
Survei EM-Processing Dan Interpretasi Data MT_2
29
BAB I PENDAHULUAN 1.1 Latar Belakang Metode Magnetotellurik (MT) adalah metode geofisika pasif yang digunakan untuk mengetahui keadaan bawah permukaan dengan menggunakan induksi elektromagnetik di bawah permukaan bumi. Sumber dari MT ada dua yaitu solar wind dan lightening activity. Pada dasarnya metode MT ini berlandaskan pada prinsip gelombang elektromagnetik. Gelombang elektromagnetik adalah gelombang yang perambatannya tidak membutuhkan medium. Pada saat kedua sumber MT yaitu solar wind dan lightening activity mendekati bumi maka medan magnetic bumi yang awalnya konstan akan berubah-ubah akibat diganggu oleh kedua sumber tersebut. Perubahan medan bumi ini akan menghasilkan arus listrik dan medan listrik. Arus listrik ini biasa disebut arus eddy. Timbulnya arus eddy menyebabakan terjadinya medan magnetic sekunder. Medan listrik dan medan magnetic sekunder inilah yang direkam pada pengukuran MT. Dalam survey geofisika menggunakan metoda elektromagnetik (EM) sifat fisik yang relevan adalah konduktivitas atau resistivitas (tahanan-jenis) batuan. Beberapa studi menunjukkan adanya kaitan erat antara tahanan-jenis dengan porositas, kandungan fluida (air atau gas) dan temperatur formasi batuan. Pengaruh masing-masing faktor tersebut terhadap tahanan-jenis formasi batuan sangat kompleks karena dapat saling tumpang-tindih (overlap). Namun secara umum porositas tinggi yang disertai kandungan gas biasanya dicirikan oleh tahanan-jenis yang 1 | Page
-
Upload
winariyanto -
Category
Documents
-
view
265 -
download
12
description
Survei
Transcript of Survei EM-Processing Dan Interpretasi Data MT_2

BAB I
PENDAHULUAN
1.1 Latar Belakang
Metode Magnetotellurik (MT) adalah metode geofisika pasif yang digunakan untuk
mengetahui keadaan bawah permukaan dengan menggunakan induksi elektromagnetik di
bawah permukaan bumi. Sumber dari MT ada dua yaitu solar wind dan lightening activity.
Pada dasarnya metode MT ini berlandaskan pada prinsip gelombang elektromagnetik.
Gelombang elektromagnetik adalah gelombang yang perambatannya tidak membutuhkan
medium. Pada saat kedua sumber MT yaitu solar wind dan lightening activity mendekati
bumi maka medan magnetic bumi yang awalnya konstan akan berubah-ubah akibat diganggu
oleh kedua sumber tersebut. Perubahan medan bumi ini akan menghasilkan arus listrik dan
medan listrik. Arus listrik ini biasa disebut arus eddy. Timbulnya arus eddy menyebabakan
terjadinya medan magnetic sekunder. Medan listrik dan medan magnetic sekunder inilah
yang direkam pada pengukuran MT.
Dalam survey geofisika menggunakan metoda elektromagnetik (EM) sifat fisik yang
relevan adalah konduktivitas atau resistivitas (tahanan-jenis) batuan. Beberapa studi
menunjukkan adanya kaitan erat antara tahanan-jenis dengan porositas, kandungan
fluida (air atau gas) dan temperatur formasi batuan. Pengaruh masing-masing faktor
tersebut terhadap tahanan-jenis formasi batuan sangat kompleks karena dapat saling
tumpang-tindih (overlap). Namun secara umum porositas tinggi yang disertai kandungan gas
biasanya dicirikan oleh tahanan-jenis yang relatif lebih tinggi. Sebaliknya jika
fluidanya berupa air dengan temperatur tinggi − seperti dijumpai di daerah prospek
geotermal − maka hal tersebut dapat berasosiasi dengan daerah bertahanan jenis rendah.
Dengan demikian pada taraf tertentu metoda EM dapat digunakan untuk keperluan
eksplorasi sumber daya alam seperti mineral, minyak dan gas bumi, geotermal serta
untuk keperluan studi permasalahan lingkungan. Oleh karena pentingnya metode
magnetotellurik dalam berbagai bidang, maka perlu pemahaman mengenai processing dan
interpretasi data.
1.2 Tujuan Penulisan
1.2.1 Memenuhi tugas terstruktur mata kuliah Survei Elektromagnetik
1.2.2 Memahami langkah-langkah pengolahan data menggunakan metode magnetotelluric.
1.2.3 Mempelajari langkah-langkah interpretasi data metode magnetotelluric.
1 | P a g e

1.2.4 Mempelajari penerapan metode magnetotelluric dalam contoh studi kasus di lapangan
1.3 Rumusan Masalah
1.3.1 Bagaimana proses dan langkah-langkah pengolahan data pada metode
magnetotelluric?
1.3.2 Bagaimana proses interpretasi data dalam metode magnetotelluric?
1.3.3 Bagaimana penerapan tahap processing dan interpretasi data dalam metode
magnetotelluric?
2 | P a g e

BAB II
PEMBAHASAN
2.1 Pengolahan Data Metode Magnetotelluric
Pada tahap pra-pengolahan data, data mentah yang telah direkam mengalami proses
editing dan demultiplexing untuk menggabungkan data dari setiap kanal yang sama (elektrik
atau magnetik) untuk masing-masing jangkah frekuensi (LF, MF dan HF). Data tersebut
adalah keluaran dari sensor elektrik dan magnetik yang masih berupa harga tegangan listrik
terukur. Proses gain recovery ditujukan untuk mengembalikan faktor perbesaran atau
amplifikasi yang telah digunakan. Disamping itu, pada proses tersebut harga tegangan listrik
terukur dikonversikan kedalam satuan yang biasa digunakan (mV/km untuk medan listrik dan
nano Tesla atau gamma untuk medan magnet).
Seleksi data dalam domain waktu dapat dilakukan secara manual (seleksi visual) maupun
otomatis dengan menetapkan nilai minimal korelasi data yang dapat diterima. Korelasi yang
dimaksud adalah korelasi silang (cross-correlation) antara medan listrik dan medan magnet
yang saling tegak-lurus. Hasilnya dalam bentuk seri waktu (time series) disimpan dalam file
di disket.
Pada tahap analisa spektral, transformasi seri waktu tiap kanal ke dalam domain
frekuensi menghasilkan spektrum daya dan juga spektrum silang (power- dan cross-spectra).
Seleksi data dalam domain frekuensi didasarkan pada koherensinya. Dalam domain
frekuensi, hubungan antara komponen horisontal medan listrik dan medan magnet dinyatakan
oleh persamaan matriks berikut,
E = Z ×H (21)
dimana Z adalah tensor impedansi dengan elemen-elemen bilangan kompleks yang dapat
pula dinyakan sebagai tahanan-jenis semu dan fasa
(22a)
3 | P a g e
(22b)
Disamping itu, antara medan magnet horisontal dan medan magnet vertikal terdapat
hubungan sebagai berikut :
(23)
dimana T adalah vektor induksi yang dapat digunakan untuk menghitung parameter yang
dikenal sebagai tipper. Dari besaran impedansi dan tipper inilah dapat diperkirakan informasi
mengenai distribusi konduktivitas bawah permukaan berdasarkan hasil analisa tensor dan
pemodelan.
2.1.1 Analisa Tensor
Hubungan antara komponen horisontal medan listrik dan medan magnet seperti
dinyatakan oleh persamaan (2) merupakan kasus umum untuk medium 3-D dimana tahanan-
jenis bervariasi terhadap ketiga sumbu x, y dan z. Jika medium homogen atau berlapis
horisontal (1-D) maka Zxx = Zyy = 0 dan Zxy = -Zyx = Z, dimana Z adalah impedansi yang
diperoleh dari komponen horisontal medan listrik dan medan magnet yang saling tegak lurus.
Dengan kata lain, hubungan antara komponen horisontal medan listrik dan medan magnet
tidak lagi dinyatakan oleh suatu tensor melainkan suatu bilangan skalar kompleks. Untuk
medium 2-D dengan sumbu x atau sumbu y searah dengan jurus (strike) maka Zxx = Zyy = 0,
namun Zxy ¹ -Zyx. Secara matematis, kita bisa menghitung tensor impedansi yang seolah-oleh
diperoleh dengan sistem koordinat pengukuran lain melalui rotasi. Hal ini sangat berguna
karena arah jurus struktur tidak diketahui saat pengukuran dilakukan. Tensor impedansi
terotasi Z* dirumuskan sebagai berikut :
dimana R adalah matriks rotasi q searah jarum dan RT adalah transpose dari R.
Dengan asumsi model 2-D, arah jurus struktur dapat diperkirakan dengan merotasikan
tensor hingga diperoleh tensor impedansi dengan elemen anti diagonal (Zxy atau Zyx)
4 | P a g e

maksimal dan elemen diagonal (Zxx dan Zyy) minimal. Salah satu metoda klasik untuk
memperkirakan arah tersebut adalah metoda Swift (Vozoff, 1972) :
dimana tanda ( )* menyatakan tanda konyugasi bilangan kompleks.
Perlu diingat bahwa arah q0 seperti didefinisikan di atas masih mengandung
ambiguitas ±90o sehingga diperlukan data lain seperti tipper ataupun data geologi untuk lebih
memastikan estimasi tersebut. Jika sumbu x dalam sistem koordimat pengukuran searah
dengan jurus maka elemen tensor hasil rotasi Zxy dan Zyx merupakan impedansi yang
berkaitan dengan pengukuran medan listrik sejajar jurus atau TE-mode (Transverse Electric)
dan tegak lurus jurus atau TM-mode (Transverse Magnetic). Cara lain untuk menentukan
arah kecenderungan struktur (trend) adalah dengan menggunakan diagram polar yang
menggambarkan elemen tensor impedansi (biasanya Zxx dan Zxy) sebagai fungsi rotasi q.
Sebagai ilustrasi, perubahan bentuk diagram polar dan kurva sounding tahanan-jenis semu TE
dan TM sebagai fungsi posisinya terhadap kontak vertikal diperlihatkan pada gambar 3.
Berdasarkan asumsi bahwa impedansi medium 1-D merupakan besaran skalar yang tidak
bergantung arah sistem koordinat pengukuran (invariant), maka dari tensor impedansi
diturunkan parameter yang disebut invarian. Dua impedansi invarian yang banyak digunakan
adalah determinan dan rata-rata (Berichevsky, 1976; Ranganayaki, 1984) :
Impedansi invarian sangat berguna untuk memperkirakan struktur secara garis besar jika
medium tidak terlalu jauh menyimpang dari kondisi 1-D. Namun demikian, diperlukan
kecermatan dan kehati-hatian dalam interpretasi yang didasarkan atas hasil pemodelan 1-D
dari impedansi atau tahanan-jenis semu invarian. Prinsip estimasi arah kecenderungan
struktur dengan rotasi dapat pula diterapkan pada tipper sehingga kita peroleh apa yang
disebut sebagai tipper strike. Parameter-parameter lain untuk memperkirakan tingkat
penyimpangan medium dari keadaan ideal 1-D atau 2-D adalah skew dan elliptisitas
impedansi serta tipper skew.
5 | P a g e

2.1.2. Tensor Impedansi
Impedansi merupakan perbandingan antara medan listrik dan medan magnetik. Pada metode
magnetotellurik (MT), salah satu variable yang dicari yaitu tensor impedansi Z(ω). Secara
umum, hubungan linier antara medan listrik, medan magnetik, dan impedansi dapat
dirumuskan dengan persamaan berikut :
E x (ω )=Zxx (ω ) H x (ω )+Z xy ( ω) H y (ω)
E y (ω )=Z yx (ω ) H x (ω)+Z yy (ω) H y (ω)
[ Z ]=[Zxx Zxy
Z yx Z yy]
Dimana [Z] merepresentasikan tensor impedansi.
Hx(ω), Hy(ω), Ex(ω), dan Ey(ω) adalah transformasi Fourier dari perubahan medan
magnetik (H) dan medan listrik (E). Apabila diasumsikan Bumi 1-D maka nilai impedansi
dapat ditunjukkan pada persamaan (Vozoff, 1991) :
Zxy=Ex
H y
=ωμk
= (1+i )(ωμ2 σ )
1 /2
Dimana
Ex = medan listrik pada arah x (Vm )
Hy = medan magnet pada arah y ( Am )
ω = frekuensi angular
μ = permeabilitas magnetik ( Hm )
k = bilangan gelombang
Resistivitas semu, ρa, untuk lapisan Bumi dapat diperoleh dari persamaan berikut
(Cagniard, 1953) :
ρa=1
ωμ| Ex
H y|2
6 | P a g e

Apabila kita asumsikan Bumi seragam maka nilai resistivitas semu harus sama pada
setiap frekuensi dan medan listrik akan berada di atas medan magnetik pada fase 45 derajat
untuk semua frekuensi. Kemudian nilai resistivitas semu dan fase tersebut diplot pada grafik
resistivitas semu vs frekuensi dan fase vs frekuensi.
Dua modus independen dari impedansi dianalisis untuk analisis pendekatan Bumi 2-D
dalam sistem koordinat Kartesian dengan y searah dengan arah strike dan x tegak lurus
terhadap arah strike. Modus Transverse Electric (TE) adalah modus yang medan listriknya
searah dengan strike, sedangkan modus Transverse Magnetik (TM) adalah modus yang
medan magnetiknya searah dengan strike. Bagian diagonal dari impedansi tensor untuk
pendekatan Bumi 2-D adalah nol.
[ Z ]=[ 0 Z xy
Z yx 0 ]Dimana
Z yx=ZTE=E y
H x
Zxy=ZTM=Ex
H y
Asumsikan data yang diperoleh dengan menggunakan sistem koordinat (x‟,y‟) dan
sistem koordinat struktural (x,y) dimana y searah dengan strike, data MT dirotasi dari (x‟,y‟)
ke (x,y). Jika sudut rotasi dari (x‟,y‟) ke (x,y) adalah maka kita dapat menerapkan matriks
rotasi :
R=( cosθ sin θ−sin θ cosθ)
Sehingga
E=R E ' dan H=RH '
Sudut rotasi (ϴ) di atas dapat ditentukan dengan melakukan rotasi tensor impedansi
secara meningkat atau dapat dihitung secara analitik berdasarkan persamaan berikut :
θ=14
tan−1( 2 R1 R2+ I 1 I 2
R12+ I 1
2−R22−I 2
2 )Dimana
7 | P a g e
{R1=Re (Zxx−Z yy)I 1=I m(Z xx−Z yy)R2=Re (Zxy−Z yx)I 2=I m(Z xy−Z yx)
Tensor impedansi, Z merupakan bilangan kompleks yang terdiri dari bagian riil dan
imajiner. Oleh karena itu, masing – masing komponen, Zij dan Z tidak hanya memiliki besar,
tetapi juga memiliki fase (Simpson & Bahr, 2005), sebagaimana ditunjukkan pada persamaan
berikut :
ρa , ij (ω )= 1π 0ω
|Z ij(ω)|2
Φ ij=tan−1( ℑ{Z ij}ℜ{Z ij})
2.1.3. MT Remote Reference
Data yang diperoleh dari pengukuran MT pada umumnya memiliki noise lokal yang
dapat mengganggu pemodelan maupun interpretasi. Untuk meningkatkan kualitas sinyal yang
diinginkan, kita harus memastikan bahwa kombinasi sinyal antara medan listrik dan medan
magnetik yang kita dapat adalah kombinasi yang koheren. Pada saat pengukuran MT
dilakukan, kita akan memperoleh nilai medan listrik dan medan magnetik di mana ketika
sinyal tersebut terekam maka masih terdapat di dalamnya sinyal noise yang tidak kita
inginkan. Oleh karena itu, noise pada data MT ini harus dihilangkan dengan menggunakan
metode remote reference (Unsworth, 2008).
Metode remote reference adalah proses penambahan sensor pada suatu titik/stasiun
tertentu (remote) yang dapat meredam noise pada titik/stasiun pengukuran lokal. Sensor
disini biasanya merekam medan magnetik saja karena medan magnetik memiliki nilai
regional. Sehingga dapat menjadi acuan untuk nilai medan magnetik lokal.
8 | P a g e
Pada pengukuran MT remote reference, data MT selalu direkam secara bersamaan di
dua tempat berbeda dengan pengaturan waktu dilakukan dengan menggunakan GPS. Jika
sinyal yang terekam pada kedua stasiun itu sama maka kemungkinan sinyalnya itu
merupakan sinyal yang sebenarnya. Pengukuran MT remote reference harus dilakukan pada
daerah yang jauh dari noise. Hal ini bertujuan untuk meningkatkan kualitas data MT. Untuk
menghilangkan pergerakan tanah (Ground Motion), jarak stasiun MT remote reference 500 m
sudah cukup, sedangkan untuk menghilangkan sinyal dari rangkaian arus listrik DC, 500 km
mungkin diperlukan (Unsworth, 2008).
Pengolahan data MT dilakukan mulai dari data mentah berupa time series sampai
diperoleh nilai reisitivitas semu dan fase. Beberapa parameter fisis pada MT seperti
impedansi, resistivitas semu, dan fase merupakan fungsi frekuensi. Oleh karena itu, domain
data time series harus dikonversi terlebih dahulu dari domain waktu menjadi domain
frekuensi dengan menggunakan transformasi Fourier. Setelah data MT dikonversi menjadi
domain frekuensi, kemudian kita melakukan teknik robust untuk mereduksi noise dan
membuat data menjadi smooth. Dan yang terakhir, kita menghitung nilai impedansi,
resistivits semu, dan fase.
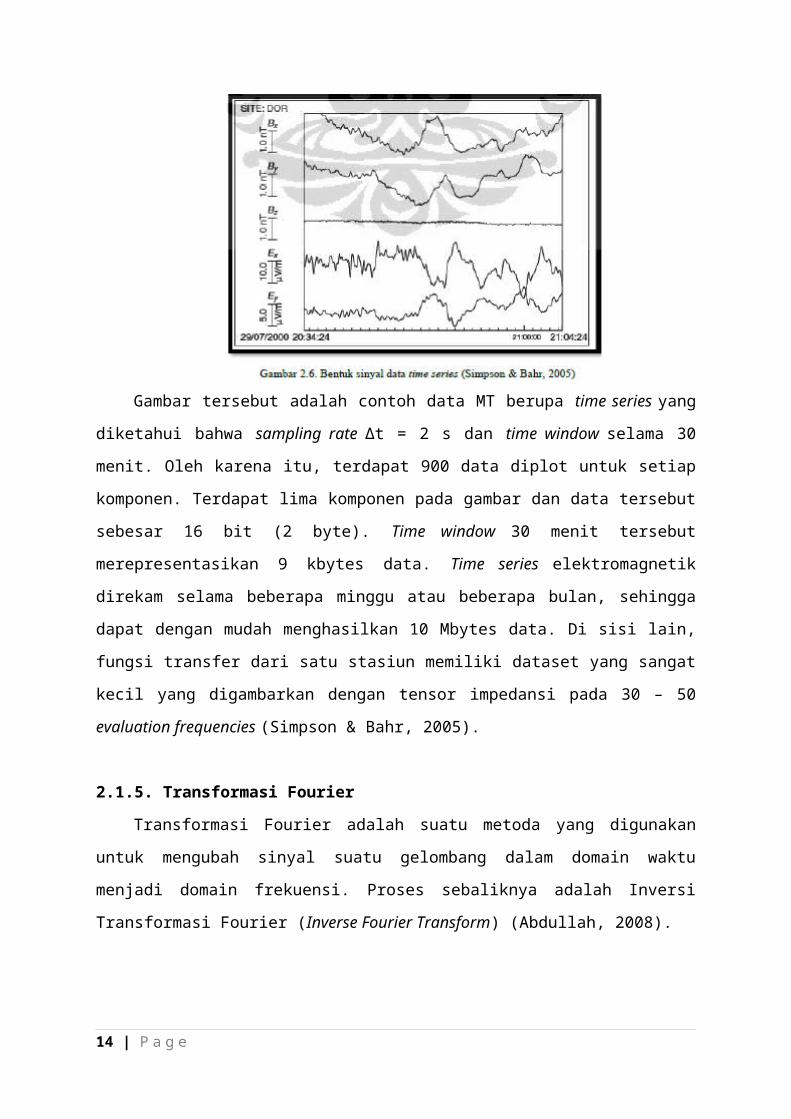
2.1.4. Data Time Series
Time series digital yang dikumpulkan selama survey MT totalnya mencapai beberapa
Gigabytes. Akan tetapi, data yang akan diinterpretasikan dengan menggunakan skematik
model numerik terdiri dari beberapa ratus data per stasiun. Hal ini merepresentasikan bahwa
frekuensi yang bergantung pada fungsi transfer. Salah satu time series secara bersama
memberikan informasi mengenai periode dan penetrasi kedalaman. Langkah awal dalam
9 | P a g e
pengolahan data adalah mentransformasikan data dari domain waktu menjadi domain
frekuensi. Reduksi data kemudian didapat dengan stacking data sampai spectra tertentu
dalam frekuensi domain. Kedua frekuensi dari segmen yang sama pada time series dan
frekuensi serupa dari sequential time series dapat di-stack.
Gambar tersebut adalah contoh data MT berupa time series yang diketahui bahwa
sampling rate Δt = 2 s dan time window selama 30 menit. Oleh karena itu, terdapat 900 data
diplot untuk setiap komponen. Terdapat lima komponen pada gambar dan data tersebut
sebesar 16 bit (2 byte). Time window 30 menit tersebut merepresentasikan 9 kbytes data.
Time series elektromagnetik direkam selama beberapa minggu atau beberapa bulan, sehingga
dapat dengan mudah menghasilkan 10 Mbytes data. Di sisi lain, fungsi transfer dari satu
stasiun memiliki dataset yang sangat kecil yang digambarkan dengan tensor impedansi pada
30 – 50 evaluation frequencies (Simpson & Bahr, 2005).
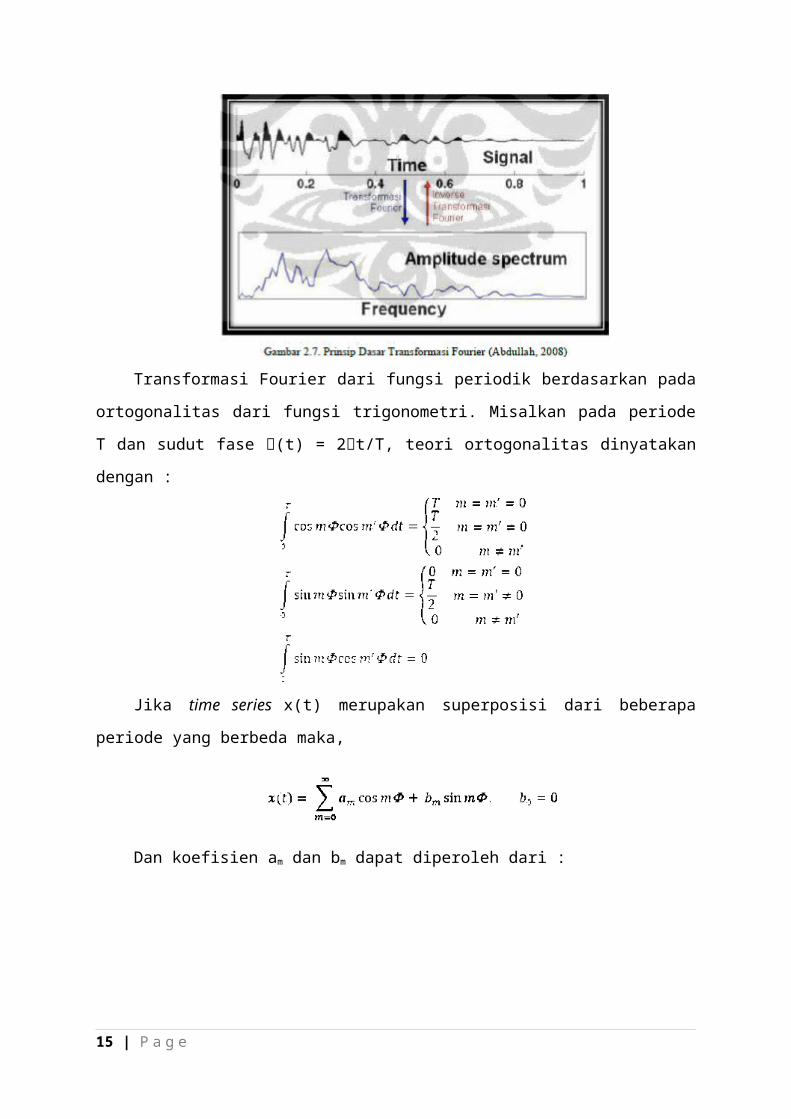
2.1.5. Transformasi Fourier
Transformasi Fourier adalah suatu metoda yang digunakan untuk mengubah sinyal
suatu gelombang dalam domain waktu menjadi domain frekuensi. Proses sebaliknya adalah
Inversi Transformasi Fourier (Inverse Fourier Transform) (Abdullah, 2008).
10 | P a g e

Transformasi Fourier dari fungsi periodik berdasarkan pada ortogonalitas dari fungsi
trigonometri. Misalkan pada periode T dan sudut fase (t) = 2t/T, teori ortogonalitas
dinyatakan dengan :
Jika time series x(t) merupakan superposisi dari beberapa periode yang berbeda maka,
Dan koefisien am dan bm dapat diperoleh dari :
11 | P a g e

Pada umumnya proses yang terjadi secara alami tidak bersifat periodik. Akan tetapi,
apabila proses tersebut adalah transisi stasioner T → ∞maka akan menjadi mungkin.
Sekuensial diskret dibentuk oleh koefisien Fourier cm , ketika x(t) diganti menjadi X(ω) oleh
transformasi Fourier. Dengan frekuensi sudut ω=2πm/T dan mφ=ωt maka kita akan
mendapatkan persamaan sebagai berikut :
Persamaan ini merupakan superposisi dari osilasi beberapa periode yang berbeda. Oleh
karena proses digitisasi, konten informasi, dan jumlah koefisien yang terbatas :
Dimana φj=2πm/N
Koefisien Fourier diperoleh dengan transformasi Fourier diskret :
Secara jelas, T=N∆t merupakan periode terpanjang dan memiliki koefisien a1 dan b1 .
Periode Nyquist TNY=2∆t merupakan periode terpendek.
Jika semua osilasi dengan periode lebih pendek dari 2∆t telah dihilangkan dari data
awal untuk digitisasi maka :
12 | P a g e

Oleh karena transformasi hanya bisa diterapkan jika x(t)=0 pada margin, kita perlu
untuk menyiapkan time series awal untuk diaplikasikan dari persamaan dalam dua tahap
(Simpson & Bahr, 2005) :
Menghilangkan linear trend :
xi → xi - ia∆t
dimana
Mengalikan x dengan cosine bell :
xi → wixi
dimana
Atau
Discrete Fourier Transform (DFT)
Transformasi Fourier Diskrit adalah transformasi Fourier yang dihitung secara
langsung.
Fast Fourier Transform (FFT)
Fast Fourier Transform (FFT) adalah teknik komputasi yang digunakan untuk
menangani transformasi Fourier dari data diskrit dengan jumlah yang banyak secara efisien.
Efisiensinya terutama berawal dari kemampuannya untuk memanfaatkan sifat – sifat periodik
yang terdapat dalam fungsi – fungsi sinus maupun cosines. Pada persamaan berikut, Gk
merupakan suku genap dan Hk adalah suku ganjil (Heditama, 2011).
13 | P a g e
2.2 Interpretasi Data Metode Magnetotelluric
Interpretasi kualitatif didasarkan pada penampang tahanan-jenis semu (pseudosection),
peta tahanan-jenis semu pada beberapa periode, peta total conductance serta peta-peta yang
menampakkan hasil analisa tensor seperti diagram polar, vektor induksi dan sebagainya.
Interpretasi kuantitatif didasarkan atas hasil pemodelan 1-D dan 2-D.
Pemodelan dimaksudkan untuk mengekstraksi informasi yang terkandung dalam data
untuk memperkirakan distribusi tahanan-jenis bawah permukaan melalui model-model.
Model yang paling sederhana adalah model 1-D dimana tahanan-jenis bervariasi hanya
terhadap kedalaman r(z). Model 1-D biasanya direpresentasikan oleh model berlapis
horisontal, yaitu model yang terdiri dari beberapa lapisan dimana tahanan-jenis tiap lapisan
homogen. Dalam hal ini parameter model adalah tahanan-jenis dan ketebalan tiap lapisan.
Pemodelan menggunakan model 1-D hanya dapat diterapkan pada data yang memenuhi
kriteria data 1-D. Namun demikian, dengan asumsi tertentu pemodelan 1-D dapat pula
diterapkan pada data yang dianggap mewakili kecenderungan lokal atau struktur secara garis
besar, misalnya impedansi invarian dan impedansi dari TE-mode. Pemodelan 1-D
menggunakan kurva sounding TE-mode didasarkan atas anggapan bahwa pengukuran medan
listrik searah jurus tidak terlalu dipengaruhi oleh diskontinuitas lateral tegak lurus jurus.
Teknik forward modelling dilakukan dengan menghitung respons dari suatu model untuk
dibandingkan dengan data impedansi (tahanan-jenis semu dan fasa) pengamatan. Dengan
cara coba-coba (trial and error) dapat diperoleh suatu model yang responsnya paling cocok
dengan data, sehingga model tersebut dapat dianggap mewakili kondisi bawah permukaan.
Teknik inverse modelling memungkinkan kita memperoleh parameter model langsung dari
data. (Ranganyaki, 1984)
Metoda inversi Bostick merupakan cara yang cepat dan mudah untuk memperkirakan
variasi tahanan-jenis terhadap kedalaman secara langsung dari kurva sounding tahanan-jenis
semu. Metode ini diturunkan dari hubungan analitik antara tahanan jenis, frekuensi dan
kedalaman investigasi atau skin depth. Namun perlu diingat bahwa metoda ini bersifat
14 | P a g e
aproksimatif sehingga hanya dapat dilakukan sebagai usaha pemodelan dan interpretasi pada
tahap pendahuluan.
Dalam metoda inversi kuadrat terkecil (least-square), model awal dimodifikasi secara
iteratif hingga diperoleh model yang responsnya cocok dengan data. Adanya aproksimasi
atau linearisasi fungsi non-linier antara data dan parameter model menyebabkan metode
tersebut sangat sensitif terhadap pemilihan model awal. Oleh karena itu model awal biasanya
ditentukan dari hasil pemodelan tak-langsung atau hasil inversi Bostick.
Kecenderungan terakhir menunjukkan bahwa metode inversi tidak hanya ditujukan untuk
menentukan satu model saja melainkan sejumlah besar model yang memenuhi kriteria data
(misalnya, metode Monte-Carlo). Estimasi statistik dari model-model yang diperoleh
digunakan untuk menentukan solusi metoda inversi. Kecenderungan baru tersebut terutama
ditunjang dengan tersedianya komputer pribadi (PC) dan workstations yang dilengkapi
dengan processor berkecepatan tinggi. (Jones, 1983)
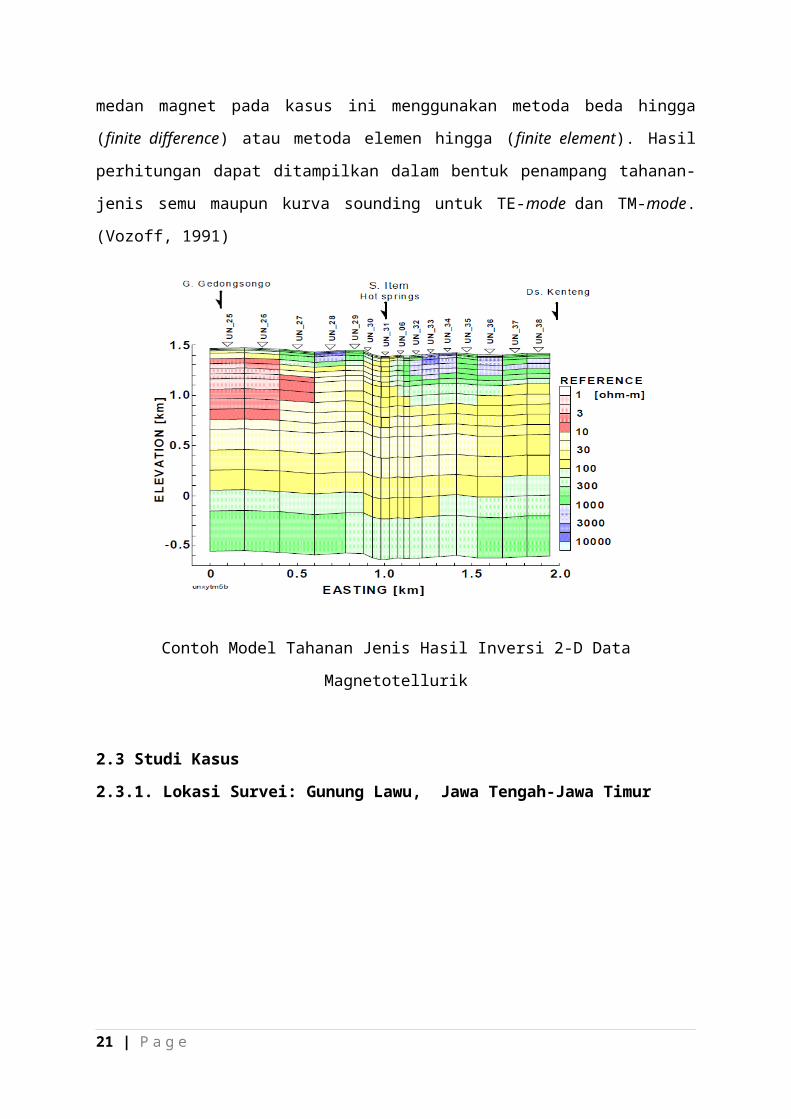
Profil tahanan-jenis 1-D beberapa titik amat dalam satu lintasan dapat digunakan sebagai
model awal untuk pemodelan 2-D. Penyelesaian persamaan yang berlaku untuk medan listrik
dan medan magnet pada kasus ini menggunakan metoda beda hingga (finite difference) atau
metoda elemen hingga (finite element). Hasil perhitungan dapat ditampilkan dalam bentuk
penampang tahanan-jenis semu maupun kurva sounding untuk TE-mode dan TM-mode.
(Vozoff, 1991)
Contoh Model Tahanan Jenis Hasil Inversi 2-D Data Magnetotellurik
15 | P a g e

2.3 Studi Kasus
2.3.1. Lokasi Survei: Gunung Lawu, Jawa Tengah-Jawa Timur
Peta indeks lokasi survei
2.3.2. Akuisisi Data
Pengukuran MT telah dilakukan di daerah ini pada tahun 2010. Titik ukur MT tersebar
secara acak dengan interval antara 700 meter hingga 2000 meter dan didesain sedemikian
rupa agar dapat melingkupi seluruh daerah prospek panas bumi (Gambar 3). Pengukuran MT
dilakukan dari sore hingga pagi hari dengan selang waktu pengukuran antara 12 jam hingga
15 jam.
16 | P a g e

2.3.3. Interpretasi Data
2.3.3.1. Peta Tahanan Jenis
Hasil pengukuran MT ditampilkan dalam bentuk peta tahanan jenis. Peta ini dibuat
berdasarkan hasil pemodelan MT 2D yang disayat tiap kedalaman lapisan serta ditampilkan
dan dibahas peta pada kedalaman 500 meter, 1000 meter, 1500 meter, dan 2000 meter. Pada
peta tersebut (Gambar 4 dan Gambar 5) terlihat adanya sebaran tahanan jenis rendah yang
membuka ke arah puncak Gunung Lawu. Nilai tahanan jenis rendah ini terlihat pada
kedalaman 500 m dan 1000 m. Nilai ini diinterpretasikan sebagai respon dari batuan ubahan
yang berfungsi sebagai batuan penudung(cap rock) pada sistem panas bumi di daerah ini.
Pada kedalaman 1500 m dan 2000 m sebaran tahanan jenis rendah ini tidak terlihat lagi dan
hanya terlihat nilai tahanan jenis sedang yang diinterpretasikan sebagai zona dari reservoir
panas bumi.
17 | P a g e

2.3.3.2. Model Tahanan Jenis 2-D
Pemodelan tahanan jenis 2D dari data MT ini dilakukan dengan menggunakan
algoritma Non-Linear Conjugate Gradient (NLCG) yang telah dibahas oleh Rodi dan Mackie
(2001) dan Ushijima, dkk (2005). Pengerjaan pemodelan ini menggunakan software
WinGlink ver 2.20.01 – 20071022. Disini akan dibahas hasil pemodelan pada satu
penampang yang memanjang dari barat laut ke tenggara dan memotong mata air panas
Jenawi, fumarol Candradimuka, dan fumarol Tamansari Bawah. Pada hasil pemodelan
tersebut (Gambar 6) terlihat adanya sebaran tahanan jenis rendah (< 20 Ohm-m) di sekitar
lokasi munculnya fumarol. Tahanan jenis rendah ini diperkirakan berasosiasi dengan batuan
ubahan berupa lempung yang berfungsi sebagai batuan penudung di daerah ini. Tahanan jenis
rendah ini cenderung menipis ke arah barat laut dan menebal ke arah tenggara. Nilai tahanan
jenis rendah yang cenderung menipis ke arah barat laut ini diinterpretasikan sebagai respon
dari bagian batuan ubahan yang diakibatkan oleh adanya interaksi fluida panas dengan batuan
disekitarnya yang semakin melemah, sedangkan tahanan jenis rendah yang tebal di sebelah
tenggara diinterpretasikan sebagai respon dari aquifer air tanah yang berfungsi sebagai
sumber air Telaga Sarangan. Di sebelah barat laut bagian bawah juga terlihat adanya sebaran
tahanan jenis tinggi yang diinterpretasikan sebagai respon dari batuan intrusi yang tidak
muncul ke permukaan. Pada penampang ini juga diinterpretasikan terdapat enam buah
18 | P a g e

struktur yang berupa sesar normal. Struktur yang terdapat di sekitar MTGL-03 dan MTGL-27
diinterpretasikan sebagai dua buah struktur yang membatasi sistem panas bumi di daerah ini,
sedangkan dua struktur yang berada diantaranya diperkirakan merupakan struktur-struktur
yang mengontrol sistem panas bumi di daerah Gunung Lawu ini.
Berdasarkan data MT ini, sistem panas bumi yang berkembang di daerah ini
diperkirakan menyerupai sistem panas bumi di lingkungan vulkanik pada umumnya, dimana
batuan penudungnya berupa batuan alterasi yang biasanya memberikan respon nilai tahanan
jenis rendah, sedangkan reservoir panas buminya berada di bawah batuan penudung dan
memberikan respon nilai tahanan jenis relatif lebih tinggi daripada batuan penudung
(Johnston, J.M., et.al.,1992). Dari survei MT, sebaran tahanan jenis rendah yang
diinterpretasikan sebagai batuan penudung tersebar disekitar fumarol dan menerus ke arah
barat puncak Gunung Lawu dengan pola sebaran yang cenderung membuka ke arah puncak.
Sebaran tahanan jenis rendah ini tersebar dari permukaan tanah hingga kedalaman 1500
meter dengan ketebalan sekitar 1000 – 1500 meter (Gambar 5). Reservoir panas bumi
diperkirakan berada di bawah batuan penudung dan dicirikan dengan respon tahanan jenis
yang lebih tinggi dari batuan penudung. Puncak reservoir ini diperkirakan beradadi bawah
fumarol Candradimuka dimana puncaknya berada pada ketinggian 1000 meter di atas
permukaan laut. Puncak reservoir ini semakin mendalam ke arah barat mengikuti lereng
topografi Gunung Lawu (Gambar 6). Berdasarkan hasil survei MT ini, daerah prospek panas
bumi Gunung Lawu terletak di sebelah barat daya puncak Gunung Lawu dimana daerah
prospek ini dibatasi oleh struktur geologi di sebelah utara dan kontras tahanan jenis di sebelah
selatan, barat, dan timurnya dengan luas sekitar 17 km2.
19 | P a g e

20 | P a g e
BAB III
PENUTUP
3.1 Kesimpulan
3.2 Saran
Sebaiknya, dalam pemetaan geologi tidak hanya digunakan peta topografi, tapi juga
digunakan peta administrasi daerah, peta jenis tanah, dan peta lainnya, daftar litologi dari
berbagai literatur yang ada sehingga dapat diketahui secara pasti kondisi geologi daerah
tersebut.
DAFTAR PUSTAKA
21 | P a g e


















