Studienrichtungen Automation, Measurement & Control ...
33
Studienrichtung AMR Studienrichtungen • Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik • Electric Power Engineering Elektroenergietechnik • Geräte- und Mikrotechnik Kommunikationstechnik • Informationstechnik Informationselektronik • Mikroelektronik Mikro-/Opto-/Nanoelektronik
Transcript of Studienrichtungen Automation, Measurement & Control ...
Studienrichtung AMR
Studienrichtungen
• Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik
• Electric Power EngineeringElektroenergietechnik
• Geräte- und MikrotechnikKommunikationstechnik
• InformationstechnikInformationselektronik
• MikroelektronikMikro-/Opto-/Nanoelektronik
Folie 2
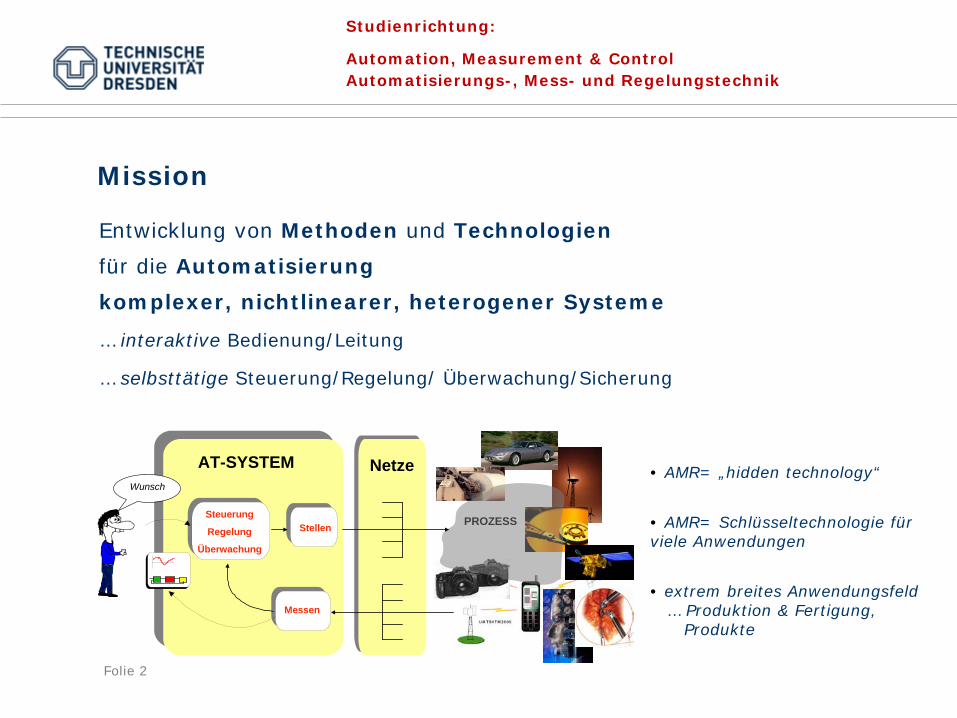
Mission
Entwicklung von Methoden und Technologienfür die Automatisierung komplexer, nichtlinearer, heterogener Systeme
… interaktive Bedienung/Leitung
… selbsttätige Steuerung/Regelung/ Überwachung/Sicherung
• AMR= „hidden technology“
• extrem breites Anwendungsfeld… Produktion & Fertigung,
Produkte
• AMR= Schlüsseltechnologie für viele Anwendungen
PROZESS
Messen
Steuerung
RegelungÜberwachung
AT-SYSTEM
Stellen
Wunsch
Netze
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik
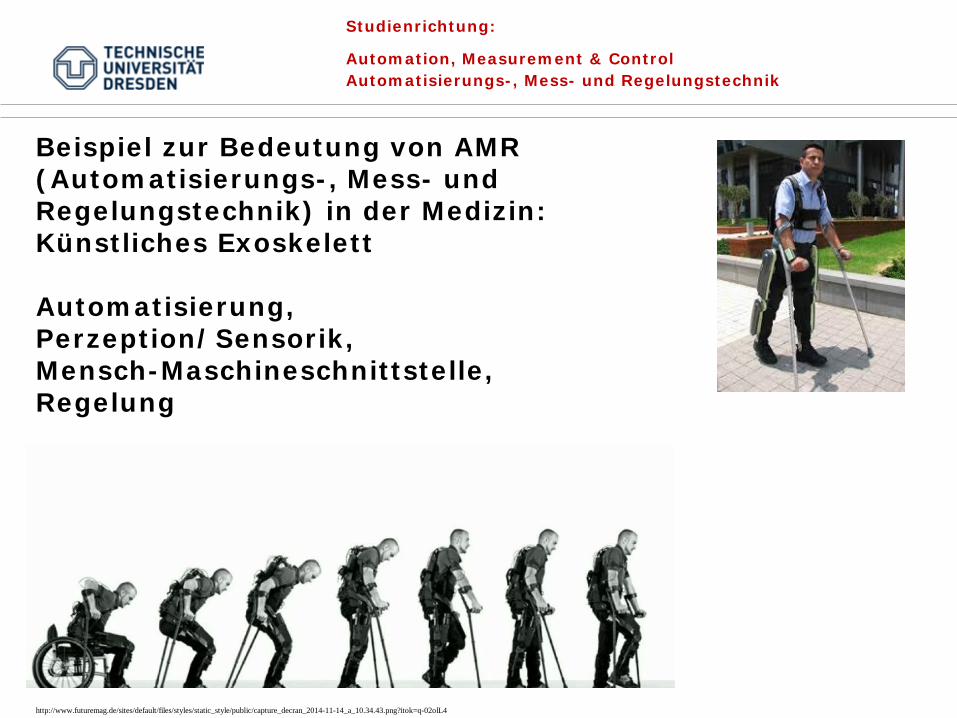
Beispiel zur Bedeutung von AMR (Automatisierungs-, Mess- und Regelungstechnik) in der Medizin:Künstliches Exoskelett
Automatisierung, Perzeption/Sensorik, Mensch-Maschineschnittstelle, Regelung
http://www.futuremag.de/sites/default/files/styles/static_style/public/capture_decran_2014-11-14_a_10.34.43.png?itok=q-02olL4
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik

Anfordungen an AMR-Ingenieure: Interdisziplinäres Projekt- und Lösungsgeschäft
• Aufgaben: Charakterisierung, Modellierung, Planung, Realisierung und Anwendung von AMR für komplexe technische Systeme
• Beispiel Schweißroboter – Automatisierungstechnik: Bahnplanung,
Trajektorienerzeugung, Modellbildung, Datenfusion– Mess- und Sensorsystemtechnik: Smarte adaptive
Sensorsysteme, Echtzeitdatenverarbeitung– Regelungs- und Steuerungstheorie: Regelung
nichtlinearer System, Überwachung– Prozessleittechnik: Informationstechnische
Modellierung und Einbettung in die Digitale Anlage,Mensch-Maschine-Kommunikation
Studienrichtung AMR Folie 4
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik
Quelle: KUKA Robotor GmbH + isravision.com
Folie 5
Herausforderungen 2025
Beiträge von AMR zur Lösung gesellschaftlicher Herausforderungen
• Globalisierung verkürzte Produktzyklen, flexible Produktion,
Individualisierung
• Ressourceneffizienz Erhöhung der Effizienz von Kraftwerken
und chemischen Anlagen
• Ökologie Messung und Vermeidung von Schadstoffen und
Lärm, Sicherung der Luft- und Wasserqualität
• Verkehr Mobilität, Sicherheit (Reduktion Verkehrstote,…)
• Demographischer Wandel Steigerung Lebensqualität,
Gesundheit, Roboter im Haushalt
Studienrichtung:
Automation, Measurement & Control Automatisierungs-, Mess- und Regelungstechnik

Hauptseminar AMR – WS19/205. Semester, 2 SWS, 4 LP, Team- und Projektarbeit
Autonomes Fahren - Einparkassistent
ET - Studienrichtung AMRAutomatisierungs-, Mess- und Regelungstechnik
LEGO Mindstorms NXT Roboter Parcour mit Parklücken
7‘‘ Android 4 Tablet
Ziel:• Straßenverlauf folgen• passende Parklücken finden• Parkvorgang autonom durchführen
Vorführender
Präsentationsnotizen
Ziel ist es, dass das Fahrzeug dem Straßenverlauf folgt, eine passende Parklücke identifiziert und den Parkvorgang eigenständig durchführt
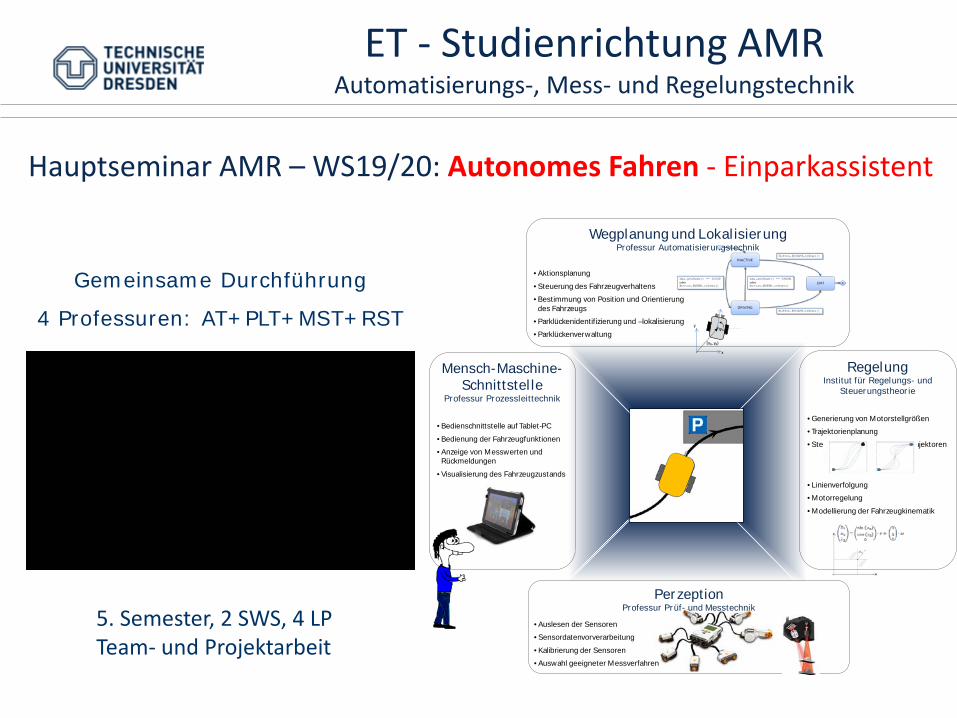
Gemeinsame Durchführung
4 Professuren: AT+PLT+MST+RST
RegelungInstitut für Regelungs- und
Steuerungstheor ie
• Generierung von Motorstellgrößen• Trajektorienplanung• Steuerung/Regelung entlang Trajektoren
• Linienverfolgung• Motorregelung
• Modellierung der Fahrzeugkinematik
Wegplanung und Lokal isierung Professur Automatisierungstechnik
• Aktionsplanung
• Steuerung des Fahrzeugverhaltens• Bestimmung von Position und Orientierung
des Fahrzeugs• Parklückenidentifizierung und –lokalisierung• Parklückenverwaltung
x
y
(xR, yR)
ϕR
Mensch-Maschine-Schnittstel le
Professur Prozessleittechnik
• Bedienschnittstelle auf Tablet-PC
• Bedienung der Fahrzeugfunktionen• Anzeige von Messwerten und
Rückmeldungen
• Visualisierung des Fahrzeugzustands
PerzeptionProfessur Prüf- und Messtechnik
• Auslesen der Sensoren• Sensordatenvorverarbeitung
• Kalibrierung der Sensoren• Auswahl geeigneter Messverfahren
ET - Studienrichtung AMRAutomatisierungs-, Mess- und Regelungstechnik
Hauptseminar AMR – WS19/20: Autonomes Fahren - Einparkassistent
5. Semester, 2 SWS, 4 LPTeam- und Projektarbeit

Organisation & Personen:
Studienrichtung AMR Folie 10
Regelungs- und Steuerungstheorie
RSTRöbenack
Automatisierungs-technik
ATJanschek
Prozessleit-technik
PLTUrbas
Mess- und Sensorsystemtechnik
MSTCzarske
AMR (c)
Studienrichtung AMR Folie 17
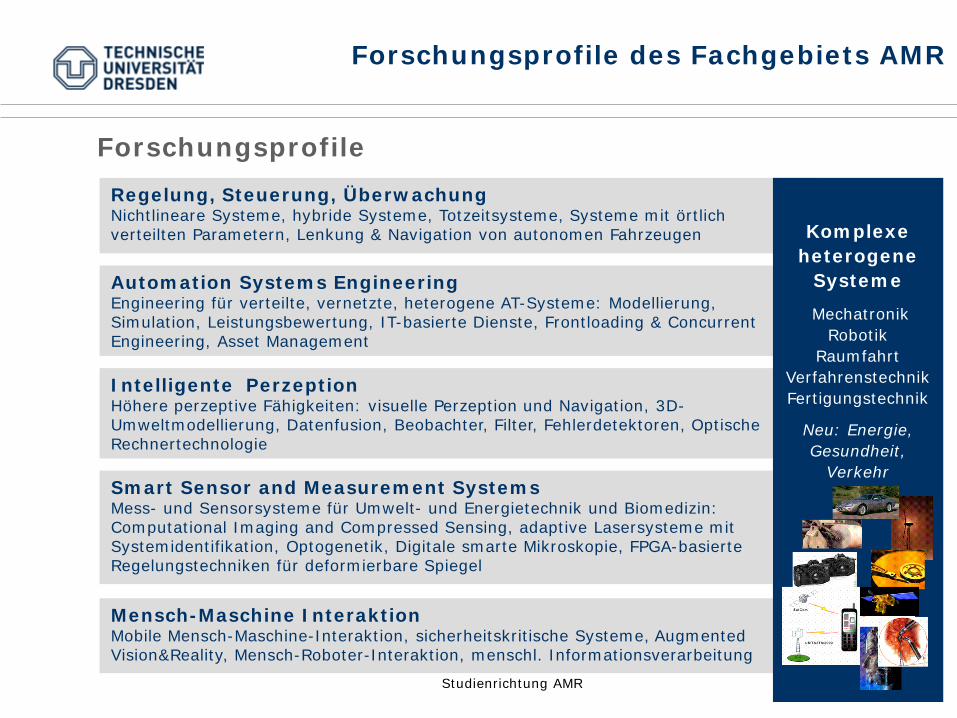
ForschungsprofileRegelung, Steuerung, ÜberwachungNichtlineare Systeme, hybride Systeme, Totzeitsysteme, Systeme mit örtlichverteilten Parametern, Lenkung & Navigation von autonomen Fahrzeugen
Automation Systems EngineeringEngineering für verteilte, vernetzte, heterogene AT-Systeme: Modellierung, Simulation, Leistungsbewertung, IT-basierte Dienste, Frontloading & Concurrent Engineering, Asset Management
Intelligente PerzeptionHöhere perzeptive Fähigkeiten: visuelle Perzeption und Navigation, 3D-Umweltmodellierung, Datenfusion, Beobachter, Filter, Fehlerdetektoren, OptischeRechnertechnologie
Smart Sensor and Measurement SystemsMess- und Sensorsysteme für Umwelt- und Energietechnik und Biomedizin:Computational Imaging and Compressed Sensing, adaptive Lasersysteme mitSystemidentifikation, Optogenetik, Digitale smarte Mikroskopie, FPGA-basierteRegelungstechniken für deformierbare Spiegel
Mensch-Maschine InteraktionMobile Mensch-Maschine-Interaktion, sicherheitskritische Systeme, Augmented Vision&Reality, Mensch-Roboter-Interaktion, menschl. Informationsverarbeitung
Komplexe heterogene
Systeme
Mechatronik Robotik
Raumfahrt VerfahrenstechnikFertigungstechnik
Neu: Energie, Gesundheit,
Verkehr
Forschungsprofile des Fachgebiets AMR

Professur für Mess- und Sensorsystemtechnik (MST)
Prof. Dr.-Ing. habil. Jürgen Czarske
Fakultät Elektrotechnik und Informationstechnik, Professur MST
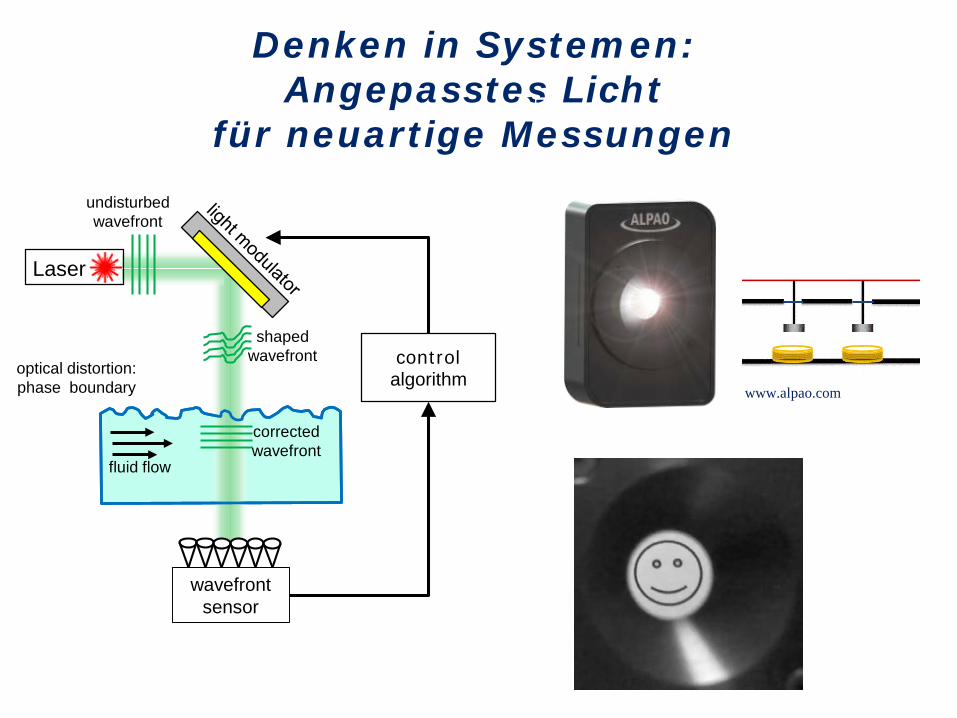
shapedwavefront
undisturbedwavefront
correctedwavefront
controlalgorithm
Laser
optical distortion: phase boundary
wavefrontsensor
fluid flow
Denken in Systemen:Angepasstes Licht
für neuartige Messungen 25
www.alpao.com
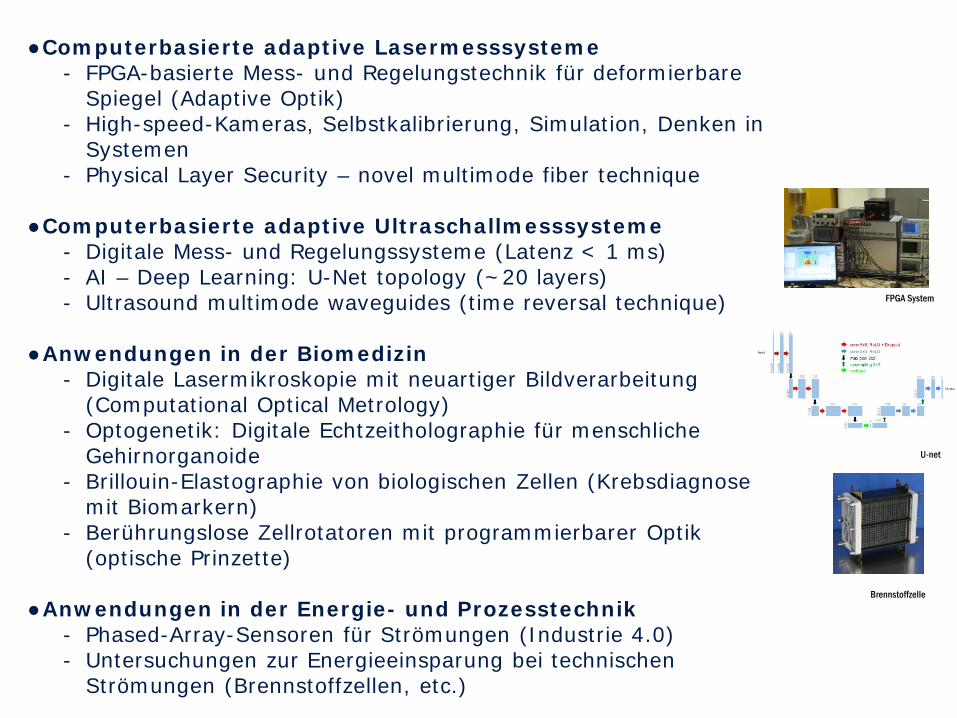
●Computerbasierte adaptive Lasermesssysteme- FPGA-basierte Mess- und Regelungstechnik für deformierbare
Spiegel (Adaptive Optik)- High-speed-Kameras, Selbstkalibrierung, Simulation, Denken in
Systemen- Physical Layer Security – novel multimode fiber technique
●Computerbasierte adaptive Ultraschallmesssysteme- Digitale Mess- und Regelungssysteme (Latenz < 1 ms)- AI – Deep Learning: U-Net topology (~20 layers)- Ultrasound multimode waveguides (time reversal technique)
●Anwendungen in der Biomedizin- Digitale Lasermikroskopie mit neuartiger Bildverarbeitung
(Computational Optical Metrology)- Optogenetik: Digitale Echtzeitholographie für menschliche
Gehirnorganoide- Brillouin-Elastographie von biologischen Zellen (Krebsdiagnose
mit Biomarkern)- Berührungslose Zellrotatoren mit programmierbarer Optik
(optische Prinzette)
●Anwendungen in der Energie- und Prozesstechnik- Phased-Array-Sensoren für Strömungen (Industrie 4.0)- Untersuchungen zur Energieeinsparung bei technischen
Strömungen (Brennstoffzellen, etc.)
FPGA System
U-net
Brennstoffzelle
Professur fürMess- und Sensorsystemtechnik
Verzerrung von Licht
Senkrechtstarter Harrier II Glas mit Sprudel
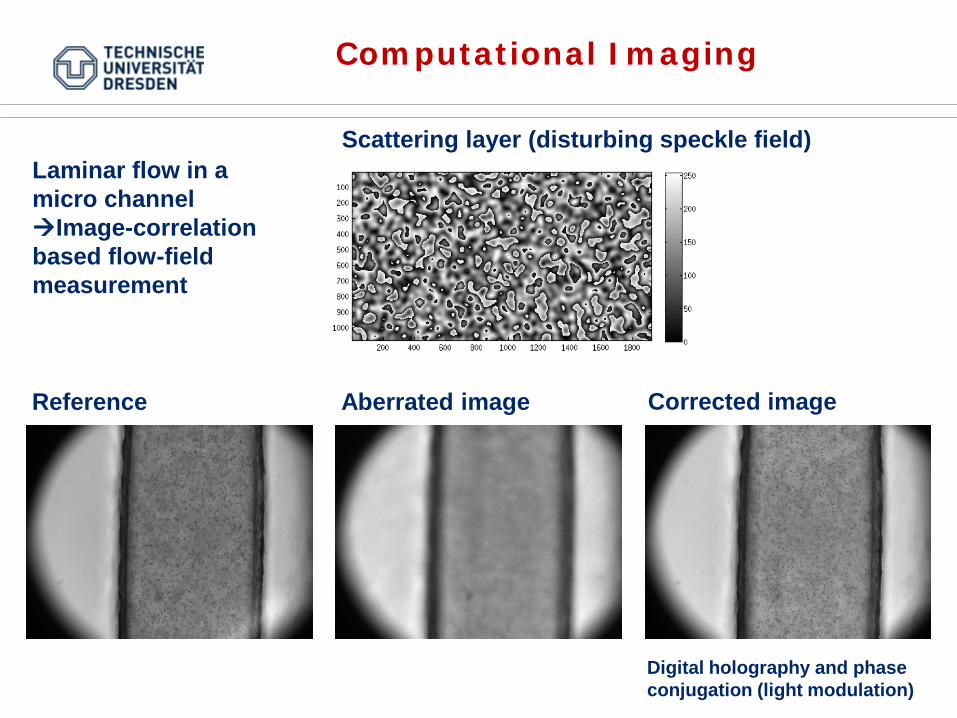
Computational Imaging
Reference
Laminar flow in a micro channelImage-correlationbased flow-fieldmeasurement
Scattering layer (disturbing speckle field)
Aberrated image Corrected image
Digital holography and phaseconjugation (light modulation)
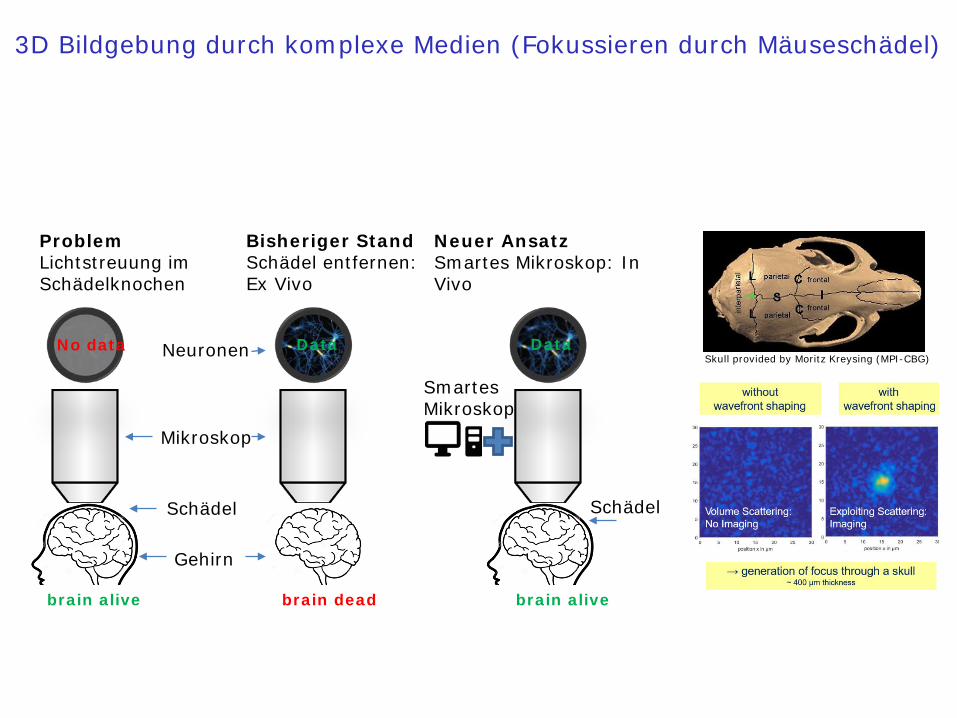
3D Bildgebung durch komplexe Medien (Fokussieren durch Mäuseschädel)
ProblemLichtstreuung imSchädelknochen
Bisheriger StandSchädel entfernen:Ex Vivo
Neuronen
Neuer AnsatzSmartes Mikroskop: In Vivo
Mikroskop
Schädel
Gehirn
brain alive
No data
brain dead
Data Data
brain alive
SmartesMikroskop
Skull provided by Moritz Kreysing (MPI-CBG)
Schädel
Studienrichtung AMR
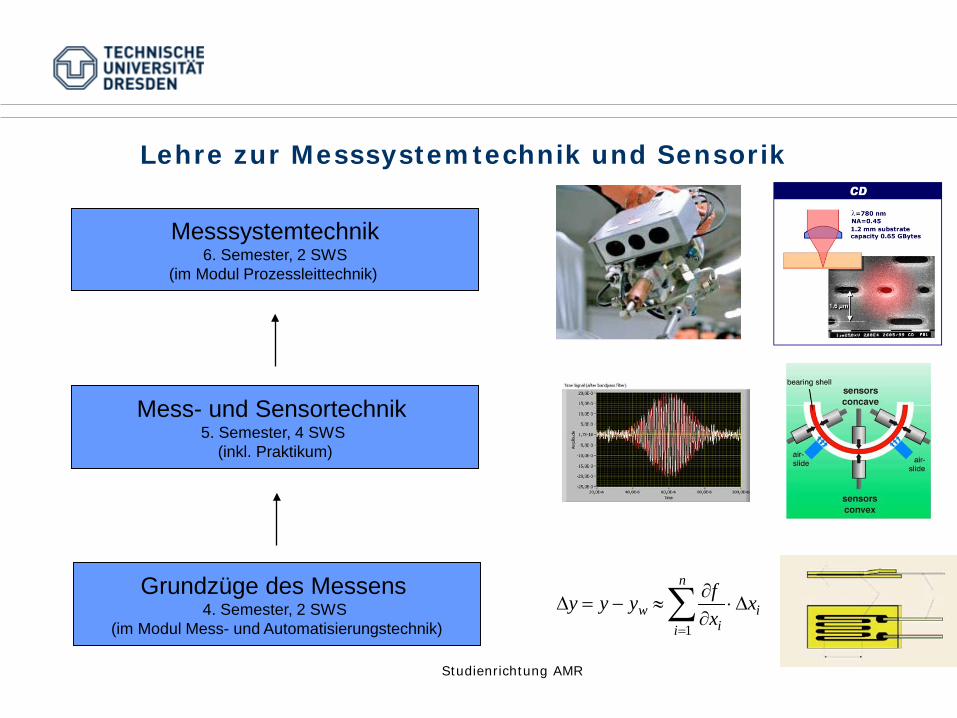
Lehre zur Messsystemtechnik und Sensorik
Mess- und Sensortechnik 5. Semester, 4 SWS
(inkl. Praktikum)
Grundzüge des Messens 4. Semester, 2 SWS
(im Modul Mess- und Automatisierungstechnik)
Messsystemtechnik6. Semester, 2 SWS
(im Modul Prozessleittechnik)
1
n
w iii
fy y y xx
=
∂∆ = − ≈ ⋅∆
∂∑
Professur für Prozessleittechnik
Prof. Dr.-Ing. habil. Leon Urbas
Fakultätsname ETIT Institut für Automatisierungstechnik, Professur für Prozessleittechnik
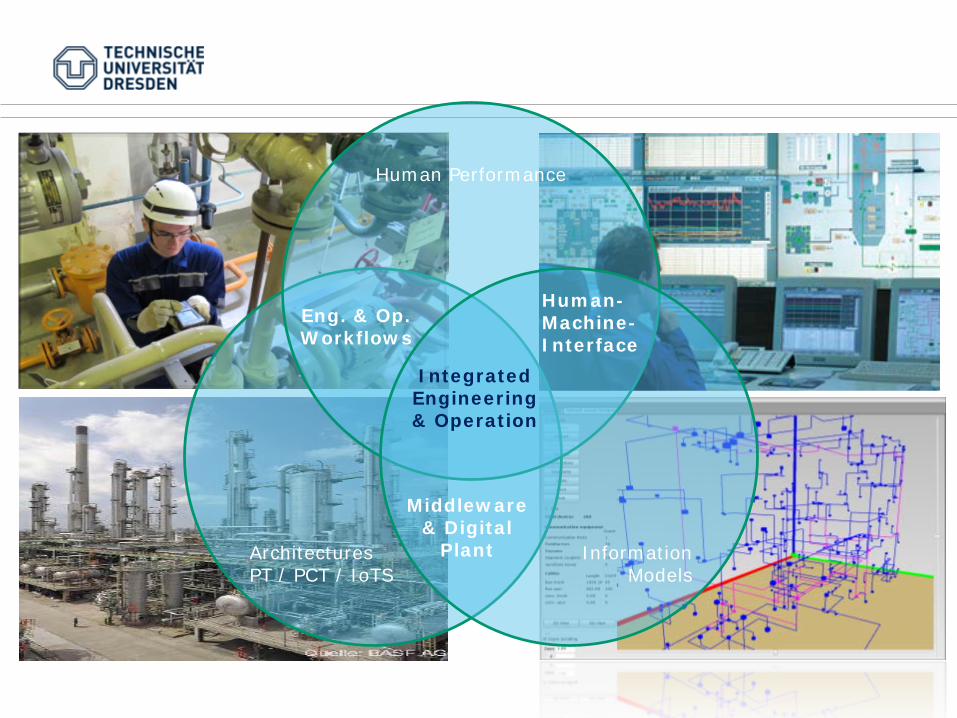
ArchitecturesPT / PCT / IoTS
Human Performance
InformationModels
Human-Machine-Interface
Eng. & Op.Workflows
Middleware & Digital
Plant
IntegratedEngineering& Operation
Studienrichtung AMR 33
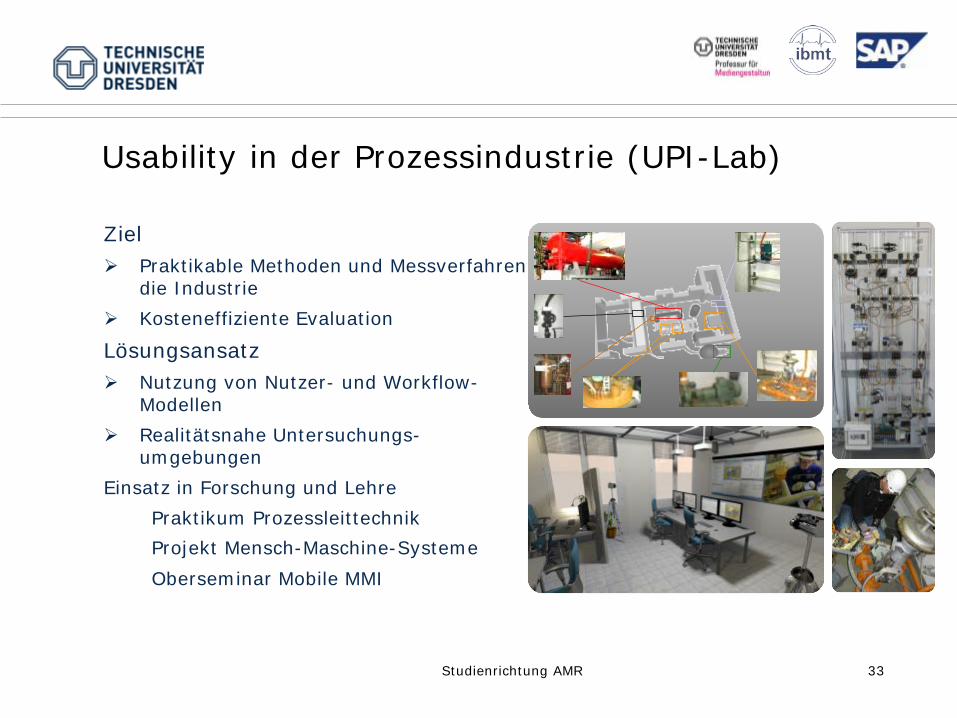
Ziel Praktikable Methoden und Messverfahren für
die Industrie Kosteneffiziente Evaluation
Lösungsansatz Nutzung von Nutzer- und Workflow-
Modellen Realitätsnahe Untersuchungs-
umgebungenEinsatz in Forschung und Lehre
Praktikum ProzessleittechnikProjekt Mensch-Maschine-SystemeOberseminar Mobile MMI
Usability in der Prozessindustrie (UPI-Lab)
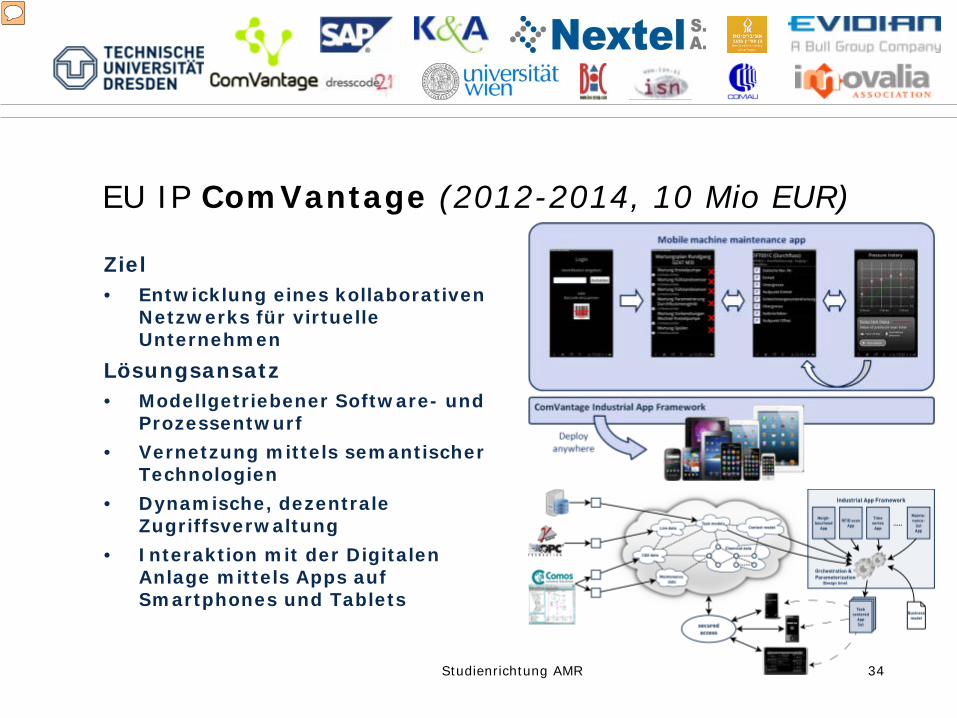
EU IP ComVantage (2012-2014, 10 Mio EUR)
Ziel• Entwicklung eines kollaborativen
Netzwerks für virtuelle Unternehmen
Lösungsansatz• Modellgetriebener Software- und
Prozessentwurf• Vernetzung mittels semantischer
Technologien• Dynamische, dezentrale
Zugriffsverwaltung• Interaktion mit der Digitalen
Anlage mittels Apps auf Smartphones und Tablets
Studienrichtung AMR 34
Vorführender
Präsentationsnotizen
Collaborative Manufacturing Network for Competitive Advantage
Professur für Regelungs- und Steuerungs-theorie
Prof. Dr.-Ing. habil. Dipl.-Math. Klaus Röbenack
Fakultät Elektrotechnik und Informationstechnik Institut für Regelungs- und Steuerungstheorie
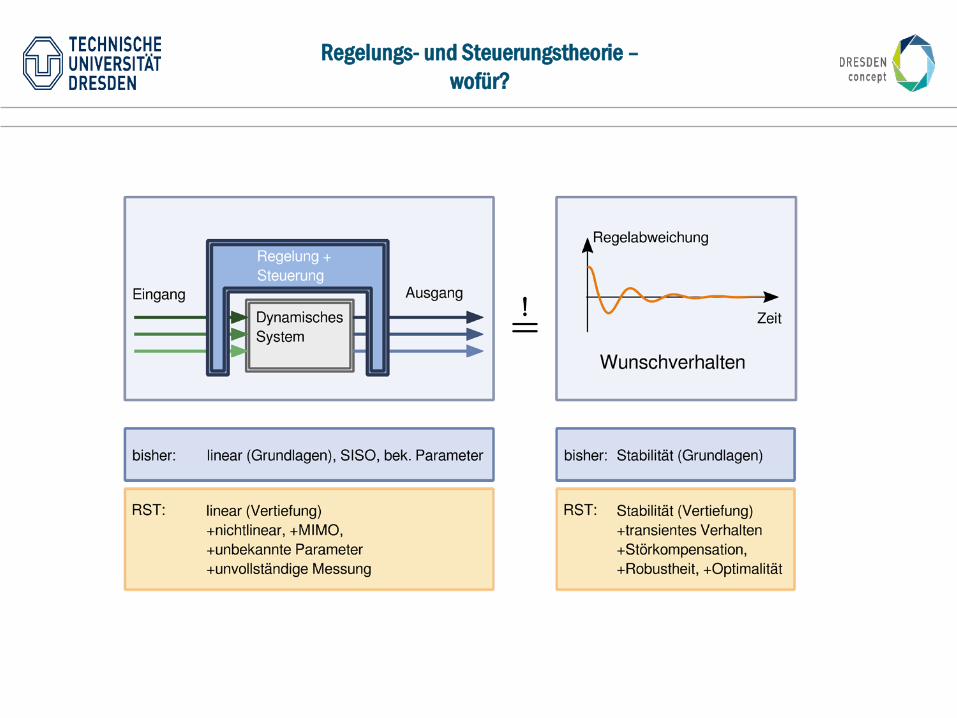
Regelungs- und Steuerungstheorie –wofür?
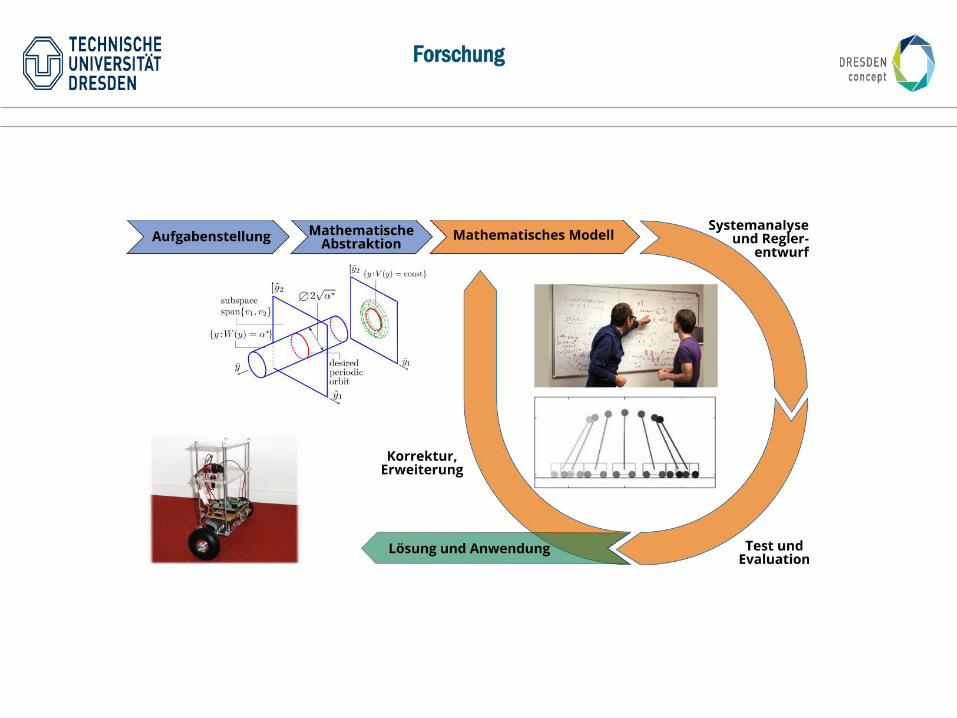
Forschung
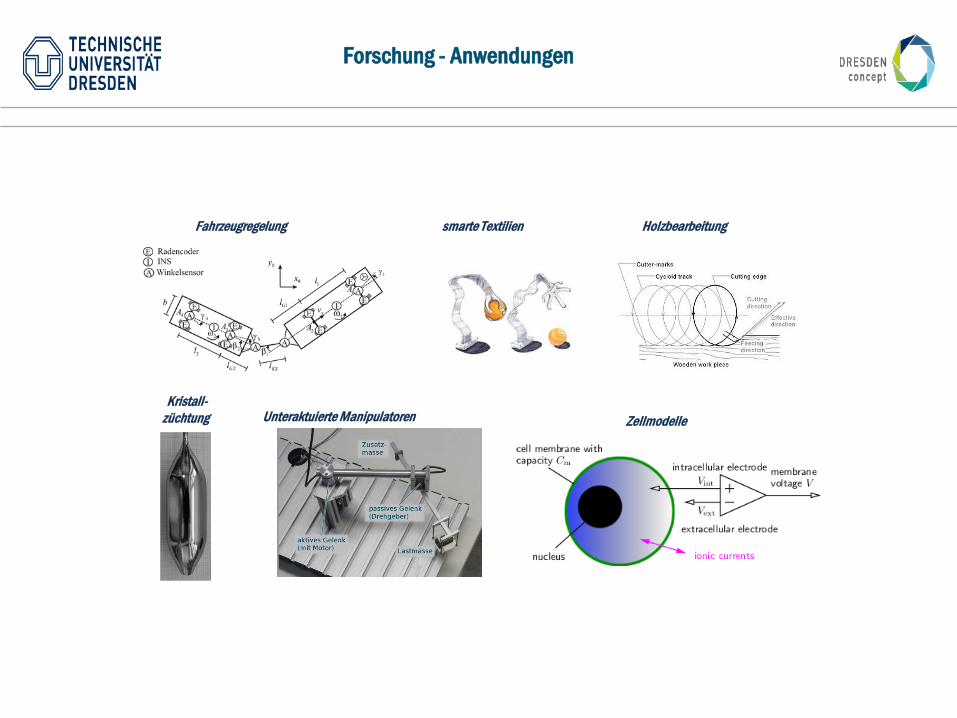
Forschung - Anwendungen
Kristall-züchtung
Holzbearbeitungsmarte TextilienFahrzeugregelung
ZellmodelleUnteraktuierte Manipulatoren
Vorlesungen: Regelungstechnik 1+2 Nichtlineare Regelungstechnik 1+2 Mehrgrößenregelung Prozessidentifikation Flachheitsbasierte Folgeregelung Optimale Steuerung Robuste Regelung
Zusätzlich Methodenwissen: Numerik Computer-Algebra Programmierung
Lehre – Vorlesungen/ Übungen

Didaktisch optimierte Praktikumsversuche zurErgänzung und Vertiefung der Theoriekenntnisse
Drehzahlregelung Schwebekörper Helikopter Mobiler balancierender Roboter Dreifachpendel
Lehre – Praktika

Professur für Automatisierungstechnik
Prof. Dr.techn. Klaus Janschek
Fakultätsname ETIT Institut für Automatisierungstechnik
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
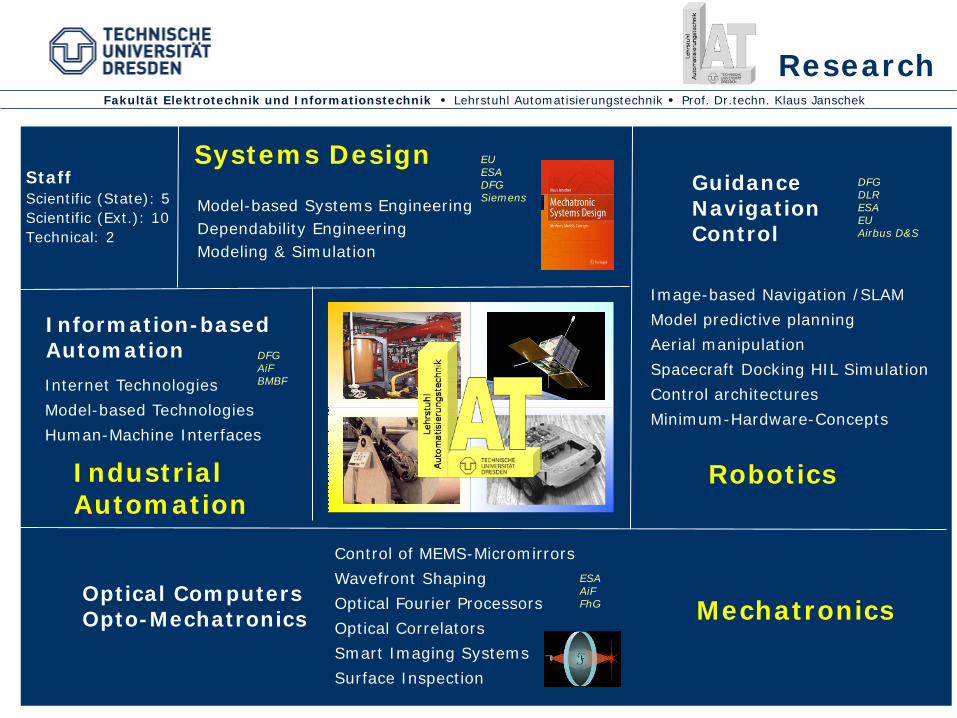
GuidanceNavigation Control
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Robotics
Information-basedAutomationInternet Technologies Model-based TechnologiesHuman-Machine Interfaces
Industrial Automation
Systems Design
Research
Image-based Navigation /SLAMModel predictive planningAerial manipulationSpacecraft Docking HIL SimulationControl architecturesMinimum-Hardware-Concepts
DFGDLRESAEUAirbus D&S
ESA AiFFhG
DFGAiFBMBF
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
StaffScientific (State): 5Scientific (Ext.): 10 Technical: 2
Mechatronics
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
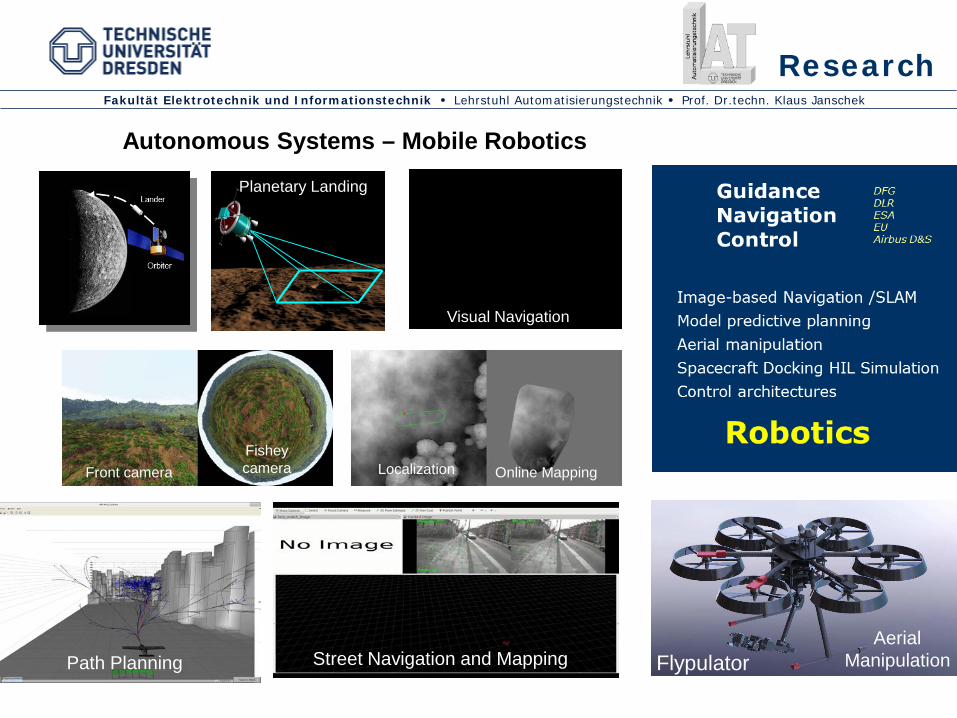
FlypulatorAerial
ManipulationStreet Navigation and Mapping
Planetary Landing
Visual Navigation
FisheycameraFront camera Localization Online Mapping
Path Planning
Autonomous Systems – Mobile Robotics
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
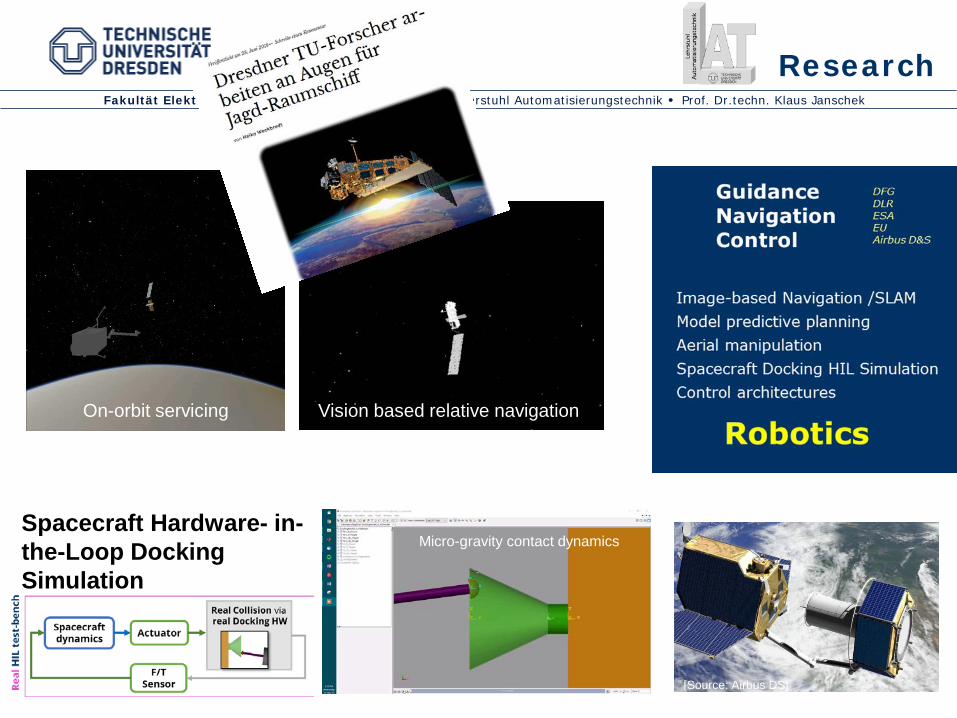
Vision based relative navigationOn-orbit servicing
[Source: Airbus DS]
Spacecraft Hardware- in-the-Loop Docking Simulation
Micro-gravity contact dynamics
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
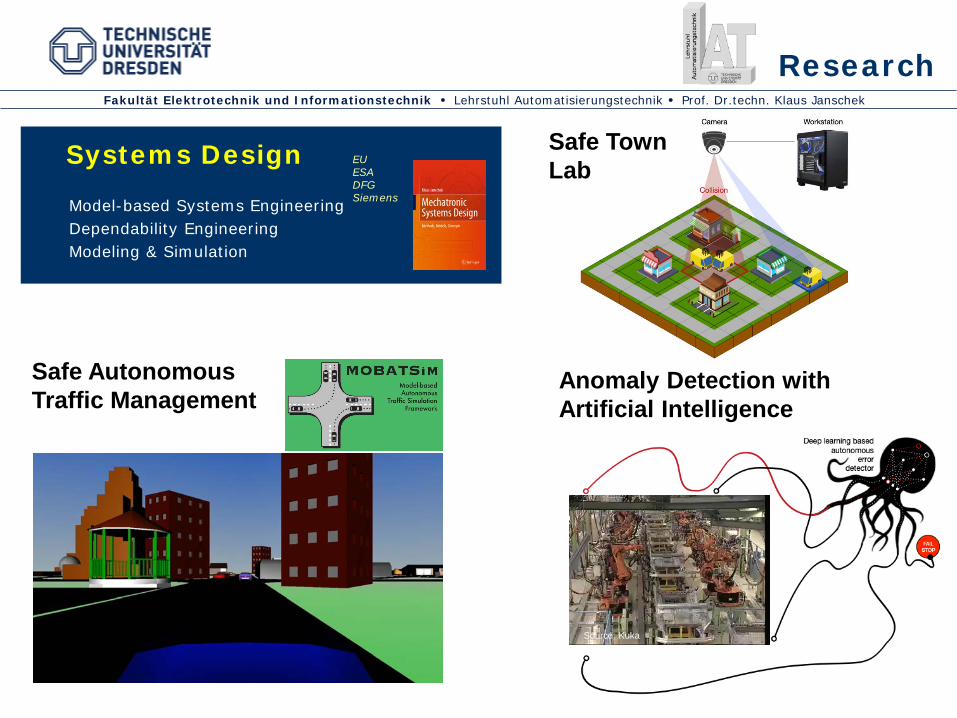
Systems Design
Research
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
Safe Town Lab
Anomaly Detection withArtificial Intelligence
Safe AutonomousTraffic Management
Source: Kuka
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
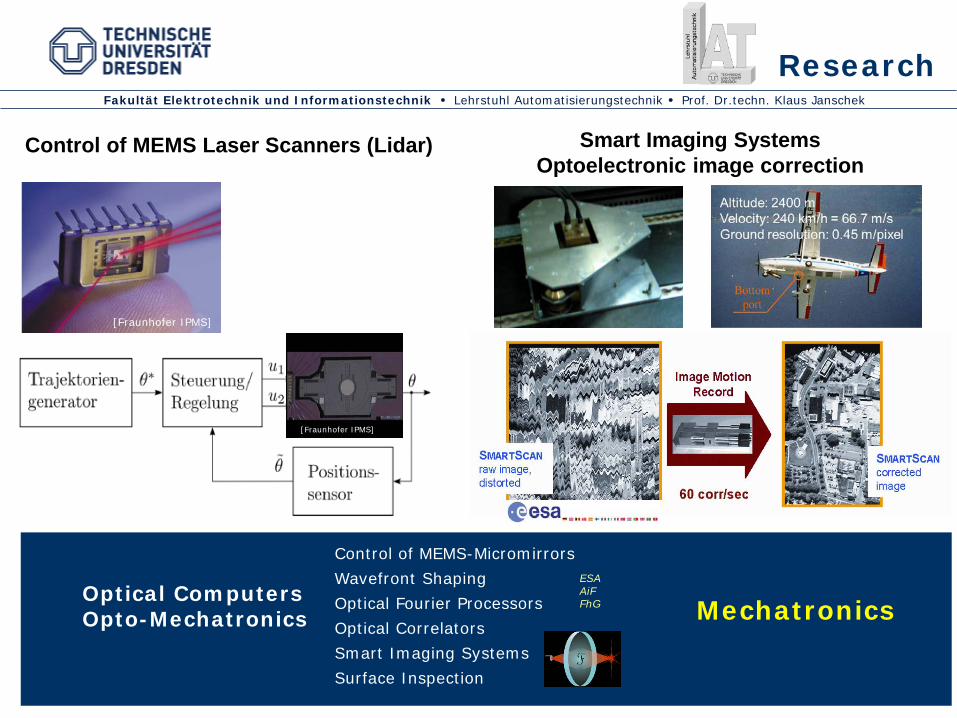
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Research
ESA AiFFhG Mechatronics
Control of MEMS Laser Scanners (Lidar)
[Fraunhofer IPMS]
Smart Imaging Systems Optoelectronic image correction
[Fraunhofer IPMS]
Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Lehre
Diplom-/Masterstudiengänge• Elektrotechnik• Mechatronik• Informationssystemtechnik• Regenerative Energiesysteme• Wirtschaftsingenieure• Maschinenbau (Luft- und Raumfahrt)
Lehrveranstaltungen• Automatisierungstechnik (Grundstudium)
• Ereignisdiskrete Systeme 1, 2 (+P)
• Modellbildung & Simulation (+P)
• Systementwurf (+P)
• Industrielle AT : Entwurf eingebetteter Systeme
• Internet in der AT, Teleautomation (P), XML- und Web@AT
• Mechatronische Systeme, Regelung von Mehrkörpersystemen
• Robotik: Steuerung von Manipulatoren + mobilen Robotern
• Bahn- und Lageregelung für Raumfahrzeuge
• Model-based Dependability Analysis
• Seminare: Hauptseminar AMR, Mobile Robotik, Modellbildung & Simulation

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
GuidanceNavigation Control
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Robotics
Information-basedAutomationInternet Technologies Model-based TechnologiesHuman-Machine Interfaces
Industrial Automation
Systems Design
Research
Image-based Navigation /SLAMModel predictive planningAerial manipulationSpacecraft Docking HIL SimulationControl architecturesMinimum-Hardware-Concepts
DFGDLRESAEUAirbus D&S
ESA AiFFhG
DFGAiFBMBF
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
StaffScientific (State): 5Scientific (Ext.): 10 Technical: 2
Mechatronics

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
FlypulatorAerial
ManipulationStreet Navigation and Mapping
Planetary Landing
Visual Navigation
FisheycameraFront camera Localization Online Mapping
Path Planning
Autonomous Systems – Mobile Robotics

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Research
Vision based relative navigationOn-orbit servicing
[Source: Airbus DS]
Spacecraft Hardware- in-the-Loop Docking Simulation
Micro-gravity contact dynamics

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Systems Design
Research
EUESADFGSiemensModel-based Systems Engineering
Dependability EngineeringModeling & Simulation
Safe Town Lab
Anomaly Detection withArtificial Intelligence
Safe AutonomousTraffic Management
Source: Kuka

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Optical Computers Opto-Mechatronics
Control of MEMS-MicromirrorsWavefront ShapingOptical Fourier ProcessorsOptical CorrelatorsSmart Imaging SystemsSurface Inspection
Research
ESA AiFFhG Mechatronics
Control of MEMS Laser Scanners (Lidar)
[Fraunhofer IPMS]
Smart Imaging Systems Optoelectronic image correction
[Fraunhofer IPMS]

Fakultät Elektrotechnik und Informationstechnik Lehrstuhl Automatisierungstechnik Prof. Dr.techn. Klaus Janschek
Lehre
Diplom-/Masterstudiengänge• Elektrotechnik• Mechatronik• Informationssystemtechnik• Regenerative Energiesysteme• Wirtschaftsingenieure• Maschinenbau (Luft- und Raumfahrt)
Lehrveranstaltungen• Automatisierungstechnik (Grundstudium)
• Ereignisdiskrete Systeme 1, 2 (+P)
• Modellbildung & Simulation (+P)
• Systementwurf (+P)
• Industrielle AT : Entwurf eingebetteter Systeme
• Internet in der AT, Teleautomation (P), XML- und Web@AT
• Mechatronische Systeme, Regelung von Mehrkörpersystemen
• Robotik: Steuerung von Manipulatoren + mobilen Robotern
• Bahn- und Lageregelung für Raumfahrzeuge
• Model-based Dependability Analysis
• Seminare: Hauptseminar AMR, Mobile Robotik, Modellbildung & Simulation