TCC - Implantação de um Datalink para Aeronaves de Pequeno Porte
92
FACULDADE ASSIS GURGACZ DIEGO WILHELM DA ROCHA IMPLANTAÇÃO DE UM DATALINK PARA AERONAVES DE PEQUENO PORTE CASCAVEL 2011
-
Upload
diego-wilhelm -
Category
Technology
-
view
956 -
download
1
description
Trabalho apresentado como requisito para obtenção do título de bacharel em Engenharia de Telecomunicações da Faculdade Assis Gurgacz. - FAG.
Transcript of TCC - Implantação de um Datalink para Aeronaves de Pequeno Porte

FACULDADE ASSIS GURGACZ
DIEGO WILHELM DA ROCHA
IMPLANTAÇÃO DE UM DATALINK PARA AERONAVES DE PEQUENO PORTE
CASCAVEL 2011

DIEGO WILHELM DA ROCHA
IMPLANTAÇÃO DE UM DATALINK PARA AERONAVES DE PEQUENO PORTE
Trabalho apresentado como requisito para obtenção do título de bacharel em Engenharia de Telecomunicações da Faculdade Assis Gurgacz. - FAG
Orientador: Prof. Paulo Rogério Vieira Sarmento
CASCAVEL 2011

FACULDADE ASSIS GURGACZ
DIEGO WILHELM DA ROCHA
IMPLANTAÇÃO DE UM DATALINK PARA AERONAVES DE PEQUENO PORTE
Trabalho apresentado no Curso de Engenharia de Telecomunicações da Faculdade
Assis Gurgacz, como requisito parcial para obtenção do título de Bacharel em
Engenharia de Telecomunicações, sob a orientação do Professor Paulo Rogério
Vieira Sarmento.
BANCA EXAMINADORA
____________________________
Paulo Rogério Vieira Sarmento Faculdade Assis Gurgacz
____________________________
Vânio da Maia Faculdade Assis Gurgacz
____________________________
Ewerson Luis Poisk Faculdade Assis Gurgacz
Cascavel, 01 de Julho de 2011

A meus pais
.....Natália e Bejamim
A minha irmã e cunhado .....Patrícia e Jones
A Taitiana, .....Minha amada namorada. “ .... pessoas que são o alicerce da minha vida.... “

AGRADECIMENTOS
A Deus, que esta acima de todas as coisas, por ter permitido a realização
deste trabalho e guiado meus pensamentos, meus passos e por sempre estar
iluminando a minha vida.
A meus pais, eternas fontes de afeto e sabedoria, por acreditarem em mim e
me apoiarem na conquista dos meus sonhos.
A Patrícia e Jones, pelas inesquecíveis demonstrações de amizade e afeto
nos momentos em que mais precisei.
A minha querida namorada Taitiana, pela parceria, amor, carinho e pela
profunda paz e alegria que trouxe a minha vida.
Ao meu professor orientador Paulo Rogério, primeiramente por ter acreditado
em meu potencial e aceito a proposta apresentada, pela dedicada orientação e
apoio em momentos decisivos e por com certeza ter se tornado um grande amigo ao
longo destes anos.
Ao professor Vânio da Maia, pela sempre gentil recepção e por sempre estar
disposto a dividir experiências de vida, que com certeza me fizeram crescer muito
como ser humano.
Ao professor, amigo e colega de trabalho, Ewerson Poisk, pelos grandes
conhecimentos em eletrônica repassados e por sempre estar disposto a ajudar.
Ao professor e amigo Helder J. Carozzi, pela compreensão, pelo apoio neste
projeto e pela alegria contagiante.
A todos os professores do curso de Engenharia de Telecomunicações,
que sempre souberam além de passar os conhecimentos necessários para a vida
profissional, também passar verdadeiras lições de vida que com certeza foram super
importantes nestes anos de convivência.

Aos meus grandes amigos e futuros colegas engenheiros conquistados
com o passar destes anos, que tenho certeza esta amizade ainda ira se estender
por muitos anos.
Ao amigo Claudio, pelo apoio e por me apresentar ao universo das
telecomunicações, este ao qual tenho a alegria em saber que poderei agora estar
incluso durante toda a vida.
A grande amiga e conselheira Raquel Chebabi, que nos momentos de
dificuldade nunca hesitou em ajudar, sempre disposta a ouvir e por ser um grande
exemplo de determinação e dedicação.
A empresa Copel Telecomunicações S.A., em nome do Eng. Jorge Pirotti
e Eng. Manoel Nascimento, pelo apoio e disponibilidade sem os quais este trabalho
não poderia ser feito.
Ao colega Neivo Pothin, pelos grandes ensinamentos na área de Rádio
Frequência.
Ao Tenente Aviador Mateus Habermann, pelos conhecimentos em
comunicações aeronáuticas repassados.
A empresa GOL Linhas aéreas inteligentes, por permitir a experiência de
contato com as comunicações aeronáuticas em suas aeronaves.
Enfim, a todas as pessoas que, direta ou indiretamente, contribuíram para o
sucesso deste trabalho.

....o telégrafo é uma espécie de gato muito, muito comprido. Puxa- se a cauda do gato em Nova Iorque e a cabeça faz miau em Los Angeles.
Percebem isto? O rádio opera exatamente da mesma maneira: enviamos sinais aqui, eles recebem-nos além. A única diferença é que não
há gato nenhum...
Albert Einstein, quando lhe pediram para descrever o rádio.

RESUMO
Este trabalho apresenta o projeto e o protótipo de um sistema datalink (enlace de dados) para transmissão e recepção de dados através do uso do rádio VHF em aeronaves de pequeno porte. Devido ao elevado custo e complexidade dos equipamentos, a transmissão de dados é restrita a aeronaves de grande porte e a grandes empresas aéreas. O sistema datalink proposto neste trabalho é uma alternativa de baixo custo e simplicidade para aeronaves de pequeno porte, suprindo as necessidades de se transitar dados em tempo real, com segurança e como opção as comunicações de voz. O sistema realiza o envio e recepção de dados textuais através de um computador e de um rádio VHF, utilizando para isto um software, a placa de som do computador e interfaces de comunicação, é capaz de codificar e decodificar estas mensagens e fazer os acionamentos dos comandos de transmissão do rádio, conta também com uma interface microcontrolada para visualização das instruções de funcionamento e visualização do status de recebimento e transmissão de dados do datalink para auxilio do piloto. Palavras chave: Datalink. Rádio VHF. Aeronaves.

ABSTRACT
This work presents the design and prototype a datalink system (data link) for transmitting and receiving data through the use of VHF radio in small aircraft. Due to the high cost and complexity of equipment, data transmission is restricted to large aircraft and major airlines. The datalink system proposed here is an alternative low cost and simplicity for small aircraft, supplying the needs to move data in real time, safely and as an option for voice communication. The system makes sending and receiving text data via a computer and a VHF radio, using a software, the sound card of computer and communication interfaces, is able to encode and decode these messages and make the actuation commands of the radio transmission, also has an interface microcontrolled to display the operating instructions and view the status of receiving and transmitting data of the datalink to help the pilot. Key words: Datalink. VHF radio. Aircraft.

SUMÁRIO
1 INTRODUCAO ....................................................................................................... 11
2 FUNDAMENTAÇÃO TEÓRICA ............................................................................. 13
2.1 ONDAS ELETROMAGNÉTICAS ......................................................................... 13
2.2 PROPAGAÇÃO DE ONDAS ELETROMAGNÉTICAS ........................................ 13
2.3 ESPECTRO ELETROMAGNÉTICO .................................................................... 15
2.4 SINAIS EM VHF .................................................................................................. 17
2.4.1 Troposfera ........................................................................................................ 18
2.5 ONDA PORTADORA E PROCESSOS DE MODULAÇÃO ................................. 19
2.6 MODULAÇÕES DIGITAIS DE RF (RÁDIO FREQUÊNCIA) ............................... 20
2.6.1 Modulação ASK ................................................................................................ 22
2.6.1.1 Modulação ASK do tipo OOK ........................................................................ 23
2.6.2 Modulação FSK ................................................................................................ 23
2.6.2.1 Espectro do sinal FSK ................................................................................... 25
2.6.3 Modulação PSK ................................................................................................ 28
2.7 MODOS DE TRANSMISSÃO DIGITAL VIA RÁDIO ............................................ 29
2.7.1 Modalidade RTTY (Radio Teletype) ................................................................. 30
2.7.1.1 Velocidade de transmissão ........................................................................... 31
2.7.1.2 Combinação de Caracteres ........................................................................... 31
2.7.1.3 Recepção e decodificação de RTTY ............................................................. 32
2.8 RADIOCOMUNICAÇÃO AERONÁUTICA ........................................................... 33
2.8.1 Estrutura do sistema de radiocomunicação aeronáutica .................................. 33
2.8.2 Sistema Datalink .............................................................................................. 34
2.8.2.1 História .......................................................................................................... 35
2.8.2.2 Datalink VHF ACARS .................................................................................... 35
2.9 MICROCONTROLADORES PIC ......................................................................... 36
2.9.1 Microcontrolador PIC16F877 ............................................................................ 37
2.9.2 Programação de Microcontroladores em C ...................................................... 38
2.10 DISPLAYS LCD ................................................................................................. 38
3 REQUISITOS ......................................................................................................... 40
3.1 REQUISITOS DE HARDWARE E SOFTWARE .................................................. 40
4 ESPECIFICAÇÕES ................................................................................................ 42

4.1 ESPECIFICAÇÕES DO SOFTWARE MMTTY .................................................... 42
4.1.1 Funcionamento do software MMTTY ............................................................... 43
4.1.2 Detalhamento do software MMTTY .................................................................. 43
4.1.3 Processos de demodulação de sinais do software MMTTY ............................. 53
4.1.3.1 Demodulador Discriminador de Frequência (FIR e IIR)................................. 54
4.1.3.2 Demodulador Phase Locked Loop – PLL ...................................................... 55
4.1.4 Filtros................................................................................................................ 55
4.2 ESPECIFICAÇÕES DO SOFTWARE DA IHM .................................................... 56
4.3 ESPECIFICAÇÕES DO HARDWARE ................................................................. 61
4.3.1 Interface elétrica do PIC16F877 ....................................................................... 61
4.3.2 Interface elétrica do display LCD 16x2 ............................................................. 62
4.3.3 Interface elétrica do circuito integrado MAX232 ............................................... 63
4.3.4 Interface elétrica do LED .................................................................................. 64
4.3.5 Interface elétrica da conexão do áudio de saída do PC para o rádio ............... 64
4.3.6 Interface elétrica da conexão do áudio de saída do rádio para o PC ............... 65
4.3.7 Interface elétrica para ativação do PTT ............................................................ 66
5 IMPLEMENTAÇÃO ................................................................................................ 67
5.1 IMPLEMENTAÇÃO DO SOFTWARE DA IHM .................................................... 67
5.1.1 Comunicação serial RS-232 com o PC ............................................................ 68
5.1.2 Comunicação paralela com o display LCD ....................................................... 68
5.1.3 Funcionamento do software embarcado na IHM .............................................. 68
5.2 IMPLEMENTAÇÃO DO SOFTWARE MMTTY .................................................... 70
5.2.1 Personalização da tela principal ....................................................................... 71
5.2.2 Configurações de visualização ......................................................................... 72
5.2.3 Configurações de operação ............................................................................. 73
5.2.3.1 Configurações de operação – Setup MMTTY ............................................... 75
5.3 IMPLEMENTAÇÃO DO HARDWARE ................................................................. 82
5.4 TESTES .............................................................................................................. 85
6 RESULTADOS ....................................................................................................... 88
7 CONSIDERAÇÕES FINAIS ................................................................................... 89
REFERÊNCIAS BIBLIOGRÁFICAS ......................................................................... 90

11
1 INTRODUCAO
Desde a introdução do motor a jato na aviação comercial em 1952, a
tecnologia de informação juntamente com as telecomunicações, vem sendo
consideradas a maior revolução no mundo da aviação. Os avanços tecnológicos no
setor de telecomunicações são usados em seu mais alto nível na aviação comercial
e militar, no sentido de aumentar os níveis de segurança aliado a um aumento da
quantidade de trafego aéreo.
A utilização de sistemas para a transmissão de dados relevantes em tempo
real é amplamente abordada por grandes empresas aéreas e em aeronaves de
grande porte. Esses sistemas são extremamente caros e necessitam do uso de
equipamentos complexos funcionando paralelamente aos sistemas da aeronave.
Companhias aéreas de pequeno a médio porte, aeronaves particulares para
transporte de passageiros, cargas e utilizadas para lazer, acabam não tendo
condições de acesso aos sistemas de transmissão de dados pelo motivo do custo e
também pelas próprias aeronaves não possuírem tecnologia para embarcar estes
sistemas.
Portanto, o objetivo deste trabalho é desenvolver um sistema de transmissão
de dados de baixo custo, comandado via software, que possa ser implementado em
aeronaves de pequeno porte, utilizando seus meios de comunicação por voz via
rádio VHF para operação do datalink. Sabendo das inúmeras tarefas no comando de
uma aeronave e que o piloto e co-piloto devem possuir meios de fácil visualização e
operação dos equipamentos a bordo, juntamente com o datalink será desenvolvido
uma IHM (interface homem máquina), que forneça a visualização do status de
transmissão e recebimento de dados, permitindo ao usuário do equipamento um
maior controle sobre a operação do rádio, do software do datalink e dos comandos
da aeronave.
Este trabalho esta dividido em cinco capítulos:
a) Fundamentação Teórica: uma visão dos conceitos teóricos obtidos para
definição e execução deste trabalho.
b) Requisitos: definições dos requisitos de hardware e software necessários para
que o sistema e os dispositivos contemplem os recursos propostos.

12
c) Especificações: neste capitulo são apresentadas as especificações do
software utilizado para funcionamento do datalink, juntamente com seu
detalhamento de funções e funcionamento, as especificações do software da
IHM, as especificações do hardware e da estrutura do protótipo da IHM
(Interface Homem Máquina), os circuitos elétricos e interfaces.
d) Implementação: uma abordagem das técnicas e ferramentas utilizadas no
desenvolvimento do protótipo da IHM e das interfaces, dos ajustes de
parâmetros do software, assim como trechos do código fonte desenvolvido,
materiais utilizados e testes realizados.
e) Resultados: apresentação das dificuldades e das conquistas obtidas através
do desenvolvimento deste projeto e dos testes realizados.

13
2 FUNDAMENTAÇÃO TEÓRICA
2.1 ONDAS ELETROMAGNÉTICAS
A existência de ondas eletromagnéticas, previstas pelas equações de
Maxwell, foi inicialmente investigada por Heinrich Hertz. Após vários cálculos e
experimentos, Hertz teve sucesso na geração e detecção de ondas de rádio, as
quais são às vezes chamadas ondas hertzianas em sua homenagem.
Medeiros (2007) complementa que as ondas hertzianas ou eletromagnéticas,
são campos eletromagnéticos não audíveis e não visíveis pelo homem.
Segundo Sadiku (2004), ondas são um meio de transportar energia ou
informação, todas elas viajam em alta velocidade, ao se propagarem apresentam
propriedades ondulatórias e são irradiadas a partir de uma fonte sem a necessidade
de um meio físico de propagação.
Exemplos típicos de ondas eletromagnéticas incluem ondas de rádio, sinais
de TV, feixes de radar e raios luminosos (SADIKU, 2004).
2.2 PROPAGAÇÃO DE ONDAS ELETROMAGNÉTICAS
Uma onda é uma função do espaço e do tempo. O movimento ondulatório de
uma onda ocorre quando um distúrbio em um ponto A, em um instante de tempo t0,
está relacionado com o que ocorre em um ponto B, em um instante de tempo t > t0.
A propagação de uma onda eletromagnética pode se dar nos seguintes
materiais: espaço livre, dielétricos sem perdas, dielétricos com perdas e bons
condutores (SADIKU, 2004).
Uma onda senoidal pode ser descrita como:
E = A sen (ωt – βɀ) (1)

14
Onde:
E = intensidade do campo elétrico no espaço livre; A = amplitude da onda; ω = frequência angular (rad/s); t = tempo; β = constante de fase; ɀ = variável espacial; (ωt – βɀ) = fase da onda (em radianos); Ao analisarmos a Figura 1, onde temos a variável t constante, observamos
que a onda se repete após uma distância λ, portanto λ é chamado de comprimento
de onda (em metros), já analisando a Figura 2, onde a variável espacial ɀ é
constante, vemos que a onda leva um tempo T para se repetir, consequentemente T
é conhecido como o período (em segundos) (SADIKU, 2004).
Fonte: SADIKU(2004)
Figura 1 – Traçado de Ε(ɀ, t) = A sen(ωt – βɀ), com t constante.
Fonte: SADIKU(2004)
Figura 2 – Traçado de Ε(ɀ, t) = A sen(ωt – βɀ), com ɀ constante.

15
Portanto, como a onda leva um tempo T para se propagar por uma distância λ
a uma velocidade u, teremos:
λ = u T (2)
como:
T = 1/f (3)
onde f é a frequência (número de ciclos por segundo) da onda, em Hertz (Hz),
então:
u = f λ (4)
Segundo Sadiku (2004), pode-se a partir da relação fixa entre comprimento
de onda e frequência, identificar a posição de uma estação de rádio dentro de sua
faixa, tanto em termos de frequência, como em comprimento de onda. No entanto,
usualmente a frequência é preferida.
2.3 ESPECTRO ELETROMAGNÉTICO
O espectro eletromagnético é a distribuição da intensidade da radiação
eletromagnética com relação ao seu comprimento de onda e frequência.
O espectro eletromagnético é subdividido em faixas, ou zonas (podendo
haver alguma sobreposição entre elas) e pode ser visto na Tabela 1, as frequências
usadas para comunicações de rádio estão localizadas próximas a parte inferior do
espectro eletromagnético e suas respectivas denominações podem ser vistas na
Tabela 2.
[...] conforme a freqüência cresce, a energia EM torna-se perigosa para o homem. Os fornos de microondas por exemplo, podem causar lesões se não forem adequadamente blindados. As dificuldades práticas de usar energia eletromagnética para fins de comunicações também crescem com o aumento da freqüência,SIC, até que, finalmente, não possa mais ser usada [...] (SADIKU, 2004, p. 374).

16
TABELA 1 – O Espectro Eletromagnético
Fenômeno EM Exemplos de Usos Intervalo de Frequência
Raios cósmicos Física, Astronomia Acima de 101⁴ GHz
Raios gama Tratamento de câncer 1010 - 1013 GHz
Raios X Exames de raio X 108 - 109 GHz
Radiação ultravioleta Esterilização 106 - 108 GHz
Luz visível Visão humana 105 - 106 GHz
Radiação infravermelha Fotografia 103 - 104 GHz
Microondas
Radar, estações repetidoras de
microondas, comunicações por
satélite 3 – 300 GHz
Ondas de Rádio
Televisão UHF
Televisão VHF, rádio FM
Rádio em ondas curtas*
Rádio AM**
470 – 806 MHz
54 – 216 MHz
3 – 26 MHz
535 – 1.605 kHz
Fonte: SADIKU (2004) Nota específica: * No Brasil, de acordo com a Resolução nº 79, de 24 de dezembro de 1998, da Agência Nacional de Telecomunicações (ANATEL), esta faixa de freqüência se estende de 3 a 28 MHz. ** No Brasil, de acordo com a Resolução nº 79, de 24 de dezembro de 1998, da Agência Nacional de Telecomunicações (ANATEL), esta faixa de freqüência se estende de 535 a 1.625 kHz.
TABELA 2 – Denominações das faixas de frequência Faixas de frequências
Siglas
Denominações
Em função de λ
3 – 300 Hz ELF Frequências extremamente
baixas
Ondas de subáudio
300 – 3000 Hz VF Frequência de voz Ondas da voz
3 – 30 kHz VLF
Frequências muito baixas Ondas muito longas
30 – 300 kHz LF
Frequências baixas Ondas longas
300 – 3000 kHz MF
Frequências médias Ondas médias
3 – 30 MHz HF
Frequências altas Ondas curtas
30 – 300 MHz VHF
Frequências muito altas Ondas métricas
300 – 3000 MHz UHF Frequências ultra altas Ondas decimétricas
3 – 30 GHz SHF Frequências super altas Ondas centimétricas
30 – 300 GHz EHF Frequências extremamente
altas
Ondas milimétricas
Fonte: MEDEIROS (2007)

17
2.4 SINAIS EM VHF
VHF é a sigla para o termo inglês Very High Frequency (Frequência Muito
Alta) que designa a faixa de radio frequências de 30 a 300 MHz e λ de 10m. à 1m
(ENCICLOPÉDIA ENCARTA, 2008).
Os sinais em VHF são comumente utilizados para transmissão de rádio FM
(comumente em 88 – 108 MHz), transmissões televisivas (em conjunto com a faixa
de frequência UHF). Também são geralmente utilizados em comunicações aéreas,
sistemas de navegação terrestre e radioamadorismo (ENCICLOPÉDIA ENCARTA,
2008).
As ondas de rádio possuem algumas características principais conforme pode
ser visto no Quadro 1 (NASCIMENTO, 1992).
QUADRO 1 - Características principais das ondas de rádio
Freqüência Modo de Propagação Alcance Variação
Menor do que 3
MHz
(VLF, LF MF)
Ondas Terrestres (é
usada exclusivamente à
polarização vertical)
Inversamente proporcional à
freqüência do sinal.
Necessita potência elevada
Pequena
Entre 3 MHz e 30
MHz
(HF)
Ondas Ionosféricas e
Ondas Diretas (nas
freqüências mais
elevadas)
Proporcional à freqüência
Depende da hora
do dia e da
estação do ano
Acima de 30 MHz
(VHF, UHF, SHF e
EHF)
Ondas Diretas Depende da altura das
antenas Muito Pequena
Fonte: NASCIMENTO, 1992.
Segundo Miyoshi e Sanches (2006), nas faixas de VHF ou superior o uso de
refração ionosférica não é possível, porque nesta faixa as ondas refratadas não
chegam a atingir o ângulo necessário até os limites da ionosfera para retornar a
superfície terrestre, ainda afirmam que “nas faixas de VHF, UHF é possível
trabalhar com enlaces parcialmente obstruídos”, enquanto nas faixas de SHF e
EHF deve-se ter necessariamente a visada direta.

18
Ondas eletromagnéticas nas faixas de VHF e superiores propagam-se em
linha reta, sendo chamadas por essa razão, de ondas diretas, espaciais ou
troposféricas, já frequências inferiores a 3 MHz propagam-se acompanhando a
curvatura da terra, por isso são chamadas ondas de superfície ou terrestres, e as
ondas de rádio na faixa de HF são refletidas pelas camadas ionizadas da atmosfera,
por isso são chamadas ondas ionosféricas (NASCIMENTO, 1992). Um exemplo
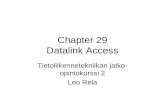
comparativo entre a propagação de ondas em VHF e HF pode ser visto na Figura 3:
Fonte: NICOLAU (2009) Figura 3 – Propagação de ondas em VHF x HF.
Os sinais das faixas de VHF propagam-se exclusivamente através de ondas
diretas, e constituem os sistemas de enlace por visibilidade, onde uma antena pode
“ver” a outra. O alcance confiável não costuma ultrapassar 40 km (NASCIMENTO,
1992).
2.4.1 Troposfera
A camada troposférica por onde as ondas em VHF se propagam é uma
camada adjacente à superfície terrestre, e se estende até uma altitude de
aproximadamente 11000m. É composta por gases como nitrogênio, oxigênio e
dióxido de carbono. A camada troposférica é transparente à radiação solar, cuja
temperatura decresce com a altitude, o principal efeito na propagação de ondas de
rádio em VHF é o da refração, efeito este que atua na trajetória das ondas com o

19
aumento da velocidade de propagação devido à elevação da altitude (MIYOSHI;
SANCHES, 2006).
2.5 ONDA PORTADORA E PROCESSOS DE MODULAÇÃO
Um sinal de rádio não modulado é conhecido como onda portadora. Para a
transmissão eficiente de informações através de ondas eletromagnéticas, é
necessário algum tipo de modulação ou codificação (NASCIMENTO, 1992).
Segundo Haykin (2004), para fazer isso o transmissor modifica o sinal de
mensagem para uma forma apropriada à transmissão através do canal. Essa
modificação é realizada por meio de um processo conhecido como modulação.
O processo de modulação consiste em fazer um dos parâmetros de uma
onda portadora senoidal p(t), variar acompanhando o sinal de mensagem x(t) que
se quer transmitir, denominado sinal modulador (CARVALHO, 2003).
p(t) = E0 * cos(2πf0t+ ɸ) (5)
onde:
E0 = Amplitude;
ɸ = Ângulo de fase; f0 = Frequência da portadora; t = tempo;
Os parâmetros da onda portadora que podem ser alterados pelo sinal da
mensagem x(t) são sua amplitude E0 e seu ângulo de fase ɸ, resultando nos
processos de modulação de amplitude e modulação ângular.
O sinal modulador x(t), que representa a informação a ser transmitida, tem
seu espectro limitado a uma frequência máxima fM, ou seja, a onda portadora
senoidal serve simplesmente de suporte para a transmissão da informação e tem
geralmente uma frequência f0, muito maior que fM (CARVALHO, 2003).
Segundo Carvalho (2003), os processos de modulação podem ser divididos
em modulação analógica e modulação digital. Se o sinal x(t) é um sinal
analógico (varia continuamente em um determinado intervalo de tensão), um dos

20
parâmetros da onda portadora (ângulo ou amplitude) acompanhará continuamente a
variação do sinal x(t), temos então um processo de modulação analógica. Já se o
sinal x(t) é um sinal digital (só assume valores de tensão a partir de um conjunto
discreto), temos um processo de modulação digital. Neste caso a variação de um
dos parâmetros, ou ambos (fase ou amplitude) de uma portadora senoidal, ocorre
alternando entre valores de um conjunto discreto, sempre acompanhando o sinal
modulador x(t).
Um dos motivos para utilizar o processo de modulação é para facilitar o
processo de irradiação do sinal. Para que ocorra irradiação eletromagnética
eficiente, é necessário que o elemento irradiador denominado de antena, tenha
dimensões físicas da ordem de grandeza (pelo menos um décimo) do comprimento
de onda do sinal que se deseja irradiar. Sabendo disso, para frequências muito
baixas, o elemento irradiador teria uma dimensão impraticável de ser construído,
porém aplicando o processo de modulação, como exemplo de um sinal x(t) por um
sinal senoidal de uma onda portadora de frequência mais alta, é possível conseguir
dimensões do elemento irradiador viáveis de serem implementadas (CARVALHO,
2003).
A tecnologia de modulação para transmissão por irradiação vem sendo
utilizada desde o inicio do século XX.
2.6 MODULAÇÕES DIGITAIS DE RF (RÁDIO FREQUÊNCIA)
Existem três processos básicos de modulação: de amplitude, de frequência
e de fase. O sinal modulador digital assume somente valores discretos de tensão, os
processos de modulação digital são conhecidos como modulação por chaveamento
de amplitude, de frequência e de fase, respectivamente identificados pelas siglas
ASK, FSK e PSK, do inglês – amplitude/frequency/phase shift keying, conforme
pode ser visto na Figura 5. Ainda há mais um processo de modulação misto de
amplitude e fase denominado QAM (Quadrature Amplitude Modulation)
(CARVALHO, 2003). A Figura 4 exibe um exemplo macro de modulação de um sinal
digital.

21
Segundo Carvalho (2003), os sistemas digitais de RF (Rádio Frequência),
utilizam portadora senoidal de frequência elevada, adequada a irradiação
eletromagnética (transmissão via rádio). Em sistemas digitais de RF utiliza-se
exclusivamente os formatos NRZ (Non-Return to Zero – Não Retorno a Zero) para
transmissão.
Fonte: MIYOSHI;SANCHES (2006) Figura 4 – Modulação Digital
Fonte: MIYOSHI;SANCHES (2006)
Figura 5 – Tipos de Modulação Digital

22
2.6.1 Modulação ASK
Segundo Carvalho (2003), no processo de modulação digital ASK, a
amplitude da portadora senoidal é alterada de acordo com o sinal digital x(t) a ser
transmitido. As várias formas de modulação digital de amplitude são chamadas de
família ASK e podem ser vistas na Figura 6.
Fonte: CARVALHO (2003)
Figura 6 – Modulação de Amplitude (ASK)
Com sinal modulador digital binário, a amplitude do sinal modulado pode
assumir apenas dois valores – sistema de modulação BASK (Binary ASK). No caso
particular em que um desses dois valores é zero, o sistema de modulação
denomina-se OOK (On-Off Keying), onde a portadora é ligada ou desligada
conforme se transmita uma marca ou um espaço, daí a razão de sua denominação.
Com sinal modulador digital multinivel, a amplitude do sinal modulado pode assumir
M valores discretos – chamado de sistema de modulação M-ASK (Multilevel ASK)
(CARVALHO, 2003).

23
2.6.1.1 Modulação ASK do tipo OOK
A modulação OOK é o tipo mais simples de modulação por sinal digital, ela
consiste em suprimir a portadora quando o sinal modulante é zero e transmiti-la
quando o sinal for um, conforme pode ser visto na Figura 7 em que G é o gerador da
potência da portadora senoidal. Na Figura 8 é possível visualizar o gráfico da
portadora chaveada em dois níveis de amplitude (MEDEIROS, 2007).
Fonte: MEDEIROS (2007)
Figura 7 – Chaveamento ASK do tipo on-off
Fonte: MEDEIROS (2007)
Figura 8 – Portadora chaveada em dois níveis de amplitude
2.6.2 Modulação FSK
No sistema FSK (Frequency Shift Keying), o sinal digital a ser transmitido atua
sobre a frequência da portadora, mantendo a mesma amplitude e a continuidade da
fase. Assim, a portadora assume dois valores de frequências (tons de áudio), um

24
para o bit 1 e outro para o bit 0. Alguns dispositivos possuem chaveamento para
trocar o tom do bit 1 pelo tom do bit 0 (MEDEIROS, 2007).
Assim como no sistema ASK, FSK possui um sistema BFSK (Binary
Frequency Shift Keying), em que uma frequência f0 representa o símbolo 0 (espaço)
e uma outra frequência f1 representa o símbolo 1 (marca), e um sistema MFSK
(FSK Multinível), onde o sinal modulador é um sinal multinível, resultando em um
sinal modulado que pode assumir M valores discretos de frequência ( CARVALHO,
2003).
A modulação FSK é bastante utilizada em sistemas de rádio, e normalmente é
usada para transmissão de dados em baixas velocidades (MIYOSHI; SANCHES,
2006).
A Figura 9 mostra a portadora senoidal de áudio chaveada em frequência.
Fonte: MEDEIROS (2007)
Figura 9 – Chaveamento FSK
Segundo Laskoski, Marcondes e Szeremeta (2006), o formato de modulação
FSK é o que ocupa a maior largura de faixa de todos, pois os espectros centrados
em F0 e F1 não podem ser superpostos a fim de que a informação seja preservada.
A modulação FSK foi originalmente desenvolvida para enviar texto através de
dispositivos de rádio teleimpressor. O deslocamento da portadora entre a marca e o
espaço foi usado para gerar caracteres no código Baudot. No receptor, os sinais
Baudot foram utilizados para produzir texto impresso para impressoras e
posteriormente em telas de vídeo. Com o desenvolvimento tecnológico, a
modulação FSK foi utilizada para transmitir mensagens no código ASCII utilizados
por computadores e permitiu o uso de caracteres caixa baixa, alta e símbolos
especiais.

25
A introdução de microprocessadores tornou possível usar o FSK para enviar
mensagens com capacidade de verificação e correção automática de erros. Isto é
feito através da inclusão de códigos de verificação de erro nas mensagens,
permitindo que a estação receptora possa requisitar a retransmissão se uma
mensagem ou os códigos de verificação de erro estiverem em conflito (ou se o
código não for recebido).
Entre os modos mais comuns tais como o FSK, estão a tele impressão
amadora através do rádio (AMTOR) e a correção adiantada de erro (FEC). A
modulação FSK é o modo mais rápido de se enviar texto pelo rádio, e os modos de
correção de erro oferecem alta acuracidade e confiabilidade. O espaço de
frequência ocupado depende da quantidade de deslocamentos, mas um sinal típico
de FSK ocupa menos que 1.5 kHz de espaço.
A grande desvantagem do FSK é a necessidade de um equipamento de
recepção mais elaborado e sua principal característica é a imunidade a ruídos,
quando comparada com a ASK.
A modulação FSK é utilizada em modems de baixa velocidade e transmissão
via rádio.
2.6.2.1 Espectro do sinal FSK
Segundo Carvalho (2003), para determinarmos o espectro do sinal FSK,
podemos considerar uma versão NRZ (Non-Return to Zero) unipolar do sinal x(t),
denominada “sinal básico” e uma versão NRZ (Non-Return to Zero) unipolar
denominada “sinal complementar” oposta à anterior, obtendo assim o sinal digital
binário x(t) NRZ (Non-Return to Zero) bipolar, o qual produz o sinal modulado BFSK
representado na Figura 10.
Ou seja, o sinal modulado FSK pode ser visualizado como a soma do sinal
modulado OOK produzido pelo sinal básico sobre a portadora de frequência f1, com
o sinal modulado OOK produzido pelo sinal complementar sobre a portadora de
frequência f0.

26
Fonte: CARVALHO (2003)
Figura 10 – Sinal FSK como superposição de dois sinais OOK
O espectro do sinal FSK pode ser visto na Figura 11, o qual é resultante da
superposição do espectro do sinal básico para a frequência f1 com o espectro do
sinal complementar deslocado para a frequência f0. Como o sinal básico e o sinal
complementar são sinais NRZ (Non-Return to Zero) unipolares, existem
componentes discretas nas frequências f0 e f1.
Fonte: CARVALHO (2003)
Figura 11 – Espectro do sinal FSK
Como complemento ao processo de formação do sinal modulado FSK,
segundo Miyoshi e Sanches (2006), a modulação FSK é formada por dois
moduladores ASK, sendo que um deles produz pulsos modulados na frequência F1

27
para cada bit 1, enquanto o outro produz pulsos modulados na frequência F0 para
cada bit 0. A saída dos moduladores é combinada e transmitida. Na Figura 12 é
possível visualizar o processo citado acima.
Fonte: MIYOSHI;SANCHES (2006).
Figura 12 – Modulação FSK
Em função da técnica aplicada ao circuito eletrônico da recepção, o FSK pode
ser coerente ou não coerente, tendo o primeiro melhor desempenho que o segundo
(menor taxa de erros). A detecção coerente requer um sinal senoidal de referência
perfeitamente casado em frequência e fase com a portadora recebida, essa
referência de fase pode ser obtida pelo uso de um tom piloto transmitido ou do
próprio sinal modulado, já a detecção não coerente não requer referência de fase.
Outra variante é o MSK (Minimum Shift Keying), no qual um desvio mínimo da
frequência da portadora é capaz de sensibilizar o receptor sem acarretar erros de
decisão (MEDEIROS, 2007).
Um exemplo de deteção não coerente e deteção coerente de um sinal FSK
recebido pode ser visto respectivamente nas Figuras 13 e 14.
Fonte: CARVALHO (2003)
Figura 13 – Deteção não coerente de um sinal FSK

28
Fonte: CARVALHO (2003)
Figura 14 – Deteção coerente de sinal FSK
2.6.3 Modulação PSK
O sistema de modulação PSK (Phase Shift Keying), chaveamento por desvio
de fase, consiste em alterar a fase da portadora em um ou mais pontos do período
da senóide (entre 0 e 2π), mantendo-se constantes a amplitude e a frequência da
onda (MEDEIROS, 2007).
A fase da portadora é variada em função dos bits de informação, conforme
pode ser visto na Figura 15. No caso de transmitir uma informação (um trem de bits)
por canal de comunicação, temos o 2 PSK. Como este tipo de modulação é bastante
ineficiente em termos de quantidade de bits transmitidos por largura de banda,
utilizam-se normalmente modulações PSK multiníveis para reduzir esta ineficiência
(MIYOSHI; SANCHES, 2006).
A medida que aumenta o nível da modulação, exemplo 4 PSK (2 bits) e 8
PSK (3 bits), aumenta também a sensibilidade a ruídos e distorções, de forma que o
desempenho fica comprometido, por este motivo a maioria dos sistemas utiliza
modulações 4 PSK.

29
Fonte: MEDEIROS (2007)
Figura 15 – Chaveamento PSK, bit a bit.
2.7 MODOS DE TRANSMISSÃO DIGITAL VIA RÁDIO
Segundo Humberto (2011), modos digitais são aqueles que utilizam códigos
fundamentados em dois estados dos circuitos: condução/não condução,
ligado/desligado, designados também como SIM/NÃO (ON/OFF) ou bits “1/0”. A
transferência de dados via modos digitais pode ocorrer entre máquinas,
computadores, etc., e para diversos fins.
A transmissão de dados por modos digitais via rádio, acontece pelo envio da
informação via teclado (PC), os dados são encaminhados para o rádio transmissor
através da placa de som ou modem (modulador/demodulador) e na sua recepção o
processo é inverso.
Existem alguns modos digitais mais amplamente utilizados, como por exemplo
CW, OLIVIA, PSK-31, QPSK, PACKET, RTTY e MFSK-16. Eles se diferenciam pelo
desempenho na transmissão de dados, métodos de correção de dados e
sensibilidade na recepção de sinais fracos. Um comparativo do espectro referente
aos modos digitais citados acima, pode ser visto na Figura 16:

30
Fonte: HUMBERTO (2011)
Figura 16 – Comparativo de Espectro entre Modos Digitais
2.7.1 Modalidade RTTY (Radio Teletype)
(Radio Teletype) ou rádio-teletipo, é um modo de transmissão digital via rádio.
A exemplo da transmissão em telegrafia, o RTTY utiliza um código para gerar os
números, letras e alguns caracteres. Este código é conhecido internacionalmente
como International Telegraph Alphabet Number 2 (ITA 2), Código Baudot ou
Murray e é composto de sete dígitos, um bit de partida (Start Bit), cinco bits que ao
se combinarem formam o código Baudot e um bit de parada (Stop Bit) (PY6TL;
PY7AW, 2011) e (FORD, 2008);
O código Baudot, como qualquer sistema binário, tem dois estados, que são
chamados de espaço (sem sinal) e marca (com sinal). Com a evolução tecnológica
para maior confiabilidade, ao invés de verdadeiras marcas e espaços, passou-se a
usar duas frequências de áudio diferentes, cada uma correspondente a um dos dois
estados, geralmente a marca é representada como um tom de 2125 Hz e o espaço
como um tom de 2295 Hz. A diferença entre as duas frequências ficou conhecida
como shift (desvio), geralmente utilizada em 170 Hz (FORD, 2008).
Nas ondas decamétricas (ondas curtas), a transmissão é feita em banda
lateral única e as duas frequências de áudio são levadas como duas portadoras

31
distintas não moduladas. O modo, no caso, é conhecido como Frequency Shift
Keying (FSK), com alusão à mudança de frequência.
Nas ondas métricas (VHF) e decimétricas (UHF), bem como em frequências
superiores, o sistema utiliza AM (Amplitude Modulation) ou FM (Frequency
Modulation) moduladas alternadamente com as duas frequências de áudio, sendo
que neste caso o modo é conhecido como Audio Frequency Shift Keying (AFSK)
(PY6TL; PY7AW, 2011).
Por ter áudio como base para sua transmissão no sistema AFSK, a
modalidade RTTY pode ser transmitida em FM e AM (HUMBERTO, 2011).
2.7.1.1 Velocidade de transmissão
A velocidade de transmissão utilizando o Código Baudot normalmente é de 45
bauds, o que equivale a 60 ppm. (palavras por minuto), este valor é conseguido
levando-se em consideração a duração de cada bit a ser transmitido. Como a
duração de cada bit é de 22ms, em um segundo caberiam 1000ms divididos por
22ms, ou seja, 45,45 bits ou 45 bauds (FORD, 2008).
2.7.1.2 Combinação de Caracteres
O Código Baudot é composto de apenas cinco dígitos, este número limita a
combinação de caracteres a um limite de 32 caracteres. Como esta quantidade de
caracteres não é suficiente para compor todas as 26 letras do alfabeto mais os
números e sinais de pontuação, dois comandos são reservados para resolver este
problema, o LETTERS SHIFT e FIGURES SHIFT. Com estes dois comandos o
número de combinações é ampliado para 64 caracteres (PY6TL; PY7AW, 2011).
Quando uma transmissão em RTTY é iniciada, o sistema se posiciona
automaticamente em LETTERS SHIFT, permitindo desta forma que as letras do
alfabeto sejam transmitidas, quando forem inseridos números ou sinais de
pontuação na mensagem, o terminal automaticamente insere o comando FIGURES

32
SHIFT, permitindo a transmissão desses caracteres (PY6TL; PY7AW, 2011) e
(FORD, 2008).
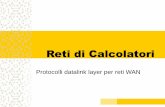
2.7.1.3 Recepção e decodificação de RTTY
Para a correta decodificação da mensagem transmitida em RTTY, é
necessário que o software de recebimento esteja corretamente sintonizado. O
método de ajuste padrão é a utilização de um osciloscópio, porém alguns programas
disponibilizam o sinal (tons de marca e espaço), por duas elipses cruzadas,
chamado também de “bananas” cruzadas. A Figura 17 ilustra o mostrador de
“bananas” cruzadas, onde o mostrador (A) indica que o sinal foi corretamente
ajustado (sintonizado), o mostrador (B) indica que o sinal esta um pouco fora de
frequência e o mostrador (C) indica que a estação de transmissão esta utilizando um
shift (desvio) de frequência diferente do configurado no software para recepção
(FORD, 2008).
Fonte: HUMBERTO (2011)
Figura 17 – Mostrador de sintonia RTTY - Elipses Cruzadas
Segundo Ford (2008), a decodificação de uma mensagem enviada através de
um sinal RTTY, inclui um conjunto de filtros de áudio para identificar as frequências
de marca e espaço funcionando em conjunto com o shift (desvio) das frequências
para a correta decodificação da mensagem. Ford (2008) ainda salienta a importância
da sensibilidade e acuracidade na sintonia do sinal, a fim de detectar fielmente os

33
tons de marca e espaço, reproduzindo a mensagem transmitida corretamente
mesmo em situações onde o sinal esteja fraco ou com interferência.
2.8 RADIOCOMUNICAÇÃO AERONÁUTICA
Conforme Instrução ICA 102-9 (2005), toda e qualquer aeronave que opere
no espaço aéreo brasileiro, em rotas ou áreas sujeitas ao controle de tráfego aéreo,
deverá possuir todas as frequências necessárias para operar nessas rotas ou áreas.
A faixa de frequências de VHF-AM utilizada no Brasil para comunicações do
Serviço Móvel Aeronáutico está compreendida entre 118,000 e 136,975 MHz. Todos
os transceptores de VHF-AM devem operar com espaçamento máximo de 25 kHz.
Os transmissores VHF-AM devem preencher três requisitos mínimos de
operação:
a) estabilidade de frequência de ± 0,0003%;
b) potência de saída de 5W; e
c) capacidade de, no mínimo, atingir um índice de modulação de 85%.
Os equipamentos receptores VHF-AM devem atender também três requisitos
mínimos para operação:
a) sensibilidade de 3 microvolts para relação sinal/ruído de 6 dB;
b) variação do nível de saída de áudio não deverá ser superior a 6 dB para
sinais de entrada entre 5 microvolts e 50 milivolts; e
c) saída de áudio de 50 miliwatts de 600 Ohms.
2.8.1 Estrutura do sistema de radiocomunicação aeronáutica
Conforme o Regulamento RCA 102-1 (2010), o serviço de Telecomunicações
do Comando da Aeronáutica (STCA) tem por finalidade supervisionar, coordenar e

34
controlar as atividades de telecomunicações do Comando da Aeronáutica
(COMAER).
O STCA engloba os serviços de transmissão de informações relacionadas à
navegação aérea, radionavegação, telecomunicações entre pontos fixos e
telecomunicações do serviço móvel entre Estações Aeronáuticas e Estações de
Aeronave ou entre Estações de Aeronave. (RCA 102-1, 2010).
Quanto as atividades e canalização de radiofrequência, o STCA é
responsável por controlar os serviços de modalidade móvel que compreende a
comunicação entre aeronaves e estações terrestres e entre aeronaves, controla os
serviços de difusão de sons, imagens ou sinais para transmissão de informações, os
serviços de transmissão de dados via voz digitalizada e imagem e os serviços de
fac-símile (FAX).
2.8.2 Sistema Datalink
Segundo Nicolau (2009), DATALINK é um termo genérico para
comunicações que habilita a troca de informações digitais entre utilizadores finais
(fontes ou consumidores de informação). Os sistemas e aplicações finais são
independentes do meio Datalink utilizado.
O sistema datalink tem diferentes protocolos, aplicações e utiliza meios de
comunicação (VHF, HF, SATCOM - Satélite) e tem como principais objetivos:
Fornecer um meio alternativo à comunicação por voz;
Automatizar o máximo possível as tarefas de comunicação;
Reduzir carga de trabalho do Piloto e Controlador de tráfego aéreo;
Aumentar a eficiência, capacidade e segurança do controle do tráfego aéreo;
Providenciar troca de informação adicional de forma automática utilizando
sistemas a bordo e em terra;

35
2.8.2.1 História
O uso dos rádios para comunicação na aviação começou por volta de 1929 e
já no início da II Guerra Mundial foram realizadas experiências para sistemas de
aterrissagem automáticos. Na aeronáutica, as rádio estações eram utilizadas como
meio de navegação, o que possibilitava voar sem depender de contato visual com a
terra.
Por volta de 1978 as companhias aéreas percebendo o potencial das
comunicações aéreas digitais, introduziram o Aircraft Comunications and
Reporting System (ACARS), que permitia a troca de informação entre aeronaves e
estações em terra, hoje em dia o sistema ACARS é um dos sistemas mais utilizados
a nível mundial por companhias aéreas para troca de informações operacionais
(NICOLAU, 2009).
O sistema ACARS foi desenvolvido inicialmente como resposta ao requisito da companhia Piedmont Airlines para encontrar uma melhor forma de calcular tempos de serviço de tripulações. A aplicação inicial tinha o nome de “OOOI” e oferecia comunicação Aeronautical Operational Communications (AOC). OOOI fornece informação: Out of the gate, Off wheels weight on takeoff, On weight back on the wheels e In arrive at gate. À medida que o sistema foi evoluindo, as organizações descobriram que outro tipo de informação que podia ser transmitida e recebida através do sistema ACARS, e deu-se a expansão e desenvolvimento do sistema. Os serviços de manutenção encontraram também uma mais valia no downlink em tempo real de parâmetros da aeronave. (NICOLAU, 2009, p. 16).
2.8.2.2 Datalink VHF ACARS
O Datalink VHF ACARS é um sistema de baixa velocidade, orientado por
caracteres e tem uma taxa de transmissão bruta de até 2.4 kbps, a taxa de
transmissão de dados é da ordem de 300 à 600 bps e seu tempo de entrega de
mensagem geralmente é superior a 5 segundos. Foi introduzido na aviação civil em
1978 e é o Datalink básico para ACARS (NICOLAU, 2009).
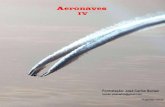
A Figura 18 demonstra a topologia geral de funcionamento de um Datalink,
onde o Datalink Airborne Systems é responsável pelo encaminhamento das
mensagens a bordo da aeronave para os sistemas finais apropriados, o Datalink
Service Provider é responsável pela fiabilidade do meio de transmissão Ar/Terra,

36
seja ele VHF, HF ou SATCOM e o End-users Ground System é o meio utilizado por
operadores de trafego aéreo e controladores operacionais das companhias aéreas
como interface de entrada ao Datalink.
Fonte: NICOLAU (2009)
Figura 18 – Topologia Datalink
2.9 MICROCONTROLADORES PIC
Segundo Souza (2006), pode-se definir o microcontrolador como um
“pequeno” componente eletrônico, dotado de uma “inteligência” programável
utilizado no controle de processos lógicos. Ou ainda conforme Nicolosi (2002),
microcontrolador é um dispositivo central que controla todo o funcionamento do
circuito, isto é, manipula dados e gerência a transferência desses dados entre os
periféricos internos e os periféricos externos.

37
Os microcontroladores PIC (Peripheral Interface Controller) são uma família
de dispositivos fabricados pela Microchip® e utilizam uma arquitetura RISC
(Reduced Instruction Set Computer), com frequências de Clock de até 40 MHz, até
2048 palavras de memória de programa e até 3968 bytes de memória RAM
(Random Access Memory). Os microcontroladores PIC podem ser encontrados com
diversos periféricos internos (PEREIRA, 2002).
Segundo Souza (2003), a grande vantagem da família PIC é que todos os
modelos possuem um set de instrução bem parecidos, assim como também mantêm
muitas semelhanças entre suas características básicas.
2.9.1 Microcontrolador PIC16F877
O PIC16F877 é um microcontrolador fabricado pela Microchip Technology®.
Sua frequência de operação (clock) pode chegar até 20 MHz e opera com
alimentação de 4 volts à 5,5 volts. É um modelo extremamente poderoso, pois
agrupa de uma só vez o maior número possível de recursos disponíveis (SOUZA,
2003).
O PIC16F877 possui 40 pinos, o que possibilita a montagem de um hardware
complexo e capaz de interagir com diversos recursos e funções ao mesmo tempo.
Possui 33 portas configuráveis, como entrada e saída digital, dois conversores
analógicos de 10 bits (8x) e comparadores analógicos (2x). Possui memória de
programação EEPROM FLASH, que permite a gravação rápida do programa
diversas vezes no mesmo chip sem a necessidade de apagá-lo por meio de luz
ultravioleta. Sua via de programação tem 14 bits e 35 instruções. Suporta gravação
in-circuit. Possui memória EEPROM interna de 256 bytes e RAM com 368 bytes e
memória de programa com 8 kwords, com capacidade de escrita e leitura pelo
próprio código interno. Possui 15 interrupções, três timers, comunicações seriais:
SPI™, I²C™ e USART, conta ainda com recursos de Power-On-Reset e Brown-out
Reset (SOUZA, 2003).

38
2.9.2 Programação de Microcontroladores em C
A maioria dos microcontroladores disponíveis no mercado disponibiliza
compiladores em linguagem C, pois é uma linguagem de alto nível, acelerando e
facilitando o processo de programação. O uso de C permite a construção de
programas e aplicações complexas, e além de proporcionar velocidade na criação
de novos projetos, devido às facilidades oferecidas pela linguagem. Também oferece
grandes benefícios devido a sua portabilidade, o que permite adaptar programas de
um sistema para o outro com um mínimo de esforço (PEREIRA, 2003).
Segundo Pereira (2003), a linguagem C é uma linguagem eficiente, que no
jargão dos compiladores, é a medida do grau de inteligência com que o compilador
traduz um programa C para o código da máquina. Quanto menor e mais rápido o
código gerado, maior será a eficiência da linguagem e do compilador. A linguagem
de programação C permite que o programador preocupe-se mais com a
programação da aplicação em si, já que o compilador assume para si tarefas como o
controle e a localização das variáveis, operações matemáticas e lógicas, verificação
de bancos de memória, etc.
2.10 DISPLAYS LCD
Segundo Zanco (2006), o display LCD (Liquid Cristal Display) é uma opção
prática de apresentar uma grande quantidade de dados de forma relativamente
simples e barata, fundamental para a IHM (Interface Homem Máquina). Esta
facilidade fez com que os LCDs ganhassem popularidade e hoje são usados em
uma grande quantidade de equipamentos eletrônicos.
Os displays LCD são muito mais poderosos que os displays de segmentos,
por possuírem mais caracteres e serem alfanuméricos (SOUZA, 2003).
Segundo Pereira (2003), existem dois tipos de displays LCD: Os de
caracteres e os gráficos. Os displays de caractere são mais baratos e capazes de
apresentar caracteres como letras, números e símbolos. Esses displays não

39
funcionam adequadamente para a apresentação de gráficos, já que a sua tela é
dividida em linhas e colunas, e cada posição armazena um caractere. Já os displays
gráficos são mais caros e complexos de programar, porém podem apresentar
virtualmente qualquer tipo de informação na tela, inclusive gráficos e fotos.
A funcionalidade de um display LCD é conseguida através de um circuito
eletrônico chamado LCD Controler (Controlador de LCD). O LCD Controler é o
coração do LCD, cabendo a ele toda a tarefa de fazer acender os diversos
segmentos do display (ZANCO, 2006).
Segundo Pereira (2003), esses controladores permitem uma interface simples
com sistemas microprocessadores ou microcontrolados, com largura de barramento
de dados selecionável para 4 ou 8 bits.

40
3 REQUISITOS
Neste capitulo serão abordadas as definições dos requisitos de hardware e
software necessários para que o sistema e os dispositivos contemplem os recursos
propostos.
3.1 REQUISITOS DE HARDWARE E SOFTWARE
Para que o datalink entre o rádio VHF da aeronave e o rádio VHF da estação
base em solo ou outras aeronaves funcione, é necessário que o sistema seja capaz
de modular e converter os sinais digitais enviados por uma interface de entrada de
dados (PC), para sinais analógicos no momento da transmissão ao rádio. Na
recepção que seja capaz de converter os sinais analógicos de saída do rádio em
sinais digitais para a demodulação no (PC).
Ainda é necessário que o sistema seja capaz de se comunicar com uma IHM
(Interface Homem Máquina), a fim de fornecer um meio auxiliar de visualização de
status de recebimento e transmissão de dados, facilitando assim a operação do
equipamento.
Para isso o sistema datalink deverá contar com os seguintes recursos:
a) Possuir uma IHM microcontrolada composta de display LCD, led, controle de
contraste e controle de iluminação;
b) Interface de entrada e saída de dados capaz de enviar e receber mensagens
de texto.
c) O sistema deverá ser capaz de se adaptar a diferentes usuários, podendo
receber sua identificação para enviar junto à mensagem, efetuar gravação
das mensagens recebidas e enviadas, permitir ao usuário armazenar
mensagens prontas e disponibilizar de forma rápida e fácil seu acesso para
envio;
d) O sistema deverá ser capaz de efetuar o controle de acionamento do rádio.

41
e) Possuir uma interface de saída de áudio com divisor de tensão para
acoplamento ao rádio e uma interface de entrada de áudio.
Para que seja possível implementar todos os recursos acima citados para o
datalink, é necessário contemplar uma série de requisitos de hardware e software.
Os requisitos de hardware são:
a) Interface elétrica necessária para o funcionamento do microcontrolador
PIC16F877;
b) Interface elétrica do LCD;
c) Interface de comunicação do circuito integrado MAX232;
d) Interface elétrica do led;
e) Interface de áudio do laptop para o rádio com divisor de tensão;
f) Interface de áudio do rádio para o PC;
g) Interface de acionamento do PTT (Push to Talk) do rádio;
Os requisitos de software são:
a) Uso em modo digital tipo RTTY para transmissão via rádio;
b) Filtragem e demodulação dos sinais recebidos;
c) Filtragem e modulação dos sinais enviados;
d) Mostrar em tela as mensagens enviadas e recebidas;
e) Mostrar em tela o espectro do sinal recebido e enviado, assim como seu
escopo de sintonia;
f) Escrever dados no LCD;
g) Prover comunicação serial entre o PC e a IHM;
h) Rotina de instrução do usuário;

42
4 ESPECIFICAÇÕES
Neste capitulo são apresentadas as especificações do software utilizado para
funcionamento do datalink, juntamente com seu detalhamento de funções e
funcionamento, as especificações do software da IHM, as especificações do
hardware e da estrutura do protótipo da IHM (Interface Homem Máquina), os
circuitos elétricos e interfaces.
O sistema datalink será dividido em dois módulos, a IHM e o software
MMTTY. A IHM deverá sempre ser acionada antes do software, ela será responsável
por realizar a interface inicial com o usuário, prover informações de status de
recebimento (Rx) e envio (Tx) do software, seguindo os seguintes passos:
a) Informar o usuário o processo de inicialização do módulo;
b) Informar ao usuário qual será o canal a ser utilizado no rádio e as respectivas
faixas de frequências para a operação do datalink;
c) Informar ao usuário qual conexão deverá ser utilizada para sua ligação ao PC;
d) Informar quais os parâmetros básicos a serem verificados e configurados no
software MMTTY antes do início de seu uso no sistema datalink;
e) Após o software ter sido iniciado, indicar o status de recebimento de dados
(Rx) ou envio de dados (Tx) do software.
O software MMTTY será responsável por realizar a interface final com o usuário,
disponibilizando o acesso ao envio e recebimento de mensagens pelo sistema
datalink.
4.1 ESPECIFICAÇÕES DO SOFTWARE MMTTY
O software escolhido para operação do sistema datalink, foi o software
MMTTY, desenvolvido por Makoto Mori, criador do também bem referenciado
software de análise de antenas MMANA-GAL. Makoto Mori é também conhecido por
sua sigla de radioamador JE3HHT.

43
Os critérios utilizados para a escolha do software acima citado levaram em
conta a facilidade de operação, qualidade no recebimento e envio de sinais, a
natureza de software livre, ou seja, sem necessidade de pagamento de licença para
uso, uso do modo digital de transmissão via rádio RTTY, quantidade de recursos
para personalização e compatibilidade com diversos sistemas operacionais. O
software MMTTY contemplou todos os critérios.
4.1.1 Funcionamento do software MMTTY
O software MMTTY tem como base de funcionamento modulação FSK ou
AFSK, utilizando o modo de transmissão digital via rádio RTTY para tal. Para o
sistema datalink será utilizado exclusivamente modulação AFSK juntamente com o
modo de transmissão digital via rádio RTTY.
O MMTTY basicamente recebe a mensagem a ser enviada em um campo de
sua tela principal, codifica os caracteres de entrada e através de modulação AFSK
juntamente com a placa de som do PC envia os dados já modulados para o rádio
transmissor através da saída de áudio da placa. O procedimento de recebimento da
mensagem é o inverso do citado acima, através da entrada de microfone da placa de
som do PC, o software recebe o sinal modulado em AFSK e interpreta os códigos,
gerando assim os caracteres e os exibindo em um campo de sua tela principal para
visualização do usuário.
4.1.2 Detalhamento do software MMTTY
Aqui serão demonstradas as características e interfaces do software, os
detalhes de seus elementos básicos e suas respectivas funções pertinentes a
utilização do datalink em cada tela.
As principais características e funções do software são:

44
Modula (codifica para a transmissão) RTTY utilizando a placa de som do
PC;
Demodula (decodifica) RTTY usando a placa de som do PC;
Utiliza DSP (Digital Signal Process) para detectar e demodular sinais de
RTTY, com inúmeras opções de controle;
Gera AFSK para transmissão através da entrada de microfone de um rádio
transceptor;
Gera FSK para a transmissão através da porta de entrada de alguns
rádios transceptores;
Opera o PTT (Push To Talk) do rádio, utilizando um pino da porta COM
FSK;
Oferece 16 botões de macro totalmente customizáveis que podem conter
texto e comandos;
Armazena até 64 mensagens de transmissão definidas pelo usuário, além
dos botões de macro;
Tem um programa simples de registro que automatiza algumas operações
de entrada de dados;
Permite ao usuário a personalização dos parâmetros de demodulação
utilizando DSP;
Mostra a entrada do sinal em um osciloscópio digital, exibido na tela do
PC;
Gravação e repetição dos sinais RTTY;
Registra os textos decodificados;
Oferece teclas de atalho customizáveis pelo usuário, a fim de simplificar
sua operação;
Tem um sistema de log simplificado, com importação e exportação;
Funciona como um modem quando visto por outros programas ou outros
softwares que utilizem RTTY.
Uma grande vantagem do MMTTY é a compatibilidade com diversas versões
de sistemas operacionais e os baixos requisitos para funcionamento, podendo ser
instalado em praticamente qualquer PC. Os requisitos mínimos de sistema para
funcionamento do software MMTTY, são:

45
a) Microsoft Windows® 95, 98, NT, ME, XP, Vista ou 7 (Seven);
b) Processamento de 155 MHz ou superior;
c) 8 megabytes de memória RAM ou superior;
d) Resolução de 640 x 480 pixels ou superior;
e) Placa de som de 16 bits soundblaster ou compatível (11.025 Hz, 16 bits).
A Figura 19 mostra a tela principal do software MMTTY, os campos distintos
da tela foram separados em vermelho e pelas letras A, B, C, D, E, F, G, H e I. Suas
respectivas funções são:
a) Tela (menu) para controle dos arquivos, edição, visualização, opções,
perfil do usuário, programas e arquivo de ajuda;
b) Botões de controle;
c) Parâmetros do demodulador e filtros;
d) Macros;
e) Telas de visualização do espectro e escopo do sinal;
f) Log para uso de radioamadorismo;
g) Campo de exibição de mensagens recebidas;
h) Macros;
i) Campo para escrita das mensagens a serem enviadas;
Fonte: SOFTWARE MMTTY Figura 19 – Tela principal do software MMTTY

46
O menu principal do software tem diversas funções, porém algumas das
opções podem ficar disponíveis somente após alguma ação ser efetuada. As
funções e suas atribuições podem ser vistas respectivamente nas Tabelas 3, 4 e 5
abaixo:
TABELA 3: Menu File
Função
Atribuições
Log Rx File Inicia o procedimento para gravar os caracteres que
aparecem na janela de recepção.
Options of Received-log Especifica o local do registro de recebimento e as opções
sobre a gravação a partir do momento que uma transmissão passa a ser recebida.
Send Text Envia um arquivo de texto.
RxWindow to File Salva o conteúdo da janela de recebimento para um
arquivo.
Open LogData File Abre o arquivo de Log.
Save Data now Salva os dados que estão na janela de log.
Record WAVE (mmv) immediately
Grava uma representação da entrada de áudio, salva a mesma como um arquivo wave de extensão mmv.
Record WAVE (mmv) as...
Grava o áudio de entrada, mas primeiro é necessário atribuir um nome ao arquivo.
Play WAVE(mmv) Toca o arquivo wave armazenado.
Seek Play position Procura a posição de reprodução do arquivo.
Rewind Play/Record Volta para o inicio do arquivo gravado.
Pause Play/Record Pausa o arquivo que esta sendo gravado, mas permanece
em posição para continuar a gravação.
Close Play/Record Para de gravar o arquivo, o salva e fecha.
Exit MMTTY Sai do Programa
Fonte: SOFTWARE MMTTY

47
TABELA 4 – Menu Edit
Função
Atribuições
Paste to TxWindow Cola o texto copiado na janela de transmissão.
Edit Macro Buttons Abre a tela de configuração do MMTTY, na guia TX, onde o
painel de botões macro é disponibilizado para edição.
Edit Messages Seleciona mensagens armazenadas para edição.
Assign ShortCut Keys Altera a atribuição dos atalhos das funções do programa.
Fonte: SOFTWARE MMTTY
TABELA 5 – Menu View
Função
Atribuições
Control Panel Faz o painel de controle aparecer ou desaparecer.
Control Panel size Redimensiona o tamanho do painel de controle.
Macro Buttons Alterna entre os botões de macro do teclado e visor linear.
FFT Display Faz o sinal FFT aparecer e desaparecer.
FFT Width Seleciona a banda do FFT.
FFT Sensitivity Varia a sensibilidade do FFT, low é o mais sensível.
FFT Response Varia a velocidade de resposta do FFT.
XYScope Faz a tela de elipses cruzadas do RTTY aparecer ou
desaparecer no osciloscópio.
XYScope Size Varia o tamanho da tela de elipses cruzadas para exibição.
XYScope Quality Varia a qualidade de exibição das elipses cruzadas no
osciloscópio.
Scope Mostra a amplitude do sinal pelo tempo.
Clear Rx Window Limpa a janela de recepção.
Show Button Hint Ativa ou desativa a exibição de popup quando o cursor
estiver sobre os botões.
LogData List Edita as entradas de log atuais.
Current QSO Data Edita os dados a serem registrados no QSO atual.
Fonte: SOFTWARE MMTTY

48
TABELA 6: Menu Option
Função
Atribuições
Soundcard output level Configura o nível de saída da placa de som.
Soundcard input level Configura o nível de entrada da placa de som.
Test Uma sequência de testes é executada através do MMTTY e aparece na janela de recepção, porém nada é enviado através da placa de som.
Disable transmission Não permite a transmissão, mesmo com os comandos dos
botões para tal.
Way to send Permite selecionar o envio por letra, palavra completa ou a
linha completa.
Autosend CR/LF with TX button
Transmite um CR/LF assim que a transmissão começar.
Word wrap on keyboard Mantém as letras de uma palavra juntas, quando chegar o fim da linha.
PTT timer Define o tempo máximo de ativação do PTT para
transmissão.
Running mode Inicia e para o modo de execução, que é configurado na
opção de registro.
Setup TNC emulation Configura o MMTTY para funcionar como se fosse um TNC.
Setup Logging Setup automático dos recursos de log.
Setup MMTTY Altera a maioria dos parâmetros de recepção e transmissão do MMTTY.
Fonte: SOFTWARE MMTTY
Ainda no menu, o software possui a aba Profiles, que permite a seleção de
diferentes perfis de funcionamento do software, além de permitir salvar o perfil do
usuário com os parâmetros escolhidos pelo mesmo.
A aba Program do menu, permite que o usuário ative algumas funções para
comunicação com outros softwares que utilizem modos digitais de transmissão via
rádio, e o menu Help, fornece um arquivo de ajuda para auxilio do usuário na
utilização do software MMTTY.
Na Figura 20 temos o quadro principal de controle, onde os botões FIG, UOS,
TX e TXOFF, têm respectivamente como funções:

49
Fonte: SOFTWARE MMTTY
Figura 20 – Quadro de Controle do software MMTTY
FIG: Controla a recepção e envio de letras e figuras, ele esta sob operação
exclusiva do programa. Em RTTY, letras e números compartilham os mesmos
códigos, a diferença entre eles é saber se a estação emissora enviou uma
letra ou outro caractere. Para esta diferenciação o software aciona o comando
FIG para diferenciar estas mudanças de caracteres.
UOS: (Unshift On Space), esta sob controle de ativação do usuário. O botão
UOS é utilizado para nos casos de perca de estado (letras ou figuras) durante
a decodificação dos caracteres, o software automaticamente se desloca para
o recebimento de letras, por ser o tipo de caractere mais utilizado. A ativação
do recurso UOS é recomendada.
TX: Pode ser ativado pelo usuário e pelo software, o acionamento do botão
inicia a transmissão de dados, juntamente com a ativação do PTT do rádio
transceptor. O não acionamento do botão significa que o software esta em
estado de recepção (Rx) e mantém o PTT do rádio transceptor desligado.
TXOFF: É comandado pelo usuário e interrompe a transmissão
imediatamente, indiferente de ter ou não terminado o envio da mensagem.
Na Figura 21 temos o quadro de configuração dos parâmetros de
demodulação, filtragem e envio do sinal.
Fonte: SOFTWARE MMTTY Figura 21 – Quadro de Demodulação, Filtragem e Nível de sinal

50
Suas funções são:
Mark – Mostra o tom de frequência de áudio utilizado para envio de marca
(representa o bit 1). Pode ser ajustando entre as frequências de 915 à 2125
Hz, porém o padrão de utilização é 2125Hz.
Shift – Mostra o espaçamento em frequência das frequências de marca (bit 1)
e espaço (representa o bit 0) . Pode ser ajustando entre as frequências de 25
à 850 Hz.
Baud Rate selector (Seletor de taxa Baud) – o padrão de utilização é 45.45
bauds. É um display mutifunções que se altera conforme o tipo de
demodulador selecionado, se o demodulador for IIR, irá exibir para ajuste
para BW, se o demodulador for tipo FIR, ira exibir ajustes para Tap e se o
demodulador for PLL irá exibir ajustes para o VCO.
AV ou LPF ou Loop – É outro display multifunções que se altera conforme o
tipo de demodulador selecionado, se o demodulador for IIR ou FIR, permitira
ajustes de AV e LPF e se o demodulador for tipo PLL, irá exibir ajustes para o
VCO.
A direita da tela de demodulação está os botões de demodulação, onde o
squelch é mostrado entre a segunda e terceira fila de botões. O “squelch” é a função
de um circuito eletrônico que suprime a saída de áudio (som) de um receptor de
rádio, quando não há um sinal de entrada forte o suficiente. Ele elimina os sinais de
áudio de baixa qualidade que podem estar presentes na/ou perto da frequência
sintonizada e só permite a entrada de sinais de áudio com boa qualidade. Abaixo
estão listadas as funções dos botões de demodulação e da barra do squelch.
Type – Seleciona o tipo de demodulador. Cada vez que for pressionado irá
alternar entre 3 tipo de demoduladores: (1) IIR, (2) FIR e (3) PLL. Ao acionar o
botão, os parâmetros de configuração se alteram para cada tipo de
demodulador.
Rev. – Altera a ordem de espaçamento entre as frequências de marca e
espaço. Quando o tom de frequência mais alto é o de marca, o tom de
espaço esta em uma frequência menor distanciado pelo shift. Já com o botão

51
Rev. ativo, esta condição é inversa, ou seja, a frequência do tom de áudio que
corresponde ao espaço é maior do que o tom de marca devidamente
espaçado pelo shift.
HAM – Altera os parâmetros de Mark e Shift para uma padrão pré
selecionado no menu de demodulação do MMTTY.
SQ – Representa o squelch. Pode ser utilizado para evitar a exibição de
caracteres aleatórios oriundos de ruído. O indicador entre a segunda e
terceira coluna de botões, logo abaixo do botão SQ, é o indicador de
intensidade do sinal. Nesta barra existe uma pequena linha vertical, ela é o
squelch. O squelch pode ser movido clicando na barra e movendo o cursor
para a direita ou esquerda, a barra se moverá conforme a direção do cursor.
A intensidade do sinal é mostrada pela cor verde, e quanto mais para direita
estiver, maior é sua intensidade. Quando a intensidade do sinal for maior que
a barra do squelch, o software exibirá na tela os caracteres decodificados do
sinal, mas se estiver abaixo da barra do squelch, o software não exibira nada.
O squelch poderá ser desativado quando estiver tentando decodificar um sinal
fraco e a exibição de caracteres provenientes de ruído não interferir na
mensagem final.
Not. – O botão ativa o DSP áudio notch filter (Filtro “não” de áudio por
Processamento Digital de Sinais). Ele pode ser usado para limitar as
frequências que chegam próximas as marcações de espaço e marca. Para
setar os pontos de frequência a serem atenuadas, basta ativar o botão not. e
clicar com o botão direito do mouse na tela FFT, no local onde deseja inserir o
filtro notch. Serão exibidos dois triângulos que indicam o centro do filtro onde
o sinal será fortemente atenuado.
BPF – (Band Pass Filter), representa um filtro-passa-banda. Ele pode ser
ajustado na aba options/ Setup MMTTY/ guia BPF demodulator. Este filtro
DSP está centrado no meio da banda de passagem mostrada na FFT. Para
ativá-lo basta pressionar o botão e para desativar o processo inverso.
ATC - Significa Automatic Threshold Control (Controle Automático de Limiar).
Esta função DSP, ajusta o nível de sinal de entrada no comparador. O ATC
pode não funcionar bem para níveis baixos de sinal.

52
NET – Sem o botão NET pressionado, o software transmite um tom de marca
na frequência de áudio do padrão HAM. Quando o botão é pressionado a
frequência de transmissão da marca, torna-se a mesma frequência de
recepção da marca, e a transmissão será exatamente na mesma frequência
da última recepção efetuada.
AFC – Significa Automatic Frequency Control (Controle Automático de
Frequência). Quando o botão é pressionado, o software varia a frequência de
recepção Mark, e o shift para ajustar o sinal recebido. Quando o AFC estiver
pressionado, é possível ajustar um sinal de RTTY recebido automaticamente.
A Figura 22 mostra o quadro onde são fixados os botões de controle de
Macros. Estes 16 botões podem ser programados para enviar qualquer tipo de
mensagem ou para realizar operações do software. Após definir as mensagens a
cada botão macro, ao selecioná-los a mensagem interna é automaticamente enviada
pelo software, podendo ser repetida a determinados intervalos de tempo.
A Figura 23 mostra o quadro referente ao FFT Display (Fast Fourier
Transformed), display da Transformada Rápida de Fourier do sinal. Este display
mostra a frequência do áudio enviado e recebido ao longo do eixo horizontal e sua
amplitude no eixo vertical. As duas barras verticais amarelas identificam as
frequências de marca e espaço, e a distância entre as duas barras, identifica o shift
entre as frequências.
Fonte: SOFTWARE MMTTY
Figura 22 – Quadro de fixação dos botões de macro – Software MMTTY
Fonte: SOFTWARE MMTTY Figura 23 – Display FFT – Software MMTTY

53
As Figuras 24 e 25 respectivamente mostram o display XY do software e o
display watterfall (cachoeira). O display XY é uma representação do computador de
um osciloscópio, mostrando duas elipses cruzadas, estas elipses representam a
correta sintonia do sinal RTTY. Para uma sintonia perfeita, uma das elipses deve
estar na vertical e a outra na horizontal, se elas não estiverem nos ângulos corretos
citados agora, significa que o shift de recepção é diferente do shift de transmissão
recebido.
O display watterfall (cachoeira) é uma representação gráfica do espectro de
frequência do sinal recebido e enviado, essa exibição pode ser utilizada para
sintonizar o sinal, ao invés de utilizar o botão AFC.
Fonte: SOFTWARE MMTTY
Figura 24 – Display XY – Software MMTTY
Fonte: SOFTWARE MMTTY
Figura 25 – Display Waterfall – Software MMTTY
4.1.3 Processos de demodulação de sinais do software MMTTY
O software MMTTY permite que o usuário escolha o tipo de demodulador que
será utilizado para converter os sinais de áudio do receptor em texto na tela do
computador. São oferecidos ao usuário três demoduladores: duas variações do
Demodulador Discriminador de Frequência (FIR e IIR) e um demodulador PLL.

54
4.1.3.1 Demodulador Discriminador de Frequência (FIR e IIR)
A Figura 26 mostra um diagrama de blocos de como funciona o processo de
decodificação para decidir se um dado sinal é uma marca ou um espaço. O
diagrama de blocos foi criado utilizando o Microsoft Power Point®.
Fonte: Autor
Figura 26 – Diagrama de blocos – Demodulador Discriminador de Frequência
O sinal torna-se um som no rádio que por sua vez é alimentado em um
limitador. Após o limitador, o sinal entra em dois ressonadores. Um deles, o
ressonador de marca é ajustado para 2125 Hz. O segundo, o ressonador de espaço
é sintonizado para 2295 Hz. A partir dos ressonadores, o sinal entra em dois
detectores que detectam o sinal e enviam o sinal resultante para um comparador. O
comparador irá decidir então, qual dos dois sinais é o mais forte (marca ou espaço).
Esse processo é feito constantemente e é auxiliado pelo uso de filtros para descartar
os sinais identificados como ruído. E é este o processo de demodulação do sinal
RTTY.
As variações de demodulação IIR (Infinite Impulse Response) e FIR (Finite
Impulse Response) são opções do bloco ressonador da figura acima. A
característica do demodulador IIR é semelhante ao de um filtro LC (Indutor-
Capacitor), já a característica do FIR, é que a fase do sinal é mantida linearmente,
ao contrario do filtro LC. Do mesmo modo os sinais de saída dos filtros de marca e
de espaço são detectados e comparados para decidir se o resultado final é um bit 0
ou 1.

55
4.1.3.2 Demodulador Phase Locked Loop – PLL
No demodulador PLL, um detector de fase ou frequência é utilizado para
manter a diferença de fase ou de frequência entre o sinal de entrada de áudio e um
oscilador com referência zero. O detector controla a frequência do oscilador de
referência alternando uma tensão DC (Direct Current). Essa mudança de tensão é
aplicada em um filtro passa-baixa ativo e ao integrador, o resultado determina se o
sinal será uma marca ou um espaço. O demodulador PLL é mais sensível a ruídos.
Assim como no demodulador discriminador de frequência, o diagrama de
blocos (criado no Microsoft Power Point®) referente a seu funcionamento pode ser
visto na figura 27.
Fonte: Autor
Figura 27 – Diagrama de blocos – Demodulador PLL
4.1.4 Filtros
Um exemplo das características de frequência dos filtros passa banda e notch
utilizados pelo software para demodulação do sinal através dos demoduladores FIR,
IIR e PLL, para as frequências de marca 2125 Hz e espaço 2295 Hz podem ser
vistos respectivamente nas Figuras 28 e 29.

56
Fonte: SOFTWARE MTTY
Figura 28 – Filtro passa banda – Software MMTTY
Fonte: SOFTWARE MTTY
Figura 29 – Filtro notch – Software MMTTY
4.2 ESPECIFICAÇÕES DO SOFTWARE DA IHM
As especificações do sistema embarcado da IHM serão representadas em
forma de diagrama de blocos e figuras criado no Microsoft Visio®. A IHM tem a

57
incumbência de informar ao usuário os parâmetros principais de configuração do
software datalink e informar ao usuário as mudanças em tempo real do status de
recebimento ou transmissão do mesmo.
Ao iniciar o sistema, a IHM irá sinalizar com o led vermelho que o sistema
está energizado. Após a energização do sistema, será executada uma sequência de
processos que podem ser visualizados na Figura 30.
Fonte: Autor
Figura 30 – Sistema embarcado da IHM

58
Os processos da Figura 30 podem ser divididos em:
a) Inicialização da IHM, Figura 31;
Fonte: Autor
Figura 31 – Inicialização IHM
b) Informação ao usuário da frequência de operação do rádio para
transmissão de dados, Figura 32;
Fonte: Autor
Figura 32 – Informação da frequência de operação do rádio ao usuário – IHM
c) Informação para o usuário referente ao canal a ser selecionado no rádio
VHF, Figura 33;
Fonte: Autor
Figura 33 – Informação de canal do rádio VHF ao usuário - IHM
d) Instrução ao usuário para conexão da interface de ativação do PTT do
rádio na porta COM 5 do PC, Figura 34;

59
Fonte: Autor
Figura 34 – Informação de conexão da interface PTT ao PC – IHM
e) Informação ao usuário do início das instruções de configuração do
software MMTTY, Figura 35;
Fonte: Autor
Figura 35 – Inicio das configurações do software MMTTY – IHM
f) Instrução ao usuário referente ao demodulador a ser escolhido no software
MMTTY, Figura 36;
Fonte: Autor
Figura 36 – Instrução para seleção do demodulador – IHM
g) Instrução ao usuário referente a seleção das frequências dos parâmetros
Mark e Shift do software MMTTY, Figura 37;
Fonte: Autor
Figura 37 – Instrução para seleção das frequências de Mark e Shift – IHM
h) Instrução ao usuário referente a seleção das frequências dos comandos
BW e Av. do software MMTTY, Figura 38;

60
Fonte: Autor
Figura 38 – Instrução para seleção das frequências de BW e Av – IHM
i) Instrução ao usuário para conexão da IHM na porta COM 4 do PC, Figura
39:
Fonte: Autor
Figura 39 – Instrução para conexão da IHM a porta COM 4 do PC – IHM
j) Informação ao usuário do termino da inicialização da IHM, liberando a
mesma para receber dados do software MMTTY, Figura 40;
Fonte: Autor
Figura 40 – Informação de Inicialização Concluída – IHM
Após a inicialização e correta conexão ao PC, a IHM estará pronta para
receber dados do software MMTTY, os caracteres enviados pelo software a IHM são
“-“ e “=”. Ao receber o caractere “=“ do software, a IHM imprime em tela a informação
de recepção de dados. Ao receber o caractere “-” do software, a IHM imprime em
tela a informação de transmissão de dados. Nas Figuras 41 e 42 é possível
visualizar as duas exibições na IHM.
Fonte: Autor
Figura 41 – Informação do Status de Recepção – IHM

61
Fonte: Autor
Figura 42 – Informação do Status de Transmissão – IHM
4.3 ESPECIFICAÇÕES DO HARDWARE
O hardware foi desenhado e simulado no software Proteus®. Sua
implementação foi efetuada considerando estes parâmetros simulados.
4.3.1 Interface elétrica do PIC16F877
O PIC16F877 é alimentado com 5volts nos pinos 11 e 32, e os pinos 12 e 31
são aterrados ao GND. O microcontrolador foi configurado para usar clock externo
de 4 MHz, para evitar ruídos junto com o cristal foi adicionado dois capacitores
cerâmicos de 22pF aterrados. No pino 1 é usado um resistor de pull-up, que consiste
em aplicar 5v usando um resistor de 10K ohms para limitar a corrente. Como pode
ser visto na Figura 43.
Fonte: Autor
Figura 43 – Interface elétrica do PIC16F877

62
4.3.2 Interface elétrica do display LCD 16x2
O display LCD escolhido possui 16 colunas e duas linhas de caracteres, é do
fabricante Winstar® e seu modelo é WH1602A. Como pode ser visto na Figura 44, o
display é alimentado com 5volts no pino 2, e aterrado ao GND no pino 1. Este
modelo apresenta a possibilidade de trabalharmos com 8 ou4 bits de dados. Pelo
fato de usar um menor número de pinos do microcontrolador será usado a
comunicação por 4 bits. Os pinos de dados D4, D5, D6, D7, RS e E são conectados
nos pinos do microcontrolador D4, D5, D6, D7, D2 e D3 respectivamente. Os pinos
D0, D1, D2, D3 e RW são aterrados ao GND. O pino VEE é responsável por definir o
contraste do display e é conectado a um potenciômetro de 10K ohms que possibilita
esta regulagem. Ainda o pino 16 é alimentado e conectado a uma chave para ativar
ou desativar a luz de fundo do LCD.
Fonte: Autor
Figura 44 – Interface elétrica do Display LCD

63
4.3.3 Interface elétrica do circuito integrado MAX232
Para que seja possível o microcontrolador se comunicar com o PC, é
necessário a utilização de um circuito integrado que adéque os níveis dos sinais
entre os dois dispositivos, para tal é usado o MAX232.
Como é possível observar na Figura 45, a comunicação assíncrona do
microcontrolador é realizada nos pinos C6 (Tx) e C7 (Rx), os mesmos são
conectados aos pinos 11 (Tin) e 12(Rout) do MAX232. A comunicação feita entre o
MAX232 e o PC, é feita a partir dos pinos 10 (Tin) e 9 (Rout). Na ligação com o PC
os pinos Tx e Rx são invertidos, ficando o Tx do MAX232 ligado ao Rx do PC, pois o
Tx realiza o envio de dados e o Rx o recebimento de dados.
Para que o circuito integrado funcione corretamente é necessário que o
mesmo seja ligado a 4 capacitores eletrolíticos de 10uF. O primeiro interligando os
pinos 1 e 3, com o pólo negativo voltado para o pino 3, o segundo interligando o pino
4 e 5, com o pólo negativo voltado para o pino 5, o terceiro interligando o pino 2 à
5volts com o pólo negativo voltado para os 5volts, e o quarto ligando o pino 6 ao
GND, com o pólo negativo voltado para o 6.
Fonte: Autor
Figura 45 – Interface elétrica do circuito integrado MAX232

64
4.3.4 Interface elétrica do LED
Como pode ser visto na Figura 46, o LED vermelho é ligado em série com um
resistor de 1K ohms, e é ligado diretamente na alimentação de entrada do circuito
juntamente com um capacitor eletrolítico. O led é acionado quando o circuito é
energizado.
Fonte: Autor
Figura 46 – Interface elétrica LED
4.3.5 Interface elétrica da conexão do áudio de saída do PC para o rádio
Como a maioria dos rádios VHF possuem entrada de áudio com amplitude
máxima na ordem de 50 à 80 microvolts DC e muitos modelos não possuem controle
de ajuste da tensão de entrada, se faz necessário utilizar um divisor de tensão entre
a saída de áudio do PC e a entrada de áudio do rádio VHF. A saída de áudio padrão
das placas de som dos PCs fornece uma tensão de 5volts DC. Para reduzir esta
tensão a uma margem aceitável na entrada no rádio, foi utilizado um divisor de
tensão 100 para 1. O mesmo foi construído com 1 resistor de 10K ohms em série
com a saída de áudio do PC e um resistor de 100K ohms em paralelo com a saída
de áudio do PC. O plugue utilizado foi um plugue de áudio de 3.5mm.
Os terminais dos rádios VHFs podem mudar de fabricante para fabricante. O
tipo de terminal utilizado neste projeto foi o RJ-45, que possui 8 pinos, o pino 4 é

65
ligado ao GND e o pino 5 que é o pino de recepção de áudio é ligado ao pino 2 da
saída de áudio do PC. Como convenção, o pino 2 do plugue 3.5mm será o pino com
sinal de áudio e o pino 1 será o pino GND. O esquema elétrico da interface pode ser
visto na Figura 47:
Fonte: Autor
Figura 47 – Interface elétrica da conexão do áudio de saída do PC para o rádio
4.3.6 Interface elétrica da conexão do áudio de saída do rádio para o PC
A interface elétrica para conexão do áudio de saída do rádio para o PC é feita
simplesmente conectando o pino 3 do conector do rádio ao pino 2 da entrada de
áudio do PC. O plugue de conexão utilizado novamente foi o plugue de 3.5mm. O
esquema de conexão da interface pode ser visto na Figura 48:
Fonte: Autor
Figura 48 – Interface elétrica da conexão do áudio de saída do rádio para o PC

66
4.3.7 Interface elétrica para ativação do PTT
O acionamento do PTT (Push-to-talk) é feito através da saída RTS da porta
COM/Serial RS232 do PC. O software no momento da transmissão envia um sinal a
saída RTS, este sinal é composto de uma tensão continua de 6volts. Como o
acionamento do PTT no rádio é feito através do aterramento do pino 6 da entrada do
rádio, foi necessário construir um circuito para quando receber a tensão de saída
RTS, chavear o circuito GND ao pino 6 para acionamento do PTT.
Este circuito pode ser visto na Figura 49. Para realizar o chaveamento
descrito acima foi utilizado um transistor NPN, modelo BC547, onde a base do
transistor é ligada em série com um resistor de 1K ohm e com o pino 7 (RTS) do
conector fêmea RS232. O emissor do transistor foi ligado ao GND e o coletor ligado
no pino 6 da entrada do rádio (pino de acionamento do PTT).
Fonte: Autor
Figura 49 – Interface elétrica para ativação do PTT

67
5 IMPLEMENTAÇÃO
Neste capitulo será descrito as técnicas e ferramentas utilizadas no
desenvolvimento do software, do hardware e dos testes realizados.
Em relação ao software, serão apresentados trechos do código fonte
desenvolvido para a IHM especificando as técnicas de programação utilizadas, a
configuração dos parâmetros para utilização do software MMTTY e sua
personalização para o uso em aeronaves.
Em relação ao hardware, serão demonstradas as ferramentas utilizadas na
construção estrutural e elétrica do protótipo da IHM, das interfaces de ativação de
comandos e comunicação utilizadas entre o rádio VHF e o PC e os materiais
utilizados.
5.1 IMPLEMENTAÇÃO DO SOFTWARE DA IHM
A implementação do sistema embarcado da IHM, foi realizada na linguagem
de programação C, usando o compilador PCW C Compiler®. A gravação do
microcontrolador foi realizada utilizando o módulo Picburner USB®, este módulo é
conectado via USB ao PC. O módulo Picburner USB® trabalha em parceria com o
programa US-Burn®, este programa carrega o arquivo hexadecimal gerado pelo
compilador e grava o mesmo no microcontrolador.
O sistema da IHM foi desenvolvido especificamente para o microcontrolador
PIC16F877. No desenvolvimento do software foram utilizados os seguintes recursos
do microcontrolador.
a) Interrupção interna #int_rda, recebimento de dados RS-232;
b) Comunicação serial RS-232;
c) Comunicação paralela com o display LCD.;

68
5.1.1 Comunicação serial RS-232 com o PC
O microcontrolador PIC16F877 possui um canal de comunicação assíncrona
nativo, para que seja possível o programa utilizar o canal serial é necessário rodar
uma rotina de inicialização. Nesta rotina é definido qual será a velocidade da
comunicação, se será utilizado bit de paridade, quais pinos do microcontrolador
serão usados, e de quantos bits será a comunicação. A rotina da função de
inicialização pode ser vista abaixo:
#use rs232(baud=9600,parity=N,xmit=PIN_C6,rcv=PIN_C7,bits=8);
Para receber dados via serial o sistema fica sempre monitorando a
interrupção #int_rda, esta interrupção pausa os processos do microcontrolador para
colher os dados que chegam ao canal serial.
5.1.2 Comunicação paralela com o display LCD
A comunicação com o display é feita com apenas 4 bits e os pinos Enable e
Register Select. Quando o LCD é ligado é necessário rodar uma rotina de
inicialização, esta rotina ira definir o modo de funcionamento do mesmo.
Para escrever dados no LCD é necessário enviar as informações em 2
pacotes de 4 bits. Primeiramente é necessário escolher no Register Select se a
informação que está sendo enviada é dados ou instrução, deixando este pino em
nível alto ou baixo respectivamente. Quando o barramento está carregado com uma
informação a ser enviada é necessário dar um pulso no Enable, para que o LCD leia
as informações presentes no barramento.
5.1.3 Funcionamento do software embarcado na IHM
O algoritmo implementado na IHM pode ser visto abaixo na Figura 50.

69
#include <ESCREVE LCD.h> #include <DRIVE_LCD_KS0066.c>
#int_RDA
void RDA_isr(void) { carac = rxreg;
}
void main()
{ inicializa_microcontrolador();
inicializa_lcd(); PRINTF(escreve_lcd,"\$ DATALINK RTTY \nINICIALIZANDO..."); delay_ms(3000);
PRINTF(escreve_lcd,"\$OPERE ENTRE(MHz)\n118.00 A 136.975"); delay_ms(2000); PRINTF(escreve_lcd,"\$UTILIZE O CANAL \n4 DO RADIO VHF");
delay_ms(2000); PRINTF(escreve_lcd,"\$CONECTE O PTT A \nPORTA COM5 DO PC"); delay_ms(2000);
PRINTF(escreve_lcd,"\$CONFIGURACOES DO \nSOFTWARE MMTTY:> "); delay_ms(2000); PRINTF(escreve_lcd,"\$DEMODULADOR: \nFIXE EM (IIR)");
delay_ms(2000); PRINTF(escreve_lcd,"\$MARK: 2125 Hz \nSHIFT: 170 Hz "); delay_ms(2000);
PRINTF(escreve_lcd,"\$BW: 60 Hz \nAV: 70 Hz"); delay_ms(2000); PRINTF(escreve_lcd,"\$CONECTE ESTE A \nPORTA COM4 DO PC");
delay_ms(2000); PRINTF(escreve_lcd,"\$INICIALIZACAO \nCONCLUIDA"); delay_ms(2000);
PRINTF(escreve_lcd,"\$"); while (TRUE)
{ IF (carac!=255) {
IF (carac=='-') { PRINTF(escreve_lcd,"\$ TRANSMITINDO \n DADOS ");
carac=255; }else IF (carac==171)
{ carac=32; PRINTF(escreve_lcd,"\b");
PRINTF(escreve_lcd,"%c",carac); PRINTF(escreve_lcd,"\b"); carac=255;
}else IF (carac=='=') {
PRINTF(escreve_lcd,"\$ RECEBENDO \n DADOS "); carac=255; }else
{ PRINTF(escreve_lcd,"%c",carac); carac=255;
} }
} }
Fonte: Autor
Figura 50– Algoritmo IHM

70
Após inicializar a IHM, o sistema informará automaticamente e em sequência
ao usuário, através do display LCD as seguintes informações.
a) DATALINK RTTY INICIALIZANDO;
b) OPERE ENTRE (MHZ) 118.00 A 136.975;
c) UTILIZE O CANAL 4 DO RADIO VHF;
d) CONFIGURAÇÕES DO SOFTWARE MMTTY:>;
e) DEMODULADOR: FIXE EM (IIR);
f) MARK: 2125 Hz SHIFT: 170 Hz;
g) BW: 60 Hz AV: 70 Hz;
h) CONECTE ESTE A PORTA COM4 DO PC;
i) INICIALIZAÇÃO CONCLUIDA;
Após estas etapas o sistema está pronto para receber dados, as
configurações implementadas foram para:
a) Quando receber o caractere “ = “, escreva em tela “ RECEBENDO
DADOS”;
b) Quando receber o caractere “ – “, escreva em tela “ TRANSMITINDO
DADOS ”;
c) Quando receber qualquer outro caractere, imprima os caracteres
recebidos em tela;
5.2 IMPLEMENTAÇÃO DO SOFTWARE MMTTY
O software MMTTY foi adquirido em sua versão 1.65D através do portal
http://www.hamsoft.ca/.
Uma das grandes vantagens da manipulação do software foi sua fácil
instalação, pois não necessitou de configurações avançadas para instalação e é
perfeitamente compatível com a maioria dos sistemas operacionais da plataforma
Microsoft Windows®.

71
Outra grande vantagem do software MMTTY é que as configurações de
operação ideal já vem pré fixadas no programa, o que para o usuário, acaba se
tornando uma comodidade na configuração dos parâmetros.
O software MMTTY possui uma vasta gama de configurações para ajustes,
este elevado número de configurações é disponibilizada, pois seu grande potencial é
trabalhar com o recebimento de dados “as cegas”, ou seja, receber dados na
modalidade RTTY sem saber quais foram os parâmetros configurados no software
transmissor.
O processo de configuração dos componentes do software para implantação
do sistema datalink foram definidos com praticidade, pois como se trata de um
sistema fechado, os parâmetros do software transmissor e de recebimento de dados
eram conhecidos e foram “igualados”, situação esta exigida pelo software para
funcionamento correto.
As configurações foram efetuadas após testes de comunicação entre dois
computadores, podendo encontrar assim as faixas de operação do software que
atendessem as necessidades do enlace de dados. Após os testes entre
computadores, foram efetuados testes utilizando o enlace entre Rádios VHF. O
equipamento de rádio utilizado para testes foi o rádio do fabricante Motorola®,
modelo GM-300.
5.2.1 Personalização da tela principal
Uma visão geral da tela principal do software com as personalizações para o
uso em aeronaves pode ser vista na Figura 51.

72
Fonte: SOFTWARE MMTTY
Figura 51– Tela principal personalizada - MMTTY
5.2.2 Configurações de visualização
As opções do menu View do software que foram selecionadas, podem ser
vistas na Figura 52 e estão descritas abaixo:
a) Control Panel, para mostrar a visualização do menu de controle na tela
principal;
b) Macro Buttons, para mostrar a visualização do menu de macros na tela
principal;
c) FFT Display, para mostrar o display FFT ao lado direito da tela principal, junto
com o display watterfall;
d) FFT Width setado em Auto, para amostragem de frequência automática na
criação do gráfico FFT;
e) FFT Sensivity setado em Highest, para sensibilidade máxima das
frequências na criação do gráfico FFT;

73
f) XY Scope, para mostrar na tela o visor de elipses cruzadas para sintonia do
sinal RTTY;
g) XY Scope size setado em Big, mostra o gráfico das elipses cruzadas em
tamanho grande na tela principal;
h) XY Scope Quality setado em Highest, para sensibilidade máxima das
freqüências na criação do gráfico de elipses cruzadas;
Fonte: SOFTWARE MMTTY
Figura 52– Personalização do menu View – MMTTY
5.2.3 Configurações de operação
As configurações de operação foram definidas através do menu Option do
software.
Para um correto nível de modulação da portadora do rádio VHF, a amplitude
do sinal de áudio transmitido pela placa de som do PC não deve ser muito baixa,
pois acarreta em grande número de erros, falhas na mensagem e até mesmo o não
recebimento de dados pelo software ao qual foi encaminhada a mensagem. A
amplitude do sinal de áudio também não deve ser muito elevada, pois pode
acarretar no saturamento da onda portadora do rádio VHF, ocasionando os mesmos
problemas criados pelo sinal de baixa amplitude.

74
Portanto, a configuração dos níveis de saída e entrada (microfone) de áudio
da placa de som do PC, devem ser selecionados entre 40 e 60% da amplitude
máxima. Estes valores podem ser alterados nos botões “Soundcard output level”,
“Soundcard input level”, ou ainda nos controles proporcionados pelo sistema
operacional do PC.
A opção de envio dos dados inseridos no software foi configurada através da
opção “Way to send”, a qual foi setada para “Line out”. Esta opção proporciona ao
usuário primeiramente inserir a palavra, frase ou texto completo, e somente após
pressionar o botão TX, a mensagem irá ser enviada.
Os rádios VHF geralmente pela sua alta potência de saída tendem a aquecer
excessivamente, podendo ocasionar dano a componentes e falhas de
funcionamento. Por este motivo se faz necessário limitar sua transmissão a curtos
períodos de tempo. Para controle do tempo de ativação do PTT (Push to talk) do
rádio VHF, o qual ativa seu transmissor, o software disponibiliza a opção PTT Timer,
a qual foi configurada para parada de transmissão em 60 segundos.
A Figura 53 ilustra as configurações descritas acima.
Fonte: SOFTWARE MMTTY
Figura 53– Personalização do menu Option – MMTTY

75
5.2.3.1 Configurações de operação – Setup MMTTY
A aba Setup MMTTY, localizada no menu Options do software, é o meio ao
qual o usuário tem acesso e controle aos parâmetros de operação e personalização
do software. As definições feitas neste Setup são refletidas em diversos campos da
tela inicial e principal do software, portanto as configurações da tela principal já
estarão sendo abrangidas no detalhamento deste.
Algumas das opções deste Setup foram mantidas conforme pré definição pelo
desenvolvedor do software. Elas já estão devidamente selecionadas e configuradas
para prover a eficiência e confiabilidade máximas necessárias para seu perfeito
funcionamento, portanto não necessitam de alterações.
Os parâmetros que necessitaram de ajustes ou correspondiam a funções que
não se adequaram ao funcionamento do sistema datalink proposto, foram
modificados e correspondem as abas Demodulator (Demodulação), Decode
(Decodificação), TX (Transmissão) e Misc (Diversos). As especificações
implementadas são:
a) Demodulator: A escolha do tipo de discriminador foi pelo ressonador IIR
(Infinite Impulse Response filter), o qual se demonstrou mais estável e
proporcionou maior confiabilidade na recepção dos dados. Suas
características de demodulação foram mantidas com os valores padrões de
uso em RTTY, Mark (Marca) em 2125 Hz, Shift (Desvio de frequência) em
170 Hz e BW (Largura de banda) em 60 Hz. O limite de amplificação do
demodulador foi definido em AGC, o qual realiza o controle automático de
ganho do sinal de entrada, a fim de reconstruir integralmente o mesmo. A
“suavização” do filtro passa baixa (smooth LPF) foi definida pelo circuito IIR
de ordem 5 com frequência de corte em 45 Hz, a configuração da frequência
de corte é predefinida pelo software. Os parâmetros dos pré filtros de passa
baixa e notch foram mantidos conforme definição do software. A definição de
frequência de Marca e Shift default “padrão” de funcionamento do software
foram introduzidas no campo HAM Default como 2125 Hz e 170Hz
respectivamente. As configurações de demodulação podem ser vistas na
Figura 54.

76
Fonte: SOFTWARE MMTTY
Figura 54 – Configurações de demodulação – Setup MMTTY
b) Decode: A taxa de transmissão do decodificador foi definida em 45 bauds (60
palavras por minuito), configurações acima deste valor se mostraram
ineficientes no envio da informação, devido à alta velocidade na transmissão,
o que acarretou perca de mensagens. Para evitar a chegada de erros nas
mensagens foi habilitada a opção de Majority logic (Lógica Majoritária), a qual
adiciona pulsos de sincronismo para cada mudança de estado dos dados
recebidos e enviados. As configurações de comprimento de bit, bit de parada,
paridade, bit padrão de parada no recebimento e código Baudot foram
mantidas conforme padronização do software e podem ser vistas na Figura
55.

77
Fonte: SOFTWARE MMTTY
Figura 55 – Configurações de decodificação – Setup MMTTY
c) TX: Definido o UOS (Unshift On Space) como ativo, a ativação da função
UOS permite ao software nos casos de perca de estado durante a
decodificação de caracteres, se deslocar para a posição de recebimento de
letras, que é o tipo de caractere mais utilizado. Definido a porta de comando
do PTT como a porta COM5, no momento do início da transmissão de dados
o software envia um comando ao pino RTS da porta COM para ativar o
acionamento do PTT. Definido os comandos de rádio para a porta COM4,
como o comando de rádio não será necessário, esta opção foi personalizada
para comunicação com a IHM, onde os dados de configuração da porta serial
foram selecionados conforme o padrão de inicialização da interface serial da
IHM. Os comandos de Init(Inicio), Rx (Recebimento) e Tx(Transmissão) foram
preenchidos com os caracteres de comando de recebimento e transmissão da
IHM. Como o status inicial do software é sempre em recepção, o comando Init
e Rx recebem o caractere “ = “, o qual imprime na IHM a informação de
recepção, já o comando TX recebeu o caractere “-“, que imprime na IHM a
informação de transmissão. Os comandos adjacentes da janela de comando
do rádio foram desabilitados. As definições dos botões de macro, callsign e de
entrada (Input Button) foram personalizadas para o uso em aeronaves e

78
contém pré-definidas frases e palavras prontas para facilitar o uso do software
pelo usuário. Os comandos adjacentes da janela de transmissão foram
mantidos como o padrão fornecido pelo software. As Figuras 56, 57, 58 e 59
ilustram respectivamente as telas de transmissão, comunicação entre o
software e a IHM, Input Buttons e Macros com as configurações acima
citadas.
Fonte: SOFTWARE MMTTY
Figura 56 – Configurações de transmissão – Setup MMTTY
Fonte: SOFTWARE MMTTY
Figura 57 – Configurações de comunicação MMTTY x IHM – Setup MMTTY

79
Fonte: SOFTWARE MMTTY
Figura 58 – Personalização de Macros (Input Button) – Setup MMTTY
Fonte: SOFTWARE MMTTY
Figura 59– Personalização de Macros (Macro) – Setup MMTTY
A função de cada um dos botões de macro e input button foram
personalizadas selecionando cada botão no Setup MMTTY, estas definições podem
ser alteradas pelo usuário mais facilmente através da tela principal, onde quando
selecionados com o botão direito do mouse os botões de macro e input Button
ficarão disponíveis assim como na tela de configuração do Setup. As funções dos
botões personalizados são as seguintes:
Identificador: Envia o código de identificação da aeronave;
Latitude: Envia a palavra “LATITUDE: “;
Longitude: envia a palavra “LONGITUDE: “;
Altitude: envia a palavra “ALTITUDE :”;
Velocidade: envia a palavra “VELOCIDADE :”;
Plano de vôo: envia a palavra “PLANO DE VOO: ”;
Combustível: envia a frase “QUANTIDADE DE COMBUSTIVEL ATUAL”;
Meteorologia: envia a frase “SOLICITANDO INFORMACAO DAS
CONDICOES METEOROLOGICAS PARA ROTA: “;
Aut. Decolagem: envia a frase “SOLICITANDO AUTORIZAÇÃO PARA
DECOLAGEM”;
Aut. Pouso: envia a frase “SOLICITANDO AUTORIZACAO PARA POUSO”;
Mudança Rota: envia a frase “SOLICITANDO MUDANÇA DE ROTA PARA: “;
Repetir Msg: envia a frase “REPITA A MENSAGEM”;

80
Frequência: envia a frase: “SOLICITANDO MUDANÇA DE FREQUENCIA
PARA: ”;
Msg. Recebida: envia a frase: “MENSAGEM RECEBIDA”;
Conf. Envio: envia a frase: “CONFIRME ENVIO DE MENSAGEM.”;
Emergência: envia a frase: “ DECLARANDO EMERGENCIA”;
Positivo: imprime na tela de envio a palavra: “POSITIVO”;
Negativo: imprime na tela de envio a palavra: “NEGATIVO”;
Msg. com erros: imprime na tela de envio a frase: “AS MENSAGENS ESTAO
SENDO RECEBIDAS COM ERROS, CONFIRME O ENVIO DESTE.”;
Msg. Corretas: imprime na tela de envio a frase “AS MENSAGENS ESTAO
SENDO RECEBIDAS CORRETAMENTE, CONFIRME O ENVIO DESTE.”;
d) Misc: As configurações da tela Misc (diversos) foram mantidas com as
configurações padrões do software, com exceção da fonte de áudio utilizada,
a qual foi definida como Mono para fazer o envio das informações através de
um único canal de áudio na saída da placa de som do PC. A Figura 60 ilustra
as configurações acima citadas;
Fonte: SOFTWARE MMTTY
Figura 60 – Configurações Diversas – Setup MMTTY

81
Para o funcionamento ideal do sistema datalink, todas as configurações acima
citadas deverão ser iguais, tanto para o software MMTTY que será usado na
aeronave, quanto para o software MMTTY que será utilizado pela estação em solo.
Apesar de poderem ser modificados a qualquer momento, a personalização
dos macros foi implementada para facilitar o uso do software MMTTY nas
aeronaves. Para a estação em solo os botões de macro ficaram sem personalização
devido a grande quantidade de avisos, mensagens e palavras que podem ser
armazenadas, desta forma o operador em solo poderá adequar o software para seu
uso com os dados que achar mais conveniente a seu uso.
Os botões de ativação na tela principal SQ(squelch), not. (filtro notch) e BPF
(filtro passa banda) deverão permanecer ativados, melhorando assim as condições
de filtragem do sinal recebido. A barra de squelch deverá ser mantida com as
configurações padrões do software, o qual a limita a 80% da amplitude máxima,
impedindo assim que a chegada de sinais fracos sejam decodificados
incorretamente, o que acarretará a impressão de erros na mensagem recebida.
Após a finalização da implementação das configurações, foi salvo o arquivo
“Configuração MMTTY – Datalink. pro” utilizando a guia Profile - Save to file. As
únicas configurações que não são armazenadas no profile são as personalizações
dos macros. O arquivo armazenado poderá ser carregado na guia Profile – Load
from file, este procedimento irá carregar no software MMTTY as configurações
salvas no arquivo, facilitando assim as definições quando necessária nova
instalação do software, alteração indevida das configurações já salvas ou instalação
em outro PC.
Uma visão geral da tela do software com as configurações finais
implementadas e com a sinalização da posição do cursor do squelch pode ser vista
na Figura 61.

82
Fonte: SOFTWARE MMTTY
Figura 61 – Personalização final e barra do squelch – MMTTY
5.3 IMPLEMENTAÇÃO DO HARDWARE
O desenvolvimento dos circuitos elétricos da IHM e das interfaces de
comunicação e ativação de comandos entre o rádio e o PC, foram primeiramente
realizados em ambiente simulado utilizando o programa Proteus® e posteriormente
manufaturados conforme o projeto.
Os seguintes materiais foram utilizados:
Display LCD 16x2;
Resistores diversos de ¼ Watt;
Led Vermelho 5mm;
Capacitores Eletroliticos de 10uF / 50V;
Cristal de 4mhz;
Microcontrolador PIC16F877
Soquete torneado 40 pinos para microcontrolador;
Capacitores cerâmicos de 22pF;

83
Barra de pinos;
Trimpot 10k ohms;
Circuito Integrado MAX232;
Placa de protótipo perfurada;
Cabos blindados de 6 vias;
Conectores fêmea e macho RS-232;
Flat Cables;
Conectores RJ-45;
Cabos de áudio blindados;
Transistor NPN BC547;
O protótipo da IHM foi manufaturado em duas unidades, sendo uma para o
uso na aeronave e a outra para o operador da estação no solo. A fim de facilitar os
controles do usuário, o protótipo foi acondicionado em um envoltório plástico, ao
qual foram adicionados botões para ligar e desligar o módulo, ligar e desligar a luz
de fundo do LCD e controle de contraste. Foi adicionado também um conector RS-
232 fêmea e conector para alimentação 5volts DC.
O protótipo da IHM finalizado pode ser visto na Figura 62 e 63
respectivamente.
Fonte: Autor
Figura 62 – Protótipo IHM – Interior

84
Fonte: Autor
Figura 63 – Protótipo IHM – Exterior
Os circuitos de entrada e saída do rádio, ativação do PTT, saída e entrada de
áudio do PC foram manufaturados em uma única placa para facilitar o uso pelo
operador. Todos os cabos utilizados na construção da interface são blindados para
evitar interferência de rádio freqüência, o que poderia deixar o sinal ruidoso. O
circuito de ativação do PTT pode ser visto em separado na Figura 64, e a interface
completa com as entradas do rádio, ativação do PTT, saída e entrada de áudio do
PC podem ser visualizadas na Figura 65.
Fonte: Autor
Figura 64 – Circuito de ativação do PTT

85
Fonte: Autor
Figura 65 – Interface Entrada/saída do Rádio x Saída e entrada de áudio PC + PTT
A montagem e fabricação de todos os elementos foram feitas a mão utilizando
ferramentas e equipamentos simples e de uso comum. Nenhum processo foi
industrializado.
O custo total dos materiais para cada IHM foi de R$ 95,00 (noventa e cinco
reais) e o custo total das interfaces de comunicação entre o PC e o rádio VHF foi de
R$ 30,00 (trinta reais). Ainda foi necessário adquirir cabos conversores USB x Serial,
pois os computadores atuais na sua maioria não possuem portas seriais, somente
USB. O custo de cada cabo foi de R$ 40,00 (quarenta reais) e para cada sistema
datalink foram utilizados dois cabos.
Portanto, o custo total para fabricação do sistema datalink foi de R$ 205,00
(duzentos e cinquenta reais).
5.4 TESTES
Os testes simulados foram realizados utilizando dois notebooks da fabricante
Hewlett-Packard®, dois rádios VHF do fabricante Motorola®, modelo GM-300, dois
cabos conversores USB x serial modelo 9037 do fabricante COMTAC® e duas
antenas para VHF.
Importante ressaltar o uso do rádio Motorola GM-300, a única característica
que diferencia este rádio em comparativo a um rádio de uso aeronáutico é sua faixa
de frequência de operação, porém ainda esta dentro da faixa de frequências VHF. O

86
uso, portanto do rádio VHF Motorola® GM-300 foi considerado como totalmente
compatível quanto as suas características para operação dos testes do sistema
datalink.
O software MMTTY foi instalado no sistema operacional dos dois notebooks,
sendo um Microsoft® Windows XP e o outro Microsoft® Windows Seven e foram
carregadas as configurações do arquivo “Configuração MMTTY – Datalink.pro” no
software. Os rádios VHF foram alimentados com 12volts e sintonizados no canal 4, o
qual referencia a frequência de 157.950 MHz.
O esquema de conexões e a concepção do sistema datalink pode ser
visualizado na Figura 66.
Fonte: Autor
Figura 66 – Sistema Datalink
Após as conexões físicas dos equipamentos terminadas, foram efetuados
vinte testes, dez de transmissão de dados e dez de recepção de dados através do
software MMTTY. Os testes foram realizados mantendo uma unidade do sistema
datalink (simulando a unidade da aeronave), realizando o enlace de dados com a

87
segunda unidade do sistema datalink (simulando a estação base em solo). Em dez
dos vinte testes efetuados o sistema foi posicionado próximo para a transmissão e
recepção de dados, e em dez testes foi embarcado em um veículo que possuía
sistema VHF de radiocomunicação e feito o enlace a uma distância de
aproximadamente 10 Km.

88
6 RESULTADOS
Os circuitos elétricos da IHM e das interfaces de comunicação entre o
notebook e o rádio se comportaram com estabilidade, sendo que em nenhum dos
testes efetuados o sistema apresentou falhas.
O software MMTTY se mostrou altamente eficaz na recepção e transmissão
dos dados, dando total controle e visualização ao usuário dos sinais e mensagens
recebidas e enviadas, o software se comportou conforme o esperado e dentro dos
parâmetros configurados. A estabilidade do sistema foi considerada um ponto forte,
sendo que em nenhum dos testes, mesmo com grandes períodos de tempo em
funcionamento, apresentou travamento ou reduziu a capacidade de processamento
do notebook, podendo ser utilizado paralelamente com diversas outras aplicações
em funcionamento no sistema operacional.
A ativação e desativação do PTT do rádio pelo software MMTTY, foi iniciada
em todos os testes imediatamente após a seleção para transmissão dos dados e
após o termino da transmissão, em nenhum dos testes o sistema apresentou falhas.
O software da IHM quanto ao seu funcionamento e velocidade de atualização
dos dados na tela funcionou conforme o projeto, a IHM nos processos de
inicialização demonstrou conforme esperado uma latência maior em apresentar os
dados de informação ao usuário, quando foi conectada durante este processo ao
notebook com o software MMTTY inicializado. Esta latência ocorre, pois quando
conectada nestas condições ao notebook, o software envia um comando para
atualização de status em tela, como a IHM ainda esta processando os dados de
informação ao usuário, o sistema ira processar os 2 comandos ao mesmo tempo.
Apesar de não ser uma característica que ira gerar falhas ao sistema, somente
lentidão até terminar a inicialização, a indicação de primeiramente inicializar a IHM e
após conectar ao micro é uma pratica que deve ser seguida conforme comprovado
nos testes.
O sistema datalink com todos os seus componente interligados demonstrou
alta confiabilidade, praticidade e foi capaz de transitar dados textuais codificados
entre os enlaces de rádio efetuados, atingindo assim êxito total no propósito da
transmissão de dados através de um equipamento rádio VHF.

89
7 CONSIDERAÇÕES FINAIS
Este trabalho apresentou o desenvolvimento de um sistema datalink, que tem
como incumbência realizar a transmissão de dados através da utilização de um rádio
VHF, e de um protótipo para informação ao usuário dos parâmetros do sistema e
visualização do status de transmissão ou recebimento de dados. Considerando os
objetivos propostos, todos foram plenamente atingidos.
O sistema datalink desenvolvido cumpriu com as necessidades de transitar
dados em tempo real com completa segurança e confiabilidade, teve baixo custo de
manufatura e possui interface fácil e intuitiva ao usuário. Considerando o êxito total
no desenvolvimento do sistema datalink e dos testes simulados, sua aplicação para
aeronaves de pequeno porte vem como um grande diferencial e opção para
melhorar a segurança e prover um meio de comunicação mais robusto que as
comunicações por voz, entre as companhias aéreas e suas aeronaves, e para a
utilização de usuários hobistas em aviação.
O padrão de funcionamento do sistema datalink desenvolvido ainda
proporciona que seja implementado em outros meios que utilizem comunicação
VHF, como veículos, embarcações, comunicação ponto a ponto por empresas, etc...
Como sugestão para trabalhos futuros:
A implementação de um teclado na IHM, com funções pré definidas em cada
tecla para envio de mensagens, otimizando uso do sistema datalink;
A substituição do uso de um PC para manipulação do software por um
dispositivo menor, como celulares, pda’s, tablets, etc..., proporcionando assim
maximização de espaço e peso, condições importantes em aeronaves;
A implementação de novo software capaz de transitar dados como imagens,
vídeos e informações gráficas como um todo;
A utilização de outra modalidade digital para transmissão dos dados;
A adição de ferramentas de criptografia, proporcionando maior segurança na
veiculação de mensagens;
A utilização de um Processador DSP no lugar do PIC16F877;

90
REFERÊNCIAS BIBLIOGRÁFICAS
BRASIL. Ministério da Defesa. Comando da Aeronáutica. Departamento de Controle do Espaço Aéreo. ICA 102-9, de 11 de janeiro de 2005. Características Mínimas dos Equipamentos NAV/COM a Bordo de Aeronaves que Utilizam o Espaço Aéreo sob Jurisdição do Brasil. Disponível em <http://publicacoes.decea.gov.br/?i=publicacao&id=2575>
BRASIL. Ministério da Defesa. Comando da Aeronáutica. Departamento de Controle do Espaço Aéreo. RCA 102-1, de 10 de junho de 2010. Regulamento do Serviço de Telecomunicações do Comando da Aeronáutica. Disponível em <http://publicacoes.decea.gov.br/?i=publicacao&id=3512>
CARVALHO, Rogério Muniz. Princípios de comunicações. 3 ed. Vitória: Editado
pelo autor, 2003.
FORD, Steve. HF DIGITAL HANDBOOK. 4 ed. USA, ARRL’s, 2008.
HAYKIN, S. Sistemas de Comunicação Analógicos e Digitais. 4. ed. [S.l]:
Bookman, 2004.
HUMBERTO, Marcio. Modos Digitais: Teoria e uso. Disponível em <
http://www.araucariadx.com/site/informativo/MODOS_DIGITAIS%20_PS7TKS.pdf> Acesso em: 15 mai. 2011.
LASKOSKI, Gustavo Theodoro; MARCONDES, Maicon; SZEREMETA, Oscar. MODULAÇÃO DIGITAL. In: Universidade Tecnológica Federal do Paraná,
Departamento Acadêmico de eletrônica, 2006.
MEDEIROS, Julio César de Oliveira. Princípios de telecomunicações: teoria e prática. 2. Ed. São Paulo: Érica, 2007.
MIYOSHI, Edson Mitsugo; SANCHES, Carlos Alberto. Projetos de Sistemas de Rádio. 3. ed. [S.l] : Érica, 2006.
NASCIMENTO, J. Telecomunicações. [S.l]: Mackron Books, 1992.
NICOLAU, Sérgio. DATALINK e FANS: Tecnologia de comunicações em Aeronaves. 2009. Monografia (Licenciatura em Engenharia Eletrotécnica e de Computadores)

91
NICOLOSI, Denys E. C. Laboratório de microcontroladores família 8051: treino
de instruções, hardware e software. 3 ed. São Paulo, Érica, 2002.
PEREIRA, Fábio. Microcontroladores PIC: Técnicas Avançadas. São Paulo: Érica, 2002.
PEREIRA, Fábio. Microcontroladores PIC: Programação em C. 5 ed. São Paulo: Érica, 2003.
PY6TL; PY7AW. Modalidade RTTY. Disponível em <
http://www.gforum.tv/board/667/38380/modalidade-rtty.html> Acesso em: 7 jun. 2011.
SADIKU, M. N. O. Elementos de Eletromagnetismo. 3. ed. [S.l] : Bookman, 2004.
SOUZA, David José de. Desbravando o PIC. 6. ed. São Paulo: Érica, 2006.
SOUZA, David José de; LAVINIA, Nicolás Cesar. Conectando o PIC 16F877A:
Recursos Avançados. 3 ed. São Paulo: Érica, 2003.
VHF. In: ENCICLOPÉDIA ENCARTA. Microsoft Inc., 2008.
ZANCO, Wagner da Silva. Microcontroladores PIC: Técnicas de software e hardware para projetos de circuitos eletrônicos com base no PIC 16F877A. 1 ed. São Paulo: Érica, 2006.