
Servo Motor Bab 2&3
68
BAB II DASAR TEORI 2.1 SERVO MOTOR Servo berasal dari bahasa latin untuk sesuatu yang bisa diperintah. Sebuah alat yang bekerja dengan mengikuti perintah-perintah yang diberikan. AC Servo adalah pengaturan servo yang menggunakan sebuah AC motor. Yang diklasifikasikan menjadi tipe synchronous dan tipe induction tergantung dari jenis motor. Tipe synchronous ( menggunakan motor synchronous, tipe magnet permanen, kapasitas kecil, kenaikan panas yang rendah dan akurasi torque yang bagus). Tipe induction ( menggunakan motor induksi, kuat dan kapasitas yang besar). DC Servo adalah pengaturan servo yang mengunakan sebuah DC motor. 2.1.1 Keistimewaan dan Karakteristik Servo Motor 4
-
Upload
muhamad-nawawi -
Category
Documents
-
view
178 -
download
13
description
Servo Motor Bab 2&3
Transcript of Servo Motor Bab 2&3
BAB II
DASAR TEORI
2.1 SERVO MOTOR
Servo berasal dari bahasa latin untuk sesuatu yang bisa diperintah. Sebuah alat yang
bekerja dengan mengikuti perintah-perintah yang diberikan.
AC Servo adalah pengaturan servo yang menggunakan sebuah AC motor. Yang
diklasifikasikan menjadi tipe synchronous dan tipe induction tergantung dari jenis
motor.
Tipe synchronous ( menggunakan motor synchronous, tipe magnet permanen,
kapasitas kecil, kenaikan panas yang rendah dan akurasi torque yang bagus).
Tipe induction ( menggunakan motor induksi, kuat dan kapasitas yang besar).
DC Servo adalah pengaturan servo yang mengunakan sebuah DC motor.
2.1.1 Keistimewaan dan Karakteristik Servo Motor
Baik tipe AC maupun DC Servo Motor harus dapat merespon secara akurat sinyal
perintah yang berpariasi untuk posisi dan kecepatan. (Baik AC maupun DC)
Untuk tanggung jawabnya, servo motor harus mempunyai kesanggupan untuk start up dengan
akselerasi (penambahan) yang besar atau berhenti dengan deklerasi (penurunan) yang besar.
Untuk mendapat akselerasi dan deklerasi yang besar:
Torsi yang dibangkitkan harus besar (kekuatan medan dinaikkan)
Kelembaman rotor (momen yang berpusat pada titik tengah ) harus kecil.
( kelembaman diturunkan dan dinaikkan responnya dalam tipe moving coil ).
4

2.1.2 Penjelasan Terminology
Penguatan medan : flux medan dubutuhkan untuk membangkitkan torsi.
DC motor ( sistem medan stator yang tetap ).
Motor sinkron ( medan rotor magnet tetap )
Armature : dimana arus mengalir dibutuhkan untuk membangkitkan torsi.
DC motor ( Armatur adalah rotor )
Synchronous motor ( Armatur adalah stator )
Rotor : Bagian yang berputar dari motor.
Stator : Bagian motor yang diam dan disatukan dengan frame.
Point-point dimana DC motor adalah lebih unggul sebagai servo motor.
Torsi dapat diaplikasikan dalm rumus yang sederhana. Desainnya sederhana
dan simple.
Konstruksi motor kokoh.
Gambar 2.1 Kontruksi DC Servo Motor
5

Gambar 2.2 Type DC Servo Motor
Gambar 2.3 Kontruksi dan konfigurasi dasar dari AC Servo Motor
6

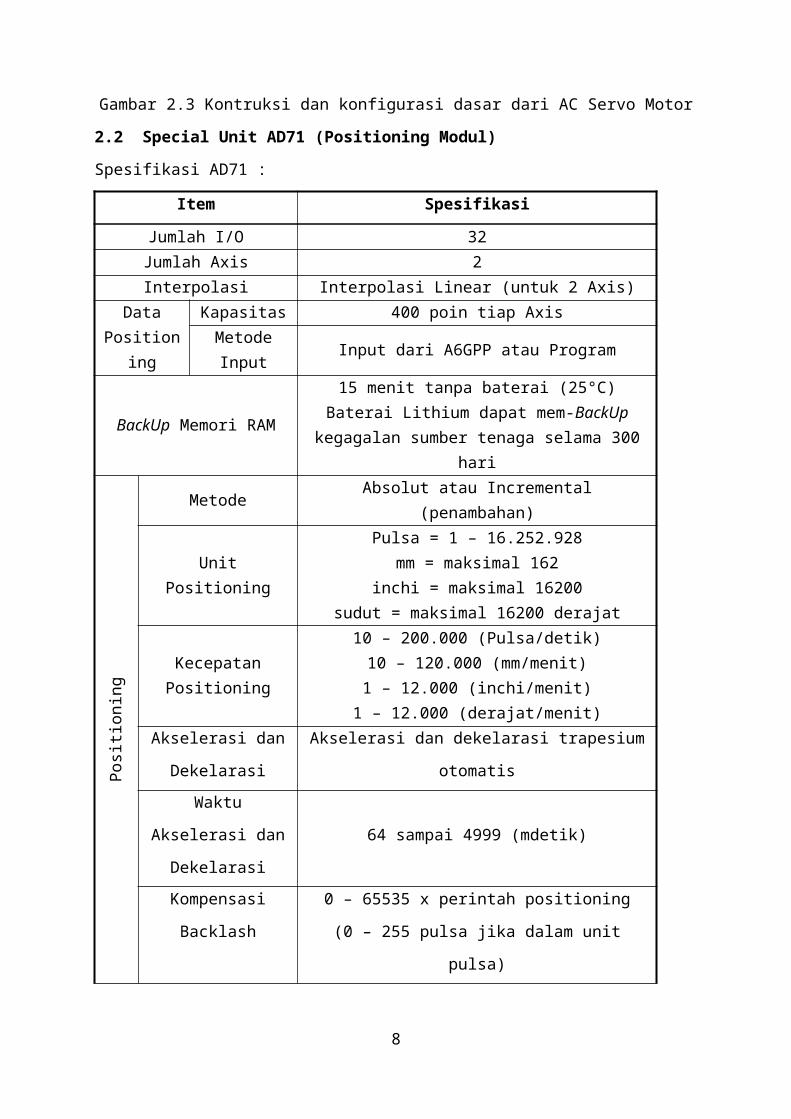
2.2 Special Unit AD71 (Positioning Modul)
Spesifikasi AD71 :
Item Spesifikasi
Jumlah I/O 32Jumlah Axis 2Interpolasi Interpolasi Linear (untuk 2 Axis)
Data Positioning
Kapasitas 400 poin tiap AxisMetode Input Input dari A6GPP atau Program
BackUp Memori RAM15 menit tanpa baterai (25°C)
Baterai Lithium dapat mem-BackUp kegagalan sumber tenaga selama 300 hari
Posi
tioni
ng
Metode Absolut atau Incremental (penambahan)
Unit Positioning
Pulsa = 1 – 16.252.928mm = maksimal 162
inchi = maksimal 16200sudut = maksimal 16200 derajat
Kecepatan Positioning
10 – 200.000 (Pulsa/detik)10 – 120.000 (mm/menit)1 – 12.000 (inchi/menit)
1 – 12.000 (derajat/menit)Akselerasi dan
DekelarasiAkselerasi dan dekelarasi trapesium otomatis
Waktu Akselerasi dan
Dekelarasi 64 sampai 4999 (mdetik)
Kompensasi Backlash 0 – 65535 x perintah positioning
(0 – 255 pulsa jika dalam unit pulsa)
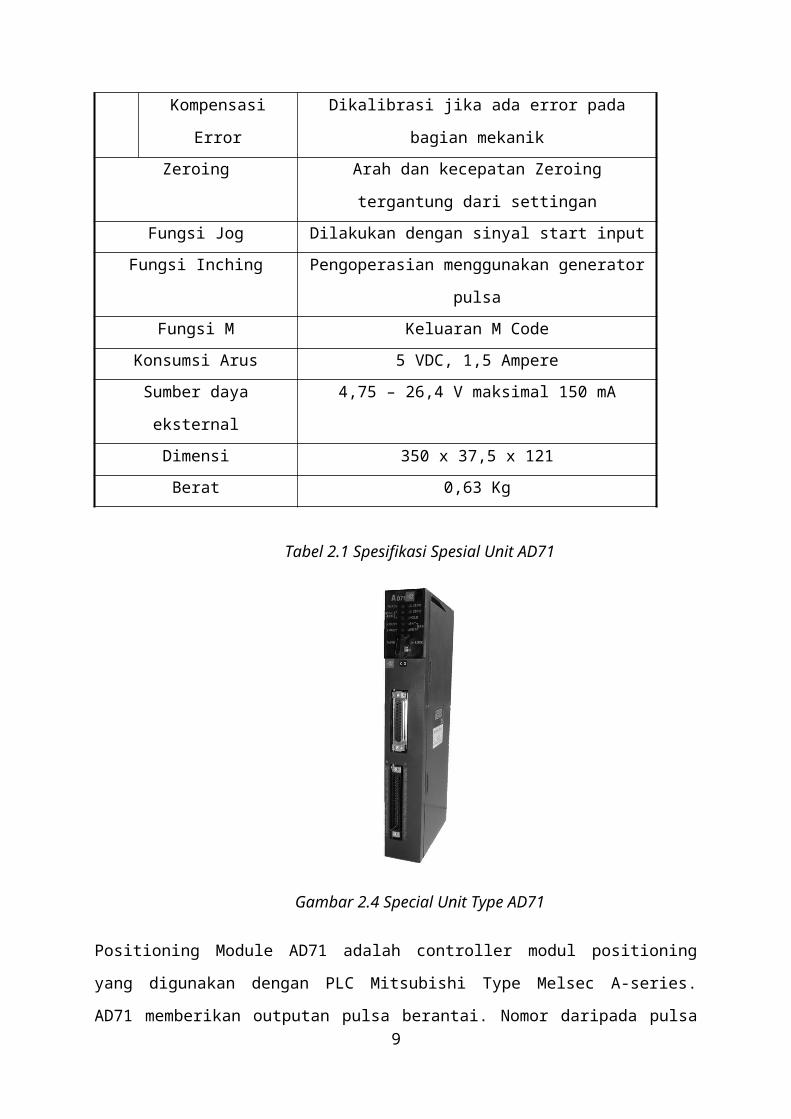
Kompensasi Error Dikalibrasi jika ada error pada bagian mekanik
Zeroing Arah dan kecepatan Zeroing tergantung dari settingan
Fungsi Jog Dilakukan dengan sinyal start input
Fungsi Inching Pengoperasian menggunakan generator pulsa
Fungsi M Keluaran M Code
Konsumsi Arus 5 VDC, 1,5 Ampere
Sumber daya eksternal 4,75 – 26,4 V maksimal 150 mA
Dimensi 350 x 37,5 x 121
Berat 0,63 Kg
Tabel 2.1 Spesifikasi Spesial Unit AD71
7
Gambar 2.4 Special Unit Type AD71
Positioning Module AD71 adalah controller modul positioning yang digunakan dengan PLC
Mitsubishi Type Melsec A-series. AD71 memberikan outputan pulsa berantai. Nomor
daripada pulsa akan menentukan sistem posisi dan frekuensi pulsa menentukan kecepatan
lintasan perjalanan. Positioning dapat dispesifikasikan dalam beberapa nomor unit, yaitu: mm,
inchi, sudut dan pulsa yang berupa satuan feedrate per pulsa, dimana feedrate sebanding
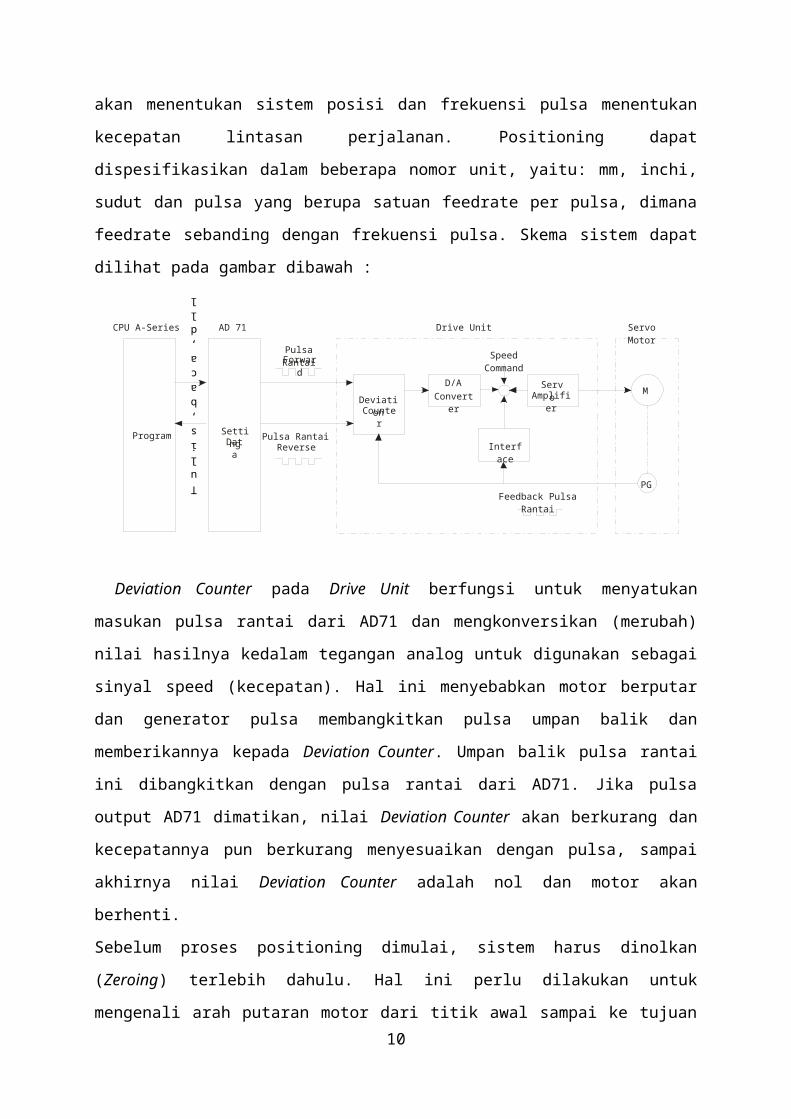
dengan frekuensi pulsa. Skema sistem dapat dilihat pada gambar dibawah :
Deviation Counter pada Drive Unit berfungsi untuk menyatukan masukan pulsa rantai dari
AD71 dan mengkonversikan (merubah) nilai hasilnya kedalam tegangan analog untuk
digunakan sebagai sinyal speed (kecepatan). Hal ini menyebabkan motor berputar dan
generator pulsa membangkitkan pulsa umpan balik dan memberikannya kepada Deviation
Counter. Umpan balik pulsa rantai ini dibangkitkan dengan pulsa rantai dari AD71. Jika pulsa
8
Tulis, baca, dll
Pulsa RantaiForward
Pulsa RantaiReverse
AD 71
SettingData
CPU A-Series
Program
DeviationCounter
ServoAmplifier
Feedback Pulsa Rantai
Drive Unit
D/AConverter
Interface
Speed Command
Servo Motor
PG
M
output AD71 dimatikan, nilai Deviation Counter akan berkurang dan kecepatannya pun
berkurang menyesuaikan dengan pulsa, sampai akhirnya nilai Deviation Counter adalah nol
dan motor akan berhenti.
Sebelum proses positioning dimulai, sistem harus dinolkan (Zeroing) terlebih dahulu. Hal ini
perlu dilakukan untuk mengenali arah putaran motor dari titik awal sampai ke tujuan dan juga
untuk mengenali posisi awal (Home Position) atau alamat nol (alamat nol tidak multlak
tergantung setingan pada parameter Zeroing Addressnya) dari counter posisi AD71. Semua
proses posisi (Positioning) berikutnya menggunakan alamat memori mulai dari alamat nol
(Zero), dan penambahan alamat selanjutnya dapat dilakukan dengan menggunakan alamat
mutlak/absolut (masing – masing titik memiliki alamat tersendiri), atau alamat
penambahan/incremental (diberikan jarak dari alamat sebelumnya).
Sistem dapat dinolkan dengan salah satu dari tiga cara, semuanya menggunakan “zeroing
dog”. Zeroing dog adalah switch atau penggerak yang memberikan setengah kondisi dari
penentuan home posisi. Kondisi kedua tergantung pada cara zeroing yang digunakan,
misalnya adalah sebagai berikut :
1. Sinyal zeroing phasa dari rotary encoder
2. penghenti mekanik dikutkan dengan timer penghenti
3. penghenti mekanik diikutkan dengan feedback sinyal torsi dari sinyal penggerak.
Data operasi untuk AD71 disimpan dalam buffer memory dan berisi paramater (yang
menentukan tetapan seperti feedrate maksimum), atau zeroing (menentukan proses zeroing),
data positioning (memuat alamat masing – masing titik, kecepatan), dan data start
(menentukan posisi untuk start). Data positioning ditunjukan dengan nomor data positioning,
yang mana ini ditentukan oleh lokasinya dalam buffer memory. Ada dua cara untuk
mengontrol secara manual output pulsa rantai AD71, yaitu operasi jog dan inching. Selama
operasi jog, output pulsa rantai dibangun untuk sepanjang sinyal jog dari PC, sedangkan
untuk operasi inching ditentukan oleh nomor pulsa yang dikeluarkan setiap waktu selama
sinyal input generator pulsa diberikan (generator pulsa manual juga ditentukan oleh “manual
pulser”). Fungsi inching jika menggunakan manual extrernal generator pulsa harus sesuai
dengan ketentuan dalam pengawatan dan koneksi AD71 agar dapat dioperasikan dengan
benar.
9
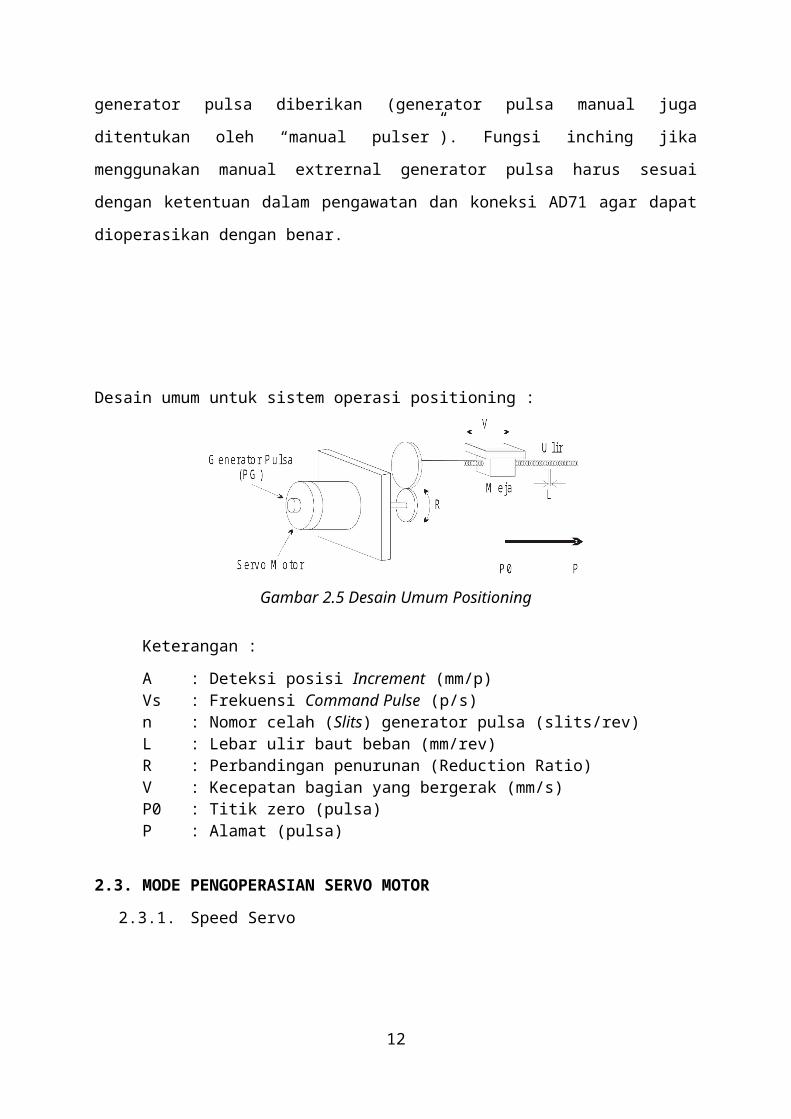
Desain umum untuk sistem operasi positioning :
Gambar 2.5 Desain Umum Positioning
Keterangan :
A : Deteksi posisi Increment (mm/p)Vs : Frekuensi Command Pulse (p/s)n : Nomor celah (Slits) generator pulsa (slits/rev)L : Lebar ulir baut beban (mm/rev)R : Perbandingan penurunan (Reduction Ratio)V : Kecepatan bagian yang bergerak (mm/s)P0 : Titik zero (pulsa)P : Alamat (pulsa)
2.3. MODE PENGOPERASIAN SERVO MOTOR
2.3.1. Speed Servo
Pada mode Speed terdapat dua inputan yaitu dari digital input dan analog input, kedunya diset
pada setingan parameter servo Amplifier. Untuk mode speed tidak memerlukan special modul
akan tetapi hanya berupa sequnce program.10

Untuk lebih jelasnya dapat dilihat di buku MELSERVO-J20A Intruction Manual.
2.3.2. Positioning Servo
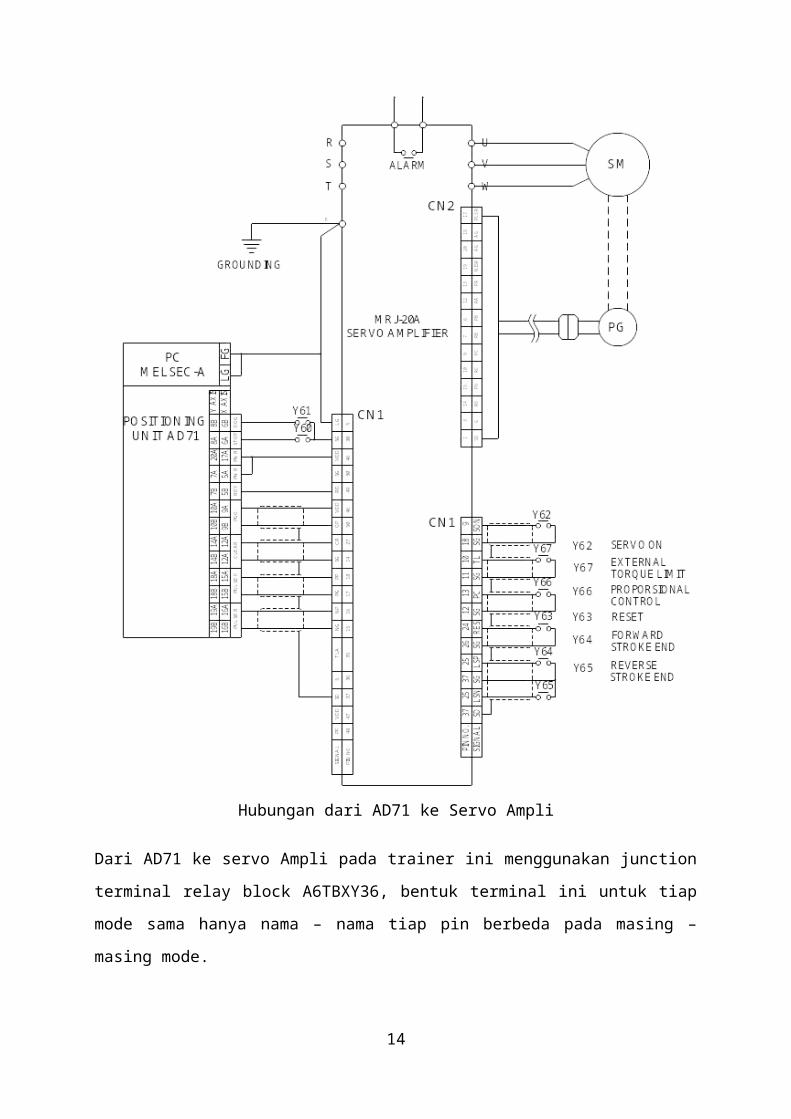
Hubungan dari AD71 ke Servo Ampli
Dari AD71 ke servo Ampli pada trainer ini menggunakan junction terminal relay block
A6TBXY36, bentuk terminal ini untuk tiap mode sama hanya nama – nama tiap pin berbeda
pada masing – masing mode.
11
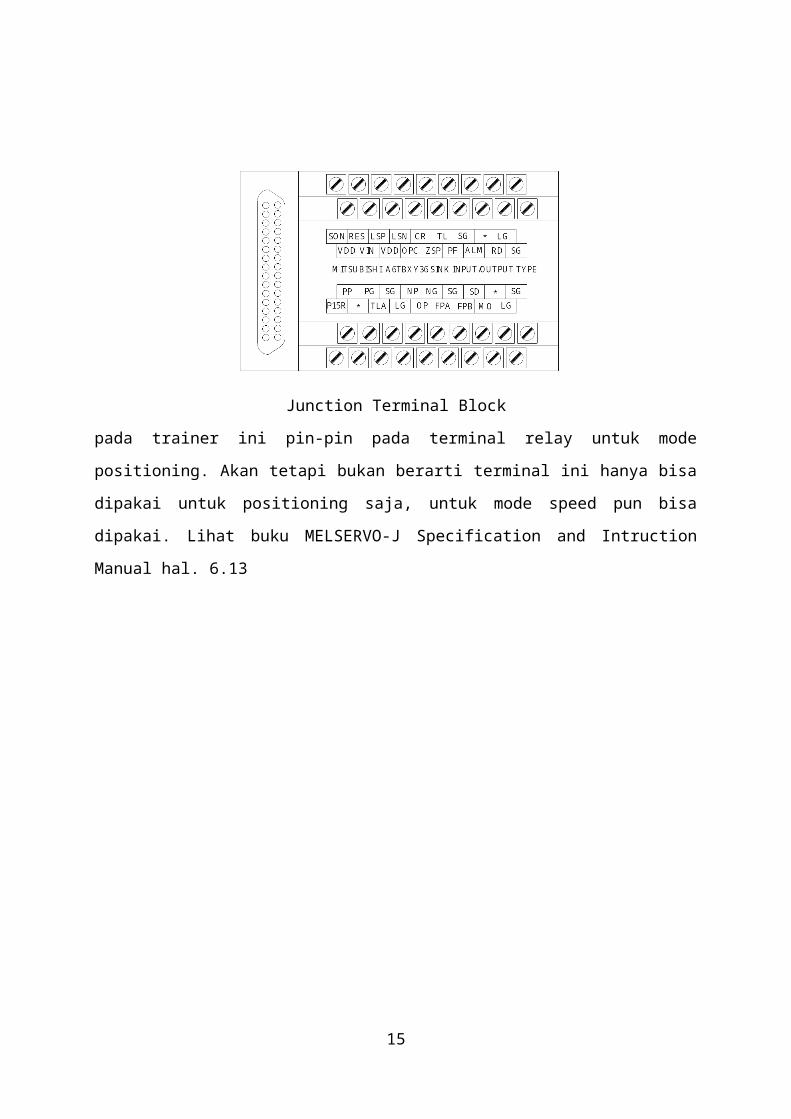
Junction Terminal Block
pada trainer ini pin-pin pada terminal relay untuk mode positioning. Akan tetapi bukan berarti
terminal ini hanya bisa dipakai untuk positioning saja, untuk mode speed pun bisa dipakai.
Lihat buku MELSERVO-J Specification and Intruction Manual hal. 6.13
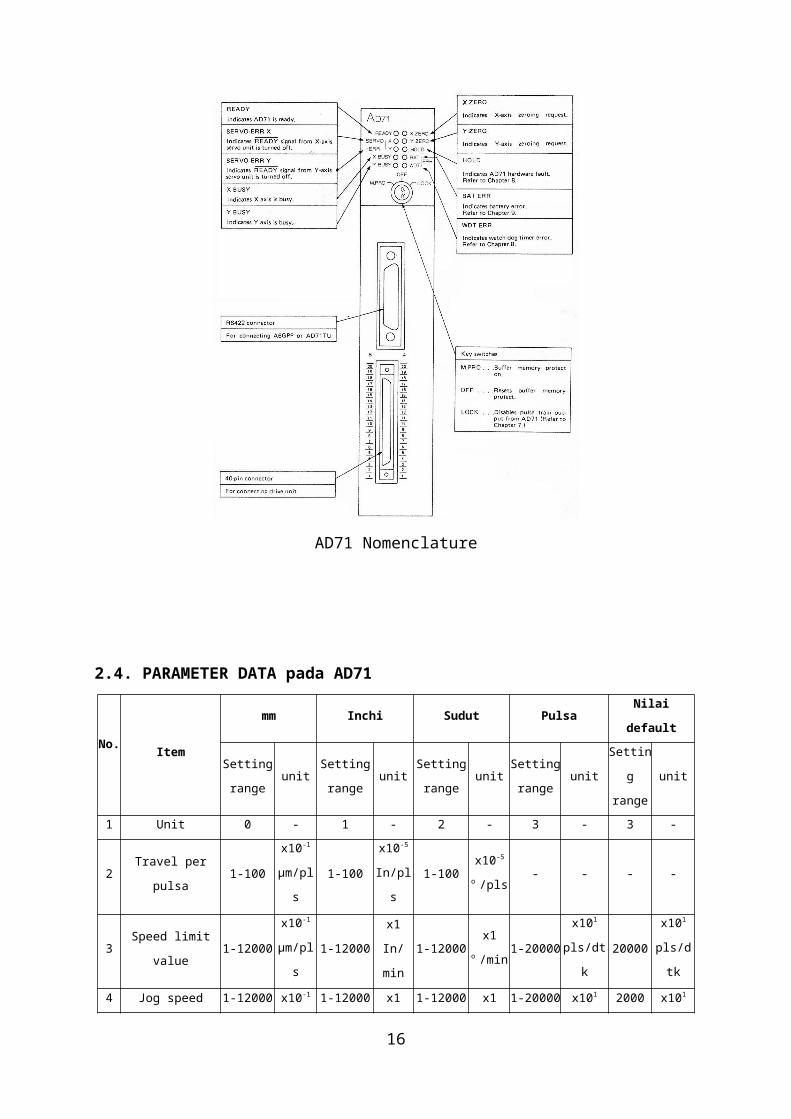
AD71 Nomenclature
12

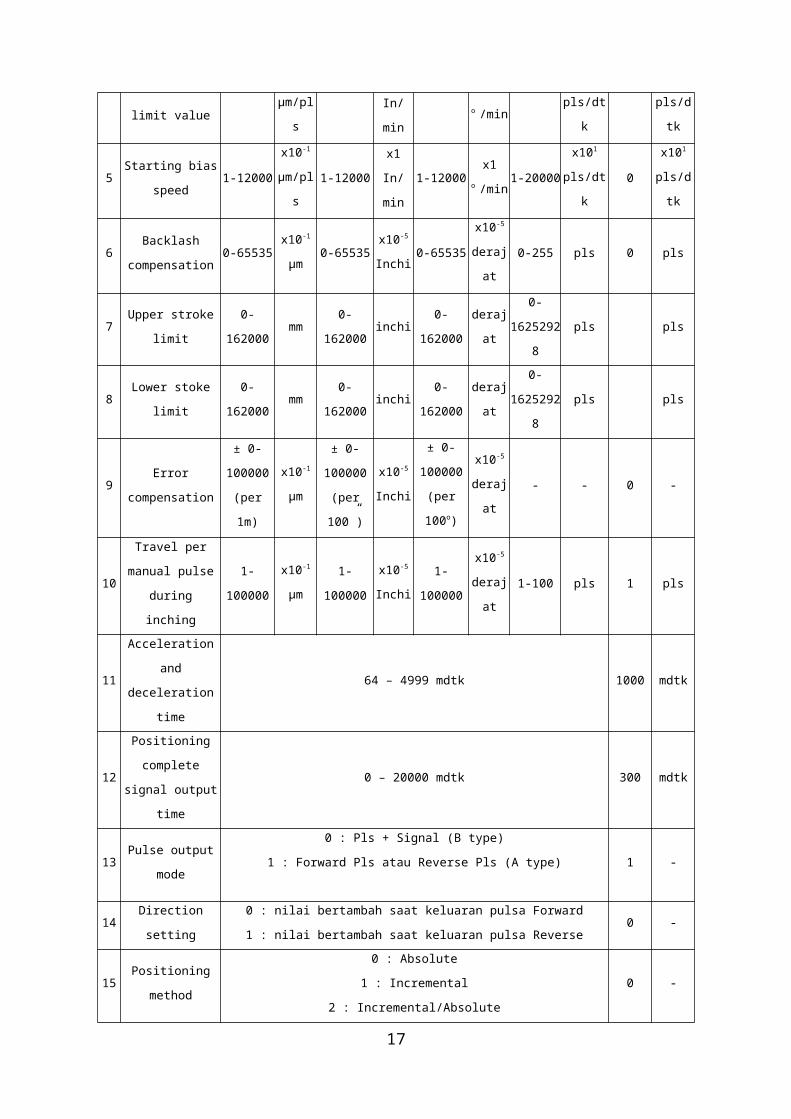
2.4. PARAMETER DATA pada AD71
No.Item
mm Inchi Sudut Pulsa Nilai default
Setting
rangeunit
Setting
rangeunit
Setting
rangeunit
Setting
rangeunit
Setting
rangeunit
1 Unit 0 - 1 - 2 - 3 - 3 -
2 Travel per pulsa 1-100x10-1
µm/pls1-100
x10-5
In/pls1-100
x10-5
o /pls- - - -
3 Speed limit value 1-12000x10-1
µm/pls1-12000
x1
In/min1-12000
x1o /min
1-20000x101
pls/dtk20000
x101
pls/dtk
4Jog speed limit
value1-12000
x10-1
µm/pls1-12000
x1
In/min1-12000
x1o /min
1-20000x101
pls/dtk2000
x101
pls/dtk
5 Starting bias speed 1-12000x10-1
µm/pls1-12000
x1
In/min1-12000
x1o /min
1-20000x101
pls/dtk0
x101
pls/dtk
6Backlash
compensation0-65535 x10-1 µm 0-65535
x10-5
Inchi0-65535
x10-5
derajat0-255 pls 0 pls
7Upper stroke
limit0-162000 mm 0-162000 inchi 0-162000 derajat
0-
16252928pls pls
8Lower stoke
limit0-162000 mm 0-162000 inchi 0-162000 derajat
0-
16252928pls pls
9 Error compensation
± 0-
100000
(per 1m)
x10-1 µm± 0-100000
(per 100”)
x10-5
Inchi
± 0-100000
(per 100o)
x10-5
derajat- - 0 -
10Travel per manual
pulse during inching1-100000 x10-1 µm 1-100000
x10-5
Inchi1-100000
x10-5
derajat1-100 pls 1 pls
11Acceleration and
deceleration time64 – 4999 mdtk 1000 mdtk
12
Positioning
complete signal
output time
0 – 20000 mdtk 300 mdtk
13Pulse output
mode
0 : Pls + Signal (B type)
1 : Forward Pls atau Reverse Pls (A type) 1 -
14 Direction setting0 : nilai bertambah saat keluaran pulsa Forward
1 : nilai bertambah saat keluaran pulsa Reverse0 -
15Positioning
method
0 : Absolute
1 : Incremental
2 : Incremental/Absolute
0 -
16M code On/Off
Timing
0 : M code tdk dipakai
1 : M code dipakai
0 : WITH Mode
1 : AFTER Mode0 -
Tabel Parameter Data pada AD71
13
Keterangan :
1. Unit
Pilihan unit (mm, degree, atau pulsa) untuk positioning kontrol,
dapat kita atur secara bebas pada X dan Y axis (X axis = mm, Y
axis = degree).
2. Travel per pulsa
Menentukan jarak tiap pulsa dengan mekanik pada sistem.
Mengontrol nomor pada pulsa yang berisi deretan pulsa dari
AD71.
3. Speed limit value
Menentukan kecepatan maksimum pada positioning (atau zeroing).
Ketika positioning speed dieksekusi, nilai batas maksimal speed
tergantung pada settingan parameter.
Ketika kecepatan baru dipanggil selama positioning oleh program
sequence dan kecepatan ini lebih besar dari pada speed limit value.
Maka kecepatan dibatasi pada value di parameter.
4. Jog speed limit value
Menentukan kecepatan maksimum untuk operasi jog.
Jog limit value berada dalam range yang ditampilkan dalam tabel
diatas dan tidak harus melebihi speed limit value.
Ketika kecepatan pelan (jog) diatur menggunakan A6GPP atau
program sequence lebih besar dari pada jog speed limit value.
Kecepatan pelan (jog) ditunjukan pada limit value.
5. Kecepatan starting bias
Kecepatan awal minimal diperlukan untuk gerakan yang lambat
pada beberapa motor (stepping motor). Ini mungkin diatur seperti
kecepatan starting bias.
Kecepatan starting bias digunakan untuk positioning, joging dan
zeroing. Lihat gambar di Melsec A, Positioning Module AD71
hal 3-11 gambar 3.3.
14
6. Penggantian backslash
Penggantian backslash dibolehkan untuk diprogram untuk ketelitian
positioning .
Catatan bahwa disitu juga ada penggantian kesalahan fasilitas
diperbolehkan dengan toleransi dalam mekanikal drive, dapat
dilihat pada poin (9).
Pengertian fasilitas backslash membolehkan penambahan pulsa
untuk setiap saat menghasilkan arah perubahan pergerakan selama
positioning. Selama pulsa inching output memulai nomor pada
input pulsa yang melebihi jumlah penggantian backslash saat arah
diganti. (jika jarak langkah kurang daripada penggantian blackslash
tidak akan menghasilkan pulsa tapi perhitungan AD71 sesudah itu
sesuai positioning untuk penambahan data). Selama gerakan joging
penggantian backslash dibuat untuk memindahkan yang pertama
setelah merubah arah.
Penggantian backslash tersedia setelah zeroing, setelah penggantian
blackslash sistem selalu zero.
Lihat gambar di Melsec A, Positioning Module AD71 hal 3-12
gambar 3.4
7. Upper stroke limit
Menentukan batas atas value pada menjalankan mesin.
Puncak batasan diperiksa sebelum gerakan positioning dan jika
setingan diluar range, positioning berhenti. Selama gerakan joging
pulsa inching, pembatas puncak diabaikan.
8. Lower stroke limit
Batas bawah dari limit value pada mesin.
Puncak batasan diperiksa sebelum gerakan positioning dan jika
diluar range yang diperbolehkan, positioning berhenti. Selama
gerakan joging pulsa inching, pembatasa diabaikan.
9. Error compensation
AD71 mungkin menyesuaikan untuk kesalahan mekanik dalam sistem.
Fasilitas ini menyediakan penggantian error parameter dan terdapat
(contoh)
15
1) Atur compensation error ke 0
2) Program AD71 untuk menyediakan 1000 mm jalan (travel).
3) Mengukur jarak jalan (travel) secara nyata.
4) Hitung error, E, seperti E = 1m – hasil pengukuran (dalam mm).
5) Atur E sebagai ganti parameter error (dalam unit 10-1 m).
6) Jika menggunakan inchi sesuaikan jarak yaitu 100 inchi, dan untuk
derajat.
Hasil perhitungan error compensation AD71 seperti dibawah ini:
Dimana, S = jarak jalan (travel) sesuai AD71
m = jarak pengukuran pada S
E = perbedan perhitungan
n = 104ketika satuan unit mm
= 105ketika satuan inchi -5 atau derajat -5
Penggantian error tersedia pada panduan pulsa inching, joging dan
pelaksanaan positioning.
Penggantian blackslash akan diatur sesuai dengan penjelasan
dibawah ini:
Bc = B x E
Dimana, B = actual blackslash
E = seperti yang diatas.
10. Penambahan perjalanan Manual Pulser Inching
- Menentukan jarak perjalanan setiap saat memberikan perintah
pulsa inching.
- AD71 menghitung nomor pada masukan Manual perintah pulsa inching dan
mengirim nomor secara tepat pada keluaran pulsa (kecepatannya tetap 20000
pls/sec)
- Selama Manual pulsa inching, acceleration / decelarationnya tidak otomatis.
11. Waktu Acceleration / Decelaration
- Definisi waktu saat start pada positioning ketika mencapai hasil spesifikasi
batasan kecepatan dalam parameter.
16
- Waktu acceleration / decelaration tidak dapat diset secara bebas.
- Ketika kecepatan positioning lebih rendah daripada batasan parameter, waktu
acceleration / decelaration termasuk pendek.
- Waktu acceleration / decelaration berada pada operasi zeroing, positioning dan
gerakan joging.
- Untuk penambahan positioning, waktu acceleration / decelaration pada axis
dengan travel yang tersedia lebih panjang. (Waktu acceleration / decelaration
untuk mengabaikan axis yang lain).
Lihat keterangan gambar di AD71 Positioning Module hal 3-13 gambar 3.5
12. Durasi Positioning Complete Signal
Atur durasi pada “Positioning Complete Signal” dari AD71. Positioning
dipertimbangkan untuk menjadi lengkap setelah AD71 mengakhiri keluaran
pulsa dan sebelum Dwell Time selesai.
13. Mode Pulsa Output
Menentukan Mode output seperti type A atau Type B.
- Pulsa forward atau pulsa reverse, rentetan dua pulsa.
- PLS + SIGN
17
Forward feed pulse
Reverse feed pulse
PULSA F
PULSA R
PULSA F
PULSA R
A Type

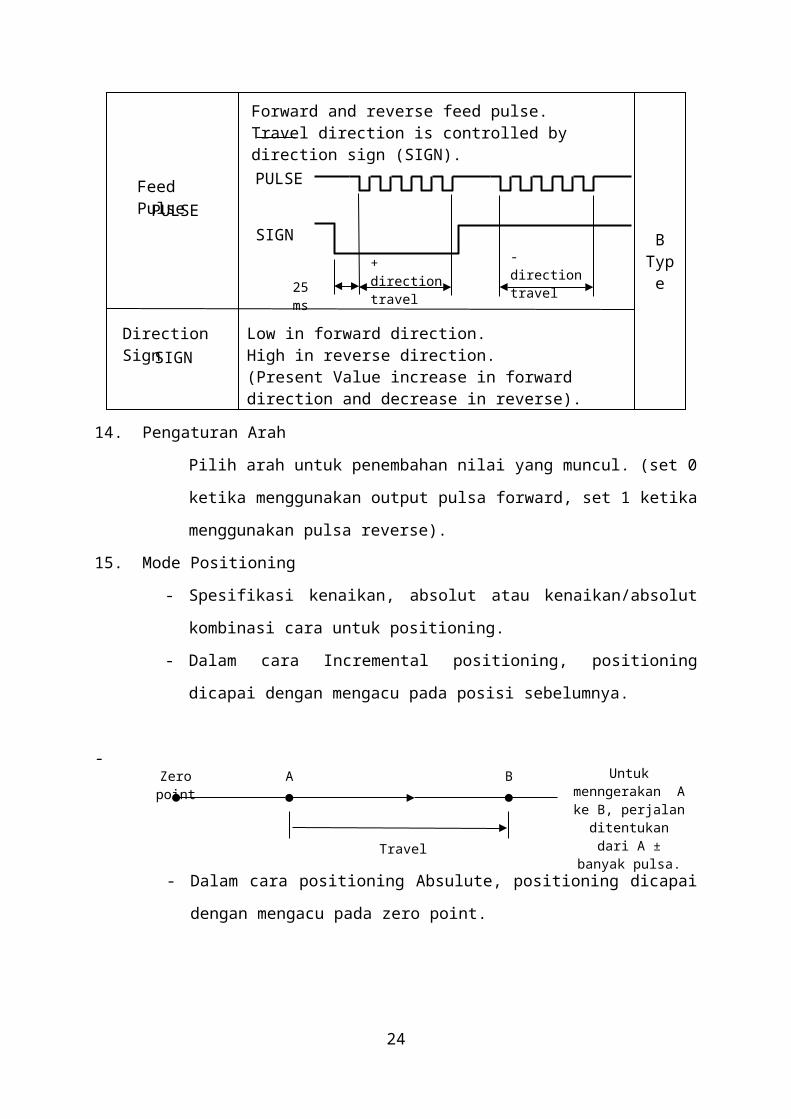
14. Pengaturan Arah
Pilih arah untuk penembahan nilai yang muncul. (set 0 ketika menggunakan
output pulsa forward, set 1 ketika menggunakan pulsa reverse).
15. Mode Positioning
- Spesifikasi kenaikan, absolut atau kenaikan/absolut kombinasi cara untuk
positioning.
- Dalam cara Incremental positioning, positioning dicapai dengan mengacu pada
posisi sebelumnya.
-
- Dalam cara positioning Absulute, positioning dicapai dengan mengacu pada
zero point.
- Untuk menggunakan keduanya Incremental dan cara Absolute dalam axis yang
sama (x axis) diset 2. pada bagian ini adalah cara mengendalikan setiap bagian
individu pada positioning data.
18
Feed PulsePULSE
Forward and reverse feed pulse.Travel direction is controlled by direction sign (SIGN).
PULSE
SIGN
+ direction travel
- direction travel
25 ms
Direction SignSIGN
B Type
Low in forward direction.High in reverse direction.(Present Value increase in forward direction and decrease in reverse).
Zero point A B
Travel
Untuk menngerakan A ke B, perjalan
ditentukan dari A ± banyak pulsa.
Zero point A B
Address 50
Untuk bergerak ke B, perjalan
ditentukan dari zero point
Address 100
16. M Code On / Off Timing
Code M adalah code nomor (1 sampai 255) yang menentukan pengguna untuk mengontrol
fungsi auxilary untuk menetapkan titik pada cycle positioning. Ini digunakan oleh PC CPU
untuk menggerakkan koordinat pada perlengkapan luar dan proses.
- M code digunakan atau tidak digunakan harus diteliti dengan spesifikasi yang
sama dimana digunakan dalam rangkaian positioning. Ketika data M code
tidak menggunakan spesifikasi A6GPP test mode dalam bergerak data M code
dalam memory buffer diclearkan dan” kode M ON” signal tidak keluar.
- “Kode M On” signal output tersedia dalam dua macam waktu .WITH dan
AFTER.
- Cara WITH
Ketika M On signal memberikan waktu yang kira – kira
sama seperti start gerakan positioning.
- AFTER mode
M code On signal diberikan setelah gerakan positioning
selesai. Dalam cara inin jika gerakan dihentikan sebelum
signal M code On lengkap tidak diberikan.
Lihat melsec A AD71 positioning module hal 3-15 s/d 3-16 untuk keterangan gambar timing
M Code WITH dan AFTER.
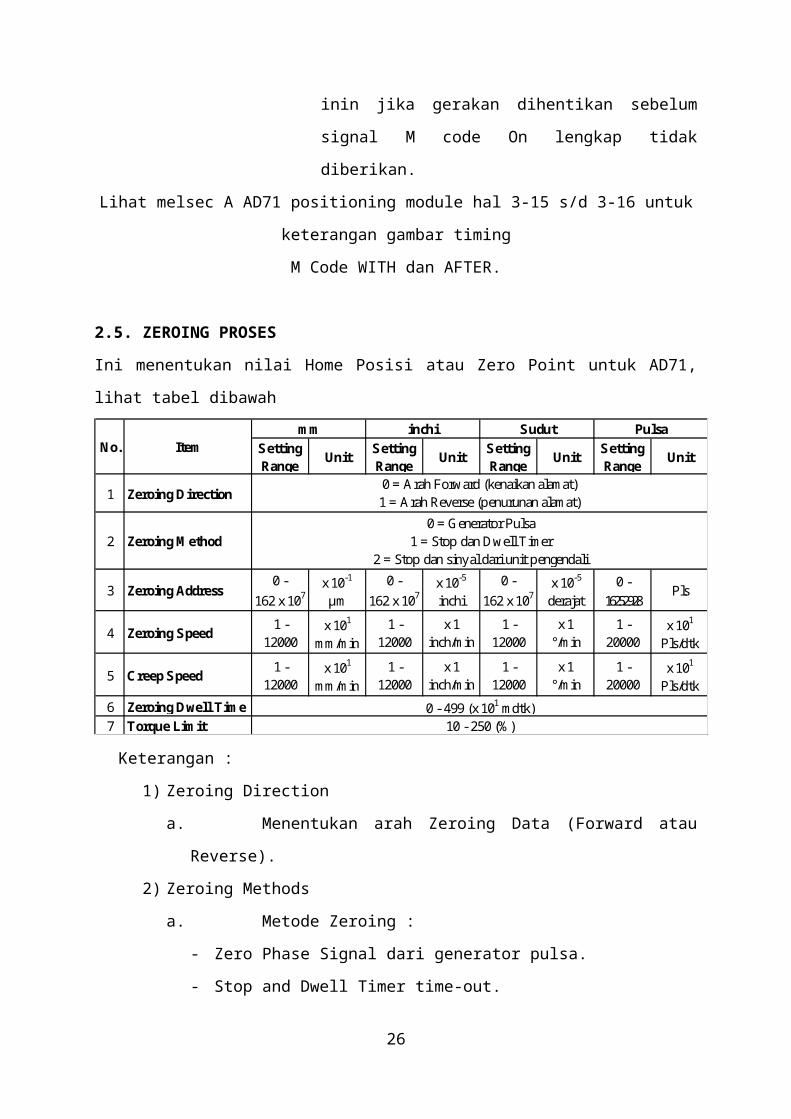
2.5. ZEROING PROSES
Ini menentukan nilai Home Posisi atau Zero Point untuk AD71, lihat tabel dibawah
19
Setting Range
UnitSetting Range
UnitSetting Range
UnitSetting Range
Unit
1 Zeroing Direction
2 Zeroing Method
3 Zeroing Address0 -
162 x 107x 10-1
µm0 -
162 x 107x 10-5
inchi0 -
162 x 107x 10-5
derajat0 -
16252928 Pls
4 Zeroing Speed1 -
12000x 101
mm/min1 -
12000x 1
inch/min1 -
12000x 1
°/min1 -
20000x 101
Pls/dtk
5 Creep Speed1 -
12000x 101
mm/min1 -
12000x 1
inch/min1 -
12000x 1
°/min1 -
20000x 101
Pls/dtk6 Zeroing Dwell Time7 Torque Limit
No. Itemmm inchi
10 - 250 (%)0 - 499 (x 101 mdtk)
Sudut Pulsa
0 = Arah Forward (kenaikan alamat)1 = Arah Reverse (penurunan alamat)
0 = Generator Pulsa1 = Stop dan Dwell Timer
2 = Stop dan sinyal dari unit pengendali
Keterangan :
1) Zeroing Direction
a. Menentukan arah Zeroing Data (Forward atau Reverse).
2) Zeroing Methods
a. Metode Zeroing :
- Zero Phase Signal dari generator pulsa.
- Stop and Dwell Timer time-out.
- Stop dan sinyal dari unit penggerak.
3) Zeroing Address
a. Alamat ini diset sebagai alamat Home Position saat Zeroing sedang
dijalankan.
b. Set-lah alamat Zeroing sama dengan nilai dari settingan Upper atau
Lower Stroke Limit pada parameter.
4) Zeroing Speed
Menentukan kecepatan dari Zeroing.
5) Creep Speed
a. Creep Speed adalah kecepatan pelan sebelum mencapai Home
Position.
20
Zeroing Speed Deceleration
Creep Speed

Kecepatan Zeroing dan Kecepatan Pelan
b. Kecepatan ini harus diset dengan pertimbangan untuk menghindari
error saat Zeroing dijalankan.
6) Zeroing Dwell Time
a. Zeroing Dwell Time adalah perioda waktu saat aktuator digerakkan sampai
Home Positioning selesai dilaksanakan.
7) Torsi limit
a. Mengatur batas dari torsi setelah kecepatan pelan dicapai.
Zeroing Area
2.6. POSITIONING DATA
Data positioning digunakan dalam AD71 untuk melaksanakan perintah Positioning.
Data dari Positioning disimpan dalam Buffer Memory AD71. Data Positioning diperiksa
ketika positioning dimulai.
No Item Setting Data
1 Positioning
21
Zeroing Speed79247914
Zero Address7922
Alamat Y Axis
7912
Alamat X Axis
Zeroing Dwell Time79267916
79297918
79317921
Zeroing Creep Speed79257915
Area Tak Terpakai
B0B4B15
79237913
Torque Limit
Zeroing Information
79277917
79297918Dapat diset dengan 1 atau 0 (diabaikan)
Metode Penghentian Mekanik 0 : Stop & dwell timer time out 1 : Stop & signal from drive unit Arah Zeroing 0 : Forward 1 : Reverse
Zeroing Method 0 : PG signal 1 : Mechanical Stop
Information
mm inchi sudut pulsa
Setting
RangeUnit
Setting
RangeUnit
Setting
RangeUnit
Setting
RangeUnit
2 Positioning
Speed
1 –
12000
x101
mm/min
1 -
12000
x1
in/min
1 -
12000
x1
°/min
1 -
20000
x101
pls/dtk
3Positioning
Address
0 –
162 x
107
x10-1
µm
0 –
162 x
107
x10-5
inchi
0 –
162 x
107
x10-5
derajat
0 –
162
52928
Pls
4 Dwell
Time0 sampai 499 (x101 mdtk)
Keterangan :
1) Positioning Information
a. Positioning Information (Informasi Positioning) terdiri dari 16 bit yang antara
lain terbagi menjadi 2 bit pertama untuk Positioning Pattern (Pola Positioning), 1
bit selanjutnya untuk Positioning Method (Metode Positioning), 1 bit selanjutnya
untuk Positioning Direction (Arah Positioning), 4 bit selanjutnya yaitu area tak
terpakai, dan 8 bit terakhir digunakan untuk M Code. M Code dapat digunakan
ataupun tidak, jika tidak digunakan, maka isilah 8 bit teratas ini dengan nilai 0.
b. Positioning Pattern (Pola Positioning)
Digunakan untuk mengeset pengoperasian Positioning terus berlanjut atau
berhenti. Ada 4 pengesetan pola, yaitu :
- 00 : Positioning End (Terminated)
Menggerakkan ke suatu alamat yang telah ditentukan.
- 01 : Positioning Continued
Positioning dicapai berurutan dengan satu kali perintah dan dengan arah yang
berbeda setelah mencapai Dwell Time.
- 11 : Positioning Continued With Speed Change
22

Positioning dicapai berurutan dengan satu kali perintah dan dengan arah yang
sama atupun dengan arah yang berbeda.
- 10 : No Setting, Tidak ada settingan
c. Positioning Method (Metode Positioning)
Pengesetan untuk metode Positioning, dapat secara Absolute ataupun secara
Incremental. Cara pengesetan :
- 0 : Absolute
- 1 : Incremental
d. Positioning Direction (Arah positioning)
Pada metode Positioning Incremental, arah dari Posirioning harus ditentukan.
Cara penentuan arah :
- 0 : Forward Direction (alamat bertambah)
- 1 : Reverse Direction (alamat berkurang)
Sedangkan untuk metode Positioning Absolute, arah dari Positioning diabaikan.
2) Positioning Speed
a. Digunakan untuk mengeset kecepatan dari Positioning yang akan dijalankan,
3) Positioning Address
a. Alamat dari Positioning diset sesuai dengan metode Positioning (Absolute atau
Incremental).
4) Dwell Time
a. Dwell Time adalah waktu jeda setelah Positioning selesai dilaksanakan sampai
sinyal Busy dari AD71 padam.
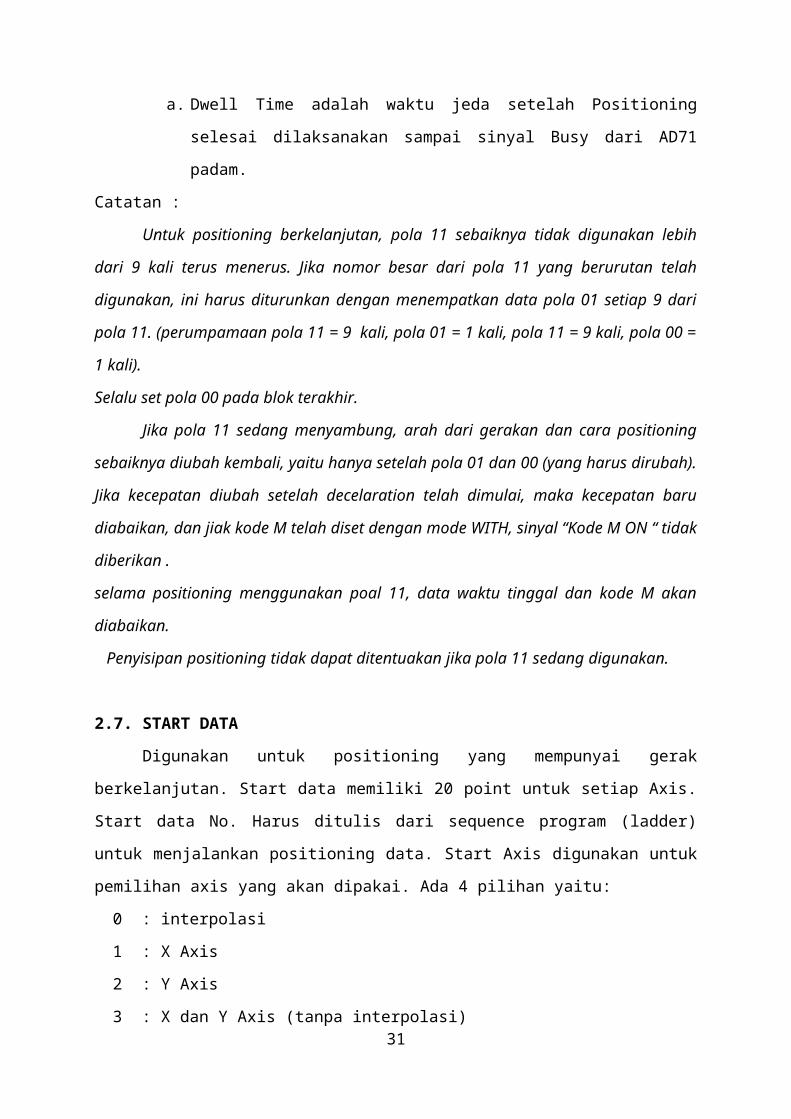
Catatan :
Untuk positioning berkelanjutan, pola 11 sebaiknya tidak digunakan lebih dari 9 kali
terus menerus. Jika nomor besar dari pola 11 yang berurutan telah digunakan, ini harus
diturunkan dengan menempatkan data pola 01 setiap 9 dari pola 11. (perumpamaan pola 11
= 9 kali, pola 01 = 1 kali, pola 11 = 9 kali, pola 00 = 1 kali).
Selalu set pola 00 pada blok terakhir.
Jika pola 11 sedang menyambung, arah dari gerakan dan cara positioning sebaiknya
diubah kembali, yaitu hanya setelah pola 01 dan 00 (yang harus dirubah). Jika kecepatan
diubah setelah decelaration telah dimulai, maka kecepatan baru diabaikan, dan jiak kode M
telah diset dengan mode WITH, sinyal “Kode M ON “ tidak diberikan .
selama positioning menggunakan poal 11, data waktu tinggal dan kode M akan diabaikan.
Penyisipan positioning tidak dapat ditentuakan jika pola 11 sedang digunakan.
23
2.7. START DATA
Digunakan untuk positioning yang mempunyai gerak berkelanjutan. Start data
memiliki 20 point untuk setiap Axis. Start data No. Harus ditulis dari sequence program
(ladder) untuk menjalankan positioning data. Start Axis digunakan untuk pemilihan axis yang
akan dipakai. Ada 4 pilihan yaitu:
0 : interpolasi
1 : X Axis
2 : Y Axis
3 : X dan Y Axis (tanpa interpolasi)
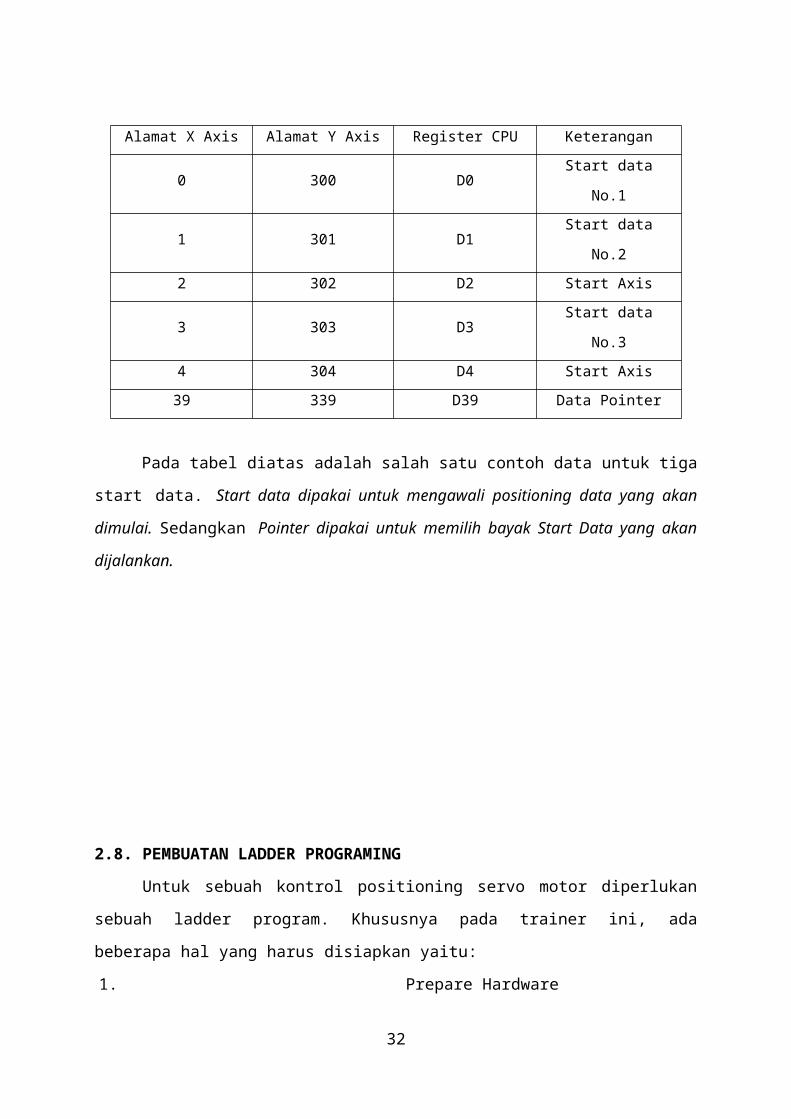
Alamat X Axis Alamat Y Axis Register CPU Keterangan
0 300 D0 Start data No.1
1 301 D1 Start data No.2
2 302 D2 Start Axis
3 303 D3 Start data No.3
4 304 D4 Start Axis
39 339 D39 Data Pointer
Pada tabel diatas adalah salah satu contoh data untuk tiga start data. Start data dipakai
untuk mengawali positioning data yang akan dimulai. Sedangkan Pointer dipakai untuk
memilih bayak Start Data yang akan dijalankan.
2.8. PEMBUATAN LADDER PROGRAMING
Untuk sebuah kontrol positioning servo motor diperlukan sebuah ladder program.
Khususnya pada trainer ini, ada beberapa hal yang harus disiapkan yaitu:
1. Prepare Hardware
24

Dalam ladder yang akan dibuat, ada beberapa eksternal relay yang harus di ON kan
antara lain adalah:
a. Y6D untuk menyalakan Servo Amplifier
b. Y62 sebagai signal Servo ON
c. Y63 sebagai signal Reset
d. Y64 sebagai signal LSP
e. Y65 sebagai signal LSN
f. Y60 sebagai signal DOG
g. Y61 sebagai signal STOP
Ladder Prepare Hardware
2. ERROR AREA
Bagian ini diperlukan untuk membaca error yang terdeteksi dan mereset error tersebut.
25
K201 adalah alamat error reset yang terdapat pada buffer memory AD71, K45 adalah alamat
untuk membaca error yang terdeteksi. Untuk lebih jelasnya bisa dilihat dibuku User manual
AD71 pada bab Programing.
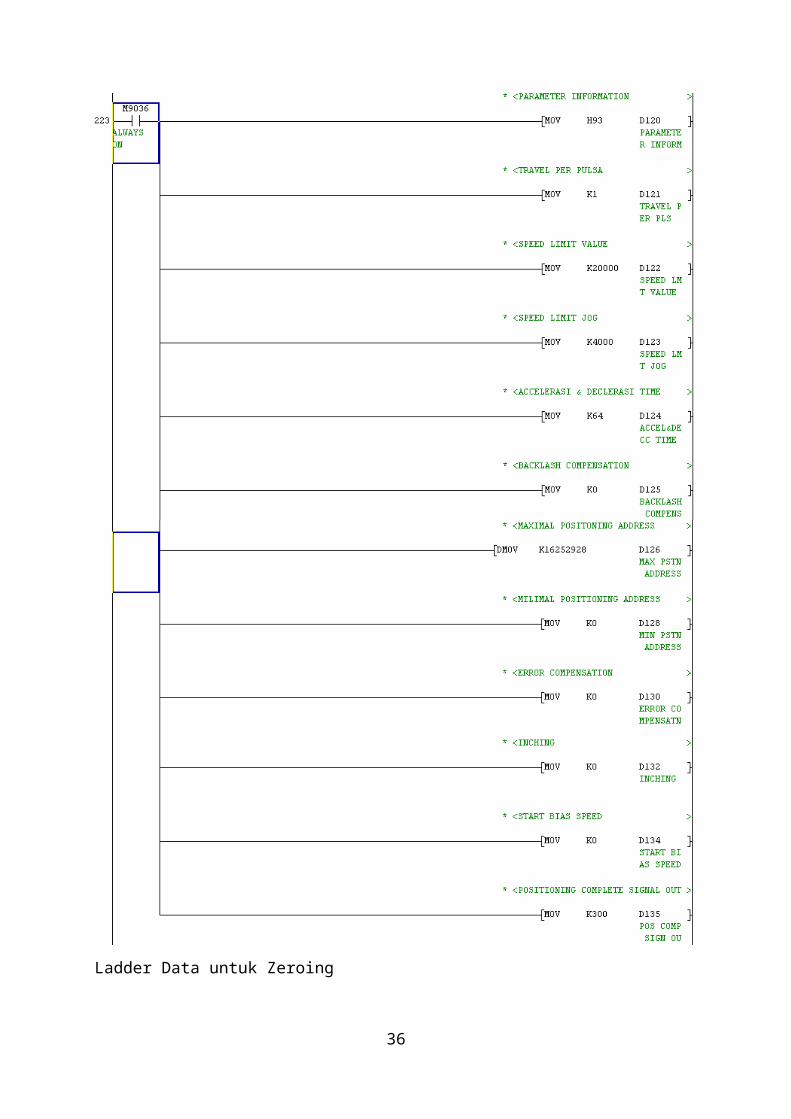
3. PARAMETER DATA AREA
Ladder ini dibuat untuk menyiapkan alamat buffer AD71 untuk di Read atau Write.
Semua parameter yang diperlukan harus disiapkan dalam ladder ini.
Ladder ini menggunakan sebuah register agar data – data yang dimasukan ( Write ) bisa
dirubah sesuai dengan setingan yang diinginkan.
26

Perintah TO diatas adalah perintah untuk proses write (menulis) ke alamat buffer memory
AD71 dari CPU. Dimana data – data yang dituliskan secara tidak langsung, jadi melalui
sebuah register. Ladder data seperti dibawah ini.
27

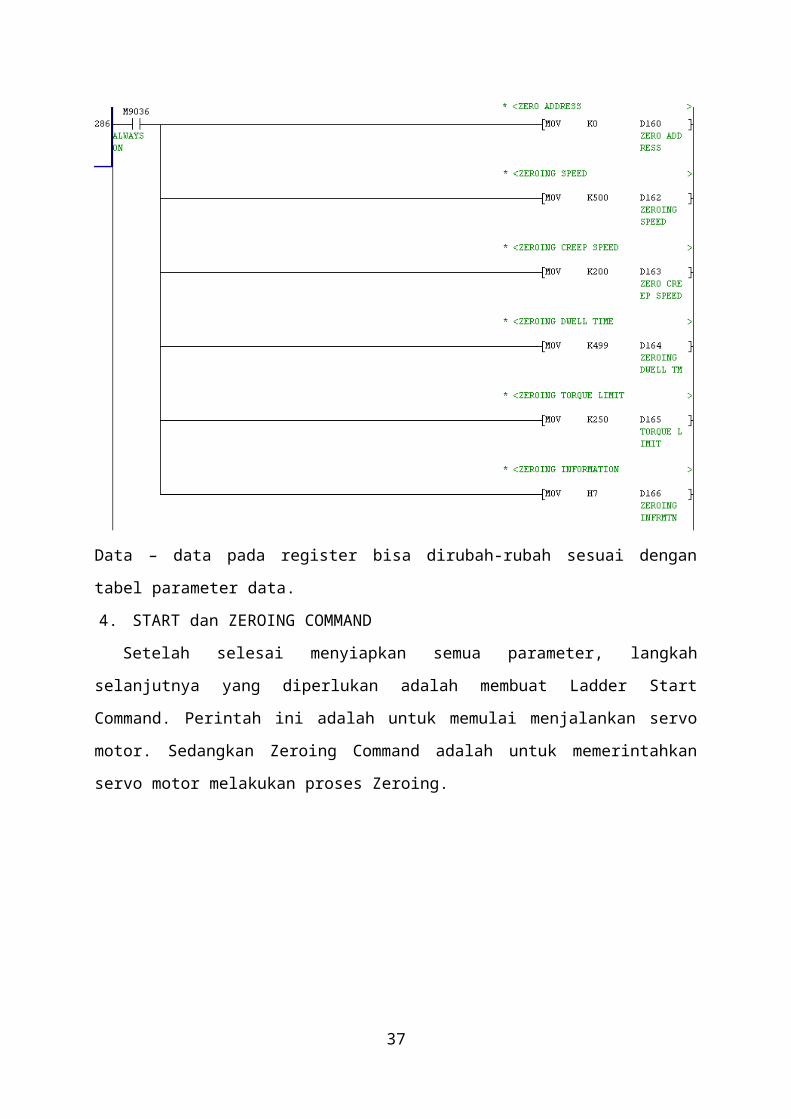
Ladder Data untuk Zeroing
Data – data pada register bisa dirubah-rubah sesuai dengan tabel parameter data.
4. START dan ZEROING COMMAND
Setelah selesai menyiapkan semua parameter, langkah selanjutnya yang diperlukan
adalah membuat Ladder Start Command. Perintah ini adalah untuk memulai menjalankan
servo motor. Sedangkan Zeroing Command adalah untuk memerintahkan servo motor
melakukan proses Zeroing.
28

Contoh Ladder pada bagian Start Data dan Zeroing
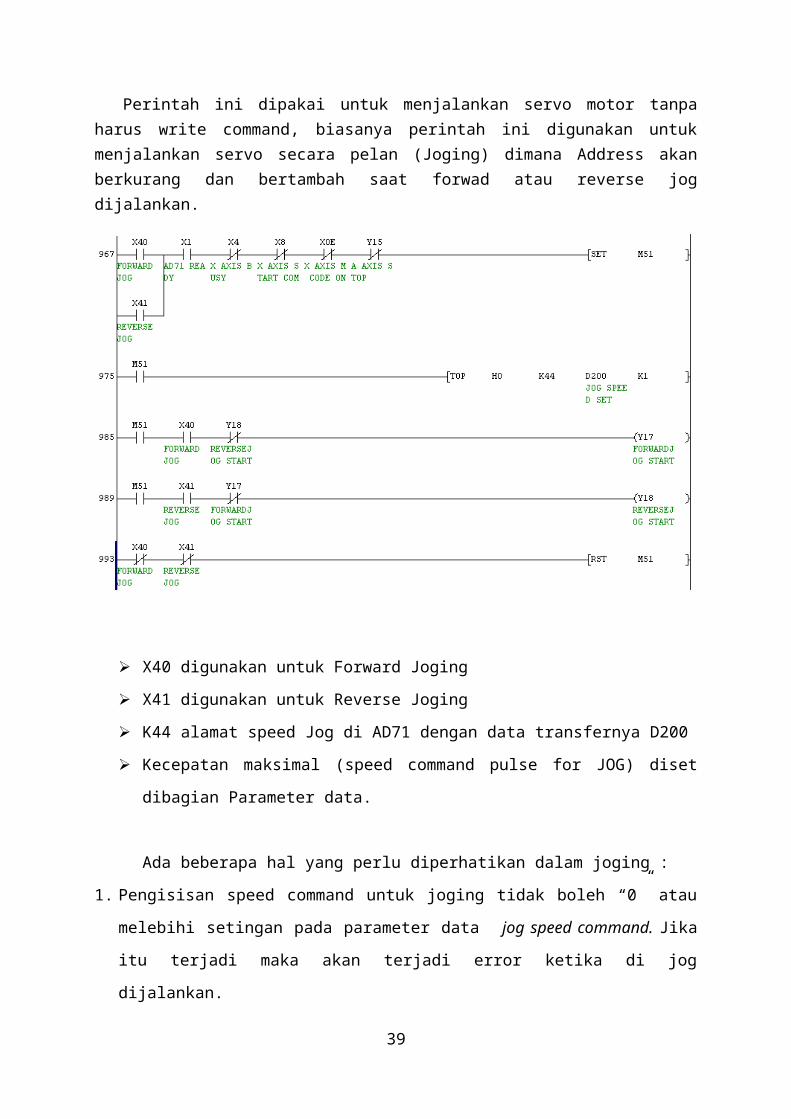
5. JOG COMMAND
Perintah ini dipakai untuk menjalankan servo motor tanpa harus write command, biasanya perintah ini digunakan untuk menjalankan servo secara pelan (Joging) dimana Address akan berkurang dan bertambah saat forwad atau reverse jog dijalankan.
29

X40 digunakan untuk Forward Joging
X41 digunakan untuk Reverse Joging
K44 alamat speed Jog di AD71 dengan data transfernya D200
Kecepatan maksimal (speed command pulse for JOG) diset dibagian Parameter data.
Ada beberapa hal yang perlu diperhatikan dalam joging :
1. Pengisisan speed command untuk joging tidak boleh “0” atau melebihi setingan pada
parameter data jog speed command. Jika itu terjadi maka akan terjadi error ketika di jog
dijalankan.
2. Ketika signal LSP atau LSN, servo motor akan berhenti akan tetapi Address akan
bertambah(forward) atau berkurang(reverse).
2.9. SETTINGAN PARAMETER PADA SERVO AMPLIFIER MR-J20A
Selain settingan pada Program PLC, pada Servo Amplifier pun perlu diseting. Untuk
setiap mode memerlukan setingan yang berbeda.
2.9.1. Set parameter untuk Positioning Servo (default)
30
Clas
sPr. Abb. Name
Initial
ValueUnit Range
Use
r par
amet
er0 *MTY Motor Type ####
1 *STY
Servo Loop(1) Positioning/speed servo(2) Regeneratif resistor option(3) Auto tuning
0000 0-7359h
2 CMXCommand pulse multiplication (pembilang) electronic gear
1 1-9999
3 CDVCommand pulse multiplication (penyebut) electronic gear
1 1-9999
4 INP In-position range 100 pulsa 0-9999
5 PGN Position loop gain 25 Rad/s 5-150
6 - spare 0
Spec
ial p
aram
eter
7 *OPS
Option funtion(1) Commandpulse input format(2) Command pulse input signal logic(3) Speed propotional command valid
0000 0-111Fh
8 FFC Feed forward gain 0 % 0-1009 - Spare 0
10 PST Position command acceleration/deceleration time constant
0 10ms(1ms)0-999
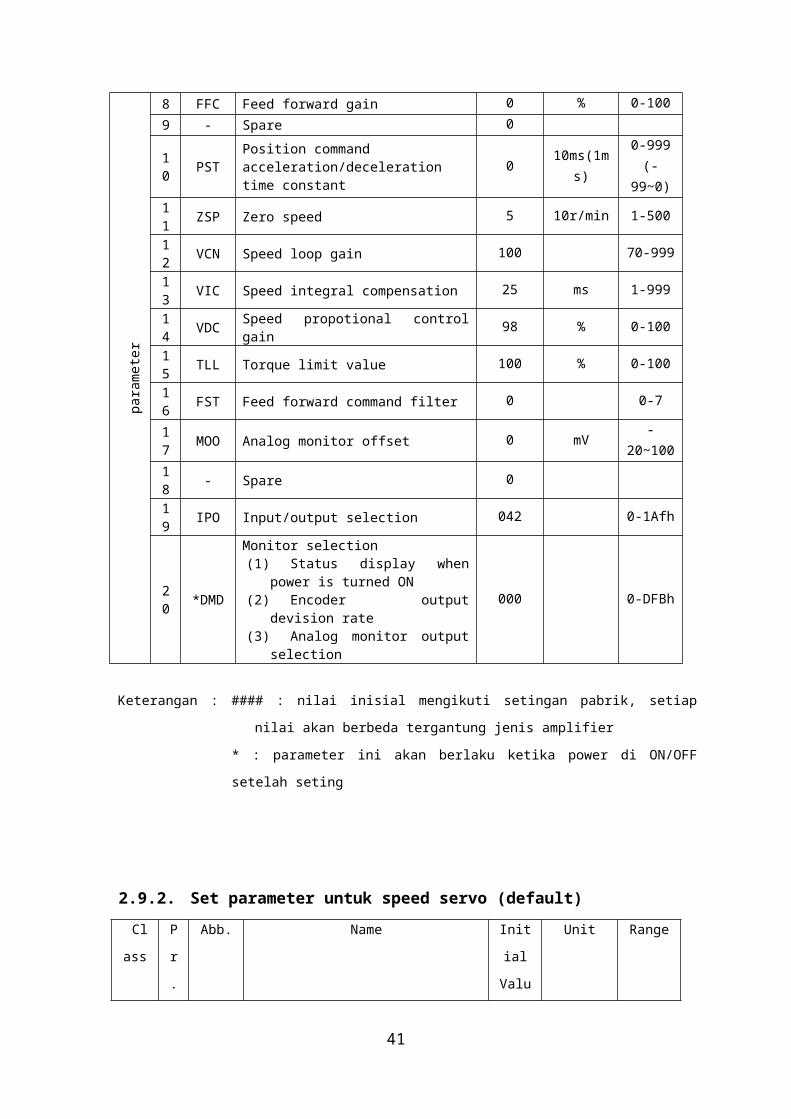
(-99~0)11 ZSP Zero speed 5 10r/min 1-50012 VCN Speed loop gain 100 70-99913 VIC Speed integral compensation 25 ms 1-99914 VDC Speed propotional control gain 98 % 0-10015 TLL Torque limit value 100 % 0-10016 FST Feed forward command filter 0 0-717 MOO Analog monitor offset 0 mV -20~10018 - Spare 019 IPO Input/output selection 042 0-1Afh
20 *DMD
Monitor selection(1) Status display when power is turned
ON(2) Encoder output devision rate(3) Analog monitor output selection
000 0-DFBh
Keterangan : #### : nilai inisial mengikuti setingan pabrik, setiap nilai akan berbeda tergantung jenis
amplifier
* : parameter ini akan berlaku ketika power di ON/OFF setelah seting
2.9.2. Set parameter untuk speed servo (default)
Class Pr. Abb. NameInitial
ValueUnit Range
U 0 *MTY Motor Type ####
31
ser p
aram
eter
1 *STY
Servo Loop(4) Positioning/speed servo(5) Regeneratif resistor option(6) Auto tuning
0000 0-7359h
2 SC1 Internal speed command (1) 100 r/min0-max
speed
3 SC2 Internal speed command (2) 1000 r/min0-max
speed
4 SC3 Internal speed command (3) 2000 r/min0-max
speed
5 STC Acceleration time constant 20 10 ms 0-5000
6 STB Decelaration time constant 20 10 ms 0-5000
Spec
isl p
aram
eter
7 *OPS
Option funtion(4) Commandpulse input format(5) Command pulse input signal logic(6) Speed propotional command valid
0000 0-111Fh
8 SCH S-character acceleration/deceleration, curvature point speed
50 r/min 50-5000
9 VCM Speed at 10V command Rated r/min 0-600010 ZSP Zero speed 5 10r/min 1-50011 PGN Position loop gain 25 rad/s 5-15012 VGN Speed loop gain 100 70-99913 VIC Speed integral compensation 25 ms 1-99914 VDC Speed propotional control gain 98 % 0-10015 TLL Torque limit value 100 % 0-10016 VCO VC offset 0 mV -99~9917 MOO Analog monitor offset 0 mV -20~10018 - Spare 019 IPO Input/output selection 04E 0-1Afh
20 *DMD
Monitor selection(4) Status display when power is turned
ON(5) Encoder output devision rate(6) Analog monitor output selection
002 0-DFBh
Keterangan : #### : nilai inisial mengikuti setingan pabrik, setiap nilai akan berbeda tergantung jenis
amplifier
* : parameter ini akan berlaku ketika power di ON/OFF setelah seting
Yang perlu diperhatikan saat menyeting parameter adalah keadaan/kondisi servo
harus dalam keadaan OFF. Pada mode Speed tidak memerlukan special Unit AD71, hanya
memerlukan rangkaian sequence untuk menghubungkan terminal-terminal kontrol
kecepatannya.
32

BAB III
CARA PENGOPERASIAN
Pada bab ini akan dijelaskan mengenai cara pengoperasian trainer servo motor serta
beberapa hal yang harus diperhatikan sebelum menjalankan servo motor.
3.1 1st Prepare
Pertama, posisi servo motor tidak terhubung dengan roda gigi manapun.
Nyalakan PLC serta hardware laiannya
Turn ON servo Amplifier (X4D)
Cek parameter pada Ampli, statusnya pada positioning,(settingan Ampli ada pada
penjelasan sebelumnya).
Turn ON signal SON
Pastikan tidak ada error
Kondisi Reset dalam keadaan OFF
3.2 Pengoperasian untuk Mode Positioning
Down load terlebih dahulu ladder program untuk Positioning.
Seting parameter pada Ampli dalam Mode Positioning Servo.
Pada Touch Panel pilih unit yang akan dipakai, pilihan terdapat pada screen
sebelumnya, jika memilih unit Pulsa, posis servo motor bebas, selain itu posisikan
servo motor pada Unitnya.
33

Isikan nilai pada data parameter yang telah disediakan (POS.Inf, Dwell Time, Speed,
Address).
Isi start data, start data untuk menentukan Positioning keberapa yang akan dijalankan
(tergantung seberapa banyak Positioning yang akan dijalankan).
Isi Pointer, Pointer dipakai untuk menentukan Penggunaan Start Data (jika hanya satu
Start Data saja yang akan dijalankan maka nilai pointer “0”).
Tekan WRITE untuk proses penulisan data – data yang telah dimasukan ke alamat
AD71.
Tekan READ ERROR untuk melihat error yang muncul.
Jika tidak terjadi error (error code “0”) maka tidak ada kesalahan pada saat proses
WRITE.
Pastikan signal SON “ON” dan Servo Amplifier “ON”.
Tekan START untuk mulai menjalankan positioning.
Jika settingan data-data sesuai dengan batasan yang ditulis di Parameter, maka proses
akan berjalan dengan lancar.
Kemungkinan akan terjadi error yaitu saat START dimulai, saat Positioning
dijalankan, dan saat Positioning berakhir.
3.3 Pengoperasian untuk Mode Speed
Down load terlebih dahulu ladder program untuk Speed (untuk mode Speed
sebetulnya tidak perlu sebuah ladder program, dikarenakan pada panel trainer ini relay
– relay dikontrol dari PLC) .
Seting parameter pada Ampli dalam Mode Speed Servo
Posisikan servo motor tidak terhubung dengan roda gigi yang lain.
Nyalakan servo Amplifier, kemudian ubah setingan parameter Ampli menjadi mode
Speed.
Pada mode speed settingan kecepatan hanya diset di Ampli, baik menggunakan Digital
Input maupun Analog Input.
3.4 Aplikasi Unit-unit pada mode Positioning
Pada bab sebelumnya telah dijelaskan mengenai parameter – parameter yang ada di
AD71. Ada 4 Unit yang bisa dipakai yaitu Pulsa, Inchi , Milimeter, Derajat.
34

3.1 Unit Pulsa
Untuk mengoperasikan dalam unit Pulsa, langkah-langkahnya sebagai berikut:
Siapkan ladder terlebih dahulu.
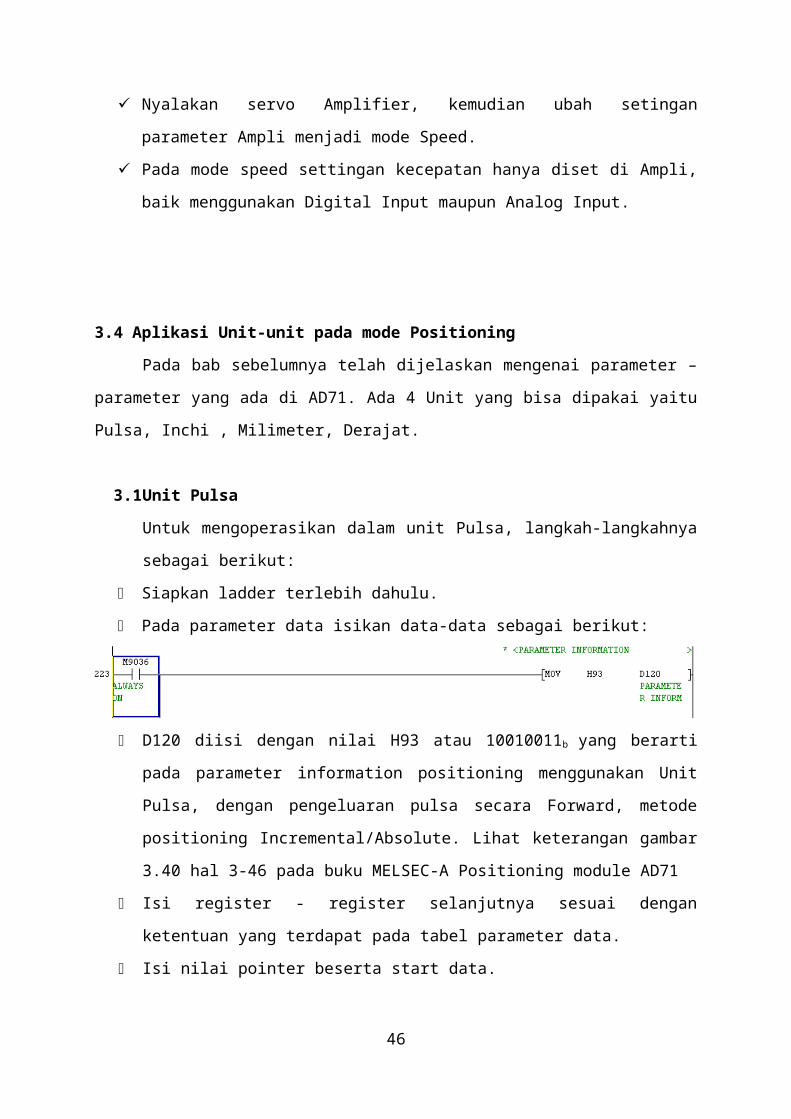
Pada parameter data isikan data-data sebagai berikut:
D120 diisi dengan nilai H93 atau 10010011b yang berarti pada parameter information
positioning menggunakan Unit Pulsa, dengan pengeluaran pulsa secara Forward,
metode positioning Incremental/Absolute. Lihat keterangan gambar 3.40 hal 3-46
pada buku MELSEC-A Positioning module AD71
Isi register - register selanjutnya sesuai dengan ketentuan yang terdapat pada tabel
parameter data.
Isi nilai pointer beserta start data.
Isi nilai pos.inf (positioning patern), speed command, dwell time dan address pada
masing-masing titik posisi.
Tekan write, pastikan tidak terjadi error.
Tekan start untuk mulai menjalankan.
3.2 Unit inchi
Untuk mengoperasikan dalam unit Inchi, langkah-langkahnya sebagai berikut:
Siapkan ladder terlebih dahulu.
Pada parameter data isikan data-data sebagai berikut:
D120 diisi dengan nilai H91 atau 10010001b yang berarti pada parameter information
positioning menggunakan Unit inchi, dengan pengeluaran pulsa secara Forward,
metode positioning Incremental/Absolute. Lihat keterangan gambar 3.40 hal 3-46
pada buku MELSEC-A Positioning module AD71
Isi register - register selanjutnya sesuai dengan ketentuan yang terdapat pada tabel
parameter data.
Isi nilai pointer beserta start data.
Isi nilai pos.inf (positioning patern), speed command, dwell time dan address pada
masing-masing titik posisi.
Tekan write, pastikan tidak terjadi error.
35
Tekan start untuk mulai menjalankan.
3.3 Unit milimeter
Untuk mengoperasikan dalam unit milimeter, langkah-langkahnya sebagai berikut :
Siapkan ladder terlebih dahulu.
Pada parameter data isikan data-data sebagai berikut :
D120 diisi dengan nilai H90 atau 10010000b yang berarti pada parameter information
positioning menggunakan Unit mlimeter, dengan pengeluaran pulsa secara Forward,
metode positioning Incremental/Absolute. Lihat keterangan gambar 3.40 hal 3-46
pada buku MELSEC-A Positioning module AD71.
Isi register - register selanjutnya sesuai dengan ketentuan yang terdapat pada tabel
parameter data.
Isi nilai pointer beserta start data.
Isi nilai pos.inf (positioning patern), speed command, dwell time dan address pada
masing-masing titik posisi.
Tekan write, pastikan tidak terjadi error.
Tekan start untuk mulai menjalankan.
3.4 Unit Derajat
Untuk mengoperasikan dalam unit derajat, langkah-langkahnya sebagai berikut:
Siapkan ladder terlebih dahulu.
Pada parameter data isikan data-data sebagai berikut:
D120 diisi dengan nilai H92 atau 10010010b yang berarti pada parameter information
positioning menggunakan Unit derajat, dengan pengeluaran pulsa secara Forward,
metode positioning Incremental/Absolute. Lihat keterangan gambar 3.40 hal 3-46
pada buku MELSEC-A Positioning module AD71
Isi register - register selanjutnya sesuai dengan ketentuan yang terdapat pada tabel
parameter data.
Isi nilai pointer beserta start data
Isi nilai pos.inf (positioning patern), speed command, dwell time dan address pada
masing-masing titik posisi.
Tekan write, pastikan tidak terjadi error
Tekan start untuk mulai menjalankan.
36
3.5 Pengoperasian Speed Servo
Siapkan ladder program untuk mengaktifkan relay – relay yang terhubung ke Pin-pin
untuk mode Speed servo.
Set parameter pada Ampli, ubah nilai parameter 1 dengan nilai “0001”, ingat saat
menseting signal SON harus mati.
Matikan switch servo ampli ON, kemudian ON kan kembali, setelah itu set parameter
selanjutnya. Apabila sebelumnya telah pernah diseting untuk setingan mode Speed,
maka cukup parameter 1 saja yang dirubah, secara otomatis settingan parameter yang
lainnya sudah terset secara otomatis.
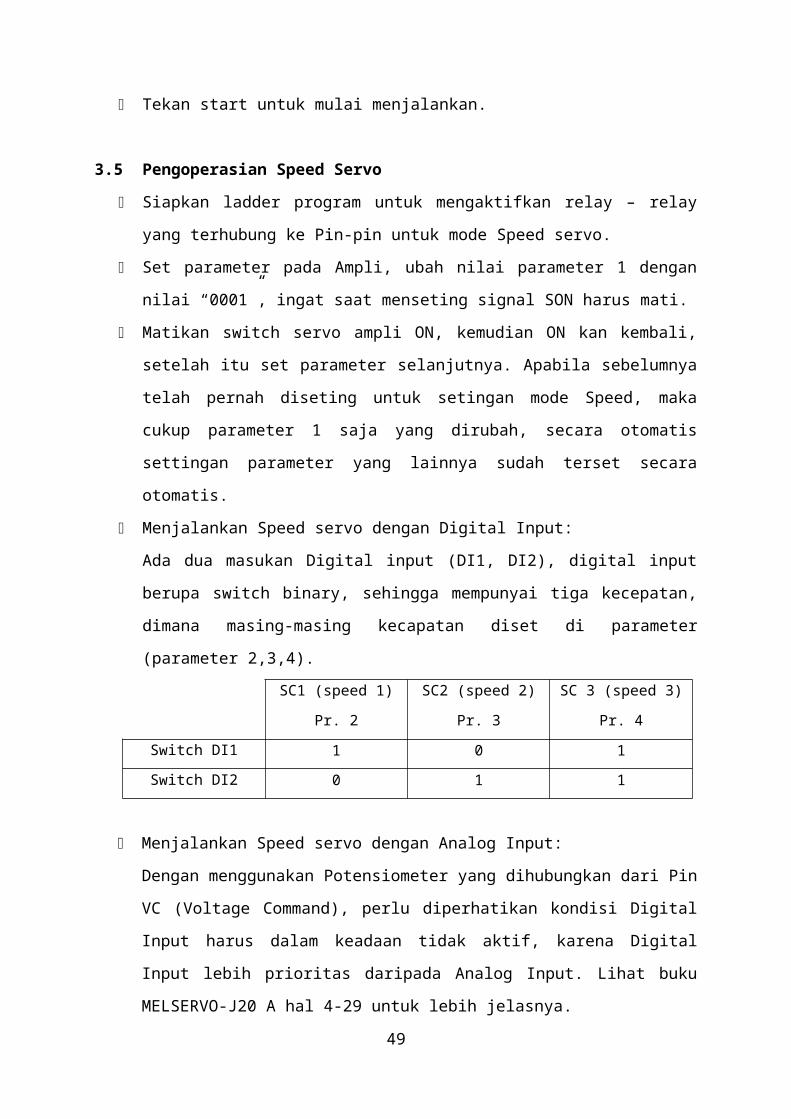
Menjalankan Speed servo dengan Digital Input:
Ada dua masukan Digital input (DI1, DI2), digital input berupa switch binary,
sehingga mempunyai tiga kecepatan, dimana masing-masing kecapatan diset di
parameter (parameter 2,3,4).
SC1 (speed 1) Pr. 2 SC2 (speed 2) Pr. 3 SC 3 (speed 3) Pr. 4
Switch DI1 1 0 1
Switch DI2 0 1 1
Menjalankan Speed servo dengan Analog Input:
Dengan menggunakan Potensiometer yang dihubungkan dari Pin VC (Voltage
Command), perlu diperhatikan kondisi Digital Input harus dalam keadaan tidak aktif,
karena Digital Input lebih prioritas daripada Analog Input. Lihat buku MELSERVO-
J20 A hal 4-29 untuk lebih jelasnya.
Dimana dalam range tegangan 10V, motor akan berputar maximal sesuai setingan max
pada parameter 9.
3.6 Kode Alarm
3.6.1 Kode Error Positioning Module AD71
37

Special Module AD71 mempunyai fasilitas untuk pemeriksaan error. Ketika terjadi error,
maka kode error akan ditulis kedalam Buffer Memory alamat 45 (X Axis) dan alamat 345 (Y
Axis).
Ada banyak sekali kode error yang dapat dideteksi, tapi semuanya dibagi kedalam enam
bagian utama, antara lain :
Kode Error Klasifikasi Error
1 sampai 46 Data range error
50 sampai 52 AD71 Hold error
60 sampai 64 Buffer Memory write disable error
70 sampai 79 AD71 start and operation error
80 sampai 81 AD71 Busy stop error
90 sampai 96 dan 140 Error lainnya
Tabel 3.1 Klasifikasi Error
1. Data Range Error
Kode
ErrorJenis Data Titik Pemeriksaan Range Pemeriksaan
0 Normal
1 Parameter Travel Per Pulse 1 sampai 100
2 Speed Limit Value
1 sampai 12.000 untuk mm,
inchi dan sudut.
1 sampai 20.000 untuk pulsa
3 Jog Speed Limit Value1 sampai nilai Speed Limit
Value
4 Starting Bias Speed0 sampai nilai Speed Limit
Value
5Acceleration and
Deceleration Times
64 sampai 4.999
6 Backlash
0 sampai 255 untuk pulsa
0 sampai 65.535 untuk mm,
inchi dan sudut
7 Upper Stroke Limit 0 sampai 162.000 untuk mm
0 sampai 16.200 untuk inchi
dam sudut
38
0 sampai 16.252.928 untuk
pulsa
8 Lower Stroke Limit0 sampai settingan Upper
Stroke Limit
9 Error Compensation0 sampai 100.000 untuk mm,
inchi dan sudut
10Travel Distance per Manual
Pulse
1 sampai 100.000 untuk mm,
inchi dan sudut
1 sampai 100 untuk pulsa
11 Positioning Method 00, 01, 10 pada bit 4 dan 3
12Positioning Complete
Signal Duration
0 sampai 20.000
20
Zero Return Data
Zero Address
0 sampai 1.620.000.000 untuk
mm, inchi, dan sudut
0 sampai 16.252.928 untuk
pulsa
21 Zero Return SpeedNilai Bias Speed sampai nilai
Speed Limit (bukan 0)
22 Creep SpeedNilai Bias Speed sampai Zero
Point Return (bukan 0)
23 Dwell Time 0 sampai 499
24 Torque Limit 10 sampai 250
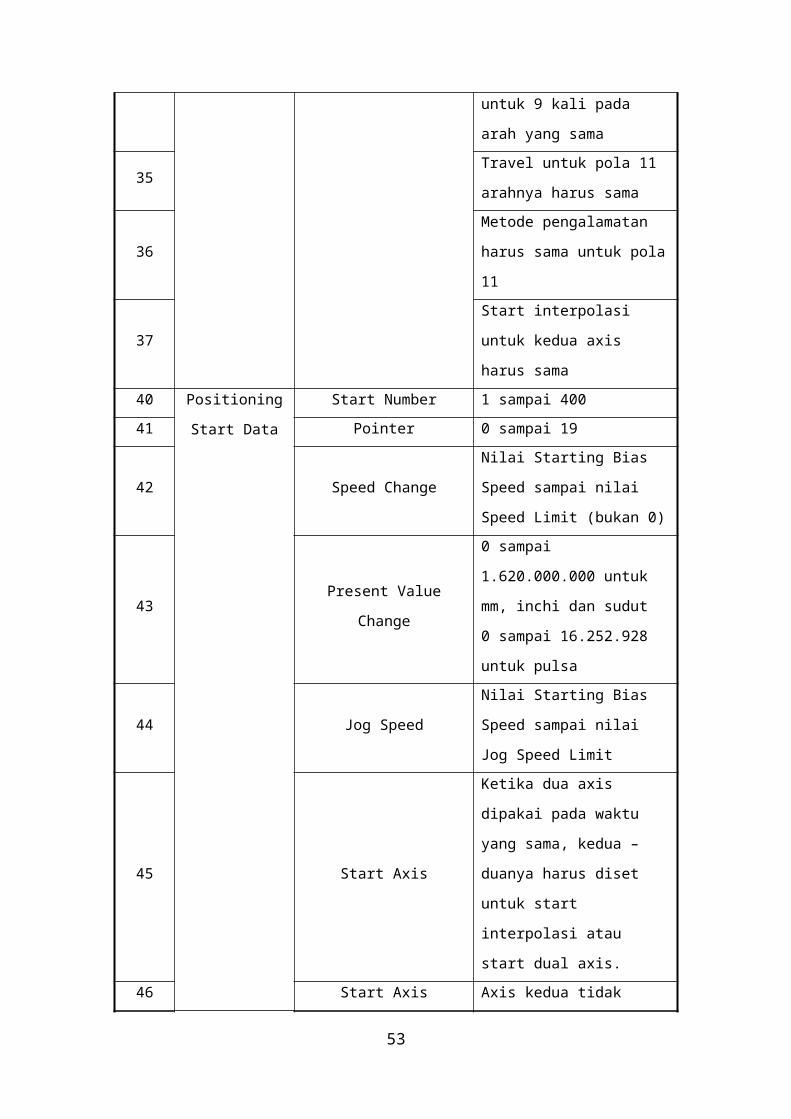
30
Positioning Data
Positioning Speed
Nilai Starting Bias Speed
sampai nilai Speed Limit
(bukan 0)
31 Positioning Address Dengan Stroke Limit
32 Dwell Time 0 sampai 499
33
Positioning Pattern
00, 01, 11 pada bit 0 dan 1
34Pola 11 digunakan untuk 9 kali
pada arah yang sama
35Travel untuk pola 11 arahnya
harus sama
36Metode pengalamatan harus
sama untuk pola 11
37Start interpolasi untuk kedua
axis harus sama
40 Positioning Start Start Number 1 sampai 40039

Data
41 Pointer 0 sampai 19
42 Speed Change
Nilai Starting Bias Speed
sampai nilai Speed Limit
(bukan 0)
43 Present Value Change
0 sampai 1.620.000.000 untuk
mm, inchi dan sudut
0 sampai 16.252.928 untuk
pulsa
44 Jog SpeedNilai Starting Bias Speed
sampai nilai Jog Speed Limit
45 Start Axis
Ketika dua axis dipakai pada
waktu yang sama, kedua –
duanya harus diset untuk start
interpolasi atau start dual axis.
46 Start Axis
Axis kedua tidak boleh Busy
ketika start interpolasi atau start
dual axis dilaksanakan
Tabel 3.2 Data Range Error
2. AD71 Hold Error
Kode
ErrorTitik Pemeriksaan Definisi Error Perbaikan
50Operation Elements
Pengoperasian error (kesalahan
perangkat keras)
Ganti dengan yang
baru
51 Seluruh memori belum dihapus Bersihkan memori
52 AD71 Bus ErrorBus AD71 error Ganti dengan yang
baru
Tabel 3.3 AD71 Hold Error
3. Buffer Memory Write Error
40
Kode
ErrorAlamat Memori Definisi Error
60 39, 339Nilai Pointer bukan 0. Data ditulis kedalam
Buffer Memory dalam keadaan BUSY
61 40, 340Kecepatan berubah ketika sedang menjalankan
interpolasi
62 41, 42, 341, 342Nilai saat ini berubah ketika dalam keadaan
BUSY
63 7872 sampai 7928 Data ditulis dari CPU ketika Y1D sedang sibuk
64Saat memonitoring nilai speed
saat ini
Data ditulis dari CPU ke area terlarang
Tabel 3.5 Buffer Memory Write Error
4. AD71 Start and Operation Errors
Kode
ErrorPenyebab Perbaikan
70Sinyal READY tidak menyala
saat start
Set unit menjadi READY
71Sinyal Stop Eksternal (6A dan
8A) menyala ketika start
Matikan sinyal Stop
72
Sinyal AD71 Ready (X1) dan
Sinyal PC Ready (Y1D) tidak
menyala saat start
Nyalakan sinyal PC Ready dari CPU.
Periksa perangkat keras
73Axis yang bersangkutan sibuk
(Busy) saat start
Jangan men-Start ketika sedang Busy
74
Sinyal Positioning Complete
dari axis yang dijalankan
menyala ketika start
Nyalakan kembali setelah mematikan sinyal
start
75Sinyal M Code menyala ketika
start
Matikan sinyal M Code dengan menggunakan
sinyal M Code OFF
76Sinyal Stop (Y25, Y26)
menyala saat start
Matikan sinyal stop (Y25, Y26)
77Zero Return dijalankan lebih
dari dua kali dalam satu waktu
Zero Return tidak dapat diulang
78 Sinyal Zero Return Complete
menyala ketika Zero Return
Zero Return telah selesai.
Pindahkan pengoperasian Positioning ke Jog
41

bekerja
79Range pulsa diluar 0 sampai
16.252.928
Ubah nilai
Tabel 3.6 AD71 Start and Operation Errors
5. AD71 Positioning Start Error During Busy
Kode
ErrorPenyebab Perbaikan
80Sinyal Ready mati ketika
sedang Busy
Periksa Drive Unit dan nyalakan sinyal Ready
81 Zero Return berhentiZero Return tidak boleh dijalankan lebih dari
dua kali berturut - turut
Tabel 3.7 AD71 Positioning Start Error During Busy
6. Error Lainnya
Kode
ErrorJenis Data Titik Pemeriksaan Perbaikan
90
Parameter
Mode PositioningData yang dimasukkan diluar
dari 0 sampai 2
91Emergency Deceleration
Time
Data yang dimasukkan diluar
dari 64 sampai 50.000 (mdtk)
92Start Processing
Error
-
Interpolasi dinyalakan ketika
dalam mode control switching
untuk Speed dan Positioning
93 Restart AreaNyalakan kembali setelah
menyesaikan Positioning
94
Start Data Error
Start NumberNomor restart berbeda dari nilai
yang dijalankan
95Travel Distance change
area
Data yang dimasukkan diluar
dari 0 sampai nilai Stroke
Upper Limit
96Buffer Memory
Write Protected
Setting Travel Distance
area
Data yang dimasukkan dari
CPU masuk ke area terlarang
140 Data at Positioning Manual Pulse Output Data yang dimasukkan diluar
42

Start Speed dari 1 sampai 2.000 pulsa
Tabel 3.8 Error Lainnya
3.6.2 Kode Error Amplifier MRJ-20A
Untuk melihat error apa yang terjadi, maka dapat dilihat pada Alarm History pada servo
amplifier. Cara lain untuk melihat alarm adalah dengan mengecek sinyal D0 yang diset pada
Parameter No.19.
Alarm
KodeLetak Error Penyebab Penanggulangan
10 Under Voltage
- Tegangan sumber daya
kurang.
- Penyalaan sumber daya
secara mendadak.
- Periksa input tegangan
ke Power Supply.
- Periksa output tegangan
Power Supply.
12 Memory Error 1 RAM atau ROM error. Ganti dengan yang baru.
15 Memory Error 2 EEPROM error. Ganti dengan yang baru.
16Polarity Detect
Error
Kabel konektor terlepas,
sehingga motor tidak
terdeteksi.
Pasang kabel konektor
sampai benar-benar
terhubung.
17 PCB ErrorUnit error terutama bagian
PCB.Ganti dengan yang baru.
30 Over Regeneration. Transistor regenerative rusak. Ganti dengan yang baru.
31 Overspeed Detektor sinyal error.
- Ganti kabel.
- Ganti motor.
- Ganti servo motor.
32 OvercurrentOutput terminal U, V, W
hubung singkat.Perbaiki pengawatan.
33 OvervoltageTegangan yang masuk terlalu
tinggi.Periksa power supply
35
Error In The
Command
Frequency
Pulsa keluaran Amplifier
servo melebihi batas
maksimum.
Ganti dengan Amplifier
servo yang baru.
45
Main Circuit
Element
Overheating.
Rangkaian utama Amplifier
servo terlalu panas.
Ganti Amplifier servo
dengan yang baru.
50 Overload Pemasangan terminal U, V, Pasang kabel U, V, W
43
W tidak benar, sehingga arus
berlebih menyalakan thermal
elektronik.
dengan benar.
52Excessive
Difference
Settingan parameter 5 terlalu
kecil.
Rubah settingan parameter
5.
90
Switch to
Diagnosis Display
While Servo Is On
Sinyal Servo On menyala. Set sinyal servo On
CPU CPU ErrorCPU tida beroperasi sebagai
mana mestinya.
Coba nyalakan kembali
sumber daya yang masuk.
C0Communication
Error.Servo Amplifier error.
Ganti Servo Amplifier
dengan yang baru.
Tabel 3.9 Kode Error Amplifier
3.7 Menentukan Perbandingan Gear Elaktronik
44
Dalam pembuatan alat simulasi Servo Motor, perhitungan secara mekanik sangat
mendukung untuk proses pergerakan ball screw nantinya, selain wiring control. Kontruksi
mekanis tadi harus diperhitungkan benar. Terutama pada perhitungan Electronic Gear yang
berfungsi untuk merubah nilai perjalanan Ball Screw per pulsa, dan hal tersebut dalam Setting
Parameter dilakukan pada nilai Travel per Pulsa.
Menentukan Electronic Gear
Perhitungan Gear = Z1 : Z2 = 56 : 56 n = = = 1 : 1
PF ( Feed Back Pulse ) = 4000 Pulse/ RevSesuai dengan Encoder untuk type MR-FC
1. Travel per Feed Back Pulse (ΔS)
Δl ( Gerakan Per Feed Back Pulsa )
Maka settingan CDV dan CMX pada ampli adalah 1
Rumus Untuk Menentukan Elektronik Gear (english version)
45
Z2 56Z1 56Servo Motor
Z1=561 mm
Z2=56
.............................................................................(3.1)
f0 : Command pulse frequency [ pps]CMX : electronic Gear
(Commanded pulse multiplication numerator)CDV : electronik Gear
(Commanded pulse multiplication denumerator)No : Servo Motor Speed [r/min]Pt : Number of Feedback pulses [pulses/rev]
( Pt = 4000 for HA-FE)
- Electronic gear
....................................................................................(3.2)
- Command pulses
.....................................................................................(3.3)
[Setting Example]Obtain tha command pulse frequency required to run the HA-FE at 3000r/min. When the electronic gear ratio 1 ( initial parameter value) is used, the following result is found according to equation 3.3 :
(command pulse frequency)
However, as the maximum input command pulse frequency in the open colector system is 200kpps, so for general HA-FE is not problem.If for general purpose servo with Pt= 8192, so the f0=409600pps cannot be entered.To run the servo motor at the speed of 3000r/min at not more than 200kpps, the electronic gear setting must be changed. This electronic gear is found by Equation 3.3:
Therefore, the parameters are set to CMX=256
CDV = 125
APENDIX
46
47

48
49

50

51

52
53

54


















