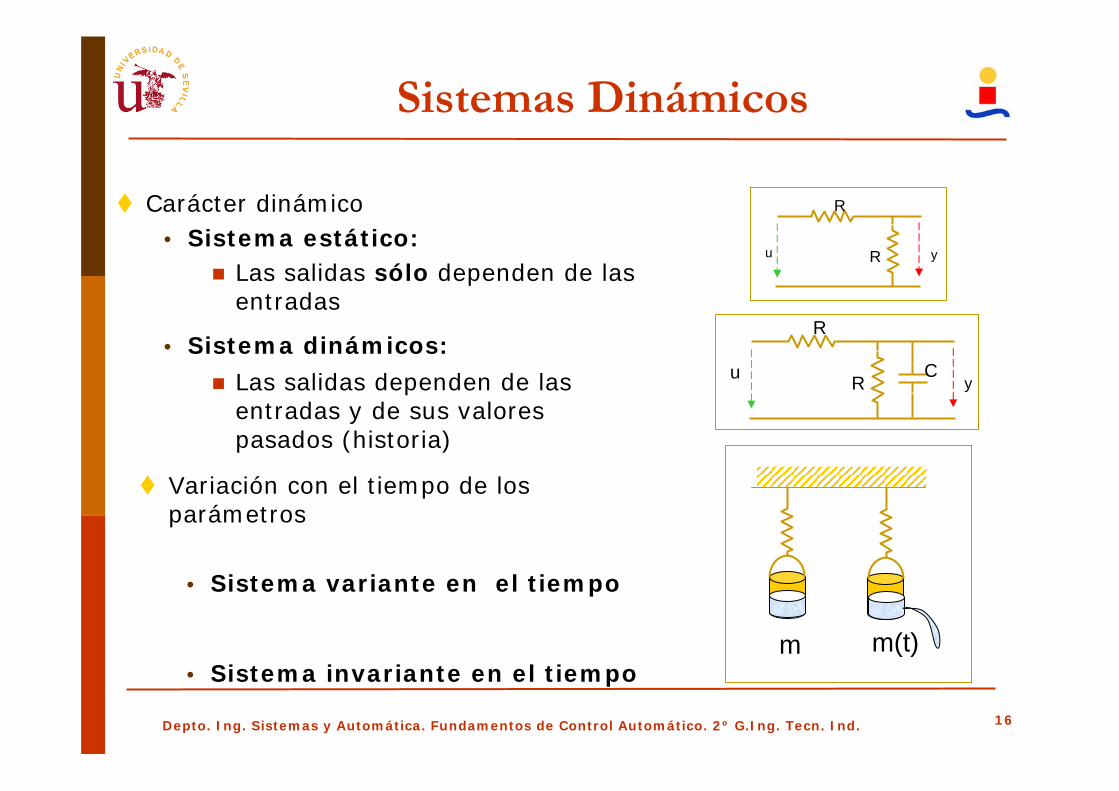
Carácter dinámico• Sistema estático:
Las salidas sólo dependen de las entradas
• Sistema dinámicos:
Las salidas dependen de las entradas y de sus valores pasados (historia)
R
Ru y
u
R
RC
y
Variación con el tiempo de los parámetros
• Sistema variante en el tiempo
• Sistema invariante en el tiempo m m(t)
Sistemas Dinámicos
16

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
Tema 2: Representación y modelado de sistemas dinámicos
2.1 Señales y sistemas dinámicos
2.2 Modelado matemático de sistemas dinámicos
2.3 Régimen permanente y transitorio.
Característica estática de un sistema.
2.4 Sistemas dinámicos lineales y no lineales
2.5 Linealización
17

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelado matemático de sistemasModelo: representación de un sistema
Representación matemática: Ecuaciones diferenciales
• Modelo bien planteado: Nº Ecuaciones=Nº variables independientes implicadas
Modelado a escala
18
Errores de modelado
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelado matemático de sistemasSelección del modelo según su utilidad
• Análisis: Objetivo: estudio cualitativo del comportamiento.
Predecir la evolución del sistema.
Analizar el efecto de la variación de parámetros.
Estudiar el efecto de las entradas sobre la evolución del
sistema.
• Diseño de controlador:Objetivo: controlar el sistema original a partir de un modelo simplificado que recoja su dinámica.
• Simulación:Objetivo: reproducir con fiabilidad la evolución del sistemaEs una tarea más sencilla (integración numérica)Preferiblemente modelos con errores pequeños
19
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelado matemático de sistemas
Identificación de un modeloDeterminación de los parámetros del modelo a partir de ensayos experimentales.
Muy importante en ingeniería
Exactitud frente a sencillez del modeloCompromiso
20
ErrorComplejidad
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelado matemático de sistemas
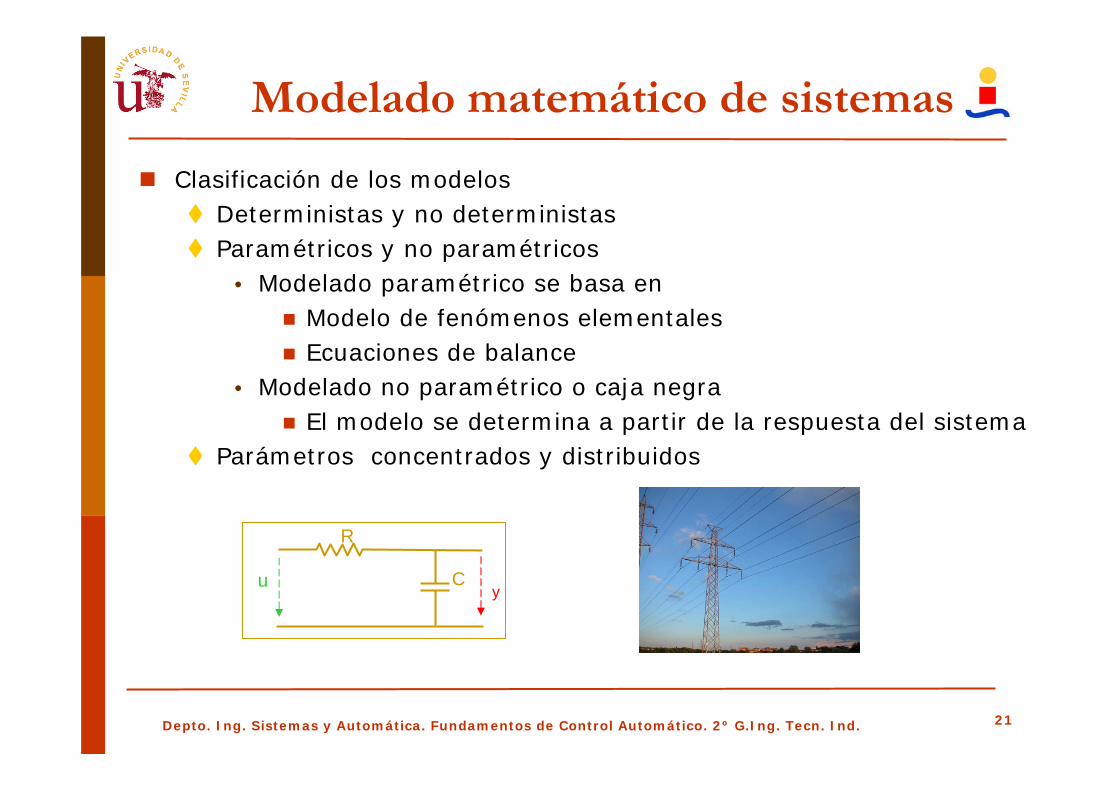
Clasificación de los modelosDeterministas y no deterministasParamétricos y no paramétricos
• Modelado paramétrico se basa enModelo de fenómenos elementalesEcuaciones de balance
• Modelado no paramétrico o caja negraEl modelo se determina a partir de la respuesta del sistema
Parámetros concentrados y distribuidos
u
R
Cy
21
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
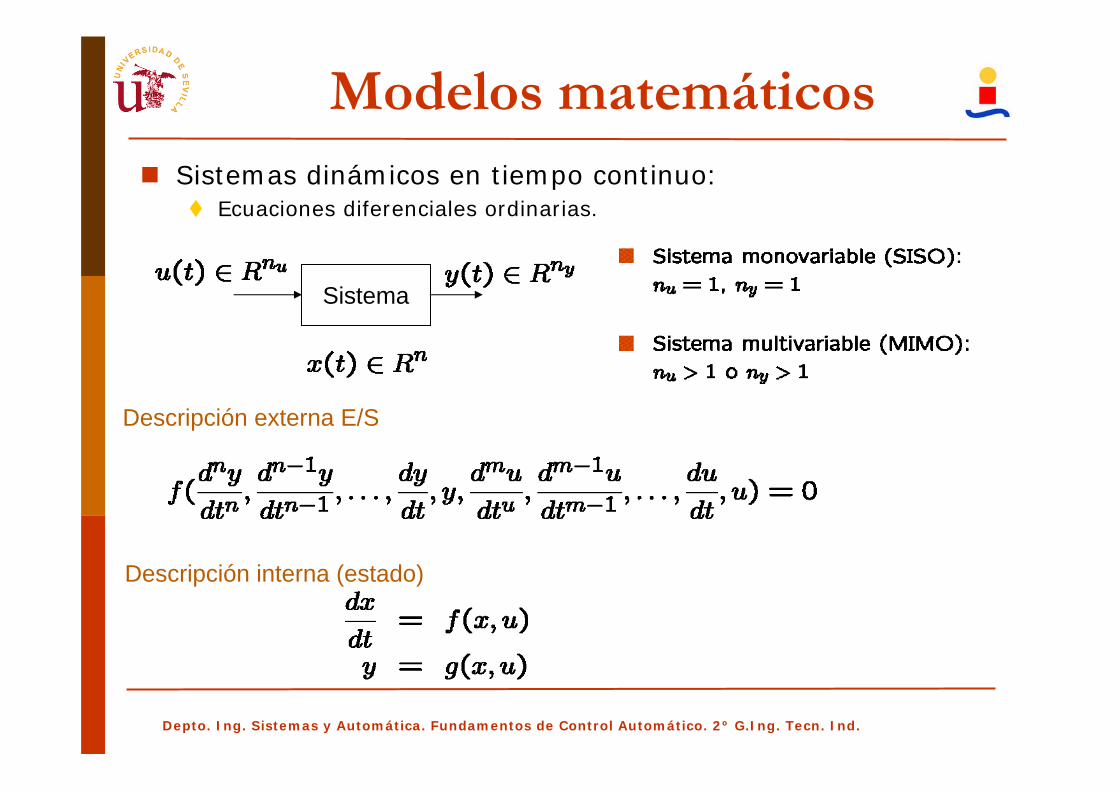
Modelos matemáticosSistemas dinámicos en tiempo continuo:
Ecuaciones diferenciales ordinarias.
Descripción externa E/S
Descripción interna (estado)
Sistema
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelos matemáticos
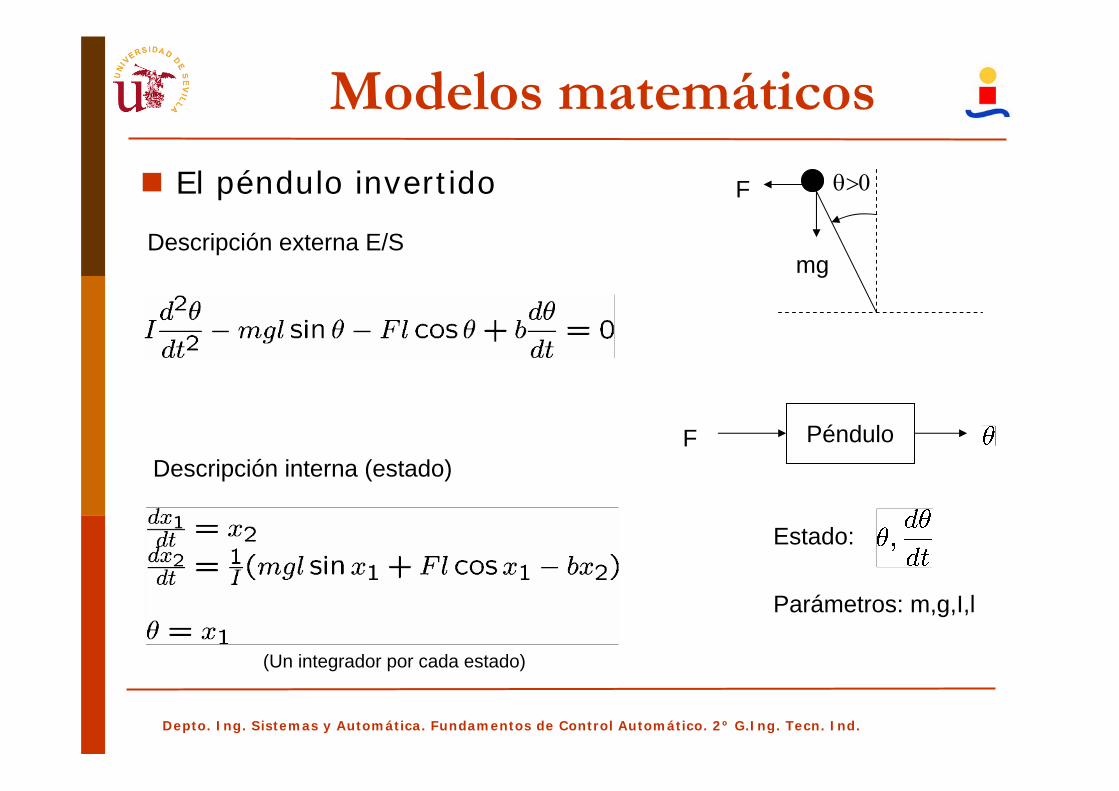
El péndulo invertido θ>0F
mgDescripción externa E/S
Descripción interna (estado)PénduloF
Estado:
(Un integrador por cada estado)
Parámetros: m,g,I,l
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
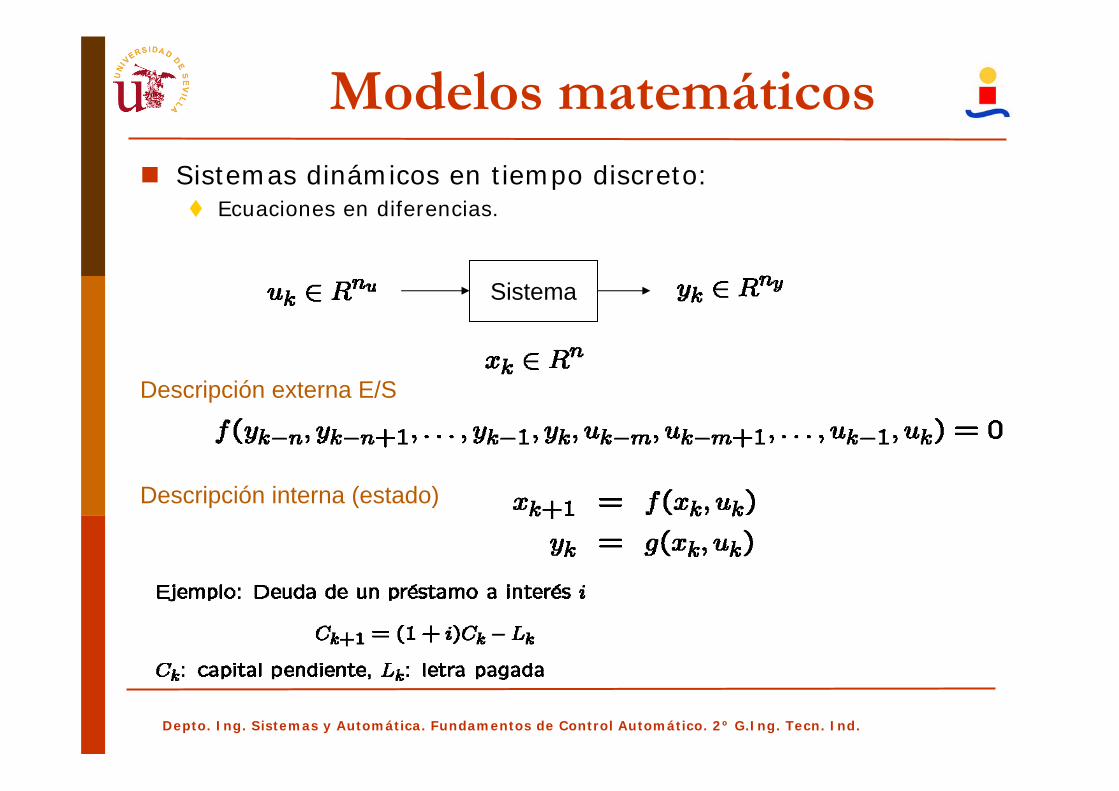
Modelos matemáticosSistemas dinámicos en tiempo discreto:
Ecuaciones en diferencias.
Sistema
Descripción externa E/S
Descripción interna (estado)
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelado matemático de sistemas
25
Ecuaciones que permiten obtener los modelos paramétricos:
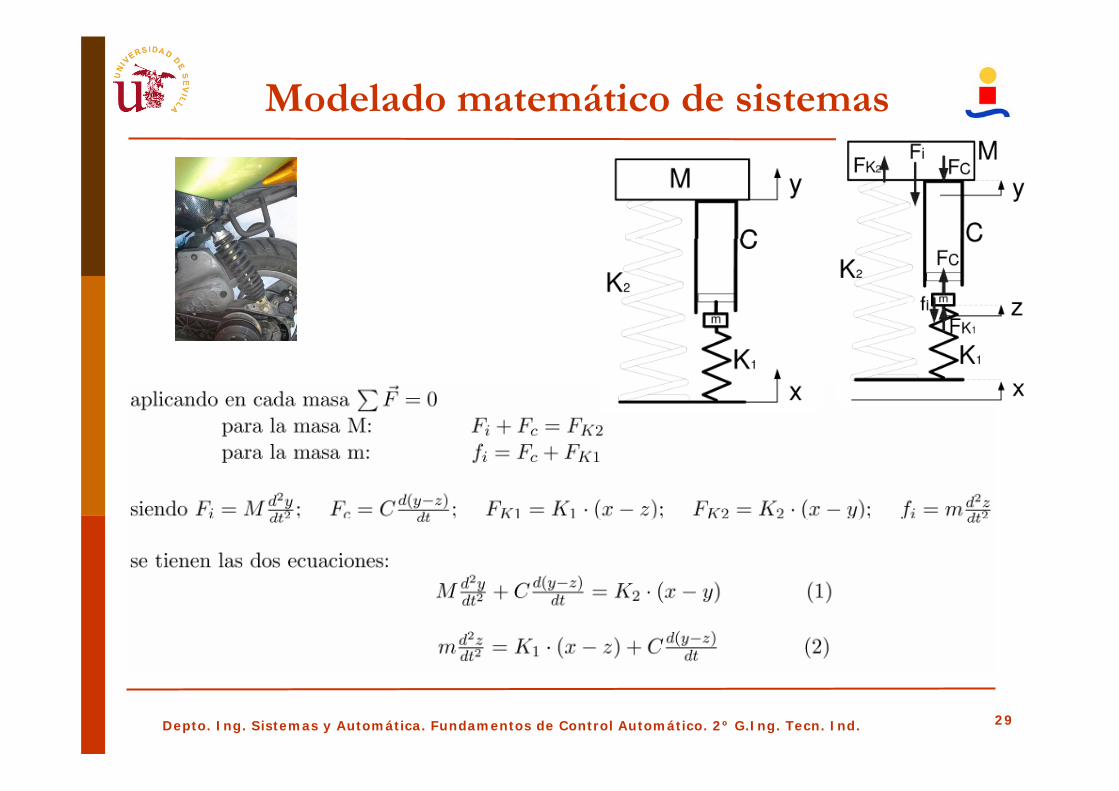
Ecuaciones de los fenómenos elementalesEjemplo: un sistema mecánico• ec. que relaciona el desplazamiento de los extremos de un muelle
con la fuerza aplicada al mismo.• ec. que relaciona las velocidades de los extremos de un
amortiguador con la fuerza aplicada al mismo.• ec. que relaciona las aceleraciones que experimenta una masa con
la fuerza aplicada a la misma.
Ecuaciones de balance• suma de fuerzas igual a cero en cada elemento del sistema.
Sistema de EcuacionesAlgebráicasDiferenciales

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Elementos idealesResistencia
Bobina
Condensador
Ecuaciones de Kirchoff
Ri
v
Li
v
Ci
v
Nudo: Bucle:
Modelado matemático de sistemas
26
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
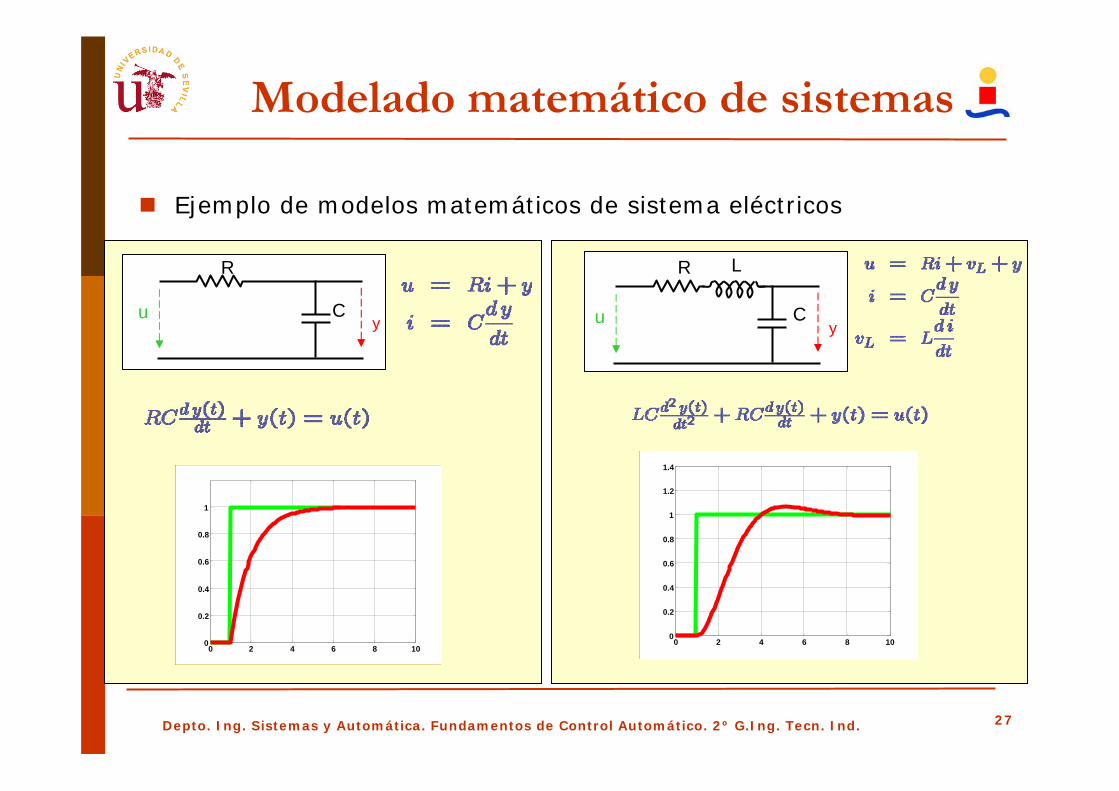
Ejemplo de modelos matemáticos de sistema eléctricos
u
R
Cy u
R
Cy
L
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Modelado matemático de sistemas
27
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
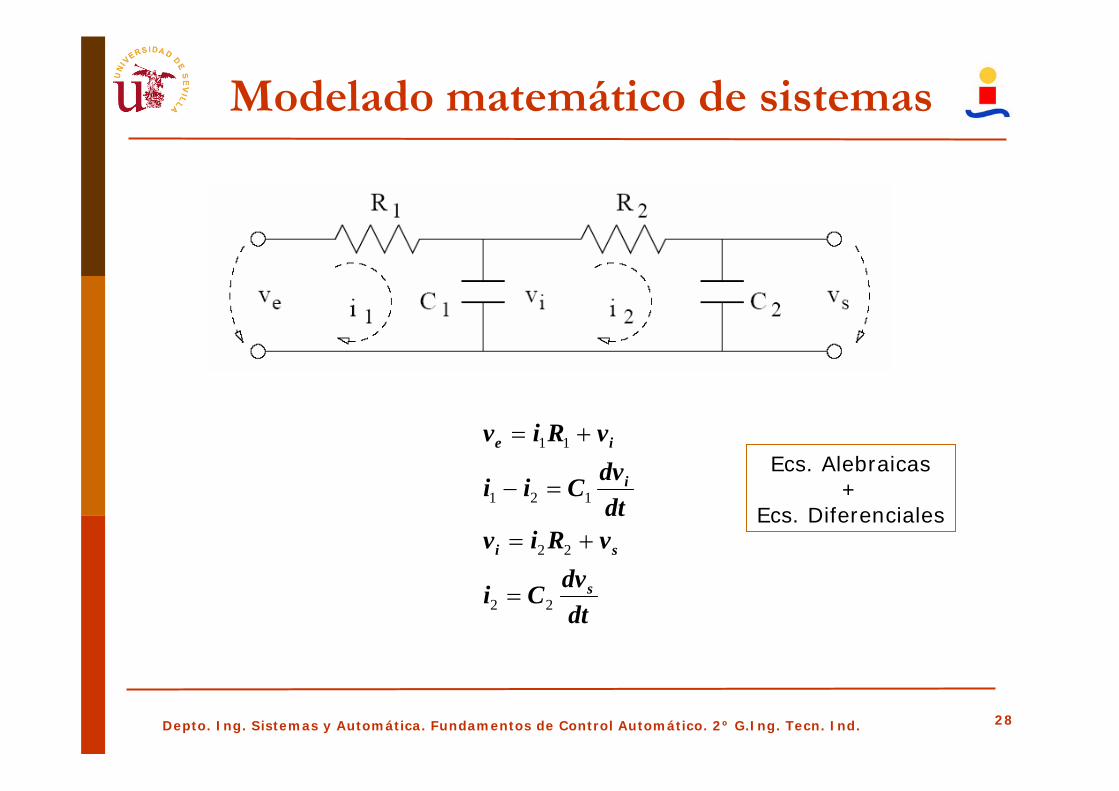
dtdvCi
vRivdtdvCii
vRiv
s
si
i
ie
22
22
121
11
=
+=
=−
+=
Modelado matemático de sistemas
28
Ecs. Alebraicas+
Ecs. Diferenciales
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Modelado matemático de sistemas
29
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
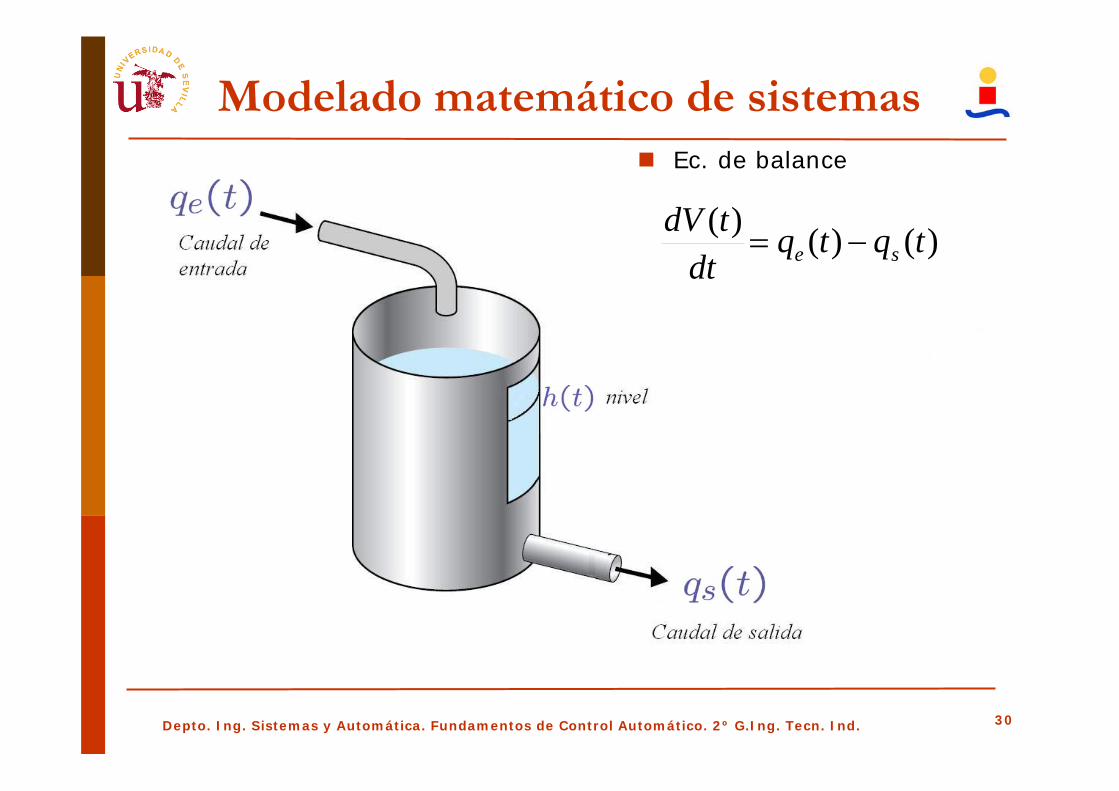
)()()( tqtqdt
tdVse −=
)()()( tqtqdt
tdVse −=
Ec. de balance
)()()( tqtqdt
tdVse −=
Modelado matemático de sistemas
30
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
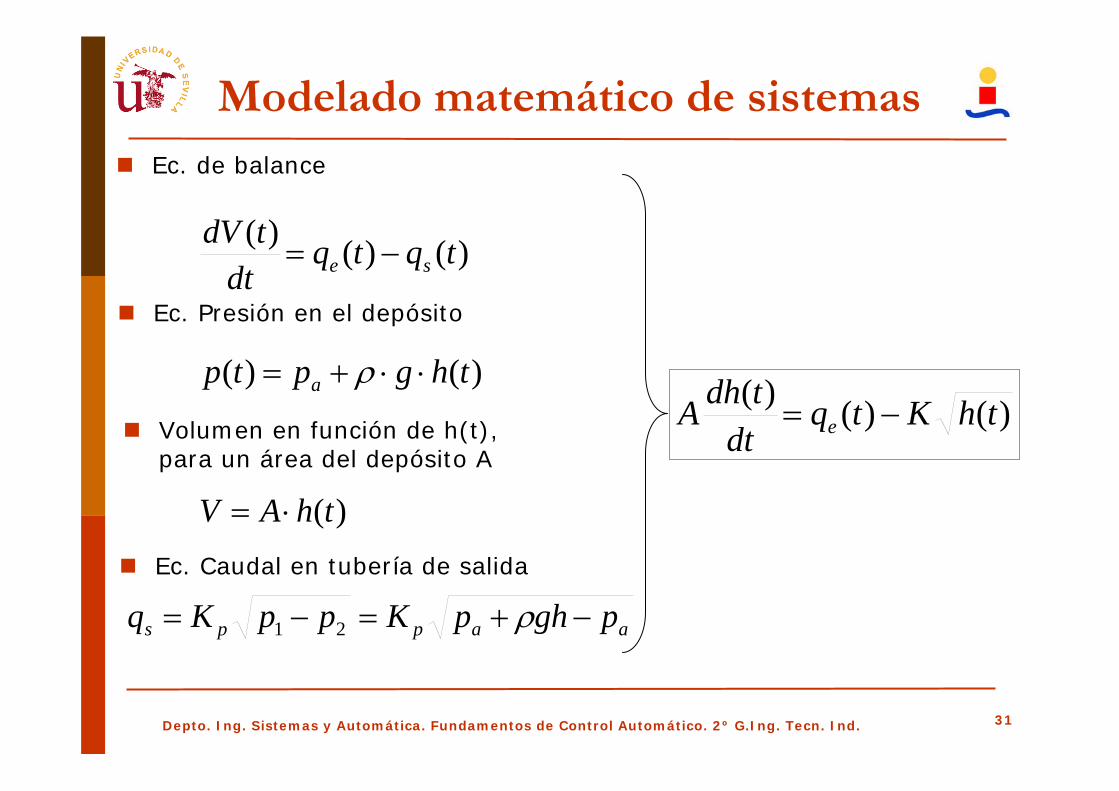
aapps pghpKppKq
thAV
−+=−=
⋅=
ρ21
)(
)()()( thKtqdt
tdhA e −=)()(
)()()(
thgptp
tqtqdt
tdV
a
se
⋅⋅+=
−=
ρ
Ec. de balance
Ec. Presión en el depósito
Volumen en función de h(t), para un área del depósito A
Ec. Caudal en tubería de salida
Modelado matemático de sistemas
31

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
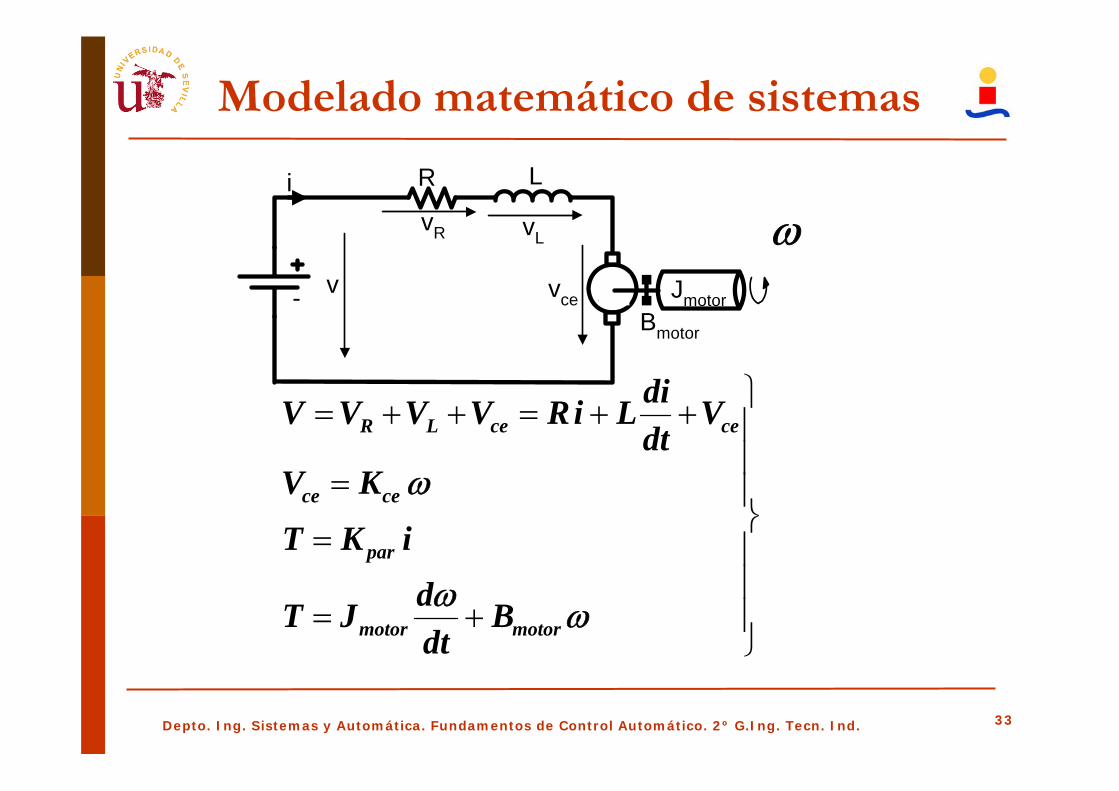
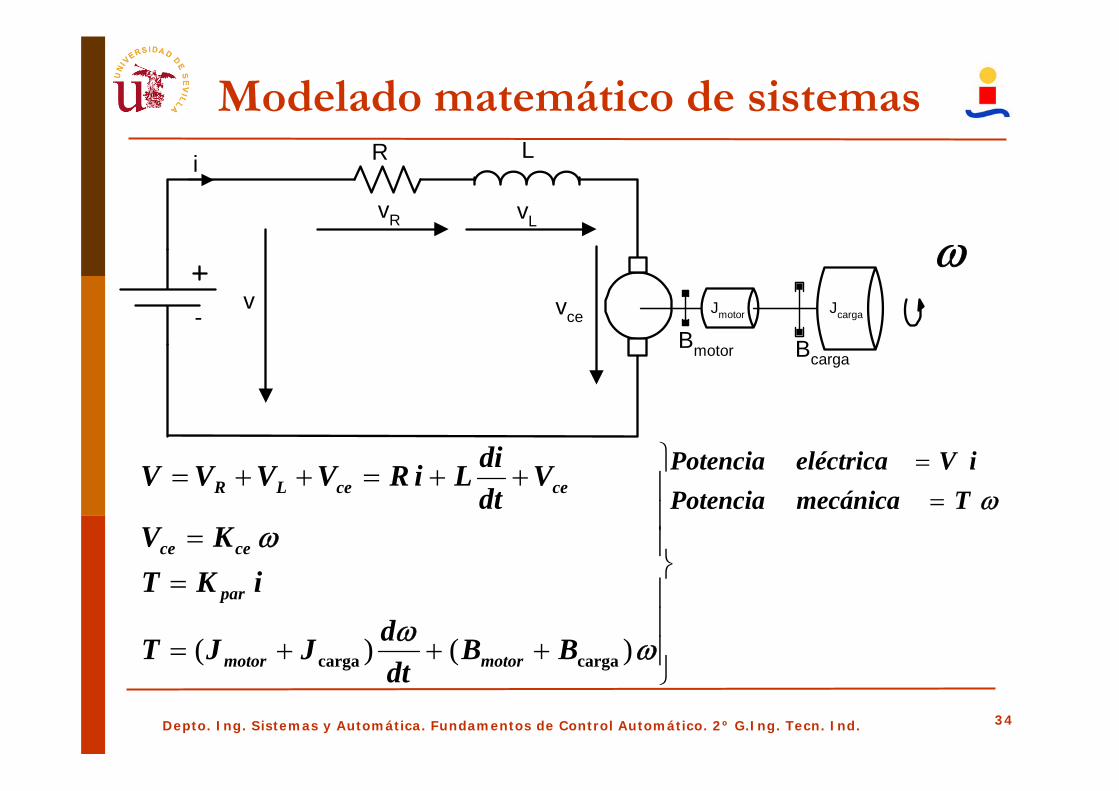
Motor de corriente continua:
Modelado matemático de sistemas
32
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
+=
=
=
++=++=
ωω
ω
motormotor
par
cece
ceceLR
BdtdJT
iKT
KV
VdtdiLiRVVVV
R L
vcev
vR vL
JmotorM
Bmotor
i
-
ω
Modelado matemático de sistemas
33
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
+++=
==
++=++=
ωω
ω
)()( cargacarga BBdtdJJT
iKTKV
VdtdiLiRVVVV
motormotor
par
cece
ceceLR
R L
vcev
vR vL
JmotorM Jcarga
Bmotor Bcarga
i
-
ω
ωTmecánicaPotenciaiVeléctricaPotencia
==
Modelado matemático de sistemas
34
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
35
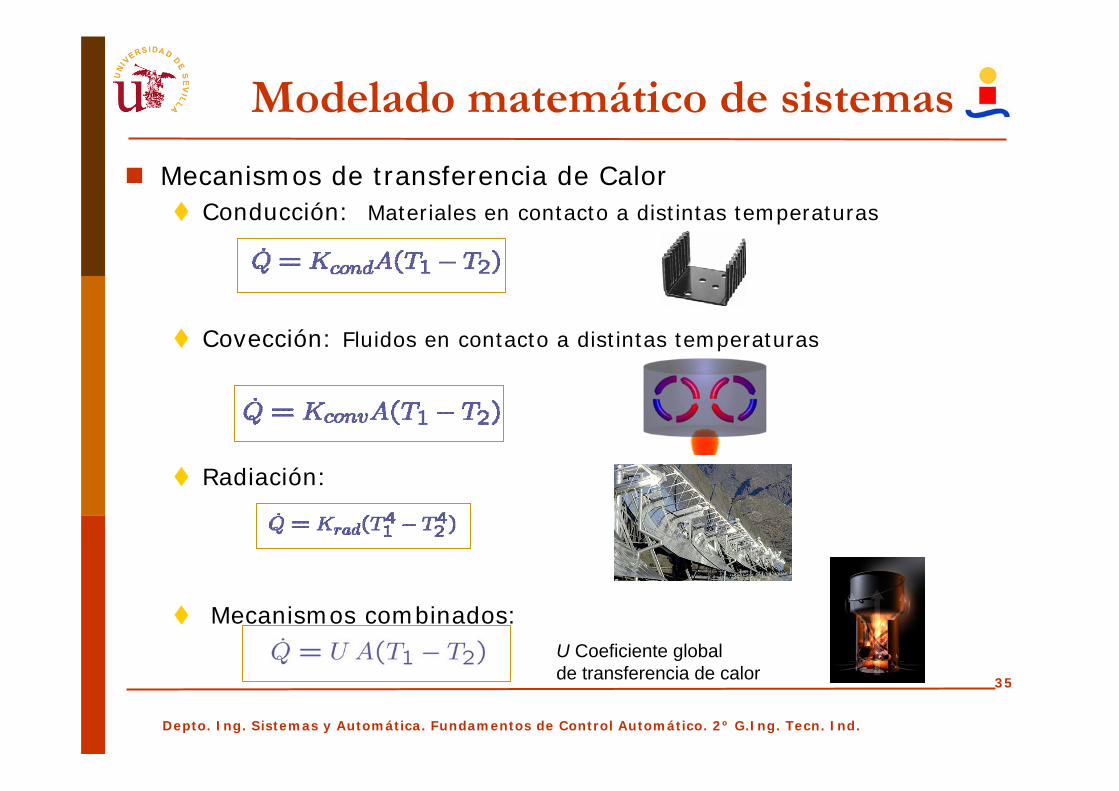
Mecanismos de transferencia de CalorConducción: Materiales en contacto a distintas temperaturas
Covección: Fluidos en contacto a distintas temperaturas
Radiación:
Mecanismos combinados:U Coeficiente global de transferencia de calor
Modelado matemático de sistemas
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
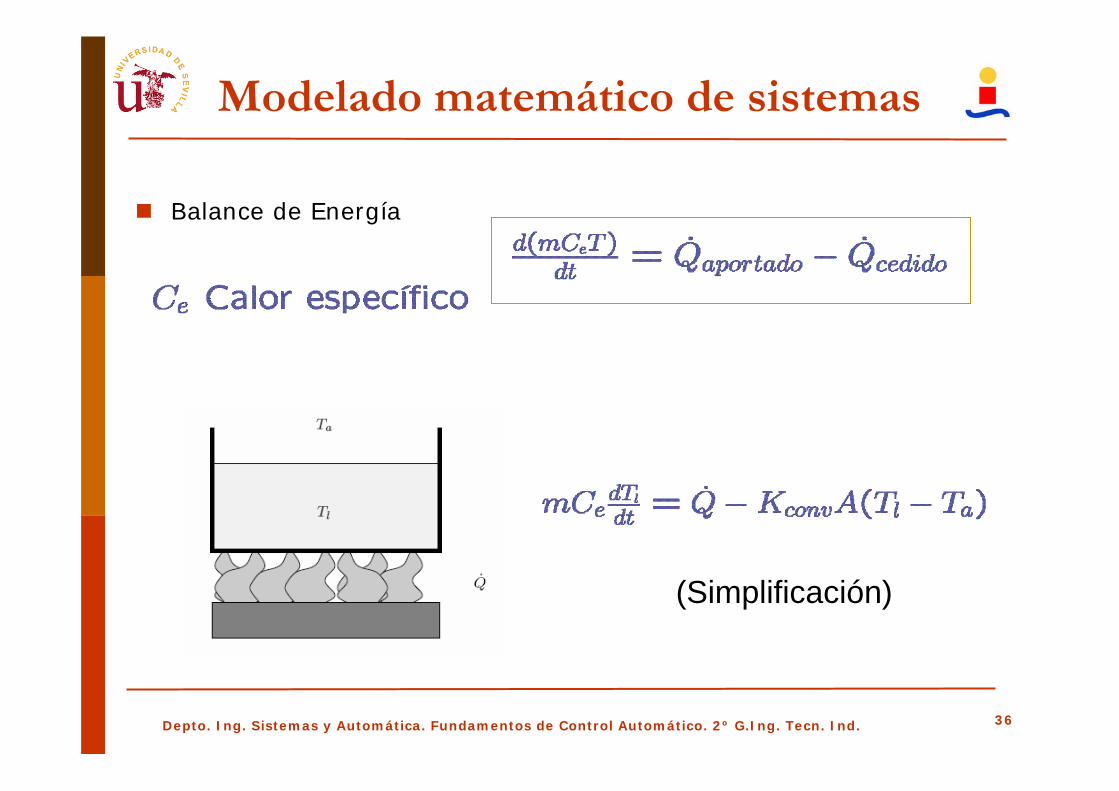
Balance de Energía
(Simplificación)
Modelado matemático de sistemas
36

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 37
Simulación de sistemasIntegración numérica de las ecuaciones diferenciales
Discretización del tiempo {t0, t1, t2,…} • Paso de integración
Determinación de las salidas {y0, y1, y2,…}
Ejemplo: método de Euler
Modelo
entradas salidas
condiciones iniciales
SIMULADOR
⎟⎟⎠
⎞⎜⎜⎝
⎛−= )()(1)( ty
AK
tqA
ty p&
⎟⎟⎠
⎞⎜⎜⎝
⎛−+= −−− 1k
p1k1kk y
AK
qA1hyy
Inicio: y0=y(0)Para k=1 hasta N
tk=k h
Fin
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
Tema 2: Representación y modelado de sistemas dinámicos
2.1 Señales y sistemas dinámicos
2.2 Modelado matemático de sistemas dinámicos
2.3 Régimen transitorio y permanente.
Característica estática de un sistema.
2.4 Sistemas dinámicos lineales y no lineales
2.5 Linealización
38
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
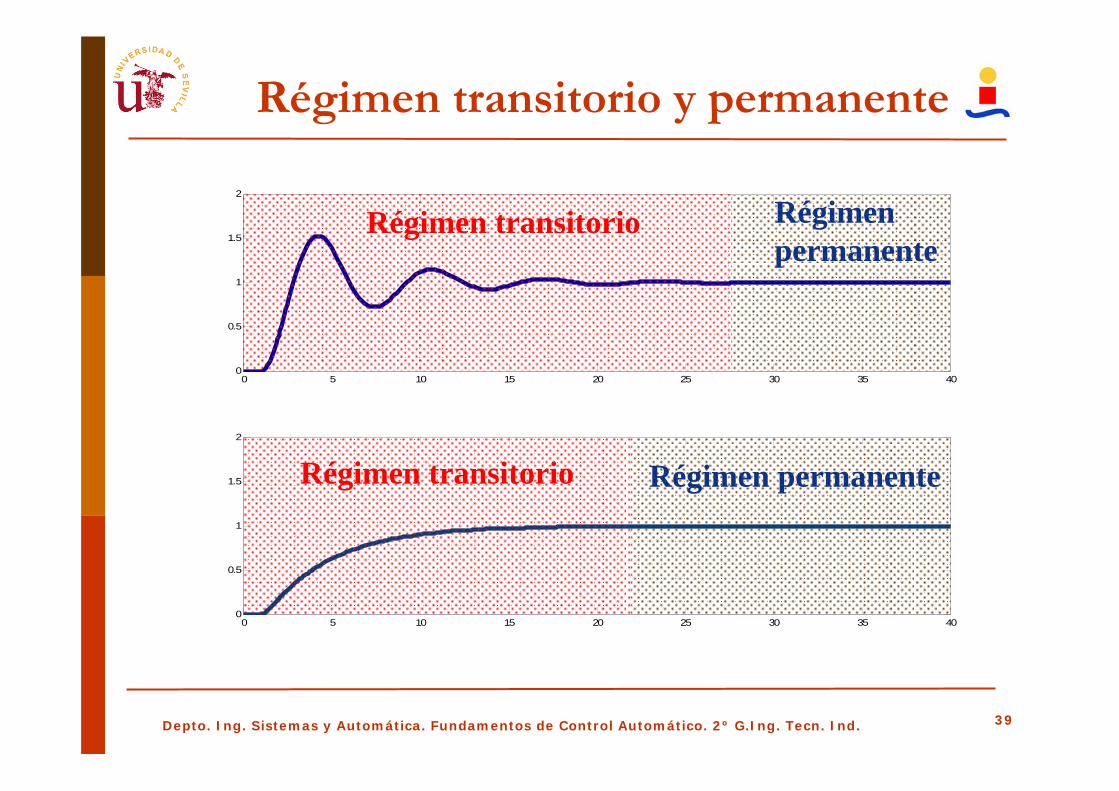
Régimen transitorio y permanente
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
Régimen permanente
Régimen transitorio
Régimen transitorio Régimen permanente
39
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
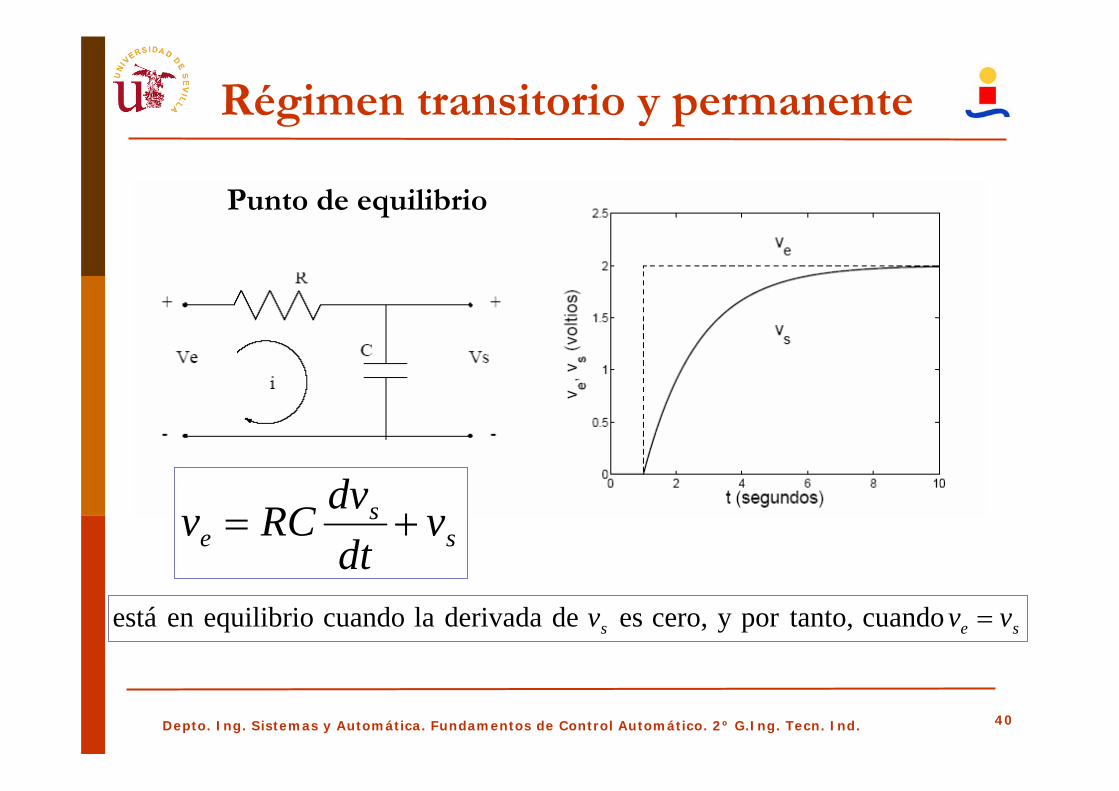
Punto de equilibrio
Régimen transitorio y permanente
40
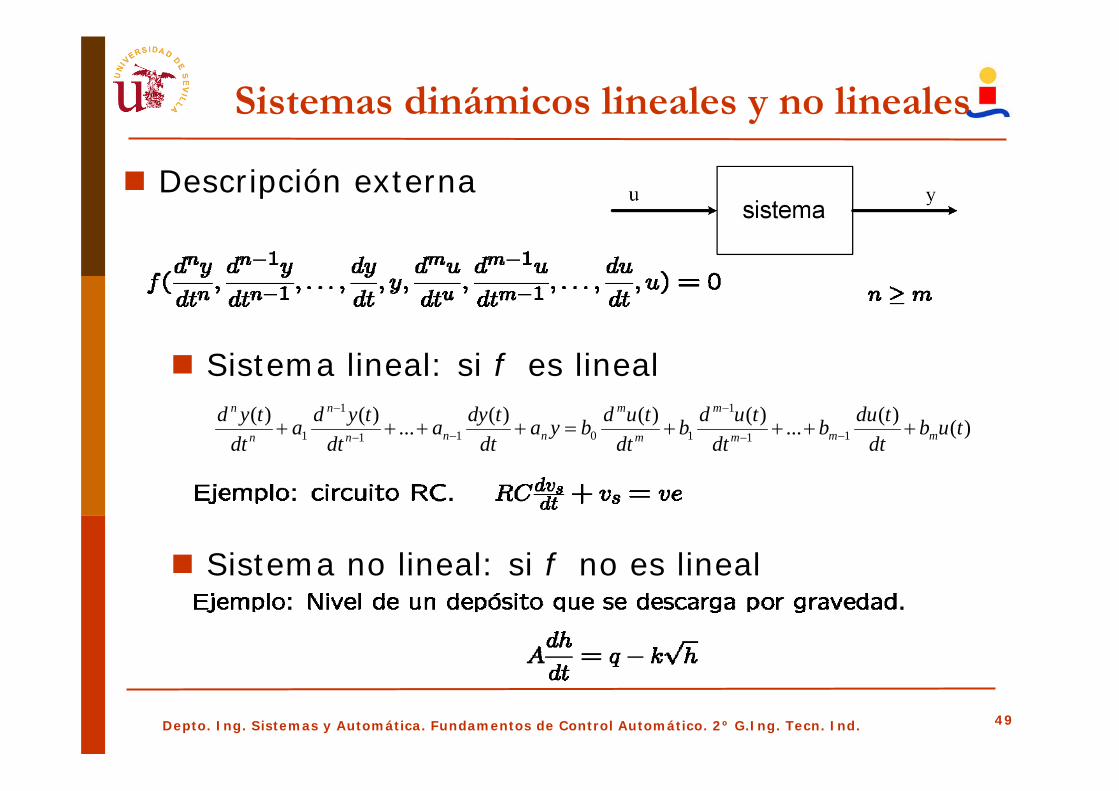
ss
e vdtdvRCv +=
ses vvv =cuandotanto,porycero,esdederivadalacuandoequilibrioenestá
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 41
Unicidad del punto de equilibrio para sistemas lineales:
•Para una entrada dada, por ejemplo ve= 1 voltio, el sistema evolucionará hasta alcanzar un único punto de equilibrio que corresponde a una salida vs=1 voltio
•Si se aplican a la entrada, por ejemplo ve= 2 voltios, el sistema evolucionará hasta conseguir un punto de equilibrio que corresponde a una salida vs=2 voltios
•Para una entrada dada sólo existe un único punto de equilibrio
Régimen transitorio y permanente
ss
e vdtdvRCv +=

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Característica Estática
42
Relación entre la entrada y la salida en régimen permanente.
Ejemplo:
ve
vs
en régimen permanente:
ss
e vdtdvRCv +=
se vv =
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
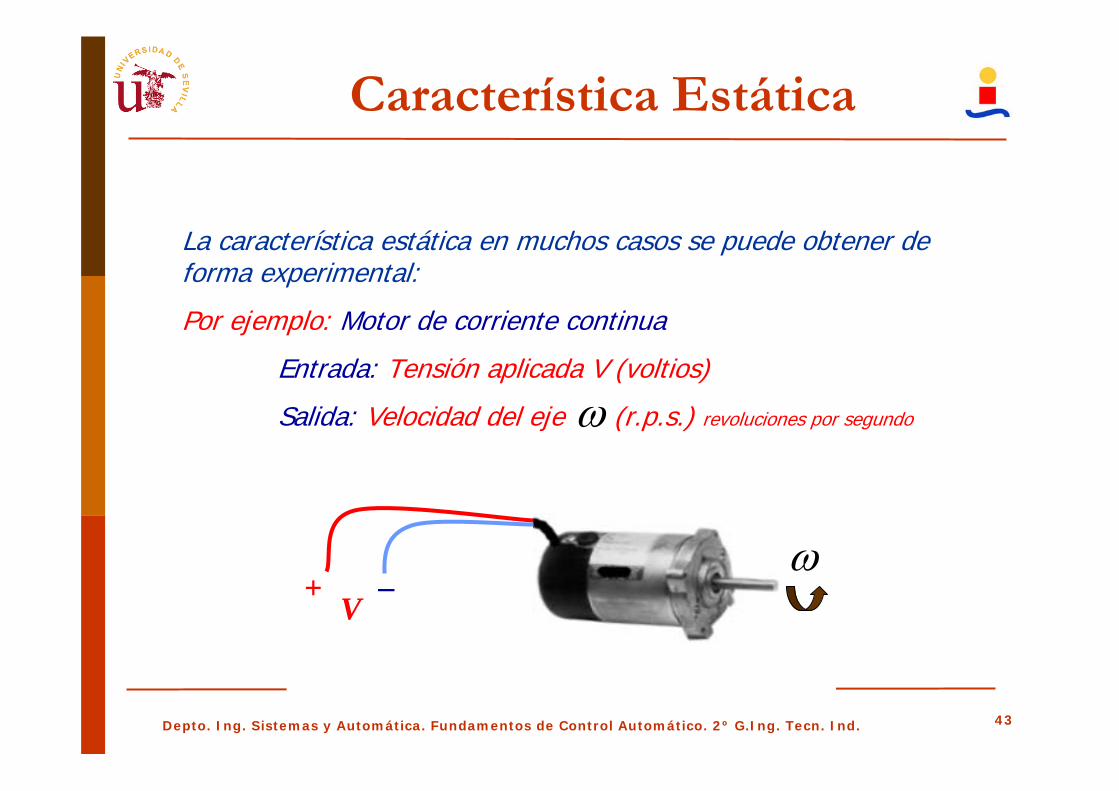
Característica Estática
43
La característica estática en muchos casos se puede obtener de forma experimental:
Por ejemplo: Motor de corriente continua
Entrada: Tensión aplicada V (voltios)
Salida: Velocidad del eje (r.p.s.) revoluciones por segundo
+ _ V
ω
ω

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Característica Estática
44
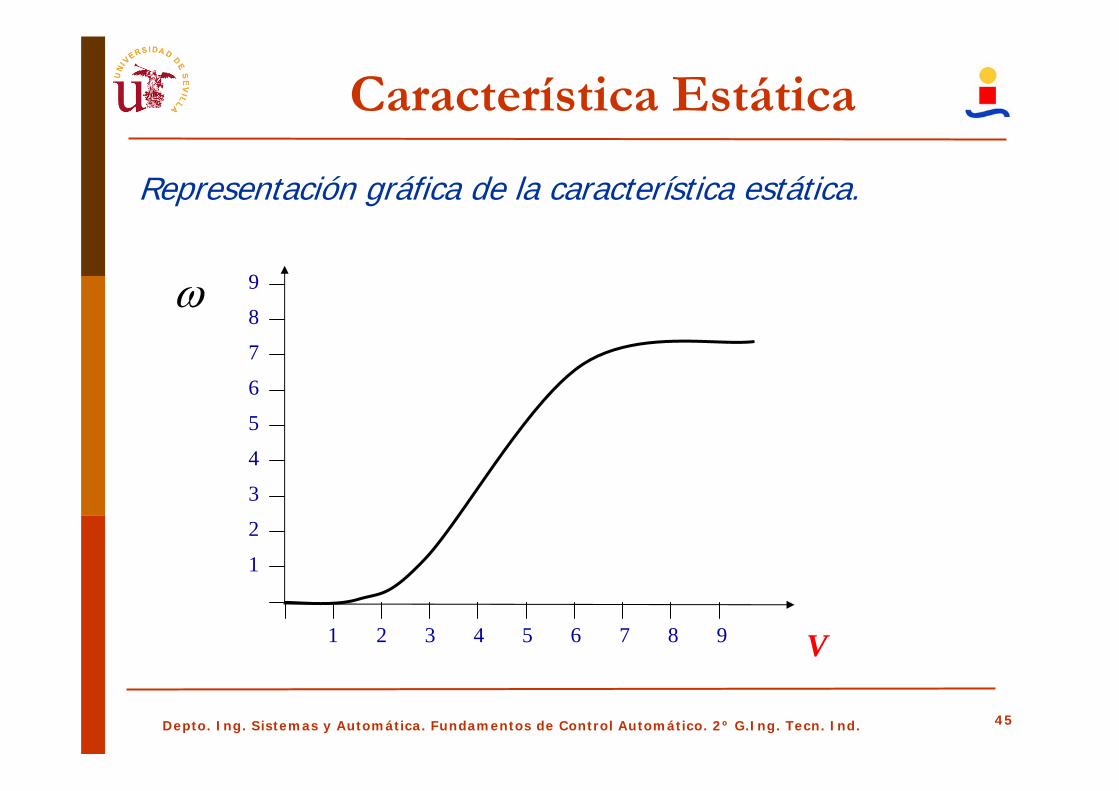
V(v) R(r.p.s.)
0 0
1 0
2 0.2
3 1.3
4 3.2
5 5.1
6 6.5
7 7.2
8 7.4
9 7.4
Ensayo aplicando distintas tensiones de entrada y midiendo las revoluciones en régimen permanente:
R+ _ V
ω
ω
ω
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Característica Estática
45
Representación gráfica de la característica estática.
1 2 3 4 5 6 7 8 9
1
2
3
4
5
6
7
8
9
V
ω
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
Tema 2: Representación y modelado de sistemas dinámicos
2.1 Señales y sistemas dinámicos
2.2 Modelado matemático de sistemas dinámicos
2.3 Régimen transitorio y permanente.
Característica estática de un sistema.
2.4 Sistemas dinámicos lineales y no lineales
2.5 Linealización
46

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Sistemas dinámicos lineales y no lineales
47
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
u1
y1
u2 y2
u1+u2
y1+y2
En un sistema lineal se cumple el Principio de Superposición

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 48
0 5 10 15 20 25 300
2
4
6
8
10
12
0 5 10 15 20 25 300
2
4
6
8
10
12
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
u1
u2 y2
ut=u1+u2
0 5 10 15 20 25 300
2
4
6
8
10
12
y1
yt=y1+y2/
El Principio de Superposición NO se cumple en un sistema no lineal
Sistemas dinámicos lineales y no lineales
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Sistemas dinámicos lineales y no lineales
49
)()(...)()()(...)()(11
1
1011
1
1 tubdt
tdubdt
tudbdt
tudbyadt
tdyadt
tydadt
tydmmm
m
m
m
nnn
n
n
n
++++=++++ −−
−
−−
−
Descripción externa
Sistema lineal: si f es lineal
Sistema no lineal: si f no es lineal
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Sistemas dinámicos lineales y no lineales
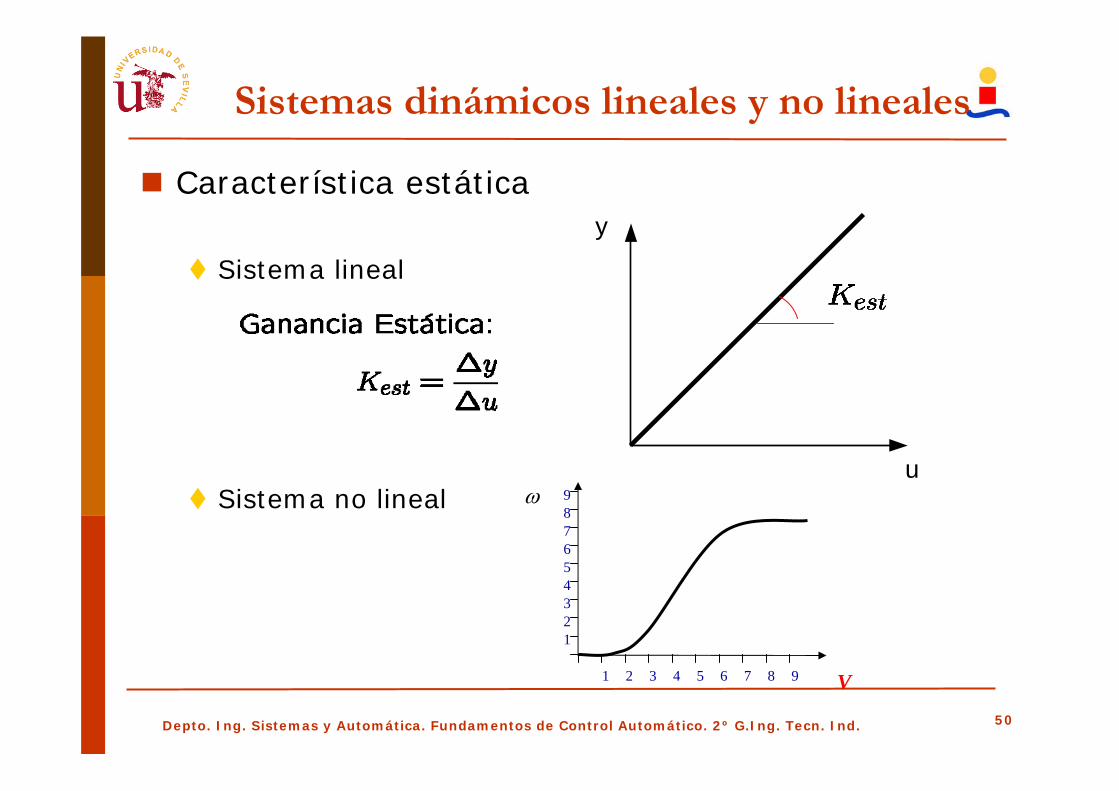
Característica estática
Sistema lineal
Sistema no lineal
50
u
y
1 2 3 4 5 6 7 8 9
123456789
V
ω
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
Tema 2: Representación y modelado de sistemas
dinámicos
2.1 Señales y sistemas dinámicos
2.2 Modelado matemático de sistemas dinámicos
2.3 Régimen transitorio y permanente.
Característica estática de un sistema.
2.4 Sistemas dinámicos lineales y no lineales
2.5 Linealización
51
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
Objetivo:
obtener modelos lineales aproximados a partir de modelos no
lineales
Punto de funcionamiento:
Punto de equilibrio en torno al que se linealiza
Propiedades:
Representa bien al sistema en una cierta zona en torno a un punto
de equilibrio.
Fuera de la zona de validez, el modelo linealizado tiene un error
demasiado grande.
52
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
x
y
xo
yo
dx
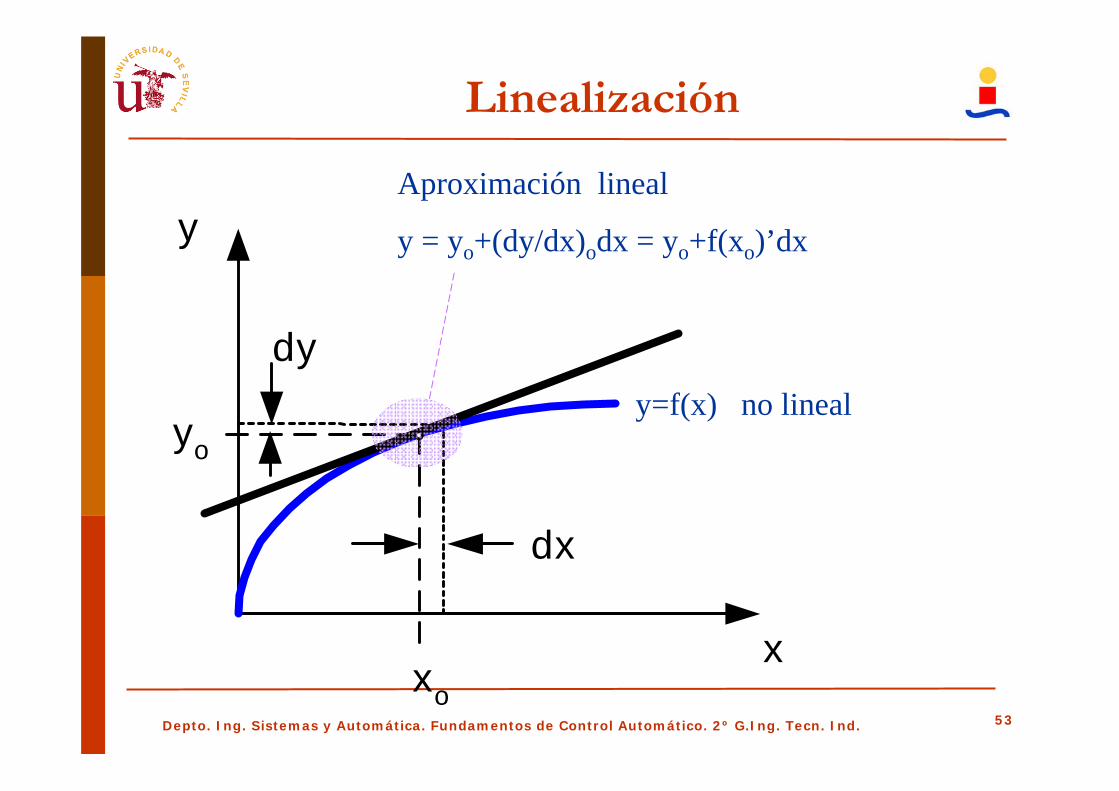
dyy=f(x) no lineal
Aproximación lineal
y = yo+(dy/dx)odx = yo+f(xo)’dx
53
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
54
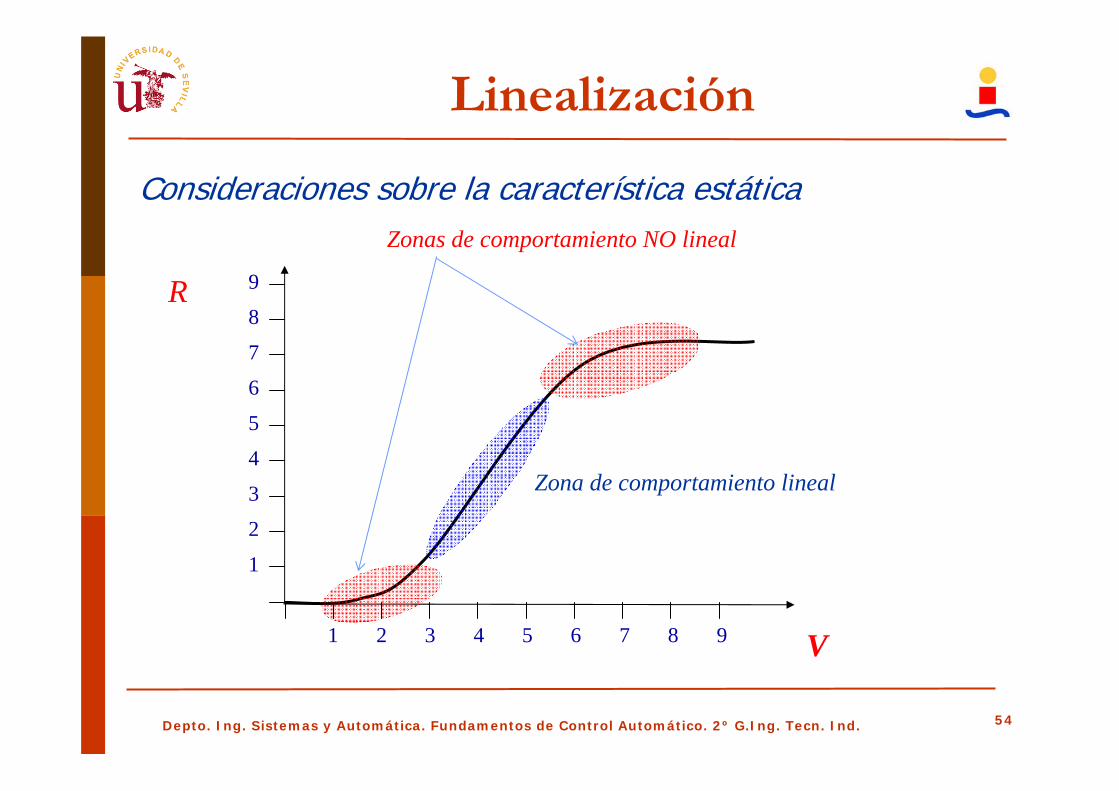
Consideraciones sobre la característica estática
1 2 3 4 5 6 7 8 9
1
2
3
4
5
6
7
8
9R
V
Zona de comportamiento lineal
Zonas de comportamiento NO lineal
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 55
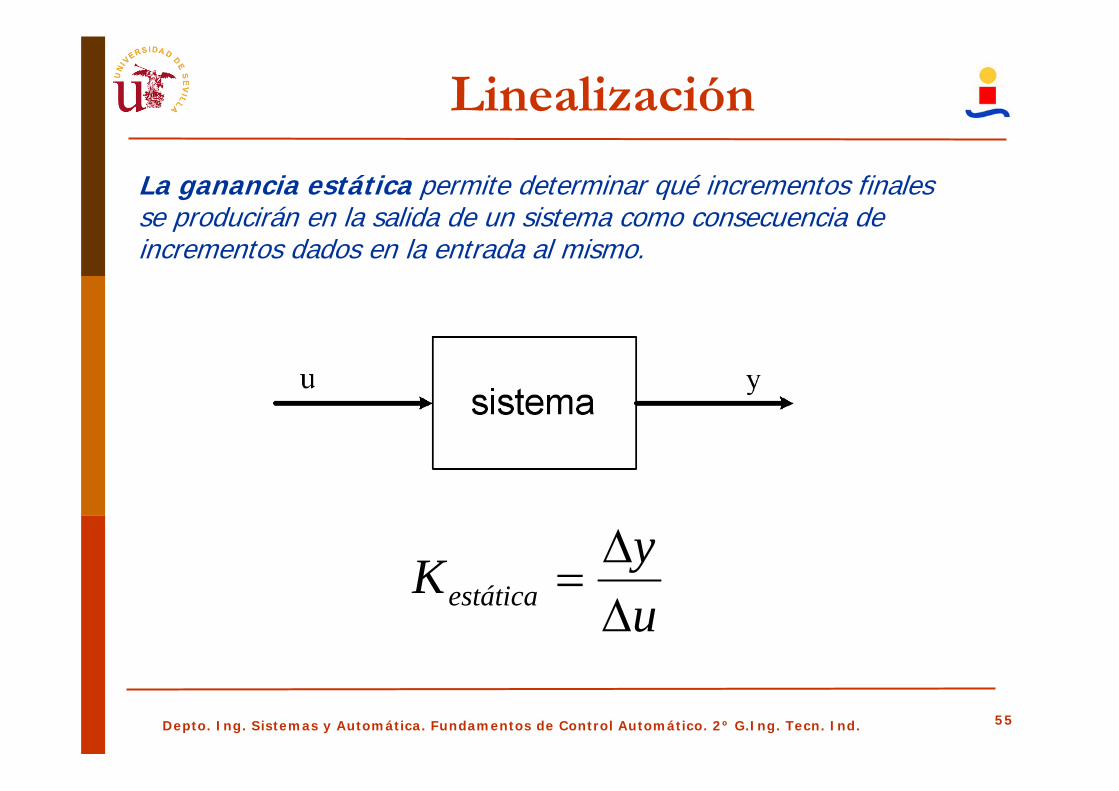
uyKestática Δ
Δ=
La ganancia estática permite determinar qué incrementos finales se producirán en la salida de un sistema como consecuencia de incrementos dados en la entrada al mismo.
Linealización
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 56
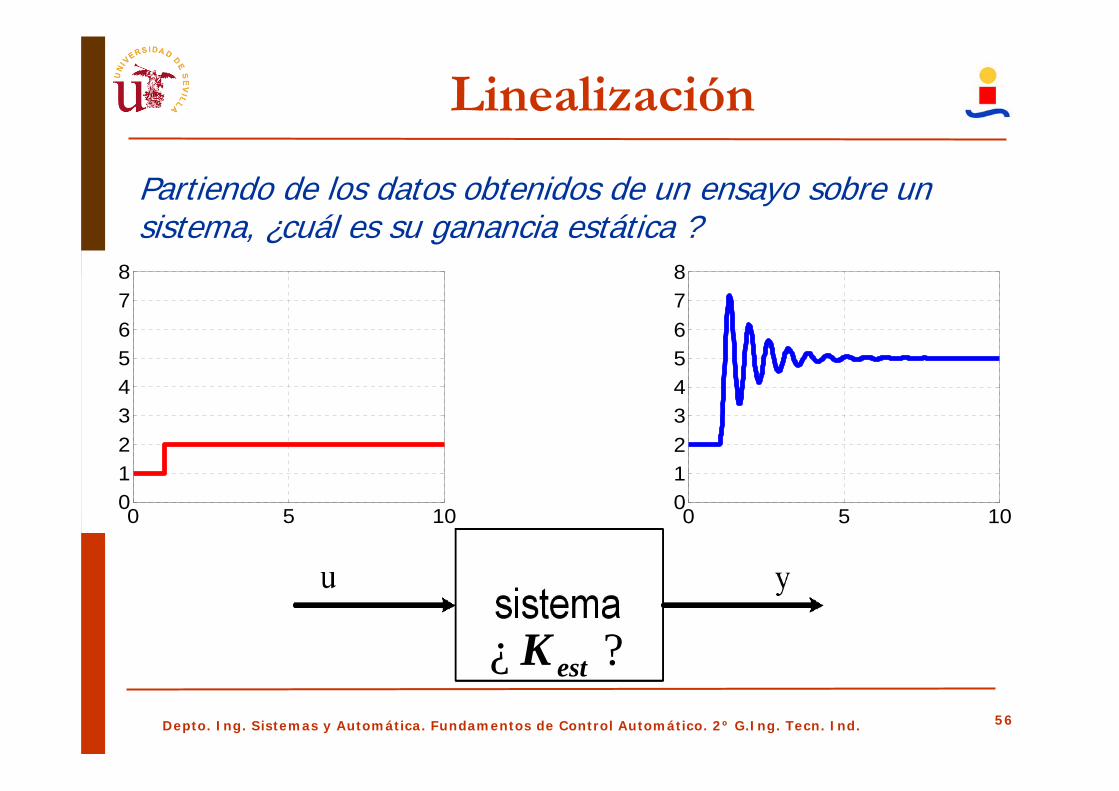
0 5 10012345678
Partiendo de los datos obtenidos de un ensayo sobre un sistema, ¿cuál es su ganancia estática ?
0 5 10012345678
?¿ estK
Linealización
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 57
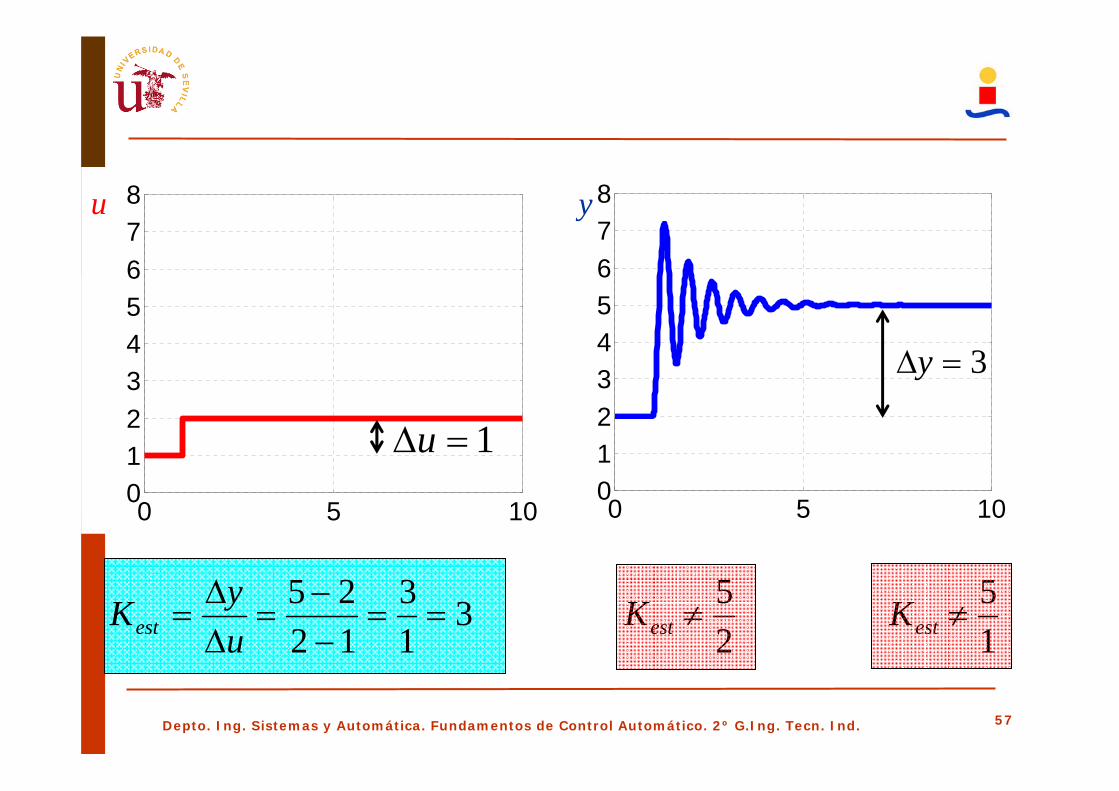
1=Δu
0 5 10012345678
0 5 10012345678u y
3=Δy
1=Δu
15
253
13
1225
≠≠==−−
=ΔΔ
= estestest KKuyK
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 58
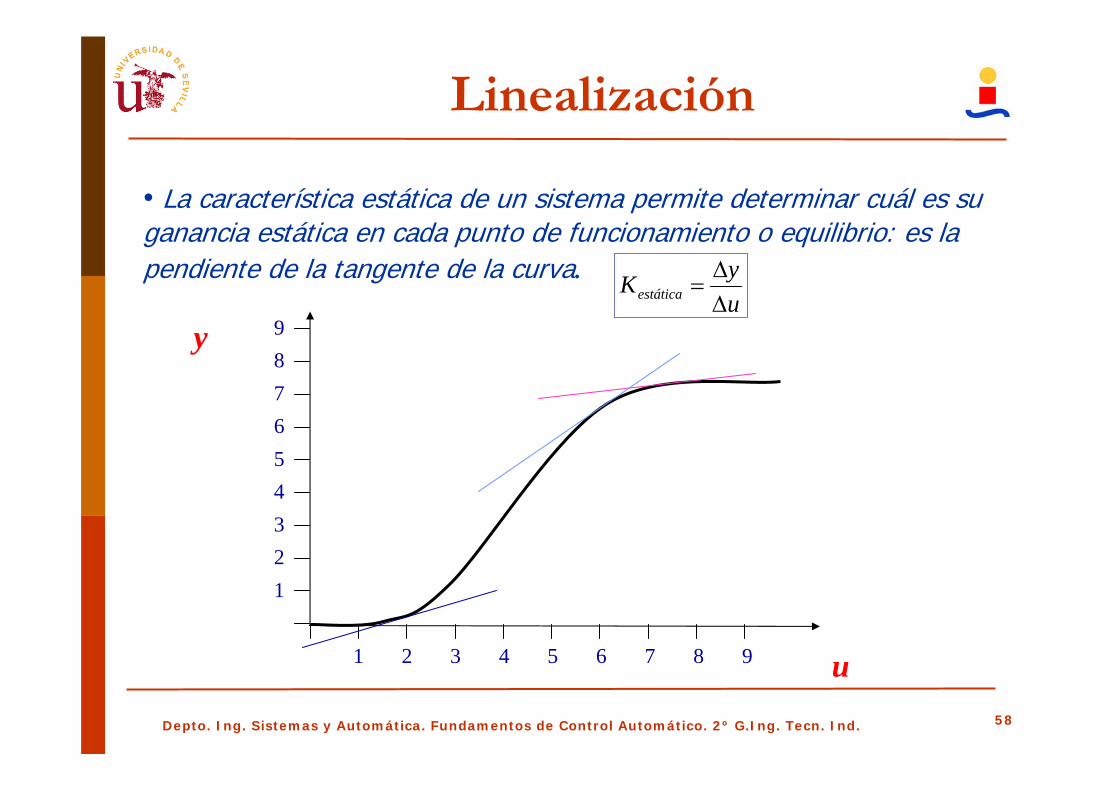
• La característica estática de un sistema permite determinar cuál es su ganancia estática en cada punto de funcionamiento o equilibrio: es la pendiente de la tangente de la curva.
1 2 3 4 5 6 7 8 9
123456789y
u
uyKestática Δ
Δ=
Linealización
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 59
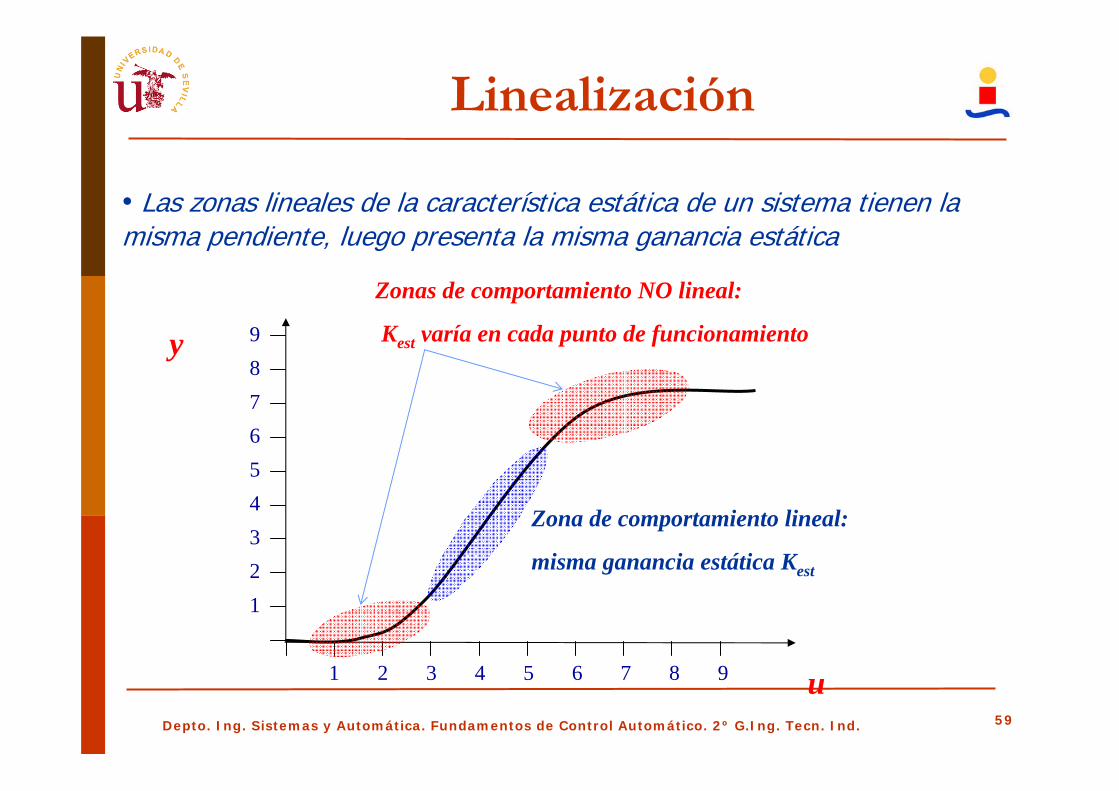
• Las zonas lineales de la característica estática de un sistema tienen la misma pendiente, luego presenta la misma ganancia estática
1 2 3 4 5 6 7 8 9
123456789y
u
Zona de comportamiento lineal:
misma ganancia estática Kest
Zonas de comportamiento NO lineal:
Kest varía en cada punto de funcionamiento
Linealización
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
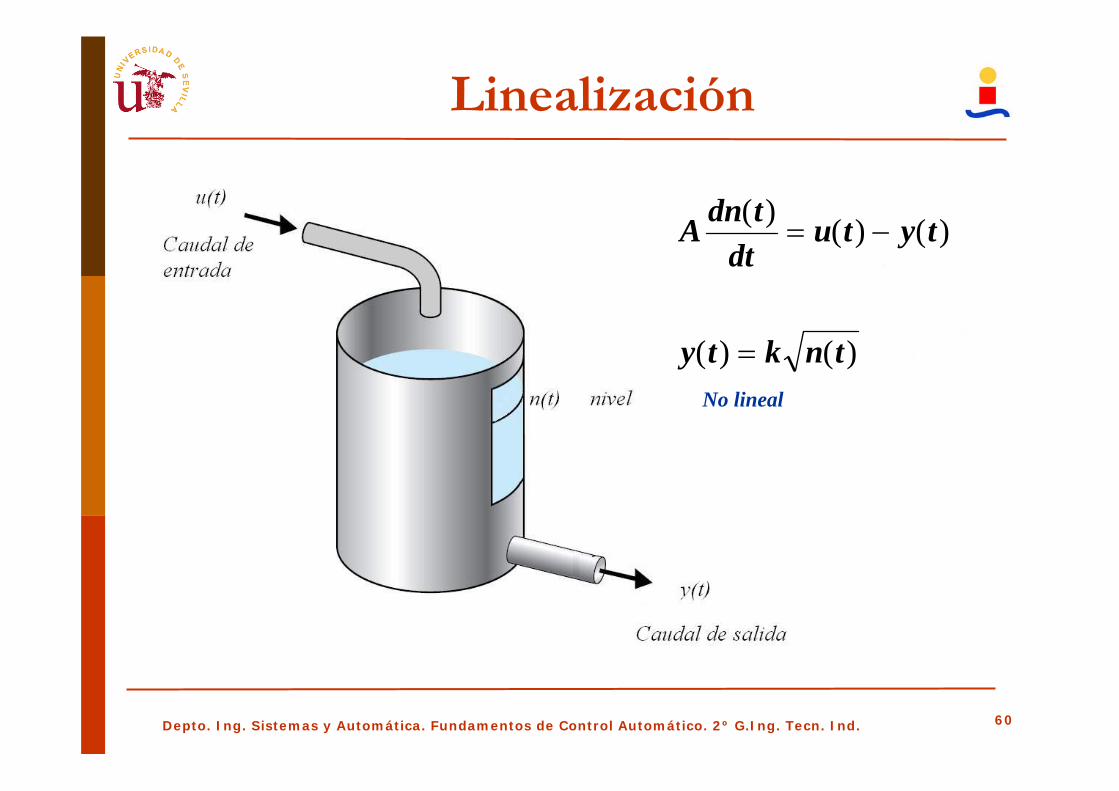
Linealización
)()(
)()()(
tnkty
tytudt
tdnA
=
−=
No lineal
60
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
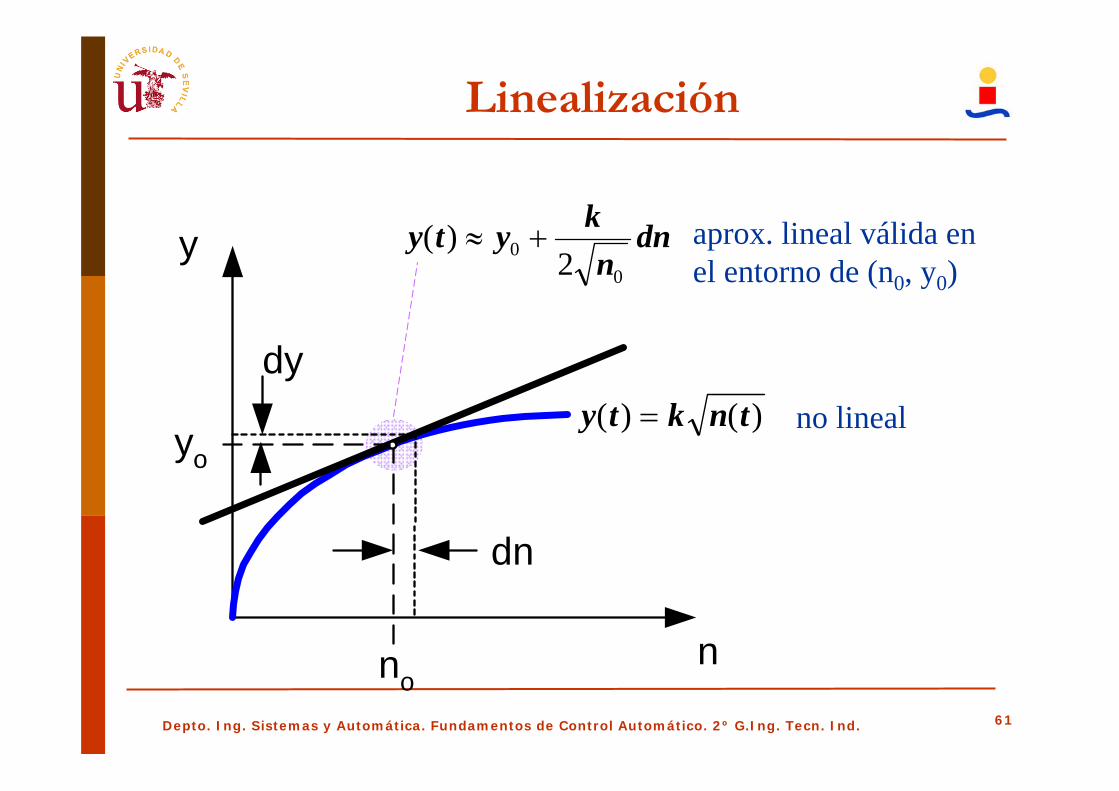
Linealización
61
dnn
kyty0
0 2)( +≈
no lineal
aprox. lineal válida en el entorno de (n0, y0)
)()( tnkty =
n
y
no
yo
dn
dy

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
62
Punto de Funcionamiento
Definiendo variables incrementales
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
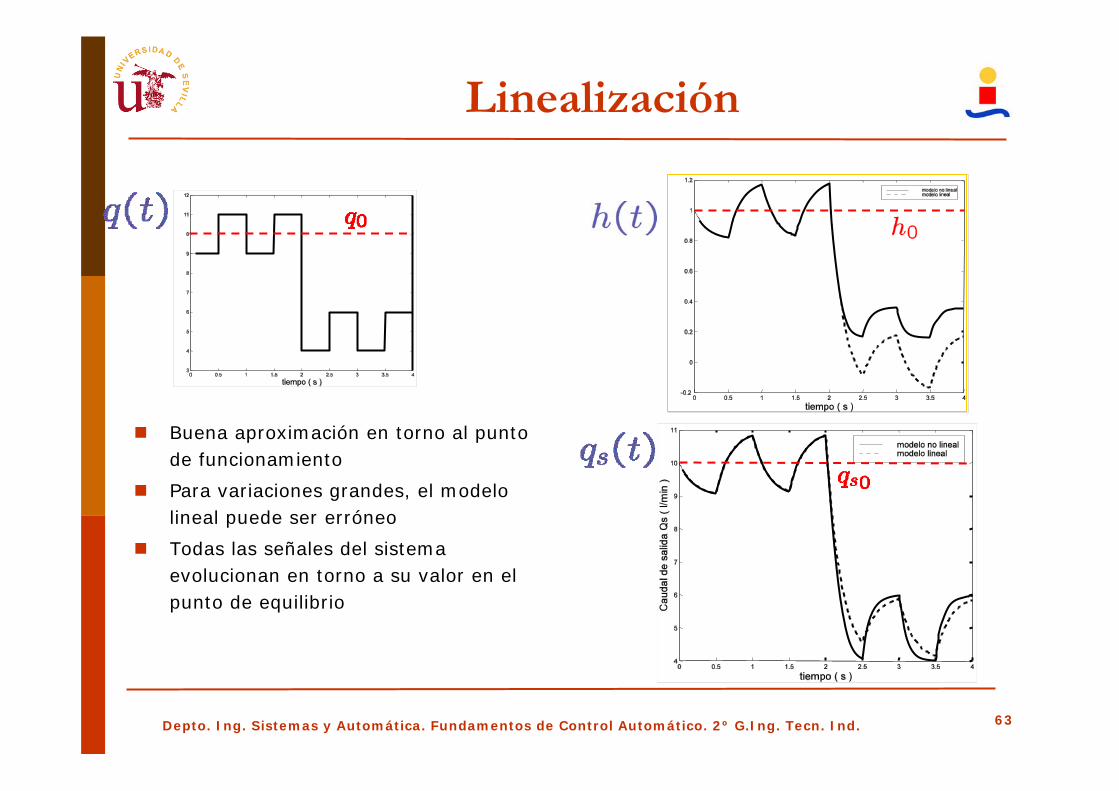
63
Buena aproximación en torno al punto de funcionamiento
Para variaciones grandes, el modelo lineal puede ser erróneo
Todas las señales del sistema evolucionan en torno a su valor en el punto de equilibrio
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
64
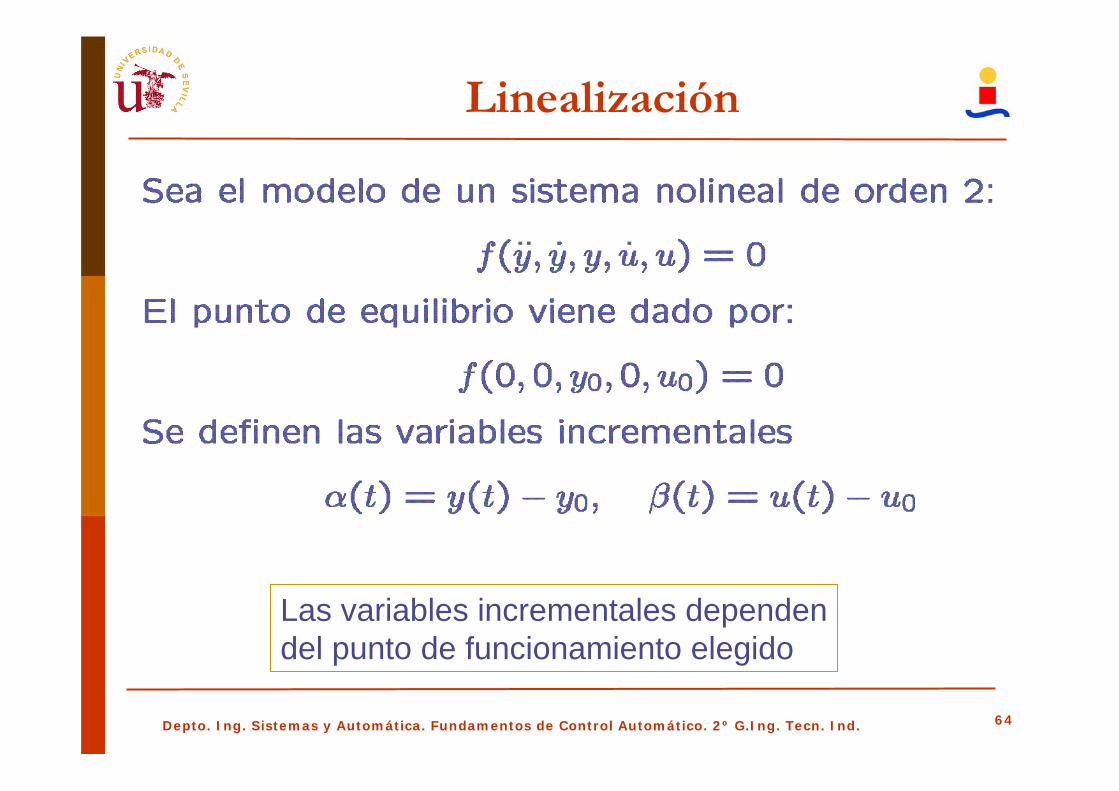
Las variables incrementales dependendel punto de funcionamiento elegido
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
65
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Linealización
66


















