
Study on Automatic Collision Avoidance System...
38
Study on Automatic Collision Avoidance System and Method for Evaluating Collision Avoidance Manoeuvring Results Shinya Nakamura : Japan Marine Science Inc . Naoki Okada : Japan Marine Science Inc. Satoru Kuwahara : Japan Marine Science Inc. Koji Kutsuna : MTI Co., Ltd. Takuya Nakashima : Mitsubishi Research Institute, Inc. Hideyuki Ando : MTI Co., Ltd. MTEC / ICMASS 2019
Transcript of Study on Automatic Collision Avoidance System...

Study onAutomatic Collision Avoidance System
and Method for Evaluating Collision Avoidance Manoeuvring Results
Shinya Nakamura : Japan Marine Science Inc.Naoki Okada : Japan Marine Science Inc.Satoru Kuwahara : Japan Marine Science Inc.Koji Kutsuna : MTI Co., Ltd.Takuya Nakashima : Mitsubishi Research Institute, Inc.Hideyuki Ando : MTI Co., Ltd.
MTEC / ICMASS 2019

INTRODUCTION
• Development of an automatic collision avoidance system for unmanned Autonomous ships(Remote maneuvering)
• Development of evaluation method of automatic collision avoidance maneuvering results
Goals of Study
2

CONCEPT OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING
•Ship manoeuvring which minimizes the economic loss, constantly selects a low-risk course from an early stage and reduces the encounter situation where the manoeuvring load is high
Strategic Collision Avoidance Manoeuvring
3

CONCEPT OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING
• There are many ambiguous expressions in the current COLREGs (ex Action by stand-on vessel, she shall take such action as will best aid to avoid collision)
• Therefore, the desirable automatic system takes action to reduce the risk before the “Conduct of Vessels In Sight of Another" defined by the COLREGs is applied.
• It should be avoided that the rules of “Action by stand-on vessel” apply
Strategic Collision Avoidance Manoeuvring
4
Conduct of vessels in sight of one another
Rule 17 Action by stand-on vessel
………… The vessel required to keep her course and speed finds herself so close that collision cannot be avoided by the action of the give-way vessel alone, she shall take such action as will best aid to avoid collision

CONCEPT OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING
• Developed an automatic collision avoidance system considering the realization of strategic collision avoidance manoeuvring
A method of altering her course or changing her speed to reduce the risk before rules defined by CORLEGs is applied
Strategic Collision Avoidance Manoeuvring
5

Collision Risk
Highest Ev(Xij)Altering course 24deg. at the Present Speed
𝐸𝐸𝐸𝐸 𝑋𝑋𝑖𝑖,𝑗𝑗 = 𝑃𝑃𝑃𝑃 𝑋𝑋𝑖𝑖,𝑗𝑗 − 𝛼𝛼 � max 𝑅𝑅 𝑋𝑋𝑖𝑖,𝑗𝑗
Clossing situationTarget ShipLoa 175m, 12kts
Own ShipLoa 175m, 12kts
Altering Co. Port 60deg. to Stb’d 60 deg. (i)
Preference of Manoeuvre(Minimizes the economic loss)
Risk
Lev
el
Pref
eren
ce L
evel
CONCEPT OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRINGPr
efer
ence
Lev
el
6

How to calculate the collision risk by using exclusive area
𝑅𝑅 𝑋𝑋𝑖𝑖,𝑗𝑗 = 𝑀𝑀𝑀𝑀𝑀𝑀 𝑅𝑅𝑥𝑥 ,𝑅𝑅𝑦𝑦 � 1 −𝑇𝑇𝑇𝑇𝑇𝑇𝑀𝑀𝑊𝑊𝑊𝑊𝑇𝑇𝑇𝑇𝑀𝑀
a
c
bd
Distance
Direction ofRelative Movement
Vt
Own ShipVo
Vt
VR
Relative y -axis
Relative x -axis
Absolute Y-axis
Ry k
Rx k
1.0
1.0Target Ship
Function indicating collision risk
Yt
Xo
Yo
Xt Absolute X -axis
Function indicating collision risk
Ry
Rx
Own Ship
Target Ship
CONCEPT OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING
Collision Risk:Select larger one of Rx and Ry
7

×20×2
CONCEPT OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING
8

EVALUATION METHOD OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING RESULTS
Towards level certification of automatic collision avoidance system
9
•The desirable automatic collision avoidance system should reduce the risk before rules defined by CORLEGs is applied
Therefore ………..

EVALUATION METHOD OF AUTOMATIC COLLISION AVOIDANCE MANOEUVRING RESULTS
Towards level certification of automatic collision avoidance system
Evaluation by“Relative distance" and “Bearing change rate“
Three areas are defined according to the encounter situation with other ships
It was formulated in an experiment in which 12 captains and pilots participatedTotal Number of data reached approx. 30,000 points
10
Unacceptable areaThe area where own ship commence to avoid or expect another ship to avoidAcceptable area
“Danger area”“Caution area”“Safety area”
Safety area → It means collision avoidance manoeuvring that dose not give anxiety to the target ship

Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
2.3 miles 2.3 miles
View fromOwn Ship
View fromTarget Ship
Time
0:00
Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
11
Not give anxiety Give anxiety

2.1 miles 2.1 miles
Time
0:30
Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
View fromOwn Ship
View fromTarget Ship
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
12
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
1.9 miles 1.9 miles
Time
1:00
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
13
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
1.8 miles 1.8 miles
Time
1:30
View fromOwn Ship
View fromTarget Ship
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
14
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
1.6 miles 1.6 miles
Time
2:00
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
15
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
1.5 miles 1.3 miles
Time
2:30
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
16
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
1.2 miles 1.1 miles
Time
3:00
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
17
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
1.1 miles 1.0 miles
Time
3:30
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
18
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
0.9 miles 0.8 miles
Time
4:00
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
19
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
0.8 miles 0.6 miles
Time
4:30
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
20
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
0.6 miles 0.5 miles
Time
5:00
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
21
Not give anxiety Give anxiety

Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
0.4 miles0.5 miles
It is a situation still shows own ship starboard side to the other target ship at the distance is 0.4mile. It can be said that it isa situation giving anxiety
Time
5:30
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
Bow Crossing 0.4 miles
22
Not give anxiety

0.3 miles
Time
6:00
Automatic collision avoidance manoeuvringthat dose not give anxiety to the target ship
View fromOwn Ship
View fromTarget Ship
Bow
Cro
ssin
g
Di s t. [Miles]
[Head-on / Crossing Situation]
Danger Caution
Safety Safety
CautionDanger
[Head-on / Crossing Situation]
Dist. [Miles]
Bow
Cro
ssin
g
though collision can be avoided …….
Manoeuvringthat Dose Not Give Anxiety to the Target Ship
Manoeuvringthat Dose Give Anxiety to the Target Ship
Deduction Point:0 Deduction Point:-75.3
23
Not give anxiety Give anxiety
Weighting coefficient ➡ Danger:-2, Caution:-1 Calculated based on the ratio of time in the area
Deduction Point 0 → It means desirable collision avoidance manoeuvring that dose not give anxiety to the target ship.
This evaluation area chart is effective for safety evaluation of automatic collision avoidance systems.

Comparison of Manoeuvring Results by Automatic Collision Avoidance System and Manoeuvring Result by Human
Verification experiments using a full mission simulator Comparison of the maneuvering results of "Automatic Collision avoidance system""Veteran captain“ and "Inexperienced Officer"
24

Experimental Scenario in Actual Congested Sea Area
0 20NM
Head-on Vessels,Same way Vessels
<056>
<020>
<003>
Own ShipPlaned Route
For Osaka, Kobe
Comparison of Manoeuvring Results by Automatic Collision Avoidance System and Manoeuvring Result by Human
25

Comparison of Manoeuvring Results by Automatic Collision Avoidance System and Manoeuvring Result by Human
26

計画針路Planed Route
Veteran CaptainPerforming a large course change to clearly show the intention
Inexperienced OfficerJudgment of avoidance is slightly delayed and enters caution area, and deviation from planned course is large
Automatic SystemWhile ensuring a sufficient heading change that does not give anxiety to other ships, it seeks an optimal solution, so there is a slight deviation from the planned course compared to a veteran captain
Comparison of Manoeuvring Results by Automatic Collision Avoidance System and Manoeuvring Result by Human
Comparison by own ship’s track chart
27
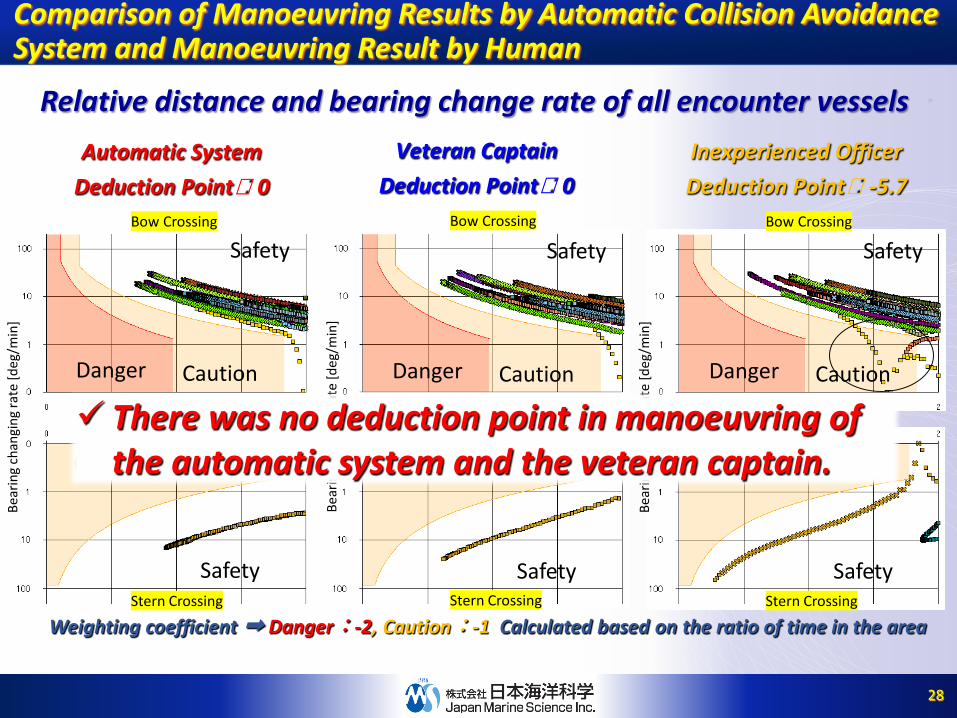
Relative distance and bearing change rate of all encounter vesselsAutomatic System
Deduction Point: 0Veteran Captain
Deduction Point: 0Inexperienced OfficerDeduction Point: -5.7
Weighting coefficient ➡ Danger:-2, Caution:-1 Calculated based on the ratio of time in the area
Danger Danger Danger
Caution Caution Caution
Safety Safety Safety
Safety Safety Safety
Caution Caution Caution
Dist [Miles] Dist [Miles] Dist [Miles]
Bow Crossing Bow Crossing Bow Crossing
Stern Crossing Stern Crossing Stern Crossing
Bear
ing
chan
ging
rate
[deg
/min
]
Bear
ing
chan
ging
rate
[deg
/min
]
Bear
ing
chan
ging
rate
[deg
/min
]
Comparison of Manoeuvring Results by Automatic Collision Avoidance System and Manoeuvring Result by Human
There was no deduction point in manoeuvring of the automatic system and the veteran captain.
28

Relative distance and bearing change rate of all encounter vessels
Weighting coefficient ➡ Danger:-2, Caution:-1 Calculated based on the ratio of time in the area
Comparison of Manoeuvring Results by Automatic Collision Avoidance System and Manoeuvring Result by Human
【Crossing from Port 】 【Crossing from Port 】
【Head-on / Crossing from Starboard 】 【Head-on / Crossing from Starboard 】
Baw
Cro
ssin
g
Baw
Cro
ssin
g
Baw
Cro
ssin
g
Baw
Cro
ssin
g
Ster
n Cr
ossin
g
Ster
n Cr
ossin
g
Ster
n Cr
ossin
g
Ster
n Cr
ossin
g
Danger Danger
Caution Caution
Caution Caution
The system dose not calculate only immediate danger. Therefore the automatic system is better at preventing “lack of situational awareness”
29
Automatic SystemDeduction Point: -1.4
Veteran CaptainDeduction Point: -15.4

Cement carrierGT: Deadweight tons:LOA:Lpp:Draft:Speed:
“Kouzan Maru”14,902t22,053t160.9m153.7m8.9m13.0kt
Verification Experiment on Actual Ship
TOKYOLT: 2019.Jan.18 JST1530h
UBEAT:2019.Jan.20 JST1100h
Number of AIS Ships:5,911Ships
30

Off the Coast of Yokohama Immediately after leaving Tokyo
Preference Course : Stb’d 10 deg.Preference order
Risk
Own ShipCrossing Ships
Same-way Ship
Preference CourseCaution
Caut
ion
Bow
Cro
ssin
gSt
ern
Cro
ssin
gBe
arin
g Ch
angi
ng ra
te [d
eg./m
in.]
[Head-on / Crossing Situation] [Same-way Si tuation]
Dist. [Miles] Dist. [Miles]
Danger Caution
Alter Course → Stb’d 10deg.
Relative Track ChartTrack Chart
Own Ship Own Ship
Crossing Ships
Crossing Ships
Same-way ShipSame-way Ship
Yokohama
Alter Course to Stb’d 10 deg.
2 1 0 1 Dist. [Miles] 8 6 4 2 0 Dist. [Miles]
2
1
0
1
D
ist.
[Mile
s]
6
4
2
0
D
ist.
[Mile
s]
Verification Experiment on Actual Ship
Crossing ships from Stb’d side are encountered with the Manouevring area being restricted by same-way ships
Yokohama
Risk
Preference Order
31

Congested Water around Japan Coast
Own Ship
Own Ship
Head-on Ships
Head-on Ships
2 1 0 1 Dist. [Miles]
2
1
0
1
D
ist.
[Mile
s]
8 6 4 2 0 Dist. [Miles]
Alter Course to Stb’d 8 deg.
Track Chart Relative Track Chart
8
6
4
2
0
D
ist.
[Mile
s]
DangerCaution
Caution
Caut
ion
[Head-on / Crossing Situation] [Same-way Situation]
Bow
Cro
ssin
gSt
ern
Cro
ssin
gBe
arin
g Ch
angi
ng ra
te [d
eg./m
in.]
Dist. [Miles] Dist. [Miles]
Alter Course → Stb’d 8 deg.
Own ShipRisk
Preference orderPreference Course : Stb’d 8 deg.
Head-on Ships
Preference Course
Verification Experiment on Actual Ship
In the Situation of Encounter with Head-on Ships
32

Conducted the world’s first Maritime Autonomous Surface Ships (MASS) trial performed in accordance with the IMO’s Interim Guidelines for MASS
“IRIS LEADER”, a large NYK-operated PCTC having a gross tonnage of 70,826 tons, was navigated day and night using the Automatic Collision Avoidance System during the period from 14 to 19 September 2019 from Xinsha, China, to the port of Yokohama, Japan. (https://www.nyk.com/english/news/2019/20190930_01.html)
Verification Experiment on Actual Ship
33
Target Data: AIS + Radar TT

Conclusion
In order to carry out strategic collision avoidance manoeuvring, an automatic collision avoidance system constantly calculating optimal manoeuvring method was introduced.
A system that evaluates the situation that entered "Danger area" and "Caution area" using the relative distance and bearing change rate with a deduction-based evaluation system was proposed.
Validity verification of the developed automatic collision avoidance system was carried out compared to the manoeuvring results of veteran captain and officers.It was verified that the collision avoidance manoeuvring by the automatic collision avoidance system is almost equal to that by veteran captain.
Verification experiments were successfully conducted to verify the effectiveness of the proposed automatic collision avoidance system on the actual ship navigating in congested waters..
34

35
Case 01 Case 02 Case 03 Case 04
Case 05 Case 06 Case 07 Case 08
~~14NM
Loa: 175m16.1 kts < 180>DCPA : 0.0NMT CPA : 26.1min
Loa: 200m16.1 kts < 000>
~~14NM
Loa: 175m16.1 kts < 180>DCPA : 0.2NMT CPA : 26.1min
Loa: 200m16.1 kts < 000>
300m
~~14NM
Loa: 175m16.1 kts < 180>DCPA : 0.2NMT CPA : 26.1min
Loa: 200m16.1 kts < 000>
300m
6NM
Loa: 175m5.0 kts < 000>
DCPA : 0.0NMT CPA : 29.8min
Loa: 200m16.1 kts < 000>
Head-on Head-on Head-on Overtake
3NM
Loa: 175m16.1 kts < 270>DCPA : 0.0NMT CPA : 11.2min
Loa: 200m16.1 kts < 000>
3NM
3NM
Loa: 175m16.1 kts < 090>DCPA : 0.0NMT CPA : 11.2min
Loa: 200m16.1 kts < 000>
3NM
~~10NM
Loa: 175m16.1 kts < 270>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM~~
10NM
Loa: 175m16.1 kts < 090>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM
~~
~~
Cross Cross Cross Cross
2
Case 09 Case 10 Case 11 Case 12
Case 13 Case 14 Case 15 Case 16
3NM
Loa: 175m16.1 kts < 210>DCPA : 0.0NMT CPA : 11.2min
Loa: 200m16.1 kts < 000>
3NM30°
3NM
Loa: 175m16.1 kts < 150>DCPA : 0.0NMT CPA : 11.2min
Loa: 200m16.1 kts < 000>
3NM 30°
~~10NM
Loa: 175m16.1 kts < 150>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM 30°
10NM
Loa: 175m16.1 kts < 210>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM30°
~~
Cross Cross Cross Cross
~~10NM
Loa: 175m16.1 kts < 320>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM
40°10NM
Loa: 175m16.1 kts < 040>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM40°
~~
Cross Cross Cross Cross
3
~~10NM
Loa: 364m16.1 kts < 150>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM 30°
10NM
Loa: 364m16.1 kts < 210>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM30°
~~
Case 17 Case 18 Case 19 Case 20
Case 21 Case 22 Case 23
~~10NM
Loa: 364m16.1 kts < 340>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM20°10NM
Loa: 364m16.1 kts < 020>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM 20°~~
Same WaySame Way
~~12NM
Loa: 175m16.1 kts < 180>DCPA : 0.2NMT CPA : 22.4min
Loa: 200m16.1 kts < 000>
300m
Loa: 150m16.1 kts < 270>DCPA : 0.0NMT CPA : 22.4min
7NM~~
Same WayCrossHead-on
~~12NM
Loa: 175m16.1 kts < 180>DCPA : 0.2NMT CPA : 22.4min
Loa: 200m16.1 kts < 000>
300m
Loa: 150m16.1 kts < 270>DCPA : 0.0NMT CPA : 22.4min
7NM~~
1,200m
300m
Loa: 175m18.0 kts < 000>DCPA : 0.6NMT CPA : -
12NM
Loa: 175m16.1 kts <180>
Own ShipLoa: 200m16.1 kts <000>
300m
Loa: 150m16.1 kts <270>
7NM
1,200m
300m
Loa: 150m16.1 kts <270>
Loa: 150m16.1 kts <270>
Loa: 150m16.1 kts <090>
Loa: 150m16.1 kts <106>
7NM
Loa: 175m18.0 kts <000>
Same WaySame Way
Same WayCrossHead-onCrossHead-on
4
~~10NM
Loa: 175m16.1 kts < 340>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM20°10NM
Loa: 175m16.1 kts < 020>DCPA : 0.0NMT CPA : 37.3min
Loa: 200m16.1 kts < 000>
10NM 20°~~
15°0.00' N
15°10.00' N
129°40.00' E 129°50.00' E 130°0.00' E 130°10.00' EN
0 10NM
0 20000m
5
Bungo-Suidou
Planed Route
33°50.00' N
34°0.00' N
34°10.00' N
134°30.00' E 134°40.00' E 134°50.00' E 135°0.00' E 135°10.00' EN
0 10NM
0 20000m
Kii-Suidou
Planed Route

①② ④
③
⑤
⑥
⑦
36
Same WayCrossHead-on
12NM
Loa: 175m16.1 kts <180>
Own ShipLoa: 200m16.1 kts <000>
300m
Loa: 150m16.1 kts <270>
7NM
1,200m
300m
Loa: 150m16.1 kts <270>
Loa: 150m16.1 kts <270>
Loa: 150m16.1 kts <090>
Loa: 150m16.1 kts <106>
7NM
Loa: 175m18.0 kts <000>

SHIP: IRISLEADER[Loa=200 .0m, B=34 .8m]
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32Time[min]
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
OG[kts]
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32Time[min]
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
Rudder(S)[deg]
OG Speed [kts]
Rudder [deg.]
②
① ④
③
⑤
⑥
⑦
15°0.00' N
15°10.00' N
0 5NM
0 10000m 0 min 16.1 kts <000>
3 min 12.5 kts <008>
6 min 12.7 kts <011>
9 min 13.7 kts <010>
12 min 15.1 kts <011>
15 min 15.2 kts <010>
18 min 15.2 kts <012>
21 min 16.2 kts <002>
24 min 12.6 kts <357>
27 min 11.1 kts <358>
30 min 11.0 kts <359>
33 min 11.0 kts <358>
37

相対航跡図 評価領域図
② ②①①
③
④
⑤
⑤
⑥
⑦
⑦
⑥
④
Own Ship
⑦
38


















