SINAMICS V80 定位系统介绍wxhye.com/uploads/soft/151211/1-151211105400.pdf软件实现——...
74
SINAMICS V80 定位系统介绍 定位系统介绍 定位系统介绍 定位系统介绍 April. 2011
Transcript of SINAMICS V80 定位系统介绍wxhye.com/uploads/soft/151211/1-151211105400.pdf软件实现——...

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍
April. 2011

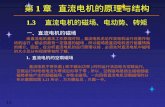
定位单元定位单元定位单元定位单元 钻孔单元钻孔单元钻孔单元钻孔单元 剪裁单元剪裁单元剪裁单元剪裁单元
可移动夹钳 (夹紧)回零位 (位置 „0“) 静止夹钳 (松开)
伺服电机
SINAMICS V80
SIMATIC S7-200
接近 开关
极限定参考点极限
SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍V80应用场合应用场合应用场合应用场合
缓行反向 正向
...处钻孔/剪裁
位

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍V80应用场合应用场合应用场合应用场合
包装
•色标定位
•定长送料
印刷
•旋转切刀的轮切
•喷墨机的滚动轴和喷墨头定位
•丝网印刷机的定位
数控雕刻
•坐标轴定位
电子
•自动涂胶机抓取机械手
•抓取机械手的阀控制
轮胎
•轮胎激光标线器

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍典型系统构成典型系统构成典型系统构成典型系统构成
4 5321 TD400C S7-200 CPU 224XP Servo MotorLOGO! Power SINAMICS V80
2 3
s
15
�PULS�SIGN�CLR�ON/OFF
�ALM�POS_OK�Phase Z
�S1 (LMT-)�S2 (RPS)�S3 (LMT+)
6 V80通讯电缆
4
6
((((选件选件选件选件))))

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍典型系统构成典型系统构成典型系统构成典型系统构成
54321 TD400C S7-200 CPU EM253LOGO! Power SINAMICS V80
2 3
s
16
�PULS�SIGN�CLR�ON/OFF
�POS_OK
�S1 (LMT-)�S2 (RPS)�S3 (LMT+)
6 Servo Motor
4
5
�ALM�Phase Z
7 V80通讯电缆
7((((选件选件选件选件))))

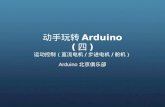
SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍典型系统构成典型系统构成典型系统构成典型系统构成
54321 MP 370 12” S7-300 CPU 315 2-DP FM353PS 307 5A Rail
2 3
1
6
�PULS�SIGN�CLR�ON/OFF
�S1 (LMT-)�S2 (RPS)�S3 (LMT+)
7 Servo Motor
4 5
8 V80通讯电缆
7
((((选件选件选件选件))))
�ALM�POS_OK�Phase Z
8
6 SINAMICS V80

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
与外围设备的连接与外围设备的连接与外围设备的连接与外围设备的连接
■■■■驱动器及配套伺服电机
■■■■SINAMICS V80动力进线回路配电元件
■■■■SIMATIC PLC与SINAMICS V80通讯电缆
■控制器

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
1FL4044-0AF21-0AB01FL4044-0AF21-0AA06SL3210-5CB13-7AA0750
1FL4033-0AF21-0AB01FL4033-0AF21-0AA06SL3210-5CB12-0AA0400
1FL4032-0AF21-0AB01FL4032-0AF21-0AA06SL3210-5CB11-1AA0200
1FL4021-0AF21-0AB01FL4021-0AF21-0AA06SL3210-5CB08-4AA0100
带抱闸不带抱闸
伺服电机SINAMICS V80驱动器额定 Pn (W)
驱动器及配套伺服电机订货号
SINAMICS V80动力进线回路配电元件型号
SIEMENSSchaffner EMC, Inc.SIEMENS推荐厂商
30A2mH,5A,200V3TF42 20-0XM0(16A)FN2070-16/073VU1340-0MM00(4A)750W
15A5mH,3A,200V3TF40 20-0XM0(9A)FN2070-10/03VU1340-0NK00(4A)400W
15A20mH,2A,200V3TF40 20-0XM0(9A)FN2070-6/073VU1340-0MJ00(4A)200W
15A45mH,1A,200V3TF40 20-0XM0(9A)FN2070-6/073VU1340-0MJ00(4A)100W
熔断器电抗器接触器电源滤波器断路器额定功率

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
●指令脉冲设置指令脉冲设置指令脉冲设置指令脉冲设置 (PULSE)必须在装置没有通电的情况下,来设定指令脉冲(出厂设置为0)。
●指令滤波设置指令滤波设置指令滤波设置指令滤波设置 (FIL)只有在机器震动时才需要改变此值(出厂设置为0)。

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
●指令脉冲指示 (REF)
●报警指示 (AL1 / AL2 / AL3)
*:当清除信号输入时黄色亮1s。

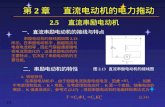
SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
V80的内部端子图
输入信号
输出信号
编码器
电机
直流24V抱闸

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
3米6ES7 298-2DR23-0XA0
规格订货号
SIMATIC SIMATIC SIMATIC SIMATIC PLCPLCPLCPLC与与与与SINAMICSSINAMICSSINAMICSSINAMICS V80V80V80V80通讯电缆
屏蔽线黄色Shield 定位完成褐+ 白POS_OK
输出信号ON时释放抱闸橙+ 白BK 驱动器报警蓝+ 白Alarm 零脉冲信号零绿+ 白Z_COM
输出编码器零脉冲(1个脉冲/转)绿色Z 外部24V电源零黑色M 外部24V电源正红色P24V
停止脉冲串并且清除剩余脉冲褐色CLR
方向信号蓝色SIGN 脉冲信号橙色PULS
源型/漏型(PNP/NPN)选择红+ 白P24V/M
描述线色信号
引脚说明
备注:1号针(P24V/M),如果选用的PLC
是源型(PNP)那么必须与M连接,如果选
用的PLC是漏型(NPN)那么必须与P24V连
接。

SINAMICS V80 定位系统介绍定位系统介绍定位系统介绍定位系统介绍部件介绍部件介绍部件介绍部件介绍
控制器类型控制器类型控制器类型控制器类型
S7-224XP CN
DC/DC/DC
或
S7-224XPsiCN
DC/DC/DC
S7-300 2DPS7-200
DC/DC/DC
EM253
(1~5个)
FM353
++
方案方案方案方案AAAA
方案方案方案方案BBBB
方案方案方案方案CCCC

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍如何接线如何接线如何接线如何接线

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍如何接线如何接线如何接线如何接线

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍如何接线如何接线如何接线如何接线

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍如何接线如何接线如何接线如何接线

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍
通过Q0.0和Q0.2或Q0.1和Q0.3输出脉冲串来控制SINAMICS V80实现轴定位功能。
■速度速度速度速度/位置点动位置点动位置点动位置点动
■■■■回机械原点回机械原点回机械原点回机械原点
■■■■执行相对定位执行相对定位执行相对定位执行相对定位
■■■■执行绝对坐标系下的绝对定位执行绝对坐标系下的绝对定位执行绝对坐标系下的绝对定位执行绝对坐标系下的绝对定位
■改变脉冲计数器的当前位置值改变脉冲计数器的当前位置值改变脉冲计数器的当前位置值改变脉冲计数器的当前位置值

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——JOG
JOG运行

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
回机械原点回机械原点回机械原点回机械原点寻找参考点的启动条件
1. Start_Dir=0, Final_Dir=0
搜寻方向向左搜寻方向向左搜寻方向向左搜寻方向向左, , , , 找到的位置在机械原点的左边沿找到的位置在机械原点的左边沿找到的位置在机械原点的左边沿找到的位置在机械原点的左边沿
如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面,,,,则分两种情况则分两种情况则分两种情况则分两种情况
情况一情况一情况一情况一

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
情况二情况二情况二情况二
如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面, 则有一种情况则有一种情况则有一种情况则有一种情况

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
2. Start_Dir=0, Final_Dir=1
搜寻方向向左搜寻方向向左搜寻方向向左搜寻方向向左, , , , 找到的位置在机械原点的右边沿找到的位置在机械原点的右边沿找到的位置在机械原点的右边沿找到的位置在机械原点的右边沿
如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面,,,,则有一种情况则有一种情况则有一种情况则有一种情况
如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面,,,,则分两种情况则分两种情况则分两种情况则分两种情况
情况一情况一情况一情况一

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
情况二情况二情况二情况二

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
3. Start_Dir=1, Final_Dir=0
搜寻方向向右搜寻方向向右搜寻方向向右搜寻方向向右, , , , 找到的位置在机械原点的左边沿找到的位置在机械原点的左边沿找到的位置在机械原点的左边沿找到的位置在机械原点的左边沿
如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面,,,,则有一种情况则有一种情况则有一种情况则有一种情况
如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面,,,,则分两种情况则分两种情况则分两种情况则分两种情况
情况一情况一情况一情况一

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
情况二情况二情况二情况二

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
4. Start_Dir=1, Final_Dir=1
搜寻方向向右搜寻方向向右搜寻方向向右搜寻方向向右, , , , 找到的位置在机械原点的找到的位置在机械原点的找到的位置在机械原点的找到的位置在机械原点的右右右右边沿边沿边沿边沿
如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面如果开始的位置位于机械原点的左面,,,,则有两种情况则有两种情况则有两种情况则有两种情况
情况一情况一情况一情况一
情况二情况二情况二情况二

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——Home
如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面如果开始的位置位于机械原点的右面, 则有一种情况则有一种情况则有一种情况则有一种情况

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——相对定位相对定位相对定位相对定位
实现相对定位方法:设法让电机轴以特定的频率和方向完成位置脉冲的个数。
注意: Velocity的值不要超出Num_Pulses;
减速完成定位的距离小于总长度的1/2。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——绝对定位绝对定位绝对定位绝对定位
实现绝对定位方法:通过计算脉冲数设法让电机轴以特定的频率转到特定的位置。
注意: Velocity的值不要超出|Position-C_Pos|;
减速完成定位的距离小于|Position-C_Pos|/2。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍功能介绍功能介绍功能介绍功能介绍——改变脉冲计数器的当前位置值改变脉冲计数器的当前位置值改变脉冲计数器的当前位置值改变脉冲计数器的当前位置值
改变脉冲计数器的当前位置值:将当前的实际位置设置成新的位置值。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——PLC S7-200控制控制控制控制V80
将“PULSE”拔码开关旋转8
注意:此操作要在伺服驱动器断电时完成。
完成SINAMICS V80驱动器和S7-200CPU接线。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
双击“PTO/PWM”弹出脉冲输出向导,指定一个脉冲发生器分配到Q0.0或Q0.1,选择其中一个,点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
选择“线性脉冲串输出(PTO)” ,再勾选下面的选择框。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
设定最高电机速度及电机的启动停止速
度。因为电机的额定转速为3000转/分,
即50转/秒,电机每转一圈需1000脉冲,
所以设定最高电机速度为电机额定转速
即50*1000=50000脉冲/秒,启动停止速
度取其10%即5000脉冲/秒。点击“下一
步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
设置加减速时间均为1000毫秒,即1秒。点击“下一步”。在接下来的“运动包络定义”对话框中点击“新包络”按钮。新建新包络曲线

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
可选择“单连续旋转”和“相对位置”两种操作模式。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
完成运动包络定义后点击“确认”按钮,配置分配存储区。点击“下一步”。在弹出对话框中点击“完成”,完成
向导配置。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
在完成向导配置后,增加如图所示子程序。可用这些子程序来编写程序完成定位应用。
首先,使能伺服驱动,对应的输出点置位即可;
其次,调用子程序PTOx_CTRL、PTOx_MAN、PTOx_RUN。
PTOx_ADV用来停止单速连续旋转操作模式的包络曲线运动,
PTOx_LDPO则用来改变PTO脉冲计数器的当前位置值。
要改变电机运转方向只需将SIGN信号对应的输出点置位即可。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——PLC S7-200控制控制控制控制V80
安装MAP SERV指令库
给库分配存储区
通过链接http://support.automation.siemens.com/WW/view/zh/26513850下载MAP SERV指令库

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现—— PLC S7-200控制控制控制控制V80
插入Q0_x_CTRL子程序
调用子程序Q0_x_MoveVelocity
调用子程序Q0_x_Stop

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——PLC S7-200控制控制控制控制V80
调用Q0_x_MoveRelative子程序
调用Q0_x_MoveAbsolute子程序
调用Q0_x_Home子程序
另外,还有Q0_x_LoadPos子程序,Scale_EU_Pulse子程序和Scale_Pulse_EU子
程序。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
完成SINAMICS V80驱动器和EM253接线。
双击“EM253位控”弹出EM253位控模块配置向导,第一步指定EM253位控模块位置,如紧联CPU模块则设为0,也可在连线状态下点击“读取模块”按钮来读取模块地址,点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
选择度量单位时选择“使用相对脉冲数”,再点击“高级选项”按钮,在弹出对话框中“输入有效电平”栏设置正向限位、反向限位、参考点、急停信号的有效电平。点击“确认”及“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
选择模块输入响应,在正向限位、反向限位动作时电机减速停止,在急停动作时电机立即停止,点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
设定最大、最小速度以及启动停止速度。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
设定电机点动速度。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
设定加减速时间。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
设定冲击补偿,点击“下一步”。在弹出界面中选择“配置参考点”,点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
设置参考点寻找速度及寻找方向。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
选择参考点搜索顺序。共有5种选择,可在配置完成后修改配置选择不同搜索顺序来观察寻参过程的变化。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
选择命令字节。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
设置运动包络定义。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
“绝对位置”、“相对位置”、“单速连续旋转”、“双速连续旋转”四种包络操作模式可生成不同运动曲线。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
为模块配置分配存储区。点击“下一步”。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
点击“完成”结束EM253位控模块配置。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
在向导指引下完成EM253位控模块配置后向STEP7 Micro/WIN中添加子程序。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
调用EM253定位子程序实现定位时要先调用子程序POSx_DIS使能伺服驱动器、POSx_CTRL使能位控功能。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
调用EM253定位子程序实现定位时要先调用子程序POSx_DIS使能伺服驱动器、POSx_CTRL使能位控功能。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——EM253控制控制控制控制V80
调用POSx_MAN子程序实现手动控制电机旋转,调用POSx_RSEEK寻参,调用POSx_GOTO绝对运动到指定位置。

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
完成SINAMICS V80驱动器S7-300M和FM353接线。
硬件组态
点击“Parameter…”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
点击“Machine data”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
输入“驱动参数”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
输入“驱动参数”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
输入“驱动参数”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
输入“驱动参数”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
传输“数据块”

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
点击“TEST”中 “Startup”
在Startup操作面板上测试V80

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
利用STEP7 V5.4 进行编程

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
运行程序,通过变量表发使能指令

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——S7-300&FM353
变量表的信息

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍软件实现软件实现软件实现软件实现——小结小结小结小结
对以上四种软件实现定位的方法进行比较
PTO模式 MAP_SERV库函数 EM253 FM353转矩 Max. Max. Max. Max.
转速 Max. Max. Max. Max.
相对运动 Yes Yes Yes Yes
绝对运动 No Yes Yes Yes
寻参 No Yes Yes Yes
S曲线 No No Yes No
工程单位转换 No Yes Yes Yes
限位开关 PLC Yes Yes PLC
急停开关 PLC PLC Yes PLC
零点信号 PLC PLC Yes Yes
向导支持 Yes No Yes Yes

SINAMICS V80 定位产品介绍定位产品介绍定位产品介绍定位产品介绍推荐文档资料推荐文档资料推荐文档资料推荐文档资料
为了使大家掌握V80使用, 最后向大家推荐以下手册
1. MAP_SERV_ev1.8.pdf
2. V80操作手册
3. 用S7-200和SINAMICS V80实现点到点的位置控制
4. SINAMICS V80,SINAMICS V60样本.pdf

Thank You
April 2011