
Sistemi e Tecnologie per l'Automazione · Ing. Marcello Montanari - Sistemi e Tecnologie per...
121
Sistemi e Tecnologie per l'Automazione Dimensionamento di un azionamento per il controllo del moto Revisionato il 20/02/2008 Revisionato il 20/02/2008 Prof. A. Tonielli, Ing. A. Tilli, Ing. M. Montanari DEIS - Università di Bologna Tel. 051-2093924 E-mail: [email protected] http://www-lar.deis.unibo.it/atilli Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni
-
Upload
truongthuan -
Category
Documents
-
view
232 -
download
1
Transcript of Sistemi e Tecnologie per l'Automazione · Ing. Marcello Montanari - Sistemi e Tecnologie per...

Sistemi e Tecnologie per l'Automazione
Dimensionamento di un azionamento per il controllo del moto
Revisionato il 20/02/2008Revisionato il 20/02/2008Revisionato il 20/02/2008
Prof. A. Tonielli, Ing. A. Tilli, Ing. M. MontanariDEIS - Università di Bologna
Tel. 051-2093924E-mail: [email protected]
http://www-lar.deis.unibo.it/atilli
Laurea Specialistica in Ingegneria InformaticaLaurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 2
Scoposostituzione di sistemi di trasmissione meccanica
generazione tramite motore elettrico di moti ciclici in sostituzione di cinematismi articolati mossi da camme meccaniche
camma meccanicadispositivo (di solito rotante) con profilatura eccentricaper la trasformazione di un moto rotativo uniforme
a velocità angolare (costante) ωin uno rettilineo periodico
a velocità lineare v variabilecon precise relazioni di fase tra i due moti
la parte che trasla (cedente) deve muoversi in modo sincrono con quella rotante (movente)
con controllo delle accelerazionii profili della camma sono calibrati per garantire specifiche accelerazioni al cedente
Azionamenti per automazione
ω
v

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 3
Generazione di movimenti cicliciEsempio di camma meccanica
comando delle valvole di motore a scoppio
arrestodiscesa
p
v
ω
ω
salitaalbero a camme di un motore a
scoppio

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 4
metodo di controllo di un azionamento per la generazionedi moti periodici con precise relazioni di fase rispetto al
movimento di un altro motore (Master) e con controllo delle accelerazioni
Generazione di movimenti cicliciCamma elettrica
Azionamentoelettrico
discesasalita arresto
p
v
ωmastersincronismo
ωslave
θmaster

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 5
Diagramma delle girate di una cammamostra le posizioni del cedente in funzione di quelle del movente
la camma non va descritta completamente in determinati punti del ciclo il progettista vincola:
posizione e/o velocità e/o accelerazione del cedentesi usano algoritmi numerici per interpolare i punti intermedi
in una camma elettronica il movente è chiamato Asse Master, il cedente Asse Slave
Camme Elettriche
0
vincoli di posizione
0 180 360°
mm
cede
nte
movente
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 6
Camme ElettricheAlcuni movimenti tipici in una macchina automatica
Oscillatoreil ciclo del cedente è scomposto in 4 parti
avanti, arresto, indietro, arrestoil cedente si muove di moto alternativo
Intermittoreil ciclo del cedente e scomposto in 2 parti
avanti e arrestoil cedente si muove sempre in una direzione
Albero elettricoil cedente si muove di moto uniforme con un rapporto di velocitàanche diverso da 1 rispetto al movente
garantendo il sincronismo delle posizioni dei due motories.: rapporto di velocità 3:1
lo slave va tre volte più piano del master, ma ogni 3 giri entrambi passano per la posizione zero contemporaneamente e per sempre

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 7
gira
ta c
eden
te ϑ
movente ϕ
Camme ElettricheOscillatore
il ciclo del cedente è scomposto in 4 partiavanti, arresto, indietro, arresto
discesa ripososalita arresto
periodo (0 ≤ ϕ ≤ 2π)

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 8
Camme ElettricheIntermittore
il ciclo del cedente e scomposto in 2 partiavanti e arresto
il cedente si muove sempre in una direzionetipico di giostre rotanti, la fase di arresto serve per lavorare i pezzi, quella di avanzamento per portare sotto la testata di lavorazione un nuovo pezzo
arrestosalita
gira
ta c
eden
te ϑ
movente ϕperiodo (0 ≤ ϕ ≤ 2π)

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 9
Camme ElettricheAlbero elettrico
il cedente si muove a velocità costante rispetto a quella del movente
con un rapporto di velocità anche diverso da 1garantendo il sincronismo delle posizioni dei due motori
es.: rapporto di velocità 3:1lo slave va tre volte più piano del master, ma ogni 3 giri entrambi passano per la posizione zero contemporaneamente e per sempre
gira
ta c
eden
te ϑ
Movente ϕperiodo (0 ≤ ϕ ≤ 2π)

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 10
Camme elettricheCamme diverse nello stesso insieme di vincoli
0 0.1 0.2 0.3 0.4 s
250300350400450500
0 0.1 0.2 0.3 0.4 s-3000-2000-1000
0100020003000
120 cicli/min
0 0.1 0.2 0.3 0.4 s-3000-2000-1000
0100020003000
0 0.1 0.2 0.3 0.4 s
250300350400450500
-
0 0.1 0.2 0.3 0.4 s
-3-2-10123
x 104
0 0.1 0.2 0.3 0.4 s
-5
0
5
x 104
Trapezoidale troncata
Polinomiale 6° ordine
posizione velocità accelerazione
Max = 3.5
Max = 8
Max = 3000
Max = 3500

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 11
100
101
102
103
Velocità
100 101 102 103100
101
102
103
104
100 101 102 103
120 cicli/minTrapezoidale troncata Polinomiale 6° ordine
100
101
102
103
104
100 101 102 103 100 101 102 103100
101
102
103
Accelerazione
Velocità
Accelerazione
Più difficile da inseguire
Camme elettricheCaratteristiche spettrali delle due camme

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 12
CaratteristicaAzionamentoTrapezoidale
Polinomiale 3
Camme elettricheAltre differenze tra le camme (leggi di moto)
relazione velocità coppia

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 13
Traiettorie di moto - tipologieFamiglie principali di leggi di moto (traiettoria)
Polinomialidi grado 3, 5, 7, ...
Trigonometrichecicloidali, armoniche
Sviluppo in serie di FourierGutman, Freudenstein
SplineSpline ordine 3, ordine 5, B-Spline
Compostetrapezoidali, a “doppia S”, ….

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 14
Splines
Spline cubica ottenuta con7 punti
q = 0, 10, 50 30, 100, 20
per gli istantit = 0, 2, 4, 6, 8, 10, 12
Vin = Vfin = 0
Continuità della velocità
Continuità dell’accelerazione
Traiettorie di moto - tipologie

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 15
Traiettorie “composte”Ottenute per rispondere alle più molteplici esigenze e specificheScomponibili in “tratti”, ognuno dei quali definito con una funzione elementare (polinomiale, trigonometrica)
traiettoria trapezoidaletraiettoria “a doppia S”traiettorie complesse per più punti
Composizione di:cicloidale (0-1) polinomiale cubica (1-2)cicloidale (2-3)accelerazione costante (3-4)
Traiettorie di moto - tipologie

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 16
Traiettorie comuniTraiettorie “trapezoidali”
rispetto dei vincoli di Vmax e Amax, ottimizzazione del tempoTraiettorie “trapezoidali modificate”
rispetto di Vmax, Amax, accelerazione continuaTraiettorie cicloidali/armoniche
leggi di moti piu` “morbide”
Traiettorie di moto - tipologie
ArmonicaCicloidaleTrapezoidale Trap. modificata
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 17
Traiettorie di moto - confrontoParametri di confronto
A parità di condizioni (passaggio per punti, velocità/accelerazioni iniziali e finali, …) la scelta di diverse leggi di moto comporta alcune differenze di rilievo per il sistema meccanico e di attuazione
Valori massimi di Velocità (V_max), accelerazione (A_max), jerk, …
Diversi valori di coppia efficaceC_e
Differenti modalità di funzionamento dell’attuatore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 18
Traiettorie di moto - confrontoDifferenze cinematiche
traiettorieTrapezoidalePolinomiali 3, 5, 7
posizione
velocità
accelerazione
7
5
3
3
5
7

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 19
Traiettoria V_max Var. % A_max Var. % C_e (J=1) Var. %Trapezoidale 2 0,00 4 0,00 4 0,00Armonica 1,5708 -21,46 4,9348 23,37 3,4544 -13,64Cicloidale 2 0 6,2832 57,08 4,4428 11,07Polinomiale 3 1,5 -25 6 50 3,4131 -14,67Polinomiale 5 1,875 -6,25 5,7733 44,33 4,1402 3,5Polinomiale 7 2,1875 9,37 7,5107 87,77 5,0452 26,13Trap. Modificata 2 0 4,8881 22,2 4,3163 7,91Sinus. Modificata 1,7593 -12,03 5,5279 38,2 3,9667 -0,83Gutman 1-3 2 0 5,1296 28,24 4,2475 6,19Freudestein 1-3 2 0 5,3856 34,64 4,3104 7,76Freudestein 1-3-5 2 0 5,0603 26,51 4,2516 6,29
Valori ottenuti con normalizzazione a: q0=0; q1=1; t0=0; t1=1.
Traiettorie di moto - confrontoDifferenze tra profili diversi

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 20
TrapezoidaleTrapezoidale modificataPolinomiale 3Polinomiale 5
Traiettorie di moto - inseguibilitàAltre differenze
possono derivare dalle caratteristiche meccaniche del carico (elasticità):
discontinuità di accelerazione (= disc. Forze inerziali) possono provocare l’insorgenza di vibrazioni e/o difficoltà di inseguimento (controllo)
Errori di inseguimento

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 21
Traiettorie per Azionamenti ElettriciClaudio Melchiorri Esculapio ed., Bologna, 2000
Pianificazione del moto:
- traiettorie più (e meno) comuni
- analisi delle principali carattestiche
- analisi frequenziali (vibrazioni)
- legami con il dimensionamento motori
- legami con il problema del controllo
Traiettorie di moto - bibliografia

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 22
Introduzione al dimensionamentoSchema di riferimento
elementi coinvolticinematismo da movimentare (carico)
dato di partenza del problemariduttore
scelta e dimensionamentoazionamento
sceltadella tipologia (brushless, vettoriale ad induzione, passo-passo,..)
dimensionamentodel motore e del convertitore elettronico di potenza (inverter)
sensori motore
azionamento
convertitorecontrollo
riduttore
ω ω1
cinematismo da movimentare
vite a ricircolazione di sfere
può essere qualunquealtro cinematismo

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 23
Schema di riferimento
variabili sul carico
posizione (p), velocità (v) e accelerazione (a) traslantiforza resistente (fr)
all'uscita del riduttore e quindi in ingresso al cinematismo di trasformazione rotazione/traslazione
rotazione (ϑ1), velocità (ω1) e accelerazione (ω1) angolaricoppia (cr1) equivalente alla forza resistente esterna (fr)
all'uscita del motore e quindi all'ingresso del riduttorerotazione (ϑ), velocità (ω) e accelerazione (ω) angolaricoppia (cr) equivalente alla coppia (cr1)
Introduzione al dimensionamento
p, v, ap, v, aϑϑ, , ωω, , ωω..
frϑϑ11, , ωω11, , ωω11
.
cr1cr

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 24
p, v, ap, v, aϑϑ, , ωω, , ωω..
frϑϑ11, , ωω11, , ωω11
.
cr1cr
Schema di riferimento
parametri inerziali
Massa del carico traslante (M)momento di inerzia del riduttore (Jr)momento di inerzia del motore (Jm)
di trasformazionerapporto di riduzione del riduttore (kr)
kr (10:1) significa che la velocità all'ingresso è 10 volte di quella di uscitaè l'inverso del guadagno di velocità
Introduzione al dimensionamento
1rk ω
ω=
MMJJmm
JJrr
kkrr
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 25
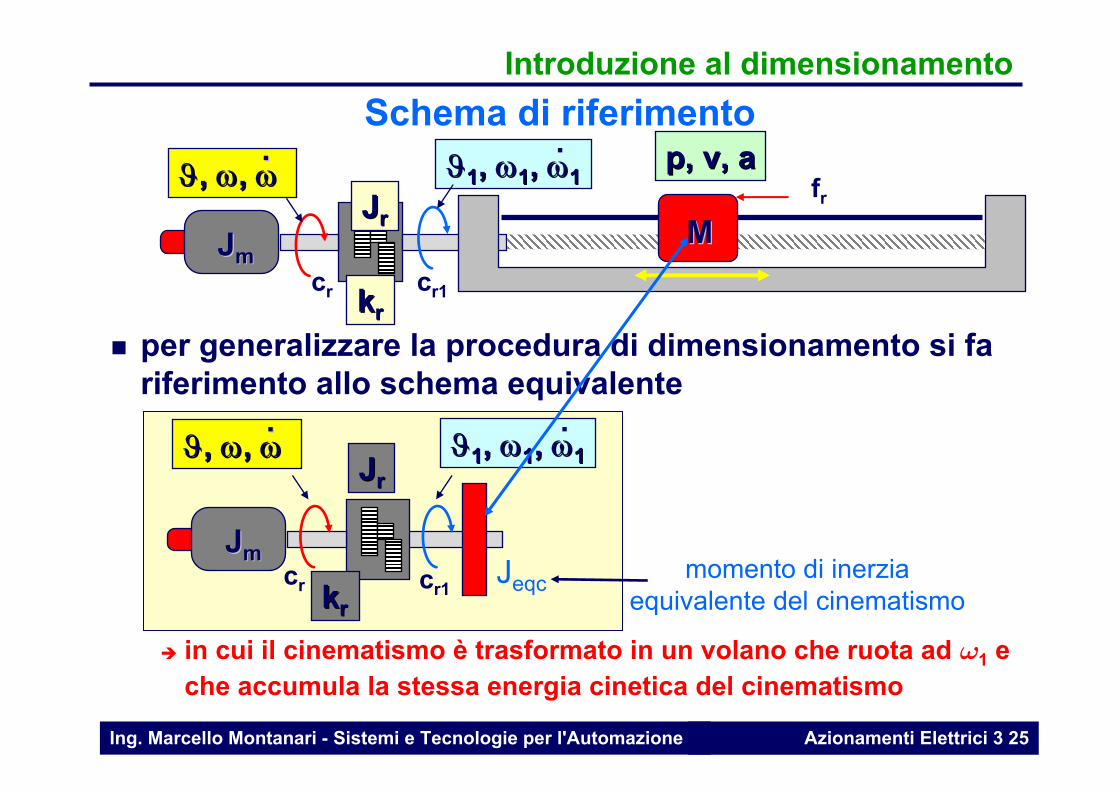
Schema di riferimento
per generalizzare la procedura di dimensionamento si fa riferimento allo schema equivalente
in cui il cinematismo è trasformato in un volano che ruota ad ω1 e che accumula la stessa energia cinetica del cinematismo
JJmm
JJrr
kkrr
ϑϑ, , ωω, , ωω..
ϑϑ11, , ωω11, , ωω11.
cr1cr
Introduzione al dimensionamento
Jeqc momento di inerziaequivalente del cinematismo
p, v, ap, v, aϑϑ, , ωω, , ωω..
frϑϑ11, , ωω11, , ωω11
.
cr1cr
MMJJmm
JJrr
kkrr

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 26
Jeqc = Jvite + Jeqcarico dato di costruzione
Introduzione al dimensionamentoCalcolo del momento di inerzia equivalente del
cinematismo
M
vω1 Jeqcarico
Equivalenza delle energie cinetiche immagazzinate
2 21
1 12 2 eqcaricoMv J ω=21
2e Mv=
kkaa = (= (ωω11/v) /v) rapporto rapporto
di accoppiamentodi accoppiamentodel cinematismodel cinematismo
2
2 21
eqcaricoa
v MJ Mkω
⎛ ⎞= =⎜ ⎟
⎝ ⎠
Jeqc
21
12 eqcaricoe J ω=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 27
Introduzione al dimensionamentoCalcolo della coppia equivalente ad una forza di
carico sul cinematismo
Gli stessi calcoli energetici si possono utilizzare nel Gli stessi calcoli energetici si possono utilizzare nel caso di carico rotante (sostituendo caso di carico rotante (sostituendo ωω22 a v) o di a v) o di
interconnessione di un riduttore tra il motore e la viteinterconnessione di un riduttore tra il motore e la vite
equilibrio potenze
fvP = 1ωcP =
fM
vωω11 Jeqcarico
c
akfvfc =⎟
⎠
⎞⎜⎝
⎛=
1ω
kkaa = rapporto di = rapporto di accoppiamentoaccoppiamentodel cinematismodel cinematismo
1ωcfv =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 28
un modello descrittivoc1
c2
ω1
ω2
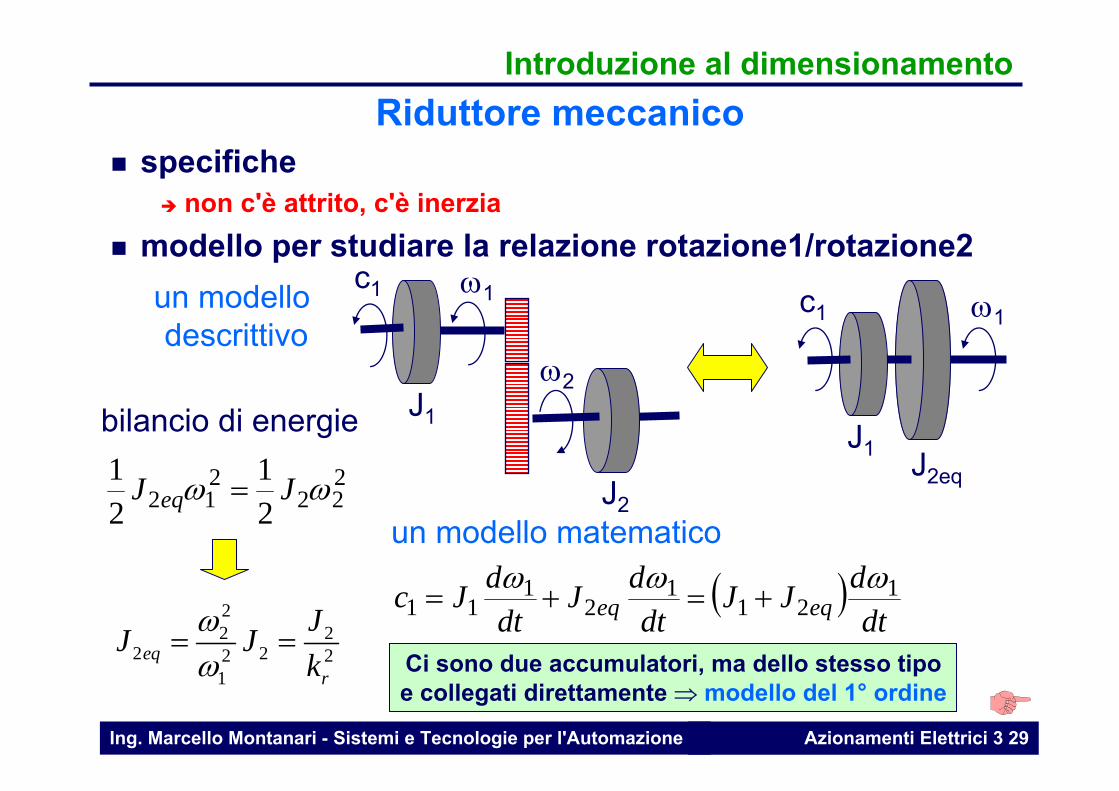
Introduzione al dimensionamentoRiduttore meccanico
specifichenon c'è attrito
modello per studiare la relazione rotazione1/rotazione2
un modello matematico
bilancio di potenze
2211 ωω cc =2
1ωω
=rkrapporto diriduzione
rkccc 2
21
21 ==
ωω
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 29
Introduzione al dimensionamentoRiduttore meccanico
specifichenon c'è attrito, c'è inerzia
modello per studiare la relazione rotazione1/rotazione2
bilancio di energie
222
212 2
121 ωω JJ eq =
un modello matematico
( )dt
dJJdt
dJdt
dJc eqeq1
211
21
11ωωω
+=+=22 2
2 22 21
= =eqr
JJ Jk
ωω
un modello descrittivo
J2
ω1
ω2J1
c1
J2eq
ω1
J1
c1
Ci sono due accumulatori, ma dello stesso tipoe collegati direttamente ⇒ modello del 1° ordine

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 30
Scelta dell'azionamento e dimensionamento di componentiAlbero decisionale - in tre fasi
Fase 1- scelta della tipologia di motorebrushless sinusoidale o trapezoidale, asincrono con controllo vettoriale, passo passo,...si effettua a partire da
specifiche di massima sul movimentoclasse di potenza/coppiavincoli di costo
Fase 2 - Scelta dei costruttorisi effettua a partire da
vincoli di costoragioni commercialirichieste del cliente
porta a cataloghi con i dati di targa dei motori, dei convertitori elettronici di potenza e dei riduttori disponibili

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 31
Scelta dell'azionamento e dimensionamento di componentiAlbero decisionale - in tre fasi
Fase 3 - Scelta del motore, del riduttore e del convertitoresi effettua a partire da
specifiche di dettaglio sul movimentoporta a
dimensionamento del motorecoppia erogata, taglia di potenza, numero di giri, dimensioni
dimensionamento del riduttorerapporto di riduzione, coppia resa all'albero di uscita
del convertitorecorrente continuativa, corrente di picco
dimensionare un componente significa in questo contestoscegliere un componente da un catalogo
verrà spiegato come effettuare questa scelta con un approccio metodologico e consapevole

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 32
Scelta dell’AzionamentoLa scelta dell’azionamento va fatta prima possibile
vanno valutati in anticipolo spazio per allocare il motore ed il riduttorela necessità di raffreddarloil miglior compromesso tra meccanica e azionamento
massemomenti di inerziaattritisistemi di trasmissione

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 33
DefinizioniUtilizzo di motori in condizioni operative standard
definizionitensione nominale
valore tipico della tensione di alimentazionevelocità nominale
valore della velocità con tensione di alimentazione nominale (f.e.m uguale alla tensione nominale)
corrente nominalevalore della corrente quando eroga la coppia nominale
potenza e coppia nominalivalori che, in condizioni operative standard, il motore è in grado di erogare indefinitamente senza che la temperatura degli avvolgimenti superi i valori limite di progetto
tipiche condizioni operative standardvelocità nominale e carico nominalea temperatura dell'ambiente di lavoro < 40°ad altitudine < 1000m
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 34
DefinizioniGrandezze utili per il dimensionamento
si trovano nel data-sheet del motoredefinizioni
tensione nominale (V)valore tipico della tensione di alimentazione
velocità nominale (rad/s o rpm (rotation per minute))valore della velocità con tensione di alimentazione nominale
(f.e.m. uguale alla tensione nominale)corrente nominale (A)
valore della corrente quando eroga la coppia nominale coppia/potenza nominali (Nm; W)
valori di coppia/potenza che il motore è in grado di erogare indefinitamente senza che la temperatura degli avvolgimenti superi i valori limite di progetto
costante di coppia (Nm/A)coefficiente che trasforma la corrente in coppia

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 35
DefinizioniGrandezze utili per il dimensionamento
definizionivelocità massima (rad/s; rpm)
massima velocità compatibile con il dimensionamento meccanico del motore
può essere ottenuta alimentando il motore con una tensione superiore a quella nominale (isolamento degli avvolgimenti?)può essere ottenuta con opportune tecniche di deflussaggio del motore
coppia massima (Nm)massima coppia compatibile con il dimensionamento meccanico del motore
può essere erogata per brevi intervalli di tempo sovralimentandoin corrente il motore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 36
DefinizioniUtilizzo di azionamenti in condizioni operative non
standardaltezza (H) e temperatura ambiente (T) condizionano il raffreddamento del motore. Occorre tenerne conto con coefficienti correttivi (KH e KT ≤1) della potenza e della coppiatipicamente
i valori nominali sono definiti per T < 40°C e H< 1000m
1
.9
.8
.7
.61km 2km 3km
40°C45°C50°C55°C60°C
⎪⎩
⎪⎨⎧
>⎟⎠⎞
⎜⎝⎛ −
−
<≅ kmHH
kmHKH 1
1000010001
11
⎪⎩
⎪⎨⎧
°>⎟⎠⎞
⎜⎝⎛ −
−
°<≅ CTT
CTKT 40
100401
401

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 37
Introduzione al dimensionamento dell'azionamentoAlcune considerazioni sul dimensionamento
i motori ed i convertitori vanno dimensionati in funzione della loro dissipazione di potenza per effetto Joule (Ri2)
se generano più potenza (termica) di quella di targa scaldano e si romponola dissipazione dipende dalla corrente e quindi dalla coppia
il riduttore gioca un ruolo importante perchè trasforma velocità e coppie al carico in altre e diverse al motore, in relazione al suo rapporto di riduzione
se non si fissa il rapporto di riduzione non si possono conoscere coppie e velocità al motore
non si può dimensionare il motore senza aver scelto il riduttoreesiste un rapporto di riduzione ottimale?
sì, e dipende dalle inerzie del carico e del motorenon è opportuno scegliere il riduttore prima del motore
il dimensionamento sembra un processo in deadlockmostreremo una procedura iterativa a convergenza garantita

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 38
Introduzione al dimensionamento dell'azionamentoAlbero decisionale - Fase 3
tipi di movimentomovimenti uniformi
Il funzionamento a regime domina sui transitoriIl carico è prevalentemente dissipativoDimensionamento semplice
bisogna calcolare la potenza dissipata sul carico (a regime) e scegliere un motore di potenza nominale superiore
movimenti cicliciInseguimento di velocitàRegolazione/inseguimento di posizioneCamme/assi elettrici
I transitori dominano il movimentoIl carico è prevalentemente inerziale
Dimensionamento complicatodimensionamento in transitorio (in coppia) occorre utilizzare un modello termico del motore
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 39
Introduzione al dimensionamento dell'azionamentoIl dimensionamento di sistemi in moto ciclico è
abbastanza complicatogli elementi che condizionano questo processo sono
scelta dei profili di camma (detti anche profili di moto)è preliminare al dimensionamento, ma lo condiziona diversi criteri
scelta per favorire l'inseguimento da parte dell'azionamentoscelta per minimizzare la coppia e/o la velocità massima al motorescelta per minimizzare le vibrazioni imposte alla struttura
le caratteristiche del movimento ciclico da generareaccelerazioni/decelerazioni, tratti in sosta e a velocità costante
analisi termica del movimento ciclicodimensionamento termico del motore
la scelta del rapporto di riduzione calcolo del rapporto di riduzione ottimale
attenzione alla velocità massima del motore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 40
Introduzione al dimensionamento dell'azionamentoStudiamo il caso più complesso di moto ciclicotipico delle camme elettriche
i transitori determinano il dimensionamentoil carico inerziale è dominante su quello dissipativo
i profili di moto sono sempre definiti in modo geometrico
posizione dell'asse Slave e sue derivate 1a e 2a in funzione di quella dell'asse Masterdefinire un profilo di moto in termini geometrici è più flessibile
i profili temporali (velocità e accelerazioni) alle diverse velocità operative possono essere ottenuti da quelli geometrici con semplici operazioni di moltiplicazione
0 2πciclo macchina
ϑ
ϑm
ϑm
ϑm
m
ϑϑ
∂∂
2
2m
ϑϑ
∂∂
T

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 41
Introduzione al dimensionamento dell'azionamentoDai profili geometrici ai profili temporali di moto i profili geometrici sono indipendenti dalla velocità a cui opera effettivamente la macchinail dimensionamento va fatto alla massima velocità di funzionamento della macchina ωm
di solito fornita in termini di numero di cicli macchina NC al minutot: tempo; θm: posizione asse master
ne consegue
i profili temporali si ottengono direttamente dai profili geometrici corrispondenti previa moltiplicazione per ωmed ωm
2 rispettivamente
2 *60
Cm
Nπω = in rad/s m
m
t ϑω
=
m mm
m
dt td ϑ ωϑ
ϑϑϑϑ
∂∂=
∂∂ ∂
=∂
2
2
2
22m
m
ddt ϑ
ω ϑϑ ∂=
∂
m mtϑ ω= ⇒
e

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 42
Introduzione al dimensionamento dell'azionamentoProfili geometrici e profili temporali
stessi andamenti temporali, ma diverso fattore di scalacambiano le unità di misura degli assi
0 2πciclo macchina
ϑ
ϑm
ϑm
ϑm
m
ϑϑ
∂∂
2
2m
ϑϑ
∂∂
T T
ϑ
ωt
t
t
ω.

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 43
Introduzione al dimensionamento dell'azionamentoSchema di riferimento senza coppie esterne
alcune formule utili nel seguitoin un sistema rotante caratterizzato da un volano senza attrito
ai capi di un riduttore
per due inerzie rotanti alla stessa velocità angolare
Jeqc
JJmm
JJrr
kkrr
ϑϑ, , ωω, , ωω..
ϑϑ11, , ωω11, , ωω11.
outin
r
cck
= 2out in rJ J k=
c Jω=
1 2totJ J J= +
out in rc c k= 2out
inr
JJk
=
coppia di accelerazione
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 44
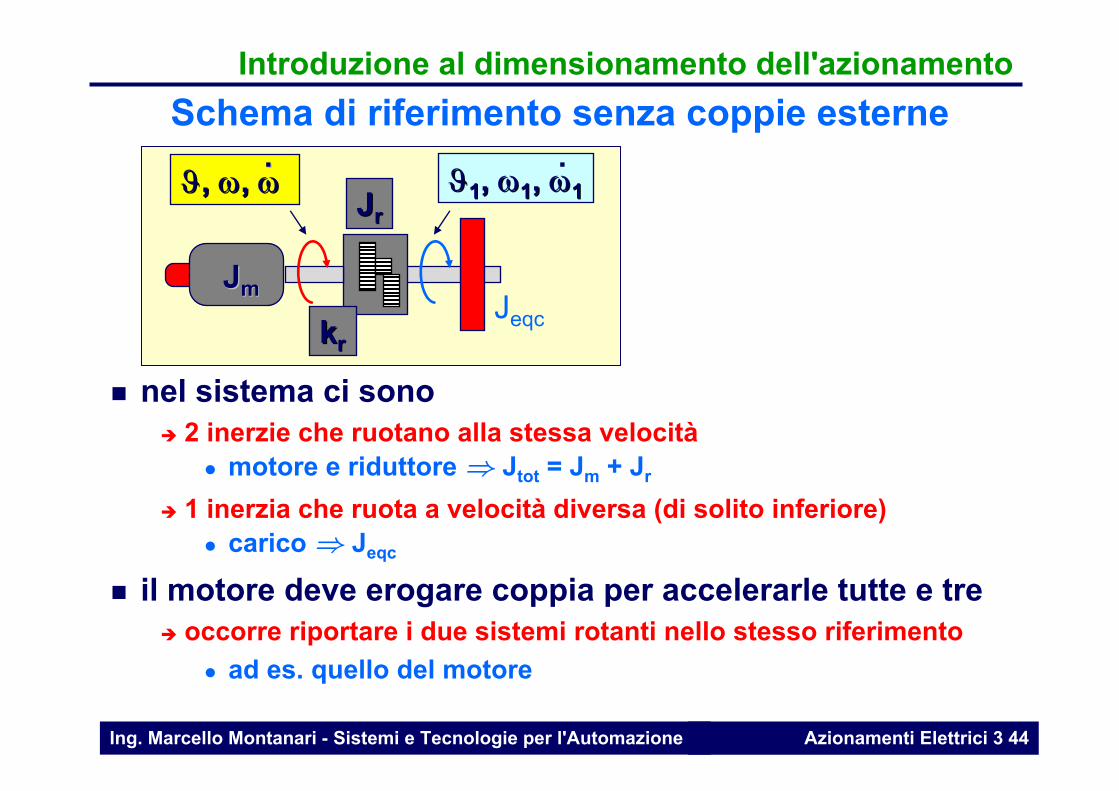
Introduzione al dimensionamento dell'azionamentoSchema di riferimento senza coppie esterne
nel sistema ci sono 2 inerzie che ruotano alla stessa velocità
motore e riduttore ⇒ Jtot = Jm + Jr
1 inerzia che ruota a velocità diversa (di solito inferiore)carico ⇒ Jeqc
il motore deve erogare coppia per accelerarle tutte e treoccorre riportare i due sistemi rotanti nello stesso riferimento
ad es. quello del motore
Jeqc
JJmm
JJrr
kkrr
ϑϑ, , ωω, , ωω..
ϑϑ11, , ωω11, , ωω11.

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 45
Introduzione al dimensionamento dell'azionamentoSchema di riferimento senza coppie esterne
modello matematico in assenza di attrito e coppie esternebilancio di coppie
la coppia erogata dal motore serve per accelerare il motore stesso + il riduttore (cacc1) e per accelerare il carico (cacc2)
( ) ( ) ( ) ( )1eqcm m r
r
J tc t J J t
kω
ω= + +
( ) ( ) ( )1 2m acc accc t c t c t= +
coppia di accelerazione del carico riportata all'asse del motore
Jeqc
JJmm
JJrr
kkrr
ϑϑ, , ωω, , ωω..
ϑϑ11, , ωω11, , ωω11.

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 46
Dimensionamento dell'azionamentoCosa significa dimensionare il motore
equazioni di dimensionamento in assenza di attrito
si possono considerare notele caratteristiche cinematiche del movimento
accelerazione e velocità al carico le caratteristiche dinamiche del carico
l'inerzia equivalente del caricoper poter dimensionare il motore occorre conoscere
il rapporto di riduzione ed il momento di inerzia del riduttoreil momento di inerzia del motore
noto solo dopo aver scelto il motoreil rapporto di riduzione del riduttore influenza la coppia che il motore deve erogare
( ) ( ) ( ) ( )1eqcm m r
r
J tc t J J t
kω
ω= + + ( ) ( )1rt k tω ω=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 47
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
su quali valori cinematici va fatto il dimensionamentosul valore massimo?
l'accelerazione (coppia) massima deve essere impressa per un periodo molto breve di tempo
sul valore medio?come va calcolato?
che ruolo gioca il rapporto di riduzione?
come varia la coppia che il motore deve erogare al variare del rapportodi riduzione?esiste un valore ottimale?
T
ϑ
ωt
t
t
ω.

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 48
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
su quali valori cinematici va fatto il dimensionamentoun motore si scalda prevalentemente per effetto Jouleesso è costruito in modo da raggiungere il corretto equilibrio termico quando è alimentato costantemente con la corrente nominale
poiché nella maggior parte dei motori la coppia èproporzionale alla corrente, ne consegue che
il motore è costruito in modo da raggiungere il corretto equilibrio termico quando eroga costantemente la coppia nominale
come si scalda un motore se non eroga una coppia costante ?occorre mettere in relazione la corrente (coppia) del moto ciclico con la corrente nominale (costante) indicata dal costruttore
si ricorre al concetto di valore efficace o root mean square (r.m.s.) per le grandezze periodicheoccorre un modello delle perdite per effetto Joule nel motore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 49
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
su quali valori cinematici va fatto il dimensionamentoModello delle perdite (per effetto Joule)
definizione di valore efficace o root mean square (r.m.s.) di una grandezza periodica x(t)
il valore efficace di una corrente periodica corrisponde al valore di una corrente continua termicamente equivalente alla corrente periodica
una corrente periodica che circola su una resistenza R dissipa la stessa potenza di una corrente continua di valore pari al suo valore efficace, che circola sulla stessa resistenza R
( )2
0
T
rms
x t dtx
T= ∫
periodo
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 50
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
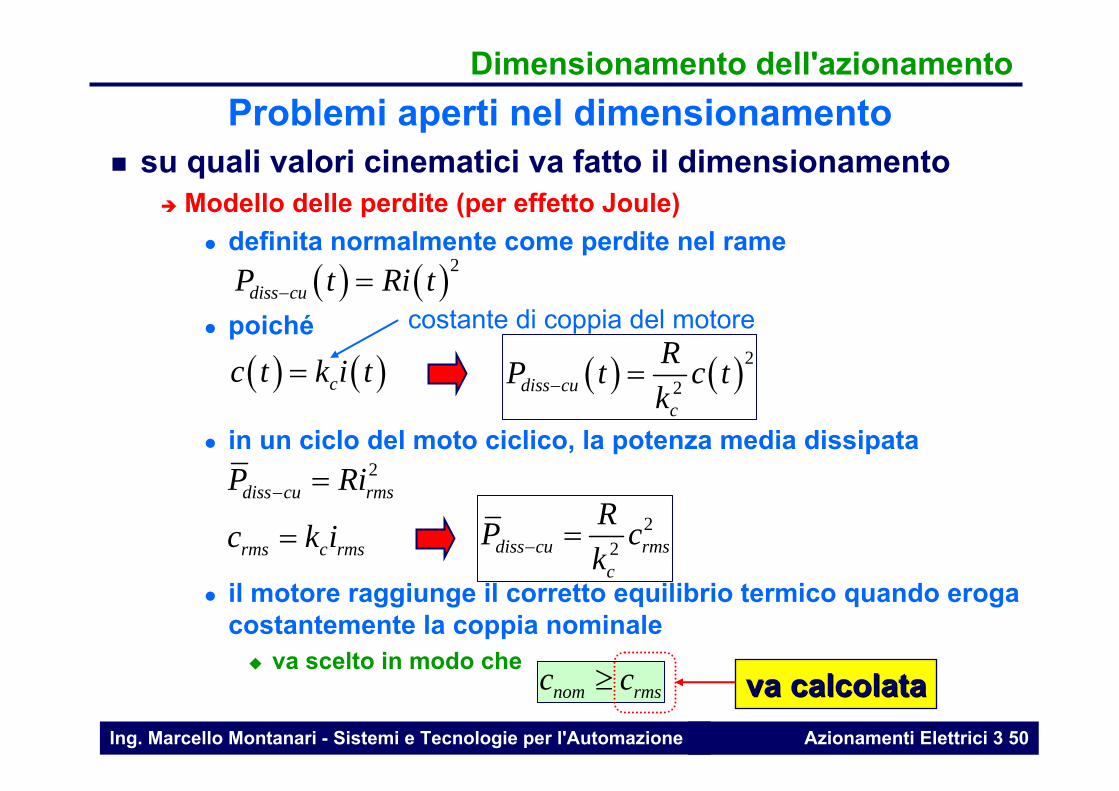
su quali valori cinematici va fatto il dimensionamentoModello delle perdite (per effetto Joule)
definita normalmente come perdite nel rame
poiché
in un ciclo del moto ciclico, la potenza media dissipata
il motore raggiunge il corretto equilibrio termico quando eroga costantemente la coppia nominale
va scelto in modo che
( ) ( )2diss cuP t Ri t− =
22diss cu rmsc
RP ck− =
( ) ( )cc t k i t= ( ) ( )22diss cuc
RP t c tk− =
2− =diss cu rmsP Ri
rms c rmsc k i=
nom rmsc c≥ va calcolatava calcolata
costante di coppia del motore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 51
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
su quali valori cinematici va fatto il dimensionamentoModello delle perdite (per effetto Joule)
coppia efficace
con profili trapezoidali di velocitàla coppia è funzione costante a tratti
profili trapezoidali di velocità sono molto utilizzati
normalizzando rispetto alla coppia massima cmax
con altri profili di moto, per il calcolo si utilizzano strumenti CAD
2i i
rms
c tc
T∗
= ∑
( )2
0
T
rms
c t dtc
T= ∫
T
cmax
t1
t2 t3 t4 t5t6
ci
1i i max ic k c k≡ ∗ ≤
t
c

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 52
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
su quali valori cinematici va fatto il dimensionamentoModello delle perdite (per effetto Joule)
da cui
il fattore di servizio δ rappresenta un "fattore di forma" della curva periodica, che relaziona il valore massimo con il valore efficace
poiché nel calcolo i valori veri della coppia sono normalizzati al valore massimo, qualunque curva che si relazioni con la precedente per un fattore di scala avrà lo stesso δcon cinematismi lineari (inerzia costante) il calcolo può quindiessere fatto indifferentemente sulla coppia o sull'accelerazione, nei diversi punti del sistema
al motore, in uscita dal riduttore o sul carico
T
cmax
tt1
t2 t3 t4 t5t6
ci2
maxi i
rms
k tc c
T∗
= ∑ fattore difattore diservizioservizio
δδ
rms maxc cδ= 1δ <con

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 53
Problemi aperti nel dimensionamentosu quali valori cinematici va fatto il dimensionamento
effetti termici di un moto cicliconel motore, l'elevata inerzia termica dovuta alle masse metalliche presenti nei circuiti magnetici (τm >10 minuti) rende le oscillazioni della temperatura nei moti ciclici molto limitate
dimensionamento sul valore efficace della coppia
Dimensionamento dell'azionamento
T
ccrms
°C
t
Temperatura del motore
Temperatura del motore concoppia costante = crms

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 54
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
su quali valori cinematici va fatto il dimensionamentoeffetti termici di un moto ciclico
nel convertitore elettronico, la bassa inerzia termica dei transistori (τt < 50ms) rende le oscillazioni della temperatura nei moti ciclici con periodo superiore al ms (sempre nelle camme) molto ampie
dimensionamento sul valore massimo della corrente
T
t
Temperatura dei transistori
T
ccrms

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 55
Dimensionamento dell'azionamentoProblemi aperti nel dimensionamento
esiste un rapporto di riduzione ottimale?proviamo a verificarlotrascuriamo gli attriti
bilancio di coppie
la coppia erogata dal motore in parte accelera il motore stesso ed in parte accelera il carico
per poter sommare le due coppie a secondo membro bisogna riportarle nello stesso riferimento di velocità
fa comodo avere la stessa accelerazione nei due termini a secondo membro
( ) 1eqcm m r
r
Jc J J
kω
ω= + +
( ) 11
eqcm m r r
r
Jc J J k
kω
ω= + +1rkω ω=
JJmm
JJrr
kkrr
ϑϑ, , ωω, , ωω..
ϑϑ11, , ωω11, , ωω11.
JJeqceqc
riferito all'ingresso
cmmotore carico
carico riportatoal motore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 56
Dimensionamento dell'azionamentoRapporto di riduzione ottimale
Si evidenzia il rapporto tra la coppia che il motore deve erogare e l'accelerazione al carico
la coppia necessaria per quella accelerazione vale
nell'espressione della coppia compare il rapporto di riduzione kr
che ruolo gioca? esiste un valore che minimizza la coppia cm data l'accelerazione al carico?
per trovarlo si può studiare la funzione
( )1
eqcmm r r
r
Jc J J kkω
= + +
( )min 0
1r
eqcm r r
r rk
Jdm J J kdk k
cω
⎡ ⎤⇒ + + =⎢ ⎥
⎣ ⎦
⎛ ⎞⎜ ⎟⎝ ⎠

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 57
Rapporto di riduzione ottimaleeguagliando a zero la derivata
si ha
da cui
ovvero
Dimensionamento dell'azionamento
( ) 0eqcm r r
r r
Jd J J kdk k
⎡ ⎤+ + =⎢ ⎥
⎣ ⎦
eqcropt
m r
Jk
J J=
+
2eqc
m rropt
JJ J
k+ =
( ) 2 0eqcm r
r
JJ J
k+ − =
Importante!!!equazione di bilanciamento delle inerzie:con il rapporto di riduzione ottimo l'inerzia del carico riportata all'asse motore eguaglia quella del motore e del riduttore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 58
Rapporto di riduzione ottimalela funzione coppia ha un minimo per
l'inerzia del riduttore è quasi sempre trascurabile rispetto a quella del motore
il rapporto di riduzione ottimo è funzione delle inerzie del carico e di quella del motore
note le inerzie del carico e del motore si può calcolare il rapporto di riduzione ottimo che garantisce la minima richiesta di coppia al motore per imporre il movimento al carico
così si può scegliere il motore di minima tagliama il rapporto ottimo si può calcolare solo dopo aver scelto il motoredeadlock!
Dimensionamento dell'azionamento
eqc eqcropt
m r m
J Jk
J J J= ≅
+

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 59
Dimensionamento dell'azionamentoEffetto di un rapporto di riduzione non ottimalesia kr* un qualunque rapporto di riduzione non ottimale
se n > 1 il rapporto scelto è superiore a quello ottimalese n < 1 il rapporto scelto è inferiore a quello ottimale
le coppie al motore necessarie nel caso di rapporto di riduzione non ottimo e ottimo sono, rispettivamente
nel rapporto delle coppie scompare l'accelerazionequanto segue è applicabile sia ai valori veri che a quelli efficaci
( )
( )
* *1*
1
eqcm m r r
r
eqcmopt m r ropt
ropt
Jc J J k
k
Jc J J k
k
ω
ω
⎡ ⎤= + +⎢ ⎥
⎣ ⎦⎡ ⎤
= + +⎢ ⎥⎢ ⎥⎣ ⎦
*r roptk nk= n≠1
( )
( )
*2
1**
2
1
⎡ ⎤+ +⎢ ⎥⎣ ⎦=⎡ ⎤+ +⎢ ⎥⎢ ⎥⎣ ⎦
m r r eqc
rm
mopt m r ropt eqc
ropt
J J k Jkc
c J J k Jk
ω
ω

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 60
Dimensionamento dell'azionamentoEffetto di un rapporto di riduzione non ottimale
da cui
e quindi
( )
( )
*2
**
2
⎡ ⎤+ +⎢ ⎥⎣ ⎦= =⎡ ⎤+ +⎢ ⎥⎢ ⎥⎣ ⎦
m r r eqc
rm
mopt m r ropt eqc
ropt
J J k Jkc
c J J k Jk
( )( )
*2
2 *m r r eqc ropt
m r ropt eqc r
J J k J kJ J k J k
+ + ⎛ ⎞⎜ ⎟+ + ⎝ ⎠
*r roptk nk=
JJeqceqc
( )
*2
2 2*
*
12
++
= =+
reqc eqc
ropt ropt eqc eqcm
mopt r eqceqc eqc
kJ Jk k n J Jc
c k J nJ J
bilanciamento delle inerzie(rapporto di riduzione ottimale)
( ) 2+ = eqcm r
ropt
JJ J
k
1/n1/nnn22
* 2 12
m
mopt
c nc n
+= incremento della coppia per
rapporto di riduzione non ottimo

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 61
Dimensionamento dell'azionamentoEffetto di un rapporto di riduzione non ottimalecm
* ⇒ coppia al motore con kr non ottimalestudiamo gli effetti della non ottimalità
* 2 12
m
mopt
c nc n
+=
*
2m
mopt
c nc
≅se n > 3
*m
mopt
cc
con rapporti di riduzione non
ottimi, sia superiori che
inferiori, la coppia necessaria può
crescere di molto:il costo di un
motore è funzione della coppia
erogataattenzione!! scala logaritmica
10-1 1 100
1
2
3
4
5
6
n > 1n < 1
*2>eqc r mJ k J
domina il carico
*2<eqc r mJ k J
domina il motore
* 12
m
mopt
cc n
≅se n < 1/3
*r roptk nk=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 62
Dimensionamento dell'azionamentoEffetto di aumento della coppia con collegamento
del motore in presa diretta (direct drive)la coppia necessaria con collegamento in presa diretta è
ricordando che se kr = 1 allora n = 1/kropt
da cui
l'incremento di coppia può essere molto significativo se l'inerzia del carico è molto maggiore di quella del motore
in questi casi il collegamento direct drive è sconsigliabile
2 12dd mopt
nc cn+
=
21 12
roptdd mopt
ropt
kc c
k+
=21
2ropt
dd moptropt
kc c
k+
=
2ropt
dd mopt
kc c≅ eqc
roptm
Jk
J≅con

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 63
Dimensionamento dell'azionamento
0 50 100 150 200 250 300 350 400-120
-100
-80
-60
-40
-20
0
20
40
60
80
Fase Master [gradi]
Grafici del Cinematismo
Vel
ocità
[rad/
sec]
0 50 100 150 200 250 300 350 400-2000
-1500
-1000
-500
0
500
1000
1500
Fase Master [gradi]
Grafici del MOTORE
Vel
ocità
[rad/
sec]
-310rad/sKr = 3
Kr = kropt = 15
Analisi cinematica
Rapporto di riduzione ottimale
ωpicco = -106.3 ωpicco = -1594

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 64
Dimensionamento dell'azionamento
0 50 100 150 200 250 300 350 400-30
-20
-10
0
10
20
30
Fase Master [gradi]
Grafici del Cinematismo
Cop
pia
tot.
[Nm
]
Cpicco = -27.3 NmCeffic. = 11.8 Nm Cpicco = -3.6 Nm
Ceffic. = 1.56 NmCpicco = -1.8 NmCeffic. = 0.78 Nm
Analisi dinamica Al riduttore (kropt)
0 50 100 150 200 250 300 350 400-4
-3
-2
-1
0
1
2
3
4
Fase Master [gradi]C
oppi
a to
t. [N
m]
Complessiva
Rapporto di riduzione ottimoRapporto di riduzione ottimo
Rapporto di riduzione ottimale

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 65
Dimensionamento dell'azionamento
0 50 100 150 200 250 300 350 400-30
-20
-10
0
10
20
30
Fase Master [gradi]
Grafici del Cinematismo
Cop
pia
tot.
[Nm
]
Cpicco = -27.3 NmCeffic. = 11.8 Nm
0 50 100 150 200 250 300 350 400-10
-8
-6
-4
-2
0
2
4
6
8
10
Fase Master [gradi]
Cop
pia
tot.
[Nm
]
Cpicco = -9.4 NmCeffic. = 4.1 Nm
Cpicco = -3.6 NmCeffic. = 1.54 Nm
Analisi dinamica Complessiva
KKrr = = kkroptropt = 15= 15
KKrr = 3= 3
Rapporto di riduzione non ottimale (vincolato da ωmmax)
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 66
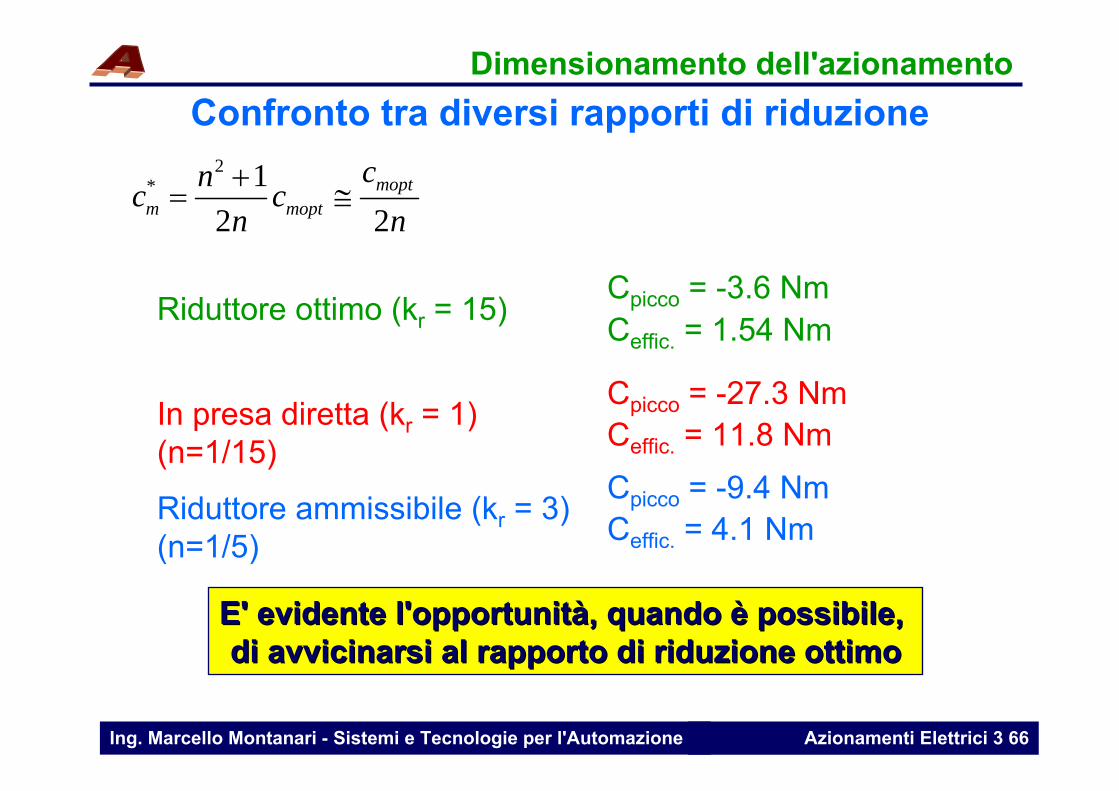
Dimensionamento dell'azionamentoConfronto tra diversi rapporti di riduzione
Cpicco = -27.3 NmCeffic. = 11.8 NmIn presa diretta (kr = 1)
(n=1/15)
Cpicco = -3.6 NmCeffic. = 1.54 NmRiduttore ottimo (kr = 15)
Cpicco = -9.4 NmCeffic. = 4.1 NmRiduttore ammissibile (kr = 3)
(n=1/5)
E' evidente l'opportunitE' evidente l'opportunitàà, quando , quando èè possibile, possibile, di avvicinarsi al rapporto di riduzione ottimodi avvicinarsi al rapporto di riduzione ottimo
2* 1
2 2+
= ≅ moptm mopt
cnc cn n
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 67
Dimensionamento dell'azionamentoRisoluzione del Deadlock nella scelta del motorese non si utilizza un rapporto di riduzione ottimo la coppia necessaria al motore può essere molto più alta del necessariose non si conosce il rapporto di riduzione non si può calcolare la coppia al motorese non si conosce il momento di inerzia del motore (noto solo dopo averlo scelto perchè dipende molto dalla coppia erogata) non si può calcolare il rapporto di riduzione ottimo
come uscirne?mentre le coppie risentono fortemente del rapporto di riduzione, come variano le potenze?
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 68
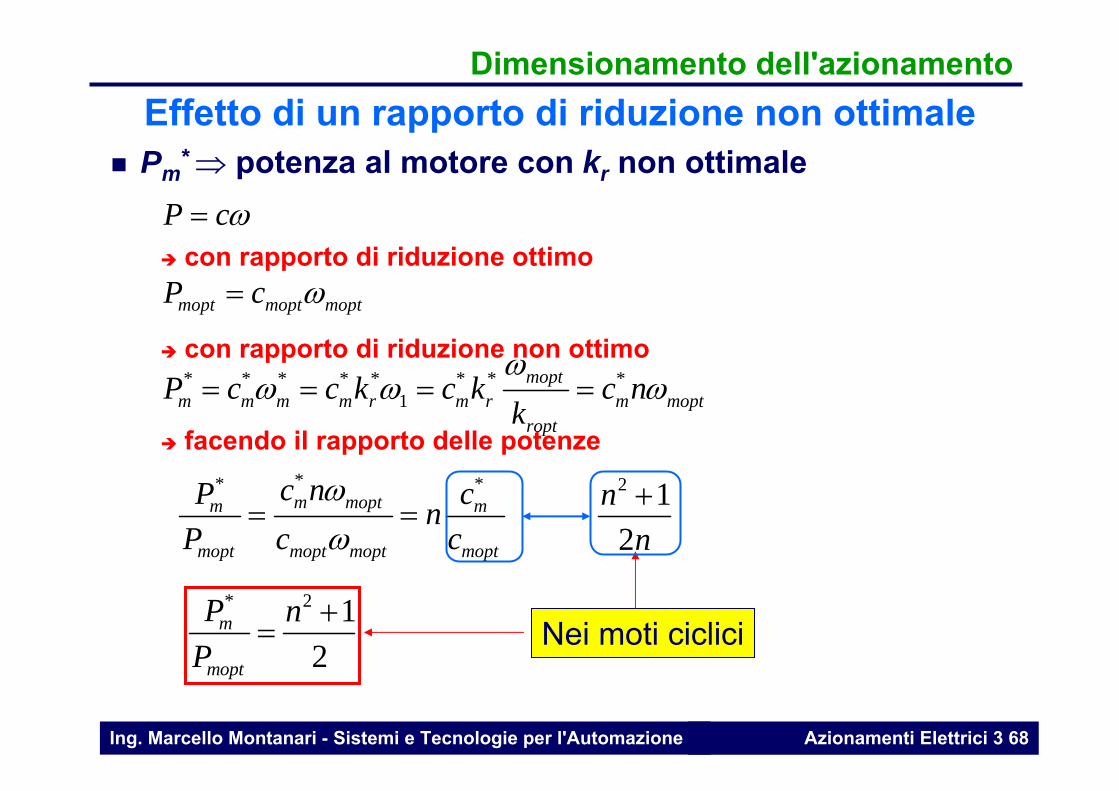
Dimensionamento dell'azionamentoEffetto di un rapporto di riduzione non ottimalePm
* ⇒ potenza al motore con kr non ottimale
con rapporto di riduzione ottimo
con rapporto di riduzione non ottimo
facendo il rapporto delle potenze
P cω=
mopt mopt moptP c ω=
* * * * * * * *1
moptm m m m r m r m mopt
ropt
P c c k c k c nkω
ω ω ω= = = =
2 12
nn+** *
m moptm m
mopt mopt mopt mopt
c nP cnP c c
ωω
= =
* 2 12
m
mopt
P nP
+= Nei moti ciclici

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 69
Dimensionamento dell'azionamentoEffetto di un rapporto di riduzione non ottimale
10-1 1 100
1
2
3
4
5
6
7
8
9
zona di lavoro consigliata (1/2 < n < 1)la coppia cresce meno di un fattore 1.5
*m
mopt
PP
*m
mopt
cc
evitare di utilizzare un rapporto di riduzione superiore a quello ottimo:sia la coppia che la potenza sono molto superiori ai valori ottenibili con riduttore ottimo
punto di lavoro ottimale

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 70
Dimensionamento dell'azionamentoEffetto di un rapporto di riduzione non ottimale
con n << 1 potenza richiesta circa metà di quella ottimacollegamento in presa diretta, senza riduttore (Jm << Jeqc)
la potenza in gioco è essenzialmente quella del carico
10-1 1 100
1
2
3
4
5
6
7
8
9 *m
mopt
PP
*m
mopt
cc

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 71
Dimensionamento dell'azionamentoAlcune considerazioni sulla potenza nei moti ciclici
mentre la coppia è una funzione ben definita, se sono note le caratteristiche cinematiche del movimento (velocità ed accelerazioni) le caratteristiche inerziali dei dispositivi presenti
nel calcolo della potenza entra anche la velocitàsituazione tipica
avvio del motocoppia alta e bassa velocità
moto uniformebassa coppia ed alta velocità
la potenza è stata introdotta solo come rapporto (rispetto alla ottima), per eliminare l'effetto della velocità
può essere utile introdurre il concetto di "potenza efficace", intesa come prodotto della velocità per la coppia efficaceÈ possibile calcolarla (in modo approssimato) prima di aver scelto il motore

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 72
Dimensionamento dell'azionamentoAlcune considerazioni sulla potenza nei moti ciclici
dall'analisi della potenza si ha che con collegamento in presa diretta (n=1/kropt<<1) la potenza in gioco vale
Pdd è quindi una stima per difetto della potenza ottimase si scegliesse un motore dimensionato in presa diretta, la suapotenza sarebbe inferiore, al massimo di un fattore 2, a quella necessaria
potrebbe essere un buon punto di partenza per un algoritmo iterativo di scelta
nel caso di collegamento in presa diretta, l'inerzia del carico domina quelle del motore, per cui il calcolo della potenza può essere fatto, per difetto ma di poco, considerando solo il carico senza considerare il motore
nel calcolo della potenza al carico si utilizza il concetto di potenza efficace
2opt
dd
PP ≅

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 73
Algoritmo per il dimensionamento del motorePasso 0 – calcolo del fattore di servizio δ
rappresenta un "fattore di forma" della coppia al motorepuò essere calcolato su qualunque curva che si differenzi da quella di coppia per un fattore di scala
la coppia al motore è proporzionale a quella al carico la coppia al carico è proporzionale all'accelerazione al caricoil calcolo può essere fatto sul profili di accelerazione al carico
normalizzazione dei valori di accelerazione
calcolo del fattore di servizio
Dimensionamento dell'azionamento
Ttk ii∑ ∗
=2
δ
ii
max
aka
=ai
amax
T
v
a
t
t
vmax
t1
t2 t3 t4 t5t6
rms maxc cδ=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 74
Algoritmo per il dimensionamento del motorenell'algoritmo, le grandezze con l'asterisco rappresentano valori di tentativo, non ancora scelti definitivamente
Passo 1 – calcolo della potenza efficace al caricoa partire da calcoli svolti solo sul carico equivalente rotante
oppure, direttamente sull'eventuale cinematismo traslante
il motore definitivo dovrebbe avere potenza compresa tra P*ceff e 2P*ceff
Vedi caso di motore in presa diretta
Dimensionamento dell'azionamento
( )1 1*1
+=
eqc max r
ceff max
J cP
δ ωω
η
( )* maxceff max
Ma fP v
δ
η
+=
coppia resistente, se c'è
stima del rendimento complessivo del cinematismo
forza resistente, se c'è
coppia efficace crms

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 75
Algoritmo per il dimensionamento del motorePasso 2 – scelta di un motore di partenza
dal catalogo del fornitore utilizzato si sceglie un motore con potenza immediatamente superiore a quella calcolata
si ricorda che le taglie dei motori sono fortemente quantizzate e la variazione tra due taglie è spesso di un fattore tra 1,5 e 2esempio
se P*ceff = 1.15 kW e nel catalogo si trovano un motore da 1 kW ed uno da 1.5kW, si prende quello da 1.5 kW
dai data-sheet del motore si rilevanocoppia nominale e coppia massima (c*mnom e c*mmax)velocità nominale (ω*nom)momento di inerzia (J*m)
Passo 3 – calcolo del rapporto di riduzione ottimo
Dimensionamento dell'azionamento
eqcropt
m
Jk
J≅

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 76
Algoritmo per il dimensionamento del motorePasso 4 – scelta del rapporto di riduzione
si calcola la velocità del motore in corrispondenza della massima velocità del carico
alla massima velocità del carico, il motore dovrà girare entro la sua velocità nominale
se
kropt va benese
kropt è troppo grande, per cui si sceglie il massimo rapporto di riduzione che fa girare il motore entro la sua velocità nominale
Dimensionamento dell'azionamento
* *max nomω ω≤
** nomr
1max
k ωω
=
* *max nomω ω>
* =r roptk k
* =max ropt 1maxkω ω

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 77
Algoritmo per il dimensionamento del motorePasso 5 – verifica del dimensionamento
si riportano all'asse motore le grandezze al carico
si calcola il momento di inerzia totale all'asse motore
si calcola la coppia massima al motore
si calcola la coppia efficace al motore
Dimensionamento dell'azionamento
* *1
* *1
max r max
max r max
k
k
ω ω
ω ω
=
=
**2eqc
eqr
JJ
k=
* * * *tot m r eqJ J J J= + +
* *rms maxc cδ=
* * *max tot maxc J ω=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 78
Algoritmo per il dimensionamento del motorePasso 5 – verifica del dimensionamento
verifica del dimensionamento termico
verifica del dimensionamento meccanico
se anche una sola delle due (di solito quella termica) non èverificata, il motore di tentativo è sottodimensionato
si sceglie allora un altro motore di taglia immediatamente superiore al precedente e si ricomincia dal Passo 2
se entrambe le disuguaglianze sono verificate, il motore ècorrettamente dimensionato
essendo partiti da un motore di poco sottodimensionato, l'algoritmo converge in poche iterazioni
Dimensionamento dell'azionamento
( )* *1 *max r r
mmax
c c kc
η
+<
( )* *1 *rms r r
mnom
c c kc
η
+<

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 79
Dimensionamento dell'azionamentoEsempio
tipo di motointermittoreprofili di moto trapezoidali
velocità di macchina = 60 cicli/minPeriodo T = 1s
Tempo di salita Ts = 0.3scaratteristiche del profilo di moto
momento di inerzia del carico Jc = 10 kgm2
altri datirendimento del cinematismo η = 0.8non ci sono coppie resistenti esterneil sistema opera a temperatura < 40°C ed altezza < 1000 m
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJcc
ω1
t
tω1.
t
ϑ1
TTs
21
1
40 /4 /
max
max
rad srad s
ωω
==

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 80
Dimensionamento dell'azionamentoEsempio
Passo 0 calcolo del fattore di servizio δ
lo eseguo sul profilo di accelerazione al carico
dalla figura
da cui
e quindi
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
Ttk ii∑ ∗
=2
δ1
1
ii
max
k ωω
=
1
2
11
kk
== −
1
2
.1.1
t st s
==
k1
k2t1
t2
ω1
t
tω1.
t
ϑ1
TTs2 2
1 1 2 2 .1 .1 .21
k t k tT
δ + += = =
.2 .45δ = =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 81
Dimensionamento dell'azionamentoEsempio
Passo 1 stima della potenza al carico
è l'unico dato che posso calcolare a priori, senza aver scelto il motore
ci aspettiamo che il motore definitivo abbia una potenza Pm
* *2c m cP P P< <
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
* 11
c maxc max
JP δ ωωη
=
* .45*10*404 900.8cP W= =
kr=1 kropt
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max
900 1800mW P W< <

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 82
Dimensionamento dell'azionamentoEsempio
Passo 2 scelta di un motore di tentativo
dal catalogo trovo motore L75/C con potenza 900 Wesiste sia in versione standard che a bassa inerzia
dal data sheet
nella versione a bassa inerzia Jm = .15x10-3 kgm2
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
rad/s300ω*mnom
kgm2.21x10-3J*m
Nm9.3c*mmax
Nm2.8c*mnom adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 83
Dimensionamento dell'azionamentoEsempio
Passo 3 calcolo del rapporto di riduzione ottimo
Passo 4scelta del rapporto di riduzione
si ha che
non si può usare il riduttore ottimo
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max** 3
10 218.21*10
cropt
m
JkJ −= = =
* * 218*4 872 /max ropt 1maxk rad sω ω= = =
* * 300 /max nom rad sω ω> =
*
1max
300 754
nomrk ω
ω= = = rad/s300ω*mnom
kgm2.21x10-3J*m
Nm9.3c*mmax
Nm2.8c*mnom

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 84
Dimensionamento dell'azionamentoEsempio
Passo 5riporto le grandezze all'albero motore JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max
* *1
* * 21
75*4 300 /
75*40 3000 /max r max
max r max
k rad s
k rad s
ω ω
ω ω
= = =
= = =
* 3 2*2 2
10 1.7*1075
ceq
r
JJ kgmk
−= = =
* * * 3 3 3 2.21*10 1.7*10 1.91*10tot m eqJ J J kgm− − −= + = + =
* * .45*5.73 2.57rms maxc c Nmδ= = =
* * * 3 31.91*10 *3*10 5.73max tot maxc J Nmω −= = =
rad/s300ω*mnom
kgm2.21x10-3J*m
Nm9.3c*mmax
Nm2.8c*mnom

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 85
Dimensionamento dell'azionamentoEsempio
Passo 5verifico il dimensionamento
dimensionamento termico
dimensionamento meccanico
il motore è sottodimensionato termicamentetorna al passo 2
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max
* 2.57rmsc Nm=* 5.73maxc Nm=
**
5.73 7.1 9.3.8
maxmmax
c c
Nm Nm
η<
= <
**
2.57 3.2 2.8.8
rmsmnom
c c
Nm Nm
η<
= <
rad/s300ω*mnom
kgm2.21x10-3J*m
Nm9,3c*mmax
Nm2.8c*mnom
No !!
Si

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 86
Dimensionamento dell'azionamentoEsempio
Passo 2 scelta di un motore di tentativo
dal catalogo trovo motore L75/D con coppia > 3.2 Nmesiste sia in versione standard che a bassa inerzia
dal data sheet
nella versione a bassa inerzia Jm = .19x10-3 kgm2
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
rad/s300ω*mnom
kgm2.25x10-3J*m
Nm12c*mmax
Nm3.6c*mnom adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 87
Dimensionamento dell'azionamentoEsempio
Passo 3 calcolo del rapporto di riduzione ottimo
Passo 4scelta del rapporto di riduzione
si ha che
non si può usare il riduttore ottimo
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max** 3
10 200.25*10
cropt
m
JkJ −= = =
* * 200*4 800 /max ropt 1maxk rad sω ω= = =
* * 300 /max nom rad sω ω> =
*
1max
300 754
nomrk ω
ω= = = rad/s300ω*mnom
kgm2.25x10-3J*m
Nm12c*mmax
Nm3.6c*mnom
lo stesso di prima

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 88
Dimensionamento dell'azionamentoEsempio
Passo 5riporto le grandezze all'albero motore JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max
* *1
* * 21
75*4 300 /
75*40 3000 /max r max
max r max
k rad s
k rad s
ω ω
ω ω
= = =
= = =
* 3 2*2 2
10 1.7*1075
ceq
r
JJ kgmk
−= = =
* * * 3 3 3 2.25*10 1.7*10 1.95*10tot m eqJ J J kgm− − −= + = + =
* * .45*5.85 2.63rms maxc c Nmδ= = =
* * * 3 31.95*10 *3*10 5.85max tot maxc J Nmω −= = =
rad/s300ω*mnom
kgm2.25x10-3J*m
Nm12c*mmax
Nm3.6c*mnom

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 89
Dimensionamento dell'azionamentoEsempio
Passo 5verifico il dimensionamento
dimensionamento termico
dimensionamento meccanico
il motore è dimensionato correttamentefine in due iterazioni
JJmm
kkrrϑϑ, , ωω, , ωω.. ϑϑ11, , ωω11, , ωω11
.
JJeqceqc
adim..45√δadim..8ηkgm210Jc
rad/s240ω'1max
rad/s4ω1max
* 2.63rmsc Nm=* 5.85maxc Nm=
**
5.85 7.3 12.8
maxmmax
c c
Nm Nm
η<
= <
**
2.63 3.3 3.6.8
rmsmnom
c c
Nm Nm
η<
= < Si
Si rad/s300ω*mnom
kgm2.25x10-3J*m
Nm12c*mmax
Nm3.6c*mnom

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 90
Dimensionamento dell'azionamentoProblemi termici al convertitore
Il convertitore fornisce extracorrente (kextraInom ) per un tempo limitato
kextra = 1.5 ÷ 3due casi
extracorrente per un tempo fissoextracorrente in funzione della potenza dissipata
tempo inversamente proporzionale al valoreil comportamento dinamico e la capacità di controllare le coppie di carico non sono costanti
assi singolisi può sfruttare l’extracorrente per ottimizzare i costi
assi coordinatiper garantire il sincronismo occorre fare molta attenzione alla saturazione di corrente

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 91
Dimensionamento del convertitoregrandezze utili
inom = valore nominale della corrente erogata dal convertitore (A)corrente erogabile indefinitamente
imax = valore massimo della corrente erogata dal convertitore (A)corrente erogabile per un tempo limitato (di solito almeno 1s)
si può utilizzare nei moti periodici se imax è erogabile per un tempo abbastanza superiore al periodo T
kc = costante di coppia del motore (Nm/A)c = kc i
kextra = fattore di extracorrente (adimensionale)imax = kextra inom
= fattore di servizio del ciclo di movimento (adimensionale)crms = cmax
Dimensionamento dell'azionamento
δδ

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 92
Dimensionamento dell'azionamentoDimensionamento del convertitore
il convertitore si sceglie per la sua corrente nominaleva quindi dimensionato su questa
l'extracorrente è parametro ulteriorePasso 1 - si sceglie dal catalogo un convertitore con una corrente nominale
Passo 2 – si verifica se la sua corrente massima
( )* *1rms r r
nomc
c c ki
kη
+>
costante di coppia
coppia ideale da erogare
rendimento meccanico
( )* *1max r r
maxc
c c ki
kη
+>

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 93
Dimensionamento del convertitorePasso 2 – verifica della corrente massima
se
la scelta è completata (tipico)dimensionamento sul valore nominale
se no, si deve aumentare la corrente nominale in modo che
dimensionamento sul valore massimo
* *11 max r r
nomextra c
c c kik kη
⎛ ⎞+> ⎜ ⎟
⎝ ⎠
Dimensionamento dell'azionamento
corrente massima da erogare
( )* *1max r r
maxc
c c ki
kη
+>

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 94
Dimensionamento dell'azionamentoEsempio di dimensionamento del convertitore
seguito dell'esempio di dimensionamento del motorePasso 1 - si sceglie dal catalogo un convertitore con una corrente nominale
il coefficiente di extracorrente per questo convertitore è kextra = 2imax = 4 A
Passo 2 – verifica sulla corrente massima
* 2.63 2.8*1.6
rmsnom
c
ci Akη
> = =
*
5.854 4.6.8*1.6
maxmax
c
cik
A A
η>
> = No !!

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 95
Dimensionamento del convertitorePasso 2 – verifica sulla corrente massima
dimensionamento sul valore massimosi deve aumentare la corrente nominale in modo che
dal catalogo scelgo un convertitore con corrente nominale superiore a 2.3 A e kextra ≥ 2
ad esempio inom = 2.5 Aspesso le taglie di corrente disponibile non sono molte, per cui il convertitore può risultare sovradimensionato
essendo un elemento critico, la cui affidabilità è fortemente influenzata dalla temperatura di esercizio dei suoi transistori,un limitato sovradimensionamento può essere anche opportuno
*1 1 5.85 2.32 .8*1.6
maxnom
extra c
ci Ak kη
> > =
Dimensionamento dell'azionamento

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 96
Dimensionamento dell'azionamentoFattori critici nel dimensionamento
dipendenza dalla traiettoria presceltagrandezze cinematiche
velocità massimavincolo sul massimo rapporto di riduzione
grandezze dinamichecoppia massima
non è quasi mai il fattore limitante per la scelta del motore coppia efficace
è normalmente il fattore limitante per la scelta del motoreCAD per il calcolo
rapporto di riduzione ottimaleil bilanciamento delle inerzie minimizza la coppia al motore
è una procedura iterativa facilitata da strumenti di CAD

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 97
Dimensionamento dell'azionamentoAlcune considerazioni sull'uso di motori a bassa
inerziala disponibilità di nuovi materiali magnetici a terre rare, caratterizzati da una elevatissima forza coercitiva, ha consentito di ridurre le dimensioni dei magneti e quindi l'inerzia rotorica di un fattore superiore a 2
dallo stesso costruttore sono spesso disponibili due tipologie di motori
con magneti ceramici a basso costo inerzie standard
con magneti a terre rare a costo più elevatoa bassa inerzia
l'analisi sul riduttore ottimo svolta in precedenza ci aiuta a capire se e quando può essere utile ricorrere ai piùcostosi motori a bassa inerzia

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 98
Alcune considerazioni sui motori a bassa inerziale equazioni che ci aiutano a comprendere sono
per semplicità si trascura l'inerzia del riduttore
se n = 1
la coppia erogata dal motore è divisa in parti ugualise n < 1
la coppia serve prevalentemente ad accelerare il caricose n > 1
la coppia serve prevalentemente ad accelerare il motore
Dimensionamento dell'azionamento
2eqc
mr
JJ
k≅
2eqc
m mr
Jc J
kω ω= + coppia per accelerare il carico
coppia per accelerare il motorer roptk nk=
r roptk k=
r roptk k<2
eqcm
r
JJ
k<
r roptk k>2
eqcm
r
JJ
k>

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 99
Alcune considerazioni sui motori a bassa inerzia3 casi
a) il rapporto di riduzione ottimo può essere usato; la velocità di rotazione richiesta è prossima a quella massima del motore
Non si può aumentare ulteriormente kr
siamo nel caso con n = 1
dimezzare l'inerzia del motore (che utilizza il 50% della coppia) comporta teoricamente una riduzione del 25% della coppia totale necessaria
ricordando che la quantizzazione delle taglie dei motori comporta variazioni di un fattore 1,5 – 2 tra due taglie consecutive, l'utilizzo di un motore a bassa inerzia è giustificato solo se consente di ridurre di una taglia il motore
Dimensionamento dell'azionamento
2eqc
mr
JJ
k≅r roptk k=
eqcropt
m
Jk
J≅

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 100
Alcune considerazioni sui motori a bassa inerzia3 casi
b) il rapporto di riduzione ottimo può essere usato; la velocità di rotazione richiesta è inferiore a quella massima del motore
a differenza del caso precedente, qui il rapporto di riduzione può essere aumentato, per cui dimezzare l'inerzia del motore
fa aumentare il rapporto di riduzione ottimo di un fattore √2il nuovo rapporto ottimo può stavolta essere utilizzato con una conseguente significativa riduzione di coppiaè giustificato pensare all'utilizzo di un motore a bassa inerzia
c) il rapporto di riduzione ottimo non può essere usato perchètroppo grande (limitazione velocità massima del motore)
siamo nel caso n < 1
dimezzare l'inerzia del motore significa dimezzare il contributodi un termine che già conta poco
non ha senso spendere più soldi per un motore a bassa inerzia
Dimensionamento dell'azionamento
r roptk k<2 2
eqc m
r
J Jk n
≅ 2eqc
m mr
Jc J
kω ω= +

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 101
Alcune considerazioni sui motori a bassa inerzialo studente è invitato a verificare la convenienza dell'uso della versione a bassa inerzia del motore nell'esercizio di dimensionamento svolto in precedenza
in quale situazione ci si trova ?
Dimensionamento dell'azionamento

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 102
Dimensionamento dell'azionamentoAlcune considerazioni sull'uso di motori a bassa
inerzia e sulla velocità massima del motorela disponibilità di nuovi materiali magnetici a terre rare, caratterizzati da una elevatissima forza coercitiva, ha consentito di ridurre le dimensioni dei magneti e quindi l'inerzia rotorica di un fattore superiore a 2
dallo stesso costruttore sono spesso disponibili due tipologie di motori
con magneti ceramici a basso costo inerzie standard
con magneti a terre rare a costo più elevatoa bassa inerzia
spesso sono disponibili anche versioni dello stesso motore con diversa velocità massima
diversa tensione di alimentazione

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 103
Bassa inerzia e velocità massimale equazioni che ci aiutano a comprendere sono
per semplicità si è trascurata l'inerzia del riduttoresia il motore che il carico contribuiscono a determinare il valore della coppia data una accelerazione al caricoal variare del rapporto di riduzione il peso dei due termini cambia simmetricamente
se uno dei due cala l'altro cresce e viceversa con il riduttore ottimo i due termini sono uguali
Dimensionamento dell'azionamento
1
eqcmm r
r
Jc J kkω
= + contributo del carico
contributo del motore
cropt
m
JkJ
=1
maxrmax
max
k ωω
=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 104
Bassa inerzia e velocità massimaal termine del dimensionamento, effettuato con motori a inerzia e velocità massima standard si ha
a) krmax = kropt
la velocità massima del motore è adeguatasi sceglie il rapporto di riduzione ottimo
b) krmax < kropt
la velocità massima del motore è troppo bassasi sceglie il rapporto di riduzione massimo
b) krmax > kropt
la velocità massima del motore è troppo altasi sceglie il rapporto di riduzione ottimo
per ridurre ulteriormente la coppia al motore si può agiresull'inerzia del motoresulla velocità massima del motoresu entrambe
Dimensionamento dell'azionamento

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 105
Dimensionamento dell'azionamentoBassa inerzia e velocità massima
Discussione del problema con un esempioIpotesi sul carico
l'inerzia è costantemomento di inerzia Jc = 10 kgm2
si assumono diverse velocità massime per riprodurre le tre situazioni individuate nel lucido precedente
a) ω1max = 9 rad/sb) ω1max = 3 rad/sa) ω1max = 1 rad/s
Ipotesi sui motoriil dimensionamento è stato fatto con motori standardsono inoltre disponibili motori
a bassa inerzia con inerzia ridotta di un fattore 2con velocità massima ridotta ed aumentata di un fattore 2

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 106
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
al termine del dimensionamento con motori standard si hainerzia del carico Jm= 10 kgm2
inerzia del motore Jm= 10-3 kgm2
velocità del motore ωmax = 300 rad/srapporto di riduzione ottimo
coppia al motore e rapporto coppia/accelerazione
nel seguito si utilizzerà il rapporto tra la coppia al motore e l'accelerazione al carico per discutere il problema indipendentemente dalla accelerazione al caricoovviamente il valore ottenuto non è una coppia bensì un inerzia
Dimensionamento dell'azionamento
3
10 10010
cropt
m
JkJ −= = =
1c
m m rr
Jc J kk
ω⎛ ⎞
= +⎜ ⎟⎝ ⎠ 1
m cm r
r
c JJ kkω
= +

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 107
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso a) – velocità massima al carico ω1max = 3 rad/s
uso il rapporto di riduzione ottimocalcolo il rapporto coppia/accelerazione
il rapporto coppia/accelerazione risulta minimo per quel motore perchè il rapporto di riduzione è quello ottimo
verifica del dimensionamento utilizzando un motore a bassa inerzia e/o diversa velocità massima
Dimensionamento dell'azionamento
1
300 1003
maxrmax
max
k ωω
= = =
1
m cm rmax
rmax
c JJ kkω
= + 3 1 1 21010 *100 10 10 .2100
kgm− − −= + = + =
100roptk =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 108
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso a) – velocità massima al carico ω1max = 3 rad/s a1) verifico con un motore a bassa inerzia JmBI = .5*Jm
calcolo il rapporto coppia/accelerazione
risulta ridotto del 25% perchè si è dimezzato un termine che valeva il 50%
a2) verifico con un motore a velocità diversanon ha senso perchè porta il rapporto di riduzione a valori non ottimi
a3) verifico con un motore a bassa inerzia e velocità superiorecon il motore a bassa inerzia cambia anche il rapporto di riduzione ottimo che diventa
Dimensionamento dell'azionamento
1
mBI cmBI rmax
rmax
c JJ kkω
= + 3 21 110.5*10 *100 .5*10 10 .0
51
10
kgm− − −= + == +
3
10 141.5*10
cropt
mBI
JkJ −= = ≅

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 109
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso a) – velocità massima al carico ω1max = 3 rad/s a3) verifico con un motore a bassa inerzia e velocità superiore
scelgo un motore con velocità superiore a
poi scelgo un riduttore con rapporto di riduzione ottimo kr = 141
il rapporto coppia/accelerazione risulta ridotto del 30% rispetto al dimensionamento inizialel'incremento della velocità massima del motore ha portato una ulteriore riduzione del 5% rispetto al solo uso del motore a bassa inerziasi valuterà se vale la pena sulla base dei costi
Dimensionamento dell'azionamento
1
mBI cmBI rmax
rmax
c JJ kkω
= + 23 10.5*10 *141 .07 .07141
.14kgm−= + = + =
1 *141 3*141 423 /max max rad sω ω> = =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 110
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso b) – velocità massima al carico ω1max = 9 rad/s
non posso utilizzare il riduttore ottimocalcolo il rapporto coppia/accelerazione
il rapporto coppia/accelerazione risulta superiore del 65% al valore ottimo perchè il rapporto di riduzione massimo èinferiore a quello ottimo
verifica del dimensionamento utilizzando un motore a bassa inerzia e/o diversa velocità massima
Dimensionamento dell'azionamento
1
300 339
maxrmax
max
k ωω
= = ≅
1
m cm r
r
c JJ kkω
= + 3 1 1 21010 *33 .33*10 3*10 .3333
kgm− − − == + = +
100roptk =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 111
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso b) – velocità massima al carico ω1max = 9 rad/s b1) verifico con un motore a bassa inerzia JmBI = .5*Jm
calcolo il rapporto coppia/accelerazione
risulta ridotto del 4% perchè si è dimezzato un termine che valeva già molto poco
b2) verifico con un motore a velocità superiore ωmaxvs = 2ωmax
il rapporto di riduzione è ancora inferiore a quello ottimocalcolo il rapporto coppia/accelerazione
il rapporto coppia/accelerazione è prossimo a quello ottimo (-36%)
Dimensionamento dell'azionamento
1
m cm r
r
c JJ kkω
= + 3 1 1 210.5*10 *33 .16*10 3*10 .3 633
1 kgm− − − == + = +
max
1
600 669
vsrmax
max
k ωω
= = ≅
1
m cm r
r
c JJ kkω
= + 3 1 1 21010 *66 .66*10 1.5*10 .2166
kgm− − −= + = + =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 112
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso b) – velocità massima al carico ω1max = 9 rad/s b3) verifico con un motore a velocità superiore e bassa inerzia
il rapporto coppia/accelerazione è ulteriormente ridotto del 18% ed è ora inferiore a quello ottimo con motore standard
la soluzione con motore più veloce a bassa inerzia è quella che dàil massimo miglioramento
riduzione del 45% del rapporto coppia/accelerazione rispetto al dimensionamento standard
Dimensionamento dell'azionamento
1
m cm r
r
c JJ kkω
= + 23 1 110.5*10 *66 .33*10 1.5*10 36
.16
8 kgm− − − == + = +

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 113
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso c) – velocità massima al carico ω1max = 1 rad/s
uso il rapporto di riduzione massimocalcolo il rapporto coppia/accelerazione
il rapporto coppia/accelerazione risulta superiore del 65% rispetto al valore ottimo perchè il rapporto di riduzione massimo è superiore a quello ottimoil motore domina il dimensionamento
non ha senso far andare il motore ad una velocità superiore a quella corrispondente al riduttore ottimo
Dimensionamento dell'azionamento
1
300 3001
maxrmax
max
k ωω
= = =
1
m cm r
r
c JJ kkω
= + 3 1 1 21010 *300 3*10 .3*103
.3300
kgm− − −= + == +
100roptk =
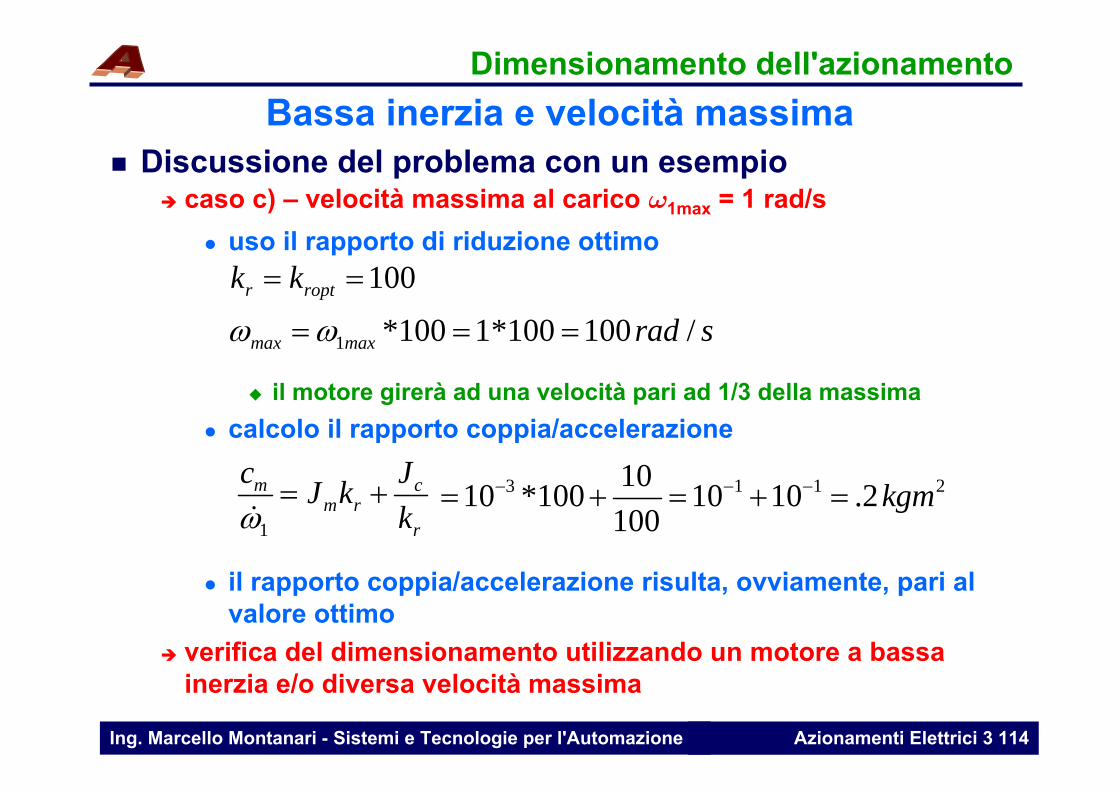
Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 114
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso c) – velocità massima al carico ω1max = 1 rad/s uso il rapporto di riduzione ottimo
il motore girerà ad una velocità pari ad 1/3 della massimacalcolo il rapporto coppia/accelerazione
il rapporto coppia/accelerazione risulta, ovviamente, pari al valore ottimo
verifica del dimensionamento utilizzando un motore a bassa inerzia e/o diversa velocità massima
Dimensionamento dell'azionamento
100r roptk k= =
1
m cm r
r
c JJ kkω
= + 3 1 1 21010 *100 10 10 .2100
kgm− − −= + = + =
1 *100 1*100 100 /max max rad sω ω= = =

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 115
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso c) – velocità massima al carico ω1max = 1 rad/s c1) verifico con un motore a bassa inerzia JmBI = .5*Jm
calcolo il rapporto coppia/accelerazione
risulta ridotto del 25% perchè si è dimezzato un termine che valeva il 50%
c2) verifico con un motore a velocità superiore ωmaxvs = 2ωmax
non ha senso perchè il motore standard era già troppo velocec3) se uso un motore a bassa inerzia il rapporto di riduzione ottimo cresce
posso usare il rapporto ottimo (x1.4) perchè il motore a velocitàstandard stava girando ad 1/3 della sua velocità massima
Dimensionamento dell'azionamento
1
m cm r
r
c JJ kkω
= + 3 21 110.5*10 *100 .5*10 10 .0
51
10
kgm− − −= + == +
3
10 141.5*10
cropt
mBI
JkJ −= = ≅

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 116
Bassa inerzia e velocità massimaDiscussione del problema con un esempio
caso c) – velocità massima al carico ω1max = 1 rad/s c3) uso un motore a bassa inerzia ed aumento il rapporto di riduzione fino al nuovo valore ottimo (kr = 141)
calcolo il rapporto coppia/accelerazione
l'uso del motore a bassa inerzia con velocità standard, unitamente all'uso di un nuovo rapporto di riduzione (ottimo), ha portato ad un rapporto coppia/accelerazione inferiore a quello ottimo con motore standard, con una ulteriore riduzione del 30%
Dimensionamento dell'azionamento
1
m cm r
r
c JJ kkω
= + 3 1 1 210.5*10 *141 .7*10 .7*101
1441
. kgm− − −= + == +

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 117
Sintesi su Bassa inerzia e velocità massimaCaso a) - la velocità massima del motore è adeguata
motore e carico incidono sulla coppia in modo equivalentel'uso di un motore a bassa inerzia
è utile per ridurre la coppia dimezza un termine che vale il 50% del totale
l'uso di un motore a velocità diversanon è utile
l'uso di un motore a bassa inerzia e velocità massima superiore
contribuisce ad un ulteriore diminuzione della coppia perchè la bassa inerzia ha aumentato il rapporto di riduzione ottimo
la soluzione preferibile in questa situazione èmotore a bassa inerzia e velocità superiore
Dimensionamento dell'azionamento
rmax roptk k≅ eqcm r
r
JJ k
k≅r roptk k=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 118
Sintesi su Bassa inerzia e velocità massimaCaso b) - la velocità massima del motore è troppo bassa
il contributo maggiore alla coppia è dato dal caricol'uso di un motore a bassa inerzia
non è utile per ridurre la coppiariduce un termine che è una frazione del totale
l'uso di un motore a velocità superioreè utile per ridurre la coppiaconsente di avvicinare il rapporto di riduzione a quello ottimo
la soluzione preferibile in questa situazione èmotore a velocità superiore ed inerzia standard
Dimensionamento dell'azionamento
rmax roptk k<< eqcm r
r
JJ k
k<<r rmaxk k=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 119
Sintesi su Bassa inerzia e velocità massimaCaso c) - la velocità massima del motore è troppo alta
si deve utilizzare il rapporto di riduzione ottimol'uso di un motore a bassa inerzia
è utile per ridurre la coppiaaumenta il rapporto di riduzione ottimo
se si usa un motore a bassa inerzia è bene aumentare il rapporto di riduzione fino al nuovo valore ottimo
di solito si può ancora utilizzare il motore a velocità standarduso di un motore a velocità diversa
maggiore non ha senso: il motore standard è già troppo veloce inferiore ha senso se si mantiene l'inerzia standard
la soluzione preferibile in questa situazione èmotore a bassa inerzia e velocità standard
Dimensionamento dell'azionamento
r roptk k>> eqcm r
r
JJ k
k≅r roptk k=

Ing. Marcello Montanari - Sistemi e Tecnologie per l'Automazione Azionamenti Elettrici 3 120
Dimensionamento dell'azionamentoSintesi su Bassa inerzia e velocità massima
Tabella riassuntiva dei criteri di utilizzo di motori a bassa inerzia e/o alta velocità
+ significa riduzione di coppia ++ significa riduzione consistente+ o ++ significa scelta suggerita+ significa nessun ulteriore incremento significativo= significa nessun miglioramento
+=+Caso c) il motore è veloce
++=Caso b) il motore è lento
++=+Caso a) la velocità del motore è giusta
motore bassa inerziaalta velocità
motore alta velocità
inerzia standard
motore bassa inerzia
velocità standard

Sistemi e Tecnologie per l'Automazione
Dimensionamento di un azionamento per il controllo del moto
FINE
Laurea Specialistica in Ingegneria InformaticaLaurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni
Prof. A. Tonielli, Ing. A. Tilli, Ing. M. MontanariDEIS - Università di Bologna
Tel. 051-2093924E-mail: [email protected]
http://www-lar.deis.unibo.it/atilli


















