
TD Cric électrique - Systeme VisEcrou
15
Cric électrique – Système Vis/Ecrou Transmettre S.I TD Pr :HAFIT Durée : 4 h Nom : …………………………… Prénom : ……………………… Date: …… / …… / …… Classe: …………………… Note : /2 0 Mise en situation LIRE la présentation du système sur le portail multimédia. Etape 1 : Analyse fonctionnelle du système Q1. COMPLETER l’actigramme A0 du point de vue utilisateur en phase de fonctionnement du cric électrique : / 0,75 pt Q2. A l’aide du FAST (voir portail multimédia), COMPLETER la chaine de transmission de puissance en indiquant les solutions technologiques intervenant dans cette chaine. TRANSFORMER l’énergie électrique en énergie mécanique Cric électrique ……………………… ……………………… ……………………………………………………… ……………………………………………………… ……… A-0 ……………………… ……………………… …………………………… W R E …………………………… …………………………… Page 1/15
-
Upload
abdul-el-sabio -
Category
Documents
-
view
541 -
download
9
Transcript of TD Cric électrique - Systeme VisEcrou

Cric électrique – Système Vis/EcrouTransmettre S.I TD Pr :HAFIT
Durée :4 h
Nom : ……………………………
Prénom : ………………………
Date: …… / …… / ……
Classe: ……………………
Note :
/20
Mise en situation
LIRE la présentation du système sur le portail multimédia.
Etape 1 : Analyse fonctionnelle du système
Q1. COMPLETER l’actigramme A0 du point de vue utilisateur en phase de fonctionnement du cric électrique :
/ 0,75 pt
Q2. A l’aide du FAST (voir portail multimédia), COMPLETER la chaine de transmission de puissance en indiquant les solutions technologiques intervenant dans cette chaine.
TRANSFORMER l’énergie électrique en
énergie mécanique
Cric électrique
………………………
………………………
…………………………………
…………………………………
…………………………………
……………… A-0
………………………
………………………
……………………………
W R E
……………………………
……………………………
Moteur électrique
Véhicule
Sol
Page 1/12

Cric électrique – Système Vis/EcrouTransmettre S.I TD Pr :HAFIT
Durée :4 h
Nom : ……………………………
Prénom : ………………………
Date: …… / …… / ……
Classe: ……………………
Note :
/20
/ 0,75 pt
Page 2/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Etape 2 : Analyse cinématique du mécanisme de levage
Q3. COMPLETER les classes d’équivalences ci-dessous puis les COLORIER sur le DT01:
Classe d’équivalencerepère(s) de(s) pièce(s) composant la classe
d’équivalence
E1 (Gris){01 ;
……………………………………………………………}
E2 (Bleu){02 ;
……………………………………………………………}
E3 (Vert clair){03 ;
……………………………………………………………}
E4 (Rouge){…………………………………………………………
…………}
E5 (Rose){…………………………………………………………
…………}
E6 (Orange){…………………………………………………………
…………}
E7 (Marron){…………………………………………………………
…………}
E8 (Vert foncé){…………………………………………………………
…………}
E9 (Violet){…………………………………………………………
…………}
/ 3 pts
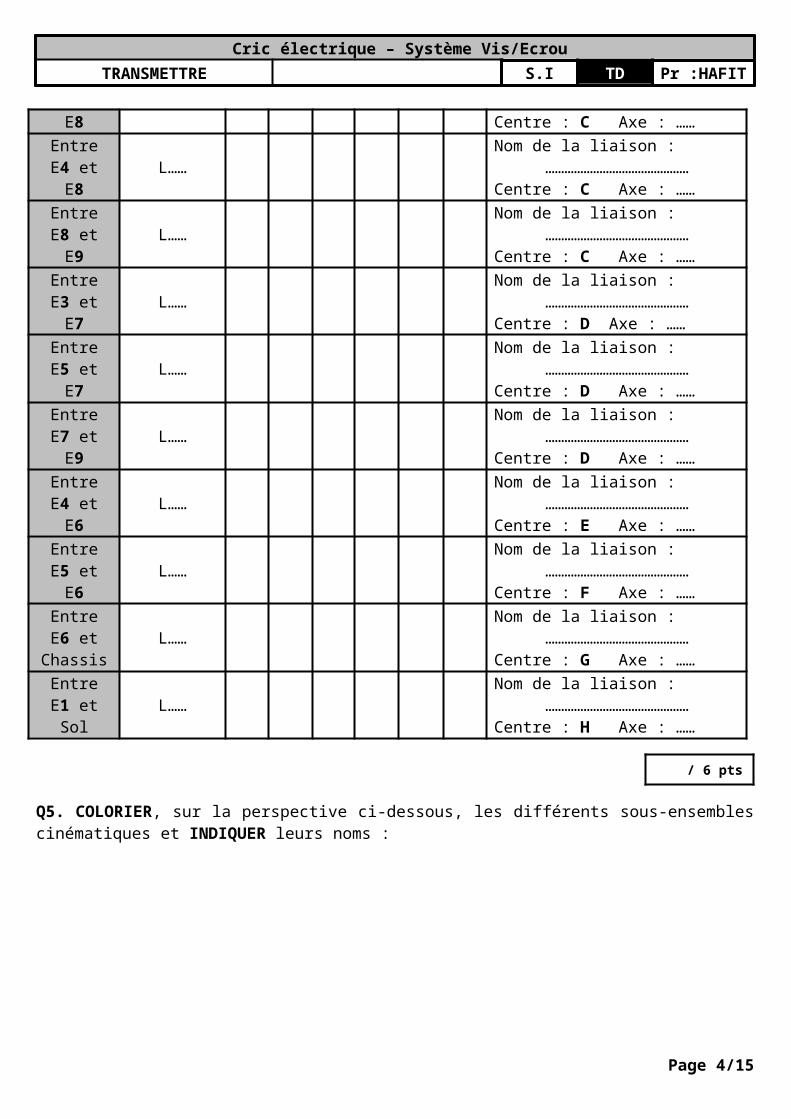
Q4. IDENTIFIER pour chaque liaison :Les mobilités existantes entre les classes d’équivalences ;Le nom de la liaison cinématique ;La direction de son axe ou de la normale au plan de contact.
Repère de la liaison
Tx Ty Tz Rx Ry Rz Nom, centre, axe ou normale au plan de contact de la liaison
EntreE1 et E2
L……Nom de la liaison :………………………………………Centre : A Axe : ……
EntreE1 et E3
L……Nom de la liaison :………………………………………Centre : B Axe : ……
EntreE2 et E8
L……Nom de la liaison :………………………………………Centre : C Axe : ……
Entre L…… Nom de la liaison :
Page 3/12
Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
E4 et E8………………………………………Centre : C Axe : ……
EntreE8 et E9
L……Nom de la liaison :………………………………………Centre : C Axe : ……
EntreE3 et E7
L……Nom de la liaison :………………………………………Centre : D Axe : ……
EntreE5 et E7
L……Nom de la liaison :………………………………………Centre : D Axe : ……
EntreE7 et E9
L……Nom de la liaison :………………………………………Centre : D Axe : ……
EntreE4 et E6
L……Nom de la liaison :………………………………………Centre : E Axe : ……
EntreE5 et E6
L……Nom de la liaison :………………………………………Centre : F Axe : ……
EntreE6 et
ChassisL……
Nom de la liaison :………………………………………Centre : G Axe : ……
EntreE1 et Sol
L……Nom de la liaison :………………………………………Centre : H Axe : ……
/ 6 pts
Q5. COLORIER, sur la perspective ci-dessous, les différents sous-ensembles cinématiques et INDIQUER leurs noms :
Page 4/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
/ 2,5 pts
E1
Page 5/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Etape 3 : Graphe des liaisons et schéma cinématique
Q6. COMPLETER le graphe des liaisons :
/ 4 pts
Sol
Châssis
Liaison engrènement
de centre I
Liaison engrènement
de centre J
Page 6/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Q7. COMPLETER le schéma cinématique du cric électrique (symbole des liaisons et repère des classes d’équivalences) :
Châssis Voiture
SOL
G +
X
Y
Z
F +
B +
D +
E +
A +
C +
C
+
D
+
J +
I +
+H
E1
/ 3 pts
Page 7/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Etape 4 : Etude cinématique du mécanisme de levage
Tous les mouvements sont dans le plan (X,Y) :Hauteur maximale du cric Hmax = 359 mmHauteur minimale du cric Hmin = 106 mm
Q1. Quelle est la nature du mouvement de la tête 6 par rapport au bâti 1 :
Mvt 6/1 : ……………………………………………….
Q2. DETERMINER, TRACER et REPERER la trajectoire du point GO de la tête 6 par rapport au bâti 1 (TG6/1) :
……………………………………………………………………………………………………………………………………………….
Nota : Le point G matérialise le point de contact entre la tête 6 et le véhicule. Il sera noté, comme tous les autres points, G0 en position basse et G1 en position haute.
Q3. PLACER la position haute du point G, notée G1 et celle des points E1 et F1.
Q4. Quelle est la nature du mouvement du bras 5 par rapport à la tête 6 :
Mvt 5/6 : ……………………………………………….
Q5. DETERMINER, TRACER et REPERER la trajectoire du point D du bras 5 par rapport à la tête 6 (TD5/6) à partir de la position haute :
……………………………………………………………………………………………………………………………………………….
Q6. Quelle est la nature du mouvement du bras 3 par rapport au bâti 1 :
Mvt 3/1 : ……………………………………………….
Q7. DETERMINER, TRACER et REPERER la trajectoire du point D du bras 3 par rapport au bâti 1 (TD3/1) :
……………………………………………………………………………………………………………………………………………….
Q8. TROUVER la nouvelle position du point D, notée D1 et la TRACER.
Q9. En utilisant la même méthode, TRACER la nouvelle position du point C notée C1.
Q10. MESURER la variation de distance sur l’axe X entre [COD0] et [C1D1], notée Δdx8/7 :
Δdx8/7 = ………………… mm
Page 8/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Quelle que soit la variation trouvée précédemment nous prendrons :Δdx8/7 = 245 mm
Page 9/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Echelle 1:5
Page 10/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Q11. Quelle est la nature du mouvement du support moteur 8 par rapport à l’écrou 7 :
Mvt 8/7 : ……………………………………………….
Q12. DETERMINER, TRACER et REPERER la trajectoire du point C du support moteur 8 par rapport à l’écrou 7 (TC8/7) :
……………………………………………………………………………………………………………………………………………….
Extrait du cahier des charges fonctionnel :
Fonction Critère NiveauFlexibilit
é
FP1 : soulever le véhicule du sol
Temps de montée tm = 1 min 15 s AucuneTemps de descente td = 1 min 15 s AucuneMasse levable < 1000 kg - 0 + 100
FC3 : s’adapter au véhicule
Alimentation électrique
12 V continu 15 A ± 5%
Adaptation châssisTout véhicule automobile particulier
Aucune
Q13. ECRIRE la relation littérale puis CALCULER la vitesse du point C du support moteur 8 par rapport à l’écrou 7 (VC8/7) :
Expression littérale : VC8/7 = ……………………
Application numérique : VC8/7 = ……………………
La composition des vitesses en C nous donne :
VC8/7 = VC8/9 + VC9/7Avec :
VC8/9 = 0 car C est coïncident à 8 et 9.
Q14. A l’aide de la composition des vitesses au point C, DETERMINER la vitesse au point C de la vis 9 par rapport à l’écrou 7 (VC9/7) :
………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………
…………………………………………….
Page 11/12

Cric électrique – Système Vis/EcrouTRANSMETTRE S.I TD Pr :HAFIT
Q15. A l’aide des ressources présentent sur le portail multimédia, ECRIRE la relation littérale puis CALCULER la vitesse de rotation de la vis 9 par rapport à l’écrou 7 (N9/7) :
Expression littérale (Préciser les unités) :
VC9/7= ……………………
N9/7 = ……………………
Application numérique :
N9/7 = …………………… = …………………… tr/s
1 tr/s = ……………………… tr/min
N9/7 = …………………… = …………………… tr/min
Q16. A l’aide des ressources présentent sur le portail multimédia, ECRIRE la relation littérale puis CALCULER la vitesse angulaire de la vis 9 par rapport à l’écrou 7 (ω9/7) :
Expression littérale (Préciser les unités) :
ω9/7 = ……………………
Application numérique :
ω9/7 = …………………… = …………………… rad/s
Page 12/12


















