Strengths & Drawbacks of MILP, CP and Discrete-Event...
34
Strengths & Drawbacks of MILP, CP and Discrete-Event Simulation based Approaches for Large-Scale Scheduling Pedro M. Castro Assistant Researcher Laboratório Nacional de Energia e Geologia Lisboa, Portugal
Transcript of Strengths & Drawbacks of MILP, CP and Discrete-Event...

Strengths & Drawbacks of MILP, CP and
Discrete-Event Simulation based
Approaches for Large-Scale Scheduling
Pedro M. Castro
Assistant Researcher
Laboratório Nacional de Energia e Geologia
Lisboa, Portugal
Outline
• Basic concepts on scheduling – Types of scheduling problems
– Classification of scheduling models
• Sequential facilities
• Network plants
• Approaches other than mathematical programming – Constraint Programming
– Discrete-Event Simulation
• Full-space models & decomposition algorithms – Hybrid models and solution approaches
• Different concepts or methods are effectively & efficiently combined
• Extensive testing through a case-study – Automated Wet-etch Stations
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 2

Introduction
• Scheduling plays an important role in most manufacturing and service industries – Pulp & Paper, Oil & Gas, Food & Beverages, Pharmaceuticals
• Type of decisions involved – Define production tasks from customer orders
– Assign production tasks to resources (not only equipments)
– Sequence tasks (on a given resource)
– Determine starting and ending times of tasks
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 3
Demand (orders)
A
B
C
D
E
A1 A2 A3
B1 B2
C1
D1 D2
Batching
How many batches? What size?
Batch-unit Assignment
Where each batch is processed?
A1A2
A3
B1
B2
C1D1
D2E1 E1
Sequencing & Timing
In what sequence are batches processed?
U1
U2
A1 A2 A3 C1
D1 D2 B1 B2 E1
Batches
Maravelias et al. (2011)

Classification of scheduling problems (I)
• Structure of production facility
– Sequential
• Lot identity is kept throughout processing stages
– Network
• Mixing and splitting of materials is allowed
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 4
M1
M2
(a) Single-stage (b) Multi-stage
M11
M12
M22
M21MK1
MK2
M23
…M2
M1 M4
M5M3
(c) Multi-purpose
M6
M7
A A
B
B
Make B A
E
B
Make D C D
Make E
0.4
0.6
Maravelias et al. (2011)

Classification of scheduling problems (II)
• Production mode – Batch, continuous or hybrid
• Operation mode – Short-term for highly variable demand
– Periodic (cyclic) for stable demand
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 5
Batch TaskCharacterized by:
duration (h)BA
Continuous TaskCharacterized by:
processing rate (kg/h)BA
Time (h)
Inve
nto
ry (k
g)
Start of task End of task
Fill Draw
Time (h)
Inve
nto
ry (k
g)
Start of task End of task
Fill & Draw

Classification of scheduling problems (III)
• Type of operations – Production but also material transfer (e.g. pipelines)
• Other aspects – Storage policies
• Fixed capacity (shared or not), unlimited or no storage
– Changeovers
• Sequence-dependent (e.g. paints) or not
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 6
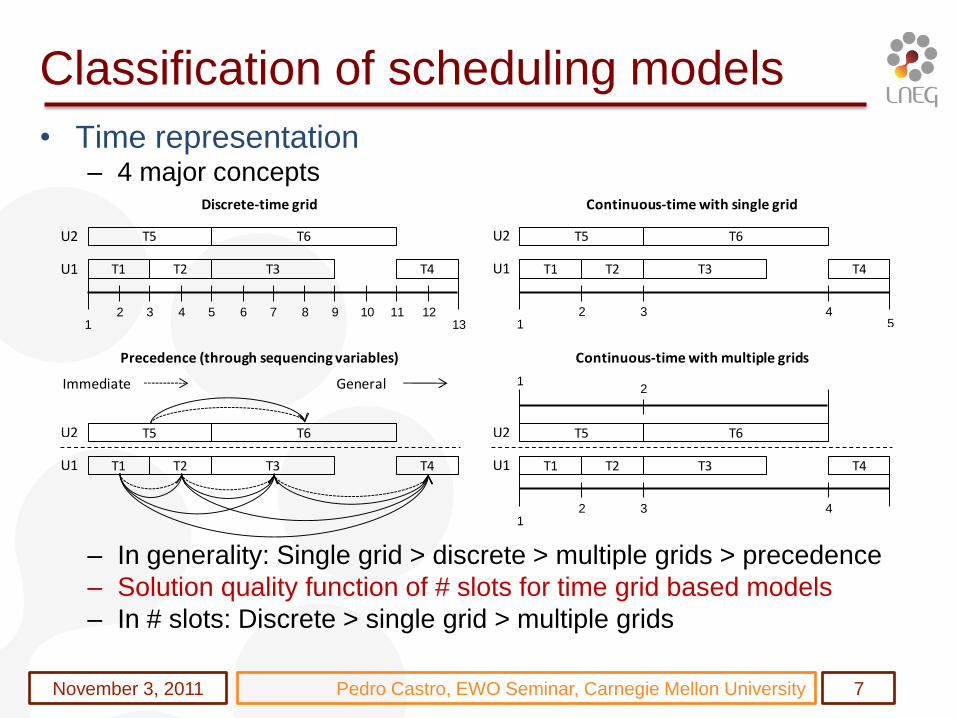
Classification of scheduling models
• Time representation – 4 major concepts
– In generality: Single grid > discrete > multiple grids > precedence
– Solution quality function of # slots for time grid based models
– In # slots: Discrete > single grid > multiple grids
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 7
1 1332 54 76 98 1110 12
T1 T3 T4U1
U2 T5 T6
Discrete-time grid
T2
1 52 3 4
T1 T3 T4U1
U2 T5 T6
Continuous-time with single grid
T2
12 3 4
T1 T3 T4U1
U2 T5 T6
Continuous-time with multiple grids
T2
12
T1 T3 T4U1
U2 T5 T6
Precedence (through sequencing variables)
T2
Immediate General

Models for sequential facilities
• Precedence concept Méndez et al. 2001; Harjunkoski & Grossmann 2002; Gupta & Karimi 2003
– Provide high quality solutions with limited computational resources
– Favored when preordering can be performed a priori (e.g. due dates)
– Set of binary variables for processing tasks can also be used for other discrete resources (e.g. transportation devices)
– Difficult to prove optimality
• Multiple time grids Pinto & Grossmann 1995; Castro & Grossmann 2005; Liu & Karimi 2007; Castro & Novais 2008
– A few options available
– Tighter and computationally superior
– More difficult to understand
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 8
M0 M3 M4 M5 M7 M9 M35 M37 OUTM10 M11 M20M15
P3
P4
P5
P2
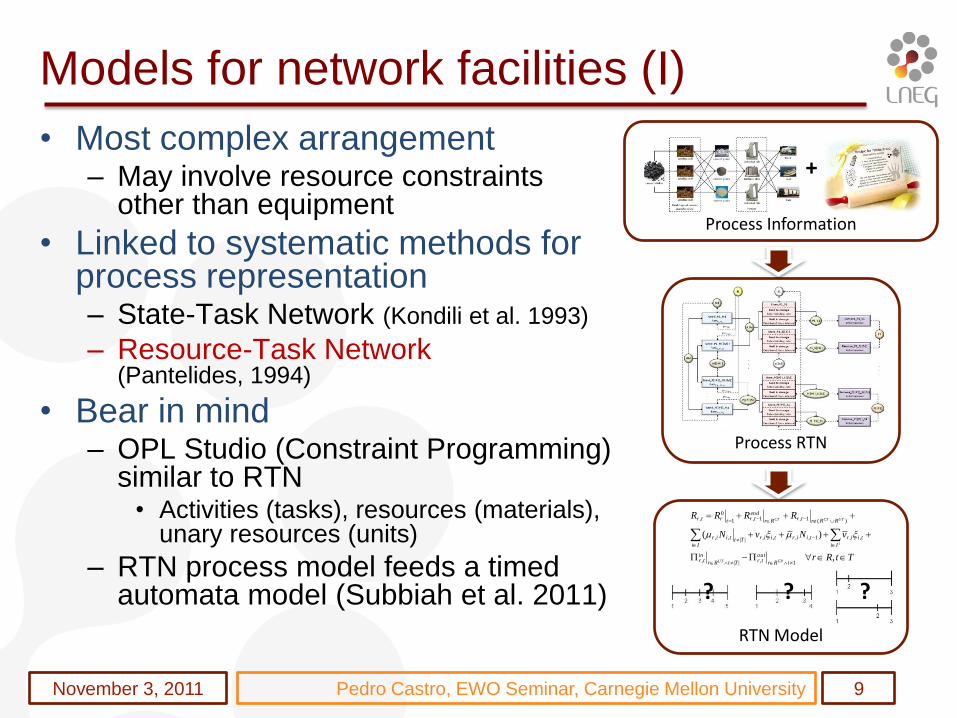
Models for network facilities (I)
• Most complex arrangement – May involve resource constraints
other than equipment
• Linked to systematic methods for process representation – State-Task Network (Kondili et al. 1993)
– Resource-Task Network (Pantelides, 1994)
• Bear in mind – OPL Studio (Constraint Programming)
similar to RTN • Activities (tasks), resources (materials),
unary resources (units)
– RTN process model feeds a timed automata model (Subbiah et al. 2011)
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 9
Process RTN
Process Information
+
RTN Model
TtRr
vNvN
RRRR
tRr
outtrTtRr
intr
Ii
tiir
Ii
tiirtiirTttiir
RRrtrRr
endtrtrtr
FPUT
t
UTCTCT
,
)(
1,||,
,,1,,,,||,,
)(1,1,1
0,
? ? ?
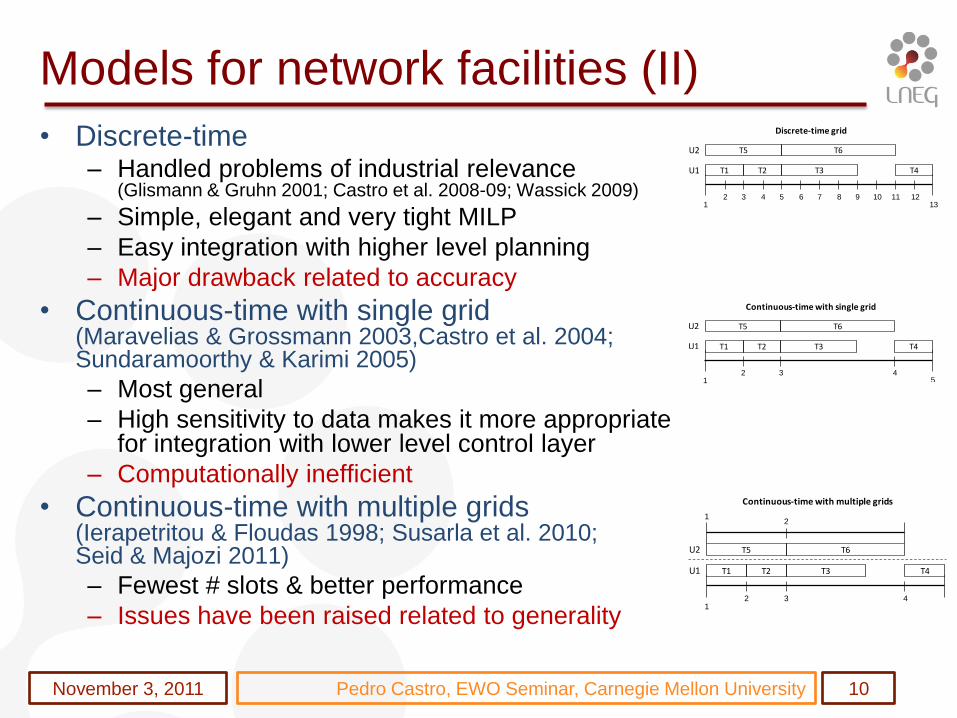
Models for network facilities (II)
• Discrete-time – Handled problems of industrial relevance
(Glismann & Gruhn 2001; Castro et al. 2008-09; Wassick 2009)
– Simple, elegant and very tight MILP
– Easy integration with higher level planning
– Major drawback related to accuracy
• Continuous-time with single grid (Maravelias & Grossmann 2003,Castro et al. 2004; Sundaramoorthy & Karimi 2005)
– Most general
– High sensitivity to data makes it more appropriate for integration with lower level control layer
– Computationally inefficient
• Continuous-time with multiple grids (Ierapetritou & Floudas 1998; Susarla et al. 2010; Seid & Majozi 2011)
– Fewest # slots & better performance
– Issues have been raised related to generality
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 10
1 1332 54 76 98 1110 12
T1 T3 T4U1
U2 T5 T6
Discrete-time grid
T2
1 52 3 4
T1 T3 T4U1
U2 T5 T6
Continuous-time with single grid
T2
12 3 4
T1 T3 T4U1
U2 T5 T6
Continuous-time with multiple grids
T2
12
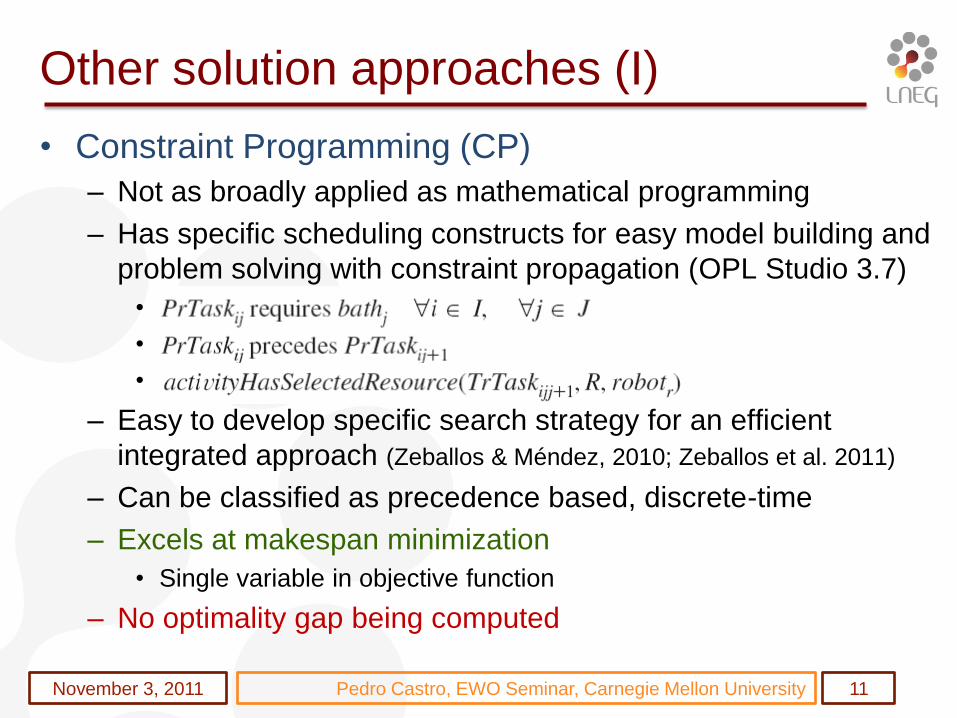
Other solution approaches (I)
• Constraint Programming (CP)
– Not as broadly applied as mathematical programming
– Has specific scheduling constructs for easy model building and
problem solving with constraint propagation (OPL Studio 3.7)
•
•
•
– Easy to develop specific search strategy for an efficient
integrated approach (Zeballos & Méndez, 2010; Zeballos et al. 2011)
– Can be classified as precedence based, discrete-time
– Excels at makespan minimization
• Single variable in objective function
– No optimality gap being computed
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 11

Other solution approaches (II)
• Discrete-event simulation
– Heuristic, rule based approach
– Problem represented as a set
of interlinked modules featuring
algorithms for decision making
– Extremely useful for visualizing
system behavior
• Generate feasible solutions for
complex problems
– Cannot guarantee optimality
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 12


Problem definition
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 16
W CC
ZW ZW
NIS NIS
j=0 j=1 j=2 j=3 j=M j=M+1…
… W
Input
buffer
Output
buffer
i
Jobs
W CC
ZW ZW
NIS NIS
j=0 j=1 j=2 j=3 j=M j=M+1…
… W
Input
buffer
Output
buffer
i
Jobs
CC
ZW ZW
NIS NIS
j=0 j=1 j=2 j=3 j=M j=M+1…
… W
Input
buffer
Output
buffer
i
Jobs
WC
ZW ZW
NIS NIS
j=0 j=1 j=2 j=3 j=M j=M+1…
…C W
Input
buffer
Output
buffer
i
Jobs
W CC
ZW ZW
NIS NIS
j=0 j=1 j=2 j=3 j=M j=M+1…
… W
Input
buffer
Output
buffer
i
Jobs
W
i1
i1
i3i1
i1
i1
i3i1
i1
i1
i3
i3
Un
its
Processing Time Transfer Time
Timej1
j2
j3
Holding Time
Job Sequence i1-i3-i2
Robot
i1
i1
i3i1
i1
i1
i3
i3
i2
i2i3
i2
MK
... ... ...
...
...
...
robot schedule
bath schedule
ZW “Zero Wait ”
MIS “Mixed-intermediate Storage”
Buffer
Bath j C = “Chemical Bath”
j=1,3,5...M-1
W = “Water Bath”
j=2,4,6...M
Input buffer j=0
Output buffer j=M+1
NIS “Non-intermediate Storage”
m
m
m=1 m=2 m=3 m=|M|-1 m=|M |
m1
m2
m3
• Automated Wet-Etch Station (AWS)
Objective function: minimize makespan

Best MILP model (Castro et al. 2011)
• Hybrid in terms of time representation concept (Bhushan & Karimi, 2003)
– Multiple time grids for processing tasks
• Why is it a good approach?
– Single unit per stage
» No uncertainty in # time slots to specify
» Global optimality ensured with # slots= # wafer lots
(no iterative search procedure)
– Lot sequence unchanged throughout stages due to storage policies
– General precedence for robot transfer tasks
• Why?
– Provides very good solutions in early nodes of the search
» Often difficult to prove optimality (high integrality gap at termination)
– Alternative of a robot grid with too many time slots (|I|×|M|)
» Resulted in a much worse computational performance
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 18

No big-M constraints for processing tasks
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 19
• Slot duration greater lot’s processing time
• Difference in time in consecutive units equal to processing + transfer
• Ending time greater starting time + processing
• Starting time in next unit equal to ending time + transfer
• Exactly one lot per time slot
• Time of last slot in last unit lower than makespan
Un
it m
ZW
LS
Time
i=11
T1,1
2
T1,2
1
T2,1
i=2
i=1 2
T2,2
1
T3,1
i=3
Te1,2
p1,2
2
Te2,2
p2,2
2
T3,2
i=3
Te3,2
p1,2
Robot r
1 1 12 2 2
can hold lot past processing time
do not hold lot past processing time

Robot assignment & sequencing constraints
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 20
• Binary variables – Wt,m,r – assigns robot r to the transfer to unit m of the lot in slot t
• 4 sets of big-M constraints –
– • If same robot, lot i’ to m after transfer i to m+1
–
– • No overlap between transfer of any two lots to different units
m
Tt,m
(i,t)
m+1
m
Tt+1,m
(i',t+1)
(i,t)
m
m+1
2 transfers between processing of
consecutive lots
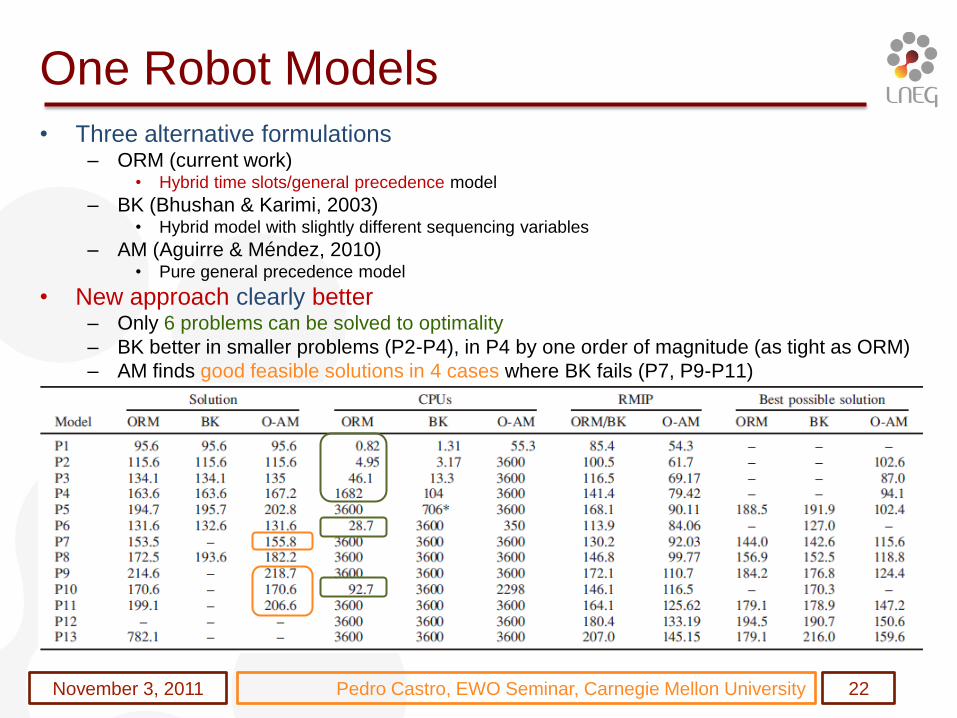
One Robot Models
• Three alternative formulations – ORM (current work)
• Hybrid time slots/general precedence model
– BK (Bhushan & Karimi, 2003) • Hybrid model with slightly different sequencing variables
– AM (Aguirre & Méndez, 2010) • Pure general precedence model
• New approach clearly better – Only 6 problems can be solved to optimality
– BK better in smaller problems (P2-P4), in P4 by one order of magnitude (as tight as ORM)
– AM finds good feasible solutions in 4 cases where BK fails (P7, P9-P11)
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 22

Motivation
• Industry requires decision-making tools that generate good solutions with low computational effort – Guaranteeing optimality looses importance
• Only a subset of the production goals are taken into account
• Implementing the solution as such often limited by dynamic nature of industrial environments
• Real life applications should take advantage of state-of-the art, full-space models – Ability to handle almost all the features that may be
encountered at a process plant
• Need for efficient decomposition approaches that keep number of decisions at a reasonable level – Tunable parameters
• Specific AWS problem – Full-space models only useful up to 12 lots in 12 units
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 24
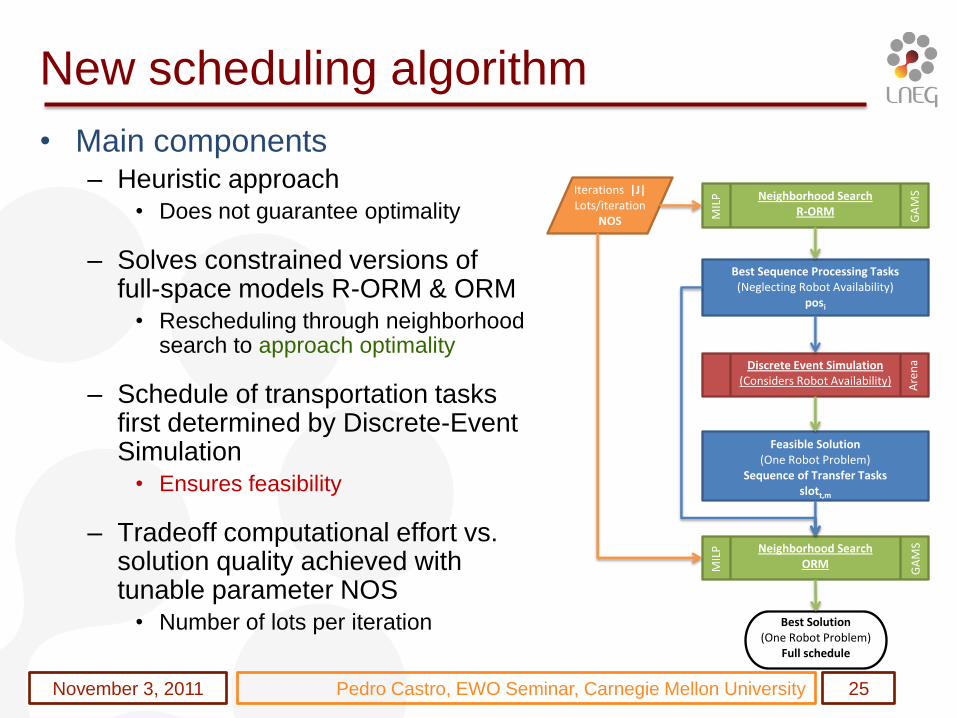
New scheduling algorithm
• Main components – Heuristic approach
• Does not guarantee optimality
– Solves constrained versions of full-space models R-ORM & ORM
• Rescheduling through neighborhood search to approach optimality
– Schedule of transportation tasks first determined by Discrete-Event Simulation
• Ensures feasibility
– Tradeoff computational effort vs. solution quality achieved with tunable parameter NOS
• Number of lots per iteration
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 25
Iterations |J|Lots/iteration
NOS
Best Sequence Processing Tasks(Neglecting Robot Availability)
posi
Neighborhood SearchR-ORMM
ILP
GA
MS
Discrete Event Simulation(Considers Robot Availability) A
ren
a
Feasible Solution(One Robot Problem)
Sequence of Transfer Tasksslott,m
Neighborhood SearchORMM
ILP
GA
MS
Best Solution(One Robot Problem)
Full schedule
Neighborhood Search
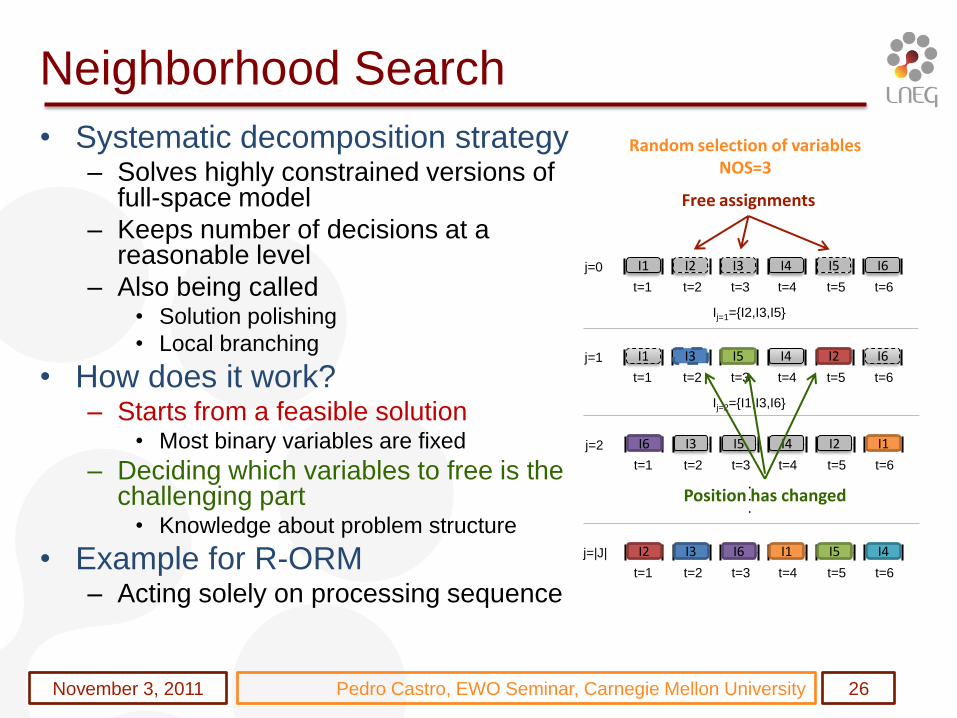
• Systematic decomposition strategy – Solves highly constrained versions of
full-space model
– Keeps number of decisions at a reasonable level
– Also being called • Solution polishing
• Local branching
• How does it work? – Starts from a feasible solution
• Most binary variables are fixed
– Deciding which variables to free is the challenging part
• Knowledge about problem structure
• Example for R-ORM – Acting solely on processing sequence
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 26
t=1 t=2 t=3 t=4 t=5 t=6
I1 I2 I3 I4 I5 I6j=0
Ij=1={I2,I3,I5}
t=1 t=2 t=3 t=4 t=5 t=6
I1 I3 I5 I4 I2 I6j=1
Ij=2={I1,I3,I6}
t=1 t=2 t=3 t=4 t=5 t=6
I6 I3 I5 I4 I2 I1j=2
.
.
.
t=1 t=2 t=3 t=4 t=5 t=6
I2 I3 I6 I1 I5 I4j=|J|
Free assignments
Position has changed
Random selection of variables NOS=3
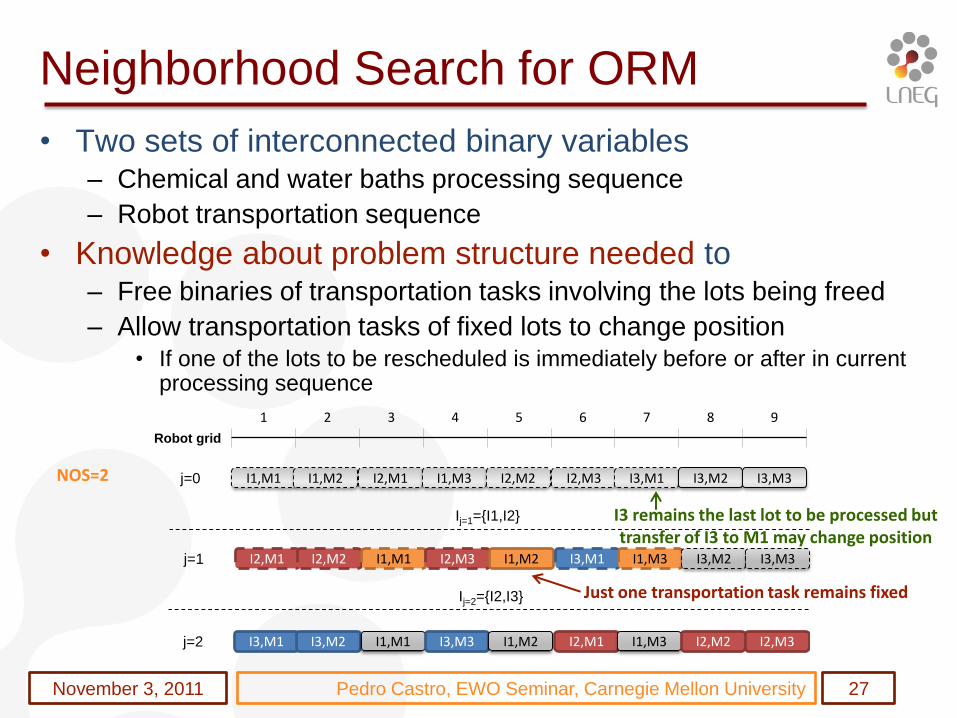
Neighborhood Search for ORM
• Two sets of interconnected binary variables – Chemical and water baths processing sequence
– Robot transportation sequence
• Knowledge about problem structure needed to – Free binaries of transportation tasks involving the lots being freed
– Allow transportation tasks of fixed lots to change position • If one of the lots to be rescheduled is immediately before or after in current
processing sequence
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 27
NOS=2
Robot grid
1 2 3 4 5 6 7 8 9
I1,M1j=0 I1,M2 I2,M1 I1,M3 I2,M2 I2,M3 I3,M1 I3,M2 I3,M3
Ij=1={I1,I2}
I2,M1j=1 I2,M2 I1,M1 I2,M3 I1,M2 I3,M1 I1,M3 I3,M2 I3,M3
Ij=2={I2,I3}
I3,M1j=2 I3,M2 I1,M1 I3,M3 I1,M2 I2,M1 I1,M3 I2,M2 I2,M3
Just one transportation task remains fixed
I3 remains the last lot to be processed but transfer of I3 to M1 may change position

Discrete-Event Simulation
• Very attractive and powerful tool to model, analyze and evaluate the impact of different decisions
• Major advantages – Representation of complex manufacturing processes
– Visualization of the dynamic behavior of its elements
• Arena Simulation Model of entire AWS process – Set of operative rules and strategic decisions on each sub-model
• Internal robot logic to coordinate and effectively synchronize the transportation of jobs between consecutive baths (ensure feasibility)
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 28

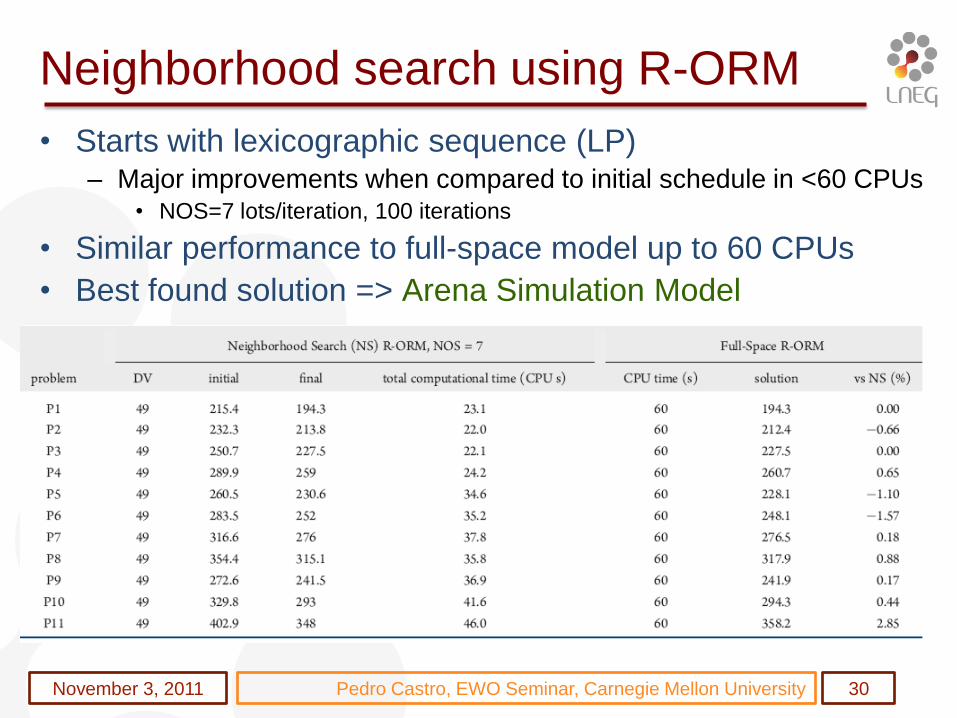
Neighborhood search using R-ORM
• Starts with lexicographic sequence (LP) – Major improvements when compared to initial schedule in <60 CPUs
• NOS=7 lots/iteration, 100 iterations
• Similar performance to full-space model up to 60 CPUs
• Best found solution => Arena Simulation Model
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 30

Discrete-Event Simulation model (Arena)
• Outcome from R-ORM is a lower bound – Schedule may feature transfers occurring simultaneously
• Increase in makespan
• Solution quality rapidly degrades with # baths
• Advantage: Very low computational effort
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 31
Indication of good the approach is!

Neighborhood search using ORM
• Major improvements in solution quality with respect to initial schedule from Arena
• All problems solved in less than 30 min (NOS=2)
• NOS => solution quality & CPUs
• 10 different runs for each NOS value
• Significantly better solutions than CPLEX solution polishing after 60 CPUs1h – With increase in problem size
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 32
Bet
ter
than
so
luti
on
po
lish
ing!

Constraint Programming Approach
• Integrated approach with CP model & efficient domain-specific search strategy
• Competitive full-space approach – Good quality solutions in 1-h CPU
• Less likely for solution to keep improving given additional computational time when compared to neighborhood search
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 33

Best found solution for largest problem
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 34
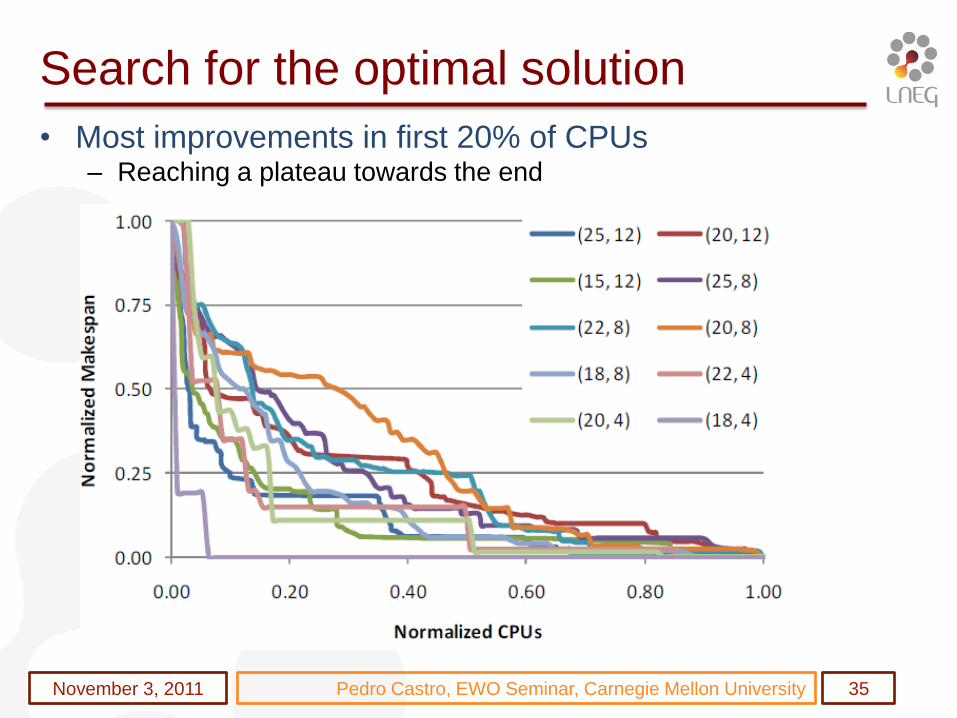
Search for the optimal solution
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 35
• Most improvements in first 20% of CPUs – Reaching a plateau towards the end

Conclusions
• Wide variety of approaches for scheduling problems – Mathematical programming, Constraint Programming,
Discrete-Event Simulation, Heuristics, etc.
• A few alternative efficient models – Good for academic research, bad for industrial problems
• Effective decomposition methods much needed – Good quality solutions with few computational resources
• Tunable parameters for best tradeoff
– Critical to incorporate knowledge about problem structure
• Major improvements are possible
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 36
Method Heuristic algorithm (A2’)
Bhushan & Karimi (2004)
DES CP NS
NOS=2 NOS=3
Better NS
(submitted)
Makespan 478.6 529.9 443.4 428.2 410.7 396.8
Improvement (%) 0.0% -10.7% 7.4% 10.5% 14.2% 17.1%
Acknowledgments
• Carlos Méndez, Luis Zeballos, Adrián Aguirre – Results & animations shown on this talk
• Sponsors – Fundação para a Ciência e Tecnologia & Ministerio de Ciencia,Tecnología e Innovacion
Productiva • Bilateral cooperation agreement Argentina/Portugal (2010-2011)
– Luso-American & National Science Foundations • 2011 Portugal – U.S. Research Networks Program
• References – Scope for Industrial Applications of Production Scheduling Models and Solution Methods.
Review paper on scheduling. Multiple authors. To be submitted to CACE.
– Pedro M. Castro, Luis J. Zeballos and Carlos A. Méndez. Hybrid Time Slots Sequencing Model for a Class of Scheduling Problems. AIChE J. doi:10.1002/aic.12609.
– Adrián M. Aguirre, Carlos A. Méndez and Pedro M. Castro (2011). A Novel Optimization Method to Automated Wet-Etch Station Scheduling in Semiconductor Manufacturing Systems. Comp. Chem. Eng. 35, 2960-2972.
– Pedro M. Castro, Adrián M. Aguirre, Luis J. Zeballos and Carlos A. Méndez. (2011). Hybrid Mathematical Programming Discrete-Event Simulation Approach for Large-Scale Scheduling Problems. Ind. Eng. Chem. Res. 50, 10665-10680.
– Luis J. Zeballos, Pedro M. Castro and Carlos A. Méndez. (2011). An Integrated Constraint Programming Scheduling Approach for Automated Wet-Etch Stations in Semiconductor Manufacturing. Ind. Eng. Chem. Res. 50, 1705-1715.
November 3, 2011 Pedro Castro, EWO Seminar, Carnegie Mellon University 37