“Carlo Alberto Dalla Chiesa” · Dirigente Scolastico dell’I.T. “Carlo Alberto Dalla Chiesa ...
Upload
vuongduongCategory
view
222download
0
www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics
Manuale dell’operatore
Simrad AP50 Autopilota
Italiano Sw.1.3

Manuale dell’operatore
SIMRAD AP50 Autopilota
20221149/E Sw. 1.3 Italiano
Simrad AP50 Autopilot
ii 20221149 / E
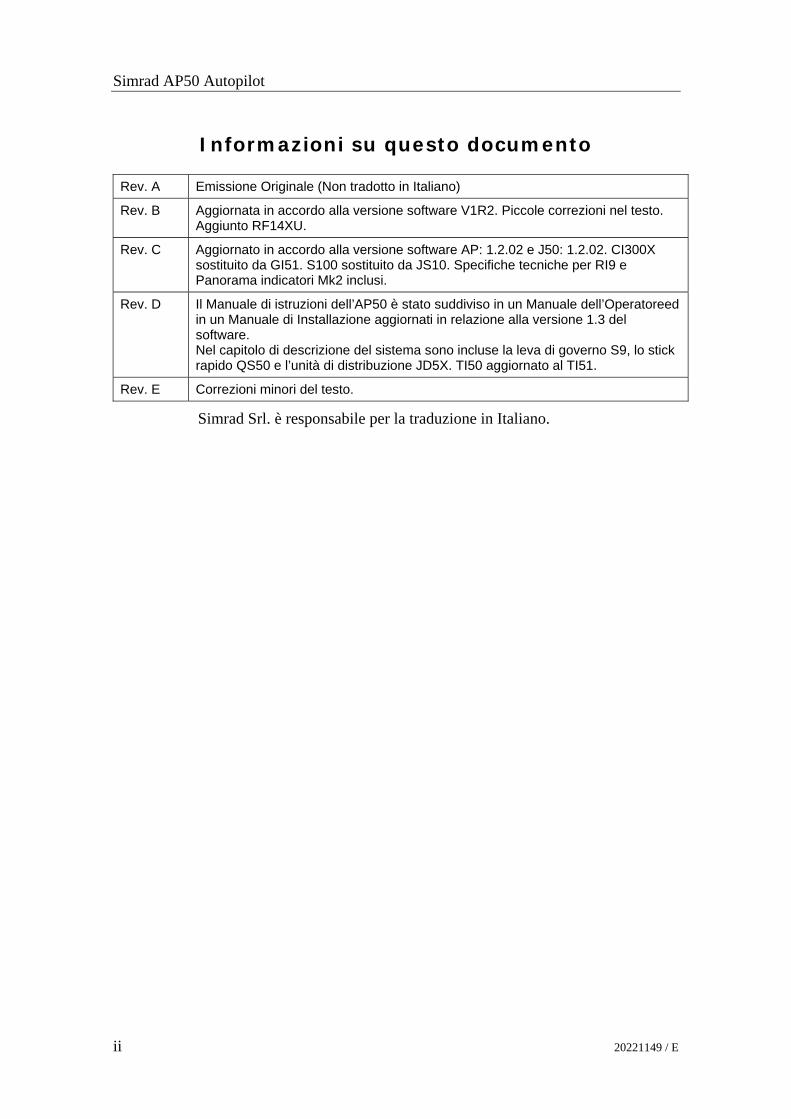
Informazioni su questo documento
Rev. A Emissione Originale (Non tradotto in Italiano)
Rev. B Aggiornata in accordo alla versione software V1R2. Piccole correzioni nel testo. Aggiunto RF14XU.
Rev. C Aggiornato in accordo alla versione software AP: 1.2.02 e J50: 1.2.02. CI300X sostituito da GI51. S100 sostituito da JS10. Specifiche tecniche per RI9 e Panorama indicatori Mk2 inclusi.
Rev. D Il Manuale di istruzioni dell’AP50 è stato suddiviso in un Manuale dell’Operatoreed in un Manuale di Installazione aggiornati in relazione alla versione 1.3 del software. Nel capitolo di descrizione del sistema sono incluse la leva di governo S9, lo stick rapido QS50 e l’unità di distribuzione JD5X. TI50 aggiornato al TI51.
Rev. E Correzioni minori del testo.
Simrad Srl. è responsabile per la traduzione in Italiano.
Informazioni Generali
20221149 / E iii
Manuale dell’Operatore
Questo manuale è stato realizzato come guida di riferimento per l’uso dell’Autopilota AP50. Il manuale è valido sia per il Sistema Standard sia per il Sistema. Grande attenzione è stata posta nella semplicità d’uso e di messa a punto dell’AP50 Simrad, ma un Autopilota è un complesso sistema elettronico. Esso viene influenzato dalle condizioni del mare, dalla velocità dell’imbarcazione e dalla forma e dimensioni della chiglia. Prendetevi il giusto tempo per leggere questo manuale e per capire completamente il funzionamento, i componenti del sistema ed il loro utilizzo all’interno del completo sistema AP50. Per la configurazione e l’impostazione si veda il Manuale di Installazione dell’AP50.
Attenzione ! Un autopilota è un aiuto alla navigazione molto importante, ma NON DEVE in qualsiasi circostanza, sostituire l’operatore.
Non usare il governo automatico quando si è:
• In zone con molto traffico o in canali stretti
• In condizioni di scarsa visibilità o con condizioni di mare estreme
• In zone dove l’uso del pilota è vietato dalla legge Quando si usa l’autopilota:
• Non lasciare il timone abbandonato
• Non posizionare alcun materiale magnetico od apparato vicino alla bussola magnetica o fluxgate usata nel sistema autopilota
• Verificare ad intervalli regolari rotta e posizione della nave
• Passare nel Modalità Standby e ridurre la velocità in tempo per evitare situazioni pericolose
Simrad AP50 Autopilota
iv 20221149 / E
Contenuti
1 INFORMAZIONI GENERALI ............................................................................1 1.1 Introduzione....................................................................................................1 1.2 Come usare questo manuale ...........................................................................2 1.3 Componenti del Sistema.................................................................................3 1.4 Unità di Comando AP50.................................................................................3 1.5 Unità di Giunzione..........................................................................................3 1.6 JD5X Unità di Distribuzione ..........................................................................4 1.7 Unità di riscontro timone................................................................................4
Unità di riscontro RF300 ................................................................................4 Unità di riscontro RF45X ...............................................................................4 Unità di riscontro RF14XU ............................................................................4
1.8 Sensori di Rotta ..............................................................................................4 Bussola elettronica RC25 ...............................................................................5 Rilevatore di Rotta CD100A ed Interfaccia Rilevatore di Rotta CDI35 ........5 Bussola NMEA...............................................................................................5 Sensore di Direzione GPS HS50 ....................................................................5 Altri modelli di bussola ..................................................................................5
Interfaccia Gyro GI51 ...........................................................................5 1.9 Apparati facoltativi .........................................................................................6
Unità di Comando Remota AP51 ...................................................................6 Comando Remoto R3000X.............................................................................6 JS10 Joystick ..................................................................................................6 QS50 Stick rapido...........................................................................................6 S35 NFU Leva di governo..............................................................................6 S9 NFU Leva di governo................................................................................7 Telecomando a Leva Follow Up FU50 ..........................................................7 Interfaccia propulsore TI51 ............................................................................7 Unità di pilotaggio analogico AD50...............................................................8 Indicatore dell’angolo di barra RI35 Mk2......................................................8 Indicatore dell’angolo di barra RI9.................................................................8 Unità di interfaccia NMEA NI300X...............................................................8
2 FUNZIONAMENTO DELL’AUTOPILOTA .....................................................9 2.1 Informazioni Generali.....................................................................................9 2.2 ON/OFF – Modalità Standby (Stby) ............................................................12 2.3 AP50 con attuatore MSD50 piedi poppieri ..................................................14
Impostazione del punto zero.........................................................................14
Informazioni Generali
20221149 / E v
Funzionamento .............................................................................................14 2.4 Governo Follow-Up (FU) .............................................................................15 2.5 Governo Non-Follow-Up (NFU)..................................................................15
S9 (NFU) Leva di governo ...........................................................................15 JS10 (NFU) Joystick.....................................................................................16 Comando remoto a pulsanti F1/2 (NFU) ......................................................16 Comando Remoto R3000X (NFU)...............................................................16 Telecomando a Leva S35 NFU.....................................................................16
2.6 Governo Automatico ....................................................................................17 Modalità AUTO............................................................................................17 Modalità AUTO-WORK ..............................................................................18
2.7 Governo con Propulsore ...............................................................................19 2.8 Navigazione con l’AP50...............................................................................21
Navigazione su Rotta....................................................................................22 Impostazione del cerchio di arrivo al waypoint............................................23 Sistema Cartografico Elettronico (ECS).......................................................24 Scelta di un Navigatore diverso....................................................................25 Modalità NAV-WORK.................................................................................25
2.9 Scansata ........................................................................................................27 Scansata in modalità Auto ............................................................................27 Scansata in modalità NAV............................................................................28
2.10 Modalità VIRATA........................................................................................29 Virata ad U....................................................................................................29 Virata a C......................................................................................................29
2.11 Sistema con stazioni multiple .......................................................................30 2.12 Funzione di Blocco.......................................................................................30
Funzionamento Standard ..............................................................................30 Funzionamento Master .................................................................................31
2.13 Selezione esterna del Sistema.......................................................................32 2.14 Menu Impostazione Utente...........................................................................32
Icona lampeggiante manopola di rotta..........................................................32 Modalità Standby..........................................................................................32 Modalità Auto...............................................................................................33 Modalità Auto-Work ....................................................................................36 Modalità Nav ................................................................................................36 Modalità Nav-Work......................................................................................37
2.15 Videate strumenti e menù .............................................................................38 Scelta delle videate .......................................................................................40 Impostazione Strumenti ................................................................................40
Simrad AP50 Autopilota
vi 20221149 / E
3 MANUTENZIONE ..............................................................................................41 3.1 Unità di Controllo .........................................................................................41 3.2 Unità di Giunzione........................................................................................41 3.3 Unità di riscontro ..........................................................................................41 3.4 Bussola (RC25).............................................................................................41 3.5 Unità di Potenza............................................................................................41 3.6 Cambio del programma software .................................................................42
4 RICERCA GUASTI.............................................................................................45 4.1 Allarmi..........................................................................................................45
5 GLOSSARIO........................................................................................................51
Funzionamento dell’Autopilota
20221149 / E 1
1 INFORMAZIONI GENERALI
1.1 Introduzione Congratulazioni per l’acquisto del vostro nuovo sistema di autopilota Simrad AP50 e grazie per aver scelto un autopilota che reputiamo il più innovativo sistema presente oggi sul mercato. Attualmente la Simrad realizza una completa gamma di Autopiloti per tutti i tipi di imbarcazione, dai piccoli sistemi per barche da diporto, agli avanzati sistemi di governo per le navi mercantili. La nostra società per questi prodotti è situata ad Egersund sulla costa sud occidentale della Norvegia. La società ha iniziato la produzione di autopiloti, con il nome Robertson, nel 1953 con apparati destinati alla flotta dei pescherecci del Mare del Nord. I navigatori professionisti di tutto il mondo confermano che i nomi Robertson e Simrad sono sinonimo della migliore tecnologia negli autopiloti. L’Autopilota AP 50 della Simrad rappresenta un’ulteriore passo in avanti nella tecnologia degli autopiloti con l’intento di fornire alle barche da pesca e alle barche da lavoro, moltissime nuove funzioni. Il sistema base può essere espanso ed arricchito con una vasta scelta di accessori. Il cervello dell’AP50 è una singola ed intelligente unità di giunzione o Unità di distribuzione che comunica con tutte le altre parti del sistema tramite la rete di collegamento ROBNET. La rete ROBNET è stata sviluppata per stabilire un’affidabile rete di comunicazione digitale e di distribuzione dell’energia tra le unità del sistema. La rete ROBNET semplifica l’installazione e consente di espandere il sistema AP50 in qualsiasi momento. Ogni unità collegata nel sistema di pilota automatico via Robnet, viene chiamata Unità Robnet.
Il sistema AP50 è realizzato e collaudato in accordo alla European Marine Equipmenti Directive 96/98. Ciò significa che attualmente l’AP50 soddisfa i più alti livelli di collaudo esistenti per gli apparati elettronici marini di navigazione non militari. La Marine Equipment Directive 96/98/EC (MED) come specificato da 98/95/EC per navi con bandiera EU o EFTA, si applica a tutte le navi nuove o esistenti che precedentemente non avevano questo tipo di apparati, e navi dove sono stati sostituiti i loro apparati. Ciò significa che tutte le parti del sistema dell’installazione coperta dall’Annesso A1, devono essere conseguentemente di tipo

Simrad AP50 Autopilota
2 20221149 / E
approvato ed avere il simbolo Timoncino, che è il simbolo di conformità con la Marine Equipment Directive. L’AP50 può anche essere installato su imbarcazioni che non devono seguire la Marine Equipment Directive, ma per assecondare la norma, un’unità di controllo AP50 deve essere impostata come “unità principale” affinché l’installazione diventi di tipo approvato. La Simrad non sarà responsabile per uso ed installazione non corretti dell’AP50, e quindi è essenziale che il personale incaricato dell’installazione conosca le richieste e legga questo manuale per l’installazione e l’uso. Lo scopo della Marine Equipmenti Directive è di aumentare la sicurezza in mare e la prevenzione dell’inquinamento marino tramite l’applicazione uniforme dei relativi strumenti internazionali riferiti agli apparati elencati in nell’AnnessoA1. Siccome esistono varie richieste comuni o di interfaccia negli standard/codici, l’integrazione del sistema e le certificazioni integrate portano ad un più efficace ed effettivo modo di trattare la sicurezza, l’ambiente e la qualità. La Marine Equipment Directive fa anche parte del International Safety Management Code (ISM). L’International Safety Management Code venne incluso come nuovo capitolo IX del SOLAS nel 1994, ed è obbligatorio per: Navi Passeggeri, non dopo il 1 Luglio 1998, petroliere, Navi per trasporto prodotti chimici, per trasporto gas, per merci varie e cargo veloci di 500 tonnellate lorde ed oltre, non oltre il 1 Luglio 1998. Altre navi cargo ed unità per perforazioni petrolifere offshore di 500 tonnellate lorde ed oltre, non dopo il 1 Luglio 2002. Si richiede che sia la compagnia armatrice, sia le navi, debbano essere certificate dall’Amministrazione (il Governo dello Stato di appartenenza della bandiera), da un’organizzazione riconosciuta dall’Amministrazione o dal Governo del paese che opera per conto dell’Amministrazione.
1.2 Come usare questo manuale Questo manuale è stato realizzato come guida di riferimento per l’uso dell’Autopilota Simrad AP50 degli eventuali apparati ausiliari. Le istruzioni di installazione e si trovano nel manuale separato di installazione dell’AP50 P/N 20222469 (Sistema Standard) e P/N 20222410 (Sistema Plus).

Funzionamento dell’Autopilota
20221149 / E 3
1.3 Componenti del Sistema Un sistema base dell’AP50 comprende le seguenti unità (fare riferimento alla Figura 1.1:
• Unità di Controllo AP50 con accessori
• Sensore di Rotta
• Unità di riscontro con leva di collegamento
• Unità di Giunzione • Unità di potenza
Figura 1.1 Sistema Base AP50
1.4 Unità di Comando AP50 L’unità di comando dell’autopilota per montaggi a pannello, appesa o su staffa. Ampio schermo LCD per la lettura dei dati autopilota e manopola per il cambio rotta. Dotata di due connettori Robnet per il collegamento del sistema ed delle espansioni.
1.5 Unità di Giunzione L’unità di Giunzione è il componente principale del sistema AP50. Essa contiene il computer di governo, i circuiti di interfaccia per tutti i componenti del sistema ed i circuiti di potenza per l’unità motrice e la frizione. Sono disponibili due versioni: la J50 e la J50-40.
Simrad AP50 Autopilota
4 20221149 / E
1.6 JD5X Unità di Distribuzione La gamma di unità di distribuzione JD5X sostituisce l’Unità di giunzione nel Sistema Plus dell’Autopilota AP50. Il sistema Plus è stato realizzato per dispositivi di governo con doppio controllo analogico o con l’impiego diretto delle due valvole direzionali. L’Unità JD5X contiene il computer di governo ed i circuiti di interfaccia per tutti I componenti del sistema. In relazione al modello contiene anche i circuiti di governo per le valvole direzionali o per i dispositivi di controllo analogico. Sono disponibili I seguenti modelli: JD50 (fornito con solenoide a bassa corrente continua), JD51 (fornito con solenoide ad alta corrente continua), JD52 (con solenoide CA) e JD53 (con uscita analogica). Si veda il Manuale di Installazione dell’AP50 P/N 20222410 (Sistema Plus).
1.7 Unità di riscontro timone
Unità di riscontro RF300 Unità di riscontro con barretta di trasmissione e 10 metri di cavo. Trasforma il movimento angolare del timone in un segnale digitale utilizzato dal computer di governo dell’Autopilota. Da usarsi su imbarcazioni medio-piccole.
Unità di riscontro RF45X Unità di riscontro con barra di trasmissione T45 e 2 metri di cavo. Trasforma il movimento angolare del timone in un segnale digitale utilizzato dal computer di governo dell’Autopilota. Da usarsi su imbarcazioni grandi.
Unità di riscontro RF14XU Questa Unità può sostituire l’Unità di riscontro RF45X in installazioni dove si preferisca una unità di riscontro con una costruzione più robusta. Oltre ai circuiti elettronici per generare i segnali di riscontro per l’autopilota e gli indicatori d’angolo di barra, esso contiene anche una coppia di interruttori di fine corsa.
1.8 Sensori di Rotta Il sistema Autopilota AP50 può essere usato con le seguenti combinazioni di sensori di rotta:
Funzionamento dell’Autopilota
20221149 / E 5
Bussola elettronica RC25 Bussola Fluxgate con sensore incorporato. Fornisce un sensazionale miglioramento delle risposte dinamiche verificabili sia durante il governo dell’Autopilota sia sullo schermo Radar.
Rilevatore di Rotta CD100A ed Interfaccia Rilevatore di Rotta CDI35 Sensore ed unità interfaccia per collegare il sistema AP50 ad una bussola magnetica. L’AP50 fornisce la corrente di eccitazione per il CD100A e converte il segnale analogico di sin/cos in un segnale di tipo digitale a due fili utilizzato dal computer di governo dell’Autopilota.
Bussola NMEA Qualsiasi bussola con segnale di uscita NMEA 0183 in uno dei formati HDT, HDG o HDM, può essere collegata direttamente all’unità di giunzione J50/J50-40, o alla NI300X. E’ raccomandabile un’uscita minima di 10 Hz o superiore.
Sensore di Direzione GPS HS50 Il Simrad HS50 è una bussola GPS che fornisce informazioni di direzione reale con posizione, velocità e velocità di accostata. Questo apparato sostituisce vari altri apparati come la girobussola, il sistema GPS ed il tachimetro. L’HS50 comprende tre parti: Unità Sensore, Unità Interfaccia e schermo. L’unità sensore contiene due sensori: il GPS ed un elemento inerziale. Questa unità deve essere installata sull’albero dell’imbarcazione. L’interfaccia contiene la scheda CPU ed i circuiti per l’interfaccia seriale e la comunicazione ad alta velocità. L’unità schermo contiene l’LCD per le informazioni di navigazione ed i pulsanti per l’uso. L’unità di Interfaccia e lo schermo devono essere installati in plancia. Fare riferimento al relativo manuale.
Altri modelli di bussola
Interfaccia giroscopica GI51
Questa unità di interfaccia collega all’AP50 le girobussole passo a passo e sincronizzate rapportate e la velocità log con 200p/min. Utilizza il segnale di uscita del ripetitore dalla girobussola e gli impulsi di uscita dal sistema velocità log per generare un segnale di direzione e velocità nel formato NMEA. L’interfaccia GI51 si collega facilmente tramite Robnet.
Simrad AP50 Autopilota
6 20221149 / E
1.9 Apparati facoltativi Sono disponibili una serie di optional per il sistema base AP50
Unità di Comando Remota AP51 Unità di commando remota portatile per l’AP50 con 7 metri di cavo. Può essere usata come comando portatile oppure fissa, montata su staffa. La presa stagna JP51 può essere usata per il veloce collegamento dell’AP51 in diversi punti dell’imbarcazione. Per il funzionamento dell’AP51, fare riferimento al relativo manuale.
Comando Remoto R3000X Un piccolo telecomando portatile con due pulsanti per il governo semi automatico o la scelta della rotta (babordo/tribordo) ed un pulsante con spia incorporata per una limitata scelta delle modalità di funzionamento.
JS10 Joystick Il JS10 Joystick è un comando a leva non Follow-Up realizzato per installazione su cruscotti sia interni che esterni. La leva è caricata a molla per il ritorno automatico nella posizione centrale; viene fornito con 10 metri di cavo ed con i componenti necessari all’installazione.
QS50 Stick rapido Il QS50 (Quick Stick) è un joystick a 2 assi per montaggi su bracciolo e su desktop ed è interfacciato con l’autopilota tramite Robnet. Il cambio di modalità viene fatto direttamente con il joystick e mediante i pulsanti modalità attuatore e WORK può essere commutato On/Off. Il governo di potenza NFU è dotato di una funzione automatica di centraggio timone. Si veda il manuale QS50.
S35 NFU Leva di governo L’S35 è adatto sia ad installazioni esterne, sia interne su pannello ed è realizzato in polissimetilene resistente agli urti.. La leva ha una molla per il ritorno sulla posizione centrale. Dispone anche di un pulsante con luce incorporata per una limitata scelta della modalità di funzionamento.
Funzionamento dell’Autopilota
20221149 / E 7
S9 NFU Leva di governo La S9 è una leva di governo a prova di spruzzi per montaggi a paratia o su console. La custodia è realizzato in alluminio stampato. Il meccanismo interno della S9 consente il bloccaggio della leva in posizione centrale ad evitarne l’uso accidentale. Quando l’impugnatura della S9 viene tirata fuori, si sgancia l’autopilota. Quando collegata all’AP50, la S9 potrà essere cablata per un governo diretto NFU.
Telecomando a Leva Follow Up FU50 Il telecomando a Leva Follow Up FU50 incorpora una scala per il timone con tacche ogni 5°. Il timone si muoverà sino al valore impostato sulla scala. Il FU50 dispone di:posizione di zero con blocco, pulsanti per una limitata scelta delle modalità di funzionamento e di indicatori di modalità (STBY, FU, AUTO, NAV, WORK e THRUSTER). E’ realizzato per installazioni interne ed esterne, a sbalzo o a pannello. Si veda lo specifico manuale del FU50.
Interfaccia propulsore TI51 Il TI51 interfaccia propulsore è stato studiato per offrire il controllo di un singolo propulsore da un sistema AP50. È dotato di controllo on/off delle elettrovalvole, di controllo continuo (voltaggio o corrente), di controllo direzionale proporzionale e di controllo di una valvola Sauer Danfoss PVEM. Il segnale di uscita per il propulsore è calcolato nella TI51 basandosi sul modalità di funzionamento e sulle informazioni di rotta ricevute via Robnet dalle altre unità. Si imposta tramite l’Unità di Comando e gli errori nell’interfaccia propulsore sono comunicati via Robnet. Tutte le impostazioni del propulsore nella Unità di controllo AP50 vengono memorizzate nell’unità di interfaccia del propulsore stesso. Fare riferimento al Manuale di Istruzione TI51.

Simrad AP50 Autopilota
8 20221149 / E
Unità di pilotaggio analogico AD50 L’Unità di pilotaggio analogico AD50 è stata realizzata per fornire un segnale di controllo per il comando di un timone di tipo analogico in un sistema AP50 o tramite una valvola analogica o proporzionale ±10V, o una valvola Danfoss PVEM. Il segnale di uscita per timone analogico, viene calcolato dall’AD50 tramite le informazioni sulle modalità di funzionamento ed alla direzione, ricevute con la rete Robnet da altre unità del sistema. L’impostazione dall’unità di controllo e gli errori nell’interfaccia analogica del timone , saranno comunicati via Robnet. Tutte le impostazioni verranno salvate nell’interfaccia analogica del timone. Fare riferimento al manuale AD50.
Indicatore dell’angolo di barra RI35 Mk2 L’RI35 è costruito in alluminio non corrosivo con rifinitura nera opaca. Lo strumento fornisce una lettura continua della posizione timone sino a 45° a destra o a sinistra. Un tasto sul pannello frontale serve per la regolazione dello zero e per l’illuminazione. La costruzione stagna consente installazioni ad incasso, a sbalzo o su staffa, in zone esposte come i ponti laterali, il fly-bridge o la sala macchine. Fare riferimento al manuale separato per l’RI35 Mk2.
Indicatore dell’angolo di barra RI9 L’indicatore RI9 è realizzato in alluminio anti corrosione con finitura nera anti riflesso. L’indicatore ha le dimensioni standard modulari (144x144 mm). Può funzionare con segnali sia in corrente, sia in tensione. L’indicatore fornisce la lettura continua dell’angolo di barra sino a 45 gradi su entrambi i lati dalla posizione centrale. (60°, 70° o 90° come opzione). La costruzione stagna ne consente l’installazione ad incasso o su piano in luoghi esposti, come i ponti laterali, il locale del timone o la sala macchine.
Unità di interfaccia NMEA NI300X Unità con 4 porte NMEA I/O per la comunicazione con altri sistemi e con un segnale di uscita di rotta nei formati, a scelta, Anritsu o Furuno. Comprende due connettori Robnet per il collegamento al sistema AP50.
Funzionamento dell’Autopilota
20221149 / E 9
2 FUNZIONAMENTO DELL’AUTOPILOTA Attenzione ! Un autopilota è un importante aiuto alla navigazione i, ma
NON DEVE mai, sostituire l’operatore.
Non usare il governo automatico quando si è:
• In zone con molto traffico o in canali stretti
• In condizioni di scarsa visibilità o con condizioni di mare estreme
• In zone dove l’uso del pilota è vietato per legge Quando si usa l’autopilota:
• Non lasciare il timone abbandonato
• Non posizionare alcun materiale o apparato magnetico vicino alla bussola magnetica o fluxgate usata nel sistema autopilota
• Verificare ad intervalli regolare la rotta e la posizione della nave
• Passare alla modalità Standby e ridurre la velocità in tempo per evitare situazioni pericolose
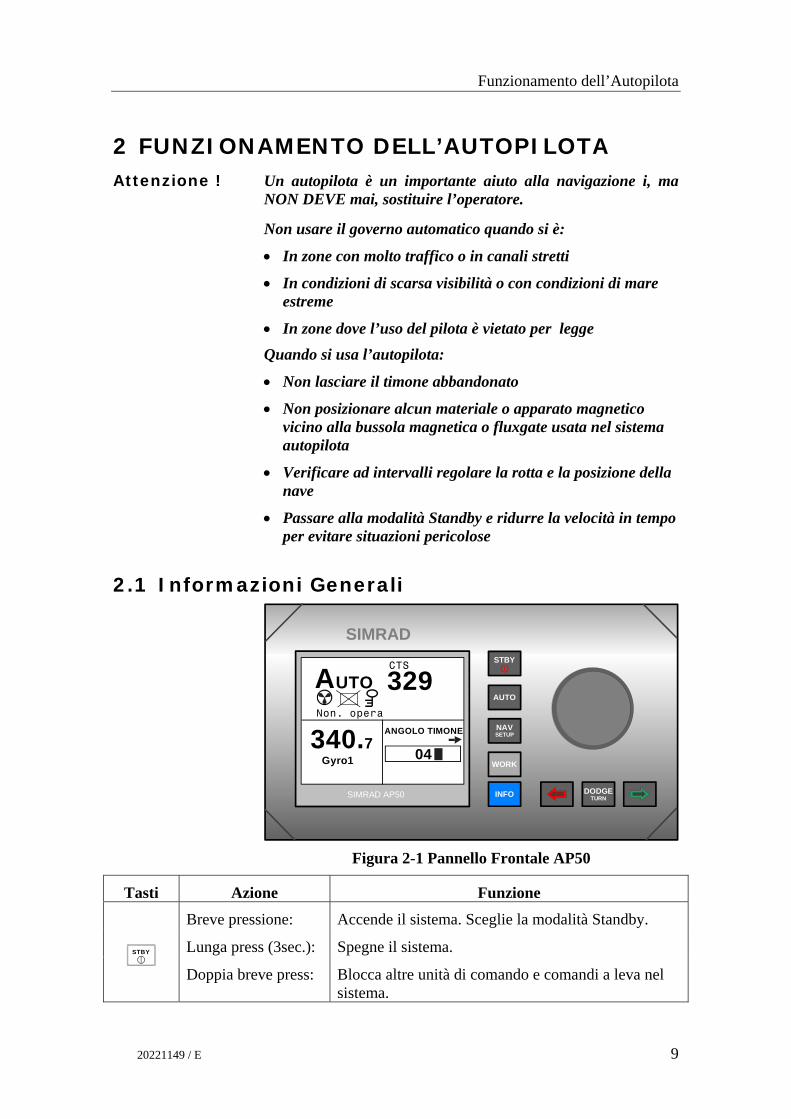
2.1 Informazioni Generali
SIMRAD
WORK
SIMRAD AP50
AUTO
INFO
STBY
DODGETURN
NAVSETUP
04340.7
Gyro1
AUTONon. opera
329CTS
ANGOLO TIMONE
Figura 2-1 Pannello Frontale AP50
Tasti Azione Funzione Breve pressione: Accende il sistema. Sceglie la modalità Standby.
Lunga press (3sec.): Spegne il sistema. STBY
Doppia breve press: Blocca altre unità di comando e comandi a leva nel
sistema.
Simrad AP50 Autopilota
10 20221149 / E
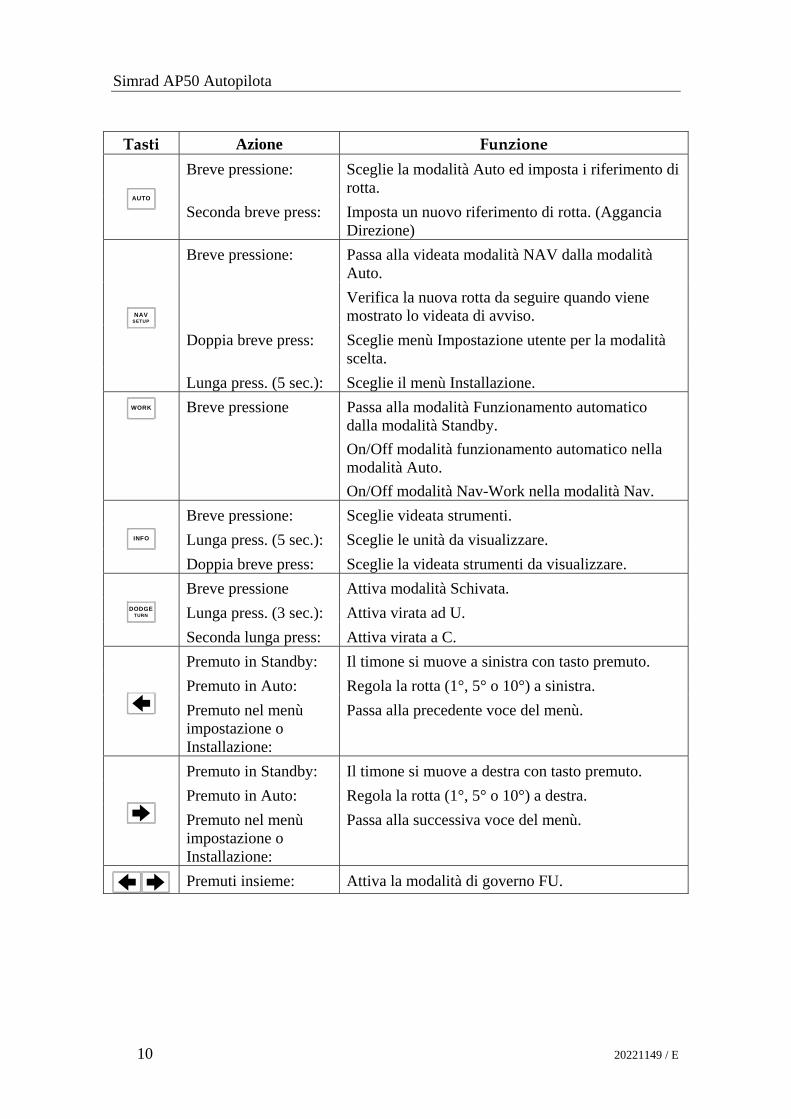
Tasti Azione Funzione Breve pressione: Sceglie la modalità Auto ed imposta i riferimento di
rotta. AUTO
Seconda breve press: Imposta un nuovo riferimento di rotta. (Aggancia Direzione)
Breve pressione: Passa alla videata modalità NAV dalla modalità Auto.
Verifica la nuova rotta da seguire quando viene mostrato lo videata di avviso.
Doppia breve press: Sceglie menù Impostazione utente per la modalità scelta.
NAVSETUP
Lunga press. (5 sec.): Sceglie il menù Installazione. WORK
Breve pressione Passa alla modalità Funzionamento automatico dalla modalità Standby. On/Off modalità funzionamento automatico nella modalità Auto. On/Off modalità Nav-Work nella modalità Nav.
Breve pressione: Sceglie videata strumenti. Lunga press. (5 sec.): Sceglie le unità da visualizzare. INFO
Doppia breve press: Sceglie la videata strumenti da visualizzare. Breve pressione Attiva modalità Schivata. Lunga press. (3 sec.): Attiva virata ad U. DODGE
TURN Seconda lunga press: Attiva virata a C. Premuto in Standby: Il timone si muove a sinistra con tasto premuto. Premuto in Auto: Regola la rotta (1°, 5° o 10°) a sinistra.
Premuto nel menù impostazione o Installazione:
Passa alla precedente voce del menù.
Premuto in Standby: Il timone si muove a destra con tasto premuto. Premuto in Auto: Regola la rotta (1°, 5° o 10°) a destra.
Premuto nel menù impostazione o Installazione:
Passa alla successiva voce del menù.
Premuti insieme: Attiva la modalità di governo FU.
Funzionamento dell’Autopilota
20221149 / E 11
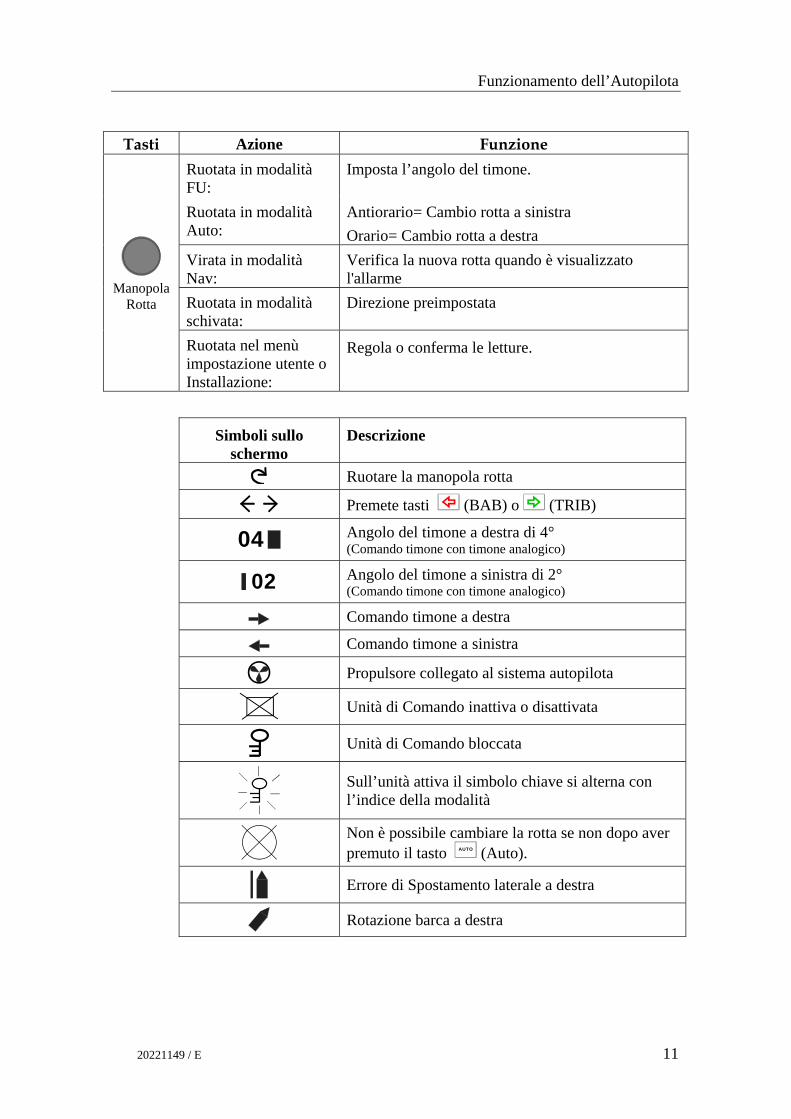
Tasti Azione Funzione Ruotata in modalità FU:
Imposta l’angolo del timone.
Ruotata in modalità Auto:
Antiorario= Cambio rotta a sinistra Orario= Cambio rotta a destra
Virata in modalità Nav:
Verifica la nuova rotta quando è visualizzato l'allarme
Ruotata in modalità schivata:
Direzione preimpostata
Manopola
Rotta
Ruotata nel menù impostazione utente o Installazione:
Regola o conferma le letture.
Simboli sullo schermo
Descrizione
Ruotare la manopola rotta
Premete tasti (BAB) o (TRIB)
04 Angolo del timone a destra di 4° (Comando timone con timone analogico)
02 Angolo del timone a sinistra di 2° (Comando timone con timone analogico)
Comando timone a destra
Comando timone a sinistra
Propulsore collegato al sistema autopilota
Unità di Comando inattiva o disattivata
Unità di Comando bloccata
Sull’unità attiva il simbolo chiave si alterna con l’indice della modalità
Non è possibile cambiare la rotta se non dopo aver premuto il tasto AUTO (Auto).
Errore di Spostamento laterale a destra
Rotazione barca a destra
Simrad AP50 Autopilota
12 20221149 / E
L’unità di comando mostrata a pagina 9 può operare singolarmente o come di un sistema multi stazione. In quest’ultima configurazione il comando può essere facilmente trasferito da una unità all’altra. L’unità non inserita indicherà “Inattiva”. Il sistema di autopilota può anche essere disattivato dal sistema di governo della nave mediante un commutatore esterno. Lo schermo mostrerà “SGANCIATO”. In questa modalità il sistema autopilota sarà completamente staccato dal sistema principale/emergenza della nave. L’AP50 dispone delle seguenti modalità di governo principali: STBY (FU-NFU), AUTO, NAV, e DODGE , ogni modalità con pulsante dedicato. Le modalità Auto e Nav hanno anche una sotto-modalità cui si accede azionando il tasto Work. Le sotto-modalità Auto-Work e Nav-Work vengono usate in condizioni operative diverse da quelle normalmente riscontrabili quando l’imbarcazione naviga su una rotta preimpostata. Ogni tasto di modalità è chiaramente identificato con la funzione primaria indicata con caratteri grandi e la funzione secondaria in caratteri più piccoli. Ogni pulsante consente l’accesso ad una videata principale, ad una videata secondaria e/o a videate multifunzione. L’operatore può modificare una serie di parametri, appartenenti alla modalità selezionata, localizzati nel menù Impostazione Utente dell’AP50 (pag. 32). Le impostazioni consentono la modifica della visibilità dello schermo, la scelta dei sensori di rotta, delle sorgenti di navigazione e di posizione oltre alla scelta tra selezione automatica o manuale del filtro dello stato mare. Eventuali allarmi vengono indicati in grassetto per informarvi di anomalie del sistema o degli apparati esterni collegati. L’avviso di allarme sarà sia visivo che acustico. L’elenco degli allarmi è a pag. 46.
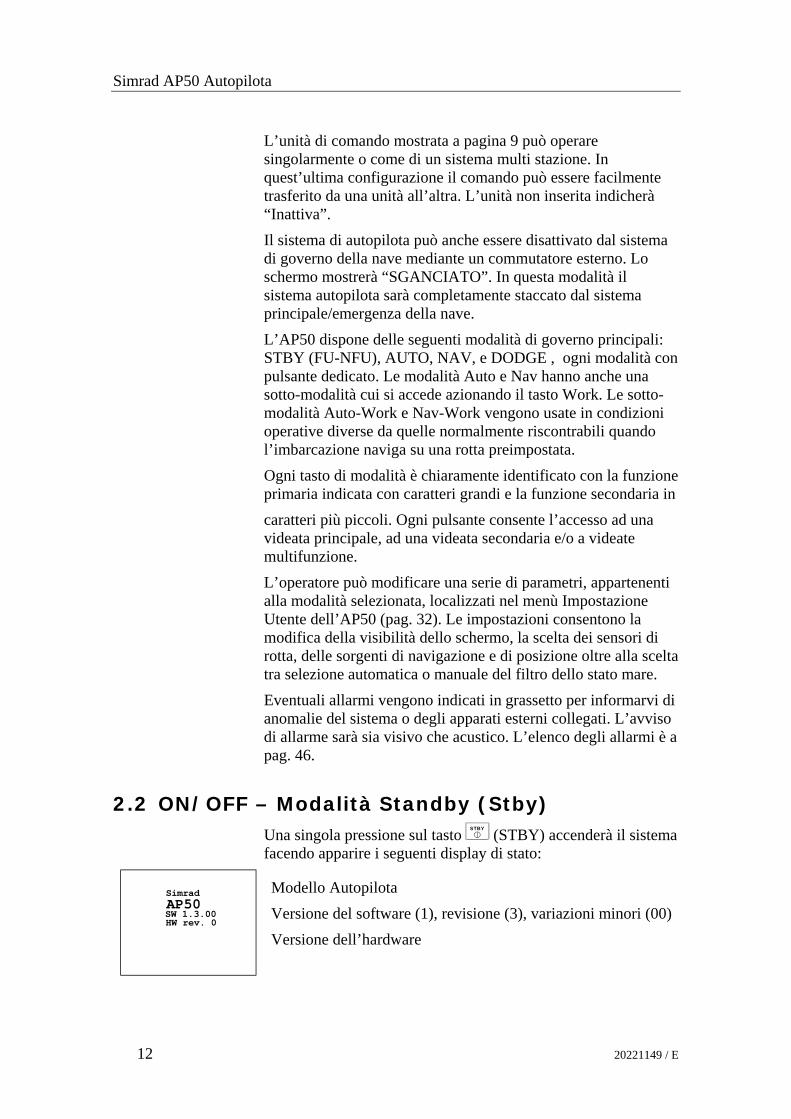
2.2 ON/OFF – Modalità Standby (Stby) Una singola pressione sul tasto STBY (STBY) accenderà il sistema facendo apparire i seguenti display di stato:
HW rev. 0SW 1.3.00AP50Simrad
Modello Autopilota Versione del software (1), revisione (3), variazioni minori (00) Versione dell’hardware
Funzionamento dell’Autopilota
20221149 / E 13
P05 M00 S000SW 1.3.00J50Simrad
Modello Unità di Giunzione Versione del software (1), revisione (3), variazioni minori (00) Revisione del PCB di potenza, del PCB principale e di auto controllo (Le revisioni SW e HW indicate, sono solo degli esempi)
Dopo circa 5 secondi il sistema è operativo e sull’unità da cui si è acceso il sistema compare la videata modalità principale STBY. Le altre unità del sistema indicheranno “Inattiva”. Il comando può essere attuato da qualsiasi unità semplicemente premendo il tasto STBY dall’unità desiderata. (Fatta eccezione dal sistema Timoncino. Vedasi Introduzione a pag. 1).
Una pressione più lunga (3 sec) sul pulsante STBY (STBY) porterà il sistema su OFF. In questo periodo suonerà l’allarme.
Nota ! In emergenza, in un sistema multi stazione, è possibile spegnere l’Autopilota da qualsiasi unità di comando premendo il tasto
STBY (STBY) per 2-3 secondi. (Escluso il sistema Wheelmark).
La modalità Stby è quella usata quando si governa l’imbarcazione con il timone.
ANGOLO TIMONE
02
340.7Gyro1
STBY
Videata Info:
• Modalità Standby
• La rotta attuale dalla girobussola è 340.7°.
• L’angolo del timone è di 2° a destra. Quando non c’è segnale dall’unità di riscontro (Comando timone analogico), la lettura del timone indica– –).
02
ADJUST COMPASS INPUT?
Regola:OK? Press or
Gyro2Rotta 018°Offset +018°
ANGOLO TIMONE
Giroscopi passo a
passo o Sincronizzato
ANGOLO TIMONE
- -
340.7Gyro1
STBY
Timone analogico
Se al sistema Autopilota è collegata una Bussola giroscopica passo-passo sincronizzata tramite interfaccia GI50, prima di entrare nella modalità Standby, compare una videata di regolazione della rotta. Usare la manopola di rotta per allineare la lettura dell’autopilota a quella della girobussola. Verificare l’allineamento ogni volta che l’autopilota/girobussola vengono spenti. Se sono collegate due girobussole passo-passo, dovranno essere allineate entrambe.
Premete il tasto (BAB) o (TRIB) per procedere nella modalità Standby. Se viene indicato il simbolo di inattività (quando l’alimentazione è fornita da FU50 o quando Disattivata), l’unità di Controllo dovrà essere attivata, prima dell’allineamento, premendo il tasto STBY.

Simrad AP50 Autopilota
14 20221149 / E
2.3 AP50 con attuatore MSD50 piedi poppieri
Nota ! Le informazioni nella sezione 2.3 sono valide solo se l’autopilota comanda un attuatore Simrad MSD50 per Piedi poppieri.
L’attuatore MSD50 per piedi poppieri fornisce un segnale di riscontro relativo che richiede l’allineamento del punto zero dopo che l’Autopilota sarà stato acceso. Per ulteriori informazioni fare riferimento al manuale MSD50.
Impostazione del punto zero
Nota ! Se, quando lasciate la banchina, non si ha bisogno dell’indicazione dell’angolo del timone, portare semplicemente l’imbarcazione su una rotta diritta e premere il tasto AUTO. Il punto zero verrà impostato automaticamente.
10
340.7Gyro1
STBY
ANGOLO TIMONE
Se si preferisse usare la visualizzazione dell’angolo del timone anche quando si lasciate la banchina, procedere in questa modalità: Dopo l’accensione, la visualizzazione dell’angolo del timone si alternerà tra 10 gradi a destra e 10 gradi a sinistra ad indicare la necessità di impostare il punto zero. Usare la ruota per portare il timone sulla sua posizione centrale. Portare il timone da un’estremità all’altra e contate il numero esatto di giri. Tornare quindi indietro della metà esatta dei giri contati.
ANGOLO TIMONE
00
340.7Gyro1
STBY
Premere il tasto AUTO e quindi il tasto STBY. Il punto zero verrà così impostato e sullo schermo comparirà la seguente videata.
Funzionamento Seguire le istruzioni di funzionamento nelle pagine seguenti. Non vi sarà altra necessità di impostare il punto zero sino alla prossima accensione del pilota automatico.
Funzionamento dell’Autopilota
20221149 / E 15
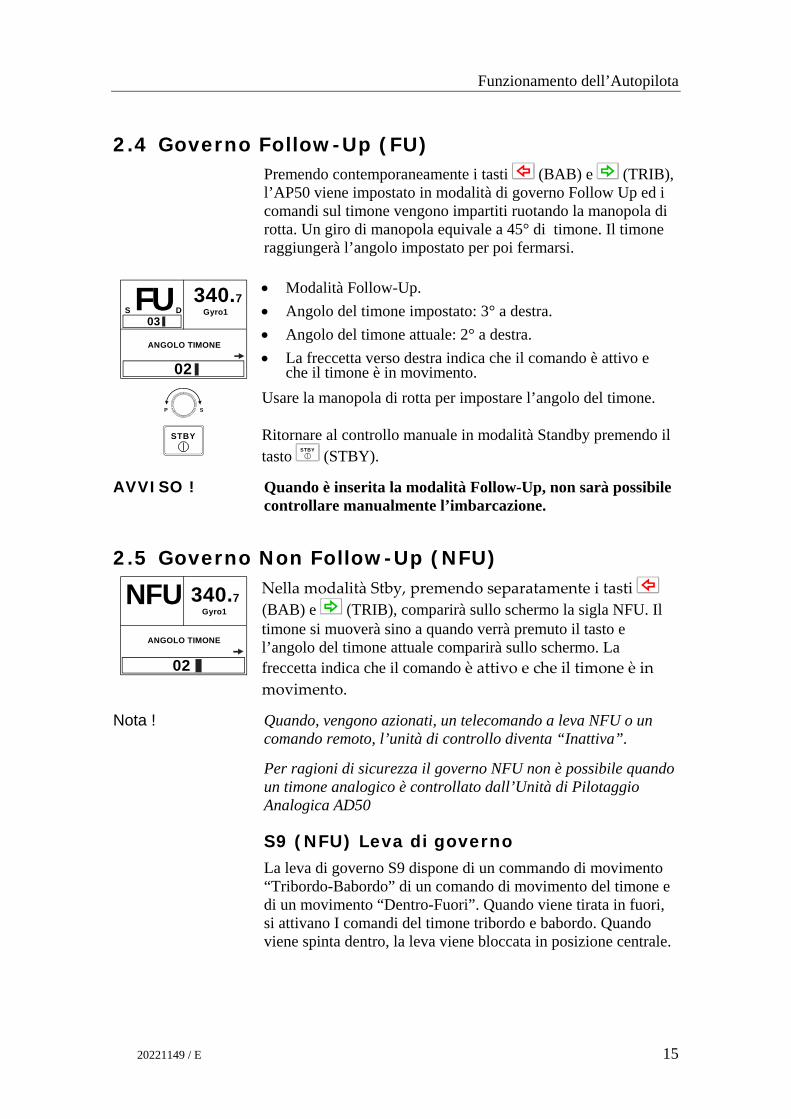
2.4 Governo Follow-Up (FU) Premendo contemporaneamente i tasti (BAB) e (TRIB), l’AP50 viene impostato in modalità di governo Follow Up ed i comandi sul timone vengono impartiti ruotando la manopola di rotta. Un giro di manopola equivale a 45° di timone. Il timone raggiungerà l’angolo impostato per poi fermarsi.
02
03S D
340.7Gyro1FU
ANGOLO TIMONE
• Modalità Follow-Up. • Angolo del timone impostato: 3° a destra. • Angolo del timone attuale: 2° a destra. • La freccetta verso destra indica che il comando è attivo e
che il timone è in movimento.
P S Usare la manopola di rotta per impostare l’angolo del timone.
STBY
Ritornare al controllo manuale in modalità Standby premendo il tasto STBY (STBY).
AVVISO ! Quando è inserita la modalità Follow-Up, non sarà possibile controllare manualmente l’imbarcazione.
2.5 Governo Non Follow-Up (NFU)
02
NFU 340.7Gyro1
ANGOLO TIMONE
Nella modalità Stby, premendo separatamente i tasti (BAB) e (TRIB), comparirà sullo schermo la sigla NFU. Il timone si muoverà sino a quando verrà premuto il tasto e l’angolo del timone attuale comparirà sullo schermo. La freccetta indica che il comando è attivo e che il timone è in movimento.
Nota ! Quando, vengono azionati, un telecomando a leva NFU o un comando remoto, l’unità di controllo diventa “Inattiva”.
Per ragioni di sicurezza il governo NFU non è possibile quando un timone analogico è controllato dall’Unità di Pilotaggio Analogica AD50
S9 (NFU) Leva di governo La leva di governo S9 dispone di un commando di movimento “Tribordo-Babordo” di un comando di movimento del timone e di un movimento “Dentro-Fuori”. Quando viene tirata in fuori, si attivano I comandi del timone tribordo e babordo. Quando viene spinta dentro, la leva viene bloccata in posizione centrale.
Simrad AP50 Autopilota
16 20221149 / E
Quando cablata in modo opportuno, la S9 potrà anche eseguire cambiamenti di modalità e potrà funzionare come commando prioritario. Quando si impiega la S0 osservare lo schermo dell’autopilota.
JS10 (NFU) Joystick Nella modalità Stby il timone si muoverà sino a quando la leva verrà tenuta a Destra o a Sinistra.
Comando remoto a pulsanti F1/2 (NFU) Nella modalità Stby il timone si muoverà sino a quando verrà premuto il tasto Babordo o Tribordo.
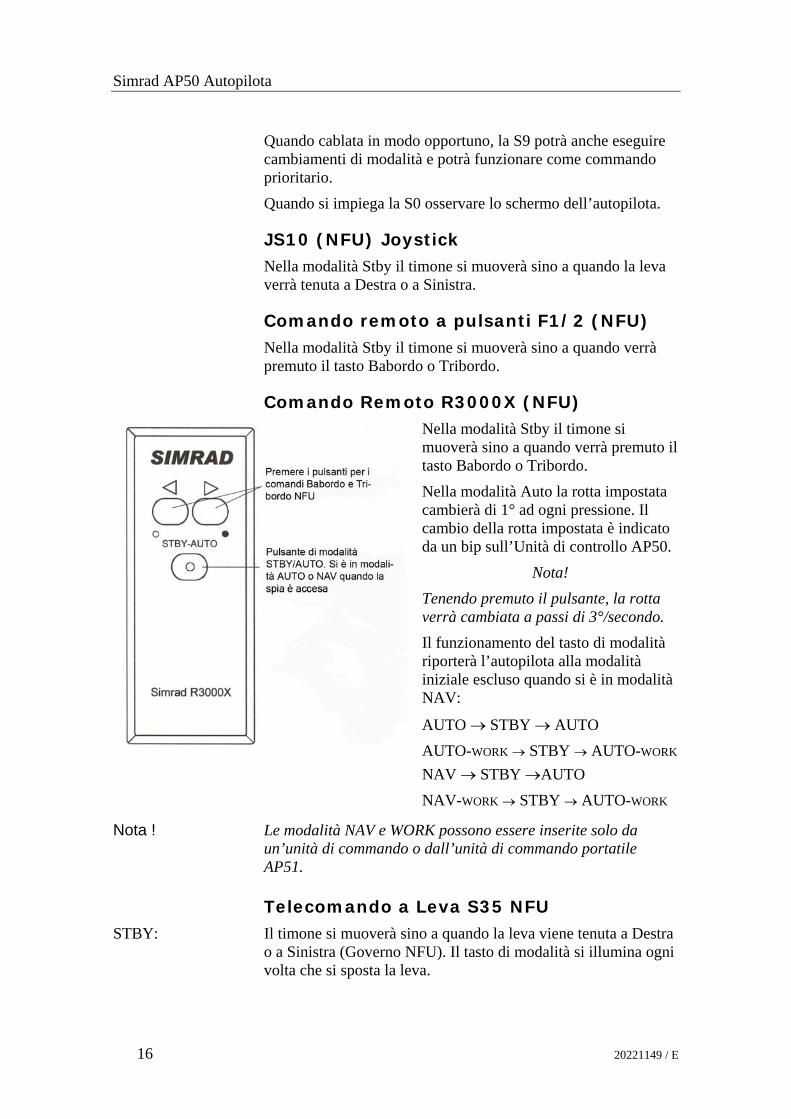
Comando Remoto R3000X (NFU) Nella modalità Stby il timone si muoverà sino a quando verrà premuto il tasto Babordo o Tribordo. Nella modalità Auto la rotta impostata cambierà di 1° ad ogni pressione. Il cambio della rotta impostata è indicato da un bip sull’Unità di controllo AP50.
Nota! Tenendo premuto il pulsante, la rotta verrà cambiata a passi di 3°/secondo. Il funzionamento del tasto di modalità riporterà l’autopilota alla modalità iniziale escluso quando si è in modalità NAV:
AUTO → STBY → AUTO AUTO-WORK → STBY → AUTO-WORK NAV → STBY →AUTO NAV-WORK → STBY → AUTO-WORK
Nota ! Le modalità NAV e WORK possono essere inserite solo da un’unità di commando o dall’unità di commando portatile AP51.
Telecomando a Leva S35 NFU STBY: Il timone si muoverà sino a quando la leva viene tenuta a Destra
o a Sinistra (Governo NFU). Il tasto di modalità si illumina ogni volta che si sposta la leva.
Funzionamento dell’Autopilota
20221149 / E 17
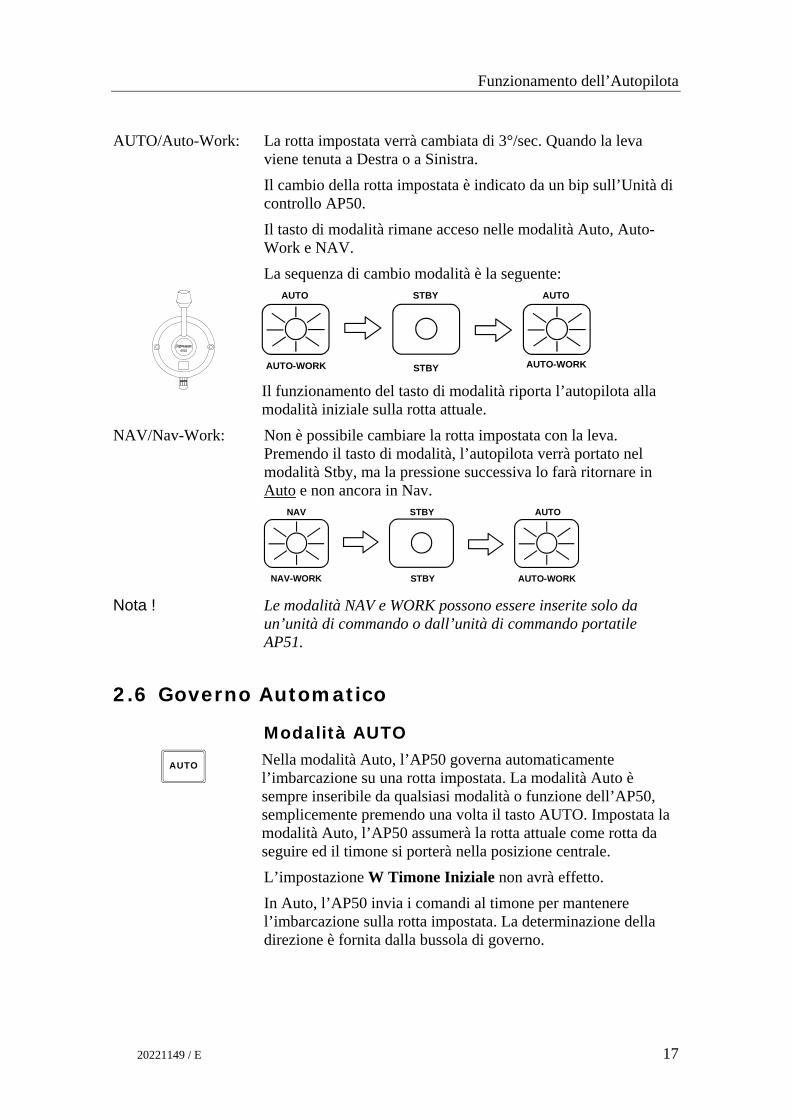
AUTO/Auto-Work: La rotta impostata verrà cambiata di 3°/sec. Quando la leva viene tenuta a Destra o a Sinistra. Il cambio della rotta impostata è indicato da un bip sull’Unità di controllo AP50. Il tasto di modalità rimane acceso nelle modalità Auto, Auto-Work e NAV. La sequenza di cambio modalità è la seguente:
AUTO-WORK STBY
AUTO STBY
AUTO-WORK
AUTO
Il funzionamento del tasto di modalità riporta l’autopilota alla modalità iniziale sulla rotta attuale.
NAV/Nav-Work: Non è possibile cambiare la rotta impostata con la leva. Premendo il tasto di modalità, l’autopilota verrà portato nel modalità Stby, ma la pressione successiva lo farà ritornare in Auto e non ancora in Nav.
NAV-WORK STBY AUTO-WORK
NAV STBY AUTO
Nota ! Le modalità NAV e WORK possono essere inserite solo da un’unità di commando o dall’unità di commando portatile AP51.
2.6 Governo Automatico
Modalità AUTO
AUTO
Nella modalità Auto, l’AP50 governa automaticamente l’imbarcazione su una rotta impostata. La modalità Auto è sempre inseribile da qualsiasi modalità o funzione dell’AP50, semplicemente premendo una volta il tasto AUTO. Impostata la modalità Auto, l’AP50 assumerà la rotta attuale come rotta da seguire ed il timone si porterà nella posizione centrale. L’impostazione W Timone Iniziale non avrà effetto. In Auto, l’AP50 invia i comandi al timone per mantenere l’imbarcazione sulla rotta impostata. La determinazione della direzione è fornita dalla bussola di governo.
Simrad AP50 Autopilota
18 20221149 / E
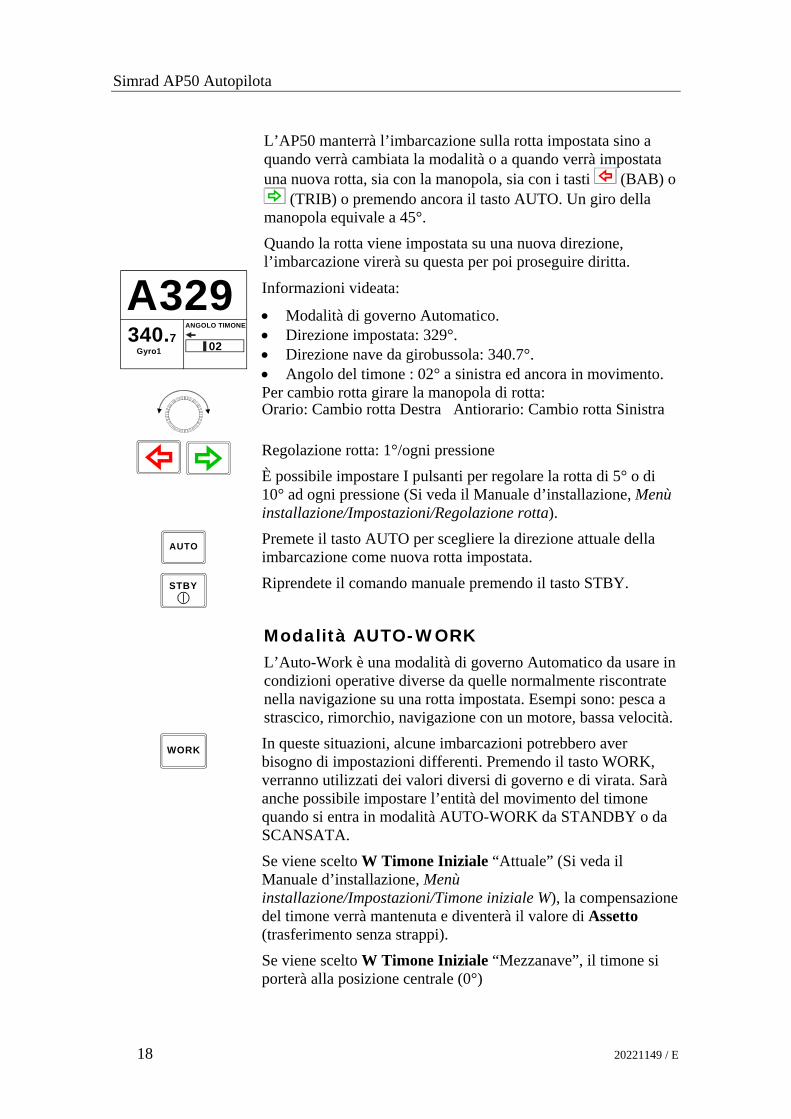
L’AP50 manterrà l’imbarcazione sulla rotta impostata sino a quando verrà cambiata la modalità o a quando verrà impostata una nuova rotta, sia con la manopola, sia con i tasti (BAB) o
(TRIB) o premendo ancora il tasto AUTO. Un giro della manopola equivale a 45°. Quando la rotta viene impostata su una nuova direzione, l’imbarcazione virerà su questa per poi proseguire diritta.
A32902
340.7Gyro1
ANGOLO TIMONE
Informazioni videata:
• Modalità di governo Automatico. • Direzione impostata: 329°. • Direzione nave da girobussola: 340.7°. • Angolo del timone : 02° a sinistra ed ancora in movimento.
Per cambio rotta girare la manopola di rotta: Orario: Cambio rotta Destra Antiorario: Cambio rotta Sinistra
Regolazione rotta: 1°/ogni pressione È possibile impostare I pulsanti per regolare la rotta di 5° o di 10° ad ogni pressione (Si veda il Manuale d’installazione, Menù installazione/Impostazioni/Regolazione rotta).
AUTO
Premete il tasto AUTO per scegliere la direzione attuale della imbarcazione come nuova rotta impostata.
STBY
Riprendete il comando manuale premendo il tasto STBY.
Modalità AUTO-WORK L’Auto-Work è una modalità di governo Automatico da usare in condizioni operative diverse da quelle normalmente riscontrate nella navigazione su una rotta impostata. Esempi sono: pesca a strascico, rimorchio, navigazione con un motore, bassa velocità.
WORK
In queste situazioni, alcune imbarcazioni potrebbero aver bisogno di impostazioni differenti. Premendo il tasto WORK, verranno utilizzati dei valori diversi di governo e di virata. Sarà anche possibile impostare l’entità del movimento del timone quando si entra in modalità AUTO-WORK da STANDBY o da SCANSATA. Se viene scelto W Timone Iniziale “Attuale” (Si veda il Manuale d’installazione, Menù installazione/Impostazioni/Timone iniziale W), la compensazione del timone verrà mantenuta e diventerà il valore di Assetto (trasferimento senza strappi). Se viene scelto W Timone Iniziale “Mezzanave”, il timone si porterà alla posizione centrale (0°)
Funzionamento dell’Autopilota
20221149 / E 19
Quando si passa a WORK da qualsiasi altra modalità automatica e quando si passa al governo della direzione dal governo di rotta, la compensazione del timone verrà sempre mantenuta. Per cambiare manualmente il valore di Assetto o altre impostazioni WORK, premere due volte rapidamente il tasto NAV
SETUP (NAV/SETUP) (Si veda Modalità AUTO-WORK nel menù Impostazioni Utente a pagina 36.
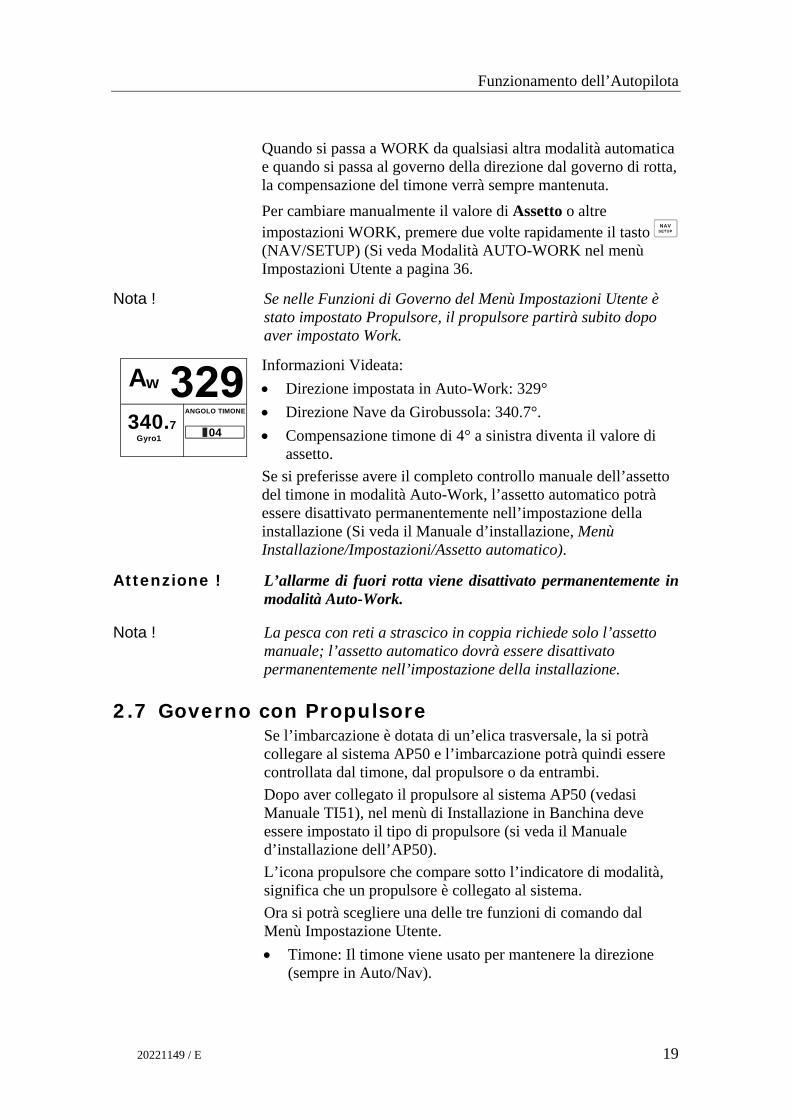
Nota ! Se nelle Funzioni di Governo del Menù Impostazioni Utente è stato impostato Propulsore, il propulsore partirà subito dopo aver impostato Work.
S34504
Aw
340.7Gyro1
ANGOLO TIMONE
Informazioni Videata: • Direzione impostata in Auto-Work: 329° • Direzione Nave da Girobussola: 340.7°. • Compensazione timone di 4° a sinistra diventa il valore di
assetto. Se si preferisse avere il completo controllo manuale dell’assetto del timone in modalità Auto-Work, l’assetto automatico potrà essere disattivato permanentemente nell’impostazione della installazione (Si veda il Manuale d’installazione, Menù Installazione/Impostazioni/Assetto automatico).
Attenzione ! L’allarme di fuori rotta viene disattivato permanentemente in modalità Auto-Work.
Nota ! La pesca con reti a strascico in coppia richiede solo l’assetto manuale; l’assetto automatico dovrà essere disattivato permanentemente nell’impostazione della installazione.
2.7 Governo con Propulsore Se l’imbarcazione è dotata di un’elica trasversale, la si potrà collegare al sistema AP50 e l’imbarcazione potrà quindi essere controllata dal timone, dal propulsore o da entrambi. Dopo aver collegato il propulsore al sistema AP50 (vedasi Manuale TI51), nel menù di Installazione in Banchina deve essere impostato il tipo di propulsore (si veda il Manuale d’installazione dell’AP50). L’icona propulsore che compare sotto l’indicatore di modalità, significa che un propulsore è collegato al sistema. Ora si potrà scegliere una delle tre funzioni di comando dal Menù Impostazione Utente. • Timone: Il timone viene usato per mantenere la direzione
(sempre in Auto/Nav).
Simrad AP50 Autopilota
20 20221149 / E
• Propulsore: Il propulsore viene usato per mantenere la direzione (solo in Auto Work/Nav Work/FU/NFU).
• Timone + propulsore: Il timone e il propulsore vengono usati per mantenere la direzione (solo in Auto Work/Nav Work/FU/NFU).
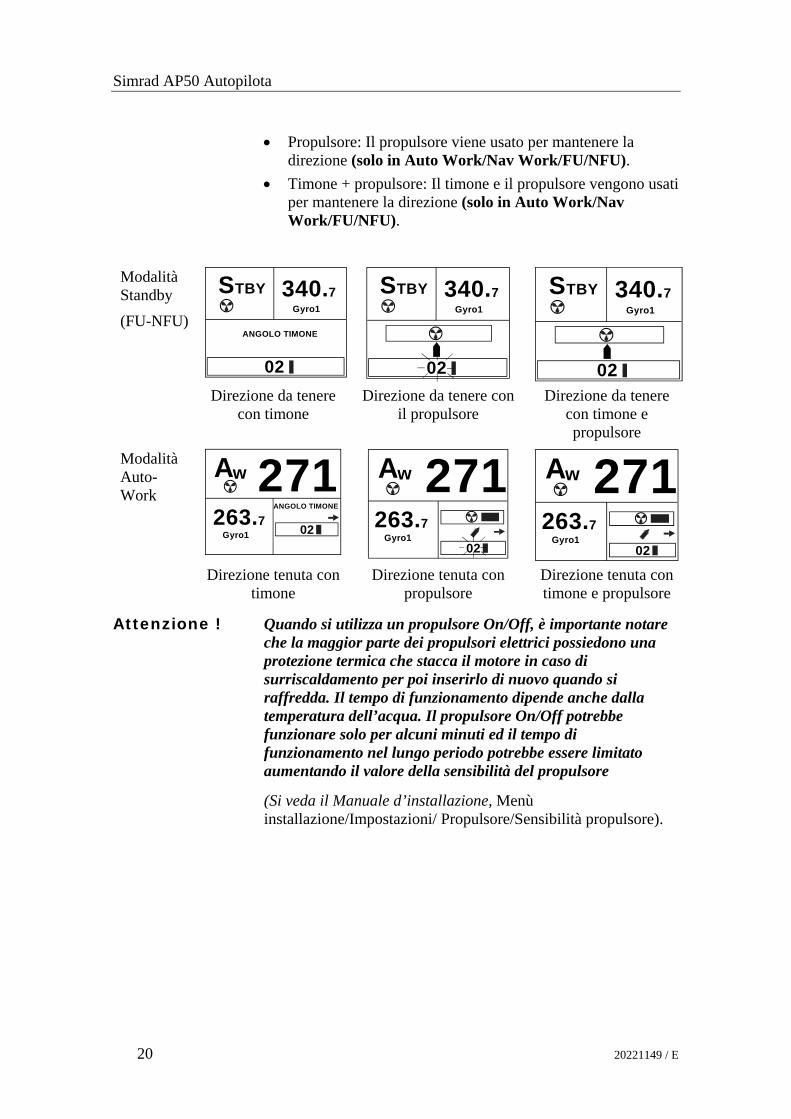
Modalità Standby (FU-NFU)
02
340.7Gyro1
STBY
ANGOLO TIMONE
02
340.7Gyro1
STBY
02
340.7Gyro1
STBY
Direzione da tenere con timone
Direzione da tenere con il propulsore
Direzione da tenere con timone e propulsore
Modalità Auto-Work 271
02
Aw
263.7Gyro1
ANGOLO TIMONE
271Aw
263.7Gyro1
02
271Aw
263.7Gyro1
02
Direzione tenuta con timone
Direzione tenuta con propulsore
Direzione tenuta con timone e propulsore
Attenzione ! Quando si utilizza un propulsore On/Off, è importante notare che la maggior parte dei propulsori elettrici possiedono una protezione termica che stacca il motore in caso di surriscaldamento per poi inserirlo di nuovo quando si raffredda. Il tempo di funzionamento dipende anche dalla temperatura dell’acqua. Il propulsore On/Off potrebbe funzionare solo per alcuni minuti ed il tempo di funzionamento nel lungo periodo potrebbe essere limitato aumentando il valore della sensibilità del propulsore
(Si veda il Manuale d’installazione, Menù installazione/Impostazioni/ Propulsore/Sensibilità propulsore).
Funzionamento dell’Autopilota
20221149 / E 21
2.8 Navigazione con l’AP50 L’AP50 ha la capacità di usare informazioni di governo provenienti da un ricevitore di navigazione esterno (GPS/Plotter cartografico o ECS), per dirigere l’imbarcazione su di uno specifico waypoint o attraverso una serie di waypoints. Nella modalità NAV, l’AP50 usa il sensore di rotta come sua fonte primaria per il mantenimento della rotta. Le informazioni di governo e di velocità provenienti dal ricevitore di navigazione modificano la rotta impostata per dirigere l’AP50 sul waypoint di destinazione.
Nota ! La modalità di Navigazione Automatica dovrà essere usata solo in acque aperte. Il fatto di avere un ricevitore di navigazione collegato all’Autopilota potrebbe portare ad una reazione lenta. Selezionando la modalità NAV, l’AP50 governa l’imbarcazione mantenendo la rotta attuale e quindi attende che l’utilizzatore accetti il cambiodi rotta per il waypoint di destinazione.
Per ottenere una soddisfacente Navigazione Automatica, prima di inserire la modalità NAV, si dovranno eseguire i punti seguenti punti:
• Il governo Automatico dell’AP50 dovrà essere collaudato e trovato soddisfacente.
• Il ricevitore di navigazione (GPS/Plotter cartografico o ECS) dovrà essere attivo e ricevere un buon segnale con adeguate caratteristiche per un valido rilevamento e validi dati di navigazione.
• Nel ricevitore di navigazione si dovrà memorizzare almeno un waypoint da definire come destinazione.
• La fonte di Navigazione nel Menù Impostazione Utente dell’AP50 dovrà essere impostata sul ricevitore di navigazione che contiene il waypoint di destinazione.
L’AP 50 è stato studiato per il funzionamento di navigazione in modalità mista. Ciò combina l’accurata capacità di governo derivante dal segnale di errore di fuori rotta (XTE) con la capacità di virata derivante dalla indicazione del rilevamento o della rotta per la destinazione (CTS).
NAVSETUP
Stando in modalità Auto premere il tasto Nav per attivare la videata NAV.
Simrad AP50 Autopilota
22 20221149 / E
270°
OK? Press NAV
340.7Gyro1
70°
01
WP: SIMRAD
BWW :
Chg :
ANGOLO TIMONE
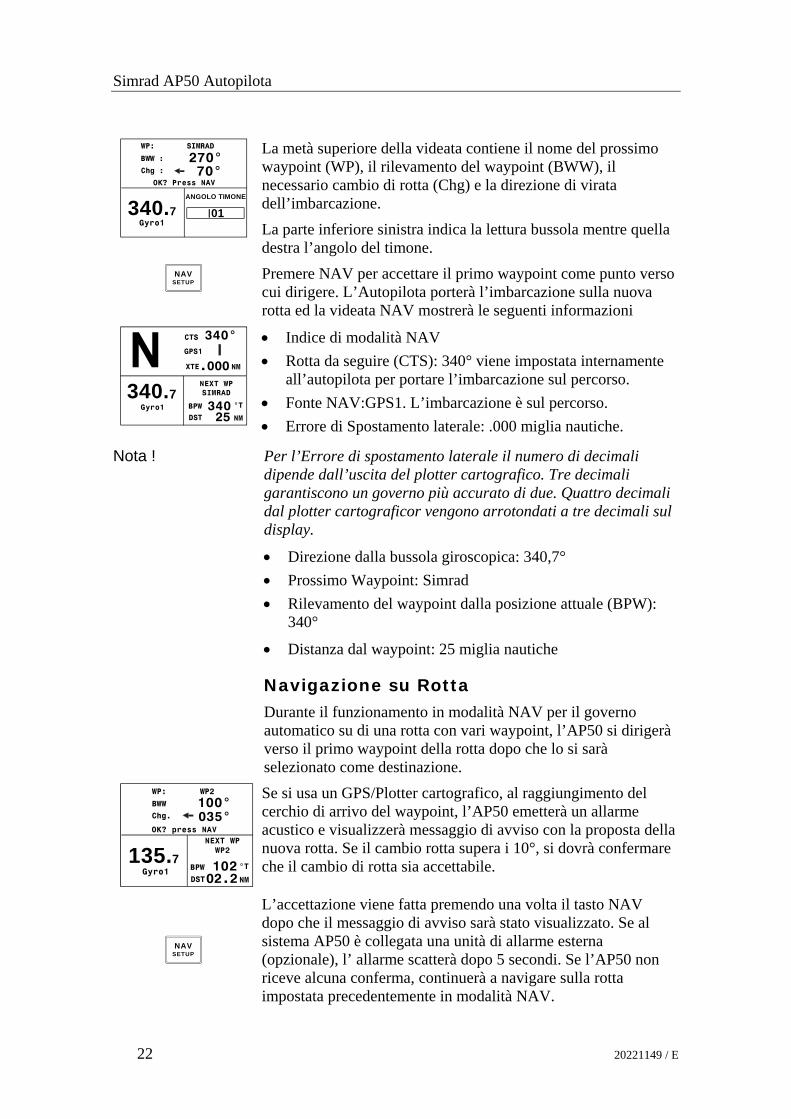
La metà superiore della videata contiene il nome del prossimo waypoint (WP), il rilevamento del waypoint (BWW), il necessario cambio di rotta (Chg) e la direzione di virata dell’imbarcazione. La parte inferiore sinistra indica la lettura bussola mentre quella destra l’angolo del timone.
NAVSETUP
Premere NAV per accettare il primo waypoint come punto verso cui dirigere. L’Autopilota porterà l’imbarcazione sulla nuova rotta ed la videata NAV mostrerà le seguenti informazioni
NEXT WPSIMRAD340.7
Gyro1
340°GPS1
CTS
XTE.000NM
BPWDST
34025 NM
°T
• Indice di modalità NAV • Rotta da seguire (CTS): 340° viene impostata internamente
all’autopilota per portare l’imbarcazione sul percorso. • Fonte NAV:GPS1. L’imbarcazione è sul percorso. • Errore di Spostamento laterale: .000 miglia nautiche.
Nota ! Per l’Errore di spostamento laterale il numero di decimali dipende dall’uscita del plotter cartografico. Tre decimali garantiscono un governo più accurato di due. Quattro decimali dal plotter cartograficor vengono arrotondati a tre decimali sul display.
• Direzione dalla bussola giroscopica: 340,7° • Prossimo Waypoint: Simrad • Rilevamento del waypoint dalla posizione attuale (BPW):
340°
• Distanza dal waypoint: 25 miglia nautiche
Navigazione su Rotta Durante il funzionamento in modalità NAV per il governo automatico su di una rotta con vari waypoint, l’AP50 si dirigerà verso il primo waypoint della rotta dopo che lo si sarà selezionato come destinazione.
NEXT WPWP2
OK? press NAV
Gyro1
035°
BWW
WP: WP2
100°Chg.
135.7BPW
DST10202.2NM
°T
Se si usa un GPS/Plotter cartografico, al raggiungimento del cerchio di arrivo del waypoint, l’AP50 emetterà un allarme acustico e visualizzerà messaggio di avviso con la proposta della nuova rotta. Se il cambio rotta supera i 10°, si dovrà confermare che il cambio di rotta sia accettabile.
NAVSETUP
L’accettazione viene fatta premendo una volta il tasto NAV dopo che il messaggio di avviso sarà stato visualizzato. Se al sistema AP50 è collegata una unità di allarme esterna (opzionale), l’ allarme scatterà dopo 5 secondi. Se l’AP50 non riceve alcuna conferma, continuerà a navigare sulla rotta impostata precedentemente in modalità NAV.
Funzionamento dell’Autopilota
20221149 / E 23
Riprendere il governo manuale in qualsiasi momento premendo il tasto STBY (STBY). Se come nome del WP finale viene usato “FINE ROTTA”, sull’unità di controllo attiva, al raggiungimento del WP finale, comparirà un messaggio di avviso di “Fine della rotta”.
Nota ! Se l’AP 50 è collegato ad un ricevitore di Navigazione che non trasmette il messaggio con il rilevamento del Waypoint successivo, verrà utilizzato solo il dato di XTE Errore di Fuori Rotta. In questo caso al raggiungimento di un Waypoint si dovrà selezionare AUTO, impostare manualmente la nuova rotta per la nuova destinazione e quindi selezionare nuovamente NAV.
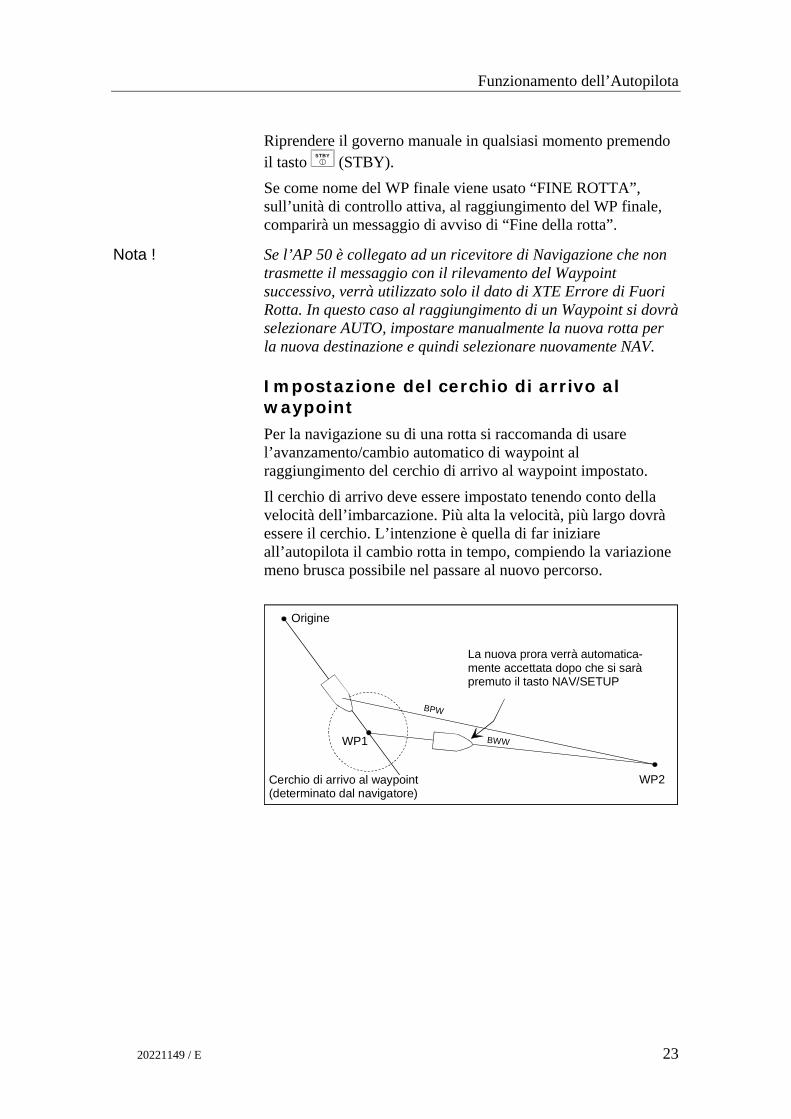
Impostazione del cerchio di arrivo al waypoint Per la navigazione su di una rotta si raccomanda di usare l’avanzamento/cambio automatico di waypoint al raggiungimento del cerchio di arrivo al waypoint impostato. Il cerchio di arrivo deve essere impostato tenendo conto della velocità dell’imbarcazione. Più alta la velocità, più largo dovrà essere il cerchio. L’intenzione è quella di far iniziare all’autopilota il cambio rotta in tempo, compiendo la variazione meno brusca possibile nel passare al nuovo percorso.
Origine
WP2
La nuova prora verrà automatica-mente accettata dopo che si saràpremuto il tasto NAV/SETUP
Cerchio di arrivo al waypoint(determinato dal navigatore)
WP1 BWW
BPW
Simrad AP50 Autopilota
24 20221149 / E
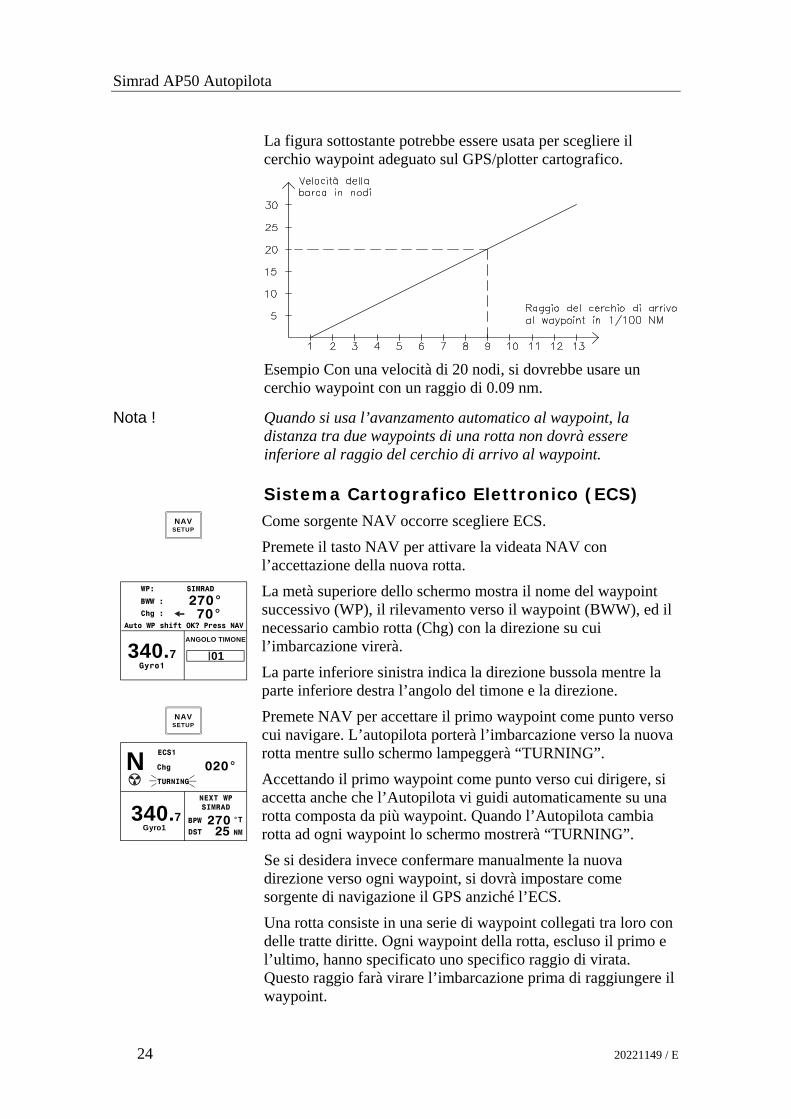
La figura sottostante potrebbe essere usata per scegliere il cerchio waypoint adeguato sul GPS/plotter cartografico.
Esempio Con una velocità di 20 nodi, si dovrebbe usare un cerchio waypoint con un raggio di 0.09 nm.
Nota ! Quando si usa l’avanzamento automatico al waypoint, la distanza tra due waypoints di una rotta non dovrà essere inferiore al raggio del cerchio di arrivo al waypoint.
Sistema Cartografico Elettronico (ECS) NAV
SETUP Come sorgente NAV occorre scegliere ECS. Premete il tasto NAV per attivare la videata NAV con l’accettazione della nuova rotta.
270°
Auto WP shift OK? Press NAV
340.7Gyro1
70°
01
WP: SIMRAD
BWW :
Chg :
ANGOLO TIMONE
La metà superiore dello schermo mostra il nome del waypoint successivo (WP), il rilevamento verso il waypoint (BWW), ed il necessario cambio rotta (Chg) con la direzione su cui l’imbarcazione virerà. La parte inferiore sinistra indica la direzione bussola mentre la parte inferiore destra l’angolo del timone e la direzione.
NAVSETUP
N
340.7Gyro1
020°Chg
ECS1
TURNING
NEXT WPSIMRAD
BPW
DST27025 NM
°T
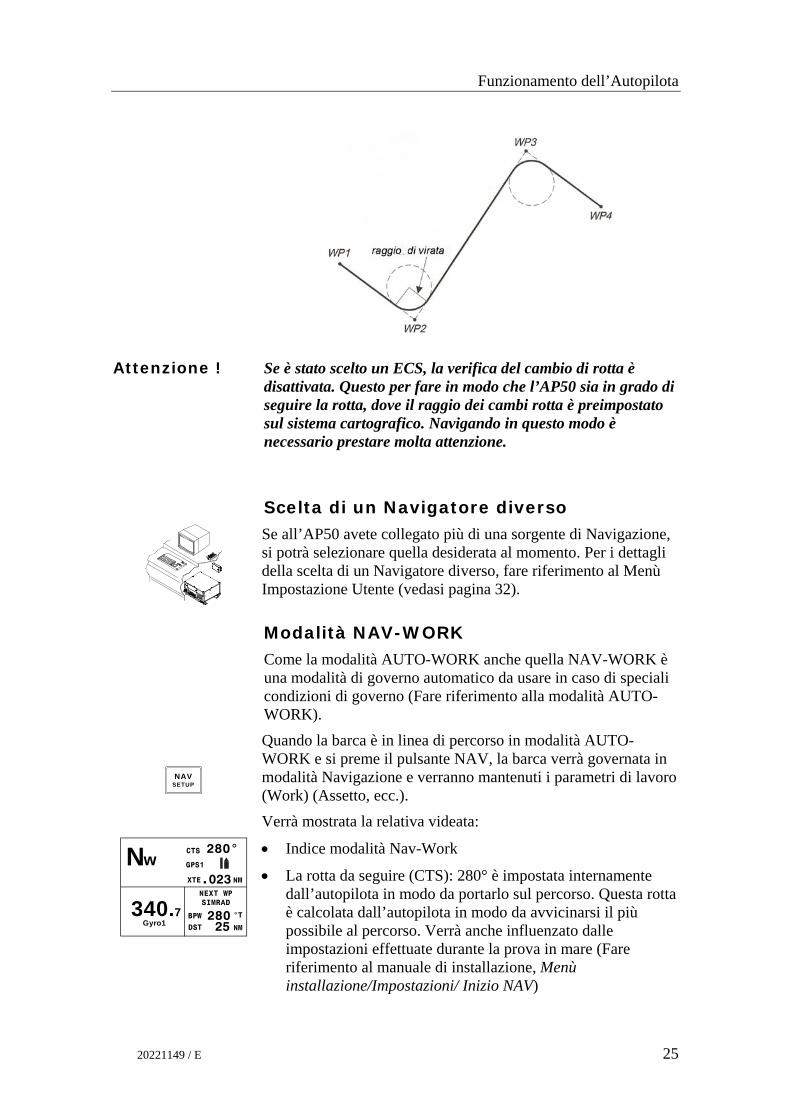
Premete NAV per accettare il primo waypoint come punto verso cui navigare. L’autopilota porterà l’imbarcazione verso la nuova rotta mentre sullo schermo lampeggerà “TURNING”. Accettando il primo waypoint come punto verso cui dirigere, si accetta anche che l’Autopilota vi guidi automaticamente su una rotta composta da più waypoint. Quando l’Autopilota cambia rotta ad ogni waypoint lo schermo mostrerà “TURNING”. Se si desidera invece confermare manualmente la nuova direzione verso ogni waypoint, si dovrà impostare come sorgente di navigazione il GPS anziché l’ECS. Una rotta consiste in una serie di waypoint collegati tra loro con delle tratte diritte. Ogni waypoint della rotta, escluso il primo e l’ultimo, hanno specificato uno specifico raggio di virata. Questo raggio farà virare l’imbarcazione prima di raggiungere il waypoint.
Funzionamento dell’Autopilota
20221149 / E 25
Attenzione ! Se è stato scelto un ECS, la verifica del cambio di rotta è disattivata. Questo per fare in modo che l’AP50 sia in grado di seguire la rotta, dove il raggio dei cambi rotta è preimpostato sul sistema cartografico. Navigando in questo modo è necessario prestare molta attenzione.
Scelta di un Navigatore diverso
Se all’AP50 avete collegato più di una sorgente di Navigazione, si potrà selezionare quella desiderata al momento. Per i dettagli della scelta di un Navigatore diverso, fare riferimento al Menù Impostazione Utente (vedasi pagina 32).
Modalità NAV-WORK Come la modalità AUTO-WORK anche quella NAV-WORK è una modalità di governo automatico da usare in caso di speciali condizioni di governo (Fare riferimento alla modalità AUTO-WORK).
NAVSETUP
Quando la barca è in linea di percorso in modalità AUTO-WORK e si preme il pulsante NAV, la barca verrà governata in modalità Navigazione e verranno mantenuti i parametri di lavoro (Work) (Assetto, ecc.). Verrà mostrata la relativa videata:
Nw
340.7Gyro1
280°GPS1
CTS
XTE.023NM
NEXT WPSIMRAD
BPW
DST28025 NM
°T
• Indice modalità Nav-Work
• La rotta da seguire (CTS): 280° è impostata internamente dall’autopilota in modo da portarlo sul percorso. Questa rotta è calcolata dall’autopilota in modo da avvicinarsi il più possibile al percorso. Verrà anche influenzato dalle impostazioni effettuate durante la prova in mare (Fare riferimento al manuale di installazione, Menù installazione/Impostazioni/ Inizio NAV)

Simrad AP50 Autopilota
26 20221149 / E
• Fonte di navigazione: GPS1. L’imbarcazione è spostata a destra del percorso.
• Errore di Spostamento Laterale: 0.023 miglia nautiche.
• Rotta bussola della girobussola1: 340.7°
• Waypoint successivo: Simrad
• Rilevamento dall’attuale posizione al prossimo waypoint (BPW): 280° (Vero)
• Distanza dal waypoint: 25 miglia nautiche Se si preferisse avere il completo controllo manuale dell’assetto del timone nella modalità Nav-Work, l’assetto automatico potrà essere disattivato permanentemente nel menù di installazione (Fare riferimento al Manuale di installazione, Menù d’installazione/Impostazioni/Assetto automatico).
AVVISO ! In modalità Nav-Work l’allarme di Fuori Rotta è disattivato permanentemente.
Funzionamento dell’Autopilota
20221149 / E 27
2.9 Scansata
Scansata in modalità Auto
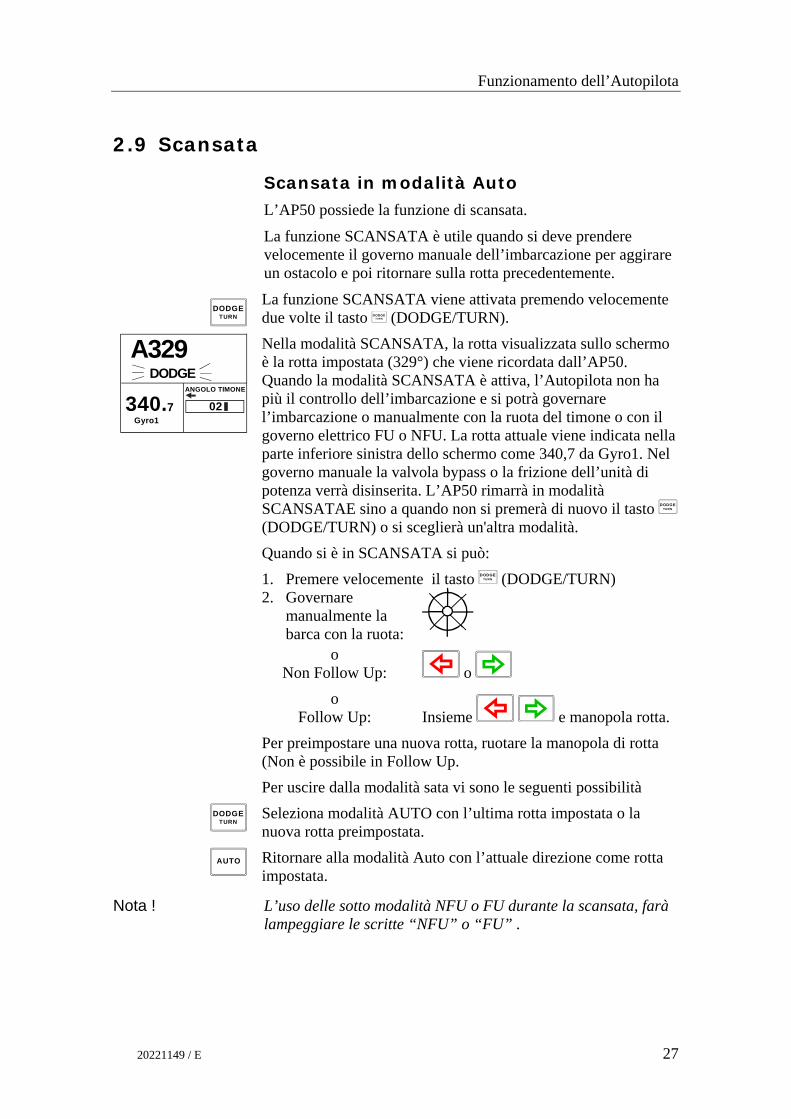
L’AP50 possiede la funzione di scansata.
La funzione SCANSATA è utile quando si deve prendere velocemente il governo manuale dell’imbarcazione per aggirare un ostacolo e poi ritornare sulla rotta precedentemente.
DODGETURN
La funzione SCANSATA viene attivata premendo velocemente due volte il tasto DODGE
TURN (DODGE/TURN).
DODGE
340.7Gyro1
02
A329ANGOLO TIMONE
Nella modalità SCANSATA, la rotta visualizzata sullo schermo è la rotta impostata (329°) che viene ricordata dall’AP50. Quando la modalità SCANSATA è attiva, l’Autopilota non ha più il controllo dell’imbarcazione e si potrà governare l’imbarcazione o manualmente con la ruota del timone o con il governo elettrico FU o NFU. La rotta attuale viene indicata nella parte inferiore sinistra dello schermo come 340,7 da Gyro1. Nel governo manuale la valvola bypass o la frizione dell’unità di potenza verrà disinserita. L’AP50 rimarrà in modalità SCANSATAE sino a quando non si premerà di nuovo il tasto DODGE
TURN (DODGE/TURN) o si sceglierà un'altra modalità. Quando si è in SCANSATA si può: 1. Premere velocemente il tasto DODGE
TURN (DODGE/TURN) 2. Governare
manualmente la barca con la ruota:
o Non Follow Up: o
o Follow Up: Insieme e manopola rotta.
Per preimpostare una nuova rotta, ruotare la manopola di rotta (Non è possibile in Follow Up. Per uscire dalla modalità sata vi sono le seguenti possibilità
DODGETURN
Seleziona modalità AUTO con l’ultima rotta impostata o la nuova rotta preimpostata.
AUTO
Ritornare alla modalità Auto con l’attuale direzione come rotta impostata.
Nota ! L’uso delle sotto modalità NFU o FU durante la scansata, farà lampeggiare le scritte “NFU” o “FU” .
Simrad AP50 Autopilota
28 20221149 / E
Scansata in modalità NAV
DODGETURN
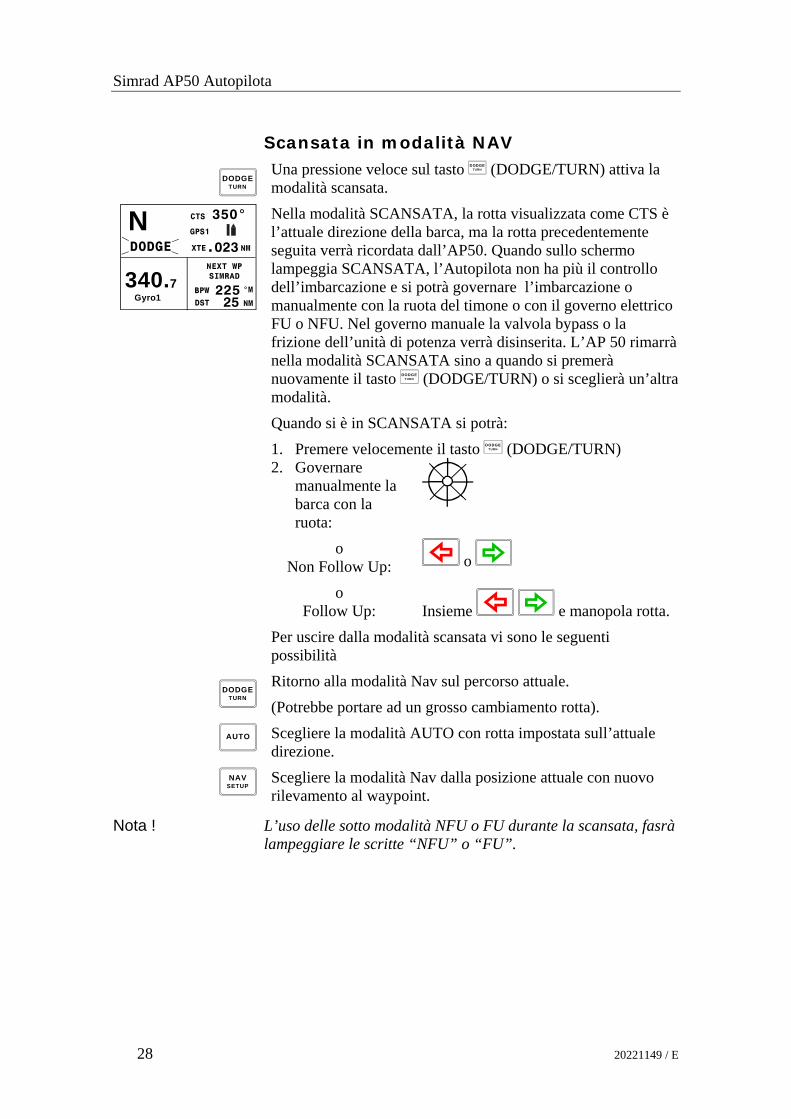
Una pressione veloce sul tasto DODGETURN (DODGE/TURN) attiva la
modalità scansata.
DODGE
340.7Gyro1
NNEXT WPSIMRAD
350°GPS1
CTS
XTE.023NM
BPW
DST225
NM
°M
25
Nella modalità SCANSATA, la rotta visualizzata come CTS è l’attuale direzione della barca, ma la rotta precedentemente seguita verrà ricordata dall’AP50. Quando sullo schermo lampeggia SCANSATA, l’Autopilota non ha più il controllo dell’imbarcazione e si potrà governare l’imbarcazione o manualmente con la ruota del timone o con il governo elettrico FU o NFU. Nel governo manuale la valvola bypass o la frizione dell’unità di potenza verrà disinserita. L’AP 50 rimarrà nella modalità SCANSATA sino a quando si premerà nuovamente il tasto DODGE
TURN (DODGE/TURN) o si sceglierà un’altra modalità. Quando si è in SCANSATA si potrà: 1. Premere velocemente il tasto DODGE
TURN (DODGE/TURN) 2. Governare
manualmente la barca con la ruota:
o Non Follow Up: o
o Follow Up: Insieme e manopola rotta.
Per uscire dalla modalità scansata vi sono le seguenti possibilità
DODGETURN
Ritorno alla modalità Nav sul percorso attuale. (Potrebbe portare ad un grosso cambiamento rotta).
AUTO
Scegliere la modalità AUTO con rotta impostata sull’attuale direzione.
NAVSETUP
Scegliere la modalità Nav dalla posizione attuale con nuovo rilevamento al waypoint.
Nota ! L’uso delle sotto modalità NFU o FU durante la scansata, fasrà lampeggiare le scritte “NFU” o “FU”.
Funzionamento dell’Autopilota
20221149 / E 29
2.10 Modalità VIRATA
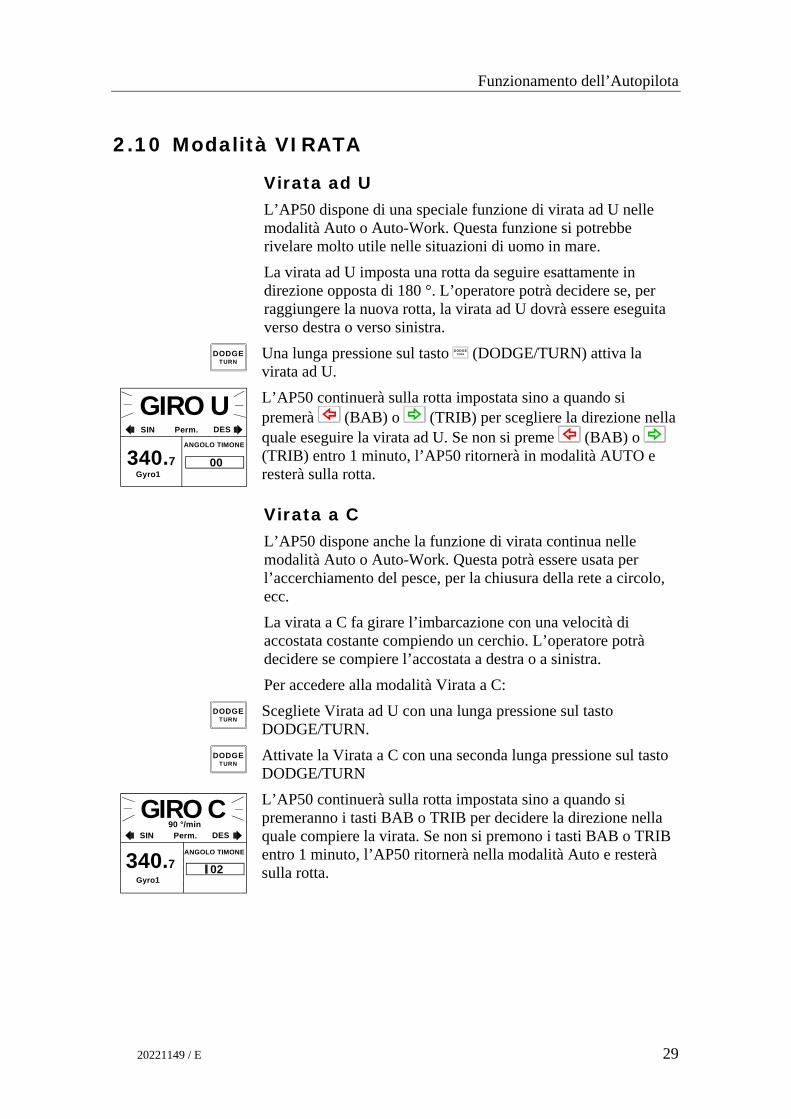
Virata ad U L’AP50 dispone di una speciale funzione di virata ad U nelle modalità Auto o Auto-Work. Questa funzione si potrebbe rivelare molto utile nelle situazioni di uomo in mare. La virata ad U imposta una rotta da seguire esattamente in direzione opposta di 180 °. L’operatore potrà decidere se, per raggiungere la nuova rotta, la virata ad U dovrà essere eseguita verso destra o verso sinistra.
DODGETURN
Una lunga pressione sul tasto DODGETURN (DODGE/TURN) attiva la
virata ad U.
00
GIRO UPerm.SIN DES
340.7Gyro1
ANGOLO TIMONE
L’AP50 continuerà sulla rotta impostata sino a quando si premerà (BAB) o (TRIB) per scegliere la direzione nella quale eseguire la virata ad U. Se non si preme (BAB) o (TRIB) entro 1 minuto, l’AP50 ritornerà in modalità AUTO e resterà sulla rotta.
Virata a C L’AP50 dispone anche la funzione di virata continua nelle modalità Auto o Auto-Work. Questa potrà essere usata per l’accerchiamento del pesce, per la chiusura della rete a circolo, ecc. La virata a C fa girare l’imbarcazione con una velocità di accostata costante compiendo un cerchio. L’operatore potrà decidere se compiere l’accostata a destra o a sinistra. Per accedere alla modalità Virata a C:
DODGETURN
Scegliete Virata ad U con una lunga pressione sul tasto DODGE/TURN.
DODGETURN
Attivate la Virata a C con una seconda lunga pressione sul tasto DODGE/TURN
S345GIRO C90 °/min
340.7Gyro1
02ANGOLO TIMONE
Perm.SIN DES
L’AP50 continuerà sulla rotta impostata sino a quando si premeranno i tasti BAB o TRIB per decidere la direzione nella quale compiere la virata. Se non si premono i tasti BAB o TRIB entro 1 minuto, l’AP50 ritornerà nella modalità Auto e resterà sulla rotta.
Simrad AP50 Autopilota
30 20221149 / E
S345GIRO C90 °/min
340.7Gyro1
05ANGOLO TIMONE
DES
Imbarcazione che
vira a destra
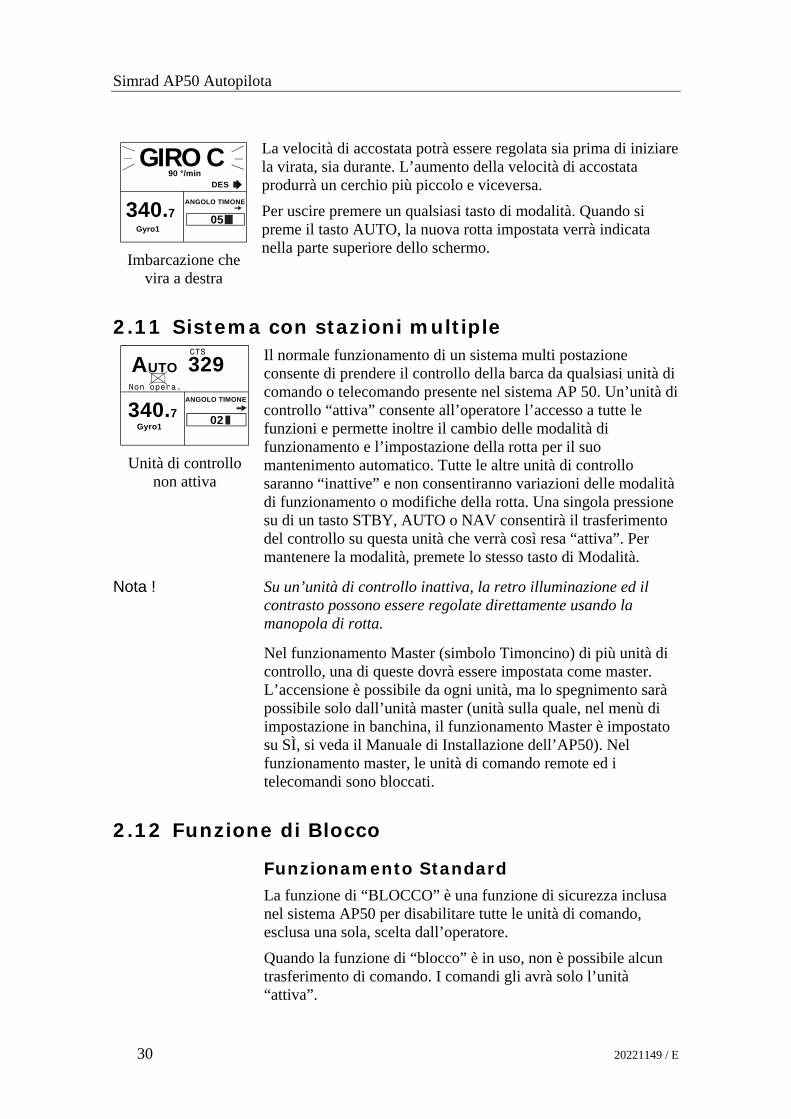
La velocità di accostata potrà essere regolata sia prima di iniziare la virata, sia durante. L’aumento della velocità di accostata produrrà un cerchio più piccolo e viceversa. Per uscire premere un qualsiasi tasto di modalità. Quando si preme il tasto AUTO, la nuova rotta impostata verrà indicata nella parte superiore dello schermo.
2.11 Sistema con stazioni multiple
02340.7Gyro1
AUTONon opera.
329CTS
ANGOLO TIMONE
Unità di controllo
non attiva
Il normale funzionamento di un sistema multi postazione consente di prendere il controllo della barca da qualsiasi unità di comando o telecomando presente nel sistema AP 50. Un’unità di controllo “attiva” consente all’operatore l’accesso a tutte le funzioni e permette inoltre il cambio delle modalità di funzionamento e l’impostazione della rotta per il suo mantenimento automatico. Tutte le altre unità di controllo saranno “inattive” e non consentiranno variazioni delle modalità di funzionamento o modifiche della rotta. Una singola pressione su di un tasto STBY, AUTO o NAV consentirà il trasferimento del controllo su questa unità che verrà così resa “attiva”. Per mantenere la modalità, premete lo stesso tasto di Modalità.
Nota ! Su un’unità di controllo inattiva, la retro illuminazione ed il contrasto possono essere regolate direttamente usando la manopola di rotta.
Nel funzionamento Master (simbolo Timoncino) di più unità di controllo, una di queste dovrà essere impostata come master. L’accensione è possibile da ogni unità, ma lo spegnimento sarà possibile solo dall’unità master (unità sulla quale, nel menù di impostazione in banchina, il funzionamento Master è impostato su SÌ, si veda il Manuale di Installazione dell’AP50). Nel funzionamento master, le unità di comando remote ed i telecomandi sono bloccati.
2.12 Funzione di Blocco
Funzionamento Standard La funzione di “BLOCCO” è una funzione di sicurezza inclusa nel sistema AP50 per disabilitare tutte le unità di comando, esclusa una sola, scelta dall’operatore. Quando la funzione di “blocco” è in uso, non è possibile alcun trasferimento di comando. I comandi gli avrà solo l’unità “attiva”.
Funzionamento dell’Autopilota
20221149 / E 31
Nota ! Su un’unità di Controllo bloccata, la retro illuminazione ed il contrasto possono essere regolati direttamente con la manopola di rotta.
STBYSTBY
Per inserire la funzione di “blocco”, premere rapidamente due volte il tasto STBY (STBY).
02
340.7Gyro1
ANGOLO TIMONE
Lo schermo dell’unità di comando “attiva” mostrerà dapprima l’icona di una singola chiave seguita poi dalla videata principale sul quale l’icona si alternerà con l’indice di modalità (non quando verrà selezionata come stazione Master). Le unità di comando del sistema “bloccate” indicheranno:
02
340.7Gyro1
STBY
Non opera.
ANGOLO TIMONE
La funzione di “Blocco” viene eliminata con le seguenti azioni:
• Premendo due volte sul tasto STBY dell’unità di comando “attiva”.
• Spegnendo il sistema tenendo premuto per 3 secondi il tasto STBY di ogni unità di comando del sistema.
Dopo aver sbloccato le altre unità di comando, sullo schermo dell’unità attiva comparirà questo simbolo prima di ritornare al funzionamento normale. Tutte le altre unità ritorneranno allo stato “inattiva”
Funzionamento Master
02
340.7Gyro1
STBY
Non opera.
ANGOLO TIMONE
Unità Remota
bloccata
02
340.7Gyro1
STBY
ANGOLO TIMONE
Nel funzionamento Master (Simbolo Timoncino), tutte le unità remote sono bloccate all’accensione. Su tutti gli schermi remoti comparirà il simbolo della chiave.
Premendo rapidamente due volte sul tasto STBY (STBY) dell’unità master, si abilitano le unità remote. Questo è indicato sull’unità master dall’icona della chiave con sopra una croce lampeggiante mentre sulle unità remote l’icona della chiave scomparirà. L’unità remota attivata per prima assumerà il comando. Se l’unità remota attivata avesse uno schermo, su esso comparirà l’icona della chiave e le altre unità saranno bloccate. Se l’unità remota attivata non avesse uno schermo (R3000X, FU50, S35, JS10), sarà possibile usare tutte le altre unità remote fino a quando non verrà impiegata una unità con schermo. Dopo di che tutte le altre unità verranno bloccate. Per “riaprire” le unità remote bloccate, si dovrà riprendere il comando dall’unità master e premere nuovamente velocemente due volte sul tasto STBY (STBY) dell’unità master.

Simrad AP50 Autopilota
32 20221149 / E
2.13 Selezione esterna del Sistema
02
340.7Gyro1
Disengaged
ANGOLO TIMONE
Per passare dalla modalità di governo automatico a quella manuale, e viceversa, è possibile usare un selettore esterno del sistema (fare riferimento alla risoluzione IMO MSC.64 sec.4). Il selettore deve indicare in maniera adeguata quale metodo di governo è attivo in quel dato momento. Quando viene scelto il governo manuale, l’AP50 verrà staccato dal sistema di governo dell’imbarcazione ed sullo schermo comparirà “Sganciato” (sul FU50 non verrà accesa alcuna luce di modalità). Quando verrà scelto il Governo Automatico, l’ AP50 passerà nella modalità AUTO (o AUTO-WORK). Per il collegamento del selettore esterno del sistema, fare riferimento a “Selezione Sistema ”. Si veda il Manuale d’installazione.
2.14 Menu Impostazione Utente
NAVSETUPNAV
SETUP
Nell’AP50, ogni modalità (STBY, AUTO e NAV) ha un proprio menù di impostazione per l’utente con parametri modificabili. Si potrà facilmente accedere al menù di impostazione con una doppia pressione veloce sul tasto NAV
SETUP (NAV) dalla modalità nel quale ci si trova. Scorrere le voci del menù con i tasti Babordo e Tribordo. Usare la manopola per cambiare i valori.
Nota ! Per informazioni più dettagliate sulle varie voci del Menù di Impostazione utente si potranno trovare nei capitoli 3 e 4 del Manuiale di installazione dell’AP50.
Icona lampeggiante manopola di rotta
Quando viene usata la manopola di rotta per le impostazioni nel menù impostazione utente ecc., sullo schermo lampeggerà una icona per avvisare che non verranno eseguiti cambiamenti di rotta se non si premerà il tasto AUTO (AUTO).
Modalità Standby
340.7Gyro1
Muovi : ,Regola :
LuminositaContrastoFunz. di governo TimoneVelocita man 04.9ktSolcometro LogBussola Gyro1Bussola sec. Flux1Riferim. NAV GPS1
IMPOSTAZIONE
Retroilluminazione Regola la retroilluminazione di schermo e tasti. (10 livelli – il 10 è più luminoso). L’impostazione verrà salvata spegnendo l’autopilota e verrà richiamata all’accensione. La regolazione ha effetto locale sulla sola unità sulla quale si sta operando. Contrasto Regola il contrasto dello schermo (10 livelli). L’impostazione verrà salvata spegnendo l’autopilota e verrà richiamata all’accensione.

Funzionamento dell’Autopilota
20221149 / E 33
La regolazione è locale. Ad alte temperature non tutti i livelli saranno disponibili a causa della compensazione automatica. Funzioni di governo (disponibile solo se il propulsore è stato selezionato nel menù di Installazione in banchina) Scegliere tra le funzioni di governo indicate: L’imbarcazione verrà governata dal timone, dal propulsore o dalla combinazione di timone e propulsore a seconda della modalità scelta. Velocità (man, log, SOG) L’AP50 va adattato alla velocità dell’imbarcazione e questa impostazione dovrà essere regolata di conseguenza. Se non è collegata alcuna fonte di velocità, i dati di velocità potranno essere impostati manualmente con la manopola.(1–70 nodi) Se sono presenti dati esterni di velocità, verranno indicati sia la fonte, sia la velocità attuale. Se i dati di velocità esterni venissero persi, dopo 15 secondi scatterà un allarme e la velocità verrà impostata su manuale e con il valore dell’ultima lettura. Se i dati di velocità esterni ritornassero disponibili, l’AP50 li utilizzerà nuovamente in modalità automatica. Fonte di velocità Scegliere la fonte di velocità. Se non fosse presente alcuna fonte di velocità esterna, impostarla su Man e regolare manualmente il valore della velocità come indicato sopra. Bussola di Governo Scegliere la bussola da usare per il governo. Bussola Secondaria Scegliere la bussola da usare come controllo, se più di una bussola fosse collegata al sistema. Fonte di navigazione Scegliere la fonte per i dati di navigazione.
Modalità Auto
341°CTS
340.7Gyro1
IMPOSTAZIONEA Muovi : ,Regola :
LuminositaContrastoFunz. di governo TimoneStato mare AUTOTimone 0.50C.timone 1.40
Oltre
Retroilluminazione Come per la modalità Standby. Contrasto Come per la modalità Standby.
Simrad AP50 Autopilota
34 20221149 / E
Funzioni di Governo (disponibili solo se il propulsore è stato selezionato nel menù di Installazione in banchina, si veda il manuale di installazione dell’AP50). Come per la modalità Standby Stato del mare Lo stato del mare determina la quantità in gradi di cui l’imbarcazione può scostarsi dalla rotta impostata prima che venga attivato il timone. Scegliere il valore del Filtro Stato del Mare OFF: Fornisce un governo preciso ma aumenta l’attività
del timone. AUTO: Riduce automaticamente l’attività del timone e la
sensibilità dell’autopilota con mare mosso. MANUAL: Impostate la banda di oscillazione manualmente
(MAN 1 - MAN 10, 10 ≈ ±6°). L’impostazione determina di quanti gradi l’imbarcazione può scostarsi dalla rotta impostata prima che venga attivato il timone. Con mare calmo si dovrebbe impostare su OFF in quanto teoricamente il pilota non dovrebbe consentire alcuna deviazione dalla rotta impostata. Il valore di Filtro Stato del Mare dovrebbe aumentare con l’aumentare della forza del mare. Questo provocherà una diminuzione della sensibilità in modo che l’imbarcazione possa deviare dalla rotta del numero di gradi fissato dal valore del Filtro Stato del Mare, prima che venga attivato il timone. L’entità del timone verrà calcolata dall’errore di rotta oltre i limiti impostati, moltiplicato per il fattore p. Ciò eviterà grossi interventi del timone e ne ridurrà l’attività.
Nota ! In condizioni dove si richiede un governo attivo, come con mare in poppa, il valore dovrebbe essere ridotto.
Timone Si imposta il guadagno del timone, che è il rapporto tra l’angolo comandato e l’errore di rotta (Fattore p). Il valore preimpostato dipende dalla lunghezza dell’imbarcazione. Il valore verrà fissato durante la Prova in Mare, ma lo si potrà facilmente regolare nel menù di impostazione. Contro Timone Il Contro Timone è il parametro che contrasta l’effetto della velocità di virata dell’imbarcazione e la sua inerzia. Il valore preimpostato dipende dalla lunghezza dell’imbarcazione. Tale
Funzionamento dell’Autopilota
20221149 / E 35
valore verrà fissato durante la Prova in Mare, ma lo si potrà facilmente regolare nel menù di impostazione.
341°CTS
340.7Gyro1
IMPOSTAZIONE
Muovi : ,Regola :
Velocita man 04.9ktL. All F. Rotta 10°
Modo virata ROTVel. virata 240°/minPropulsore sens 00°
AOltre
Velocità (man, log, SOG) Come per la modalità Standby
Limite di Fuori Rotta Imposta la soglia dell’allarme di Fuori Rotta. L’allarme si verifica quando la deviazione dalla rotta impostata supererà il limite impostato. Il valore di preimpostato è 10°. Scala 3-35°. Modalità virata Sceglie tra governo con Velocità di Virata (ROT) o governo con Raggio. La preimpostazione è su ROT. ROT/RAD Imposta il valore per la modalità di virata scelta. Scala della Velocità di Virata: 5°/min – 720°/min. Scala del raggio: 0.01 – 0.99 Mn. Il valore verrà fissato durante la Prova in Mare, ma lo si potrà facilmente regolare nel menù di impostazione. Sensibilità Propulsore (disponibile solo se nel Menù di Installazione in Banchina è stato impostato Propulsore). La sensibilità del propulsore (propulsore) determina di quanti gradi l’imbarcazione può deviare dalla rotta impostata prima che venga attivato il propulsore. Appena l’imbarcazione si allontana dalla sua rotta, il propulsore la riporterà indietro. Un valore alto ridurrà l’attività del propulsore ed allungherà la vita di funzionamento dei propulsori di tipo On/Off. Se i comandi al propulsore si alternassero continuamente da lato a lato, ciò potrebbe significare che il valore di Sensibilità Propulsore impostato è troppo basso. Se si rendesse necessario un valore di Sensibilità Propulsore più basso, per evitare il penzolamento, prendere in considerazione la riduzione del Guadagno Propulsore. Scala: Propulsore continuo da 0° a 30° in passi di 1°
Propulsore On/off da 3° a 30° in passi di 1°. Impostazione di base: 1° per propulsori continui, 5° per propulsori On/Off.
Simrad AP50 Autopilota
36 20221149 / E
Modalità Auto-Work NAV
SETUPNAVSETUP
Per entrare nel menù impostazioni quando si è in modalità Auto-Work, premere due volte velocemente il tasto NAV.
341°CTS
Aw
340.7Gyro1
IMPOSTAZIONE
Muovi : ,Regola :
LuminositaContrastoFunz. di governo TimoneW Stato mare AUTOW Timone 0.50W C.timone 1.40
Oltre
Il menù impostazioni per l’Auto-Work è identico a quello della modalità Auto, ma si avrà la possibilità di scegliere valori separati di Filtro Stato del Mare, Timone, Contro Timone e Velocità di Virata/Raggio per la modalità Auto-Work. Usare i pulsanti Destra/Sinistra per spostare il cursore e la manopola per cambiare il valore. Questi valori verranno salvati nella memoria dell’AP50 e verranno richiamati all’inserimento della modalità Auto-Work.
341°CTS
Aw
340.7Gyro1 Oltre
IMPOSTAZIONE
Muovi : ,Regola :
Assetto S01°Velocita man 04.9kt
Modo virata ROTW Vel. virata 240°/minPropulsore sens 0.1°
Usare la manopola per regolare, se necessario, il valore di assetto. L’assetto (trim) manuale aiuta l’assetto automatico che ha bisogno di tempo per calcolare la compensazione appropriata del timone. Il valore di assetto non viene memorizzato. L’impostazione del Limite di Fuori Rotta non è disponibile in modalità Auto-Work.
Nota ! I valori di Timone e Contro Timone influenzeranno le caratteristiche di governo dell’imbarcazione indipendentemente dalla funzione di governo scelta (timone, propulsore o timone+propulsore).
Modalità Nav
.12NM
340.7Gyro1
NOltre
Muovi : ,Regola :
LuminositaContrastoFunz. di governo TimoneStato mare AUTOTimone 0.50C.timone 1.40
IMPOSTAZIONE
La modalità Nav non funzionerà adeguatamente se prima non sarà stata regolata e trovata soddisfacente la modalità Auto. Retro Illuminazione Come per la modalità Standby Contrasto Come per la modalità Standby Funzioni di Governo Come per la modalità Standby Filtro Stato Mare Come per la modalità AUTO Timone Come per la modalità AUTO Contro Timone Come per la modalità AUTO
Funzionamento dell’Autopilota
20221149 / E 37
340.7Gyro1
N.12NM
Oltre
IMPOSTAZIONE
Muovi : ,Regola :
Velocita man 04.9ktL. All F. Rotta 10°Guad. Navigaz 3.5Modo virata ROTVel. virata 240°/minPropulsore sens 01°
Registro velocità Come per la modalità AUTO Limite Fuori Rotta Come per la modalità AUTO
Guadagno Navigazione Il Guadagno Navigazione è un valore proporzionale che dipende dall’Errore di Spostamento Laterale e determina di quanti gradi l’autopilota deve cambiare la direzione dell’imbarcazione in modo da riportarla sul percorso tracciato. Più alto sarà il valore di Guadagno di Navigazione, maggiore sarà la correzione. Se il valore è impostato troppo basso, l’imbarcazione potrebbe richiedere un tempo molto lungo per raggiungere il percorso. Potrebbe anche scarrocciare in presenza di una forte corrente laterale. Un valore troppo alto causerà un pendolio continuo dell’imbarcazione attorno al percorso. Scala: 0.5-7.0. Il valore di preimpostato dipende dalla lunghezza imbarcazione. Modalità Virata Come per la modalità AUTO ROT/RAD Come per la modalità AUTO Sensibilità Propulsore (Disponibile solo se è stato impostato il propulsore) Come per la modalità AUTO
Modalità Nav-Work NAV
SETUPNAVSETUP
Per entrare nel menù impostazioni quando si è in modalità Nav-Work, premere due volte velocemente il tasto NAV.
Nw
340.7Gyro1
.12NM
Oltre
IMPOSTAZIONE
Muovi : ,Regola :
LuminositaContrastoFunz. di governo TimoneW Stato mare AUTOW Timone 0.50W C.timone 1.40
Il menù impostazioni per Nav-Work è identico a quello della modalità Nav, ma si avrà la possibilità di scegliere valori separati di Filtro Stato del Mare, Timone, Contro Timone e Velocità di Virata/Raggio per la modalità Nav-Work. Usare i pulsanti Destra/Sinistra per spostare il cursore e la manopola per cambiare il valore. Questi valori verranno salvati nella memoria dell’AP50 e verranno richiamati all’inserimento della modalità Nav-Work.
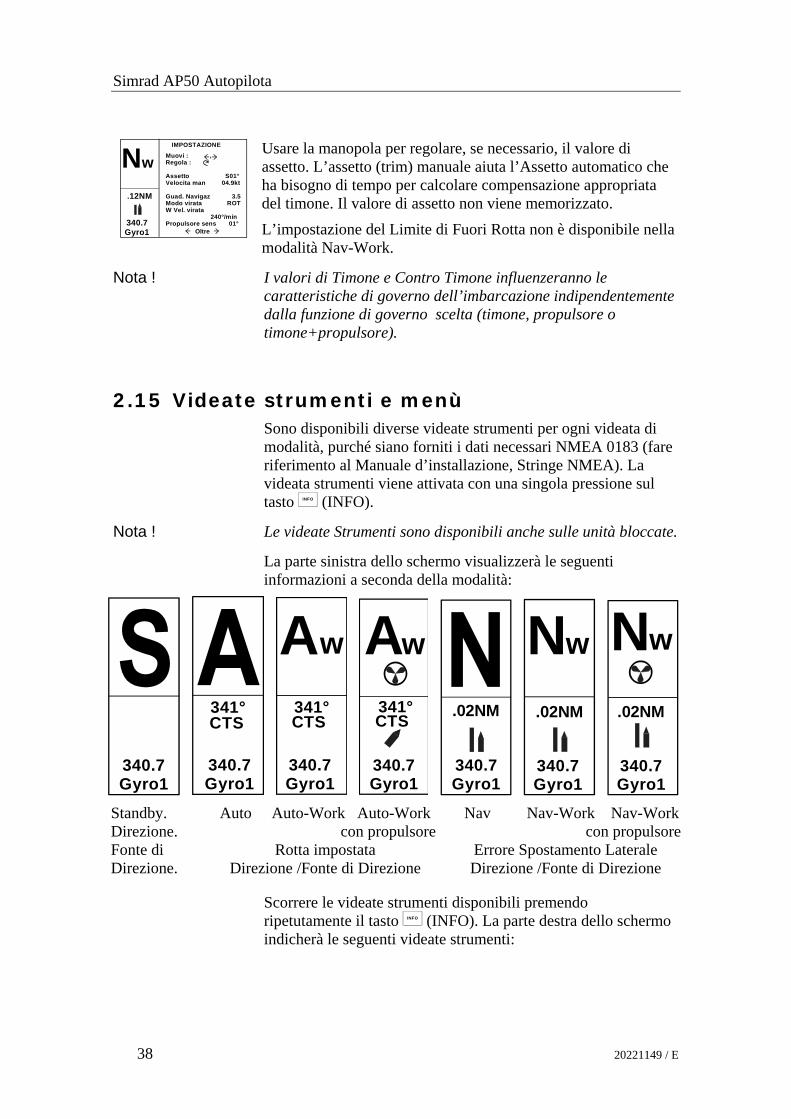
Simrad AP50 Autopilota
38 20221149 / E
Nw
340.7Gyro1
.12NM
Oltre
IMPOSTAZIONE
Muovi : ,Regola :
Assetto S01°Velocita man 04.9kt
Guad. Navigaz 3.5Modo virata ROTW Vel. virata 240°/minPropulsore sens 01°
Usare la manopola per regolare, se necessario, il valore di assetto. L’assetto (trim) manuale aiuta l’Assetto automatico che ha bisogno di tempo per calcolare compensazione appropriata del timone. Il valore di assetto non viene memorizzato. L’impostazione del Limite di Fuori Rotta non è disponibile nella modalità Nav-Work.
Nota ! I valori di Timone e Contro Timone influenzeranno le caratteristiche di governo dell’imbarcazione indipendentemente dalla funzione di governo scelta (timone, propulsore o timone+propulsore).
2.15 Videate strumenti e menù Sono disponibili diverse videate strumenti per ogni videata di modalità, purché siano forniti i dati necessari NMEA 0183 (fare riferimento al Manuale d’installazione, Stringe NMEA). La videata strumenti viene attivata con una singola pressione sul tasto INFO (INFO).
Nota ! Le videate Strumenti sono disponibili anche sulle unità bloccate.
La parte sinistra dello schermo visualizzerà le seguenti informazioni a seconda della modalità:
340.7Gyro1
341°
340.7Gyro1
CTS
341°
Aw
340.7Gyro1
CTS
341°
Aw
340.7Gyro1
CTS
.02NM
340.7Gyro1
Nw
.02NM
340.7Gyro1
.02NM
Nw
340.7Gyro1
Standby. Direzione. Fonte di Direzione.
Auto Auto-Work Auto-Work con propulsore
Rotta impostata Direzione /Fonte di Direzione
Nav Nav-Work Nav-Work con propulsore
Errore Spostamento Laterale Direzione /Fonte di Direzione
Scorrere le videate strumenti disponibili premendo ripetutamente il tasto INFO (INFO). La parte destra dello schermo indicherà le seguenti videate strumenti:
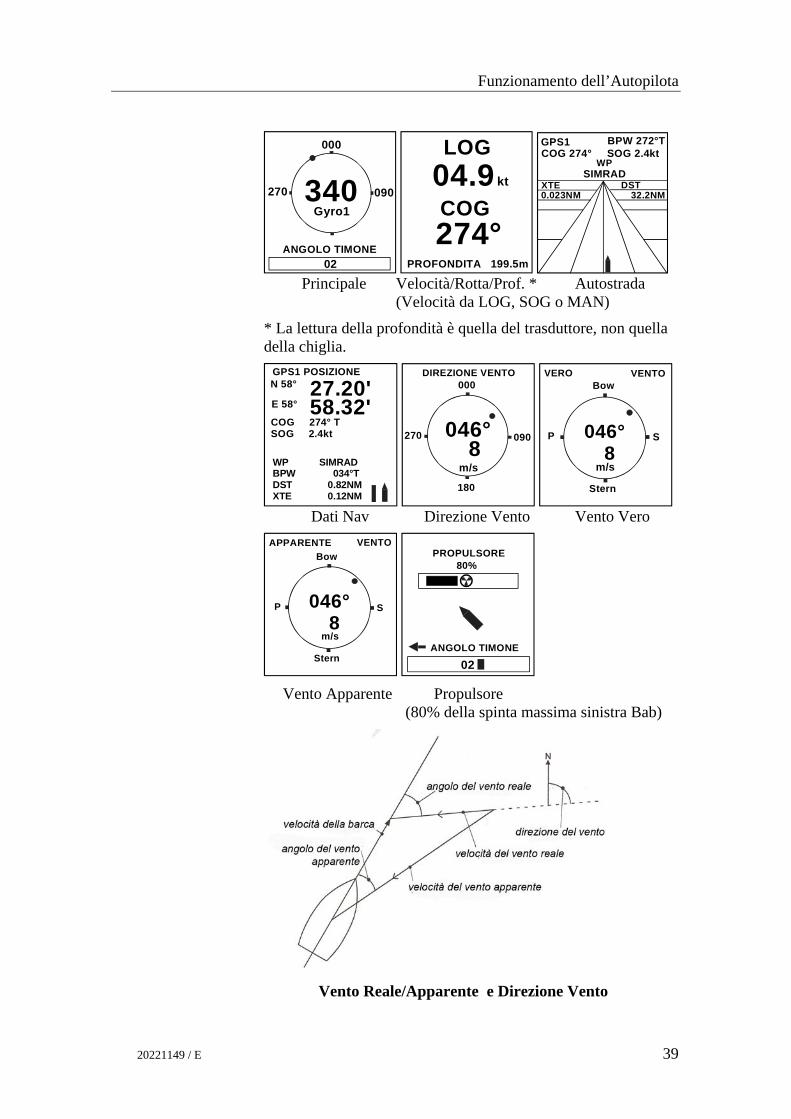
Funzionamento dell’Autopilota
20221149 / E 39
02ANGOLO TIMONE
090270
000
340Gyro1
LOG
COG
PROFONDITA 199.5m
04.9
274°
kt
COG 274° SOG 2.4ktBPW 272°T
SIMRADWP
XTE DST
GPS1
32.2NM0.023NM
Principale Velocità/Rotta/Prof. * Autostrada
(Velocità da LOG, SOG o MAN)
* La lettura della profondità è quella del trasduttore, non quella della chiglia.
N 58° 27.20'E 58° 58.32'COG 274° TSOG 2.4kt
GPS1 POSIZIONE
WP SIMRADBPW 034°TDST 0.82NMXTE 0.12NM
090270
000
046°8
m/s
180
DIREZIONE VENTO
S P
Bow
Stern
VENTOVERO
046°8
m/s
Dati Nav Direzione Vento Vento Vero
S P
Bow
Stern
VENTOAPPARENTE
046°8
m/s
02RUDDER SP
80%PROPULSORE
02ANGOLO TIMONE
Vento Apparente Propulsore
(80% della spinta massima sinistra Bab)
Vento Reale/Apparente e Direzione Vento
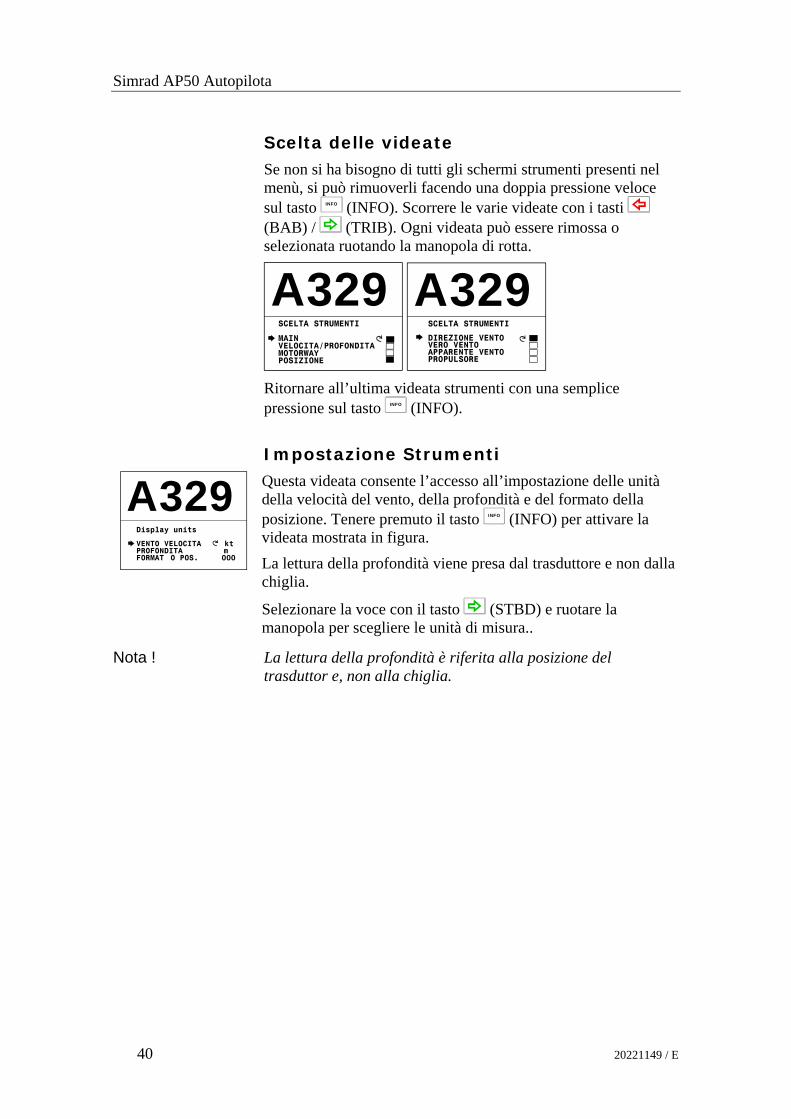
Simrad AP50 Autopilota
40 20221149 / E
Scelta delle videate Se non si ha bisogno di tutti gli schermi strumenti presenti nel menù, si può rimuoverli facendo una doppia pressione veloce sul tasto INFO (INFO). Scorrere le varie videate con i tasti (BAB) / (TRIB). Ogni videata può essere rimossa o selezionata ruotando la manopola di rotta.
A329SCELTA STRUMENTI
MAIN VELOCITA/PROFONDITAMOTORWAYPOSIZIONE
A329SCELTA STRUMENTI
DIREZIONE VENTO VERO VENTOAPPARENTE VENTOPROPULSORE
Ritornare all’ultima videata strumenti con una semplice pressione sul tasto INFO (INFO). Impostazione Strumenti
A329Display units
VENTO VELOCITA ktPROFONDITA mFORMAT O POS. 000
Questa videata consente l’accesso all’impostazione delle unità della velocità del vento, della profondità e del formato della posizione. Tenere premuto il tasto INFO (INFO) per attivare la videata mostrata in figura. La lettura della profondità viene presa dal trasduttore e non dalla chiglia.
Selezionare la voce con il tasto (STBD) e ruotare la manopola per scegliere le unità di misura..
Nota ! La lettura della profondità è riferita alla posizione del trasduttor e, non alla chiglia.
Manutenzione
20221149 / E 41
3 MANUTENZIONE
3.1 Unità di Controllo L’unità di Controllo AP50 impiegata in modo normale richiederà una manutenzione minima in quanto è realizzata in alluminio rivestito, resistente all’acqua marina ed ha un rivestimento di poliestere per resistere alle intemperie nel caso di una installazione esterna. Si raccomanda di tenere l’unità pulita dal sale in quanto, con il tempo, si potrebbe verificare la corrosione. Se fosse necessario pulire lo strumento, usare acqua dolce ed una soluzione di sapone delicato (non un detersivo). E’ importante che si evitino i solventi chimici come la nafta, il petrolio, ecc. Accertarsi che tutti i connettori ROBNET non utilizzati siano chiusi con il tappo in dotazione. Ad ogni inizio di stagione si consiglia di controllare tutte le connessioni sull’unità di controllo e di coprirle con vaselina o WD40.
3.2 Unità di Giunzione Non viene richiesta una particolare manutenzione. All’inizio di stagione è’ consigliabile, comunque, fare una ispezione visiva all’interno e controllare le connessioni.
3.3 Unità di riscontro Fare una ispezione visiva ad intervalli di 2-3 mesi ed all’inizio di ogni stagione. Applicare eventualmente del grasso sullo snodo.
3.4 Bussola (RC25) Se la bussola dell’Autopilota fosse installata all’esterno, fare una ispezione visiva ogni 2-3 mesi ed all’inizio di ogni stagione.
3.5 Unità di Potenza Per le istruzioni di manutenzione fare riferimento al manuale dell’unità di potenza.
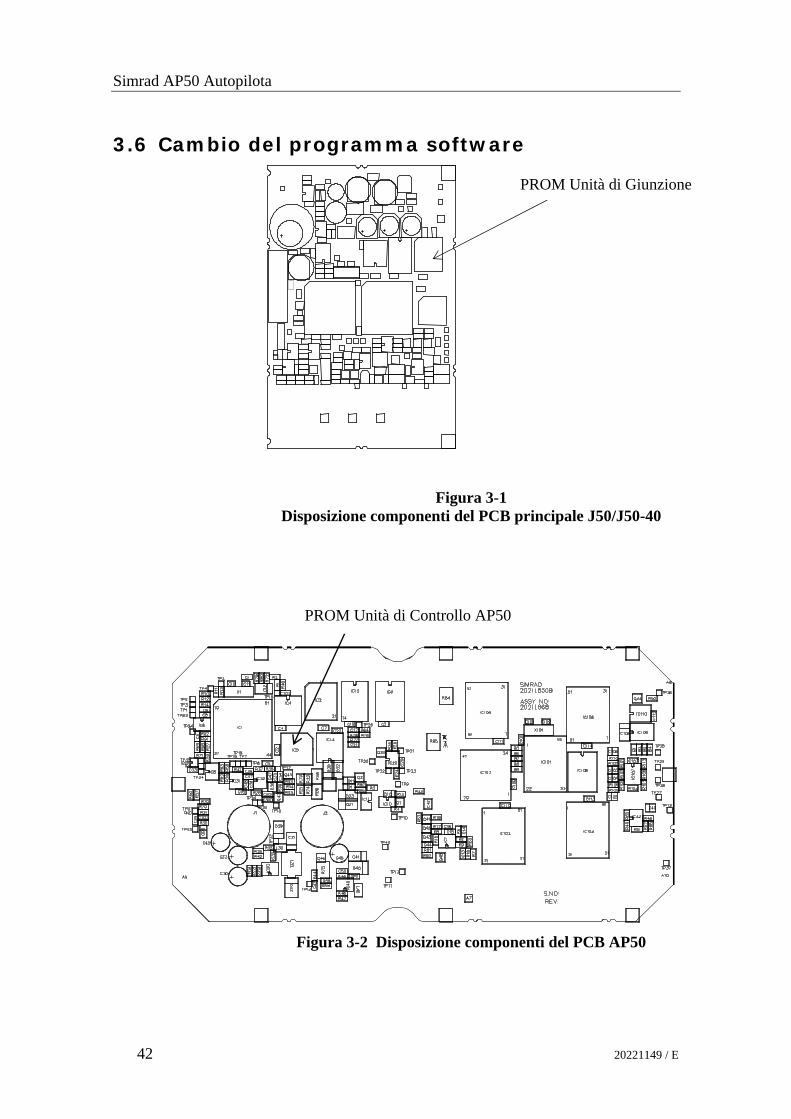
Simrad AP50 Autopilota
42 20221149 / E
3.6 Cambio del programma software
Figura 3-1 Disposizione componenti del PCB principale J50/J50-40
Figura 3-2 Disposizione componenti del PCB AP50
PROM Unità di Giunzione
PROM Unità di Controllo AP50
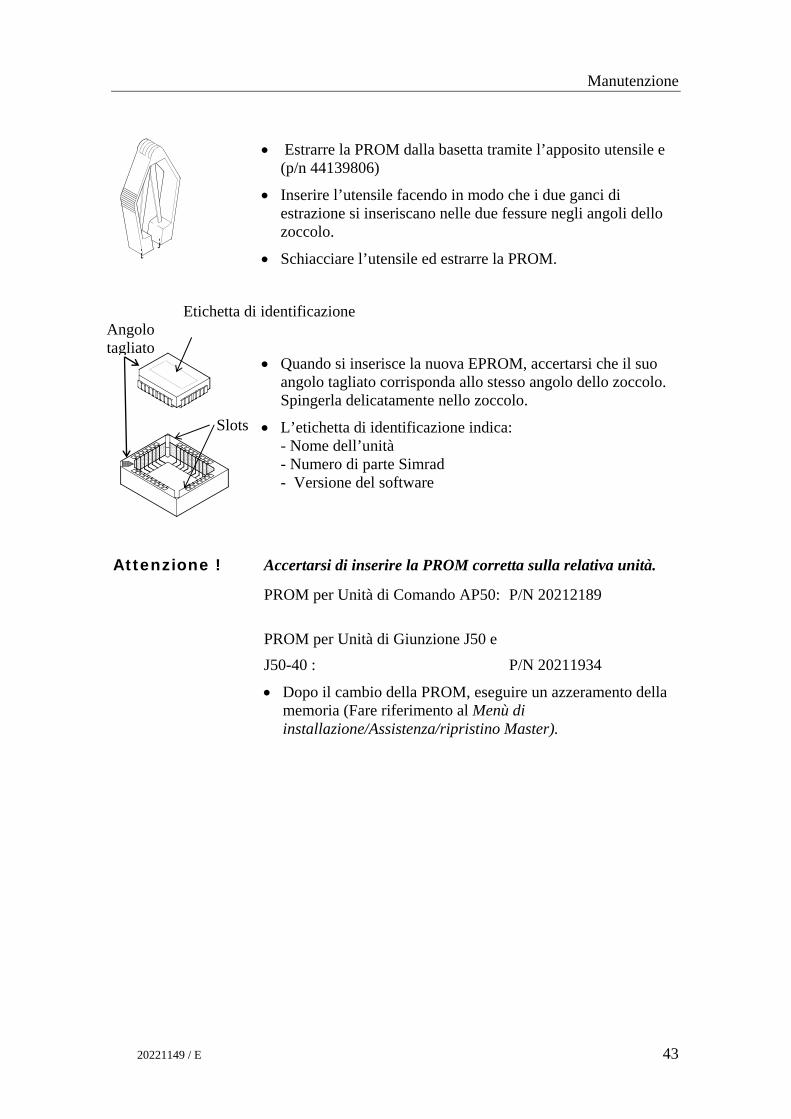
Manutenzione
20221149 / E 43
• Estrarre la PROM dalla basetta tramite l’apposito utensile e (p/n 44139806)
• Inserire l’utensile facendo in modo che i due ganci di estrazione si inseriscano nelle due fessure negli angoli dello zoccolo.
• Schiacciare l’utensile ed estrarre la PROM.
• Quando si inserisce la nuova EPROM, accertarsi che il suo angolo tagliato corrisponda allo stesso angolo dello zoccolo. Spingerla delicatamente nello zoccolo.
• L’etichetta di identificazione indica: - Nome dell’unità - Numero di parte Simrad - Versione del software
Attenzione ! Accertarsi di inserire la PROM corretta sulla relativa unità.
PROM per Unità di Comando AP50: P/N 20212189 PROM per Unità di Giunzione J50 e J50-40 : P/N 20211934
• Dopo il cambio della PROM, eseguire un azzeramento della memoria (Fare riferimento al Menù di installazione/Assistenza/ripristino Master).
Angolo tagliato
Etichetta di identificazione
Slots

Simrad AP50 Autopilota
44 20221149 / E
Questa pagina è stata intenzionalmente lasciata bianca.
Ricerca guasti
20221149 / E 45
4 RICERCA GUASTI Un Autopilota è un sistema complesso il cui buon funzionamento dipende da una corretta installazione e da una positiva prova in mare. In caso di avaria si troverà aiuto nel software dell’AP50 che contenendo diverse funzioni di verifica, consentendo di isolare il probabile guasto. Per ogni avaria rilevata viene fornito un allarme acustico e visivo. L’allarme acustico viene ripristinato premendo un pulsante qualsiasi (Es.: passando da AUTO A STBY). L’allarme visivo continuerà e si alternerà con la videata di normale funzionamento sino a quando l’anomalia non verrà rimossa. Se è installato un cicalino esterno (Fare riferimento al Manuale d’installazione, Allarme esterno) l’allarme esterno scatterà 5 sec. dopo quello interno. Se si volesse cercare di risolvere il problema da soli, fare riferimento alla tabella che segue per i consigli pratici. Tuttavia, la maggior parte dei problemi richiederà l’intervento del concessionario Simrad. Eseguire gli interventi di riparazione come da tabella sottostante.
Nota ! Per il sistema AP50 Plus, le schede J50 si trovano all’interno della unità di distribuzione JD5Xt.
Nota ! Gli allarmi di ‘Scostamento Bussola, ‘Imbarcazione Fuori Rotta, e ‘Limite Timone si azzerano automaticamente quando l’errore rientra nei valori.
4.1 Allarmi
Lettura schermo Guasto probabile Azione raccomandata
P00 M00 S000SW V1R1J300XSimrad
Se all’accensione compare la videata di stato J300X/J3000X, la procedura di avvio verrà bloccata ad indicare che l’installazione dell’unità di giunzione non corretta
Installate l’unità di giunzione J50 o l’Unità di Distribuzione JD5X.
Allarmi avaria di sistema: Avaria Unità di Riscontro (Autopilota funziona in modo simulato e sullo schermo compare l’angolo di riscontro simulato)
Segnale di riscontro assente o errato. Timone analogico non installato. Per il sistema AP50 Plus fare riferimento anche al capitolo ricerca guasti del Manuale d’installazione.
1. Controllate i collegamenti 2. Controllare l’allineamento come
da istruzioni di installazione 3. Sostituite l’unità Feedback 4. Installare il timone analogico.
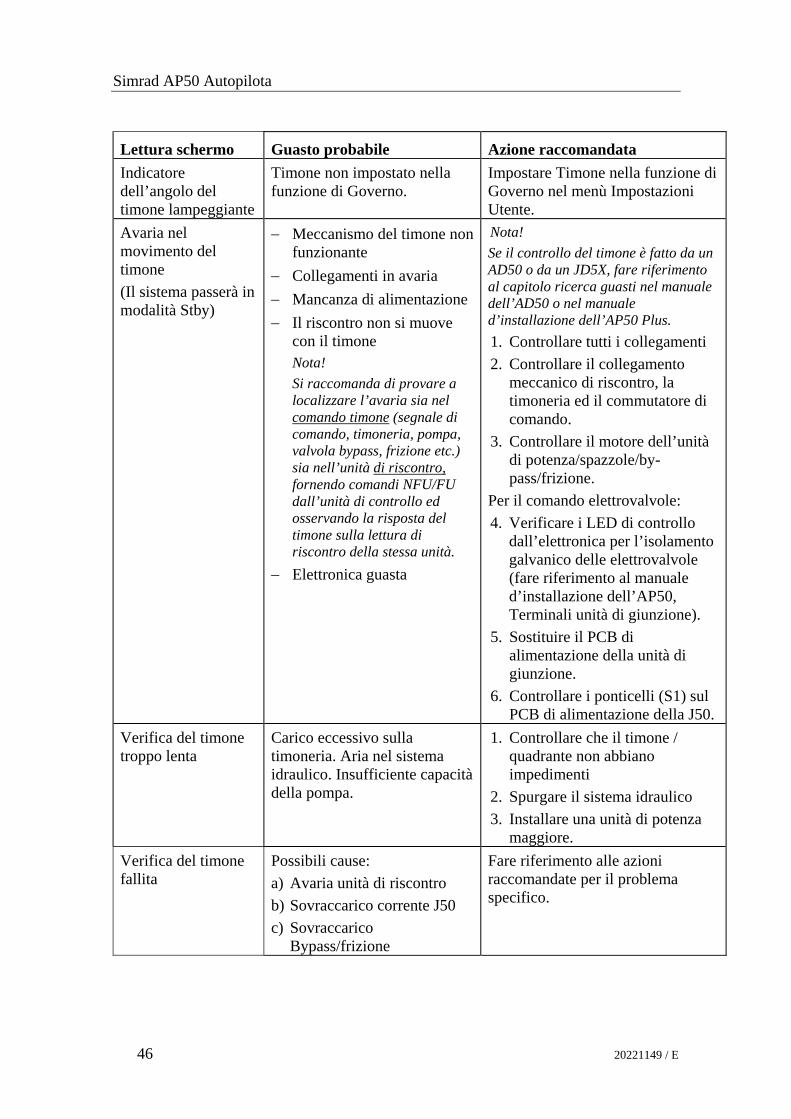
Simrad AP50 Autopilota
46 20221149 / E
Lettura schermo Guasto probabile Azione raccomandata Indicatore dell’angolo del timone lampeggiante
Timone non impostato nella funzione di Governo.
Impostare Timone nella funzione di Governo nel menù Impostazioni Utente.
Avaria nel movimento del timone (Il sistema passerà in modalità Stby)
− Meccanismo del timone non funzionante
− Collegamenti in avaria − Mancanza di alimentazione − Il riscontro non si muove
con il timone Nota! Si raccomanda di provare a localizzare l’avaria sia nel comando timone (segnale di comando, timoneria, pompa, valvola bypass, frizione etc.) sia nell’unità di riscontro, fornendo comandi NFU/FU dall’unità di controllo ed osservando la risposta del timone sulla lettura di riscontro della stessa unità.
− Elettronica guasta
Nota! Se il controllo del timone è fatto da un AD50 o da un JD5X, fare riferimento al capitolo ricerca guasti nel manuale dell’AD50 o nel manuale d’installazione dell’AP50 Plus. 1. Controllare tutti i collegamenti 2. Controllare il collegamento
meccanico di riscontro, la timoneria ed il commutatore di comando.
3. Controllare il motore dell’unità di potenza/spazzole/by-pass/frizione.
Per il comando elettrovalvole: 4. Verificare i LED di controllo
dall’elettronica per l’isolamento galvanico delle elettrovalvole (fare riferimento al manuale d’installazione dell’AP50, Terminali unità di giunzione).
5. Sostituire il PCB di alimentazione della unità di giunzione.
6. Controllare i ponticelli (S1) sul PCB di alimentazione della J50.
Verifica del timone troppo lenta
Carico eccessivo sulla timoneria. Aria nel sistema idraulico. Insufficiente capacità della pompa.
1. Controllare che il timone / quadrante non abbiano impedimenti
2. Spurgare il sistema idraulico 3. Installare una unità di potenza
maggiore. Verifica del timone fallita
Possibili cause: a) Avaria unità di riscontro b) Sovraccarico corrente J50 c) Sovraccarico
Bypass/frizione
Fare riferimento alle azioni raccomandate per il problema specifico.
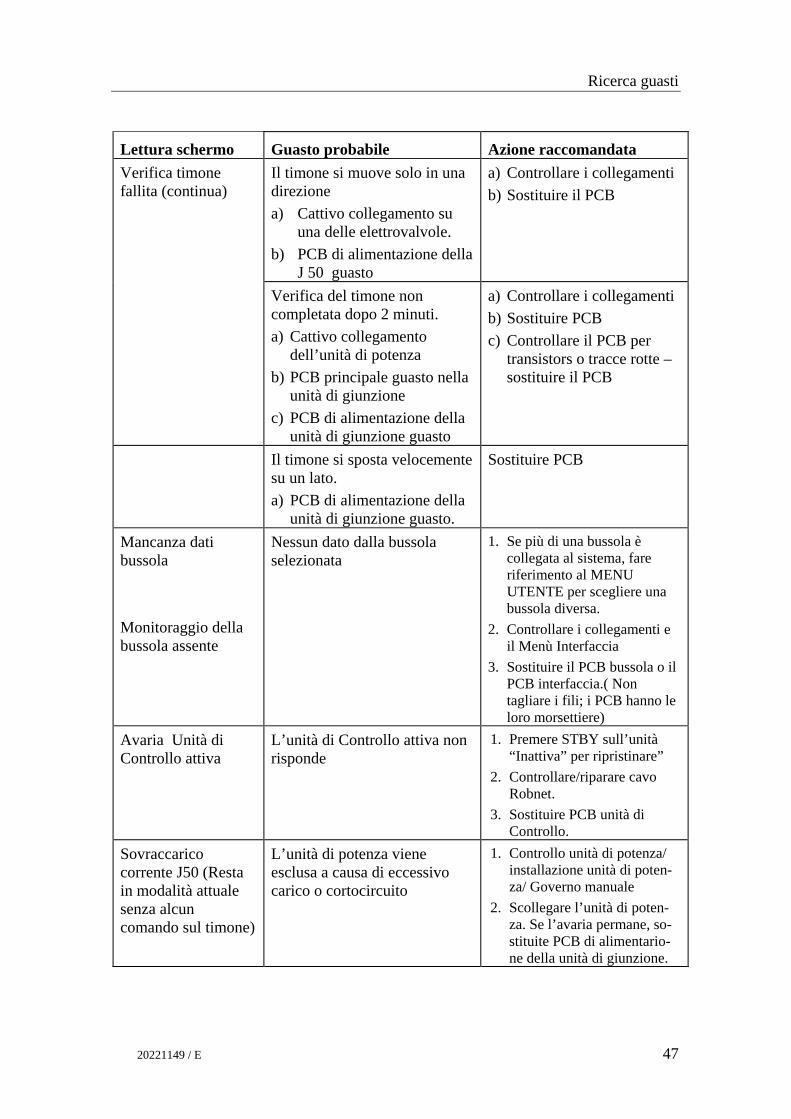
Ricerca guasti
20221149 / E 47
Lettura schermo Guasto probabile Azione raccomandata Verifica timone fallita (continua)
Il timone si muove solo in una direzione a) Cattivo collegamento su
una delle elettrovalvole. b) PCB di alimentazione della
J 50 guasto
a) Controllare i collegamenti b) Sostituire il PCB
Verifica del timone non completata dopo 2 minuti. a) Cattivo collegamento
dell’unità di potenza b) PCB principale guasto nella
unità di giunzione c) PCB di alimentazione della
unità di giunzione guasto
a) Controllare i collegamenti b) Sostituire PCB c) Controllare il PCB per
transistors o tracce rotte – sostituire il PCB
Il timone si sposta velocemente su un lato. a) PCB di alimentazione della
unità di giunzione guasto.
Sostituire PCB
Mancanza dati bussola Monitoraggio della bussola assente
Nessun dato dalla bussola selezionata
1. Se più di una bussola è collegata al sistema, fare riferimento al MENU UTENTE per scegliere una bussola diversa.
2. Controllare i collegamenti e il Menù Interfaccia
3. Sostituire il PCB bussola o il PCB interfaccia.( Non tagliare i fili; i PCB hanno le loro morsettiere)
Avaria Unità di Controllo attiva
L’unità di Controllo attiva non risponde
1. Premere STBY sull’unità “Inattiva” per ripristinare”
2. Controllare/riparare cavo Robnet.
3. Sostituire PCB unità di Controllo.
Sovraccarico corrente J50 (Resta in modalità attuale senza alcun comando sul timone)
L’unità di potenza viene esclusa a causa di eccessivo carico o cortocircuito
1. Controllo unità di potenza/ installazione unità di poten-za/ Governo manuale
2. Scollegare l’unità di poten-za. Se l’avaria permane, so-stituite PCB di alimentario-ne della unità di giunzione.
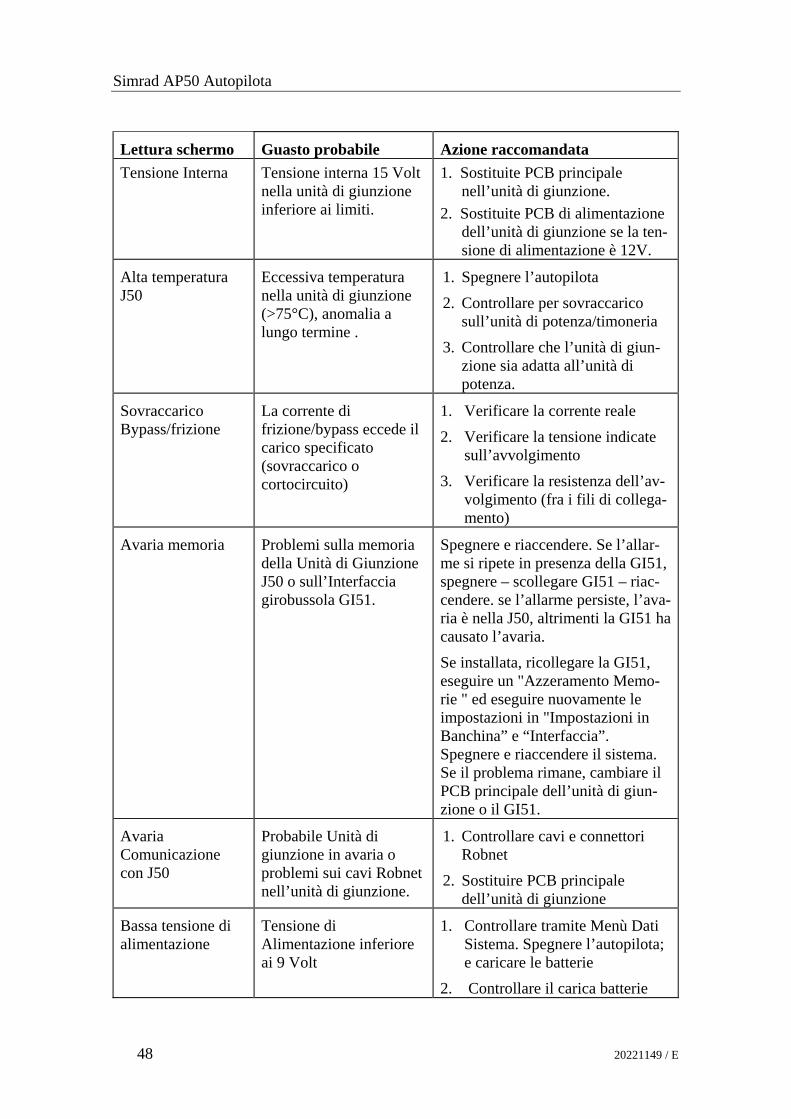
Simrad AP50 Autopilota
48 20221149 / E
Lettura schermo Guasto probabile Azione raccomandata Tensione Interna Tensione interna 15 Volt
nella unità di giunzione inferiore ai limiti.
1. Sostituite PCB principale nell’unità di giunzione.
2. Sostituite PCB di alimentazione dell’unità di giunzione se la ten-sione di alimentazione è 12V.
Alta temperatura J50
Eccessiva temperatura nella unità di giunzione (>75°C), anomalia a lungo termine .
1. Spegnere l’autopilota 2. Controllare per sovraccarico
sull’unità di potenza/timoneria 3. Controllare che l’unità di giun-
zione sia adatta all’unità di potenza.
Sovraccarico Bypass/frizione
La corrente di frizione/bypass eccede il carico specificato (sovraccarico o cortocircuito)
1. Verificare la corrente reale 2. Verificare la tensione indicate
sull’avvolgimento 3. Verificare la resistenza dell’av-
volgimento (fra i fili di collega-mento)
Avaria memoria Problemi sulla memoria della Unità di Giunzione J50 o sull’Interfaccia girobussola GI51.
Spegnere e riaccendere. Se l’allar-me si ripete in presenza della GI51, spegnere – scollegare GI51 – riac-cendere. se l’allarme persiste, l’ava-ria è nella J50, altrimenti la GI51 ha causato l’avaria. Se installata, ricollegare la GI51, eseguire un "Azzeramento Memo-rie " ed eseguire nuovamente le impostazioni in "Impostazioni in Banchina” e “Interfaccia”. Spegnere e riaccendere il sistema. Se il problema rimane, cambiare il PCB principale dell’unità di giun-zione o il GI51.
Avaria Comunicazione con J50
Probabile Unità di giunzione in avaria o problemi sui cavi Robnet nell’unità di giunzione.
1. Controllare cavi e connettori Robnet
2. Sostituire PCB principale dell’unità di giunzione
Bassa tensione di alimentazione
Tensione di Alimentazione inferiore ai 9 Volt
1. Controllare tramite Menù Dati Sistema. Spegnere l’autopilota; e caricare le batterie
2. Controllare il carica batterie
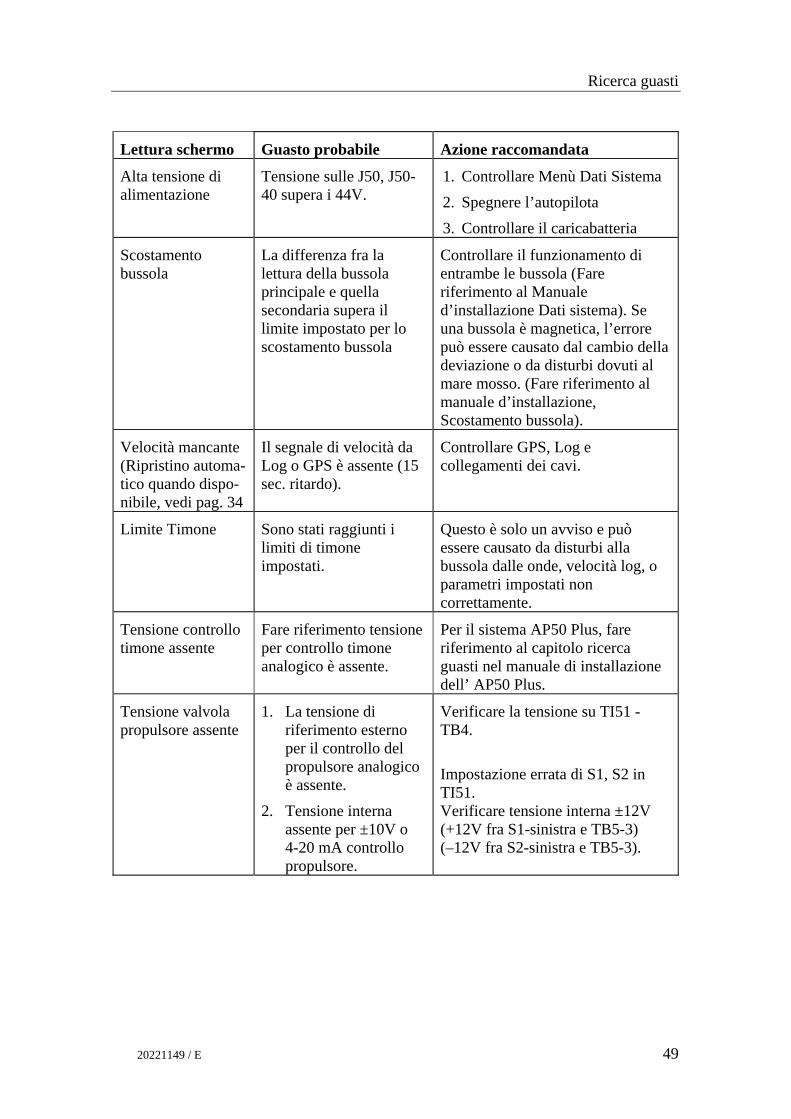
Ricerca guasti
20221149 / E 49
Lettura schermo Guasto probabile Azione raccomandata
Alta tensione di alimentazione
Tensione sulle J50, J50-40 supera i 44V.
1. Controllare Menù Dati Sistema 2. Spegnere l’autopilota 3. Controllare il caricabatteria
Scostamento bussola
La differenza fra la lettura della bussola principale e quella secondaria supera il limite impostato per lo scostamento bussola
Controllare il funzionamento di entrambe le bussola (Fare riferimento al Manuale d’installazione Dati sistema). Se una bussola è magnetica, l’errore può essere causato dal cambio della deviazione o da disturbi dovuti al mare mosso. (Fare riferimento al manuale d’installazione, Scostamento bussola).
Velocità mancante (Ripristino automa-tico quando dispo-nibile, vedi pag. 34
Il segnale di velocità da Log o GPS è assente (15 sec. ritardo).
Controllare GPS, Log e collegamenti dei cavi.
Limite Timone Sono stati raggiunti i limiti di timone impostati.
Questo è solo un avviso e può essere causato da disturbi alla bussola dalle onde, velocità log, o parametri impostati non correttamente.
Tensione controllo timone assente
Fare riferimento tensione per controllo timone analogico è assente.
Per il sistema AP50 Plus, fare riferimento al capitolo ricerca guasti nel manuale di installazione dell’ AP50 Plus.
Tensione valvola propulsore assente
1. La tensione di riferimento esterno per il controllo del propulsore analogico è assente.
2. Tensione interna assente per ±10V o 4-20 mA controllo propulsore.
Verificare la tensione su TI51 - TB4. Impostazione errata di S1, S2 in TI51. Verificare tensione interna ±12V (+12V fra S1-sinistra e TB5-3) (–12V fra S2-sinistra e TB5-3).
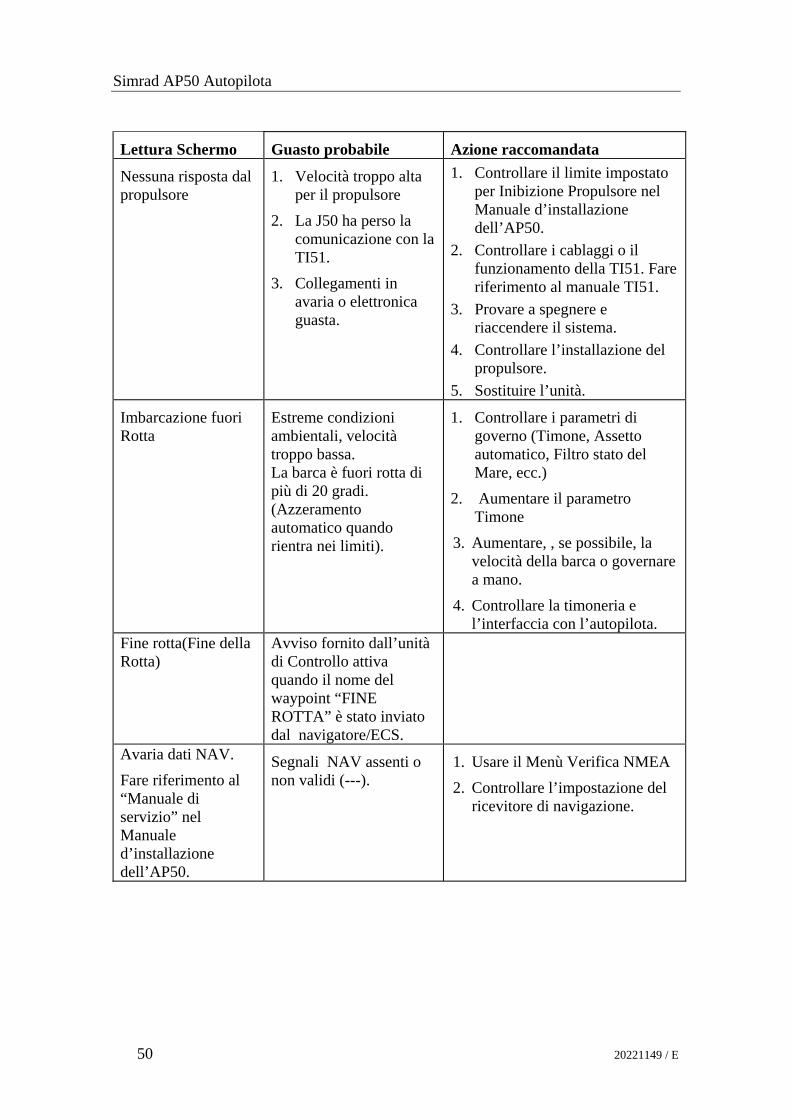
Simrad AP50 Autopilota
50 20221149 / E
Lettura Schermo Guasto probabile Azione raccomandata
Nessuna risposta dal propulsore
1. Velocità troppo alta per il propulsore
2. La J50 ha perso la comunicazione con la TI51.
3. Collegamenti in avaria o elettronica guasta.
1. Controllare il limite impostato per Inibizione Propulsore nel Manuale d’installazione dell’AP50.
2. Controllare i cablaggi o il funzionamento della TI51. Fare riferimento al manuale TI51.
3. Provare a spegnere e riaccendere il sistema.
4. Controllare l’installazione del propulsore.
5. Sostituire l’unità.
Imbarcazione fuori Rotta
Estreme condizioni ambientali, velocità troppo bassa. La barca è fuori rotta di più di 20 gradi. (Azzeramento automatico quando rientra nei limiti).
1. Controllare i parametri di governo (Timone, Assetto automatico, Filtro stato del Mare, ecc.)
2. Aumentare il parametro Timone
3. Aumentare, , se possibile, la velocità della barca o governare a mano.
4. Controllare la timoneria e l’interfaccia con l’autopilota.
Fine rotta(Fine della Rotta)
Avviso fornito dall’unità di Controllo attiva quando il nome del waypoint “FINE ROTTA” è stato inviato dal navigatore/ECS.
Avaria dati NAV. Fare riferimento al “Manuale di servizio” nel Manuale d’installazione dell’AP50.
Segnali NAV assenti o non validi (---).
1. Usare il Menù Verifica NMEA 2. Controllare l’impostazione del
ricevitore di navigazione.
Glossario
20221149 / E 51
5 GLOSSARIO Allarme di Arrivo– Segnale di allarme generato da un apparato di navigazione che indica l’arrivo al waypoint o l’arrivo ad una certa distanza dal waypoint (vedasi Cerchio di Arrivo).
Arrivo perpendicolare– Attraversamento della linea perpendicolare alla linea di rotta che passa sul punto di destinazione.
BPW – Rilevamento dalla posizione al Waypoint– Rilevamento di uno specifico waypoint partendo dalla posizione attuale.
BWW – Rilevamento da waypoint a waypoint – Angolo di rilevamento della linea il waypoint “A” e quello “DA”, calcolato dal waypoint “DA” per un qualsiasi waypoint a propria scelta.
Cerchio di Arrivo– Limite artificiale posizionato attorno al waypoint di destinazione superando il quale si farà scattare il segnale di allarme di arrivo. COG – Rotta rispetto al Fondo –Direzione attuale di movimento di un’imbarcazione, tra due punti, rispetto alla superficie terrestre. La rotta della nave potrebbe differire dalla COG a causa dell’effetto del vento, della corrente, ecc. Deviazione Magnetica– Errore della bussola: differenza tra la lettura di una bussola e l’attuale rotta magnetica o rilevamento dovuta ad errori nella lettura della bussola. Direzione – La direzione orizzontale sulla quale l’imbarcazione sta attualmente puntando o dirigendosi in ogni istante, espressa in unità angolari rispetto ad una direzione di riferimento, solitamente 000° rispetto alla direzione di riferimento fino a 359°. Direzione Magnetica – direzione relativa al nord magnetico. Direzione Reale – Direzione Relativa al nord reale. ECDIS – Sistema Cartografico Elettronico e videata Informazioni. ECS – Sistema Cartografico Elettronico GPS – Sistema di Posizionamento Globale – Questo sistema consiste in 18 satelliti più 3 di riserva su orbite fisse che ruotano attorno alla terra ad un’altitudine di circa 20.200 Km. Il sistema fornisce all’utilizzatore la copertura 24 ore su 24 della posizione con una precisione variabile da 15 a 100 metri.
Simrad AP50 Autopilota
52 20221149 / E
IMO MSC(64)67 – (International Maritime Organization) Standard di prestazioni per sistemi di controllo della direzione. ISO 11674:2000(E) – (International Organization for Standardization) Specifica la struttura, le prestazioni, l’ispezioni ed il collaudo dei sistemi di controllo della direzione. Linea Lossodromica– Linea che attraversa tutti i meridiani con lo stesso angolo. Quando riportata su una carta di Mercatore, la linea lossodromia è una linea retta. Essendo però la carta di Mercatore una distorsione del globo terrestre su una superficie piana, la linea lossodromica sarà più lunga della rotta su linea ortodromica. Loran C – Complesso sistema di radio navigazione sviluppato dalla guardia costiera Americana per assistere i naviganti fornendo il punto nave. La sigla LORAN significa LOng RAnge Navigation. E’ un sistema che fornisce copertura 24 ore al giorno con stazioni trasmittenti terrestri. NMEA 0183 – Protocollo elettronico (Linguaggio) realizzato per consentire la comunicazione tra i vari tipi di apparati elettronici marini. In breve questa è una linea seriale di comunicazione a due fili schermati che consente ad un apparato di parlare e ad un altro di ascoltare. Sono disponibili vari tipi di messaggi consentendo l’interfaccia tra diversi tipi di apparati.. Per la navigazione avanzata dell’imbarcazione con il raggio di virata preimpostato su rotte di waypoint.
Rilevamento – La direzione orizzontale tra due punti terrestri, espressa come valore angolare da una direzione di riferimento, solitamente misurata a partire da 000° alla direzione di riferimento in senso orario sino a 359°. Rilevamento Magnetico – Rilevamento relativo al nord magnetico; rilevamento bussola corretto della deviazione. Rilevamento relativo– Rilevamento relativo alla direzione o all’imbarcazione. Rilevamento Reale – Rilevamento relativo al nord reale; rilevamento bussola corretto per l’errore della bussola. Rotta – Direzione orizzontale su cui si porta, o si intende portare l’imbarcazione, espressa come valore angolare dal nord inteso come 000° in senso orario sino a 359°. Rigorosamente il termine definisce la direzione nell’acqua e non la direzione rispetto al fondo. Differisce dalla direzione. Rotta – Sequenza memorizzata di waypoint. Questi waypoint verranno elencati nella sequenza desiderata per poter essere seguire.
Glossario
20221149 / E 53
Rotta Ortodromica – La rotta che è rappresenta la distanza più breve tra due punti. Sistema ECS di tipo approvato rispetto alle regolamentazioni ECDIS. SOG – Velocità rispetto al Fondo è la reale velocità dell’imbarcazione rispetto al fondale. Variazione magnetica – Una bussola magnetica punta al polo Nord magnetico terrestre. La differenza tra questa direzione ed il Nord reale è la variazione magnetica. L’ammontare della variazione magnetica varia a seconda del luogo dove ci si trova sulla terra. VDR – Voyage Data Recorder. Registrazione e memorizzazione di tutte le informazioni che possono essere importanti per la ricostruzione di incidenti, come l’ora, la data, la posizione, la velocità, la direzione, la profondità, il video, la comunicazione, ecc. Le prestazioni richieste sono indicate nelle direttive IMO A.861(20), e EU 1999/35/EC ed IEC61996.
Vento Apparente – vedi vento relativo Vento relativo– Velocità e direzione relative che il vento sembra assumere rispetto ad un punto in movimento (anche definito vento apparente). Waypoint – Punto della superficie terrestre, memorizzato nel navigatore. Normalmente questo punto è identificato da Latitudine e Longitudine sebbene sia possibile anche memorizzarlo in coordinate Loran (TD). XTE – Errore di Fuori rotta – usato per identificare la posizione dell’imbarcazione relativamente alla linea di rotta tra due waypoint. Lo spostamento laterale dell’imbarcazione a destra o sinistra rispetto alla linea di rotta viene definito errore di Fuori rotta. Viene normalmente espresso in centesimi di miglio nautico che corrispondono a 18,5 m.

Simrad AP50 Autopilota
54 20221149 / E
AP5
0 M
anual
e del
l’oper
atore
IT,
Doc.
no.
20221149,
Rev
.E