Stavebná fakulta Olejníková Tatiana Stanová Eva · PDF...
113
Moderné vzdelávanie pre vedomostnú spoločnosť/ Projekt je spolufinancovaný zo zdrojov EÚ DESCRIPTIVE GEOMETRY Stavebná fakulta Olejníková Tatiana Stanová Eva
Transcript of Stavebná fakulta Olejníková Tatiana Stanová Eva · PDF...

Moderné vzdelávanie pre vedomostnú spoločnosť/ Projekt je spolufinancovaný zo zdrojov EÚ
DESCRIPTIVE GEOMETRY
Stavebná fakulta
Olejníková Tatiana
Stanová Eva

Názov : Descriptive Geometry Autori: Olejníková Tatiana, Stanová EvaRecenzia: nerecenzované Vydavateľ: Technická univerzita v Košiciach Rok: 2015 Vydanie: prvé prepracované Počet výtlačkov: 50 Rozsah: 110
ISBN 978-80-553-1984-1
Rukopis neprešiel jazykovou úpravou. Za odbornú a obsahovú stránku zodpovedajú autori.
Táto publikácia vznikla za finančnej podpory z Európskeho sociálneho fondu v rámci Operačného programu VZDELÁVANIE.
Prioritná os 1 Reforma vzdelávania a odbornej prípravy Opatrenie 1.2 Vysoké školy a výskum a vývoj ako motory rozvoja vedomostnej spoločnosti.
Názov projektu: Balík prvkov pre skvalitnenie a inováciu vzdelávania na TUKE
ITMS 26110230070

DESCRIPTIVE GEOMETRY
Authors
Olejníková Tatiana, Stanová Eva
Technical University of Košice, Civil Engineering Faculty, ÚTMS, Department of Applyed Mathematics
OP Education, Package of innovative features for education reform on TUKE, ITMS: 26110230018
Mission
Show students the possibility of graphic representation of objects three dimensional space by using several types of viewing and positioning solutions and metric relations by using synthetic methods.
Contents and purposes
Purpose of this module is to teach students to use some projection methods. Students will learn the basic characteristics of projection methods used in displaying curves, solids and surfaces and planar sections of the solids.
1. Introduction to Descriptive geometry ...................4
2. Geometric Transformations ...............................12
3. Monge´s Method .................................................20
4. Axonometry .......................................................41
5. Central Projection ...............................................52
6. Linear Perspective ..............................................64
7. Planar Intersection of Elementary Solids ............78
8. Surfaces ..............................................................91
9. Helical Surfaces ....................................................103
Study literature
[1] Stanová, E., Olejníková, T.: Zobrazovacie metódy v deskriptívnej geometrii. SvF TU v Košiciach. 2009.
[2] Olejníková, T.: Basic Descriptive Geometry. SvF TU v Košiciach. 2009 [3] Maligda, J., Stanová, E.: Deskriptívna geometria. SvF TU v Košiciach. 1998. [4] Maligda, J., Schewczuková, Ž. - Stanová, E.: Zbierka príkladov z deskriptívnej
geometrie. SvF TU v Košiciach . 1991. [5] Medek, V., Zámožík, J.: Konštruktívna geometria pre technikov. Bratislava, ALFA.
1989. [6] Olejníková, T., Stanová, E.: Deskriptívna geometria. HF TU v Košiciach, 2001 [7] Velichová, D.:Konštrukčná geometria. STU Bratislava, 1996
3

INTRODUCTION TO DESCRIPTIVE GEOMETRY
Mission
Teach students the basic of the Descriptive geometry. Teach them to work in an Extended Euclidean space with ideal basic figures. Teach them the properties of the planar figures as conic sections and polygons and display them.
Aims
a. Be able to construct the conic sections (ellipse, parabola, hyperbola) by using the pointing construction, hyperosculating circles.
b. Be able to construct the regular polygons.
We live in a three-dimensional world and we often want to represent it in a drawin, painting or a photography, which, however, are two-dimensional.
The aim of Descriptive Geometry is to describe three-dimensional objects in two-dimensional drawings so as to enable their original forms to be reconstructed their correct measures.
Let us explain, in a few words, what is meant by dimension. Considering, for example, a rectangular parallelepipedic box, we can measure its length, width and height, three dimensions in total. This object can be drawn on a sheet of paper having only two extents, width and height.
When representing a three-dimensional object on a two-dimensional surface of our retina, a camera film, a paper sheet, or a TV or computer screen, the number of dimensions is reduced from three to two. This proces of reducing the number of dimensions of an object is called projection. The type of projection generating an image in our eye, on the film of a conventional camera or on the array of electronic sensors of a digital camera is termed as central projection. The images produced this way conveys the sensation of depth, or in other words, the actual space. It is the only projection that produces real perspective. However, drawing in perspective is a tedious job. It is the Descriptive Geometry that makes use of other types of projections, namely the parallel projection, and many cases of the the orthogonal projection. The result is a realistic image of small objects placed at large distances from the viewer.
Descriptive Geometry, as developed by Monge, requires no calculations, graphical constructions only. Although modern computers and software can be used for drawing, the theoretical basic of technical drawing is still derived from Descriptive Geometry. In practical engineering there are instances in which hand-drawings and Descriptive Geometry can be used to verify a solution much faster than by digitizing the data and reverting to a computer. Let the situations when computer is out of our reach. Moreover, research has proven that Descriptive Geometry helps in the development of spatial abilities, qualities essential in many branches of engineering. It also teaches us howh to measure a lenght or an angle in a drawing, or how to obtain such information when direct measuring is impossible to carry out.
BASIC RELATIONS BETWEEN BASIC GEOMETRIC FIGURES
4

Points, lines and planes are basic geometric figures of the space of which more complex geometric figures – curves, surfaces and solids can be created.
Incidence of a point and a line, incidence of a point and a plane, relation "to be located between", congruence of line segments and congruence of angles are thermed as the basic relations between basic geometric figures and are described in a system of axioms determining the notion of geometry. The Euclidean space determined by the Hilbert axiomatic systém, consists of 21 axioms divied into 5 groups: 1. Axioms of incidence – describe the relation of the superposition of points, lines and
planes. 2. Axioms of order – determine the relation "to be located between". 3. Axioms of congruence – describe the congruence of line segments and congruence of
angles. 4. Axioms of continuity – determine the terms for measurements of line segments meeting
certain natural requirements. The length of a line segment must be independent of the place of its realisation and be a real positive number.
5. Axiom of parallelism – for a given point not located on a given line, there exists one and only one line passing through the given point and parallel to the given line.
EXTENDED EUCLIDEAN SPACE ∞E3
Any plane of the Euclidean space E3 is an Euclidean plane, in which the axiomatic system is consistent with system of axioms, i.e. statements not proofed but taken for granted, form the basis for a system of statements and theorems describing the properties of elements in the space, geometry of the space, to be then determined and proofed by the system of axioms.
The Extended Euclidean space ∞E3 is obtained if the Euclidean space E3 will be extended by ideal figures, which are as follows: ideal point, ideal line and ideal plane.
Ideal point
∞U
ab
c
d a
A B
∞U
Let us extend each line a in the space ∞E3 by an ideal point ∞U (point at infinity), which is the common point of all lines in the pencil of lines parallel to the given line a ׀׀ b ׀׀ c ׀׀ d. An ideal point denoted as ∞U is determined by the direction of the line a. On this line a, in space ∞E3, there lie many real points A, B,.but only one ideal point ∞U.
Ideal line
Any plane α = ab, in the space ∞E3, will be extended by the set of ideal points on all lines in the plane ∞A ∈ a , ∞B ∈ b,… , by the ideal line ∞u = ∞A∞B. All planes in the pencil of planes in the space ∞E3 will be extended by the same line. The ideal line is a common line of all planes in the set of planes that are parallel to one another α ׀׀ β ׀׀ γ ׀׀ δ….
5

α β γ δ
∞u
α a b ∞A
∞B
An ideal plane ∞ρ is a set of all ideal points an ideal lines in the space ∞E3.
CARTESIAN COORDINATE SYSTEM
In the Euclidean space a Cartesian coordinate system Oxyz is present. Coordinate axes x, y, z are lines (with the given unit segments) meeting at right angles in the common point – origin O. A plane determined by the x, y coordinate axes is the coordinate plane π, the one determined by the y, z coordinate axes is the coordinate plane ν and the one determined by the x, z coordinate axes is the coordinate plane μ. Planes π, ν, μ are perpendicular to each other and share only one common point O.
x y
z
O
xAyA
zA
Aν
π
μ
B
xByB
zB
Any arbitrary point in the space A ∈ ∞E3 can be attached a uniquely ordered triple of real numbers, which determine the oriented distances of the point to the coordinate planes μ, ν, π, respectively. They are denoted as Cartesian coordinates of the point, A = ( xA, yA, zA ). The opposite is also true: there exists one and only one point in the space such, that an arbitrary ordered triple of real numbers ( xB, yB, zB ) can determines the distances between this point and the μ, ν, π coordinate planes equalling to numbers xB, yB, zB respectively.
PLANAR FIGURES
Conic sections
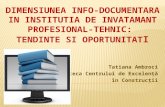
Conic section (or just conic) is a curve formed at the intersection of a cone (more precisely, a circular conical surface) and a plane. A conic section is, therefore, a restriction of a quadric surface to a plane.
6

circle ellipse parabola hyperbola
The three types of conics are the ellipse, hyperbola and parabola. The circle can be considered as a fourth type (as it was by Apollonius) or as a kind of ellipse. The circle and the ellipse are formed when the intersection of cone and plane is a closed curve. The circle is obtained when the intersecting plane is parallel to the plane of the generating circle of the cone. If the cutting plane is exactly parallel to one of the generating lines of the cone, then the conical part is unbounded and is formed as a parabola. In the remaining case, the figure is a hyperbola. Here the plane will intersect both halves (nappes) of the cone, producing two separate unbounded curves (of which one is often ignored).
There arise multiple degenerated cases, when a plane passes through the apex of the cone. The intersection figure, then can be:
a straight line (when the plane is tangential to the surface of the cone); a point (when the angle between the plane and the axis of the cone is greater than tangential); a pair of intersection lines (when the angle is smaller).
Where the cone is a cylinder (with vertex at infinity), cylindric intersections are obtained. Although these yield mostly ellipses (or circles) as normal, a degenerated case of two parallel lines, known as a ribbon, can also be produced.
ELLIPSE
1F 2F
M M
M An ellipse is the set of points in a plane such that the sum of the distances to two fixed points, 1F and 2F, is constant and equal 2a.The two points are called the foci.
7

Sa b e
D
A B
C
1F 2F
The shape of an ellipse can be expressed by a number called the eccentricity of the ellipse, conventionally denoted by e. Eccentricity is a non-negative number less than a, and greater than, or equal to 0. It is the value of the constant ratio of the distance between a point on an ellipse and a focus to that from the corresponding directrix. The eccentricity of 0 implies that the two foci occupy the same point and that the ellipse is a circle. Parameter a is the semimajor axis, parameter b is known as the semiminor axis of the ellipse. Points A, B are the major vertices, points C, D the minor vertices, point S the centre of the ellipse.
Point construsction of an ellipse determined by vertices A, B and foci 1F, 2F
A
D
B
C
S1F 2F1
M 1k
2k
This method is obvious from the definition of the ellipse. 1. Let us choose an arbitrary interior point 1 at inside of the line segment FF 21 . Then we
can write:⎟ A1⎟+⎟ 1B⎟ = ⎟ AB ⎟ = 2a. 2. Now we have two line segments that sum of their sizes is 2a. 3. M is the intersection point of the circle 1k = ( 1F;⎪A1⎪) and circle 2k = ( 2F;⎪1B⎪),
M = 1k ∩ 2k.
Construction of an ellipse by using the hyperosculating circles
S
D
A B1S
2S
C
2k1k
I
p
Hyperosculating circle is a circle osculating in the vertex of an ellipse.
8

Let CIBS be the oblong and CB its diagonal not passing through the centre S. The intersection point of the line p perpendicular to the diagonal CB passes through the point I (I ∈ p and p ⊥ CB) and the major axis AB is 1S, minor axis CD is 2S, 1S = p ∩ AB and 2S = p ∩ CD. Circles 1k = (1S; ⎪1SB⎪) and 2k = (2S; ⎪2SC⎪) are the hyperosculating circles.
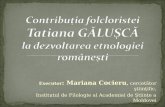
PARABOLA
M
F
M′
f
p
A parabola is the set of the points in a plane that are equidistant from a fixed point F – focus and a fixed line f – directrix ( MfMF = ). The distance between focus F and directrix f is
p – focal parameter ( Ff=p ). Point A – vertex as a midpoint of the distance between the focus F and the directrix f that lies on the parabola. The line passing through the focus perpendicular to the directrix is called the axis of the parabola o. Line tA is tangent to the parabola in the vertex A and it is perpendicular to the parabola axis.
Point construction of the parabola determined by focus F and directrix f
p
1 A F
f
k
1k
o
tA M
p
q d
This method is obvious from the definition of the parabola. Let o be a line perpendicular to the directrix f passing through the focus F. Let q be a line parallel to directrix and passing through an arbitrary point 1 on axis o. The distance between lines q and f is the radius of the circle 1k with its cenre F ( ( ) qfF,k1 == dd , ). Point M as a point on the parabola, is the
intersection point of the line q and the circle 1k ( kqM 1∩= ).
9

Circle k is a hyperosculating circle and its radius is equal to the focal parameter p of the parabola, p = ⎪ Ff ⎪.
HYPERBOLA
1F 2F
M
M´
A hyperbola is the set of the points in a plane where the difference of the distances between the two points 1F, 2F called the foci is constant and equal to 2a. The marking of the elements of hyperbola is the same as applied in the ellipse. Eccentricity is always greater than the semimajor axis, e > a.
Point construction of the hyperbola determined by vertice A, B and foci 1F, 2F
A B
C
D
S 1F 2F1S 1 2 3
M1k
2k
k
a
b
e
x y This method is obvious from the definition of the hyperbola. 1. Let us choose an arbitrary exterior point 1 of the line segment FF 21 . Then we can write:
⎟⎟ A1 ⎟ – ⎟ 1B ⎟⎟ = ⎟ AB ⎟ = 2a. 2. Now, we have two line segments with difference of their sizes equalling 2a. 3. Point M = 1k ∩ 2k, when circle 1k = ( 1F;⎪A1⎪) and circle 2k = ( 2F;⎪1B⎪). Lines x, y are the asymptotes of the hyperbola, they are its tangents at infinity. The centre of the hyperosculating circle 1S is a point on the major axis of the hyperbola and is constructed as illustrated in Figure.
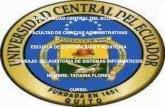
POLYGONS
In geometry a polygon is a plane figure bounded by a closed path or circuit, and composed of a finite sequence of straight line segments (i.e., by a closed polygonal chain) called its edges or sides. The points where they meet are termed as the polygon's vertices or corners. The
10

interior of the polygon is called the body. It is a two – dimensional example of a more general polytope extending in any number of dimensions.
S
A
a
B C
120°
S
A
a
B
C
D90°
S
A
aB
C D
E 72°
S
A
a B
C
D
E
F60°
equilateral triangle Square regular pentagon regular hexagon n = 3 n = 4 n = 5 n = 6
A regular polygon can be equiangular (all angles are congruent) and equilateral (all ides have the same length). Polygon is considered regular if it is both cyclic (all corners lie on a single circle) and equilateral (all edges are of the same length). Polygons are primarily classified by the number of sides n. Regular polygons for n = 3, 4, 5, 6 are displayed in Figure. Vertices A, B, C…. of regular polygon are located on the circle and centre S of this circle is also the centre of the polygon. The length of a polygon side is marked by letter a. Regular polygons are constructed as shown in Figure.
Examples of self-evalution
1. Construct an ellipse determined by its major vertices A, B and foci 1F, 2F by using the pointing construction.
2. Construct an ellipse determined by its major vertices A, B and minor vertices C, D by using the hyperosculating circles.
3. Construct the hyperbola determined by its major vertices A, B and foci 1F, 2F by using the pointing construction. Construct also its hyperosculating circles and asymptotes.
4. Construct the parabola determined by its focus F and directrix f by using the pointing construction. Construct also its hyperosculating circle.
5. Construct the regular polygon with n = 3,4,5,6 sides determined by its centre S and one vertex A.
11

GEOMETRIC TRANSFORMATIONS OF THE EUCLIDEAN SPACE
Mission
In Descriptive geometry we often use the view plane to plane. In this chapter there are described two such views: perspective collineation and axial affinity. There are also described the basic principles of these views in the space and also in case where the corresponding planar arrays are collinear, thus lying in the same plane.
Aims
1. Know the basic principles of perspective collineation and axial affiniy and unambiguously choose the adequate viewing of the plane.
2. Know to display an arbitrary regular polygon in both transformations.
Based on a given rule, regular transformation is a one-to-one mapping of the set M on the set M′, in which any point, line in the set M (original A ∈ M, a ⊂ M) is associated only with one element of the set M′ (view – image A′ ∈ M′, a′ ⊂ M′).
a a'A A'B
B'M M' b
b'
The following relations are valid: Two different points ( lines ) from the set M are mapped to the two different points ( lines ) in the set M′.
Two different points ( lines ) from the set M′ are images of two different points ( lines ) in the set M.
If the two sets M, M′ are geometric spaces with points and lines as elements, regular transformations defined on the sets of points and lines in these spaces are termed as geometric transformations.
If M = M′, the geometric transformation in the space accurs. The image of a geometric figure in a given geometric transformation is a set of images of all points of the figure. Geometric figures in the space can be mapped to other geometric figures of the same space. The properties of geometric figures, that are preserved under the given geometric transformation, are called invariant properties of the given transformation. Incidence in geometric transformations is preserved as an invariant property. Figures, that are mapped to one another, are called invariant figures. If all points of the figure are invariant under the given transformation, the figure is called point invariant. Geometric transformation will be denoted as linear, if it satisfies the followingtheorem: the image of a line is a line and the image of a plane is a plane.
EUCLIDEAN ( METRIC ) TRANSFORMATIONS
12

A set of Euclidean ( metric ) transformations called congruences is defined on the set of points in the Euclidean space. Incidence and metric ( the length of line segments ) are the invariants of the metric transformations.
A
A′
P
A
A′
P o
A
A´
S
A
A'
B
B'
A A′
P
o
These are: identity, symmetry – reflection in a plane, symmetry – reflection in a line, symmetry – reflection in a point, revolution about an axis, translation, reflection translated in a plane, reflection translated in a line, reflection revolved in a plane.
Congruences are sets of Euclidean (metric) transformations defined on a set of points in the Euclidean space. Incidence and metric (the length of line segments) are the invariants of the metric transformations, changing only the position of the figure in the space. Some of them are displayed in figure above.
Affine transformations of the space
Affine transformations do not preserve the size of line segments and angles as invariant. Special subset of affine transformations form similarities, preserving the size of angles as invariant. Any Euclidean transformation is considered as an affine transformation.
Projective transformations of the space
Projective transformation of the extended Euclidean space of any linear geometric transformation of the space is called collineation. In addition to the incidence, collinear transformations preserve invariant the ratio of four points on a line. All Euclidean and affine transformations are collineations of special properties and invariant elements.
CENTRAL COLLINEATION OF THE PLANE ρ ON THE PLANE ρ′
Projective transformation, with the set of invariant points in – the point invariant real line, axis of collineation o = ρ ∩ ρ′ – one real point in the space, as the centre of collineation S, not located in any of the
planes ρ and ρ′ – set of invariant lines (not point invariant) passing through the common point S
is termed as central collineation.
13

ρ
ρ'
S
o
A
BC
D
A'
B'a'
ab
1=1' 2=2' 3=3' 4=4'
D'C'
b'
It is determined unambiguously by the axis o, a pair of corresponding points A, A′ (ρ = oA, ρ′ = oA′) and the centre S located on the line determined by these points, S ∈ AA′.
The image of an arbitrary point B in the plane ρ is point B′ in plane ρ′, which can be determined on the basis of the following rules:
1. All pairs of corresponding points within the central collineation form lines passing through the centre of collineation S, AA′ ∩ BB′ ∩... = S, B′ ∈ BS.
2. Any line in the plane ρ intersecting the axis of collineation o in its invariant point, is also formed on the collinear image of the line. If the image of the line a in the plane ρ is the line a′ in the plane ρ′, then a ∩ a′ = 1 = 1′, 1 = 1′∈ o. Let a = AB, the image a′ of this line must be passing through the point 1=1′ on the axis of collineation.
3. With respect to the invariant incidence, the line a′ = A′B′ is the image of the line a = AB and determined by its two points A′ and 1 = 1′. Then B′ = BS ∩ a′.
Central collineation in the Extended Euclidean plane can be obtained by projecting the two collinearly corresponding planes ρ and ρ′ and the centre of the collineation S on the plane, while none of the planes appears in the edge view, and the image of the point S is a real point not located on the image of the axis of collineation o.
S
A
A′
B
B′ a′
a
o1=1′
It is determined by the axis of collineation in the image of the intersection line o = ρ ∩ ρ′, by the centre in the image of the centre of collineation S not located on the axis o, and a pair of corresponding points in the images of points A ∈ ρ, A′ ∈ ρ′, S ∈ AA′ K(S,o,A→A′).
14

Image B' of an arbitrary point B in the plane can be determined by the algorithm described above.
Vanishing points, vanishing lines
Two lines of the same direction are mapped to the two intersecting lines (a ׀׀ b → a′ × b′). Therefore no parallelism is observed.
A
A′
S
o
uv′
a
a′ U
V′
∞V
∞V
∞U′
1=1′
∞U′
Central collineation is a linear transformation when ideal points in the Extended Euclidean plane are mapped to real points. The image of an ideal point ∞U′ is a vanishing point
u U∈ and ∞U′ ∈ a′ → U ∈ a. The image of an ideal point ∞V is a vanishing point v V ′∈′ , aVaV ′∈′→∈∞ . Vanishing lines u, v′ are parallel to the axis of collineation –
u ׀׀ v′ ׀׀ o.
A
S
o1=1′ 2=2′
U′ V′ v′
3=3′4=4′
C
D
A' B'C'
D'
B Two lines of the same direction are mapped to the two intersecting lines, while their common invariant ideal point is mapped to the real intersection point of the images of lines. Lines in the direction of the axis of collineation are mapped to the lines in the same direction of the axis of collineation. The image of an ideal line in the plane is a real line v′ in the direction of the axis of collineation and is termed as a vanishing line. The centre of the geometric figure is not mapped to the centre of the image of the figure. Square in the collineation K(S,o,A→A′) is mapped as a nonregular quadrilateral.
AXIAL AFFINITY OF THE PLANE ρ ON THE PLANE ρ′
Affine transformation, with the invariant figures in the – axis of affinity – set of all invariant points of the transformation o = ρ ∩ ρ′ – direction of affinity s ⊄ ρ, s ⊄ ρ′
15

– invariant (but not point invariant) pencil of lines is termed as the axial affinity.
ρ
ρ'
o
A
BC
D
A'
B'C'
D'
a'b'
ab
1=1' 2=2'
3=3'4=4'
sA sB sD sC
sA
s
The image of an arbitrary point A ∈ ρ is a point A′ ∈ ρ′, which can be determined based on the following rules:
1. Point A′ is located on the line sA from the pencil of lines in the direction of affinity s passing through the point A, A′ ∈ sA ׀׀ s. All lines passing through the pairs of corresponding points are located in the pencil of lines determined by the direction s, AA′ ׀׀ BB′ ׀׀ CC′ ׀׀ ... ׀׀ s.
2. Any line in the plane ρ intersecting the axis of affinity o in its invariant point, must be located also in its affine image.
If the image of the line a is the line a′ ∈ ρ′, then a ∩ a′= 1 = 1′, where 1 = 1′ ∈ o. Let a = AB, the image a′ is passing through the point 1 = 1′ on the axis of affinity. Lines in the direction of this axis of affinity have ideal invariant points. 3. Axial affinity keeps invariant the incidence of points and lines. The line a′ = A′B′ is the image of a line a = AB and is determined by its two different points A′ and 1 = 1′. Similarly, affine image of point B is point B′ = a′ ∩ sB.
A
A'
B
B' a'
a
o1=1'
s sB
Projecting the pair of affinely corresponding planes ρ, ρ′ and the direction of affinity s on the plane, while none of the planes ρ, ρ′ appears in the edge view as a line, and images of the direction s = AA′ and the axis of affinity o are two intersecting lines, an axial affinity in the extended Euclidean space ∞E2 can be obtained.
It is determined by the invariant axis of affinity (image of the intersection line o = ρ ∩ ρ′) and a pair of corresponding points (images of points A ∈ ρ, A′ ∈ ρ′) in the direction of affinity (image s = AA′).
16

Based on the described algorithm, the affine image B′ of an arbitrary point B in the plane can be constructed as follows:.
The two parallel lines are mapped to two parallel lines, the intersecting lines are mapped to the intersecting lines, while the intersection point of the line images is the image of the intersection point of the original lines. The centre of a geometric figure is mapped to the centre of the image of the figure. The size of angles and length of line segments are not invariant in axial affinity.
On the lines in the same direction, the same scaling ratio is applied, and the line segments are shortened or lengthened by the same ratio ( | AD | = | BC |, | A′D′ | = | B′C′ | ). Line segment length is invariant only on lines in the direction of the axis of affinity (| AC | = | A′C′ |).
A
o 1=1′ 2=2′3=3′ 4=4′
C
D
A′
B′
C′D′
s a′b′
ba
B
Affine image of a circle is an ellipse (or a circle, in a particular case).
Let the axial affinity be determined by the axis o and pair of correspondent points O and O´.
o
s
O
O′
K
N L
M
K′
N′ L′
M′
1=1′ 2=2′
BASIC TYPES OF PROJECTION TO THE PLANE
Special mapping of the space to the arbitrary chosen plane (image plane) is termed as projection. Two different basic types of projection to the plane can be distinguished, central and parallel.
17

CENTRAL PROJECTION
Let S be a real point – the centre of projection, not located in a chosen plane π –the image plane. The distance between the centre of projection and the image plane is termed as the characteristic distance of the central projection | Sπ | = d.
A
B
A' B' p'
p
π
P
S
d
The image of an arbitrary point A ≠ S is point A′ ∈ π, which is the intersection point of the line AS – the projecting line, passing through the point A, centre of projection S and image plane π, A′ = SA ∩ π.
PARALLEL PROJECTION
Parallel projection is a special case of the central projection when the centre S is the ideal point ∞S. Let s be a given direction – the direction of the projection. (a pencil of lines in the space passing through the same ideal point in the direction s). Let the direction s intersects an arbitrary chosen plane – the image plane π in a real point.
AB
A' B'p'
p
π P
∞S
sA
∞S
χ
The image of an arbitrary point A is the point A′ ∈ π, which is the intersection point of the image plane and the line sA, A ∈ sA in the direction s, with the projection line passing through the point A, A′ = sA ∩ π. All points on any projection line are mapped to the same point in the image plane, i.e. to the intersection point
The image of a geometric figure U is projected as a figure U′ in the image plane, which can be constructed from the images of all points on the figure U.
The image of a line, which is not a projection line, is a line. The image of a projection line is a point. The invariant intersection point of a line and the image plane is termed as the trace of the line P. The set of all projection lines of points located on one line forms a line projection plane χ. The image a′ of a line a is the intersection line of the projection plane χ and the image plane π.
The image of a plane ρ, which is not a projection plane, is the entire image plane. The image of a projection plane is a line. The intersection line of a plane ρ and the image plane is a trace of the plane pρ. The trace of the plane is a set of all traces of lines located in the plane. Any line located in the plane sharing a common ideal point with the trace of the plane, is called the principal line hρ in the plane (with the line trace at infinity).
18

A'π
∞S
ρ ρ hρ
hρ' sρ'
sρ
A
P
pρ
φ
The image of a principal line in the plane hρ' is a line parallel to the trace of the plane pρ. Any line in the plane perpendicular to the trace of the plane (and all principal lines in the same direction) is called the slope line sρ in the plane. The acute angle ϕ, formed by the slope line to the image plane, is formed as the slope of the plane to the image plane.
The most frequently used types of projection methods are: dimensional projection, orthogonal projection on two orthogonal image planes – Monge´s method, axonometry, central projection and linear perspective.
Examples of self-evalution
1. Perspetive collineation in the plane is determined by the axis o, centre S and a pair of corresponding points O→O′ . When the point A is known, there construct: a) Square with centre O and vertex A and its collinear image, b) Regular pentagon with centre O and vertex A and its collinear image, c) Regular hexagon with centre O and vertex A and its collinear image.
2. Axial affinity in the plane is determined by the axis o and a pair of corresponding points O→O′ . When the point A is known, there construct: a) Square with centre O and vertex A and its afine image, b) Regular pentagon with centre O and vertex A and its afine image, c) Regular hexagon with centre O and vertex A and its afine image.
19

MONGE´S METHOD
Mission
Teach students the most frequently used projective method – Monge´s method, which is suitable for display geometric figures in the case we need to keep its size or find its size from its views. In the chapter there is presented the viewing of basic geometric figures and simple objects. There are solved any basic exercises as the construction of the intersection of line and plane, revolution of the plane to the image plane.
Aims
1. Be able to construct the image of a point, line and plane. 2. Be able to find the form and size of the planar objects. 3. Be able to construct the variou views ( ground view, frontal view, side view, bottom
view, upper view) of the solid.
Monge´s method is an orthographic projection (mapping) to the two perpendicular image planes: ground plane π = xy, frontal plane ν = xz.
Any point A in the space can be attached a pair of related views (A1, A2), where A1 is the orthographic view in the ground plane π – the ground view – 1st image of the point A, and A2 is the orthographic view in the frontal plane ν – the front view – 2nd image of the point A.
x1,2
A2
A1
+z2= –y1
+y1= –z2
zA
O
xAyA
The image of the coordinate axis x is denoted as the reference line x1,2. Ground view and front view are related views in the direction perpendicular to the reference line. Ground view A1 of the point A is determined by Cartesian coordinates xA and yA, while the front view A2 is determined by the coordinates xA and zA.
A
A1
A1
A2
O
x
y
z
+π
-π
+ν
-ν
20

PROBLEMS ON SUPERPOSITION OF SPACE FIGURES
View of a point
+π -π
+ν
-ν
I II
III IV
AB
C D
O
Perpendicular image planes π and ν divide the space into four quadrants. Coordinates of points located in the separate quadrants satisfy the following inequalities:
I. yA > 0, zA > 0
II. yB < 0, zB > 0
III. yC < 0, zC < 0
IV. yD > 0, zD < 0
A1
A2
x1,2
B1 C1
D1
B2
C2 D2 Related views of the points A, B, C, D are illustrated in figure.
P=P1
P2
N1
N=N2
π
ν
x
P1
P2
N1
N2
x1,2
Front view of the ground plane and ground view of the frontal plane are in the reference line x1,2. Any point located in the ground plane, P ∈ π, has got the front view on the reference line x1,2 (| Pπ | = 0), and any point located in the frontal plane, N ∈ ν, has got the ground view on the reference line x1,2 (| Nν | = 0), too.
View of a line
21

A
A1
A2
P=P1
P2
N1
N=N2
a1
a2
a
π
ν
x
A1
A2
x1,2
B1
N1
P1
B2
N2
P2
a1
a2
View of a line is the set of views of all points located on the line. If a point is located on a line, views of the point are also located on the corresponding views of the line as: A ∈ a, then A1 ∈ a1 and A2 ∈ a2.
Intersection points of the line and the image planes π, ν are traces of the line, points P, N.
A1
A2
x1,2
P1
P2
a1
a2
∞N1
∞N2
A1
A2
x1,2 N1
N2
a1
a2
∞P1
∞P2
A line has got an ideal trace, if it is in the direction of the image plane:
a ׀׀ ν, the trace ∞N is in the frontal plane,
a ׀׀ π, the trace ∞P is in ground plane.
If a point A is located on a line a, views A1, A2 of this point are located on the corresponding views of the line: A1 ∈ a1 , A2 ∈ a2 and line A1A2 ⊥ x1,2.
b1
P2 x1,2
N1
b2=N2
a1= P1
a2
A line perpendicular to the image plane is projected to the point
a ⊥ π, a ׀׀ z, a ∩ π = P, b ⊥ ν, b ׀׀ y, b ∩ ν = N.
x1,2
a1
a2
22

A line parallel with both image planes is projected to the lines a1 ׀׀ a2 ׀׀ x1,2.
Superposition of two lines
Pa Pb
a b
a1
b1 π
b1
x1,2
b2
a1
a2
Parallel lines, which are not in the direction of the projection, are projected to lines in the same direction in all views.
Pa
Pb
a b
a1 b1
π
R
R1
b1
x1,2
b2
a1
a2
R2
R1
The intersection point R of two intersecting lines a × b mappes into the intersection point of the separate views of the lines a, b. Line R1R2 ⊥ x1,2 is perpendicular to the reference line.
Pa
Pb
a b
a1 b1
π
R
R1=Q1
Q
b1
x1,2
b2
a1
a2
M2=N2
N1
M1
R1=Q1
Q2
R2
Skew lines have no common point. The intersection points of the views of skew lines are views of two different points located on different lines:
a1 ∩ b1 = R1 = Q1, R2 ∈ a2, Q2 ∈ b2, a2 ∩ b2 = M2 = N2, M1 ∈ a1, N1 ∈ b1.
Visibility of skew lines can be solved with respect to these points. Ground view Q1 is visible, while ground view R1 is hidden, point Q on the line b has got a greater coordinate z than the point R on line a. The front view M2 is visible, while N2 is hidden. Point M on the line a has got a greater coordinate y than point N on line b.
View of a plane
A plane is usually determined by the views of its traces, intersection lines of the plane and image planes. Intersection points of the plane ρ and coordinate axes are intersection points of the plane traces in the image planes:
ρ ∩ π = pρ , ρ ∩ ν = nρ, ρ ∩ x = pρ ∩ nρ = X, ρ ∩ y = Y, ρ ∩ z = Z.
23

X O
π
ν
ρ
pρ
nρ
Y
Z
x
y
z
xρ
yρ
zρ
x1,2
ρ1p
O
y1
z2
xρyρ
zρ X
Y
Z
ρ2n
x1,2
1ρ1 ρp =
O
y1
z2 ρ2n
x1,2
ρ1p
O
y1
z2
2ρ2 ρn =
A plane perpendicular to the image plane appears in the side view, it is projected to a line in the image plane
ρ ⊥ π, ρ ׀׀ z, 1ρ1 ρp = , 1,2
ρ2 xn ⊥ ρ ⊥ ν, ρ ׀׀ y, 2
ρ2 ρn = , 1,2
ρ1 xp ⊥
x1,2 ρ1p
O
y1
z2 ρ2n
A plane parallel to axis x (parallel with both image planes) has its plane traces parallel to x1,2.
X O
π
ν
ρ
pρ
nρ
Y x
y
z
xρ
yρ
zρ
Z
x1,2
ρ1p
O
y1
z2ρ2n
24

Plane in left figure has coordinate zρ < 0, and plane in right figure has coordinate yρ < 0 (spanded planes).
Exercise 1: Find the plane traces of plane ρ determined by two parallel lines a ׀׀ b.
x1,2
ρ1p
ρ2n
P1
N1 1N ′
N2
2N ′
P'2
1P ′
P2
a2 b2
a1 b1
Solution: Let two parallel lines a, b be determined by their ground views a1 ׀׀ b1 and front views a2 ׀׀ b2. Their traces are P, N and P′, N′. The traces of the plane ρ = ab are then determined by their line traces, 11
ρ1 PPp ′= and 22
ρ2 NNn ′= .
Exercise 2: Find the traces of plane ρ determined by the three different points A, B, C.
x1,2
A1
B1 C1
A2 B2
C2
x1,2
ρ1p
A1
ρ2n
B1 C1
P1
N1
1N′
A2B2
C2
N2
2N′
2P′
1P′
Solution: The view of a plane ρ is determined also by the views of its three different points in the plane A, B, C. The traces of the lines AB, BC, AC determine the traces of the plane ρ = ABC, ρ
1p = 11PP ′ , ρ2n = 22NN ′ .
Point and line located in a plane
25

A
A1
N
P π
ν
ρ
pρ
nρ
a P2 N1
a1
a2
A2
x1,2
ρ1p
ρ2n
P1
N1
N2
P2
a2
a1
A1
A2
The point A is located in the plane ρ, when it is located on the line a in the plane ρ. The line a is located in the plane ρ, when the line traces P, N are located on the traces pρ, nρ of the plane ρ.
AN
Pπ
ν ρ
pρ
nρ2hρ
ρ1
2hρ1
1h
1hρ
A1
ρ2
1h
ρ2
2h
Principal lines in the plane form two frames of lines in a special direction:
x1,2
ρ1p
ρ2n
N1
N2 ρ2
1h
ρ1
1h
1hρ ׀׀ π, 1hρ ⊂ ρ, 1st frame, horizontal lines
x1,2
ρ1p
ρ2n
P1
P2
ρ2
2h
ρ1
2 h
2hρ ׀׀ ν, 2hρ ⊂ ρ, 2nd frame, frontal lines
26

Exercise 3: Find the front view A2 of the point A located in the plane ρ, A ∈ ρ, when ground view A1 is determined and plane ρ is determined by its traces pρ, nρ
x1,2
ρ1p
ρ2n
N1
N2 ρ2
1h
ρ1
1h A1
A2
Solution: Let us construct the principal line of the 1st frame passing through the point A1 ∈ ρ
11 h ρ ׀׀
1p , than ρ2
1 h x1,2 and A2 ∈ ρ ׀׀ 2
1 h , where A1A2 ⊥ x1,2.
Slope lines in the plane also form two frames of lines:
x1,2
ρ1p
N1
N2
ρ2
1h
ρ1
1h ρ1
1s
P2
P1
(N) α
ρ2n ρ
21s
slope line of the 1st frame
Line ρ1
1 s is mapped to the line perpendicular to the trace ρ1p (view of the right angle with one
arm pρ in π, the other arm ρ2
1 s is not perpendicular to plane trace nρ). The front view ρ2
2 s can be determined by its traces located on the plane traces of ρ, 1sρ ⊥ pρ, 1sρ ⊥ 1hρ
x1,2
ρ1p
P1
P2
ρ2
2h
ρ1
2h
ρ2
2sN2
N1
ρ1
2s
(P) β
ρ2n
slope line of the 2nd frame
27

By the Monge´s method, the front view ρ2
2 s is perpendicular to the plane trace ρ2n . Τhe slope
lines of the 1st frame determine the angle α between plane ρ and ground image plane π, and the slope lines of the 2nd frame determine the angle β between plane ρ and frontal image plane ν, 2sρ ⊥ nρ, 2sρ ⊥ 2hρ
Superposition of two planes
π
ν
ρ
pρ
nρ
σ
nσ
pσ
σ2
2hρ2
2h
ρ2h
σ2h
P P'
P2 P'2
σ1
2ρ1
2 hh =
x1,2
ρ1p
ρ2n
P1
P2
ρ2
2h
σ1
2ρ1
2 hh = P'1
σ2nσ
22h
σ1p
P'2
Let two parallel planes ρ ׀׀ σ be given. To any line located in one of the planes, there exists a parallel line located in the other plane. Line traces pρ, pσ are located in the same image plane π (nρ, nσ ⊂ ν and must be in the same direction. Traces of the parallel planes ρ ׀׀ σ are in the same direction (they are parallel) – pρ ׀׀ pσ, nρ ׀׀ nσ.
π
ν
ρ
pρ
nρ
σ
nσ
pσP
N
P2
l1
l2
l N1
x1,2
ρ1p
ρ2n
P1
P2
σ2n
σ1p
N1
N2
l2
l1 Intersecting planes have a common real intersection line – pierce line l determined by its traces, which are intersection points of the plane traces. Views pρ and pσ are located in π and they intersect at the real point P – trace of the pierce line l in the ground image plane, pρ ∩ pσ = P, and similarly nρ ∩ nσ = N. This two points are located on the line l, l = PN.
Superposition of a line and a plane
x1,2
ρ1p
ρ2n
P1
P2 N1
N2
a2=l2
l1
a1
P′1
N′1
N′2
28

Let us have a plane ρ and let a line a be parallel to it. There exists a line l located in the plane ρ and parallel to the given line a, which called a cover line.
x1,2
ρ1p
ρ2n
P1
P2 N1
N2 a2=l2
l1
a1
R2
R1
Let us have a plane ρ and let a line a intersect it. There exists a line l located in the plane ρ and intersects line a in the point R (which is the intersection point of the given line a and the given plane ρ). Let one view of the line coincide with the view of the line l located in the given plane ρ (a2 = l2 − cover line). The other view of the line l can be determined by the traces of this line.
METRIC PROBLEMS IN MONGE´S METHOD
To reconstruct figures from their views, or to find a view of the figure determined by its dimensions and metric properties of its elements, are tasks realised by means of basic constructions covering the basic problems on metric properties. There can be distingueshed two basic types of metric problems:
– problems on a size of a line segment, – problems on a size of an angle.
Size of a line segment – lenght
The orthographic view of a line segment is a line segment with the length shorter or equal to the length of the original line segment. In the orthogonal projection, line segments appear in the true size, when located on lines parallel to the image plane. The size of a line segment located on a line in a general position, with respect to the image plane, can be determined by means of several methods of construction.
Lowering the projecting plane
π
A
a
B
A1 B1
(A)
(B)(a)
a1 χa
φ φ
x1,2
κ1p
λ2n
P1
P2
N1
N2
a2= κ2n
A2
A1
B1
a1= λ1p (a)
(a)
(A)
(A)
(B)
(B)
zA
zA
yB
yB
29

Line segment (as a part of a line) is projected in the projecting plane perpendicular to the image plane, AB ⊂ κ, κ ⊥ π, or AB ⊂ λ, λ ⊥ ν. Revolution of the projecting plane by 90° about the intersection line with the image plane (trace of plane) into the image plane is the lowering of the projecting plane. Projecting lines of the points A and B are lowered into the lines perpendicular to the edge view of the plane and the lowered points (A) and (B) are located on them, in the distances equal to their distances from the image plane, coordinates zA, zB
in lowering to the π, and yA, yB in lowering to the image plane ν. Lowered figures will
be drawn in dash lines and denoted by the names in the brackets. The true size of a line segment appears in the lowered position, | AB | = | (A)(B) |.
x1,2
a2 A2
A1
B1=(B)
a1
(a)
(a)
(A)
(A)
B2=(B)
zA-zB
yA- yB
The plane can be lowered also to the planes parallel to the image planes, π′ ׀׀ π or ν′ ׀׀ ν. The distance to which the points will be lowered is, in this case, equal to the difference of the due coordinates of the point and the plane π′ ( yA – yB ) or ν′ ( zA – zB ), | AB | = | (A)(B) |, B1 = (B) or B2 = (B).
Revolution of a plane
The length of a line segment not appearing in the true size can be determined also by revolution of the plane into the image plane.
1. Axis of revolution is the intersection line of the plane being revolved and the plane to which it is revolved (principal line or the trace of the revolved plane).
2. A point revolves on a circle located in the plane of revolution perpendicular to the axis of revolution.
3. Centre of the circle of revolution, centre of revolution, is located on the axis of revolution.
4. Radius of revolution of the point is the distance of the the point and the axis of revolution.
Revolution a plane ρ to the ground plane π
30

Ao oA′ A1
P
kA
ρ1
1 s
pρ
ρ
χA
π
1sρ
A
x1,2
ρ1p
N1
N2 ρ2
1h
ρ1
1h ρ1
1s P1
A1
A2
Ao
(A)
(kA)
( )ρ1s rA
oA′
ρ2n
Let plane ρ is determined by traces ρ = (pρ, nρ), point A locates in the plane ρ, A ∈ ρ. Line o = π ∩ ρ = pρ is axis of revolution of the point A. Let us use the plane of revolution χA of the point A perpendicular to the planes π and ρ, A ∈ χA ⊥ ρ, χA ⊥ π. Then, point P is the centre of revolution P = χA ∩ o, where P is the trace of the slope line 1sρ = χA ∩ ρ. Τhe radius of the revolution is rA = ⎥ PA ⎥ = ⎥ P1(A) ⎥. Circle kA = ( P; rA ) is the circle of revolution of the point A. The two alternatives of the revolved point A will be intersection points of the circle of revolution and the 1st image of the slope line passing through the point A: { Ao, oA′ } = kA ∩ 1sρ.
Exercise 4: Find the true size of the triangle located in the plane determined by this triangleΔ ABC ⊂ ρ.
A1
A2
Ao
(A)
P1
N1
N2
ρ1
1h
ρ2
1h
ρ1
1s
1=1o
2=2o
rA
B1
B2
C1
C2
ρ1p
x1,2
Bo
Co
zA
zA
ρ2n
Solution: Let the triangle Δ ABC be determined by its ground view Δ A1B1C1, then its front view Δ A2B2C2 can be constructed by using the principal lines of the 1st frame. The true size of the triangle Δ ABC can be constructed by revolution of the plane ρ about the trace pρ into the ground image plane π. At first, it can be revolved the point A and then point Ao is obtained. The relation between Δ AoBoCo and Δ A1B1C1 is the one of orthogonal affinity with an axis o = ρ
1p and pair of corresponding points A1 → Ao.
31

AUXILIARY PROJECTING PLANE
A A2
A3
zA
zA
π
ν
x1,2
zA
A3
zA
λ
A1
In practical work, views of an objects are required to have in directions other than that can obtained using ground and frontal image planes. In fact, it happens quite often that the actual object cannot be adequately represented by ground and front views. Then we can use the additional side image plane – auxiliary projecting plane λ:
1. perpendicular to the image plane π,
2. perpendicular to the image plane ν,
3. perpendicular to both image planes π and ν – profile plane ( side plane )
Auxiliary view of a point
Let us mark the aditional view (auxiliary view) of the point A as A3.
A1
A2
A3
zA
zA
y1,3 = λ1
x1,2
1. auxiliary plane λ ⊥ π, y1,3 = λ ∩ π
A1
A2
A3
yA
yA
z2,3 = λ2
x1,2
2. auxiliary plane λ ⊥ ν, z2,3 = λ ∩ ν
A1
A2 A3
zA
z2,3 = λ2
x1,2
zA
yA
yA
32

3. plane λ ⊥ π ∧ λ ⊥ ν, z2,3 = λ ∩ ν A very important image plane is the one known as the profile plane, which is perpendicular to both image planes π and ν.
Auxiliary view of a plane
x1,2
σ1p
σ2n
P1 = P3
N1
N2
N3
zN
zN
σ3
y1,3
If an auxiliary plane is perpendicular to the ground image plane π and to the plane σ, λ ⊥ π ∧ λ ⊥ σ, then the 3rd view of the plane σ is the line σ3 = P3N3, where trace P lies on the plane trace pσ, P ∈ pσ and trace N lies on the plane trace nσ, N ∈ nσ. The reference line y1,3 between the ground image plane and the auxiliary plane λ is perpendicular to the trace pσ of the plane σ: y1,3 = π ∩ λ, y1,3 ⊥ σ
1p .
RELATED VIEWS OF A GEOMETRIC SOLID
A geometric solid is a bounded three–dimensional geometric figure: polyhedra, pyramid, prism, cylinder, cone, sphere,…Geometric solids are segments of prismatic, pyramidal, cylindrical or conical surface.
A pyramidal (or prismatic) surface is determined by the basic polygon (mostly a closed planar n–gon) and main vertex – apex, which is a real point V (or an ideal point ∞V – direction of all surface lines). A conical (or cylindrical) surface is determined by the basic curve (mostly a circle) and vertex, which is a real point V (or an ideal point ∞V – direction of all surface lines).
Solids are angular (prism, pyramid) or curved (cylinder, cone).
Angular solids
Labeling:
base – polygon (S, A), determined by centre S and one vertex A
S – centre of the base, S′ – centre of the top base, V – apex or main vertex
A, B...– vertices of the base, A′, B′,...– vertices of the top base,
side edges – AA′, BB′... or AV, BV..., basic edges – AB, BC,...
side faces – ABB′A′, BCC′B′,...or ABV, BCV,...
o – axis, o = SS′, o = SV, o ⊥ π ( regular solids ) or o × π ( oblique solids ),
33

v – hight of a regular solid
S S S S
S′ S′A´ A´
A A A A
V Vo
v v
π B B B B
B´ B´
a) b) c) d)
o o o
oblique prism, right prism, oblique pyramid, right pyramid Curved solids
Labeling:
base – circle k = (S,r), determined by centre S and radius r
S – centre of base, S′ – centre of top base, V – apex or vertex
o – axis, o = SS′, o = SV, o ⊥ π ( regular solids ) or o × π ( oblique solids ),
v – hight of a regular solid
S S
S′ S′
o o
v
πV
a) b) c) d)
r r S
Vo
S
V
o
r r
v
oblique circular cylinder, regular circular cylinder, oblique circular cone, regular circular cone
The view of a solid can be determined by views of the basic n-gon or basic curve and views of the line segments in the solid side edges (solid lines).
Exercise 5: Find the related views of the oblique (or regular) prism with its square base located in the ground image plane π and determined by its centre S and vertex A, (S, A), axis o = SS′ (or o ⊥ π, height v = | SS′ |).
34

A1
A2
S1
B1
C1
D1
1A′
1B′
1C′
1D′
1S′
2S′2A′
2C′
C2 S2
o2
o1
x1,2
2D′
Solution: The view of a solid can be determined by view of its square base located in the ground image plane π and the views of its line segments in the side edges of the solid. The ground view of the solid base is a square A1B1C1D1 in its true size and the frontal view of the square base is the line segment on the reference line A2C2 ⊂ x1,2. The ground view of the top base 1111 DCBA ′′′′ is identical to the ground view of the base A1B1C1D1, the frontal view of the top base is a line segment parallel to the reference line 22CA ′′ x1,2 with midpoint in the ׀׀centre of the top base S′. All views of the side edges are parallel to the views of solid axis o and are of the same size:
11AA ′ , 11BB ′ o1, 22 ׀׀ … AA ′ , 22BB ′ o2, 11AA ׀׀ … ′ = 11BB ′ = 11SS ′ , 22AA ′ = 22BB ′ = 22SS ′ .
The contours of both views of the solid are always visible, therefore, we draw them in full thick lines. In the groundview, the contour is a polygon 1111111 ADDCBBA ′′′ and in the front view, the contour is also a polygon (parallelogram) 22222 AACCA ′′ . The top base is higher, therefore, it is visible, while the basic edges, D1C1 and B1C1, are invisible so are drawn in thick dotted lines. The side edge 22DD ′ is also invisible because edge DD′ is closest to the frontal image plane ν.
The ground view of a regular square prism is a square A1B1C1D1 = 1111 DCBA ′′′′ and its front view is an oblong 22222 AACCA ′′ . The side edge 22DD ′ is invisible because edge DD′ is closest to the frontal image plane ν.
35

11 AA ′=
A2
11 SS ′=
11 BB ′=
11 DD ′=
2S′
C2 S2
o2
x1,2
B2 D2
11 CC ′=
2C′ 2A′ 2D′
Exercise 6: Find the related views of the oblique (or regular) pyramid with its square base located in the ground image plane π and determined by its centre S and vertex A, (S, A), with axis o = SV (or o ⊥ π, height v = | SV |).
A1
A2
S1
B1
C1
D1
V1
V2
C2 S2
o2
o1
x1,2
D2 B2
Solution: The related views of the pyramids are similar with those of the views of the prisms. The view of a solid can be determined by view of its square base located in the ground image plane π and the images of the line segments of its side edges. The ground view of the square base is a square A1B1C1D1 mapped in its true size, and the front view of it is the line segment A2C2 ⊂ x1,2. All views of the side edges are lines A1V1, B1V1, C1V1, D1V1 and A2V2, B2V2, C2V2, D2V2. The ground view of the prism has the contour of a polygon A1B1V1D1A1 and its front view has also the contours of a polygon (triangle) A2C2V2A2. The visibility of this solid is similar to that in the previous exercise.
The ground view of the regular square pyramid is a square A1B1C1D1 and the front view is a triangle A2C2V2A2. The side edge 22DD ′ is invisible because the edge DD′ is the one closest to the frontal image plane ν.
36

A1
A2
S1=V1
B1
C1
D1
V2
C2 S2
o2
x1,2
B2 D2
Exercise 7: Find the related views of the regular circular cone (cylinder), with a circle base located in the ground image plane π and determined by the cenre S, radius r and height v (S, r, v).
Solution: The ground view of the regular circular cone is a circle. The front view of the cone is an isosceles triangle with size of its hight v.
S1=V1
V2
S2 x1,2
o2
o2
S2
2S′
11 SS ′=
x1,2
The ground view of the regular circular cylinder is a circle. The front view of the cylinder is an oblong with size 2r × v.
AUXILIARY VIEW OF A GEOMETRIC SOLID
1st case the auxiliary plane λ is perpendicular to the frontal image plane ν
λ ⊥ ν, reference line z2,3 = λ2 = λ ∩ ν
37

A1
A2
S1=V1
B1
C1
D1
V2
C2 S2
o2
x1,2 B2 D2
o3
A3 B3
C3 D3
S3
V3
z2,3=λ2
1
yC
yC
s3
Aauxiliary view of the base is visible, because this projection of the pyramid is viewed from below. Construction of the point C3: C2C3 ⊥ z2,3 and | 1C3 | = yC
2nd case the auxiliary plane λ is perpendicular to the ground image plane π
λ ⊥ π, reference line y1,3 = λ1 = λ ∩ π
A1
A2
S1=V1
B1
C1
D1
V2
C2 S2
o2
x1,2
B2 D2
A3 B3
C3
D3
S3
V3
y1,3=λ1
o3
Construction of the point V3: V2V3 ⊥ y1,3 and | S3V3 | = zC = v = | S2V2 | . The auxiliary view of the base is a line segment, because this projection of the pyramid is viewed from side similarly to the frontview. The side edge C3V3 is invisible.
3rd case the auxiliary plane λ is perpendicular to both image planes
λ ⊥ π and λ ⊥ ν, reference line z2,3 = λ2 = λ ∩ ν
38

D1
A2
x1,2
D2
A1 S1=V1
B1
C1
V2
C2 S2
o2
B2
o3
A3 B3 C3 D3 S3
V3 z2,3=λ2
yCyC1
Construction of the point C3: C3 ∈ x1,2, | 1C3 | = yC
. The visibility of the pyramid is similar to visibility of the pyramid in previous figure.
D1
A2
x1,2
D2
C2
B2
A3
C3
z2,3=λ2
A1
B1
B3
C1
D3
Figure display the ground, front and profile (side) views of a composed solid. In this case, ground and front views are not sufficient for full visualization of this solid. In this picture, only some vertices of the solid are marked.
Examples of self-evalution
1. Find the form and size ot the quadrilateral ABCD, which lies in the plane ρ(6; 6,5; 5) and it is determined by ground images of the points A(1; 1,5; ?), B(-2,5; 1; ?), C(-5; 5; ?), D(-1; 6; ?).
2. Construct the related views of the right prism (pyramid)with pentagonal base located in the ground image plane π, determined by its centre S(0;4;0), vertice A(0;0,5;0) and hight v = 6. Construct its side view, bottom view and top view, where 3rd image plane is perpendicular to the front image plane.
3. Construct the related views of the oblique hexagonal prism determined by the centre of the base S(-5; 6; 0), vertex A(-6; 3,5; 0) and by the centre of the top base S´(2; 4; 8). Construct its side view, bottom view and top view, where 3rd image plane is perpendicular to the front image plane.
4. Construct the related views of the oblique pentagonal pyramid determined by the centre of the base S(3; 4; 0), vertex A(1; 15; 0) and apex V(-4; 7; 7). Construct its side view, bottom view and top view, where 3rd image plane is perpendicular to the front image
39

plane. 5. Construct the related views of the right circular cone with base in the ground image
plane, determined by the centre of the base S(2; 4; 0), radius r = 3,5 and hight v = 7. Construct its side view, bottom view and top view, where 3rd image plane is perpendicular to the front image plane.
6. Construct the related views of the right circular cylinder with base in the ground image plane, determined by the centre of the base S(-3; 5; 0), radius r = 3 and hight v = 5. Construct its side view, bottom view and top view, where 3rd image plane is perpendicular to the front image plane.
40

AXONOMETRY
Mission
Teach students projection method, which allows to construct very illustrative projection of the object easily. The chapter sets out the basic principles of axonometric and its distribution. There are presented in detail three types of oblique axonometry: Military perspective, Cavalieri´s axonometry and Cabinet axonometry. There is also described Eckhard´s method and its applications in orthogonal axonometry. Based on this knowledge there are constructed axonometric projections of some solids.
Aims
1. Be able to construct axonometric view of solid determined by its ground and frontal view in any oblique axonometry.
2. Be able to construct axonometric view of solid determined by its ground and frontal view in orthogonal axonometry by using Eckhard´s method.
Axonometry is a parallel projection onto one image plane – the axonometric image plane α, which does not coincide to any of the coordinate planes π, ν, μ. Space figures can be projected onto the axonometric image plane, together with their ortgohraphic views to the coordinate planes, and the entire coordinate trihedron Oxyz.
O
Oa
X YX
Z
s
jxa jya
jza
j j
j
x y
π
ν μ
α
z za
yaxa
The direction s of the projection can be perpendicular or not perpendicular to the axonometric image plane α, and then we speak about orthogonal axonometry (if s ⊥ α) or oblique axonometry.
The axonometric image plane α intersects all coordinate planes, α ∩ π = XY, α ∩ ν = XZ, α ∩ μ = YZ. Triangle Δ XYZ, with vertices in the intersection points of the coordinate axes x, y, z and axonometric image plane α, is the axonometric triangle (or Pelc triangle).
41

Oa
jxa jya
jza
xa ya
za
In this figure there are views of coordinate axes with the views of unit j on these axes. The axonometric views of the coordinate axes x, y, z in the axonometric image plane α, are lines xa, ya, za. The axonometric view of the origin is O in the plane α is Oa.
xa ya
za
X Y
Z
Oa
Figure Oaxayaza is denoted as the axonometric axial cross. The axonometric image plane α can be translated in the direction s , while the size of the axonometric triangle Δ XYZ will change, with respect to the different distance of the plane α and the origin O, but the view of the axonometric axial cross will remain unchanged. All Pelc triangles are similar to each other. They are scaled by a ratio in the homothety with the centre in the origin O, and they determine the same axonometric projection. Views of unit j on the axonometric axes xa, ya, za are jxa ≠ jya ≠ jza (usually).
xa xaya ya
za za
In this figure there are the views of a cube. In the case, when the origin O is located behind the image plane α the axonometric projection is a view from above, with the visible top base of the cube. In the case when the origin O is located in front of the image plane α, the axonometric projection is a view from below with the visible bottom base of the cube.
Let the general axonometric projection be given by the image plane α and direction of the projection s, not located in the image plane s ⊄ α. Numbers p, q, r determine the ratio of the length of views jxa, jya, jza of unit line segment j on the coordinate axes with p = jxa / j, q = jya / j, r = jza / j as the scaling coefficients (showing the ratio of shortening or lengthening the axonometric views of separate coordinate axes).
View of a point in axonometry
42

Oa
jxa jya
jza
xa
za
ya
Aa
A2a A3a
xaA
yaA
zaA
A1a Point A is determined by coordinates xA, yA, zA. In the figure there is the axonometric view of a coordinate rectangular parallelepiped of the point A. Points z
aya
xa AAA ,, are intersection
points of axes x, y, z and planes parallel with π, ν, μ passing through the point A. Points A1, A2, A3 are foots of a perpendicular line from point A to planes π, ν, μ. The sizes of the rectangular parallelepiped are: xajxx .AA
a == xaa AO , yajyy .AA
a == yaa AO ,
zajzz .AAa == z
aa AO . Points A1a, A2a, A3a are the axonomertic ground, front and side views of the point A, and Aa is the axonometric view of the point A.
Oa
jxa jya
jza
xa
za
ya
Aa
xaA
Aax
Aaz
A1aAay
Point A can be mapped applying axonometry as shows figure.
OBLIQUE AXONOMETRY
A
s
α Aa
Pohlke´s Theorem: For three line segments (no collinear pairs) of specified length (not necessarily of the same) which meet at a point in a plane, there are three equal length line
43

segments which meet at right angles at a point in a 3-dimensional space, and by way of a parallel projection these segments, are projected onto three chosen line segments in the plane.
O Oa
X
YX
Z
s jx
jy jz
j
j j
x
y
α
z za
ya
xa It means that the three no collinear line segments of jxa, jya and jza lengths with a single common point are the parallel views of three consecutive edges of any cube.
On technical drawings, where ground views, or side views and profiles of the mapped figures are the most important once, different oblique axonometric projections are widely used.
Military perspective
Military perspective is a projection method suitable for technical drawings in urban architecture, in design of habitations and suburbs. Costruction of views of complex objects with complicated ground views and not-easy-to-survey structures is a relatively easy.
xa ya
za
1 1
1
Views of coordinate axes x and y are perpendicular, and the scaling coefficients satisfy the ratio p : q : r = 1 : 1 : 1, it means jxa = jya = jza = k.j, where k > 0.
xa
ya
za
Oa
Any object can be displayed in this perspective.
44

Cavalieri´s axonometry
Cavalieri´s axonometry is an oblique projection with the image plane parallel to the frontal image plane or the side plane. It was widely used in the 16th and 17th century, for constructions of maps ( called veduty ) of important towns and settlements. Views of coordinate axes x and z, or y and z are perpendicular, and p : q : r = 1 : 1 : 1, it means jxa = jya = jza = k.j, k > 0.
xa
xaya
ya
za za
1 1
1 1
1 1 45° 45°
Left view Right view
xa
ya
za
Oa
xa
ya
za
Oa
An object with interesting details at one side is displayed in the figures above. To preserve the details of the figure, then this side of object is located into plane xz when to show the object in left view into plane yz to show the object in right view.
Cabinet axonometry
Cabinet axonometry is an oblique projection with the image plane parallel to the frontal image plane or the side image plane. The views of coordinate axes x and z, or y and z are perpendicular, and p : q : r = 1 : 1/2 : 1, or p : q : r = 1/2 : 1 : 1.
xa
xa ya
ya
za za
1 1/2
1 1
1/2 1 45° 45°
Left view Right view
xa
ya
za
Oa
45

Oblique projection
Oblique projection is a bit more realistic mapping mostly used in technical drawings in mechanical engineering. Views of coordinate axes x and z, or y and z are perpendicular, and the ratio of scale coefficients is 1 : q : 1, or p : 1 : 1 (while q, or p is from the interval (0, 1)). Angle ω is from the interval (0, 360°). In the so called technical projection, the oriented angle of the coordinate axis y to the view of the coordinate axis x is equal to 135 °, and jya = 1 / 2 .
Eckhardt´s method in oblique axonometry
Intersection, or Eckhardt´s method in oblique axonometry is widely used in constructions of realistic views of different objects determined by two orthographic views. In the oblique axonometric projection, the position of orthographic views of figures and the direction of the translations 1s, 2s can be determined arbitrarily, with respect to the realism of the oblique axonometric view.
A1
A2
Aa
1s
2s
U2
U1
Ua
Figure presents an oblique axonometric view of a composed solid U determined by the ground view and frontview. The position of the viewes and the directions of translations chosen respecting the real image of the solid.
1s 2s
A1 A3
Aa
46

Figure presents an oblique axonometric view of a composed solid also determined by the front and side views.
ORTHOGONAL AXONOMETRY
O
x
y
z
P
X
Y
Z α
π
νμ
Oas
The axonometric image plane α intersects all the coordinate planes, α ∩ π = XY, α ∩ ν = XZ, α ∩ μ = YZ. Triangle Δ XYZ, with vertices in the intersection points of the coordinate axes x, y, z with the axonometric image plane α is termed as the axonometric triangle (or the Pelc triangle). Direction s of the axonometric projection is perpendicular to the image plane α, s ⊥ α.
xa ya
za
X Y
Z
Oa
P
N M
Orthographic views of the coordinate axes x, y, z in the axonometric image plane α, are seen as lines xa, ya, za perpendicular to the sides of the axonometric triangle Δ XYZ. The orthographic view of the origin O in the plane α locates in the orthocentre of the triangle Δ XYZ.
View of a point in orthogonal axonometry
Oa
xa
za
ya
Aa A3a
A1a
A2a
O
X Y
Z
AAa
A1a A1 π=x=y
z
α Z
X=Y
s Oa
47

Point A in the space can be mapped orthogonally to the ground view A1 in the ground plane π. The orthographic view Aa of the point A in the axonometric image plane α – the axonometric view, and the orthographic view A1a of the ground view A1 in the α – the axonometric ground view, form a pair of axonometric views of the point A related in the direction of the view of axis z, perpendicular to the side XY of the axonometric triangle.
Point A is unambiguously determined by a pair of its axonometric views (Aa, A1a). Similarly, any point A in the space can be determined by an ordered pair of axonometric views
(Aa, A2a) – axonometric view and axonometric frontview, (Aa, A3a) – axonometric view and axonometric side view.
The axonometric ground view and axonometric view of the ground image plane coincide (z = 0 for all points), the axonometric front view of the ground image plane is formed in the view of the axis x, and axonometric side view in the view of the axis y.
Oa
xa=π2a=ν1a ya=π3a=μ1a
za=μ2a=ν3a
νa=ν2a μa=μ3a
πa=π1a
Pa=P1a
P2a
P3a
Ma=M3a
M1a
M2a
N1a
N3a Na=N2a
All points in the ground image plane have a coincidental axonometric view and an axonometric groundview, Pa = P1a. Similarly, for all points in the frontal image plane Na = N2a, the axonometric ground view of the frontal image plane is located in the view of the axis x, axonometric side view in the view of the axis z. The axonometric ground viewe of the side image plane is located in the view of the axis y, the axonometric front view in the view of the axis z, and Ma = M3a for all points in the side image plane.
The axonometric triangle Δ XYZ can determined any ortogonal axonometry. If it is a scalene triangle, then the length of the views of the unit line segments jxa, jya and jza on coordinate axes are different, and the axonometric projection is called trimetry. If axonometric triangle Δ XYZ is an equilateral triangle, then the length of the views of the unit line segments jxa, jya and jza on the coordinate axes are equal, and the axonometric projection is called as isometry. If it is an isosceles triangle, then the lengths of two views of the unit line segments jxa, jya and jza on coordinate axes are equal, and the axonometric projection is called as dimetry.
Eckhardt´s method in orthogonal axonometry
Axonometric view of a figure can be constructed easily, given two orthographic viewes, ground view and frontview. Rotating the ground image plane π about the line XY to the axonometric image plane α, rotated coordinate system can be determined (Oo, xo,yo). To make the drawing readable, rotated ground image plane can be translated into the drawing sheet in the direction of the coordinate axis za, out of the axonometric triangle Δ XYZ and the ground view of the point A can be determined by the coordinates xA, yA. Similarly, the frontal image plane ν can be rotated about the line XZ to the axonometric image plane α, and the rotated
48

coordinate system can be determined as ( )ooo zxO ′′′ ,, . The rotated frontal image plane can be translated in the direction of the coordinate axis ya out of the triangle Δ XYZ. Using coordinates xA and zA, the front view of the point A can be determined. The axonometric view of the point A is the piercing point of the line passing through the point A1 parallelly to the coordinate axis za, and the line passing through the point A2, parallelly to the coordinate axis ya.
xa
ya
za
X Y
Z
Oa
oO′
Oo
xo
ox′
x1
x2
yo
y1
oz′z2
A1
A2
Aa
O2
O1
y1
Oa
yo
x1
xo
ox′
x2
z2
0z′ za
xa
ya
O2
O1
Oo
oo′
Eckhardt´s method is used to display the axonometric view of a composed solid based on the ground and front views of this solid (in the figure above).
y1
x1
x2
z2
O2
O1
49

Exercise 1: Find the axonometric view of the right hexagonal truncated prism determined by its ground and frontal views by using Military perspective.
E2
A1=A1
A2
B1=B1
C1=C1
D1=D1
E1=E1 F1=F1
A2
B2
B2
C2 D2
F2
F2 x1,2
y1
z2
O1,2
Ba
Ba
Aa
Aa
Ca
CaDa
Da
Ea
Ea
Fa
Fa
xa ya
za
Oa
Exercise 2: Find the axonometric view of the right hexagonal truncated prism determined by its ground and frontal views by using left view and right view in the Cavalieri axonometry.
Ba
Ba
Aa
Aa
Ca
Ca Da
Da
Ea
Ea
Fa
Fa
xa
ya
za
Oa
Daxa
ya
za
Oa
Es
Fa
Da
Aa
Ca
Ba
Ba
Ca
Aa
Es
Fa
Exercise 3: Find the axonometric view of the right hexagonal truncated prism determined by its ground and frontal views by using left view and right view in the Cabinet axonometry.
Ba
Ba
Aa
Aa
Ca
Ca
Da
Ds
Ea
Ea
Fa
Fa
xa
ya
za
Oa
Da
xa
ya
za
Oa
Ea
Fa
Da
Aa
Ca
Ba
Ba
Ca
Aa
Ea
Fa
50

Exercise 4: Find the axonometric view of the right hexagonal truncated prism determined by ground and frontal views by using Eckhardt´s method in orthogonal axonometry
E2
Fa
A2
B2
B2 C2 D2
F2
yo
Oa
yo
xo
xo
xo
xo
zo
zo za
xa
ya
Ca Ba
Aa Da
Ea
Ea
Da
Ca
Fa
Aa
Oo
Oo
A2
C2
D2
E2
F2
A1=A1
B1=B1C1=C1
D1=D1
E1=E1 F1=F1
Oo
Ba
Examples of self-evalution
20
50
70
SS 21 =
S1
S2
Construct the axonometric view of the solid determined by the ground and frontal view in the figure above:
1. In Military perspective, 2. In Cavallieri´s axonometry, 3. In Cabinet axonometry,
51

CENTRAL PROJECTION
Mission
The mission is to get the properties of central projection and learn describe regular multifaced solids (prisms, pyramids) with base in general plane.
Aims
1. Being able to view the point, line and plane planar in the central projection.
2. Being able to find the true size of the line segment lying in a plane determined by the plane trace and vanishing line.
3. Being able to describe the line perpendicular to the plane and put the line segment of size h on it.
4. Being able to find the image of a square, hexagon or oblong located in thegeneral plane.
5. Being able to describe the regular multifaced solids (prisms, pyramids) with base in general plane.
Central projection is a projection from a fixed point S – centre of projection not located in the chosen vertical plane ν – image plane into this image plane. Exepting the central image of a body, its additional orthographic image into the image plane ν can be used. Point S2 is the orthographic view of the point S into the image plane ν. The distance between the centre of projection and the image plane is termed as the distance of the central projection | S ν | = d.
Central projection is unambiguously determined by image plane ν, centre S and by distance d, (S2, d).
VIEW OF A POINT View of an arbitrary point A ≠ S is defined as a point Ac ∈ ν, which is the intersection point of the line AS – projection line passing through the points A, S and the image plane ν, Ac = SA ∩ ν. Let A2 be the orthographic view of the point A in the image plane ν that unambiguously determinate of the position of the point A in the space. The distance can be represented by distance circle with centre S2 and radius d, cd = ( S2, d ).
SS2
A A2
Ac
d
ν
sA
S2
A2
(S)
(A)
Ac
d
cd
View of the ideal point ∞U ∈ a is the real point Uc – the vanishing point. It is the intersection point of line a′ – the directional line parallel to the line a, and it passes through the centre S,
52

a′ ׀׀ a, of line a and the image plane ν. The point can be determined by any line – line medium of a point A ∈ a.
SS2
a
∞U
Uc
d
ν
a′ 2a′
∞U
If the projection line of the point is parallel to the image plane, then the view of the point is an ideal point in the image plane. The set of all real points mapped in ideal points are termed as the central plane. It is a plane parallel to the image plane that passes through the centre of projection S.
VIEW OF A LINE
View ac of the line a not passing through the centre S is the intersection line of the projecting plane (S,a) and the image plane ν. All points located on the line a are mapped in the points on the line ac.
The intersection point of the line a and the image plane ν is the trace Na. The directional line a′ parallel to line a ( a′ ׀׀ a ), passing through the centre S, intersects the image plane ν in the vanishing point a
cU of the line a. Line a is unambiguously determined by its trace Na and the vanishing point a
cU . Trace and vanishing point of a line are its real points only in case when the line is not parallel to the image plane. Trace and vanishing point are identical, Na = a
cU , only in case when the line is passing through the centre S. Trace, vanishing point and point S2 are identical, S2 = Na = a
cU , only in case when the line passing through the centre S is perpendicular to the image plane ν.
SS2
ν
a
ac
Na
acU
A Ac
BBc
a′S2
acU
Na
cd
ac
Ac
Bc
A2
a2
2a′
53

If point A lies on line a behind the image plane, its image Ac lies on line ac inside the line segment Na a
cU . If point B on line a lies in front of the image plane, its view Bc lies outside the line segment Na a
cU . The line S2acU = 2a′ is the orthographic view of the directional line a′
of line a.
VIEW OF A PLANE
View of the plane ρ not passing through the centre S is formed as the entire image plane. View of the plane passing through the centre S is a line. View of all points and lines in the plane ρ are points and lines in the image plane ν. In this case, the geometrical relationship is known as central collineation of two different planar fields in one plane, where centre of collineation is the centre of projection S. The intersection line of the plane ρ and the image plane, nρ = ρ ∩ ν is the plane trace identical with its view, and it is termed as the axis of collineation. View of any ideal line (line at infinity) ∞u of the plane ρ is the vanishing line
ρcu , which is an intersection line of the directional plane ρ′ ׀׀ ρ passing through the centre S,
and image plane ν, ρcu = ρ′ ∩ ν is obtained.
ρ′ ρcu
ν
S
nρρ
acU
Na
ac
a
a′
A Ac
S2
acU
Na
cd
ac
ρcu
nρ
//
//Ac
If the vanishing line of a plane is a real line, then the plane is determined by its plane trace and vanishing line. If it is an ideal line, then the vanishing line is identical with plane trace and the plane is parallel to the image plane.
ρ′ ρcu
ν
S
nρρ
ρch
hρ
S2
cd
ρch
nρ
ρcu
ρch
54

The principal line ρh of the plane ρ is parallel to its trace and also to the image plane. Then view ρ
ch of the principal line ρh is parallel to the plane trace ρsh .nρ ׀׀
ρ′ ρcu
ν
S
nρρ
scU
s′
s
sc
Ns
2s′
S2
scU
Ns
cd
sc
ρcu
nρ
2s′
ρch
The vanishing point s
cU of the slope line s of the plane ρ lies on the vanishing line ρcu and on
the directional line of all slope lines of the plane ρ, scU = s′ ∩ ρ
cu . The slope line s is perpendicular to the plane trace s ⊥ pρ, then its directional line s′ is also perpendicular to the vanishing line s′ ⊥ ρ
cu and the point scU is the foot of the perpendicular line to the vanishing
line ρcu passing through the S . Point s
cU can be formed using the orthographic view of s′ in the plane ν, where ρ
c2sc usU ∩′= . All slope lines of the plane ρ are parallel to each other
hence they have a common vanishing point – the vanishing point of the slope lines.
We can see that in central projection two perpendicular lines are projected in lines not perpendicular.
Superposition of a point and line in a plane
If the line a is located in the plane ρ then its trace Na is located on the plane trace nρ and the vanishing point a
cU is located on the vanishing line ρcu of the plane ρ. If point A is located in
plane ρ, then it is located on any line a of the plane ρ.
Views of the parallel lines a ׀׀ b have a common vanishing point bc
ac UU = (Fig. a). If two
parallel lines a, b have an ideal common vanishing point, their views are parallel to each other (lines are parallel to the image plane).
Na
bc ac
Nb
bc
ac UU =
nρ
ρcu
Na
bc
ρcu
nρac
Nb
acUb
cU
Rc
Views of intersecting lines a × b are intersecting lines too, and lines ρ
cbc
ac uUU = and
ρba nNN = are parallel, because lines a, b determine the plane with the plane trace nρ and the
55

vanishing line ρcu (Fig. b). Two skew lines are not located in one plane, then lines b
cac UU and
baNN are always intersecting (Fig. c).
Na
bc ac
Nb
acU
bcU
Superposition of two planes
ρ′=σ′ σc
ρc uu =
ν
S
nρρ nσσ
S2
cd
σc
ρc uu =
nρ
nσ
If two planes are parallel ρ ׀׀ σ, then they have a common vanishing line σ
cρc uu = and their
traces are parallel nρ ׀׀ nσ, too.
ρcu
nρ
nσ
σcu
lc
lcU
Nl
If two planes are intersecting ρ × σ, they have a common line l – the intersection line. If both planes ρ, σ are not parallel to the image plane and its traces are intersecting lines, then intersection line l = ρ ∩ σ lies in both planes, and its line trace Nl = nρ ∩ nσ and the vanishing point σ
cρc
lc uuU ∩= . View of the intersection line l of the planes is l
cl
c UNl = . ρcu
nρ
nσ
σcu
lc
acU
Na
λcu nλ
NbbcU
ac
bc
Rc
56

If the plane traces are parallel lines, then the intersection line l is also parallel to them and therefore we need only one point R using a new arbitrary plane λ. Intersection lines a, b of this plane and planes ρ and σ, a = ρ ∩ λ, b = σ ∩ λ have an intersection point R ∈ l.
Intersection point of a line and a plane
If a line is not located in the plane, then there exists an intersection point of the line and the plane. In case the line is parallel to the plane, the intersection point is an ideal point.
Exercise 1: Find the intersection point of the line a and plane ρ.
ρcu
nρ
lc
acU
Na
nλ
lcU
ac
Rc
λcu
Nl
Solution: Let λ be an arbitrary plane passing through the line a
caUN a = determined by its
trace and vanishing point. If line a and plane ρ are not parallel to the image plane, we can use two parallel lines passing through the vanishing point a
cU and trace aN , and they can be formed as the vanishing line λ
cu and plane trace nλ of the plane λ. The intersection line of the planes ρ and λ is line l (ρ ∩ λ = l) and line lc = Nl l
cU is its view. The trace of the line l can be determined as the intersection point of both plane traces σλl nnN ∩= and its vanishing point can be the intersection point of both vanishing lines ρ
cλc
lc uuU ∩= . The desired intersection
point of the line a and the plane ρ is point R and is determined as the intersection point of two lines R = l ∩ a and Rc = ac ∩ lc is its view.
SIZE OF A LINE SEGMENT
The line segment of the line a is determided by its trace and the vanishing point ac
aUNaAB =⊂ , where line a is not parallel to the image plane. Then solving a metric problems in central projection, the projection must be determined by an orthographic view S2 of the centre S and a distance circle cd.
Exercise 2: Find the true size of the line segment AB using the measuring circle.
Solution: View of the line segment AB as a part of the line a determined by its trace and vanishing point aaUNaAB =⊂ is defined as a
ca
ccc UNaBA =⊂ . Line a located in any
plane ρ is determined by its plane trace nρ and vanishing line ρcu . The orthographic view of
the directional line 2a′ is lowered into the image plane using the lowered centre (S) ∈ cd, where (S)S2 ⊥ 2a′ , then (a′) = a
cU (S). Let rΔ be the size of directional line a′. The measuring
57

point MΔ for measurement on line a lies on the measuring circle with centre acU and radius
rΔ cΔ = ( acU , rΔ) and on the vanishing line ρ
cu , MΔ = kΔ ∩ ρcu . The size q of the line segment
AB appears by points A′, B′ in the position A′ = MΔAc ∩ nρ, B′ = MΔBc ∩ nρ, q = | AB | = | A′B′ |.
ρ′ ρcu
ν
nρρ
a
a′acU
Na
ac
S
A
Ac
A′
cΔ MΔ
q B B′
Bc
S2
acU
Na
cd
ac
ρcu
nρ
cΔ
MΔ
rΔ (S)
Ac
A′
q
Bc B′
2a′ (a′)
LINE PERPENDICULAR TO A PLANE
All lines perpendicular to a plane are parallel to each other, then they have a common directional line k′ and a common vanishing point k
cU – the vanishing point of the lines perpendicular to the plane ρ.
Exercise 3: Find the perpendicular line passing through point A located in plane ρ and put the line segment of size h on it.
ρcu
ν
nρ
scU
s′
s
ρ
λcu
nλ
λ λ′ k′
k
sc
Ns
Nk
kcU
S
kc
A Ac
A′
Bc
MΔ kΔ
ρ′ B′B
nλ
Ac
Bc
A′
B′
h
S2 (S)
(s′)
(k′)
Ns
Nk
sc
kc 22
λc sku ′=′=
ρcu
nρ
MΔ
scU
kcU
cd
cΔ
Solution: View of a slope line passing through the point A is defined as sc = Ns s
cU . Line k perpendicular to the plane ρ (k ⊥ ρ) and the slope line s are perpendicular ( k ⊥ s ). They both are located in plane λ ⊥ ρ. The vanishing line of this plane λ
cu is perpendicular to the
58

vanishing line ρcu and passing through the vanishing point of the slope lines s
cU . The trace of plane λ passing through the trace of the slope line Ns.
The lowered directional line (k′) is perpendicular to the lowered directional line (s′). The vanishing point k
cU of all lines perpendicular to plane ρ is intersection point of (k′) and
vanishin line λcu . View of the line k is known as kc = Ac
kcU . Let us put the line segment AB
of size h on the perpendicular line k using measuring point MΔ ( Exercise 2 ).
ROTATION OF A PLANE INTO THE IMAGE PLANE
Rotation of the plane ρ about its plane trace is used to construction of view of any planar figures in this plane. Plane ρ is rotated to the image plane about its trace nρ, and its directional plane ρ′ ׀׀ ρ are rotated together about the vanishing line ρ
cu in the same direction.
ρ′ ρcu
ν
S
nρρ
s
A
So
scU
Ns
Ao
Ac
sc
S2
ρ′ ρcu
nρ
S
So
Ac A
ρ
s
Ao
s
The rotation of the plane ρ into the image plane may be replaced by way of a parallel projection of the plane ρ into the image plane in the direction s determined by line SSo. In this parallel projection the connecting lines of the points of the plane ρ and the corresponding rotated points ( AAo, ...) are parallel to the line SSo. Views of these parallel lines ( AAo, ...) are lines ( AcAo, ...) that pass through the same point So ( rotated centre of the projection S ), because their directional line is intersection point So. The intersection points of the views of lines ac,… and the rotated lines ao,… lie on the plane trace nρ.
Therefore this theorem is of great importance:
The relation between figure of the plane ρ rotated into the image plane about its trace nρ and its view is termed as central collineation which is determined by its centre in the rotated point So, axis in the plane trace nρ and vanishing line ρ
cu .
Exercise 4: Rotate the line segment AB located in plane ρ into the image plane, when the views of its end points Ac a Bc are determined. Plane ρ is determined by its plane trace nρ and vanishing line ρ
cu .
59

S2
scU
Ns
cd
sc
ρcu
nρ
(S)
So
so
Ao
Ac
Bo
Bc
1=1o
Solution: Central projection is determined by an ortographic view of a centre S2 and by a distance circle cd. Point So is point S rotated about vanishing line. View of the slope line passing through the point A is known as sc = Ac
scU . The rotated slope line so is perpendicular
to the plane trace nρ and passes through its trace Ns. The rotated point A is Ao = so ∩ SoAc. The rotated line segment ooBA is the collinear view of the line segment ccBA .
VIEW OF A POLYGON IN THE PLANE
Exercise 5: Find the square determined by view Oc of its centre O and view Ac of its vertex A located in plane ρ. The plane ρ is determined by trace nρ and the vanishing line
ρcu .
S2
So
(S)
cd
Oc
Oo
ρos
ρcs
ρcu
nρ
scU
Ao
Co
Do Ac
BcCc
Dc
1=1o 2=2o
Ns
Bo
60

Solution: So is centre S rotated about vanishing line ρcu . AoOo is line AO rotated about plane
trace nρ into the image plane. The rotated square AoBoCoDo is determined by its centre Oo and vertex Ao. Views of another vertices Bc, Cc, Dc are obtained and by using central collineation (Exercise 4).
If we want contruct view of a planar figure with known form and with its unknown size, then we can construct view of a similar figure. In this case, the plane trace is not needed.
Exercise 6: Find view of an oblong located in plane ρ determined by view of its side AcBc with ratio 3:2 of sizes of its sides.
Solution: Let 1Uc ∈ ρcu be vanishing point of the line a = AB. Let us construct the vanishing
point 2Uc of the line b perpendicular to the line a in plane ρ (the rotated directional lines are perpendicular to one another oa′ ⊥ ob′ ). Let us construct the lines CcBc, DcAc by using vanishing point 2Uc, points Cc, Dc located on the diagonal of the oblong with vanishing point 3Uc and determined by the diagonal of the rotated oblong with one vertex in So and with ratio 3:2 between sizes of its sides. Then point Dc = 3UcBc ∩ 2UcAc and Cc = 2UcBc ∩ 1UcDc.
S2
scU1Uc
cd
ρcu
nρ
(S)
So
Ac
Bc
2Uc3Uc
3 2
CcDc
ac
oa′ ob′
bc
VIEW OF A SOLID
Exercise 7: Find the right pyramid with the hexagonal base in the plane ρ determined by views Oc, Ac of the centre O and vertex A and its altitude is h.
Solution: Plane ρ is determined by its trace nρ and vanishing line ρcu . Construction of view of
the basic hexagon determined by centre Oc and vertex Ac is similar with previous Exercise 4.6. Let us construct view oc of the axis o of the solid perpendicular to plane ρ and put the line segment OcVc of size h on it (Exercise 3). Let us construct view of the right hexagonal pyramid.
61

S2
scU
Ns
cd
sc
ρcu
nρ
(S)
So
Ac
kcU
Vc
O′
V'
cΔ
MΔ (s')
(k')
oc
so
Bc
Cc Fc
Dc
Ao
Bo
Co
Do
Eo
Fo
Oo
Oc
1=1o2=2o
Exercise 8: Find view of the right prism with its oblong base in plane ρ determined by its side AB with ratio 2:3 of sizes of its sides and altitude h.
Solution: The construction view of the oblong base is similar to the one in Exercise 4.6. The lateral edges of the prism are perpendicular lines to the plane ρ with a common vanishing point k
cU . The line segment of size h is put on the lateral edge ac. The top base is located in the plane parallel to the plane ρ and its edges are parallel to edges of bottom base located in the plane ρ, therefore their images ccCB ′′ , ccDA ′′ are passing through the vanishing point 1Uc and cc AB ′′ , ccDC ′′ through vanishing point 2Uc.
S2
1Uc
cd
ρcu
nρ
(S)
So
Ac
Bc
2Uc3Uc
3 2
Cc Dc
kcU
MΔ h
Ns
sc A'
A"
cA′
cB′
cC′cD′
ac
62

Self-evaluation examples
1. Describe the regular hexagon determined by image Oc(1,5; 3) of its centre O and image Ac(0; 2) of its vertex A located in plane ρ[ ( )5,, ∞= ρρ
ss uxn ] in the central projection [S2 (0; 3), d = 5].
2. Describe the right pyramid with the hexagonal base in the plane ρ[ ( ),5ux,n ρs
ρs ∞= ]
determined by images Oc(2; 2,5), Ac(5; 0,5) of the centre O and vertex A and its altitude is h=5,5 in the central projection [S2 (0; 2,5), d = 3] .
3. Describe the right pyramid with the hexagonal base in the plane ρ[ ( ),7ux,n ρs
ρs ∞= ]
determined by images Oc(-2; ,5), Ac(-0,5; 2) of the centre O and vertex A and its altitude is h=8 in the central projection [S2 (0; 4,5), d = 5] .
4. Describe the right pyramid with the pentagonal base in the plane ρ[ ( ),7ux,n ρs
ρs ∞= ]
determined by images Oc(2; 3,5), Ac(0,5; 2) of the centre O and vertex A and its altitude is h=5,5 in the central projection [S2 (0; 4,5), d = 5] .
5. Describe the right prism with its oblong base in plane ρ[ ( )5,, ∞= ρρss uxn ] determined by
its side AB [Ac(1,5; 2,5), Bc(-2; 0,5)] with ratio 3:2 of sizes of its sides and altitude h=5 in the central projection [S2 (0; 2,5), d = 3,5].
6. Describe the right prism with its oblong base in plane ρ[ ( )5,, ∞= ρρss uxn ] determined by
its side AB [Ac(-1; 1), Bc(-5; 3)] with ratio 4:3 of sizes of its sides and altitude h=7 in the central projection [S2 (0; 3), d = 4,5].
7. Describe the right prism with its square base in plane ρ[ ( )5,, ∞= ρρss uxn ] determined by
its side AB [Ac(2; 2,5), Bc(-1; 1)] in the central projection [S2 (0; 3), d = 4]. 8. Describe the cube with its base in plane ρ[ ( )5,, ∞= ρρ
ss uxn ] determined by its side AB [Ac(2; 2,5), Bc(-5; 3)] with ratio 4:3 of sizes of its sides and altitude h=7 in the central projection [S2 (0; 3), d = 4].
63

LINEAR PERSPECTIVE
Mission
The mission is to get the properties of the linear perspective as a special central projection and show two types of linear perspective: bounded and unbounded perspective.
Aims
1. Being able to find the image of a composed object in a bounded perspective using the intersectional or contour method.
2. Being able to find the image of a line lying in the horizontal plane in different positions (frontal, non-frontal, underground lines) and vertical lines.
3. Being able to divide the line segment into n identical segments.
4. Being able to find the image of a square or an oblong determined by its AB side and the ratio of the side sizes.
5. Being able to find the image of a prism with a base in horizontal plane and to locate a composed object in it.
Linear perspective as a special type of central projection, is the most illustrative projection, because of being similar to human visual senses. This projection preserves lines, therefore is called linear. Projection on the curved retina is not linear, that is why the methods of central projection must be suitably adapted. An eye is compensated for the centre of projection S, the view on the retina by projection into the image plane ν. Linear perspective is the central projection of a limited part of space, the human eye is able to observe without moving head.
Linear perspective is a special case of central projection, which is based on the principles of human vision. These conditions areas follows:
a) Minimal distance between the observer´s eye and the observed object must be 22 – 25 cm for clear vision. Therefore the distance is bigger a 25 cm.
b) If the observer does not move with his eye, he can see only part of the space inside the conical surface of the vision which is a conical surface of revolution with the apex in the centre of the eye. Its axis lies in the optical axis of the eye and apex angle is about 60°. Circle of the vision cv wiht radius r is the intersection of the conical surface and image plane.
Sd cv
ν Conical surface of
vision
r
H
64

There are three types of perspective with radius r = d, r = d/2, or r = d/3 in practice. The first type is suitable for displaying interiors and solving urban units, the second and the third ones present the perspective of smaller sets of buildings and smaller architectural objects (roads, viaducts,…). Further we will focus on the conical surface of the vision with apex angle to 60°, i.e. the radius of circle of vision cv is half of the distance r = d/2.
H 1Uc 1Uc
2Uch
a) b)3cU
2Uc
c)
Architectural objects are bounded to the horizontal plane, therefore this plane π – the ground plane is projected with the view of the object. If the image plane is vertical ν ⊥ π, then the perspective is a one point perspective (Fig. a), when we look directly at the side of an object (the object is in frontal position), or two point perspective (Fig. b), when we look at the corner of a projected object (object is in a non-frontal position). If the image plane is oblique, then the perspective is termed as three point or oblique perspective (Fig. c), with the angle between oblique image plane and ground plane usually larger than 60°.
kcU∞
ν
S
g
π
A1
H
S1
∞Uk∞Uk
A1c
Ac
A
g
h H
A1c
Ac
h
S
g
π
A1
S1
Uk
A
ν
HA1c
Ac
h h
g A1
A
Uk
A1c
Ac
H
S
S1
ν
π
π′
gH
h
kcU
A1c
Ac
a) b)
In Fig. a) there is the vertical and in Fig. b) the oblique image plane displayed together with ground plane π, with their vanishing line at h – the horizon line. The plane trace of π is g – the ground line. The vanishing point of all perpendicular lines to the plane π for vertical perspective is an ideal point ∞Uk located on the line perpendicular to the horizon line h. In oblique perspective Uk is the real point. The view of any point A which is the interior point of the circle of vision is Ac – the perspective view of the point A. Point A1 is the foot of a perpendicular line to the plane π passing through the point A and is the orthographic view of the point A into the plane π. Its view A1c is not important for us.
Terms used in linear perpective are: ν - Image plane – vertical plane
65

S - Centre of projection (eye) S1 - Position of observer H - Main point – orthographic view of the centre S to the image plane ν d - distance between centre S and image plane ν SH - Main line π - Ground plane π′ - Horizon plane – directional plane of all horizontal planes h - Horizon line – vanishing line of all horizontal planes g - Ground line – intersection line of the ground plane and image plane G Ground point – intersection of main vertical line and ground plane κ - Vertical plane – perpendicular plane to the image plane passing through the centre S v - Main vertical line s - Slope line D - Distant point: right, left, upper, lower – lovered centre S into vertical or horizontal
plane Ac - View of the point A
Linear perspective is a special case of central projection therefore it has similar characteristics. The main point H is the vanishing point of lines perpendiculat to the image plane ν.
A
B
S
S1
LeD
H
h
g
GAc
Bc sc
s π
π′
ν
κ
v
45°
d
H
cv
h
G g
v
cU D
cLo D
cLe D c
R D
sc
Vanishing points of lines in the ground plane π and in planes parallel to π are located on the horizon line h and which is the vanishing line of all horizontal planes.
Distant point (right or left) is the vanishing point of the lines located in horizontal planes, which form 45° angle with the image plane.
Vanishing points of vertical lines are ideal points. Views of vertical lines are the lines perpendicular to the horizon h.
Frontal line is a line parallel to the image plane. The frontal plane figure lies in a plane parallel to the image plane and its view is similar to its original.
Views of objects in parallel image planes 1ν, 2ν, 3ν, ... with same centre S are homothetic with centre of homothety in the point S. If planes 1ν, 2ν, 3ν, ...are translated in the direction of the main line SH into plane ν, then views of object will be homothetic with centre of homothety in the point H = 1H = 2H = 3H .... Therefore, the following theorem is significant to remember:
66

H
1Ac
h
3Ac
2Ac
Every correctly constructed view of an object can be arbitrarily homothetically extended or reduced with point H as a centre of homothety.
Linear perspective is determined by horizon line h, main point H and distance d. The ground line g can be projected also to accurate by determine the ground plane.
View of an object can be constructed by several methods. No method in itself is useful sufficient to construct the whole view. One is to combine, appropriately several methods when construct the view and it is simultaneously a check of accuracy of construction.
Two basic methods of construction perspective views:
a) Bounded method (indirect). The related views of an object are necessary important to construct the perspective view.
b) Unbounded method (direct). The perspective view of object can be constructed directly without related views of this object, only size and form of object is necessary to known.
Accordingly we speak about bounded perspective or unbounded perspective by the method used for construction of the view of an object.
BOUNDED PERSPECTIVE
The ground image plane π is projected together with the projected object in a bounded perspective.
Exercise 1: Find the view of the right parallelepiped in bounded perspective using the intersectional method.
Solution: The related views of the right parallelepiped are projected by the Monge´s Method. The optical axis is the line o = SH ׀׀ π, where its ground view o1 = S1H1 passes through the dominant part of the projected object, or the axis is directed on an architecturally interesting part of the projected object. The front view of the optical axis is o2 ׀׀ x1,2. If o2 is located above the front view of the object, the perspective is a bird´s–eye perspective, and if o2 is located under front view of the object, the perspective is a frog´s–eye perspective. It would be best to choose the heigh of o above the ground plane π and the distance 2m by the measuring scale, i.e. at eye level.
The vertical view plane ν is choosen in accordance with the requirements. The position of the eye S is determined by its related views S1, S2. The perspective view Ac of the point A is the intersection point of the projection line SA and the image plane ν. The related views Ac1 and Ac2 of the perspective view Ac are obtained. Ac is determined by coordinates u and w. It is not practical to construct the views of every points in such a way as it is done for point A.
67

H1
H
A1
A2 Ac
g
v
G
S1
S2
1U1
2U1
ν1
x1,2
u
u
w w 1Uc 2Uc
o2=h
cv
d
o1 Ac1
Ac2
d/2
Parallel lines S1U and S2U to the edges of the parallelepiped are intersecting the image plane ν in vanishing points 1U and 2U. 1U and 2U are the vanishing points of horizontal lines, therefore they lie on the horizon line h.
If the perspective is determined correctly, then the perspective view of the object lies inside of the circle of vision cv with radius r = d/2.
The previous construction can be abbreviated by modifying it.
Exercise 2: Find the view of the right parallelepiped in bounded perspective by the modified intersectional method.
2 H1
A1
Ac
g
S1
2U1
h
3
1Uc
G
H
cv
2Uc
1U1 ν1
d
4
w
Ac1
A2 l
o1
Solution: Axis o, centre S and image plane ν is choosen as in the previous Exercise 1. Only the ground view of the object is projected, with front view determined only by its altitude w. View Ac of the point A is the intersection point of the perpendicular to the horizon h passing through the point Ac1 and line A2H, where point Ac1 = A1S1 ∩ ν1. A2 lies on the line passing through the point A1 perpendicular to the line l ׀׀ h and on the l in the ditance zA = w. The
68

view of the object is constructed by using the vanishing points 1Uc and 2Uc. Only the part of the view of the object draw by full line is located inside the circle of vision cv.
Exercise 3: Find the view of a composed object in a bounded perspective by way of the contour method.
H1
A1
A2 Ac
g
S1
1U1
2U1
ν1=h1=g1
x1,2
1
d
u o2=h
2 I
II
III 1 2 I II III
1UcS2
G
H
cv
2Uc
o1
u
v v
Solution: In this method, the related views of the object are necessary to known. The image plane ν and the centre of projection S are determined in conformity with the principles of correct projection. 1U1, 2U1 are the vanishing points of edge directions of the projected object. Points 1, 2 and I, II, III are the intersection points of object edges with ground line g. In the right part of Figure is constructed view of the object base by using the intersection points of incident pairs of lines, where parallel lines have common vanishing points 1Uc, 2Uc on the horizon h. The heights of object are constructed by using its sizes in the front view of the object so that any vertical line is displaced from point 1Uc to the image plane.
Exercise 4: Find the view of a right parallelepiped in bounded perspective by way of the modified contour method
H1
A1
Ac
g
S1
2U1
1
h
2 I
1 2 I
II
1Uc
G
H
cv
2Uc
1U1 ν1
d
II
w
o1
69

Solution: The view of a right parallelepiped is constructed likewise in Exercise 2. The construction of the view Ac of the point A is displayed in Figure. It lies on the vertical line passing through the intersection point of the lines II1Uc ∩ 22Uc in altitude w of the object.
UNBOUNDED PERSPECTIVE
It is obvious from previous chapter, that views of complicated objects only by using methods of bounded perspective are very difficult to construct. Let us demonstrate some constructions in unbounded perspective, used in perspective design for any technical object before constructing its view by the methods of bounded perspective.
In unbounded perspective, the constructions based on central projection can be used. If the distance d is too big, then the distant circle cd is bigger then sheet of the paper. Consequently, we then constructing, the perspective view of any object is to be properly reduced.
H= scU
cd
sc
NsNa
acU
ac bc cc
dc
ec
h
g
In Figure are displayed the perspective views of lines in different positions:.
- line a lies in the ground plane in non-frontal position,
- lines b, c, s are underground lines (they are slope lines of ground plane and all horizontal planes),
- line e is vertical line (it is parallel to the image plane and perpendicular to the ground plane-frontal vertical line),
- line d is the line parallel to the image plane ν located in any horizontal plane (it is a frontal horizontal line).
Exercise 5: Find the size of the line segment AB in an unbounded perspective determined by horizont h, ground line g and distance d.
H
cd
h
g Na
acU
ac
So
cΔ
MΔ
Ac
Bc
A′ B′
rΔ
q Solution: If the line segment lies on the line in the ground plane π in non-frontal position, then, its measuring point MΔ lies on the horizon line h. The view of the line segment ccBA is
70

projected from the point MΔ onto the ground line g to the line segment BA ′′ , which determines the size of the line segment AB .
h
g
cU′
Ac Bc
A′ B′ A" B"
cU ′′
q
q If the line segment lies on the line in the ground plane π in frontal position, then the measuring point MΔ can be an arbitrary point on the horizon line h ( cU′ or cU ′′ ).
h
gAc
Bc
cLe D =M
Δ
A′ B′
H
cd
q Measuring point MΔ for underground lines is a distant point (right or left). There is the size of the line segment AB constructed on the underground line in the ground plane π (it is the slope line of ground plane π).
h
g
cU′
Ac
Bc
A′
B′
A"
B"cU ′′
q q
If the line segment AB lies on vertical line, then the measuring point MΔ can be an arbitrary point on the horizon line h. In Figure the measuring point for the line segment AB located on the vertical line is the point cU′ or cU ′′ .
Exercise 6: Divide the line segment into n identical segments in unbound perspective.
h
Ac Bc
1 2 3
1c2c3c
Cc
Dc
1′
2′
3′
c1′ c2′
c3′
4
4′
h
lc Ac
Bc
1 2 3 B′
1c2c
3c
Uc
Solution: If the line segment is in frontal position (segment AB lies on horizontal and CD on vertical line), their views can be divided into identical segments using an auxiliary line passing through the one endpoint of the line segment (Bc, Cc). The number of n identical segments of arbitrary size can be calibrated on this auxiliary line an the points 1,2,3,4
71

(1′,2′,3′,4′) are then obtained. The lines parallel to line 4Ac (4′Dc) passing through the points 1,2,3 (1′,2′,3′) can be constructed thus points 1c,2c,3c ( ccc 3,2,1 ′′′ ) are obtained.
If the line segment AB lies in any horizontal plane in non-frontal position, the division of the line segment ccBA can be constructed using an arbitrary frontal line l in the same plane, on
which the line segment ccBA can be projected from an arbitrary point Uc on the horizon line h. In Figure line lc is parallel to the horizon h and is passing through the point Ac. Points 1,2,3 divide the line segment BAc ′ into four identical line segments and lines Uc1, Uc2, Uc3
intersect the line segment ccBA in points 1c, 2c, 3c.
Identical line segments on the line in frontal position are projected into identical line segments ( |Bc1c| = |1c2c| = |2c3c| = |3cAc|, |Cc c1′ | = | c1′ c2′ | = | c2′ c3′ | = | c3′ cD′ | ), identical line segments on the line in non-frontal position are projected into non-identical line segments ( |Bc3c| < |3c2c| < |2c1c| < |1cAc| ).
Exercise 7: Let the line segment ccBA be the view of the line segment AB located in the
horizontal plane. Replace the size of the line segment AB on the vertical line bc
Solution: Let us project the line segment ccBA on the line segment BA ′′ on the horizontal line lc using the measuring point MΔ located on the horizon line h. Let us replace the size of
BA ′′ on the vertical line bc passing through the point A′ and thus the point Cc is obtained. Then size of line segment AB is identical to the size of the line segment AC .
cd
H h
lc
acU
ac
So
cΔ
MΔ
Ac=A′
Bc
B′
rΔ bc
Cc
Exercise 8: Find the view of a square determined by its AB side.
Solution: If the square lies in horizontal plane in non-frontal position, at first the view of half square constructed and then it can be expanded homothetically two times. The half side Ac/2Bc/2 can be constructed using homothety with centre H and ratio ½. The vanishing point of the side Ac/2Bc/2 is point AB/2
cU and the vanishing point of the half side Bc/2Cc/2 is point BC/2cU , where the rotated directional line of side Bc/2Cc/2 is perpendicular to the rotated
directional line of the half side Ac/2Bc/2, passing through the point So/2 ( rotated So/2 ∈ cd/2=cv ). The diagonal of an arbitrary square with one vertex in point So/2 and with two sides located on the lines So/2
AB/2cU , So/2 BC/2
cU intersect the horizon line h in the
72

vanishing point BD/2cU . The half square Ac/2Bc/2Cc/2Dc/2 can be constructed by using
vanishing points AB/2cU , BC/2
cU and BD/2cU and then expanded it homothetically to a full square
AcBcCcDc.
Ac
Bc
Cc
Dc
H
cd/2
So/2
hAB/2cU
Ac/2
Bc/2
Cc/2BD/2cU
BC/2cU
Ac Bc
Cc Dc
RDc/2H h
1
cv= cd/2
UDc/2
1′
cA ′
cB ′
cC′
cD′
If the square is located in the horizontal or vertical plane perpendicular to the image plane in frontal position (two opposite sides of the square are parallel to image plane), then, the second two opposite sides are the underground lines with the vanishing point in the main point H. The vanishing points of their diagonals are distant points (right and left or upper and lower). If the circle of vision has a radius d/2, then half distant points can be used. In Figure, only one distant point RDc/2 is used for construction of the AcBcCcDc square and UDc/2 for construction of the cccc DCBA ′′′′ square and points 1, 1′, the midpoints of the sides AcBc and ccBA ′′ .
Ac
Bc
Cc
Dc
H h
cv=cd/2
lc Ac/2Bc/2
Cc/2Dc/2
So/2
AB/2cU MΔ/2
A′/2
In Figure there is the view of a square constructed in the vertical plane, not perpendicular to the image plane in frontal position. The square is determined by view AcBc of the side AB. This side is homothetically reduced to ½ and the size of this side Ac/2Bc/2 can be replaced on the vertical line passing through the point Bc/2 and point Cc/2 can be obtained. The view of the square Ac/2Bc/2Cc/2Dc/2 can be constructed by using the vanishing point 2/AB
cU and then it can be expanded homothetically to the AcBcCcDc square.
Linear perspective frequently uses square nets which are composed from large number of little squares. Separate details of object projected in perspective to be constructed easily.
73

Exercise 9: Find the view of the square nets in the horizontal plane determined by one AB side of a square in frontal position.
Solution: If the square net is defined by two sides of squares in the frontal position, then the other sides are underground lines with a common vanishing point H. The vanishing points of the diagonals are distant points (right or left). Determining the circle of vision cv with radius d/2, the half distant points can be used. Then the point LeDc/2 is used for construction of the AcBcCcDc square (Exercise 8). The constructions of other nets in all cube faces is obvious from Figure. Such nets are used for drawing interiors.
Ac Bc
Cc Dc
LeDc/2 H
cd/2
h
Exercise 10: Find the view e of the square nets in the horizontal plane determined by the AB side of a square in non-frontal position.
Solution: The square net in horizontal plane is constructed by using a circle of vision with radius d/2. The first AcBcCcDc square is constructed by using Exercise 5.8. Sides AC, BC are projected from main point H onto the auxiliary frontal line lc as line segments Bc1, BcI and the size of the line segment is |Bc1| = |12| = |23| = …and |BcI| = |I II| = |II III|. Points 1,2,3 and I,II,III are projected from H into points 1c,2c,3c and Ic,IIc,IIIc. The diagonals of the square net have the common vanishing point in BD
cU , where |H BDcU | = 2 × |H BD/2
cU |.
Ac=Ic
Bc=0 Cc=1c
Dc
H
cd/2
So/2
lc
h
Ac/2
2c3c
IIc IIIc
2 3 1
AB/2cU
ABcU BD/2
cU BDcU
I II III
BC/2cU
74

Exercise 11: Find the view of the cube with one face in horizontal plane determined by view of its side AcBc in linear perspective determined by the main point H, horizon h and the circle of vision cd/2=cv.
Solution: The cube face AcBcCcDc is constructed as in Exercise 8. The size of half edge Ac/2Bc/2 is replaced on the vertical edge Ac/2 cA′ /2 and the half cube is constructed using the vanishing points AB/2
cU and AD/2cU . The half cube can be expanded 2 × homothetically to the
required cube. Only the edges located inside the circle of the vision are drawn in bold lines.
Ac
Bc
Cc
Dc
H
cd/2
So/2
h AB/2cU
B′/2Bc/2
MΔ/2ACcU
AD/2cU
Ac/2Dc/2
cA′
cB′cD′
cC′A′c/2
Exercise 12: Find the view of a prism with an oblong base in horizontal plane determined by the view of its side AcBc and the ratio of the sizes of its edges is a : b : c = 6 : 4 : 5 in linear perspective determined by the main point H, horizon h and the circle of vision cd/2.
H
So/2
BC/2cUBDUc/2 MΔ/2
4 6
Ac
Bc
cB′ /2
Bc/2
cB′
Cc/2
cC′
Dc
cA′
h
cv
1 2
3 4
5
AB/2cU
Ac/2
Cc
cD′ cC′ /2
BCcU
C′/2
A B a b
c
A′ B′
75

Solution: The construction of the view of the prism with a half oblong base is similar like to the construction of the oblong in Exercise 6. The 5/4 of the size of the side B/2C/2 is replaced on the vertical edge Bc/2 cB′ /2 by using the measuring point MΔ/2 of the line Bc/2Cc/2 (Exercise 7). Other vertices of the top base cA′ /2, cC′ /2, cD′ /2 can be constructed by using of the vanishing points AB/2
cU , AD/2cU , AC/2
cU .
The half prism can be expanded 2 × homothetically to the asked prism. Only the edges located inside the circle of vision are drawn by full line.
Exercise 13: Find the view of a composed object which is determined by its related views and it is located in the prism from Exercise 12.
Solution: The related views of the composed object are displayed in Figure on the right. This object is located in the prism with an oblong base. Its ground view is divided into 4 identical segments and the front view into 8 identical segments. The related views of the object are drawn in the oblong nets.
The perspective view of the prism is constructed by the way of Exercise 12. The edges of this prism are divided into n identical segments (Exercise 6), with n = 2 for every basic edges and n = 4 for every vertical edges of the prism. View of the composed object can be constructed by using of these oblong nets.
HBCcU
Ac=
Bc
cA′
cB′
cC′
cD′
h
cv
1 21′
2c
1c
2′
c1′ 2′c
=Cc
Dc
x1,2
76

Self-evaluation examples
1. In the unbounded linear perspective [h = x, H = 0, d = 16] construct the oblong in horizontal plane determined by the image of its side AB [As(1; -7,5), Bs(-6; -5)], and the ratio of the side sizes AB : BC = 4 : 3.
2. In the unbounded linear perspective [h = x, H = 0, d = 16] construct the image of the square nets in the horizontal plane determined by AB side of one square in frontal position [As(5; -5), Bs(3; -5)].
3. In the unbounded linear perspective [h = x, H = 0, d = 16] construct the image of a prism with an oblong base in horizontal plane determined by the image of its side AB [As(5; -4,5), Bs(-0,5; -7)] and the ratio of the sizes of its edges is a : b : c = 5 : 4 : 6.
4. In the unbounded linear perspective [h = x, H = 0, d = 16] construct the image of a prism with an oblong base in horizontal plane determined by the image of its side AB [As(1; -7,5), Bs(-6; -5)] and the ratio of the sizes of its edges is a : b : c = 4 : 3 : 5.
5. In the unbounded linear perspective [h = x, H = 0, d = 16] construct the image of the cube with a base in horizontal plane determined by the image of its side AB [As(-1; -7,5), Bs(5,5; -5)] and locate the object determined by sketch in it.
6. In the unbounded linear perspective [h = x, H = 0, d = 16] construct the image of a prism with an oblong base in horizontal plane determined by the image of its side AB [As(-5; -5), Bs(1; -7)] and the ratio of the edge sizes 4 : 2 : 5 and locate the object determined by the sketch in it.
7. In the bounded linear perspective construct the image of the composed object
determined by the sketch.
3
4
6
4
x1,2
3 4 3
4
6
4
x1,2
3 4
1/4
2/3
1/3
x1,2
1/4 1/4
2/3
1/3
x1,2
1/4
77

PLANAR INTERSECTION OF ELEMENTARY SOLIDS
Mission
The mission is to represent the basic principles of constructing the planar intersection of elementary solids.
Aims
1. Being able to view the planar intersection of a prism or a pyramid.
2. Being able to view the planar intersection of a circular cylinder.
3. Being able to determine the type of the curve formed by the intersection of the cone and the plane and to construct the section.
4. Being able to determine the true size of the section.
Planar intersection of a solid is representing by the set of common points of the solid and the plane σ. Its elements are intersection points of solid lines (edges) and plane σ.
Assume that the base solid is in the plane π. The base of the pyramid or cone and intersection figure (polygon or curve) located in the plane σ are related in the central collineation correspondence. The axis of collineation is the common line of the basic plane π and intersection plane σ, the centre of collineation is the main vertex V of the solid.
The base of a prismatic or cylindrical solid located in the ground plane π and intersection figure (polygon or curve) located in the intersection plane σ are related in the axial affinity correspondence with a common line of the planes π and σ as the axis of affinity. Direction of the solid edges (solid lines) determines the direction of affinity.
The pair of corresponding points is the point of the base polygon (curve) and the point of the intersection polygon (curve) located on the same solid lateral edge (line).
PLANAR INTERSECTION OF A PRISM AND A PYRAMID Plane σ, in a general position with respect to the pyramid or prism (if the intersection plane σ has no common vertex, edge or face with solid), intersects this solid in the polygon with vertices in the intersection points of the solid edges and the plane σ. The sides of the intersection polygon are the intersection line segments of the solid´s faces and the intersection plane σ.
The intersection polygon can be constructed by two methods:
1. Constructing the intersection figure through the intersection points of the solid edges (solid lines) with the intersection plane σ.
2. Using the collineation (pyramid) or affinity (prism) relationship between the solid base and intersection figure.
These two methods can be combined.
78

Planar intersection of a pyramid
Intersection plane σ, not vertex plane (not passes through the apex V), is cutting the pyramid in a form of polygon with vertices in the intersection points of the pyramidal edges with the intersecting plane σ, the sides of the polygon as the intersection line segments of the pyramidal faces by σ.
The intersection and basic polygons are related in the central collineation correspondence, with the axis of collineation as the intersection line of the planes π and σ, pσ = π ∩ σ. The centre of the collineation is the apex V of the pyramid. Vertices of the intersection and basic polygons are pairs of corresponding points in the central collineation.
Fig. a) illustrates the central collineation between basic and intersection polygons of right and Fig. b) of the oblique square pyramid. The collineation is determined by centre V, axis in the plane trace pσ = π ∩ σ and by pair of corresponding points S →⎯S, where S is centre of the square base located in the ground plane π and ⎯S the intersection point of the pyramidal axis o with intersection plane σ,⎯S = o ∩ σ.
Exercise 1: Find the related views (in Monge´s method) of the oblique pyramid with square base located in the ground plane π, determined by centre S, vertex A and point V as the apex. The pyramid is truncated by the intersection plane σ determined by its traces pσ, nσ.
Solution: The related views of the pyramid are constructed similarly as in Exercise 5, Chapter Monge´s method. In the next solution we use the third auxiliary views of the pyramid and of the intersection plane σ (their construction as in Chapter Monge´s method). The auxiliary plane κ is perpendicular to the ground plane π, κ ⊥ π and to the intersection plane σ, κ ⊥ σ, then the third view σ3 of the plane σ is a line. Reference line y1,3 = κ ∩ π is perpendicular to the round plane trace, y1,3 ⊥ σ
1p . The third view of the intersection polygon is the line segment 33 BD located on line σ3.
The ground views of the intersection points SDCBA ,,,, of the pyramidal edges AV, BV, CV, DV and pyramidal axis o with intersection plane σ are constructed by lines perpendicular to the reference line y1,3 ( 1k ⊥ y1,3 ) passing through the third views of these points (⎯S1 =S1V1 ∩ 1k,......) and their front views by lines perpendicular to the reference line x1,2 ( 2k ⊥ x1,2 ) passing through the ground views of the intersection points (⎯S2 =S2V2 ∩ 2k,......).
A B
C D
S
A
B
C
D
S
V o
σ
π
pσ
1=1
2=2
3=3
4=4
b)
A B
C D
S
A
B
C D
S
V o
σ
π
pσ
1=1
2=2
3=3
4=4
a)
79

The ground view of the basic square 1111
DCBA and the intersection quadrilateral
1111 DCBA are related in the central collineation with axis σ1p , centre V1 and the pair of
corressponding points S1 →⎯S1. This collineation can be used to verify the construction of the 1111 DCBA polygon.
A1
B1
C1
D1
S1
A2 B2 C2 S2 D2
N2
V3
σp1
A1
B1
C1
D1
S3
A2
B2
C2
D2
S2
x1,2
σ2n
P1=P3
A3
σ3 y1,3
B3
C3
D3
A3
D3
C3
B3
V2
N1
S3
N3
V1
1k
2k
S1
1=1
Exercise 2: Find the related views of the right hexagonal pyramid with the base located in the ground plane π and determined by centre S, vertex A and by the solid´s height denoted as v. The pyramid is truncated by the intersection plane σ determined by its traces pσ, nσ. Find the true size and shape of the intersection hexagon.
Solution: The related views of the pyramid are constructed as in Chapter Monge´s method. The third auxiliary view of the solid is constructed as in Exercise 1. The line segment 33 DA located on the line σ3 is third view of the intersection polygon. The ground and front views of intersection points SF,EDCBA ,,,,, are constructed similarly to Exercise 1. The principal line of the 2nd frame 2hσ is used to verify the construction of the front image of the intersection polygon.
The true size and shape of the intersection hexagon can be constructed by revolving the intersection plane σ to the ground plane π about its plane trace pσ as in Exercise 3, Chapter Monge´s method.
80

A1
B1
C1
D1
E1
S1=S1
A2 B2 C2 S2=N1 D2E2
N2
1P′
V3
σp1
1=1
2=2
A1
B1
C1
D1
E1
S3
A2
B2
C2 D2
E2 S2
o2
x1,2
σ2n
P1=P3
F1
F1
3=3
4=4
σ1
2h
σ2
2h
2P′
A3
F2
1P ′′
(S)
So
Ao
Bo
Co
Do
Eo
Fo σ3
y1,3
B3
C3
D3
E3
F3
S3
A3
D3C3E3
B3 F3
V2
Planar intersection of a prism Plane σ is intersecting a prism in form of a polygon with vertices in the intersection points of prismatic edges in the general position. The sides of the polygon are the intersection line segments of the prismatic faces with the intersection plane σ.
A B
C D
S
A
B
C
D
S
S′ o
σ
π
pσ
1=1
2=2
3=3
4=4
b)
A B
C D
S
A
B
C
D
S
S′ o
σ
π
pσ
1=1
2=2
3=3
4=4S
a)
81

The intersection and basic polygons are related in the axial affinity correspondence. The axis of affinity is the intersection line of the planes π and σ, pσ = π ∩ σ. Direction of the affinity is determined by direction of the prismatic axis o, vertices of the intersection and basic polygons are pairs of corresponding points in the axial affinity.
The axial affinity relation between the intersection and basic polygons of the right prism is illustrated in Fig. a) and of the oblique square prism in Fig. b). Affinity is determined by an axis in the plane trace pσ = π ∩ σ and a pair of corresponding points S →⎯S, where S denotes centre of the square base located in the ground plane π and ⎯S the point of the prismatic axis o intersected by plane σ,⎯S = o ∩ σ.
Exercise 3: Find the related views of the right pentagonal prism truncated by plane σ determined by its traces pσ, nσ. Pentagonal base located in the ground plane π is determined by centre S , vertex A and solid´s height v.
A1=A1
B1=B1
C1=C1D1=D1
S1=S1
A2 B2
B2
A2
C2
C2
D2
D2
E2
E2
S2
S2
P2
P1
x1,2
σ1
2h
σ2
2h
σ1p
σ2n
o2
E1=E1
Solution: The related views of the right pyramid are constructed as in Exercise 4, Chapter Monge´s method. The ground images of the vertices of basic pentagon and vertices of the intersection pentagon are identical 11 AA = , 11 BB = , ....... The front images of the vertices of the intersection pentagon can be constructed by using the principal lines of 2nd frame 2hσ.
82

Exercise 4: Find the related views of the oblique pentagonal prism truncated by plane σ determined by its traces pσ, nσ. Pentagonal base located in the ground plane π is determined by centre S , A and centre of the top base S′.
Solution: The basic pentagon ABCDE of the prism is located in the ground image plane π whereas intersection pentagon is located in the intersecting plane σ. They are related in the axial affinity correspondence. Axis of affinity is trace pσ of the plane σ (pσ = σ ∩ π), and direction of affinity determined by the direction of the solid axis o. It is necessary to construct each pair of corresponding points.
A1
N1
B1
C1
D1
E1
S1
A2 B2 C2S2 D2 E2
N2
2S′
P1
1S′
σ2n
σp1
1=1
2=2
4=4
5=5
A1
B1
C1
D1
E1
S1
A2
B2 C2
D2
E2
S2
3=3
o1
l1
o2=l2
x1,2
Let the related views of the prism are constructed. We construct the intersection point S of the axis o and intersection plane σ by using the cover line l now (l2 = o2 = P2N2, l1 = P1N1,
111 loS ∩= , 22 oS ∈ ).
After constructing the point S we costruct the ground view 11111 EDCBA of the intersection pentagon as a corresponding to the basic pentagon
11111EDCBA in the axial
affinity (axis – σp1 , pair of corresponding points S1 →⎯S1). The front view of the intersection polygon 22222 EDCBA can be constructed using lines perpendicular to the reference line x1,2 and passing through the vertices of the ground view 11111 EDCBA of the pentagon.
83

PLANAR INTERSECTION OF A CONE AND A CYLINDER The plane σ in general position with respect to the cone or cylinder intersects these solids in conic sections.
The intersection curve can be constructed by two methods:
1. Using the affinity (cylinder) or collineation (cone) relationship between the solid base and intersection figure.
2. Constructing the points of the intersection curve as the intersection points of the solid lines with the intersection plane σ (using the auxiliary projection plane κ perpendicular to the solid basic plane π, κ ⊥ π and to the intersection plane σ, κ ⊥ σ).
These two methods can be combined.
Planar intersection of a cylinder
The intersection curve (ellipse or circle) and the basic circle are related in the axial affinity correspondence, with the axis of affinity as the intersection line of planes π and σ, pσ = π ∩ σ. Direction of the affinity is determined by the direction of the cylindrical axis o, points of the intersection curve and the basic circle as pairs of corresponding points in the axial affinity.
Fig. b) illustrates the axial affinity between basic circle and intersection ellipse of the right cylinder and Fig. b) of the oblique circular cylinder. The affinity is determined by the axis in the plane trace pσ = π ∩ σ and by the pair of corresponding points S →⎯S, where S is centre of the basic circle located in the ground plane π and ⎯S as the point where the cylindrical axis
A B
C
D S
A
BC
D
S′
o
σ
π
pσ
1=1
S
b)
A B
C
D
S
A
BC
D
S′
o
σ
π
pσ
1=1
2=2
S
1T
2T
2T
1T
a)
84

o is intersectied by plane σ,⎯S = o ∩ σ. Two related diameters BA , DC of the intersection ellipse correspond to two perpendicular diameters AB, CD of the basic circle. The points of the contour lines of the cylinder tangent to the basic circle and the intersection ellipse are pairs of corresponding points in the axial affinity.
Exercise 5: Find the related views of the right circular cylinder truncated by plane σ, determined by its traces pσ, nσ. The basic circle located in the ground plane π is determined by the centre S and radius r. The height of solid is v. Determine the true size of the intersection ellipse.
A1
A2
B1
B2
C1
D1
C2 D2
Ao
Bo
Co
Do
So
S1=S1
A3
S3=C3=D3
B3
11=11
21
31
41
51
61
Q′1
Q2
2Q′
N1
N2
N3
12
22
32
42
52
62
S2
13=53
23=43
33
63
Q3
Q′3
S3 σ1
1s
x1,2
σ3
13 sσ =
o2
o3
P1=P3
S2
σ1p
σ2n
Q1
z1
σ3o= y1,3
z1
13
12
σ1
1h
B3o
S3o=C3o=D3o
A3o
σo
1h
σo
1s
Solution: The related views of the right circular cylinder are constructed as in Exercise 6, Chapter Monge´s method. The intersection plane is determined by its traces σ
1p , σ2n . Let us
construct the third auxiliary view of the cylinder and the third image σ3 of intersection plane σ, where the third projection plane is perpendiculat to the ground plane, κ ⊥ π and to the intersection plane κ ⊥ σ. Therefore, the third view σ3 of the intersection plane σ is a line. Reference line y1,3 = κ ∩ π is perpendicular to the ground plane trace of the plane σ, y1,3 ⊥ σ
1p . The third view of the intersection ellipse is the line segment 33 BA located on the
85

line σsσ 31
3 = with the end points mapped to the major vertices of the intersection ellipse. The
third view of the main axis of the ellipse is located on the principal line of the first frame σh1
passing through the centre of the intersection ellipse 3S as the centre of the line segment 33 BA . Points 333 DCS == are the third views of the minor vertices located on the principal
line of the first frame of plane σ.
The ground views of the vertices 1111 DCBA ,,, of the intersection ellipse are located on the ground view of the basic circle and on the ground views of the principal and slope lines of the first frame σ
11 h , σ
11 s , and the ground view of the centre⎯S1 = S1. The front views of the
vertices 2222 D,C,B,A can be constructed by lines perpendicular to the reference line x1,2 passing through the points 1111 DCBA ,,, , in the distances identical with z – coordinates of the same points from their third images.
The ground view of the intersection ellipse is identical to ground view of the basic circle. Front view of the intersection ellipse is determined by the related diameters 22 BA , 22 DC and can be constructed using the pointing method. Let us choose any solid lines and on this lines points of the intersection ellipse as 61..... can be determined.
Points 2Q , 2Q′ are the tangent points of the front view of the intersection ellipse and contour lines of the solid. They are the front views of the points Q1, 1Q′ , which are the end points of the diameter of the basic circle parallel to the reference line in the distances identical to their z-coordinates.
The true size of the intersection ellipse can be constructed by revolving the intersection plane σ into the ground plane π about the plane trace pσ. This ellipse is determined by major vertices oo B,A and minor vertices oo D,C and can be constructed using the hyperosculating circles.
Planar intersection of a cone Plane σ, which is not vertex plane of a circular cone, intersects this cone in a conic section. The type of conic section is determined by the form of the intersection figure by the vertex plane σ′ parallel to the intersection plane σ.
The curve created by the intersection of the cone and the plane σ is:
• Ellipse, if the intersection figure of the plane σ′ ׀׀ σ with cone is a point (Fig.a);
V o
Vo
V
o
σ
σ σσ′ σ′ σ′
a) b) c)
86

• Parabola, if the intersection figure is a line parallel to one surface line of the cone (Fig.b);
• Hyperbola, if the intersection figure is a line non parallel to one surface line of the cone (Fig.c).
A
B
C
D
S
B
A
C
D
V
o
σ
π
pσ
1=1
2=2
1T2T
2T
S
3=3
1T
Ω
Ω
There is illustrates the central collineation existing between basic circle and the intersection ellipse of the right circular cone at the Figure. The collineation is determined by the centre V, the axis in the plane trace pσ = π ∩ σ and by a pair of corresponding points S →⎯S, where S is centre of the basic circle located in the ground plane π and ⎯S the point on the conical axis o and intersected plane σ,⎯S = o ∩ σ. Two perpendicular diameters of the circle and two related diameters of the ellipse are related in collineation correspondence.
Exercise 6: Find the related views of the right circular cone truncated by the plane σ, determined by its traces pσ, nσ. Basic circle located in the ground plane π is determined by centre S and radius r. Solid height is v. Determine the true size of the intersection ellipse.
Solution: The related views of the right circular cone is constructed as in Exercise 6, Chapter Monge´s method and the intersection plane is determined by its tracees σ
1p , σ2n . Let us
construct the third auxiliary view of the cone and the third view σ3 of the intersection plane σ, where the third projection plane is perpendicular to the ground plane, κ ⊥ π and to the intersection plane, κ ⊥ σ. Therefore, the third view σ3 of the intersection plane σ is a line. The reference line y1,3 = κ ∩ π is perpendicular to the ground plane trace, y1,3 ⊥ σ
1p . The third
view of the intersection ellipse is the line segment 33 BA located on the line σsσ 31
3 = with the end points mapped into the major vertices of the intersection ellipse. The third view of the major axis of the ellipse is located on the principal line of the first frame σh1 passing through
the centre of the intersection ellipse 3S as the centre of the line segment 33 BA . Points 333 DCS == are the third views of the minor vertices located on the principal line of the
first frame of the plane σ.
The ground view of the major vertices of the intersection ellipse 11 BA , is located on the slope line σ
11 s whereas the minor vertices 11 DC , on the principal line σ
11 h of the intersection
plane and pass through the view of the centre of the ellipse⎯S1 = σ1
1 h ∩ σ1
1 s . The front views
87

of these vertices can be constructed by lines perpendicular to the reference line x1,2 and by the front views of the cone lines.
A1
B1
C1
S1=V1
A3
S3=C3=D3 B3
41
N3 53=73 33=93 23
S3
σ1
1s
x1,2
σ3
13 sσ =
o2
o3
P1=P3
S2=N1
σ1p
σ3o= y1,3
D1 51
63
12
N2
22
32
σ1
1h
A3o
B2
Ao
Bo
Co
Do B3o
S3o=C3o=D3o
σ2n
D2
S1
11
21
31
41 51
61
71
81
91
71
91
21
31
72
53=73
43=83
33=93
23 13
22 32 42 52 72 82 62
A2
52
C2
92
S2
V3
V2
So
σo
1h
σo
1s
Ground view of the intersection ellipse can be constructed using the hyperosculating circles or by way of the pointing construction. The front view of the ellipse is determined by the pair of related diameters 22 BA , 22 DC and can be constructed by way of the pointing method.
Points 22 72 , are tangent points of the front view of the ellipse and of contour lines of the cone. We can construct their front images using the third views of lines 2V, 7V.
The true size of the intersection ellipse can be constructed by revolving of the intersection plane σ into ground plane π about plane trace pσ. This ellipse is determined by both the major
oo BA , and minor vertices oo D,C and can be constructed using the hyperosculating circles.
88

Exercise 7: Find the related views of the right circular cone truncated in a parabola by the plane σ, determined by its ground trace pσ. The basic circle located in the ground plane π is determined by centre S and radius r. Solid height is v. Determine the true size of the intersection parabola.
A1
S1=V1
A3
51
N3 33=43
13=23
S3
σ1
1s
x1,2
σ3
13 sσ =
o2
o3
P1=P3
S2
σ1p
σ3o= y1,3
Q1
41
53
12
N2
22
32
A3o
Ao
σ2n
51
11
11
21
31
12
13=23
33=43
53
61
32=62 42 22
A2 52
Q2
42
V3
V2
σo
1s
N1
1Q′
2Q′
21
31
41
1o 3o
2o
4o
σ2
1s
Solution: The related views of the cone are constructed as in Exercise 7 with the intersection plane determined only by its ground plane trace pσ. The auxiliary plane κ is perpendicular to the ground view plane and to the intersection plane, κ ⊥ π, κ ⊥ σ. The reference line y1,3 = κ ∩ π is perpendicular to the ground plane trace, y1,3 ⊥ σ
1p . The third view σ3 of the intersection plane σ is parallel to one contour line of the cone because the intersection curve is a parabola. The front plane trace σ
2n can be constructed by an arbitrary point N3 ⊂ σ3 using its z–coordinate.
The line segment 33PA on the line σ3 is the third view of the intersection parabola. Its axis is
located on the slope line 3σ3
1 σs = and point 3A the vertex of the parabola. The parabola can
89

be constructed by pointing construction, where its points are located on any cone lines (Exercise 7).
The parabola is passing through the points Q,Q′ in which the plane σ intersects the basic circle. Tangent point of the front view of the parabola and contour line denoted as 25 .
Let us draw the related views of the truncated cone where intersection parabola is visible in ground and front views too. The contour of the ground view of the cone is a circular arch of the basic circle bounded by points Q1 1Q′ and line segment 1QQ1 ′ . The contour of the front view of the cone is part of the contour line, part of the intersection parabola and line segment on the reference line x1,2.
The true size of an intersection parabola can be constructed by revolving the intersection plane σ into the ground plane π about the plane trace pσ. The parabola is determined by vertex
oA and by points oooo 4321 ,,, .
Self-evaluation examples
1. Find the related views (in Monge´s method) of the oblique pyramid truncated by the intersection plane σ(9; 6,5; 7), with its square base located in the ground plane π determined by centre S(-5; 6; 0) and vertex A(-6; 3,5; 0) and point V(2; 4; 8) as the apex. Determine the true size of the section.
2. Find the related views (in Monge´s method) of the right pentagonal pyramid truncated by the intersection plane σ(9;9;4), with its base located in the ground plane π determined by centre S(0;4;0) and vertex A(-2;2;0) and the solid´s height is v=6. Determine the true size of the section.
3. Find the related views of the oblique prism truncated by plane σ( -6 ; 7 ; 6 ) with its square base located in the ground plane π and determined by centre S(5; 4; 0) and vertex A(4; 1; 0), centre of the top base is S′( -5 ; 6 ; 8 ). Determine the true size of the section.
4. Find the related views (in Monge´s method) of the right hexagonal prism truncated by the intersection plane σ(-11;9;3), with its base located in the ground plane π determined by centre S(0;4;0) and vertex A(0;0,5;0) and the solid´s height is v=6. Determine the true size of the section.
5. Find the related views (in Monge´s method) of the right circular cylinder truncated by the intersection plane σ(-11;9;3), with its base located in the ground plane π determined by centre S(0;4;0), radius r = 6 and the solid´s height is v=7. Determine the true size of the section.
6. Find the related views of the right circular cone truncated by the plane σ(-7; 15; 3,5), basic circle located in the ground plane π is determined by centre S(1; 5; 0) and radius r = 4, solid height v = 7. Determine the true size of the section.
7. Find the related views of the right circular cone truncated in a parabola by the plane σ(-4; 4; ?), the basic circle located in the ground plane π is determined by centre S(2; 5; 0) and radius r = 4, solid height as v = 7. Find the true size of the intersection parabola.
90

SURFACES
Mission
The mission is to represent the basic classification of surfaces according to their formation and forming elements and detailed description of the characteristics of surfaces of revolution.
Aims
1. Being able to classify the surfaces according to basic criteria.
2. Being able to characterize surfaces of revolution.
3. Being able to construct planar sections of surfaces of revolution.
Surface is a three-dimensional collection of points dividing a three-dimensional space into two regions. Definition of the surface in terms of kinematic geometry may be as follows:
Surface is generated by continuous motion of a curve (surface) where, at the same time, the shape of the curve (surface) can be according to a certain rule change continuously. Classification of the surfaces is characterized by various criteria.
By the type of forming line we resolve for example:
linear surfaces created by moving a straight line,
circular surfaces created by the circle movemen,t etc.
By the type of motion performed with forming curve we can distinguish:
surfaces of revolution ceated by rotating a curve (surface) around a straight line,
helical surfaces created by a helical movement of a curve (surface),
translation surfaces created by a translation of forming curve along the determining curve, etc.
Some surfaces are generally determined by network of data points, supplemented in some cases by the touch vectors. Shape of these surfaces can be generated using interpolation or approximation spaces.
Next, we will further deal with the surfaces which are most commonly occur in the building practice.
SURFACES OF REVOLUTION Definition A surface of revolution is a surface in Euclidean space created by rotating a curve line q (the generatrix) around a straight line o (the axis).
91

A such surface may also be formed by rotation of another surface around an axis o.
Each point K of the curve q moves on a circle k, which lies in a plane perpendicular to the rotation axis and its center S is on this line. The circle will be called as the circle of latitude. Endpoints of the generatrix create base circles kD, kH.
The intersection of the surface of revolution with the plane passing through its axis is called a meridian m consisting of two identical curves symmetrical with respect to the axis o. Rotation of the meridian m forms the same surface than rotation of the line q. The meridian incident with a plane ν‘ parallel to the plane ν is called the principle meridian. Through each point K on the surface of revolution passes one circle of latitude and one meridian. Circle, which has the largest radius in its neighborhood, is called the equatorial circle. Circle, which has the smallest radius in its neighborhood, is called the neck circle.
o
k K
q
S
o
kK
qkD
kH
S
o
kK
q
S
kD
kH
o
k K
m
r
q
kD
kH
o
q
o
q
92

View of a surface of revolution We'll show a projection of surfaces of revolution in Monge's projection in the following. Surface will be positioned so that its axis o is perpendicular to the ground plane π (hence parallel to the frontal plane ν). We assume that the surface is determined by the axis o and the major meridian m.
Exercise 1: Find the related views (in Monge´s method) of the surface of revolution determined by its axis o perpendicular to the ground plane π and the meridian m incident with a plane ν‘ parallel to the plane ν.
Solution: The ground view of the axis o is the point o1, the front image of this line is the line o2 perpendikular to the reference line x1,2 (Fig. a).
First we construct a front view of surface. Second view m2 of meridian is created of two identical curves symmetrical with respect to the axis o2. Endpoints P, Q of the generatrix create base circles kP, kQ, whose second projections are the line segments P
2k , Q2k parallel to
the reference line x1,2. The curves m2 together with line segments P2k , Q
2k form the front view of the given surface of revolution.
Projected onto the ground plane π it is necessary to construct all required circles: base circles, equatorial circles and neck circles. The ground view of base circle created by the point P is
o2
m2
o1
x1,2
o2
m2
o1
P2k
x1,2
Q2k 2Q
2P
o2
m2
o1
P2k
x1,2
P1k
Q1k
Q2k2Q
1Q
2P
1P ν‘o1
m1
o2
m2
o1
P2k
m1
x1,2
h1
h2
r2
r1P1k
Q1k
Q2k
1R
2R
1H
2H
2Q
1Q
2P
1P ν‘
a) b) c) d)
93

the circle P1k with the centre 1o and radius 11Po=Pr , the top base circle created by the point
Q is the circle Q1k with the centre 1o and radius 11Qo=Qr . The point R having the largest
distance from the axis o creates the equatorial circle r, the point H having the smallest distance from the axis creates the neck circle h. The ground views of these circles are the circles 1r , 1h with the centre 1o . The ground view of the surface of rotation is the circular ring betveen the circles 1r , 1h .
Planar intersection of a surface of revolution
Planar intersection of a surface is representing as a set of common points of the surface and intersecting plane σ.
The intersection curve we will construct as a set of points arising as intersections of circles of latitude and intersecting plane. We will use auxiliary image plane for it.
Exercise 2: Find the related views of the surface of revolution determined by the axis o perpendicular to the ground plane π and by half of the principle meridian m. Truncate the surface by the intersection plane σ determined by its traces pσ, nσ [ ( )0;5;01o ,
( )5,3;7;5,5σ ].
o2
35 mm
S2
35 mm
10 mm
o1
o1
A1
T´1
T1
Q2
σp1
σ1
2h y1,3
N1
N2
o2
A2
A3 N3 L3=K3=P1=P3 T3=T´3
o3
σ1
1s
m2
P2
P1
S2
rk
rk
k1
k2
k3
13=1´3
1´1
11
K1
L1
L2K2
T2
T´2
12 1´2
σ2n
σ2 h2
σ3
94

Solution: The related views of the surface are constructed as in Excercise 1. The front view of the surface is formed by front views of the meridian m2 and the base circles. The ground view is determined by the ground views of the equatorial and base circles.
In the next solution we use the third auxiliary views of the surface and of the intersection plane σ (their construction as in Chapter Monge´s method). The auxiliary plane κ is perpendicular to the ground plane π, κ ⊥ π and to the intersection plane σ, κ ⊥ σ, then the third view σ3 of the plane σ is a line. Reference line y1,3 = κ ∩ π is perpendicular to the ground plane trace, y1,3 ⊥ σ
1p . The third view of the surface is the figure identical to front view of it. The third view of the intersection curve is the line segment 3AP3 located on line
σ3. The point 3A is the view of the highest point and 333 LKP == nethermost point of the cut curve.
The point A is located on the slope line σ1 s passing through the axis o. Its ground view 1A
is the intersection of a line σ1
1 s and a line passing through 3A perpendicular to y1,3. The front
view 2A can be constructed using the principal line of the first frame σh1 . The points K, L are laying on the base circle, their ground views 1K , 1L therefore are the intersections of the trace σ
1p and the ground view of the base circle, the front views 2K , 2L are on the reference line 1,2x .
Any other point of the intersection curve we can view using a circle of latitude. Let us denote 33 II ′= the random point of the line segment 3AP3 . This point is the third view of two
points I , I′ of the intersection curve lying on one circle of latitude k. The third view of circle k is the line segment 3k parallel to 1,3y . Its ground view is the circle 1k with the centre
1o and radius 2/3k=kr . The ground views 1I , 1I′ of the intersection points are the
intersections of the circle 1k and a line perpendicular to y1,3 passing through 33 II ′= . The front views of these points can be constructed using the front view 2k of the circle k or the principal line.
In solving the problem it is always need to look for the intersection points lying on the contour of the surface. In the ground view, in this case, there are the points T , T′ lying on the equatorial circle. In the front view there is one point Q lying on the principle meridian. The front view 2Q of this point we construct using the principal line of the second frame
σh2 , whose ground view σh12 passes through the point 1o parallel to the reference line 1,2x
and the front view is parallel to the trace σ2n .
QUADRATIC SURFACES OF REVOLUTION Definition Regular quadratic surfaces of revolution can be created by revolving the conic section about its axis.
Based on the definition we distinguish the following quadrics:
95

1. A sphere, which is created by revolving the circle about its diameter.
2. A spheroid, or ellipsoid of revolution, which is obtained by revolving an ellipse about one of its principal axes.
A prolate ellipsoid is formed by revolving an ellipse about its major axis, an oblate elipsoid by revolving an ellipse about its minor axis.
a) b)
3. A paraboloid of revolution is a surface obtained by revolving a parabola around its axis.
4. A hyperboloid of revolution is obtained by revolving a hyperbola about one of its principal axes. A two-sheet hyperboloid of revolution is formed by revolving a hyperbola about its major axis, an one-sheet hyperboloid of revolution by revolving about its minor (imaginary) axis. Revolving asympthotes of the basic hyperbola about the axisan asympthotic conical surface of revolution is created.
a) b)
Planar intersection of a quadratic surface of revolution
Planar intersection of surface we will construct in Monge's projection. Surface will be positioned so that the axis o of revolution is perpendicular to the ground plane π.
Planar intersection of the quadratic surface of revolution is in the form of the conic. The conic type depends on the type of surface and the position of the intersecting plane with respect to the axis of revolution.
Τhe following table shows the projections of individual types of quadrics and types of intersection curve on these surfaces.
Type of surface Related views Type of intersection curve
Sphere
circle
96

Ellipsoid of revolution
prolate oblate
a) circle if σ⊥ o
b) ellipse if oσ ⊥
Paraboloid of revolution
a) circle - if σ⊥ o
b) parabola - if σ׀׀o
c) ellipse - if σ is not a) or b)
Hyperboloid of revolution
two-sheet one-sheet
a) circle
b) parabola
c) ellipse
d) hyperbola (the same type as on the asympthotic cone –see Chapter 7)
Exercise 3: Find the related views of the oblate ellipsoid determined by the axis o perpendicular to the ground plane π and by the forming ellipse m. There are known the center S and the lengths a, b of semi-axes of the ellipse. Truncate the ellipsoid by the intersection plane σ determined by its traces pσ, nσ [ ( )3;4;0S ; a=3,5; b=2,5,
( )4;7;5,5σ ].
97

S2
S1o1=S1
A1
2T1
1T1
D1
2Q2
1Q2
σ2n
σp1
σ2
2h
σ1
2hy1,3
N1
N2
o2
A2
B2
C2
D2
C1
B1
S3=C3=D3
A3
B3 σ3 N3
P1=P3
1T3=2T3
o3
σ1
1s
m2
S2
P2
P1
S3 rk
rk
k3
k1
Solution: The first we will construct projections of the point S and the axis of revolution o ( 11 So = , 1,22 xo ⊥ ). The front view of the ellipsoid is the ellipse 2m with the center 2S , whose minor axis is located on the line 2o . The ground view is determined by the ground view of the equatorial circle (radius = a).
The intersection plane σ is determined by its traces pσ, nσ. It follows from their related views that the ellipse is the intersection curve. Similarly to Example 2 we use to solve auxiliary image plane κ perpendicular to the ground plane π and to the intersection plane. Reference line y1,3 = κ ∩ π is perpendicular to the ground plane trace, y1,3 ⊥ σ
1p . The third view σ3 of the plane σ is a line, the third view of the ellipsoid is the ellipse identical to its front view. The third view of the intersection curve is the line segment 3AB3 located on line σ3. The point
3A is the view of the highest point and 3B nethermost point of the intersection ellipse. The
midpoint 333 DCS == of the segment 3AB3 is the third view of its center. The points A ,
B , C , D are vertices and the lines BA , DC are the axis of the intersection ellipse mapped to the principle and slope line of the first frame in the intersection plane.
The points A , B are located on the slope line of the first frame σ1 s passing through the axis
o. Their ground views 1A , 1B are on the line σ1
1 s , their front views can be constructed using the principal lines of the first frame.
The points C , D are located on the principal line of the first frame and lie on one circle of latitude k. The third view of circle k is the line segment 3k parallel to 1,3y . Its ground view is
98

the circle 1k with the centre 1o and radius 2/3k=kr . The ground views 1C , 1D of the intersection points are the intersections of the circle 1k and a line perpendicular to y1,3 passing through 333 DCS == . The front views of these points can be constructed using the principal line.
The ground view of the intersection elipse determined by the axis 11BA , 11DC we can draw using hyperosculating circles. In the front plane axis and vertices of the intersection ellipse can be constructed by the Rytz method, or it is possible to construct a few random points through circles of latitude. It is shown in Example 2.
Ground view of the intersetion is tangent to the contour of the ellipsoid in the ground plane in the points 1
1 T , 12 T . The front of the intersetion is tangent to the contour of the ellipsoid in
the front plane in the points 21 Q , 2
2 Q . These four points can be constructed in the same method as in Example 2.
Method of constructing an elliptical intersection of a paraboloid and hyperboloid of revolution is the same as in Example 3.
Exercise 4: Find the related views of the paraboloid of revolution determined by the axis o perpendicular to the ground plane π and by the forming parabola m. There are known the vertex V and the focal parameter p of the parabola. Truncate the paraboloid by the intersection plane σ determined by its trace pσ in the parabola [ ( )5;5;0V ; p=2;
( )?;7;6−σ ].
Solution: After projection of the point V and the axis of revolution o ( 11 Vo = , 1,22 xo ⊥ ) we wil construct the front view of the paraboloid. Its contour is the parabola 2m with the vertex
2V , axis 2o and focal parameter p which will be constructed using the pointing construction described in Chapter 1.
The ground view is bounded by the ground view of the base circle (radius = rb).
The intersection plane σ is determined by its trace pσ and at the same time we know that the intersection curve should be a parabola. This occurs in the case where the intersection plane σ is parallel to the surface axis.
Plane σ is thus perpendicular to the ground image plane π and so its trace line nσ is perpendicular to the reference line 1,2x . Ground view of the intersection parabolic segment is
a line segment 11LK . End points are ground views of the intersection points of the base circle on the paraboloid with the trace pσ. Their front views lie on the line 1,2x .
Axis of the intersection parabola is the slope line σ1 s in the intersection plane (parallel to the
surface axis), intersection point of this line and surface is the vertex A of the intersection parabola. The ground view 1A is the midpoint of the segment 1LK1 , the front view 2A we construct using the circle of latitude k. Other points of the intersection curve (1 , 2 , 3 , 4 ) be constructed in the same way using circles of latitude as is shown in Example 2.
99

V1=o1
11
21
k1
x1,2
σ1p
σ2n
V2
A1 = σ1
1s =op1
12
22
f
A2
o2
m2
F2 k2
l1
l2
Q1
Q2
K1
K2
L1
L2
31
41
32
42
op2
rb
rb
m1
Intersection plane σ intersects the principle meridian m in the point Q. The ground view 1Q of it is the intersection point of the lines σ
1p and 1m , the front view 2Q lies on the 2m . This point is the tangent point of the intersection parabola and contour of the surface in the frontal image plane.
Exercise 5: Find the related views of the one-sheet hyperboloid of revolution determined by the axis o perpendicular to the ground plane π and by the forming hyperbola m. There are known the center S and the lengths a, b of semi-axes of the hyperbola. Truncate the hyperboloid by the intersection plane σ determined by its traces pσ, nσ.
Solution: The front view of the hyperboloid is the hyperbola 2m with the minor axis 2o and the center 2S . It will be constructed using the pointing construction described in Chapter 1. The ground view is the circular ring bounded by the ground views of the neck circle 1h and base circle P
1k .
According to the position of the traces pσ, nσ it is evident that the ellipse will be intersection curve of the hyperboloid. Elliptic intersection of the hyperboloid of revolution can be constructed in the same way as the elliptic intersection of the ellipsoid of revolution in the Exercise 3.
100

o2
N2 σ2
2h
σ2n
2S
21Q
2A
2B
2C2D
S2
2P′ x1,2
1P′
σ1p
σ1
1h
σ1
1s
σ1
2hy1,3
σ3
N3 3A
3BP1=P3
o3
333 DCS ==13=23
1S
1C
1D
1A
1B
11
21
12 22
1T1
12T
S1
N1
m2
32
31 TT =
h1P1k
22 Q
Self-evaluation examples 1. Find the related views of the surface of revolution
determined by the axis o perpendicular to the ground plane π and by half of the principle meridian m (see Fig.). Truncate the surface by the intersection plane σ determined by its traces pσ, nσ [ ( )0;5,4;01o , ( )7;12;10σ ].
2. Find the related views of the oblate ellipsoid determined by the axis o perpendicular to the ground plane π and by the forming ellipse m. There are known the center S and the lengths a, b of semi-axes of the ellipse. Truncate the ellipsoid by the intersection plane σ determined by its traces pσ, nσ [ ( )5,3;5;0S ; a=5; b=3; ( )5;8;7−σ ].
x1,2
o2
r = 80 mm2S2
40 mm
1S2 40 mm
m2
101

3. Find the related views of the prolate ellipsoid determined by the axis o perpendicular to the ground plane π and by the forming ellipse m. There are known the center S and the lengths a, b of semi-axes of the ellipse. Truncate the ellipsoid by the intersection plane σ determined by its traces pσ, nσ [ ( )5;4;0S ; a=5; b=3; ( )9;6;7σ ].
4. Find the related views of the paraboloid of revolution determined by the axis o perpendicular to the ground plane π and by the forming parabola m. There are known the vertex V and the focal parameter p of the parabola. Truncate the paraboloid by the intersection plane σ determined by its traces pσ, nσ [ ( )6;5,4;0V ; p=1,6;
( )5;7;5,7−σ ].
5. Find the related views of the paraboloid of revolution determined by the axis o perpendicular to the ground plane π and by the forming parabola m. There are known the vertex V and the focal parameter p of the parabola. Truncate the paraboloid by the intersection plane σ determined by its traces pσ, nσ [ ( )5;5;0V ; p=1; ( )∞;8;7σ ].
6. Find the related views of the one-sheet hyperboloid of revolution determined by the axis o perpendicular to the ground plane π and by the forming hyperbola m. There are known the center S and the lengths a, b of semi-axes of the hyperbola. Truncate the hyperboloid by the intersection plane σ determined by its traces pσ, nσ [ ( )5;5;2−S ; a=1,5; b=2; ( )6;10;8σ ].
7. Find the related views of the one-sheet hyperboloid of revolution determined by the axis o perpendicular to the ground plane π and by the forming hyperbola m. There are known the center S and the lengths a, b of semi-axes of the hyperbola. Truncate the hyperboloid by the intersection plane σ determined by its traces pσ, nσ [ ( )4;4;0S ; a=1,5; b=2; ( )7;7;6−σ ].
102

HELICAL SURFACES
Mission
The mission is to define the helical movement and description of basic geometrical figures generated by helical movement: the helix and the helical surfaces.
Aims
1. dBeing able to define helical movement.
2. Being able to characterize the helix and construct its view.
3. Being able to characterize and to view linear helical surfaces.
In the previous chapter we defined the notion of surface and introduced some criteria for the classification of surfaces. One of them was classification according to the type of movement of the forming unit. In this chapter we will deal with geometric figures generated by the helical movement of points, lines and circles.
BASIC TERMS
Definition of the helical movement
The movement composed from two steady motions - the revolution about the axis o and axial displacement is called a helical movement.
According to the motion orientation, there are two kinds of helical movement:
right-handed, when the revolution and displacement are approvingly oriented (both positive or both negative)
left-handed, , when the rotation and displacement are oppositely oriented.
The curve created by helical movement of the point A about an axis o is called the helix (right-handed helix Fig.a, .left- handed helix Fig.b).
Since for helical movement, the distance of the point from the axis does not change, helix is wound on a cylindrical surface of revolution whose axis is identical to the axis o of the helical movement and the radius r of the determining circle is equal to the distance between the
A r
v
o A′
s
o
A
A′
s
a) b)
103

forming point and the axis o. Point A for the revolution angle 2π is shifted in the axial direction of the length v and created one screw of the helix. Value v is called the pitch of the helix.
Let 0v is the length shift corresponding to the revolution angle 1 radian. Value 0v is called the parameter of the helical movement.
The helix has the property that the tangent line at any point makes a constant angle α with a plane perpendicular to the axis o (Fig.a). We say that the helix is a curve with a constant slope
πrvα
2= tg .
Let us develop a cylindrical surface on which the helix is wound in a plane (Fig.b). Surface will develop into a rectangle with sides of lengths 2πr and v. One screw of the helix will develop into a diagonal AA ′ of that rectangle. For pitch v of the helix then applies relationship 02 vπv = .
View of a helix
We describe the procedure for viewing the helix in two kinds of parallel projection: the Monge projection and orthogonal axonometry.
Exercise 1: Find the related views (in Monge´s method) of one screw of the right-handed helix, which is created by point ( )0;6;1A0 screwing around the axis o perpendicular to the ground plane π. The ground view of the axis is the point
( )0;;0o 5,31 , the pitch of the helix v=9.
Solution: After viewing the point A0 and axis o we construct related views of the cylindrical surface which helix is wound on. The ground view of it is the circle 1s with center 1o and
radius 11oA0=r , the front view is the rectangle (Fig.a). Two sides of the rectangle will be tangent lines to the front view of the curve.
Curve can be determined by twelve other positions of the forming point A0 . Revolution and displacement we divide up into twelve identical sections. Revolution is visible in the ground view and axial displacement in the front view.
1t
o
r
1T α
T
t
A
A′
A
A′
αr 2πr
0v
v( )s
a) b)
104

The circle 1s , which is a ground view of the helix, we divide in the positive direction at 12 identical parts. We receive points 1A1 , 1A2 , ... , 1A12 that are ground views of the helix points.
Revolution of the point A0 by angle 212π corresponds to the axial displacement of the size
v12
. Therefore, we divide the pitch v into 12 equal parts by points 1, 2, 3, ..., 12. Then the
front view 2A1 of the point A1 lies on a line perpendicular to reference line 1,2x and the line
parallel to 1,2x constructed through point 1. Similarly, we find front views 2A2 , ..., 2A12 of helix points.
Exercise 2: Find the view of one screw of the left-handed helix, which is created by point ( )0;;0A0 5 screwing around the axis o = z with the pitch v=11 in the orthogonal axonometry - isometry.
Solution: Axonometric triangle Δ XYZ is a equilateral triangle in isometry (under Chapter 4). Therefore axonometric views ax , ay , az of the coordinate axis make an angle 120°. Also, the length of unit line segments 8,0=== zayaxa jjj . Axonometric view of the point ( )0;;0A0 5
is the point a0 A on the line ay at the distance AA yy
a8,0= ( 45.8,0 ==
aAy ) from aO .
In solving the task, we proceed similarly to Example 1. The base of the cylindrical surface of the helix is the circle 1s with the center O and diameter 5== Ayr . Its axonometric view 1as is the ellipse with the major axis KL perpendikular to the coordinate axis az , r2=KL . For
10 A
1o
20 A
2o
1,2x
1s
v
r
2r
3
10
112 AA =
11 A
13 A
15 A
16 A 1
7 A 1
8 A
19 A
110 A
111 A
1o
20 A
21 A
22 A
23 A
24 A
25 A
26 A
27 A
28 A
29 A
210 A
211 A
212 A
2o
14 A
1 2
4 567
89
1011 12
1,2x
v
1s
2s
12 A
12
a) b)
105

the minor vertice M it is ML || ay . To be able to divide a circle 1s into 12 identical parts from the point A0 , we construct its affine view – the circle 1s′ with the center aO and diameter r and affine view of the point A0 - the point 0′ ( 0Aa
0 ′ || az ). The circle 1s′ we divide in the negative direction at 12 identical parts. We receive the points 1′ , 2′ , ... , 11 ′ . Using the lines parallel to az we obtain axonometric ground views 1aA1 , 1aA2 , ... , 1aA12 of the helix points.
To divide the circle s at 12 identical parts. We receive points 1aA1 , 1aA2 , ... , 1aA12 that are ground views of the helix points.
We construct a segment of the size vva 8,0= for the distribution of axial displacement. This segment we divide into 12 equal parts. On lines passing through the points 1aA1 , 1aA2 , ... ,
1aA12 parallel to the axis az we put from these points the lengths of displacement corresponding to the revolution and obtain points aA1 , aA2 , ... , aA12 . These points give the axonometric view on one screw of the left-handed helix.
BASIC PROPERTIES OF HELICAL SURFACES
Definition Helical surface can be created by a helical movement of a curve k.
Each point of screwing unit describes the helix. On the helical surface thus there are two systems of lines: forming lines and helixes formed by the points of forming lines.
Planar intersection of helical surfaces by the plane passing through the axis of the helical movement is called meridian. Planar intersection of helical surfaces by the plane perpendicular to the surface axis is called normal intersection. Helical surface formed by a curve k can be constructed by screwing its normal intersection or one part of the meridian. Helical surface can also be the envelope surface formed during screwing another surface.
1
zo =12
2 3
4 5
6 7
8 9
10 11
a11 A
a12 A
a13 A
a14 A
a15 A a1
6 A
a17 A
a18 A
a19 A
a110 A
a111A
a0 A a1
12A= a
1 A a
2 A a
3 A
a4 A
a5 A
a7 A a
9 A a
10 A
a11 A
a12 A
ax ay 0′
1′ 2′
3′
4′
6′
7′ 8′
9′
01 ′
11 ′
av
a6 A
a8 A
k′
1as
as
aO K L
M
N 1s′
106

Helical surfaces can be distributed with respect to the forming line to:
linear (line segment is is subjected to helical movement),
cyclical (cicle or its part is subjected to helical movement),
general (an arbitrary curve or its part is subjected to helical movement).
LINEAR HELICAL SURFACES
The linear helical surfaces are formed by helical movement of the line p, which is not parallel to the axis o of the helical movement.
According to the position of the line p relative to the axis o we divide linear helical surfaces on following types:
orthogonal closed,
where the line p intersects the axis o and op ⊥
k
o
107

klinogonal closed,
where the line p intersects the axis o and p is not perpendicular to o
orthogonal opened,
where p is the line nonintersecting to the axis o and op ⊥
klinogonal opened,
where p is the line nonintersecting to the axis o and p is not perpendicular to o.
View of linear helical surfaces
Linear helical surfaces will be displayed in the position where the movement axis is perpendicular to the ground plan π. We display surface created by the line segment AB. On the surface are two systems of lines: forming line segment AB in the individual positions and the helixes which are formed by points of this segment. To illustrate the surface it is sufficient to construct the helix created by boundary points A, B.
Exercise 3: Find the related views (in Monge´s method) of one screw of the right-handed linear helical surface, which is created by line segment BA 00 [ ( )0;6;1A0 ,
( )0;3,5;0B0 ] screwing around the axis o perpendicular to the ground plane π. The
108

ground view of the axis is the point 11 Bo 0= , the pitch of the helical surface v=10.
Solution: We construct the related views 10
10 BA , 2
02
0 BA of the zero position of forming line BA 00 . The ground view of the axis o is the point 11 Bo 0= and the front view 1,22 xo ⊥ . It follows from the views that the point B lies on the line o and the line segment is perpendicular to this line. So, this surface is orthogonal closed helical surface.
10
112 AA =
11 A 1
2 A
13 A
15 A
16 A 1
7 A 1
8 A
19 A
110 A
111 A
20 A
21
21 BA = 2
2 A 2
3 A 2
4 A
25 A 2
6 A 27
27 BA =
28 A
29 A
210 A
211 A
212 A
2o
14 A
2P
1t′
1,2x
v
1 2 3 4 5 6 7 8 9
10 11 12 2
12 B
20 B
1112
10 oBB ==
1P
29 B
1s
2s
211B
210 B
28 B
26 B
25 B
24 B
23 B
22 B
We determine the surface by thirteen positions of forming line BA 00 . Its boundary points BA, 00 form a helices. We construct related views of these helices (Exercise 1). The ground
view of the helix of point A0 is the circle 1s with center 1o and radius 10
1 Ao=r . Ground views 1A1, 2A1, 3A1, ..., 12A1 = 0A1 of individual positions of the point A divide it into twelve identical parts. The front views can be found in the corresponding height above the axis 1,2x .
Point B0 lies on the axis o, therefore of the two movements, forming helical movement, makes only displacement. So “helix” created by the point B0 is the segment of line o. Ground views 1
121
11
0 B...,,B,B are identical to the point 1o . Front views 1B2, 2B2, 3B2, ..., 12B2 of individual positions of the point B are on the line 2o in the corresponding height above the axis 1,2x .
The individual positions of the forming segment 0A0B, 1A1B, 2A2B, 3A3B, ..., 12A12B together with the contour line form the view of the closed orthogonal helical surface. The circle 1s is the contour line on the ground view. On the front view, the contour consists from the front views of helices created by points BA, 00 .
109

Exercise 4: Find the related views (in Monge´s method) of one screw of the left-handed linear helical surface, which is created by line segment BA 00 [ ( )2;1;1A0 ,
( )0;3,5;0B0 ] screwing around the axis o perpendicular to the ground plane π. The ground view of the axis is the point 11 Bo 0= , the pitch of the helical surface v=8.
10
112 AA = 1
1 A 1
2 A
13 A
16 A 1
8 A
19 A
110 A
20 A 2
1 A 23 A
24 A
25 A
26 A 2
7 A 2
9 A 2
10 A 2
11 A
1,2x
1112
10 oBB ==
20 B
212 B
212 A
2o
111 A
2s
1s
1 2 3 4 5 6 7
9 10 11 12
8
17 A
15 A
14 A
Solution: After constructing the related views of the segment BA 00 and the axis o it is evident that the klinogonal closed helical surface arises. Example solution procedure is similar to Example 3.
Exercise 5: Find the view of one screw of the left-handed linear helical surface, which is created by line segment BA 00 [ ( )0;5;0A0 , ( )3;0;0B0 ] screwing around the axis o = z with the pitch v=11 in the orthogonal axonometry – isometry.
110

Solution: After constructing the related views of the segment BA 00 and the axis o it is evident that the klinogonal closed helical surface arises. We will solve the example according to Exercises 2 and 4.
All previously mentioned linear helical surfaces surfaces can not develop into a plane. There is only one developable helical surface: the surface of tangents to the helix shown in Figure.
CYCLICAL HELICAL SURFACES The cyclical helical surfaces are formed by helical movement of the circle. There are two important systems of curves: system of individual positions of the forming circle and the system of helices formed by circle points. The most commonly used are three types of cyclical helical surface:
1
12
2 3
4 5
6 7
8 9
10 11
av
aa zo =
a13 A a
0 A a
1 A a
2 A a
3 A
a4 A
a5 A
a7 A a
9 A a
10 A
a11 A
a12 A
ax ay 0 ′
1′ 2 ′ 3 ′
4 ′
6 ′
7 ′ 8 ′
9 ′
01 ′
11 ′
a6 A
a8 A
a0 B
a12 B
as
111

forming circle lies in a plane passing through the axis of the helical movement
forming the circle lies in a plane perpendicular to the axis of the helical movement
2o
1,2x
1o1x
1y
k
o
aa zo =
ax ay
2o
1,2x
k
o
1o1x
1y
aa zo =
ax ay
112

forming circle lies in the plane perpendicular to the tangent line to the helix of the circle centre.
Self-evaluation examples
1. Find the related views (in Monge´s method) of one screw of the left-handed helix, which is created by point ( )072 ;;-A0 screwing around the axis o perpendicular to the ground plane π. The ground view of the axis is the point ( )05401 ;,;o , the pitch of the helix v=10.
2. Find the view of one screw of the right-handed helix, which is created by point ( )050 ;;A0 screwing around the axis o = z with the pitch v=10 in isometry.
3. Find the related views (in Monge´s method) of one screw of the left-handed linear helical surface, which is created by line segment BA 00 [ ( )0751 ;;,-A0 , ( )050 ;;B0 ] screwing around the axis o perpendicular to the ground plane π. The ground view of the axis is the point 11 Bo 0= , the pitch of the helical surface v=8.
4. Find the related views (in Monge´s method) of one screw of the right-handed linear helical surface, which is created by line segment BA 00 [ ( )073 ;;A0 , ( )3540 ;,;B0 ] screwing around the axis o perpendicular to the ground plane π. The ground view of the axis is the point 11 Bo 0= , the pitch of the helical surface v=11.
5. Find the view of one screw of the left-handed linear helical surface, which is created by line segment BA 00 [ ( )005 ;;A0 , ( )000 ;;B0 ] screwing around the axis o = z with the pitch v=10 in isometry.
6. Find the view of one screw of the right-handed linear helical surface, which is created by line segment BA 00 [ ( )050 ;;A0 , ( )300 ;;B0 ] screwing around the axis o = z with the pitch v=10 in isometry.
2o
1,2x
o
k
1o1x
1y
aa zo =
ax ay
113