
taller de fisica
12
4 UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN FACULTAD DE CIENCIAS-ESCUELA DE FÍSICA FÍSICA MECÁNICA MÓDULO #6: LA LEY DE INERCIA Diego Luis Aristizábal R., Roberto Restrepo A., Tatiana Muñoz H. Profesores, Escuela de Física de la Universidad Nacional de Colombia Sede Medellín Temas El concepto de Torque Ley de inercia para partículas (traslación): Primera ley de Newton. Ley de inercia para cuerpos rígidos (traslación y rotación). Algunas cosas de interés. El concepto de torque En los módulos anteriores se profundizó suficientemente sobre el concepto de fuerza; este concepto podría ser suficiente para lograr realizar el análisis de la traslación de los cuerpos, sin embargo, es necesario complementarlo con el concepto de torque para facilitar el análisis de la rotación de éstos. Definición de torque Sea O un punto cualquiera, una fuerza y P su punto de aplicación. Se denomina torque de una fuerza respecto al punto O, al producto vectorial , Figura 1. La magnitud del torque es, es decir, la magnitud se calcula como, En donde b se denomina brazo de palanca y es igual a la distancia que hay desde el punto O hasta la línea de acción de la fuerza F, Figura 1 (c). En palabras,
-
Upload
luisa-quinto -
Category
Documents
-
view
41 -
download
0
description
taller de física recuperación
Transcript of taller de fisica

UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍNFACULTAD DE CIENCIAS-ESCUELA DE FÍSICA
FÍSICA MECÁNICAMÓDULO #6: LA LEY DE INERCIA
Diego Luis Aristizábal R., Roberto Restrepo A., Tatiana Muñoz H.Profesores, Escuela de Física de la Universidad Nacional de Colombia Sede Medellín
Temas El concepto de Torque Ley de inercia para partículas (traslación): Primera ley de Newton. Ley de inercia para cuerpos rígidos (traslación y rotación). Algunas cosas de interés.
El concepto de torque
En los módulos anteriores se profundizó suficientemente sobre el concepto de fuerza; este concepto podría ser suficiente para lograr realizar el análisis de la traslación de los cuerpos, sin embargo, es necesario complementarlo con el concepto de torque para facilitar el análisis de la rotación de éstos.
Definición de torque
Sea O un punto cualquiera, una fuerza y P su punto de aplicación. Se denomina torque de
una fuerza respecto al punto O, al producto vectorial , Figura 1.
La magnitud del torque es,
es decir, la magnitud se calcula como,
En donde b se denomina brazo de palanca y es igual a la distancia que hay desde el punto O hasta
la línea de acción de la fuerza F, Figura 1 (c). En palabras,
“La magnitud del torque de una fuerza respecto a un punto O, es igual al producto de la magnitud de la fuerza por el brazo de palanca”
Observar que si la fuerza se desliza a través de su línea de acción, el torque no varía: aquí la fuerza es un vector deslizante.
La unidad del torque en el SI es el N.m.

Como el torque es un producto vectorial, su dirección es perpendicular al plano donde se
encuentran los vectores y , y su sentido el indicado por la regla de la mano derecha, Figura 1 (recordar la definición de producto vectorial tratada en el módulo # 2).
(a) (b) (c)
Figura 1
Torque de una fuerza respecto a un punto O: caso en el plano (dos dimensiones)
En la Figura 2 se ilustra la forma de calcular el torque cuando el punto O y la fuera se encuentran en el plano de esta hoja, que se hará corresponder con el plano XY. El torque apunta en la dirección perpendicular a esta hoja, la cual corresponde al eje z: si apunta en dirección del
versor se consideró positivo (sentido contrario del giro de las manecillas del reloj) y negativo
en el sentido contrario (sentido del giro de las manecillas del reloj). Si el brazo de palanca es entonces la magnitud del torque se calcula con la expresión [2],
Figura 2
Interpretación física del torque
El torque de una fuerza respecto a un punto O es una medida de la tendencia de la fuerza a hacer rotar el cuerpo (sobre el cual actúa la fuerza) alrededor del eje fijo que es perpendicular al plano definido por la fuerza y el brazo de palanca y que pasa por el punto O (es decir, el eje tiene la dirección del torque).

Ejemplos
Ejemplo 1:
Calcular el torque de la fuerza respecto al punto O, Figura 3. La magnitud de la fuerza es igual a 10,0 N y el segmento OP mide 8,00 m.
Figura 3
Solución:
El brazo de palanca de la fuerza es,
por lo tanto la magnitud del torque es,
Se está considerando positivo en dirección , por lo tanto el resultado con signo asignado será igual a -40,0 N.m. Vectorialmente,
Ejemplo 2
Calcular el torque de la fuera respecto al punto O, Figura 4. La magnitud de la fuerza vale 10,0 N y el segmento OP mide 8,00 m.

Figura 4
Solución:
Se observa que la línea de acción de la fuerza pasa por el punto y por lo tanto el brazo de palanca es igual a cero. Con base en esto se concluye que,
Ejemplo 3
Calcular el torque resultante respecto al punto O debido a las fuerzas y , Figura 5. Las magnitudes de estas fuerzas son respectivamente 10,0 N y 20,0 N; los segmentos OP y OQ miden respectivamente 6,00 m y 4,00 m.
Figura 5
Solución:
El brazo de palanca de la fuerza es,
por lo tanto la magnitud del torque de respecto a O es,

El brazo de palanca de la fuerza F2 es,
por lo tanto la magnitud del torque de F2 respecto a O es,
Se está considerando positivo en dirección , por lo tanto el torque resultante es,
Es decir la magnitud del torque resultante es igual a 31,7 N.m, su dirección y sentido es el del
versor .
Ley de inercia para partículas (traslación): Primera ley de Newton
Newton formuló las conocidas tres leyes de movimiento (primera ley de Newton o ley de inercia, segunda ley de Newton o ley de la fuerza y tercera ley de Newton o ley de acción-reacción) y la ley de gravitación universal. Estas se enuncian esencialmente para partículas.
La ley de acción y reacción se trabajó en el módulo 3 y la ley de gravitación en el módulo 4. Aquí se trabajará sobre la ley de inercia. En esta sección se aplicará a partículas y en la próxima sección a cuerpos rígidos.
Ley de inercia (primera ley de Newton)
“Todo cuerpo (partícula) permanece en su estado de reposo, o de movimiento uniforme en línea recta, excepto si sobre él actúan fuerzas”. En otros términos, se podría decir: “Un cuerpo (partícula) sobre el cual no actúan fuerzas o si éstas actúan se anulan, se
mueve con constante”. Si el vector velocidad es constante, su dirección es constante y el movimiento es rectilíneo, además su magnitud también es constante y el movimiento es uniforme.
El reposo es sólo un caso particular, = 0.
Otra forma de enunciarla es: “Un cuerpo (partícula) sobre el cual no actúan fuerzas o si actúan se anulan, se mueve en línea recta con rapidez constante o permanece en reposo si lo estaba”.
Es necesario concluir que como se está hablando de una única velocidad, se está refiriendo a un cuerpo puntual, es decir, a una partícula. La pregunta básica será: ¿respecto a cuál marco de referencia se mide esa velocidad? Y surge una gran dificultad: un mismo cuerpo puede estar en reposo respecto a un cierto marco de referencia, moviéndose con velocidad constante respecto a otro y moviéndose aceleradamente respecto a otro diferente, entonces, ¿en cuál marco se aplica la primera ley? La respuesta no es obvia y parece redundante: estos marcos de referencia deben tener la característica de ser INERCIALES, en los que la característica es que la ley de inercia se cumple en ellos; con base en esto la ley de inercia se puede enunciar así:

“Existen ciertos marcos de referencia, llamados inerciales, respecto a los cuales un
objeto, sobre el cual la fuerza neta es nula, se mueve con constante”.
Del concepto de velocidad relativa puede verse inmediatamente que si un determinado marco de referencia es inercial, cualquier otro marco que se traslade con vector velocidad constante respecto al primero, será también inercial.
Resumiendo:
Dado un marco de referencia inercial si,
el cuerpo (partícula) se traslada en línea recta con rapidez constante o permanece en reposo si lo estaba.
Nota: Cualquier cuerpo rígido que se encuentre fijo a la superficie terrestre se comporta de forma muy aproximada como un marco de referencia inercial para el análisis mecánico de situaciones físicas locales.
El concepto de equilibrio
Cuando un cuerpo se encuentra en reposo respecto a un determinado marco de referencia inercial, se dice que está en equilibrio estático; si se mueve con velocidad constante se dice que se encuentra en equilibrio dinámico.
Ley de inercia para cuerpos rígidos (traslación y rotación)
Cuando el sistema de partículas para analizar cumple el modelo de cuerpo rígido, es necesario analizar tanto la traslación como la rotación. En la sección anterior se analizó el movimiento de los cuerpos bajo el modelo de partícula, por lo que solo interesaba analizar la traslación: una partícula no puede rotar.
Condiciones de equilibrio de un cuerpo rígido
Si un cuerpo rígido se encuentra en reposo en un marco inercial de referencia, se cumple que
la suma de las fuerzas externas que actúan sobre él se anula:
(Equilibrio de traslación)
y la suma de torques externos, respecto a un punto cualquiera O (este punto es arbitrario), se anula:
(Equilibrio de rotación)
Esas condiciones, llamadas condiciones de equilibrio de un cuerpo rígido, son condiciones necesarias para que el cuerpo se encuentre en reposo en un marco inercial. Es decir, si un cuerpo está en reposo, con plena seguridad se cumplen dichas condiciones. Más aún, si inicialmente estaba en reposo y se cumplen esas condiciones, permanecerá en reposo. Pero las condiciones no son suficientes para garantizar que el cuerpo esté en reposo. Es decir, perfectamente pueden cumplirse esas condiciones y sin embargo el cuerpo puede estarse moviendo con movimiento rectilíneo uniforme del centro de masa y rotando, por ejemplo alrededor de un eje que pasa por su centro de masa con velocidad angular constante. Pero en esta parte del curso sólo se analizará el caso en el que cuerpo rígido está en reposo, es decir, el equilibrio estático del cuerpo rígido.
Algunas cosas de interés
Sistemas equivalentes de fuerzas
En general el movimiento de un cuerpo rígido está determinado por la fuerza total y por el torque total que actúan sobre él. Se dice que dos sistemas o conjuntos de fuerzas que actúan sobre un cuerpo rígido son equivalentes si su fuerza total y su torque total respecto a cualquier punto son iguales: por lo tanto producen el mismo resultado en lo que concierne al movimiento o al equilibrio de éste.
Centro de gravedad
El peso de una partícula de masa m es la fuerza de atracción gravitacional hecha sobre ella por el planeta tierra, cuando la partícula está muy cerca de la superficie terrestre. Esa fuerza tiene un
punto de aplicación claro, la propia partícula, y es vertical hacia abajo. Si es el vector
aceleración de la gravedad, el peso es , Figura 6.
Figura 6
El peso de un cuerpo extenso es un concepto más complejo. Si se considera el cuerpo como un
sistema de partículas de masas , el peso del cuerpo es un sistema de fuerzas , Figura 7.

Figura 7
Estas fuerzas son paralelas entre sí ya que localmente se puede considerar constante la aceleración de la gravedad en magnitud y dirección. Como se puede observar, el peso de un cuerpo extenso no es una fuerza única, sino un sistema de fuerzas actuantes en cada una de las partículas que conforman el cuerpo. Este sistema de fuerzas tiene un sistema equivalente
formado por una ÚNICA fuerza que es igual a , en donde corresponde a la masa total y la cual está aplicada en el centro de gravedad del cuerpo (puede demostrase que, en estos casos, corresponde al centro de masa del cuerpo), Figura 8.
Figura 8
Par de fuerzas (CUPLA)
Uno de los sistemas de fuerzas más importantes es el formado por dos fuerzas de igual magnitud, dirección contraria y líneas de acción paralelas, Figura 9. Se llama un par de fuerzas o simplemente un par.
Figura 9
Este sistema de fuerzas, está caracterizado por una fuerza total nula y por un torque o momento
, perpendicular al plano de las dos fuerzas y con una dirección de giro asociada en ese plano que

es, claramente, la dirección en la cual las dos fuerzas tienden a hacer girar el cuerpo sobre el que actúan. La magnitud de este torque es igual a,
en donde d es la distancia entre las líneas de acción de estas dos fuerza, Figura 10.
Figura 10
El efecto de un PAR de fuerzas (o CUPLA) actuando sobre un cuerpo rígido SÓLO es de rotación.
Son ejemplos de aplicaciones de CUPLAS sobre cuerpos rígidos: el giro de una llave en la cerradura; el abrir la llave del grifo; el girar el timón de un vehículo; el rotar el botón del volumen del radio.
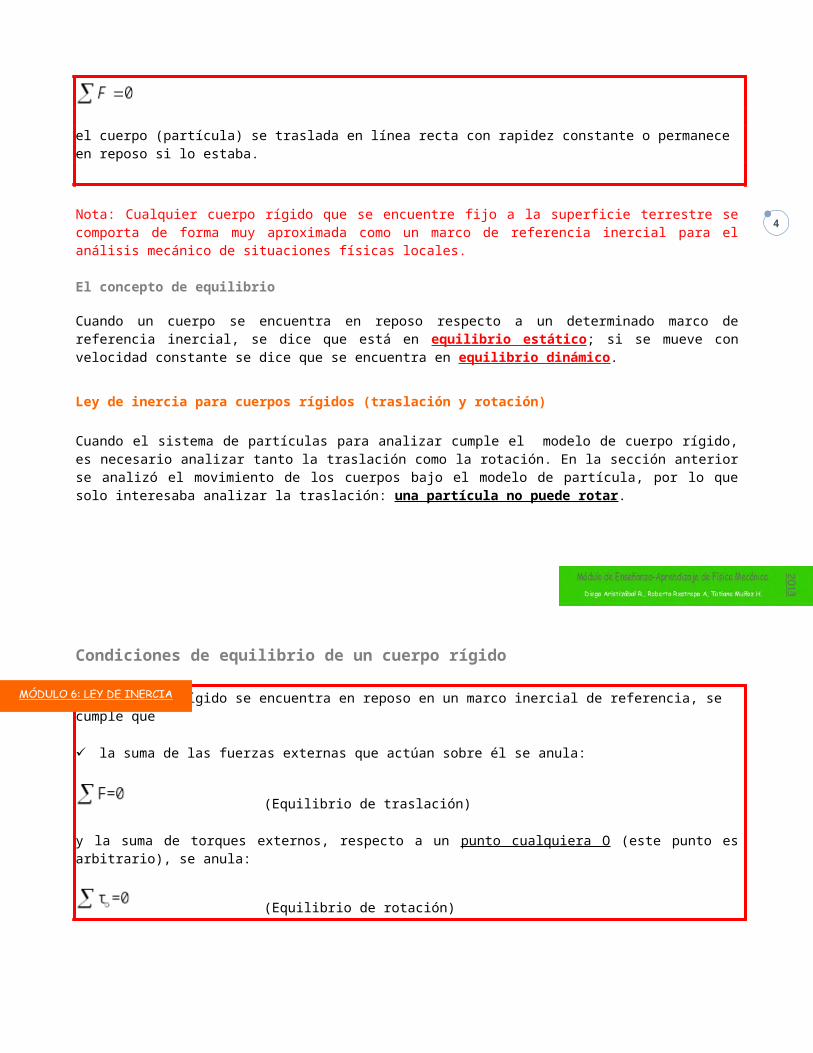
Una rueda o una polea que giran alrededor de su eje experimentan en mayor o menor grado complejas fuerzas de fricción hechas por el eje. Pero esas fuerzas tienen como sistema equivalente un par o torque de fricción. La fricción con un eje se da pues, no como una fuerza, sino como un par o torque de fricción que se opone al movimiento de rotación del cuerpo, es decir a su velocidad angular. En la Figura 11 se ilustra el diagrama de fuerzas sobre una polea en la cual no se desprecia la fricción en el eje: esta fricción es ejercido por múltiples pares de fuerza de reacción que ejerce el eje sobre la polea y que se pueden reemplazar por un torque de
fricción .
Figura 11
Cuerpo rígido en equilibrio bajo la acción de dos fuerzas

Si un cuerpo rígido se encuentra en equilibrio estático bajo la acción de dos fuerzas, éstas tienen que ser de igual magnitud, sentido contrario y colineales, es decir, tienen la misma línea de acción. Demostrarlo.
Cuerpo rígido en equilibrio bajo la acción de tres fuerzas
Si un cuerpo rígido se encuentra en equilibrio estático bajo la acción de tres fuerzas no colineales, éstas deben pertenecer al mismo plano y si no son paralelas, tienen que ser concurrentes, es decir las tres líneas de acción se cortan en un punto. Demostrarlo.
Nota: Si las fuerzas que actúan sobre un cuerpo rígido son concurrentes, éste se puede asimilar como si fuera una partícula.
Taller
1. Calcular el torque total respecto al punto O del conjunto de tres fuerzas representadas en la Figura 12.
Rp. 10,2 N.m
Figura 12
2. En la Figura 13: (a) Calcular el torque de la fuerza F1 respecto a E.(b) Calcular el torque de la fuerza F2 respecto a B. (c) Calcular el torque de la fuerza F3 respecto a A.
Rp. (a) 1 000 N.m (b) - 4 200 N.m (c) 2 400 N.m
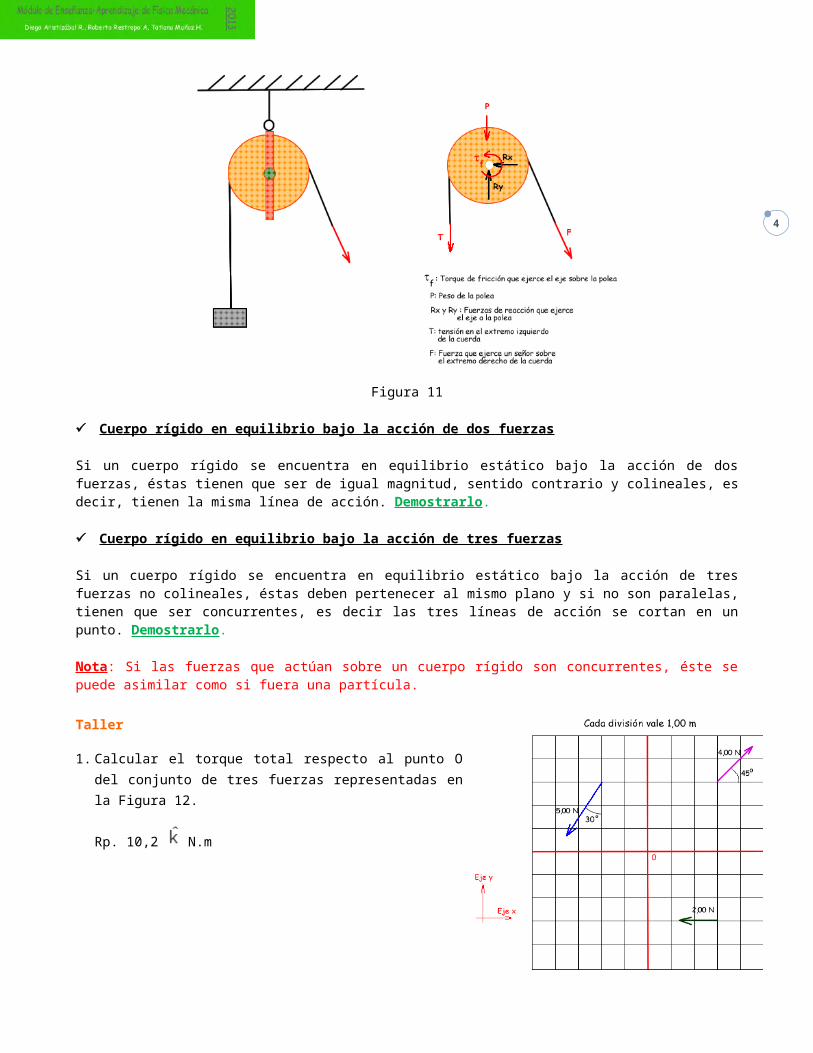
Figura 13
FIN


















