
Ship Motion Simulation Analysis - Naiad Flyer_Motion_Simulation.pdf · Ship Motion Simulation &...
2
Ship Motion Simulation & Analysis Prediction and Testing of Vessel Motions & Effectiveness of Ride Control Devices Naiad Dynamics began conducting frequency and time domain motion simulations over 40 years ago with the US Navy Surface Effect Ship Program. Since then, we have refined and expanded our capabilities to produce seakeeping simulation tools for a variety of hull forms and motion control devices. Our proprietary suite of simulation programs have been validated with tank tests and actual data from installed systems, and is the most effective method of determining the best RCS solution. Process Overview Roll, pitch, yaw, heave and sway motions are first computer modeled on the bare hull to simulate the uncontrolled motions at a variety of speeds, headings and sea states. Sea condition data, even those for a particular route, are specified by custom spectra taken from wave height measurements, or by Pierson‐Moskowitz, JONSWAP or ITTC spectra for all headings. Simulation results are graphed in RMS values for the five degrees of freedom, as well as vertical and lateral accelerations for detailed analysis. From this data, Motion Sickness Incidence (MSI) and Motion Interruption Incidence (MII) averages are predicted. Suitable control devices are then specified. A scale model of the bare hull can be fabricated and tank tested for comparative data to fine‐tune the simulation programs. 110M Trimaran at 40 knots in 3 M H1/3 Seas with Tp 7.0 sec RMS Roll (degrees) 0 2 4 6 8 10 12 0 30 60 90 120 150 180 heading (degrees) RMS Roll (degrees) bare hull tab RCS 3 Tfoil RCS bow Tfoil + tab 110M Trimaran at 40 knots in 3 M H1/3 Seas with Tp 7.0 sec RMS Pitch (degrees) 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 0 30 60 90 120 150 180 RMS Pitch (degrees) bare hull tab RCS 3 Tfoil RCS bow Tfoil + tab 110M Trimaran at 40 knots in 3 M H1/3 Seas with Tp 7.0 sec RMS Heave (meters) 0. 0 0. 1 0. 2 0. 3 0. 4 0. 5 0. 6 0. 7 0. 8 0 30 60 90 120 150 180 heading (degrees) RMS Heave (meters) bare hull tab RCS 3 Tfoil RCS bow Tfoil + tab
-
Upload
truongliem -
Category
Documents
-
view
221 -
download
0
Transcript of Ship Motion Simulation Analysis - Naiad Flyer_Motion_Simulation.pdf · Ship Motion Simulation &...
Ship Motion Simulation & Analysis Prediction and Testing of Vessel Motions & Effectiveness of Ride Control Devices
Naiad Dynamics began conducting frequency and time domain motion simulations over 40 years ago with the US Navy Surface Effect Ship Program. Since then, we have refined and expanded our capabilities to produce seakeeping simulation tools for a variety of hull forms and motion control devices. Our proprietary suite of simulation programs have been validated with tank tests and actual data from installed systems, and is the most effective method of determining the best RCS solution. Process Overview
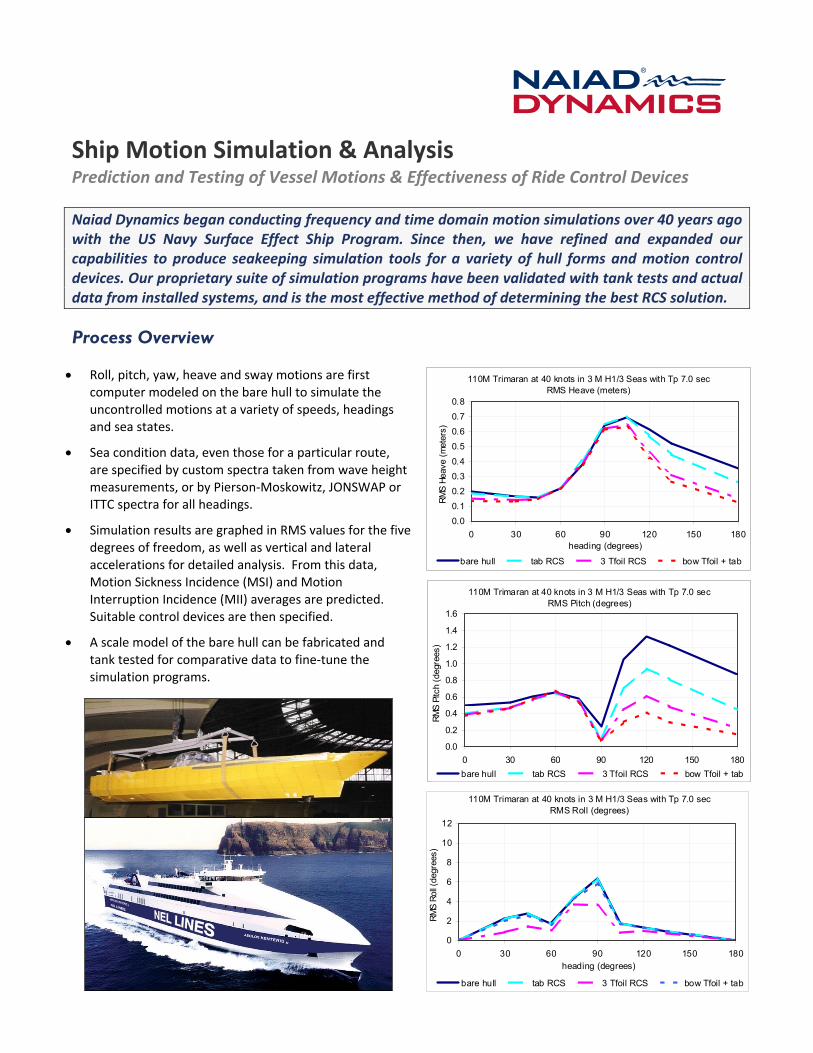
Roll, pitch, yaw, heave and sway motions are first computer modeled on the bare hull to simulate the uncontrolled motions at a variety of speeds, headings and sea states.
Sea condition data, even those for a particular route, are specified by custom spectra taken from wave height measurements, or by Pierson‐Moskowitz, JONSWAP or ITTC spectra for all headings.
Simulation results are graphed in RMS values for the five degrees of freedom, as well as vertical and lateral accelerations for detailed analysis. From this data, Motion Sickness Incidence (MSI) and Motion Interruption Incidence (MII) averages are predicted. Suitable control devices are then specified.
A scale model of the bare hull can be fabricated and tank tested for comparative data to fine‐tune the simulation programs.
110M Trimaran at 40 knots in 3 M H1/3 Seas with Tp 7.0 sec RMS Roll (degrees)
0
2
4
6
8
10
12
0 30 60 90 120 150 180heading (degrees)
RM
S R
oll (
degr
ees)
bare hull tab RCS 3 Tfoil RCS bow Tfoil + tab
110M Trimaran at 40 knots in 3 M H1/3 Seas with Tp 7.0 sec RMS Pitch (degrees)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
0 30 60 90 120 150 180heading (degrees)
RM
S P
itch
(deg
rees
)
bare hull tab RCS 3 Tfoil RCS bow Tfoil + tab
110M Trimaran at 40 knots in 3 M H1/3 Seas with Tp 7.0 sec RMS Heave (meters)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 30 60 90 120 150 180heading (degrees)
RM
S H
eave
(m
eter
s)
bare hull tab RCS 3 Tfoil RCS bow Tfoil + tab
Active T‐Foils, Trim Tabs, Interceptors, Lifting Foils, Fins, AirCushions and/or Rudders are used in simulations alone and incombinations to identify the most effective motion controlsolution.
Scale models can be fitted with recommended control devicesand tank tested for RCS performance using actual Naiad controlsystem hardware.
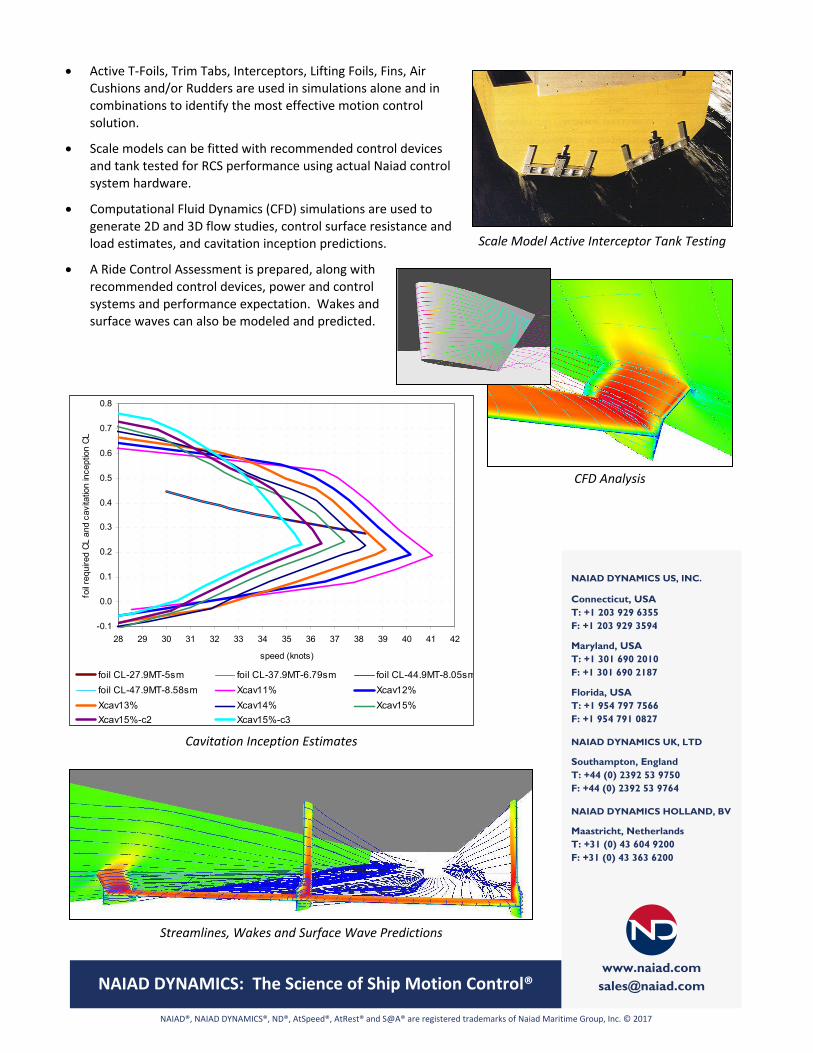
Computational Fluid Dynamics (CFD) simulations are used togenerate 2D and 3D flow studies, control surface resistance andload estimates, and cavitation inception predictions.
A Ride Control Assessment is prepared, along withrecommended control devices, power and controlsystems and performance expectation. Wakes andsurface waves can also be modeled and predicted.
CFD Analysis
NAIAD DYNAMICS: The Science of Ship Motion Control®
Scale Model Active Interceptor Tank Testing
Streamlines, Wakes and Surface Wave Predictions
-0.1
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
speed (knots)
foil
requ
ired
CL
and
cavi
tatio
n in
cept
ion
CL
foil CL-27.9MT-5sm foil CL-37.9MT-6.79sm foil CL-44.9MT-8.05sm
foil CL-47.9MT-8.58sm Xcav11% Xcav12%
Xcav13% Xcav14% Xcav15%
Xcav15%-c2 Xcav15%-c3
Cavitation Inception Estimates
NAIAD®, NAIAD DYNAMICS®, ND®, AtSpeed®, AtRest® and S@A® are registered trademarks of Naiad Maritime Group, Inc. © 2017
NAIAD DYNAMICS US, INC.
Connecticut, USA T: +1 203 929 6355 F: +1 203 929 3594
Maryland, USA T: +1 301 690 2010 F: +1 301 690 2187
Florida, USA T: +1 954 797 7566 F: +1 954 791 0827
NAIAD DYNAMICS UK, LTD
Southampton, England T: +44 (0) 2392 53 9750 F: +44 (0) 2392 53 9764
NAIAD DYNAMICS HOLLAND, BV
Maastricht, Netherlands T: +31 (0) 43 604 9200 F: +31 (0) 43 363 6200
www.naiad.com [email protected]


















