Snímek 1 - MENDELUqqfarana/ATE-AF/ATE_AF_04.pdf · Metoda přechodové charakteristiky 20 Metoda...
13
11.10.2016 1 Automatizační technika Stabilita systémů, seřizování regulátorů Akademický rok 2016/2017 Připravil: Radim Farana Obsah • Stabilita systémů – Hurvitzowo kritérium stability – Michajlovovo kritérium stability – Nyquistovo kritérium stability • Seřizování regulátorů – Experimentální metody „pokus – omyl“ – Zieglerovy – Nicholsovy metody – Metoda násobného dominantního pólu – Metoda optimálního modulu – Metoda požadovaného modelu 2 Stabilita strana 3 Stabilita (lineárního) regulačního obvodu je definována jako jeho schopnost ustálit všechny veličiny na konečných hodnotách, pokud se vstupní veličiny ustálí na konečných hodnotách. Vstupními veličinami u regulačního obvodu jsou žádaná veličina w(t)a všechny poruchové veličiny, nejčastěji agregované do jediné poruchové veličiny v(t). Je zřejmé, že následující definice je ekvivalentní. Regulační obvod je stabilní, když omezeným vstupům odpovídají omezené výstupy. Z obou definic vyplývá, že stabilita je charakteristická vlastnost daného regulačního obvodu, která nezávisí na konkrétních vstupech ani na konkrétních výstupech.
Transcript of Snímek 1 - MENDELUqqfarana/ATE-AF/ATE_AF_04.pdf · Metoda přechodové charakteristiky 20 Metoda...

11.10.2016
1
Automatizační technika
Stabilita systémů, seřizování regulátorů
Akademický rok 2016/2017
Připravil: Radim Farana
Obsah
• Stabilita systémů
– Hurvitzowo kritérium stability
– Michajlovovo kritérium stability
– Nyquistovo kritérium stability
• Seřizování regulátorů
– Experimentální metody „pokus – omyl“
– Zieglerovy – Nicholsovy metody
– Metoda násobného dominantního pólu
– Metoda optimálního modulu
– Metoda požadovaného modelu
2
Stabilita
strana 3
Stabilita (lineárního) regulačního obvodu je definována jako jeho schopnost
ustálit všechny veličiny na konečných hodnotách, pokud se vstupní veličiny
ustálí na konečných hodnotách. Vstupními veličinami u regulačního obvodu jsou
žádaná veličina w(t) a všechny poruchové veličiny, nejčastěji agregované do
jediné poruchové veličiny v(t).
Je zřejmé, že následující definice je ekvivalentní. Regulační obvod je stabilní,
když omezeným vstupům odpovídají omezené výstupy.
Z obou definic vyplývá, že stabilita je charakteristická vlastnost daného
regulačního obvodu, která nezávisí na konkrétních vstupech ani na konkrétních
výstupech.

11.10.2016
2
Stabilita
strana 4
Vzhledem k tomu, že regulační obvod plně popisuje rovnice
)()()()()( sVsGsWsGsY vywy )()()()()( sVsGsWsGsE vewe nebo
je zřejmé, že stabilita musí být dána výrazem, který vystupuje ve všech
základních přenosech, tj. přenosu řízení Gwy(s) a přenosu poruchy Gvy(s)
nebo odchylkovém přenosu řízení Gwe(s) a odchylkovém přenosu poruchy
Gve(s). Ze vztahů pro základní přenosy vyplývá, že tímto výrazem je jejich
jmenovatel
)(
)(
)(
)()(
)(
)(1)(1)()(1
sN
sN
sN
sMsN
sN
sMsGsGsG
oo
oo
o
ooSR
kde je
Go(s) – přenos otevřeného (rozpojeného) regulačního obvodu (obecně je dán
součinem všech přenosů ve smyčce),
No(s) – charakteristický mnohočlen otevřeného regulačního obvodu
(mnohočlen ve jmenovateli přenosu otevřeného regulačního obvodu),
Mo(s) – mnohočlen v čitateli přenosu otevřeného regulačního obvodu.
Stabilita
strana 5
Mnohočlen )()()( sMsNsN oo
se nazývá charakteristický mnohočlen regulačního obvodu a po jeho
přirovnání nule se obdrží charakteristická rovnice regulačního obvodu
0)( sN
nutnou a postačující podmínkou stability řešení lineární diferenciální rovnice
je, aby kořeny s1, s2,..., sn jejího charakteristického mnohočlenu (příp. její
charakteristické rovnice) měly zápornou reálnou část, tj.
)())(()( 2101 nnn
n ssssssaasasasN
nisi ,,2,1pro,0Re
Je tedy zřejmé, že podmínka zápornosti reálných částí kořenů
charakteristického mnohočlenu regulačního obvodu nebo ekvivalentně
kořenů charakteristické rovnice regulačního obvodu je nutnou a
postačující podmínkou (asymptotické) stability daného regulačního obvodu.
Stabilita
strana 6
Dále je třeba si uvědomit, že kořeny s1, s2,..., sn jsou současně póly všech
základních přenosů (tj. přenosu řízení a poruchy a odchylkových přenosů řízení
a poruchy, a tedy jsou to póly celého regulačního obvodu. Toto neplatí pro nuly
základních přenosů. Póly regulačního obvodu jsou pro dynamické vlastnosti
regulačního obvodu zásadní.
Re 0
Im s

11.10.2016
3
Hurwitzovo kritérium stability
strana 7
Hurwitzovo kritérium stability je algebraické kritérium,
a proto není vhodné pro regulační obvody s dopravním
zpožděním (exponenciální funkce není algebraická).
Může však být použito pro přibližné ověření stability
v případě, že dopravní zpoždění se zastoupí jeho
aproximací ve tvaru racionální lomené funkce.
Aurel Stodola
* 10. 5. 1859 Liptovský Mikuláš, Slovakia
+ 25. 12. 1942 Zürich, Switzerland
http://en.wikipedia.org/wiki/Aurel_Stodola
Adolf Hurwitz
* 26. 3. 1859 Hildesheim, Germany
+ 18. 11. 1919 Zürich, Switzerland
http://en.wikipedia.org/wiki/Aurel_StodolaHurwitzovo kritérium stability může být
formulováno ve tvaru:
„Lineární regulační obvod s charakteristickým mnohočlenem
01)( asasasNn
n
bude (asymptoticky) stabilní tehdy a jen tehdy, když:
a) všechny koeficienty a0, a1,..., an existují a jsou kladné
(je to nutná podmínka stability zformulována
slovenským technikem A. Stodolou),
Hurwitzovo kritérium stability
strana 8
b) hlavní rohové minory (subdeterminanty) Hurwitzovy matice
,
000
00
0
0
0
31
42
531
a
aa
aaa
aaa
nn
nnn
nnn
H H
n
nn
nn
n Haa
aaHaH ,,
2
31
2,11
jsou kladné.“
Hurwitzovo kritérium stability
strana 9
Protože platí H1 = an–1, Hn = a0Hn–1, stačí kontrolovat kladnost pouze H2,
H3, ..., Hn–1.
Nulovost některého z Hurwitzových subdeterminantů označuje mez
stability.
Tak např. bude-li a0 = 0, pak jeden pól je nulový (počátek souřadnic
v komplexní rovině s). Tento případ charakterizuje nekmitavou mez
stability.
Když Hn–1 = 0, pak dva póly jsou ryze imaginární (póly leží na imaginární
ose souměrně podle počátku souřadnic v komplexní rovině s). V tomto
případě jde o kmitavou mez stability.

11.10.2016
4
Michajlovovo kritérium stability
strana 10
Michajlovovo kritérium stability je kmitočtové kritérium s velmi širokou
oblastí využití. Zde bude ukázána jednoduchá formulace vhodná pro regulační
obvody bez dopravního zpoždění.
Michajlovovo kritérium stability vychází z charakteristického mnohočlenu
regulačního obvodu N(s), ze kterého se po dosazení s = jω dostane
Michajlovova funkce
)(j)()()(jj
QPs
NNsNN
kde
4
42
20)(jRe)( aaaNN P je reálná část
5
53
31)(jIm)( aaaNN Q je imaginární část
Michajlovovy funkce.
Její grafické vyjádření je Michajlovova charakteristika (křivka, hodograf).
A.V. Mikhailov
* Russia
published in 1938
Michajlovovo kritérium stability
strana 11
Nyní již může být formulováno Michajlovovo kritérium ve tvaru:
„Lineární regulační obvod je (asymptoticky) stabilní tehdy a jen tehdy, když
jeho Michajlovova charakteristika N(jω) pro 0 ≤ ω ≤ ∞ začíná na kladné
reálné poloose a postupně v kladném směru (proti pohybu hodinových
ručiček) prochází n kvadranty.“
a)
Re 0
Im
a 0
n = 2
ω = 0
n = 3
n = 4
n = 1
)(jN
Stabilní regulační obvody
ω
ω
ω
ω
b)
Re 0
Im
a 0
ω n = 2
ω = 0
n = 3 n = 4
n = 1
N (j ) ω
Nestabilní regulační obvody
ω
ω
ω
Nyquistovo kritérium stability
strana 12
Nyquistovo kritérium stability je kmitočtové, a na rozdíl od
Hurwitzova a Michajlovova kritéria vychází z vlastností
otevřeného regulačního obvodu a je vhodné i pro regulační
obvody s dopravním zpožděním. Může být dokonce rozšířeno
i na některé nelineární regulační obvody.
Harry Theodor Nyquist
* 7. 2. 1889, Stora Kil, Sweden
+ 4. 4. 1976 Harligen, Texas, USA
http://en.wikipedia.org/wiki/Harry_Nyquist
G sR( )W s( )
GS( )sY s( )
V s( )
E s( )
y t( )
t
e t( )
t
Regulační obvod na kmitavé mezi stability
1)(j1)( koo GsG

11.10.2016
5
Nyquistovo kritérium stability
strana 13
Obrázek vyjadřuje tu skutečnost, že je-li lineární regulační obvod na
kmitavé mezi stability, pak amplitudofázová kmitočtová charakteristika
stabilního otevřeného regulačního obvodu prochází bodem –1 na záporné
reálné poloose. Bod –1 na záporné reálné poloose se nazývá kritický bod.
Re0
Im
ω =
q = 0
Go(jω)
ω = 0
-1
stabilní
na mezi stabilitynestabilní
kritický bod
Nyquistovo kritérium stability
strana 14
Nyní lze již zformulovat Nyquistovo kritérium stability:
„Lineární regulační obvod je (asymptoticky) stabilní tehdy a jen tehdy, když
amplitudofázová kmitočtová charakteristika stabilního otevřeného regulačního
obvodu Go(jω) pro 0 ≤ ω ≤ ∞ neobklopuje kritický bod –1 na záporné reálné
poloose.“
Integrační členy vystupující v hlavní a zpětnovazební větvi, tj. ve
smyčce, se z hlediska Nyquistova kritéria stability nepovažují za
nestabilní (jsou to v podstatě neutrální členy). Jejich počet se označuje
písmenem q a nazývá se stupeň astatismu regulačního obvodu (typ
regulačního obvodu). V tomto případě pro rozhodnutí o tom, zda
amplitudofázová kmitočtová charakteristika otevřeného regulačního obvodu
Go(jω) obklopuje či neobklopuje kritický bod –1, je třeba tuto charakteristiku
spojit s kladnou reálnou poloosou kružnicí o nekonečně velikém poloměru
(ukázáno čárkovaně),
Nyquistovo kritérium stability
strana 15
Re0
Im
ω =
Go(jω)
ω 0
-1
q = 2
q = 1
ω 0
Stabilní regulačníobvody
rr
r
Pokud amplitudofázová kmitočtová charakteristika otevřeného regulačního obvodu
Go(jω) má průběh ukázaný pro q = 2, pak jde o podmíněnou stabilitu, kdy jak
pokles, tak i vzrůst hodnoty Ao(ω) pro fázi –π může způsobit nestabilitu regulačního
obvodu.

11.10.2016
6
Seřizování regulátorů
16
Syntéza regulačního obvodu patří k nejdůležitějším činnostem při návrhu
regulačního obvodu. Skládá se z volby vhodného typu regulátoru a jeho
následného seřízení z hlediska zadaných požadavků na kvalitu regulace.
Vznik trvalých regulačních odchylek je většinou nežádoucí, a proto se volí
takový regulátor, aby stupeň astatismu regulačního obvodu q = 1. Vyšší stupeň
astatismu q zaručuje sice nulovost trvalých regulačních odchylek vyvolaných
i jinými skokovými změnami než změnami polohy, ale současně způsobuje
náchylnost regulačního obvodu k nestabilitě a podstatným způsobem
znesnadňuje jeho seřízení. Stupeň astatismu q = 0 lze použít pouze u velmi
jednoduchých regulačních obvodů s nízkými požadavky na kvalitu regulace.
V případě regulace soustav s dopravním zpožděním by byly trvalé regulační
odchylky nepřípustně veliké. Regulátor rovněž nesmí způsobit strukturální
nestabilitu. Všeobecně platí, že regulátor obsahující více složek zajistí vyšší
kvalitu regulace.
Experimentální metody „pokus – omyl“
17
Takové metody jsou v praxi často používané, protože pracují se skutečným
uzavřeným regulačním obvodem, a tedy nevyžadují v podstatě žádné znalosti
o vlastnostech regulované soustavy. Aplikují se na existující regulační obvody,
které je nutno doladit nebo seřídit po rekonstrukci nebo opravě. Příklad:
1. U regulačního obvodu se zkontroluje celé zapojení a ověří se funkčnost
všech jeho členů.
2. Nastaví se požadovaná hodnota žádané veličiny w a v ručním režimu se
nastaví y ≈ w, vyřadí se integrační složka (TI → ∞) a derivační složka (TD
→ 0), zesílení regulátoru kP se sníží a regulátor se přepne do
automatického režimu.
3. Zesílení regulátoru kP se postupně zvyšuje tak dlouho, až při skokové
změně polohy žádané veličiny w se dostane požadovaný průběh
regulované veličiny y (v případě proporcionální regulované soustavy
zůstane trvalá regulační odchylka - nevadí).
Experimentální metody „pokus – omyl“
18
4. Zesílení regulátoru kP se sníží na ¾ předchozí hodnoty a pomalu se začne
snižovat integrační časová konstanta TI a to tak dlouho až je odstraněna
případná trvalá regulační odchylka a získá se při skokové změně polohy
žádané veličiny w požadovaný průběh regulované veličiny y. Je vhodné,
aby tento průběh byl mezní nekmitavý.
5. Konečný požadovaný průběh regulované veličiny y se získá doladěním
zesílení regulátoru kP.
6. V případě použití derivační složky se derivační časová konstanta TD
nastaví na počáteční hodnotu 1/10TI. Pokud se nepříznivě projeví šumy
nebo akční veličina u bude příliš aktivní, pak použití derivační složky není
vhodné a znovu se vyřadí. Pokud dojde ke zlepšení regulačního procesu,
hodnota derivační časové konstanty TD se zvýší až na hodnotu 1/4TI,
zesílení regulátoru kP se zvýší asi o 1/4 předchozí hodnoty (tj. hodnoty
získané v bodě 5) a hodnota integrační časové konstanty TI se sníží asi o
1/3 předchozí hodnoty (tj. hodnoty získané v bodě 4).

11.10.2016
7
Zieglerovy – Nicholsovy experimentální metody
19
Zieglerovy – Nicholsovy metody patří mezi klasické metody experimentálního
seřizování konvenčních regulátorů. Jsou vhodné pro úvodní seřízení regulátorů,
protože dávají většinou veliký překmit v rozmezí od 10 % do 60 %, v průměru
pro různé regulované soustavy asi 25 %.
Seřízení Zieglerovými – Nicholsovými experimentálními metodami bývá
vhodné pro stabilizující regulaci v případě působení poruchové veličiny v na
vstupu regulované soustavy.
John G. Ziegler
* 21. 8. 1909
+ 9. 12. 1997 Scottsdale, Arizona, USA
https://en.wikipedia.org/wiki/John_G._Ziegler
Nathaniel B. Nichols
* 1914, Nottawa Township, Mich., USA
+ 17. 4. 1997
https://i.ytimg.com/vi/r_mCgJ70YLY/hqdefault.jpg
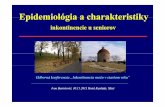
Metoda přechodové charakteristiky
20
Metoda přechodové charakteristiky (metoda otevřeného regulačního
obvodu) vychází z přechodové charakteristiky proporcionální regulované
soustavy, ze které se určí doba průtahu Tu, doba náběhu Tn a koeficient
přenosu k1.
Regulátor *Pk *
IT *DT
P u
n
Tk
T
1
– –
PI u
n
Tk
T
1
9,0 uT33,3 –
PID u
n
Tk
T
1
2,1 uT2 uT5,0
Hodnoty stavitelných parametrů
regulátorů pro Zieglerovu –
Nicholsovu metodu přechodové
charakteristiky
)(thS
t0 Tu Tn
Tp
S
)(Sh
Metoda přechodové charakteristiky
21
Typická přechodová charakteristika regulačního obvodu seřízeného
Zieglerovými – Nicholsovými experimentálními metodami

11.10.2016
8
Metoda kritických parametrů
22
Metoda kritických parametrů (metoda uzavřeného regulačního obvodu)
vychází ze skutečného regulačního obvodu, který se při vyřazené integrační
činnosti (TI → ∞) a derivační činnosti (TD → 0) zvyšováním zesílení
regulátoru kP přivede na kmitavou mez stability. Pak z periodického průběhu
libovolné veličiny regulačního obvodu se odečte kritická perioda Tk a
z odpovídajícího nastavení regulátoru – kritické zesílení kPk
Hodnoty stavitelných parametrů regulátorů
pro Zieglerovu – Nicholsovu metodu
kritických parametrů
Regulátor *Pk *
IT *DT
P Pkk5,0 – –
PI Pkk45,0 kT83,0 –
PID Pkk6,0 kT5,0 kT125,0
Metoda kritických parametrů
23
Metoda kritických parametrů je použitelná i pro regulátory typu I. V tomto
případě se regulační obvod přivede na kmitavou mez stability vhodným
snížením integrační časové konstanty TI. Při vystoupení kmitavé meze
stability se z nastavení regulátoru odečte kritická hodnota integrační
časové konstanty TIk a pak pro seřízení se použije hodnota
IkI TT 2*
Pokud je požadován nekmitavý regulační pochod, pak se volí
IkI TT )54(*
Metoda čtvrtinového tlumení
24
Metoda čtvrtinového tlumení je modifikací Zieglerovy – Nicholsovy
metody kritických parametrů. Na rozdíl od této metody nepředpokládá
rozkmitání regulačního obvodu, co umožňuje pracovat v lineární oblasti a
použití u většího množství regulovaných soustav
Seřízení regulačního obvodu metodou
čtvrtinového tlumení
Hodnoty stavitelných parametrů
regulátorů pro metodu čtvrtinového
tlumení
Regulátor *Pk *
IT *DT
P 4/1Pk – –
PI 4/19,0 Pk 4/1T –
PID 4/12,1 Pk 4/16,0 T 4/115,0 T

11.10.2016
9
Metoda násobného dominantního pólu
25
Metoda násobného dominantního pólu je jednoduchá analytická metoda
umožňující seřídit regulátory s integrační složkou (I, PI, PID) pro
proporcionální regulované soustavy s přenosem
ii
S
sT
ksG
)1()(
1
a regulátory bez integrační složky (P, PD) pro integrační regulované soustavy
s přenosem
ii
S
sTs
ksG
)1()(
1
na nekmitavý regulační pochod.
Zvolený regulátor se seřídí tak, aby byl zajištěn jeden dominantní reálný pól
(samozřejmě stabilní) s maximální možnou násobností. O zbývajících pólech
a příp. nulách se předpokládá, že jsou nedominantní a že jejich vliv na
výslednou dynamiku regulačního obvodu lze zanedbat.
Metoda násobného dominantního pólu
26
Regulovaná
soustava
Regulátor
Typ *Pk
*IT
*DT Poznámka
ii sT
k
1
1
I – i
ii
iiTk
111 – 1i
PI 1
1 1
11
i
i
i
k
i
iTi
4
12
– 2i
PI
D
2
1 1
2
1
45
i
i
i
ik
i
127
14522
ii
iiTi
452
1
i
iiTi 3i
ii sTs
k
1
1
P
i
i i
i
iTk
11
1
1
– – 1i
PD
1
21 1
1
1
4
i
i i
i
iTk
i –
i
iTi
4
12
2i
Hodnoty stavitelných parametrů regulátorů pro
metodu násobného dominantního pólu
Metoda optimálního modulu
27
Mezi analytické metody seřizování regulátorů patří metoda (kritérium)
optimálního modulu. Vychází z požadavku na přenos řízení, resp. modul
kmitočtového přenosu řízení
1)(1)j(1)( wywywy AGsG
Předpokládá se, že požadovaný průběh Awy(ω)
by měl být monotónně klesající funkcí
0
wyA
10 wyA Je zřejmé, že platí
1)(1)(2
wywy AA
Je to důležité, protože s druhou
mocninou se lépe pracuje a navíc platí
222j)j)(j(

11.10.2016
10
Metoda optimálního modulu
28
Má-li přenos regulované soustavy GS(s) některý ze tvarů uvedených
v tabulce, pak použitím doporučených regulátorů a odpovídajících hodnot
stavitelných parametrů (T = 0) se obdrží tzv. standardní tvar přenosu řízení
iww
www
wy TTsTsT
sG 2,2
1,
12
1)(
22
V tomto případě není třeba kontrolovat stabilitu regulačního obvodu,
protože tento tvar je rovněž standardní tvar kritéria ITAE
obecně při použití metody optimálního modulu je třeba kontrolovat stabilitu a
nejlépe simulačně ověřit kvalitu regulace.
Metoda optimálního modulu
29
REGULOVANÁ
SOUSTAVA
REGULÁTOR < ANALOGOVÝ
ČÍSLICOVÝ
T = 0
T > 0
TYP *Pk
*IT
*DT
1 11
1
sT
k I – TTk 5,02 11 –
2 11
1
sTs
k P
112
1
Tk – –
3 11 21
1
sTsT
k
21 TT
PI 21
*
2 Tk
TI TT 5,01 –
4 11 21
1
sTsTs
k
21 TT
PD TTk 5,02
1
21 – TT 5,01
5 111 321
1
sTsTsT
k
321 TTT
PID TTk
TI
5,02 31
*
TTT 21
421
21 T
TT
TT
Hodnoty stavitelných parametrů regulátorů pro
metodu optimálního modulu
Metoda optimálního modulu
30
Při seřizování regulátorů podle předchozí tabulky byla použita tzv. kompenzace
časových konstant, která spočívá ve vzájemném vykrácení jednoho nebo dvou
stabilních dvojčlenů regulované soustavy jedním dvojčlenem u regulátorů PI
a PD nebo dvěma dvojčleny u regulátoru PID. Dojde tím ke zjednodušení
dynamiky regulačního obvodu, ale současně může dojít k pomalejším odezvám,
protože stabilní nuly čitatele přenosu řízení Gwy(s) mohou regulační pochod
urychlit.
Metoda optimálního modulu může být použita jak pro analogové regulátory
(T = 0), tak i pro číslicové regulátory (T > 0),

11.10.2016
11
Metoda požadovaného modelu
31
Metoda požadovaného modelu (dříve též nazývaná metoda inverze
dynamiky) je analyticko – experimentální metoda seřizování konvenčních
regulátorů, která vychází z požadovaného modelu uzavřeného regulačního
obvodu, tj. z požadovaného přenosu řízení ve tvaru
sT
sTwyd
das
a
sW
sYsG
ee)(
)()(
Kde je a – zesílení otevřeného regulačního obvodu
Je to metoda velmi jednoduchá, která využívá kompenzaci časových konstant,
zajišťuje stupeň astatismu regulačního obvodu q = 1 (tj. nulové trvalé regulační
odchylky způsobené skokovými změnami polohy žádané veličiny w a
poruchové veličiny v působící na výstupu regulované soustavy) a odpovídající
volbou zesílení otevřeného regulačního obvodu a umožňuje dosáhnout
požadovaného relativního překmitu κ v rozmezí 0 do 0,5 (50 %).
Metoda požadovaného modelu
32
Závislost relativního překmitu κ na zesílení otevřeného regulačního obvodu a
Metoda požadovaného modelu
33
Zesílení otevřeného regulačního obvodu a lze získat analyticky pro
nekmitavý regulační pochoddT
ae
1 a pro kmitavou mez stability
dTa
2
pro jiné hodnoty relativního překmitu κ byla simulačně určena jeho závislost
na dopravním zpoždění Td
dTa
1
0 0,05 0,10 0,15 0,20 0,25 0,30 0,35 0,40 0,45 0,50
1,282 0,984 0,884 0,832 0,763 0,697 0,669 0,640 0,618 0,599 0,577
2,718 1,944 1,720 1,561 1,437 1,337 1,248 1,172 1,104 1,045 0,992
Závislost koeficientů a na relativním překmitu κ

11.10.2016
12
Metoda požadovaného modelu
34
REGULOVANÁ
SOUSTAVA
REGULÁTOR < ANALOGOVÝ T = 0
ČÍSLICOVÝ T > 0
TYP Pk
IT
DT
1 sTd
s
k e
1 P
1)(
1
kTT d – –
2 sTd
sT
k
e
11
1 PI
1)( kTT
T
d
I
21
TT –
3
sTd
sTs
k
e
11
1 PD
1)(
1
kTT d –
21
TT
4 sTd
sTsT
k
e
11 21
1
21 TT
PID 1)( kTT
T
d
I
TTT 21 421
21 T
TT
TT
5
sTd
sTsT
k
e
12 0022
0
1
0,5 < 10
PID 1)( kTT
T
d
I
TT 002 42 0
0 TT
Hodnoty stavitelných parametrů regulátoru pro
metodu požadovaného modelu
Metoda požadovaného modelu
35
Přenos doporučeného regulátoru GR(s) pro některou z regulovaných soustav
s přenosem GS(s) se pro požadovaný přenos řízení získá ze vztahu
)(1
)(
)(
1)(
)()(1
)()()(
sG
sG
sGsG
sGsG
sGsGsG
wy
wy
S
R
SR
SRwy
Např. pro regulovanou soustavu s přenosem sTS
d
sT
ksG
e
1)(
1
1
(viz řádek 2 v tabulce pro T = 0)
sT
ksk
sTa
as
aas
a
k
sTsG
I
P
sT
sT
sT
sT
sTR
d
d
d
d
d *
*
1
1
1
1 11
)1(
ee
1
ee
e
1)(
1*
1
**
, TTk
aTk I
IP příp. po uvažování
dTa
1
1*
1
**
, TTTk
Tk I
d
IP
Dvou- a třípolohová regulace
36
Dvou- a třípolohová (reléová) regulace patří mezi nejjednodušší druhy
nespojitého zpětnovazebního řízení (jde o nespojitost v úrovni). Nejčastěji jde
např. o regulaci teploty vzduchu v místnosti, chladničce, mrazničce, elektrické
troubě, dále o regulaci teploty a výšky hladiny vody v automatické pračce,
atd. Hlavním důvodem používání dvou- a třípolohové regulace je velmi nízká
cena a poměrně vysoká spolehlivost jak vlastního regulátoru, tak i akčního
členu.
B B
B
B
B B
0 e
u
0h
0 e
u
0h
0 e
u
h
0 e
u
h
a) b)
Charakteristiky dvoupolohového regulátoru:
a) nesymetrického
• bez hystereze (h = 0)
• s hysterezí (h > 0),
b) symetrického
• bez hystereze (h = 0)
• s hysterezí (h > 0)

11.10.2016
13
Dvou- a třípolohová regulace
37
2
a
2
a
B
2
a
2
a
B
BB
0 e
u
0h
0 e
u
h
h
Charakteristiky symetrického třípolohového
regulátoru
• bez hystereze (h = 0)
• s hysterezí (h > 0)
kde je
B – amplituda,
h – šířka hystereze,
a – necitlivost.
Dvou- a třípolohová regulace
38
Pokud charakteristika regulátoru je bez hystereze (tj. bez paměti), jde o jeho
statickou charakteristiku. V případě charakteristiky s hysterezí (tj. s pamětí),
přesně vzato nejde o statickou charakteristiku (proto se také hovoří pouze o
charakteristikách).
e
uw
2v
ye
1v
sTd
sT
k
e
11
1
Blokové schéma obvodu nesymetrické dvoupolohové
regulace s hysterezí
Dvou- a třípolohová regulace
39
t
B
) ( t u
0
t
y Δ
y T
d T
d T d T
0
min y
d y
w
h y
1 T
1 T 1 T
B k y 1 max
) ( t y
0
h
B
e
u
ZAPNUTO
VYPNUTO
Průběh regulované y(t) a akční veličiny u(t)
v obvodu dvoupolohové regulace