Sistemas con aceleración común.gtfis.azc.uam.mx/info/ApuntesFisI/V_NEWTON.pdf · pasa por la...
27
1 TEMAS DE FÍSICA I LEYES DE NEWTON Profr. Abelardo Rodríguez Soria et al TRIMESTRE 11‐P Sistemas con aceleración común. EJEMPLO 1. La máquina de Atwood. La máquina de Atwood consiste en una polea fija en su centro (lisa y no rotatoria). Una cuerda pasa por la polea y remata en dos bloques de masas m 1 y m 2 , como se ve en la figura 1. Se trata de calcular la aceleración del sistema y la tensión en la cuerda, una vez que se liberan los bloques. ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Figura 1 Figura 2 Primer paso. Diagramas de cuerpo libre. En la figura 2 se muestra el DCL de cada bloque. Advierta que existe una sola cuerda y por tanto una sola tensión, dado que la polea es lisa. Segundo paso. Ejes de coordenadas y referencia temporal. Se puede adoptar un sistema de ejes X, Y distinto para cada bloque. En este caso, como todas las fuerzas están verticales, solamente es necesario un solo eje para cada bloque, que designaremos “Eje X”. Figura 3
-
Upload
vuonghuong -
Category
Documents
-
view
214 -
download
0
Transcript of Sistemas con aceleración común.gtfis.azc.uam.mx/info/ApuntesFisI/V_NEWTON.pdf · pasa por la...

1
TEMAS DE FÍSICA I LEYES DE NEWTON
Profr. Abelardo Rodríguez Soria et al TRIMESTRE 11‐P Sistemas con aceleración común. EJEMPLO 1. La máquina de Atwood. La máquina de Atwood consiste en una polea fija en su centro (lisa y no rotatoria). Una cuerda pasa por la polea y remata en dos bloques de masas m1 y m2, como se ve en la figura 1. Se trata de calcular
la aceleración del sistema y la tensión en la cuerda, una vez que se liberan los bloques. ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Figura 1 Figura 2 Primer paso. Diagramas de cuerpo libre. En la figura 2 se muestra el DCL de cada bloque. Advierta que existe una sola cuerda y por tanto una sola tensión, dado que la polea es lisa. Segundo paso. Ejes de coordenadas y referencia temporal. Se puede adoptar un sistema de ejes X, Y distinto para cada bloque. En este caso, como todas las fuerzas están verticales, solamente es necesario un solo eje para cada bloque, que designaremos “Eje X”.
Figura 3

2 xisten
os escoger arbitrariamente una de las opciones. Supondremos que m2 está acelerado
acia ab
para cada bloque en el sentido de su respectiva aceleración, tal como
rcer paso. Leyes de movimiento. a aplicar la 2a. ley de Newton a cada ue. La expresión matemática general de esta ley
es la siguiente:
E aquí dos opciones de movimiento: el bloque m2 puede estar acelerado hacia abajo o hacia arriba.
En estos casos podem
h ajo, y por tanto el bloque m1 estará acelerado hacia arriba.
Se recomienda trazar el Eje X envemos la figura 3.
En cuanto a la referencia temporal, supondremos que t ≡ 0 cuando se liberan los bloques. Te Vamos bloq
(i) x x
y y
F mam F ma
ì =ï= Þ í =ïî
åå åF a
En el presente problema los bloques se mueven con una misma magnitud de aceleración “a”, puesto que
extensible. Además, los vectores aceleración de cada bloque tienen solo componente X (se
ene ax = a, ay = 0). Entonces las ecuaciones (i) se reducen para este problema a una sola, a saber,
i) x a
la ec bloque:
Bloque 1. (iii) T – m1 g = m1 a
Bloque 2. (iv) m2 g – T = m2 a
la cuerda es in
ti
F m=å (i
Apliquemos uación (ii) a cada
Figura 4a Figura 4b Fíjese bien en el signo de la componente de cada fuerza. En particular, para el bloquehacia ajo son positivas, porque el eje X para este bloque está dirigido hacia abajo.
2 las fuerzas ab
T y a.
dinámicas. Este paso se explicará en otro ejemplo más adelante, donde sí se necesita.
Cuarto paso. Incógnitas y datos. Los datos del problema son m1, m2, y por supuesto, g. Las incógnitas son dos: Quinto paso. Relaciones cinemáticas y/o

3
resolver ya, pues tenemos un sistema (iii), (iv) de dos ecuaciones con dos cógnitas. Se recomienda “eliminar las tensiones”, lo cual podemos lograr sumando miembro a miembro
es
– m1 g + m2 g = m1 a + m2 a
i)
Sexto paso. Operaciones matemáticas. Podemos proceder a inestas ecuacion . Obtenemos (v)
de donde
2 1(v1 2m m+
( )m m ga
-=
valor de a en la ecuación (iii) obtenemos tensión:
Sustituyendo este la
2 11 1 1 1
( )m m gT m g m a m g m
m m-
= + = + ×+
1 2
ii)
o sea
1 22m mT g
m m= ×
+ (v
1 2
negativa. Esto significa
el bloque m1 hacia abajo).
os
bloques se moverían con velocidad constante. • Conforme se aumenta m2, manteniendo m1 constante, la aceleración tiende a la de la gravedad:
Observaciones.
• La solución (vi) nos dice que si m1 > m2, entonces la aceleración a resultasimplemente que los vectores aceleración mostrados en la figura 3 invierten sus direcciones (el bloque m2 estaría acelerado ahora hacia arriba,
• Por otra parte, si las masas son iguales (m1 = m2), la aceleración del sistema es cero: amb
( )121
2 2
m2
0 0
1lim lim
1
mm
mm m
ga g
® ®
-= =
+
iagramas, Ejes, Leyes, Incógnitas, Relaciones, Operaciones). Este acrónimo no nción es servir de recordatorio de los
distintos pasos del método.
y la tensión T tiende a cero. Los pasos del método que hemos utilizado aquí para resolver el problema forman el siguiente acrónimo: “D E L I R O” (Dviene sugerido por experiencias pasadas en el aula ☺. Su inte

4 EJEMPLO 2. EMPUJAR MEDIANTE FUERZA NORMAL. Se aplica una fuerza horizontal F a un sistema de dos bloques en contacto que se deslizan sobre una superficie horizontal lisa, como se muestra en la figura 5. (a) ¿Cuánto vale la aceleración de los bloques? (b) ¿Qué tipo de fuerza es la que acelera el bloque de masa m2 y cuánto vale dicha fuerza?
(c) ¿Qué fuerza total actúa sobre el bloque m1?
Tome F = 40 N, m1 = 16 kg, m2 = 8 kg.
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Primer paso. Diagramas de cuerpo libre. El bloque izquierdo tiene contacto con el agente que aplica la fuerza F, con el bloque derecho, y con la superficie horizontal. Estos cuerpos ejercen
Figura 5
sobre él las fuerzas F, la fuerza normal N y la fuerza normal N1, respectivamente.
Figura 6
En cuanto al bloque derecho, éste tiene contacto con el bloque izquierdo y con la superficie horizontal, cuerpos que le ejercen las fuerzas N y N2, respectivamente. Los DCL’s de los bloques están en la figura 6.
Segundo paso. Ejes y referencia temporal. Obviamente, ambos cuerpos se van a mover con la misma aceleración “a”, que apunta hacia la derecha. Por tanto, escogemos los ejes X y Y para cada cuerpo como vemos en la figura 6, con el Eje X en ambos casos hacia la derecha, en el sentido de la aceleración común. Tercer Paso. Leyes de movimiento. El movimiento de cada bloque obedece las ecuaciones . , 0x yF ma F= =å å(La segunda se justifica por que la aceleración no posee componente Y). He aquí las ecuaciones Bloque izquierdo Bloque derecho En X: F – N = m1 a N = m2 a En Y: N1 – m1 g = 0 N2 – m2 g = 0

5 Cuarto paso. Incógnitas y datos. Los datos son F, m1, m2, g. Las incógnitas son N, a, N1 y N2.
Quinto paso. Relaciones cinemáticas y/o dinámicas. Ambos bloques se mueven con la misma aceleración a. Ya tomamos esto en cuenta. Sexto paso. Operaciones matemáticas. Eliminando la normal N de las ecuaciones que contienen la aceleración a, obtenemos
2
48 N m216 kg 8 kg s
Fam m
= = =+ +1 2
La normal N resulta igual a
2 2N
m8 kg 2 16N m a= = × =s
(Favor de no confundir la N de fuerza normal con la N de la unidad newton).
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Otro modo de resolver este problema es el siguiente: En primer lugar, notemos que ambos bloques se mueven juntos con la misma aceleración. De hecho se comportan como si fuesen una sóla partícula de masa igual a M = 16 kg + 8 kg = 24 kg. Sobre esta partícula actúa una fuerza F = 48 N, de tal manera que la aceleración común de los bloques vale
248N m224kg s
Fa =M
= =
Figura 7
Apliquemos ahora la segunda ley “Fuerza = Masa × Aceleración” al bloque derecho. La fuerza que lo empuja hacia la derecha es puramente la normal N. Entonces
2
Nm8kg 2 16N = × =s
Esta misma fuerza normal N actúa sobre el bloque izquierdo hacia la izquierda. Sumándola algebraicamente con la fuerza de 48 N sobre dicho bloque tenemos que la fuerza total sobre él es 48 N – 16 N = 32 N. Dado que la masa del bloque izquierdoes de 16 kg, su aceleración resulta de 32 N/ 16 kg = 2 m/s2, como debía.

6 EJEMPLO 3. JALAR MEDIANTE FRICCIÓN. Un bloque de masa m1 = 4 kg descansa sobre otro mayor
de masa m2 = 10 kg, que puede deslizarse a lo largo de una mesa horizontal lisa. Existe fricción entre
ambos bloques, con coeficiente de fricción estático μ = 0.5. Se desea comunicar al conjunto de los dos bloques una aceleración de a = 0.8 m/s2, jalando horizontalmente con un cable el bloque superior con cierta fuerza F. ¿Cuánto debe valer esta fuerza? ¿Es posible esta situación?
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ Discutamos el movimiento. La única fuerza horizontal sobre el bloque inferior es la fuerza de fricción debida al bloque superior, la cual actúa hacia la derecha
Figura 8
sobre este bloque, impulsándolo a lo largo de la superficie horizontal. Para que ambos bloques se muevan juntos con la misma aceleración, es menester que tal fuerza de fricción sea suficiente para producir una aceleración de 0.8 m/s2 (o sea que la fuerza de fricción logre esto sin rebasar su valor máximo permitido). La figura 9a muestra el DCL de ambos bloques, y las figuras 9b,c muestran respectivamente los DCL’s del bloque superior y del bloque inferior.
Figura 9a Figura 9b Figura 9c
Refiriéndonos al DCL de la figura 9a, la fuerza F necesaria para producir una aceleración común
de 0.8 m/s2 en ambos bloques (o sea suponiendo que ambos bloques se muevan juntos como si fuesen un solo bloque de masa 14 kg) es F = masa × aceleración = 14 × 0.8 = 11.2 (N) Por otra parte, del DCL de la figura 9b se deduce que para que el bloque superior tenga una aceleración de 0.8 m/s2, debemos tener F – f1 = m1 a 11.2 – f1 = 4 × 0.8 ⇒ f1 = 8 N
¿Es esto posible? Lo será si la fricción necesaria, f1, no excede la fricción máxima fmáx permitida, la cual
vale
fmáx = μ N1 = μ m1 g = 0.5 × 4 × 9.8 = 19.6 (N)
Como f1 = 8 < fmáx = 19.6, el movimiento conjunto de los bloques sí es posible con la aceleración dada.

7 EJEMPLO 4. Para el conjunto mostrado en la figura, calcular la aceleración común de los bloques y las fuerzas desconocidas. Los bloques m1 y m2 están en contacto simple.
Suponer superficies lisas. La cuerda atada a los bloques m1 y m3 pasa por una polea lisa
y fija. Suponer que el bloque m3 está
acelerado verticalmente hacia abajo.
Figura 10
Paso # 1. Diagramas de cuerpo libre de los bloques Éstos se muestran en las figuras 11a,b,c para los bloques m1, m2 y m3, respectivamente.
Figura 11a Figura 11b Figura 11c Fuerzas sobre el bloque m1, debidas a: la Tierra (W1), Cuerda (T), Bloque m2 (N2), Plano inclinado (N1).
Fuerzas sobre el bloque m2, debidas a: la Tierra (W2), Bloque m1 (N2), Plano inclinado (N3).
Fuerzas sobre el bloque m3 , debidas a: la Tierra (W3), Cuerda (T).
Advierta que el ángulo θ del plano inclinado es el mismo que el que forman el peso W1 y la
normal N1 en el DCL de la figura 11a, así como el que forman W2 y N3 en el DCL de la figura 11b.
Paso #2. Escoger un sistema de ejes X‐Y para cada cuerpo. Por hipótesis el bloque m3 está acelerado hacia abajo, y por tanto los bloques m1 y m2 lo están
hacia arriba del plano inclinado. Esto determinará nuestra elección de ejes, como sigue: Para los bloques m1 y m2 escogemos un Eje X a lo largo del plano inclinado, hacia arriba, y un Eje
Y perpendicular. Para el bloque m3 es necesario sólo un Eje X, que dirigimos hacia abajo.
Así, para cada bloque el Eje X se dirige en el sentido de la aceleración supuesta para el mismo. Paso #3. Plantear las ecuaciones de movimiento para cada bloque. He aquí las ecuaciones de movimiento de los bloques: Bloque 1: (1) T – N2 – W1 sen θ = m1 a (2) N1 – W1 cos θ = 0

8 Bloque 2: (3) N2 – W2 sen θ = m2 a (4) N3 – W2 cos θ = 0 Bloque 3: (5) W3 – T = m3 a Paso #4. Incógnitas y datos. En estas 5 ecuaciones tenemos 5 incógnitas, a saber T, N2, a, N1, y N3.
Paso #5. Relaciones cinemáticas y/o dinámicas. Ya hemos tomado en cuenta al plantear las ecuaciones que todos los bloques tienen la misma aceleración “a” (a1 = a2 = a3 ≡ a). Paso #6. Operaciones matemáticas. Para resolver eliminamos la tensión T de las ecuaciones (1) y (5), sumándolas miembro a miembro:
– N2 – m1 g sen θ + m3 g = m1 a + m3 a
Sustituyendo aquí N2, despejada de (3) obtenemos
– m2 g sen θ – m2 a – m1 g sen θ + m3 g = m1 a + m3 a
Despejando la aceleración,
3 1 2sen sen
(m m )sen )+ θf3 2 1m ‐m θ ‐m θa = × g (m
m +m +m1 2 3
Las demás incógnitas se calculan fácilmente a partir de “a”. EJEMPLO 5. Una locomotora de masa 20 Mg (megagramos) jala 4 vagones de masa 8 Mg cada uno. La
aceleración del tren en cierto momento es de 0.52 m/s2. Calcular en ese momento la fuerza de acoplamiento entre la locomotora y el primer vagón y entre los demás vagones. Despreciar la fricción.
Figura 12

9 Denotemos los acoplamientos con “a”, “b”, “c” y “d”, tal como vemos en la figura 12. Definamos un sistema que conste de los 4 vagones. Su DCL se muestra en la figura 13.
Figura 13
La masa de este sistema es 4 × 8 Mg = 32 Mg. Dado que la única fuerza horizontal (en X) es F1, la segunda ley de Newton da
F1 = masa × aceleración = 32 Mg × 0.52 m/s2 = 16.64 kN
Análogamente, el acoplamiento “b” jala los 3 últimos vagones con una fuerza F2 dada por
F2 = masa × aceleración = 24 Mg × 0.52 m/s2 = 12.48 kN
El acoplamiento “c” jala los 2 últimos vagones con una fuerza F3 dada por
F3 = masa × aceleración = 16 Mg × 0.52 m/s2 = 8.32 kN
Finalmente, la fuerza que jala el último vagón es F4 = masa × aceleración = 8 Mg × 0.52 m/s2 = 4.16 kN
A continuación mostramos las fuerzas horizontales sobre los tres últimos vagones (figura 14a) y sobre el penúltimo vagón (figura 14b). En cada caso se calcula la aceleración (que debe dar 0.52 m/s2) usando unidades de meganewton y megagramos.
a = 12.48/24 = 0.52
a = (8.32 – 4.16)/8 = 0.52
Figura 14a Figura 14b Note que las Figs. 14a,b no son diagramas de cuerpo libre, porque no muestran todas las fuerzas que actúan sobre los vagones mostrados en cada caso. En ellas se muestran solamente las fuerzas horizontales.

10 Sistemas con polea móvil y relación cinemática aB = 2 aP. Mire los sistemas ilustrados en la figura 15. En todos ellos existe una polea móvil (denominada “P”), sobre la que corre un cable. Uno de los extremos de este cable está fijo (el extremo “F”), y el otro extremo remata en un bloque (el extremo “B”).
(a)
(b)
(c)
(d)
Figura 15
En cada uno de estos sistemas, las aceleraciones de los bloques no son las mismas. De hecho, el bloque B tiene el doble de aceleración que la polea móvil P, como demostraremos a continuación. Consideremos la situación mostrada en la figura 16, que engloba todos los casos de la figura 15.
Figura 16

11 Como la cuerda es inextensible, la suma de las longitudes de los tramos de cuerda a uno y otro lado de la polea móvil permanece constante. Entonces, xP + (xP – xB) = constante, o sea 2xP – xB = constante. Derivando con respecto al tiempo tenemos 2vP – vB = 0. Volviendo a derivar, aB = 2 aP Esta es la relación cinemática que emplearemos en esta sección de ejemplos. EJEMPLO 6. Resolvamos el sistema de la figura 17. Existe fricción entre los bloques y los planos
inclinados, de coeficiente cinético común μc. Se desprecia la masa de la polea móvil.
Figura 17 Hipótesis. Polea ingrávida. Bloque m2 acelerado hacia abajo. Diagramas de cuerpo libre.
Figura 18
Como el bloque 2 baja, las fuerzas de fricción actúan como vemos en los DCL’s de la figura 18. Ejes de referencia. El eje X se coloca para cada bloque en el mismo sentido que su aceleración. Leyes de movimiento. Las ecuaciones de movimiento de los bloques son: Bloque 1
(r1) T – fc1 – m1 g sen α = m1 a1
(r2) N1 – m1 g cos α = 0

12 Bloque 2
(r3) – 2T – fc2 + m2 g sen β = m2 a2
(r4) N2 – m2 g cos β = 0 Incógnitas y datos.
En las ecuaciones anteriores aparecen las incógnitas T, fc1, a1, N1, fc2, a2 y N2, siete en total. Nos
faltan 3 ecuaciones, que obtendremos en el siguiente paso. Relaciones cinemáticas y/o dinámicas. De acuerdo con lo discutido en la página precedente, existe la condición cinemática (r5) a1 = 2 a2 Además, en vista de que existe deslizamiento,
(r6) fc1 = μc N1
(r7) fc2 = μc N2
Operaciones matemáticas. Empecemos por eliminar la tensión T, multiplicando la ecuación (r1) por 2 y sumándola con la (r1). Luego sustituyamos las fricciones por sus expresiones dadas en (r6) y (r7). Despejemos las normales de las ecuaciones (r2) y (r4). Finalmente usemos la relación (r5). Llegaremos a
1 21
2 (sen cos ) (sen cos4
c cm g m ga
m m- a +m a + b - m
=+1 2
)b

13 EJEMPLO 7. Un vagón de ferrocarril viaja en línea recta con aceleración constante a. Del techo del vagón cuelga una bola de masa m atada a un hilo, como vemos en la figura 19. ¿Qué ángulo θ forma el hilo con la vertical para una aceleración dada?
Figura 19 ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Observe el DCL de la bola y nuestra elección de ejes en la figura 20.
Figura 20
Aplicando las ecuaciones
∑Fx = max ∑Fy = may
y notando que las componentes de la aceleración son ax = a y ay = 0, obtenemos las relaciones
(r1) T sen θ = ma (ya que ax = a)
(r2) T cos θ – mg = 0 (ya que ay = 0) Eliminemos la tensión T de las ecuaciones (r1) y (r2), dividiéndolas miembro a miembro:
⇒ (r3) a = g tan θ mgm
cosTTsen a
=θθ
A mayor aceleración, mayor es el ángulo de inclinación del hilo. Cuando la aceleración tiende a infinito, dicho ángulo tiende a 90°, que correspondería a la posición horizontal del hilo. El conjunto {hilo + bola} sirve como “acelerómetro”. Una persona que viaje en el vagón puede obtener la aceleración midiendo el ángulo θ. En particular tenemos que si el ángulo vale 45°, entonces la aceleración es a = g. Si θ = 0, el movimiento del vagón es uniforme.

14 CalcuT U
c
H D
T sen θ = ma ulemos la ten
Usando sen2
(r4)
EJEMPLO 8.
cinético μc y
Hipótesis. El sisLa ac
Diagramas dObser
y T cos θ = msión en funcióón de la aceleeración. De las ecuaciones (r1) y (r2), o ssea mg tenemos
T2 sen2 θ ++ T2 cos2 θ = (mma)2 + (mg)2
θ + cos2 θ = 1 hallamos
2T m a= 2g+
En el sistem
entre el bloqu
ma mostrado e
ue 2 y la mesa
en la figura 21
a, de coeficien
1 existe fricci
nte cinético μión entre el bl
μc’. Calcular laloque 1 y el 2
a aceleración
2, de coeficien
del sistema.
nte
stema está aceceleración del
e cuerpo librerve en la figura
elerado (podrl bloque m3 es
e. a 22 el DCL de
Figu‐‐‐‐‐‐‐‐‐‐‐‐‐
ría estar inmóstá obviamen
e cada bloque.
Figu
ura 21 ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
óvil; ¿por qué?nte hacia abajo
ura 22
?) o.

15 Ejes y referencia de tiempo. El sistema se mueve de tal manera que el bloque 3 desciende. Por lo tanto, el eje X para este bloque se escogió hacia abajo. Por otra parte, el bloque 2 se mueve hacia la derecha y el bloque 1 hacia la izquierda. En tales direcciones se toman sus respectivos ejes X. Leyes de movimiento. Bloque 1
(r1) T1 – fc1 = m1 a (r2) N1 – m1 g = 0 Bloque 2
(r3) – T1 – fc1 – fc2 + T2 = m2 a
(r4) – N1 – m2 g + N2 = 0
Bloque 3
(r5) m3 g – T2 = m3 a
Favor de observar que en el caso del bloque 1, que se mueve hacia la izquierda, el eje X apunta
hacia la izquierda por lo que T1 es positiva y fc1 negativa. Análogamente, sobre el bloque 3 el peso m3g es
positivo y la tensión T2 negativa. Incógnitas y datos.
Tenemos 7 incógnitas, T1, fc1, a, N1, T2, fc2 y N2, y 5 ecuaciones. Las dos ecuaciones faltantes
provienen del siguiente paso. Relaciones cinemáticas y/o dinámicas. En el presente problema ya hemos tomado en cuenta que todos los bloques poseen la misma aceleración “a” (o sea a1 = a2 = a3 ≡ a). Las “relaciones dinámicas” se refieren a fuerzas. En el problema presente existen dos relaciones dinámicas, que expresan que las fricciones son las máximas, puesto que existe deslizamiento:
(r6) fc1 = μc N1
(r7) fc2 = μc′ N2
Estas dos ecuaciones complementan las 5 anteriores, por lo que ya podemos resolver.

16 Operaciones matemáticas. Eliminemos las tensiones, sumando miembro a miembro las ecuaciones que las contienen. Obtenemos la ecuación
(r8) – 2 fc1 – fc2 + m3 g = m1 a + m2 a + m3 a Ahora bien, las fuerzas normales son N1 = m1 g
N2 = (m1 + m2) g
y las fricciones,
fc1 = μc N1 = μc m1 g
fc2 = μc’ N2 = μc′ (m1 + m2) g
Sustituyéndolas en la ecuación (r8) resulta
(r9) c 1 c 1 2 32 m g (m m )g m gm m m
a′− μ − μ + +
=+ +1 2 3
Ya conociendo la aceleración, las demás incógnitas se encuentran fácilmente. Análisis de la solución. Remitiéndonos a la figura 21:
Según nuestra intuición, si m1 es muy pesado y el coeficiente de fricción μc (o bien μc′) muy
grande, es posible que el sistema no se mueva. ¿Cuál sería la condición para que el sistema se mueva aceleradamente? Veamos. De (r9), la condición a > 0 equivale a la condición
(r10) m3 g > 2μc m1 g + μc′ (m1 + m2) g Sin embargo, el sistema debe vencer la fricción estática para poderse mover, por lo que (r10) no es correcta, sino que debe sustituirse por esta otra: (r11) m3 g > 2 μ m1 g + μ′ (m1 + m2) g en la que figuran los coeficientes de fricción estática μ y μ′. El miembro derecho de (r11) es mayor que el correspondiente de (r10) (los coeficientes de fricción cinética son grosso modo un 25% menores que los de fricción estática). Nota. Si la desigualdad “>” en (r11) se cambia por una igualdad, el sistema está en equilibrio, y su movimiento es inminente.
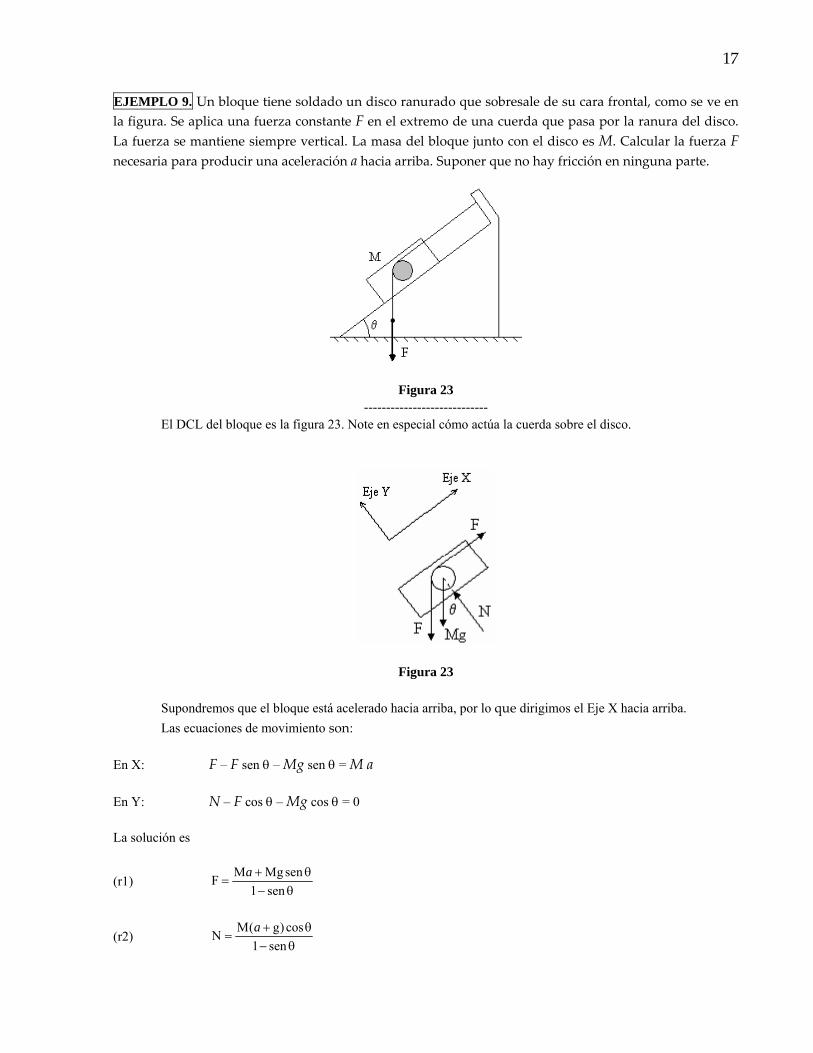
17 EJEMPLO 9. Un bloque tiene soldado un disco ranurado que sobresale de su cara frontal, como se ve en la figura. Se aplica una fuerza constante F en el extremo de una cuerda que pasa por la ranura del disco. La fuerza se mantiene siempre vertical. La masa del bloque junto con el disco es M. Calcular la fuerza F necesaria para producir una aceleración a hacia arriba. Suponer que no hay fricción en ninguna parte.
Figura 23 ----------------------------
El DCL del bloque es la figura 23. Note en especial cómo actúa la cuerda sobre el disco.
Figura 23 Supondremos que el bloque está acelerado hacia arriba, por lo que dirigimos el Eje X hacia arriba. Las ecuaciones de movimiento son: En X: F – F sen θ – Mg sen θ = M a En Y: N – F cos θ – Mg cos θ = 0 La solución es
(r1) M Mg senF a + θ
=1 sen− θ
(r2) M( g) cosN a + θ
=1 sen− θ

18 (Nota. En función de la fuerza F la aceleración y la normal son:
(r3) F(1 sen ) M senga − θ − θ=
M (r4) N = (F + Mg) cos θ ) Análisis de la solución. Cuando θ → 90° la fuerza F tiende a infinito, lo mismo que la fuerza normal N, ya que
90 90
cos senlim lim1 sen cosθ→ ° θ→ °
θ − θ⎛ ⎞⎜ ⎟
⎛ ⎞= = ∞⎜ ⎟− θ − θ⎝ ⎠ ⎝ ⎠ (Se derivó con respecto a θ el numerador y el denominador.) Se requiere cada vez mayor fuerza para acelerar al conjunto conforme el ángulo del plano es cada vez más grande. Cuando θ → 0° tenemos que F → Ma N → F + Mg como era de esperarse (Vea la figura 24).
Figura 24 De (r3) vemos que la fuerza tiene que cumplir la condición
Mg senF θ>
1 sen− θ para que el bloque esté acelerado hacia arriba (a > 0). Si esta condición no se cumple, el bloque está acelerado hacia abajo (a < 0).
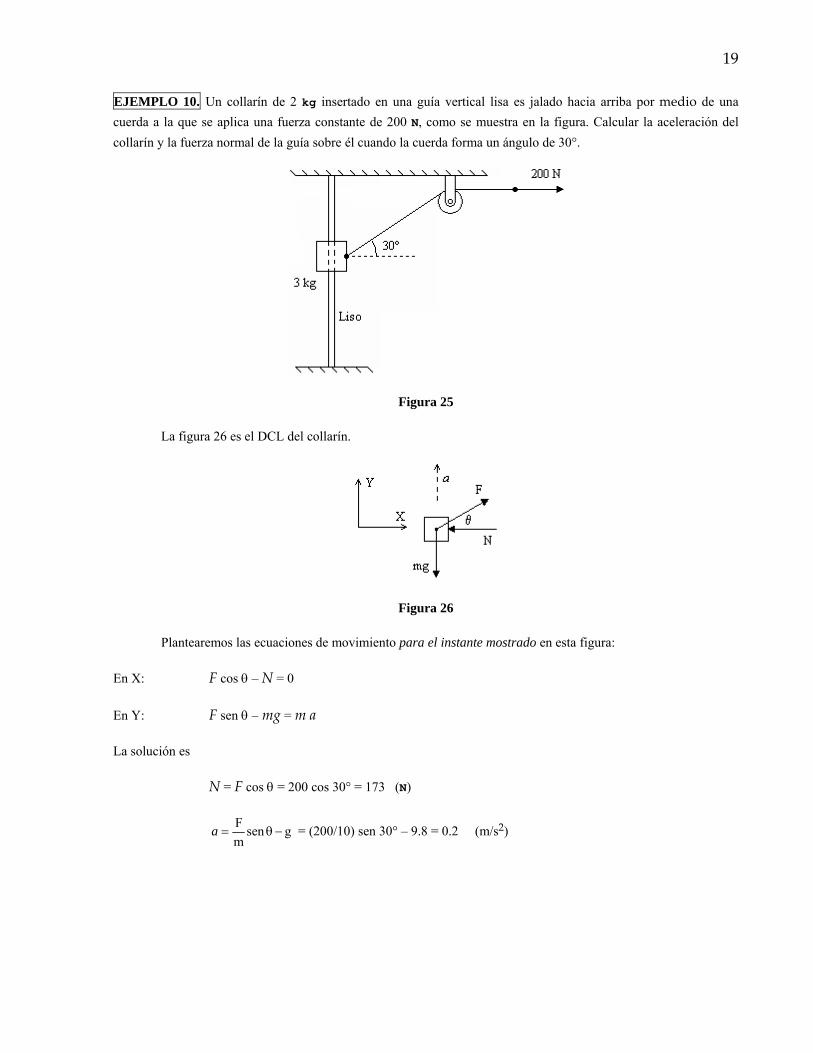
19 EJEMPLO 10. Un collarín de 2 kg insertado en una guía vertical lisa es jalado hacia arriba por medio de una cuerda a la que se aplica una fuerza constante de 200 N, como se muestra en la figura. Calcular la aceleración del collarín y la fuerza normal de la guía sobre él cuando la cuerda forma un ángulo de 30°.
Figura 25
La figura 26 es el DCL del collarín.
Figura 26
Plantearemos las ecuaciones de movimiento para el instante mostrado en esta figura: En X: F cos θ – N = 0 En Y: F sen θ – mg = m a La solución es N = F cos θ = 200 cos 30° = 173 (N)
00/10) sen 30° – 9.8 = 0.2 (m/s2) = (2F sen ga = θm
−

20 Problemas 1. Para el sistema mostrado, calcular las aceleraciones de los bloques y las tensiones en las cuerdas.
Resp. |a| = 0.143 g 2. Dos bloques están unidos por una barra de masa despreciable. Calcular la aceleración común de los bloques, así como la fuerza de compresión en la barra. Suponga superficies lisas.
Sugerencia. Para calcular la aceleración del sistema, haga el DCL del sistema {Bloque‐1, Barra, Bloque‐2}. Después haga el DCL del sistema {Bloque‐2} para calcular la fuerza debida a la barra. Resp. a = 10 m/s2; K = 70 N. 3. Un bloque de masa m1 = 6 kg descansa sobre otro mayor de masa m2 = 18 kg, que puede deslizarse a lo
largo de una mesa horizontal lisa. Existe fricción entre ambos bloques, con coeficiente de fricción estático μ = 0.4. ¿Cuál es la máxima fuerza F que puede aplicarse horizontalmente sobre el bloque superior de tal modo que ambos bloques se muevan como uno sólo, con una misma aceleración? ¿Cuánto valdría esta aceleración común? ¿Qué parámetro(s) cambiaría Ud para lograr que esta aceleración fuera mayor?
Resp. F = 23.52 N; a = 0.98 m/s2

21 4. Un tren tiene una locomotora de 40 Mg de masa (1 megagramo = 106 g = 103 kg), que jala cuatro vagones de masas iguales de 10 Mg. Calcular las fuerzas en los acoplamientos de la locomotora con el primer vagón, y en los de vagón con vagón, suponiendo que el tren rueda con aceleración de 1 m/s2. Resp. 40, 30, 20 y 10 MN (meganewton). 5. Tres bloques, de masas 2, 8 y 5 kg, son empujados por una fuerza de 45 N, como se muestra en la figura. Intente calcular mentalmente la aceleración común del conjunto, así como las fuerzas de contacto entre los bloques. No hay fricción en ningún lado. Resuelva de nuevo el problema “a pie”, haciendo los DCL’s de cada bloque y trabajando con valores paramétricos m1, m2, m3 para las masas y para la fuerza aplicada.
Resp. 3 m/s2; 39 N; 15 N. 6. Una caja de masa 50 kg es transportada en un camión. En cierto momento el camión aplica los frenos de modo que su desaceleración es constante, de magnitud 6 m/s2. El coeficiente de fricción estática entre la caja y la plataforma del camión es suficiente para que la caja no resbale.
Fig. E2 ¿Qué tipo de fuerza es la que desacelera la caja, y cuánto vale? Calcular el coeficiente de fricción suponiendo que la caja está a punto de resbalar durante el frenado. 7. Se comunica al sistema de dos bloques una aceleración de 2 m/s2. ¿Cuál es el mínimo valor del coeficiente de fricción estática entre los bloques para que no haya deslizamiento del bloque superior?
Note que no se requiere la masa del bloque inferior. Resp. μ = 0.2. 8. Se empuja un bloque de 35 kg con una fuerza de 150 N, como se muestra en la figura. Sobre este bloque descansa otro bloque de 15 kg. El conjunto se mueve sobre una superficie lisa, sin que el bloque de arriba se deslice. Calcular la fuerza de fricción estática entre ambos bloques. ¿Puede calcular el coeficiente de fricción con estos datos?
222
R 9c
f R
a
R
m
R
Resp. 45 N; N
9. Una persocontacto pers“a”? Sugeren
¿Cuánto valefuerza de con
Resp. N = m (
10. Hallar las
acelerado hac
Resp.
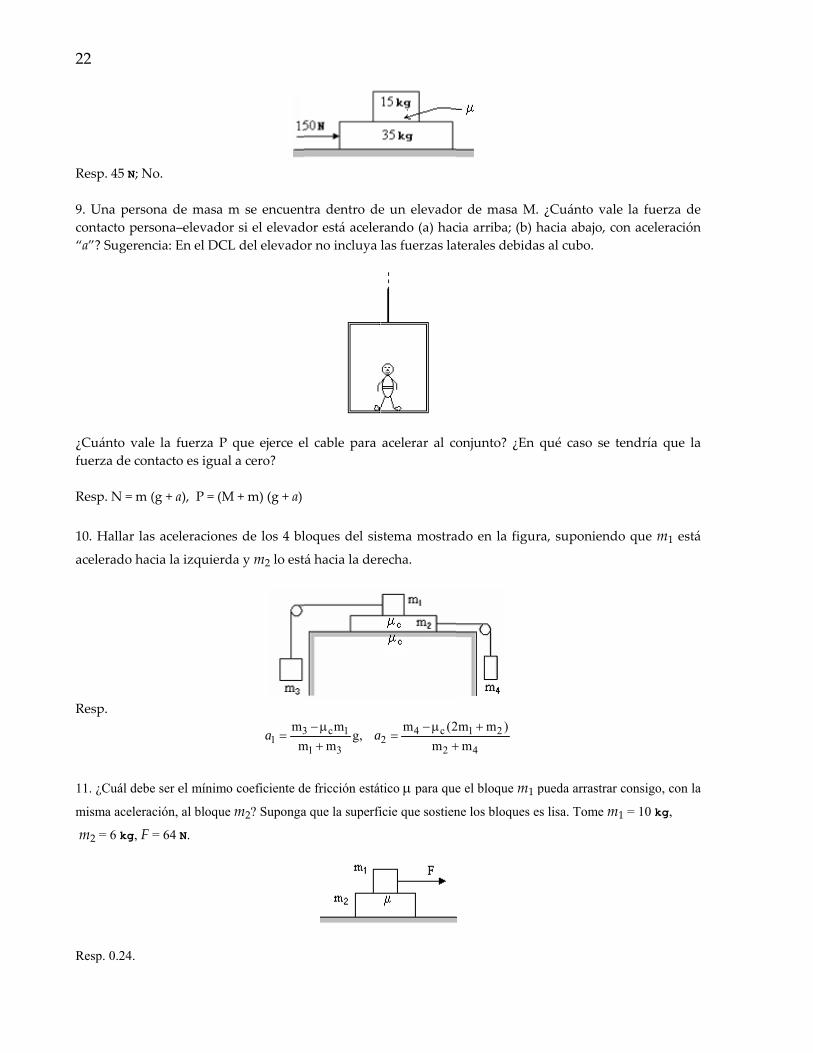
11. ¿Cuál debe
misma acelera
m2 = 6 kg, F
Resp. 0.24.
o.
ona de masa sona–elevadocia: En el DCL
e la fuerza P ntacto es igua
(g + a), P = (M
s aceleracione
cia la izquierd
e ser el mínimo
ción, al bloque
= 64 N.
m se encuenor si el elevadL del elevado
que ejerce el a cero?
M + m) (g + a)
es de los 4 bl
da y m2 lo est
o coeficiente d
e m2? Suponga
31
mm
a =
ntra dentro dedor está aceleror no incluya
el cable para
loques del sis
tá hacia la der
de fricción estát
a que la superfi
3 c 1
1 3
mg,
m ma
− μ+
e un elevadorando (a) haclas fuerzas la
acelerar al co
stema mostra
recha.
or de masa Mcia arriba; (b) aterales debid
tico μ para que
icie que sostien
4 c2
2
m (2m
a− μ
=+
onjunto? ¿En
ado en la figu
M. ¿Cuánto vahacia abajo, as al cubo.
ale la fuerza con aceleraci
de ión
n qué caso see tendría quee la
ura, suponienndo que m1 está
2 1 2
4
m m )m
++
e el bloque m1
ne los bloques 1 pueda arrastra
es lisa. Tome mar consigo, con
m1 = 10 kg,
n la

23 12. Dos vagones con las masas indicadas se mueven hacia la derecha. Cada vagón tiene un sistema de frenos, los cuales se aplican simultáneamente, generándose una fuerza de frenado de 50 kN sobre cada vagón. ¿Cuánto vale la fuerza en el acoplamiento durante la desaceleración? ¿Es de tensión o de compresión? Repetir el problema intercambiando las masas de los vagones.
Resp. 10 kN (tensión). 10 kN (compresión). 13. Un cilindro de masa M descansa sobre dos superficies a ángulo recto como se muestra en la figura. No existe fricción en ninguna parte. ¿Para qué valor de la aceleración el cilindro está a punto de rodar hacia la izquierda?
Resp. g tan θ. 14. Se aplica una fuerza constante F como se muestra en las figuras abajo. Las poleas son ideales y las superficies lisas. ¿Puede dar la aceleración del sistema en cada caso, sin necesidad de plantear las ecuaciones con detalle?
Resp. 4.2 m/s, 14 m/s.

24 15. Se aplica una fuerza F sobre una polea ligera y lisa, como se muestra en la figura. Calcular el valor máximo de F tal que el bloque M no se mueva, y la aceleración consiguiente del bloque m. Tomando F igual al doble de este valor máximo calcular las aceleraciones de los bloques.
Resp. F = 2Mg, (M m)ga −=
m 16. Para el sistema mostrado en la figura, calcular las aceleraciones de los bloques y la tensión de la cuerda. No hay fricción entre el bloque y el plano inclinado.
Resp. a = 5.9 m/s2. 17. Suponiendo que todas las superficies son lisas, que la cuerda es inextensible y que la polea es lisa y de masa insignificante, calcular la aceleración del bloque de masa M y la tensión de la cuerda.
Resp. mgM+2m
a =

25 18. Sobre el carrito actúa una fuerza que le produce una aceleración “a”. En cierto momento se rompe la cuerda. Existe fricción entre el bloque de masa m y el carrito, de coeficiente estático μ. ¿Cuál es el mínimo valor de μ tal que el bloque no caiga?
Resp. g/a. 19. Calcule las aceleraciones de los bloques en el siguiente sistema. Suponga que la polea móvil no tiene masa y que no existe fricción en ninguna parte.
Sugerencia. El sistema contiene dos cuerdas, con tensiones que denotamos con T1 y T2. Al aplicar la
segunda ley de Newton a la polea móvil tenemos que T1 – 2 T2 = masa × aceleración = 0
ya que la masa es cero. Se sigue que T1 = 2 T2. Por otra parte, la aceleración de la polea móvil es la misma
que la del bloque m1.
Resp.
2 11
2m m seng
m 4m1 2
− α+
a = ⋅

26 20. En el sistema mostrado, la polea móvil tiene masa M. Ambas poleas son lisas y la cuerda es inextensible. Calcular las aceleraciones de los bloques.
21. En la figura, el collarín C se mueve a lo largo de la guía recta inclinada G, con aceleración constante a dirigida como se muestra. Existe fricción de coeficiente μ entre el bloque de masa m y su apoyo horizontal, soldado al collarín. ¿Qué valor máximo puede tener la aceleración sin que el bloque se deslice? Tome el Eje X en la misma dirección que la aceleración a.
Interprete la solución. Resp.
θμ−θ
μ=
sencosga
22.. Comparar las aceleraciones del bloque de masa m1 en los dos casos mostrados.
Resp. 2 22m 2m,
4m m m 4m1 2 1 2
g ga a= =
+ +

27 23. Un bloque acanalado de masa 8 kg se mueve verticalmente en una guía lisa, mediante una fuerza constante F aplicada como se muestra. Calcular el valor de F que imprime una aceleración de 2 m/s2 al bloque.
Resp. F = 111.3 N. 24. Calcular el mínimo valor de la fuerza F tal que el bloque m no resbale hacia abajo. Calcular también la fuerza normal sobre el bloque M, debida al piso. Hay fricción entre ambos bloques, de coeficiente μ.
Resp. m(m+M)gF= , N=(m+M)gμM
25. Resuelva el problema 12 con los bloques intercambiados (F aplicada sobre M, el bloque “m” haciendo contacto con la superficie derecha de M).
Resp. (m+M)gF=μ
26. El collarín C se mueve a lo largo de la guía recta inclinada G, con aceleración constante “a” dirigida como se muestra. Existe fricción de coeficiente estático μ entre el bloque de masa m y su apoyo horizontal, soldado al collarín. ¿Qué valor máximo puede tener la aceleración sin que el bloque se deslice? Compare con el resultado obtenido en el Ejercicio 12 de la página 31. ¿Puede explicar físicamente la diferencia?
Resp. a = μg /(cos θ + μ sen θ)