
Soutenue le 14 Novembre 1983 devant la Commission...
41
ACADt:MIE DE MONTPELLIER UNIVERSITÊ DES SCIENCES ET TECBNIQUES DU LANGUEDOC THESE présentée à l'Université des Sciences et Techniques du Languedoc pour obtenir le grade de Docteur de 3ème Cycle MATHËMATIOUES PURES ET APPL/OUËES - ..• .'-'. 1 , ! ' .. • < • DIAGRAMMES de DE FINETTI _. l ,_ ,-', ',". ',.. , , . , par Boubakar Yobi AMIDQU Soutenue le 14 Novembre 1983 devant la Commission d'Examen JURY MM. A. MICALI F. lAPSCHER M. lEFRANC ATELIER OUPLICATION - U.5.T.L. - Président
Transcript of Soutenue le 14 Novembre 1983 devant la Commission...
ACADt:MIE DE MONTPELLIER
UNIVERSITÊ DES SCIENCES ET TECBNIQUES DU LANGUEDOC
THESE
présentée à l'Université des Sciences et Techniques du Languedocpour obtenir le grade de Docteur de 3ème CycleMATHËMATIOUES PURES ET APPL/OUËES
-..•~ .'-'.
1
,!
'..
• < •
DIAGRAMMES de DE FINETTI
_ . l ,_ ,-', ',". ',.. , , . ,
par
Boubakar Yobi AMIDQU
Soutenue le 14 Novembre 1983 devant la Commission d'Examen
JURY MM. A. MICALI
F. lAPSCHER
M. lEFRANC
ATELIER OUPLICATION
- U.5.T.L. -
Président
Je tiens à remercier très sincèrement :
- Monsieur le Professeur A. Micali qui a bien voulu me proposer un sujet fort
intéressant et pour toute sa disponibilité durant ce travail.
- Messieurs les Professeurs F. Lapscher et M. Lefranc qui ont consacré leur
temps pour lire ces pages et accepté de faire partie du jury.
- Melle Brun qui, malgré mes écritures pas très lisibles, a su fournir un texte
fort impeccable.
Tous ceux qui, à l'U.S.T.L. n'ont cessé de satisfaire à toutes mes requêtes.
- Tous les amis qui m'ont tout le temps encouragé dans ce travail.
TABLE DES MATIERES
page
CHAPITRE 1 : ESPACES PROJECTIFS
1 .1. Déf'Lnd,ti ons ....••...........................................
1 .2. Coordonnées homogènes et représentation des points du planprojectif ••••••.••••••••••••••••••••••.•••••••••••••••••..••
1.3. Variétés projectives et morphismes d'espaces projectifs..... 2
1.4. Expression -d'une collinéat1on de i'(R3).a _ •• _... • ••••• 4
CHAPITRE 2 : DIAGRAMMES DE DE FlNETTI
2.1- Diagrammes de De Finetti et s~lection•••••••••••••••••••••••
2.2. Diagrammes de De Finetti et coordonnées triangulaires •••••••
2.3. Diagrammes de De Finetti et espaces projectifs ••••••••••••••
CHAPITRE 3 : LA LOI DE HARDY-WEINBERG
3.1. La parabole de Hardy-Weinberg •••••••••••••••••••••••••••••••
3.2. Etude analytique de l'application ~ •••••••••••••••••••••••••
3.3. Etude de ~ par les projectivités •••••••••••• ~......,,..••.•.,.~•••••
3 .4. Transformée de la parabole de HardY-Wein~,i;'par ~;.~.-''-''~.''.~ -, .: \
3 5 A 1 " t" '1 ' 't~ ~ \ '•• pp aca aons a a gene a.que ••••••••••••• .-..; _.-r ••~.) ~ ( .•\ 1",:1 1- \ _.";
3.6. La loi de Hardy-Weinberg et algèbres gén!étiques-;;;-;-••• ~ •.• ~ ••
CIL\PITRE 4 : SUR QUELQUES MODELES GENETIQUES D' APRE~·~;lt., Y:f..G~o)• - - ..' "" fi,"" .?
4.1. Premier modèle ..••,........•.................. ~;-.- .• ~ .... ~ .•.....
4.2. Deu.xième modèle •..•......................•....•.•..•....••..
BIBLIOGRAPHIE •••••••••••••••••••••••••••••••••• 0 •••••••••••••••••••• Q ••
6
7
8
13
14
16
18
19
29
32
33
37
1 •
1. Espaces projectifs
1 .1. Défini tion
Soient K un corps commutatif et E un K-espace vectoriel. On considère
sur E ,,{O} la relation d'équivalence notée _. Si x et y sont dans E ~{O} on
dira que x est équivalent à y s'il existe À dans K, À ~ 0 tel que y = Àx et on
note x-y. La relation- est bien une relation d'équivalence sur E __{O} et
on appelle espace projectif déduit de E ou associé à E l'ensemble quotient
~(E) = E ,,{O}/- et notons la surjection canonique n E ,,{O} ~ œ(E) = E ,,{O}/
Si x E E ,{O}, n(x) = {yly E E .......... {O}, tel que y - x} ou encore
n(x) = {y Iy E E ........ {O}, y = Xx , À E K, À ~ O}. Les éléments de IP(E) sont appelés
des pOints. Si di~(E) < =, la dimension de œ(E) que l'on note di~(œ(E)), est
définie comme étant l'entier di~(E) - 1. Si d~~(~(E)) = 1, F(E) s'appelle une
droite projective et si di~(~(E)) = 2, œ(E) est un plan projectif. On sait que
toute variété affine peut être complétée en une variété projective, c'est-à-di
re, en un espace projectif.
1 .2. Coordonnées homogènes et représentation des points du plan projectif
On considère dans le plan affine un point M de coordonnées (x,y). On lui
associe le triplet (x,y,1). Tout triplet (u,v,w) où w ~ 0, tel que u = xw,
v = yw est dit coordonnées homogènes du point M. Réciproquement à tout triplet
(u,v,w) où w ~ 0, il correspond un et un seul point du plan affine de coordon
nées cartésiennes (~,~). Les triplets de la forme (u,v,O) sont appelés lesww
points à l'infini du plan affine.
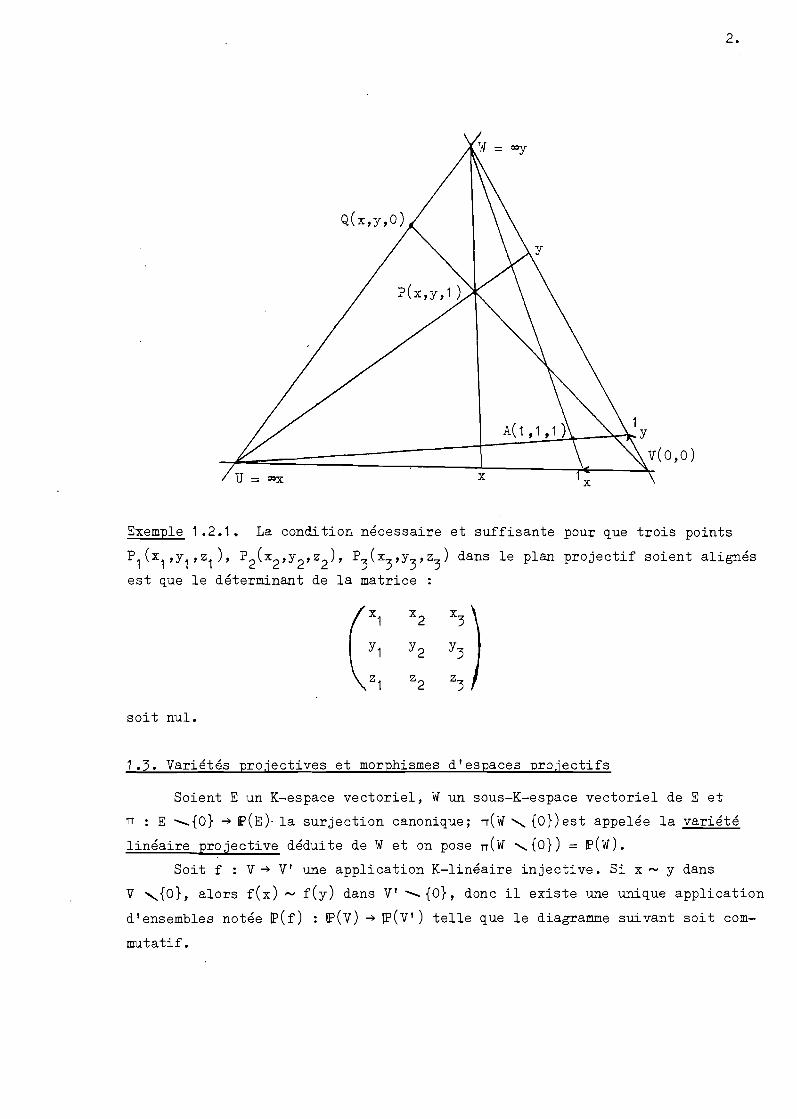
On considère dans le plan projectif, trois points U,V,W non alignés. On
suppose que la droite UW est la droite à l'infini du plan projectif associé au
plan affine déterminé par VU et VW, dont l'origine est V. On choisit sur VU et
VW deux vecteurs unitaires 1- etl. On détermine ainsi le.point A(1 ,1 ,1). Ain-x y
si tout point P qui n'est pas surUW sera repéré par ses coordonnées cartésien-
nes (x,y). On notera P(x,y,1). L'intersection de VP avec UW sera notée Q(x,y,O).
L'introduction des coordonnées homogènes supprime les difficultés dûes à la par
ticularité des points à l'infini et ceux-ci se manient de la même façon que les
points du plan affine. L'usage des déterminants aux coordonnées homogènes se
fait de la m~me manière-que dans un espace vectoriel. On procède de la même ma
nière quand on cherche la collinéarité de trois points.
2.
Exemple 1.2.1. La condition nécessaire et suffisante pour que trois points
P1(x1 'Y1'Z1)' P2(x2'Y2'Z2)' P3(x3'Y3'Z3) dans le plan projectif soient alignés
est que le déterminant de la matrice :
soit nul.
1.3. Variétés projectives et morphismes d'espaces projectifs
Soient E un K-espace vectoriel, W un sous-K-espace vectoriel de E et
n : E ,,{o} ~ ~(E)· la surjection canonique; n(W" {O})est appelée la variété
linéaire projective déduite de W et on pose n(W ,,{O}) = ~(W).
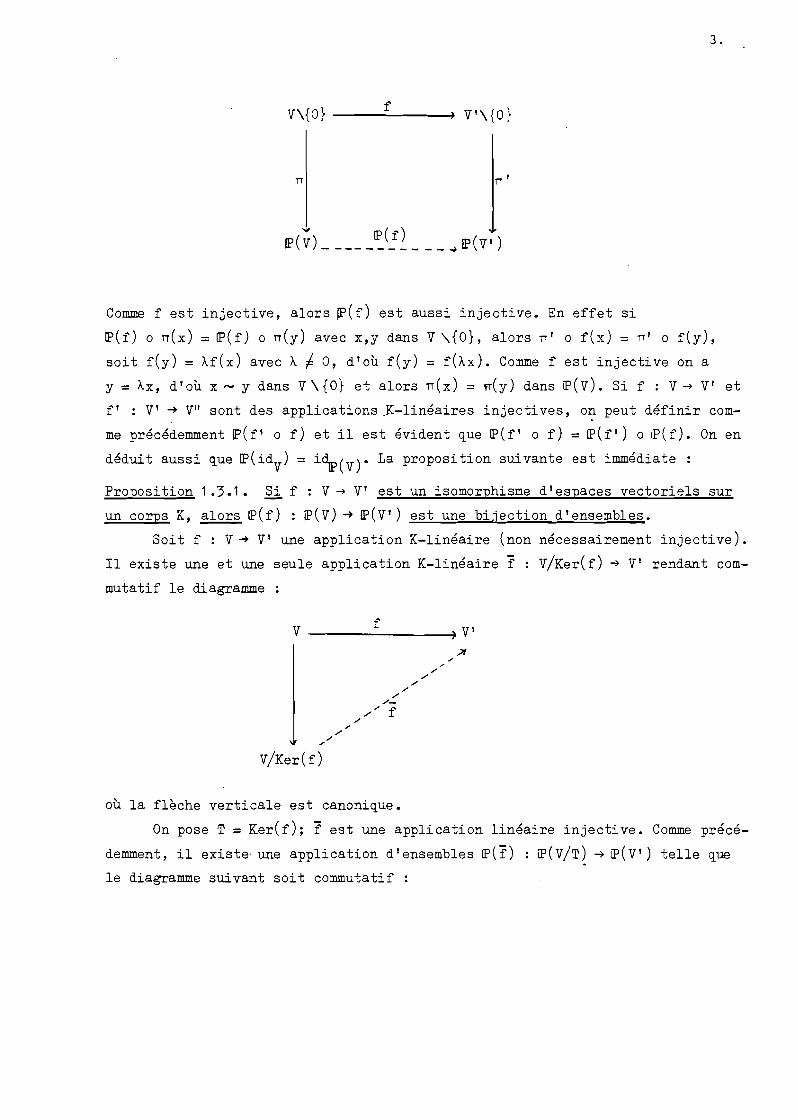
Soit f : V ~ V' une application K-linéaire injective. Si x ~ y dans
V ,,{O}, alors f(x) ~ f(y) dans V' "{O}, donc il existe une unique application
d'ensembles notée ~(f) : W(V) ~ W(V') telle que le diagramme suivant soit com
mutatif.
3.
f
rr n'
!p(V) ~~~ -# œ(v')
Comme f est injective, alors ~(f) est aussi injective. En effet si
!P(f) 0 n(x) = ~(f) 0 n(y) avec x,y dans V \{O}, alors n' 0 f(x) = n' 0 f(y),
soit f(y) = ~f(x) avec ~ ~ 0, d'où f(y) = f(~x). Comme f est injective on a
y = ~x, d'où x'" y dans V\{O} et alors n(x) = '!T(y) dans IP(V). Si f : V ~ V' et
f' : V' ~ V" sont des applications X-linéaires injectives, on peut définir com
me précédemment !P(f' 0 f) et il est évident que lP(f' 0 f) = ~(f') 0 lP(f). On en
déduit aussi que ~(idV) = i~(V). La proposition suivante est immédiate:
Proposition 1.3.1. Si f : V ~ V' est un isomorphisme d'espaces vectoriels sur
un corps K, alors lP(f) : !p(V) ~ ~(V') est une bijection d'ensembles.
Soit f : V ~ VI une application K-linéaire (non nécessairement injective).
Il existe une et une seule application K-linéaire f : V/Ker(f) ~ V' rendant com
mutatif le diagramme
fV -- ~) V'
;;r
V/Ker(f)
où la flèche verticale est canonique.
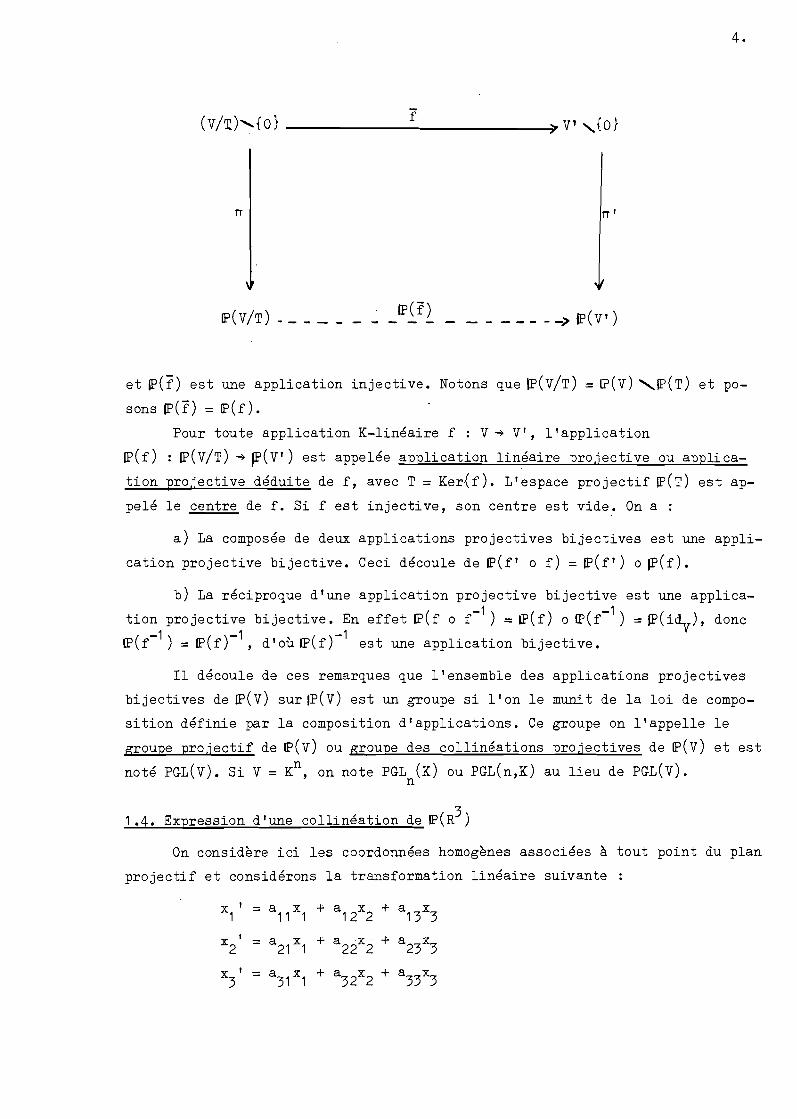
On pose T = Ker(f); f est une application linéaire injective. Comme précé
demment, il existe- une application d'ensembles ~(f) : IP(V/T) ~ !p(V') telle que
le diagramme suivant soit commutatif:
4.
(V/T) ........ {O} ~~ V' ,{O}
TT
IP(V/T)
TT'
œ(r) ,___ - _ - - _ - - -> (p(V )
et w(r) est une application injective. Notons que œ(V/T) = œ(v) "W(T) et po
sons w(r) = lP(f).
Pour toute application K-linéaire f : V ~ V', l'application
œ(f) : œ(V/T) ~ ~(V') est appelée application linéaire projective ou applica
tion projective déduite de f, avec T = Ker(f). L'espace projectif W(T) est ap
pelé le centre de f. Si f est injective, son centre est vide. On a :
a) La composée de deux applications projectives bijectives est une appli
cation projective bijective. Ceci découle de lP(f' 0 f) = œ(f') 0 ~(f).
b) La réciproque d'une application projective bijective est une applica
tion projective bijective. En effet œ(f 0 f-1) = œ(f) 0 œ(f-1) =W(i~), donc
œ(f-1) = lP(f)-1, d'où œ(f)-1 est une application bijective.
Il découle de ces remarques que l'ensemble des applications projectives
bijectives de œ(v) surIP(V) est un groupe si l'on le munit de la loi de compo
sition définie par la composition d'applications. Ce groupe on l'appelle le
groupe projectif de œ(v) ou groupe des collinéations projectives de IP(V) et est
noté PGL(V). Si V = Kn, on note PGL (K) ou PGL(n,K) au lieu de PGL(V).n
1.4. Expression d'une collinéation de IP(R3)
On considère ici les coordonnées homogènes associées à tout point du plan
projectif et considérons la transformation linéaire suivante
x1, = a
11x
1+ a
12x2+ a
13x3
x2, a
21x
1+ ax· + a
23x3= 22 2
x3, = a
31x
1+ a
32x2+ a
33x3
5.
Une telle transformation envoie tout point (x 1,x2,x3) du plan projectif en un
point unique (x1
t ,x2'
,x3
' ) du plan projectif. RécIproquement, à chaque point
x' = (x1',x
2',x
3' ) du plan projectif il correspondra un point unique
x = (x1,x2,x3
) pourvu que le déterminant de la matrice associée:
a12
a13
a22
a23
a32
a33
soit non nul.
Une collinéation projective dans le plan projectif peut être représentée
en coordonnées homqgènes, par des équations de la forme ci-dessus telles que
le déterminant de la matrice associée soit non nul. Réciproquement, toute trans
formation du plan projectif de cette forme dans laquelle le déterminant de la
matrice associée est non nul représente une collinéation projective.
Une collinéation perspective dans un plan projectif est une collinéation
projective laissant invariants chaque point d'une droite D et un point donné O.
La droite D et le point 0 sont appelés respectivement l'~ et le centre de la
collinéatian. Si 0 est sur D, la collinéation est appelée une élation plane.
Si 0 n'est pas sur D, la collinéation est appelée une homologie plane.
6 ~
2. Diagrammes de De Finetti
p(S .) .p(À/S .)
= ~ ptSk)P(A/~k)P(S./A)J
On rappelle tout d'abord la formule de Bayes. Soit une population O. On
suppose que 0 est constituée de sous populations S1 ,S2' ... qui constituent une
partition de O. Soit A un évènement de probabilité non nulle. Supposons, connues
les probabilités P(S.) et les probabilités conditionnelles P(A/S.). Alors lesJ J
probabilités P(S./A) sont données parJ
2.1. Diagrammes de De Finetti ·et sélection
Dans une population à deux allèles œ et ~ on suppose que les fréquences
de œ et ~ sont respectivement p et q avec p+q = 1. Désignons par u,v,w les fré
quences des génotypes œœ, œ~, ~~ respectivement. On a alors u ~ 0, v ~ 0, w ~ 0,
u+v+w = 1, P = u + ~' q = w + ;. On dit que la population est en équilibre de
Hardy-Weinberg si l'on a la relation v2 = 4 uw. Supposons que quand des enfants
naissent de cette population leur chance de devenir adultes dépend de leurs ~
notypes, et est donnée par P(S/aa) = a, P(S/œ~) = h et P(S/~~) = b où S repré
sente l'évènement d'être adulte. En considérant la population f'adultes issue
de ces enfants les nouvelles fréquences génotypiques seront données par la for
mule de Bayes et exprimées par u' = P(aœ/S) = a ~' v' = P(œ~/S) = h ~' et
w' = p(~~/S) = b ~ avec f = au + hv + bw. On se p~opose d'étudier la corresponf
dance (u,v,w)~ (u',v',w').
on passe des frév'
p'=u'+-=2
u,v,w respectivement par2an
2 t. 2 +ap +2hpq+bq
~ [0,1J où [0,1J dési-On obtient donc une application ~ : [0,1J
fréquences p' ,q', lesquelles sont données parv' w v
q' = w' + ;2 = h f + h 2f • En remplaçant
2q dans les formules précédentes en a p' = --~~----~
Lorsqu'on considère une population en équilibre de Hardy-Weinberg on a2 2
u = P , v = 2 pq, w = q • A l'aide de l'application ci-dessus
quences p,q auxu v
= a f + h 2f et
p2, 2pq , ( 1_p )2 =
réel entre ° et 1, définie par ~(p) = p'2
ap +11n9 L=? 2- es
ap-+2hpq+hq
points d' éq,Ülïbre..de. la parabcle de Hardy-WeinbeI'g sont les points p tels que
~(p) = p soit ap2 + hpq = p( ap2+2hpq+hq2). Si p ~ 0, on obtient ~'équation
(a-2h-b)p2 + (3h-2b-a)p + b-h = ° dont les solutions2 .
_ ap ~hp(.t--p)plaçant q par 1-p on a ~(p) - 2 •
ap +2hp(1-p)+b(1-p)
b-hsont 1 et a+b-2h. En rem-
La dérivée de ~ s'écrit
7
dérivée/
6' ~ a si ab ~ h-. Dans ce cas la
-(ab-bh)+Vab(ab-h2)p suivantes : P1 = ah-2ab+bh'
(a~-2ab+bh)p2+2(ab-bh)p+bh• Le discriminar.t 6' de cp'(p) = a s'écrit
[ ap2+2hp(1_p)+b(1_p)2 J2ô' = a2b2 - ab:h.
2 = ab(ab-h2)
et on a
s'annule pour les valeurs de
-(ab-bh)-V;b(ab-h2)
P2 = an-2ab+bh
Il faut naturellement considérer les valeurs qui sont dans [0,1J. Nous
ferons, plus loin (cf. chapitre 3) une étude analytique complète de la parabo-
cp' (p) = ---------
le de Hardy-Weinberg ainsi que les correspondantes interprétations génétiques.
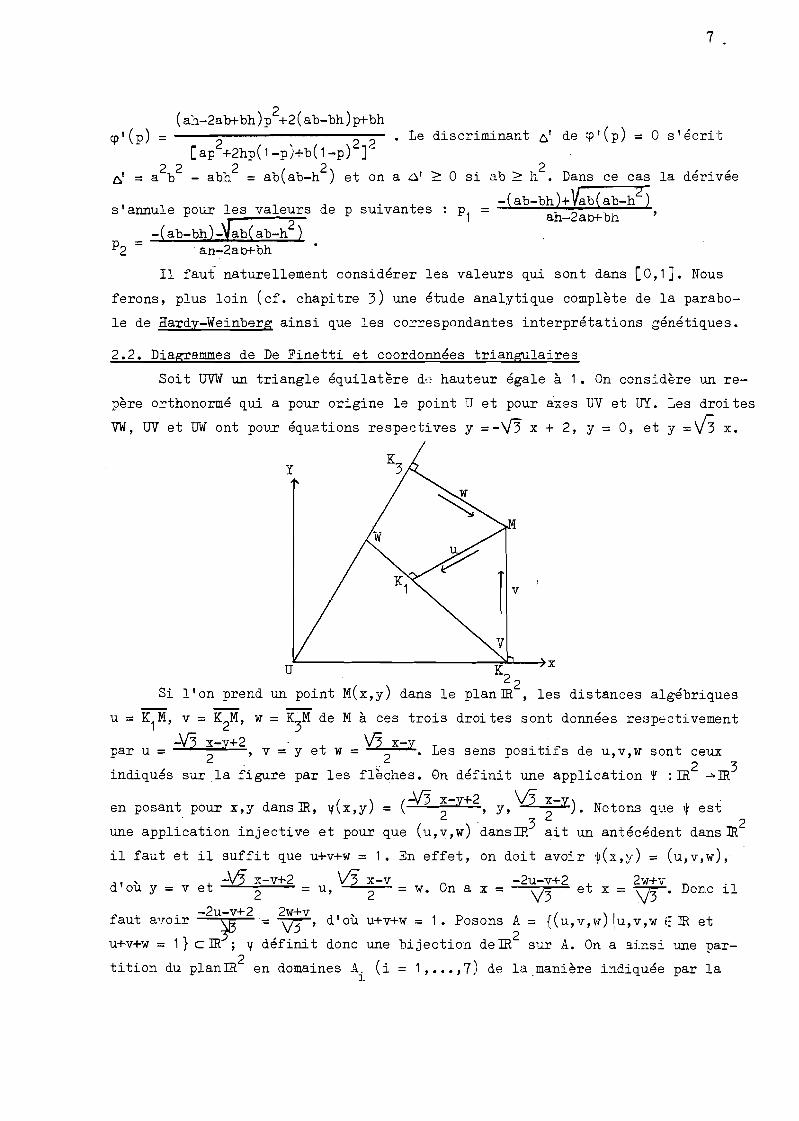
2.2. Diagrammes de De Finetti et coordonnées triangulaires
Soit umv un triangle équilatere de hauteur égale à 1. On cons~dère un re
père orthonormé qui a pour origine le point U et pour axes UV et DY. Les droites
VW, UV et UW ont poux équations respectives y =-\[3 x + 2, y = 0, et y ='13 x.
les distances algébriquesSi l'on prend un point M(x,y) dans le
y
.L.------------"""":':~-~x
u = K1M, v = K2M, w = K3M
de M à ces trois droites sont données respectivement
-V3 x-y+2 - VS x-ypar u = 2 ,v = y et w = 2 • Les sens positifs de u,v,w sont ceux
indiqués s'~ la figure par les fl~ches. On définit une application 0/ :IR2 ~JR3
( ) (-\f3 x-y+2 V3 x-y)en posant. pour x,y dansJR, ~ x,y = 2 ,y, 2 • Notor~ que ~ est
une application injective et pour que (u,v,W)dansIR3 ait un antécédent dansm2
il faut et il suffit que u+v+w = 1. En effet, on doit avoir ~(x,y) = (u,v,w),
-Vi x-v+2 V3 x-v -2u-v+2 2w+vd'où y = v et 2 = u, 2 = w. On a x = V3 et x = "\)3"' Donc il
. -2u-v+2 2w+v , ( )faut aV01r ~=~' d'ou u+v+w = 1. Posons A = { u,V,W !u,v,w Emet
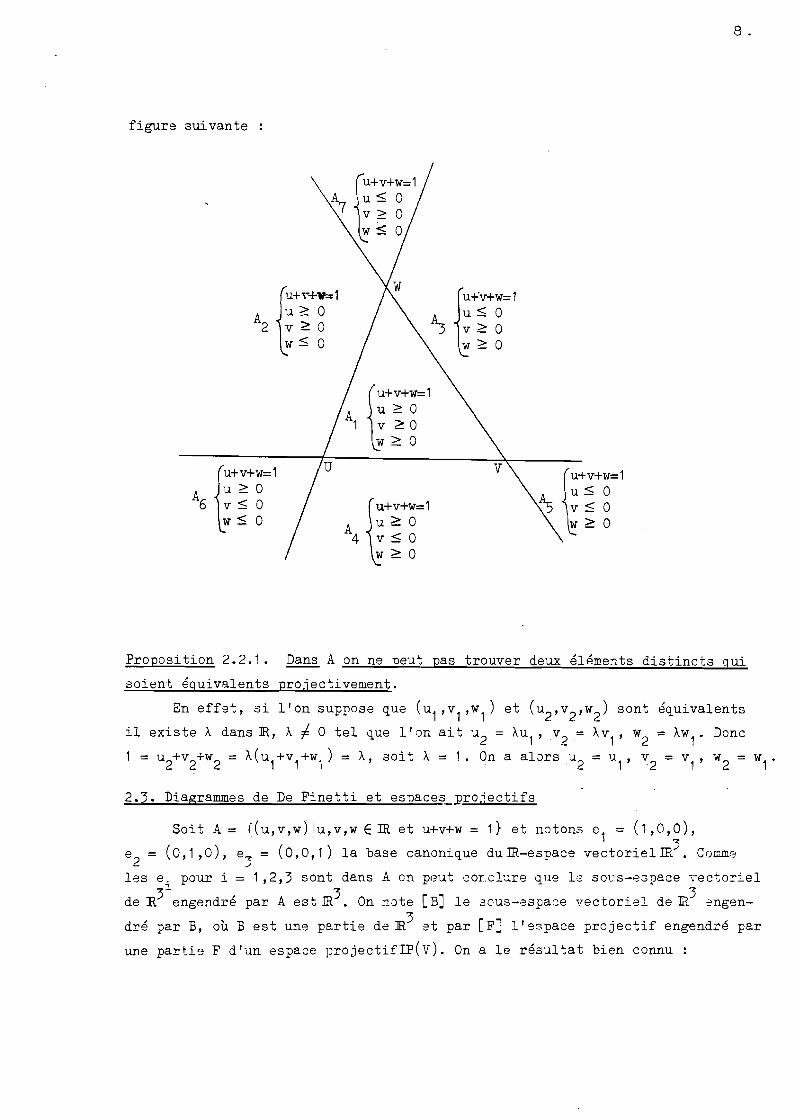
u+v+w = 1} c JR ; '1J définit donc une bijection de IR2 sur A. On a ainsi une par
tition du planIR2
en domaines Ai (i = 1, ••• ,7) de la manière i~diquée par la
8.
figure suivante
~+V+W= 1
L u$ 0\? v $ 0
W ~ 0
~+V+W= 1
L u$ 05 v ~ 0
W ~ 0
tU+V+W=1u~O
v ? 0w~O
t+V+W=1
A u ~ 04 v $ 0w~O
{
U+V"+W=z: 1A u~O
2 v ~ 0w $ 0
~+V+W= 1
~ u$ 0v ~ 0W $ 0
{
u+V+W=1A u ~ 06 v $ 0
w s 0
Proposition 2.2.1. Dans A on ne neut pas trouver deux élérne:'1ts distincts qui
soient éauivalents projectivement.
En effet, si l'on suppose que (u1 ,v1
,W1
) et (u2,v2'w2)sont équivalents
il existe À dansJR, À f:. 0 tel que l'on ait u2
= ÀU1,
v2
= ÀV1,
W2
= ÀW1.
Donc
, = u2+v2+w2 = À(u,+v,+w1) = À, soit À = 1. On a alorsu2 = u1,
v2
= v" w2 = w1
•
2.3. Diagrammes de De Finetti et espaces ~ro~ectifs
Soit A = {(u,v,w) lu,v,w E IR et u+v+w = 1} et notons 81
= (1,0,0),
e2
= (0,1,0), e3
= (0,0,1) la base canonique duIR-espace vectorielIR3. Comme
les e. pour i = 1,2,3 sont dans A en P'3Ut cor.c Lur-e que le s ous-es pace ve ct or i.eLl
de R3 engendré par A est lR3 . On note [BJ le soua-eapa ce vectoriel de]R3 engen-
dré par B, où B est une partie de JR3 et par [F] l'espace projectif engend~é par
une partie F d'un espace projectifIP(V). On a le résultat bien connu:
9 .
Proposition 2.3.1. Soient V un espace vectoriel et F une partie de l'espace
pro,jectifJP(V) associé à V. Alors lP([TT-1(F)J) = [F], où TT : V -7JP(V) désigne
l'application canonique de V dansJP(V).
Corollaire 2.3.2. Si A est la partie de~3 ci-dessus définie, alors [TT(A)] =
=JP(~3), c'est-à-dire, la variété projective de F(R3) engendrée par TT(A) est
JPQR3) elle-même.
En effet, la proposition précédente nous dit que F([TT-1(TT(A))])
= [n(A)]
et comme n-1(TT(A)) ~A, alors [TT-1(TT(A))] = [A] =:R3, d'oùFÇlR3) = [n(A)].
Proposition 2.3.3. Si l'on pose R1 = {(u,v,w) ju,v,w Eill et u+v+w = O} ~
R2
= {(u,v,w) /u,v,w EJR~ u+v+w 1: a}, alors TT(R2) = TT(A) et R1 est un sous-es
pace vectoriel de ~3. De plus, JP(R1)
n TT(R2)= ~.
En effet, comme Ac R2,
alors n(A) c n(R2). Montrons que TT(R2) c TT(A).
Soit (x' ,y' ,z,) dans R2; on cherche (x,y,z) dans A tel que (x,y,z) soit équiva
lent à (x' ,y',z'), c'est-à-dire, on cherche À dans IR , À ~ 0 vérifiant x' = Àx,x'y' = Ày, z' = Àz. La condition x'+y'+z' = À(x+y+z) = À nous donne x = ,x'+y'+z'y' z'y = et z = , , l' On vérifie ainsi que (x,y,z) est dans A, soitx'+y'+z' x +y +z
n(R2)C n(A). Finalement, supposons que (x,y,z) soit dansJP(R1) = n(R.;'\O) et
dans n(R2). Il existe alors (x 1 'Y1 ,z1) dans R1\ 0 et (x 2'Y2,z2) dans R2 tels que
(x,y,z) soit équivalent à (x 1 'Y1 ,z1) et (x,y,z) équivalent aussi à (x2'Y2,z2)'Il existe alors des éléments À et Q dansIR, non nuls, tels que x = ÀX1, y = ÀY1 '
z = ÀZ1 et x = QX2, y = QY2' z = QZ2' Ceci entraîne que x+y+z = À(x1+
y1+z1 ) = 0
et x+y+z = Q(x2+y
2+z2) ~ 0, ce qui est impossible. Donc F(R1) n n(R 2) = ~.
Corollaire 2.3.4. Avec les notations ci-dessus, ~JP(R3) = JP(R1
) U TT(A) =
= JP(R1) U n(R2).
En effet, comme JR3 = R1 U R2
en tant qu'ensembles, alorsIP(:R3) =JP(R1) U
U n(R2) =IP(R1) U TT(A}.
Proposition 2.3.5. Tout élément (x' .s' ,z,) dans:rn.3 équivalent à un élément
(x,y,z) de R1 (resp. R~, est aussi dans R1 (resp. R~. .
En effet, soit (x',y',z') dansE3 équivalent à (x,y,z) dans R1• Il existe
alors À non nul dans:rn. tel que x' = Àx, y' = Ày, z' = Àz, donc x'+y'+z' =
À(x+y+z) = 0 et ceci nous dit que (x',y',z') est dans R1• Démonstration analo
gue pour R2•

10-
Proposition 2.3.6. L'espace prOjectifF(R1) est une droite projective.
En effet, pour tout (u,v,w) danSIP(R1) on a u+v+w = ° et ceci est l'équa
tion homogène d'une droite projective de point à l'infini (1,-1,0) et de points
ordinaires (1,-2,1) et (2,-3,1).
{(x.'y , z) 1x ,y ,z E IR, x?: 0, y?: 0, z?: 0, x+y+zProposition 2.3.7. Si B =alors [n(B)] =F(R3 ) .
La démonstration est la même que
-espace vectoriel de JR3 engendré par B
[n(B)] = FOR?).
~ 1pour l~ehsemble A. On trouve que
est ml et d'après la proposition
= 1},
le sous-
2.3.1.,
Proposition 2.3.8. Si IR~ = {(u,v,w) lu,v,w E JR, u?: 0, v ?: 0, w ?: O} alors
n(IR3 \ 0) = n( B) •+ 3
En effet, comme B est contenu dansIR+ \ 0, alors n(B) est contenu dans
n(lR~ \ 0). D'autre part n(JR~ \ 0) est contenu dans n(B), et pour voir cela, il
suffit de montrer que si (u',v' ,w') est dans JR: \ ° il existe (u,v,w) dans B
tel que (u',v' ,w,) soit équivalent à (u,v,w). Posons u' = Àu, v' = Àv, w' = ÀW,
où À est un nombre réel non nul; on a u'+v'+w' = À(u+v+w) = À, donc À > 0, ce_ ,. u' u' v' Vi w'
qui nous permet d'ecrlre u =~ = , , " v =~ = , , ,et w =~ =f\ U +v +w f\ U +v +w f\
w'- On a bien u ?: 0, v?: 0, w?: ° et u+v+w = 1 soit (u,v,w) est dans B.- u '+v'+w,·
Note 2.3.9. La dimension de R1 est égale à 2.
En effet, commeIP(R1)
est une droite projective on a dimF(R1)
= 1 donc
di9R(R1) = dimF(R1
)+1 = 2. Une base de R1, en tant queJR-espace vectoriel est
alors (f1,f2)
avec f 1 = (0,1,-1), f2
= (-1,0,1). Ces deux vecteurs sont linéai
rement indépendants et engendrent R1
•
Proposition 2.3.10. Le sous-espace vectoriel de:œ? engendré par R2\. JR~ est JR3
lui-même.
Soient fi = (1 ,-2,0), f~ = (0,-1 ,2), f~ = (2,0,-1) trois éléments de
R \IR3• Ces trois vecteurs sont linéairement indépendants donc ils constituent2 + ---une base deIR3• Ils constituent aussi un système de générateurs du sous-espace
vectoriel engendré par R \JR3• Donc le sous-espace vectoriel deIR3 engendré par2 +
R2\
JR: est de dimension 3. Il est donc égal àIR3• Ceci nous donne aussi le ré-
sultat suivant:
Proposi tion 2.3.11. La variété [n(R2'" JR:)J est égale à il'CIR?).
11 .
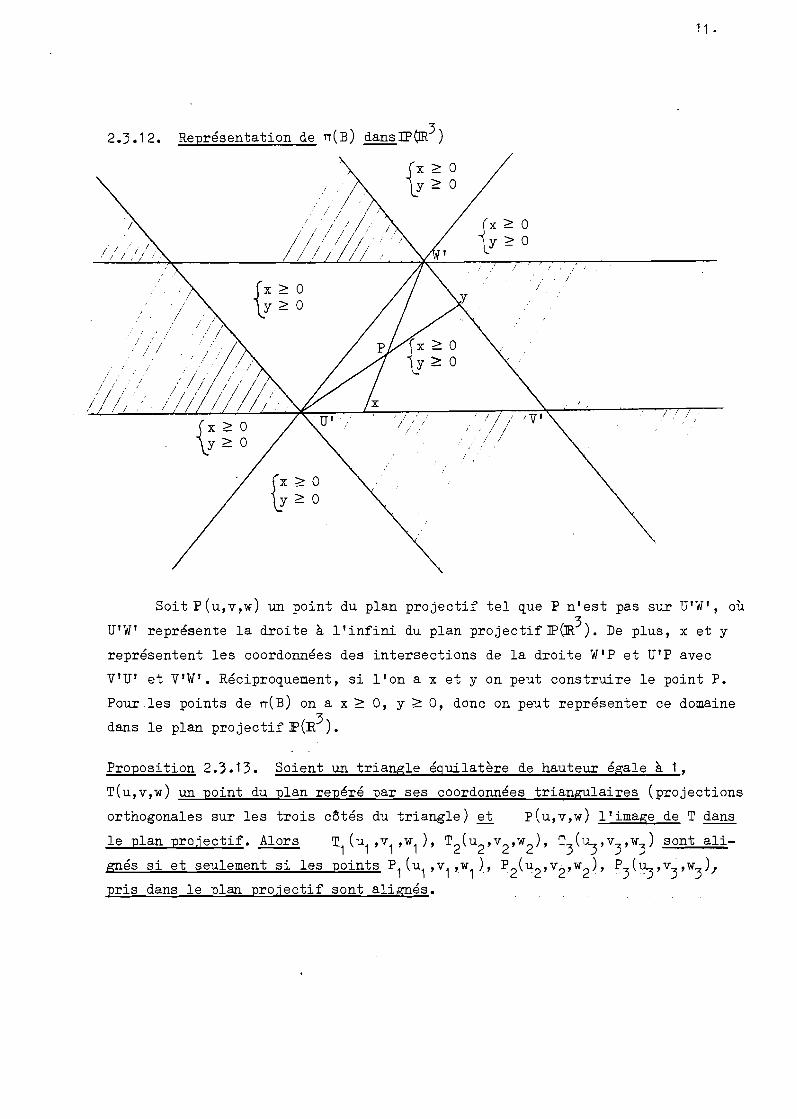
2.3.12. Représentation de n(B) dansIPOR3)
Sx ~ 0lY ~ 0
(x ~ 0\! ~ 0
1 ! ' _
/ / /" ,
{
X ~ 0y~O
/
'/ '
/ 1 1
Soit p(u,v,w) un point du plan projectif tel que P n'est pas sur U'W', où
U'W' représente la droite à l'infini du plan prOjectifF(m3 ) . De plus, x et y
représentent les coordonnées des intersections de la droite W'P et U'P avec
V'U' et V'W'. Réciproquement, si l'on a x et y on peut construire le point P.
Pour les points de n(B) on a x ~ 0, y ~ 0, donc on peut représenter ce domaine
dans le plan prOjectifF(R3 ) .
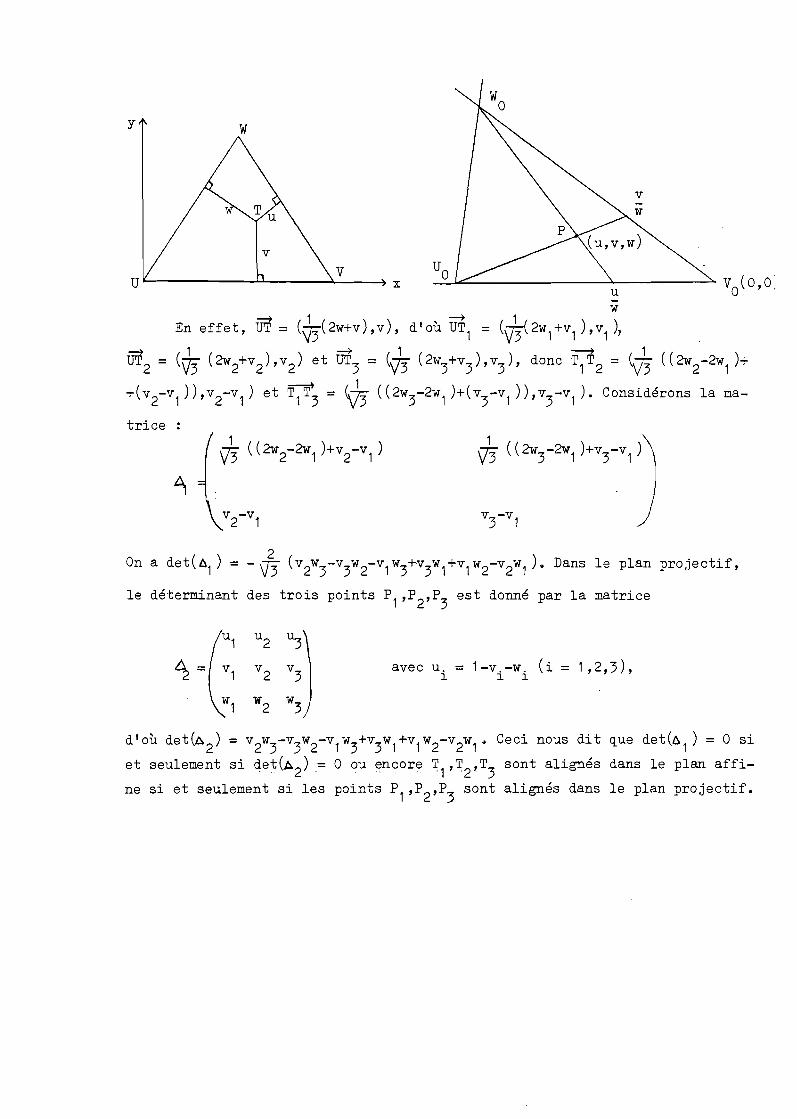
Proposition 2.3.13. Soient un triangle équilatère de hauteur égale à 1,
T(u,v,w) un point du plan repéré par ses coordonnées triangulaires (projections
orthogonales sur les trois c8tés du triangle) et p(u,v,w) l'image de T dans
le plan projectif. Alors Tl (u1 ,v1 ,w1), T2(u2,v2,w2), T3(~,v3,w3) sont ali
gnés si et seulement si les points Pl (u1 ,v1 ,w1), P2(u2,v2,w2), P3(~,v3,w3)'
pris dans le plan projectif sont alignés.
U l'---- ...u.. ~--~ X
y w
v
vw
uw
En effet, uT = (~(2W+V),v), d'où uT1 = (V~(2W1+v1 ),v1)).::::t 1 ~ 1 ~ 1U~2 = (V3 (2w2+v2) , v2 ) et UT
3= (\7:3 (2w
3+v3),v3),donc T1T2 = (V3 ((2w 2- 2w1 )+
+(v2-v1)),v2-v1) et T1T~ = \73 ((2w3-2w1 )+(v3-v1 )),v
3-v1)· Considérons la ma-
trice :
2On a det(61) = -V3 (v2w3-v3w2-v1w3+v3w1+v1w2-v2w1). Dans le plan projectif,
le déterminant des trois points P1,P2,P3 est donné par la matrice
u2 ~
~= v2
v3
avec u. = 1-v. -w. (i = 1,2,3),l l l
w2
w3
d'où det(À 2) = v2w3-v3w2-v1w3+v3w1+v1w2-v2w1. Ceci nous dit que det(6 1) = 0 si
et seulement si det(A2) = 0 ~u ~ncore T1'~2,T3 sont alignés dans le plan affi
ne si et seulement si les points P1,P2,P3
sont alignés dans le plan projectif.
13·
3. La loi de Hardy-Weinberg
3.1. La parabole de Hardy-Weinberg
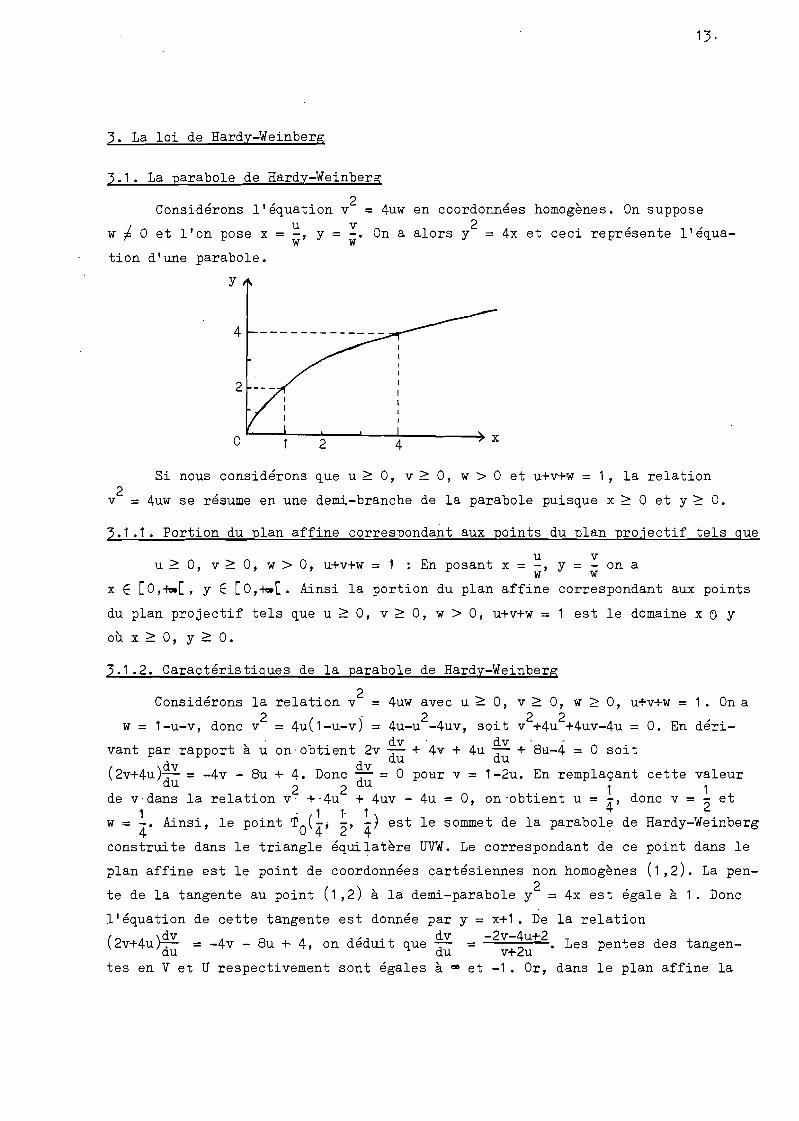
Considérons l'équation v2 = 4uw/ U vw ~ ° et l'on pose x = -, y = -. On aw w
tion d'une parabole.
y
en coordonnées homogènes. On suppose
alors y2 = 4x et ceci représente l'équa-
2 4
Si nous considérons que u ~ 0, v ~ 0, w > ° et u+v+w = 1, la relation2
v = 4uw se résume en une demi-branche de la parabole puisque x ~ ° et y~ O.
3.1.1. Portion du plan affine correspondant aux points du plan projectif tels gue
u vu ~ 0, v ~ 0, w > 0, u+v+w = 1 : En posant x = -, y = - on aw w
x E [O,~[, y E [O,~[. Ainsi la portion du plan affine correspondant aux points
du plan projectif tels que u ~ 0, v~ 0, W> 0, U+V+W = 1 est le domaine x 0 y
où x ~ 0, y ~ O.
3.1.2. Caractéristigues de la parabole de Hardy-Weinberg
2Considérons la relation v = 4uw avec li ~ 0, V ~ 0, w ~ 0, u+v+w = 1. On a
W= 1-u-v, donc v2 = 4u(1-u-v) = 4u-u2-4uv, soit v2+4u2+4uv-4u = O. En déri-
dv - dv"vant par rapport à u on-obtient 2v ~ + 4v + 4u ~ + Su-4 = ° soit
d d u u(2v+4U)d
V = -4v - Su + 4. Donc dV = ° pour v = 1-2u. En remplaçant cette valeur
u 2 2 u 1 1de v dans la relation v- +·4u + 4uv - 4u = 0, on-obtient u = 4' donc v = 2 et
W= ~. Ainsi, le point TO(~; ~, ~} est le sommet de la parabole de Hardy-Weinberg4 ..
construite dans le triangle équilatère UVW. Le correspondant de ce point dans le
plan affine est le point de coordonnées cartésiennes non homogènes (1,2). La pen
te de la tangente au point (1,2) à la demi-parabole y2 = 4x est égale à 1. Donc
11équation de cette tangente est donnée par y = x+1. De la relation
(2 )dv S '. dv -2v-4u+2v+4u --d = -4v - u + 4, on dedUlt que --d = 2' Les pentes des tangen-u u v+ utes en V et U respectivement sont égales à ~ et -1. Or, dans le plan affine la

vh -,
fest dé-
droite de pente infinie est l'axe Oy ~ui est le correspondant de VW. Donc VW
est tangent à la parabole.
w
u ----- ~ V
3.2. Etude analytique de l'application W_
On considère l'application ~ : JR3 ~~3 définie par ~(u,v,w) =(a ~,
b~) où a,h,b sont positifs dansIR et f = au+hv+bw. Cette application
finie si au+hv+bw ~ O. Donc le domaine de définition de ~ s'écrit
D =m3'{(u,v,w)I,u,v,w EJR, au+hv+bw = O} ={(u,v,w) lu,v,wE~, au+hv+bw ~ Or.~ u v w
Si l'on pose u' = a -~ v' = h -, w' = b - on a U'+VI+W' = 1. On a alors:f f f
Im(~) ç;;; {(u',v',w')ju',v',w' EIR, u'+v'+w' = 1} = A. Posons A' = {(u,v,w)1
u,v,w EIR, u+v+w = 1, au+hv+bw ~ O}. Il est évident ~ue A' C A, ~ : D ~ A et~
A' = AnD •~
3.2.1. Injectivité de ~_
L'application ~ n'est pas injective car pour tout À dansJR, À ~ 0, on a
~(u,v,w) = ~(Àu,Àv,Àw) pour tout (u,v,w) dans D •~
Etudions la restriction de ~ à A' soit ~/A' : A' ~ A. Soient (u1
,v, ,w1 )
et (u2,v2,w2) deux éléments de A' tels ~ue ~(u1'v, ,w,) = ~(u2,v2,w2). On a
w, = l-ul-vl
, w2
= 1-u2-v2•
Après arrangement, on a :
((h~b)V1+b)U2 "-(h-b)u1v2 - bU1 = 0
(a-b)v1u2
+ ((b-a)u1-b)v2 + bV1 = 0
A = ~h-bh.1 + bPosons u
(a-b hl
On a d~t (6.) = -b(au1+hv,+bW1) ~ 0 si b ~ O. Donc la restriction de ~ à A' est
une injection. En posant B = {(u,v,w)lu,v,w EJR, 0::; u,v,w::; 1, u+v+w =,} la

restriction de ~ à B devient aussi une injection car Be A'.
3.2.2. Surjectivité de ~_: D~ ~ A
Soit (u' ,v' ,w') dans A. On cherche,s'il existe, (u,v,w) dans D tel que
)u v w ~
~(u,v,w) = (u',v' ,w' • On doit avoir u' = a r' v' = h r' w' = b r avec
f = au + hv + bw. On obtient alors le système suivant
au = (au+hv+bw)u'
hv = (au+hv+bw)v'
bw = (au+hv+bw)w'
ce qui donne encore :
(au'-a)u + hu'v + bu'w = 0
av'u + (hv'-h)v + bv'w = 0
aw'u + hw'v + (bw'-b)w = 0
hu'
hv'-h
hw'
Comme d~t(6') = 0, le système d'équations se réduit à un système de deux
équations à trois inconnues qui est le suivant:
(au'-a)u + hu'v + bu'w = 0
av'u + (hv'-h)v + bv'w = 0
On distingue deux cas
au'-a1er cas : Supposons que av'
hu' bu'= = bv' ; les solutions du système sont danshv'-h
le plan a(u'-l)u + hu'v + bu'w = O. Il vient que w' = v' = u' = 0, ce qui est
impossible car u'+v'+w' = 1.
S; au'-a 1 hu' au'-a 1 bu' hu' 1 bu'2ème cas: ~ av' F hv'-h ou av' F bv' ou hv'-h r bv" le système admet des
solutions. Il vient que l-u'-v' ~ 0 ou v' ~ 0 ou u' ~ 0 soit w' ~ 0 ou v' 1= 0L L bu'ou u' r O. On supposera que w' r O. La résolution du système donne u = ---, W,
bv ' 1 awv = hw' w, où w F 0 afin que (u,v,w) soit dans D~. On a donc une infinité de so-
lutions. Si nous cherchons la solution w telle que u+v+w = 1, on obtient
ahw'w = bhu'+abv'+ahw' •
Conclusion:
La restriction de l'application ~ à A' est une bijection de A' sur A. On
voit aussi que la restriction de ~ à B est une bijection de B sur B lui-même.
3.3. Etude de ~ par les projectivités
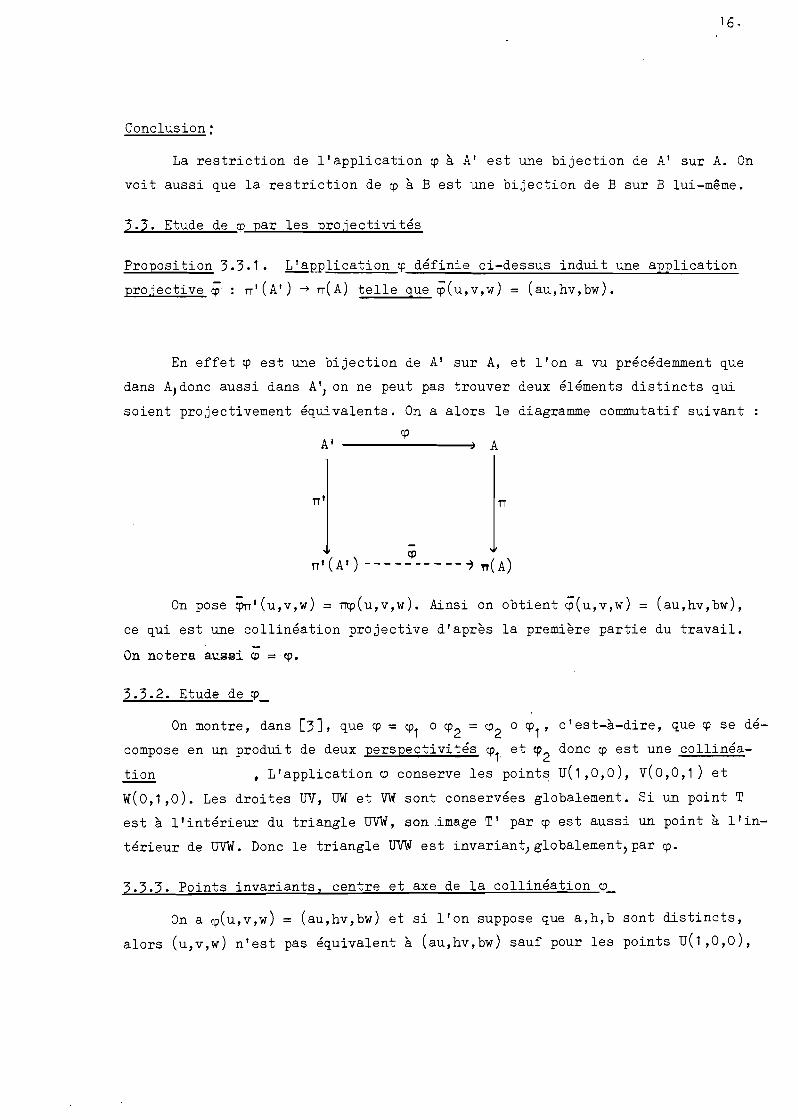
Proposition 3.3.1. L'ap~lication ~ définie ci-dessus induit une application
projective.;p: TT'(A') ~ TT(A) telle que eP(u,v,w) = (au,hv,bw).
En effet ~ est une bijection de A' sur A, et l'on a vu précédemment que
dans A,donc aussi dans A', on ne peut pas trouver deux éléments distincts qui
soient projectivement équivalents. On a alors le diagramme commutatif suivant
~-------~) A
TT' TT
cpTT'(A') ----------7 Tt(A)
On pose ~'(U,V,W) = ~(u,v,w). Ainsi on obtient eP(u,v,w) = (au,hv,bw),
ce qui est une collinéation projective d'après la première partie du travail.
On notera a~~si cp = cp.
3.3.2. Etude de ~_
On montre, dans [3J, que cp = ~1 0 ~2 = ~2 0 CP1' c'est-à-dire, que cp se dé
compose en un produit de deux perspectivités ~l et e.p2 donc ~ est une collinéa-
tion • L'application ~ conserve les points U(1 ,0,0), V(0,0,1) et
W(0,1,0). Les droites UV, UW et VW sont conservées globalement. Si un point T
est à l'intérieur du triangle UVW, son.image T' par ~ est aussi un point à l'in
térieur de UVW. Donc le triangle UVW est invariant) globalement, par ~.
3.3.3. Points invariants, centre et axe de la collinéation ~_
On a cp(u,v,w) = (au,hv,bw) et si l'on suppose que a,h,b sont distincts,
alors (u,v,w) n'est pas équivalent à (au,hv,bw) sauf pour les points U(1 ,0,0),
17 .
V(O,O,t), W(O,t ,0). Il n'y a pas de points invariants à l'intérieur du trian
gle UVW. En effet si un point à l'intérieur du triangle était invariant par ~,
celle-ci se réduirait à l'application identique car une collinéation du plan
qui admet quatre points invariants se réduit à l'application identique. Le cen
tre d'une collinéation est un point invariant, donc si ~ admet un centre, ce
lui-ci ne peut être que D,V oU,W. Montrons que ~ n'admet pas de centre. En ef
fet, si U était le centre de la collinéation ~, on aurait que toute droite qui
passe par U serait invariante. Supposons une droite D qui passe par U et soit
p(u,v,w) un point de cette droite; on a ~(p) = ~(u,v,w) = (au,hv,bw) et si D
est invariante, on doit avoir
u au
°°
v
w
hv = °bw
c'est-à-dire) (b-h)vw = 0, donc b = h, absurde car on a supposé que b ~ h.
Si b = h le centre de la collinéation est U. Si a = b le centre de la col
linéation est W. Si a = h le centre de la collinéation est V et si a = h = b,
~ est l'application identique.
Si h ~ b, ~(p) n'est pas sur la droite UP, donc U ne serait pas le centre
de la collinéation ~. En conclusion si a,h,b sont distincts la collinéation ~
n'admet pas de centre.
Montrons aussi que la collinéation ~ n'admet pas d'axe si a,h,b sont dis
tincts. En effet l'axe de la collinéation est défini comme étant la droite des
points invariants. Supposons qu'il existe une droite D dont les points sont fi-
xes.
a) Si D ~ UV,UW ou VW il existe au moins quatre points invariants et ~
est l'application identique.
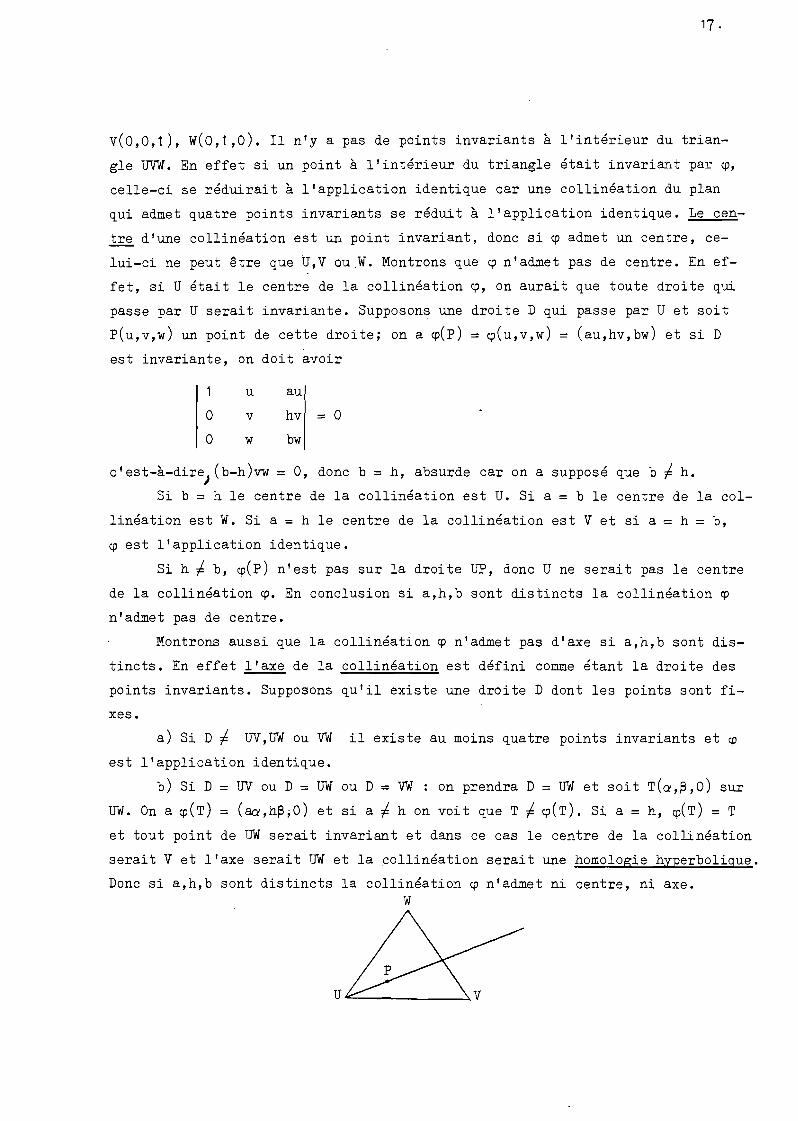
b) Si D = UV ou D = UW ou D = VW : on prendra D = UW et soit T(Q',~,O) sur
UW. On a qJ(T) = (aa,h~,O) et si a ~ h on voit que T ~qJ(T). Si a = h, ~(T) = T
et tout point de UW serai t invariant et dans ce cas le centre de la colli néation
serait V et l'axe serait UW et la collinéation serait une homologie hyperbolique.
Donc si a,h,b sont distincts la collinéation ~ n'admet ni centre, ni axe.W
UAC- ~
3.4. Transforméede la parabole de Hardy-Weinberg par ~_
3.4.1. Méthode des coordonnées non homogènes
On re~arque que le point U(1 ,0,0) de la parabole est le point à l'infini
de.la parabole. En posant x = ~, y = ~, l'application cp est représentée parA( ) ( ) (a h ) r, 2
w2 2 4cp x,y = x' ,y' = - x,- y ou cp: JR ~ TIl • Donc la demi-parabole y = x va
b b 2 4h2se transformer en y' = a b x'.
3.4.2. Méthode des coordonnées triangulaires ou homogènes
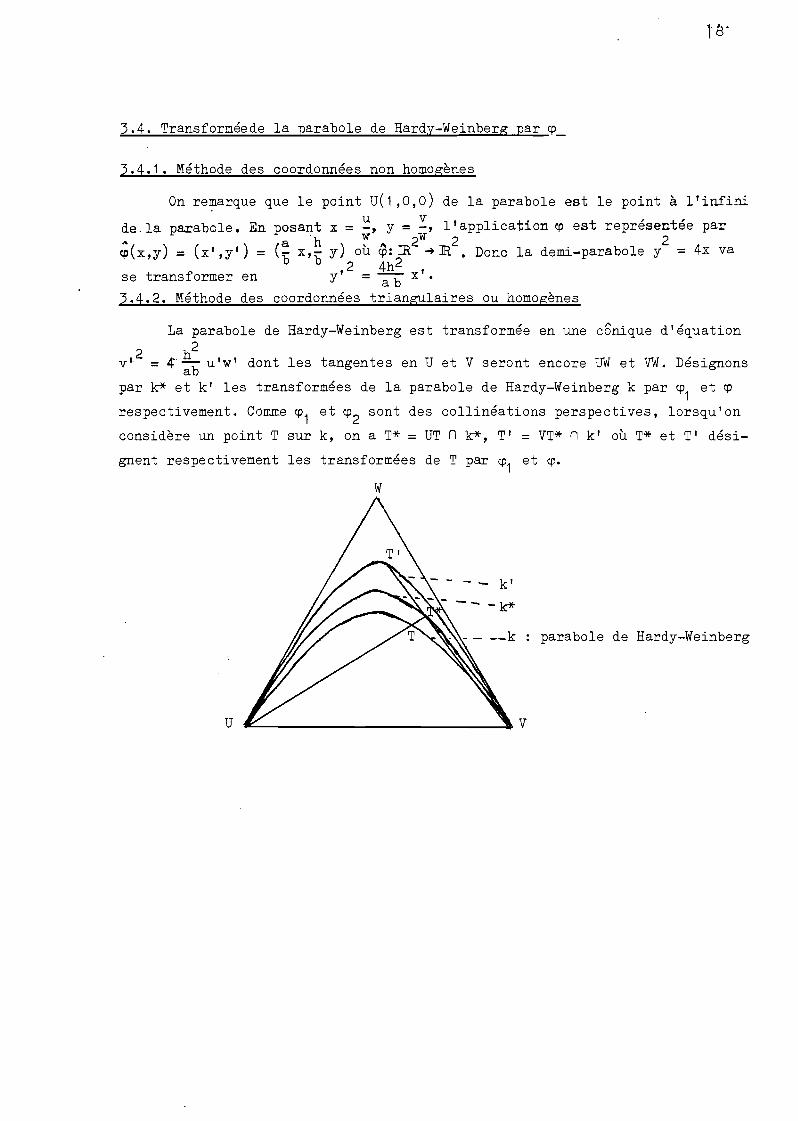
La parabole de Hardy-Weinberg est transformée en une cônique d'équation
Vl 2 = 4 ~~ u'w' dont les tangentes en U et V seront encore UW et VW. Désignons
par k* et k l les transformées de la parabole de Hardy-Weinberg k par CP1 et cp
respectivement. Comme CP1 et CP2 sont des collinéations perspectives, lorsqu'on
considère un point T sur k, on a T* = UT n k*, T' = VT* n k' où T* et TI dési
gnent respectivement les transformées de T par C+J1 et cp.
W
U ~-------------JI, V
parabole de Hardy-Weinberg

3.5. Applications à la génétique
3.5.1. Détermination des points d'équilibre sur la parabole de Hardy-Weinberg
u v
v vPosons p = u + 2' q = w + 2 de sorte que u+v+w = 1. En considérant la per-
pendiculaire à U à UW on voit que la projection de K sur UL détermine q = UR.
On peut alors dire que les points de même fréquence sont sur la même perpendicu
laire à UV et réciproquement les points qui se trouvent sur une même droite per
pendiculaire à UV ont les mêmes fréquences. Un point T est dit point d'équilibre
si la fréquence de T est égale à celle de TI = ~(T). Nous devons alors avoirA
TT' perpendiculaire à UV. On cherche alors le point T qui est sur la parabole
de Hardy-Weinberg k tel que TT' soit perpendiculaire à UV ou bien encore enA A AA· A
désignant par K la projection de T sur UV on doit avoir T,T',K alignés. Cela
se traduit parA A
P u auA
0 v hv = 0A
q w bw
,,2avec u = p
h-aq = 2h-a-b •
h-b-- et comme. p + q =h-a 1, on a p h-b= 2h-a-b'

20.
3.5.2. Calcul de la limite de qP(u,v,w) où u ~ 0, v ~ °On a ~(u,v,w) = (a ~, h ~, b ~) = (u',v' ,w') avec f = au + hv + bw et
2() ) (U' VI WI)~ u,v,w = ~(u',v' ,w' = a fT' h fT' b fï avec fI = au' + hv' + bw',
( ) ( a ( U) h ( v) b ( W)) (a2u h2v
b2W) .~ u' ,v' ,w' = fT a f 'fT h f 'fT b f = ff" ff" ffI . On VOlt donc que
~(u,v,w) est équivalent à (au,hv,bw,1' Donc ~2(u,v,w) est équivalent à
( 2 2· 2 ), / . . n( ) (n n n) .a u,h v,b w • Par recurrence on f?tlent ~ u,v,w = a u,h v,b w . Sl h = 1,n( ) (n n) S. / 0'· ( n n ) ,. , ((a)n u 1 v )
~ u,v,w = a u,v, b W. l W r,' on a .' a u,v, b."f équi.vaLen t a b w' bn w,1
a) Supposons que a > 1, b > 1. On a lim~~fu,v,w) = (lim(-ba)n w~,0,1).n~-h>J
w~O' '
i) Supposons a> b. Alors lim ~n(u,v,w) =(+0\0,1) = (M,0,1) où M estn~+<»
w~O
très grand. Or (M,0,1 )~(1 ,O,~), Lorsque M est très grand (1 ,O,~) est équivalent
() n() - ( )à 1,0,0 = U. Donc lim ~ u,v,w = 1,0,0 = U quand a > b.n-lOO
w~O
ii) Supposons a < b. Alors lim ~n(u,v,w) = (0,0,1) = V.n-to"w~O
iii) Supposons a = b. Alors lim ~n(u,v,w) = (~,0,1) = (u,O,w).n-t"" ww~O
Si l'on pose T = (u,v,w), alors le point (u,O,w)
section de WT avec UV.
est l'inter-
iv) Supposons w = O. On a lim ~n(u,v,O) = lim (anu,v,O) =n-rce n~
lim (1 ,-Z-,O) = (1,0,0) = U.n~ na u
b) Supposons a < 1, b < 1, h = 1.
i) Si a > b, lim ~n(u,v,w) = ljm ((~)n ~,~ ~,1) = (œ,00,1) = (1 ,1 ,O)~n ~+oil n +co b w bn ww~O w~O
ii) Si a < b, lim ~n(u,v,w) = (0,00,1) = (0,1,0) = W.n~OI:l
w~O
21
iii) Si a = b, lim ~n(u,v,w) = (~,œ,1) = (0,1,0) = W.n""*OO wwJ,O
iv) Si w = 0, lim ~n(u,v,O) = lim (anu,v,O) = lim (1 ,-Y-,O) =n~ n~ nr-t+OII na u
... (1,011,0) = (0,1,0) = w.
c) Supposons a < 1, b > 1. AlorSnl~fooc+Jn(u,v,w)= (0,0,1) = V.
wJ,O
lim ~n(u,v,O) = lim (anu,v,O) = (O,v,O) = (0,1,0) = W.n~-t- n~-+oo
d) Si a> 1, b < 1, Jj~c+Jn(u,v,w) = (00,00,1) = (1,1,0)
wJ,O
lim ~n(u,v,O) = lim (anu,v,O) = (oo,v,O) = (1,0,0) = U.n ~+o:i n ~+.,..
3.5.3. Calcul de la limite de wn(u,v,w) dans le cas où l'une au moins des va-
leurs u ~ v est nulle
a) Supposons u = 0, v J, O. On a ~n(O,v,w) = (O,v,bnw).
i) Si b < 1, n-U:tg. cpn( 0, v, w) = (0, v, 0) "" (0,1 ,0) = W.
wJ,O
ii) Si b > 1, n-H~ ~n(O,v,w) = (°,v ,+ e<.» rv (0,°,1 ) = V.
wJ,O
iii) Si b = 1, rJim cpn(O,v,w) = (O,v,w).+OIJ
wJ,O
iv) Si w = 0, ~n(O,v,O) = ~n(0,1 ,0) = (0,1,0) = W.
b) Supposons u J, 0, v = O. On a ~n(u,O,w) = (anu,O,bnw) ~ ((Ê)n ~,0,1) si
w J, O.
i) Si a < b, rJ~ cpn(u,O,w) = (0,0,1) = v.wJ,O
ii) Si a > b, n#~ ~n(u,O,w) = (+~,0,1) ~ (1,0,0) = Uo
wJ,O
iii) Si a = b, lim cpn(u,O,w) = (~,0,1) = (u,O,w).!rH-<1> W
wJ,O
iv) Si w = 0, (u,v,w) = (u,O,O) '"V (1,0,0) = U.

22.
c) Supposons u = 0, v = 0, w ~ O. Alors (u,v,w) = (O,O,w) = (0,0,1) = V,
alors on a nli~ ~n(0,0,1) = (0,0,1) = V.
3.5.4. Positions relatives de k,k*,k'
Pour déterminer laquelle des deux cbniques k et kt est au-dessus il faut• 2
t d ~ 0 2 ,2 4h " Lcalculer les hauteurs des somme s es conlques v = 4uw et v = --- u w. es. absommets des deux côniqùes sont situés sur l'axe de symétrie. Donc si l'on dési-
2 2gne par (uO,vo,wO) le sommet de k on a : vo = 4u
Oet va = 1 - 2uO ~ 2uO = 1 - 2uO. Donc 4uO = 1, soit ua =même, si (u'O,v'O,w'O) désigne le sommet de k ' on a
v' = ~= ~ = ~ si h = 1. Pour k* on obtient v*O = l' ~a' Donc on° h+' a 1. a 1+ ab ~,+ h
do i t 1, 1 v* 1_Ol comparer vo = 2' v °= 1+~' °- 1+Ja'
r.::"i: 1 1· Si b > 1, alors Ja <;ab, donc 1+Ja < 1+tab, soit --- ~ et k* est au-1+/a »< '1 +.j'à5
dessus de k' .
· Si b < 1, k* est au-dessous de k '.
Si a> 1 , a 1+Ja > 2, donc 1 1soit k est au-dessus· on ---< 2' de k*.1+Ja
· Si a< 1, k est au-dessous de k*.
· Si ab > 1 , kt est au-dessous de k.
· Si ab < 1 , k' est au-dessus de k.
Quelques exemples
1) a < 1, b < 1, h = 1; on a alors ab < 1, donc 1+;a:b < 2. Alors ~ > ~ et1+ ab 2
k' et k* sont donc au-dessus de k.
2) a>1, b>1, h= 1; ona donc ab>2, 1+;ab> 2, soit 1+~<; et k' est
au-dessous de k. De même, k* est au-dessous de k, donc k' et k* sont toutes au
dessous de k.
3) a > 1, b < 1, h = 1 ou a < 1, b > 1, h =
a) Supposons a > 1, b <
k est au-dessus de k* et k* est au-dessous de kt.
23.
• Si ab < 1, k' est au-dessus de k. Alors k* au-dessus de k et k au-dessous de k'.
• Si ab > 1, k' est au-dessous de k. Donc k* est au-dessous de k' et k' en-
dessous de k, soit k* < k' < k.
b) Supposons a < 1 , b > 1 , h = 1-
Comme a< 1, alors k < k*. De même on a k* > k' car b > 1 .
Si ab < 1 , alors k' > k, donc k < k' < k*.
· Si ab > 1, alors k' < k , donc k'<k<k*.
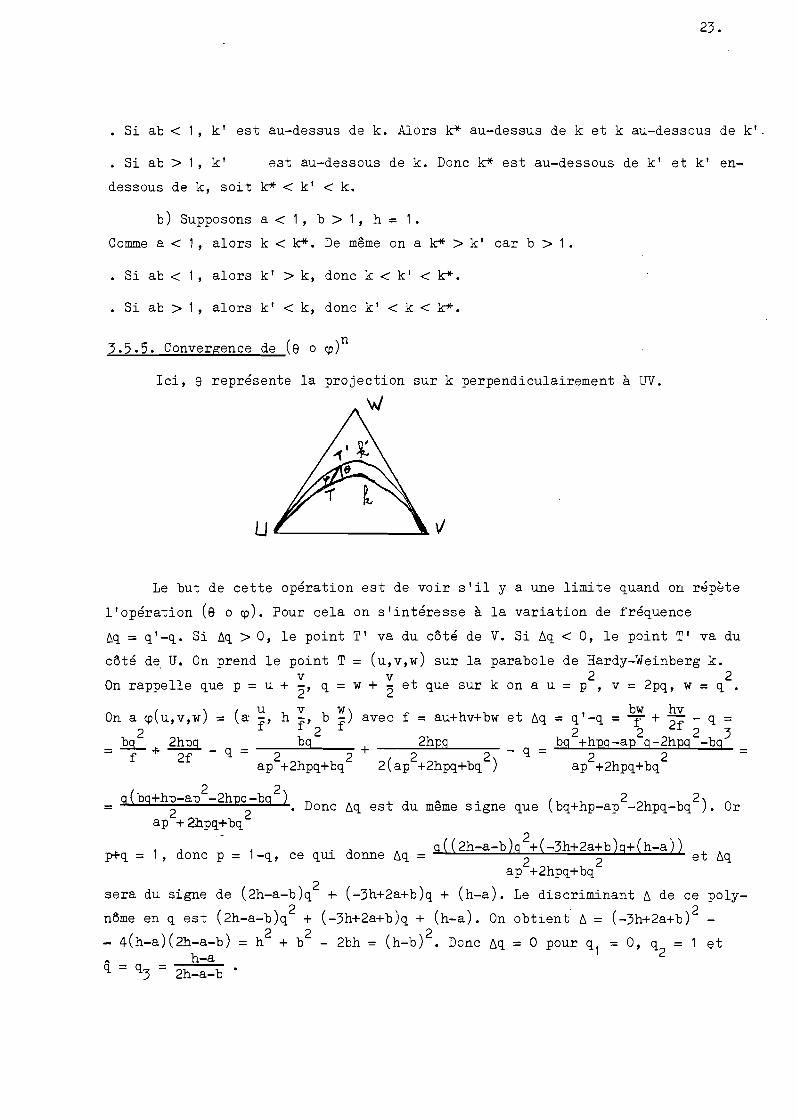
3.5.5. Convergence de (e 0 ~)n
Ici, e représente la projection sur k perpendiculairement à uv.
u"'------.......m.
Le but de cette opération est de voir s'il y a une limite quand on répète
l'opération (e 0 ~). Pour cela on s'intéresse à la variation de fréquence
6q = q'-q. Si 6q > 0, le point T' va du côté de V. Si 6q < 0, le point T' va du
côté de U. On prend le point T = (u,v,w) sur la parabole de Hardy-Weinberg k.v v 2 2
On rappelle que p = u + 2' q = w + 2 et que sur k on a u = p , v = 2pq, w = q
On a ~(u,v,w) = (a ~, h !, b !) avec f = au+hv+bw et 6q = q'_q = b; + hv - q =2 f f 2 f 2 2 2f 2 3
_ ~ ~ bg + 2hpg bg +hpg-ap g-2hpg -bg- f + 2f - q = 2 2 - q = 2 2 =
ap +2hpq+bq 2(ap2+2hpq+bq2) ap +2hpq+bq
__ g(bg+hp_ap2_2hpg_bg 2) ( 2 2)2 2 Donc 6q est du même signe que bq+hp-ap -2hpq-bq . Or
ap + 2hpq+bq
9 (( 2h-a-b)g 2+( -3h+2a+b)q+(h-a))p+q = 1, donc p = 1-q, ce qui donne 6q = 2 2 -- - -- et 6q
ap +2hpq+bq
sera du signe de (2h_a_b)q2 + (-3h+2a+b)q + (h-a). Le discriminant 6 de ce poly
nôme en q est (2h-a_b)q2 + (-3h+2a+b)q + (h-a). On obtient' 6 = (-3h+2a+b)2 -
- 4(h-a)(2h-a-b) = h2
+ b2
- 2bh = (h_b)2. Donc 6q = 0 pour q1 = 0, q2 = 1 etA h-aq = q3 = 2h-a-b •
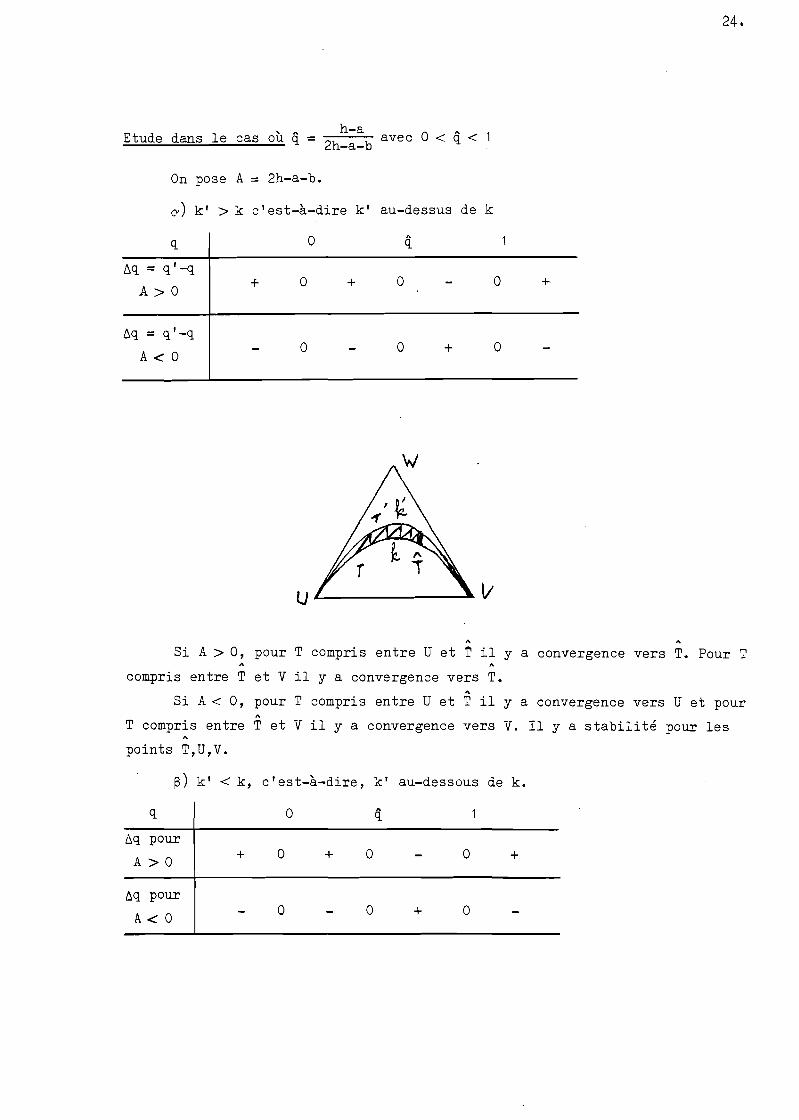
Etude dans le cas où
24.
On pose A = 2h-a-b.
ry) k' > k c'est-à-dire k' au-dessus de k
q
6q = q'-q
Â>O
6q = q'-q
A<O
+
o
o
o
+ o
o +
o
o
+
uL------V
A
Si A > 0, pour T compris entre U et ~ il Y a convergence vers T. Pour T
compris entre T et V il Y a convergence vers T.A
Si A < 0, pour T compris entre U et T il Y a convergence vers U et pourA
T compris entre T et V il Y a convergence vers V. Il y a stabilité pour les
points T,U,V.
~) k' < k, c'est-à-dire, k' au-dessous de k.
q
~q pour
A>O
M pour
A<O
+ o
o
o
+ o
o +
o
o
+
25.
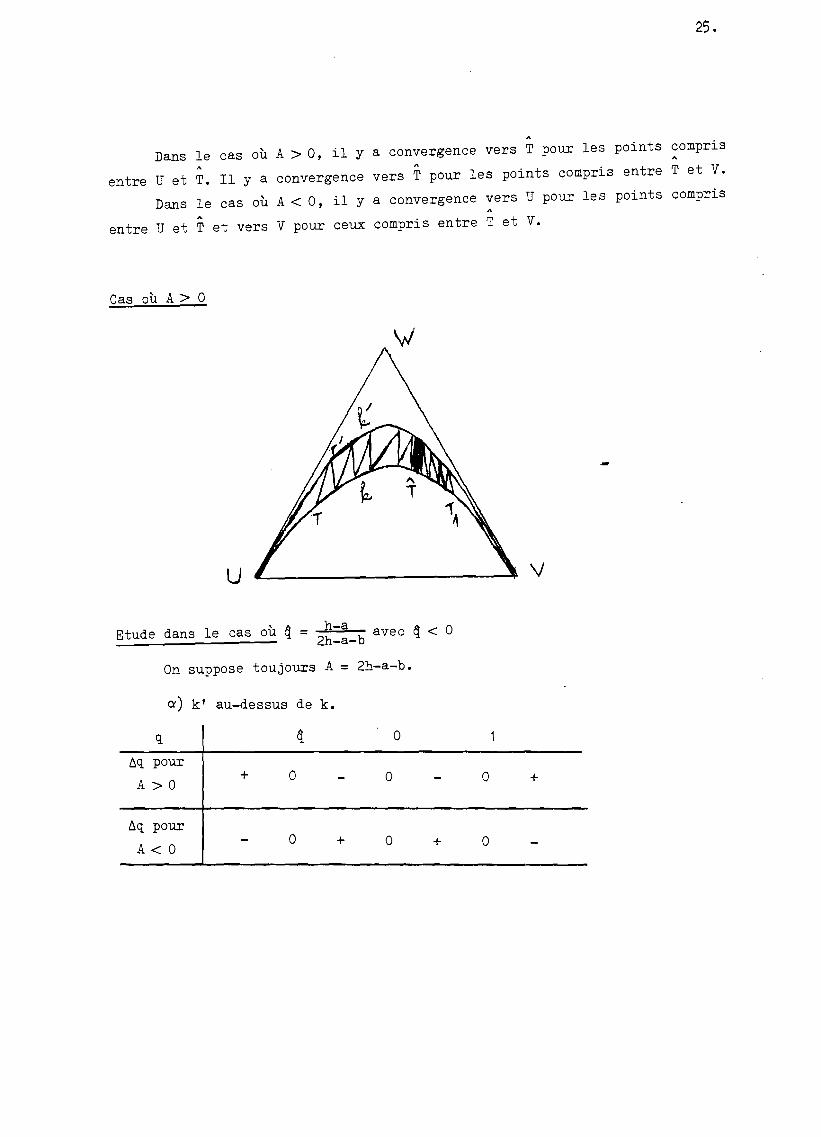
Dans le cas où A > 0, il Y a convergence vers T pour les points compris"-
"-
entre U et T. Il Y a convergence vers T pour les points compris entre T et V.
Dans le cas où A < 0, ily a convergence vers U pour les points compris,.
entre U et T et vers V pour ceux compris entre T et V.
Cas où A> 0
u v
Etude dans le cas où q = h-a avec q < 02h-a-b
On suppose toujours A = 2h-a-b.
a) k' au-dessus de k.
q
M pour
A> 0
~q pour
A<O
+ o
o +
o
o
o +
o
o
+
26.
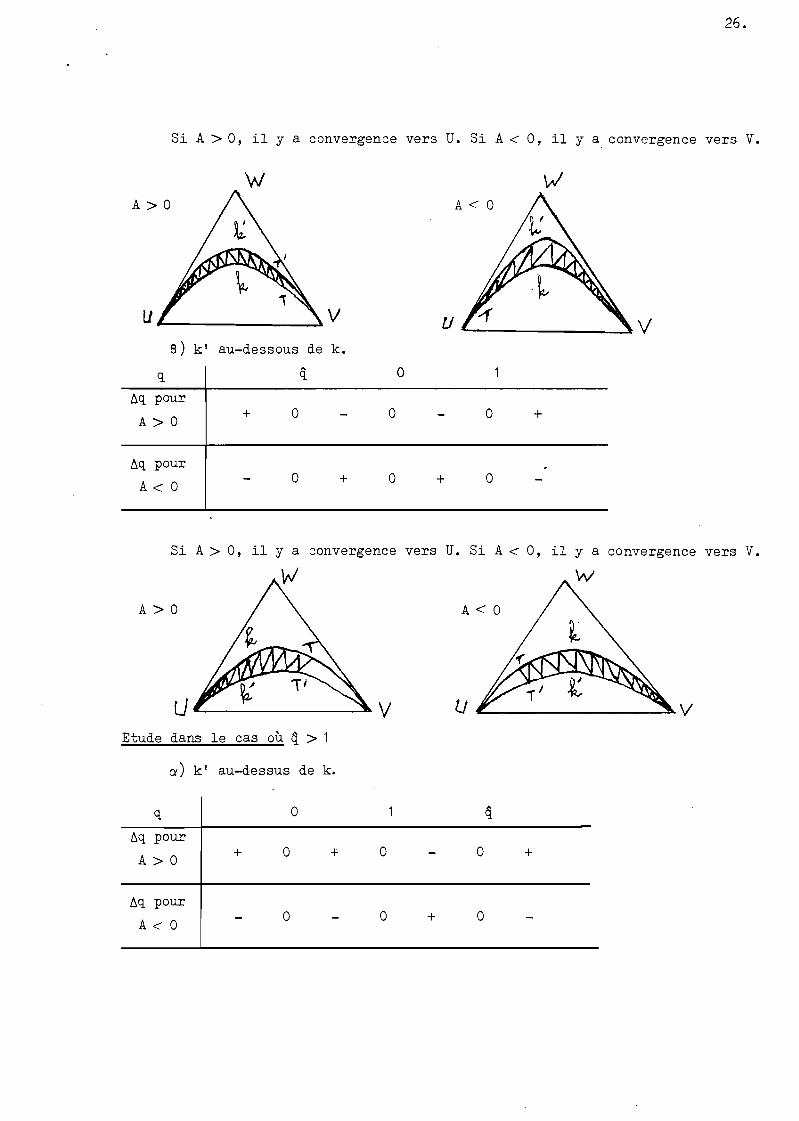
Si A > 0, il Y a convergence vers U. Si A < 0, il Y a. convergence vers V.
w
u V U V~ ) kt au-dessous de k.
q q 0
t1q pour
A>O + 0 0 0 +
t1q pour
A<O0 + 0 + 0
Si A> 0, il Y a convergence vers U. Si A < 0, il Y a convergence vers V.
A>O
u V U V
Etude dans le cas où q > 1
cr) k' au-dessus de k.
0,.
q q
t1q pour
A>O + 0 + 0 0 +
t1q pour
A<O 0 0 + 0
27.
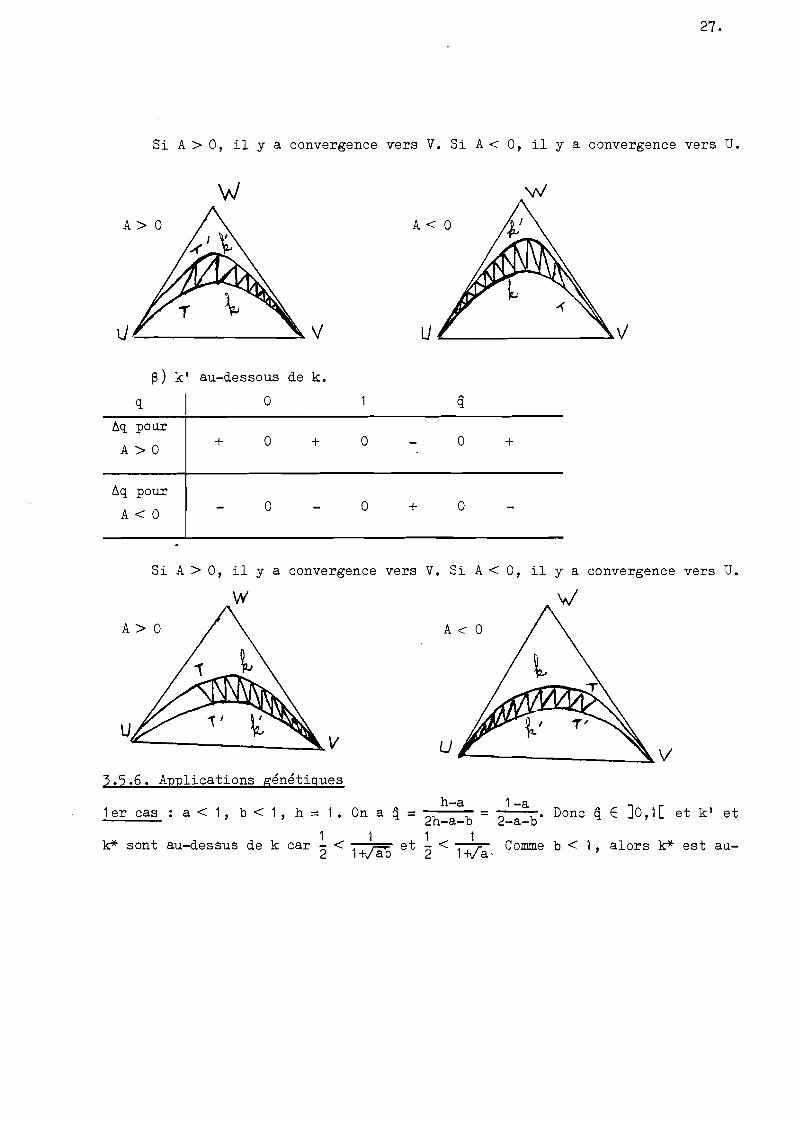
Si A> 0, il Y a convergence vers V. Si A < 0, il Y a convergence vers U.
li V U V
~) k' au-dessous de k.
0 A
q q
tlq pour
A>O+ 0 + 0 0 +
~q pour
A<O 0 0 + 0
Si A > 0, il Y a convergence vers V. Si A < 0, il Y a convergence vers U.
U-----_---.::~V
3.5.6. Applications génétiques
u ~v
1er cas
k* sont
: a<1, b<1, h==1.
1au-dessus de k car 2 <
h-a 1-aOn a q == ------- == Donc q E JO,1[ et kt et2h-a-b 2-a-b·
1 1<_1_ 11+j"à5 et 2 1-h/a- Comme b < ,alors k* est au-

28.
dessous de kt. Nous avons A = 2h-a-b = 2-a-b > O. Donc il y a convergence vers,.T de fréquences p et ~ avec p = 1-~.
uL-------v2ème cas : a > 1, b > 1, h = 1. On a A = 2h-a-b = 2-a-b < 0; h-a = 1-a < O.
h-a h-aDonc ~ = 2h-a-b = (h-a)+(h-bY > 0, soit °< q< 1 et k' et k* sont au-des-
sous de k. Il Y a convergence vers U et V. Le point T est fixe par 8 0 ~.
u-------~V
3ème cas : a < 1, b > 1, h = 1 ou a > 1, b < 1, h = 1 •
1-b> 1. Il Y a alors con1-1-":--
1-a
h-a 1-a 1-a= 2h-a-b = 2-a-b = (1-a)+(1-b) =
1
Supposons que a < 1, b > 1, h = 1. On a q1 1-b1-b et 1-b < 0, 1-a > 0, donc 1-a < 0, soit q =
1+-1-a
vergence vers U ou V.
u'------~v
29.
3.6. La loi de Hardy-Weinbe"g et algèbres génétigues
On se bornera ici à des algèbres génétiques particulières que nous appe
lerons algèbres gamétiques. Soient~[XO,X1 , ... ,XnJ laIR-algèbre des polynômes
en les indéterminées XO"."Xn à coefficients dansill et A = G(n+1,2m) le sous
-~-es~ace v~ctoriel deTI{XO,X1, ..• ,xnJ ayant une base formée par les monômes1 0 1 1 ln n
Xo X1
".Xn
tels que ~O i k = m. La structure d'algèbre de A est donnée par
la table de multiplication suivante:
avec
(i=
i +j 10
11
1( n n) n• • . 1 Xo X1 .••Xnn
On obtient ainsi sur A = G(n+1,2m) une structure deIR-algèbre commutative
non associative et sans élément unité. On dira que A = G(n+1,2m) est l'algèbre
gamétigue d'une population 2m-ploïde avec n+1 allèles.
3.6.1. Cas particulier
Si n = 1, A = G(2,2m) est une algèbre gamétique d'une population 2m-ploïde, , m-i i
deux alleles, la base naturelle de A surIR est donnee par ei
= Xo X1
O, ••• ,m) et la table de multiplication de A relativement à cette base s'é-
crit
e. e.1 J
e.e.1 J
0, .•• ,m).
En posant y. (2m)-1(i+ j)(2m-i_j) on a alorsijk = m k m-k
meie j = k~O ~ijkek avec
m0$ Yljk $ 1 quels que soient i,j,ket k~O Yi j k = 1 quels que soient i,j.
30 ..
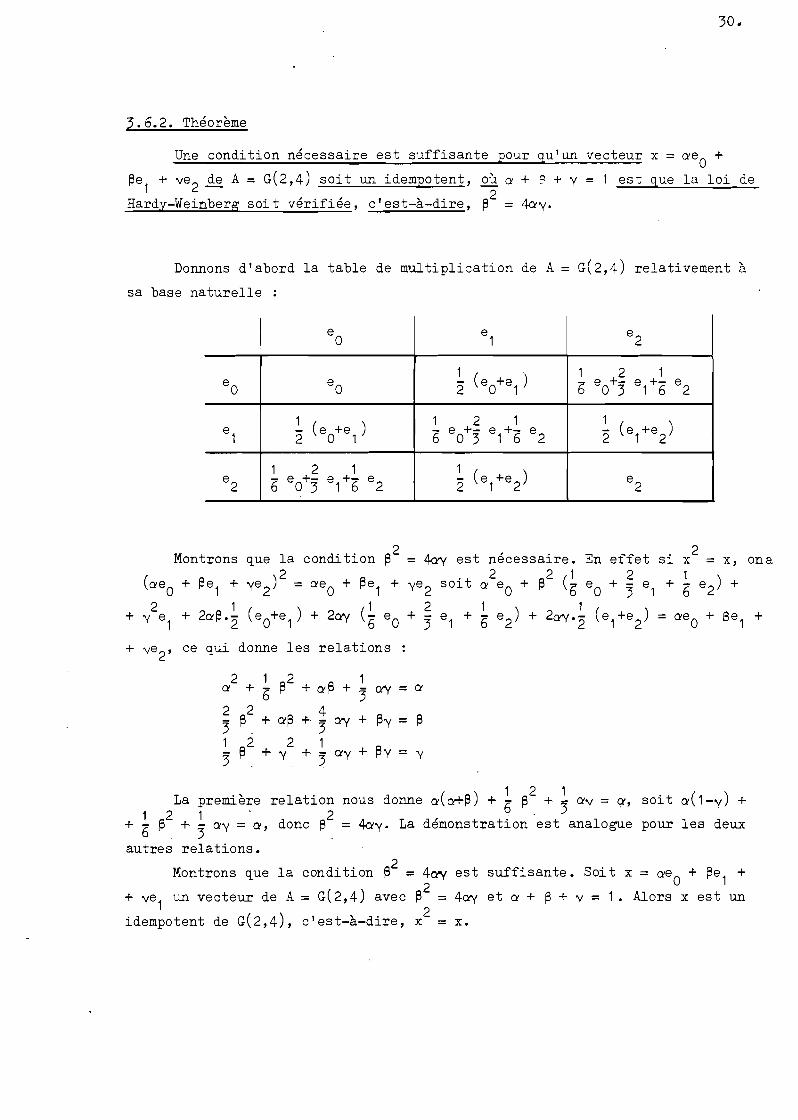
3.6.2. Théorème
Une condition nécessaire est suffisante pour qu'un vecteur x = aeO
+
~e1 + ye2 de A = G(2,4) soit un idempotent, où a + e + y = 1 est que la loi de2
Hardy-Weinberg soit vérifiée, c'est-à-dire, ~ = 4ay.
Donnons d'abord la table de multiplication de A = G(2,4) relativement à
sa base naturelle :
eo e1
e2
1(e
O+e1) 1 2 1
eOeo 2 b e +- e 1+6'
e2o 3
1 1 2 1 1(e
1+e2)e
1- (e +e )
6'e +- e +- e
2 22 0 1 o 3 1 6
1 2 1 1(e1+e)
e2 6'
e +- e +- e2 2 e
2o 3 1 6
Montrons que la condition ~22
(aeo + ~e1 + ye 2) = aeO +
+ y2e1 + 2a~.~ (eO+e1)+ 2ay
ye 2 soit
2:3
+ ye2,
ce qui donne les relations :
212 1a + 6 ~ . + a~ + 3 ay = a
2243 ~. + a~ + 3 ay + ~y = ~
1 2 2 1- ~ + y + - ay + ~y = y3. 3
)1 2 .
La première relation nous donne a(a+~ + 6 ~. + 3 av = a, soit a(1-v) +
+ ~ ~2 + ~ ay ='a, donc ~2 = 4ay. La démonstration est analogue pour les deux
autres relations.
Montrons que la condition ~2 = 4œv est suffisante. Soit x = aeO
+ ~e1 +2
+ ye1
un vecteur de A = G(2,4) avec ~ = 4ay et a + ~ + y = 1. Alors x est un
idempotent de G(2,4), c'est-à-dire, x2
= x.
31.
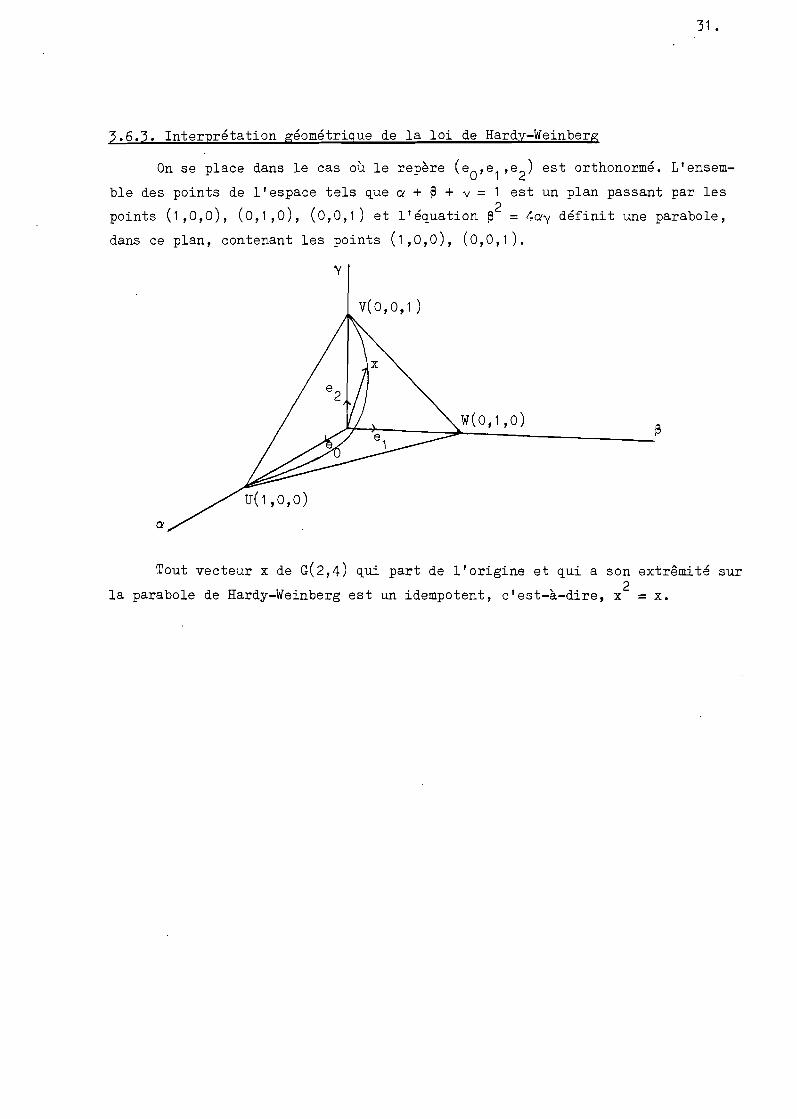
3.6.3. Interprétation géométrique de la loi de Hardy-Weinberg
On se place dans le cas où le repère (eO,e1,e2)est orthonormé. L'ensem
ble des points de l'espace tels que a + ~ + y = 1 est un plan passant par les
points (1,0,0), (0,1,0), (0,0,1) et l'équation ~2 = 4ay définit une parabole,
dans ce plan, contenant les points (1,0,0), (0,0,1).
y
v( 0,0,1 )
W(0,1,0)
Tout vecteur x de G(2,4) qui part de l'origine et qui a son extrêmité sur
la parabole de Hardy-Weinberg est un idempotent, c'est-à-dire, x2 = x.
32.
4. Sur quelques modèles génétiques d'après r.M. YAGLOM
4.1. Premier modèle
Considérons l'application ~ R3 ~ m3 définie par ~(d,h,r) = (d',h' ,r') =
=((d~)2, 2(d+~)(r+~),(~)2), pour tout élément (d,h,r) delli3.
Proposition 4.1.1.
1) L'application m est une forme quadratique dégénérée.
2) En posant W(x,y) = ~(x+y) - cp(x) - cp(y), l'élément Xo de:œ.3 tel que
Hxo'Y) = 0 pour tout y dans:œ.3 appartient à R1
= {(d,h,dl(d,h,r) E JR3 , d+h+r= oL
3) L'application ~ est une projection orthogonale à UV ~ ~ transforme le
triangle équilatère UVW en la parabole de Hardy-Weinberg h,2 = 4d'r'.
21) On vérifie facilement que ~(~x) = ~ ~(x) pour tout ~ dans:œ., et pour
tout x dans:JR3 et que l'application W ::JR3 x:JR3 ~:œ.3 telle que W(x,y) =cp(x+y)
-~(x) - ~(y) quels que soient x,y danslli3 est:œ.-bilinéaire. On cherche, s'il
existe, Xo E:JR3 tel que w(xo'y) = 0 pour tout y dans:œ.3 . Or, w(xo'y) =~(xo+y )
- ~(xO) - ~(y). Posons Xo = (dO,hO,rO)'y = (d,h,r). Alors w(xo'y) = (((dO+d)'
- dO'-d'),((hO+h)1 - hO'-h'),((rO+r)' - rO'-r')) = (X,Y,Z) et w(xo'y) = 0 est
équivalent à X = 0, y = 0, Z = 0 avec:hO+h 2 hO 2 h 2
X = (dO+d+-2-) - (dOS) - (d~)
( ( hO) ( h) )2 ( hO )2 _ (d-'-~) 2= dO~ + d~ - dO+;2 '2
2 h- Cl' = 0 avec Cl' = d~, Cl'O
0, ce
tient 2~0~ = 0 pour tout ~
= 0 pour tou t Cl'.= 20'Cl'0
ho+-=2
hqui -donne -2-0 = - dO ou hO = - 2d
2. Pour Z = 0, on ob-
avec ~ = r + ~, d' où ~ 0 = r O + 20
= 0, soit dO = "oPour Y = 0, on obtient y = 2(ao~+a~0) = 0 quels que soient a et ~, donc
hO hO.Cl'O = f
O= 0, c'est-à-dire, dO + :2 = 0 = r O +~. Flnalement on a Xo = (do,ho,ro ) =
= ~dO,-2dO,dO)' Dés lors ~ est une forme quadratique dégénérée.
33.
2) Il est évident que Xo est dans R1 car la somme des éléments dO' -2dOet dO est nulle.
3) Pour la démonstration, onrenvoie, à [ 8 ] .
2(d+~)(r~)-h = 2dr + dh +
4dr+2dh+2rh+h2-2h h2+4dr+2h(d+r-1)2 = 4=
En effet h'-h =
Proposition 4.1.2.Si un point T = (d,h,r) est au-dessus (respectivement au-des
sous) de la parabole de Hardy-Weinberg on a hl < h (respectivement h' > h).
h2
rh + 2'" - h
=h2+4dr_2h2
4
2-h +4dr
= 4
donc h' < h si et seulement si h2 > 4dr ou encore, si et seulement si Test au
dessus de la parabole de Hardy-Weinberg. La démonstration est analogue pour
h ' > h ,4.2. Deuxième modèle
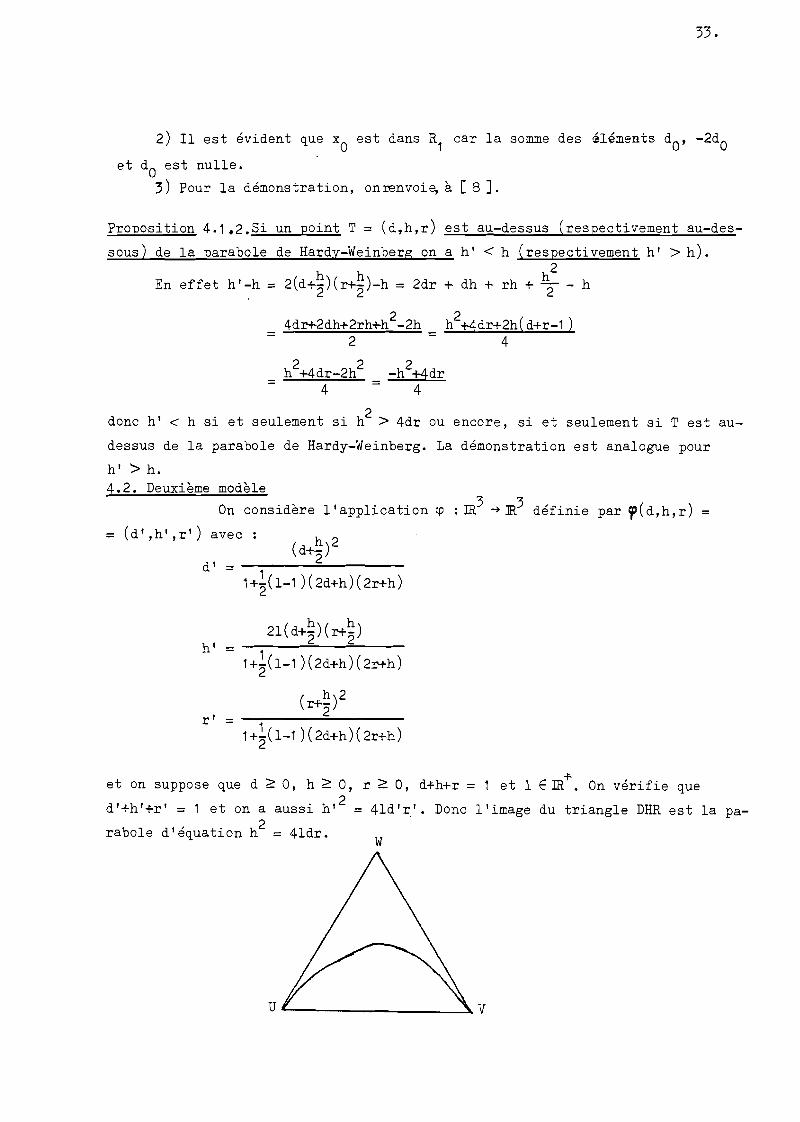
On considère l'application ~ : IR3 ~E3 définie par f(d,h,r) == (d',h',r ') avec:
(d~)2
1~(1-1 )(2d+h)(2r+h)
21(d+~)( r+~)h' = ----=----=----
1+;(1-1)(2d+h)(2r+h)
(r+!:)22r' = ----~=------
1+;(1-1 ) (2d+h)(2r+h)
w
+et on suppose que d ~ 0, h ~ 0, r ~ 0, d+h+r = 1 et lE IR • On vérifie que
d'+h'+r' = 1 et on a aussi h , 2 = 41d 'r'. Donc l'image du triangle DHR est la pa
rabole d'équation h2 = 41dr.
UL- ~v

34.
Remarque 4.2.1 .Si l'on pose D = 1 + 1;1 (2d+h) (2r+h) on aD> 0 quelque soit
l Em+. En effe~, si l'on pose p = d + ~ et q = r + ~ on a D = 1+2(1-1 )(d+~)(r+~
= 1+2(1-1 )p(1-p) = -2(1-1 )p2 + 2(1-1)p + 1. Posons f(p) = D et calculons le
discriminant ~, de f(p) : 6' = (1_1)2 + 2(1-1) = (1-1 )(1-1+2) = (1-1 )(1+1).
Si 0 ~ l < 1, alors 6' < 0, donc D est du même signe que -(1-1), c'est-à-dire,
D > O. Si l ~ 1, il est évident que D > O.
Proposition 4.2.2.Pour tout élément l dansIR+~ d > r (respect. d < r) si et
seulement si d' > r' (respect. d' < rI), ou encore, d-r et d'-r' sont de même
signe.
En effet, d'-r'
(d+h+r) (d-r)
h h1+2(1-1 )( d+2)(r+2)
=
d '-r' 1où D est définie précédemment donc D > O. Alors = D- > 0, donc d-r et d'-r'd-rsont de même signe.
4.2.3, Calcul de p '-p
h h' h' (hOn a p = d + 2' p' = d' + 2' avec d+h+r = 1, donc p'_p = (d'+2"') - d+2) == (d,+1-d~-rl) _ (d+1-~-r) = (d'-r');(d-r), soit le signe de p'-p est le même
que celui de (d'-r') - (d-r).
Remarque 4.2.4. Supposons deux points T et T' de fréquences respectives p et p'.
Si p' < p cela veut dire que le point T' se -trouve à droite de la perpendiculai
re à UV passant par T. Si p' > P il se trouve à gauche de la perpendiculaire à
UV passant par T.
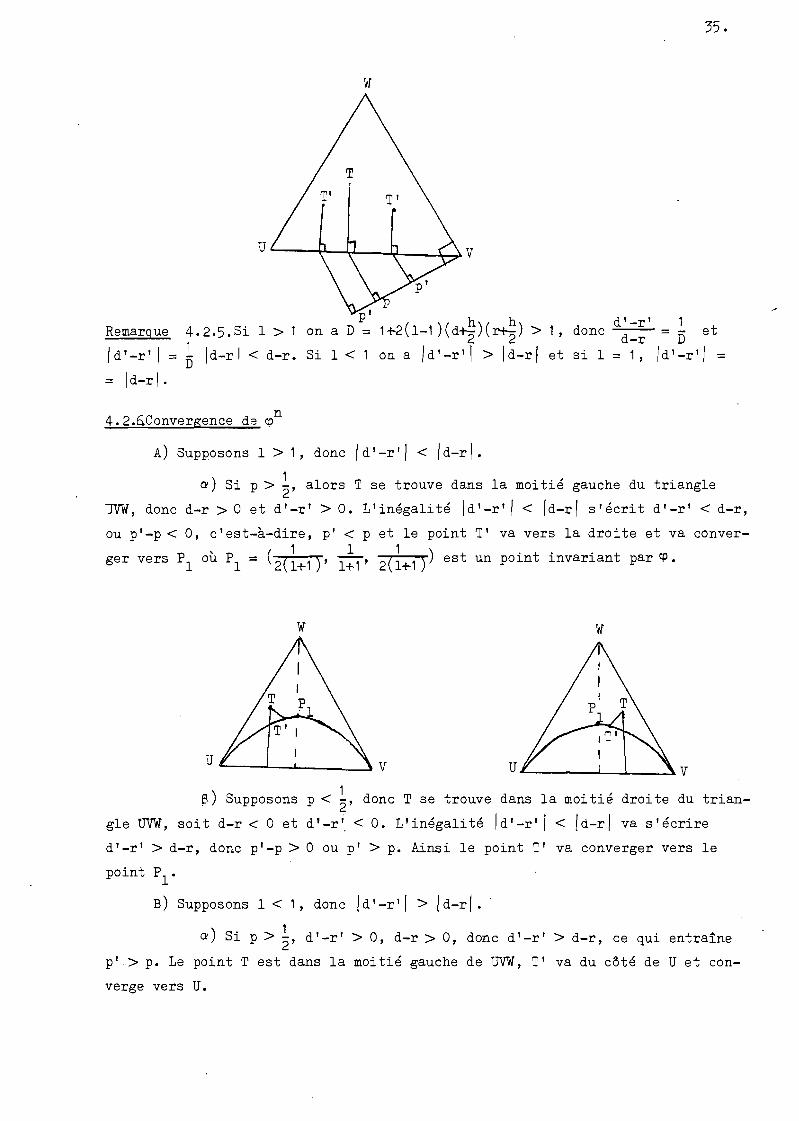
Remargue 4.2.5.Si 1 > 11
1 d' -r' 1 = fi 1d-r 1 < d-r.
= Id-ri·
n4.2.&Convergence de ~
35.
p' h h d '-r' 1on a D = 1+2(1-1 )(d~)(~) > 1, donc d-r = fi et
Si 1 < 1 on a Id'-rll > Id-ri et si 1 = 1, Idl-r'i =
A) Supposons 1 > 1, donc rdl-rll < Id-ri.
Q) Si p> ;, alors T se trouve dans la moitié gauche du triangle
UVW, donc d-r > ° et d'-rI> O. L'inégalité Id'-rll < Id-rI s'écrit d'-rI < d-r,
ou p'-p < 0, c'est-à-dire, p' < P et le point T' va vers la droite et va conver-
ger vers Pl où Pl = (2(~+1 ), 1~1' 2(~+1 )) est un point invariant par~.
w
U ~---L_..l.- 3 V u""-- .l-~_--3.V
S) Supposons p < ~, donc T se trouve dans la moitié droite du trian
gle UVW, soi t d-r < ° et d' _ri. < O. L' inégali té 1d' -r' 1 < 1d-r 1 va SI écrire
d'-rI > d-r, donc p'-p > ° ou p' > p. Ainsi le point T' va converger vers le
point Pl'
B) Supposons 1 < 1, donc Id'-r'l > Id-rI.
Q) Si P > ~, dI_rI > 0, d-r> 0, donc d'-r' > d-r, ce qui entraîne
p'.> p. Le point T est dans la moitié gauche de UVW, T' va du côté de U et con
verge vers U.

36.
c) Sl' P < 21, en ope'rant comme 1 . d t TIf' es cas Cl- essus, on mon re que
converge vers V.w
U e---_....!.J..-__..J..L__~ V
p(P+1(1-p))= Dpl =
4.2,1.Variation de pl en fonction de p
hl (d~)2 1(d~)(r+~) h hOn a pl = dl + 2 =. D + D avec D = 1+2(1-1 )(d+2)(r+2), soit
(d~)((d+~)+l(r+~))D
2En dérivant par rapport à p on a ~pl = 2(1-1)p -~(1-1 )p±l
p D
On pose N = 2(1-1 )p2 _ 2(1-1 )p+1 et étudiOliS le signe de N. On distingue
deux cas
1) 1 > 1 : 1e discriminant ~I de N est ~I = (1_1)2 - 1(1-1) = 1-1, donc!!IL~I < O. Alors N est du signe de 1-1, soit N> O. Donc dp > ° et pl est une
fonction croissante, pl : [0,1J ~ [0,1J. On voit que si p = 0, pl = 0, que si1 11 t· 1 11P = 2' p = 2 e Sl p = , p = .
) (1-1 )+~ .2 1 < 1 On a ~I = 1-1 > O. On pose N1 = 1-1 et on VOlt que
-(1-1)+~ est positif car x_x2 est positif sur l'intervalle JO,1[. Donc N
1< O.
° aUSSl' N --~ -- + \[1:l> 1 1 t b1 da' t· d N dn pose ----1-1 . e a eau e v rla lon e on-2 1-1
ne
p °N O' + 1 + 1 + °pl
Donc pl est une fonction croissante de p s~ [0,1J pour tout 1 ~ O.
[1]
[ 2J
[3J
[4J
[ 5J
[6J
[ 7J
[8J
_. ,._._. 4._ _ _' __ ' '-
, 1
'37.
BIBLIOGRAPHIE
BAER (Reinhold), Linear Algebra and Projective Geometry, 1952, AcademiePress Inc, Publishers-New-York, N.Y.
C. CANNING, A.W.F. EDWARDS, Natural Selection and the De Finetti Diagramm.Ann. Hum. Genet., London, 31, 421-428, 1968.
R. lNEICHEN and E. BATSCHELET, Genetic Selection and De Finetti Diagramms.Journal of Mathematical Biology, 2, 33-39, 1975
A. JACQUARD, Structure génétique des populations, Masson et Cie, Paris, 1970.
P.S. MODENOV and A.S. PARKHOMENKO, Vol.2, Projective Transformations. Academie Press, New-York and London, 1965.
o. VEBLEN and J.W. YOUNG, Projective Geometry, Vol.1, Boston: Ginn, 1938.
I.M. YAGLOM, Geometrie Models of certain Genetic processes. Canadian Journal of Math., 19, 1967, 1233-1242.
J.W. YOUNG, Projective Geometry, Chicago, The open Court publishing Co,1930,185 pages.
Titre Diagrammes de DE FlNETTl
Résumé : Le travail que nous présentons ici comprend quatre parties. Dans la
première, nous rappelons des définitions et des propriétés concernant les espa
ces projectifs, le groupe projectif et le groupe des collinéations. Dans la
deuxième partie, nous introduisons la notion de diagramme de DE FlNETTl, ses
propriétés et rapports avec les espaces projectifs. De plus, on montre comment
les diagrammes de DE FlNETTl interviennent en Génétique. La troisième partie
concerne la loi de Hardy-Weinberg, une des lois fondamentales de la Génétique,
l'étude d'une sélection particulière qui n'est autre qu'une transformation pro
jective ainsi que les liens existant entre la loi de Hardy-Weinberg et les dia
grammes de DE FlNETTl. Encore dans cette troisième partie, nous faisons le lien
entre la loi de Hardy-Weinberg et les algèbres génétiques. Finalement, dans la
quatrième partie, nous exploitons certaines idées de l.M. YAGLOM.
Mots clés: Diagrammes de DE FINETTl, espaces projectifs, loi de Hardy-Weinberg,
algèbres génétiques.


















